Содержание
Схема подключения шагового двигателя к драйверу
Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое. На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов. Вот технологии быстро растут. И во всех этих аппаратов невозможно без шагового двигателя ШД. Доброго дня уважаемые друзья, коллеги, будущие партнёры и гости.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
- Схемы подключения шаговых двигателей
- Главное меню
- Схемы управления шаговыми двигателями
- Драйвер шагового двигателя A4988
- Обратите внимание на следующие товары:
- Драйвер биполярных шаговых двигателей
- Советы для начинающих.
Arduino и шаговый двигатель Nema 17
- Шаговый двигатель 4 провода подключение
- Как работает шаговый электродвигатель?
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: ШАГОВЫЙ ДВИГАТЕЛЬ ПРОСТОЙ ДРАЙВЕР ДЛЯ НЕГО
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
Перед подключением Nema 17, за плечами был определенный опыт работы с шаговиком 24byj48 даташит. Управлялся он и с помощью Arduino, и с помощью Raspberry pi, проблем не возникало. Основная прелесть этого двигателя — цена около 3 долларов в Китае. Причем, за эту сумму вы приобретаете двигатель с драйвером в комплекте.
Согласитесь, такое можно даже и спалить, не особо сожалея о содеянном. Теперь появилась задача поинтереснее. Управлять шаговым двигателем Nema 17 даташит. Данная модель от оригинального производителя реализуется по цене около 40 долларов.
Теперь появилась задача поинтереснее. Управлять шаговым двигателем Nema 17 даташит. Данная модель от оригинального производителя реализуется по цене около 40 долларов.
Китайские копии стоят раза в полтора-два дешевле — около долларов. Очень удачная модель, которая часто используется в 3D принтерах и CNC-проектах.
Первая возникшая проблема — как подобрать драйвер для этого двигателя. Силы тока на пинах Arduino для питания не хватит. Google подсказал, что для оживления Nema 17 можно использовать драйвер A от Poulou даташит. Кроме того, есть вариант использования микросхем LD. Но A считается более подходящим вариантом, так что на нем и остановились во избежание потенциальных проблем.
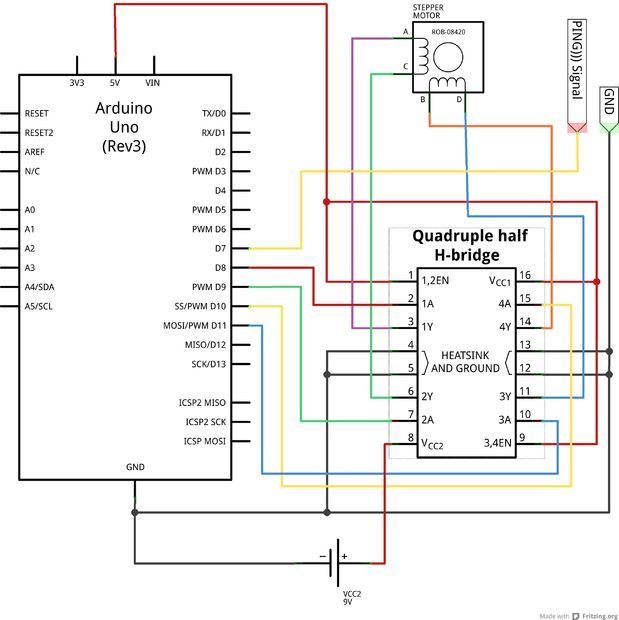
Подключение было реализовано на основании этой темы на Arduino форуме. Рисунок приведен ниже. Собственно, данная схема присутствует практически на каждом блоге-сайте, посвященном Arduino.
Плата была запитана от 12 вольтового источника питания. Но двигатель не вращался. Проверили все соединения, еще раз проверили и еще раз Наш 12 вольтовый адаптер не выдавал достаточной силы тока.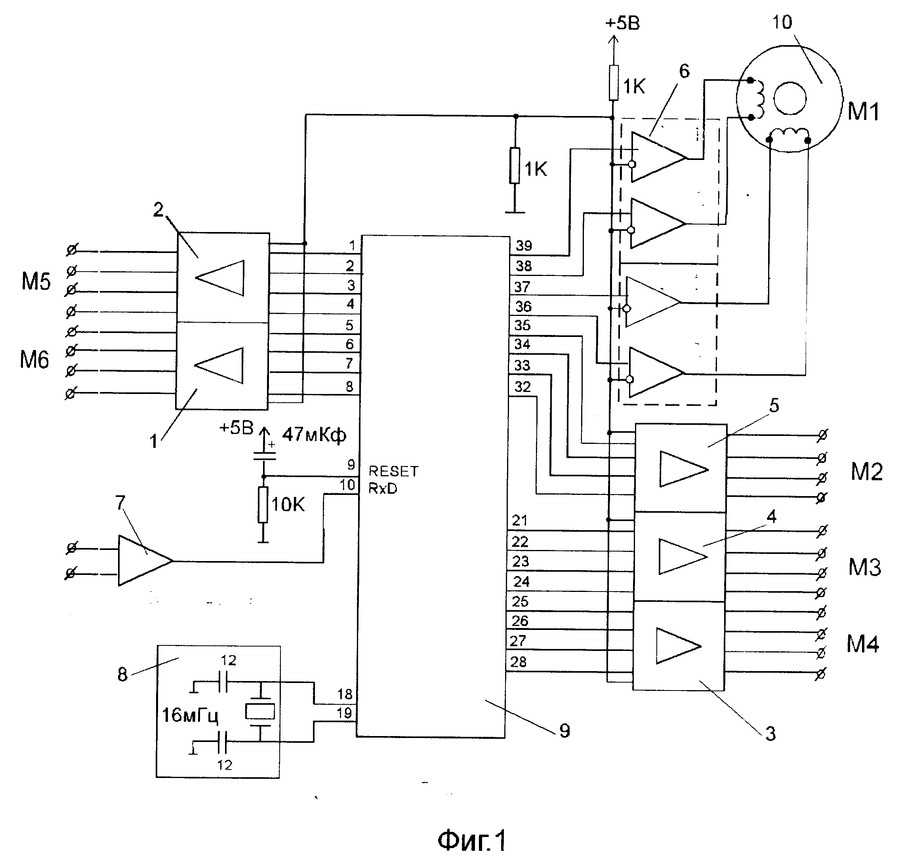 В результате адаптер был заменен на 8 батареек АА. И двигатель начал вращаться!
В результате адаптер был заменен на 8 батареек АА. И двигатель начал вращаться!
Что ж, тогда захотелось перескочить с макетной платы на прямое подключение. И тут возникла. Когда все было распаяно, двигатель опять перестал двигаться. Не понятно до сих пор. Пришлось вернуться к макетной плате. И вот тут возникла вторая проблема. Стоит предварительно было посидеть на форумах или внимательно почитать даташит. Нельзя подключать-отключать двигатель когда на контроллер подано питание!
В результате контроллер A благополучно сгорел. Эта проблема была решена покупкой нового драйвера на eBay. Теперь, уже с учетом накопленного грустного опыта, Nema 17 был подключен к Aи запущен, но Во время вращения ротора двигатель сильно вибрировал. О плавном движении не было и речи. Гугл вновь в помощь. Первая мысль — неправильное подключение обмоток.
Ознакомление с даташитом шагового двигателя и несколько форумов убедили, что проблема не в этом. При неправильном подключении обмоток двигатель просто не будет работать.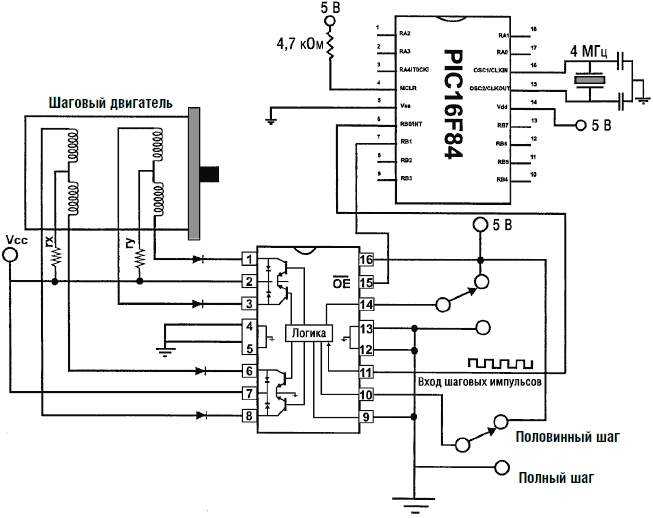 Решение проблемы крылось в скетче. Оказалось, что есть замечательная библиотека для шаговых двигателей, написанная ребятами из Adafruit. Используем библиотеку AcclStepper и шаговый двигатель начинает работать плавно, без чрезмерных вибраций.
Решение проблемы крылось в скетче. Оказалось, что есть замечательная библиотека для шаговых двигателей, написанная ребятами из Adafruit. Используем библиотеку AcclStepper и шаговый двигатель начинает работать плавно, без чрезмерных вибраций.
Второй код для Arduino для обеспечения плавного вращения двигателя. Используется библиотека AccelStepper library. Эта строка повторяется вновь и вновь для непрерывного вращения двигателя. Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже.
В дискуссии часто рождаются новые идеи и проекты! Всегда рады конструктивному сотрудничеству. Со всеми вопросами, пожеланиями и предложениями обращайтесь на почту a.
Arduino и шаговый двигатель Nema Советы для начинающих. Arduino и шаговый двигатель Nema 17 Перед началом очередного проекта на Arduino, было решено использовать шаговый двигатель Nema
Схемы подключения шаговых двигателей
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу. Станки и мехатроника.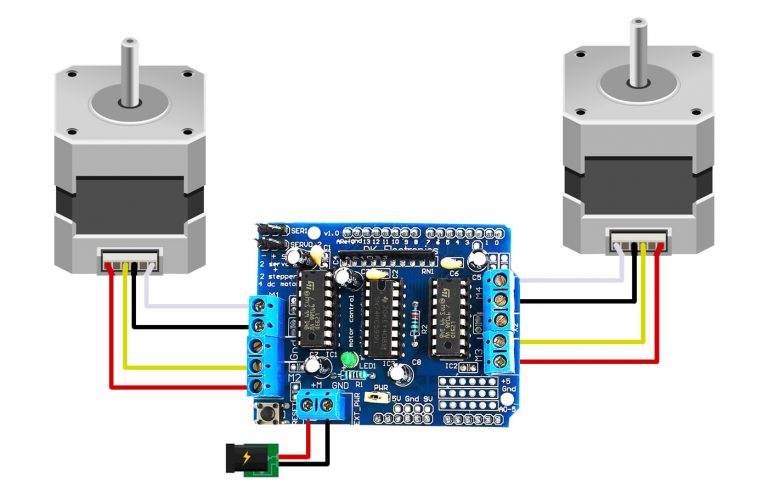 Станки с ЧПУ. Фрезерные станки с ЧПУ 6. Колонные бесконсольные станки с ЧПУ 1. Портальные станки с ЧПУ 4. Токарные станки.
Станки с ЧПУ. Фрезерные станки с ЧПУ 6. Колонные бесконсольные станки с ЧПУ 1. Портальные станки с ЧПУ 4. Токарные станки.
Правильное подключение драйвера шагового двигателя DRV к arduino Минимальная схема подключения драйвера DRV
Главное меню
Для управления шаговыми двигателями используют специальные устройства — драйверы шаговых двигателей. Популярный драйвер шагового двигателя А работает от напряжения В и может обеспечить ток до 1 А на фазу без радиатора. Рисунок 4. Схема подключения для управления скоростью и направлением движения. База знаний. Вконтакте Instagram YouTube. Драйвер шагового двигателя A Драйверы моторов. Обзор драйвера шагового двигателя A
Схемы управления шаговыми двигателями
Шаговый двигатель Arduino предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим устройство и схему подключения шагового двигателя. Шаговый двигатель stepper motor предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала.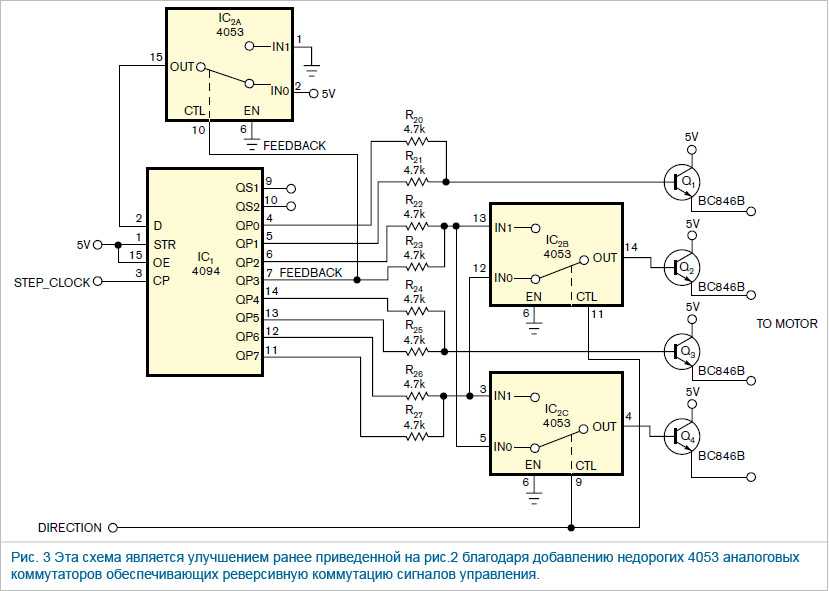 Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.
Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.
Ниже представлена принципиальная схема драйвера биполярных шаговых двигателей с двумя L усиленный 48В, 4А.
Драйвер шагового двигателя A4988
Перед подключением Nema 17, за плечами был определенный опыт работы с шаговиком 24byj48 даташит. Управлялся он и с помощью Arduino, и с помощью Raspberry pi, проблем не возникало. Основная прелесть этого двигателя — цена около 3 долларов в Китае. Причем, за эту сумму вы приобретаете двигатель с драйвером в комплекте. Согласитесь, такое можно даже и спалить, не особо сожалея о содеянном. Теперь появилась задача поинтереснее.
Обратите внимание на следующие товары:
В этой статье мы подключаем шаговый двигатель 28BYJV к Arduino через драйвер шагового двигателя. Она была созданна конкретно для этого шагового двигателя 28BYJV и учитывающая все его индивидуальные параметры. Драйвер управляется через четыре управляющих входа обозначенные как IN1, IN2, IN3, IN4 , именно к ним необходимо подключить соответственно выходы Pin с номерами 8 Pin, 9 Pin, 10 Pin и 11 Pin на плате контроллера Ардуино как это показано на изображении ниже. Загружаем скетч: Для загрузки скетча необходимо в среде разработки Ардуино IDE нажать вкладку новый проект и в открывшиеся окошко поместить скетч приведенный ниже: Скетч, который необходимо загрузить в контроллер через среду разработки Ардуино IDE:. После сохранения он будет доступен для внесения необходимых изменений и корректировок например, для изменения направления вращения двигателя, отмена цикличности вращения или изменения скорости вращения Если по каким либо причинам Вы не смогли самостоятельно разобраться в подключении или программировании шагового двигателя 28BYJ, обратитесь к сотрудникам магазина робототехники и мехатроники — Robot-Kit. Наш сайт: www. Регистрация Забыли пароль?
