Содержание
Привод шагового двигателя схема
А разве с коллектора VT1 на корпус не нужен резистор для надёжного открытия VT4 при нуле на входе канала? VT4 открывается при единице не входе канала. Я думаю что если поставить такой резистор то это может помешать открытию VT3 так как часть тока будет идти через этот резистор и в базу VT3 попадёт меньше а если сделать сопротивление этого резистора слишком большим то это большого вклада в открытие VT4 не внесёт так как через VT1 ток будет больше. Но если честно то я не знаю какие эффекты насколько будут проявляться так как не рассчитывал всё подробно м. Не желательно так как искрить переключатели будут. Как «крутить» шаговый двигатель без микроконтроллера.
Поиск данных по Вашему запросу:
Привод шагового двигателя схема
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Как подключить шаговый двигатель с 6 выводами
- Контроллер шагового двигателя
- Главное меню
- Шаговый двигатель
- Драйвер биполярных шаговых двигателей
- Драйвер шагового двигателя A4988
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
- Драйверы шаговых двигателей
- Шаговый двигатель своими руками, принцип работы, схема подключения. Схема шагового двигателя
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Шаговый Двигатель Без Драйвера — Stepper Motor Run Without Driver
 youtube.com/embed/PVylCDeHET4″ frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/PVylCDeHET4″ frameborder=»0″ allowfullscreen=»»/>
Как подключить шаговый двигатель с 6 выводами
Комплект привода D2 имеет высокое быстродействие и обеспечивает точное позиционирование. Сервоусилители поддерживают цифровую сеть EtherCAT, что позволяет обеспечить высокую скорость управления приводом. Комплект привода D1 имеет высокое быстродействие и обеспечивает точное позиционирование. Инкрементальные энкодеры Autonics с диаметром корпуса от 40 до мм. Абсолютные энкодеры Autonics с диаметром корпуса от 50 до 60 мм. Шаговый привод — это мехатронное устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Шаговый привод, как правило, состоит из двух основных составляющих частей. Это, так называемый, драйвер , принимающий импульсы от устройства управления верхнего уровня и формирующий напряжение питания шагового двигателя. И, во-вторых, это шаговый двигатель , вал которого, в зависимости от поданного на него напряжения питания, поворачивается на строго определенный, небольшой угол в ту или другую сторону.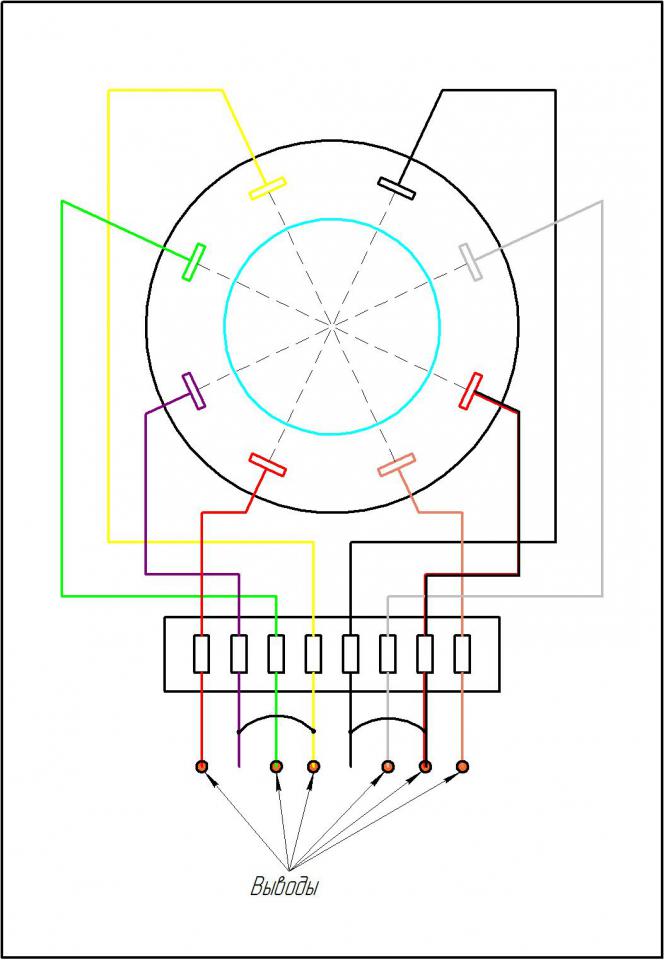
Устройства управления верхнего уровня контроллеры шагового привода формируют импульсные сигналы для точного управления драйверами шаговых двигателей и шаговыми двигателями в зависимости от управляющей программы, записанной, например, в память этого управляющего устройства. На рисунках ниже представлен внешний вид шагового двигателя с выступающим валом и внешний вид драйвера шагового привода на примере драйвера производства фирмы Autonics.
Контроллер шагового привода может иметь вид, представленный на рисунке ниже. Принцип работы шагового двигателя можно объяснить следующим образом. Допустим имеются два электромагнитных контура см. Магнит может вращаться вокруг оси, перпендикулярной направлениям магнитных линий этих контуров. Представим себе, что выключатель В замыкается. После такого шагового движения ротор этого двигателя остановится в вертикальном положении.
При этом ротор опять займет горизонтальное положение, но теперь южный полюс постоянного магнита будет слева. Ротор опять замрет в таком состоянии до момента прихода следующего токового импульса.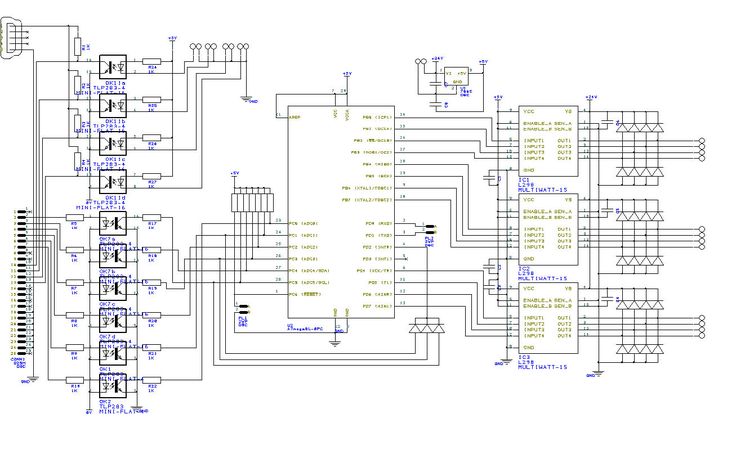
Наличие постоянного магнита на роторе шагового двигателя не обязательно. Ниже представлена схема конструкции шагового двигателя, где ротор выполнен из магнитомягкого материала. Здесь, подавая импульсы тока на обмотки полюсов статора, можно заставить ротор совершать шаговые движения от одного полюса статора к другому. Как правило, промышленные шаговые двигатели имеют гибридную конструкцию и сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора. Статор гибридного двигателя имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.
Обычно используются 8 основных полюсов для двигателей с полным шагом 1. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора. Это происходит из-за соответствующего расположения зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы одной половинки ротора являются северными полюсами, а зубцы второй половинки — южными. Кроме того, половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок.
Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе.
Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз с двух до пяти. Поэтому пятифазные шаговые двигатели получили распространение в высокоточных системах приводов подач станочного оборудования. Режим дробления шага микрошаг реализуется при совместном управлении током в разных обмотках шагового электродвигателя.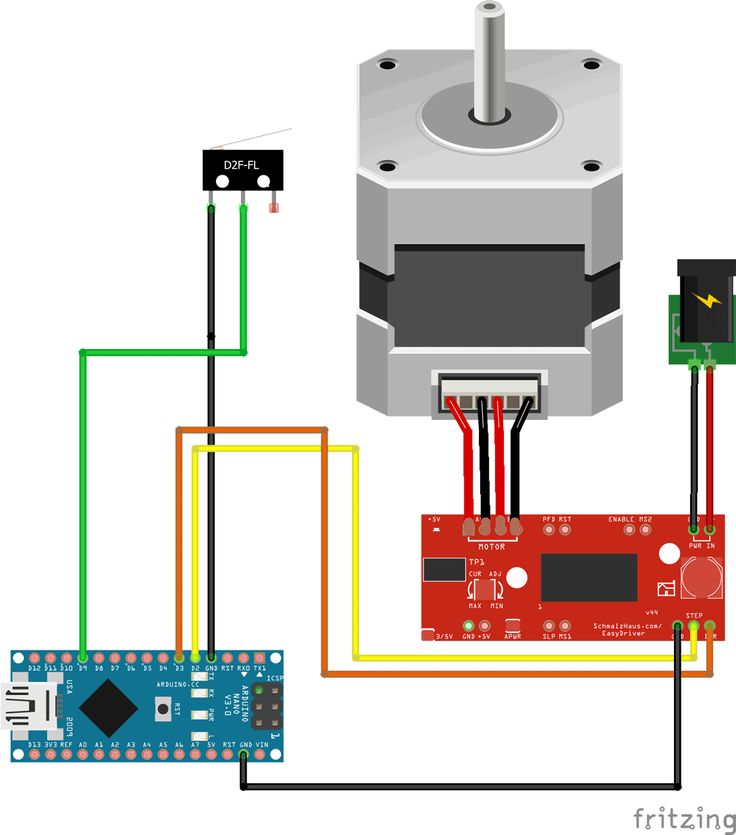
Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом, можно повысить плавность вращения ротора и точность позиционирования. При осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг этого положения.
Время переходного процесса в большой степени зависит от характеристик нагрузки. Во многих приложениях такие колебания являются нежелательными. Микрошаговый режим позволяет в значительной степени эти колебания. На рисунке ниже показаны перемещения ротора при работе в полношаговом и микрошаговом режимах. Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ.
Шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения.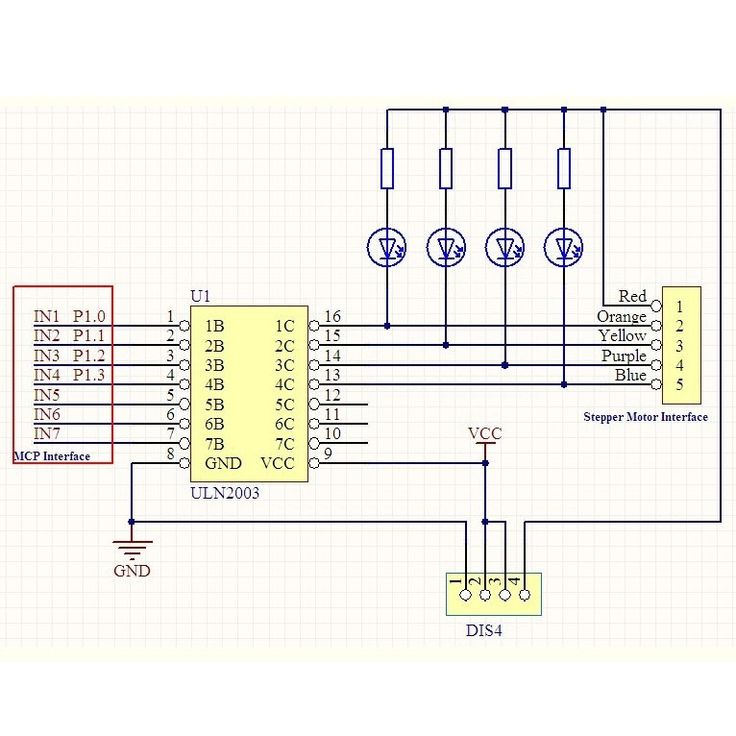 Главное преимущество шаговых приводов — простота при высокой точности. При подаче потенциалов на обмотки шаговый двигатель повернется строго на определенный угол. К преимуществам можно отнести стоимость шаговых приводов, которые значительно дешевле сервоприводов с обратной связью. Это наиболее известная проблема этих двигателей.
Главное преимущество шаговых приводов — простота при высокой точности. При подаче потенциалов на обмотки шаговый двигатель повернется строго на определенный угол. К преимуществам можно отнести стоимость шаговых приводов, которые значительно дешевле сервоприводов с обратной связью. Это наиболее известная проблема этих двигателей.
Потеря шагов может произойти при большой нагрузке на валу, большом ускорении старта или торможения, при резонансных явления в системе, где установлен шаговый привод. Основные характеристики шагового двигателя — это удерживающий момент синхронизирующий момент, «max. Величина удерживающего момента, приводимая в спецификации, соответствует номинальному току через обмотки двигателя.
Рабочий момент в системе должен быть в несколько раз меньше этой предельной характеристики. Предельная частота следования импульсов, при которой возможен пуск и остановка двигателя без потери шага, называется приемистостью шагового привода.
Следует помнить, что с увеличением частоты вращения шагового двигателя значительно падает момент , который может развить этот двигатель. Зависимость развиваемого момента и частоты следования импульсов, как правило, приводятся производителями шаговых двигателей. Пользователю всегда следует обращать внимание на данные частотные характеристики.
Зависимость развиваемого момента и частоты следования импульсов, как правило, приводятся производителями шаговых двигателей. Пользователю всегда следует обращать внимание на данные частотные характеристики.
Частотные преобразователи Частотники Частотники Bosch Rexroth. Энкодеры Энкодеры Autonics Инкрементальные энкодеры Autonics Инкрементальные энкодеры Autonics с диаметром корпуса от 40 до мм.
Абсолютные энкодеры Autonics Абсолютные энкодеры Autonics с диаметром корпуса от 50 до 60 мм. На главную Каталог товаров Шаговый привод Шаговый привод. Шаговый привод Шаговый привод — это мехатронное устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Последние новости. Представляем Вам наш новый продукт — частотные преобразователи Bosch Rexroth Полезные ссылки Главная Карта сайта Заявка. Контакты Тел. Связаться с нами Оставайтесь всегда с нами!
Контроллер шагового двигателя
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения. Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов.
Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения. Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов.
(Fan of hard drive) — YouTube Посадочный Талон. Подробнее.. YouTube. Простая схема запуска шагового двигателя с реверсом. — YouTube Cnc, Задачи.
Главное меню
Ниже представлена принципиальная схема драйвера биполярных шаговых двигателей с двумя L усиленный 48В, 4А. Данный драйвер может использоваться для управления практически любых 2-фазных биполярных гибридных шаговиков с 4 выводами и может обеспечить ток работы до 4 ампер при максимальном напряжении 35В. Цепочкой R9 и C15 можно подбирать частоту ШИМ, при указанных номиналах она выше диапазона слышимых звуков, так что движок не жужжит.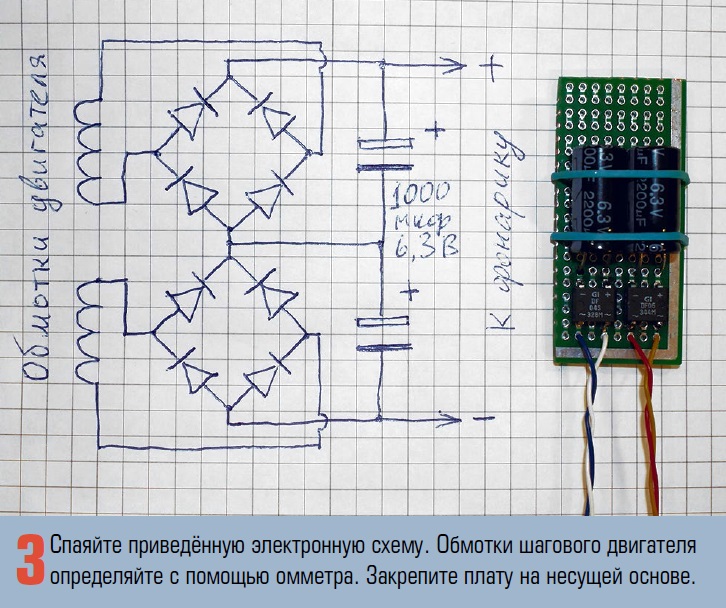 Потенциометром RV1 устанавливается рабочий ток двигателя. Если будете гонять на максимальной мощности , то нужно обязательно посадить его на хороший радиатор и поставить кулер, также не забудьте намазать термопастой. Скачать список элементов PDF. Средний балл статьи: 0 Проголосовало: 0 чел.
Потенциометром RV1 устанавливается рабочий ток двигателя. Если будете гонять на максимальной мощности , то нужно обязательно посадить его на хороший радиатор и поставить кулер, также не забудьте намазать термопастой. Скачать список элементов PDF. Средний балл статьи: 0 Проголосовало: 0 чел.
Шаговый двигатель
Комплект привода D2 имеет высокое быстродействие и обеспечивает точное позиционирование. Сервоусилители поддерживают цифровую сеть EtherCAT, что позволяет обеспечить высокую скорость управления приводом. Комплект привода D1 имеет высокое быстродействие и обеспечивает точное позиционирование. Инкрементальные энкодеры Autonics с диаметром корпуса от 40 до мм. Абсолютные энкодеры Autonics с диаметром корпуса от 50 до 60 мм.
Предшественником шагового двигателя является серводвигатель.
Драйвер биполярных шаговых двигателей
Здесь будет рассматриваться драйвер как отдельный блок. Источник: bezkz. Теги Шаговый двигатель управление. Похожите материалы Часы на микроконтроллере. Подойдет ли такая схема для управления биполярным ШД?
Подойдет ли такая схема для управления биполярным ШД?
Драйвер шагового двигателя A4988
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Речь в этой статье идет о простых драйверах, достаточных для большинства приложений. Существуют драйверы с гораздо большими возможностями:. По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Драйвер униполярного шагового двигателя. Напомню принцип управления униполярным шаговым двигателем. Четыре обмотки с общим проводом, подключенным к одному полюсу источника питания. Для коммутации обмоток таким способом достаточно всего четырех ключей, замыкающих обмотки на землю.
Схемы драйверов шагового двигателя. Подключение шагового Драйвер биполярного шагового двигателя LN. Характеристики.
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
Привод шагового двигателя схема
OpenRobo Производство на роботах. Драйвер шагового двигателя своими руками Содержание этой части обучения. Как крутить шаговый двигатель.
Как крутить шаговый двигатель.
Драйверы шаговых двигателей
ВИДЕО ПО ТЕМЕ: ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]
ШИМ генератор, компаратор тока, RS триггер и драйвер полевого транзистора. А чип L — и вовсе безмозглый, это просто драйвер, позволяющий преобразовывать. Шаговый двигатель подключается к точкам Скачать драйвер биполярного шагового двигателя: Статья: Контроллер. Простой контроллер Шагового Двигателя из компьютерного барахла. Диод, при этом исключается пробой транзистора, а следовательно и вывод его из строя.
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники.
Шаговый двигатель своими руками, принцип работы, схема подключения.
 Схема шагового двигателя
Схема шагового двигателя
Шаговые двигатели уже давно и успешно применяются в самых разнообразных устройствах. Их можно встретить в дисководах, принтерах, плоттерах, сканерах, факсах, а также в разнообразном промышленном и специальном оборудовании. В настоящее время выпускается множество различных типов шаговых двигателей на все случаи жизни. Однако правильно выбрать тип двигателя — это еще пол-дела. Не менее важно правильно выбрать схему драйвера и алгоритм его работы, который зачастую определяется программой микроконтроллера. Цель этой статьи — систематизировать сведения об устройстве шаговых двигателей, способах управления ими, схемах драйверов и алгоритмах.
Управление шаговым двигателем выполняется в пошаговом или саморазгонном режиме. Диапазон регулировки максимального выходного тока, А — от 3 до 6; 2. Режим работы: саморазгонный; пошаговый.
Изучаем миниатюрный шаговый двигатель / Хабр
Дмитрий Левкин
- Конструкция
- Характеристики
- Типы шаговых двигателей Реактивный шаговый двигатель
- Шаговый двигатель с постоянными магнитами
- Гибридный шаговый двигатель
Шаговый электродвигатель
— это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.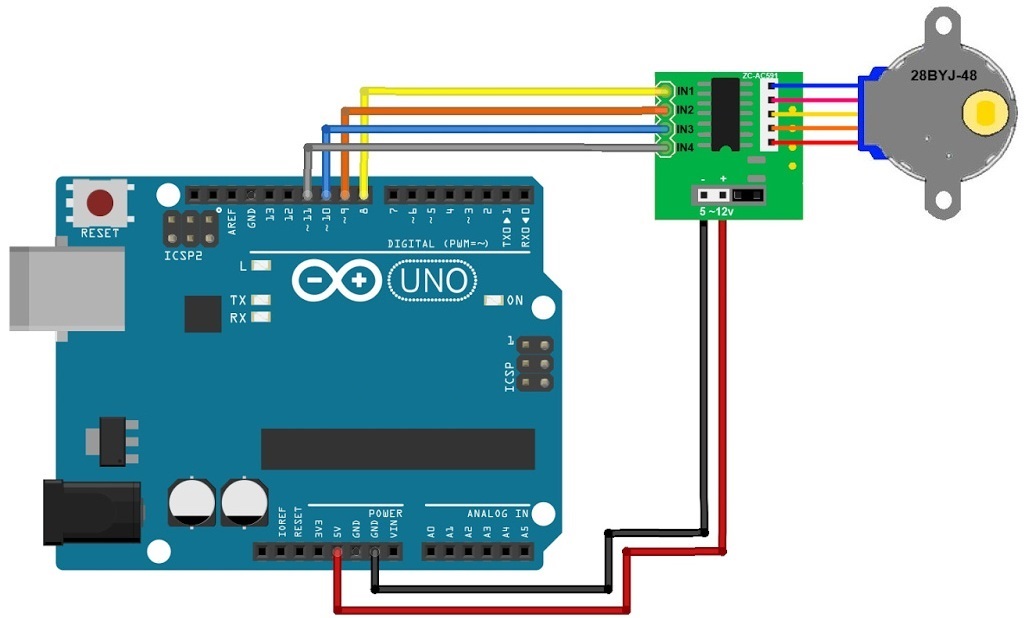
Конструкция шагового электродвигателя
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор
не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор
шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Статор шагового двигателя обычно имеет от двух до пяти фаз.
Характеристики
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг
ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор.
 Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей. - Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
 Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.Реактивный шаговый двигатель
Реактивный шаговый двигатель — синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель (шаг 30°)
Четырехфазный реактивный шаговый двигатель (шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.
Униполярные электромоторы гораздо более удобны в управлении.
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
- Таким образом по виду обмоток выделяют два типа шаговых двигателей:
- униполярный (однополярный),
- биполярный (двухполярный).

Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Схема униполярного двухфазного шагового двигателя
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом.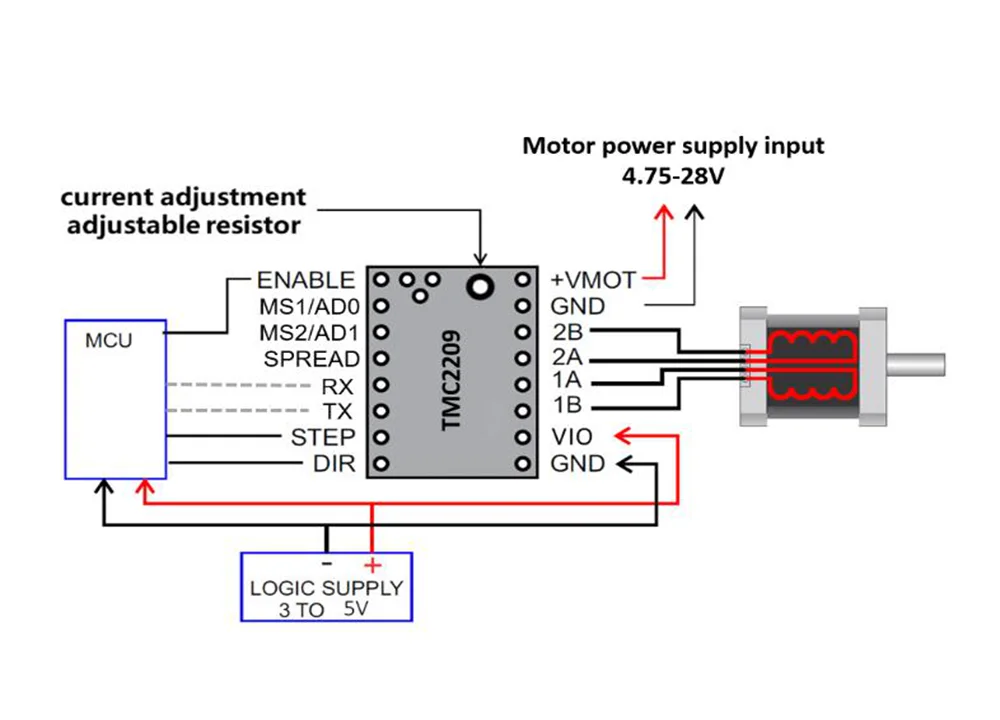 Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.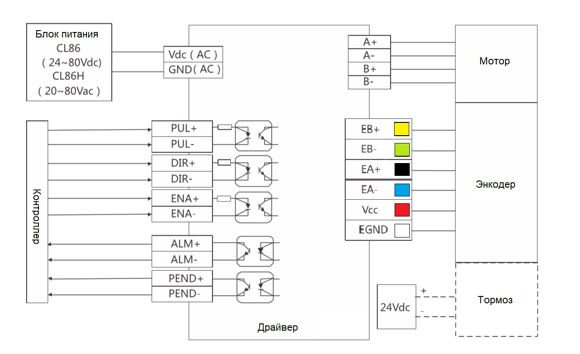
- Существует несколько способов управления:
- волновое,
- полношаговое,
- полушаговое.
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление
. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.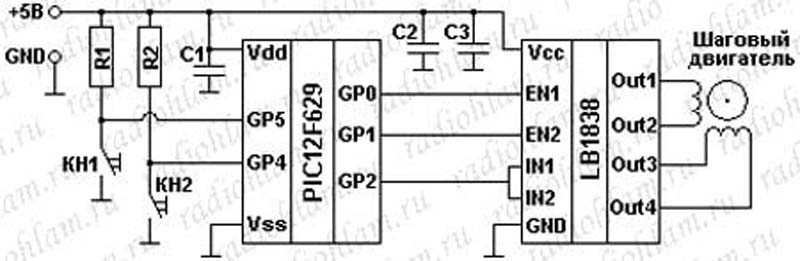 Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Схема 4 выводного биполярного шагового двигателя
Схема 5 выводного униполярного шагового двигателя
Схема 6 выводного униполярного шагового двигателя
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно.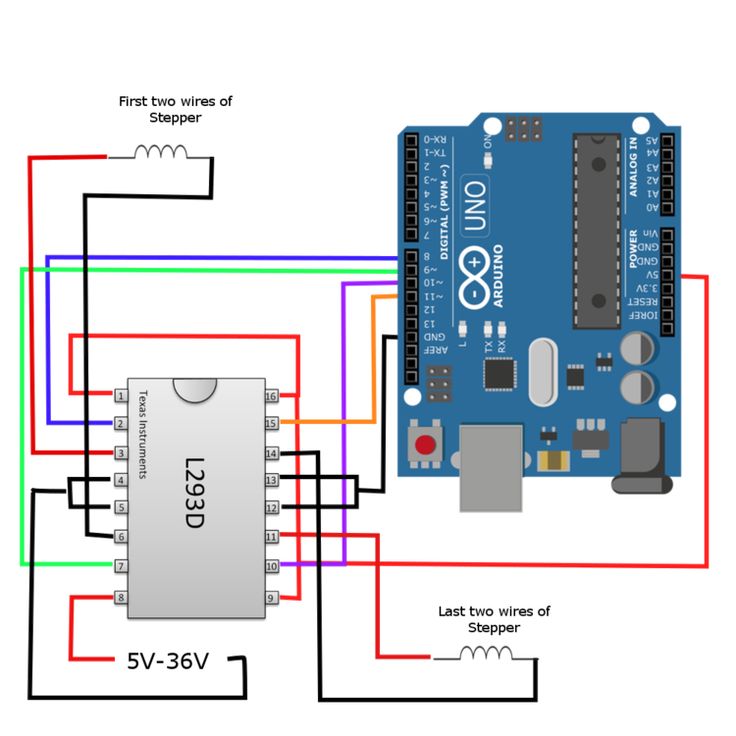 Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление — комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Особенности управления
Для управления двигателем с дискретным движением ротора используются следующие режимы: полношаговый, полушаговый и микрошаговый.
Полношаговый режим
При таком способе двигателем производится попеременная коммутация фаз. При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
Угол шага при этом остается неизменным.
Полушаговый режим
Если каждый второй шаг включать одну фазу, а между этим включать сразу две, можно увеличить количество перемещений на один оборот в два раза. Такая коммутация, соответственно, в два раза уменьшает угол шага. При этом достичь полного момента в полушаговом режиме невозможно. Режим активно используется, так как позволяет простым способом вдвое увеличить число шагов двигателя. Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания. Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Микрошаговый режим
Чтобы максимально увеличить число шагов двигателя, используется микрошаговый режим.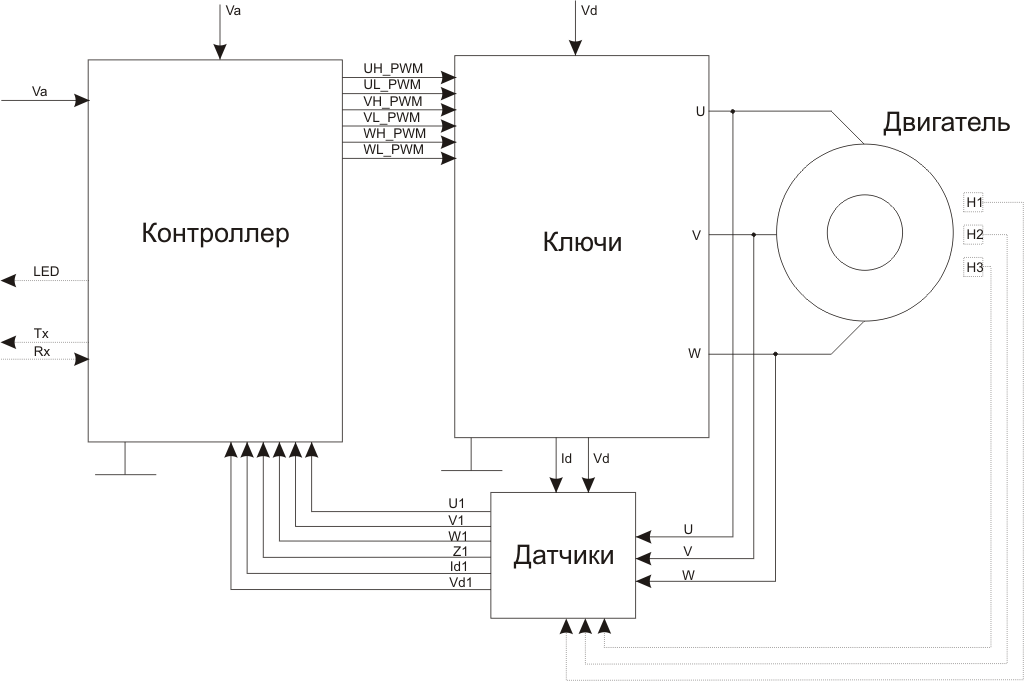 Для этого требуется включить две фазы и распределить ток обмоток неравномерно. При смещении магнитного поля статора относительно полюсов смещается и сам ротор. У диспропорции токов между рабочими фазами двигателя обычно наблюдается дискретность, которая определяет величину микрошага. Количество микрошагов на один оборот ротора шагового двигателя может составлять более 1 000. Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Для этого требуется включить две фазы и распределить ток обмоток неравномерно. При смещении магнитного поля статора относительно полюсов смещается и сам ротор. У диспропорции токов между рабочими фазами двигателя обычно наблюдается дискретность, которая определяет величину микрошага. Количество микрошагов на один оборот ротора шагового двигателя может составлять более 1 000. Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Гибридный шаговый двигатель
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки .
Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки .
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор — постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
Преимущества ШД
Для перемещения стола и шпинделя используются шаговые двигатели или сервомоторы. ШД дешевле, но стоимость – не единственный плюс. Они характеризуются рядом дополнительных преимуществ, которые при построении портальных станков обуславливают выбор в пользу приводов этого типа:
- легкость настройки. Успех пуска системы с ШД зависит только от правильности его подключения и корректного выбора драйвера. Сервомотор требуется настраивать дополнительно, он сложнее в подключении и в ремонте;
- неприхотливость в эксплуатации. Для бюджетного портального станка после нескольких лет интенсивной работы не исключается вероятность подклинивания механики. Пиковая нагрузка на ШД в такой ситуации приведет только к пропуску шагов и росту рассогласования, проблема решается перезагрузкой станка. Увеличение нагрузки на слабый сервомотор приведет к перегоранию обмоток, на мощный – к механической поломке передачи;
- у ШД способность к удержанию вала в заданном положении выше. Сервомотор при фиксации ротора склонен к микроколебаниям, ротор ШД остается на одной угловой позиции без сдвигов.
 Сервомотор требуется настраивать дополнительно, он сложнее в подключении и в ремонте;
Сервомотор требуется настраивать дополнительно, он сложнее в подключении и в ремонте;Недостатки: резонанс, инертность, повышенный уровень шума. Первая проблема решается выбором драйвера с функцией подавления резонанса. Инертность – естественный недостаток, следующий из принципа работы ШД, но он проявляется только при быстром разгоне. Перед фрезерно-гравировальными станками ставятся другие задачи – например, при нанесении рельефного изображения на каменную плиту на ускоренные перемещения приходится не более 1% времени. Уровень шума – последний параметр, на который обращают внимание в условиях массового производства, здесь важнее стоимость оборудования (а ШД, напомним, дешевле, чем тихие сервомоторы).
Уровень шума – последний параметр, на который обращают внимание в условиях массового производства, здесь важнее стоимость оборудования (а ШД, напомним, дешевле, чем тихие сервомоторы).
Электродвигатели шаговые
- Подробности
- Категория: Электрические машины
- электродвигатель
Рабочие органы ряда механизмов при выполнении ими производственных операций должны перемещаться дискретно, шагами. К таким механизмам относятся киносъемочная и проекционная аппаратура, приборы времени, механизмы подач различных станков, устройства перемещения валков прокатных станов и многие другие. Для привода этих рабочих органов целесообразно, очевидно, применять двигатель, способный по своему принципу действия обеспечить подобное дискретное движение. Таким двигателем является шаговый двигатель, ротор которого совершает шаговые перемещения определенной величины с фиксацией положения ротора в конце каждого шага.
Широкое распространение шагового электропривода определяется еще и тем обстоятельством, что он хорошо сочетается с цифровыми вычислительными машинами, программными устройствами и различными цифровыми управляющими приборами, которые все шире применяются во многих отраслях техники.
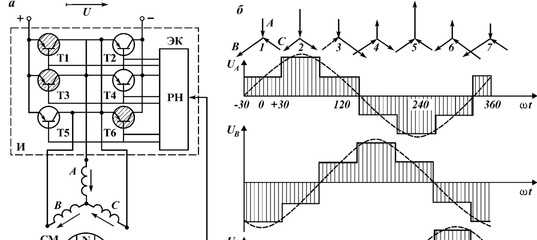
Современный шаговый двигатель по принципу действия является синхронным двигателем, магнитное поле которого перемещается (вращается) в воздушном зазоре не непрерывно, а дискретно, шагами. Это достигается тем, что обмотки статора питаются от специального источника импульсов напряжения, которые подаются на обмотке статора в определенной последовательности.
Принцип получения дискретного перемещения ротора рассмотрим на примере простейшей схемы двухфазного шагового двигателя, изображенной на рис. 1. Отметим, что под числом фаз шагового двигателя понимается количество каналов, по которым двигатель получает напряжение от источника питания. В схеме рис. 1 таких каналов два.
Двигатель имеет на статоре две пары явно выраженных полюсов, на которых находится обмотка возбуждения (управления) — первая I с выводами 1Н — 1К, и вторая II с выводами 2Н — 2К. Каждая из обмоток состоит из двух частей, находящихся на противоположных полюсах двигателя. Эти части (полуобмотки) соединены между собой таким образом, что при подаче напряжения на обмотку образуется магнитное поле с полюсами N—S, а при изменении полярности напряжения изменяется на противоположную и полярность магнитных полюсов.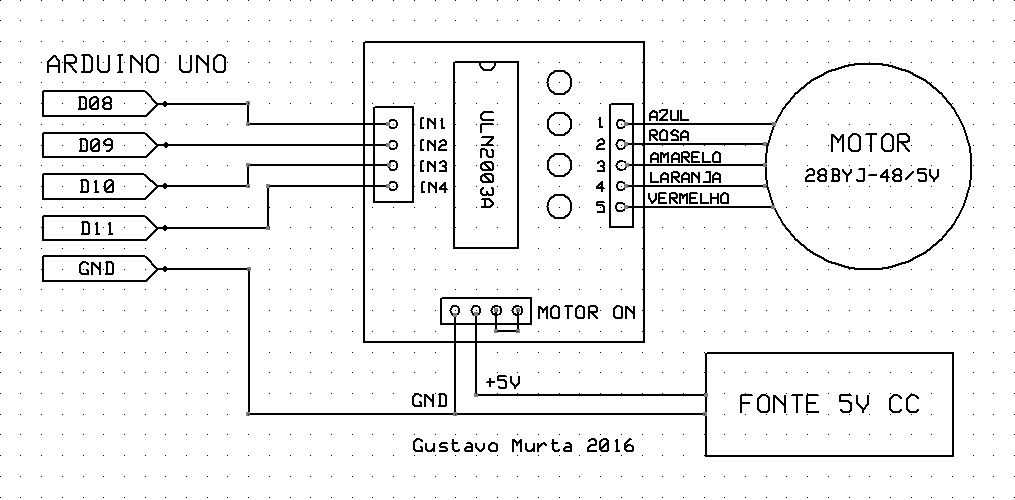
Питание обмоток двигателя осуществляется, как правило, импульсами напряжения прямоугольной формы, поступающими с выхода специального коммутатора напряжения. Коммутатор обычно получает питание в виде напряжения постоянного тока Uu, преобразует его в импульсы напряжения, частота и последовательность которых задается импульсным сигналом управления, и подает их на обмотки двигателя. Коммутатор и шаговый двигатель образуют основную часть шагового привода. Ротор двигателя в рассматриваемой схеме представляет собой двухполюсный постоянный магнит.
Рис. 1. Принцип работы шагового двигателя.
Предположим, что в начальный момент работы шагового двигателя (рис. 1, а) подано напряжение на обмотку I. Протекание тока по этой обмотке вызовет появление магнитного, поля статора с вертикально расположенными полюсами N — S. В результате взаимодействия этого поля с постоянным магнитом ротора последний займет указанное на рисунке положение, в котором оси магнитных полей статора и ротора совпадают и ротор находится в положении устойчивого равновесия. Отметим при этом, что отклонение оси магнитного поля статора или ротора от этого положения вызовет в соответствии с формулой (2) появление синхронизирующего момента, стремящегося вернуть ротор в равновесное положение.
Допустим теперь, что с помощью коммутатора напряжение снято с обмотки I управления и подано на обмотку II с указанной полярностью. Протекание тока по обмотке II приведет к образованию магнитного поля статора уже с горизонтальными полюсами N — S (рис. 1, б). Другими словами, отключение обмотки I и подключение обмотки II вызовут дискретное скачкообразное перемещение оси магнитного поля статора на четверть окружности.
При повороте магнитного поля статора между осями полей статора и ротора появится угол рассогласования и на ротор в соответствии с формулой (2) начнет действовать синхронизирующий момент, стремящийся переместить ротор в новое положение равновесия. Это новое положение ротора будет соответствовать его повороту на четверть окружности (изображено сплошной линией на рис.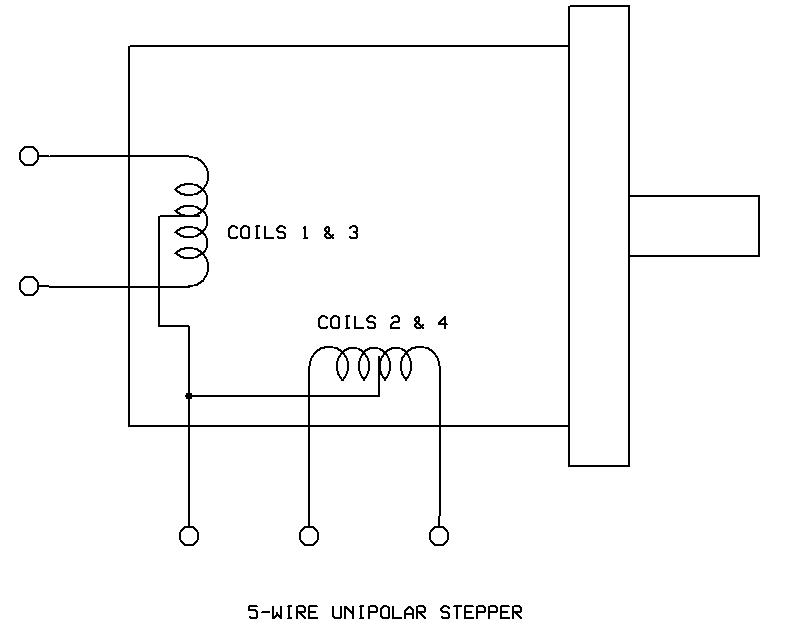 1, б). Таким образом, после переключения обмоток ротор совершил шаговое перемещение на четверть окружности вслед за поворотом магнитного поля статора, причем новое положение ротора также является фиксированным и устойчивым.
1, б). Таким образом, после переключения обмоток ротор совершил шаговое перемещение на четверть окружности вслед за поворотом магнитного поля статора, причем новое положение ротора также является фиксированным и устойчивым.
Предположим далее, что отключилась обмотка II и вновь подано напряжение на обмотку I, однако уже противоположной полярности. Магнитное поле статора при этом (рис. 1, в) вновь дискретно повернется на четверть окружности, но будет иметь уже противоположную приведенной на рис. 1, а полярность полюсов. Вновь на ротор будет действовать синхронизирующий момент, который повернет его в положение, изображенное на рис. 1, в. Следующий шаг в том же направлении ротор может совершить, если будет отключена обмотка I и подключена обмотка II с обратной полярностью напряжения. И, наконец, ротор завершит полный оборот при снятии напряжения с обмотки II и подаче напряжения на обмотку I с полярностью, указанной на рис. 1, а.
Рассмотренный способ коммутации обмоток двигателя, который обеспечивает шаговое перемещение на угол 90°, не является для схемы на рис. 1, а единственно возможным. Существует другой способ, который позволяет при той же конструкции двигателя уменьшить шаг ротора вдвое. Рассмотрим этот способ коммутации.
1, а единственно возможным. Существует другой способ, который позволяет при той же конструкции двигателя уменьшить шаг ротора вдвое. Рассмотрим этот способ коммутации.
Допустим, что исходное положение двигателя соответствует схеме рис. 1, а. Подключим теперь обмотку II с полярностью, соответствующей магнитному полю на рис. 1, б, не отключая в то же время обмотку I. При этом образуется вторая — горизонтальная система полюсов, магнитное поле двигателя будет представлять собой результат сложения магнитных полей двух пар полюсов и ось результирующего поля будет располагаться посередине полюсов с одинаковой полярностью, как это и показано на рис. 1, г. Поэтому ротор после подключения обмотки II повернется только на угол 45° (рис. 1, г), а не на угол 90°.
Для совершения следующего шага в 45е достаточно лишь снять напряжение с обмотки L В этом случае магнитное поле двигателя будет соответствовать изображенному на рис. 1, б и ось магнитного потока статора расположится уже горизонтально. Следующий шаг совершится при подключении обмотки I на противоположную полярность напряжения без отключения обмотки II и т. д. Такая схема коммутации, при которой подключаются поочередно одна или две обмотки, является примером так называемой несимметричной схемы коммутации в отличие от рассмотренной вначале симметричной схемы.
