Содержание
Как подключить шаговый двигатель с 4, 6, 8 выводами
Новости
Поздравляем с Днем России!
Уважаемые покупатели, сердечно поздравляем вас с праздником — Днем России! Обращаем ваше внимание, что 13 июня у нас выходной день.
Информация о текущих ценах
Уважаемые покупатели!
В связи с экономической и политической нестабильностью в мире высокий уровень цен по-прежнему сохраняется.
Мы делаем все от нас зависящее, чтобы поддерживать весь необходимый ассортимент и сохранять цены на минимально возможном уровне.
Можем заверить, что снижение цен будет произведено сразу, как только начнется товародвижение на глобальных маршрутах.
График работы на Майские праздники
Уважаемые покупатели, поздравляем всех с майскими праздниками! Обращаем внимание, что 30 апреля, 1,2,3 и 7,8,9,10 мая — выходные дни, 4,5,6 мая и с 11 мая — работаем в обычном режиме. Читать все новости
Читать все новости
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Также, как и шаговый двигатель с четырехконтактным соединением, униполярный двигатель с 6 проводами имеет пару проводов для каждой обмотки. Однако, он также имеет центральный вывод для каждой обмотки, что дает возможность подключать его как в качестве биполярного шагового двигателя, так и в качестве однополярного.
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами.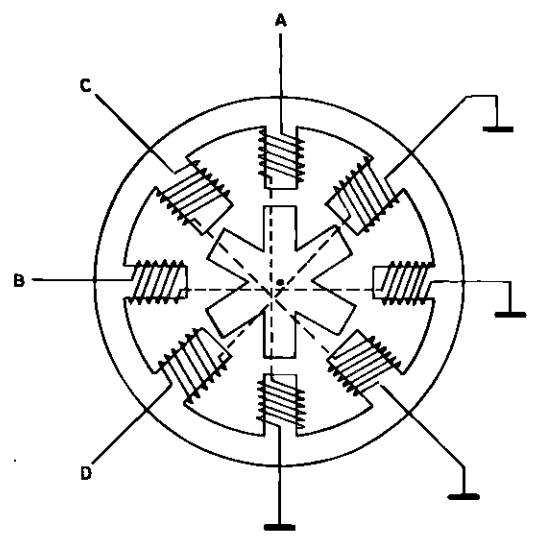 Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
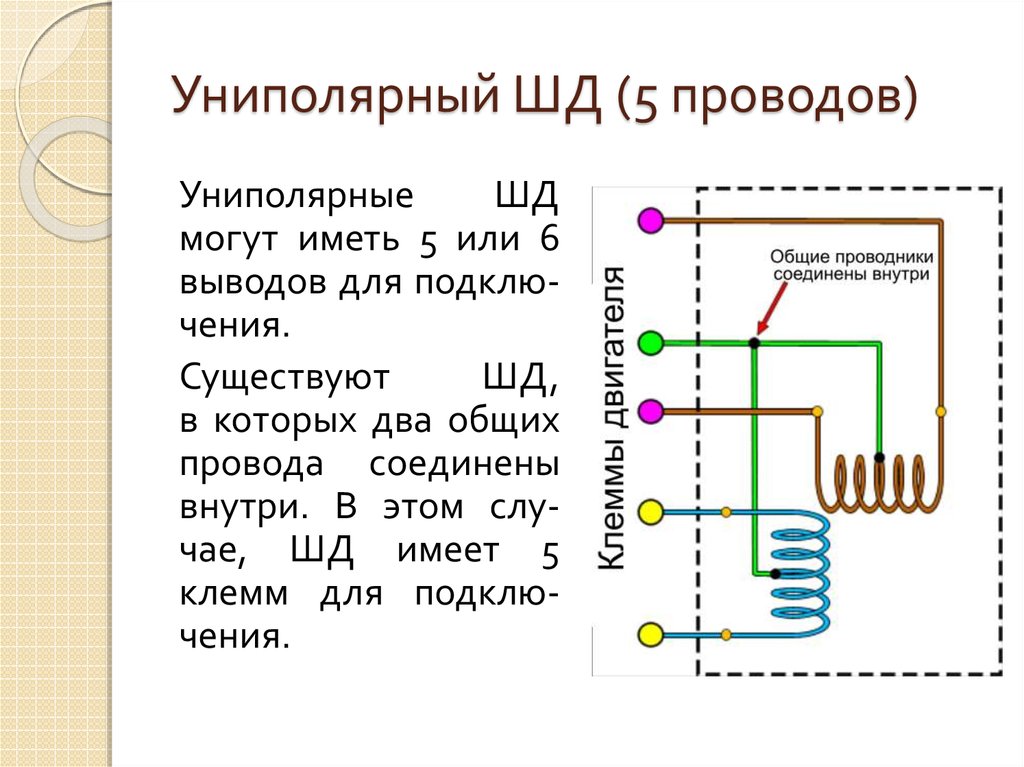
Схема подключения шагового электродвигателя с 5-ю выводами очень похожа на схему подключения с 6-ю контактами. Главное ее отличие состоит в том, что центральные выводы замкнуты между собой внутри, соединяясь в один провод. Это обеспечивает работу электродвигателя только по однополярной схеме.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 8 ВЫВОДАМИ
Наконец, существуют шаговые электродвигатели, подключаемые при помощи 8-ми проводов. Для того, чтобы понять, как подключить шаговый двигатель с 8 выводами, мы должны вернуться к инструкциям выше.Их схема подключения во многом схожа со схемой, предполагающей использование 6-ти проводов. Разница между ними состоит в том, что две фазы разделены на две отдельных обмотки. Имея указанную схему, вы сможете подключить шаговый двигатель по однополярной схеме, а также иметь три различные комбинации для биполярного подключения.
Для того, чтобы понять, как подключить шаговый двигатель с 8 выводами, мы должны вернуться к инструкциям выше.Их схема подключения во многом схожа со схемой, предполагающей использование 6-ти проводов. Разница между ними состоит в том, что две фазы разделены на две отдельных обмотки. Имея указанную схему, вы сможете подключить шаговый двигатель по однополярной схеме, а также иметь три различные комбинации для биполярного подключения.
- Последовательно соединив обмотки(увеличится индуктивное и активное сопротивление, а также момент, упадет максимальная скорость)
- Параллельно (из-за меньшей индуктивности будет меньше момент и выше скорость)
- Соединив обмотки параллельно, можно использовать униполярное подключение, как для 6-выводного шагового мотора
Ссылки:
Как настроить ЧПУ станок
Униполярный и биполярный шаговый двигатель
DARXTON
Новости
Поздравляем с Днем России!
Уважаемые покупатели, сердечно поздравляем вас с праздником — Днем России! Обращаем ваше внимание, что 13 июня у нас выходной день.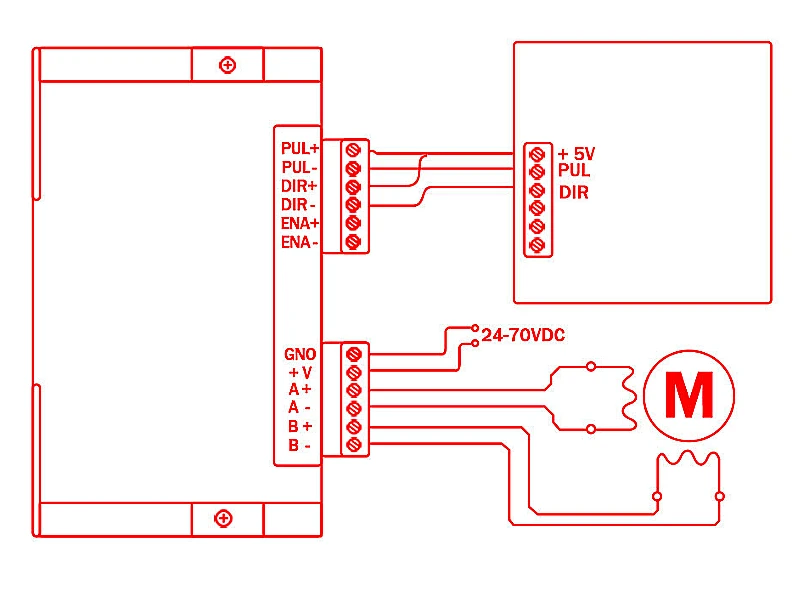
Информация о текущих ценах
Уважаемые покупатели!
В связи с экономической и политической нестабильностью в мире высокий уровень цен по-прежнему сохраняется.
Мы делаем все от нас зависящее, чтобы поддерживать весь необходимый ассортимент и сохранять цены на минимально возможном уровне.
Можем заверить, что снижение цен будет произведено сразу, как только начнется товародвижение на глобальных маршрутах. Читать все новости
Как подключить шаговый двигатель 6 проводной
Содержание
- Как подключить шаговый двигатель
- КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
- КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
- КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
- Как работает шаговый электродвигатель?
- Что такое шаговый двигатель?
- Преимущества и недостатки шагового электродвигателя
- Устройство и принцип работы
- Типы шаговых двигателей
- По конструкции ротора
- Реактивный
- С постоянными магнитами
- Гибридные
- По виду обмоток
- Униполярный
- Биполярный
- Подключение шагового двигателя
- Типичные схемы подключения ШД
- Управление шаговым двигателем
- Без контроллера
- С контроллером
- Популярные схемы управления ШД
- Простейший драйвер шагового двигателя своими руками
- Полезное видео
- Шаговые двигатели (подробный разбор 4 типов)
- Общие сведения:
- Виды шаговых двигателей по типу ротора:
- Какой тип шагового двигателя у меня?
- Виды шаговых двигателей по типу соединения электромагнитов статора:
- Какой тип шагового двигателя у меня?
- Режимы работы шаговых двигателей:
- Пример работы шаговых двигателей с разными видами роторов:
- Подключение шаговых двигателей к Arduino:
- Подключение шагового двигателя Комментировать
- Подключение шагового двигателя
- Видео
Как подключить шаговый двигатель
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.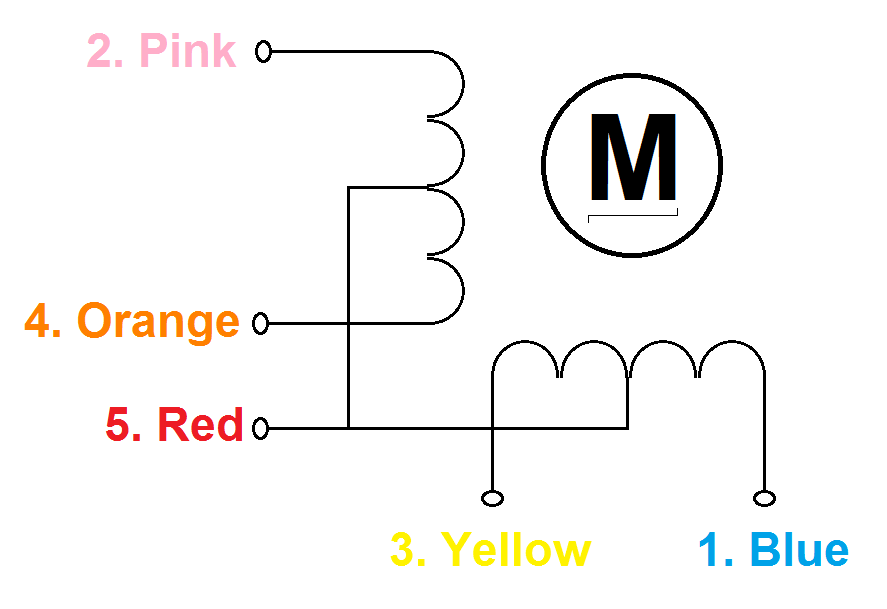
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю.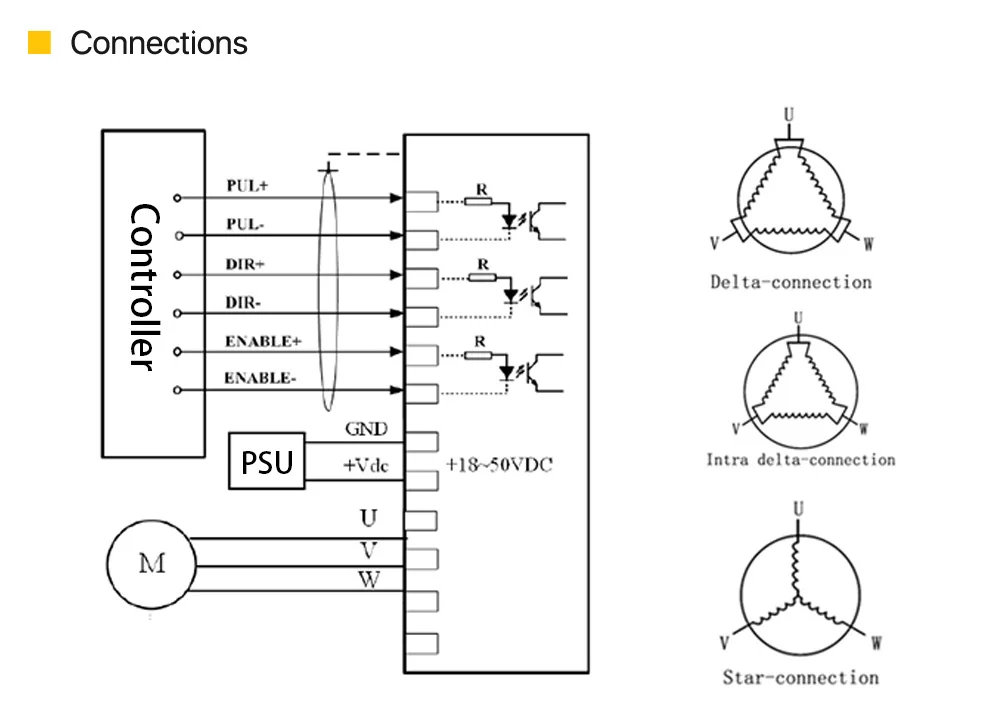 Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
Источник
Как работает шаговый электродвигатель?
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
К недостаткам применения шагового двигателя относятся:
Устройство и принцип работы
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
Расположение пазов гибридника
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
Рис. 6. Принцип работы гибридного ШД
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата.
При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
 При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
Волновое управление
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока.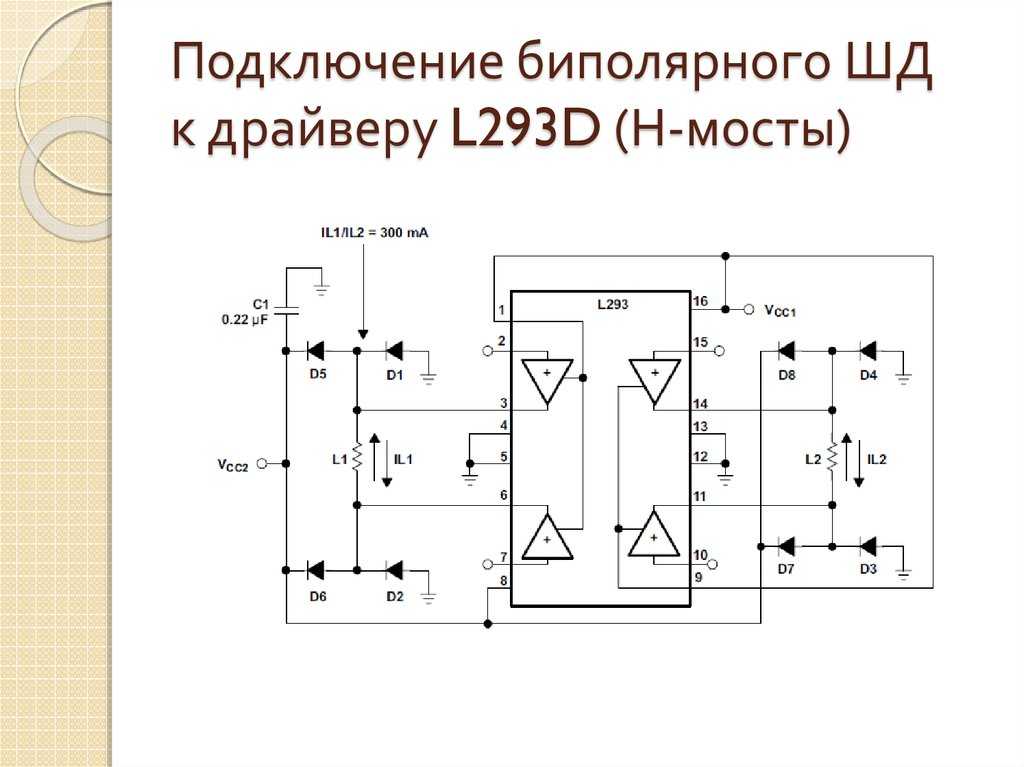 Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Полезное видео
 youtube.com/embed/hgZVSwNmuSo?feature=oembed»>
youtube.com/embed/hgZVSwNmuSo?feature=oembed»>
Источник
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
Источник
Подключение шагового двигателя Комментировать
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Подключение шагового двигателя
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами. Каждая из двух фазных обмоток такого электродвигателя имеет пару проводов с непрерывной связью. Драйвер ШД в данном случае подключается пошагово.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам. Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов. Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу. Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов. Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.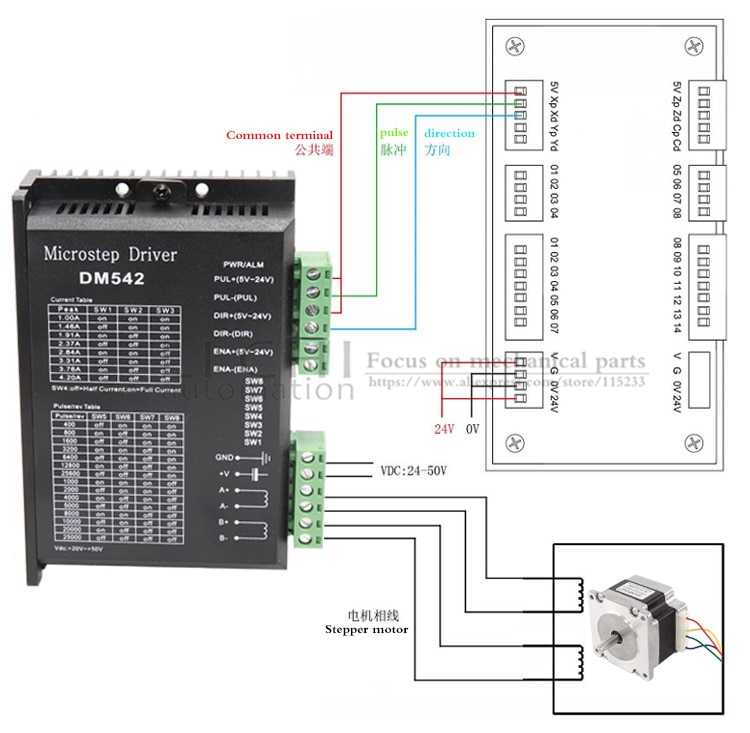
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
ВНИМАНИЕ – всегда проверяйте цветовую схему выводов, шаговый двигатель от конкретного производителя отличается от абсолютно аналогичного ШД другого производителя, а значит, может иметь другую цветовую схему выводов!