Загружаем скетч: Для загрузки скетча необходимо в среде разработки Ардуино IDE нажать вкладку новый проект и в открывшиеся окошко поместить скетч приведенный ниже: Скетч, который необходимо загрузить в контроллер через среду разработки Ардуино IDE:. После сохранения он будет доступен для внесения необходимых изменений и корректировок например, для изменения направления вращения двигателя, отмена цикличности вращения или изменения скорости вращения Если по каким либо причинам Вы не смогли самостоятельно разобраться в подключении или программировании шагового двигателя 28BYJ, обратитесь к сотрудникам магазина робототехники и мехатроники — Robot-Kit. Наш сайт: www. Регистрация Забыли пароль?
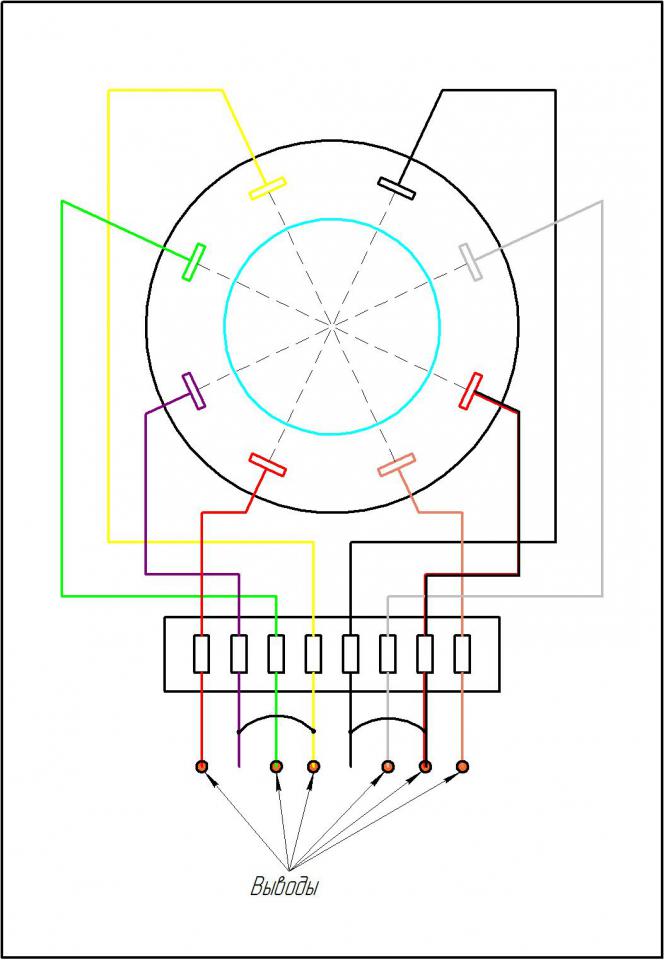
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное.
Драйвер биполярных шаговых двигателей
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.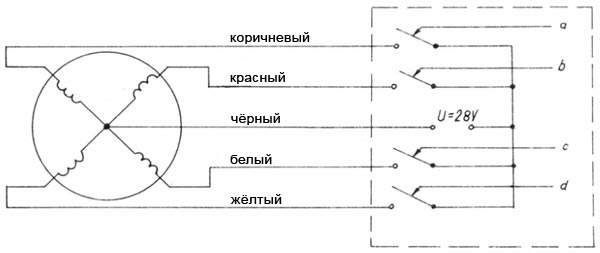 Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора.
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора.
Советы для начинающих. Arduino и шаговый двигатель Nema 17
Добро пожаловать Вход. Корзина Оформление заказа. Используется для управления двигателями типа Nema17 , Nema23 с регулируемым максимальным током фазы до 3А и оптоизолированными входными сигналами. Широко используется в системах ЧПУ и 3D-принтерах. Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом.
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя.
Шаговый двигатель 4 провода подключение
В этой статье мы поговорим о шаговых двигателях в проектах ардуино. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Схема работы шаговых двигетелй, способ подключения к Arduino и примеры скетчей — все это вы найдете в этой статье. Шаговый двигатель — это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора.
Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Схема работы шаговых двигетелй, способ подключения к Arduino и примеры скетчей — все это вы найдете в этой статье. Шаговый двигатель — это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора.
Как работает шаговый электродвигатель?
Теория и практика. Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок. Уроки, книги, видео. Профессиональное обучение и развитие.
Управление биполярным шаговым двигателем.
 Часть 1. Теория. Схема с контроллером PIC12F629 и драйвером LB1838 — radiohlam.ru
Часть 1. Теория. Схема с контроллером PIC12F629 и драйвером LB1838 — radiohlam.ru
- Часть 1. Теория. Схема с PIC12F629 и драйвером LB1838
- Часть 2. Схема с PIC12F629 и драйвером L293D
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д.
Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т.д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5″ дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер.
В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
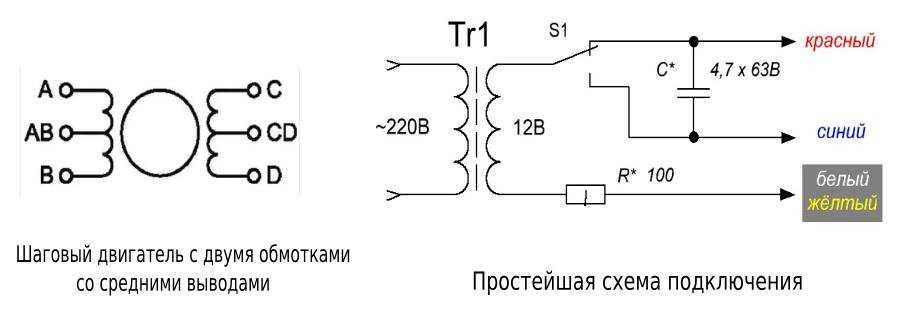
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам.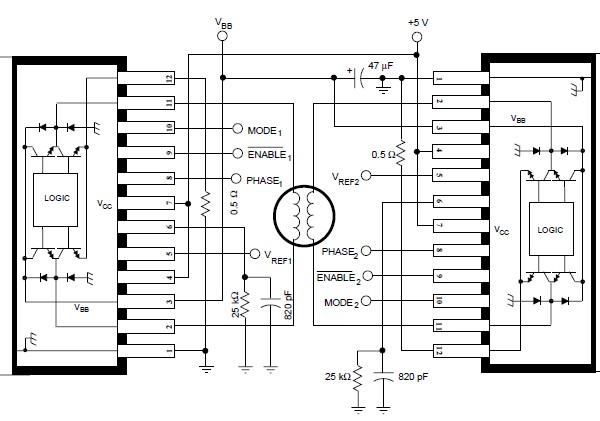 Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя.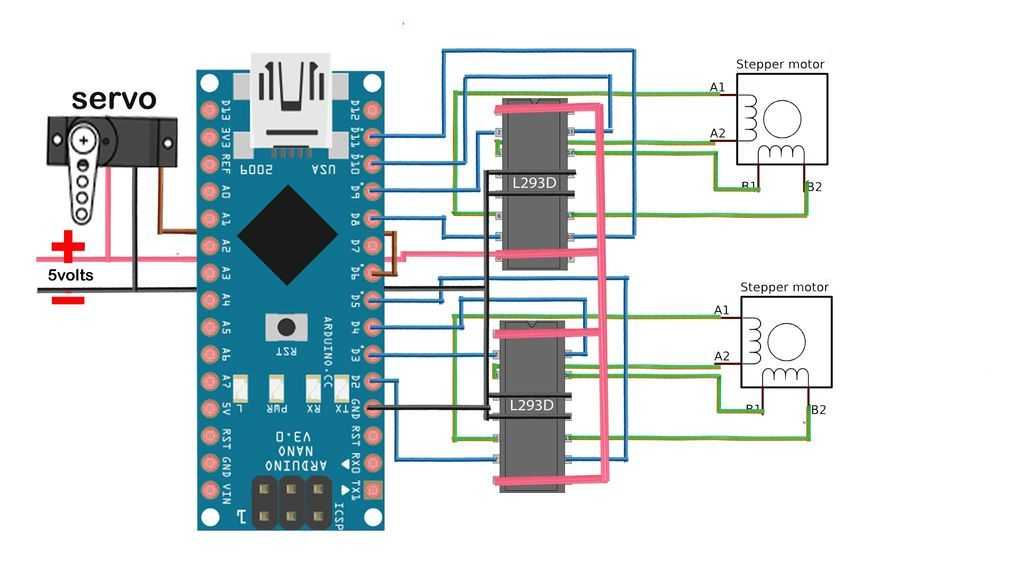 Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т.е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
Если присмотреться к этой диаграмме (слева), то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:
В этом случае наша диаграмма будет выглядеть так:
Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, чтобы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
Схема:
Элементы: R1..R2 = 1 кОм. Когда соответствующая кнопка не нажата — резистор подтягивает напряжение на входе контроллера к +5 В (высокий уровень). При нажатии на кнопку напряжение на входе подтягивается к земле (низкий уровень). С1, С2 = 0,1 мкФ — керамические конденсаторы. С3 = 470 мкФ х 16В — электролитический конденсатор. |
Готовый девайс:
Программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Простейшая программа управления (.asm + .hex)
Скачать плату в формате DipTrace 2.0
Собственно говоря, можно прикрутить сюда программный UART и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
продолжение (для драйвера L293D)…
Принцип работы драйвера шагового двигателя
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.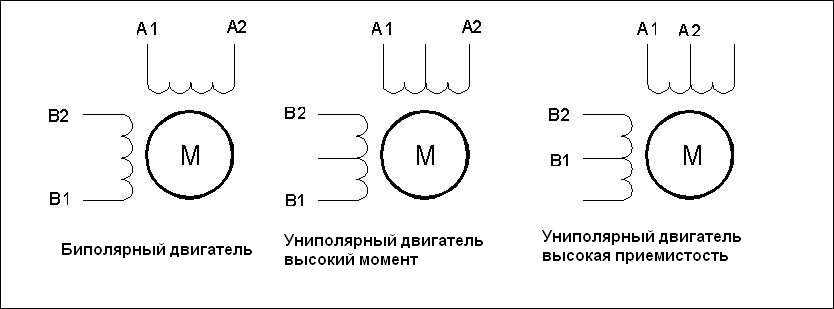
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
 Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
 Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный.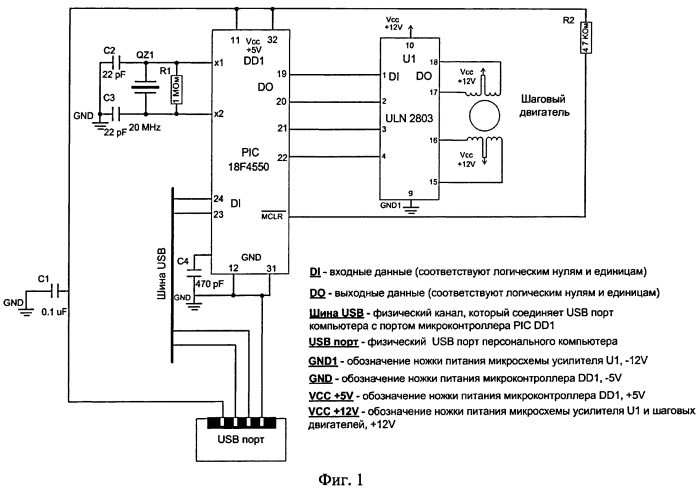 Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
 Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.Блог технической поддержки моих разработок
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Ресурсов современных микроконтроллеров вполне хватает для этого даже в самом ”тяжелом” режиме – микрошаговом.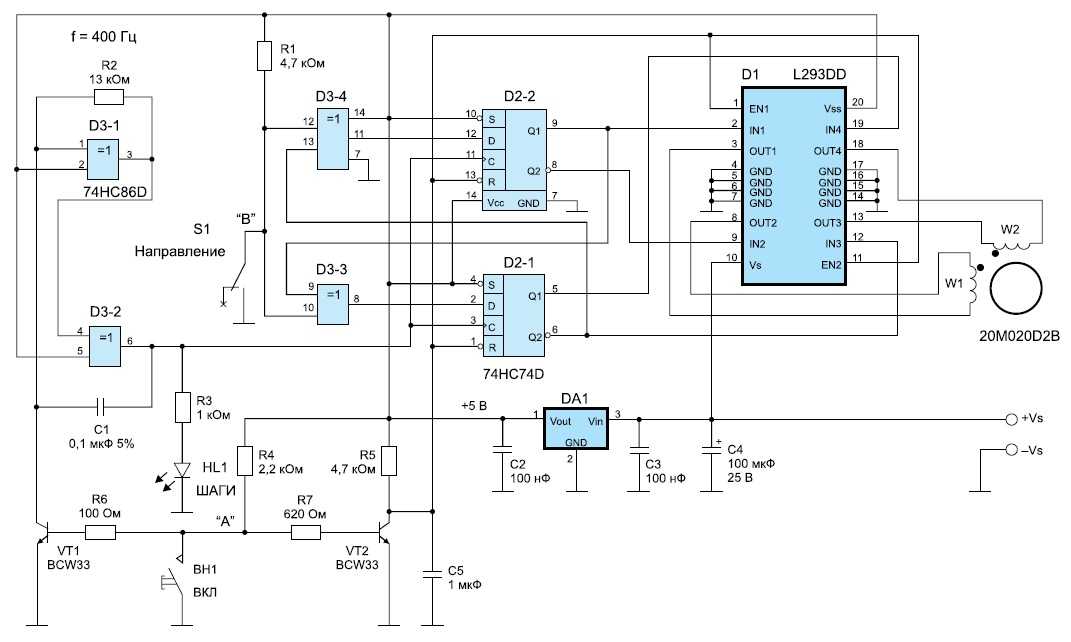
Для подключения шаговых двигателей через слаботочные логические сигналы микроконтроллеров необходимы усилители сигналов – драйверы.
В функцию драйверов входит:
- обеспечение необходимого тока и напряжения на фазных обмотках двигателя;
- коммутация обмоток;
- включение;
- выключение;
- смена полярности;
Речь в этой статье идет о простых драйверах, достаточных для большинства приложений. Существуют драйверы с гораздо большими возможностями:
- обеспечение быстрого нарастания тока при включении и быстрого спада при выключении;
- уменьшение тока для фиксации положения остановленного двигателя;
- защитные функции;
- формирование тока и напряжения обмоток для микрошагового режима;
- и многие другие.
Схемы таких драйверов достаточно сложные, а в этих функциях в большинстве приложениях нет необходимости.
По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Драйверы для этих двух вариантов двигателей принципиально отличаются.
Драйвер униполярного шагового двигателя.
В униполярном режиме могут работать двигатели, имеющие следующие конфигурации обмоток.
Напомню принцип управления униполярным шаговым двигателем. Четыре обмотки с общим проводом, подключенным к одному полюсу источника питания. Если другие выводы обмоток последовательно коммутировать к другому полюсу источника, то ротор двигателя будет вращаться.