Следующий шаг совершится при подключении обмотки I на противоположную полярность напряжения без отключения обмотки II и т. д. Такая схема коммутации, при которой подключаются поочередно одна или две обмотки, является примером так называемой несимметричной схемы коммутации в отличие от рассмотренной вначале симметричной схемы.
В общем случае угловой шаг рассмотренного двигателя а определяется следующей формулой:
где р— число пар полюсов двигателя; п — количество подключений (тактов) в цикле, равное числу фаз при симметричной коммутации и удвоенному числу фаз при несимметричной коммутации.
Для рассмотренного примера р = 2, п = 2 для первой схемы коммутации и п — 4 для второй схемы, соответственно
Шаговый двигатель легко позволяет реверсировать (изменять на противоположное) направление своего движения при любом положении ротора. Для реверса двигателя, например, при симметричной схеме коммутации достаточно включить на обратную полярность напряжения обмотку, которая была отключена на данном такте коммутации.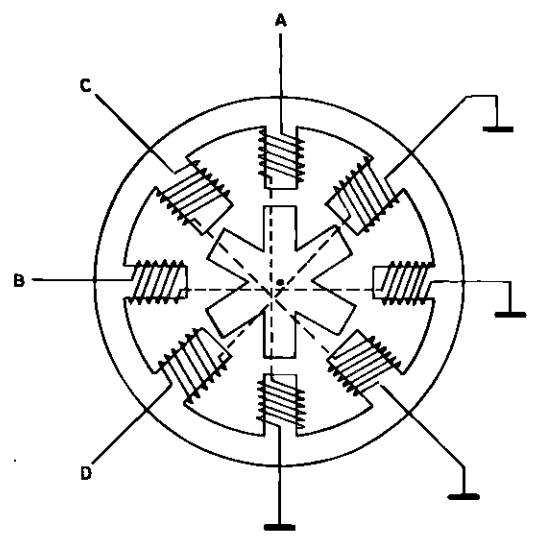 Ротор двигателя при этом совершит шаг в противоположном направлении.
Ротор двигателя при этом совершит шаг в противоположном направлении.
Выше уже говорилось о том, что. управляющим сигналом для шагового привода является, как правило, маломощный импульсный сигнал, поступающий на вход шагового привода от цифрового управляющего прибора или программного устройства. При нормальной работе шагового двигателя каждому импульсу управления строго соответствует шаг двигателя, причем это соотношение выполняется как в установившемся, так и в переходных режимах работы двигателя.
Установившийся режим работы двигателя соответствует постоянной частоте управляющих импульсов, при этом средняя частота вращения ротора пропорциональна этой частоте. Движение ротора в установившемся режиме может иметь монотонный или колебательный характер в зависимости от сочетания параметров двигателя, нагрузки и. частоты управляющего сигнала.
К переходным режимам двигателя относятся его пуск, реверс, торможение и переход с одной частоты управляющих импульсов на другую. Пуск двигателя осуществляется скачкообразным (или постепенным) увеличением частоты входного сигнала от нуля до рабочей, торможение — снижением частоты до нуля, а реверс — изменением последовательности коммутации обмоток двигателя.
Пуск двигателя осуществляется скачкообразным (или постепенным) увеличением частоты входного сигнала от нуля до рабочей, торможение — снижением частоты до нуля, а реверс — изменением последовательности коммутации обмоток двигателя.
Переходные режимы являются для шагового двигателя наиболее сложными, так как вследствие электромагнитной инерции обмоток двигателя, механической инерции его ротора и наличия момента нагрузки на валу ротор двигателя может не успеть отработать полностью все импульсы, поступившие на вход шагового привода. Та максимальная частота управляющих импульсов, при которой возможен пуск двигателя из неподвижного состояния без выпадения из синхронизма (пропуск шагов), называется частотой приемистости. Чем выше электромагнитная и механическая инерция двигателя, чем больше момент его нагрузки, тем частота приемистости меньше. С другой стороны, увеличение максимального значения синхронизирующего момента двигателя и уменьшение углового шага позволяют повысить верхний предел частоты приемистости.
Современные шаговые двигатели имеют многообразные конструктивные исполнения. Основная их классификация производится чаще всего в зависимости от числа фаз двигателя и устройства магнитной системы. Шаговые двигатели бывают однофазными, двухфазными и многофазными и могут иметь активный или пассивный ротор. Рассмотрим основные типы шаговых двигателей и их количественные характеристики и параметры.
Шаговые двигатели с активным ротором имеют ротор, выполненный из постоянных магнитов или снабженный обмоткой возбуждения, как у обычных синхронных двигателей. Широкое распространение получили вследствие своей высокой экономичности и надежности в работе, технологичности изготовления, небольших габаритов и веса двигатели с ротором из постоянных магнитов. Этот тип двигателя и приведен в качестве примера на рис. 1. Обычно шаговые двигатели с активным ротором имеют относительно крупный шаг ротора — от 90 до 15°, что связано главным образом с трудностями изготовления активного ротора с малыми полюсными делениями. Уменьшение шага в таких двигателях может достигаться увеличением числа фаз и тактов коммутации, а также применением двухстаторной или двухроторной конструкции двигателя.
Уменьшение шага в таких двигателях может достигаться увеличением числа фаз и тактов коммутации, а также применением двухстаторной или двухроторной конструкции двигателя.
Максимальные частоты вращения шаговых двигателей этого типа составляют 2000—3000 об/мин, а их частота приемистости лежит в пределах от 70 до 500 Гц.
Отечественной промышленностью выпускается несколько серий таких шаговых двигателей: четырехфазные типа ШДА, двух- и четырехфазные типа ДШ и ДША соответственно, трехфазные типа ШДА-3 и ряд других. Некоторые технические данные этих двигателей приведены в табл. 10, где fn — частота приемистости двигателя при номинальной нагрузке, a Un — напряжение постоянного тока источника питания.
Таблица 2
|
|
|
|
|
|
|
|
ДИР-1Б | 3,6 | 4 | 400 |
| 80 | 27 | 0,16 |
ДШ-0. | 22,5 | 4 | 25 | 2,5 | 450 | 27 | |
ДШ-0.04А | 22,5 | 4 | 40 | 3,5 | 450 | 27 | |
ДШ-0,1А | 22,5 | 4 | 100 | 19 | 300 | 27 | 0,5 0,9 1,6 |
ДШ-0.25А | 22,5 | 4 | 250 | 58 | 250 | 27 | |
ДШ-0. | 22,5 | 4 | 400 | 125 | 200 | 27 | |
ДШ-1А | 22,5 | 4 | 1000 | 420 | 150 | 27 | 3,0 |
ЦШ-4А | 18 | 4 | 4000 | 1370 | 100 | 27 | 8,1 |
ДШ-6А | 18 | 4 | 6000 | 2300 | 80 | 27 | 11,5 |
ДШ-10А | 18 | 4 | 10000 | 4200 | 70 | 27 | 14,8 |
ШДА-1А | 22,5 | 4 | 40 | 3 | 50 | 14 28 | 0,12 |
ШДА-1Ф-К | 22,5 | 4 | 30 | 3 | 50 | 0,14 | |
ЩДА-2А | 22,5 | 4 | 110 | 6,8 | 50 | 14 | 0,21 |
ШДА-2Ф -К | 22,5 | 4 | 60 | 6,8 | 125 | 0,23 | |
ШДА-ЗА | 22,5 | 4 | 280 | 20 | 32 | 14 | 0,35 |
ШДА-ЗФ | 22,5 | 4 | 120 | 20 | 100 | 0,35 | |
ШДА-4А | 22,5 | 4 | 600 | 28 | 50 | 14 | 0,55 |
ЩДА-5А | 22,5 | 4 | 1000 | 48 | 50 | 14 | 0,8 |
ШДА-6А | 22,5 | 4 | 1600 | 97 | 50 | 14 | 1. |
ШДМ-2Ф | 22,5 | 4 | 100 | 1,7 | 220 | 27 | 0,32 1,65 |
ШДМ-7Ф | 22,5 | 4 | 1600 | 80 | 60 | 27 | |
ШД- 10I 10О | 15 | 4 | 10 | 5 | 100 | 14 | 0,08 |
ШД-1С | 15 | 4 | 40 | 14 | 100 | 27 | 0,14 |
ШД-1Б | 15 |
| 40 | 14 | 200 | 25 | 0. |
ШД-1ЕМ | 15 | 4 | 40 | 3 | 250 | 14 | 0.20 |
ШД-1А | 15 |
| 120 | 45 | 150 | 25 | 0,46 |
ШД-ЗС | 15 | 4 | 250 | 100 | 100 | 24 | 0,6 |
ЦЩА-2-1 | 15 | 2 | 10 |
| 400 | 27 | 0,14 |
ШДА-2-2 | 15 | 2 | 40 |
| 350 | 27 | 0,28 |
ШДА-2-3 | 15 | 2 | 100 |
| 320 | 27 | 0,55 |
ЩДА-2-4 | 15 | 2 | 400 |
| 300 | 27 | 1,0 |
ШДА-2-5 | 15 | 2 | 600 |
| 250 | 27 | 2,0 |
ШДА-2-6 | 18 | 2 | 1000 |
| 200 | 27 | 3,15 |
ШДА-3-1 | 15 | 3 | 10 |
| 500 | 27 | 0,14 |
ШДА-3-2 | 15 | 3 | 40 |
| 450 | 27 | 0,28 |
ШДА-3-3 | 15 | 3 | 100 | — | 350 | 27 | 0,55 |
ШДА-3-4 | 15 | 3 | 400 |
| 150 | 27 | 1,0 |
ШДА-З-Б | 15 | 3 | 600 |
| 150 | 27 | 2,0 |
ШДА-3-6 | 15 | 3 | 1000 | — | 100 | 27 | 3,5 |
Ш-22,5/0,1 | 22,5 | 4 | 100 | 0,4 | 500 | 48 | 0. |
Ш-22,5/0,25 | 22,5 | 4 | 250 | 1,7 | 500 | 48 | 0,67 |
Ш-22,5/0,6 | 22,5 | 4 | 600 | 15 | 350 | 48 | 1,7 |
Ш-22,5/1,6 | 22,5 | 4 | 1600 | 68 | 250 | 48 | 3.0 |
Ш-22,5/4 | 22,5 | 4 | 4000 | 210 | 240 | 48 | 4,2 |
Ш-22. | 22,5 | 4 | 10000 | 710 | 120 | 48 | 10,0 |
 025А
025А 4А
4А 1
1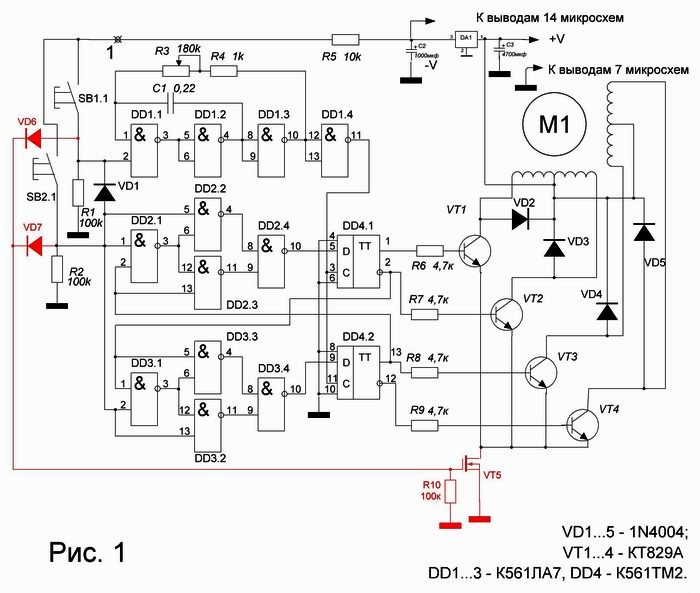 12Е
12Е 49
49 5/10
5/10Ротор шагового двигателя с постоянными магнитами изготовляется обычно из сплавов ЮН15ДК25БА или ЮНДК35Т5 в виде «звездочек», как это показано на рис. 2. При этом ротор может быть или монолитным (рис. 2, а), или составным (рис. 2, б). Во втором случае магниты устанавливаются на специальную втулку или непосредственно на вал, которые выполняются из магнитомягкого материала.
Для этих двигателей практическое применение нашла также двухпакетная конструкция. Она предусматривает размещение в одном корпусе двигателя двух сердечников статора и двух «звездочек» ротора. Оси полюсов обоих роторов совпадают, а полюсы сердечников статора сдвинуты относительно друг друга на половину одного зубцового деления, чем достигается пространственный сдвиг магнитных полей статорных обмоток. Такая конструкция, позволяющая уменьшить шаг ротора и увеличить быстродействие двигателя, является целесообразной при создании мощных (силовых) шаговых двигателей.
Такая конструкция, позволяющая уменьшить шаг ротора и увеличить быстродействие двигателя, является целесообразной при создании мощных (силовых) шаговых двигателей.
Желание уменьшить электромагнитную и механическую инерцию шаговых двигателей, что позволяет улучшить их динамические характеристики, привело к созданию двигателей с малоинерционными роторами — полыми цилиндрическими и дисковыми, имеющими на роторе печатную обмотку. По конструкции эти двигатели аналогичны двигателям непрерывного вращения и обладают такими же отличительными свойствами. Одна из конструктивных схем шагового двигателя этого типа приведена на рис. 3. Печатная обмотка управления находится на полом цилиндрическом роторе 1 (такая конструкция двигателя часто называется обращенной). Токоподвод к роторной обмотке осуществляется через контактные кольца 2, укрепленные на валу двигателя. Полый ротор находится в зазоре между внешним статором 3, на котором располагается обмотка возбуждения 4, и внутренним статором 5, который является частью магнитопровода.
Рис. 2. Ротор шагового двигателя.
а — монолитный; б — составной.
Рис. 3. Малоинерционный шаговый двигатель.
Практическое распространение получила также конструкция шагового двигателя с дисковым (торцевым) ротором с печатными обмотками.
Шаговые двигатели с пассивным ротором. Специфической особенностью шаговых двигателей с активным ротором является, как уже отмечалось выше, относительно большой шаг ротора. Это требует в большинстве случаев применения механических передач (редукторов), понижающих (редуцирующих) шаг и соответственно скорость входного вала производственного механизма, что усложняет шаговый привод, снижает его надежность, повышает массу, габариты и уровень шума. Стремление найти конструкцию шагового двигателя с небольшим шагом ротора привело к появлению двигателей с пассивным ротором. Эти двигатели делятся на реактивные и индукторные.
Рис. 4. Принцип работы реактивного шагового двигателя.
Рассмотрим вначале работу реактивного шагового двигателя, одна из возможных конструктивных схем которого показана на рис. 4,а.
4,а.
Статор и ротор двигателя, набранные из листов электротехнической стали, имеют явно выраженные полюсы, которые в теории шагового привода принято обычно называть зубцами. На зубцах статора располагаются обмотки, которые, как обычно, получают питание от коммутатора напряжения. Ротор двигателя, выполненный из ферромагнитного материала, не имеет обмотки возбуждения, в силу чего он и получил название пассивного.
Отличительной особенностью конструкции реактивного двигателя является неравенство количества зубцов статора Zc и ротора Zp, причем обычно ротор имеет больше зубцов, чем статор. Так, изображенный на рис. 4,а Двигатель имеет 6 зубцов на статоре и 8 зубцов на роторе. При этом важно отметить, что зубцы ротора соосны с зубцами одной пары диаметрально противоположных зубцов статора.
Предположим теперь, что в исходном положении, соответствующем приведенному на рис. 4,а, подано напряжение на обмотку управления пары полюсов 1—1 статора и образовалось магнитное поле с полюсами N—S.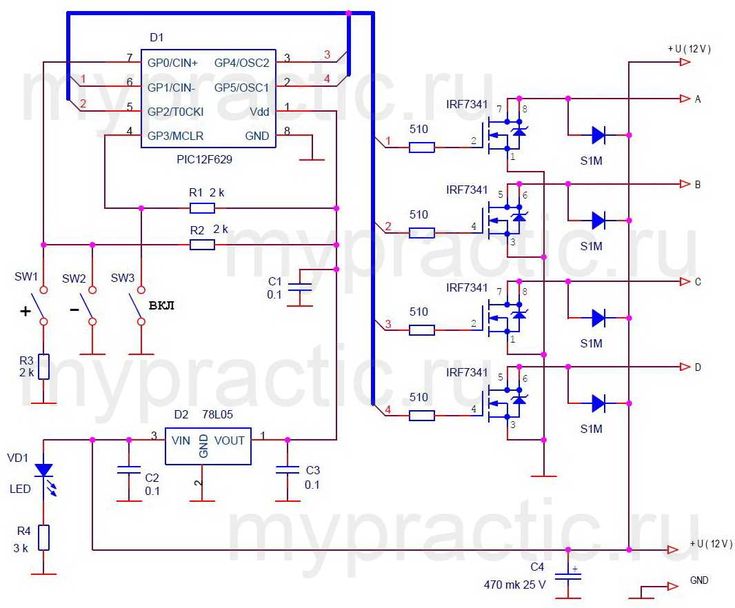 Тогда при изображенном на рис. 4,а положении ротора, при котором ось намагниченных зубцов статора /—/ совпадает с осью зубцов ротора 1—1, последний находится в положении устойчивого равновесия, поскольку магнитные силовые линии проходят по пути наименьшего сопротивления и не деформируются.
Тогда при изображенном на рис. 4,а положении ротора, при котором ось намагниченных зубцов статора /—/ совпадает с осью зубцов ротора 1—1, последний находится в положении устойчивого равновесия, поскольку магнитные силовые линии проходят по пути наименьшего сопротивления и не деформируются.
Снимем теперь напряжение с первой обмотки и подадим на вторую. Это переключение вызовет намагничивание зубцов статора II—II и поворот оси магнитного 360° поля на угол g— =60°, как это показано на рис. 4,6.
Ось магнитного поля уже не совпадает ни с одной осью зубцов ротора, силовые линии магнитного поля деформируются, и на ротор начинает действовать синхронизирующий момент, стремящийся повернуть его в согласованное равновесное положение по кратчайшему пути. Это новое равновесное положение будет соответствовать изображенному на рис. 4,6, когда ось зубцов ротора 2—2 будет совпадать с осью зубцов статора //—II.
При следующем переключении обмоток — отключении второй и подключении третьей обмотки — намагнитятся зубцы статора III—III и ротор вновь повернется уже до совпадения оси зубцов ротора 3—3 с осью зубцов статора III—III.
Из рис. 4,а нетрудно определить, что при каждом переключении обмоток статора ротор совершает поворот (шаг) на угол ар, равный:
Р В общем виде эта формула имеет вид:
где Тс, тр — соответственно полюсные деления статора и ротора.
Уменьшая разность чисел зубцов Zc и Zp, можно снижать шаг ротора до весьма малых значений. Практически разность Zp—Zc выбирают обязательно четной, что улучшает использование двигателя.
Одновременно с уменьшением углового шага ротора снижается и частота его вращения. Действительно, если
360°
поле статора поворачивается на угол , а ротор
360* (Zp — Zc)
за то же время на угол а — —7 , то частота вращения ротора п. будет меньше частоты вращения статора, для рассмотренного примера это отношение будет равно
Более распространенная конструкция реактивного шагового двигателя показана на рис. 4,в. Каждый полюс статора имеет три зубца, такие же зубцы расположены по всей поверхности ротора. Зубцы ротора соосны, как и в конструкции рис. 4,а, с зубцами статора одной диаметрально противоположной пары и смещены относительно зубцов двух других пар на треть зубцового деления. В этом случае при переключении обмоток статора ротор будет поворачиваться на 1/3 зубцового деления до совпадения зубцов ротора с зубцами вновь возбужденной пары полюсов статора.
Зубцы ротора соосны, как и в конструкции рис. 4,а, с зубцами статора одной диаметрально противоположной пары и смещены относительно зубцов двух других пар на треть зубцового деления. В этом случае при переключении обмоток статора ротор будет поворачиваться на 1/3 зубцового деления до совпадения зубцов ротора с зубцами вновь возбужденной пары полюсов статора.
При изготовлении ротора с большим числом зубцов Zр можно получить небольшое зубцовое деление ротора и соответственно малый шаг ротора, составляющий в реальных конструкциях доли градуса. В общем случае смещение осей зубцов ротора и статора производится на угол S6G°/mZp, а единичный шаг ротора составляет:
где п — количество тактов в цикле; т — число фаз.
Реактивные шаговые двигатели при всей своей простоте и технологичности конструкции, малых значениях шага и частоты вращения ротора обладают одним существенным недостатком: синхронизирующий момент
этих двигателей, а тем самым и их мощность невелики, что ограничивает области их применения
Этого недостатка в значительной мере лишены индукторные шаговые двигатели, в которых для увеличения синхронизирующего момента используется дополнительное подмагничивание ротора постоянным магнитным потоком со стороны статора. Одна из конструктивных схем двигателя этого типа изображена на рис. 5.
Одна из конструктивных схем двигателя этого типа изображена на рис. 5.
Особенность двигателя заключается в наличии кольцевого постоянного магнита I, расположенного на одном из торцов двигателя. Этот магнит создает постоянный по направлению магнитный поток, который, проходя в осевом направлении по ротору и в радиальном направлении через воздушный зазор, имеет вследствие зубчатой поверхности ротора 2 более высокое значение индукции в зубцах ротора, нежели во впадинах. Другими словами, силовые линии постоянного магнита N—S концентрируются в зубцах ротора и поэтому эти зубцы можно рассматривать как своего рода полюсы постоянного магнита. Индукторные двигатели имеют по сравнению с реактивными повышенный синхронизирующий момент и улучшенные энергетические и динамические свойства, занимая по этим показателям среднее положение между двигателями с активным и реактивным роторами.
Помимо возбуждения от постоянных магнитов, индукторные шаговые двигатели могут иметь независимое электромагнитное возбуждение или выполняться с самовозбуждением.
Отечественная электропромышленность выпускает несколько серий шаговых двигателей с пассивным ротором. Технические данные некоторых из них приведены в табл. 3.
Как видно из приведенных таблиц, шаговые двигатели с пассивным ротором имеют по сравнению с двигателями с активным ротором более мелкий единичный шаг и большую частоту приемистости.
Рис. 5. Индукторный шаговый двигатель.
Развитие шагового электропривода и его широкое распространение привели к созданию специальных видов шаговых двигателей — линейных, волновых и с катящимся ротором.
Таблица 3
Эти двигатели имеют те же специфические особенности, что и рассмотренные ниже двигатели непрерывного вращательного движения, отличаясь от них дискретностью перемещения ротора.
Двигатель с катящимся (эксцентрическим) ротором имеет тот же принцип действия, что и синхронный двигатель с катящимся ротором, но отличается от него фиксированным значением эксцентриситета ротора. К достоинствам шаговых двигателей с эксцентрическим ротором относится возможность получения весьма малых значений шага и низких частот вращения при значительном моменте и малой инерционности. При этом двигатели характеризуются небольшой массой и относительно высокими энергетическими показателями работы.
При этом двигатели характеризуются небольшой массой и относительно высокими энергетическими показателями работы.
Примерно такими же показателями обладают шаговые двигатели с гибкими волновыми передачами. Такие передачи имеют незначительный люфт и высокий коэффициент полезного действия, что позволяет применить их в весьма точных устройствах.
Для получения линейных дискретных перемещений рабочих органов применяются линейные шаговые двигатели.
- Назад
- Вперёд
- Вы здесь:
- Главная
- Оборудование
- Эл. машины
- Ремонт электродвигателей А4 и АН32
Еще по теме:
- Испытания по определению электрических величин электрических машин
- Основные повреждения электродвигателей
- Двигатели типа ДАБ
- Методы сушки электрических машин
- Автоматизация испытаний электрических машин
2.
 Структурная схема контурной системы управления с шаговым приводом
Структурная схема контурной системы управления с шаговым приводом
Рис. Структурная схема контурной
системы управления с шаговым приводом
На вход шаговых двигателей поступают
электрические импульсы, вызывающие
повороты ротора.
Каждому импульсу на входе соответствует
определённый угол поворота ротора на
выходе, а частота следования импульсов
задает скорость вращения ротора шагового
двигателя. Эти двигатели выпускают с
шагом на валу в градусах: 1;
1,5; 3;
4; 5;
6.
Зависимость между шагом на валу и
разрешающей способностью системы
выражается соотношением:
,
где tn– шаг винта подачи.
Чтобы реализовать по каждой оси координат
требуемый закон перемещения, нужно
обеспечить определенный порядок
чередования импульсов. Если суммировать
величину перемещения по двум координатам
можно получить на плоскости любую
криволинейную траекторию. Технологические
Технологические
команды и размерная информация и
записываются на программоносителе.
Шаговые двигатели являются в основном
маломощными, поэтому для передачи
больших моментов применяют гидроусилители
крутящего момента.
3. Схема позиционной двухкоординатной системы управления станками
Рис. Структурная схема позиционной
двухкоординатной
Системы управления станками
Обратные связи обеспечиваются датчиками,
в которых имеются кодовые шкалы. Шкала
имеет участки двух разных качеств,
одному из которых присваивается значение
«1», а другому «0».
Состояние каждого элемента однозначно
определяется тем участком шкалы, с
которым данный элемент взаимодействует.
Состояние каждого считывающего элемента
однозначно определяется тем участком,
которому он соответствует. Каждому
дискретному значению датчика соответствует
своя кодовая комбинация. Шкала имеет
10 уровней квантования (или формирует
10 комбинаций).
Исходная информация записывается на
перфоленту. После считывания она
поступает в устройство управления (УУ).
Пусть требуется переместить исполнительный
орган (ИО), в определенном направлении,
на определенную величину:
устройство
управления выдаёт сигнал;посредством
привода начинают движение салазки
продольной подачи;устройство
обратной связи измеряет фактическое
положение салазок и информацию об этом
посылает в устройство управления.
Когда будет отработано перемещение,
заданное программой, произойдёт
совпадение кодовых комбинаций.
Исполнительный механизм остановится.
Произойдёт смена кадра и будет
отрабатываться новое перемещение.
4. Схема системы управления со следящим приводом (контурная)
Эта система является контурной.
В качестве приводов используются
асинхронные двигатели с фазным ротором.
В цепи обратных связей включены различные
датчики, а именно вращающиеся трансформаторы
(ВТ),
вращающиеся индуктосины, линейные
индуктосины, опто-электронные
преобразователи.
Линейный индуктосин представляет
собой развернутый трансформатор,
сосотоящий из двух частей: линейки и
головки, в которых расположены линейные
обмотки со смещенным шагом.
Датчики обратных связей
устанавливаются на винтах и конечных
звеньях рабочих органов. Информация
от датчиков обрабатывается измерительными
устройствами и в виде сигналов обратной
связи поступает в устройство ЧПУ, в
котором сравнивается с заданной
прграммой.
Схема
устройства ЧПУ с программоносителем
в виде перфоленты
Устройство ЧПУ работает следующим
образом:
Перфолента 1, с записанной на ней
информацией на 8 дорожках устанавливается
в фотоэлектрическое считывающее
устройство (ФСУ). В процессе работы
перфолента протягивается на величину
1 кадра, и с неё считывается вся информация
со скоростью 200-300 строк в секунду. После
После
считывания информация передаётся вБЗУ(блок запоминающего устройства) строкой
считывания, где она заполняется в
соответствующих регистрах, количество
которых равно количеству строк в кадре.
После считывания всей информации
командойКВК(конец ввода кадра)ФСУостанавливается, и даётся команда на
передачу информации из регистровБЗУв интерполятор (И). Сигналы с выходов
интерполятора, в виде импульсов унитарного
кода передаются вЭФП(электронный
фазовый преобразователь), в котором
преобразуются в скачкообразное изменение
фазы переменного тока, которая затем
обрабатывается фазовым следящим
устройством (т.е. сигналы преобразуются
в смещение фазы). Сигналы с выходаЭФПв виде опорногоОСи рабочих
синусоидальных импульсовРСхиРСу,
подаются через соответствующие усилителиУсх, Усу и Усона фазовые приводы
подачиППхиППу.
Опорный
сигнал (ОС) формируется генератором
импульсов (ГИ).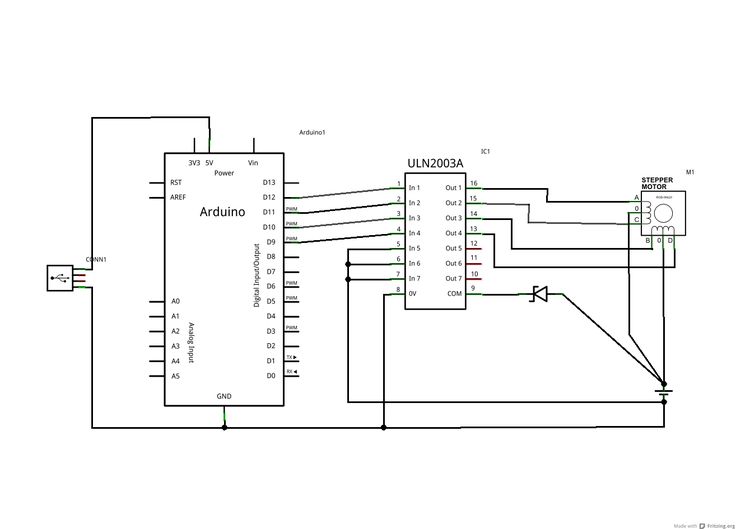
Шаговые двигатели / Статьи и обзоры / Элек.ру
Устройство и принцип работы
Шаговые двигатели широко используются в бытовых приборах, транспортных средствах, фрезерных и шлифовальных станках и других производственных механизмах.
Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов (это обеспечивается благодаря контроллеру). Главное его отличие от моторов других типов – отсутствие щеточного механизма.
Шаговый двигатель оснащен блоком управления (приборной панелью), передатчиками и сигнализаторами.
Из чего состоит шаговый двигатель
Как работает шаговый электродвигатель?
Зная принцип работы шагового двигателя, вы сможете самостоятельно установить его или произвести ремонт. Он функционирует следующим образом:
- После подачи напряжения на клеммы начинается непрерывное вращение специальных щеток. Входные импульсы устанавливают ведущий вал в положение, которое заранее определено.
- Под воздействием импульсов вал перемещается под фиксированным углом.
- Внешняя цепь управления, чаще всего представленная микроконтроллером, возбуждает электромагниты зубчатого типа. Один из них (тот, к которому приложена энергия) притягивает к себе зубья шестерни, вследствие чего вал движка делает поворот.
- Будучи выровнены по отношению к ведущему электромагниту, остальные магниты смещаются по направлению к следующей магнитной детали.
- Вращение шестеренки обеспечивается отключением первого электромагнита и включением следующего.
- Шестеренка выравнивается по отношению к предыдущему колесу, после чего весь процесс повторяется столько раз, сколько необходимо.

Данные вращения являются постоянным шагом. Для определения скорости мотора нужно подсчитать количество шагов, требуемых для его полного оборота. Точность работы обеспечивается благодаря микропроцессорным системам управления шаговых двигателей.
Характеристики
Шаговый двигатель с точки зрения механики и электротехники очень сложное устройство, имеющее много механических и электрических параметров. Приведу расшифровку основных технических параметров, которые используются на практике:
Приведу расшифровку основных технических параметров, которые используются на практике:
- Количество полных шагов за один оборот. Основной параметр двигателя, определяющий его точность, разрешающую способность, плавность движения. На двигателях серии FL57 этот параметр составляет 200 и 400 шагов на оборот.
- Угол полного шага. Представление в другом виде предыдущего параметра. Показывает на какой угол повернется вал при одном полном шаге. Может быть подсчитан как 360° / количество полных шагов за оборот. Для двигателей серии FL57 составляет 1,8 ° и 0,9°.
- Номинальный ток. Основной электрический параметр. Наибольший допустимый ток, при котором электродвигатель может работать сколь угодно длительное время. Для этого тока указаны механические параметры двигателя.
- Номинальное напряжение. Допустимое постоянное напряжение на обмотке двигателя в статическом режиме. Часто этот параметр не приводится. Вычисляется по закону Ома через номинальный ток и сопротивление обмотки.
- Сопротивление обмотки фазы. Сопротивление обмотки двигателя на постоянном токе. Параметр вместе с номинальным током, показывает какое напряжение можно подавать на обмотку двигателя.
- Индуктивность фазы. Параметр становится важным на значительных скоростях вращения. От него зависит скорость нарастания тока в обмотке. При высоких частотах переключения фаз приходится увеличивать напряжение, чтобы ток нарастал быстрее.
- Крутящий момент. Основной механический параметр. Показывает максимальный крутящий момент, который способен создать двигатель. Иногда приводится механическая характеристика в виде зависимости крутящего момента от частоты вращения.
- Момент инерции ротора. Характеризует механическую инерционность ротора двигателя. Чем этот параметр меньше, тем двигатель быстрее разгоняется.
- Удерживающий момент. Это крутящий момент при остановленном двигателе. При этом у двигателя должны быть запитаны две фазы номинальным током.
- Стопорный момент. Момент, необходимый чтобы провернуть вал двигателя при отсутствующем напряжении питания.
- Сопротивление изоляции. Как у всех электрических приборов – сопротивление между корпусом и обмотками.
- Пробивное напряжение. Минимальное напряжение, при котором происходит пробой изоляции между обмотками и корпусом. Параметр из раздела электробезопасности.


Основные критерии выбора шагового двигателя для ЧПУ
При выборе шагового двигателя для ЧПУ необходимо учитывать следующие параметры:
- Зависимость крутящего момента от скорости. Оценка графика позволит выбрать оптимальную модель двигателя для реализации конкретных задач;
- Индуктивность. Для расчета нужно выделить квадратный корень из индуктивности обмотки. Полученное значение умножается на 32. Результат не должен сильно отличаться от напряжения источника питания для драйвера. Если показатель напряжения питания выше результата расчета более чем на 30%, то мотор будет перегреваться и шуметь в процессе работы. При слишком низком показателе напряжения относительно результата расчета крутящий момент будет убывать с большой скоростью. Чтобы обеспечить больший крутящий момент, нужна высокая индуктивность, но в таком случае не обойтись без драйвера с высоким напряжением питания;
- Геометрические данные. Большое значение имеет диаметр вала, фланец и длина двигателя.
 Чтобы обеспечить больший крутящий момент, нужна высокая индуктивность, но в таком случае не обойтись без драйвера с высоким напряжением питания;
Чтобы обеспечить больший крутящий момент, нужна высокая индуктивность, но в таком случае не обойтись без драйвера с высоким напряжением питания;При выборе двигателя ЧПУ обязательно следует обратить внимание на момент инерции ротора, номинальное значение тока в фазе, омическое сопротивление фаз, максимальный показатель статистического синхронизирующего момента.
Типы шаговых двигателей
Основные виды шаговых двигателей:
• с переменным магнитным сопротивлением
• с постоянными магнитами
• гибридные.
Шаговые двигатели с переменным магнитным сопротивлением
У двигателей с переменным магнитным сопротивлением в роторе нет постоянных магнитов. Их ротор выполнен из магнитомягкого материала и имеет зубчатую форму. Магнитный поток замыкается через ближайшие к полюсам статора зубцы.
Будет интересно➡ Что такое трехфазный двигатель и как он работает
Зубцы притягиваются к полюсам. Этим и обеспечивается вращение. При тех же размерах, двигатели с переменным магнитным сопротивлением имеют меньший крутящий момент, чем другие типы шаговых двигателей. Применяются они довольно редко.
Этим и обеспечивается вращение. При тех же размерах, двигатели с переменным магнитным сопротивлением имеют меньший крутящий момент, чем другие типы шаговых двигателей. Применяются они довольно редко.
Двигатели с постоянными магнитами
У шаговых двигателей этого вида ротор содержит постоянные магниты. Общий принцип действия шагового двигателя идентичен двигателям с постоянным магнитом. Только в реальных двигателях магнитов больше. Вот пример двигателя с тремя парами полюсов ротора. У реальных двигателей с постоянными магнитами число шагов на оборот доходит до 48, что соответствует углу шага 7,5 °.
Гибридные двигатели
Гибридные двигатели обеспечивают меньшую величину шага, больший момент и скорость. Число шагов на оборот для такого типа двигателей доходит до 400 (угол шага 0,9°). При этом они более сложные в изготовлении и более дорогие. Я не хочу забивать читателю голову конструкцией этих двигателей. У них есть и зубчатый ротор, и постоянные магниты.
По принципу действия гибридные двигатели эквивалентны двигателям с постоянными магнитами, но с гораздо большим числом полюсов. Это самый распространенный тип шаговых двигателей.
Это самый распространенный тип шаговых двигателей.
УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ
Униполярные шаговые двигатели, так же как и биполярные, имеют две обмотки, и каждая из них имеет центральный отвод. В зависимости от требуемого направления магнитного поля, в работу включается соответствующая половина обмотки, что достигается простым переключением ключей и существенно упрощает схему драйвера.
Подобный механизм позволяет в качестве управляющей системы использовать простейший униполярный драйвер с четырьмя ключами.
Униполярный двухфазный шаговый двигатель имеет шесть выводов. Но так же бывает, что средние отводы катушек внутри соединены, что позволяет шаговому двигателю иметь только пять выводов.
Благодаря простоте в эксплуатации, данные двигатели имеют широкую популярность среди как новичков любителей, так и во многих промышленных отраслях, поскольку униполярный шаговый двигатель является самым примитивным и дешевым способом получить высокоточные угловые движения.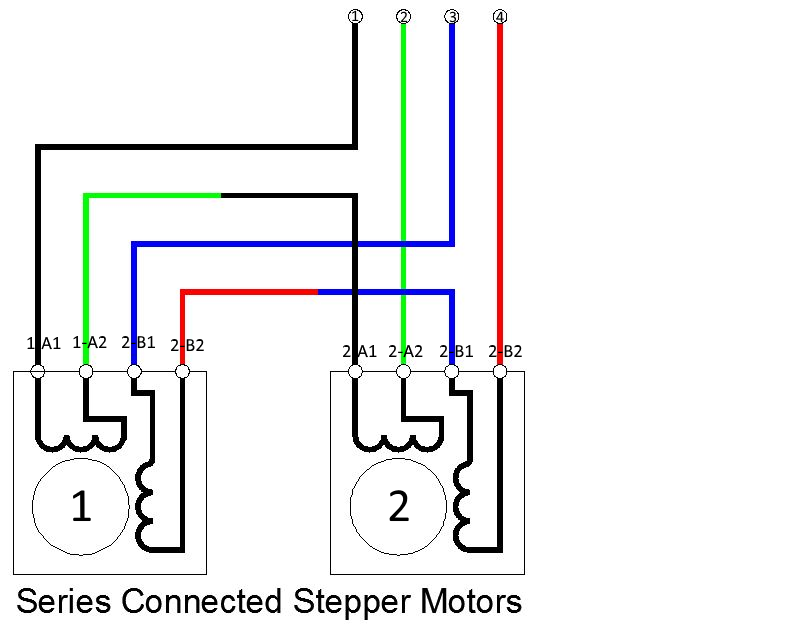
БИПОЛЯРНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
С биполярными шаговыми двигателями дело обстоит немного иначе. Данные двигатели имеют только одну обмотку в одной фазе. Управляющая схема биполярного двигателя должна быть намного сложнее, чтобы менять направление магнитного поля с целью изменить направление тока в обмотке. Этого можно достигнуть с помощью схемы H-bridge. К тому же, для упрощения задачи можно приобрести несколько драйверных чипов, которые вам помогут.
Биполярные шаговые двигатели, в отличие от униполярных имеют два вывода на одну фазу, ни один из которых не является общим. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
Униполярные шаговые двигатели, в отличие от биполярных, имеют два вывода за фазу, ни одна из которых не является общей. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
ЛИНЕЙНЫЕ ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ
С целью автоматизации некоторых производственных процессов на предприятии, иногда возникает необходимость перемещения объектов в плоскости. Чтобы это сделать, потребуется использовать специальный преобразователь вращательного движения в поступательное, что достигается путем применения кинематики.
При помощи линейных шаговых двигателей можно преобразовать импульсную команду прямо в линейное перемещение, что значительно упростит кинематическую схему всевозможных электрических приводов.
Принципиальная схема работы линейного шагового двигателя
Статор в данном приводе представлен в виде магнитомягкой плиты, а провода подмагничиваются путем работы постоянного магнита.
Зубцовые деления в статоре и подвижной части одинаковые, при этом они могут быть сдвинуты на половину деления в пределах одного провода ротора. Поток подмагничивания и его магнитное сопротивление, в данном случае, не зависят от того, где находится подвижная часть двигателя.
Чтобы переместить объект в плоскости согласно двум координатам, применяют двигатели двухкоординатного типа.
Также в линейных двигателях используется магнитно-воздушная подвеска. Благодаря силе магнитного притяжения ротор притягивается к статору. Далее под ротор сквозь форсунки нагнетают воздух в сжатом виде, вследствие чего появляется сила, отталкивающая ротор от статора.
Так между ними возникает воздушная подушка и ротор висит над статором с наличием минимально зазора. Это и обеспечивает минимум сопротивления движения ротора и высокоточное позиционирование.
Вентильные шаговые двигатели
Главным отличием вентильных двигателей считают отсутствие тяжелых постоянных магнитов. Благодаря чему жесткой фиксации положения не происходит при наличии высокой точности. Двигатели идеальны для просмотра слайдов кинопленки. Относительно плавное, точное движение идеально подходит случаю.
Ротор облегченный, стальной, имеет ярко выраженные, сравнительно немногочисленные зубцы.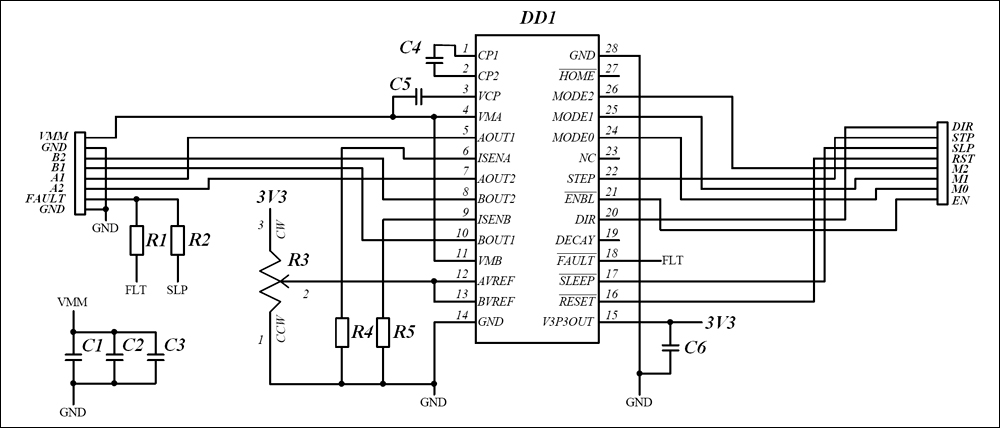 Шаг средний, например, для трех фаз, 12 полюсов выйдет 15 градусов. Расстояние меж полюсами составляет 30 градусов. Промежуточные положения вал занимает в случаях, когда активируются одновременно две соседние фазы. Чередование соответствует обычной промышленной сети (к примеру, 400 вольт).
Шаг средний, например, для трех фаз, 12 полюсов выйдет 15 градусов. Расстояние меж полюсами составляет 30 градусов. Промежуточные положения вал занимает в случаях, когда активируются одновременно две соседние фазы. Чередование соответствует обычной промышленной сети (к примеру, 400 вольт).
Главной особенностью вентильных двигателей является сравнительно малое количество тупых зубцов. Высокой точности позиционирования ожидать не приходится. Для реализации продвинутых алгоритмов применяются сложные драйверы.