По вопросу подключения шагового двигателя, вы всегда можете обратиться к нашим специалистам по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.
Источник
Видео
Подключаем униполярные шаговые двигатели
Шаговые Двигатели Подключение и Запуск
Униполярные шаговые двигатели и их переделка в биполярные. Большой обзор, переделка и подключение.
Как соединить обмотки шагового двигателя (параллельное подключение) — Stepper motor winding
Управление шаговым двигателем. Драйвер A4988, подключение и настройка
Шаговый двигатель, как подключить без сложностей!!!!
🔨 КАК ЗАПУСТИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ 💡 Без Драйвера!
Переделка шагового двигателя в обычный биполярный
Как запустить шаговый двигатель . Controlling a stepper motor through a signal generator
Подключение шагового двигателя
Схема подключения шагового двигателя 4 провода
Содержание
- Типы шаговых двигателей
- Униполярные и биполярные шаговые двигатели
- Подключение шаговых двигателей
- Способы управления шаговыми двигателями
- Схема подключения шаговых двигателей
- Общие сведения:
- Виды шаговых двигателей по типу ротора:
- Какой тип шагового двигателя у меня?
- Виды шаговых двигателей по типу соединения электромагнитов статора:
- Какой тип шагового двигателя у меня?
- Режимы работы шаговых двигателей:
- Пример работы шаговых двигателей с разными видами роторов:
- Подключение шаговых двигателей к Arduino:
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.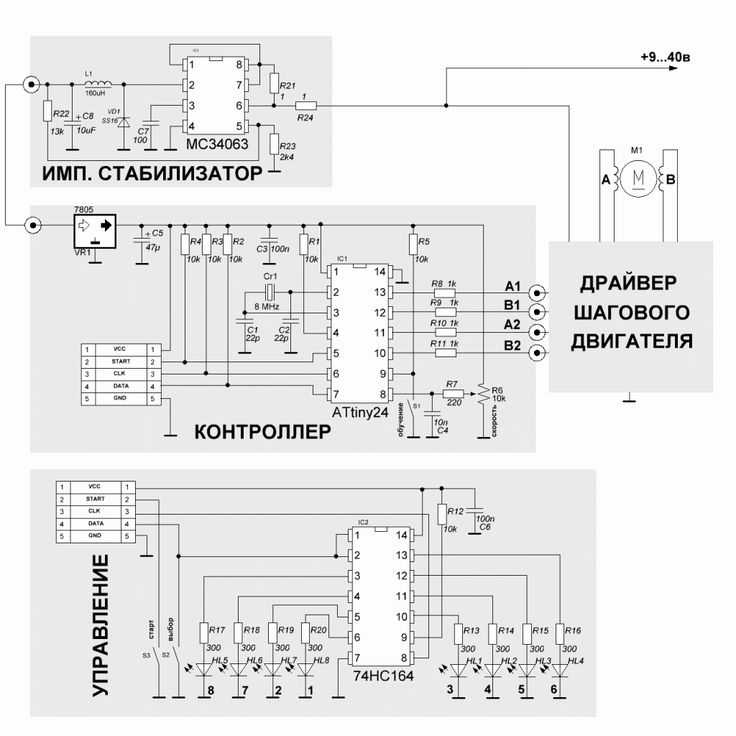
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор – это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.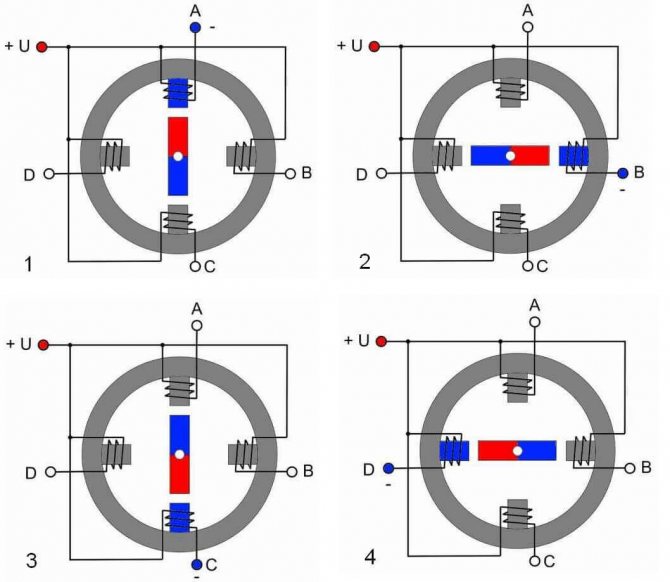
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса – положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8.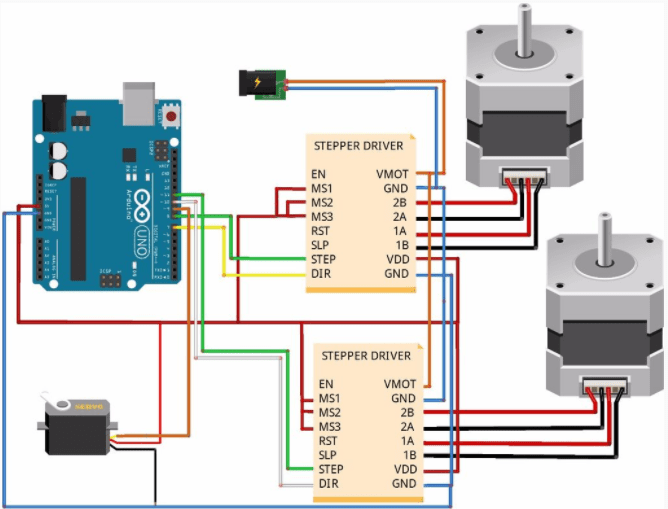 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями – полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг – такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг – поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
В статье подробно рассказано о нескольких способах обновления BIOS на материнской плате Asus.
Теперь вы точно подберете идеальный ноутбук для работы или учебы!
Данная статья описывает преимущества SSD накопителей для приложений и игр. Также здесь выполняется сравнение между достоинств данного накопителя с устаревшим аналогом.
В статье речь идет о том, как отремонтировать пластмассовый китайский электрочайник.
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
 Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ). Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим.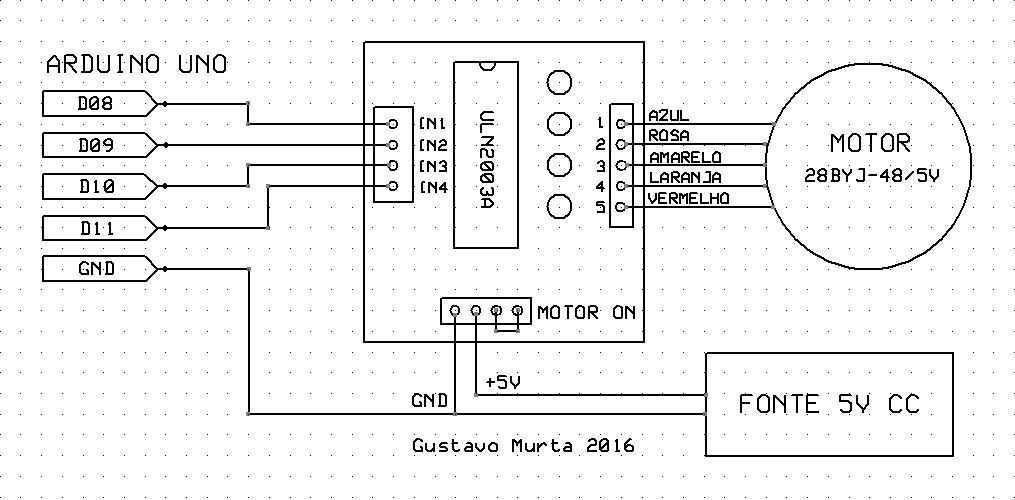 Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов).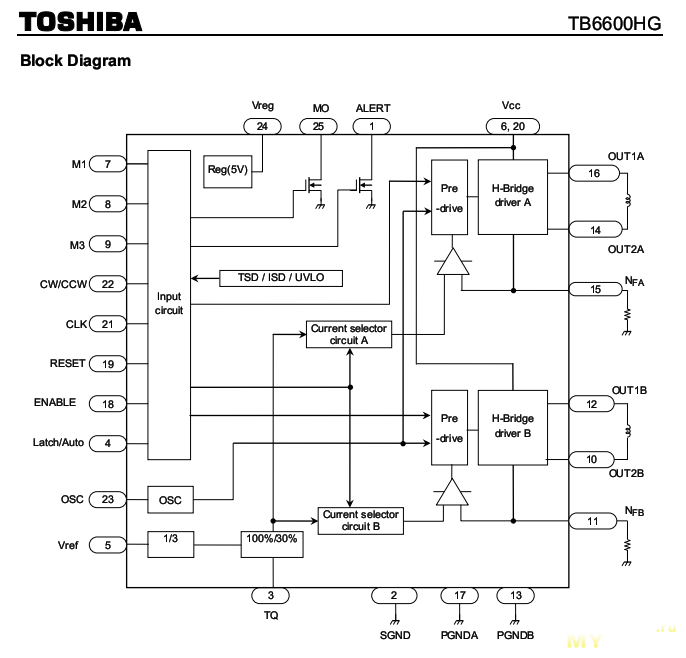 Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д.
Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т. д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5″ дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер.
В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций.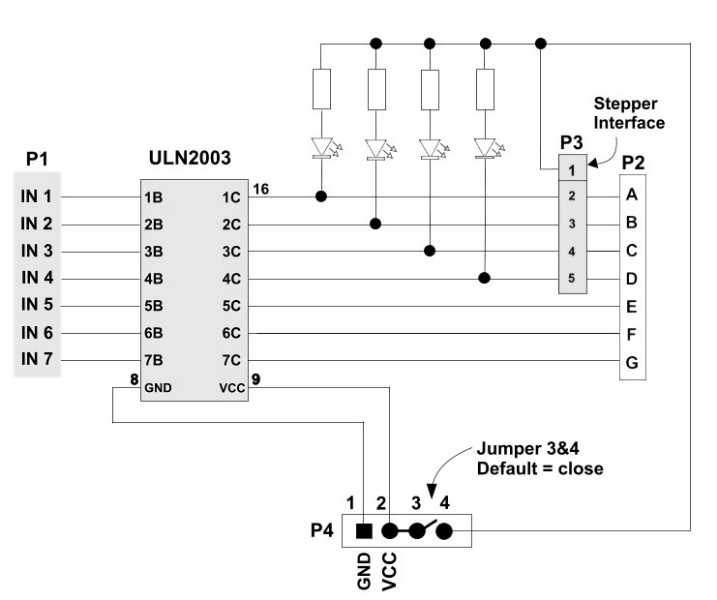 То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.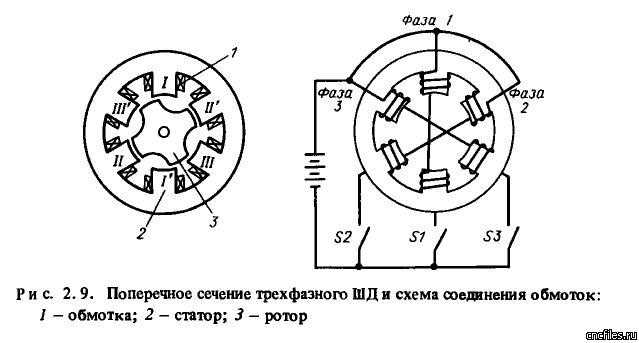
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т. е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
Если присмотреться к этой диаграмме (слева), то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:
Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, чтобы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
R1..R2 = 1 кОм. Когда соответствующая кнопка не нажата — резистор подтягивает напряжение на входе контроллера к +5 В (высокий уровень). При нажатии на кнопку напряжение на входе подтягивается к земле (низкий уровень).
С1, С2 = 0,1 мкФ — керамические конденсаторы.
С3 = 470 мкФ х 16В — электролитический конденсатор.
Программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Собственно говоря, можно прикрутить сюда программный UART и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
Инструкция к драйверу ШД BL-TB6560-V2.0.
Статті 29 14.05.2015 06.12.2016
Содержание
- Введение
- Внешний вид
- Описание
- Схемы подключения
- Подключение драйвера к периферии
- Настройка переключателей
- Подключение силовых цепей
- Светодиодная индикация
Введение:
BL-TB6560-V2.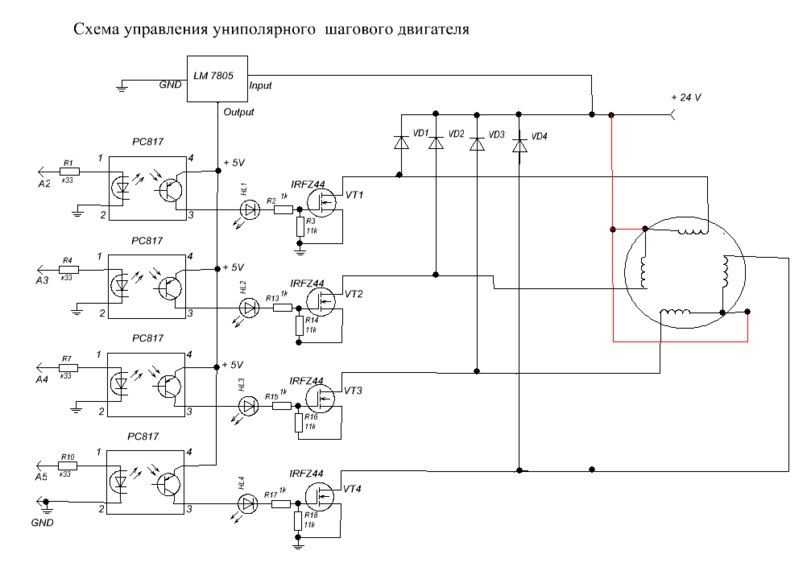 0 — драйвер управления двухфазным шаговым двигателем реализован на специализированном интегральной микросхеме Toshiba TB6560AHQ c питанием постоянным напряжением от 10В до 35В (рекомендуется 24В). Используется для управления двигателями типа Nema17, Nema23 с регулируемым максимальным током фазы до 3А и оптоизолированными входными сигналами. Широко используется в системах ЧПУ и 3D-принтерах.
0 — драйвер управления двухфазным шаговым двигателем реализован на специализированном интегральной микросхеме Toshiba TB6560AHQ c питанием постоянным напряжением от 10В до 35В (рекомендуется 24В). Используется для управления двигателями типа Nema17, Nema23 с регулируемым максимальным током фазы до 3А и оптоизолированными входными сигналами. Широко используется в системах ЧПУ и 3D-принтерах.
Внешний вид:
| Свойства | Параметры |
|---|---|
| Входное напряжение | от 10В до 35В постоянного напряжения (24В рекомендуется) |
| Выходной ток | от 0.3А до 3А (пиковое значение 3.5А) |
| Микрошаг | 1 .. 2 .. 8 .. 16 |
| Регулировки тока | 14 ступеней |
| Температура эксплуатации | от -10 до + 45° С |
| Диагностика | защита от перегрева |
| Размеры | 75мм*50мм*35мм |
| Вес | 73г |
Описание:
Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом. Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
| Маркировка | Описание |
|---|---|
| CLK+,CLK- | Положительный и отрицательный контакты для тактового сигнала |
| CW+,CW- | Положительный и отрицательный контакты для управления направлением вращения оси шагового двигателя |
| EN+,EN- | Положительный и отрицательный контакты для сигнала работы шагового двигателя |
| +24D,GND | Положительный и отрицательный контакты для подключения блока питания |
| A+,A- | Контакты для подключения I фазной обмотки шагового двигателя |
| B+,B- | Контакты для подключения II фазной обмотки шагового двигателя |
Схемы подключения:
Подключения драйвера к плате коммутации или просто контроллеру осуществляется двумя способами, которые зависят от схемотехнического исполнения и конфигурации портов контроллера.