Для коммутации обмоток таким способом достаточно всего четырех ключей, замыкающих обмотки на землю. Схемы коммутации обмоток двух предыдущих вариантов двигателей выглядят так.
Если последовательно замыкать ключи 1, 2, 3, 4, то ротор двигателя будет вращаться.
Схема драйвера униполярного шагового двигателя.
Практически ключи можно выполнить на биполярных транзисторах, но предпочтительнее использовать низкопороговые MOSFET транзисторы. Я применяю транзисторы IRF7341. Это MOSFET транзисторы с параметрами:
Я применяю транзисторы IRF7341. Это MOSFET транзисторы с параметрами:
- максимально допустимый ток 4 А;
- предельное напряжение 55 В;
- сопротивление в открытом состоянии 0,05 Ом;
- порог включения 1 В;
- выполнены в миниатюрном корпусе SO-8;
- в корпусе два транзистора.
Крайне удобный вариант для использования в драйвере униполярного шагового двигателя.
- Нет необходимости в радиаторах охлаждения ключей;
- очень низкое падение напряжения на открытом транзисторе;
- малые размеры;
- всего два 8ми выводных корпуса для драйвера двухфазного шагового двигателя.
На биполярных транзисторах ключи с такими параметрами создать не возможно. Есть много других вариантов MOSFET транзисторов для ключей, например IRF7313 ( 6 А, 30 В, 0,029 Ом).
Схема ключа на MOSFET транзисторе для одной фазы выглядит так.
Ключ управляется непосредственно от микроконтроллера логическими уровнями KMOП или TTL ( 0 / +5 В). При управляющем сигнале высокого уровня (+5 В) ключ открыт, и через обмотку фазы идет ток. Диод шунтирует обмотку двигателя в обратном направлении. Он необходим для защиты транзистора от бросков напряжения самоиндукции при выключении фазы. Для управления двигателями на значительных скоростях вращения, лучше использовать высокочастотные диоды, например, FR207.
При управляющем сигнале высокого уровня (+5 В) ключ открыт, и через обмотку фазы идет ток. Диод шунтирует обмотку двигателя в обратном направлении. Он необходим для защиты транзистора от бросков напряжения самоиндукции при выключении фазы. Для управления двигателями на значительных скоростях вращения, лучше использовать высокочастотные диоды, например, FR207.
Вот фрагмент схемы подключения униполярного шагового двигателя к микроконтроллеру.
Защиты от коротких замыканий в этой схеме нет. Реализация защиты значительно усложняет драйвер. А замыканий обмоток шаговых двигателей практически не бывает. Я не встречался с таким явлением. Да и на фоне неприятности по поводу сгоревшего дорогого двигателя, замена транзистора не выглядит проблемой.
Кстати, механическое заклинивание вала шагового двигателя не вызывает недопустимых токов в ключах драйвера и защиты не требует.
А это изображение платы контроллера униполярного шагового двигателя с PIC контроллером фирмы Microchip.
Простая плата с восьми разрядным микроконтроллером PIC18F2520 управляет:
- двумя шаговыми двигателями с током фазы до 3 А;
- двумя ШИМ ключами для электромагнитов;
- считывает состояние 4х датчиков;
- обменивается данными по сети с центральным контроллером.
Несмотря на простоту контроллера, реализованы следующие режимы управления:
- полно-шаговый, одна фаза на полный шаг;
- полно-шаговый, две фазы на полный шаг;
- полу-шаговый;
- фиксацию положения двигателя при остановке.
К достоинствам управления шаговым двигателем в униполярном режиме следует отнести:
- простой, дешевый, надежный драйвер.
- в униполярном режиме крутящий момент примерно на 40 % меньше по сравнению с биполярным режимом.
Драйвер биполярного шагового двигателя.
В биполярном режиме могут работать двигатели, имеющие любые конфигурации обмоток.
У биполярного двигателя по одной обмотке для каждой фазы. Обычно две обмотки AB и CD. В первых двух вариантах четыре обмотки соединяются так, что получается две. Обмотки по очереди подключаются к источнику питания в одной полярности, затем в другой.
Обычно две обмотки AB и CD. В первых двух вариантах четыре обмотки соединяются так, что получается две. Обмотки по очереди подключаются к источнику питания в одной полярности, затем в другой.
Драйвер биполярного двигателя должен обеспечивать сложную коммутацию. Каждая обмотка:
- подключается в прямой полярности к источнику напряжения;
- отключается от источника напряжения;
- подключается с противоположной полярностью.
Схема коммутации одной обмотки биполярного двигателя выглядит так.
Для обеспечения двух полярных коммутаций от одного источника питания требуется 4 ключа. При замыкании 1 и 2 ключей обмотка подключается к источнику питания в прямой полярности. Замыкание 3 и 4 ключей подает на обмотку обратную полярность напряжения.
Сложность драйвера биполярного шагового двигателя вызвана не только большим числом ключей ( 4 ключа на обмотку, 8 ключей на двигатель), но и:
- сложное управление верхними ключами ( 1 и 4) от логических сигналов “привязанных” к земле;
- проблемы со сквозными токами при одновременном открывании ключей одного плеча ( 1,3 или 2,4).

Сквозные токи могут возникать из-за не одинакового быстродействия нижнего и верхнего ключа. К примеру, нижний ключ уже открылся, а верхний – не успел закрыться.
Схема драйвера биполярного шагового двигателя.
Реализовать схему драйвера биполярного шагового двигателя на дискретных элементах довольно сложно. Могу показать мою схему, которая подключает биполярный двигатель к униполярному драйверу. Эта схема используется для управления биполярными двигателями от контроллера, приведенного в качестве примера в предыдущей главе.
Схема достаточно простая. Проблема сквозных токов решается за счет резисторов 0.22 Ом в коммутируемых цепях. В момент коммутаций MOSFET транзисторов, верхний и нижний ключ оказываются одновременно открытыми на короткое время. Эти резисторы и ограничивают сквозной ток. К сожалению, они ограничивают и рабочий ток двигателя. Поэтому, несмотря на мощные транзисторы, драйвер по такой схеме можно использовать для токов коммутации не более 2 А. Схема не требует диодов для защиты от эдс самоиндукции обмоток, потому что эти диоды интегрированы в MOSFET транзисторы.
Схема не требует диодов для защиты от эдс самоиндукции обмоток, потому что эти диоды интегрированы в MOSFET транзисторы.
Гораздо удобнее и практичнее использовать интегральные драйверы биполярного шагового двигателя. Самым распространенным из них является микросхема L298N.
Драйвер биполярного шагового двигателя L298N.
Описания этой микросхемы на русском языке практически нет. Поэтому привожу параметры L298N достаточно подробно, по официальным материалам производителя этой микросхемы – компании STMicroelectronics (datasheet l298n.pdf).
L298N это полный мостовой драйвер для управления двунаправленными нагрузками с токами до 2 А и напряжением до 46 В.
- Драйвер разработан для управления компонентами с индуктивными нагрузками, такими как электромагниты, реле, шаговые двигатели.
- Сигналы управления имеют TTL совместимые уровни.
- Два входа разрешения дают возможность отключать нагрузку независимо от входных сигналов микросхемы.
- Предусмотрена возможность подключения внешних датчиков тока для защиты и контроля тока каждого моста.
- Питание логической схемы и нагрузки L298N разделены. Это позволяет подавать на нагрузку напряжение другой величины, чем питание микросхемы.
- Микросхема имеет защиту от перегрева на уровне + 70 °C.

Структурная схема L298N выглядит так.
Микросхема выполнена в 15ти выводном корпусе с возможностью крепления радиатора охлаждения.
Назначение выводов L298N.
| 1 | Sense A | Между этими выводами и землей подключаются резисторы – датчики тока для контроля тока нагрузки. Если контроль тока не используется, они соединяются с землей. |
| 15 | Sense B | |
| 2 | Out 1 | Выходы моста A. |
| 3 | Out 2 | |
| 4 | Vs | Питание нагрузки. Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ.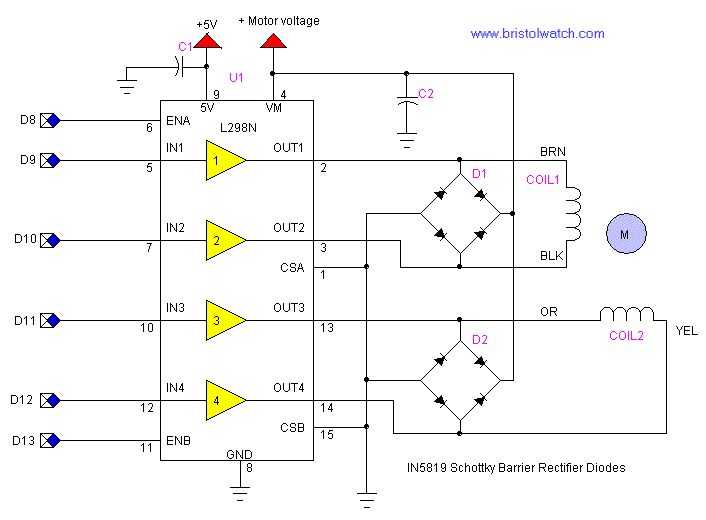 |
| 5 | In 1 | Входы управления мостом A. TTL совместимые уровни. |
| 7 | In 2 | |
| 6 | En A | Входы разрешения работы мостов. TTL совместимые уровни. Низкий уровень сигналов запрещает работу моста. |
| 11 | En B | |
| 8 | GND | Общий вывод. |
| 9 | Vss | Питание логической части микросхемы (+ 5 В). Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ. |
| 10 | In 3 | Входы управления мостом B. TTL совместимые уровни. |
| 12 | In 4 | |
| 13 | Out 3 | Выходы моста B. |
| 14 | Out 4 |
Предельно допустимые параметры L298N.
| Обозначение | Параметр | Значение |
| Vs | Напряжение питания | 50 В |
| Vss | Напряжение питания логики | 7 В |
| Vi, Ven | Напряжение логических входов | -0,3. 7 В 7 В |
| Io | Выходной ток (для каждого канала) |
- не повторяющийся импульс 100 мкс
- импульсы (80% включен, 20% выключен, включен 10 мс)
- при постоянном токе
2 А
Параметры расчетов тепловых режимов.
| Обозначение | Параметр | Значение |
| Tth j-case | Тепловое сопротивление кристалл-корпус | 3 ºC/Вт |
| Tth j-amb | Тепловое сопротивление кристалл-окружающая среда | 35 ºC/Вт |
Электрические характеристики драйвера L298N.
| Обозначение | Параметр | Значение |
| Vs | Напряжение питания (вывод 4) | Vih+2. 5 . 46 В 5 . 46 В |
| Vss | Питание логики | 4,5. 5 . 7 В |
| Is | Потребляемый ток покоя (вывод 4) |
- Ven=H, Vi=L
- Ven=H, Vi=H
- Ven=L
13 . 22 мА
50 . 70 мА
4 мА
- Ven=H, Vi=L
- Ven=H, Vi=H
- Ven=L
24 . 36 мА
7 . 12 мА
6 мА
(выводы 5, 7, 10, 12, 6, 11)
(выводы 5, 7, 10, 12, 6, 11)
(выводы 5, 7, 10, 12, 6, 11)
(выводы 5, 7, 10, 12, 6, 11)
- при токе 1 А
- при токе 2 А
0,95. 1,35. 1,7 В
1,35. 1,7 В
2 . 2,7 В
- при токе 1 А
- при токе 2 А
0,85. 1,2. 1,6 В
1,7 . 2,3 В
открытых ключах
- при токе 1 А
- при токе 2 А
1,8 . 4,9 В
(выводы 1, 15)
Схема подключения шагового двигателя к микроконтроллеру с помощью драйвера L298N.
Диаграмма работы этой схемы в полношаговом режиме выглядит так.
Если не используются разрешающие входы и датчики тока, схема выглядит так.
По функциям это аналог контроллера описанного в главе про униполярные двигатели, только для биполярного. Он также собран на PIC контроллере фирмы Microchip и управляет двумя биполярными шаговыми двигателями с током фаз до 2 А. Функциональные возможности и режимы управления двигателем те же.
Функциональные возможности и режимы управления двигателем те же.
К достоинствам управления шаговым двигателем в биполярном режиме следует отнести:
- крутящий момент примерно на 40 % больше по сравнению с униполярным режимом.
- можно подключать шаговые двигатели с любой конфигурацией обмоток.
Блог о электронике
| Первая модификация силового блока. L293 вытащена. |
| Вид снизу |
Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями . Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции.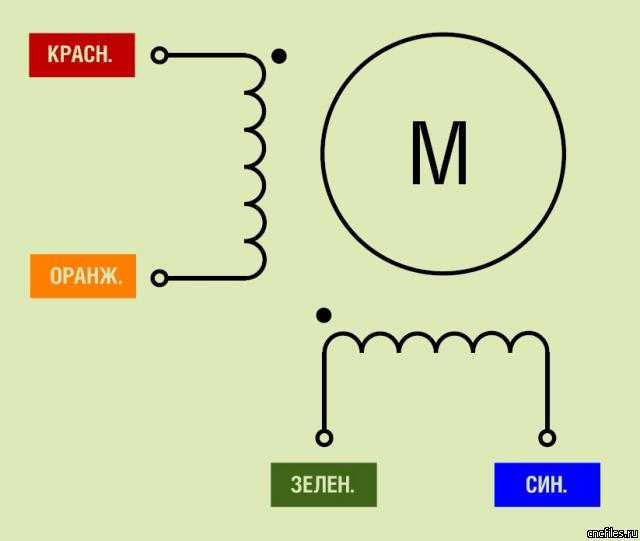 Кроме того, существуют полушаговый и микрошаговый режим , когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Кроме того, существуют полушаговый и микрошаговый режим , когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Униполярный отличается от биполярного только тем, что ему нужна куда более простая схема управления, а еще у него значительно слабее момент. Так как работает он только половинами обмоток. НО! Если оторвать нафиг средний вывод униполярника, то мы получим обычный биполярный . Определить какой из выводов средний не сложно, достаточно прозвонить сопротивление тестером. От среднего до крайних сопротивление будет равно ровно половине сопротивления между крайних выводов. Так что если тебе достался униполярник, а схема подключения для биполярного, то не парься и отрывай средний провод.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры . Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297 , а в доке на L297 на L298N .
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INh2 и INh3 , а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298 , подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.

 Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.Правда на будущее, когда я буду делать роботу шаговый привод, я возьму не связку L297+L293 , а микруху L6208 которая может и чуть слабей по току, но зато два в одном! Сразу подключай двигатель и работай. Если же их покупать, то на L6208 получается даже чуть дешевле.
197 thoughts on “Управление шаговым двигателем”
А можешь посоветовать шаговик из тех, которые сейчас можно купить?
Я не знаю как у всех, но я д аже двухдюймовые флопики повыкидывал лет пять назад, а 5-ти дюймовых и в помине не было.
По продаваемым не в курсе. В нашей деревне их в продаже нету, а что там в Московии я даже не знаю.
В нашей деревне их в продаже нету, а что там в Московии я даже не знаю.