Подключение шаговых двигателей
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Будет интересно➡ Что такое асинхронный двигатель и принцип его действия
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.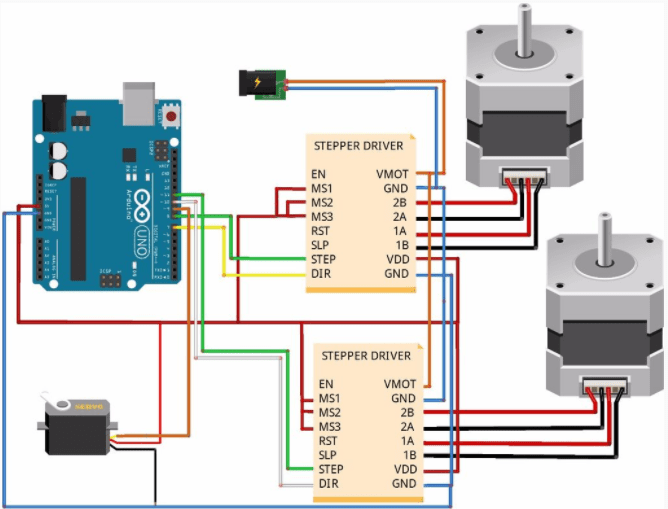
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам.
В первом случае используется один центр-кран каждой обмотки и один конец провода.
Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу.
Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.

Типичные схемы подключения ШД
Схема подключения 6-ти выводного шагового двигателя к драйверу GeckoDrive (биполярное последовательное подключение обмоток)
Схема подключения 8-ми выводного ШД с биполярным параллельным соединением обмоток к драйверу GeckoDrive
Схема подключения 8-ми выводного ШД с биполярным последовательным соединением обмоток к драйверу GeckoDrive
Управление шаговыми электродвигателями
Существуют три режима управления шаговым двигателем:
• полношаговый
• полушаговый
• микрошаговый.
Полношаговый режим управления
Первый способ был описан в примерах выше. Это попеременная коммутация фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза.
Способ называется на английском one phase on full step – одна фаза на полный шаг. Точки равновесия ротора совпадают с полюсами статора. Недостатком этого режима является то, что в один и тот же момент используется половина обмоток для биполярного двигателя, и только четверть для униполярного.
Есть вариант полношагового режима управления при котором в одно и то же время включены две фазы. Называется two-phase-on full step – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки.
полушаговый режим
Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага. Этот способ позволяет от двигателя получить в два раза больше шагов на оборот ротора.
Каждый второй шаг включается одна фаза, а между ними — включаются сразу две.
В результате такой коммутации угловое перемещение шага уменьшается в два раза, или в два раза увеличивается число шагов.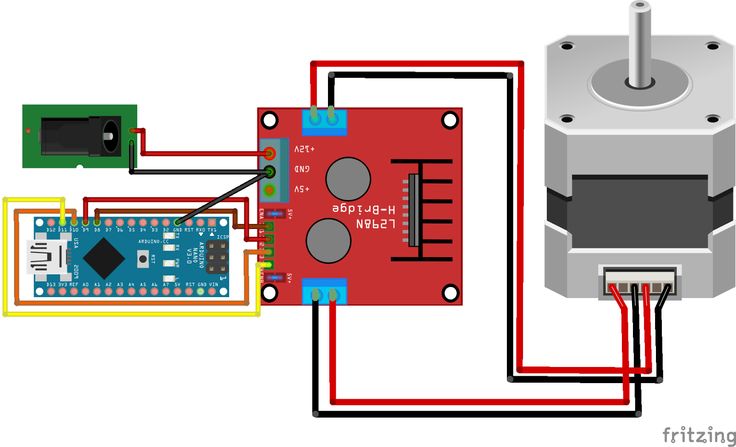 Полный момент получить в полушаговом режиме не удается.
Полный момент получить в полушаговом режиме не удается.
Не смотря на это, полушаговый режим используется часто. Уж очень простыми методами он удваивает число шагов двигателя.
Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий.
микрошаговый режми
Чтобы зафиксировать положение ротора, необходимо формировать в обмотках двигателя ток удержания. Этот ток может быть значительно меньше номинального.
Способность шагового двигателя фиксировать свое положение при остановке позволяет обходиться без механических фиксаторов, тормозных систем и т.п.
Управление безколлекторными шд
Для управления шаговым двигателем требуется контроллер. Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей.
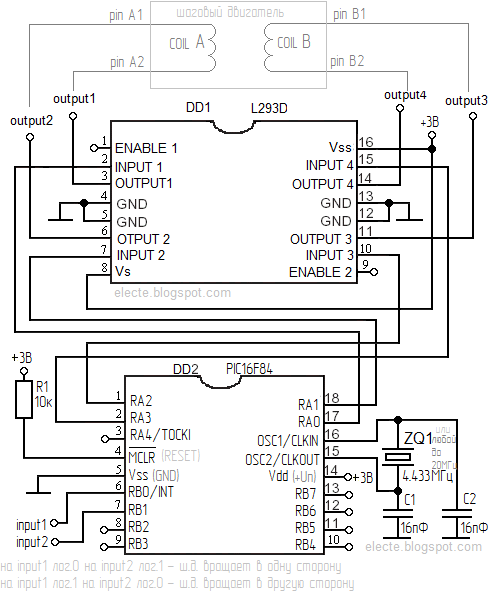 Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
Будет интересно➡ Однофазные асинхронные двигатели на службе человечества
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора.
Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Шаговые двигатели Лавета
Шаговые двигатели Лавета временами применяются электрическими часами. Сконструированы работать с сигналом одной фазы. Благодаря возможности миниатюризации двигатели Лавета послужат исполнительной частью наручных часов. Название устройства получили именем изобретателя – инженера Мариуса Лавета.
Инженер Мариус Лавет позавидует
В 1936 году выпускник Высшей школы электрики сконструировал двигатель, принесший всемирную известность. Статор выглядит, как у электрического мотора с расщепленными полюсами. Одна катушка. Полюсы образованы единичными витками сравнительно толстой медной проволоки, расположенными на магнитопроводе, создавая нужную фазу ЭДС. Индуцированные токи обеспечивают нужный крутящий момент. Задержка распространения магнитного поля по сердечнику используется сдвигать фазу на 90 градусов, имитируя двухфазное напряжение. Ротор представлен постоянным магнитом.
Конструкции охотно используются бытовой техникой (блендерами, миксерами). Отличие двигателей Лавета в том, что благодаря зубцам вал фиксируется с некоторым шагом. Становится возможным характерное движение секундной стрелки. Как большинство шаговых двигателей, разновидность не предназначена работать на реверс.
Отличие двигателей Лавета в том, что благодаря зубцам вал фиксируется с некоторым шагом. Становится возможным характерное движение секундной стрелки. Как большинство шаговых двигателей, разновидность не предназначена работать на реверс.
Контроллер управления шаговыми двигателями, сделанный своими руками
Задача проста: по готовой схеме и программе Павла Бахтинова с этого форума развести печатную плату, собрать и отладить контроллер управления шаговыми двигателями, установленными в монтировке астрономического телескопа. Далее, необходимо изготовить приличный корпус и пульт управления.
Все начинается с деталек (сразу вспоминается закон Мерфи: «Ни один талант не смог пережить страсти к деталькам» ):
Работа над схемой:
Разводим печатную плату:
Фотошаблон готов:
Тут надо сказать несколько слов о моем НОУ-ХАУ в изготовлении фотошаблонов для перевода рисунка на печатную плату.
Обычно я их печатаю на принтере — чаще на струйном, реже на лазерном, т.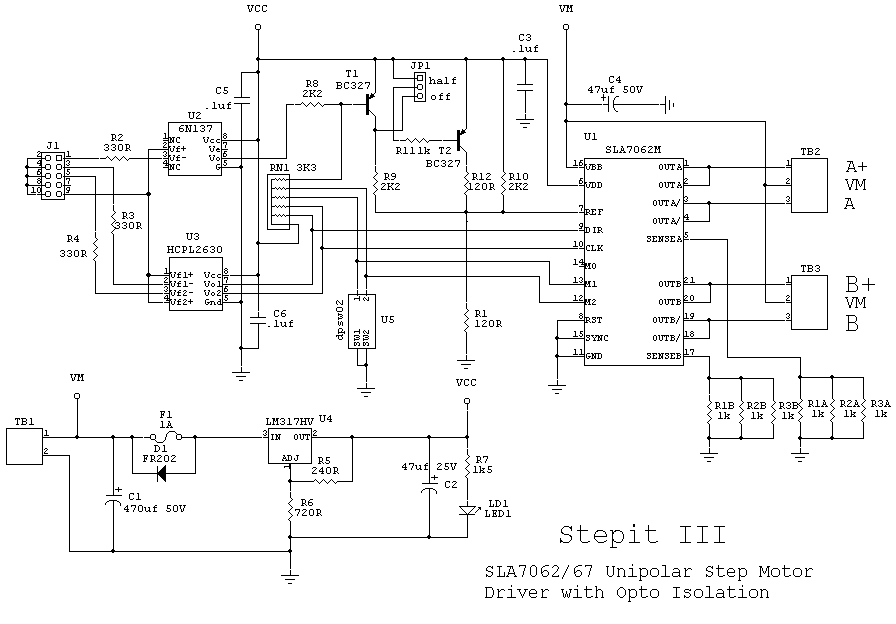 к. термопленка давала непредсказуемую усадку после термообработки в лазернике (а шаблоны необходимы для двух сторон), поэтому невозможно было совместить два шаблона с достаточной точностью (до 0,15 мм).
к. термопленка давала непредсказуемую усадку после термообработки в лазернике (а шаблоны необходимы для двух сторон), поэтому невозможно было совместить два шаблона с достаточной точностью (до 0,15 мм).
Струйный принтер хорошо повторяет размеры, но не достаточно плотно заполняет черным цветом дорожки, кое-где они все же просвечиваются. Решение этой проблемы было вскоре найдено: печатаем не чистым черным, а чуть светлее в сторону желтого — принтер начинает добавлять к черной краске желтую (непрозрачную для УФ излучения) и дорожки, хотя и выглядят более прозрачными, после перевода фотоспособом получаются более плотные, практически без изьянов.
Главное — подобрать экспозицию:
Идет процесс травления печатной платы:
Протравлена полностью:
Сверлим отверстия диаметром от 0.7мм до 1.5мм самодельным сверлильным станком:
Паяльник старенький да удаленький:
Забиваем плату деталями:
Все детали запаяны:
Обратная сторона платы, начался процесс отладки:
Вот так будем ставить нагревающиеся элементы (те, что выше на рисунке с этой стороны платы стоят — интегральный стабилизатор и две микросхемы — драйверы моторов) вот на такие красивые радиаторы:
В данное время началась работа над пультом.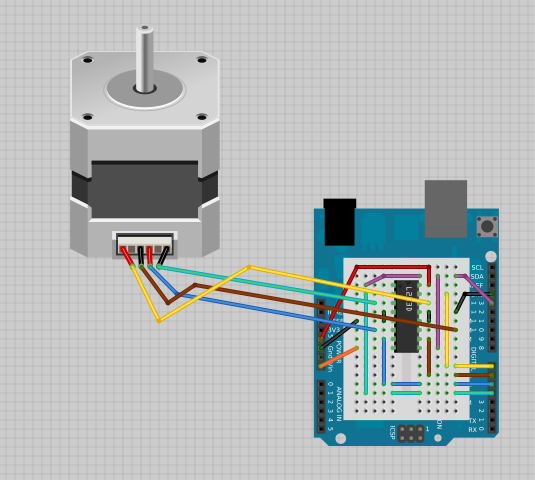 Главное в пульте управления, считаю — эргономика, насколько только это уместно применить к той коробочке, которая получится после сборки на отечественных БОЛЬШИХ, но надежных микрокнопках.
Главное в пульте управления, считаю — эргономика, насколько только это уместно применить к той коробочке, которая получится после сборки на отечественных БОЛЬШИХ, но надежных микрокнопках.
… И, так, после продолжительного перерыва снова продолжил работу над этим проектом.
Немного поигрался с разными вариантами дизайна пульта и, вот, к чему я пришел:
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т. к. изменение направления поля не влияет на положение ротора.
к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Недостатки и достоинства шаговых двигателей
Преимущества шаговых двигателей
• Точное позиционирование без обратной связи. Число импульсов определяет угол поворота.
• Двигатель обеспечивает полный крутящий момент при снижении скорости вращения, вплоть до остановки.
• Двигатель фиксирует свое положение при остановке за счет тока удержания.
• Регулировка скорости вращения с высокой точностью без обратной связи.
• Способность быстрого старта, остановки, реверса.
• Высокая надежность. Отсутствие коллекторных щеток. Недостатки шаговых двигателей.
• Сложная система управления.
• Невысокие скорости вращения.
• Возможно явление резонанса.
• Может произойти потеря позиционирования при механических перегрузках.
• Низкая удельная мощность.
Попробуем найти минусы
Как и всему на свете шаговому двигателю присущи определенные достоинства и недостатки.
Но есть области в точной механике, в которых он просто незаменим. Там где надо перемещать механические узлы, мгновенно останавливать, двигать назад, регулировать скорость… Попробуйте мгновенно остановить коллекторный двигатель, и вы забудете о недостатках шагового.
Попробуйте реализовать изменение скорости коллекторного двигателя в широких пределах. Проще поставить шаговый с его недостатками.
Заключение.
В завершении объемной статьи хочу выразить благодарность источникам, откуда мы черпали информацию:
https://robotosha.ru
https://chipok.ru
https://ru.wikipedia.org
Параметры шаговых двигателей
Отдельные параметры шаговых двигателей критичны при выборе соответствующего контроллера, формирующего управляющие напряжения:
- Индуктивность. Высокое значение параметра обычно у низкоскоростных двигателей с явным крутящим моментом. При повышении количества оборотов вала параметры оборудования непременно ухудшатся. При низкой индуктивности ток вызывает быстрый отклик, требуется в приводах для чтения оптических дисков.
- Потребляемый ток влияет на жесткость переключения меж соседними шагами. Более плавный режим требует снижения параметра. Большой потребляемый ток повышает крутящий момент. Таким образом, правильный выбор параметров загружает плечи проектировщика.
- Предельный уровень рабочих температур шаговых двигатель невелик. Верхняя граница находится в области 90 градусов Цельсия. Перегрев возможен на высоких крутящих моментах при значительном потреблении тока. Для разгрузки иногда применяется режим удержания, когда вал стопорится некоторое время.
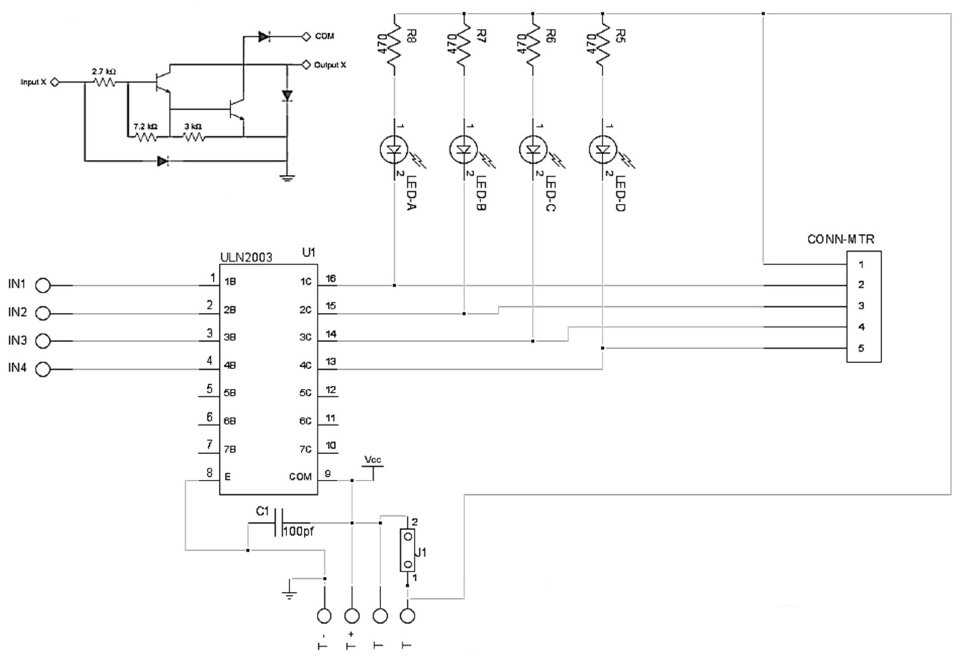 При повышении количества оборотов вала параметры оборудования непременно ухудшатся. При низкой индуктивности ток вызывает быстрый отклик, требуется в приводах для чтения оптических дисков.
При повышении количества оборотов вала параметры оборудования непременно ухудшатся. При низкой индуктивности ток вызывает быстрый отклик, требуется в приводах для чтения оптических дисков.Виды шаговых двигателей
Существует несколько разновидностей. К наиболее востребованным относятся модели с переменным магнитным сопротивлением, с постоянным магнитом и гибридные.
Устройства с переменным магнитным сопротивлением
Такие шаговые двигатели не имеют постоянных магнитов в роторе.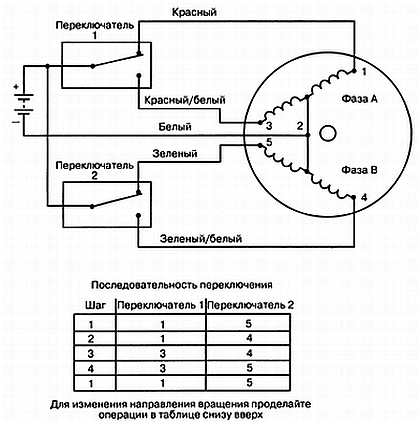 Для изготовления ротора зубчатой формы используется магнитомягкий материал. Его вращение обеспечивается за счет замыкания магнитного поля статора через зубцы, располагающиеся вблизи полюсов. Зубцы к полюсам притягиваются и ротор поворачивается. Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Для изготовления ротора зубчатой формы используется магнитомягкий материал. Его вращение обеспечивается за счет замыкания магнитного поля статора через зубцы, располагающиеся вблизи полюсов. Зубцы к полюсам притягиваются и ротор поворачивается. Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Устройства с постоянными магнитами
На примере такого устройства выше разъяснялся принцип работы шаговых двигателей. В реальности роторы таких двигателей имеют несколько постоянных магнитов. От их количества зависит число шагов, за которое ротор выполняет полный оборот. Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Гибридные устройства
В конструкции шаговых гибридных двигателей присутствует и зубчатый ротор, и постоянные магниты. Функционирует устройство по тому же принципу, что и двигатель с постоянными магнитами, но гибридный вариант отличается большим числом полюсов. За счет такого количества полюсов у гибридных шаговых двигателей больший момент, выше скорость и меньше величина шага. Максимальное число на один оборот может доходить до 400, при этом угол шага составляет 0,9 градусов. Гибридные устройства сложнее в изготовлении и дороже шаговых устройств других типов, но благодаря высокой функциональности пользуются спросом.
За счет такого количества полюсов у гибридных шаговых двигателей больший момент, выше скорость и меньше величина шага. Максимальное число на один оборот может доходить до 400, при этом угол шага составляет 0,9 градусов. Гибридные устройства сложнее в изготовлении и дороже шаговых устройств других типов, но благодаря высокой функциональности пользуются спросом.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
О шаговых двигателях и том, как их есть
Что такое шаговый двигатель для ЧПУ станка и для чего нужен?
Шаговый двигатель — это машина, преобразующая электрическую энергию (она поступает из электросети) в механическую. Происходит это благодаря выполнению дискретных перемещений ротора. После каждого действия динамической части ее положение фиксируется.
Все передвижения в отдельности имеют одинаковую величину и образуют полный оборот (цикл).
Какие шаговые двигатели нужны для ЧПУ-станка
Разновидность двигателя не менее важна, чем его технические характеристики. Каждый вид имеет свои особенности.
- Биполярные. Их чаще всего используют на станках с ЧПУ. Основное преимущество разновидности — возможность установить новый драйвер, если предыдущий вышел из строя. При этом даже на малых оборотах сохранится высокое удельное сопротивление.
- Трехфазные. Характеризуются высокой скоростью. Их выбирают в том случае, если важна именно скорость.
- Униполярные. Включают в себя несколько разновидностей биполярных. Двигатели отличаются друг от друга, а их подбор осуществляется в зависимости от вида обмотки.
 При этом даже на малых оборотах сохранится высокое удельное сопротивление.
При этом даже на малых оборотах сохранится высокое удельное сопротивление.Типы двигателей
Перед покупкой необходимо определиться с подходящей модификацией. Одними из самых распространенных являются следующие типы устройств:
- Биполярные. Считаются наиболее популярными моделями для ЧПУ. Отличаются высоким удельным сопротивлением на небольших оборотах. К тому же при поломке старого драйвера можно без проблем подобрать новый;
- Униполярные. Разновидность биполярных шаговых двигателей. В зависимости от исполнения подключение обмоток может быть разным;
- Трехфазные. Основное преимущества – большая скорость по сравнению с биполярными аналогами. Использование трехфазных двигателей оптимально в случаях, когда нужна высокая скорость вращения.
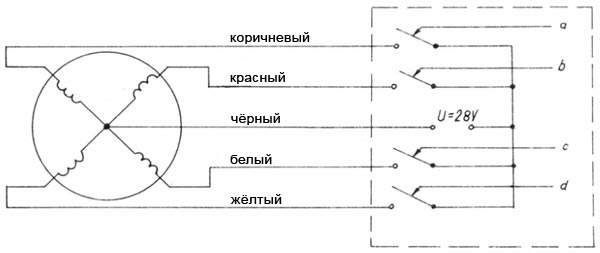
При выборе двигателя не лишним будет изучить характеристики готовых станков, близких по характеристикам к разрабатываемому оборудованию.
Как подобрать шаговый двигатель для создания ЧПУ-станка своими руками?
Подбор оптимального двигателя проводится на основании нескольких параметров.
Индуктивность
Первым делом вычисляют квадратный корень из индуктивности обмотки. Полученное число умножается на 32. Итоговое значение сравнивается с напряжением источника, который питает драйвер. Эти показатели не могут значительно отличаться друг от друга.
Мотор будет работать слишком громко и перегреваться в случае разницы более 30 %.
Высокая индуктивность помогает сохранить высокий крутящий момент. Для двигателя с высокой индуктивностью важно подобрать драйвер с большим напряжением. Только так мотор сможет полноценно работать.
Крутящий момент и скорость
Чтобы выбрать идеально подходящий мотор, нужно составить график скорости и крутящего момента (точнее, зависимости одного параметра от другого).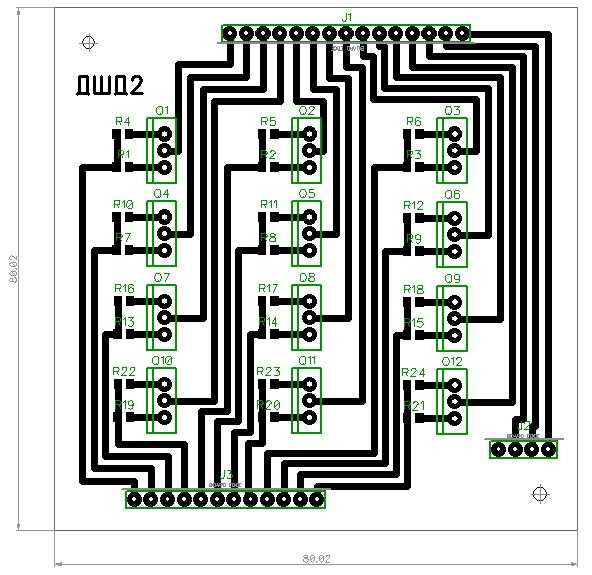 Готовый график показывает, соответствует ли выбранный мотор заданным техническим параметрам.
Готовый график показывает, соответствует ли выбранный мотор заданным техническим параметрам.
Геометрические параметры
Рекомендуется проанализировать следующие показатели:
- Момент инерции роторов.
- Номинальный ток внутри фазы.
- Максимальное число статического синхронизирующего момента.
- Общая характеристика сопротивления фаз омического типа.
ВАЖНО! При выборе двигателя особое внимание уделяется фланцу, диаметру вала и длине самого двигателя.
Шаговые двигатели
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Выбор контроллера для управления шаговым двигателем описан в статье Контроллеры ШД. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Выбор контроллера для управления шаговым двигателем описан в статье Контроллеры ШД. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит.
В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей:
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами
· гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками.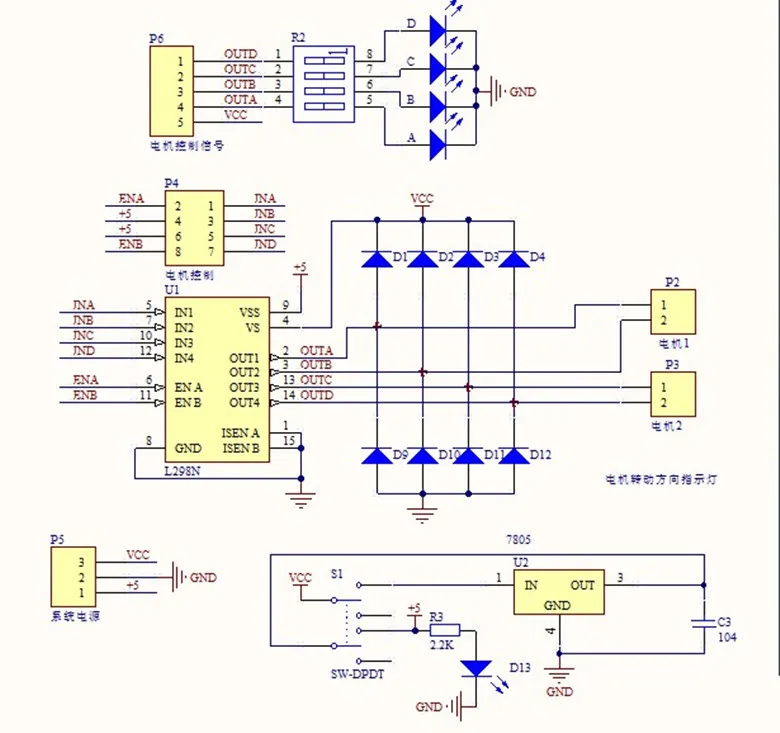 В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Биполярные и униполярные шаговые двигатели В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием.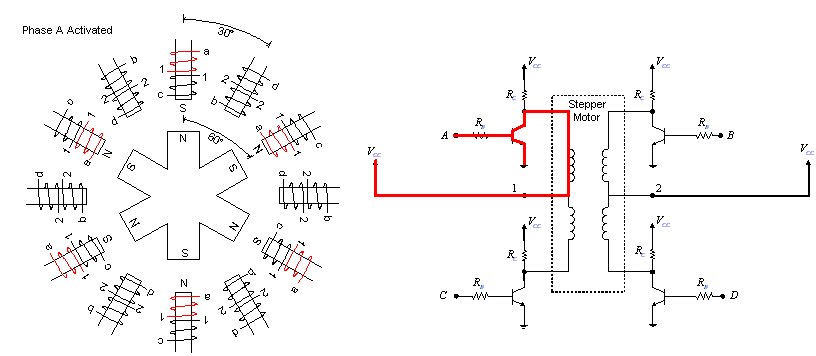 Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное.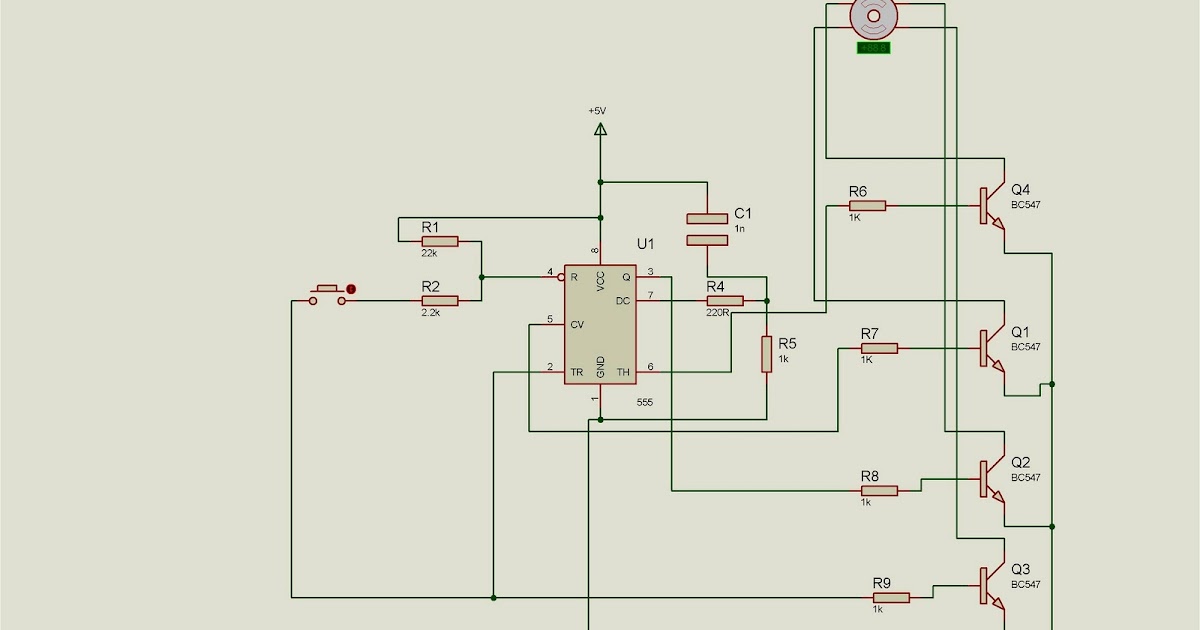 Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр. = Iуниполяр. / √2, т.е.
= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.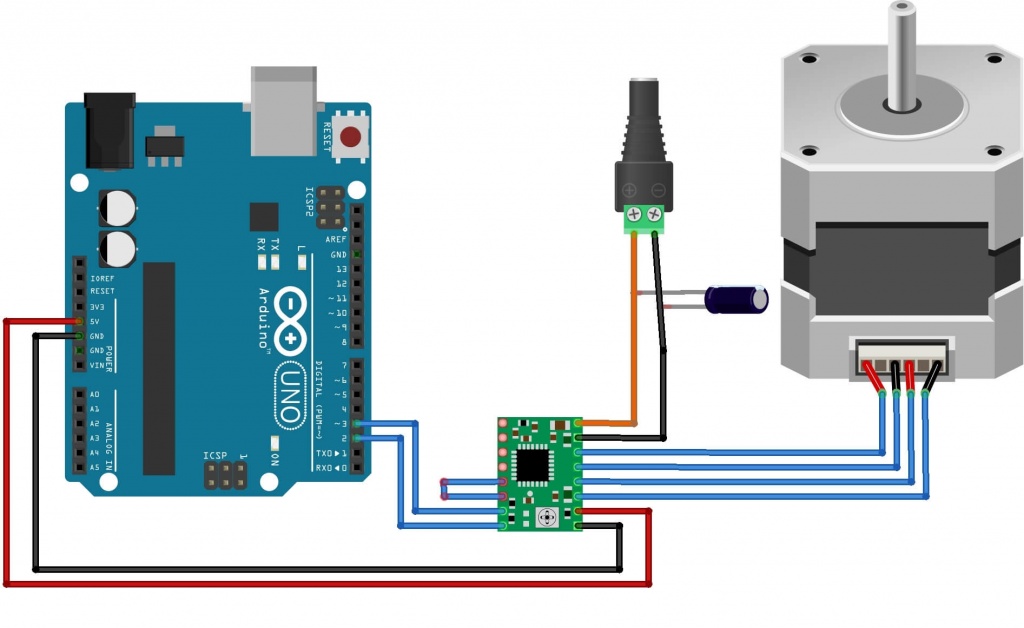 2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
При выборе шагового двигателя одной из важнейших характеристик является его скоростные качества, то есть зависимость момента на валу от скорости вращения. Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение R/L тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента. Объясняется это тем, что эквивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление, возникающая в цепи ЭДС самоиндукции препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи.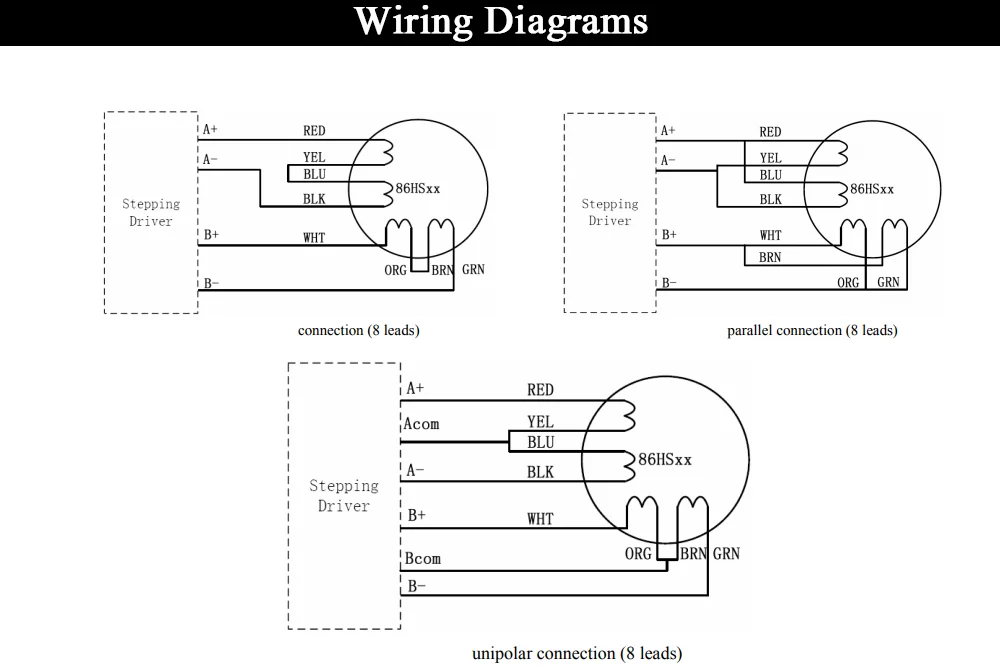 Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
Интернет магазин чпу станков хобби класса и комплектации
Расчет шаговых двигателей для ЧПУ
Определение силы
Чтобы определиться с выбором мотора, нужно просчитать его шаговые параметры. Например, определить силу трения (она зависит от тех материалов, которые используются при работе на станке). Для расчета силы трения коэффициент трения умножается на вес системы движения.
СПРАВКА! Для расчета инерции масса стола (она считается вместе с деталью) умножается на необходимый показатель ускорения.
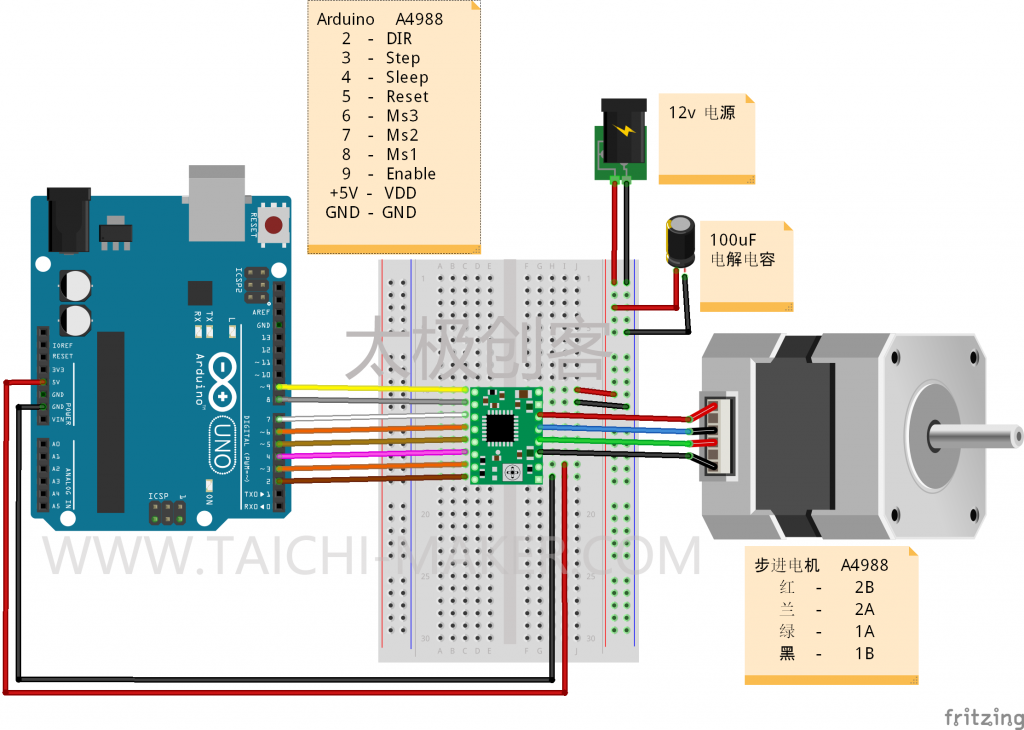
Полная сила сопротивления рассчитывается следующим образом: складываются силы резания, инерции и трения.
Расчет мощности
Мощность мотора рассчитывается по следующей формуле: F = ma. В данной формуле F — сила (ее измеряют в ньютонах), которая прикладывается для приведения объекта в движение; m — масса объекта, a — нужное ускорение.
Расчет редукции оборотов
Эта характеристика высчитывается исходя из начальных оборотов привода и максимального показателя скорости, при которой перемещается стол.
К примеру, скорость равна 2000 мм/мин, а шаг винта передачи — 20 мм. Тогда редукция оборотов будет равняться 100 (2000/20).
Типы шаговых двигателей
Основные виды шаговых двигателей:
• с переменным магнитным сопротивлением
• с постоянными магнитами
• гибридные.
Шаговые двигатели с переменным магнитным сопротивлением
У двигателей с переменным магнитным сопротивлением в роторе нет постоянных магнитов. Их ротор выполнен из магнитомягкого материала и имеет зубчатую форму. Магнитный поток замыкается через ближайшие к полюсам статора зубцы.
Их ротор выполнен из магнитомягкого материала и имеет зубчатую форму. Магнитный поток замыкается через ближайшие к полюсам статора зубцы.
Будет интересно➡ Что такое асинхронный двигатель и принцип его действия
Зубцы притягиваются к полюсам. Этим и обеспечивается вращение. При тех же размерах, двигатели с переменным магнитным сопротивлением имеют меньший крутящий момент, чем другие типы шаговых двигателей. Применяются они довольно редко.
Двигатели с постоянными магнитами
У шаговых двигателей этого вида ротор содержит постоянные магниты. Общий принцип действия шагового двигателя идентичен двигателям с постоянным магнитом. Только в реальных двигателях магнитов больше. Вот пример двигателя с тремя парами полюсов ротора. У реальных двигателей с постоянными магнитами число шагов на оборот доходит до 48, что соответствует углу шага 7,5 °.
Гибридные двигатели
Гибридные двигатели обеспечивают меньшую величину шага, больший момент и скорость. Число шагов на оборот для такого типа двигателей доходит до 400 (угол шага 0,9°). При этом они более сложные в изготовлении и более дорогие. Я не хочу забивать читателю голову конструкцией этих двигателей. У них есть и зубчатый ротор, и постоянные магниты.
При этом они более сложные в изготовлении и более дорогие. Я не хочу забивать читателю голову конструкцией этих двигателей. У них есть и зубчатый ротор, и постоянные магниты.
По принципу действия гибридные двигатели эквивалентны двигателям с постоянными магнитами, но с гораздо большим числом полюсов. Это самый распространенный тип шаговых двигателей.
УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ
Униполярные шаговые двигатели, так же как и биполярные, имеют две обмотки, и каждая из них имеет центральный отвод. В зависимости от требуемого направления магнитного поля, в работу включается соответствующая половина обмотки, что достигается простым переключением ключей и существенно упрощает схему драйвера.
Подобный механизм позволяет в качестве управляющей системы использовать простейший униполярный драйвер с четырьмя ключами.
Униполярный двухфазный шаговый двигатель имеет шесть выводов. Но так же бывает, что средние отводы катушек внутри соединены, что позволяет шаговому двигателю иметь только пять выводов.
Благодаря простоте в эксплуатации, данные двигатели имеют широкую популярность среди как новичков любителей, так и во многих промышленных отраслях, поскольку униполярный шаговый двигатель является самым примитивным и дешевым способом получить высокоточные угловые движения.
БИПОЛЯРНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
С биполярными шаговыми двигателями дело обстоит немного иначе. Данные двигатели имеют только одну обмотку в одной фазе. Управляющая схема биполярного двигателя должна быть намного сложнее, чтобы менять направление магнитного поля с целью изменить направление тока в обмотке. Этого можно достигнуть с помощью схемы H-bridge. К тому же, для упрощения задачи можно приобрести несколько драйверных чипов, которые вам помогут.
Биполярные шаговые двигатели, в отличие от униполярных имеют два вывода на одну фазу, ни один из которых не является общим. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.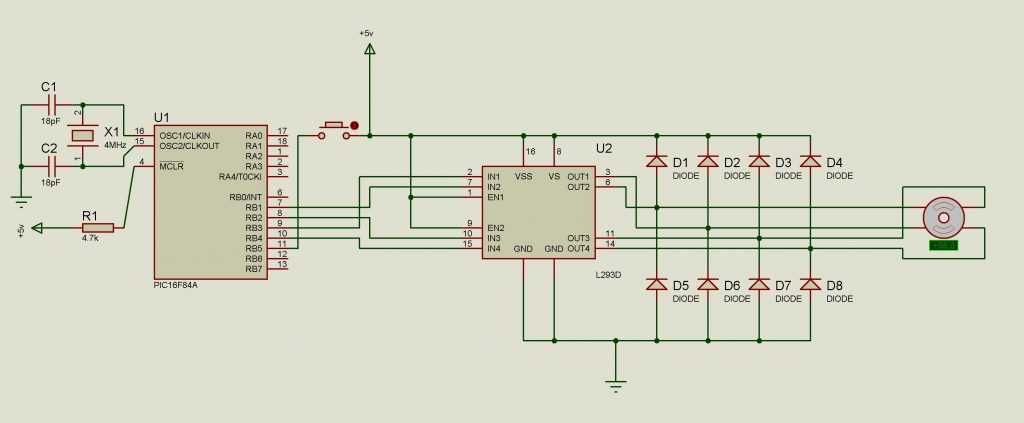
Униполярные шаговые двигатели, в отличие от биполярных, имеют два вывода за фазу, ни одна из которых не является общей. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
ЛИНЕЙНЫЕ ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ
С целью автоматизации некоторых производственных процессов на предприятии, иногда возникает необходимость перемещения объектов в плоскости. Чтобы это сделать, потребуется использовать специальный преобразователь вращательного движения в поступательное, что достигается путем применения кинематики.
При помощи линейных шаговых двигателей можно преобразовать импульсную команду прямо в линейное перемещение, что значительно упростит кинематическую схему всевозможных электрических приводов.