Пример подключения драйвера к контроллеру на NPN ключах с открытым коллектором
Пример подключения драйвера к контроллеру на PNP ключах с открытым коллектором
Примечание:
Значение сопротивлений R_CLK, R_CW, R_EN зависят от напряжения питания VCC:
- При VCC = 5В, R_CLK = R_CW = R_EN = 0;
- При VCC = 12В, R_CLK = R_CW = 1кОм, R_EN = 1.5кОм;
- При VCC = 24В, R_CLK = R_CW = 2кОм, R_EN = 3кОм;
Подключение драйвера к периферии:
Пример подключения драйвера к контролллеру BL-MACH-V1.1 (BB5001)
Представленные на схеме драйвер и контроллер можно приобрести в нашем магазине:
- КУПИТЬ контроллер BL-MACH-V1.
- КУПИТЬ драйвер BL-TB6560-V2.0.
 1
1
Настройка переключателей
Микрошаг (делитель шага) устанавливается с помощью переключателей S3, S4 как показано на рисунке:
Микрошаг — режим управления шаговым двигателем, под которым понимают режим деления шага. Микрошаговый режим отличается от простого режима полношагового управления двигателем тем, что в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону SIN в одной фазе и COS во второй. Такой принцип позволяет фиксировать вал в промежуточных положениях между целыми шагами. Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:16 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/16 полного шага, и для полного оборота вала потребуется подать в 16 раз больше импульсов, чем для режима полного шага.

Значения делителя шага указаны в таблице ниже:
| Значение делителя | S3 | S4 |
|---|---|---|
| 1:1 | OFF | OFF |
| 1:2 | ON | OFF |
| 1:8 | ON | ON |
| 1:16 | OFF | ON |
Настройка выходного тока, который поступает на шаговый двигатель, в режиме удержания осуществляется с помощью переключателя S2:
Удержание ротора — режим работы шагового двигателя когда подача напряжения производится на все обмотки. Момент удержания является одной из характеристик мощности шаговых двигателей.
| Значение тока | S2 |
|---|---|
| 20% | ON |
| 50% | OFF |
Установка выходного тока в рабочем режиме двигателя (вращение) устанавливается с помощью переключателей SW1,SW2,SW3,S1:
| (А) | 0. 3 3 | 0.5 | 0.8 | 1.0 | 1.1 | 1.2 | 1.4 | 1.5 | 1.6 | 1.9 | 2.0 | 2.2 | 2.6 | 3.0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SW1 | OFF | OFF | OFF | OFF | OFF | ON | OFF | ON | ON | ON | ON | ON | ON | ON |
| SW2 | OFF | OFF | ON | ON | ON | OFF | ON | OFF | OFF | ON | OFF | ON | ON | ON |
| SW3 | ON | ON | OFF | OFF | ON | OFF | ON | ON | OFF | OFF | ON | ON | OFF | ON |
| S1 | ON | OFF | ON | OFF | ON | ON | OFF | ON | OFF | ON | OFF | ON | OFF | OFF |
Из-за разности параметров двигателей и их режимов возникает необходимость коррекции формы дискретных импульсов для приближения их к синусоиде. И в драйвере есть такая возможность.
И в драйвере есть такая возможность.
Decay — параметр, который описывает наклон горизонтальной части импульса после переднего фронта (затухание). Для прямоугольного импульса (меандр) — Decay = 0%, для треугольного — Decay = 100%. Функция может быть полезна для выбора оптимального режима работы шагового привода и часто помогает сгладить работу двигателя, уменьшить шум и вибрации.
| % | S5 | S6 |
|---|---|---|
| 0 | OFF | OFF |
| 25 | ON | OFF |
| 50 | OFF | ON |
| 100 | ON | ON |
Подключение силовых цепей:
При подключении шаговых двигателей к драйверу допускается как паралельное, так и последовательное включение. Единственное что необходимо учесть — для паралельного включения выходной ток драйвера необходимо устанавливать выше, а при включении последовательном достаточным будет ток как для одного двигателя.
Схема подключения для четырехвыводного двигателя
Схема подключения шести выводного двигателя при использовании на половину мощности
Схема подключения 6-ти выводного двигателя при использовании на полную мощность
Схема подключения 8-ми выводного двигателя при паралельном подключении обмоток
Схема подключения 8-ми выводного двигателя при последовательном подключении обмоток
Светодиодная индикация
- POWER: индикатор питания
- RUN: индикатор рабочего режима
Тэги:
руководство
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4
Добрый день 3д печатники и ‘колхозники’.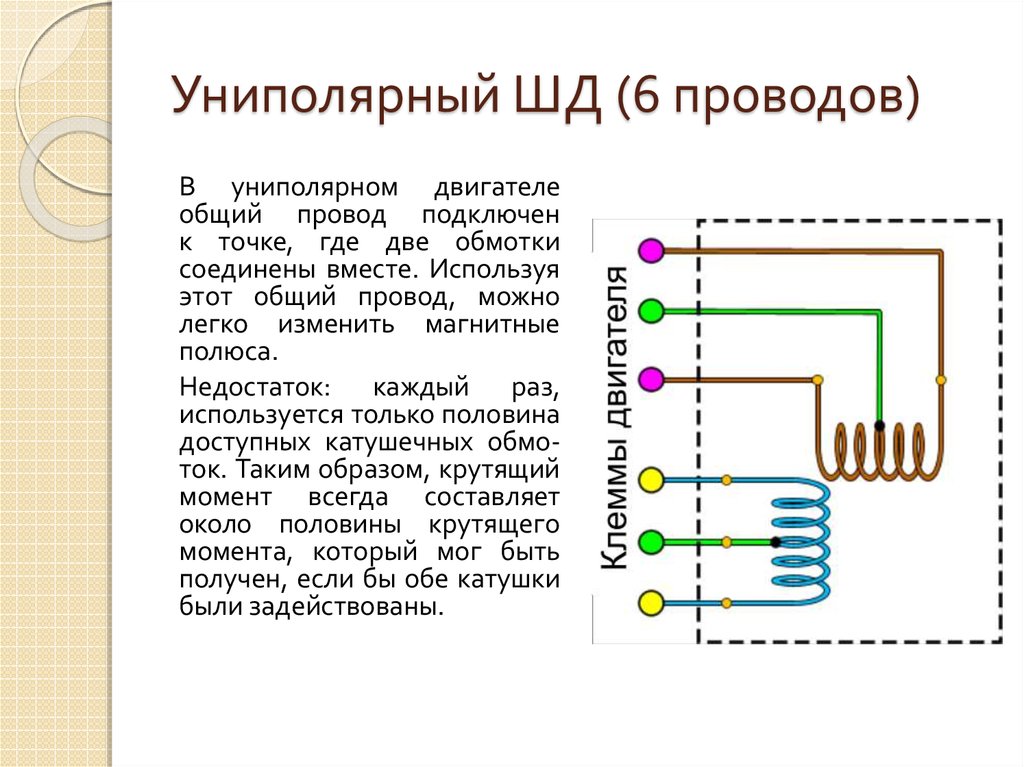
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет шесть проводов, и что бы подключить его к Ramp 1.4 или любой другой плате нам потребуется переделать его из униполярного в биполярный.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.
Немного теории.
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки.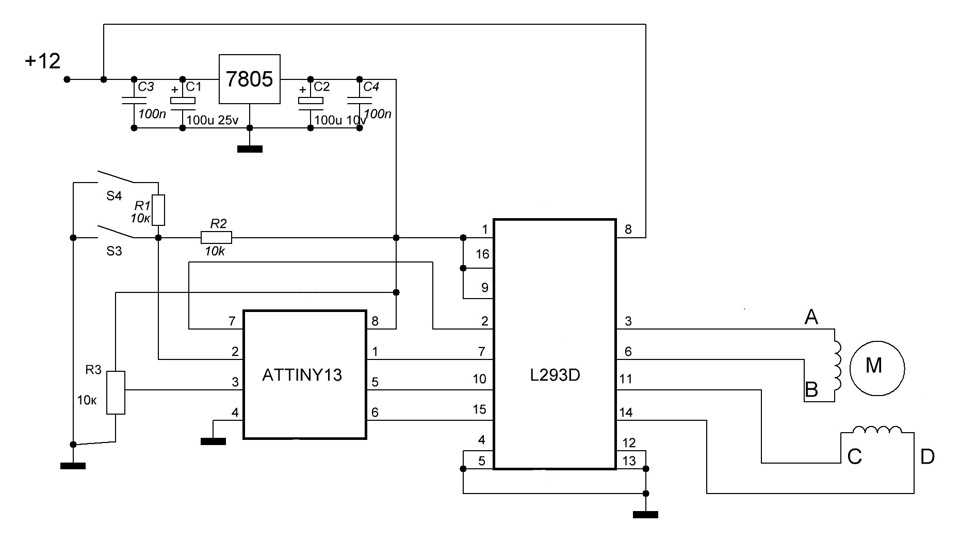 При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
На схеме ниже показаны два двигателя. Слева униполярный, 6 выводов.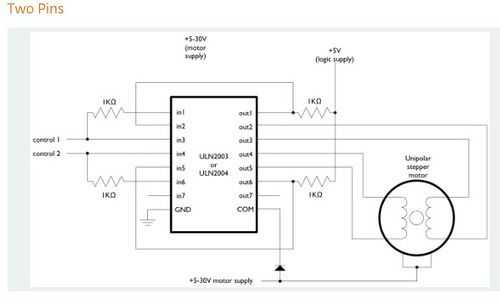 Справа биполярный, 4 вывода.
Справа биполярный, 4 вывода.
Аналогичная схема ниже, но у же с буквенным обозначением выводов.
Слева биполярный, справа униполярный двигатель.
Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.
Я соберу тестовый стенд для наглядности, который включает в себя: ramps 1.4, arduino mega 2560, драйвер шагового двигателя TB6600, плата MKS CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель NEMA 23 57HM56-2006.
1) Первый вариант. Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.
Пошаговая инструкция для чайников :).
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
Предыдущие четыре шага на фото ниже.
Подключаем LSD дисплей и питание к ramps 1.4.
Запускаем двигатель и радуемся результату ;).
2) Второй вариант. Подключаем двигатель к драйверу не используя крайние выводы в обмотках, то есть черный и синий. Таким способом подключения мы получим высокую приемистость.
Пошаговая инструкция уже для опытных мейкеров 8).
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, желтый в разъём 1B, белый в разъём 2A, красный в разъём 2B. Черный и синий провода лучше заизолировать, не ну если Вам нравится прыгать с бубном то не делайте этого.
4) Подключаем питание от 8-45 В к драйверу шагового двигателя TB6600.
Предыдущие четыре шага на фото ниже.
Подключаем LSD дисплей и питание к ramps 1.4.
Таким образом, подключить униполярный шаговый двигатель к ramps 1.4 не так уж и сложно, достаточно немного знать теории и быть внимательным.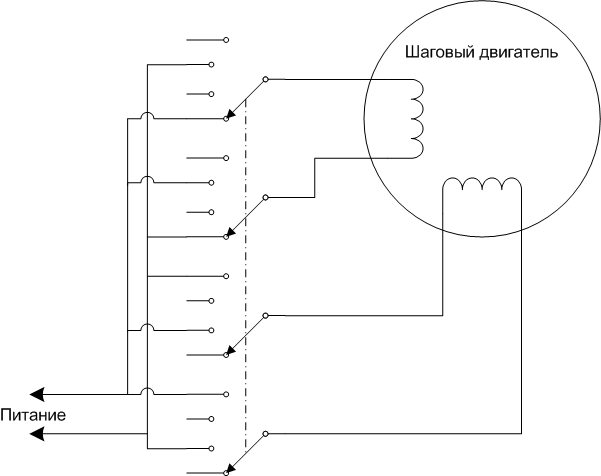 Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется ;).
Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется ;).
Ссылки на компоненты из статьи.
1. Шаговый двигатель nema 23 57HM56-2006;
2. Драйвер шагового двигателя TB6600;
3. Шилд (надстройка) RAMPS 1.4;
4. Плата управления arduino mega 2560;
5. Плата МКС CD 57/86 для внешнего драйвера;
6. LCD Display 2004 RAMPS 1.4.
З.Ы.
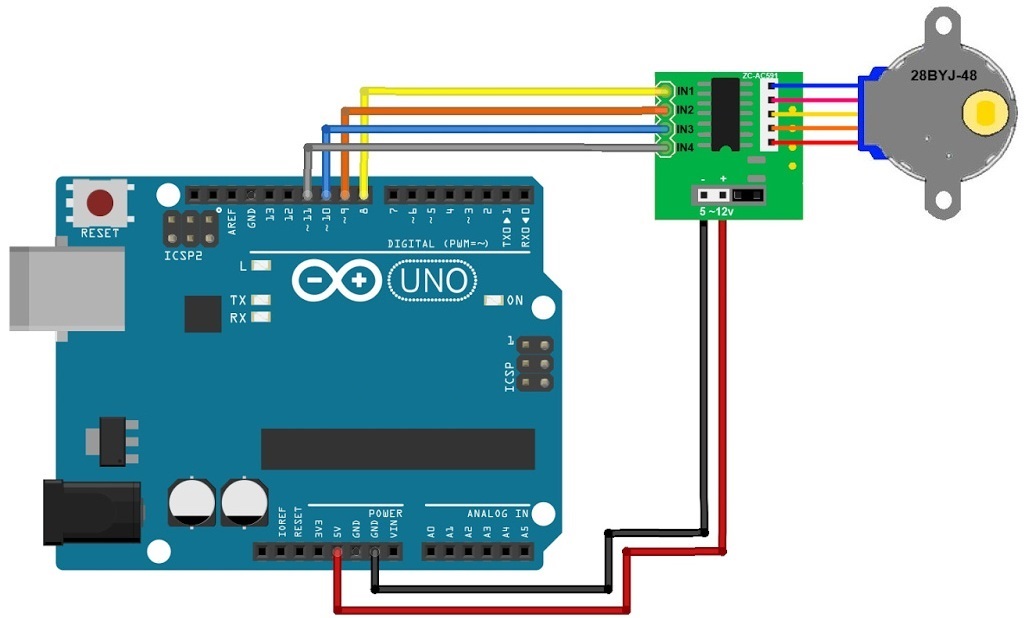
Подключение шагового двигателя 28BYJ-48-5V к Arduino. Часть 2.
В статье мы подробно разберем принцип работы шагового двигателя 28BYJ-48-5V, особенности и подключение драйвера на базе микросхемы ULN2003.
В предыдущей статье =>> мы кратко разобрали подключение шагового двигателя 28BYJ-48-5V к Arduino через драйвер.
Для подключения 4-х фазного шагового двигателя с редуктором 28BYJ-48-5V используется драйвер на базе микросхемы UNL2003A.
Шаговый двигатель 28BYJ-48-5V
Подробное описание и характеристики 5-ти вольтового шагового двигателя 28BYJ-48-5V Вы найдете в карточке товара RKP-28BYJ-48-5V =>>
Добавим лишь немного теории о принципах работы шагового двигателя 28BYJ-48-5V.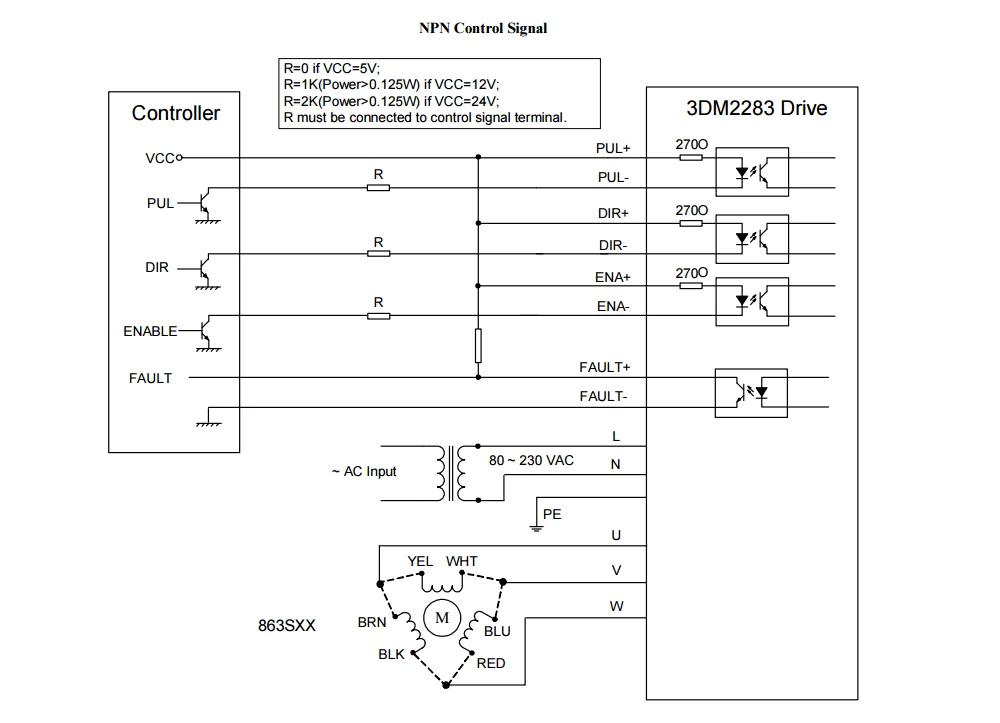
Дискретное перемещение вала двигателя 28BYJ-48-5V позволяет повернуть вал ровно на 60 или 279 градусов и зафиксировать. Двигатель содержит две обмотки, причем каждая имеет отвод от середины. Получается 4 фазы. Отводы обмоток соединены вместе, как изображено на схеме, к ним подключен красный провод.