Оппа, теперь самое время разбираться, что за шаговики у меня имеются по результатам годового потрошения CD-DVD ROM’ов. 🙂
А в сидюках/дивдюках вроде бы стоят обычные коллекторники+синхронный на шпиндель. Хотя могут быть и шаговики, но я не встречал ни разу.
Шаговики во многих CD/DVD приводах стоят — для таскания каретки с лазером (у меня минимум 3 таких экземпляра валяются). Но конструкция двигателя — как в трехдюймовых дисководах, для практического применения неудачная.
ну когда я расотрошил сиди ром там был безколлекторник + еще какойто на шпиндель
для безколлекторника я думаю применение в моделизме
http://forum.rcdesign.ru/index.php?showtopic=12183&st=560
может пригодится кому
http://forum.rcdesign.ru/index.php?showtopic=12183&st=560
может чем пригодится там модельный регултор хода
может управлять сдромным безколлекторником
работал с шаговыми движками на своей фирме.
ещё с нашими совеццкими и руссийскими.
сколько раз коротыш верещал на источниках — не счесть ) единственное оправдание — я про них ещё тогда ничего не знал и доков не имел. работал методом тыка…
всё хорошо, но нету обратной связи.
зы! от постоянных замыканий избавлялись частыми переключениями обмоток, когда надо было застопорить двигло.
. в смысле от постоянных замыкани? Как ты умудрялся его коротнуть? Одновременным замыканием ключей верхнего и нижнего плеча? Так там Dead Time надо ставить!
юзал четырёхконтактный.
помню, что если подавать на обмотки долгое время неизменный сигнал, то будет такое.
хотя потом, когда пришёл паспорт на движок, то там было сказано, что можно так стопорить его.
Долгая подача напруги на обмотки это его нормальный рабочий режим. Главное чтобы напряжение было номинальным.
Полезно, спасибо. Мне в свое время довелось раскурочить 8″ дисковод. Два шаговика лежат дожидаются своего часа. Так, что информация может пригодиться.
У меня этих дисководов полтора десятка штук!
Есть интересная статья по использованию шаговых двигателей
Журнал Современная электроника Октябрь 2004 г. стр. 46-47
Автор: Олег Пушкарев, Омск, конструкция на базе PIC16F84 и
драйвера — ULN2003A. (WWW.SOEL.RU)
Журнал очень рульный, советую почитать, статьи высылают
по почте, по запросу или подписка (в том числе бесплатная).
Еще одна задача — управление двигателем
постоянного тока на 24 в (12В), реверс,
управление скоростью. Есть буржуйская схема,
но без регулятора, могу тиснуть, схема из
стриммера, реверс-технология схемы.
кто знаком с драйвером шины ULN2804a b ULN2004a , какая разници между ними.
Кажется, один для КМОП, другой — для ТТЛ. Схема отличается только номиналом сопротивления от входного штырька до базы транзистора. В одном случае — 10ком (для КМОП), в другом — кажется, 1,5 ком, точно не помню. Ну, и входные уровни соответственно разные. В остальном — одинаково. Я сам года три назад выбирал, какие брать. А использую все же чаще ULN2003 (привычка, чтоли)…
Я сам года три назад выбирал, какие брать. А использую все же чаще ULN2003 (привычка, чтоли)…
У меня есть движок от древнего лазерного принтера. Двигатель фирмы CANON PM60-h518Z21B можно ли запустить таку вещь? Торчат из него по 3 провода с каждой обмотки. P.S. С шаговиками я делов не имел пока, но очень интересно.
Думаю без проблем. Судя по признакам это униполярный двигатель. Так что определяй где у него середина обмотки и дальше как я описал. Тока замерь сопротивление, чтобы узнать максимальный ток.
Гайд по шаговому двигателю NEMA 17 Размеры, разводка выводов
Шаговый двигатель NEMA 17 представляет собой бесщеточный электродвигатель постоянного тока, который делит полный оборот на равные шаги. Он подходит для приложений, где требуется точное движение. В этой статье мы обсудим шаговый двигатель NEMA-17, его применение и распиновку двигателя. Мы также подробно обсудим некоторые его технические характеристики.
Что такое NEMA?
NEMA расшифровывается как «Национальная ассоциация производителей электрооборудования». Это организация, которая устанавливает стандарты для компаний, производящих электротехническую продукцию и/или оборудование в различных секторах. Эта стандартизация устраняет некоторые распространенные недопонимания между пользователями и производителями электротехнической продукции и улучшает состояние электротехнического производства.
Это организация, которая устанавливает стандарты для компаний, производящих электротехническую продукцию и/или оборудование в различных секторах. Эта стандартизация устраняет некоторые распространенные недопонимания между пользователями и производителями электротехнической продукции и улучшает состояние электротехнического производства.
Содержание
- Что такое NEMA?
- NEMA 17 Stepper Motor
- Технические характеристики NEMA 17
- NEMA 17 Размеры шагового двигателя
- NEMA 17 Шаповый мотор. Двигатель
NEMA 17 представляет собой гибридный шаговый двигатель, который вращается с углом шага 1,8 градуса. Таким образом, чтобы совершить один оборот, вал делает 200 шагов. Термин «гибрид» означает, что это комбинация шагового двигателя с постоянным магнитом и переменным сопротивлением. Шаговые двигатели NEMA 17 с размерами 1,7 x 1,7 дюйма (42 x 42 мм) спроектированы так, чтобы обеспечивать больший крутящий момент, чем меньшие варианты, такие как шаговый двигатель NEMA 14.
Шаговый двигатель NEMA 17
Как и любой другой двигатель, шаговый двигатель NEMA 17 состоит из статора и ротора. Ротор двигателя NEMA 17 представляет собой постоянный магнит с 50 зубьями по окружности. Статор — это просто электромагнит с 48 зубьями. Они объединены в четыре пары групп, каждая из которых может управляться возбуждением постоянным током. Итак, когда мы возбуждаем пары катушек статора с помощью микроконтроллера, ротор вращается с плавным ступенчатым углом.
Спецификации NEMA 17
Технические характеристики для 6-фазного (4 В, 1,2a) NEMA 17 Stepper Motor перечислены в таблице ниже:
Параметр Значение 414141 4414141 40044 40044 40041444. Rated Current/phase 0.95A Step Angle 1.8° No. of Phases 4 Phase Resistance 3. 3ohmInductance 4mH Length 33mm Rotor Inertia 35g-cm 2 Shaft Diameter Φ5mm Shaft Length 22mm Размер корпуса 42 x 42 мм Униполярный удерживающий момент 2,59 кг-см (36 унций-дюйм) Точность сопротивления 10%
0044 Точность индуктивности 20% Точность угла шага ±5% (полный шаг, без нагрузки) Макс. (номинальный ток, 2 фазы) Температура окружающей среды -10°C ~ +50°C Сопротивление изоляции 100 МОм Мин. 500 В пост. тока Диэлектрическая прочность 500 В перем. тока • 5 мА в течение одной минуты Радиальный зазор вала 0,06 Макс. (нагрузка 450 г)Осевой зазор вала 0,08 Макс. (нагрузка 450 г) Характеристики шагового двигателя NEMA 17
Размеры шагового двигателя NEMA 17
Размеры шагового двигателя NEMA 17
Двигатель NEMA 17 имеет размеры лицевой панели 1,7 на 1,7 дюйма (43 мм × 43 мм). В зависимости от производителя другие размеры двигателя могут измениться, но размеры лицевой панели останутся прежними. Как и для описанного выше 6-проводного 2-фазного (4 В, 1,2 А) шагового двигателя NEMA 17, длина двигателя составляет 33 мм, диаметр вала — Φ5 мм, а длина вала — 22 мм. Если взять такой же мотор от другого производителя, то эти значения могут отличаться.
Схема контактов шагового двигателя NEMA 17
В зависимости от модели шаговый двигатель NEMA 17 может иметь 4, 5 или 6 проводов. Модели с 5 и 6 проводами являются униполярными шаговыми двигателями, а модель с 4 проводами — биполярными шаговыми двигателями.
Униполярные двигатели
Униполярный шаговый двигатель имеет два набора обмоток, расположенных перпендикулярно друг другу.
Такое расположение обмоток создает вращающееся магнитное поле для ротора.6-проводной шаговый двигатель
Если центральные ответвления берутся из каждой обмотки катушки, двигатель становится 6-проводным шаговым двигателем, и полученное таким образом расположение показано на рисунке ниже. Используя этот метод, мы создали четыре фазы вместо двух. Теперь каждая секция этой обмотки может быть запитана, исходя из необходимого для ротора угла шага.
Разводка 6-проводного шагового двигателя NEMA 17
В таблице ниже приведены выводы 6-проводного шагового двигателя.
Номер провода Wire type Wire color 1 The first end of Coil 1 Red 2 Centre-tap Black 3 The second end of Coil 1 Red/White 4 The first end of Coil 2 Green 5 Centre-tap White 6 Второй конец катушки 2 Зеленый/белый Назначение контактов 6-проводного шагового двигателя
5-проводного шагового двигателя
В приведенной выше конструкции каждый центральный отвод служит общим проводом для двух фаз.
Но если мы соединим оба центральных ответвления вместе, чтобы создать общий провод для всех четырех фаз, управление станет проще. Таким образом, двигатель становится 5-проводным шаговым двигателем, расположение обмоток которого показано на рисунке ниже.Распиновка 5-проводного шагового двигателя NEMA 17
В таблице ниже приведены выводы 5-проводного шагового двигателя.
Wire Number Wire type Wire color 1 The first end of Coil 1 Red 2 Centre-tap (common to обе катушки) Черный 3 Второй конец катушки 1 Красный/белый 4 Первый конец катушки 2 Зеленый 5 Второй конец катушки 2 Зеленый/белый . Рукоя наборы обмоток без центральных ответвлений, поэтому у него всего 4 провода.
Управление биполярным двигателем становится затруднительным, поскольку для изменения направления тока в обмотке требуется Н-мост. (Подробнее)Схема обмотки 4-проводного шагового двигателя показана на рисунке ниже.
Выводы 4-проводного шагового двигателя NEMA 17
В таблице ниже приведены выводы 4-проводного шагового двигателя.
Wire Number Wire type Wire color 1 The first end of Coil 1 Red 2 The second end of Coil 1 Желтый 3 Первый конец катушки 2 Черный 4 Второй конец катушки 2 Оранжевый Выводы 4-проводного шагового двигателя
Примечание. Цвет провода, обозначающий каждую катушку/центральный отвод, может не соответствовать действительности для всех моделей.
В зависимости от производителя и типа модели цвет проводов может быть разным. Применение шагового двигателя NEMA 17
Как обсуждалось выше, шаговые двигатели NEMA 17 имеют высокий удерживающий момент. Несмотря на то, что некоторые двигатели имеют разомкнутую систему, их точность высока и подходит для приложений с высоким крутящим моментом и ускорением от низкого до среднего. Вот некоторые из распространенных применений этих двигателей:
- Факс Машины
- Маленькая робототехника
- Игровые машины
- Медицинская визуализация
- Copiers
- 3D Printing Equipment
- Printile Matchines
- . обсуждалось выше, шаговый двигатель NEMA 17 производится разными производителями. Если вы ищете общие и электрические характеристики для различных моделей NEMA 17, нажмите здесь.
Щелкните здесь, чтобы загрузить техническое описание шагового двигателя NEMA 17 производства Schneider Electric.
Часто задаваемые вопросы
Какова скорость вращения шагового двигателя NEMA 17?
Шаговые двигатели лучше всего работают при скорости примерно 1200 об/мин или ниже.
Хотя можно увеличить скорость небольшого шагового двигателя с помощью более мощного контроллера, это сократит срок службы двигателя.
Примечание: В шаговом двигателе максимальный крутящий момент создается при нулевой скорости. Однако крутящий момент падает по мере увеличения скорости.Максимальная скорость, с которой может работать шаговый двигатель NEMA 17 без обратной связи, составляет 2000 об/мин. Но рекомендуемый диапазон скоростей составляет 200-600 об/мин. В то время как для шагового двигателя NEMA 17 с замкнутым контуром максимальная скорость составляет 3000 об/мин. Для этого рекомендуемый диапазон скорости составляет 200-700 об/мин.
Насколько мощный шаговый двигатель Nema?
Двигатель считается надежным, если он обеспечивает высокий удерживающий момент. Для разных версий шагового двигателя NEMA 17 удерживающий момент варьируется от 2 кг-см до 5 кг-см. В то время как ток колеблется от 0,7 Ампер до 1,7 Ампер.
Благодаря более высокому крутящему моменту эти двигатели используются в 3D-принтерах, станках с ЧПУ, робототехнике и других промышленных приложениях. Все ли шаговые двигатели NEMA 17 одинаковы?
Номера NEMA обозначают стандартные размеры лицевой панели, на которой установлен двигатель. Никаких других характеристик мотора в нем не указывается. Это означает, что при наличии двух разных двигателей NEMA 17 они могут иметь совершенно разные технические характеристики и не могут использоваться вместо друг друга.
Стандартизация NEMA обеспечивает взаимозаменяемость, т. е. возможность перехода от одного производителя к другому без хлопот по замене различных частей двигателя, таких как муфты, монтажные кронштейны и т. д. Но, если мы возьмем шаговый двигатель NEMA 17, разработанный двух разных производителей, есть вероятность, что эти два двигателя могут иметь разные электрические или механические характеристики. Такие как длина и диаметр стержня, количество подводящих проводов и многое другое.
Поэтому перед установкой двигателя в любом приложении рассмотрите все спецификации шагового двигателя NEMA от двух разных производителей.
Что означает NEMA 17?
Номер после двигателей NEMA указывает размеры двигателя на паспортной табличке. В общем, для двигателя NEMA XX, разделив XX на 10, вы получите диаметр лицевой панели в дюймах. Следовательно, шаговый двигатель NEMA 17 имеет диаметр 1,7 дюйма. Размеры шагового двигателя NEMA 17 составляют 1,7 на 1,7 дюйма (43 мм × 43 мм).
В 3D-принтерах используются шаговые или серводвигатели?
Обычно в 3D-принтерах используются шаговые двигатели из-за их простого и точного управления. Это связано с тем, что шаговые двигатели имеют разомкнутую систему. Концевой выключатель можно использовать для создания исходного положения шагового двигателя, и, таким образом, путем подсчета шаговых импульсов можно управлять движением двигателя.
С другой стороны, серводвигатели работают в замкнутой системе.
Им требуется постоянная обратная связь для управления положением печатающей головки. Таким образом, требуется сложное аппаратное обеспечение, и управление становится затруднительным.Но да, мы также можем управлять 3D-принтерами с серводвигателями.
Является ли NEMA 17 биполярным или однополярным?
Шаговый двигатель NEMA 17 может быть униполярным или биполярным. Это можно узнать, проверив характеристики двигателя. Один простой способ убедиться в этом — подсчитать количество проводов, доступных для управления двигателем. Если есть четыре провода, двигатель является биполярным шаговым двигателем. А если количество проводов пять или шесть, то это униполярный шаговый двигатель.