Принципиальная схема работы линейного шагового двигателя
Статор в данном приводе представлен в виде магнитомягкой плиты, а провода подмагничиваются путем работы постоянного магнита.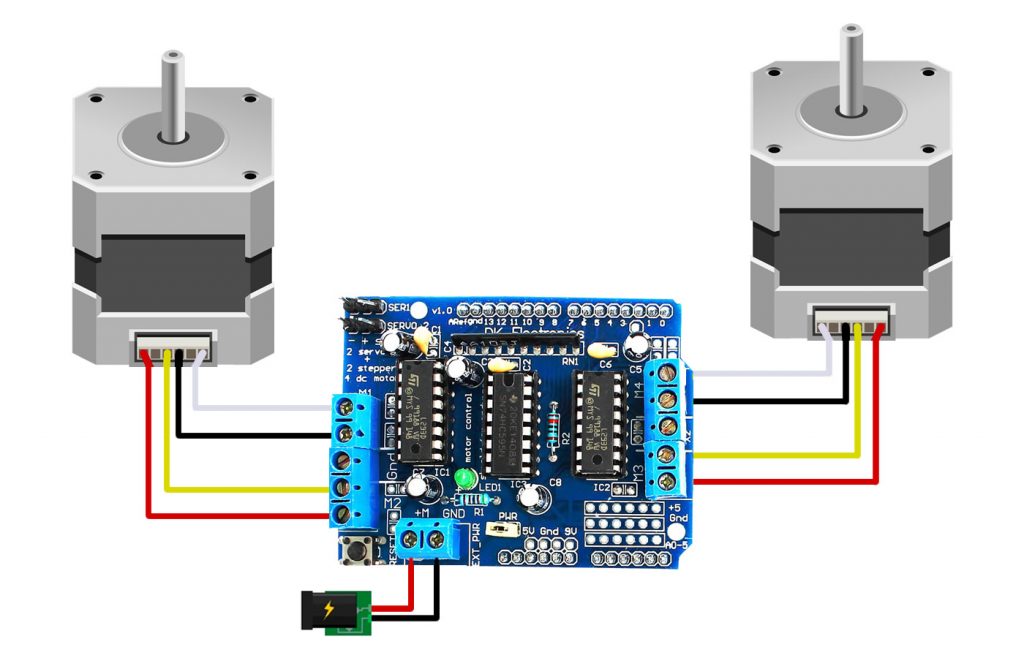
Зубцовые деления в статоре и подвижной части одинаковые, при этом они могут быть сдвинуты на половину деления в пределах одного провода ротора. Поток подмагничивания и его магнитное сопротивление, в данном случае, не зависят от того, где находится подвижная часть двигателя.
Чтобы переместить объект в плоскости согласно двум координатам, применяют двигатели двухкоординатного типа.
Также в линейных двигателях используется магнитно-воздушная подвеска. Благодаря силе магнитного притяжения ротор притягивается к статору. Далее под ротор сквозь форсунки нагнетают воздух в сжатом виде, вследствие чего появляется сила, отталкивающая ротор от статора.
Так между ними возникает воздушная подушка и ротор висит над статором с наличием минимально зазора. Это и обеспечивает минимум сопротивления движения ротора и высокоточное позиционирование.
Дополнительные рекомендации по выбору
Кроме всех перечисленных показателей, стоит учитывать еще и следующие параметры:
- Стоимость. Рекомендуется внимательно изучить цену и характеристики моторов. Иногда при одинаковых параметрах разница в цене значительная. Также не стоит ориентироваться на известную фирму. Зачастую за имя производителя добавляется до 30 % стоимости.
- Сложность настройки. Для начинающих пользователей станков с ЧПУ лучше выбирать механизм попроще. В сложном двигателе можно запутаться и сломать его.
- Назначение устройства. От того, с какой целью будет применяться станок, зависит и характеристика двигателя.
- Схема подключения. Она зачастую определяется от количества проводов.
- Наличие центр-крана. В этом случае обмотка идет совместно с проводами (3 шт.).
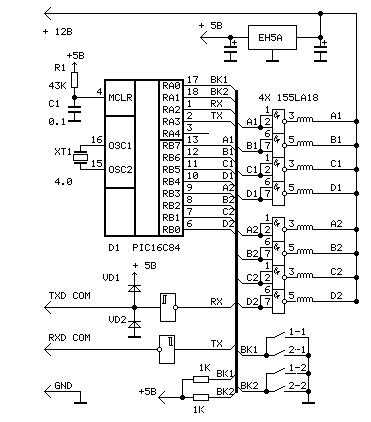 Рекомендуется внимательно изучить цену и характеристики моторов. Иногда при одинаковых параметрах разница в цене значительная. Также не стоит ориентироваться на известную фирму. Зачастую за имя производителя добавляется до 30 % стоимости.
Рекомендуется внимательно изучить цену и характеристики моторов. Иногда при одинаковых параметрах разница в цене значительная. Также не стоит ориентироваться на известную фирму. Зачастую за имя производителя добавляется до 30 % стоимости.При выборе шагового двигателя стоит учитывать все вышеперечисленные параметры. Тогда и мотор прослужит намного дольше, и работать с таким двигателем будет проще и быстрее. При покупке стоит проверять на наличие заводских браков.
- 16 ноября 2020
- 149
Подключение шаговых двигателей
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Будет интересно➡ Малоизвестные факты о двигателях постоянного тока
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам.
В первом случае используется один центр-кран каждой обмотки и один конец провода.
Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу.

Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Типичные схемы подключения ШД
Схема подключения 6-ти выводного шагового двигателя к драйверу GeckoDrive (биполярное последовательное подключение обмоток)
Схема подключения 8-ми выводного ШД с биполярным параллельным соединением обмоток к драйверу GeckoDrive
Схема подключения 8-ми выводного ШД с биполярным последовательным соединением обмоток к драйверу GeckoDrive
Управление шаговыми электродвигателями
Существуют три режима управления шаговым двигателем:
• полношаговый
• полушаговый
• микрошаговый.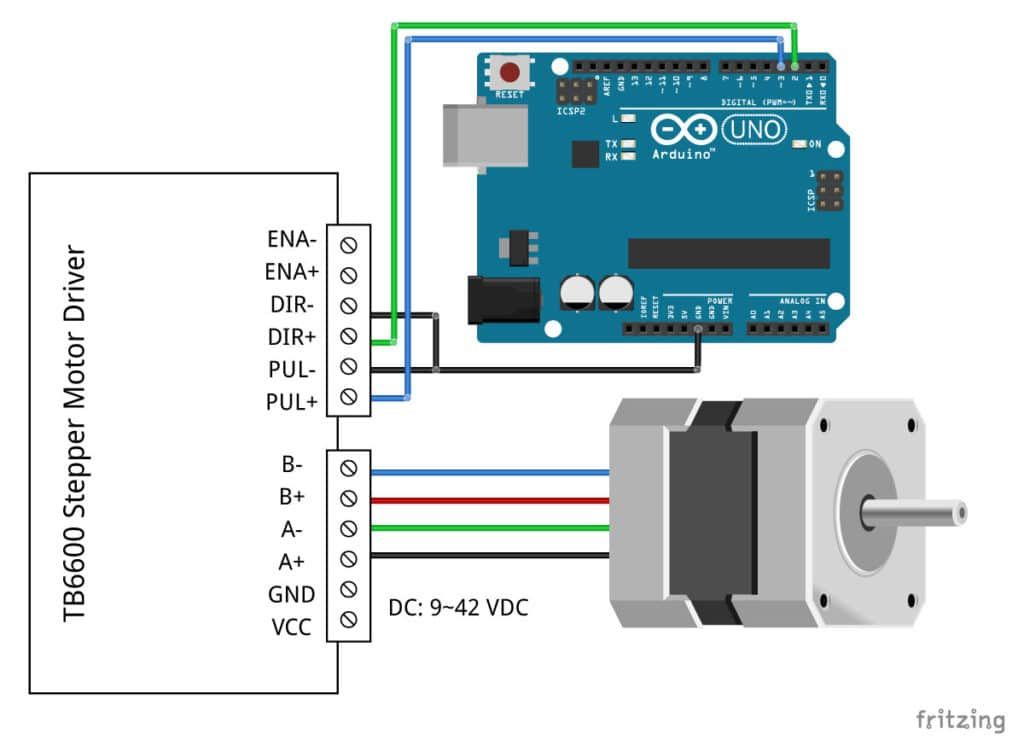
Полношаговый режим управления
Первый способ был описан в примерах выше. Это попеременная коммутация фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза.
Способ называется на английском one phase on full step – одна фаза на полный шаг. Точки равновесия ротора совпадают с полюсами статора. Недостатком этого режима является то, что в один и тот же момент используется половина обмоток для биполярного двигателя, и только четверть для униполярного.
Есть вариант полношагового режима управления при котором в одно и то же время включены две фазы. Называется two-phase-on full step – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки.
полушаговый режим
Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага. Этот способ позволяет от двигателя получить в два раза больше шагов на оборот ротора.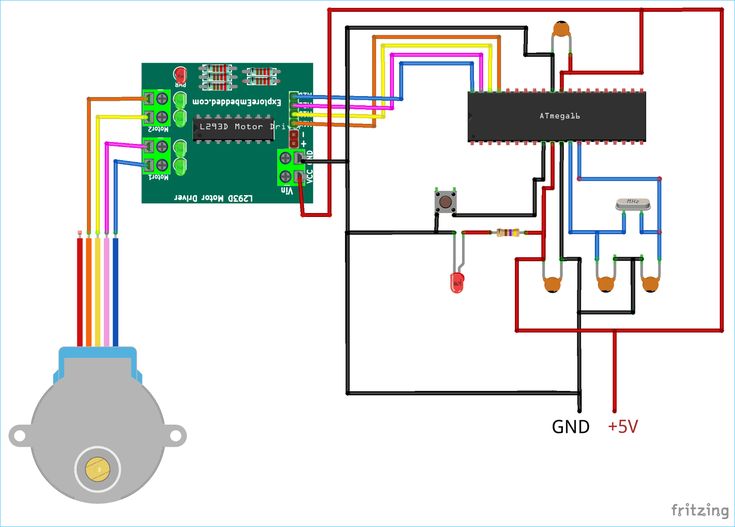
Каждый второй шаг включается одна фаза, а между ними — включаются сразу две.
В результате такой коммутации угловое перемещение шага уменьшается в два раза, или в два раза увеличивается число шагов. Полный момент получить в полушаговом режиме не удается.
Не смотря на это, полушаговый режим используется часто. Уж очень простыми методами он удваивает число шагов двигателя.
Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий.
микрошаговый режми
Чтобы зафиксировать положение ротора, необходимо формировать в обмотках двигателя ток удержания. Этот ток может быть значительно меньше номинального.
Способность шагового двигателя фиксировать свое положение при остановке позволяет обходиться без механических фиксаторов, тормозных систем и т.п.
Управление безколлекторными шд
Для управления шаговым двигателем требуется контроллер.
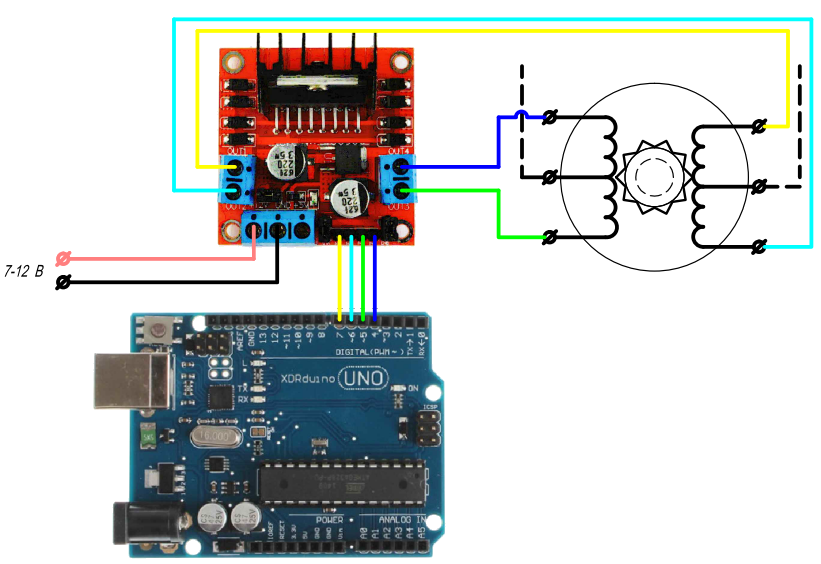 Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
Будет интересно➡ Что такое трехфазный двигатель и как он работает
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора.
В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора.
Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Цепи привода шагового двигателя
A Цепи привода шагового двигателя обычно питаются от источника постоянного тока низкого напряжения. Когда фаза должна быть под напряжением, источник постоянного тока подключается к фазе с помощью полупроводникового переключателя S (рис. 8.9).
Фазный ток нарастает со скоростью, определяемой электрической постоянной времени фазной обмотки. Когда фаза должна быть обесточена, переключатель выключается, который передает ток на обратный диод D F . Ток падает до нуля, опять же со скоростью, определяемой постоянной времени фазной обмотки. Момент двигателя, который является функцией i ph , образуется и распадается одинаково. Чтобы максимизировать крутящий момент шагового двигателя, схемы привода шагового двигателя должны быть такими, чтобы ток нарастал и уменьшался как можно быстрее, в идеале, как показано пунктирными линиями на рис. 8.9(b). Это особенно важно, когда требуются высокие скорости шага, как показано на рис. 8.9(c). Схемы привода шагового двигателя разработаны с учетом этого требования.
Чтобы максимизировать крутящий момент шагового двигателя, схемы привода шагового двигателя должны быть такими, чтобы ток нарастал и уменьшался как можно быстрее, в идеале, как показано пунктирными линиями на рис. 8.9(b). Это особенно важно, когда требуются высокие скорости шага, как показано на рис. 8.9(c). Схемы привода шагового двигателя разработаны с учетом этого требования.
Униполярный привод для двигателей с переменным сопротивлением:
В случае двигателей с переменным реактивным сопротивлением необходимо только включить или выключить фазные токи, полярность тока не имеет значения. Достаточно униполярного привода, способного подавать ток только в одном направлении. Простая униполярная схема привода, подходящая для маломощного двухфазного двигателя с переменным сопротивлением, показана на рис. 8.10.
Когда переключатель S 1 замкнут, обмотка фазы А подключается к источнику постоянного тока V d и фазный ток нарастает, а при размыкании фазный ток спадает в цепи свободного хода, состоящей из фазы А, Д F и R F . Внешний резистор R E уменьшает электрическую постоянную времени, тем самым ускоряя нарастание тока. Величину внешнего резистора R E выбирают для фиксации значения электрической постоянной времени, а затем выбирают напряжение источника V d для получения номинального тока I R в фазной обмотке. Таким образом,
Внешний резистор R E уменьшает электрическую постоянную времени, тем самым ускоряя нарастание тока. Величину внешнего резистора R E выбирают для фиксации значения электрической постоянной времени, а затем выбирают напряжение источника V d для получения номинального тока I R в фазной обмотке. Таким образом,
, где R P — сопротивление фазной обмотки.
Во время включения переключателя фазный ток также протекает через внешний резистор R E , в результате чего большая часть энергии, получаемой от источника, рассеивается в R E . Кроме того, энергия, накопленная в индуктивности фазной обмотки в течение периода включения переключателя, полностью рассеивается в сопротивлениях цепи свободного хода, когда переключатель выключен. Из-за этих потерь энергии униполярная схема на рис. 8.10 очень неэффективна и, следовательно, подходит только для маломощных цепей привода шагового двигателя.
На рис. 8.11 показана эффективная униполярная схема возбуждения, обеспечивающая быстрое нарастание и затухание тока. Он использует принцип чоппера. Показанная цепь предназначена только для одной фазы. Каждая другая фаза будет использовать аналогичную схему. Напряжение источника постоянного тока теперь может быть намного больше, чем в схемах привода шагового двигателя на рис. 8.10.
На рисунках 8.11(a), (b) и (c) показаны схема возбуждения, фазное напряжение и кривые тока соответственно. Для включения фазы полупроводниковые выключатели S 1 и S 2 замыкаются при t = t o . Это подключает фазную обмотку к источнику постоянного напряжения V d , и фазный ток i ph быстро нарастает. Когда он пересекает номинальный ток I R на заданную величину, S 1 отключается. Фазный ток свободно проходит через S 2 и Д 2 и уменьшается ниже I Р . Через фиксированный интервал включается S 1 .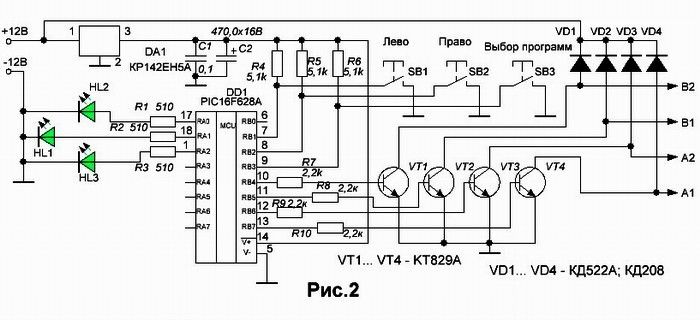 Ток фазы i ph увеличивается. При превышении им номинального тока I R на установленную величину снова отключается S 1 . Таким образом, при поочередном включении и выключении переключателя S 1 значение фазного тока поддерживается равным примерно I R . При t = t 0 + T фаза обесточивается отключением обоих S 1 и S 2 . Теперь фазный ток протекает по пути, состоящему из D 1 , источника V d и D 2 , и большая часть энергии, запасенной в индуктивности фазной обмотки, возвращается обратно к источнику V d . Поскольку фазный ток должен протекать против большого напряжения V d , он быстро спадает до нуля.
Ток фазы i ph увеличивается. При превышении им номинального тока I R на установленную величину снова отключается S 1 . Таким образом, при поочередном включении и выключении переключателя S 1 значение фазного тока поддерживается равным примерно I R . При t = t 0 + T фаза обесточивается отключением обоих S 1 и S 2 . Теперь фазный ток протекает по пути, состоящему из D 1 , источника V d и D 2 , и большая часть энергии, запасенной в индуктивности фазной обмотки, возвращается обратно к источнику V d . Поскольку фазный ток должен протекать против большого напряжения V d , он быстро спадает до нуля.
Биполярный привод для двигателей с постоянными магнитами и гибридных двигателей:
Простая биполярная схема привода для одной фазы показана на рис. 8.12. Каждая другая фаза будет использовать аналогичную схему.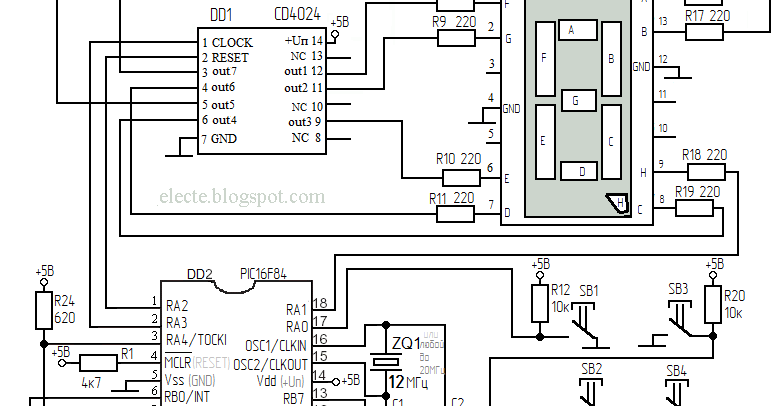 По фазной обмотке протекает положительный ток, когда полупроводниковые переключатели S 1 и S 2 проводят ток, и он несет отрицательный ток, когда S 3 и S 4 проводят.
По фазной обмотке протекает положительный ток, когда полупроводниковые переключатели S 1 и S 2 проводят ток, и он несет отрицательный ток, когда S 3 и S 4 проводят.
На фазную обмотку подается положительный ток при включении S 1 и S 2 . Внешнее сопротивление R E снижает электрическую постоянную времени, позволяя быстро нарастать фазному току. V d и R E выбраны так, чтобы удовлетворять уравнению. (8.1). Фаза обесточивается выключением S 1 и S 2 . Ток обмотки теперь протекает по пути, состоящему из D 3 , источника V d и D 4 . Большая часть энергии, запасенной в индуктивности фазной обмотки, возвращается обратно к источнику, и фазный ток быстро спадает до нуля. Из-за наличия внешнего сопротивления R E схема возбуждения малоэффективна, хотя и более эффективна, чем однополярная схема возбуждения рис.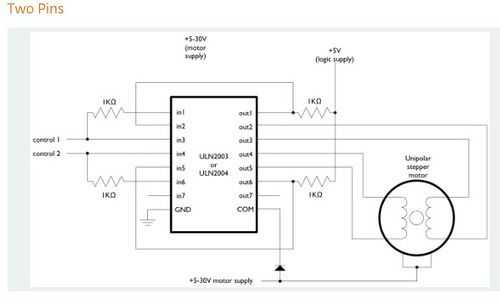 8.10.
8.10.
Путем исключения R E , и с использованием принципа прерывателя получается эффективная биполярная схема возбуждения. Затем схема работает следующим образом.
Для питания фазной обмотки положительным током включаются С 1 и С 2 . Фазный ток быстро нарастает. При превышении им номинального тока на заданную величину (рис. 8.11 (б) и (в)), S 1 отключается. Фазный ток проходит через S 2 и D 4 . Через фиксированный интервал S 1 снова включен. Таким образом, фазный ток колеблется около номинального значения I R . Когда фаза должна быть обесточена, оба S 1 и S 2 выключаются. Ток обмотки протекает по пути, состоящему из Д 3 , источника В , д и Д 4 . Фазный ток быстро затухает, и энергия, накопленная в индуктивности обмотки, восстанавливается источником питания.
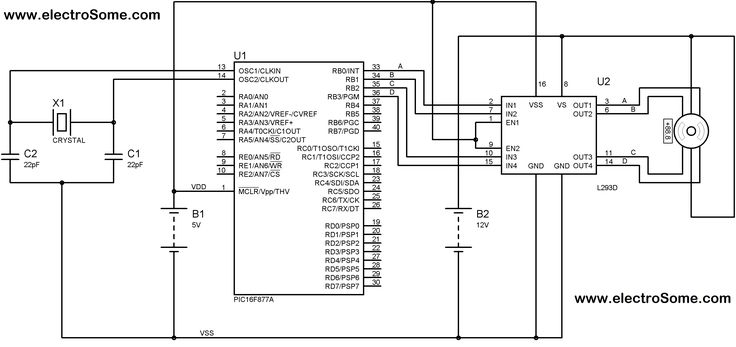 gif»> gif»> | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Q4444444444. Q444444444. 4030 IC3
Q4444444444. Q444444444. 4030 IC3 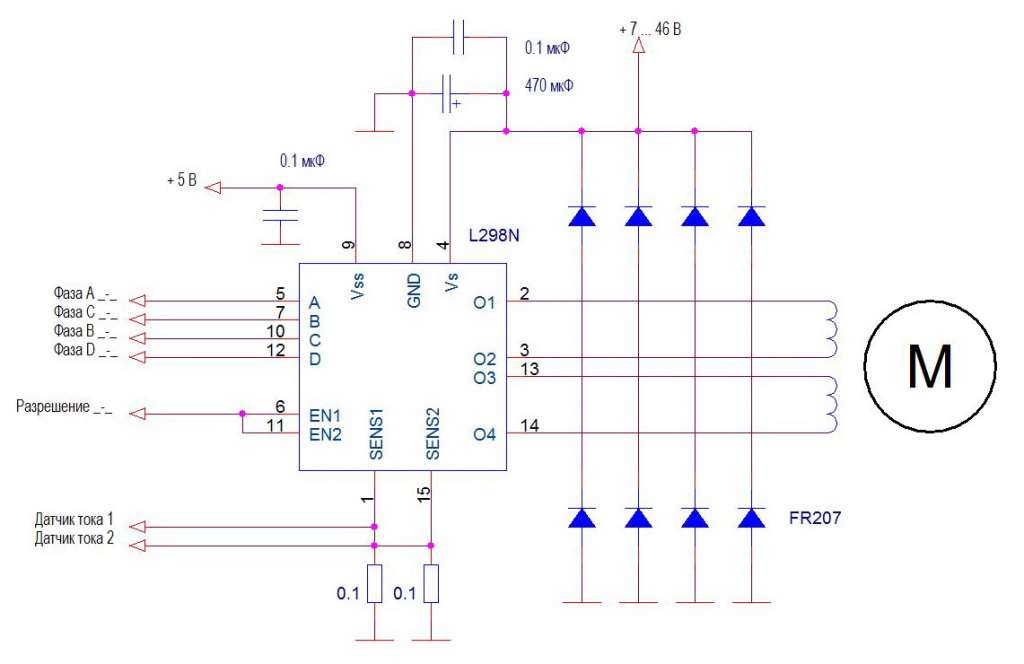
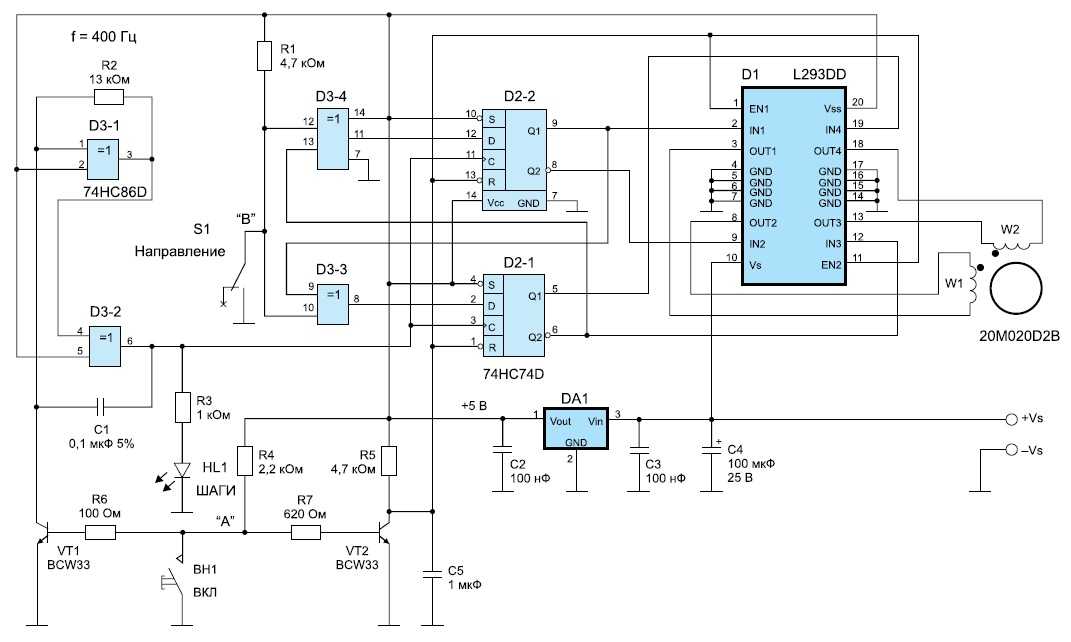 Униполярные двигатели можно подключать как биполярные, не используя плюсовые провода.
Униполярные двигатели можно подключать как биполярные, не используя плюсовые провода.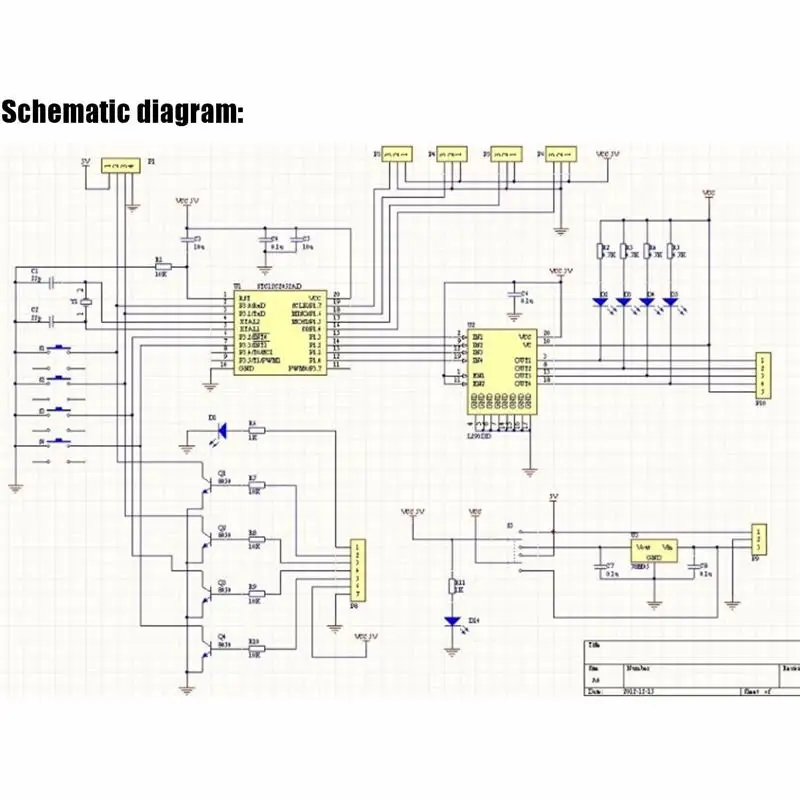
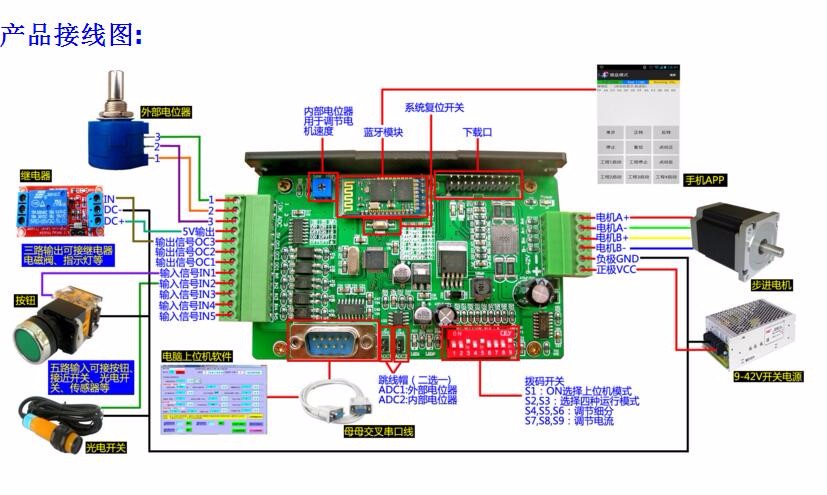
 1). Шестипроводные двигатели выводят каждый центральный кран отдельно. Два центральных отвода необходимо соединить снаружи
1). Шестипроводные двигатели выводят каждый центральный кран отдельно. Два центральных отвода необходимо соединить снаружи
 Подайте питание. Убедитесь, что переключатель SPDT установлен в положение INTernal. Посмотрите, крутится ли мотор. Если нет, то поменяйте местами только провода M1B и M2B и проверьте еще раз. Теперь он должен вращаться. VR1 будет изменять скорость шага.
Подайте питание. Убедитесь, что переключатель SPDT установлен в положение INTernal. Посмотрите, крутится ли мотор. Если нет, то поменяйте местами только провода M1B и M2B и проверьте еще раз. Теперь он должен вращаться. VR1 будет изменять скорость шага.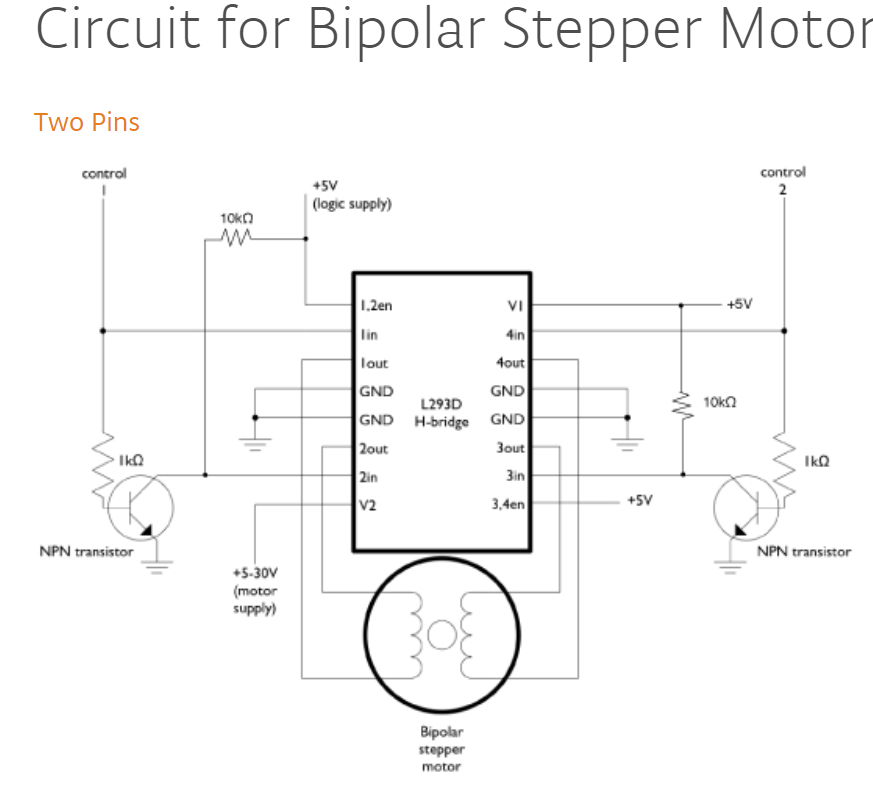
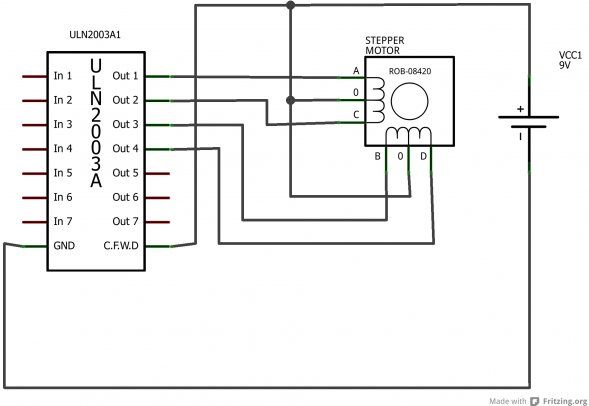
 Этот LC-метр позволяет измерять невероятно малые индуктивности, что делает его идеальным инструментом для изготовления всех типов ВЧ-катушек и катушек индуктивности. LC Meter может измерять индуктивность от 10 нГн до 1000 нГн, 1 мкГн — 1000 мкГн, 1 мГн — 100 мГн и емкости от 0,1 пФ до 900 нФ. Схема включает автоматический выбор диапазона, а также переключатель сброса и обеспечивает очень точные и стабильные показания.
Этот LC-метр позволяет измерять невероятно малые индуктивности, что делает его идеальным инструментом для изготовления всех типов ВЧ-катушек и катушек индуктивности. LC Meter может измерять индуктивность от 10 нГн до 1000 нГн, 1 мкГн — 1000 мкГн, 1 мГн — 100 мГн и емкости от 0,1 пФ до 900 нФ. Схема включает автоматический выбор диапазона, а также переключатель сброса и обеспечивает очень точные и стабильные показания. Это очень полезное стендовое испытательное оборудование для тестирования и определения частоты различных устройств с неизвестной частотой, таких как генераторы, радиоприемники, передатчики, функциональные генераторы, кристаллы и т. д.
Это очень полезное стендовое испытательное оборудование для тестирования и определения частоты различных устройств с неизвестной частотой, таких как генераторы, радиоприемники, передатчики, функциональные генераторы, кристаллы и т. д. Его можно подключить к любому источнику стереозвука, такому как iPod, компьютер, ноутбук, CD-плеер, Walkman, телевизор, спутниковый ресивер, кассетная дека или другая стереосистема для передачи стереозвука с превосходной четкостью по всему дому, офису, двору или лагерная площадка.
Его можно подключить к любому источнику стереозвука, такому как iPod, компьютер, ноутбук, CD-плеер, Walkman, телевизор, спутниковый ресивер, кассетная дека или другая стереосистема для передачи стереозвука с превосходной четкостью по всему дому, офису, двору или лагерная площадка. Он также анализирует характеристики транзистора, такие как напряжение и коэффициент усиления. Это незаменимый инструмент для устранения неполадок и ремонта электронного оборудования путем определения работоспособности и исправности электролитических конденсаторов. В отличие от других измерителей ESR, которые измеряют только значение ESR, этот измеряет значение ESR конденсатора, а также его емкость одновременно.
Он также анализирует характеристики транзистора, такие как напряжение и коэффициент усиления. Это незаменимый инструмент для устранения неполадок и ремонта электронного оборудования путем определения работоспособности и исправности электролитических конденсаторов. В отличие от других измерителей ESR, которые измеряют только значение ESR, этот измеряет значение ESR конденсатора, а также его емкость одновременно. д. Усилитель для наушников достаточно мал, чтобы поместиться в жестяную коробку Altoids, а благодаря низкому энергопотреблению может питаться от одного 9батарея В.
д. Усилитель для наушников достаточно мал, чтобы поместиться в жестяную коробку Altoids, а благодаря низкому энергопотреблению может питаться от одного 9батарея В.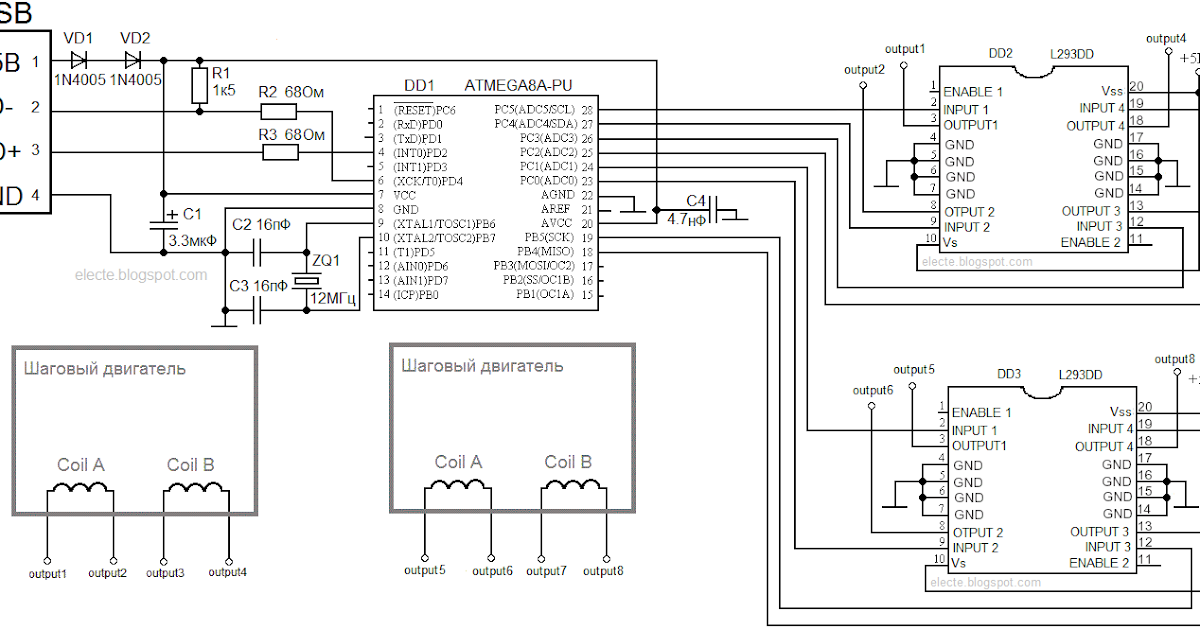 Плата оснащена 28-контактным разъемом DIP IC, заменяемым пользователем микроконтроллером ATmega328, прошитым загрузчиком Arduino, кварцевым резонатором 16 МГц и переключателем сброса. Он имеет 14 цифровых входов/выходов (0-13), 6 из которых могут использоваться как выходы ШИМ и 6 аналоговых входов (A0-A5). Скетчи Arduino загружаются через любой адаптер USB-Serial, подключенный к разъему 6-PIN ICSP female. Плата питается напряжением 2-5 В и может питаться от батареи, такой как литий-ионный элемент, два элемента AA, внешний источник питания или адаптер питания USB.
Плата оснащена 28-контактным разъемом DIP IC, заменяемым пользователем микроконтроллером ATmega328, прошитым загрузчиком Arduino, кварцевым резонатором 16 МГц и переключателем сброса. Он имеет 14 цифровых входов/выходов (0-13), 6 из которых могут использоваться как выходы ШИМ и 6 аналоговых входов (A0-A5). Скетчи Arduino загружаются через любой адаптер USB-Serial, подключенный к разъему 6-PIN ICSP female. Плата питается напряжением 2-5 В и может питаться от батареи, такой как литий-ионный элемент, два элемента AA, внешний источник питания или адаптер питания USB.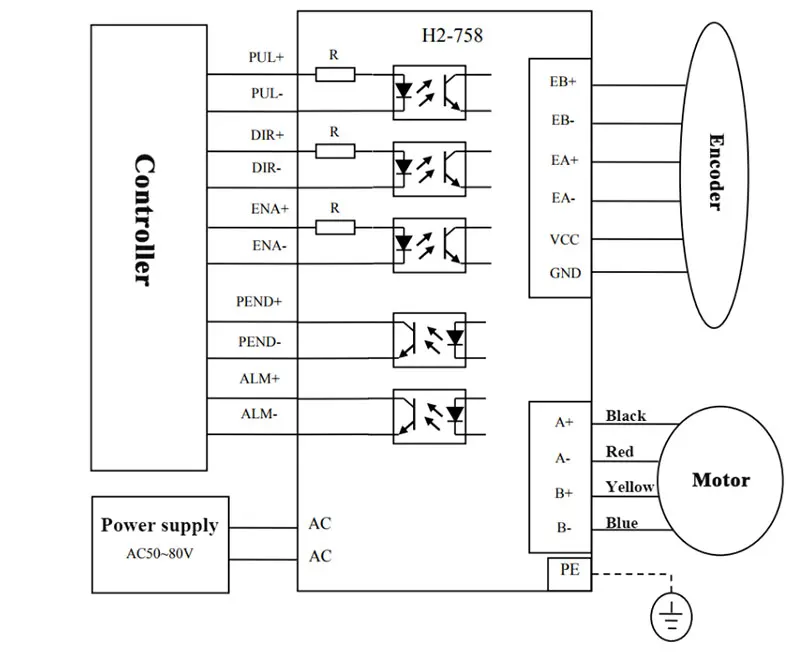 Вы можете управлять освещением, вентиляторами, системой кондиционирования, компьютером, принтером, усилителем, роботами, гаражными воротами, системами безопасности, моторизованными шторами, моторизованными оконными жалюзи, дверными замками, разбрызгивателями, моторизованными проекционными экранами и всем остальным, о чем вы только можете подумать.
Вы можете управлять освещением, вентиляторами, системой кондиционирования, компьютером, принтером, усилителем, роботами, гаражными воротами, системами безопасности, моторизованными шторами, моторизованными оконными жалюзи, дверными замками, разбрызгивателями, моторизованными проекционными экранами и всем остальным, о чем вы только можете подумать.
Коллекция цепей BEAM — это | Шаговый двигатель Wilf на базе Nu Уилф Ригтер придумал изящную (одну ИС!) схему для Я воспроизвел собственное описание этой схемы, данное Уилфом.