В результате каждый из контактов четырех фаз соединен с красным проводом.
Двигатель 28BYJ-48-5V относится к однополярным (униполярным) благодаря схеме соединения фаз. К красному проводу подключается питание. Фазы коммутируются силовой электроникой.
Для поворота на требуемый угол или выполнения некоторого количества оборотов на фазы двигателя подают серию импульсов, под действием которых вал поворачивается на серию шагов.
Импульс тока вызывает перемещение вала на угол обусловленный углом, занимаемым на роторе одним магнитом. Увеличение количества полюсов ротора уменьшает шаги, что позволяет нарастить точность позиционирования.
Чаще всего используются два способа управления шаговым двигателем 28BYJ-48-5V: 4 ступени импульсов и 8 ступеней.
В 4-ступенчатом управлении всегда подключены к питанию две из четырех обмоток двигателя – полношаговый метод управления.
Программная библиотека Stepper для Arduino IDE использует именно такой способ управления.
Если фазам по цвету проводов присвоить обозначения А синий, Б розовый, В желтый, Г оранжевый, то получим наименования фаз А, Б, В, Г. Их поочередное включение можно представить в виде последовательной смены сочетаний включенных фаз АБ-БВ-ВГ-ГА-АБ.
В 8-ступенчатой последовательности включается сначала одна фаза потом две, потом опять одна следующая, снова две и так далее. Управление мотором происходит в соответствии с последовательностью: А-АБ-Б-БВ-В-ВГ-Г-ГД-Д-ДА-А.
Драйвер моторов на микросхеме UNL2003A.
Существуют разные модели драйверов (контроллеров) шаговых двигателей. Среди них можно выделить самые популярные в DIY разработках на базе Arduino: L293, ULN2003, A3967SLB.
Как правило, шаговый двигатель 28-BYJ48 используют в паре с драйвером ULN2003.
Список драйверов на базе UNL2003A Вы найдете в конце статьи в разделе «Рекомендуемые товары:» или в категории Драйверы двигателей =>> нашего сайта Robot-Kit.ru.
На фото ниже драйвер шагового двигателя на базе UNL2003A выполнен в формате «микро» =>>
Модуль управления (драйвер) на базе микросхемы UNL2003A предназначен для управления однополярным четырехфазным шаговым двигателем.
Микросхема ULN2003 по сути представляет собой массив транзисторов, включенных по схеме Дарлингтона. Микросхема ULN2003 позволяет управлять нагрузкой до 500 мА (один ключ).
Модуль принимает на себя нагрузку по силовой коммутации токов фаз мотора, защищая управляющую логическую схему от перегрузки по току и от перегрева. Например, при возрастании нагрузки на валу, в этот момент потребление тока увеличивается.
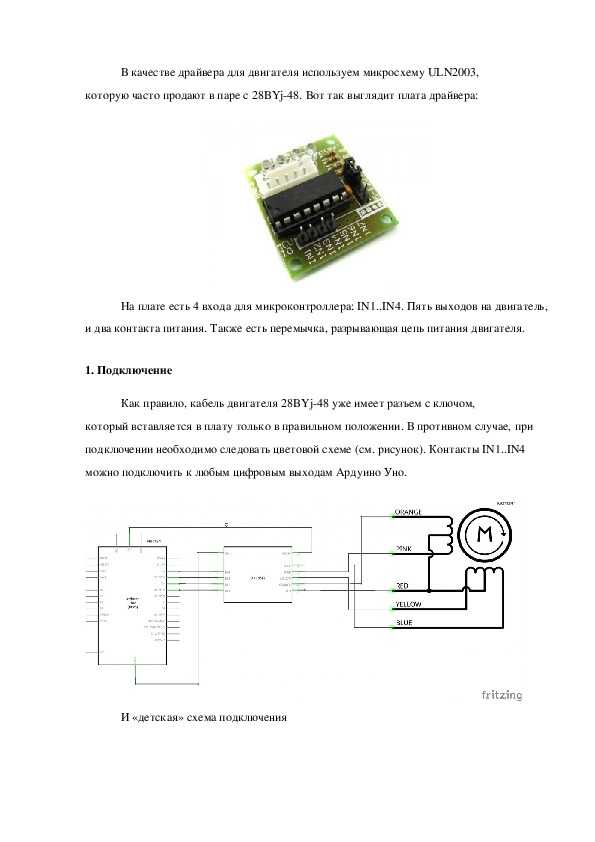
На плате модуля есть 4 входа для микроконтроллера: IN1.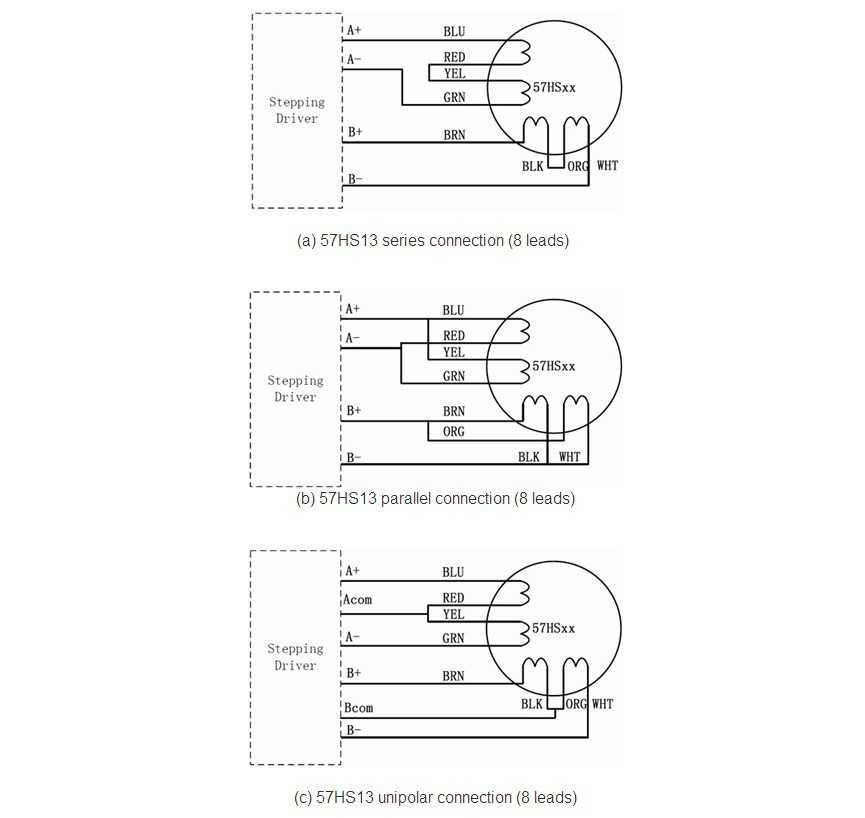 .IN4. Пять выходов на двигатель, и два контакта питания. Также есть перемычка, разрывающая цепь питания двигателя.
.IN4. Пять выходов на двигатель, и два контакта питания. Также есть перемычка, разрывающая цепь питания двигателя.
Примечание. Плата согласования Arduino и шагового двигателя на основе UNL2003A имеет всего одну перемычку, которая замыкает 3 и 4 выводы. Данная перемычка подаёт питание на светодиоды с вывода 2 (так как выводы 2 и 3 спаяны вместе). Если на шаговый двигатель подаётся питание +5 В (как в нашем случае), то данная перемычка позволяет наблюдать за переключением выводов управления шаговым двигателем. Отслеживание свечения светодиодов помогает отладить схему соединения двигателя и управляющую программу. В дальнейшем для экономии тока питания перемычка снимается.
Подключение моторов на микросхеме ULN2003A
Схема соединения двигателя 28BYJ-48-5V и модуля управления ULN2003A.
Как правило, кабель двигателя 28BYJ-48-5V уже имеет разъем с ключом, который вставляется в плату драйвера только в правильном положении.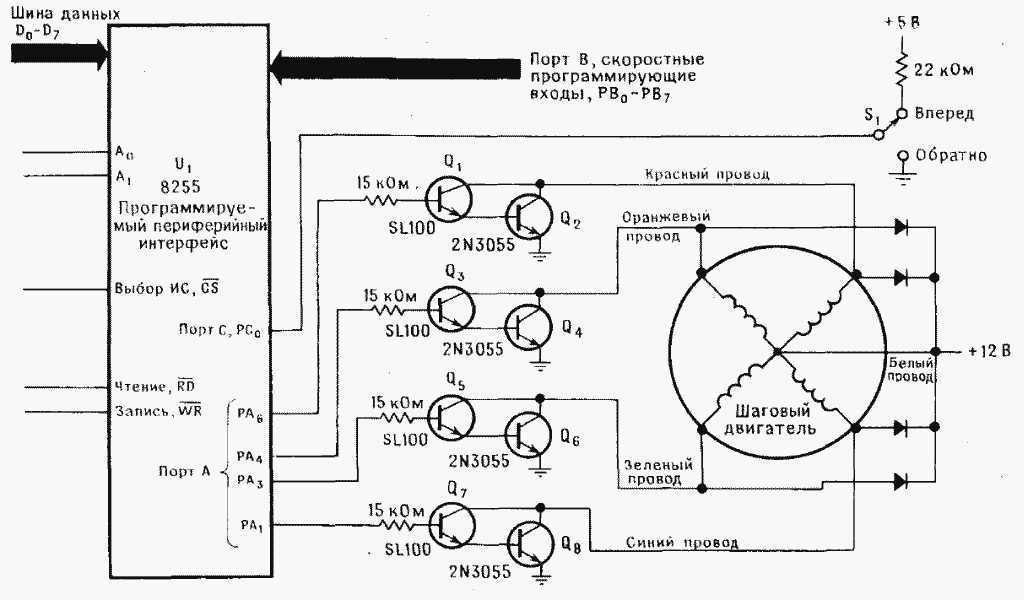 В нашем случае это именно так.
В нашем случае это именно так.
Четыре управляющих входа, помеченные как IN1-IN4, должны быть подключены к четырем цифровым выводам Arduino. Подключаем питание GND к GND и VCC к VIN (не для постоянного использования). Помним, что не рекомендуется запитывать двигатель 28BYJ-48-5V (через драйвер) непосредственно от контакта 5V на плате Arduino. Если для питания Arduino и мотора используются различные источники питания, то необходимо объединить выводы «земля» источников вместе.
Ниже приведена схема подключения на примере модуля ULN2003, платы Arduino UNO R3 и двигателя 28BYJ-48-5V.
ПРОГРАММИРОВАНИЕ В ARDUINO IDE
Программирование для управления шаговым двигателем 28BYJ-48-5V в среде ARDUINO IDE описано в третьей части статьи =>>
Как подключить шаговые двигатели
Контроллер ЧПУ Buildbotics предоставляет четыре драйвера биполярных шаговых двигателей. Он не может управлять униполярными шаговыми двигателями. К счастью, большинство шаговых двигателей можно подключить как биполярные двигатели.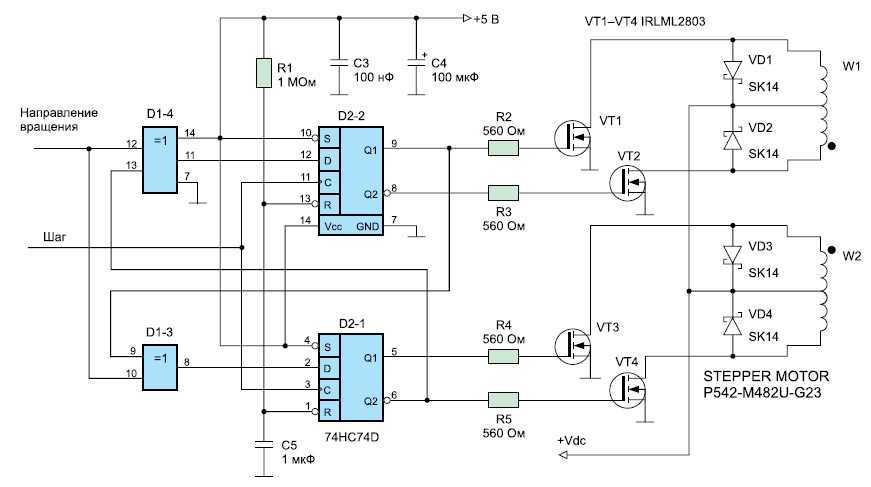
Для подключения шагового двигателя к контроллеру ЧПУ Buildbotics необходимо правильно подключить четыре провода от драйвера к нужным проводам на двигателе. К сожалению, шаговые двигатели бывают разных конфигураций и не всегда сразу понятно, как их подключить. Есть несколько характеристик, которые отличают шаговые двигатели друг от друга. Одно большое отличие заключается в количестве проводов, отходящих от двигателя. Нередко встречаются двигатели с 4, 5, 6 или 8 проводами, выходящими из двигателя. В этой статье обсуждается каждая из этих конфигураций.
Контроллер ЧПУ Buildbotics обеспечивает четыре выхода драйвера двигателя через заднюю панель на портах, помеченных X, Y, Z и A. Все четыре порта подключены одинаково и выглядят следующим образом:
Каждый выход имеет четыре контакта. Верхний левый контакт — B+, нижний левый — B-, верхний правый — A- и нижний правый — A+. B- и B+ должны управлять одной из катушек двигателя, а A- и A+ должны управлять другой катушкой двигателя.
Buildbotics предлагает готовые кабели, которые подключаются к выходам драйвера на одном конце. Эти кабели имеют цветовую маркировку: провод A+ красный, провод A- черный, провод B+ желтый, а провод B- фиолетовый.
Подключение 4-проводных двигателей
Для подключения 4-проводных шаговых двигателей необходимо подключить A+ и A- к одной из катушек двигателя, а B+ и B- к другой катушке двигателя.
Хитрость заключается в том, чтобы выяснить, какие провода составляют пары катушек. Вот три способа выяснить это:
- Найдите документацию на двигатель. Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Приложив немного усилий, обычно можно получить техпаспорт двигателя. В техническом описании обычно провода указываются как A+, A-, B+ и B-, или, по крайней мере, показывается, какие провода по цвету подключаются к каким катушкам.