Электрическая проводка —
Указания по технике безопасности
При подключении электронных компонентов принтера вы будете работать с проводкой сетевого напряжения (120 В / 220 В переменного тока). Всегда дважды проверяйте, чтобы принтер был отключен от сети, а конденсаторы в блоках питания разряжены, прежде чем прикасаться к какому-либо проводу или клемме.
Приведенные здесь рекомендации, как правило, основаны на предосторожности для предотвращения пожаров.
Риск повреждения
Никогда не подключайте и не отключайте никакие устройства, когда принтер включен. Помимо того, что это представляет угрозу безопасности, очень легко повредить электронные компоненты. В частности, драйверы шаговых двигателей могут быть легко повреждены при подключении или отключении шаговых двигателей при включенном питании.
Наконечники
Разъемы
Рекомендуемые разъемы MicroFit 3.0 рассчитаны на ток до 5 А и должны использоваться для всех подключений к шаговым двигателям, хотэндам и концевым выключателям. Разъемы JST используются для подключения к плате(ам) MCU. Разъемы JST недоступны в качестве разъемов для промежуточных проводов, поэтому их необходимо смешивать. Добавление разъемов Molex ко всем шаговым двигателям полезно. Используйте 3-контактный разъем MLX (см. официальное руководство по поиску поставщиков), чтобы можно было снимать кровать без прямого отсоединения от SSR.
Термистор может использовать 2-контактный разъем Microfit.Штифты Microfit
При сборке соединителей Microfit вилочные штифты вставляются в гнездовые корпуса, а гнездовые штифты вставляются в штыревые корпуса.
Для более крупных проводов, таких как проводка картриджа нагревателя, полезно использовать термоусадочную трубку.
Тросы
Силиконовая проводка была выбрана, потому что она имеет большое количество жил, что означает более высокую усталостную долговечность. Силиконовая изоляция выдерживает нагрев и является более гибкой, что хорошо в условиях высокой подвижности. Он менее подвержен зацеплению за другие провода или стены внутри кабельной цепи. Перед установкой цепей проверьте кабельный жгут.
Провода из ПТФЭ или Хелуфлона представляют собой премиальный вариант, поскольку они имеют более тонкую изоляцию и более низкий коэффициент трения, что увеличивает способность к изгибу и снижает износ. Но эти преимущества наиболее полезны в принтерах, использующих кабельные цепи.
Для принтеров с кабелем пуповины (V0 Toolhead, Legacy) они могут оказаться излишними. Можно использовать кабель автоматизации, такой как IGUS, но необходимо проверить минимальный радиус изгиба кабеля, поскольку типичный радиус изгиба для кабельных цепей Voron очень мал.Конкретные значения см. в разделе «Длина кабеля и количество». Не уменьшайте сечение проводов нагревателя горячего конца, они увеличены по соображениям безопасности.
Вы можете добавить дополнительные провода к своим кабельным цепям в качестве замены в случае обрыва провода. Тем не менее, эти кабели будут нагреваться/охлаждаться и перемещаться столько же, сколько и ваши кабели под напряжением, и могут порваться уже тогда, когда они вам понадобятся! Поэтому может быть лучше оставить дополнительные провода в качестве запасных вне принтера.
Купите несколько держателей кабелей (например, с клеем), чтобы упорядочить кабели в отсеке для электроники. Имейте в виду, что клей со временем разрушается из-за воздействия температуры выше комнатной.
Кабели можно спрятать в направляющих. Опционально распечатайте крышки кабелей для рельсов.Проводка шагового двигателя
Нет стандарта ни по цвету проводов на шаговых двигателях, ни по порядку проводов в разъеме. В результате часто приходится перезаказывать провода шагового двигателя даже на двигателях, продаваемых специально для использования в Воронах . Если вы используете моторы, соответствующие спецификациям, цвета, показанные в руководствах по подключению, должны работать, однако в любом другом случае вам следует проверить электропроводку вашего двигателя. Все платы управления, используемые в настоящее время с voron, предполагают, что одна обмотка должна быть подключена к контактам 1 и 2, а другая — к контактам 3 и 4. Обратите внимание, что другие детали, такие как идентификация обмотки A и обмотки B, не имеют решающего значения. В худшем случае ваш двигатель будет работать в обратном направлении, что вы легко сможете исправить позже с помощью программного обеспечения.
Идентификация обмоток
Существует 3 основных варианта идентификации обмоток: 1) Проверить документацию. Многие двигатели поставляются с карточкой, на которой указано, какие цвета проводов находятся на одной и той же обмотке. Если карты нет, возможно, на сайте производителя что-то есть. 2) Используйте мультиметр: переведите его в режим «непрерывность». Выберите один провод, а затем найдите любой другой провод, который показывает непрерывность с ним. Эти два провода находятся на одной обмотке. Путем исключения можно с уверенностью предположить, что два других представляют другую обмотку. 3) Если у вас нет счетчика, вы можете скрутить 2 провода вместе, а затем попробовать раскрутить вал двигателя. Если провода будут на одной обмотке, вал станет заметно тяжелее раскручивать.
Признаки неправильного подключения двигателей
Традиционно попытка переместить неправильно подключенный шаговый двигатель либо ничего не происходит, либо вызывает неприятный жужжащий звук.
Однако последние версии klipper обычно обнаруживают неправильное подключение и просто отключаются. Если во время проверки двигателя машинка для стрижки сразу выключается: проверьте журналы. Если есть проблема с проводкой вашего шагового двигателя, он сообщит что-то вродеTMC 'stepper_y' сообщает DRV_STATUS: 001900d0 s2vsa=1(LowSideShort_A!) ola=1(OpenLoad_A!) olb=1(OpenLoad_B!) CS_ACTUAL=25 Переход в состояние выключения: TMC 'stepper_y' сообщает об ошибке: DRV_STATUS: 001900d0 s2vsa=1(LowSideShort_A!) ola=1(OpenLoad_A!)
Проводка блока питания постоянного тока
Многие принтеры Voron последнего поколения предусматривают использование двух или более независимых источников питания. Это могут быть источники питания 24 В, 5 В и 12 В в зависимости от конфигурации.
Важно! Соедините 0 В постоянного тока (обычно помеченный как V-) на всех ваших источниках питания постоянного тока вместе, чтобы убедиться, что все они имеют одинаковое опорное напряжение.
Если этого не сделать, могут возникнуть трудности с диагностикой проблем (устройства могут не включиться или выйти из строя из-за превышения лимита напряжения).Принтеры меньшего размера (V0, Legacy)
Вместо нескольких источников питания в V0 используется преобразователь постоянного тока для создания шины 5 В вместо выделенного источника питания 5 В.
Принтеры большего размера (V1, Trident, V2, Switchwire)
Конфигурации блока питания см. в соответствующих руководствах по сборке.
Количество проводов/длина
Ниже приведены рекомендации для каждой модели принтера по планированию количества и длины проводов. Как всегда, это рекомендации, и добавление припусков всегда является хорошей идеей.
- Провода портала V1
- Провода портала Trident
- Провода портала V2
Маршрутизация портала
стремление их использовать. Провода, обычно находящиеся в них, не рассчитаны на постоянное изгибание, встречающееся в кабельных цепях, и могут порваться гораздо раньше, чем хотелось бы.
Заделайте все соединения с силиконовой или тефлоновой проволокой перед входом в кабельную цепь.Клеммы проводов
На разных платах контроллера используются клеммы разных типов. Платы RAMPS используют клеммы Dupont, а платы SKR используют клеммы JST-XH. При использовании платы SKR требуется комплект разъемов JST-XH с 2-контактными, 3-контактными и 4-контактными разъемами (см. спецификацию). В отличие от соединителей Dupont, соединители JST-XH имеют ключ и подходят только для одной ориентации, поэтому будьте внимательны при вставке контактов.
При подключении шаговых двигателей сохраните ту же последовательность цветов проводов, что и ваши шаговые двигатели, и используйте эту же последовательность для всех шаговых двигателей в принтере. Если используются двигатели спецификации спецификации от StepperOnline, провода должны быть в порядке цветов, как показано на схемах подключения.
Если купленные степперы не соответствуют порядку цветов в документации, нет необходимости перепаивать только для смены цветов.
Для этих деталей не существует «стандартного» порядка цветов проводов. Если строитель решит повторно изменить тип соединителя или что-то еще, обязательно используйте тот же порядок, что и раньше. Технические характеристики двигателей также поставляются с таблицей данных или картой, чтобы вы могли дважды проверить работу. Можно также использовать мультиметр для поиска пар проводов в двигателе путем измерения непрерывности между проводами. Каждый вывод должен иметь непрерывность с другим выводом в своей паре.Важно: Если позже будет обнаружено, что двигатели вращаются в неправильном направлении, требуется переустановка разъемов , а не . Направление можно изменить позже в конфигурации программного обеспечения.
Проводка индуктивного датчика (V1, Trident, V2, Switchwire)
Индуктивный датчик PL-08N спецификации спецификации (и альтернативный датчик Omron), который используется для сетки кровати, регулировки наклона по оси Z (V1/Legacy) или выравнивания четырех порталов (V2) должен питаться от 12-24 В, а не от типичного 5 В, которое используется для концевых выключателей.
Это очень важно, потому что при питании от 5 В расстояние срабатывания уменьшается настолько, что это может привести к поломке сопла.Если вы не точно следуете спецификации спецификации, убедитесь, что приобретенный индуктивный датчик является нормально закрытой (НЗ) версией, а не нормально разомкнутой (НО). Конфигурация не может быть изменена, так как она создана специально на заводе. Нормально разомкнутый (НО) датчик может вызвать сбои при обрыве провода.
Диод BAT85
Из-за переключения, используемого датчиком, выходное напряжение примерно равно напряжению питания датчика. Если датчик питается от общего напряжения 24 В, он будет посылать 24 В на вход MCU, который никогда не предназначен для получения более 5 В. Диод BAT85 используется для решения этой проблемы. Он ориентирован таким образом, что при высоком уровне сигнала датчика (12-24 В) ток не будет поступать на входной контакт MCU. В результате MCU будет показывать ВЫСОКОЕ напряжение из-за внутреннего подтягивающего резистора.
Если сигнал датчика НИЗКИЙ (0 В), ток будет течь от входного контакта MCU через диод, через датчик и на землю (V-). Это потянет вывод MCU на низкий уровень и сработает соответствующим образом.Важно: Диод BAT85 всегда должен подключаться черной полосой к датчику, а не к MCU.
Ниже представлена принципиальная схема с более подробной информацией.
Проводка торцевых упоров
Торцевые упоры могут быть подключены одним из двух способов: нормально закрытым (НЗ) или нормально открытым (НО). Для нормально закрытых конфигураций концевой выключатель пропускает ток, когда он не срабатывает. Для нормально разомкнутых конфигураций концевой выключатель пропускает ток только при срабатывании.
Хотя в идеальном мире обе эти конфигурации будут работать нормально, нормально закрытые (NC) конфигурации более надежны. В случае обрыва провода или отсоединения клеммы принтер решит, что сработал концевой упор, и остановит движение до того, как инструментальная головка врежется в станину или раму.
Обратите внимание, что вы всегда должны соблюдать процедуру возврата в исходное положение — периодический обрыв провода X или Y все равно может привести к аварии, поскольку сопло упадет туда, где, по его мнению, находится концевой упор Z, и вместо этого ударится о станину (не относится к V0 или Переключатель).Подключить механические концевые выключатели для работы в нормально замкнутом режиме несложно, поскольку выключатели спецификации BOM имеют 3 открытых контакта. С помощью мультиметра проверяйте каждую комбинацию трех контактов до тех пор, пока не будет найдена пара, которая имеет целостность (сопротивление <10 Ом), когда переключатель не срабатывает (нормальное состояние), но не имеет непрерывности (сопротивление> 10 МОм), когда переключатель срабатывает (депрессируется). Обычно два внешних контакта являются размыкающими контактами, но их следует проверить перед установкой.
Проводка концевого упора X/Y (Trident, V2)
Соединитель концевого упора X/Y можно прикрепить с помощью ремня к нижней части соединения.
Просто убедитесь, что кабель достаточно длинный, обязательно установите крышку, чтобы любые отпечатки, которые отлетают, не приклеивались к вашим торцевым упорам.Проводка контроллера (MCU)
Следуйте ссылкам на руководства по настройке проводки, относящиеся к вашему принтеру и выбранному контроллеру. На рынке есть и другие контроллеры, которые могут работать (например, Duet), но они не используются повсеместно, поэтому стандартные конфигурации не разработаны.
Voron 0
- V0.0 — Mini E3 v1.2
- V0.0 — Mini E3 V2.0
- V0.1 — SKR PICO
Voron 1
- V11111111111111111111111111111111111111111111111111111111111111111111111111111100.111111111111111111111111111111111111111111111111111111111111111111111111111111189а
. — SKR 1.4
Trident
- Trident — BigTreeTech Octopus
- Trident — MKS Makerbase Monster8
Voron 2
- V2 — SKR 1. 3
- V2 — SKR 1.4
- V2 — FLYboard FLYF407ZG
- V2 — Fysetc Паук v1.1
- V2 — BigTreetech Octopus
- V2 — MKS MAKERBASE MONSTR8
Voron Switchwire
- SW — MINI E3 v2.0
- SW -Einsy Rambo
Affice Affice
- SW -EINSY RAMBO
- . Switchwire)
При установке дисплея Mini12864 следуйте руководству Mini12864 Klipper.
Использование вентиляторов не на 24 В с MCU с питанием 24 В
Можно использовать SKR (и, возможно, другие контроллеры) для управления вентиляторами, светодиодами и другими устройствами, даже если эти устройства используют другое напряжение. SKR, как и большинство контроллеров, использует контакт (-) для управления включением или выключением устройства.
Для данного устройства, если V+ подключен к внешнему источнику питания (например, 5 В или 12 В), а V- подключен к SKR, вентилятор можно включить или выключить. Как упоминалось выше, будет работать только с , если 0 В постоянного тока всех источников питания связаны вместе.
Примечание. На приведенной ниже схеме показаны только провода постоянного тока. Красный представляет V+, черный представляет V-.
Содержание
Установка и подключение шагового электропривода MSST5/10-S
1. Подключение источника питания
MSST5-S работает с напряжением питания постоянного тока от 24 до 48 В постоянного тока. MSST10-S работает с напряжением питания постоянного тока от 24 до 80 В постоянного тока.
С помощью прилагаемого разъема и AWG 16 или
18 провод, подключаем к блоку питания как на схеме ниже.Предохранитель
Внутренний предохранитель : MSST5-S и MSST10-S содержат внутренние быстродействующие предохранители на 10 А
Внешний
предохранитель (опционально) : при желании рекомендуем:Быть
осторожно, чтобы не перепутать провода. Обратное подключение может разрушить диск
и аннулировать гарантию. Регенерация
Когда шаговый двигатель замедляется, он преобразует
кинетическую энергию нагрузки в электрическую, как в генераторе.
Часть этой мощности потребляется двигателем, а часть — приводом. В
приложения, включающие большие нагрузки, работающие на высоких скоростях, значительную энергию
передается на блок питания. Как правило, простые линейные источники питания
иметь большие конденсаторы, способные поглощать эту энергию без повреждений.