Обратите внимание, что публикация NuCore, на которую ссылается Уилф, Я буду обновлять эту страницу по мере того, как (успею…) Предупреждение Вот другая схема схемы NuStepper. Четыре поля в правом нижнем углу (Yl/Bk/Or/
Вот как разместить компоненты на печатной плате NuStepper Список деталей
Значения C и R2 определяют возбуждение нейрона Когда я собираю эту карту, микросхема 74*86 «сокетная», | |||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||


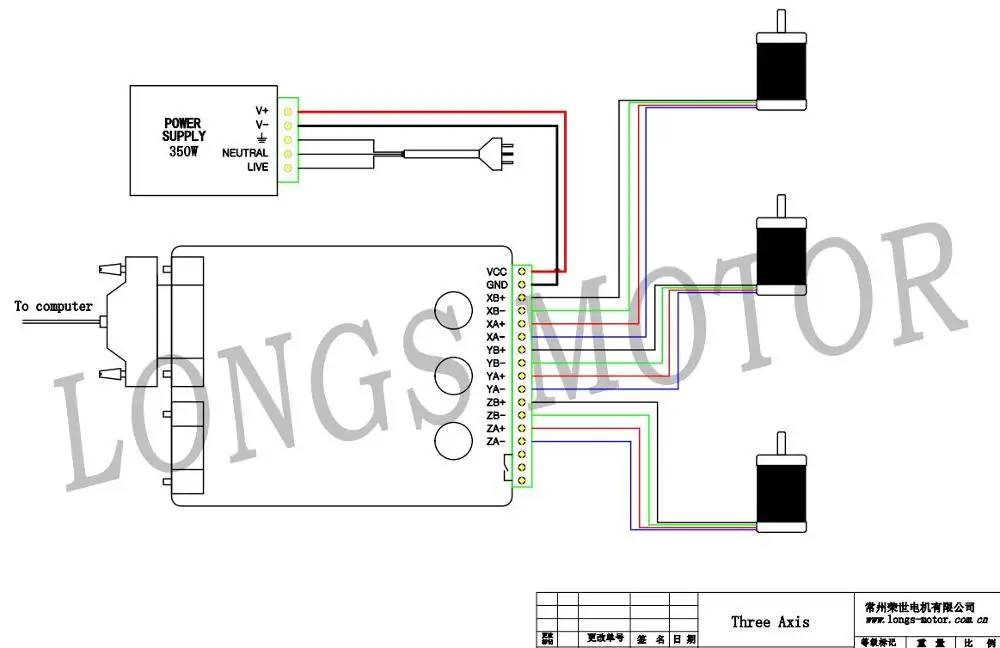
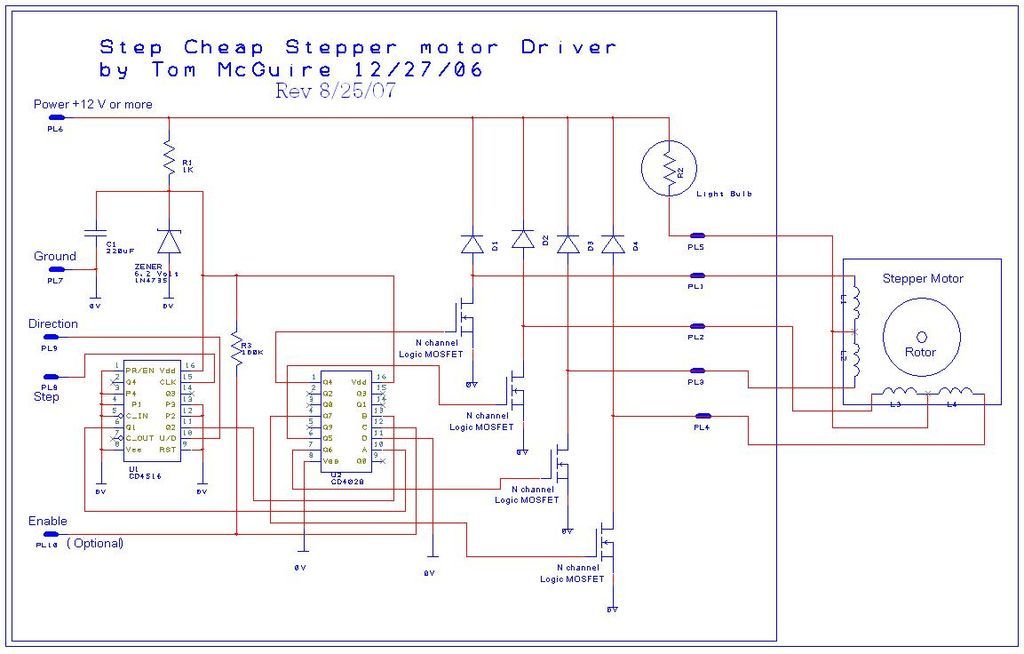 Процесс
Процесс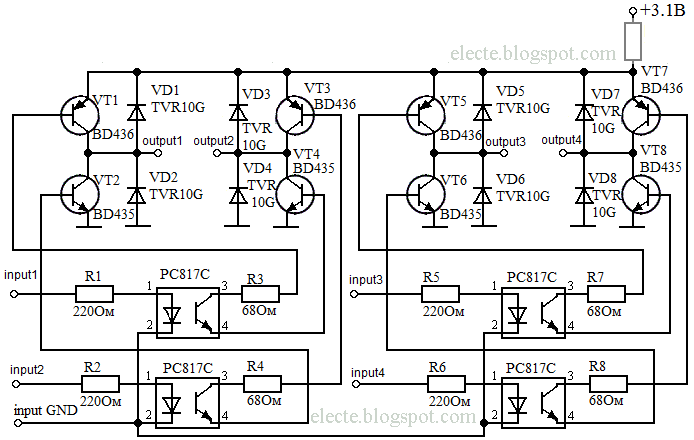 В
В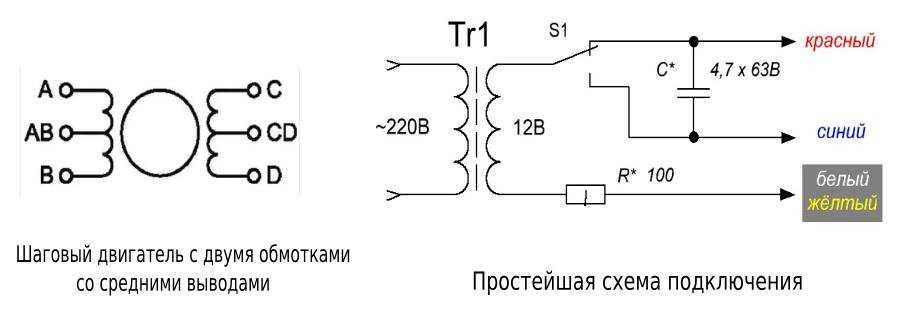


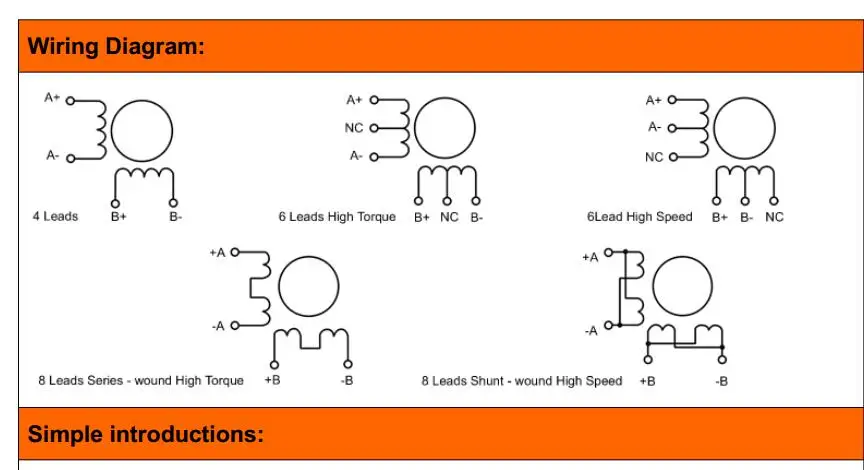 Аналогично, времязадающие резисторы и времязадающие
Аналогично, времязадающие резисторы и времязадающиеЦепи, типы, работа и их компоненты
Двигатели являются наиболее важной разработкой, и они играют важную роль во многих областях, таких как машиностроение, электротехника и другие.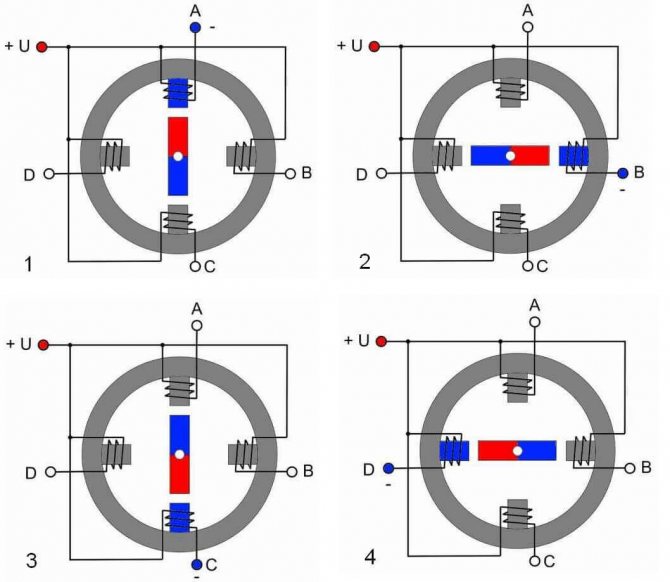 По мере того, как популярность управления двигателями возрастает, появляются большие различия в развитии двигателей, такие как изменение уровня их скорости, типа и размеров. И один тип разработки — это драйвер шагового двигателя, который является своего рода управлением двигателем.
По мере того, как популярность управления двигателями возрастает, появляются большие различия в развитии двигателей, такие как изменение уровня их скорости, типа и размеров. И один тип разработки — это драйвер шагового двигателя, который является своего рода управлением двигателем.
Развитие шаговых двигателей произошло в тот период, когда появились плунжерные насосы и электромагниты. Теперь эта статья полностью посвящена концепции драйвера шагового двигателя, его схеме, типам и компонентам.
Драйвер шагового двигателя рассматривается как схема привода, которая позволяет двигателю работать так, как он работает. Например, этим двигателям требуется адекватное и регулируемое количество энергии для фаз в точном порядке. Из-за этого драйверы шаговых двигателей считаются более импровизированными версиями двигателей, чем двигатели традиционных типов.
Эти устройства различаются по сложности, и современный тип драйверов смешивается с хост-секцией различных типов шаговых двигателей. Конфигурация устройства обычно выполняется пользователем во время установки устройства. Схемы драйверов шаговых двигателей доступны с номинальным напряжением и током, поэтому очень важно выбрать подходящую схему на основе номинала двигателя.
Конфигурация устройства обычно выполняется пользователем во время установки устройства. Схемы драйверов шаговых двигателей доступны с номинальным напряжением и током, поэтому очень важно выбрать подходящую схему на основе номинала двигателя.
Принцип работы
Принцип работы драйвера шагового двигателя заключается в регулировании функциональности двигателя путем подачи тока через несколько фаз в виде импульсов в том же направлении, что и двигатель. Разработчики устройства не часто использовали подход волнового возбуждения по таким причинам, как минимальный крутящий момент и неэффективность.
Драйверы шаговых двигателей зависят от входных данных от внешнего источника для работы устройства и обеспечивают выходные данные. В основном будет четыре сигнала для регулирования двигателя, а именно:
СБРОС- Сигналы конечной фазы находятся в заданной начальной точке
ПОЛОВИНА/ПОЛНЫЙ – в полном или половинном шаге
ЧАСЫ – Этот сигнал обеспечивает пошаговое управление
НАПРАВЛЕНИЕ – Определяет активность вращения двигателя в направлении
Электропитание двигателя осуществляется с помощью микроконтроллера, и этого достаточно, так как драйверам требуется всего несколько сигналов для его функционирования. Начальный сигнал будет сигналом шага, а следующий сигналом направления. Когда сигнал находится на уровне +5 В, он указывает направление вращения двигателя, а когда сигнал находится на уровне GND , это указывает на противоположное направление вращения двигателя.
Начальный сигнал будет сигналом шага, а следующий сигналом направления. Когда сигнал находится на уровне +5 В, он указывает направление вращения двигателя, а когда сигнал находится на уровне GND , это указывает на противоположное направление вращения двигателя.
Полный шаг обычно требует пары прямоугольных квадратурных сигналов. Основываясь на предыдущей фазе, ось двигателя будет вращаться либо по часовой стрелке, либо против часовой стрелки, а вращение прямо пропорционально уровню частоты часов, и это регулирует линейный импульс. И это функционал драйвера шагового двигателя.
Основные компоненты драйвера шагового двигателя
Работа драйвера шагового двигателя в основном состоит из трех компонентов:
- Контроллер (в основном микроконтроллер или микропроцессор)
- ИС драйвера для управления током двигателя
- Блок питания
Контроллер
Выбор контроллера для двигателя полностью зависит от начального этапа создания драйвера, и он должен иметь как минимум 4 контакта, которые являются выходными контактами для двигателя. Наряду с этим, он также должен состоять из аналого-цифрового преобразователя, последовательного порта и таймеров, а также других элементов в зависимости от использования устройства, в котором используется драйвер. Схема драйвера шагового двигателя показана на рисунке ниже.
Наряду с этим, он также должен состоять из аналого-цифрового преобразователя, последовательного порта и таймеров, а также других элементов в зависимости от использования устройства, в котором используется драйвер. Схема драйвера шагового двигателя показана на рисунке ниже.
Схема
Драйвер IC
В наши дни, помимо использования дискретных элементов драйвера, таких как транзисторы, люди делают свой выбор в пользу небольших интегральных схем. И эти интегральные схемы драйвера экономичны и упрощают процесс реализации, а конструкция увеличивает время проектирования всей схемы.
ИС драйвера необходимо выбирать таким образом, чтобы они соответствовали номинальным значениям двигателя, соответствующим значениям напряжения и тока. Наиболее подходящим типом драйвера является тип ULN2003 для драйверов шаговых двигателей. Внутри микросхемы драйвера ULN2002 каждая пара Дарлингтона может управлять током почти 500 мА, а максимальный уровень напряжения, с которым она может работать, составляет 50 В постоянного тока.
Блок питания
Драйвер шагового двигателя может работать при напряжении в диапазоне от 5 В до 12 В и, таким же образом, выходной ток находится в диапазоне от 100 до 400 ампер. Технические характеристики устройства будут указаны поставщиком, и на их основе должно быть выполнено проектирование. Мощность должна контролироваться, чтобы можно было регулировать любую нестабильность крутящего момента и скорости.
Поскольку это устройство может работать с током около 1 А, используется выходной транзистор. Он может выдерживать даже 5 ампер тока. Должна быть предусмотрена надлежащая секция радиатора в зависимости от всего потребляемого тока.
Это основные компоненты драйвера шагового двигателя.
Типы
Существуют различные типы драйверов шаговых двигателей, которые имеют различные функции для различных приложений. Важнейшие функции состоят из входного интерфейса и популярных опций, упомянутых ниже:
Шаг или Направленный — Драйвер изменяет выходной уровень, передавая импульс для вывода STEP.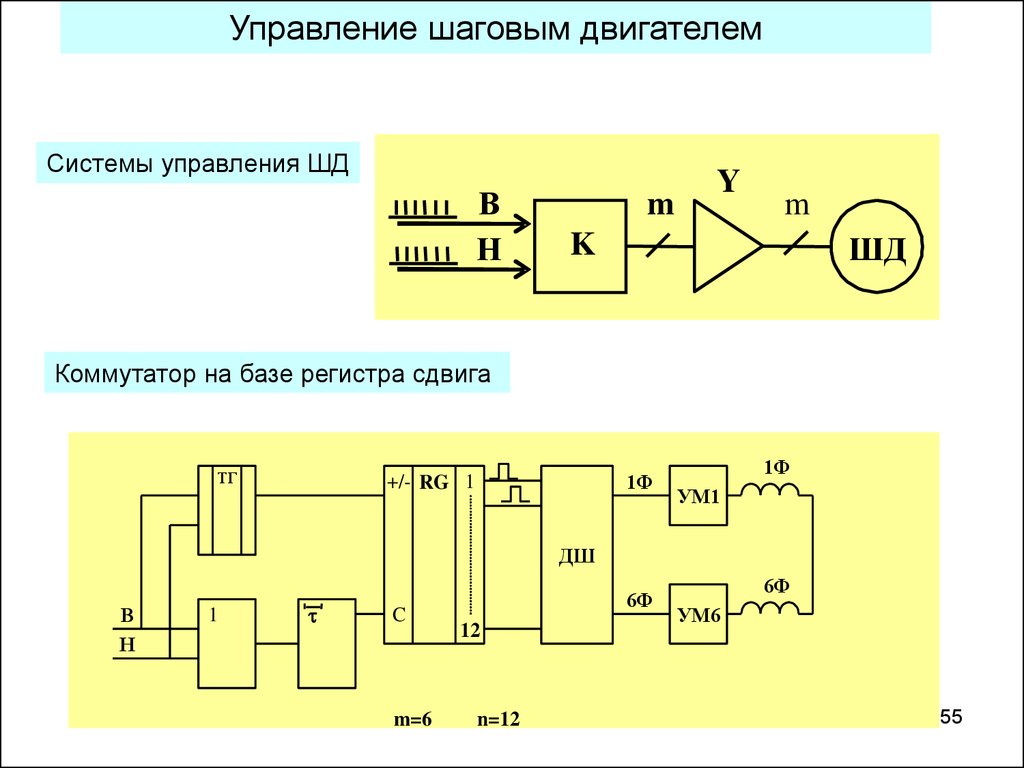 В связи с этим моторное устройство выполняет шаг, после чего его направление известно точкой штифта НАПРАВЛЕНИЕ.
В связи с этим моторное устройство выполняет шаг, после чего его направление известно точкой штифта НАПРАВЛЕНИЕ.
Фаза или Включение — Для каждой из фаз обмотки статора ФАЗА определяет путь тока, а затем запускает ВКЛЮЧЕНИЕ только тогда, когда фаза находится под напряжением.
PWM – Этот тип напрямую регулирует стробирующие сигналы полевых транзисторов как с низким, так и с высоким плечом.
Комплексный привод шагового двигателя
Это устройство является необработанным, если только микроконтроллер не запрограммирован на подачу правильных сигналов на устройство двигателя через драйвер. И устройство может работать в нескольких режимах, таких как половинный или полный шаг, а также волновой привод.
Таким образом, более важно наблюдать за взаимодействием водителя для сбора команд от клиентов и выполнения необходимых пошаговых действий. Кроме того, необходимо контролировать скорость вращения, и команда ПУСК/СТОП решает, запустить или остановить вращение двигателя.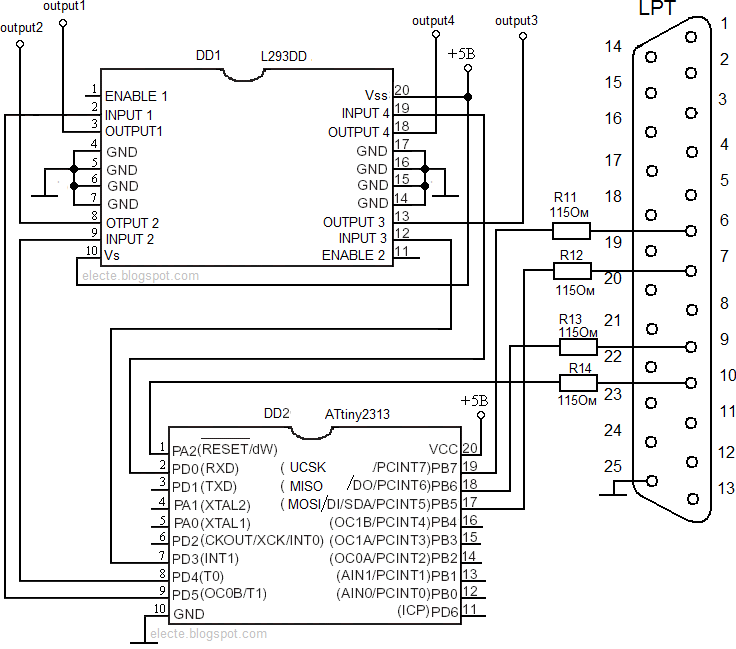 Для реализации этих функций у микроконтроллера должно быть больше контактов. Необходимы еще два контакта, которые предназначены для выбора шагового двигателя для ЗАПУСКА или ОСТАНОВКИ устройства.
Для реализации этих функций у микроконтроллера должно быть больше контактов. Необходимы еще два контакта, которые предназначены для выбора шагового двигателя для ЗАПУСКА или ОСТАНОВКИ устройства.
А другой необходим для подключения порта, который работает как регулятор скорости. Аналог цифровой схемы, встроенной в микроконтроллер, используется для регулирования скорости вращения устройства.
Алгоритмический процесс
Процесс описан в следующих шагах:
- Начните с инициализации контактов портов ввода и вывода
- Инициализировать модуль преобразователя, который является АЦП
- Обязательно организуйте отдельные операции для половинного, полного степпинга, драйвера волны и реле
- Убедиться, что двухпортовые контакты находятся в функциональном режиме и начать необходимую работу
- Наблюдайте за показаниями потенциометра с помощью АЦП и зафиксируйте значение задержки
- Завершите одну последовательность циклов и перейдите к шагу 4.

Плата драйвера драйвера шагового двигателя
Когда возникает мысль о подготовке собственной платы с использованием программного обеспечения САПР, такого как EAGLE, необходимо должным образом следить за тем, чтобы плата имела подходящее значение толщины для протекания тока двигателя. ценности. В противном случае это может привести к перегреву.
Кроме того, поскольку компоненты двигателя являются индуктивными по своей природе, необходимо проявлять особую осторожность, чтобы не создавать помех другим направлениям сигнала.
Узнайте больше о преобразователе постоянного тока в постоянный.
Это все о драйвере шагового двигателя. В этой статье представлена подробная информация о работе драйвера шагового двигателя, схеме, типах, плате и компонентах. Кроме того, знаете, каковы важные области применения драйвера шагового двигателя?
Драйверы шаговых двигателей
: пошаговое руководство | Передовой промышленный
18 декабря 2018 г. | Блог | 1 комментарий
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — это схема драйвера, которая позволяет шаговому двигателю работать так, как он работает.![]() Например, шаговые двигатели требуют достаточной и контролируемой энергии для фаз в точной последовательности. В связи с этим шаговые двигатели считаются более совершенными, чем типичный двигатель постоянного тока.
Например, шаговые двигатели требуют достаточной и контролируемой энергии для фаз в точной последовательности. В связи с этим шаговые двигатели считаются более совершенными, чем типичный двигатель постоянного тока.
Несмотря на то, что система может показаться сверхсложной, ее можно построить с помощью нескольких транзисторов. Организовав их функции включения и выключения надлежащим образом, система способна обеспечить достаточную мощность фаз, а двигатель может выполнять этот процесс поэтапно. Униполярный драйвер можно сделать в рамках приличного бюджета. Важно помнить, что этот драйвер сможет питать только униполярные двигатели. Если вы хотите подключить биполярный двигатель, вам понадобятся два полных моста. Это позволяет системе возвращать ток на ступени. Их изготовление может оказаться более сложным, но вы можете приобрести чипы H-bridge, чтобы упростить процесс.
Как работают драйверы шаговых двигателей?
Драйверы шаговых двигателей полагаются на входные данные из отдельного источника для функционирования и создания выходных данных.
Следующие четыре сигнала управляют двигателем:
- ЧАСЫ: Тактовый сигнал дает команду шага.
- СБРОС: Устанавливает сигналы конечного уровня в заданное начальное положение.
- НАПРАВЛЕНИЕ: определяет направление вращения оси двигателя.
- ПОЛУШАГ/ПОЛНЫЙ: Определяет, работать ли в полном или полушаге.
Дешевый способ питания простого шагового двигателя — через микроконтроллер. Этого достаточно, поскольку этим драйверам для работы требуется всего пара сигналов. Первый сигнал шага, а второй сигнал направления. Последний, при высоком логическом уровне +5 В, сообщает двигателю направление работы. Когда сигнал низкий (GND), он движется в противоположном направлении.
Для полного шага обычно требуется два прямоугольных сигнала в квадратуре . В зависимости от ведущей фазы ось двигателя будет вращаться либо по часовой стрелке, либо против часовой стрелки. Вращение пропорционально тактовой частоте, которая управляет импульсом на линии.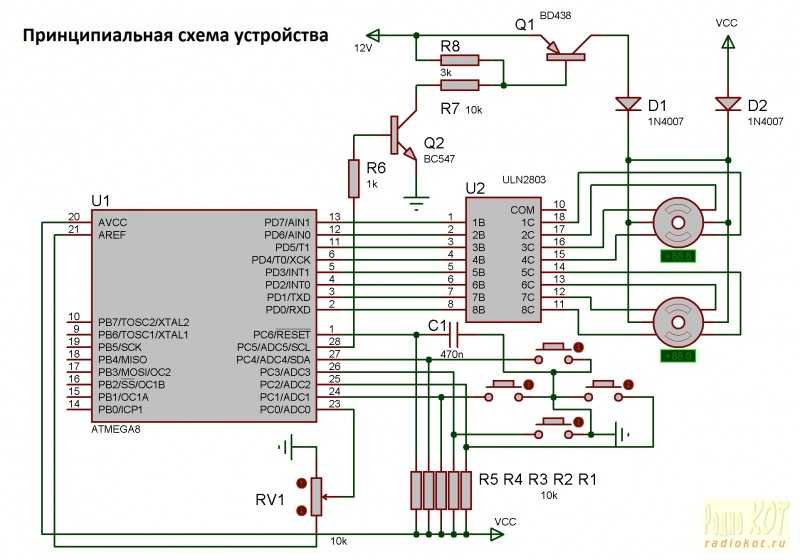 Это GND и +5V, о которых упоминалось ранее. Таким образом, в зависимости от DIP-переключателей настройки разрешения шага, двигатель будет переходить от одного положения шага к другому. Например, если он установлен в полношаговый режим, будет сделан полный шаг, и половина полного шага, если двигатель установлен в полушаговый режим, и четверть шага для четвертьшага и так далее.
Это GND и +5V, о которых упоминалось ранее. Таким образом, в зависимости от DIP-переключателей настройки разрешения шага, двигатель будет переходить от одного положения шага к другому. Например, если он установлен в полношаговый режим, будет сделан полный шаг, и половина полного шага, если двигатель установлен в полушаговый режим, и четверть шага для четвертьшага и так далее.
Из-за инерции вы должны увеличивать и уменьшать импульсы, чтобы синхронизироваться с магнитным полем. В противном случае двигатель может заглохнуть. Рампа также должна быть плавной и практически не двигаться, чтобы двигатель не заглох.
Как соединить драйверы с двигателями?
Крайне важно, чтобы драйвер соответствовал правильному двигателю. Если все сделано неправильно, производительность двигателя будет недостаточной, или он может даже повредить одну часть или обе.
При поиске подходящих двигателей и драйверов обязательно учитывайте ограничения по напряжению и максимальный ток, который может обеспечить драйвер. Обязательно учитывайте «непрерывный» номинальный ток, а не «пиковый» номинальный ток, поскольку они не применимы к шаговым двигателям. Что касается двигателя, убедитесь, что он может принимать ампер на фазу и сопротивление на фазу, которые обеспечивает драйвер. Кроме того, номинальный постоянный ток драйвера должен быть больше, чем номинальный ток двигателя.
Обязательно учитывайте «непрерывный» номинальный ток, а не «пиковый» номинальный ток, поскольку они не применимы к шаговым двигателям. Что касается двигателя, убедитесь, что он может принимать ампер на фазу и сопротивление на фазу, которые обеспечивает драйвер. Кроме того, номинальный постоянный ток драйвера должен быть больше, чем номинальный ток двигателя.
Часто указывается напряжение, но не всегда. Вы можете использовать закон Ома , чтобы рассчитать его и убедиться, что ваш процесс дает продуктивные результаты. Умножьте это на 20, чтобы получить максимальное рабочее напряжение драйвера двигателя. Если напряжение катушки не указано, квадратный корень из индуктивности двигателя (мГн) можно умножить на 32, чтобы получить напряжение питания.
Это показано ниже.
Например, если в технических характеристиках двигателя указано, что номинальное напряжение составляет 3 В (3 В * 20 = 60 В), можно безопасно управлять двигателем с драйвером с максимальным рабочим напряжением 60 В.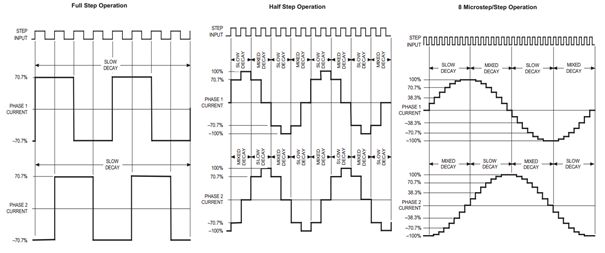
Пример 2, если в характеристиках двигателя указано, что фазный ток и сопротивление составляют 5 А и 0,6 Ом, (5 А * 0,6 Ом = 3 В * 20 = 60 В).
Пример 3, если в характеристиках двигателя указано, что индуктивность/фаза составляет 2,5 мГн ((√2,5) * 32 = 50,6 В), можно безопасно использовать двигатель с рабочим драйвером на 50 В. Реализация значения индуктивности фаз дает консервативное номинальное напряжение, поскольку это очень точный расчет максимального напряжения источника питания .
Управление шаговым двигателем не должно быть сложным
Хотя процесс настройки шагового двигателя может показаться сложным, при наличии терпения и правильного руководства процесс может быть довольно простым. Использование микроконтроллера — эффективный способ управления двигателем, поскольку для работы драйверу требуется всего несколько сигналов. Сопряжение двигателей с драйверами также может быть простым. Установив номинальный постоянный ток, ампер на фазу и используя закон Ома для расчета напряжения, вы можете успешно соединить двигатель и драйвер.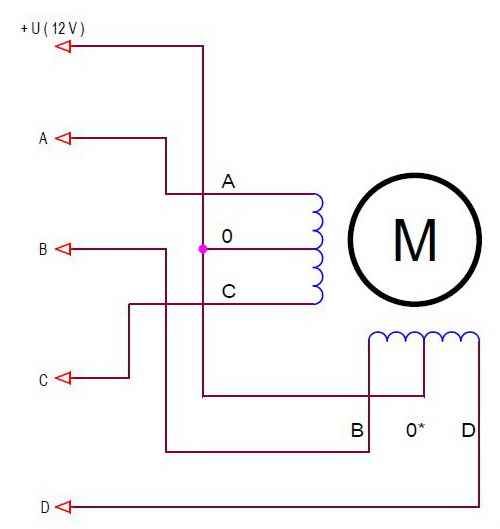
Подключив драйвер к шаговому двигателю, вы сможете подавать ток на двигатель, чтобы убедиться, что он работает так, как вы хотите. Установив эту точность, вы теперь можете выполнять проекты, требующие строгого контроля скорости и точности.
Источники: https://learn.adafruit.com/all-about-stepper-motors/driving-a-stepper
Драйверы шаговых двигателей | Доступны индивидуальные решения
Руководство по драйверу шагового двигателя
Что такое шаговый драйвер и контроллер?
Драйвер и контроллер шагового двигателя включают в себя электронику и программное обеспечение, способное генерировать необходимый ток и последовательность импульсов для привода шагового двигателя. Основная функция аппаратного и программного обеспечения шагового драйвера и контроллера заключается в обеспечении номинального фазного тока двигателя на обмотки шагового двигателя в кратчайшие сроки. Скорость изменения тока через обмотки имеет решающее значение для работы шагового двигателя с оптимальной скоростью и крутящим моментом. Сила сопротивления изменению тока — это индуктивность. Чтобы ток протекал быстрее, он должен преодолеть силу индуктивности. Индуктивная постоянная времени τ = L/R играет жизненно важную роль в скорости протекания тока. Низкая индуктивная постоянная времени обеспечивает более высокую скорость тока, в то время как большая индуктивная постоянная времени снижает скорость тока. Драйвер шагового двигателя и контроллер работают, прерывая входное напряжение питания. Драйвер шагового двигателя делает это с помощью встроенной микросхемы широтно-импульсной модуляции (ШИМ). Три основные категории шаговых драйверов и контроллеров включают L/R, Bilevel и PWM.
Сила сопротивления изменению тока — это индуктивность. Чтобы ток протекал быстрее, он должен преодолеть силу индуктивности. Индуктивная постоянная времени τ = L/R играет жизненно важную роль в скорости протекания тока. Низкая индуктивная постоянная времени обеспечивает более высокую скорость тока, в то время как большая индуктивная постоянная времени снижает скорость тока. Драйвер шагового двигателя и контроллер работают, прерывая входное напряжение питания. Драйвер шагового двигателя делает это с помощью встроенной микросхемы широтно-импульсной модуляции (ШИМ). Три основные категории шаговых драйверов и контроллеров включают L/R, Bilevel и PWM.
Блок-схема системы шагового двигателя
Как работает драйвер и контроллер шагового двигателя?
Ротор, прикрепленный к металлической шестерне шагового двигателя, окружен электромагнитами. Электромагниты также имеют шестеренчатые зубья, которые обращены к шестерням на роторе, но не соприкасаются друг с другом.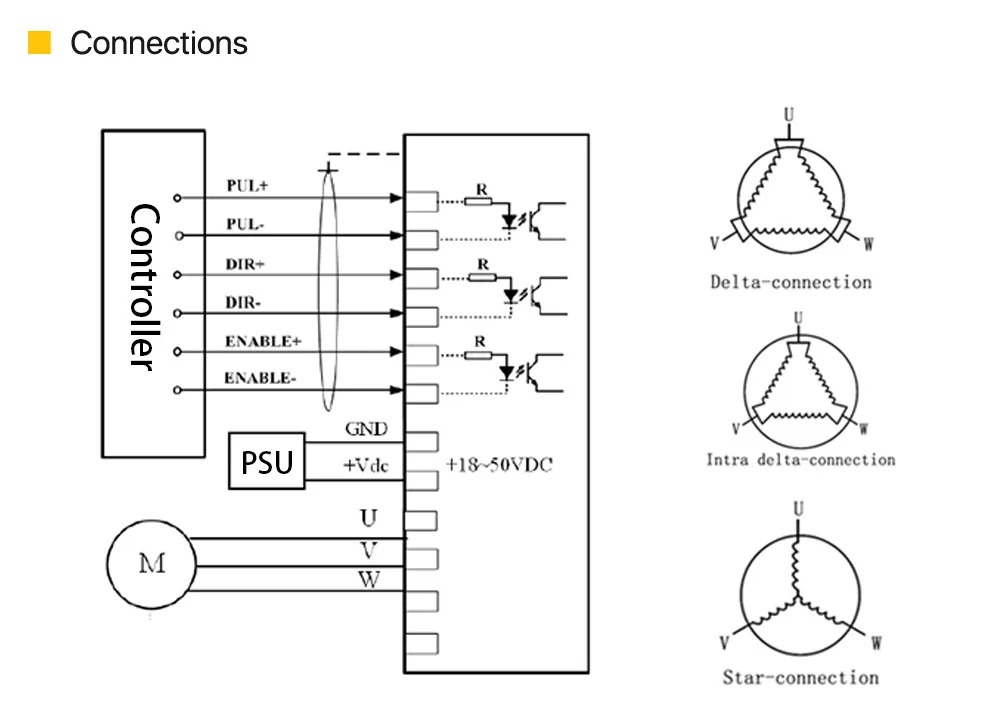 Как только конструкция понятна, движение шагового двигателя в основном остается за драйвером шагового двигателя и контроллером. Драйвер шагового двигателя и контроллер управляют двигателем, включая электромагниты по отдельности с помощью импульсных сигналов, которые проходят через катушки для создания электромагнитных полей. Это событие приводит к тому, что шестерни совмещаются с первым электромагнитом под напряжением, но не со вторым. Следовательно, чтобы включить шаговый двигатель, драйвер шагового двигателя выключает первый электромагнит и включает второй электромагнит. Это поворачивает двигатель на один шаг. Продолжение этого процесса, от электромагнита к электромагниту, позволяет шаговому двигателю непрерывно вращаться за счет управления драйвером шагового двигателя и контроллером.
Как только конструкция понятна, движение шагового двигателя в основном остается за драйвером шагового двигателя и контроллером. Драйвер шагового двигателя и контроллер управляют двигателем, включая электромагниты по отдельности с помощью импульсных сигналов, которые проходят через катушки для создания электромагнитных полей. Это событие приводит к тому, что шестерни совмещаются с первым электромагнитом под напряжением, но не со вторым. Следовательно, чтобы включить шаговый двигатель, драйвер шагового двигателя выключает первый электромагнит и включает второй электромагнит. Это поворачивает двигатель на один шаг. Продолжение этого процесса, от электромагнита к электромагниту, позволяет шаговому двигателю непрерывно вращаться за счет управления драйвером шагового двигателя и контроллером.
Шаговые двигатели могут сделать 200 или меньше шагов, чтобы сделать один полный оборот. Направление вращения двигателя можно изменить, поменяв порядок включения электромагнитов.
Основные типы драйверов и контроллеров шаговых двигателей
Производительность шагового двигателя сильно зависит от схемы драйвера шагового двигателя. За счет более быстрого переключения полюсов статора кривые крутящего момента могут быть расширены до более высоких скоростей. Для преодоления индуктивности и более быстрого переключения обмоток необходимо увеличить напряжение возбуждения. Драйвер шагового двигателя подразделяется на три категории: драйверы L/R, двухуровневые и с широтно-импульсной модуляцией (ШИМ).
За счет более быстрого переключения полюсов статора кривые крутящего момента могут быть расширены до более высоких скоростей. Для преодоления индуктивности и более быстрого переключения обмоток необходимо увеличить напряжение возбуждения. Драйвер шагового двигателя подразделяется на три категории: драйверы L/R, двухуровневые и с широтно-импульсной модуляцией (ШИМ).
Драйвер шагового двигателя L/R – Resistance Limited
Драйвер шагового двигателя L/R был основой для более старых моделей приводов. Этот метод привода обеспечивает работу в полном и полушаговом режимах. Шаговые двигатели, управляемые драйвером L/R, не допускают переменного управления уровнями тока и обеспечивают производительность системы от низкой до умеренной. Поэтому драйвер L/R обычно используется только в качестве замены старых систем шаговых двигателей. Драйвер шагового двигателя L/R представляет собой низкопроизводительный драйвер, который обеспечивает полный номинальный рабочий крутящий момент только на низких и средних скоростях, что приводит к ограниченной выходной мощности. Однако скорости и выходной мощности может быть вполне достаточно для некоторых низкоскоростных приложений. Драйверы с ограничением сопротивления или шаговые драйверы L/R используют гасящие резисторы для согласования двигателя с источником питания. Эти резисторы обычно включают последовательно с общими выводами шагового двигателя. Их сопротивление следует рассчитывать исходя из номинального тока и напряжения фазы шагового двигателя. Схемы драйвера шагового двигателя L/R неэффективны для приложений, требующих среднего или высокого крутящего момента и/или скорости.
Однако скорости и выходной мощности может быть вполне достаточно для некоторых низкоскоростных приложений. Драйверы с ограничением сопротивления или шаговые драйверы L/R используют гасящие резисторы для согласования двигателя с источником питания. Эти резисторы обычно включают последовательно с общими выводами шагового двигателя. Их сопротивление следует рассчитывать исходя из номинального тока и напряжения фазы шагового двигателя. Схемы драйвера шагового двигателя L/R неэффективны для приложений, требующих среднего или высокого крутящего момента и/или скорости.
ВНИМАНИЕ: Резисторы, являющиеся частью задействованной схемы, могут выделять значительное количество тепла (достаточно горячее, чтобы обжечь кожу при прикосновении). Требуемый источник питания и гасящие резисторы могут быть довольно громоздкими; это еще одна причина, по которой шаговый драйвер L / R менее желателен. Эти факторы необходимо учитывать перед выбором типа драйвера шагового двигателя, который будет использоваться с вашим двигателем.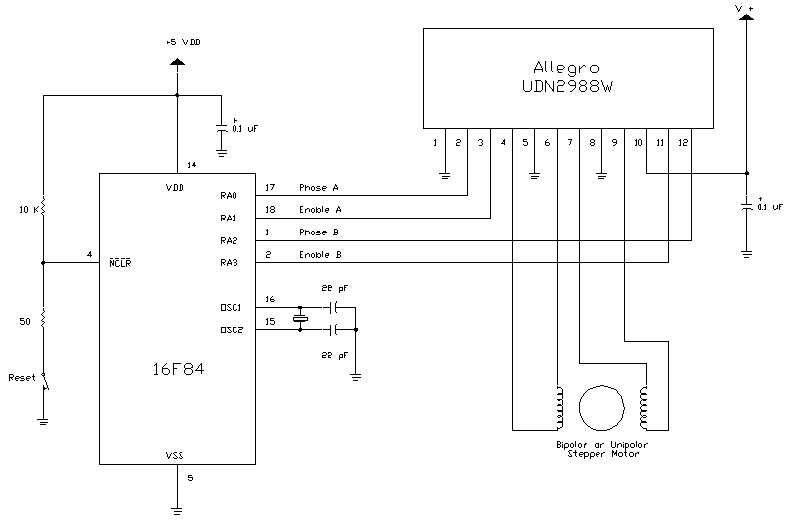
ПРИМЕЧАНИЕ: В более успешных драйверах шаговых двигателей L/R требования к производительности достаточно низкие (т. В этих приложениях фазные напряжения шагового двигателя часто находятся в диапазоне от 5 до 35 вольт, что соответствует фазным токам в диапазоне от низких до очень низких. Эти приложения составляют большую часть практического использования драйвера шагового двигателя L/R.
Двухуровневый драйвер шагового двигателя
Двухуровневый драйвер шагового двигателя использует как высокое, так и низкое напряжение. Двухуровневый драйвер шагового двигателя использует высокое напряжение для получения высокой скорости тока, чтобы увеличить время нарастания в обмотках шагового двигателя. Когда достигается рабочий уровень тока, драйвер шагового двигателя отключает высокое напряжение и поддерживает уровень тока от источника низкого напряжения, отсюда и термин двухуровневый. Пока шаговый двигатель работает, высокое напряжение пропускает ток в обмотки, обеспечивая ток, превышающий требуемый, по мере увеличения скорости шага. Эта схема переключения низкого-высокого-низкого напряжения обеспечивает более высокую эффективность и меньшую стоимость, чем то, что можно получить с помощью прерывателей и других более экзотических схем. Двухуровневый шаговый драйвер устраняет необходимость в гасящих резисторах, однако его проектирование и изготовление несколько дороже. Из-за растущей популярности двухуровневого драйвера шагового двигателя в настоящее время он в целом является довольно экономичным. Преимущество двухуровневого драйвера шагового двигателя состоит в том, что он не вызывает перегрева двигателя, а также проблем с радиопомехами и электромагнитными помехами, характерными для драйверов с прерывателем. Anaheim Automation предлагает полную линейку драйверов двухуровневых шаговых двигателей от 1 до 10 ампер в зависимости от модели.
Эта схема переключения низкого-высокого-низкого напряжения обеспечивает более высокую эффективность и меньшую стоимость, чем то, что можно получить с помощью прерывателей и других более экзотических схем. Двухуровневый шаговый драйвер устраняет необходимость в гасящих резисторах, однако его проектирование и изготовление несколько дороже. Из-за растущей популярности двухуровневого драйвера шагового двигателя в настоящее время он в целом является довольно экономичным. Преимущество двухуровневого драйвера шагового двигателя состоит в том, что он не вызывает перегрева двигателя, а также проблем с радиопомехами и электромагнитными помехами, характерными для драйверов с прерывателем. Anaheim Automation предлагает полную линейку драйверов двухуровневых шаговых двигателей от 1 до 10 ампер в зависимости от модели.