- Если вы не можете найти техпаспорт, но у вас есть омметр, измерьте сопротивление между любыми двумя проводами двигателя. Если вы измеряете близкое короткое замыкание, то эта пара составляет одну катушку, а два других провода составляют другую катушку. Если это обрыв, то измеряйте между первым проводом и другим проводом, а затем до четвертого провода, пока не найдете короткое замыкание. Обратите внимание, что я говорю почти короткий, потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
- Если у вас нет омметра, большинство людей могут определить пары на ощупь. Валы шагового двигателя вращаются довольно легко, когда катушки двигателя разомкнуты, но их труднее повернуть, когда катушка закорочена. Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело он вращается. Затем скрутите любые два провода вместе. Если двигатель крутится значительно труднее, значит, вы замкнули одну из катушек и идентифицировали пару. Если нет, отсоедините два провода друг от друга и подключите третий провод к первому проводу. Если двигатель не крутится сильнее, отсоедините третий провод от первого провода и подключите четвертый провод. Одна из комбинаций должна вращаться труднее, это одна катушка, а два провода составляют другую катушку. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
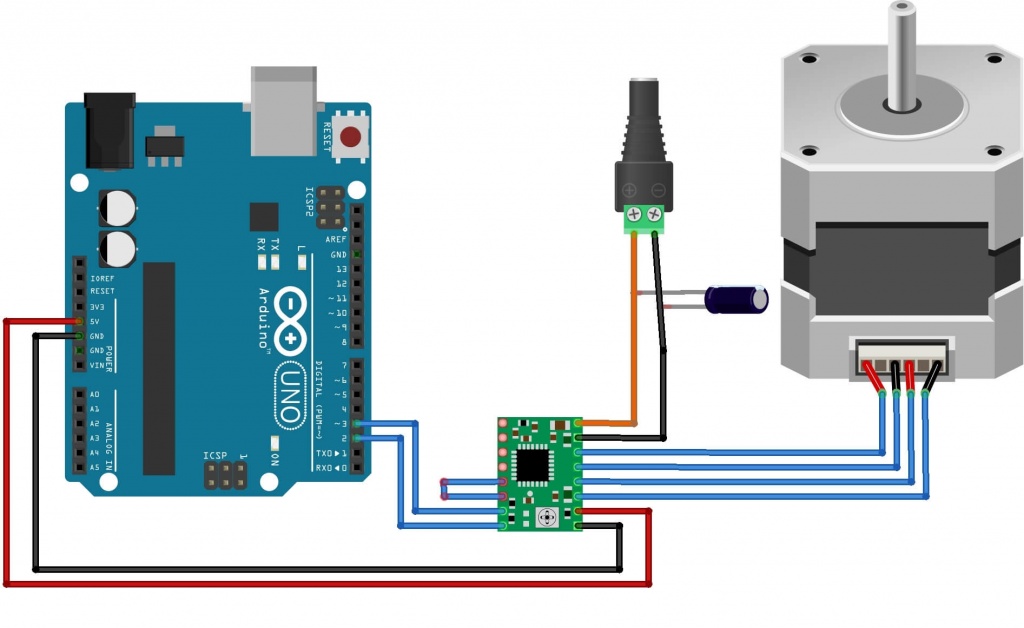 Если вы измеряете близкое короткое замыкание, то эта пара составляет одну катушку, а два других провода составляют другую катушку. Если это обрыв, то измеряйте между первым проводом и другим проводом, а затем до четвертого провода, пока не найдете короткое замыкание. Обратите внимание, что я говорю почти короткий, потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Если вы измеряете близкое короткое замыкание, то эта пара составляет одну катушку, а два других провода составляют другую катушку. Если это обрыв, то измеряйте между первым проводом и другим проводом, а затем до четвертого провода, пока не найдете короткое замыкание. Обратите внимание, что я говорю почти короткий, потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении. Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело он вращается. Затем скрутите любые два провода вместе. Если двигатель крутится значительно труднее, значит, вы замкнули одну из катушек и идентифицировали пару. Если нет, отсоедините два провода друг от друга и подключите третий провод к первому проводу. Если двигатель не крутится сильнее, отсоедините третий провод от первого провода и подключите четвертый провод. Одна из комбинаций должна вращаться труднее, это одна катушка, а два провода составляют другую катушку. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело он вращается. Затем скрутите любые два провода вместе. Если двигатель крутится значительно труднее, значит, вы замкнули одну из катушек и идентифицировали пару. Если нет, отсоедините два провода друг от друга и подключите третий провод к первому проводу. Если двигатель не крутится сильнее, отсоедините третий провод от первого провода и подключите четвертый провод. Одна из комбинаций должна вращаться труднее, это одна катушка, а два провода составляют другую катушку. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.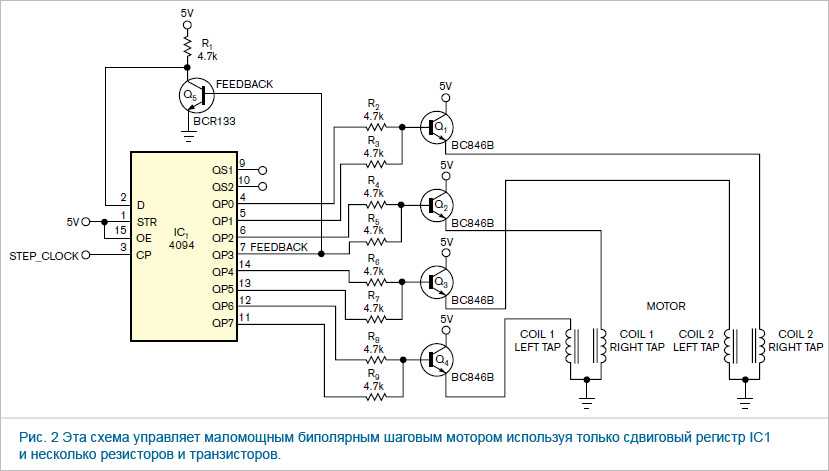
Подключение 5-проводных двигателей
5-проводные двигатели являются строго униполярными двигателями и не могут подключаться как биполярные двигатели. Таким образом, они несовместимы с контроллером ЧПУ Buildbotics.
Подключение 6-проводных двигателей
6-проводных двигателей можно сконфигурировать как однополярные или биполярные последовательные двигатели. Контроллер ЧПУ Buildbotics не поддерживает униполярные двигатели. Здесь показаны биполярные последовательные соединения.
6-проводные двигатели имеют две катушки с центральным отводом и обнажают концы катушек и проводник с центральным отводом катушки. Это три провода для каждой из двух катушек. Центральные отводы не подключены, а концы катушки подключены, как показано на рисунке. Хитрость заключается в том, чтобы выяснить, какие провода принадлежат каждой катушке, а какой из этих проводов является центральным проводником. Вот два метода:
- Найдите документацию на двигатель. Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Возможно, вам придется позвонить продавцу. Приложив немного усилий, обычно можно получить техпаспорт двигателя. В техническом описании обычно провода указываются как A+, A-, B+ и B-, или, по крайней мере, показывается, какие провода по цвету подключаются к каким катушкам.
- Используйте омметр для идентификации отдельных катушек. Любые провода, которые кажутся соединенными с сопротивлением в несколько Ом, будут частью одной катушки. Провода, которые кажутся разомкнутыми, являются частью разных катушек. Произвольно выберите одну из катушек как «А», а другую как «В». После того, как катушки были идентифицированы, измерьте сопротивление между каждым из трех проводов на этой катушке. Сопротивление между двумя концами катушки примерно в два раза превышает сопротивление между любым концом катушки и центральным отводом катушки. Когда концы катушки определены, произвольно выберите один из концов как «+», а другой как «-» для каждой катушки. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
 Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Возможно, вам придется позвонить продавцу. Приложив немного усилий, обычно можно получить техпаспорт двигателя. В техническом описании обычно провода указываются как A+, A-, B+ и B-, или, по крайней мере, показывается, какие провода по цвету подключаются к каким катушкам.
Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Возможно, вам придется позвонить продавцу. Приложив немного усилий, обычно можно получить техпаспорт двигателя. В техническом описании обычно провода указываются как A+, A-, B+ и B-, или, по крайней мере, показывается, какие провода по цвету подключаются к каким катушкам.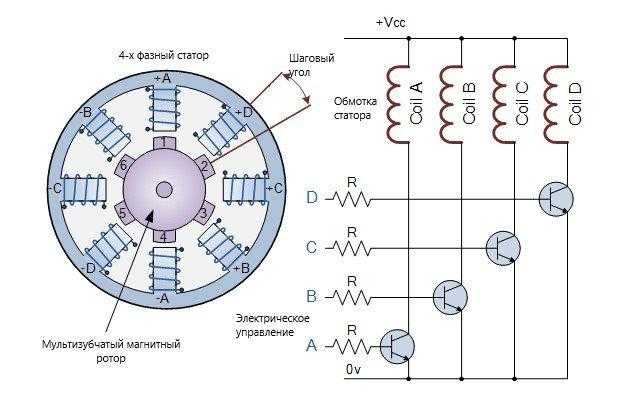 Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.Подключение 8-проводных двигателей
Восьмипроводные двигатели могут быть сконфигурированы как униполярные, биполярные последовательные или биполярные параллельные двигатели. Контроллер ЧПУ Buildbotics не поддерживает однополярные соединения. Перед настройкой 8-проводного двигателя необходимо сначала решить, следует ли настроить двигатель как биполярный последовательный или как биполярный параллельный двигатель. Двигатели с биполярным параллельным соединением, как правило, обеспечивают более высокую максимальную скорость, но потребляют в два раза больше тока, чем двигатели с последовательным соединением. Последовательную конфигурацию следует использовать, если ток параллельной конфигурации превышает выходную мощность драйвера. Особенно это касается больших двигателей. В случае контроллера ЧПУ Buildbotics максимальный ток составляет 6 ампер для любого отдельного порта двигателя.
Особенно это касается больших двигателей. В случае контроллера ЧПУ Buildbotics максимальный ток составляет 6 ампер для любого отдельного порта двигателя.
На следующей схеме показаны соединения для 8-проводного последовательного биполярного шагового двигателя.
На следующей схеме показаны соединения для 8-проводного параллельного биполярного шагового двигателя.
Перебрать все возможные комбинации соединений с помощью омметра или на ощупь нереально. Для подключения нужен паспорт двигателя. Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Возможно, вам придется связаться с продавцом, чтобы получить паспорт двигателя. В техническом описании провода обычно указываются как A1+, A1-, A2+, A2-, B1+, B1-, B2+ и B2- или что-то в этом роде. Учитывая эту информацию, просто подключите двигатели, как показано на схемах выше.
Модернизация Dyna Myte 2400 контроллером ЧПУ Buildbotics
Как использовать драйвер шпинделя VFD
Первые впечатления от Oxlasers Диодный лазер мощностью 3,5 Вт, длина волны 450 нм
Что нового в CAMotics v1.
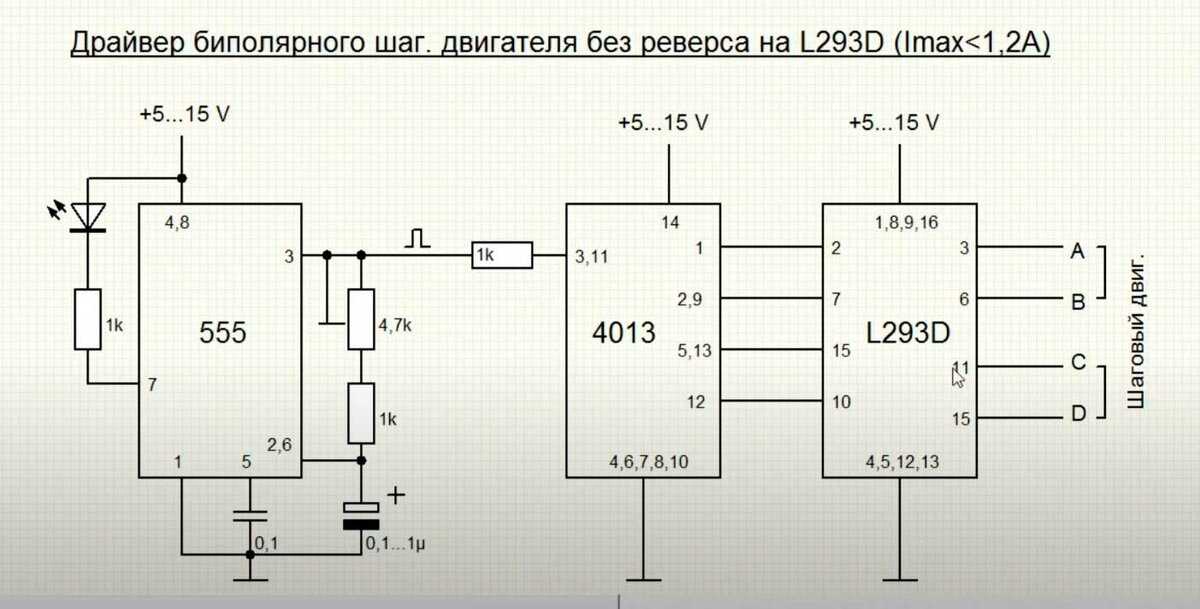 1.0?
1.0?
Преобразование файлов 2D DXF в GCode
Надежный контроллер ЧПУ с открытым исходным кодом
Фрезерный станок с ЧПУ OX на базе контроллера Buildbotics
Подключение ЧПУ к WiFi
ЧПУ 6040 Buildbotics Рэнди Савелла со шпинделем Huanyang VFD
Самодельный фрезерный станок с ЧПУ Doug’s Buildbotics
Buildbotics I/O Breakout
Фрезерный станок с ЧПУ Taig на базе Buildbotics
Модернизация струйной мельницы Matt Dralle’s Buildbotics
Buildbotics + CAMotics на выставке Maker Faire 2017
K40 ЛАЗЕРНЫЙ Резак
Подключение ШИМ-шпинделя
Руководство по подключению шагового двигателя — 42 бота
Иногда вы можете встретить старый шаговый двигатель, извлеченный из принтера, или древний дисковод. Если вам повезет, на двигателе будет номер детали, и, немного покопавшись, вы найдете техническое описание. Однако часто у вас будет двигатель без какой-либо маркировки и с четырьмя или шестью торчащими разноцветными проводами. Во-первых, вам нужно выяснить, как провода соединяются в пары для формирования катушек внутри двигателя. Метод проб и ошибок может сработать, но есть лучший способ! Все, что нужно, это мультиметр.
Если вам повезет, на двигателе будет номер детали, и, немного покопавшись, вы найдете техническое описание. Однако часто у вас будет двигатель без какой-либо маркировки и с четырьмя или шестью торчащими разноцветными проводами. Во-первых, вам нужно выяснить, как провода соединяются в пары для формирования катушек внутри двигателя. Метод проб и ошибок может сработать, но есть лучший способ! Все, что нужно, это мультиметр.
Как определить пары катушек четырехпроводного шагового двигателя с помощью мультиметра
Если ваш шаговый двигатель имеет 4 провода, это биполярный шаговый двигатель. Биполярные шаговые двигатели имеют две обмотки, которые не соединены друг с другом и имеют внутреннюю разводку следующим образом:
Поскольку катушки A и B на приведенной выше схеме не подключены, сопротивление между выводами A1 и B1 или между выводами A1 и B2 будет бесконечно. Сопротивление между A1 и A2 или между B1 и B2 будет определенно меньше бесконечности (хотя и больше нуля), поскольку они являются частью одной и той же обмотки. Физическое расположение проводов или цвета могут иногда указывать на сопряжение, как показано на фотографиях ниже. Тем не менее, простая проверка с помощью мультиметра, настроенного на измерение сопротивления, может сэкономить вам много времени на поиск и устранение неисправностей кода и проводки.
Физическое расположение проводов или цвета могут иногда указывать на сопряжение, как показано на фотографиях ниже. Тем не менее, простая проверка с помощью мультиметра, настроенного на измерение сопротивления, может сэкономить вам много времени на поиск и устранение неисправностей кода и проводки.
Изображение 1. Черный и желтый провода не являются частью одной катушки, так как мультиметр показывает высокое (бесконечное) сопротивление , так как мультиметр показывает сопротивление примерно 18 Ом.
Теперь, когда мы определили, какие провода относятся к каждой катушке, как нам определить правильную полярность шагового двигателя? К сожалению, это невозможно сделать с помощью мультиметра… Подключите двигатель к выбранному драйверу двигателя. Подключите питание и запустите код, чтобы двигатель вращался по часовой стрелке. Если двигатель вращается в ожидаемом направлении, у вас правильная полярность. Если крутится наоборот, нужно поменять полярность одной из двух пар (не важно какой).
Как определить пары катушек шестипроводного шагового двигателя с помощью мультиметра
Шаговые двигатели с шестью проводами являются униполярными и имеют одну обмотку на фазу (как и биполярные шаговые двигатели), но с центральным отводом. Внутренняя разводка этих двигателей выглядит так:
Глядя на схему выше, можно предположить, что сопротивление между A1 и AC будет вдвое меньше, чем между A1 и A2. Это связано с тем, что между AC и A1 меньше провода, чем между двумя концами катушки A, A1 и A2. То же самое относится к сопротивлению между BC и B1 или B2. Как и в случае с биполярным 4-проводным шаговым двигателем, между любыми проводами от катушки B и катушки A нет соединения (бесконечное сопротивление). Пришло время проверить теорию!
Изображение 3: Черный и коричневый провода, очевидно, являются частью одной катушки (сопротивление примерно 194 Ом). ) также являются частью той же катушки (сопротивление примерно 97 Ом).
Верхний красный должен быть центральным отводом катушки с черным и коричневым проводами, так как сопротивление между красным и черным проводами вдвое меньше сопротивления между черным и коричневым проводами.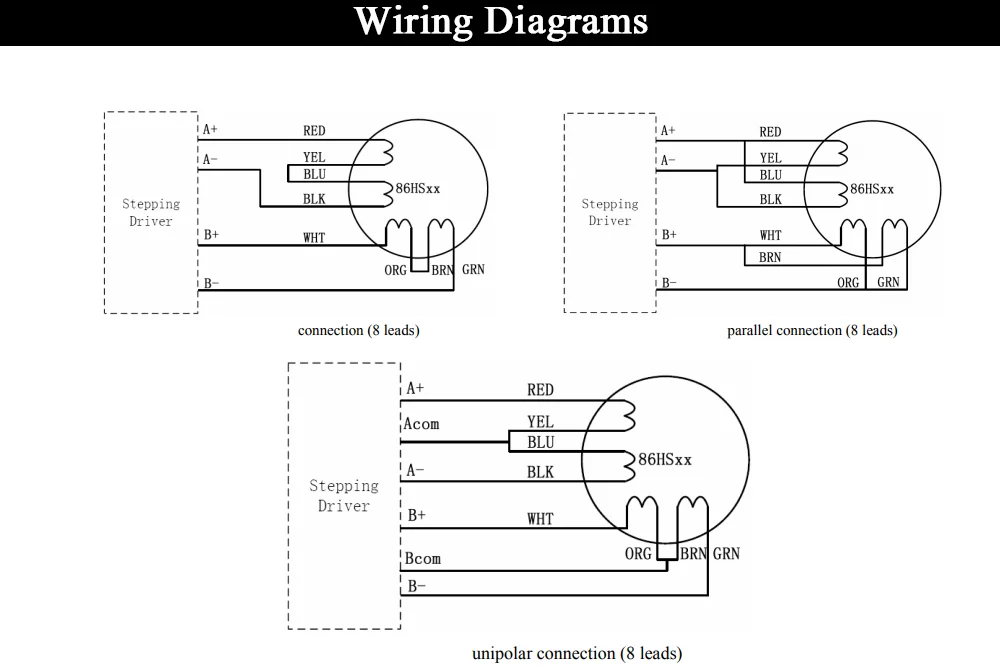 Для надежности вам также следует измерить сопротивление между верхним красным и коричневым проводом, чтобы убедиться, что оно также составляет около 97 Ом.