Импульсные источники питания обычно отключаются из-за перенапряжения.
Затем избыточная энергия передается обратно на привод и может повредить его. К
Во избежание этого рекомендуется использовать зажим для регенерации RC-50, как показано на рисунке.
ниже.2. Подключение двигателя
Никогда
подключить двигатель к приводу или отсоединить его от привода. Изолируйте неиспользуемый двигатель
провода отдельно, а затем закрепите. Никогда не подключайте провода двигателя к земле или к
источник питания. Есть несколько вариантов подключения
двигатель к приводу.Четыре
ведущие двигатели могут быть подключены только одним способом, как в
рисунок ниже:Шесть ведущих двигателей могут быть соединены последовательно или
центральный кран. При последовательном соединении двигатели развивают больший крутящий момент при низких
скорости, но не может работать так же быстро, как в конфигурации с центральным краном. При серийной работе,
двигатель должен работать на 30% меньше номинального тока, чтобы предотвратить
перегрев. Схемы подключения для обоих способов подключения показаны ниже.Примечание: НЗ = не подключен
Восемь
ведущие двигатели также могут быть соединены двумя способами: последовательно и параллельно. как с шестью
ведущие двигатели, последовательный режим обеспечит больший крутящий момент на низких скоростях и меньший крутящий момент
на высоких скоростях. При последовательном соединении двигатель должен работать на 30%
меньше номинального тока для предотвращения перегрева. Схемы подключения для
восемь ведущих двигателей показаны ниже.3. Подключение к ПК через RS-232
Найти
ваш компьютер в пределах 6 футов от шагового драйвера.Ваш
Драйвер поставлялся с черной вилкой адаптера. У него есть телефонная розетка на
на одном конце и большой 9-контактный разъем на другом. Вставьте широкий конец в
Последовательный порт COM1 вашего ПК.Безопасность
адаптер с винтами по бокам. Если порт COM1 на вашем компьютере
уже используется чем-то другим, вы можете использовать порт COM2 для степпинга
Водитель. На некоторых ПК COM2 будет иметь 25-контактный разъем, который не подходит для
черный переходник. Если это так, и вы должны использовать COM2, вам, возможно, придется
купите 25 к 9контактный последовательный адаптер в местном компьютерном магазине.Другой
выбор, отличный от последовательного порта COM, который вы можете выбрать, это использование USB-порта на вашем
компьютер через порт USB на адаптер RS232, доступный на рынке.4. Подключение входов и выходов
входы и выходы подключаются с помощью съемных разъемов с винтовыми клеммами.
Три входа(ШАГ,
DIR, EN) находятся на шестиконтактном разъеме. Аналоговый вход и цифровой
выход находится на пятипозиционном разъеме вместе с 5VDC и заземлением для
аналоговые соединения.4.1 Подключение цифровых входов
4.2 Цифровые входы STEP&DIR
S
приводы включают два высокоскоростных входа, называемых STEP и DIR. Они принимают 5 вольт
несимметричные или дифференциальные сигналы, до 2 МГц. EN от 5 до 12 вольт
стандартный цифровой вход, который можно использовать для включения двигателя, сброса аварийного сигнала или
изменение скорости осциллятора.Все
входы настраиваются с помощью программного обеспечения ST Configurator.ШАГ и
Входы DIR могут подключаться к индексатору, главному энкодеру или штурвалу ЧПУ для
следующих приложений, или их можно использовать для подключения датчиков, переключателей
и другие электронные устройства. Их можно использовать как бег/стоп и направление
входы для режима скорости (осциллятор).4.3 Высокоскоростной ввод
ПЛК делают
обычно не используют 5-вольтовую логику. Уровни сигнала могут достигать 24 вольт.
подключается к входам STEP и DIR, если добавлены внешние гасящие резисторы
как показано ниже:▪Для логики 12 В добавьте резисторы 820 Ом, 1/4 Вт
▪Для логики 24 В используйте резисторы 2200 Ом, 1/4 Вт
ВНИМАНИЕ:
Максимальное напряжение, которое может быть подано непосредственно на высокоскоростную входную клемму
составляет 5 вольт. Никогда не подавайте переменный ток высокого напряжения на входную клемму.4.4 EN Цифровой вход
Как
Как уже упоминалось выше, входы STEP и DIR настроены на 5-вольтовую логику.
Вход EN предназначен для работы от 5 до 12 вольт. Добавьте 1500 Ом к En
для работы от 24 вольт.4.5 Аналоговые входы
MSST5-S и MSST10-S имеют один аналоговый вход от 0 до 5 В, который может использоваться приводом для управления скоростью двигателя в скоростном режиме.
Этот вход также можно использовать для считывания напряжения с помощью команд SCL «IA».ПРЕДУПРЕЖДЕНИЕ – Аналоговый вход
следует использовать с осторожностью. Он не является оптически изолированным и может работать неправильно.
или может быть поврежден, если заземление системы несовместимо.4.6 Подключение цифрового выхода
Приводы MSST5-S и MSST10-S имеют один цифровой
выход, который можно использовать одним из пяти способов:Тормоз : Управление электрическим
тормозное реле, автоматически отпускающее и включающееся по требованию приводаДвижение : указывает, когда
двигатель движетсяОшибка : замыкается при включении привода
возникает неисправность или аварийное состояние, красный и зеленый светодиоды будут мигать при ошибке
кодTach : производит импульсы
пропорциональна пройденному расстоянию (и, следовательно, частоте,
пропорционально скорости двигателя).
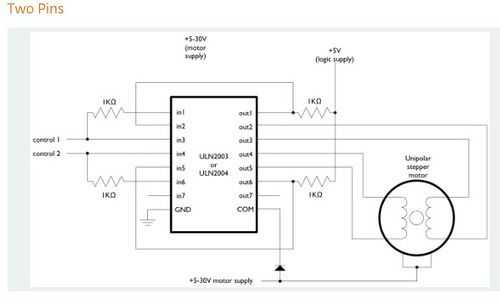
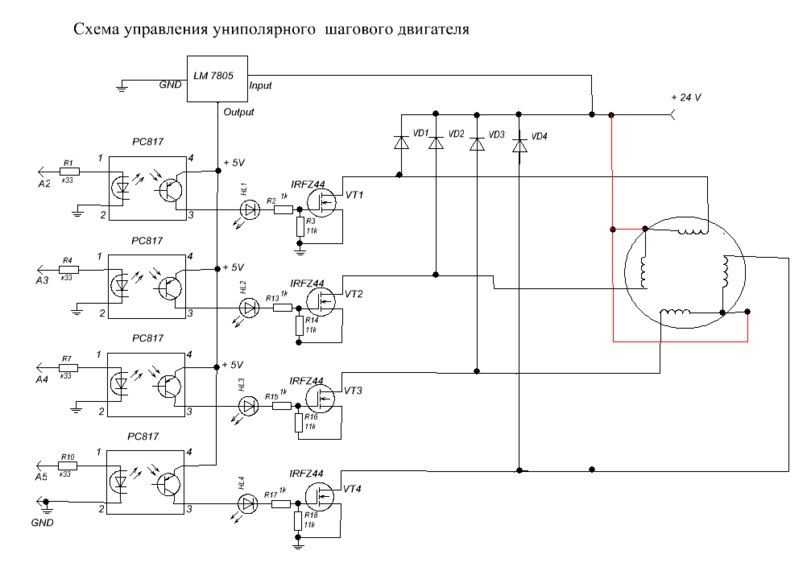 3ohm
3ohm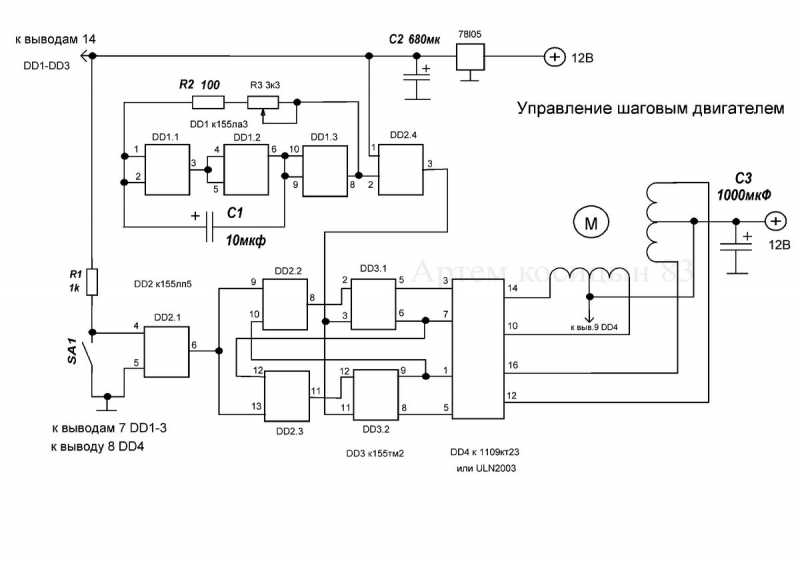 (нагрузка 450 г)
(нагрузка 450 г) Такое расположение обмоток создает вращающееся магнитное поле для ротора.
Такое расположение обмоток создает вращающееся магнитное поле для ротора.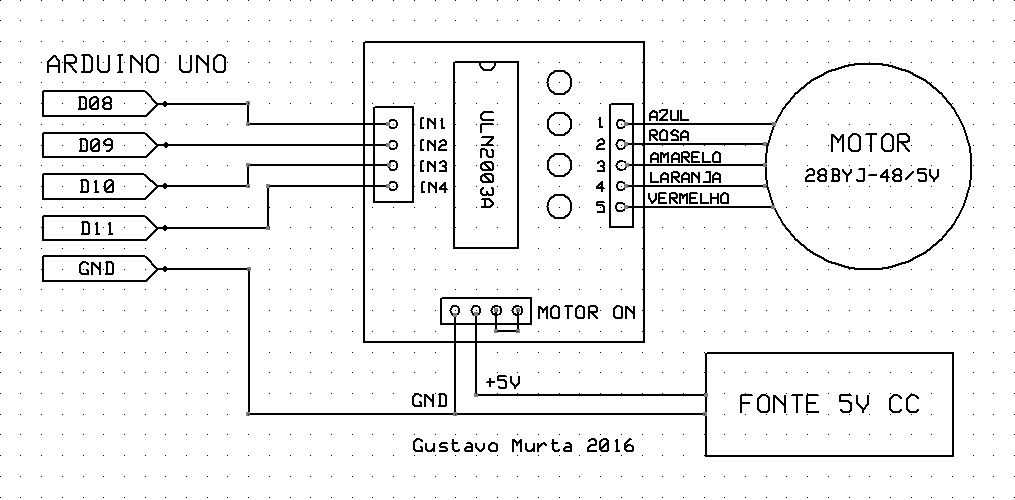 Но если мы соединим оба центральных ответвления вместе, чтобы создать общий провод для всех четырех фаз, управление станет проще. Таким образом, двигатель становится 5-проводным шаговым двигателем, расположение обмоток которого показано на рисунке ниже.
Но если мы соединим оба центральных ответвления вместе, чтобы создать общий провод для всех четырех фаз, управление станет проще. Таким образом, двигатель становится 5-проводным шаговым двигателем, расположение обмоток которого показано на рисунке ниже. Управление биполярным двигателем становится затруднительным, поскольку для изменения направления тока в обмотке требуется Н-мост. (Подробнее)
Управление биполярным двигателем становится затруднительным, поскольку для изменения направления тока в обмотке требуется Н-мост. (Подробнее)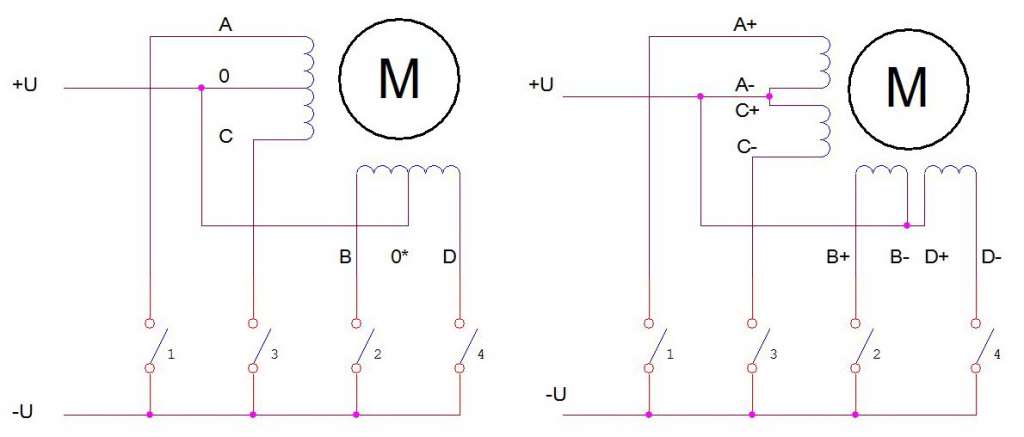 В зависимости от производителя и типа модели цвет проводов может быть разным.
В зависимости от производителя и типа модели цвет проводов может быть разным.  Хотя можно увеличить скорость небольшого шагового двигателя с помощью более мощного контроллера, это сократит срок службы двигателя.
Хотя можно увеличить скорость небольшого шагового двигателя с помощью более мощного контроллера, это сократит срок службы двигателя.  Благодаря более высокому крутящему моменту эти двигатели используются в 3D-принтерах, станках с ЧПУ, робототехнике и других промышленных приложениях.