ПРИМЕЧАНИЕ: Двухуровневый драйвер шагового двигателя может управлять шаговым двигателем только в полушаговом или полношаговом режимах. Если плавность критична для вашего приложения, вам может потребоваться использовать микрошаговый драйвер или шаговый двигатель с шагом 0,9 градуса.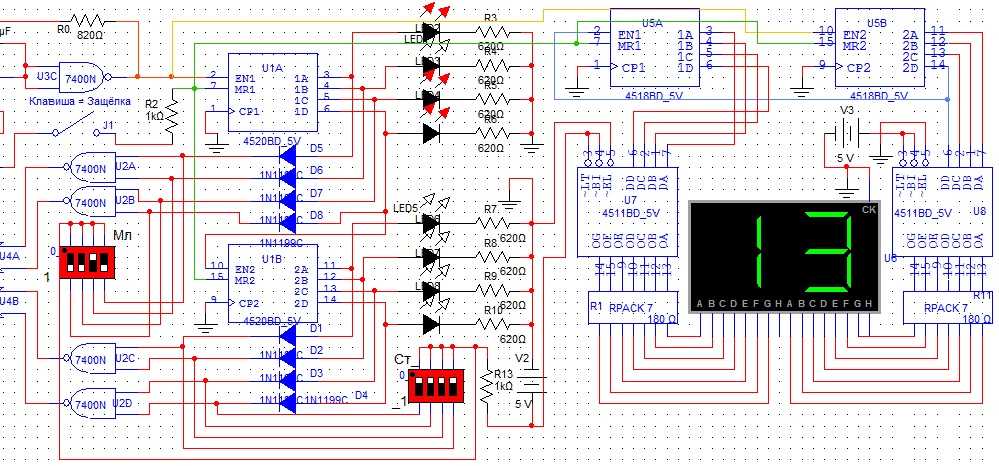
Драйвер/контроллер шагового двигателя с ШИМ (прерывателем) – Microstep
Драйвер и контроллер шагового двигателя с ШИМ (широтно-импульсной модуляцией), также называемый прерывателем, драйвером постоянного тока или драйвером микрошага, использует один источник высокого напряжения. В ШИМ-драйвере ток шагового двигателя регулируется включением и выключением выходных транзисторов для достижения среднего уровня тока. Существуют преимущества и недостатки систем шаговых драйверов, использующих ШИМ. Наиболее выдающейся особенностью драйверов ШИМ является возможность управлять шаговыми двигателями в микрошаговом режиме. Для приложений, требующих плавности, микрошаговый шаговый драйвер является наиболее подходящим вариантом. Микрошаговый драйвер будет поддерживать постоянный ток на шаговом двигателе на всех скоростях, обеспечивая превосходную производительность! Как правило, более дорогостоящие и сложные, чем драйверы шаговых двигателей L/R и Bilevel, микрошаговые драйверы обеспечивают повышение тока и стабилизацию среднего диапазона, что оказывается важным для многих приложений.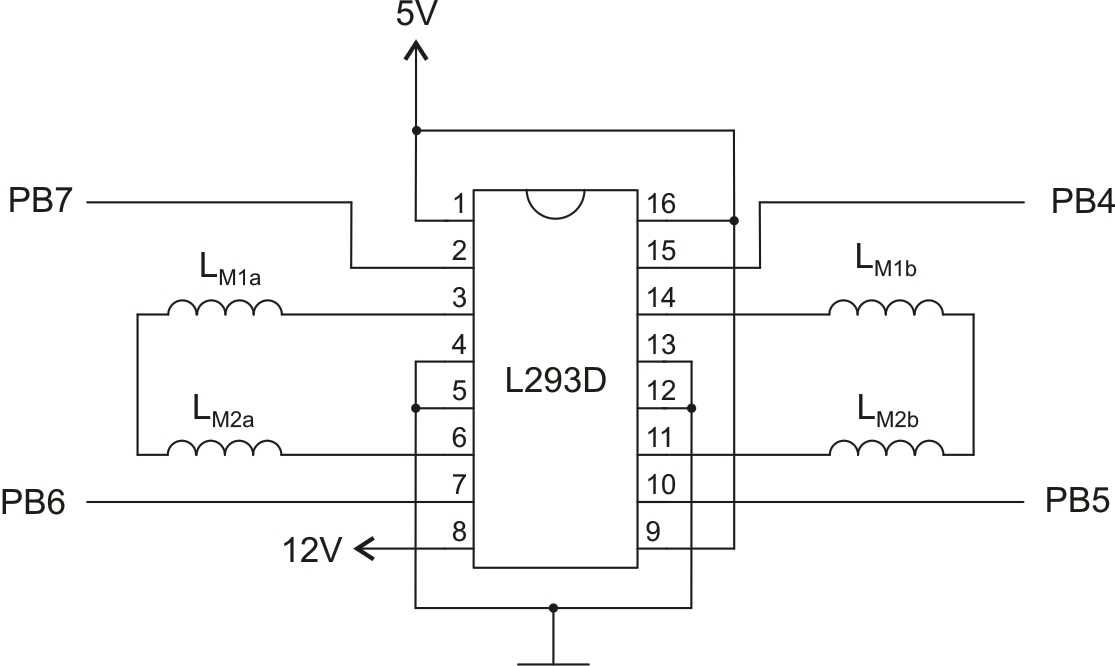 Недостатками приводов чоппера являются создание электромагнитных и радиочастотных помех, а также проблемы с перегревом двигателей. Anaheim Automation предлагает полную линейку шаговых драйверов с микрошагом от 1 до 10 ампер, в зависимости от модели.
Недостатками приводов чоппера являются создание электромагнитных и радиочастотных помех, а также проблемы с перегревом двигателей. Anaheim Automation предлагает полную линейку шаговых драйверов с микрошагом от 1 до 10 ампер, в зависимости от модели.
Микрошаг
Теоретический микрошаг — Высокий микрошаг (25 000 — 50 000 шагов на оборот) требует высокой частоты импульсов для достижения более высоких скоростей. Например, если ваше разрешение микрошага составляет 25 000 шагов на разрешение, ваш источник импульсов должен быть способен производить 750 000 импульсов в секунду, если он хочет работать с максимальной скоростью 1800 об/мин.
ТЕХНИЧЕСКИЙ СОВЕТ: Прежде чем выбрать разрешение шага, убедитесь, что ваше устройство, генерирующее импульсы, может производить шаги с достаточно высокой частотой для достижения желаемой максимальной скорости.
Крутящий момент, доступный на микрошаг, уменьшается по мере увеличения разрешения шага.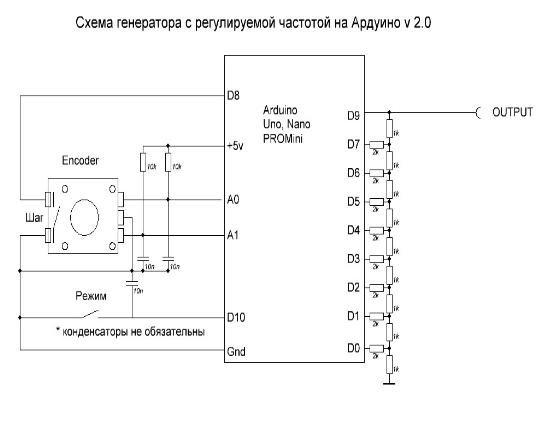 Следующее уравнение объясняет, как определяется крутящий момент, доступный для каждого микрошага:
Следующее уравнение объясняет, как определяется крутящий момент, доступный для каждого микрошага:
Крутящий момент на микрошаг = удерживающий момент двигателя X SIN (90°/микрошагов на шаг).
Пример: Если используемое разрешение составляет 10 000 шагов на оборот с двигателем на 100 унций на дюйм, то каждый микрошаг будет генерировать изменение крутящего момента на 3,1 унции на дюйм. Увеличение разрешения до 50 000 шагов на оборот приведет к тому, что каждый микрошаг будет производить изменение крутящего момента на 0,63 унции на дюйм.
Если разрешение составляет 10 000 шагов на оборот, а трение груза составляет 3 унции на дюйм, ожидается немедленный ответ на вашу команду двигаться. Увеличение разрешения до 50 000 шагов на оборот потребует 5 микрошагов, прежде чем крутящий момент сможет достичь уровня, на котором он может перемещать нагрузку. Это часто называют «пустым шагом», и его можно преодолеть, если правильно выбрать разрешение шага и размер шагового двигателя.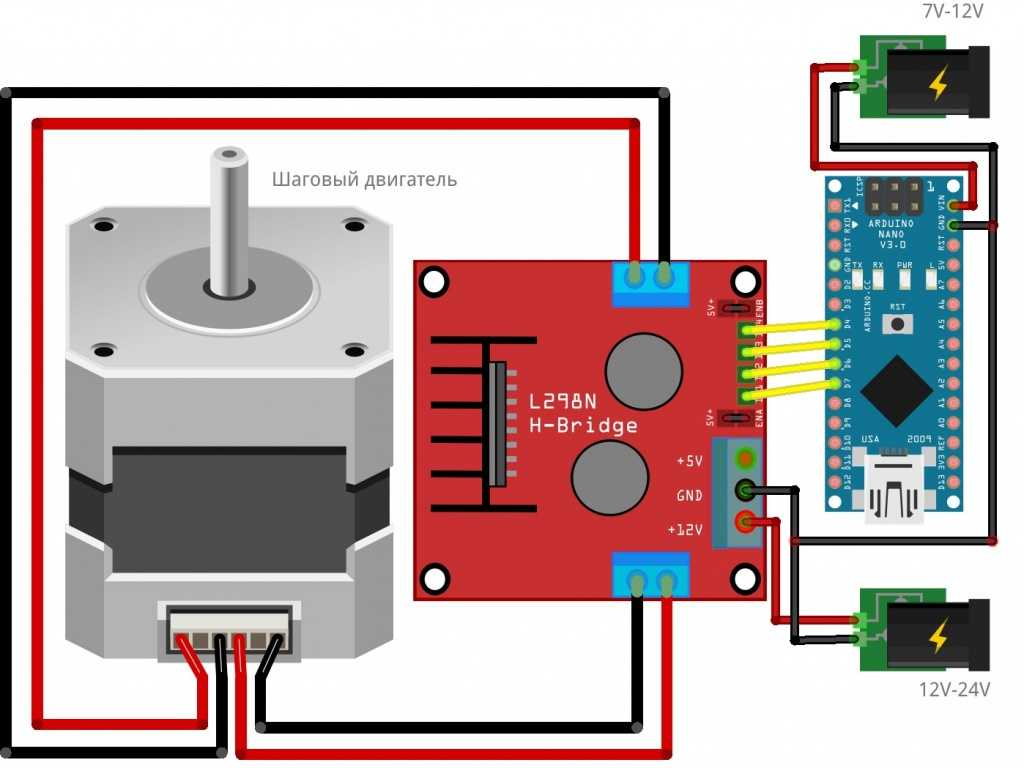
Как управлять шаговым двигателем
Драйвер и контроллер шагового двигателя управляются источником питания постоянного тока с соответствующими схемами и архитектурой программного обеспечения для управления последовательностью переключения, отправляемой на шаговый двигатель, которая заставляет вал вращаться. Используемая схема не только посылает правильную последовательность импульсов двигателю, но также управляет скоростью, направлением и разрешением (шагов на оборот) шагового двигателя.
Как выбрать драйвер шагового двигателя
Скорость и направление вращения шагового двигателя определяются соответствующей конфигурацией цифровых устройств управления. Выбор наиболее совместимого драйвера и контроллера шагового двигателя и шагового двигателя может сэкономить деньги пользователя и стать менее громоздким решением для управления движением. Anaheim Automation классифицирует основные типы цифровых устройств управления следующим образом:
• Драйверы шаговых двигателей — предлагаются полношаговые, полушаговые и микрошаговые
• Контроллеры шаговых двигателей (иногда называемые звеньями управления — контроллеры-индексаторы и генераторы импульсов продаются отдельно или в пакетах драйверов
• Драйвер шагового двигателя Пакеты – упакованные устройства, которые включают драйверы и дополнительный контроллер с соответствующим блоком питания (большинство моделей представляют собой закрытые устройства с вентиляторным охлаждением)
• Интегрированные шаговые двигатели/драйверы/контроллеры – упакованные в конце шагового двигателя драйверы и простые контроллеры (доступны только для высокомоментных шаговых двигателей)
Драйверы и контроллеры шаговых двигателей обеспечивают метод точного управления скоростью и позиционированием.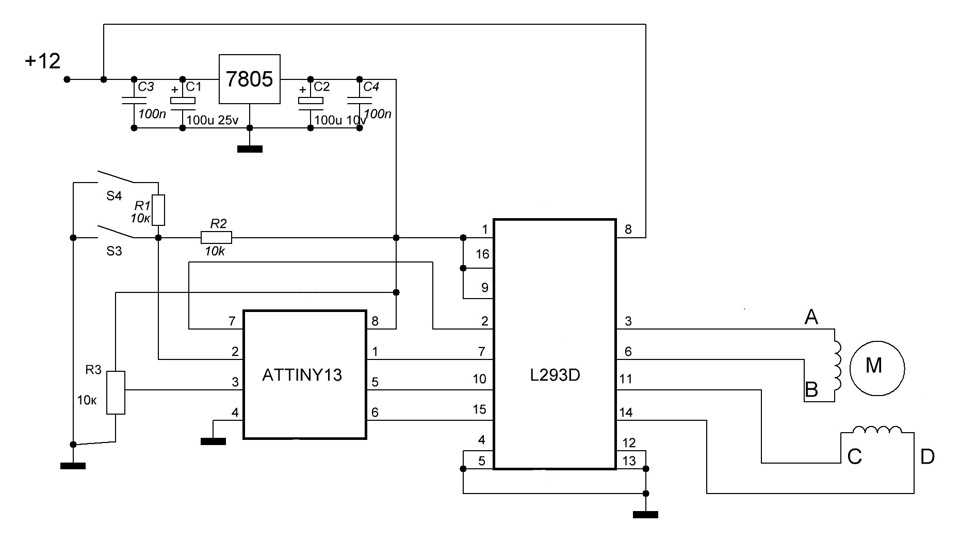 С каждым импульсом, преобразованным в цифровую информацию, двигатель может выполнять точное пошаговое вращение без необходимости использования механизмов обратной связи (например, тахометров или энкодеров). В системе с разомкнутым контуром устраняются проблемы фазового сдвига контура обратной связи и связанной с этим нестабильности, характерные для сервоприводов. Прежде чем разработчик выберет подходящую комбинацию шагового двигателя, драйвера и контроллера для приложения, необходимо учитывать определенные переменные. Anaheim Automation предлагает полную линейку двухуровневых драйверов шаговых двигателей от 1 до 10 А, в зависимости от модели, а также шаговые контроллеры, шаговые двигатели, пакеты драйверов и линейку интегрированных контроллеров шаговых двигателей/драйверов.
С каждым импульсом, преобразованным в цифровую информацию, двигатель может выполнять точное пошаговое вращение без необходимости использования механизмов обратной связи (например, тахометров или энкодеров). В системе с разомкнутым контуром устраняются проблемы фазового сдвига контура обратной связи и связанной с этим нестабильности, характерные для сервоприводов. Прежде чем разработчик выберет подходящую комбинацию шагового двигателя, драйвера и контроллера для приложения, необходимо учитывать определенные переменные. Anaheim Automation предлагает полную линейку двухуровневых драйверов шаговых двигателей от 1 до 10 А, в зависимости от модели, а также шаговые контроллеры, шаговые двигатели, пакеты драйверов и линейку интегрированных контроллеров шаговых двигателей/драйверов.
Разработчик машин или процессов должен изучить несколько параметров, таких как характеристики нагрузки, требования к производительности и механическую конструкцию, включая методы соединения, для оптимального решения.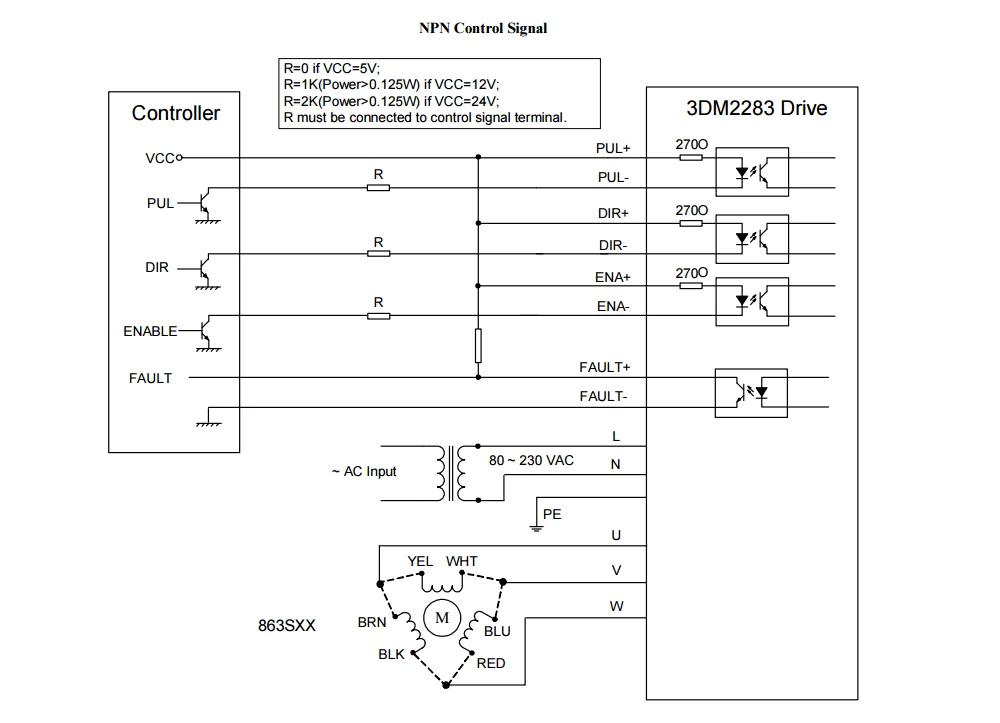 Невыполнение этого требования может привести к ухудшению производительности системы или стать более дорогостоящим, чем необходимо. Для оптимального управления шаговым двигателем и контроллером необходимо учитывать следующие факторы:
Невыполнение этого требования может привести к ухудшению производительности системы или стать более дорогостоящим, чем необходимо. Для оптимального управления шаговым двигателем и контроллером необходимо учитывать следующие факторы:
1. Параметры:
a. Расстояние, которое нужно пройти
б. Максимальное время, отведенное на ход
г. Желаемая (статическая) точность фиксации
d. Желаемая динамическая точность (перерегулирование)
e. Время, в течение которого динамическая точность возвращается к спецификации статической точности (время установления)
f. Требуемое разрешение шага (сочетание размера шага, зубчатой передачи и механической конструкции)
g. Системное трение: все механические системы обладают той или иной силой трения. При выборе двигателя помните, что двигатель должен обеспечивать достаточный крутящий момент, чтобы преодолеть любое трение в системе. Небольшое трение желательно, так как оно может сократить время стабилизации и повысить производительность
час.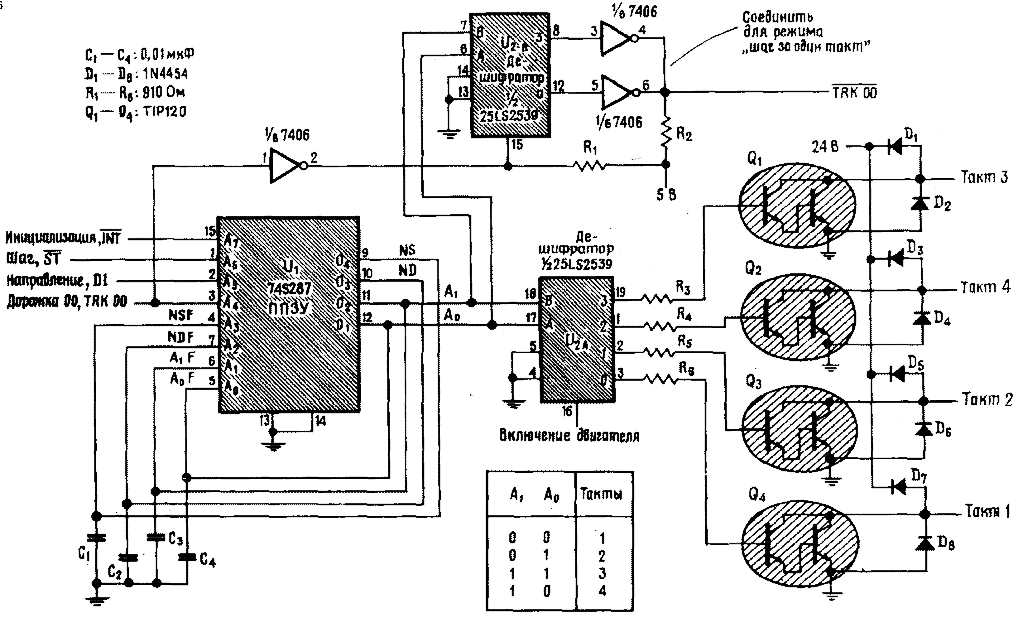 Инерция системы: инерция объекта является мерой его сопротивления изменениям скорости. Чем больше инерционная нагрузка, тем больше времени требуется шаговому двигателю для ускорения или замедления нагрузки. Скорость вращения двигателя не зависит от инерции. Для вращательного движения инерция пропорциональна массе перемещаемого объекта, умноженной на квадрат его расстояния от оси вращения
Инерция системы: инерция объекта является мерой его сопротивления изменениям скорости. Чем больше инерционная нагрузка, тем больше времени требуется шаговому двигателю для ускорения или замедления нагрузки. Скорость вращения двигателя не зависит от инерции. Для вращательного движения инерция пропорциональна массе перемещаемого объекта, умноженной на квадрат его расстояния от оси вращения
i. Характеристики скорости/крутящего момента двигателя: Крутящий момент (унции-дюйм) определяется как линейная сила (унции), умноженная на радиус (дюймы). При выборе шагового привода и двигателя мощность двигателя должна превышать общие требования нагрузки. Крутящий момент, который может обеспечить любой двигатель, зависит от его скорости. Индивидуальные кривые скорости/крутящего момента должны быть согласованы с проектировщиками для каждого приложения
Дж. Отношение крутящего момента к инерции: это значение определяется как номинальный крутящий момент двигателя, деленный на инерцию ротора.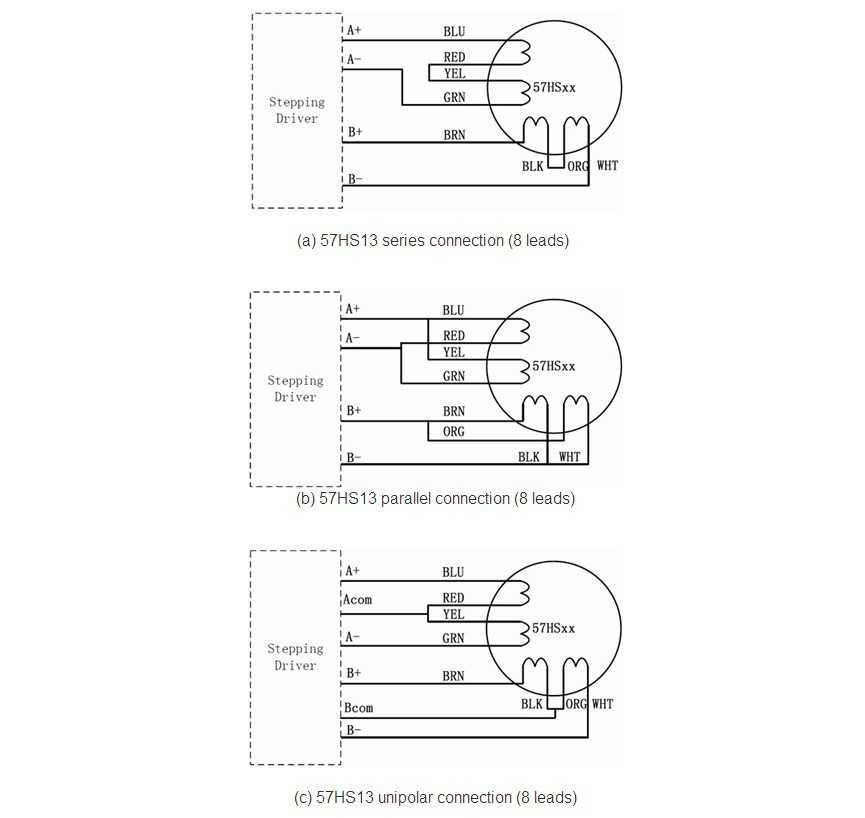 Это соотношение (измерение) определяет, насколько быстро двигатель может ускорять и замедлять собственную массу. Двигатели с одинаковым номинальным крутящим моментом могут иметь разное отношение крутящего момента к моменту инерции в результате различной конструкции
Это соотношение (измерение) определяет, насколько быстро двигатель может ускорять и замедлять собственную массу. Двигатели с одинаковым номинальным крутящим моментом могут иметь разное отношение крутящего момента к моменту инерции в результате различной конструкции
k. Запас по крутящему моменту: По возможности следует указывать драйвер шагового двигателя и контроллер, которые могут обеспечить больший крутящий момент, чем необходимо. Этот запас крутящего момента допускает механический износ, затвердевание смазки и другие непредвиденные трения. Эффекты резонанса могут привести к снижению крутящего момента двигателя на некоторых скоростях. Идеальным является выбор шагового привода и системы двигателей, которые обеспечивают как минимум 50-процентный запас по сравнению с минимальным требуемым крутящим моментом. Более 100% может оказаться слишком дорогостоящим.
2. Расчет: измерение инерции, трения и рабочих нагрузок, отражающихся на двигателе.
а. В системе привода с шаговым двигателем без обратной связи двигатель не «знает», привела ли чрезмерная инерция или трение к потере или увеличению скорости двигателя на один или несколько шагов, что влияет на точность позиционирования.
б. Инерция нагрузки должна быть ограничена не более чем четырехкратной инерцией ротора двигателя для высокопроизводительных (относительно быстрых) систем. Система с низкой производительностью может обеспечить точность шага при очень высоких инерционных нагрузках, иногда в десять раз превышающих инерцию ротора. Трение в системе может повысить производительность при высоких инерционных нагрузках.
Экспериментирование: адаптация
Экспериментирование для выбора двигателя имеет решающее значение из-за динамических изменений трения и инерции системы (аномалии нагрузки), которые трудно рассчитать. Эффекты резонанса шагового двигателя также могут изменяться, когда двигатель соединен с нагрузкой.
Формулы для шаговых драйверов и контроллеров
L/R Драйвер:
Уравнение драйвера L/R для расчета чувствительного резистора (RS):
ВС = Напряжение питания
VM = Напряжение двигателя
IO = Фазный ток шагового двигателя
Уравнение драйвера L/R для расчета номинальной мощности чувствительного резистора:
*Примечание: Номинальная мощность, полученная из этого уравнения, должна быть удвоена для чувствительного резистора.
Крутящий момент на микрошаг = Удерживающий момент двигателя X SIN (90°/микрошагов на шаг)
Индуктивная постоянная времени: τ = L / R
Преимущества драйвера и контроллера шагового двигателя
• Экономичность*
• Может быть достигнут широкий диапазон скоростей вращения, поскольку скорость пропорциональна частоте входных импульсов
• Высокая надежность
• Различные разрешения шага (более плавное движение с микрошагом)
*Драйверы и контроллеры шаговых двигателей различаются по стоимости в зависимости от критериев для каждого приложения. Некоторые критерии включают варианты углов шага 0,9 °, 1,8 °, 3,6 ° и 4,5 °, ток в диапазоне от 0,2 до 12,5 А и различные разрешения шага. Благодаря нашему дружелюбному обслуживанию клиентов и профессиональной поддержке приложений Anaheim Automation часто превосходит ожидания клиентов в отношении выполнения конкретных требований к шаговым драйверам и двигателям, а также других потребностей в управлении движением.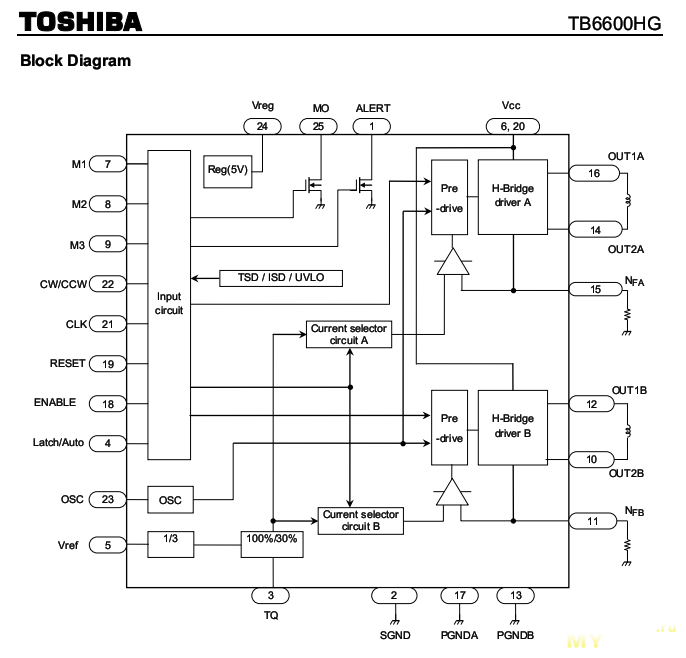
Недостатки драйвера шагового двигателя
• Отсутствие обратной связи для индикации пропущенных шагов (если не используется энкодер)
• Невозможно очень быстро разогнать нагрузку
• Низкая выходная мощность для размера и веса
Драйвер шагового двигателя и приложения контроллера
Anaheim Automation Линейки экономичных шаговых двигателей, драйверов и контроллеров являются разумным выбором как для OEM-производителей, так и для пользователей. Клиенты Anaheim Automation в отношении линейки шаговых двигателей, драйверов и контроллеров разнообразны: промышленные компании, эксплуатирующие или разрабатывающие автоматизированное оборудование или процессы, связанные с упаковкой продуктов питания, косметики или медицинских изделий, требованиями к маркировке или защите от несанкционированного доступа, отрезками по размеру, сборкой, конвейер, погрузочно-разгрузочные работы, робототехника, спецэффекты для киносъемки и проекции, медицинская диагностика, устройства контроля и безопасности, управление потоком насосов, изготовление металлов (машины с ЧПУ) и модернизация оборудования.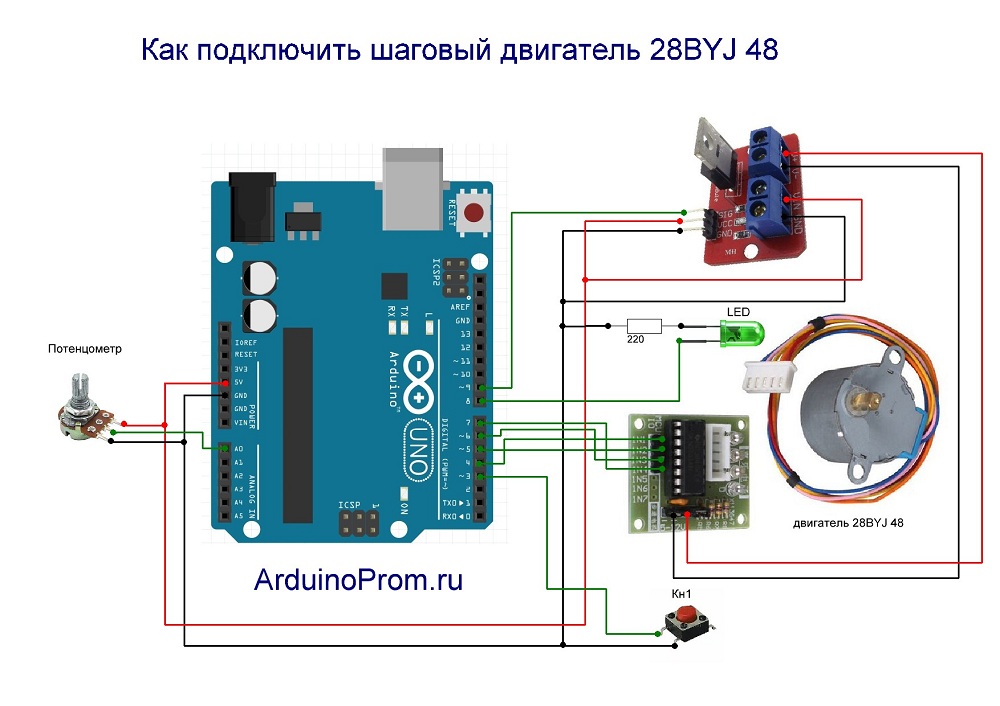 Шаговый двигатель, драйвер и контроллер чаще всего используются в системах управления движением, требующих управления положением.
Шаговый двигатель, драйвер и контроллер чаще всего используются в системах управления движением, требующих управления положением.
Anaheim Automation также предлагает линейку шаговых драйверов и контроллеров, в которых согласованный шаговый двигатель объединен в один простой блок. Эта концепция дизайна упрощает выбор, сокращая тем самым количество ошибок и время подключения. Благодаря дружелюбному обслуживанию клиентов и профессиональной поддержке приложений Anaheim Automation часто превосходит ожидания клиентов в отношении выполнения конкретных требований к шаговым двигателям, драйверам и контроллерам, а также других потребностей в управлении движением.
ПРИМЕЧАНИЕ: Техническая помощь по линейке шаговых драйверов и контроллеров предоставляется бесплатно. Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Однако любой выбор, ценовое предложение или предложение по применению драйвера шагового двигателя и контроллера или любого другого продукта, предлагаемые персоналом Anaheim Automation, ее представителями или дистрибьюторами, предназначены только для помощи покупателю. Во всех случаях определение пригодности драйвера шагового двигателя и контроллера для конкретного системного применения является исключительно ответственностью заказчика. Несмотря на то, что прилагаются все усилия, чтобы дать надежные рекомендации относительно драйвера шагового двигателя и контроллера в конкретном приложении, а также для точного предоставления технических данных и иллюстраций, такие рекомендации и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Во всех случаях определение пригодности драйвера шагового двигателя и контроллера для конкретного системного применения является исключительно ответственностью заказчика. Несмотря на то, что прилагаются все усилия, чтобы дать надежные рекомендации относительно драйвера шагового двигателя и контроллера в конкретном приложении, а также для точного предоставления технических данных и иллюстраций, такие рекомендации и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Anaheim Automation ни при каких обстоятельствах не несет ответственности за косвенный или последующий ущерб, возникший в результате использования или применения драйвера и контроллера шагового двигателя. Неправильное использование шагового драйвера и контроллера в приложении может привести к травмам или смерти, повреждению имущества и/или экономическим потерям.
Драйверы и контроллеры шаговых двигателей используются во многих отраслях промышленности
Драйверы и контроллеры шаговых двигателей стали важным компонентом приложений во многих различных отраслях промышленности. Ниже приведен список отраслей, в которых используются шаговые драйверы и контроллеры:
Ниже приведен список отраслей, в которых используются шаговые драйверы и контроллеры:
• Самолет — В авиационной промышленности шаговые двигатели, драйверы и контроллеры используются в авиационных приборах, антеннах и датчиках, а также в сканирующем оборудовании
• Автомобильная промышленность — В автомобильной промышленности шаговые двигатели, драйверы и контроллеры используются о круиз-контроле, датчиках и камерах.
• Химическая промышленность – В химической промышленности используются шаговые двигатели, драйверы и контроллеры для смешивания и отбора проб материалов. Они также используют контроллеры шаговых двигателей с одно- и многоосевыми шаговыми двигателями для тестирования оборудования 9.1231 • Бытовая электроника и офисное оборудование – В отрасли бытовой электроники шаговые двигатели, драйверы и контроллеры используются в офисном оборудовании, например, в сканирующем оборудовании на базе ПК, накопителях данных, механизмах привода оптических дисков, принтерах и сканерах
• Industrial – В промышленности шаговые двигатели используются в автомобильных датчиках, станках с одно- и многоосевыми драйверами и контроллерами шаговых двигателей, а также в комплектах для модернизации. Драйверы и контроллеры шаговых двигателей также можно найти в системе управления станком с ЧПУ 9.1231 • Medical – В медицинской промышленности шаговые драйверы и контроллеры используются в медицинских сканерах, микроскопическом или наноскопическом управлении движением автоматизированных устройств, дозирующих насосах и автоинжекторах хроматографов.
Драйверы и контроллеры шаговых двигателей также можно найти в системе управления станком с ЧПУ 9.1231 • Medical – В медицинской промышленности шаговые драйверы и контроллеры используются в медицинских сканерах, микроскопическом или наноскопическом управлении движением автоматизированных устройств, дозирующих насосах и автоинжекторах хроматографов.
• Научные инструменты – Научное оборудование включает шаговые драйверы и контроллеры для позиционирования шаговых двигателей в телескопе обсерватории.
Драйвер шагового двигателя и контроллер. Вопросы окружающей среды
На всех этапах эксплуатации, обслуживания и ремонта драйвера шагового двигателя и системы контроллера необходимо соблюдать следующие требования по охране окружающей среды и технике безопасности. Несоблюдение этих мер предосторожности нарушает стандарты безопасности проектирования, изготовления и предполагаемого использования шагового двигателя, драйвера и контроллера. Обратите внимание, что даже хорошо сконструированные шаговые драйверы и контроллеры при неправильной эксплуатации и установке могут быть опасными. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. Клиент несет полную ответственность за правильный выбор, установку и эксплуатацию шагового двигателя, драйвера и контроллера.
Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. Клиент несет полную ответственность за правильный выбор, установку и эксплуатацию шагового двигателя, драйвера и контроллера.
Атмосфера, в которой используются драйвер шагового двигателя и контроллер, должна способствовать общепринятым правилам обращения с электрическим/электронным оборудованием. Не используйте драйвер шагового двигателя и контроллер в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании на открытом воздухе шаговый двигатель, драйвер и контроллер должны быть защищены от непогоды соответствующим кожухом, но при этом должен быть обеспечен достаточный поток воздуха и охлаждение. Влага может привести к поражению электрическим током и/или поломке системы. Должное внимание следует уделять избеганию жидкостей и паров любого рода. Свяжитесь с заводом-изготовителем, если для вашего приложения требуются определенные рейтинги IP. Целесообразно устанавливать шаговый двигатель, драйвер и контроллер в среде, свободной от конденсата, электрических помех, вибрации и ударов.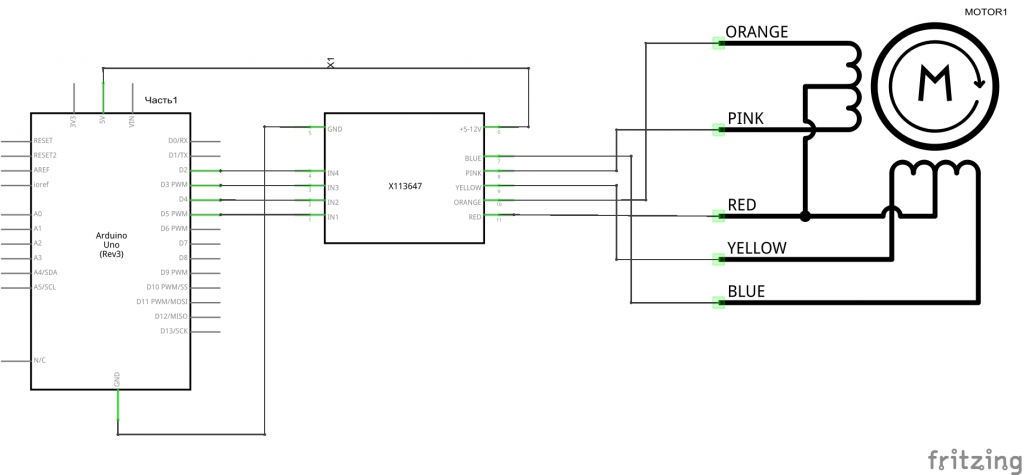
Кроме того, предпочтительнее работать с системой драйвера/двигателя/контроллера шагового двигателя в нестатической защитной среде. Открытые схемы всегда должны быть должным образом ограждены и/или закрыты, чтобы предотвратить несанкционированный контакт человека с цепями под напряжением. Никакая работа не должна выполняться, пока на шаговый драйвер подается питание. Не подключайте и не отключайте разъемы при включенном питании. Подождите не менее 5 минут, прежде чем проводить осмотр шагового двигателя, драйвера и контроллера после отключения питания, потому что даже после отключения питания в конденсаторах внутренней цепи шагового двигателя все еще остается некоторая электрическая энергия. Водитель.
Планируйте установку шагового двигателя, драйвера и контроллера таким образом, чтобы конструкция системы была свободна от мусора, такого как металлические частицы от резки, сверления, нарезания резьбы и сварки, или любые другие посторонние материалы, которые могут соприкасаться с схемой.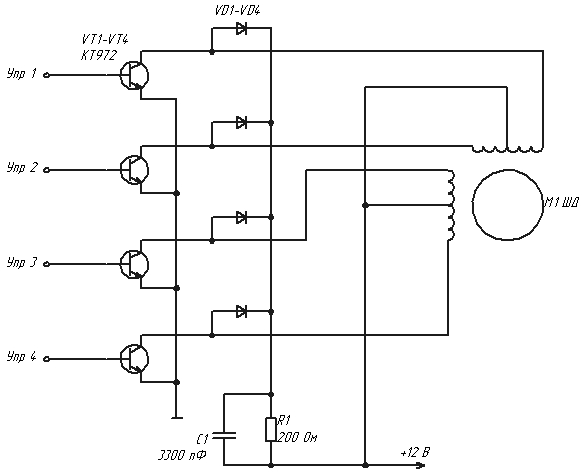 Если не предотвратить попадание мусора в шаговый двигатель, драйвер и систему контроллера, это может привести к повреждению и/или поражению электрическим током.
Если не предотвратить попадание мусора в шаговый двигатель, драйвер и систему контроллера, это может привести к повреждению и/или поражению электрическим током.
Монтаж драйвера шагового двигателя и контроллера
Введение
Правильная установка позволит добиться наилучших результатов от производственных возможностей системы драйвера шагового двигателя и контроллера. Это может быть достигнуто только в том случае, если будут реализованы несколько важных шагов и приняты некоторые меры предосторожности. Примечание: Местные нормы могут предполагать различные требования, но требования, приведенные в этом разделе, должны быть максимально удовлетворены.
Безопасность превыше всего!
Безопасность человека и безопасность оборудования должны быть в первую очередь при выполнении процедур установки драйвера шагового двигателя и системы контроллера.
ВНИМАНИЕ! Только квалифицированный персонал должен иметь право открывать и работать с драйвером и контроллером шагового двигателя, двигателем и другими компонентами внутри электрических шкафов.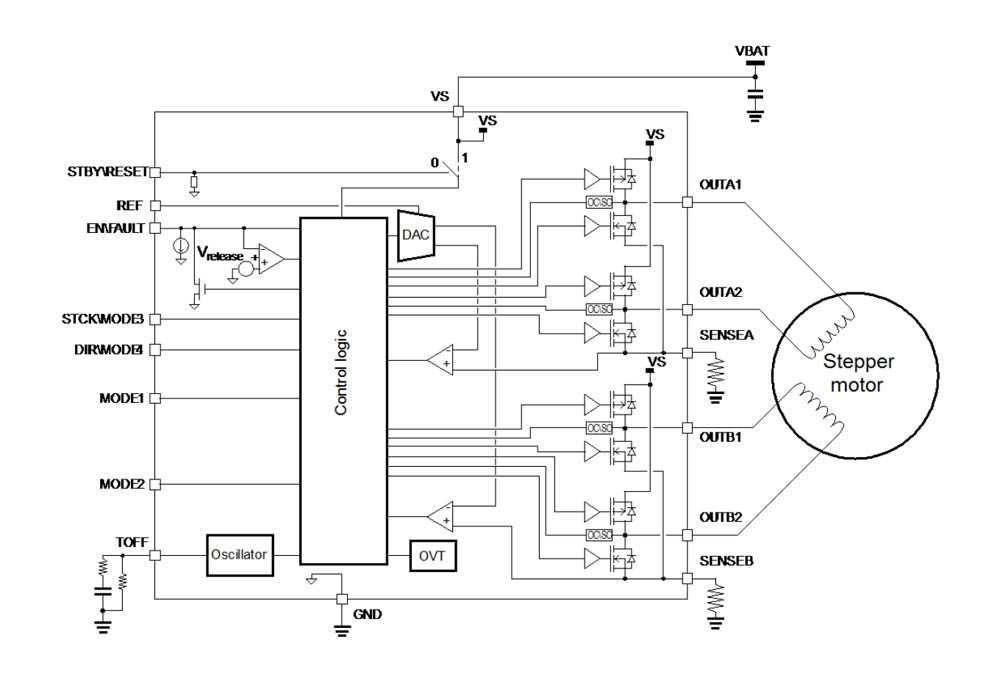
Запрещается запускать оборудование и механизмы, если дверца электрического шкафа не закрыта и не заперта.