Для надежности вам также следует измерить сопротивление между верхним красным и коричневым проводом, чтобы убедиться, что оно также составляет около 97 Ом.
Изображение 5: Желтый провод не должен быть частью той же катушки, что и черный, коричневый и верхний красный провода. Мультиметр не показывает электрического соединения между желтым и черным проводами.
Чтобы убедиться, я также перепроверил сопротивление между нижним красным и желтым проводами, а также сопротивление между желтым и оранжевым проводами. Другое измерение подтвердило, что два красных провода также не подключены.
Окончательный вердикт:
Одна катушка – это черный и коричневый провода, а верхний красный провод служит центральным ответвлением.
Другая катушка – это желтый и оранжевый провода, а нижний красный провод используется в качестве центрального ответвления.
Если ваш двигатель имеет 5 проводов проверьте, не подключен ли один из проводов к корпусу двигателя. Если это так, отметьте его, а затем выполните тот же тест, что и для четырехпроводного шагового двигателя. Если нет, то вы смотрите на униполярный двигатель, в котором два центральных язычка соединены. Дешевый шаговый двигатель 28byj-48 (см. учебник) является примером этого.
Если это так, отметьте его, а затем выполните тот же тест, что и для четырехпроводного шагового двигателя. Если нет, то вы смотрите на униполярный двигатель, в котором два центральных язычка соединены. Дешевый шаговый двигатель 28byj-48 (см. учебник) является примером этого.
Вы по-прежнему можете использовать тест сопротивления для определения центрального ответвления, но сопротивление между остальными 4 проводами будет одинаковым из-за общего центрального ответвления. Здесь будут полезны некоторые пробы и ошибки или хорошая документация.
Если ваш двигатель имеет 8 проводов, внутренняя проводка должна выглядеть следующим образом.
У меня еще никогда не было шаговых двигателей такого типа, поэтому я не могу говорить здесь по опыту, но с помощью мультиметра и проверки пар проводов вы должны получить пары (в конечном итоге). Вам нужно будет проделать дополнительную работу, чтобы определить, какие пары находятся на одной катушке.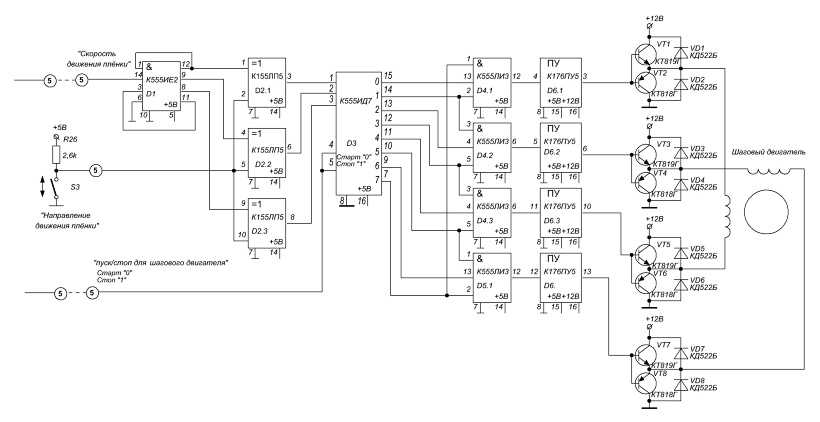 Вероятно, это потребует некоторых проб и ошибок, используя ваш драйвер шагового двигателя.
Вероятно, это потребует некоторых проб и ошибок, используя ваш драйвер шагового двигателя.
Подключение шагового двигателя — RepRap
Почти все драйверы шагового двигателя RepRap являются биполярными (в отличие от однополярных ), поэтому, если вы используете стандартные драйверы, вам понадобится шаговый двигатель, который можно подключить как биполярный.
Чтобы правильно подключить любой шаговый двигатель, нам нужно определить, какие провода являются «парами» или подключены к концам каждой катушки. Их обычно называют катушкой «А» и катушкой «В», но не так важно, как вы думаете.
На этом рисунке показано подключение 6-проводных шаговых двигателей:
Четырехпроводные двигатели не имеют общего провода. Мы будем использовать все четыре провода, и нам нужно только определить, какие провода составляют две пары.
Пятипроводные двигатели имеют эти два общих провода на каждой катушке, соединенные внутри и открытые как один провод. Эта конфигурация не будет работать со стандартной электроникой RepRap. Если не считать открытия шагового двигателя и его внутренней проводки, вам придется приобрести другой двигатель. В BrickRap используются пятипроводные двигатели 28BJY-48, управляемые драйвером двигателя Pololu. У двигателя 28BJY-48 один из проводов удален/перерезан, ищите «биполярный двигатель 9».0205 в гугле, инструкции, хакадай и т. д.
Эта конфигурация не будет работать со стандартной электроникой RepRap. Если не считать открытия шагового двигателя и его внутренней проводки, вам придется приобрести другой двигатель. В BrickRap используются пятипроводные двигатели 28BJY-48, управляемые драйвером двигателя Pololu. У двигателя 28BJY-48 один из проводов удален/перерезан, ищите «биполярный двигатель 9».0205 в гугле, инструкции, хакадай и т. д.
Шестипроводные двигатели подключены, как показано на рисунке. Мы не будем использовать два общих провода, но в остальном он идентичен четырехпроводной версии.
Восьмипроводные двигатели имеют независимый провод на каждом конце этих четырех катушек. Вы соединяете внутренние концы катушек друг с другом, чтобы получился шестипроводной двигатель, затем игнорируете их, чтобы посмотреть на четырехпроводной двигатель. Проводка сложная, см. ниже.
Содержание
- 1 Соединители, обжим и повторное соединение
- 2 провода
- 3 Методы и процедуры
- 3. 1 «пара» проводов на 4-проводных двигателях
- 3,2-парные провода на 6-проводных двигателях
- Спичечная катушка 3,3 для 8-проводного шагового двигателя
- 3.4 Подключите его к драйверу шагового двигателя
- 3.5 Двигатель движется в неправильном направлении
- 3.
- 4 Дальнейшее чтение
 1 «пара» проводов на 4-проводных двигателях
1 «пара» проводов на 4-проводных двигателяхСоединители, обжим и повторная распиновка
Обычный разъем, используемый в шаговых двигателях, — это серия JST-PH, в частности, JST-PH6 (стиль JST, серия PH, 6 позиций), номер по каталогу Digikey 455-1162-ND.
Штыри для этих разъемов можно приобрести у таких поставщиков, как DigiKey, а правильный номер детали для обычного провода 24AWG — 455-2148-1-ND. Другие калибры см. в соответствующих продуктах.
Для тех, у кого нет обжимного инструмента или кто не хочет хлопот, у JST теперь есть IDC (разъем для смещения изоляции), который не требует использования каких-либо специализированных инструментов. Номер детали DigiKey для 6-контактного совместимого разъема JST-PH (исх.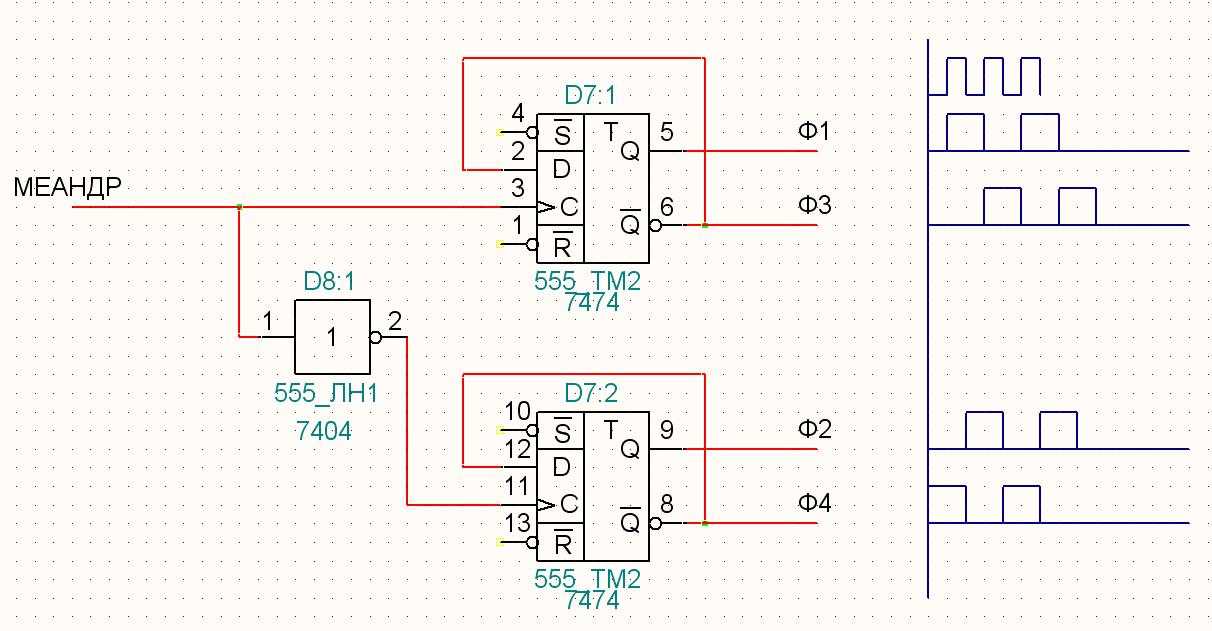 № 06KR-6H-P): 455-2687-ND.
№ 06KR-6H-P): 455-2687-ND.
Для обжима не рекомендуется делать это вручную плоскогубцами или покупать инструмент производителя за 1500 долларов, вместо этого вы можете легко использовать инструмент без храповика, такой как Sargent Tools 1026CT, который стоит 30 долларов, или Waldom/GC. Электроника W-HT-1921, которая стоит 20 долларов от DigiKey.
Переустановка разъема возможна и довольно легко выполняется путем аккуратного сгибания пластикового фиксатора для отдельного штифта на разъеме и осторожного вытягивания провода из корпуса разъема. Не тяните за провод до того, как поднимите стопорный язычок, так как стопорная шпилька на самом штифте может зацепиться за язычок жатки, что усложнит весь процесс. Для повторной установки штифта требуется усилие, достаточное только для того, чтобы стопорная шпора прошла за язычок фиксатора и защелкнулась.
Провода
Могут быть 26AWG, опишите, как они используются в различных двигателях Wantai, или 24AWG, как указано ниже и в [[1]]. Кабель Ethernet и провод 28AWG, вероятно, не подходят для двигателей большой мощности. Вам нужна многожильная проволока, а не одинарная проволока, чтобы жилы могли немного растягиваться, чтобы уменьшить внезапное натяжение.
Кабель Ethernet и провод 28AWG, вероятно, не подходят для двигателей большой мощности. Вам нужна многожильная проволока, а не одинарная проволока, чтобы жилы могли немного растягиваться, чтобы уменьшить внезапное натяжение.
Методы и процедуры
Так как же определить, какой провод какой? Вот вам процесс.
Примечание о торцевых упорах : некоторые прошивки RepRap (например, Marlin) будут искать концевые упоры для подключения при проверке проводки двигателя, как указано выше. В этом случае вы можете увидеть, как ваш двигатель плавно движется в одном направлении, но совсем не движется в другом (так как он думает, что сработал концевой упор). Если ваша прошивка позволяет вам отключать концевые упоры, вы должны сделать это для проверки проводки двигателя или, в качестве альтернативы, вы можете подключить двигатель к разъему шагового двигателя экструдера, чтобы убедиться, что он движется плавно в каждом направлении.
«пара» проводов на 4-проводных двигателях
Здесь нужно найти две пары проводов, которые подключены к каждой из двух катушек.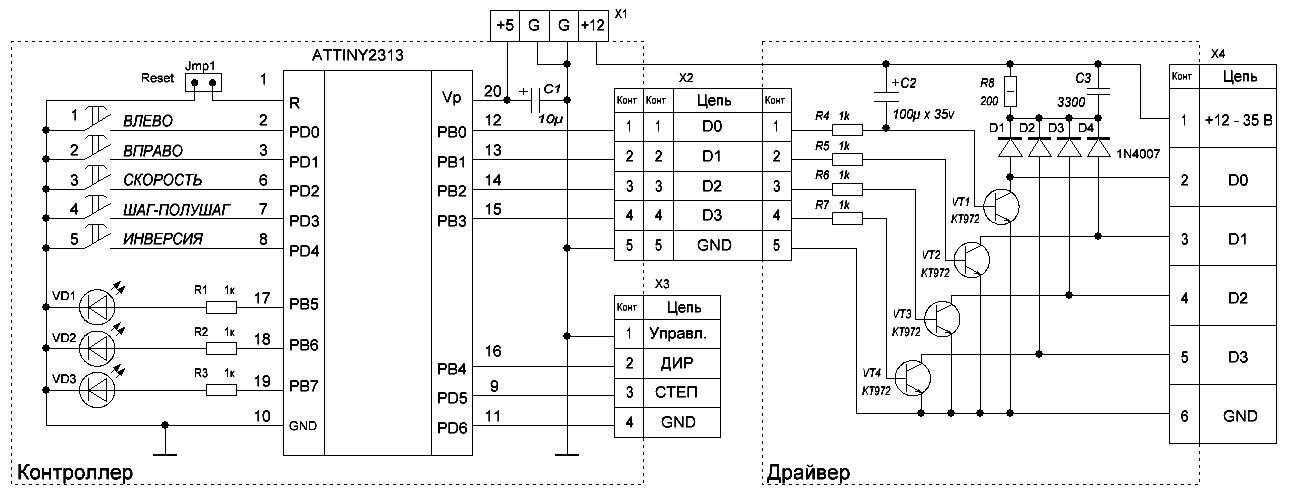
- Метод с помощью омметра
- Просто измерьте сопротивление пар проводов. Если сопротивление составляет всего несколько Ом (< 100 Ом), вы нашли пару. Два других провода должны составлять другую пару.
- Методы без омметра
- Сначала попробуйте провернуть двигатель пальцами и обратите внимание, насколько это трудно. Затем соедините провода попарно. Если мотор крутится заметно сильнее, вы нашли пару.
- Другой метод заключается в использовании светодиода, поднесите любые два провода к концам светодиода и поверните двигатель (поверните в обоих направлениях), светодиод загорится, если провода пара, меняйте местами провода, пока не загорится ВЕЛ.
- Метод проб и ошибок
- (Воспроизведено из этого руководства с любезного разрешения Rustle Laidman на StepperWorld.com.)
- Подсоедините 4 провода катушки к контроллеру любыми схемами. Если это не сработает сначала, вам нужно попробовать только эти 2 свопа:
| Имя | А | Б | С | Д |
|---|---|---|---|---|
| Произвольный первый порядок подключения | 1 | 2 | 4 | 8 |
| Концевая пара переключателя | 1 | 2 | 8 | 4 |
| Переключатель средней пары | 1 | 8 | 2 | 4 |
- Вы закончили, когда двигатель плавно вращается в любом направлении. Если двигатель вращается в направлении, противоположном желаемому, поменяйте местами провода так, чтобы ABCD стал ABDC (поменяйте местами одну катушку) или DCBA (поверните всю вилку).
 Если двигатель вращается в направлении, противоположном желаемому, поменяйте местами провода так, чтобы ABCD стал ABDC (поменяйте местами одну катушку) или DCBA (поверните всю вилку).
Если двигатель вращается в направлении, противоположном желаемому, поменяйте местами провода так, чтобы ABCD стал ABDC (поменяйте местами одну катушку) или DCBA (поверните всю вилку).- Эта процедура не всегда выполняется в два этапа (например, если в настройках требуется, чтобы «1» соответствовало «4»). Поменяй местами 2-й на 4-й, а затем 2-й на 3-й, будет более верным.
«пара» проводов на 6-проводных двигателях
На шестипроводных двигателях вы найдете две группы по три провода, в которых все три провода электрически соединены друг с другом. Эти провода подключены к одной и той же катушке, один в центре катушки, два на их концах. Соответственно две из возможных пар имеют меньшее сопротивление, одна пара – большее. Возьмите пару с более высоким сопротивлением и игнорируйте третий провод.
Здесь также может работать метод без омметра. Ожидайте не два, а три этапа сопротивления повороту. Вам нужны две пары, которые дают наибольшее сопротивление повороту.
После того, как вы узнали, какие два из шести проводов игнорировать (по одному в каждой группе), вы можете действовать так, как если бы у вас были четырехпроводные двигатели.