Благодаря более высокому крутящему моменту эти двигатели используются в 3D-принтерах, станках с ЧПУ, робототехнике и других промышленных приложениях. 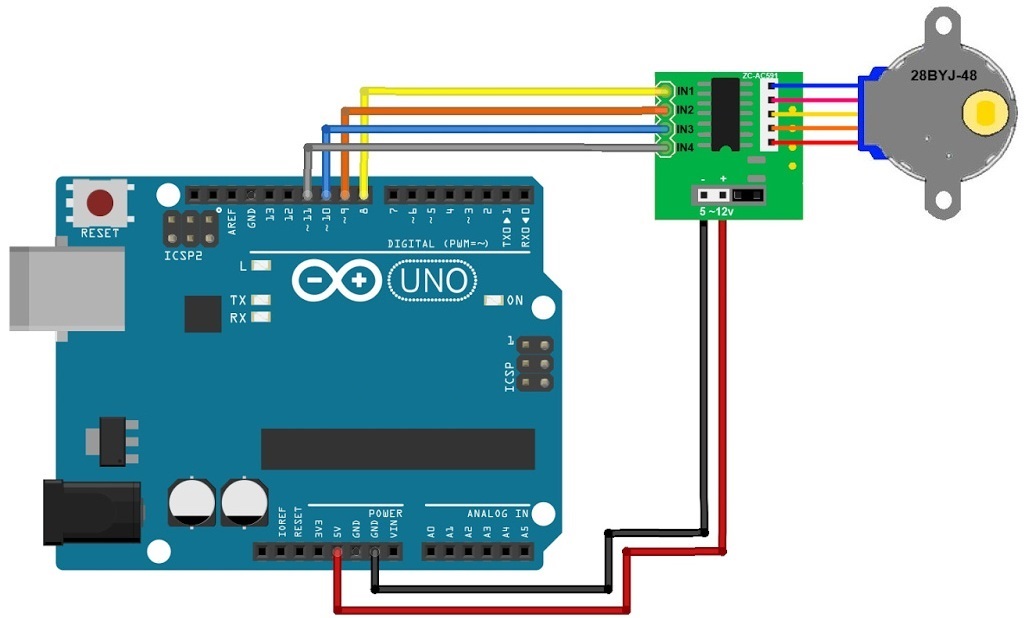
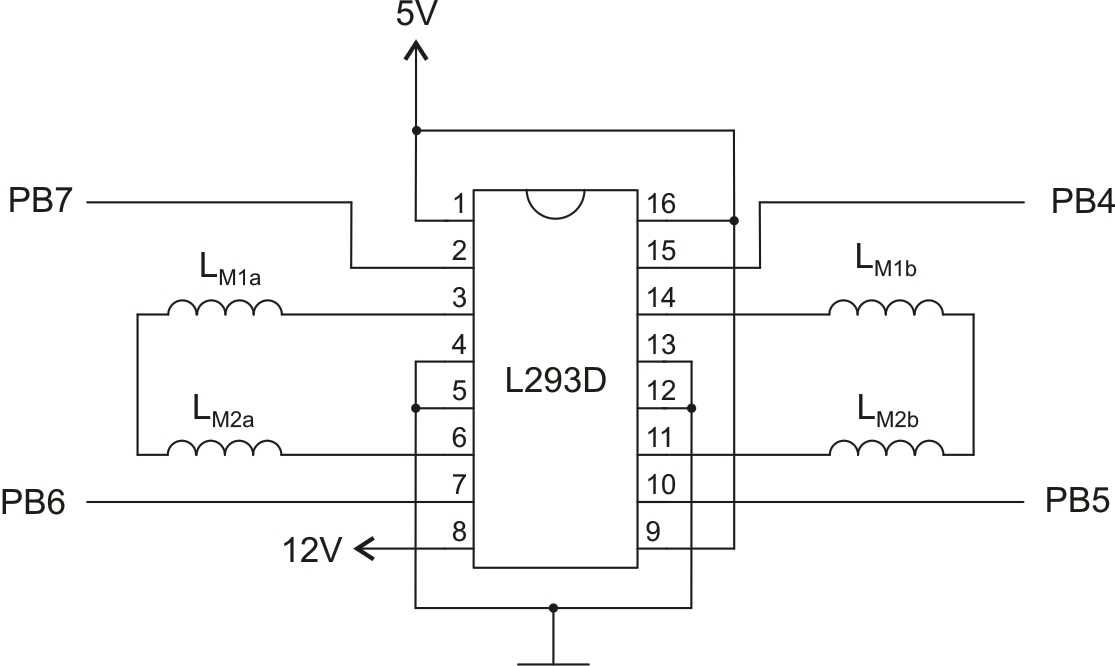 Им требуется постоянная обратная связь для управления положением печатающей головки. Таким образом, требуется сложное аппаратное обеспечение, и управление становится затруднительным.
Им требуется постоянная обратная связь для управления положением печатающей головки. Таким образом, требуется сложное аппаратное обеспечение, и управление становится затруднительным.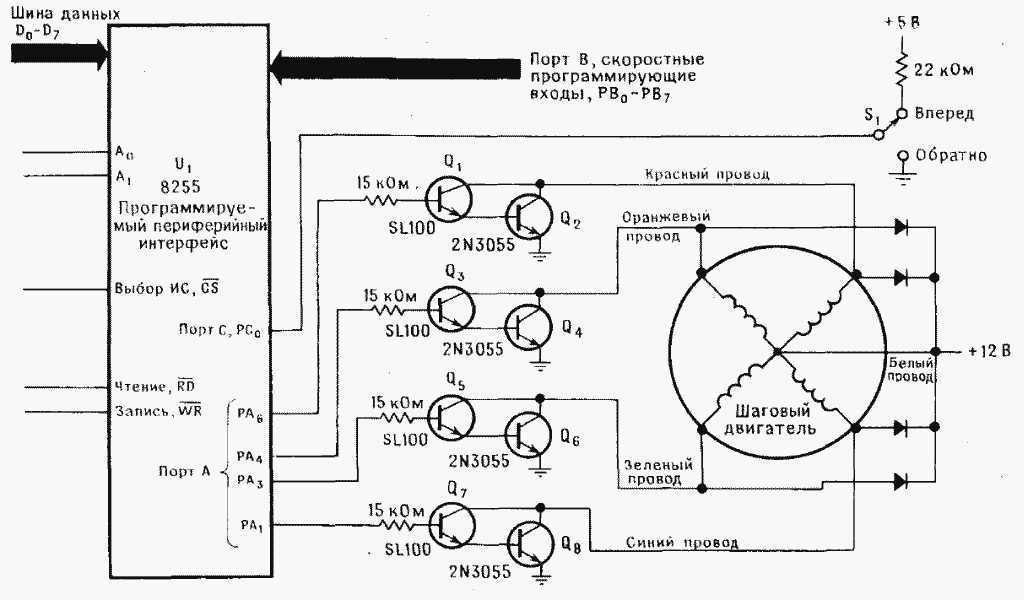
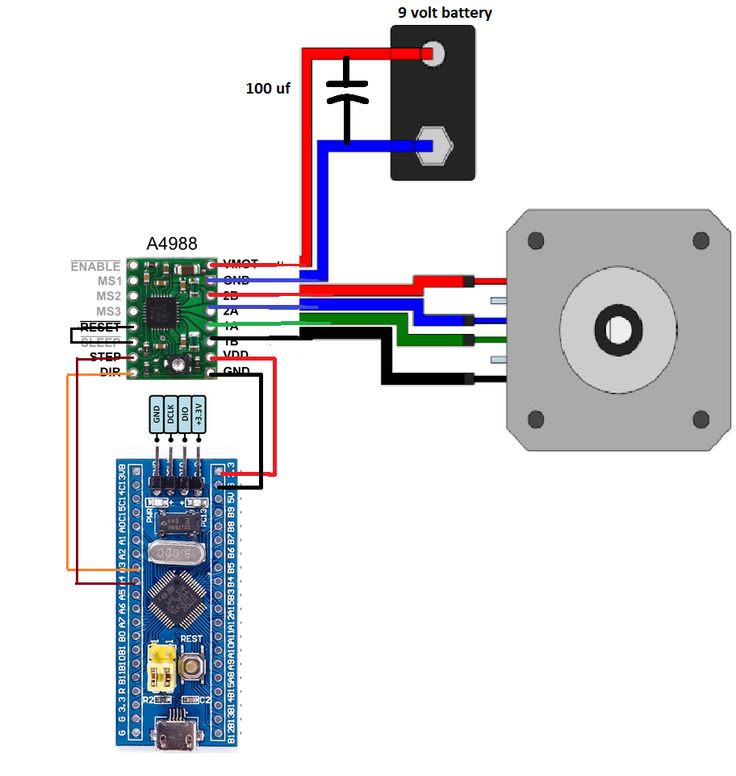 Термистор может использовать 2-контактный разъем Microfit.
Термистор может использовать 2-контактный разъем Microfit. Для принтеров с кабелем пуповины (V0 Toolhead, Legacy) они могут оказаться излишними. Можно использовать кабель автоматизации, такой как IGUS, но необходимо проверить минимальный радиус изгиба кабеля, поскольку типичный радиус изгиба для кабельных цепей Voron очень мал.
Для принтеров с кабелем пуповины (V0 Toolhead, Legacy) они могут оказаться излишними. Можно использовать кабель автоматизации, такой как IGUS, но необходимо проверить минимальный радиус изгиба кабеля, поскольку типичный радиус изгиба для кабельных цепей Voron очень мал. Кабели можно спрятать в направляющих. Опционально распечатайте крышки кабелей для рельсов.
Кабели можно спрятать в направляющих. Опционально распечатайте крышки кабелей для рельсов.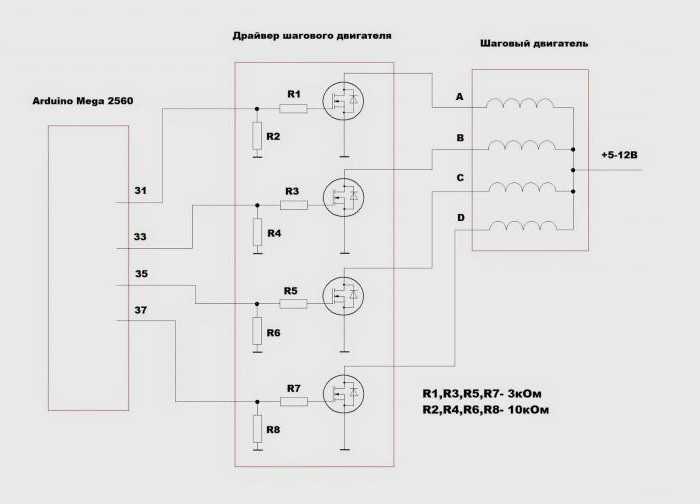
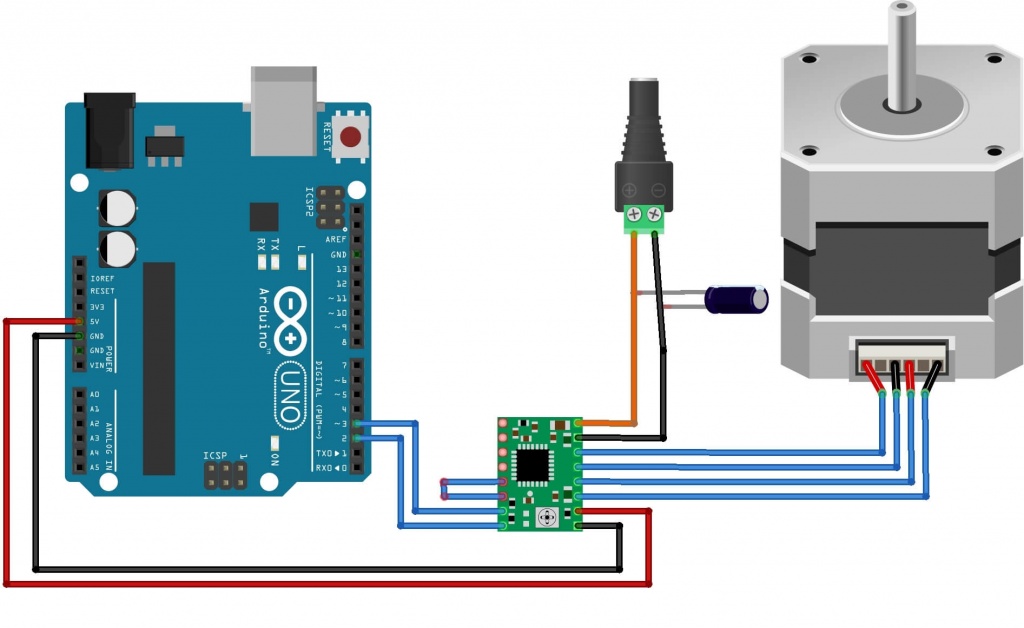 Однако последние версии klipper обычно обнаруживают неправильное подключение и просто отключаются. Если во время проверки двигателя машинка для стрижки сразу выключается: проверьте журналы. Если есть проблема с проводкой вашего шагового двигателя, он сообщит что-то вроде
Однако последние версии klipper обычно обнаруживают неправильное подключение и просто отключаются. Если во время проверки двигателя машинка для стрижки сразу выключается: проверьте журналы. Если есть проблема с проводкой вашего шагового двигателя, он сообщит что-то вроде Если этого не сделать, могут возникнуть трудности с диагностикой проблем (устройства могут не включиться или выйти из строя из-за превышения лимита напряжения).
Если этого не сделать, могут возникнуть трудности с диагностикой проблем (устройства могут не включиться или выйти из строя из-за превышения лимита напряжения).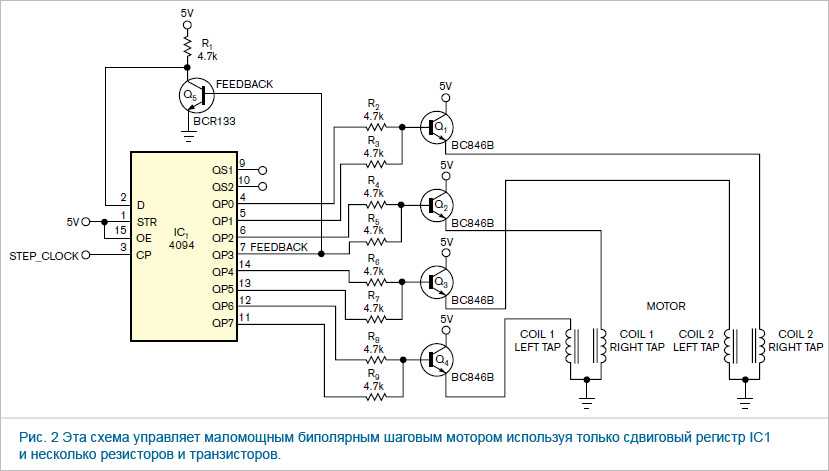 Заделайте все соединения с силиконовой или тефлоновой проволокой перед входом в кабельную цепь.
Заделайте все соединения с силиконовой или тефлоновой проволокой перед входом в кабельную цепь.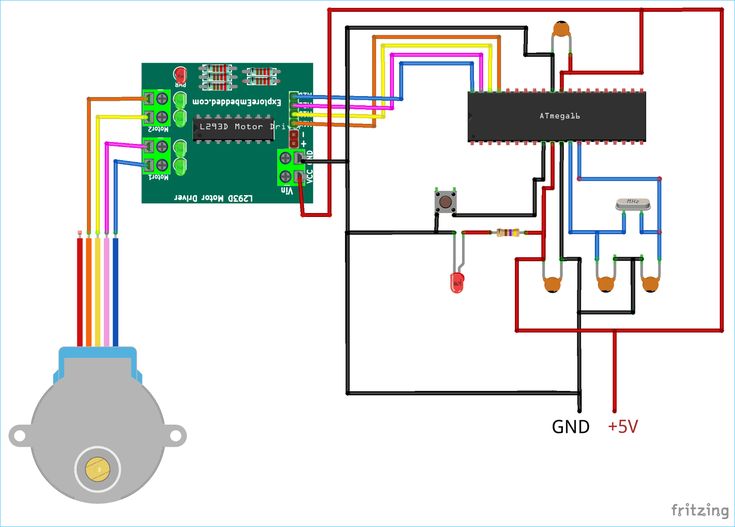 Для этих деталей не существует «стандартного» порядка цветов проводов. Если строитель решит повторно изменить тип соединителя или что-то еще, обязательно используйте тот же порядок, что и раньше. Технические характеристики двигателей также поставляются с таблицей данных или картой, чтобы вы могли дважды проверить работу. Можно также использовать мультиметр для поиска пар проводов в двигателе путем измерения непрерывности между проводами. Каждый вывод должен иметь непрерывность с другим выводом в своей паре.