Электроника внутри основного электрического корпуса чувствительна к металлической стружке и опилкам. Во время установки и использования драйвера шагового двигателя и системы контроллера необходимо соблюдать особую осторожность, чтобы металлическая стружка или опилки не могли упасть на какие-либо электрические устройства или попасть внутрь них.
Электрический монтаж
Безопасность является первоочередной задачей при выполнении электрического соединения шагового привода и системы контроллера, а также всех продуктов управления движением и электрического оборудования. Поэтому проверяйте каждый шаг хотя бы один раз после того, как он был сделан. Во время установки драйвера шагового двигателя и системы контроллера важно свести к минимуму возможность проникновения электрических помех в критические чувствительные цепи. Этого лучше всего добиться, точно следуя процедурам электромонтажа.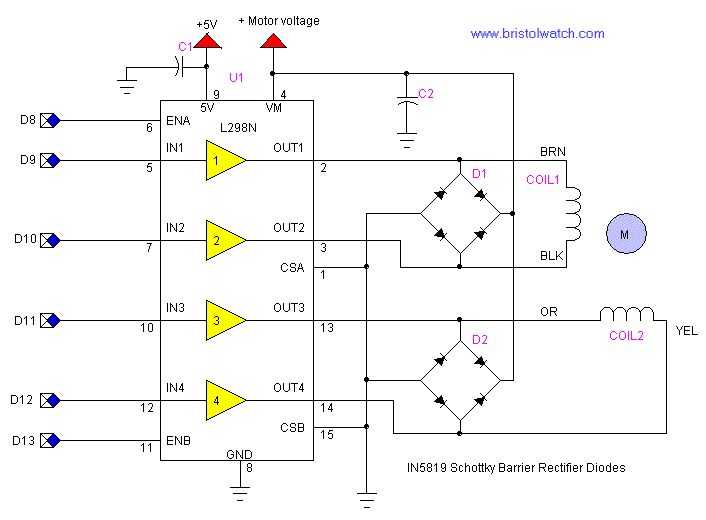 Значительное внимание уделялось помехозащищенности при разработке и производстве шагового двигателя, шагового драйвера и контроллера. Однако при установке драйвера и контроллера шагового двигателя на вашем станке или в вашем учреждении необходимо проявлять большую осторожность и внимание.
Значительное внимание уделялось помехозащищенности при разработке и производстве шагового двигателя, шагового драйвера и контроллера. Однако при установке драйвера и контроллера шагового двигателя на вашем станке или в вашем учреждении необходимо проявлять большую осторожность и внимание.
Заблаговременное планирование
Прежде чем приступать к электромонтажным работам, соберите все имеющиеся у вас чертежи, инструкции или технологические документы по шаговому двигателю, шаговому драйверу и контроллеру, а также другим компонентам вашей системы. Чтение и изучение документации по шаговому двигателю, шаговому драйверу и контроллеру перед началом проекта предупредит вас о любых особых ситуациях, таких как необходимость в определенных инструментах. Кроме того, вы будете знать, с чего начать и куда двигаться дальше. Во время установки всегда держите при себе документацию по конкретному шаговому двигателю, драйверу шагового двигателя и контроллеру, так как вам следует регулярно обращаться к ним. Документация производителей драйверов и контроллеров двигателей и шаговых двигателей будет сильно различаться, поскольку их конструкции, компоновки и соединения не будут одинаковыми. Внимательно сопоставьте номера деталей шагового двигателя, шагового драйвера и контроллера с документацией перед попыткой установки. Убедитесь, что шаговый двигатель, драйвер и контроллер шагового двигателя совместимы. Даже опытные профессионалы нуждаются в руководстве и совете при выполнении сложных электромонтажных работ. Это гарантирует самые безопасные результаты для всех.
Документация производителей драйверов и контроллеров двигателей и шаговых двигателей будет сильно различаться, поскольку их конструкции, компоновки и соединения не будут одинаковыми. Внимательно сопоставьте номера деталей шагового двигателя, шагового драйвера и контроллера с документацией перед попыткой установки. Убедитесь, что шаговый двигатель, драйвер и контроллер шагового двигателя совместимы. Даже опытные профессионалы нуждаются в руководстве и совете при выполнении сложных электромонтажных работ. Это гарантирует самые безопасные результаты для всех.
Общий контрольный список электробезопасности
Когда дело доходит до электроники на заводе или на рабочем месте, убедитесь, что и объект, и сотрудники в нем всегда в безопасности. Вот контрольный список по электробезопасности, любезно предоставленный Национальным фондом электробезопасности:
Шнуры и кабели: Убедитесь, что шнуры и кабели в хорошем состоянии. Проверьте шнуры, кабели и другую проводку на предмет износа и трещин.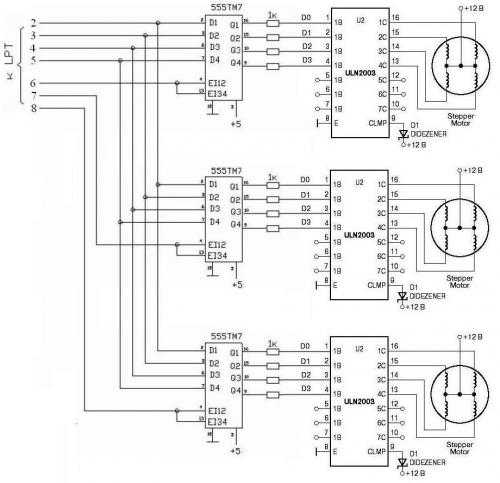 Убедитесь, что вся проводка и кабели расположены вне зоны досягаемости и движения транспорта. Шнуры и кабели никогда не должны быть прибиты гвоздями или скобами к стене, плинтусу или другому объекту. Не размещайте шнуры под коврами или ковриками. Anaheim Automation рекомендует использовать кабели для конкретных продуктов для своих шаговых двигателей, драйверов шаговых двигателей и контроллеров, а также линеек продуктов PCL, PLC и HMI. Следует проявлять крайнюю осторожность, если установщик решит использовать собственную кабельную систему.
Убедитесь, что вся проводка и кабели расположены вне зоны досягаемости и движения транспорта. Шнуры и кабели никогда не должны быть прибиты гвоздями или скобами к стене, плинтусу или другому объекту. Не размещайте шнуры под коврами или ковриками. Anaheim Automation рекомендует использовать кабели для конкретных продуктов для своих шаговых двигателей, драйверов шаговых двигателей и контроллеров, а также линеек продуктов PCL, PLC и HMI. Следует проявлять крайнюю осторожность, если установщик решит использовать собственную кабельную систему.
Электрические вилки и клеммы: Убедитесь, что все вилки подходят к розеткам. Убедитесь, что клеммы драйвера шагового двигателя и контроллера правильно согласованы и плотно прилегают. Никогда не удаляйте заземляющий контакт (третий штырь), чтобы сделать трехштырьковый контакт двухпроводной розеткой, так как это может привести к поражению электрическим током. Не перегружайте розетки слишком большим количеством электронных компонентов. Никогда не втыкайте вилку в розетку силой, если она не подходит, и никогда не модифицируйте клеммные колодки или кабели для драйвера шагового двигателя и контроллера.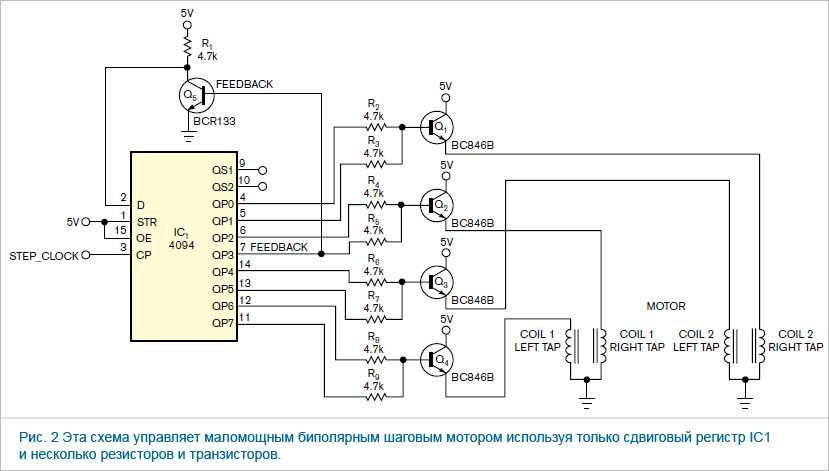
Компьютер, контроллер, ЧМИ, ПЛК и привод Продукты: Убедитесь, что оборудование находится в хорошем состоянии и работает правильно. Ищите трещины или повреждения в проводке, клеммах, вилках и разъемах. Используйте устройство защиты от перенапряжения с печатью признанного на национальном уровне агентства по сертификации.
Молния: Во время грозы обязательно используйте устройства защиты от перенапряжения на электронных устройствах.
Следующая информация предназначена в качестве общего руководства по установке и монтажу шагового двигателя, драйвера и контроллера.
ПРЕДУПРЕЖДЕНИЕ — В системе шагового двигателя, драйвера и контроллера может присутствовать опасное напряжение, способное привести к травме или смерти. Будьте предельно осторожны при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. Очень важно учитывать проводку шагового двигателя, драйвера и контроллера при установке и монтаже.
Субпанели, установленные внутри корпуса для монтажа шагового двигателя, драйвера и компонентов системы контроллера, должны иметь плоскую жесткую поверхность, защищенную от ударов, вибрации, влаги, масла, паров или пыли. Помните, что шаговый двигатель, драйвер и контроллер во время работы выделяют тепло; поэтому при проектировании компоновки системы следует учитывать рассеивание тепла. Размер корпуса должен быть таким, чтобы не превышалась максимальная номинальная температура окружающей среды. Рекомендуется, чтобы драйвер шагового двигателя и контроллер устанавливались в положении, обеспечивающем достаточный поток воздуха. Шаговый двигатель, драйвер и контроллер должны быть установлены устойчиво и надежно.
ПРИМЕЧАНИЕ: Расстояние между шаговым двигателем, драйвером и контроллером, а также любыми другими устройствами, установленными в системе/электрической панели или шкафу, должно быть не менее 10 мм.
ПРИМЕЧАНИЕ: Для того, чтобы соответствовать требованиям UL и CE, шаговый двигатель, драйвер и контроллер должны быть заземлены в заземленном токопроводящем корпусе, обеспечивающем защиту в соответствии со стандартом EN 60529 (IEC 529) до IP55, чтобы они недоступны для оператора или неквалифицированного лица.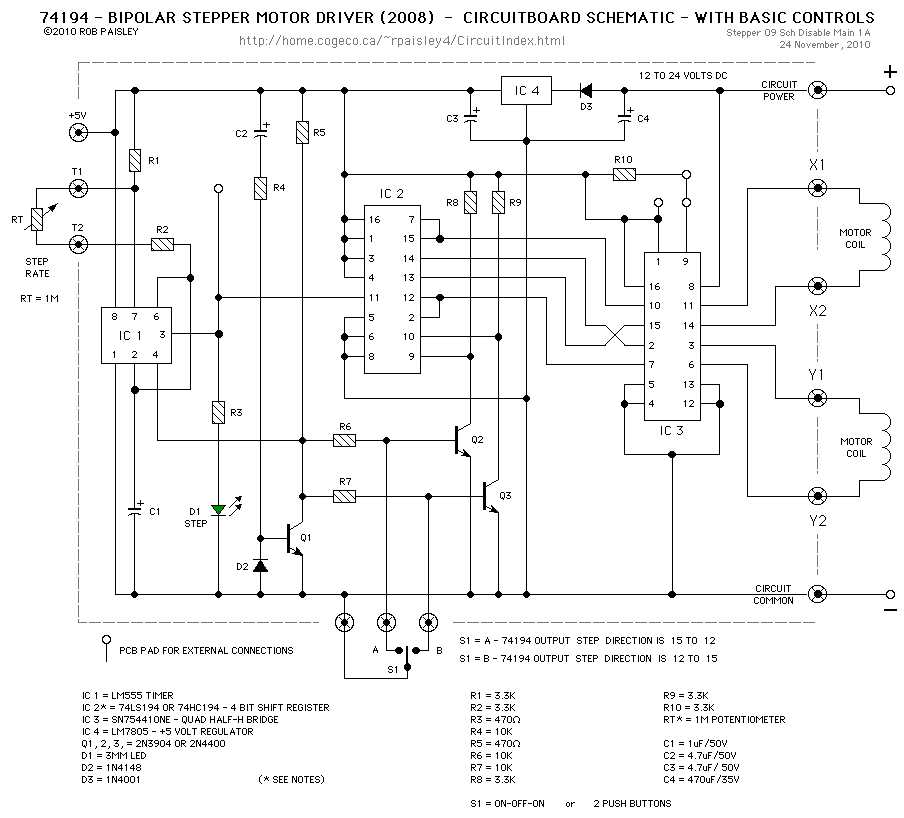 Как и любую движущуюся часть системы, шаговый двигатель следует держать вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая защиту до IP66. Чтобы улучшить сцепление между силовой шиной и субпанелью, изготовьте субпанель из оцинкованной (неокрашиваемой) стали. Кроме того, настоятельно рекомендуется защитить драйвер шагового двигателя и контроллер от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Как и любую движущуюся часть системы, шаговый двигатель следует держать вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая защиту до IP66. Чтобы улучшить сцепление между силовой шиной и субпанелью, изготовьте субпанель из оцинкованной (неокрашиваемой) стали. Кроме того, настоятельно рекомендуется защитить драйвер шагового двигателя и контроллер от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Линейка шаговых драйверов и контроллеров Anaheim Automation
Линейка драйверов и контроллеров шаговых двигателей Anaheim Automation предлагается с различными напряжениями, токами и шагами на оборот. Клиенты впечатлены конструкциями Anaheim Automation, поскольку они обеспечивают выдающуюся производительность двигателя. Предлагая высокопроизводительные двухуровневые (полушаговые), микрошаговые и линейные конструкции, Anaheim Automation предлагает наиболее подходящий шаговый драйвер и контроллер для ваших требований к автоматизации. Принимая во внимание бюджет на проектирование системы, Anaheim Automation производит драйверы шаговых двигателей и контроллеры в нескольких стилях упаковки, что делает их наиболее экономичным выбором в отрасли!
Принимая во внимание бюджет на проектирование системы, Anaheim Automation производит драйверы шаговых двигателей и контроллеры в нескольких стилях упаковки, что делает их наиболее экономичным выбором в отрасли!
Линейка шаговых драйверов и контроллеров предлагает продукты, которые доступны с тремя различными входами (в зависимости от модели): вход 110 В переменного тока или 220 В переменного тока, вход постоянного тока и вход переменного тока (с трансформатором). Anaheim Automation производит большое разнообразие комплектов драйверов шаговых двигателей для клиентов, которым требуется входное напряжение 110 или 220 В переменного тока. Эти устройства содержат драйвер шагового двигателя или несколько драйверов шагового двигателя с согласованным источником питания и размещаются на шасси с открытой рамой или в корпусе. Доступны в одно-, двух-, трех- или четырехосевой конфигурации, с двухуровневым или микрошаговым драйвером(ами) в диапазоне тока от 0,5 до 12,5 А, с мощностью источника питания до 800 Вт (в зависимости от модели).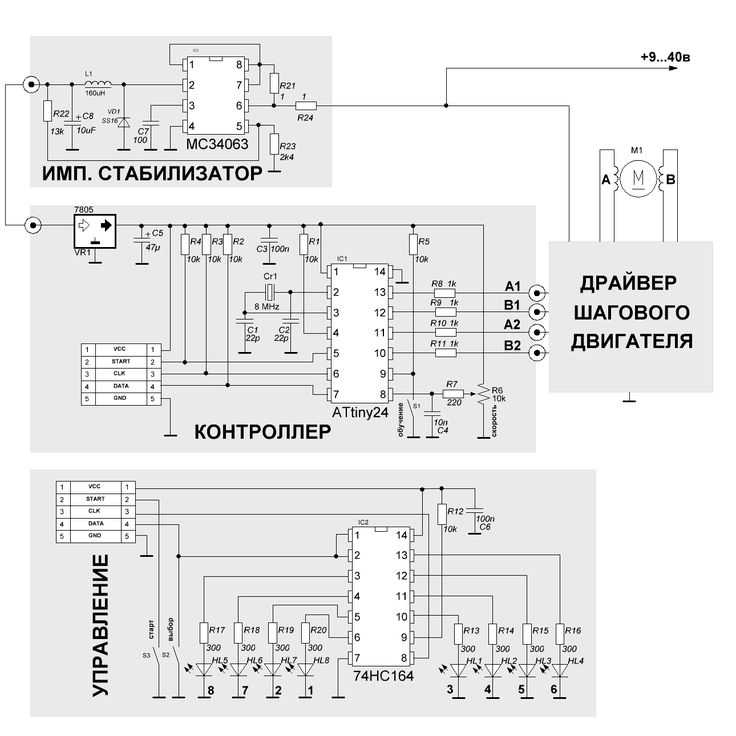 В этот продукт также включен драйвер шагового двигателя на 10 ампер с питанием от сети. Наиболее популярными и, как правило, постоянно присутствующими на складе являются шаговый драйвер MLA10641 и пакеты драйверов для шагового двигателя DPS32001, DPD72001XCE и DPY50001.
В этот продукт также включен драйвер шагового двигателя на 10 ампер с питанием от сети. Наиболее популярными и, как правило, постоянно присутствующими на складе являются шаговый драйвер MLA10641 и пакеты драйверов для шагового двигателя DPS32001, DPD72001XCE и DPY50001.
В линейке шаговых драйверов с входным напряжением 110 В переменного тока и 220 В переменного тока можно выбрать один из двух диапазонов тока: 2,6–7,0 А и 7,1–12,5 А. Anaheim Automation производит большое разнообразие пакетов драйверов шаговых двигателей для клиентов, которым требуется входное напряжение 110 В переменного тока или 220 В переменного тока. Этот блок содержит драйвер шагового двигателя с соответствующим блоком питания и упакован в корпус. Доступны в одно-, двух-, трех- или четырехосевой конфигурации, с двухуровневым или микрошаговым драйвером шагового двигателя в диапазоне токов от 0,5 до 12,5 А, с мощностью блока питания до 800 Вт. Также в этот продукт входит шаговый драйвер на 10 ампер с питанием от сети.
Драйвер шагового двигателя может быть изготовлен компанией Anaheim Automation для различных приложений, требующих входа постоянного тока. Эта линейка шаговых приводов предлагается в виде одноосевых блоков в открытой раме и в закрытом модульном корпусе из листового металла. Доступны двухуровневые, микрошаговые и приводы L/R, что делает их совместимыми с широким спектром шаговых двигателей. Наиболее популярны шаговые драйверы MBC15081, MBC25081TB, MBC05641, MBC12101 и MBC082561, которые, как правило, всегда есть на складе. Если в приложении требуется компактный шаговый драйвер для небольшого шагового двигателя в диапазоне 0–2,5 А, рассмотрите модели шаговых драйверов, такие как MBC158, MBC15081, MBC25081 и MBC25081TB. Эта серия шаговых драйверов использует технологию микрошагового привода. Все, кроме драйвера шагового двигателя MBC15181, собраны в небольшом корпусе из листового металла. Недорогая модель шагового драйвера MBC15181 выполнена в стиле печатной платы.
Если для приложения требуется драйвер шагового двигателя в диапазоне 2,6–7,0 А, обратите внимание на модели MBC05641, MBL536, MBL600, M6R7 и MBD45021-75.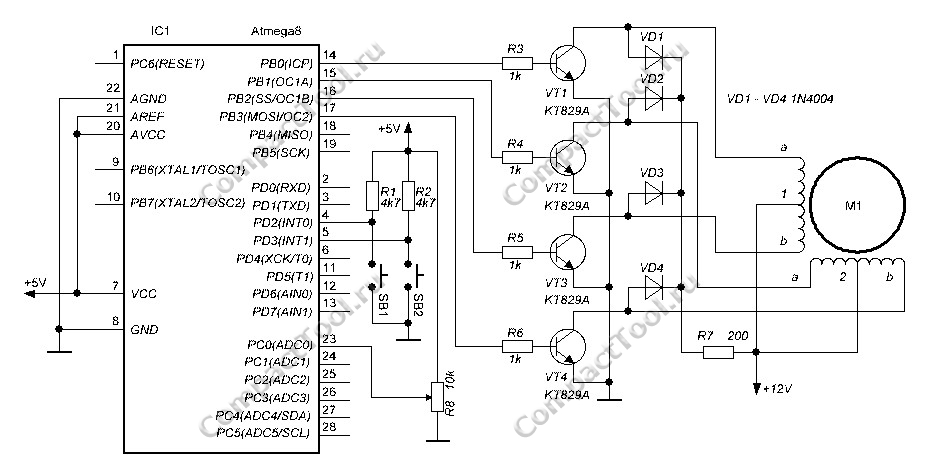 Драйверы шаговых двигателей этой серии являются модульными, то есть они собраны в небольших корпусах из листового металла. В этой серии представлен популярный микрошаговый драйвер шагового двигателя 1-5 А с делением на 64 модели MBC05641. Также предлагаются двухуровневые драйверы шаговых двигателей, такие как MBL536, MBL600 и драйверы L/R-типа, модель M6R7, которые являются нашими старыми «устаревшими» продуктами. MBD45021-75 — это специализированный драйвер шагового двигателя, отмеченный наградами, специально разработанный для значительного увеличения выходного крутящего момента/скорости в системах с напряжением от 24 до 40 вольт.
Драйверы шаговых двигателей этой серии являются модульными, то есть они собраны в небольших корпусах из листового металла. В этой серии представлен популярный микрошаговый драйвер шагового двигателя 1-5 А с делением на 64 модели MBC05641. Также предлагаются двухуровневые драйверы шаговых двигателей, такие как MBL536, MBL600 и драйверы L/R-типа, модель M6R7, которые являются нашими старыми «устаревшими» продуктами. MBD45021-75 — это специализированный драйвер шагового двигателя, отмеченный наградами, специально разработанный для значительного увеличения выходного крутящего момента/скорости в системах с напряжением от 24 до 40 вольт.
Anaheim Automation предлагает экономичный шаговый драйвер, предназначенный для работы с широким спектром шаговых двигателей. Если приложению требуется драйвер шагового двигателя в диапазоне 7,1–12,5 А, обратите внимание на модели драйверов шагового двигателя MBC12101, MBC082561 и BLHP101. Драйвер шагового двигателя MBC12101 представляет собой микрошаговый драйвер с фиксированным делением на 10 и выходной мощностью от 1,5 до 10 ампер.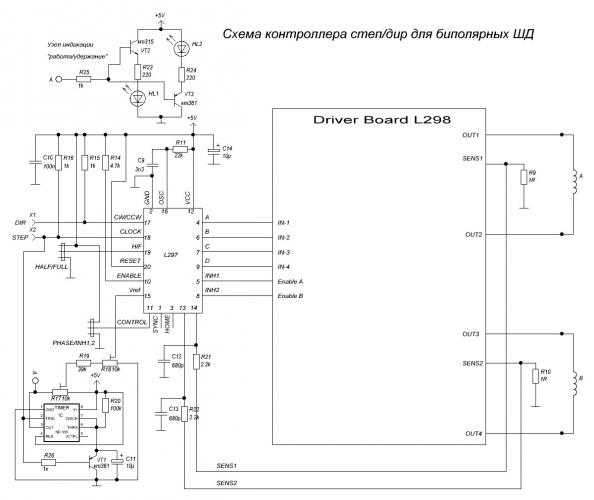 Драйвер шагового двигателя MBC082561 использует выбираемые делители до 256, что позволяет использовать очень широкий диапазон вариантов микрошага. Более старый «устаревший» высокопроизводительный двухуровневый драйвер шагового двигателя, модель BLHP101, представляет собой продукт на уровне платы, который чаще используется в электрических панелях или других подобных корпусах.
Драйвер шагового двигателя MBC082561 использует выбираемые делители до 256, что позволяет использовать очень широкий диапазон вариантов микрошага. Более старый «устаревший» высокопроизводительный двухуровневый драйвер шагового двигателя, модель BLHP101, представляет собой продукт на уровне платы, который чаще используется в электрических панелях или других подобных корпусах.
Драйвер шагового двигателя производства Anaheim Automation также доступен для приложений, требующих входа переменного тока. Для этих моделей драйверов шаговых двигателей требуется трансформатор (приобретается отдельно), и они доступны в виде печатной платы и модульных драйверов шаговых двигателей. Предлагаемые в двух диапазонах тока от 2,6 до 7,0 А и от 7,1 до 12,5 А, эти модели шаговых драйверов совместимы с широким диапазоном шаговых двигателей с 4, 6 и 8 выводами. В некоторых моделях используется технология двухуровневого привода, которая не создает электромагнитных помех, радиочастотных помех и нагрева двигателя, характерного для шагового привода с прерывателем.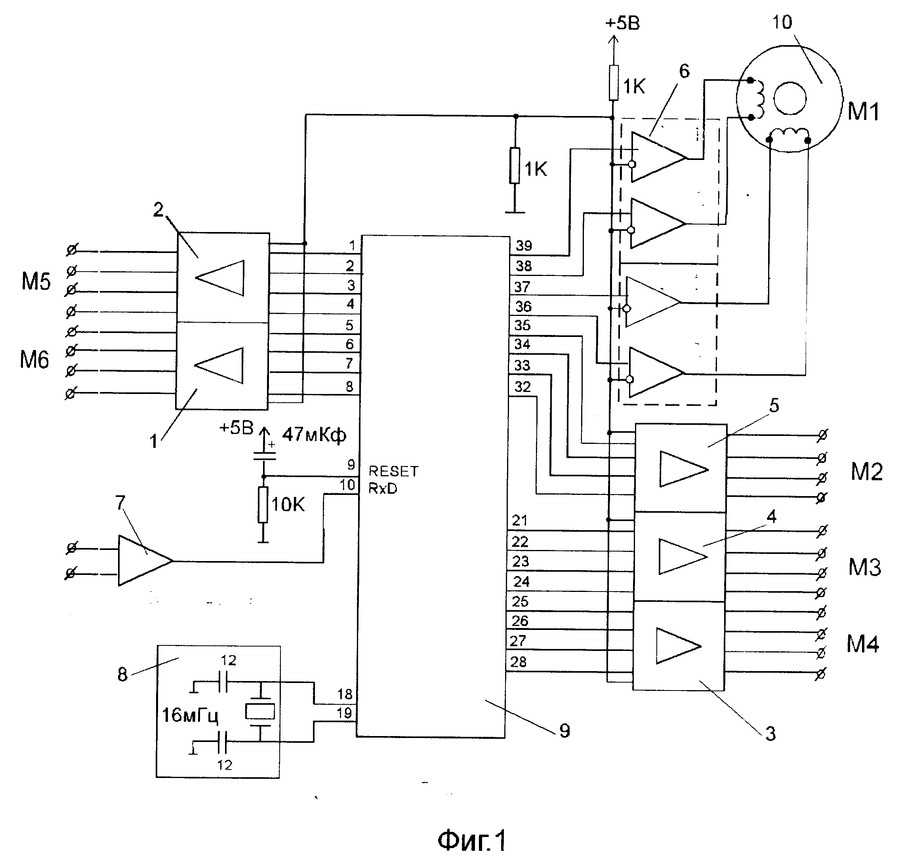 Также в этой линейке продуктов есть популярный микрошаговый драйвер MBC10641, который предлагает восемь выбираемых делителей: 1, 2, 5, 8, 10, 16, 32 и 64. Наиболее популярными и обычно всегда на складе являются BLD75- 1, модели драйверов шаговых двигателей TM4500 и MBC10641.
Также в этой линейке продуктов есть популярный микрошаговый драйвер MBC10641, который предлагает восемь выбираемых делителей: 1, 2, 5, 8, 10, 16, 32 и 64. Наиболее популярными и обычно всегда на складе являются BLD75- 1, модели драйверов шаговых двигателей TM4500 и MBC10641.
Anaheim Automation производит различные модели драйверов шаговых двигателей для клиентов, которым требуются входы переменного тока, в диапазоне тока 2,6–7,0 А. Экономичные серии драйверов шаговых двигателей TM4500 и TM4500-80 на уровне платы имеют выходную мощность от 1 до 4,5 А. TM4500-80 удваивает напряжения, тем самым обеспечивая лучшую производительность в более высоких диапазонах скоростей. Очень популярная серия драйверов шаговых двигателей BLD76-1 имеет выходную мощность от 1 до 7 А и подходит для широкого спектра шаговых двигателей. В BLD76-1 используется технология двухуровневого привода, поэтому он не создает электромагнитных помех, радиочастотных помех или нагрева двигателя, характерных для драйвера шагового двигателя с прерывателем.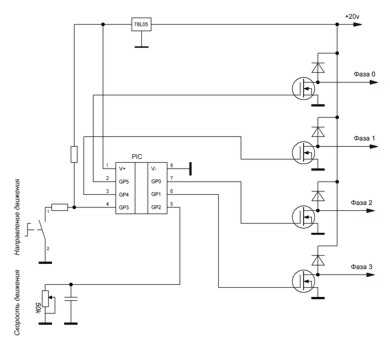 Для этих серий шаговых драйверов требуется трансформатор, который приобретается отдельно. Кроме того, популярный и экономичный драйвер шагового двигателя MBC10641 от Anaheim Automation идеально подходит для заказчиков, которым требуются входы переменного тока, работающие в диапазоне токов от 1,5 до 10 ампер. Для этого одноосевого драйвера шагового микрошага требуется трансформатор, который приобретается отдельно. Драйвер шагового двигателя MBC10641 предлагает восемь выбираемых делителей: 1, 2, 5, 8, 10, 16, 32 и 64. Он совместим с широким диапазоном шаговых двигателей с 4, 6 и 8 выводами.
Для этих серий шаговых драйверов требуется трансформатор, который приобретается отдельно. Кроме того, популярный и экономичный драйвер шагового двигателя MBC10641 от Anaheim Automation идеально подходит для заказчиков, которым требуются входы переменного тока, работающие в диапазоне токов от 1,5 до 10 ампер. Для этого одноосевого драйвера шагового микрошага требуется трансформатор, который приобретается отдельно. Драйвер шагового двигателя MBC10641 предлагает восемь выбираемых делителей: 1, 2, 5, 8, 10, 16, 32 и 64. Он совместим с широким диапазоном шаговых двигателей с 4, 6 и 8 выводами.
Обратите внимание: Если вы ищете подходящие компоненты для вашего шагового драйвера и системы контроллера, обратите внимание на интегрированные модели шагового драйвера/двигателя/контроллера Anaheim Automation или пакеты драйверов шагового двигателя.
Проводка драйвера шагового двигателя и контроллера
Следующая информация предназначена в качестве общего руководства по подключению линеек шагового двигателя, драйвера и контроллера Anaheim Automation.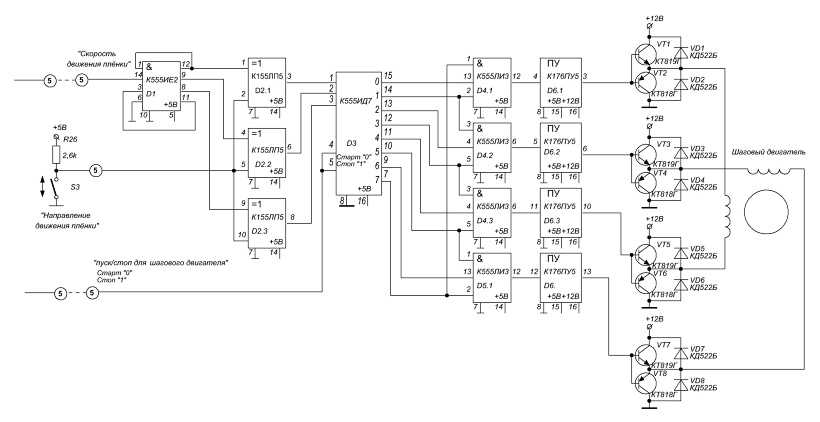 Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе шумы, излучаемые близлежащими реле, трансформаторами и другими электронными устройствами, могут попасть в шаговый двигатель, драйвер и контроллер, сигналы энкодера, входные/выходные коммуникации и другие устройства. чувствительные низковольтные сигналы. Это может привести к системным сбоям и ошибкам связи.
Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе шумы, излучаемые близлежащими реле, трансформаторами и другими электронными устройствами, могут попасть в шаговый двигатель, драйвер и контроллер, сигналы энкодера, входные/выходные коммуникации и другие устройства. чувствительные низковольтные сигналы. Это может привести к системным сбоям и ошибкам связи.
ПРЕДУПРЕЖДЕНИЕ — В системе шагового двигателя, драйвера и контроллера могут присутствовать опасные напряжения, способные привести к травмам или смерти. Будьте предельно осторожны при обращении, подключении, тестировании и регулировке во время установки, настройки и эксплуатации. Не вносите чрезмерных настроек или изменений в параметры системы шагового двигателя, драйвера и контроллера, поскольку это может вызвать механическую вибрацию и привести к отказу и/или потере данных. После того, как шаговый двигатель, драйвер и контроллер подключены, не запускайте драйвер и контроллер шагового двигателя путем прямого включения/выключения источника питания. Частое включение/выключение питания приведет к быстрому старению внутренних компонентов, что сократит срок службы драйвера шагового двигателя и системы контроллера.
Частое включение/выключение питания приведет к быстрому старению внутренних компонентов, что сократит срок службы драйвера шагового двигателя и системы контроллера.
Строго соблюдайте следующие правила:
• Следуйте электрической схеме для каждой комбинации шагового двигателя, драйвера и контроллера.
ПРИМЕЧАНИЕ: Производители различаются схемами проводки с цветовым кодом.
• Прокладывайте силовые кабели высокого напряжения отдельно от силовых кабелей низкого напряжения.
• Отделите входную силовую проводку и кабели питания драйвера шагового двигателя/двигателя от проводки управления и кабелей обратной связи двигателя, поскольку они выходят из драйвера шагового двигателя и двигателя. Сохраняйте это разделение по всей длине провода.
• Используйте экранированный кабель для силовой проводки и обеспечьте заземление зажима на 360 градусов к стене корпуса. Оставьте место на вспомогательной панели для изгибов проводов.
• Сделайте все кабельные трассы как можно короче.
ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших системах шаговых двигателей, драйверов и контроллеров. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуются вместо кабелей, изготовленных заказчиком, для оптимизации производительности системы и обеспечения дополнительной безопасности шагового двигателя, драйвера и контроллера, а также пользователя. Полезные ссылки для отдельных продуктов Anaheim Automation, кабелей двигателя и кабелей связи:
http://www.anaheimautomation.com/products/accessories/cables.php?tID=136&pt=t&cID=36
http://www.anaheimautomation.com/products/accessories/cables.php?tID=137&pt=t&cID=36
http://www.anaheimautomation.com/products/accessories/cables.php?tID=157&pt=t&cID=36
ПРЕДУПРЕЖДЕНИЕ — Во избежание поражения электрическим током, выполните монтаж и подключение драйвера шагового двигателя и системы контроллера до подачи питания.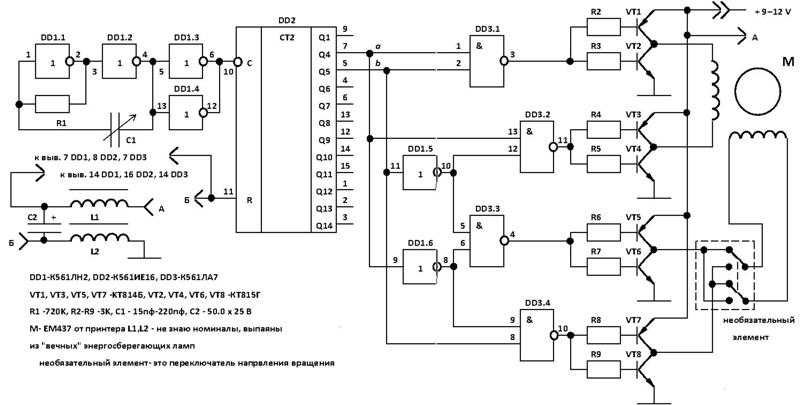 После подачи питания на соединительные клеммы может поступать напряжение.
После подачи питания на соединительные клеммы может поступать напряжение.
Высокотемпературная оплетка – общая практика
Срок службы кабелей, проводов и шлангов можно значительно увеличить с помощью высокотемпературной оплетки. Плетеный рукав представляет собой защитную оболочку для уязвимого материала обычных проводов. Высокие температуры могут вызвать трещины, истирание или возгорание, особенно для проводов и кабелей, которые используются в промышленных условиях или подвергаются воздействию внешних факторов. В дополнение к защите проводов от высоких температур, плетеные рукава могут защитить провода и кабели от истирания, химикатов, грязи и даже низких температур.
Экранированные кабели двигателя, обрезанные по длине
Кабель двигателя обеспечивает быстрое и простое подключение. Кабель экранирован для дополнительной защиты. Минимальная покупка составляет 5 футов, и после этого можно отрезать любой прирост. Цены указаны за фут. Примечание.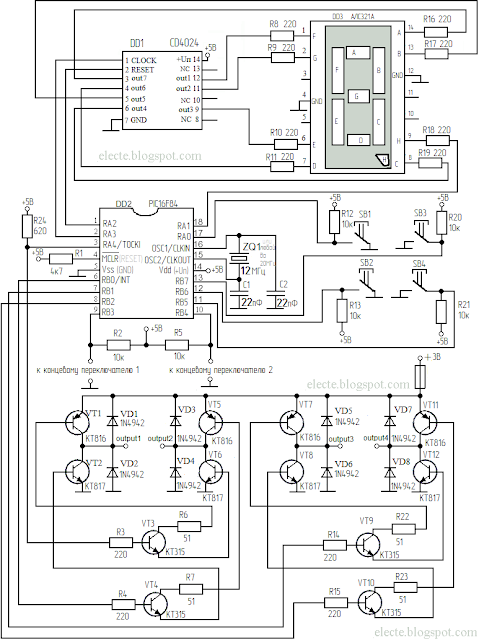 Кабели калибра 20 предназначены для очень коротких участков. См. наш веб-сайт:
Кабели калибра 20 предназначены для очень коротких участков. См. наш веб-сайт:
http://www.anaheimautomation.com/products/accessories/cables.php?tID=137&pt=t&cID=36
Электробезопасность на рабочем месте – Общие правила
При разработке политики электробезопасности на рабочем месте следует учитывать некоторые моменты, частично предоставленные Национальным фондом электробезопасности:
1. Имейте хорошее представление о том, что может пойти не так.
2. Используйте правильные инструменты для работы.
3. Всегда следуйте процедурам, чертежам и другой документации по продукту.
4. Изолировать оборудование от источников энергии.
5. Определите возможные опасности.
6. Установите ограничения на приближение к оборудованию и движущимся частям, чтобы свести к минимуму опасность.
7. Убедитесь, что вы должным образом обучены для работы.
8. Работайте с двигателем, шаговым драйвером и контроллером, а также со всеми другими изделиями Anaheim Automation и всем другим электрооборудованием только при обесточенном состоянии.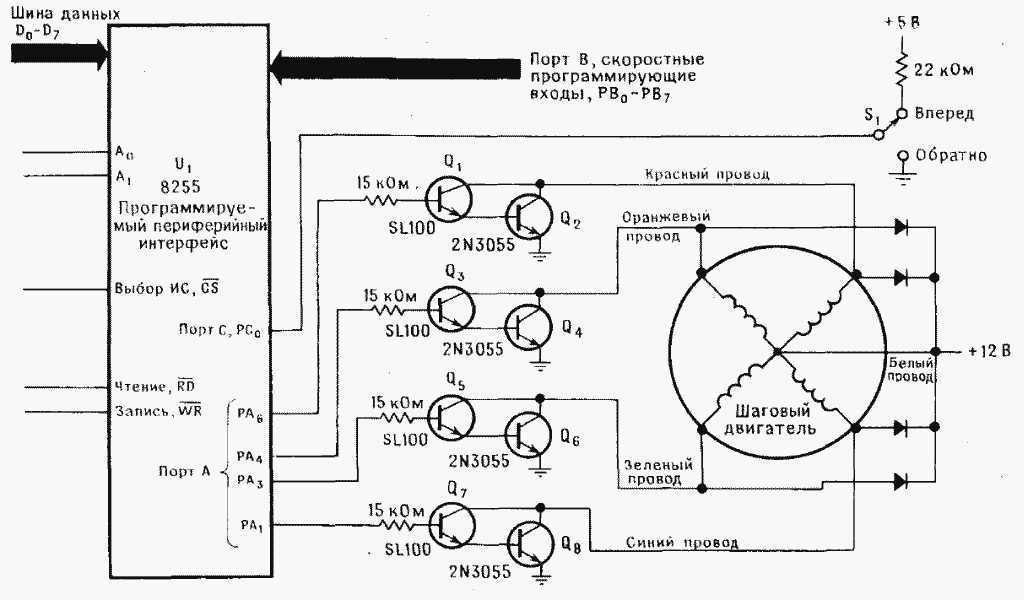
9. Проверьте и перепроверьте правила техники безопасности и документацию по продукту
10. Обращайтесь с обесточенным оборудованием как с находящимся под напряжением до тех пор, пока не будет проведено испытание на блокировку/маркировку (испытание, используемое для отключения машин или оборудования для предотвращения выброса потенциально опасной энергии во время работы машины). обслуживается)
Почему так много требований по электробезопасности
Такие организации, как Стандарт требований по электробезопасности для рабочих мест сотрудников, определяют шаги, которые компании должны предпринять, чтобы соответствовать федеральным нормам безопасности. К ним относятся:
1. Программа безопасности с определенными обязанностями
2. Расчеты степени опасности вспышки дуги
3. Электрооборудование для обеспечения безопасности рабочих
4. Обучение рабочих
5. Электроинструменты для обеспечения безопасности
6. Таблички по электробезопасности на оборудовании
Акцент на безопасность в основном связан со страхом того, что может сделать вспышка дуги.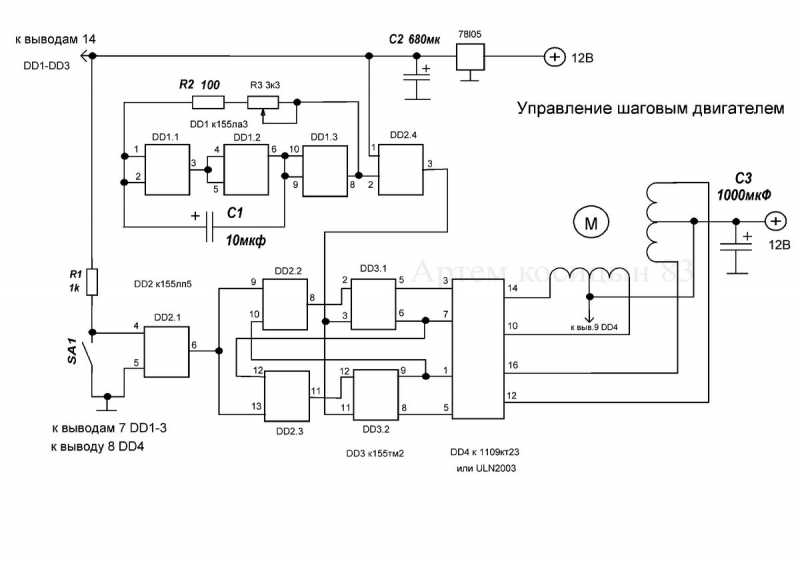 Вспышка дуги — это короткое замыкание по воздуху, которое может произойти, когда проводники не могут поддерживать напряжение. Вспышка дуги может иметь температуру до 5000 F и создает яркую вспышку света и громкий шум. Когда из электрооборудования вырывается лучистая энергия, горячие газы и расплавленный металл могут представлять опасность для жизни людей. Вот почему на рынке существуют четыре отдельных отраслевых стандарта или требования к электробезопасности для защиты рабочих от дуговых вспышек, а также оборудование для электробезопасности в виде обуви, костюмов, перчаток и многого другого. Установщик/пользователь двигателей, шаговых драйверов и контроллеров, а также всех других продуктов Anaheim Automation обязан ознакомиться со всеми требованиями безопасности.