катушки для 8-проводного шагового двигателя
Если у вас есть 8-проводной шаговый двигатель, у вас будет 4 катушки. Вам нужно определить, какие пары катушек «одинаковые». Есть две «пары», которые по сути одинаковы. Вы хотите соединить эти две пары последовательно, чтобы у вас было только две катушки, каждая в два раза длиннее. Также нужно соединить их так, чтобы две катушки «дополняли» друг друга — полярность имеет значение.
Самый простой способ — найти техпаспорт. В то время как другие типы шаговых двигателей упрощают определение правильных катушек, вероятно, будет проще и быстрее прочитать техническое описание для 8-проводных двигателей.
Если вы не можете найти техническое описание, не все потеряно. Выберите две катушки наугад, подключите их и посмотрите, работает ли это.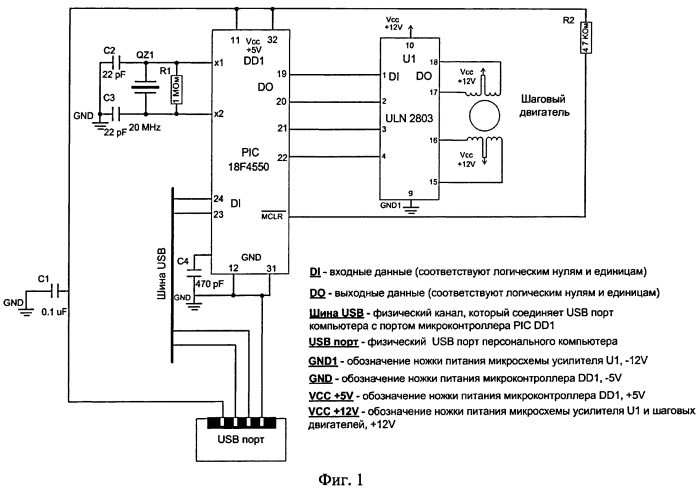 Если он поворачивается, у вас есть две катушки, которые не являются половинками одной и той же катушки. Затем вы можете «добавлять» другие катушки по одной, пробуя разные конфигурации и полярности, пока не определите не только, какие две катушки какие, но и каким образом их нужно подключить. Подумайте об этом, это просто, но несколько сложно. Поскольку нам все равно, в каком направлении крутится степпер, мы можем исключить множество возможностей и просто задать себе простой вопрос «а он крутится?».
Если он поворачивается, у вас есть две катушки, которые не являются половинками одной и той же катушки. Затем вы можете «добавлять» другие катушки по одной, пробуя разные конфигурации и полярности, пока не определите не только, какие две катушки какие, но и каким образом их нужно подключить. Подумайте об этом, это просто, но несколько сложно. Поскольку нам все равно, в каком направлении крутится степпер, мы можем исключить множество возможностей и просто задать себе простой вопрос «а он крутится?».
Подключите его к драйверу шагового двигателя.
Чтобы шаговый двигатель просто двигался, полярность каждой катушки не имеет значения, и не имеет значения, какая катушка какая. Поэтому убедитесь, что каждая пара проводов для катушки находится вместе на одной стороне вилки (или на другой стороне для другой катушки), и подключите ее.
Двигатель движется в неправильном направлении
Чтобы заставить двигатель двигаться в правильном направлении, на самом деле имеет значение, какая катушка какая и какова полярность катушек.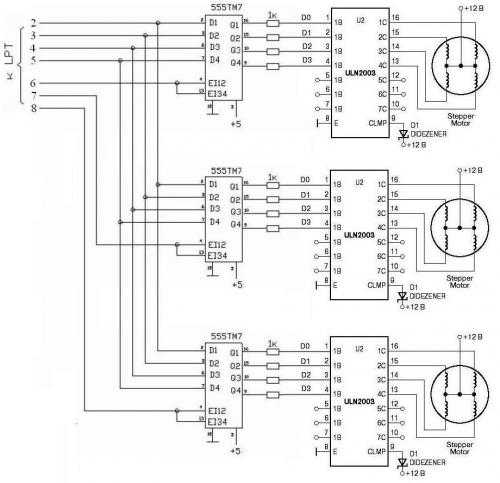 Однако, если они ошибаются, двигатель просто вращается не в ту сторону, это легко исправить, поменяв местами провода. Выберите один из следующих для изменения направления шагового двигателя:
Однако, если они ошибаются, двигатель просто вращается не в ту сторону, это легко исправить, поменяв местами провода. Выберите один из следующих для изменения направления шагового двигателя:
- Переключение полярности любой (одной) катушки, например изменение ABCD на BACD или ABCD на ABDC.
- Замена катушек, например замена ABCD на CDAB.
- Направление шага также может быть изменено в прошивке.
- Вставьте вилку наоборот (если это позволяют вилки вашей электроники). Это меняет местами катушки и меняет местами как катушку A, так и катушку B. Таким образом, эффект заключается в изменении направления 3 раза, что дает чистый эффект, такой же, как однократное изменение направления. Только немногие электроники позволяют это, потому что вы должны правильно считать не один раз, а каждый раз, когда вы подключаете степпер.
Дальнейшее чтение
- StepperMotor содержит список шаговых двигателей, которые, как известно, работают, список драйверов шаговых двигателей, которые, как известно, работают, и еще несколько советов.
- Контур управления двигателем определяет различные системы контура управления двигателем
- NEMA Motor описывает стандарты NEMA для шаговых двигателей, в частности, что означает «NEMA 17».
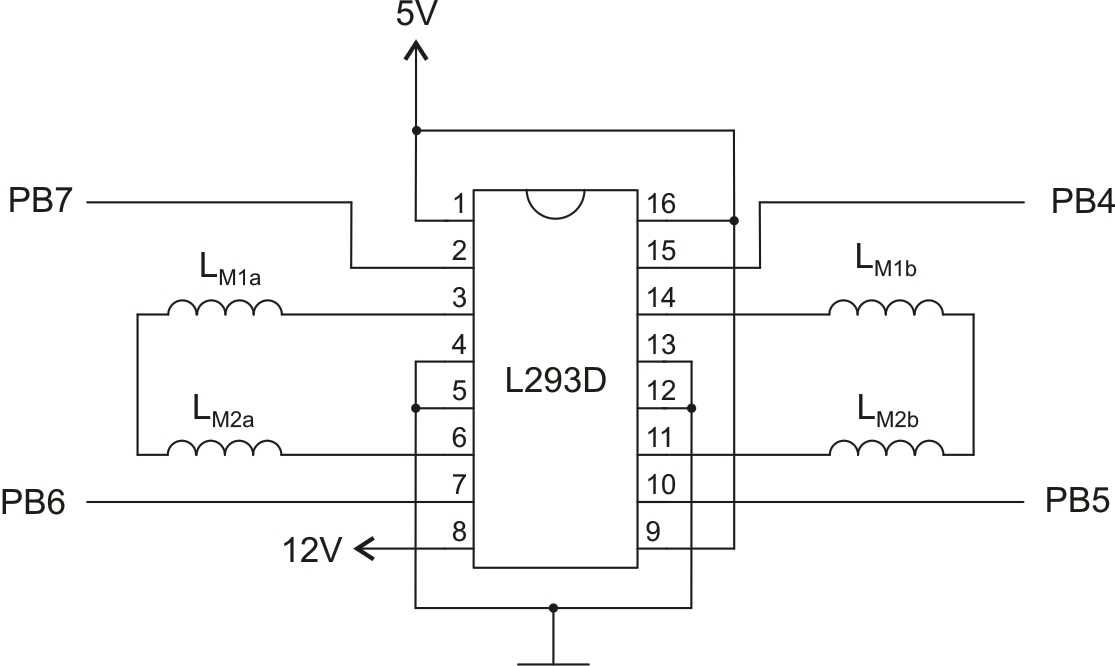
Цвет провода и пары катушек шагового двигателя
Дом
Дуэт Wi-Fi
Цвет провода шагового двигателя и пары катушек
Порядок подключения шагового двигателя и порядок цветов парных катушек
Цветовая маркировка проводов шагового двигателя
Чтобы правильно подключить любой шаговый двигатель, нам нужно определить, какие провода являются «парами» или подключены к концам каждой катушки. Обычно их называют катушкой «А» и катушкой «В». Точный порядок пар черных/зеленых или зеленых/черных булавок не имеет значения, но важно, чтобы пары были вместе слева, а красные/синие друг с другом справа.
Чтобы двигатель двигался правильно и в правильном направлении, шаговые двигатели должны быть правильно подключены. Имеет значение, какая катушка какая и какова полярность катушек.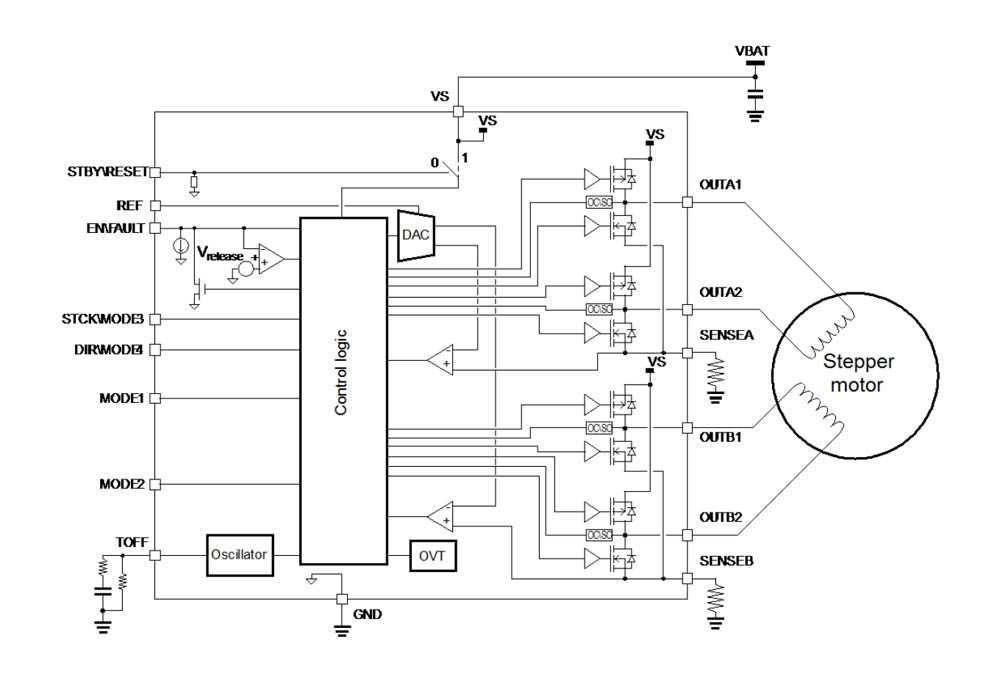 Хотя универсального стандарта для цветовой маркировки шаговых двигателей не существует, многие производители шаговых двигателей соблюдают порядок проводов шаговых двигателей с парами катушек двигателя
Хотя универсального стандарта для цветовой маркировки шаговых двигателей не существует, многие производители шаговых двигателей соблюдают порядок проводов шаговых двигателей с парами катушек двигателя
- Черный/зеленый — катушка двигателя
- Красный/синий — катушка двигателя
Хотя цветам проводов нельзя доверять, порядок проводов обычно следующий:
Опция проводки 1
- 1A — зеленый
- 1B — черный
- 2A — синий
- 2B — Красный
. + красный 0 90 провода «пары» или подключены к концам каждой катушки. Пары проводов двигателя известны как катушка «А» и катушка «В». Точный порядок пар не имеет значения. Важно только держать пары вместе Слева Справа Вот два способа соединения проводов шагового двигателя с фазами: Используйте мультиметр, чтобы правильно подобрать катушки и провода. Ом проверить шаговые двигатели. Пара проводов должна иметь небольшое сопротивление. Биполярные двигатели имеют две отдельные катушки: Красный/зеленый — одна катушка Синий/желтый — другая катушка. Используйте мультиметр, чтобы правильно подобрать катушки и провода. Ом проверить шаговые двигатели. Пара проводов должна иметь небольшое сопротивление. Как рассчитать сечение и длину провода для 3D-принтера? Большинство 3D-принтеров используют либо 12 В, либо… Продолжайте читать Шейна Хупера Продолжайте читать Шейна Хупера Шаговый двигатель какого размера следует использовать? В то время как размер шагового двигателя — это просто площадь, это… Продолжайте читать Шейна Хупера Как подключить материнскую плату Duet 3 6HC Duet 3 — отличная плата для вашего 3D-принтера, но… Продолжайте читать Шейна Хупера Хотя Duet 3 не заменит Duet 2 в ближайшее время, это гораздо более профессиональная электронная плата, которая… Продолжайте читать Шейна Хупера Конфигурация проводки и прошивки платы расширения DuetWifi Продолжайте читать Шейна Хупера С таким количеством доступных комплектов для 3D-принтеров и планов сборки с открытым исходным кодом может быть непросто выбрать… Продолжайте читать Шейна Хупера SolidCore CoreXY Выравнивание платформы по оси Z Недавно мы начали работу над системой выравнивания и крепления платформы для 3D-принтера SolidCore. Продолжайте читать Шейна Хупера Хотя эта статья еще не завершена, я продолжаю исследовать кинематический монтаж и математические расчеты… Продолжайте читать Шейн Хупер Объяснение кинематики CoreXY? Механическое устройство кинематики corexy включает в себя уникальное движение двигателя, при котором двигатель перемещается по осям X или Y… Продолжайте читать Шейна Хупера Продолжайте читать Шейна Хупера Модульный Продолжайте читать Шейна Хупера Спецификации профиля рамы Размер 2020 или 20 мм x 20 мм Тип Т-образный паз Спецификация рамы Список деталей Количество деталей Описание Источник Документация… Продолжайте читать Шейна Хупера Траектория инструмента CAD/CAM — это запрограммированная ЧПУ траектория, по которой инструмент удаляет металл с заготовки. Продолжайте читать Шейна Хупера Итак, вы ищете файлы для загрузки САПР… Что ж, E3D наконец выпустила файлы. Вы можете найти файлы… Продолжайте читать Шейна Хупера Система движения CoreXY — хорошее решение, если вы хотите печатать быстрее. Кинематика 3d принтера стала… Продолжайте читать Шейна Хупера В последнем обновлении конструкции используются три шаговых двигателя оси Z. При таком расположении ремень ведет к приводу шагового двигателя… Продолжайте читать Шейна Хупера Аддитивное производство или быстрое прототипирование AM продолжают совершенствовать производство 3D-печати и предлагают решения для производителей с приложениями в… Продолжайте читать Шейна Хупера Несмотря на то, что существует множество соглашений о 3D-печати и аддитивном производстве, нет ничего лучше, чем Rapid Event. Продолжайте читать Шейна Хупера Maker Faire — это интересное собрание создателей и творческих людей, которые любят учиться и любят делиться тем, что они… Продолжайте читать Шейна Хупера Midwest Reprap Festival 2019 был больше, чем годом ранее. Было так много людей, пришедших и выставивших свои работы. Площадка была битком набита самыми крутыми 3D-принтерами, которые вы когда-либо видели. Продолжайте читать Шейна Хупера Хотя эта страница будет использоваться для документирования и сбора ресурсов для реализации устройства смены инструмента на принтере SolidCore, мы… Продолжайте читать Шейна Хупера CoreXY Масштабируемость Масштабируемость принтера core-xy может быть проблемой, когда речь идет о проектировании и реализации аппаратного обеспечения. Продолжайте читать Шейна Хупера WorkHorse — это крупномасштабная машинная платформа для 3D-печати. Продолжайте читать Шейна Хупера Линейные рельсы лучше? Линейные рельсы обеспечивают высокую степень точности и стабильности по сравнению с круглыми стержнями с линейными… Продолжайте читать Шейна Хупера Цветовая маркировка проводов шагового двигателя Чтобы правильно подключить любой шаговый двигатель, нам нужно определить, какой… Продолжайте читать Шейна Хупера См. Магазин запчастей для 3D-принтеров Нравится Загрузка… 5 марта 2021 — 0 комментариев Шаговые двигатели 28-BYJ48 являются одними из наиболее часто используемых шаговых двигателей. Конфигурация выводов шагового двигателя 28-BYJ48 №: Название контакта Цвет провода Описание 1 Катушка 1 Оранжевый Этот двигатель имеет в общей сложности четыре катушки. Один конец всех катушек подключается к проводу +5 В (красный), а другой конец каждой катушки вытягивается как провода оранжевого, розового, желтого и синего цвета соответственно 2 Катушка 2 Розовый 3 Катушка 3 Желтый 4 Катушка 4 Синий 5 +5В Красный На этот провод нужно подать +5В, это напряжение появится на катушке, которая заземлена. 28BYJ-48 Шаговый двигатель Технические характеристики Примечание. Техническое описание шагового двигателя 28BYJ48 можно найти внизу страницы Другие шаговые двигатели Nema17 (1,6 кгсм), Nema17 (4,23 кгсм), Nema Иногда Опция
Кодовый кодовый и проводка двигателя не позволяет двигателю двигаться, игнорируйте цвета проводов и вместо этого смотрите на положение проводов.