Для этих деталей не существует «стандартного» порядка цветов проводов. Если строитель решит повторно изменить тип соединителя или что-то еще, обязательно используйте тот же порядок, что и раньше. Технические характеристики двигателей также поставляются с таблицей данных или картой, чтобы вы могли дважды проверить работу. Можно также использовать мультиметр для поиска пар проводов в двигателе путем измерения непрерывности между проводами. Каждый вывод должен иметь непрерывность с другим выводом в своей паре. Это очень важно, потому что при питании от 5 В расстояние срабатывания уменьшается настолько, что это может привести к поломке сопла.
Это очень важно, потому что при питании от 5 В расстояние срабатывания уменьшается настолько, что это может привести к поломке сопла.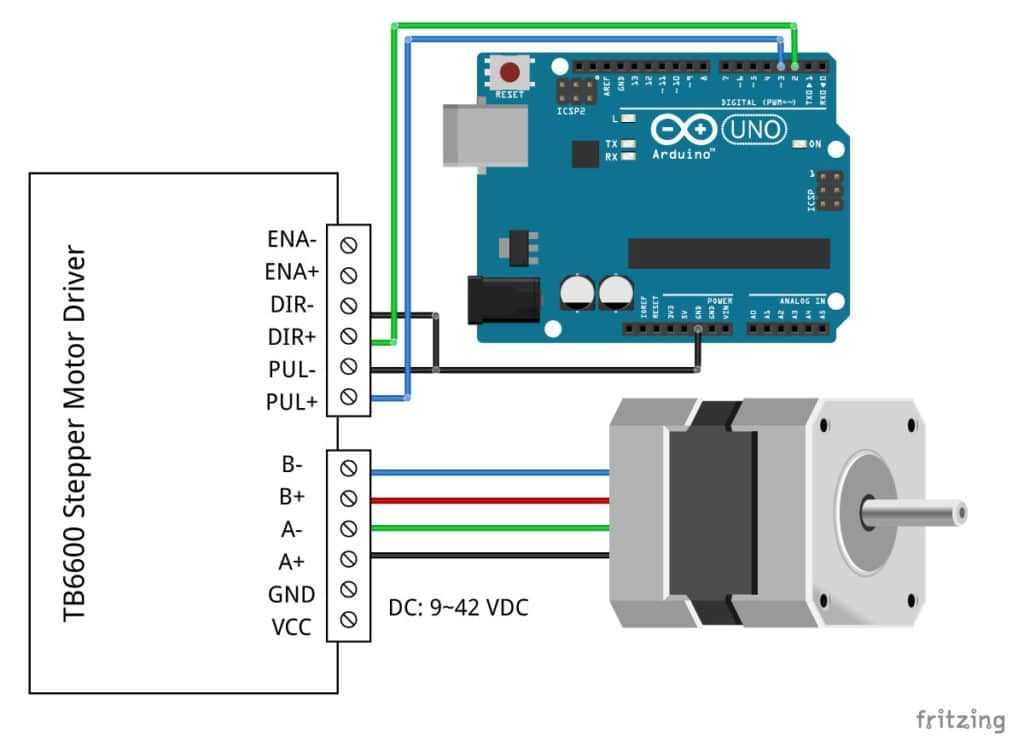 Если сигнал датчика НИЗКИЙ (0 В), ток будет течь от входного контакта MCU через диод, через датчик и на землю (V-). Это потянет вывод MCU на низкий уровень и сработает соответствующим образом.
Если сигнал датчика НИЗКИЙ (0 В), ток будет течь от входного контакта MCU через диод, через датчик и на землю (V-). Это потянет вывод MCU на низкий уровень и сработает соответствующим образом.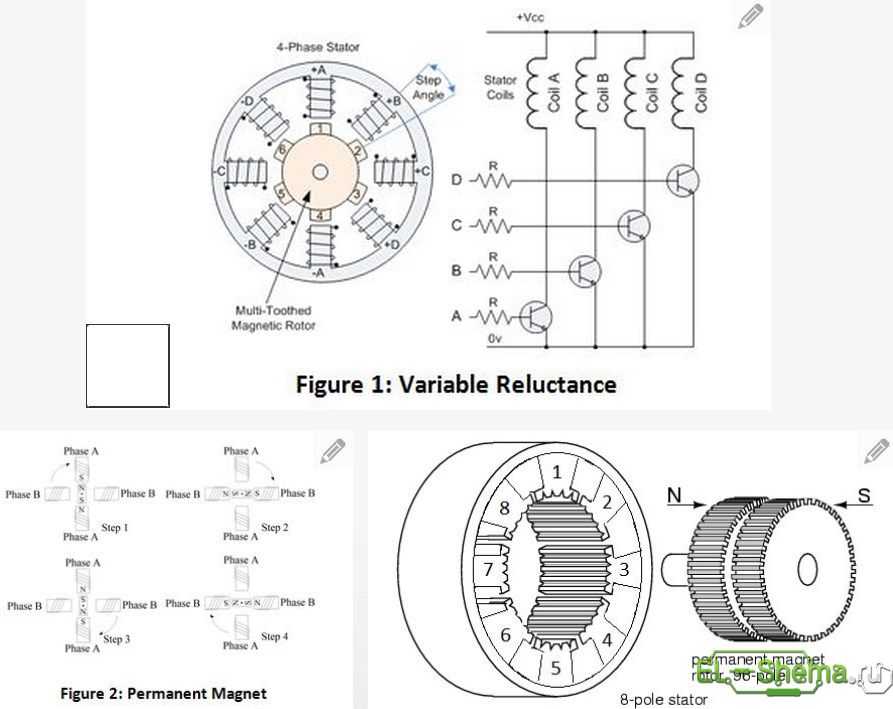 Обратите внимание, что вы всегда должны соблюдать процедуру возврата в исходное положение — периодический обрыв провода X или Y все равно может привести к аварии, поскольку сопло упадет туда, где, по его мнению, находится концевой упор Z, и вместо этого ударится о станину (не относится к V0 или Переключатель).
Обратите внимание, что вы всегда должны соблюдать процедуру возврата в исходное положение — периодический обрыв провода X или Y все равно может привести к аварии, поскольку сопло упадет туда, где, по его мнению, находится концевой упор Z, и вместо этого ударится о станину (не относится к V0 или Переключатель). Просто убедитесь, что кабель достаточно длинный, обязательно установите крышку, чтобы любые отпечатки, которые отлетают, не приклеивались к вашим торцевым упорам.
Просто убедитесь, что кабель достаточно длинный, обязательно установите крышку, чтобы любые отпечатки, которые отлетают, не приклеивались к вашим торцевым упорам. 3
3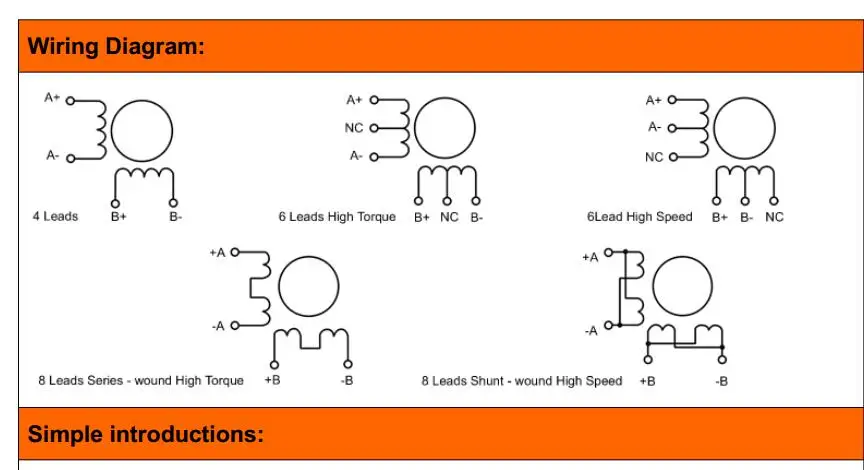

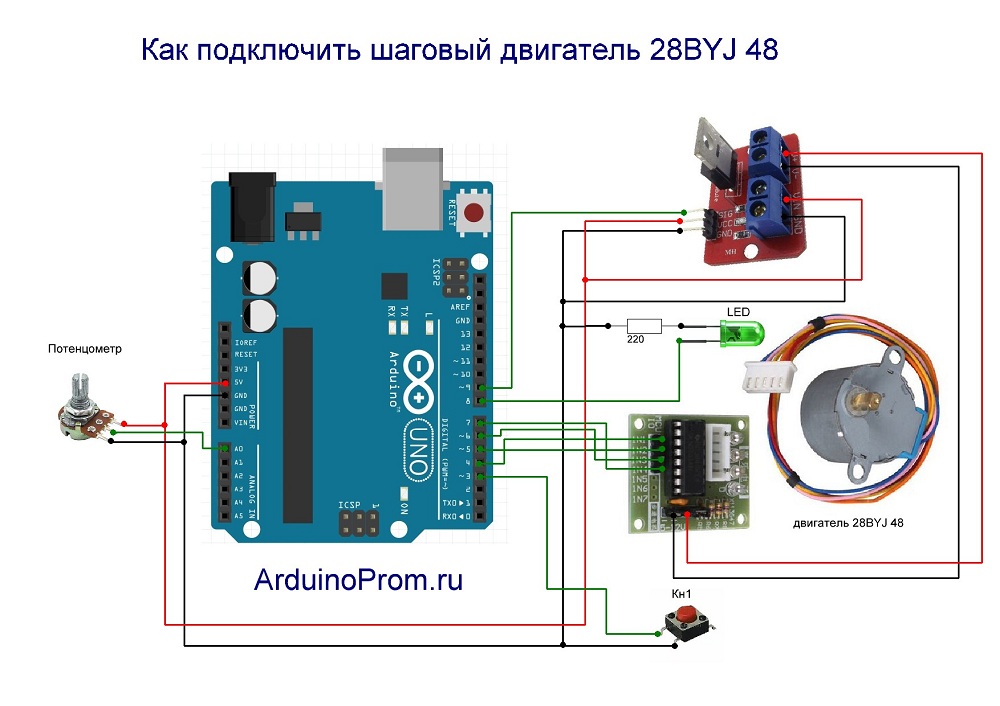
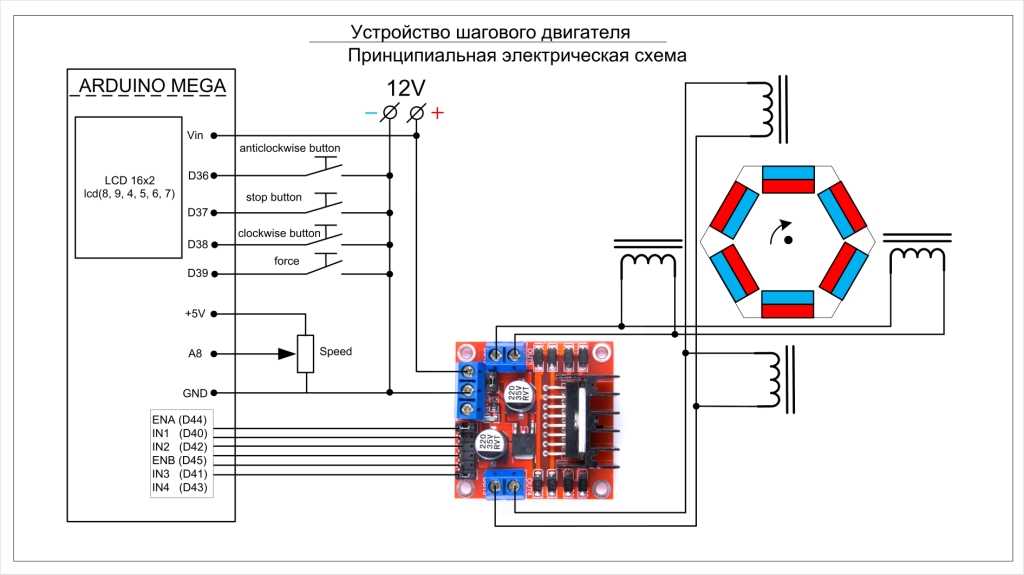 Схемы подключения для
Схемы подключения для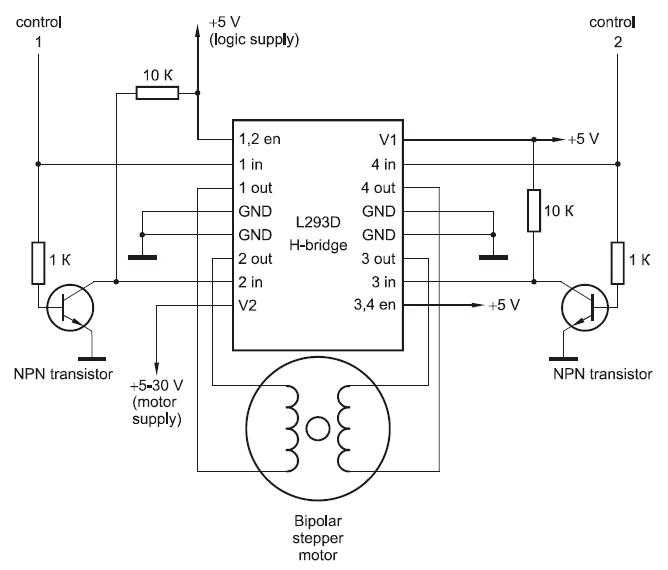
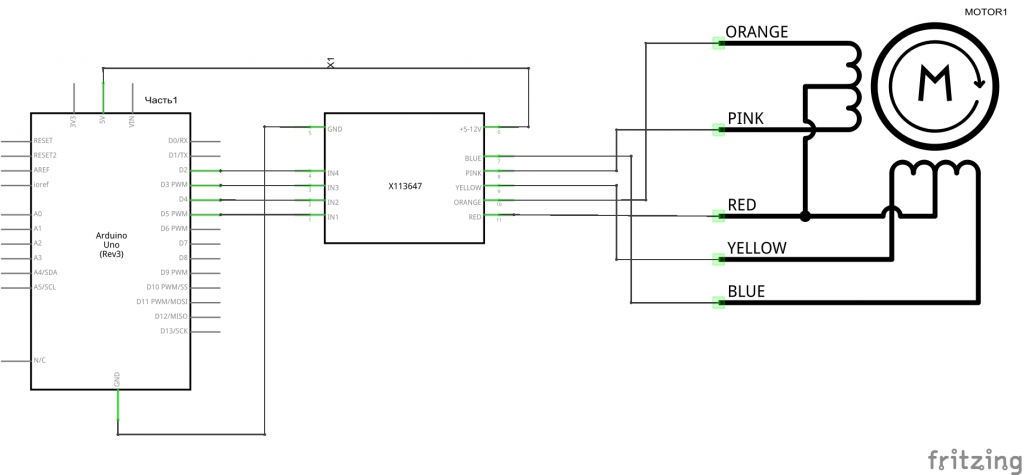 Их можно использовать как бег/стоп и направление
Их можно использовать как бег/стоп и направление Этот вход также можно использовать для считывания напряжения с помощью команд SCL «IA».
Этот вход также можно использовать для считывания напряжения с помощью команд SCL «IA».