Вспышка дуги — это короткое замыкание по воздуху, которое может произойти, когда проводники не могут поддерживать напряжение. Вспышка дуги может иметь температуру до 5000 F и создает яркую вспышку света и громкий шум. Когда из электрооборудования вырывается лучистая энергия, горячие газы и расплавленный металл могут представлять опасность для жизни людей. Вот почему на рынке существуют четыре отдельных отраслевых стандарта или требования к электробезопасности для защиты рабочих от дуговых вспышек, а также оборудование для электробезопасности в виде обуви, костюмов, перчаток и многого другого. Установщик/пользователь двигателей, шаговых драйверов и контроллеров, а также всех других продуктов Anaheim Automation обязан ознакомиться со всеми требованиями безопасности.
Избегайте работы с проводами под напряжением
Провод под напряжением — это провод, по которому проходит электричество. Если вы устанавливаете или ремонтируете что-либо электрическое, всегда изолируйте оборудование от источника питания.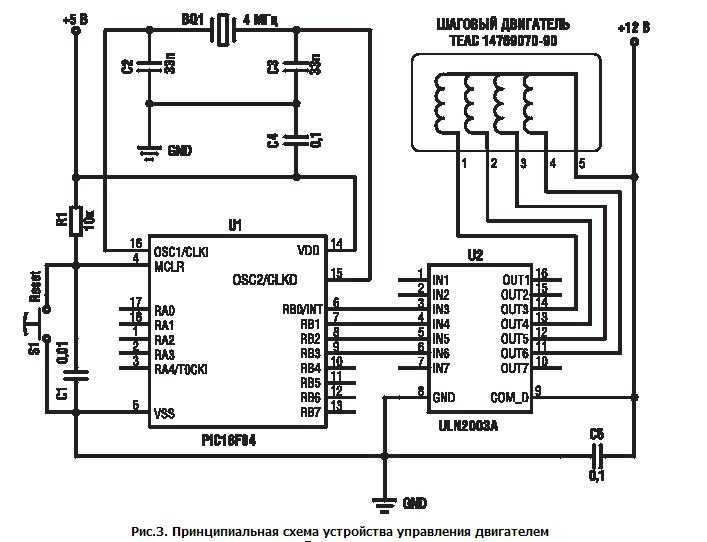 В дополнение к отключению любых автоматических выключателей всегда полезно проверить любую цепь или проводник, прежде чем прикасаться к ним. Это можно сделать очень просто с помощью ручного тестера напряжения. Используйте этот мультиметр каждый раз, когда вы должны работать с чем-то, что потенциально находится под напряжением.
В дополнение к отключению любых автоматических выключателей всегда полезно проверить любую цепь или проводник, прежде чем прикасаться к ним. Это можно сделать очень просто с помощью ручного тестера напряжения. Используйте этот мультиметр каждый раз, когда вы должны работать с чем-то, что потенциально находится под напряжением.
Опасность поражения электрическим током
Ниже перечислены четыре основные опасности, связанные с установкой электрооборудования:
1. Поражение электрическим током тело. Если через голову или грудь проходит электрический ток высокого напряжения, смерть может наступить мгновенно.
2. Вспышка дуги — Вспышка дуги возникает, когда проводящий объект находится слишком близко к наэлектризованному объекту, находящемуся под высоким напряжением. Эта вспышка может вызвать сильное нагревание окружающего воздуха, что может привести к возгоранию одежды.
3. Дуговой удар — Когда металлический предмет вызывает дуговую вспышку, последующий взрыв может вызвать потерю слуха и сотрясение мозга. Кроме того, этот взрыв может вызвать рваные раны от летящих металлических частей. Удары при падении и разряды дуги могут легко сбить рабочего с высокой платформы, такой как лестница или столб.
Кроме того, этот взрыв может вызвать рваные раны от летящих металлических частей. Удары при падении и разряды дуги могут легко сбить рабочего с высокой платформы, такой как лестница или столб.
Подавление перенапряжения – общие правила
Переходные электромагнитные помехи (ЭМП) могут возникать всякий раз, когда индуктивные нагрузки, такие как реле, соленоиды, пускатели двигателей или двигатели, управляются «жесткими контактами», такими как кнопочные или селекторные переключатели. Рекомендации по подключению основаны на предположении, что вы защищаете свою систему от воздействия переходных электромагнитных помех, используя ограничители перенапряжения для подавления переходных электромагнитных помех в их источнике. Индуктивные нагрузки, коммутируемые только полупроводниковыми выходными устройствами, не требуют подавления перенапряжений. Однако индуктивные нагрузки модулей вывода переменного тока, соединенных последовательно или параллельно с жесткими контактами, требуют подавления перенапряжения для защиты выходных цепей модуля, а также для подавления переходных электромагнитных помех.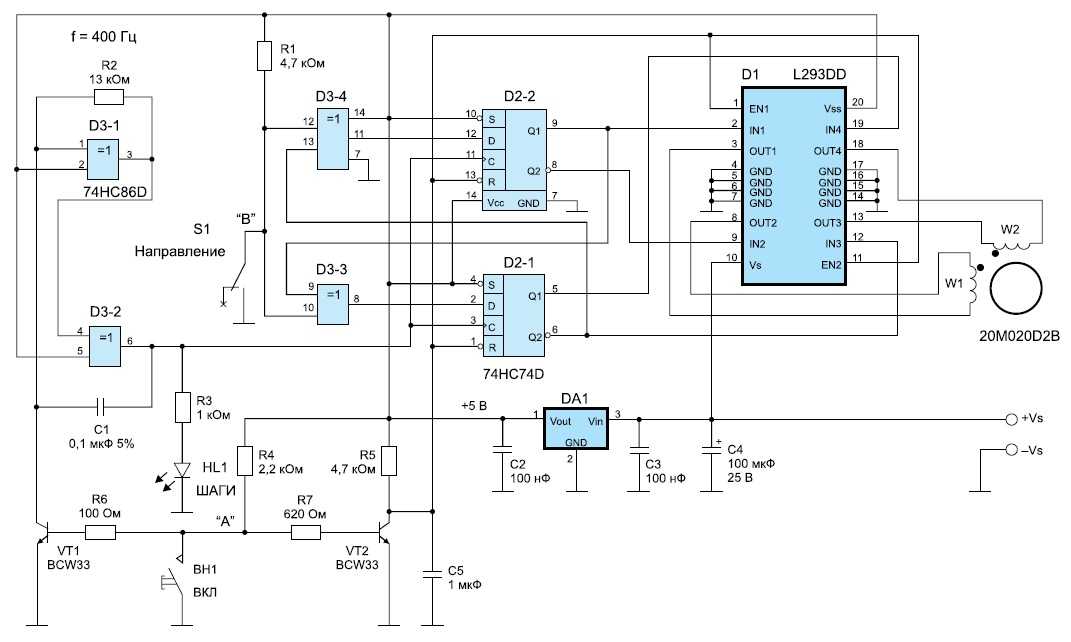
Электрические помехи от любого источника, будь то линия электропередачи, электрическая дуга, возникающая в соседней машине или процессе, или перекрестные помехи в системе управления, передаются по проводимости, индуктивной или емкостной связи или излучению. Чрезвычайно важно поддерживать нулевой потенциал электрических шкафов и панелей, кабелепроводов, экранов проводки и элементов машины и обеспечивать обратный путь к земле для шумовых токов, чтобы эффективно защитить чувствительную логику от электрических помех.
ЭМП – электромагнитные помехи
Электромагнитные помехи – это излучение или индукция электромагнитных помех в системе или машине. Двигатели в целом являются распространенным источником электромагнитных помех из-за компонентов их электромагнитной цепи. Электромагнитные помехи, которые могут ухудшить работу оборудования (устройства, системы или подсистемы) или вызвать неисправность оборудования, называются электромагнитными помехами (ЭМП). Двигатели являются потенциальными источниками шума и могут генерировать синфазные токи. Электромагнитные помехи могут привести к снижению производительности системы и/или повреждению данных. Когда он очень сильный, он может привести к полному отказу системы. ЭМП могут быть излучаемыми или кондуктивными от магнитных и электрических источников соответственно. В случае большинства двигателей присутствуют как излучаемые, так и кондуктивные помехи.
Электромагнитные помехи могут привести к снижению производительности системы и/или повреждению данных. Когда он очень сильный, он может привести к полному отказу системы. ЭМП могут быть излучаемыми или кондуктивными от магнитных и электрических источников соответственно. В случае большинства двигателей присутствуют как излучаемые, так и кондуктивные помехи.
Причины электромагнитных помех – Типичные источники электромагнитных помех
Промышленные – Дуговая сварка, двигатели, компьютеры, быстродействующие цифровые устройства, интегральные схемы, шнуры питания
Военные – Навигация и оборудование самолетов , стиральные, сушильные, посудомоечные машины, электробритвы, персональные компьютеры, системы кондиционирования и отопления
Восприимчив к электромагнитным помехам – может привести к плохой работе и/или повреждению
Приемники связи, микропроцессоры, промышленные приводы и средства управления, медицинские приборы, бытовая техника
ЭМС – электромагнитная совместимость
Электромагнитная совместимость – это практика контроля и снижения нежелательных электромагнитных помех. Электромагнитная совместимость — почти идеальное состояние, при котором рецептор (устройство, система или подсистема) хорошо функционирует в обычной электромагнитной среде, не вводя
Электромагнитная совместимость — почти идеальное состояние, при котором рецептор (устройство, система или подсистема) хорошо функционирует в обычной электромагнитной среде, не вводя
недопустимые электромагнитные помехи для любых других устройств, оборудования или систем, находящихся в той же среде.
ВАЖНОЕ ПРИМЕЧАНИЕ. Характеристики электромагнитной совместимости относятся ко всей системе шагового двигателя, привода и контроллера, а также ко всем другим системам и механизмам управления движением. Следовательно, ответственность за контроль и снижение нежелательных электромагнитных помех лежит на OEM-производителе (производителе оригинального оборудования), а не на тех, кто поставляет продукты для управления движением. Часто существуют разные правила ЭМС в зависимости от назначения системы и страны, в которой она используется или продается.
Методы снижения электромагнитных помех для двигателей для улучшения характеристик ЭМС систем.
Дуговой разряд (иногда называемый дуговым разрядом или гальванической дугой) представляет собой электрическую характеристику, при которой ток может протекать через воздух или другие обычно непроводящие материалы.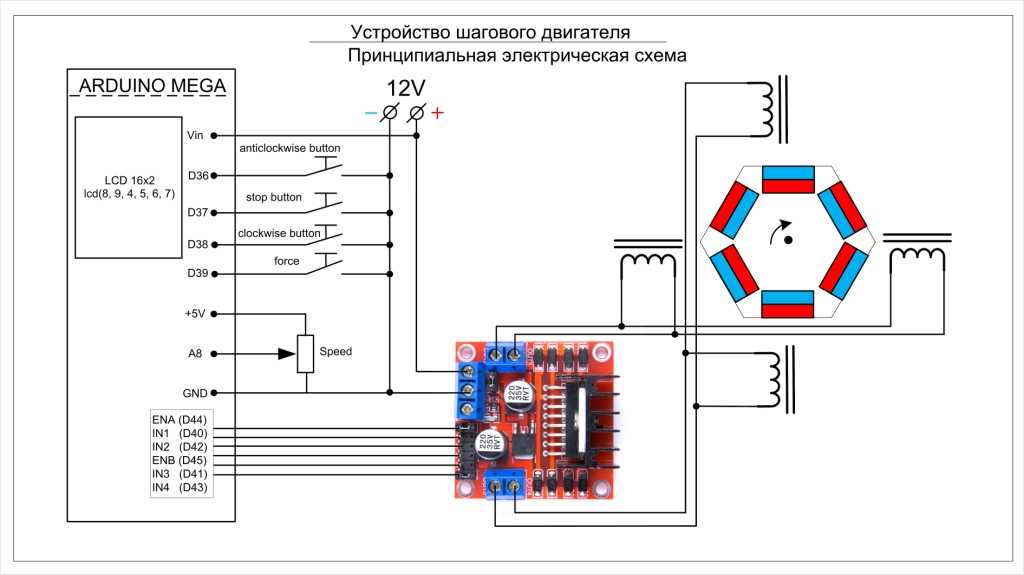 Возможно, вы видели случаи искрения между двумя проводами или на силовых шинах поездов или трамваев. Это не следует путать с электрической искрой, поскольку электрическая дуга непрерывна, однако они выглядят одинаково.
Возможно, вы видели случаи искрения между двумя проводами или на силовых шинах поездов или трамваев. Это не следует путать с электрической искрой, поскольку электрическая дуга непрерывна, однако они выглядят одинаково.
Хотя искрение может быть полезным как при сварке, так и при ленточном освещении, в некоторых случаях оно может быть источником электромагнитных помех. Например: В двигателях постоянного тока искрение может быть обычным явлением из-за периодического прерывания тока в обмотках ротора. Это очень высокочастотное содержание спектра, которое может проявляться как широкополосный шум, наложенный на другие сигналы. Двигатели постоянного тока также обеспечивают пути для синфазных токов через свои корпуса.
Другой пример излучаемых и кондуктивных помех может исходить от схемы драйвера. Типичная схема H-моста в идеале должна обеспечивать постоянный ток для двигателя, но этот ток имеет быстрое время нарастания из-за быстрого и частого переключения тока в цепи драйвера.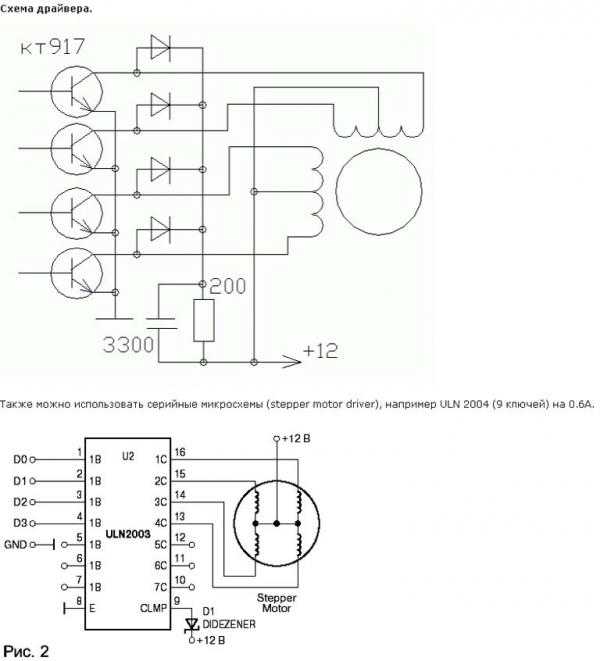 Еще одна существенная проблема возникает, когда двигатель расположен далеко от драйвера, так как это создает довольно большую площадь петли между выводами двигателя и корпусом устройства. Радиационный потенциал является прямой функцией площади петли; чем больше петля, тем больше выбросы.
Еще одна существенная проблема возникает, когда двигатель расположен далеко от драйвера, так как это создает довольно большую площадь петли между выводами двигателя и корпусом устройства. Радиационный потенциал является прямой функцией площади петли; чем больше петля, тем больше выбросы.
Предотвращение проблем с электромагнитными помехами:
• Подавление возможных излучений в точке источника.
• Сделать шаговый двигатель, шаговый драйвер и контроллер, а также все другие компоненты системы менее восприимчивыми к электромагнитным помехам.
• Сделать путь связи как можно более неэффективным. Заземление — одноточечное, многоточечное или гибридное заземление в зависимости от частоты работы
• Экранирование — Металлический барьер, используемый для подавления проникновения излучаемой ЭМ энергии в оборудование
• Фильтрация — Методы фильтрации используются для подавления кондуктивных помех в линиях питания, сигнала и управления.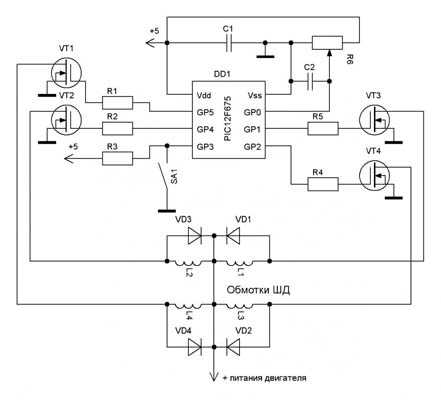
• Печатная плата (PCB) — Правильное проектирование и компоновка печатных плат на ранней стадии проектирования необходимы для устранения проблем электромагнитных помех в будущем
• Шумовая связь — Проводящая связь через кабели, связь через общий и методы подключения контура заземления являются хорошими профилактическими мерами против проблем с электромагнитными помехами.
Стандартные компоненты
Самым простым решением является размещение керамического конденсатора между клеммами двигателя как можно ближе к двигателю. Он известен как развязывающий конденсатор и снижает электромагнитные помехи за счет удаления некоторых высокочастотных шумовых сигналов. Обычное значение, используемое для этих развязывающих конденсаторов, составляет от 100 пФ до 100 нФ, в зависимости от размера двигателя.
ВАЖНОЕ ПРИМЕЧАНИЕ: Электромагнитная совместимость является важной областью электроники со строгими правилами, а двигатели и их схемы являются значительными источниками электромагнитных помех.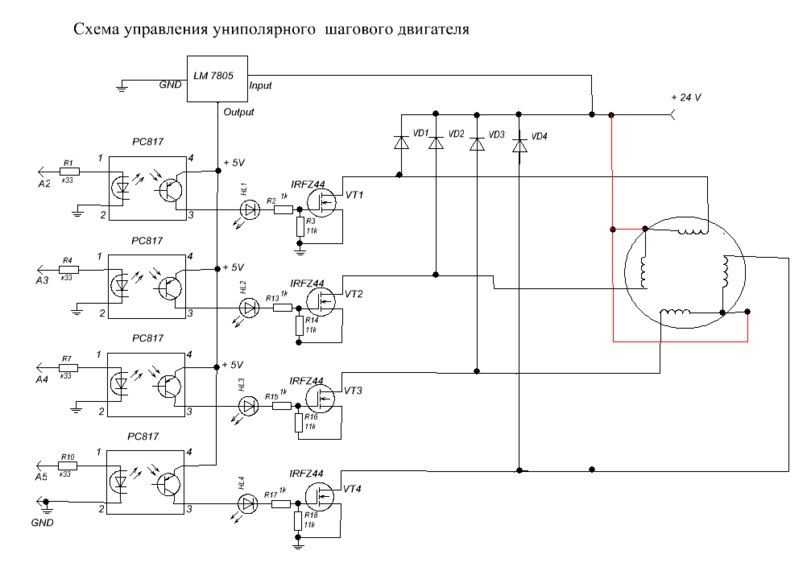 Поэтому очень важно, чтобы инженеры предприняли соответствующие действия для максимально возможного снижения электромагнитных помех и улучшения электромагнитной совместимости.
Поэтому очень важно, чтобы инженеры предприняли соответствующие действия для максимально возможного снижения электромагнитных помех и улучшения электромагнитной совместимости.
Помехи в линии электропередач
В этом разделе представлена основная информация, которая должна помочь обеспечить безопасную, успешную и надежную установку шагового двигателя, шагового драйвера и контроллера. Он не охватывает все возможности, но дает хорошую базовую информацию и рекомендации по шаговым двигателям, шаговым драйверам и приложениям контроллеров, а также другим системам управления движением.
Линии электропередач являются одним из наиболее неприятных источников электрических помех. Линии электропередач, к которым подключены компоненты управления движением, могут также подавать питание на такое оборудование, как дуговые сварочные аппараты, сильноточные (индукционные) печи или электродвигатели большой мощности. Запуск или остановка этих крупных потребителей электроэнергии или изменение условий нагрузки на них могут вызвать переходные напряжения, которые могут принимать форму скачков или провалов напряжения, сопровождаемых высокочастотным шумом, наложенным на форму входного напряжения.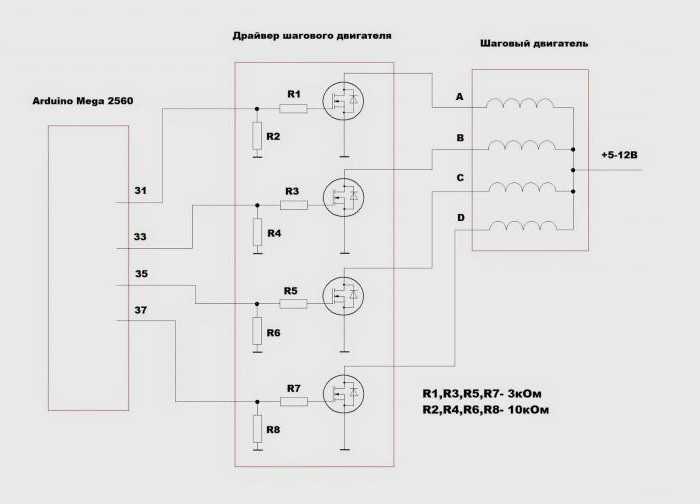 Этот электрический шум может привести к неправильному подсчету цифровой электронной системы управления, потере сохраненных данных, сохранению неверных данных или потере синхронизации осей.
Этот электрический шум может привести к неправильному подсчету цифровой электронной системы управления, потере сохраненных данных, сохранению неверных данных или потере синхронизации осей.
Линии электропередач в незаземленной энергосистеме Delta по своей природе шумны. Эта система плавает по отношению к земле и может также привести к подаче чрезмерно высокого напряжения на подключенное к ней оборудование. По этим причинам для подачи питания на управляемый компьютером станок или другую систему движения предпочтительнее использовать заземленную систему питания по схеме «звезда».
Чтобы свести к минимуму влияние шума линии электропередачи на управляемые компьютером станки или другие компоненты системы управления движением, силовая проводка физически и электрически отделена от проводки логического сигнала. Кроме того, экранированные кабели используются для проводки логических сигналов, где это необходимо, и обеспечивается эффективная система заземления с общей точкой. Несмотря на то, что эти меры предосторожности были приняты, в экстремальных случаях шум линии электропередач все еще может быть связан с логикой и вызывать сбои в работе системы управления, как описано выше.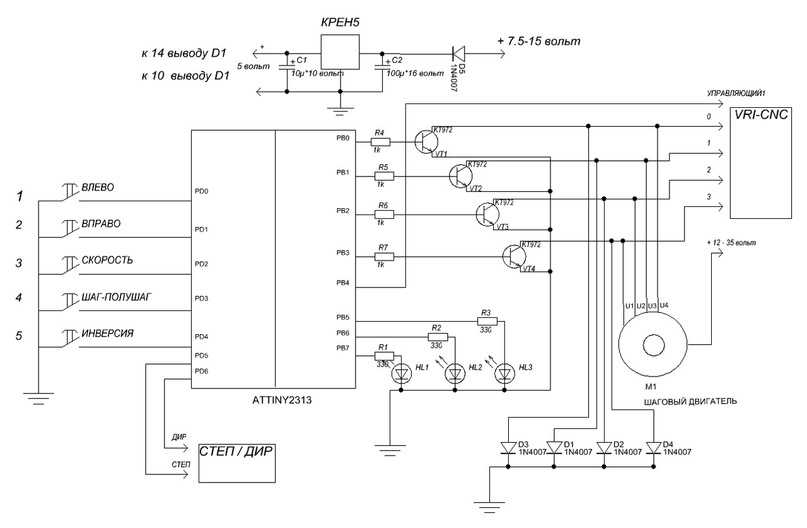
Возможные решения
Для устранения сбоев в работе драйвера шагового двигателя и контроллера, ЧМИ, ПЛК и компьютера, вызванных чрезмерным шумом в сети, может потребоваться одно или несколько из следующих действий:
1. Уменьшите шум существующей линии электропередачи или установите отдельную линию питания, подходящую к машине или процессу.
2. Если единственным доступным источником питания является незаземленный источник питания типа «треугольник», установите схему «треугольник-треугольник».
изолирующий трансформатор перед блоком управления и заземлите нейтраль звезды, чтобы улучшить
шумоподавления и для лучшей регулировки входного напряжения на элементы управления.
3. Установите генератор переменного тока перед блоком управления, чтобы изолировать его от входящей линии питания.
Возможные последствия электромагнитных помех в системе шагового двигателя, драйвера и контроллера:
• Прерывистые помехи в шаговых драйверах и контроллерах
• Компьютеры и HMI могут давать сбои и терять данные, вызывая перезапуск/запуск
• Сгорание -отсутствие чувствительных компонентов
• Нарушает настройки и регистры состояния управляющего оборудования
• Меньше производительности
Система шагового привода и контроллера считается электромагнитно-совместимой, если:
• Шаговый двигатель, шаговый привод и контроллер не создают помех другим компонентам системы или оборудования.
• Шаговый двигатель, драйвер шагового двигателя и контроллер не чувствительны к электромагнитным помехам от других компонентов системы или оборудования.
• Шаговый двигатель, драйвер шагового двигателя и контроллер сами по себе не создают помех.
Только для квалифицированных специалистов
Электрическая проводка сложна и потенциально опасна для жизни при неправильной установке. Не пытайтесь установить двигатель или драйвер шагового двигателя и контроллер, или любой другой продукт Anaheim Automation, или другое электрооборудование, если вы не уверены, что прошли надлежащее обучение и образование для выполнения этой задачи. Это одна из областей бизнеса, в которой вы не можете позволить себе быть бережливым. Если вы не уверены в том, как выполнить установку шагового двигателя, драйвера и контроллера, всегда нанимайте квалифицированного электрика/сборщика панелей/интегратора. Двигатель, шаговый драйвер и контроллер никогда не должны использоваться в местах с водой, влагой, пылью или легковоспламеняющимися материалами. Соблюдение надлежащих правил техники безопасности может спасти жизнь и ценное имущество, предотвратив поражение электрическим током и пожары.
Подходящие инструменты
При установке драйвера и контроллера шагового двигателя, а также любой другой проводки, связанной с любым электрическим оборудованием, важно использовать подходящие инструменты. Непроводящий инструмент будет иметь резиновую рукоятку, за которую вы сможете его держать. Никогда не используйте для установки инструмент из цельного металла, даже если вы надели перчатки и выключили источник питания. Нет такого понятия, как быть слишком осторожным, когда дело доходит до поражения электрическим током или ожогов.
Основные правила электробезопасности
В правилах OSHA, касающихся техники безопасности при работе с электричеством, говорится о двух очень важных основных положениях. Во-первых, токоведущие части должны быть обесточены перед выполнением работ на них или рядом с ними. Второй момент заключается в том, что даже после того, как открытые части были обесточены, они все равно должны рассматриваться как находящиеся под напряжением до тех пор, пока они не будут заблокированы и/или маркированы. Вот почему ОСНОВНОЕ ПРАВИЛО для процедуры техники безопасности при работе с электричеством сформулировано следующим образом;
ВСЕ ПРОВОДНИКИ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ, НЕОБРАБОТАННЫЕ ИЛИ ИЗОЛИРОВАННЫЕ, СЧИТАЮТСЯ НАНИМАЕМЫМИ ЭЛЕКТРОПИТАНИЕМ, ПОКА НЕ ДОКАЗАТЕЛЬНО ИНОЕ. ОНИ ДОЛЖНЫ БЫТЬ ОБЕСПЕЧЕНЫ, ЗАБЛОКИРОВАНЫ И ПРОВЕРЕНЫ НА ОТСУТСТВИЕ НАПРЯЖЕНИЯ ПЕРЕД РАБОТОЙ НА НИХ ИЛИ РАБОТОЙ ВБЛИЗИ. РАБОТЫ НА ПРОВОДНИКАХ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ МОГУТ ВЫПОЛНЯТЬСЯ ТОЛЬКО КВАЛИФИЦИРОВАННЫМ ПЕРСОНАЛОМ, УПОЛНОМОЧЕННЫМ НА ВЫПОЛНЕНИЕ РАБОТ.
ПРИМЕЧАНИЕ. Лицам, не знакомым с шаговыми двигателями, шаговыми драйверами и контроллерами, а также с другими компонентами управления движением, Anaheim Automation рекомендует проконсультироваться с системным интегратором по всем вопросам установки.
Поиск и устранение неисправностей драйвера и контроллера шагового двигателя
Проблема: Шаговый двигатель не работает.
Решение: Дважды проверьте правильность подключения электропроводки двигателя и надежность крепления фаз на контактах клеммной колодки. В некоторых случаях остановка шагового двигателя вызывает сильный всплеск напряжения, который часто повреждает фазовые транзисторы драйвера или контроллера шагового двигателя. Некоторые драйверы и контроллеры шаговых двигателей предназначены для защиты от таких случаев. В противном случае устройства подавления переходных процессов могут быть добавлены извне.
Проблема: Прерывистая или неустойчивая работа шагового двигателя или драйвера/контроллера шагового двигателя.
Решение: Это наиболее распространенная причина сбоя, которую трудно обнаружить. Начните с проверки герметичности всех соединений между шаговым двигателем, драйвером шагового двигателя и контроллерами. Признаки обесцвечивания на клеммах/соединениях могут указывать на плохое соединение. При замене шагового двигателя, драйвера шагового двигателя или пакета драйверов или контроллера в системе управления движением обязательно проверьте все клеммные колодки и разъемы. Проверьте правильность кабелей/проводки. Нагрузите проводку и соединения шагового двигателя на наличие плохих условий и проверьте их с помощью омметра. По возможности используйте экранированные кабели Anaheim Automation для подключения шагового двигателя.
Проблема: Проводка кабеля слишком длинная.
Решение: Пользователи должны стараться, чтобы длина кабелей не превышала 25 футов. Если требуется, чтобы проводка от двигателя к приводу/контроллеру превышала 25 футов, обратитесь на завод для получения инструкций. Вполне вероятно, что для таких применений потребуется защита от переходного напряжения.
Проблема: Драйвер/контроллер перегревается
Решение: Для общей производительности драйверов шаговых двигателей и контроллеров необходима адекватная вентиляция и охлаждение. Несоблюдение этого требования сократит срок службы и снизит общую производительность драйвера/контроллера. Установка вентилятора или использование материала радиатора может помочь поддерживать температуру драйвера/контроллера.
Драйвер шагового двигателя и контроллер Глоссарий
Бифилярная обмотка — относится к конфигурации обмотки шагового двигателя, где каждый полюс статора имеет пару обмоток; шаговый двигатель будет иметь либо 6, либо 8 проводов, в зависимости от оконечной нагрузки. Эта конфигурация проводки может управляться от однополярного или биполярного драйвера.
Двухуровневый драйвер шагового двигателя — двухуровневый драйвер шагового двигателя использует высокое напряжение для получения высокой скорости тока для увеличения времени нарастания в обмотках шагового двигателя.
Часы – генератор импульсов, контролирующий время включения цепей, управляющих скоростью шагового двигателя.
Замкнутая система – система с типом управления с обратной связью, в которой выход используется для изменения входа.
Контроллер (Шаговый двигатель) – регулирующий механизм; по сути, источник питания постоянного тока плюс переключение питания с соответствующими схемами для управления переключением в правильной последовательности.
Detent Torque – удерживающий момент, когда ток в двигателе отсутствует. Максимальный крутящий момент, который можно приложить к валу шагового двигателя без напряжения, не вызывая непрерывного вращения. Минимальный крутящий момент, присутствующий в обесточенном двигателе. Фиксирующий крутящий момент шагового двигателя обычно составляет около 1% от его статического крутящего момента под напряжением.
Драйвер (шаговый двигатель) — часто называемый преобразователем, управляет шаговым двигателем на основе импульсов часов, генератора импульсов или компьютера. Передает последовательность импульсов и подаваемую мощность на соответствующие обмотки шагового двигателя.
Динамический крутящий момент – крутящий момент, развиваемый двигателем при работе на малых скоростях.
Драйвер шагового двигателя L/R – основа для более старых моделей приводов. Их называют приводами постоянного напряжения, поскольку они подают либо положительное, либо отрицательное напряжение на каждую обмотку для установки ступенчатых положений.
Максимальный рабочий крутящий момент – максимальный крутящий момент, который двигатель может крутить без пропуска шага. Обычно это происходит, когда обмотки последовательно запитываются с частотой приблизительно 5 pps.
Разомкнутая система — относится к системе управления движением, в которой не используются внешние датчики для подачи сигналов коррекции положения или скорости.
Полюс – часть магнитной цепи, в которой магнитный полюс создается либо постоянным магнитом, либо обмотками.
Импульс – электрический сигнал или напряжение короткой продолжительности, используемые для передачи разведданных.
Драйвер шагового двигателя с ШИМ (широтно-импульсной модуляцией) , также называемый прерывателем, драйвером постоянного тока или микрошагом, использует один источник высокого напряжения для управления шаговыми двигателями.
Номинальный крутящий момент – крутящий момент двигателя при заданной скорости. Это максимальный крутящий момент, который двигатель может развивать при нагрузке, и обычно он указывается с помощью кривой крутящий момент/скорость.
Разрешение – наименьшее приращение позиционирования, которое может быть достигнуто. Его часто определяют как количество шагов, необходимых для того, чтобы вал двигателя совершил один полный оборот. Обратная величина числа шагов на оборот двигателя.
Ротор – вращающаяся часть двигателя (может входить вал).
Статор – стационарные магнитные части двигателя, включая обмотки.
Шаг – перемещение ротора из одного рабочего положения в другое.
Угол шага – номинальный угол, на который поворачивается вал шагового двигателя между соседними положениями шага. Это зависит от двигателя и последовательности движения (режим движения).
Step Increment – указание размера шага или движения. Обычно это указывается в градусах для роторного двигателя и в дюймах или миллиметрах для линейного двигателя.
Шаговый (шаговый, шаговый) двигатель – цифровой привод, работающий от дискретных импульсов (входных сигналов) и производящий движение с дискретными приращениями. Может быть вращательным или линейным шагом.
Положение шага – угловое положение, которое принимает вал ненагруженного шагового двигателя при включении питания. Положение шага не обязательно совпадает с положением фиксации.
Крутящий момент – сила или пара, стремящаяся или производящая вращение. Обычными единицами крутящего момента шагового двигателя являются унции на дюйм, Нм или мНм.
Train Pulse – серия разнесенных импульсов.
Срок службы драйвера и контроллера шагового двигателя
Срок службы драйвера и контроллера шагового двигателя может варьироваться в зависимости от приложения пользователя. Соблюдение руководства пользователя для правильной установки и использования может значительно увеличить срок службы шагового драйвера и контроллера.
Необходимое техническое обслуживание драйвера шагового двигателя и контроллера
Техническое обслуживание драйвера шагового двигателя может меняться в зависимости от износа в результате использования пользовательских приложений. Продукция Anaheim Automation возвращается с годовой гарантией, которая предлагает большую помощь в своевременном ремонте драйверов шаговых двигателей.
Сколько стоят драйверы и контроллеры шаговых двигателей?
Anaheim Automation предлагает различные драйверы и контроллеры шаговых двигателей с входным напряжением переменного или постоянного тока, рабочими токами и шаговым разрешением для удовлетворения ваших потребностей. Цены зависят от типа драйвера и контроллера шагового двигателя, но с помощью нашего опытного отдела продаж мы сможем найти драйвер/контроллер шагового двигателя, который наилучшим образом соответствует потребностям вашего приложения.
Часто задаваемые вопросы по драйверу и контроллеру шагового двигателя
В: В чем разница между контроллером шагового двигателя с замкнутым контуром и контроллером шагового двигателя с разомкнутым контуром?
A: В контроллере шагового двигателя без обратной связи обратная связь от двигателя к контроллеру отсутствует. Этот тип контроллера эффективен, когда двигатель несет постоянную нагрузку с постоянной скоростью. Контроллер двигателя с обратной связью более применим в приложениях, где нагрузка или скорость меняются. По сравнению с контроллером с обратной связью, контроллер с разомкнутым контуром менее сложен и более доступен.
В: Когда следует использовать микрошаг?
A: Микрошаг обычно используется в приложениях, требующих, чтобы двигатель работал со скоростью менее 700 импульсов в секунду.
Тест по шаговому драйверу
Какими аспектами шагового двигателя управляет шаговый драйвер/контроллер?
A. Импульсы, подаваемые на обмотки шагового двигателя
B. Пуск/Стоп
C. Направление
D. Скорость
E. Все вышеперечисленное
Каким образом можно произвести импульс?
A. Микропроцессор
B. Логика синхронизации
C. Тумблер
D. Все вышеперечисленное
В чем разница между полным шагом и полушагом?
A. В режиме полного шага включены две фазы, а в режиме полушага – только одна фаза.
B. На полушаге очевиден больший резонанс
C. Для полного шага требуется больше энергии
D. Полушаг обеспечивает лучшее разрешение
Перечислите отрасли, в которых используются шаговые драйверы и контроллеры:
• Самолет
• Автомобильная
• Химическая
• Бытовая электроника и оргтехника
• Промышленная
• Медицинская
• Научные приборы
Какие из следующих НЕ шаговый драйвер и контроллер?
A. L/R
B. Преобразователь
C. Bilevel
D. ASD
Если для приложения, использующего шаговый двигатель с драйвером/контроллером шагового двигателя, требуется обратная связь, какое устройство потребуется для этого?
A. Счетчик
B. Энкодер
C. Линейная направляющая
D. Коммутатор
Что НЕ верно в отношении драйвера/контроллера шагового двигателя?
A. Может быстро ускорять нагрузки
B. Нет обратной связи, указывающей на пропущенные шаги
C. Сложные конструкции
Правда или нет, шаговый двигатель работает более плавно при полушаге, а не при микрошаге?
Ложь
Настройка драйвера и контроллера шагового двигателя
Anaheim Automation была основана в 1966 году как производитель систем управления движением «под ключ». Акцент компании на исследованиях и разработках обеспечил постоянное внедрение передовых шаговых драйверов, двигателей и контроллеров. Сегодня Anaheim Automation входит в число ведущих производителей и дистрибьюторов продуктов для управления движением, и эта позиция подкрепляется ее превосходной репутацией производителя качественной продукции по конкурентоспособным ценам. Линейки шаговых двигателей, драйверов и контроллеров не являются исключением в достижении цели компании.
Anaheim Automation предлагает широкий ассортимент стандартных шаговых двигателей, драйверов и контроллеров. Иногда OEM-клиенты со средними и большими требованиями к количеству предпочитают иметь драйвер шагового двигателя, изготовленный по индивидуальному заказу или модифицированный в соответствии с их конкретными требованиями к конструкции или упаковке. Иногда настройка так же проста, как монтажные размеры листового металла, цвета или этикетка с их названием и номером детали. В других случаях заказчик может потребовать, чтобы драйвер шагового двигателя соответствовал идеальным характеристикам, таким как скорость, крутящий момент и/или напряжение.
Инженеры ценят линейку шаговых драйверов и контроллеров Anaheim Automation, которая может удовлетворить их стремление к творчеству, гибкости и эффективности системы. Покупатели ценят простоту «универсального магазина» и экономию средств за счет индивидуальной конструкции драйвера шагового двигателя, в то время как инженеры довольны самоотверженным участием Anaheim Automation в их конкретной системе шагового двигателя, драйвера и контроллера.
Линейка стандартных шаговых драйверов и контроллеров Anaheim Automation представляет собой экономичное решение, известное своей прочной конструкцией и отличными характеристиками. Значительный рост продаж стал результатом целенаправленного проектирования, дружелюбного обслуживания клиентов и профессиональной помощи в применении, что часто превосходит ожидания клиентов в отношении выполнения их индивидуальных требований. В то время как большая часть продаж шаговых драйверов и контроллеров Anaheim Automation связана с особыми, индивидуальными или частными требованиями, компания гордится своей стандартной складской базой, расположенной в Анахайме, Калифорния, США. Чтобы сделать настройку шагового драйвера доступной, требуется минимальное количество и/или плата за единовременную разработку (NRE). Свяжитесь с заводом для получения подробной информации, если вам потребуется специальный драйвер шагового двигателя в вашей конструкции.
Все продажи индивидуального или модифицированного шагового драйвера и контроллера не подлежат отмене и возврату, и по каждому запросу клиент должен подписать соглашение NCNR. Все Продажи, в том числе индивидуальный шаговый драйвер, осуществляются в соответствии со стандартными положениями и условиями Anaheim Automation и заменяют любые другие явные или подразумеваемые условия, включая, помимо прочего, любые подразумеваемые гарантии.
Клиенты Anaheim Automation линейки драйверов и контроллеров шаговых двигателей разнообразны: компании, эксплуатирующие или разрабатывающие автоматизированное оборудование или процессы, связанные с упаковкой пищевых продуктов, косметики или медицинских изделий, требованиями к маркировке или защите от несанкционированного доступа, приложениями для резки по длине, сборки, конвейера , погрузочно-разгрузочные работы, робототехника, спецэффекты для киносъемки и проекции, медицинская диагностика, устройства для контроля и безопасности, управление потоком насосов, изготовление металлов (машины с ЧПУ) и модернизация оборудования. Многие OEM-клиенты просят нас сделать шаговые драйверы «частной маркой», чтобы их клиенты оставались лояльными к ним в отношении обслуживания, замены и ремонта.
ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь в отношении линейки шаговых драйверов и двигателей, а также всей продукции, производимой или распространяемой Anaheim Automation, предоставляется бесплатно. Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Однако любой выбор, ценовое предложение или предложение по применению шагового двигателя или любого другого продукта, предлагаемые персоналом Anaheim Automation, ее представителями или дистрибьюторами, предназначены только для помощи покупателю. Во всех случаях определение пригодности заказного драйвера шагового двигателя к конкретной конструкции системы является исключительно ответственностью заказчика. Несмотря на то, что прилагаются все усилия, чтобы дать исчерпывающие рекомендации относительно продуктовой линейки шаговых драйверов, а также других продуктов для управления движением, а также предоставить точные технические данные и иллюстрации, такие рекомендации и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Принадлежности для драйвера шагового двигателя и контроллера
Управляйте своими требованиями к движению с помощью недорогого драйвера и двигателя шагового двигателя Anaheim Automation в комплекте с контроллерами, индексаторами или генераторами импульсов. Имея на выбор несколько вариантов, вы можете выбрать правильный шаговый двигатель, драйвер шагового двигателя и контроллер для своего проекта. Драйвер шагового двигателя может сочетаться с программируемыми контроллерами шагового двигателя и включать собственное программное обеспечение без дополнительной оплаты, что делает его отличным пакетом по экономичной цене. Также предлагаются шаговые драйверы, совместимые с индексаторами с ручной предустановкой и простыми генераторами линейных импульсов.
Кроме того, шаговый двигатель может быть прикреплен к задней стороне шагового двигателя. Контроллеры также могут быть добавлены в качестве опции. Контроллеры, индексаторы и генераторы импульсов можно приобрести отдельно от драйвера шагового двигателя в качестве аксессуара.