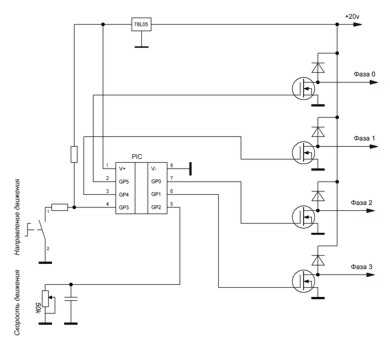 Используйте мультиметр, чтобы проверить, есть ли непрерывность в проводке шагового двигателя — оба двигателя вели себя одинаково: было нулевое сопротивление между синим и красным, нулевое сопротивление зеленым и черным.
Используйте мультиметр, чтобы проверить, есть ли непрерывность в проводке шагового двигателя — оба двигателя вели себя одинаково: было нулевое сопротивление между синим и красным, нулевое сопротивление зеленым и черным.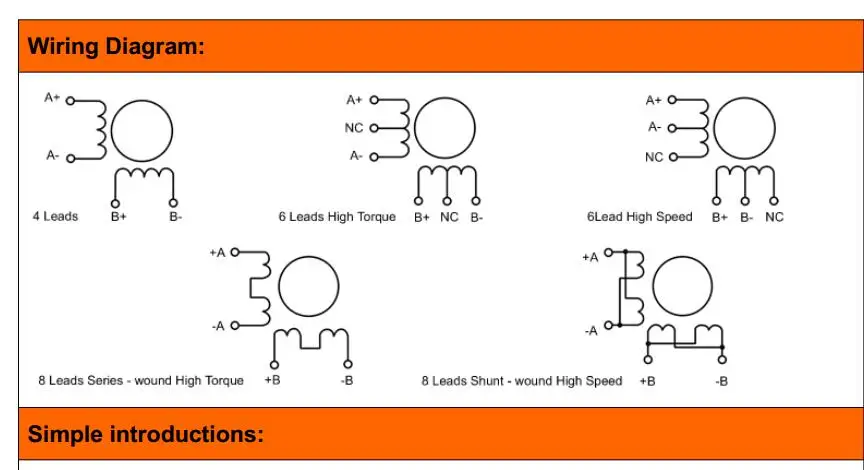 Если значения сопротивления правильные. Двигатели XYZ рассчитаны на 4,2 В, 1,5 А, 2,8 Ом +/-10%. Двигатель экструдера рассчитан на 2,6 В, 1 А, 2,6 Ом +/- 10%.
Если значения сопротивления правильные. Двигатели XYZ рассчитаны на 4,2 В, 1,5 А, 2,8 Ом +/-10%. Двигатель экструдера рассчитан на 2,6 В, 1 А, 2,6 Ом +/- 10%. Биполярные двигатели
 Если значения сопротивления правильные. Двигатели XYZ рассчитаны на 4,2 В, 1,5 А, 2,8 Ом +/-10%. Двигатель экструдера рассчитан на 2,6 В, 1 А, 2,6 Ом +/- 10%.
Если значения сопротивления правильные. Двигатели XYZ рассчитаны на 4,2 В, 1,5 А, 2,8 Ом +/-10%. Двигатель экструдера рассчитан на 2,6 В, 1 А, 2,6 Ом +/- 10%. В…
В…
Масштабируемый
Линейные направляющие
Сбалансированная каретка
Корпус
Спецификация использует большинство доступных деталей
Все металлические детали или напечатанные на 3D-принтере
Ось Z: независимая приводная или общая прокладка ремня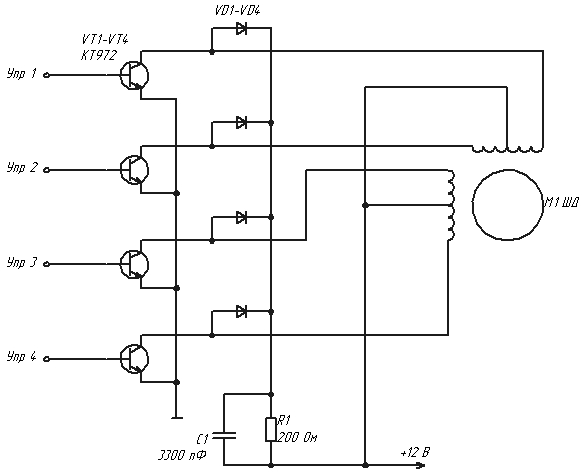 Там…
Там…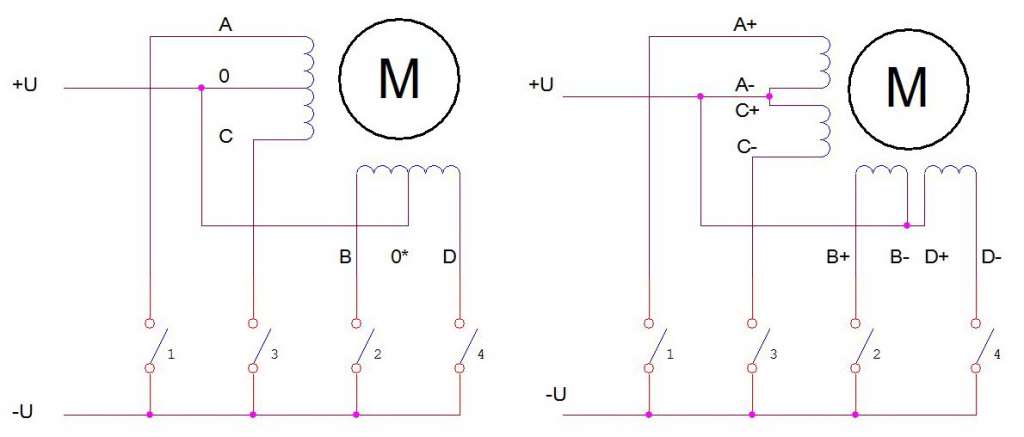 РАПИД +…
РАПИД +…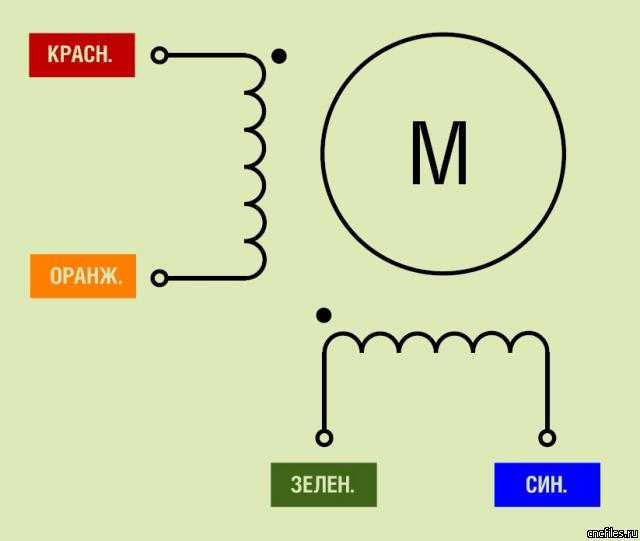 …
… Нравится:
28BYJ-48 Распиновка шагового двигателя Схема подключения, технические характеристики, руководство по использованию и техническое описание
 Вы можете найти этот или похожие двигатели в ваших DVD-приводах, камерах Motion и многих других подобных устройствах. Двигатель имеет униполярную схему с 4 катушками, и каждая катушка рассчитана на +5 В, поэтому им относительно легко управлять с помощью любых основных микроконтроллеров.
Вы можете найти этот или похожие двигатели в ваших DVD-приводах, камерах Motion и многих других подобных устройствах. Двигатель имеет униполярную схему с 4 катушками, и каждая катушка рассчитана на +5 В, поэтому им относительно легко управлять с помощью любых основных микроконтроллеров.
Другие двигатели
DC Motor, 12 В DC Motor, Servo Motor, BLDC Motor
, где можно использовать 28-byj48 Steepper Motor
. Камера движения и другие подобные приложения. Двигатель имеет униполярную схему с 4 катушками, и каждая катушка рассчитана на +5 В, поэтому им относительно легко управлять с помощью любых основных микроконтроллеров. Эти двигатели имеют угол шага 5,625 ° / 64, это означает, что двигатель должен будет сделать 64 шага, чтобы завершить один оборот, и на каждый шаг он будет покрывать 5,625 °, следовательно, уровень контроля также высок. Однако эти двигатели работают только от 5 В и, следовательно, не могут обеспечить высокий крутящий момент.0129 Двигатели Nema17 . Так что, если вы ищете компактный и простой в использовании шаговый двигатель с приличным крутящим моментом, то этот двигатель — правильный выбор для вас.
Эти двигатели имеют угол шага 5,625 ° / 64, это означает, что двигатель должен будет сделать 64 шага, чтобы завершить один оборот, и на каждый шаг он будет покрывать 5,625 °, следовательно, уровень контроля также высок. Однако эти двигатели работают только от 5 В и, следовательно, не могут обеспечить высокий крутящий момент.0129 Двигатели Nema17 . Так что, если вы ищете компактный и простой в использовании шаговый двигатель с приличным крутящим моментом, то этот двигатель — правильный выбор для вас.
Как использовать шаговый двигатель 28-BYJ48
Эти шаговые двигатели потребляют большой ток, поэтому драйвер IC, такой как ULN2003, является обязательным. Чтобы узнать, как заставить этот двигатель вращаться, мы должны посмотреть на схему катушки ниже.
Как мы видим, в двигателе четыре катушки и один конец всех катушек подключен к +5В (красный), а другие концы (оранжевый, розовый, желтый и синий) выведены как провода. На красный провод всегда подается постоянное напряжение +5 В, и эти +5 В будут подаваться на катушку (запитывать ее) только в том случае, если другой конец катушки заземлен. Шаговый двигатель можно заставить вращаться, только если катушки запитаны (заземлены) в логической последовательности. Эта логическая последовательность может быть запрограммирована с помощью микроконтроллера или путем разработки цифровой схемы. Последовательность, в которой должна срабатывать каждая катушка, показана в таблице ниже. Здесь «1» означает, что катушка находится под напряжением +5 В, так как оба конца катушки находятся под напряжением +5 В (красный и другой конец), катушка не будет под напряжением. Точно так же «0» означает, что катушка заземлена, теперь один конец будет + 5 В, а другой заземлен, поэтому катушка будет находиться под напряжением.
На красный провод всегда подается постоянное напряжение +5 В, и эти +5 В будут подаваться на катушку (запитывать ее) только в том случае, если другой конец катушки заземлен. Шаговый двигатель можно заставить вращаться, только если катушки запитаны (заземлены) в логической последовательности. Эта логическая последовательность может быть запрограммирована с помощью микроконтроллера или путем разработки цифровой схемы. Последовательность, в которой должна срабатывать каждая катушка, показана в таблице ниже. Здесь «1» означает, что катушка находится под напряжением +5 В, так как оба конца катушки находятся под напряжением +5 В (красный и другой конец), катушка не будет под напряжением. Точно так же «0» означает, что катушка заземлена, теперь один конец будет + 5 В, а другой заземлен, поэтому катушка будет находиться под напряжением.
Цвет провода двигателя | Последовательность вращения по часовой стрелке | |||||||
Этап 1 | Этап 2 | Этап 3 | Этап 4 | Этап 5 | Этап 6 | Этап 7 | Ступень 8 | |
Оранжевый | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 0 |
Желтый | 1 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
Розовый | 1 | 1 | 1 | 0 | 0 | 0 | 1 | 1 |
Синий | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 |
Красный | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
Применение шаговых двигателей
- Станки с ЧПУ
- Машины точного контроля
- Камеры видеонаблюдения
- DVD-плееры
- Наклон бокового зеркала автомобиля
28BYJ-48 Размеры
Метки
Шаговый двигатель
Подключение шагового двигателя.
 Как определить пары проводки катушки двигателя
Как определить пары проводки катушки двигателя
Подключение шагового двигателя. Как определить пары проводки катушки двигателя
Мы заметили, что на многих форумах, в группах facebook и других, где собирается большое количество начинающих любителей DIY, очень часто обсуждается тема шаговых двигателей, использования и настройки.
На нашем YouTube-канале было много вопросов о проблемах с шаговым двигателем. Самая распространенная проблема — как подключить шаговый двигатель. Эта веха для многих людей мешает им продолжать работу над проектом.
При неправильном подключении проводов обычно наблюдается один или несколько из следующих симптомов:
- Шаговый двигатель работает случайным образом в неправильном направлении (вперед и назад).
- Иногда он движется в определенном направлении, а иногда нет.
- Двигатель вибрирует в одном месте.
- Двигатель трясется и дергается.
- Нет крутящего момента.
- Двигатель гудит громко и определенно не так, как мы ожидаем — он мягко гудит.
В этом случае у вас есть несколько вариантов:
- Проверьте, правильно ли вы определили пары катушек.
- Проверьте, все ли кабели в рабочем состоянии (они не оборваны и правильно подключены к винтовым клеммам).
- Проверить работу контроллера.
Посмотрите наш специальный видеоурок
Пошаговое подключение шагового двигателя.
ИДЕНТИФИКАЦИЯ КАБЕЛЯ ПРОВОДКИ КАТУШКИ ШАГОВОГО ДВИГАТЕЛЯ
Шаговый двигатель представляет собой тип бесщеточного двигателя.
Этот двигатель состоит из ротора с магнитом и двух стабильных катушек внутри корпуса (в этой статье мы используем биполярный двигатель — 4 провода).
Представьте катушки внутри двигателя.
Это выглядит примерно так, как показано на упрощенном рисунке ниже.
Провода, выходящие из двигателя, помечены желтым, зеленым, красным и синим цветом (чаще всего мы имеем дело с этим цветом). Катушки — это те провода, которые скручены (коричневые).
Драйверы шаговых двигателей управляют двигателем, переключая питание на эти две катушки.
Для правильной работы двигателя провода двигателя должны быть подключены к соответствующим выходам контроллера. Бывает, что производитель двигателя меняет цвета кабелей или подключает их иначе, как на схеме, которую можно найти на сайте производителя. В такой ситуации мы должны сами определить пары подходящих проводов. Существует несколько методик определения проводов, но проще всего использовать мультиметр.
ИДЕНТИФИКАЦИЯ ШАГОВОГО ДВИГАТЕЛЯ С ПОМОЩЬЮ МУЛЬТИМЕТРА
Сначала установите мультиметр в положение проверки диодов (как показано на рисунке ниже). Чтобы проверить, правильно ли работает ваш мультиметр, соедините щупы мультиметра вместе. Если все работает правильно, мультиметр должен издать звуковой сигнал. Когда щупы отсоединены, мультиметр должен показывать на дисплее «1».
Итак, приступим к тестированию нашего шагового двигателя.
- Выберите случайный провод шагового двигателя и коснитесь его черным/отрицательным щупом на мультиметре.
- Выберите один из трех других проводов и коснитесь его красным/плюсовым щупом мультиметра. У вас есть 33% шанс найти пару данной катушки с первой попытки :). Однако давайте предположим, что вы это пропустили — см. рисунок ниже, на котором мы представили нашу первую неудачную попытку.
- Проверьте другой провод.
Держите черный щуп с первым выбранным кабелем с самого начала и используйте красный щуп, чтобы коснуться другого провода.
Как видно на графике ниже, если мы снова пропустили нужный провод с красным щупом, мультиметр не издаст ни звука, а на дисплее все равно будет отображаться цифра «1».
- Если снова не получилось, подсоедините красный щуп к последнему проводу, который мы еще не выбрали, и здесь состояние мультиметра должно измениться. Мультиметр может издать негромкий писк, а на дисплее вместо цифровой единицы появится другая цифра.
Этот номер не имеет большого значения, важно то, что он считывает небольшое значение.
Значит именно эти два провода составляют пару катушек.
Отделите их от остальных и подключите к разъемам драйвера шагового двигателя A+/A-
- Теперь проверьте, образуют ли пару другие два провода — прикоснитесь к одному из них черным щупом, а к другому один с красным щупом.
Если провода образуют пару, мультиметр снова изменит цифру 1 на дисплее на другую цифру/цифру и дополнительно может издать негромкий писк.
Предполагая, что все в порядке, вы можете подключить эту пару проводов к клеммам B + и B- контроллера.
Однако, если мультиметр не меняет своего состояния, это может означать, что у вас поврежден мультиметр или поврежден двигатель (например, оборваны провода от катушки катушки).
В этом случае, чтобы быть абсолютно уверенным, что что-то сломалось и вы все сделали правильно, повторите процедуру.
КАК ПРОВЕРИТЬ КАБЕЛИ ШАГОВОГО ДВИГАТЕЛЯ БЕЗ ИНСТРУМЕНТОВ?
Метод с мультиметром самый лучший, но мы понимаем, что не у всех есть мультиметр. Что делать, если у нас дома нет мультиметра?
Как проверить пары проводов без дополнительных инструментов?
Здесь мы представим вам еще один «ручной» метод, но мы должны отметить, что он не всегда должен работать.
Скрутите два случайных провода.
Начните с соединения двух случайных проводов двигателя вместе — вы можете просто коснуться их вместе или скрутить. (см. рисунок ниже).
Если соединенные между собой провода относятся к одной катушке, они будут «создавать» магнитное поле в двигателе при попытке вручную провернуть вал.
Это будет ощущаться по повышенному сопротивлению вращению вала, или вы можете ощущать легкое подпрыгивание.