Содержание
Kак осуществляется пуск двигателя постоянного тока?
Схемы подключения электродвигателя постоянного тока
В зависимости от требуемых выходных характеристик электродвигателя постоянного тока, его подключение может быть осуществлено по одной из принципиальных схем: подключение с независимым, последовательным, параллельным или смешанным типом возбуждения. Схематическое изображение типов подключения электродвигателя постоянного тока представлено на иллюстрации, при этом каждый из типов подключения привносит свои особенности в эксплуатацию механизма.
Подключение с независимым возбуждением
При использовании такой схемы подключения обмотка возбуждения подключается напрямую к независимому источнику. При использовании такой схемы подключения общие характеристики электродвигателя станут идентичны двигателю, работающему на постоянных магнитах. Регулировка скорости вращения осуществляется с помощью сопротивления, возникающего в якорной цепи, или же при помощи реостата – регулировочного сопротивления в цепи обмотки возбуждения. При этом следует отметить, что при регулировке реостатом важно следить за величиной сопротивления в цепи обмотки: при сильном уменьшении этого значения (а также при обрыве) токи якоря резко возрастают, достигая опасных величин. При использовании для подключения схемы независимого возбуждения запрещается запуск электродвигателя на холостом ходу или при дефиците валовой нагрузки: такие действие неминуемо приведут к резкому увеличению скорости вращения и повреждению механизма.
При этом следует отметить, что при регулировке реостатом важно следить за величиной сопротивления в цепи обмотки: при сильном уменьшении этого значения (а также при обрыве) токи якоря резко возрастают, достигая опасных величин. При использовании для подключения схемы независимого возбуждения запрещается запуск электродвигателя на холостом ходу или при дефиците валовой нагрузки: такие действие неминуемо приведут к резкому увеличению скорости вращения и повреждению механизма.
Подключение с параллельным возбуждением
При использовании такого типа подключения подключение обмоток ротора и возбуждение происходит параллельно, к единому источнику питания. Таким образом, при включении электродвигателя в сеть на ротор подаётся большее количество тока, чем на обмотку возбуждения, благодаря чему выходные характеристики параллельно подключённого двигателя постоянного тока позволяют использовать их в приводах станков и прочего промышленного оборудования. Скорость вращения регулируется реостатами в цепи ротора.
Подключение с последовательным возбуждением
При использовании такого типа подключения якорная обмотка и обмотка возбуждения используют один ток, а их включение осуществляется попеременно. Скорость и нагрузка в двигателе постоянного тока, подключённом по последовательной схеме, прямо пропорциональны друг другу. Запуск на холостом ходу запрещён. Благодаря хорошим пусковым характеристикам, обеспечиваемым подключением с последовательным возбуждением, двигатели постоянного тока, подключённые по такой схеме, широко применяются в электротранспорте.
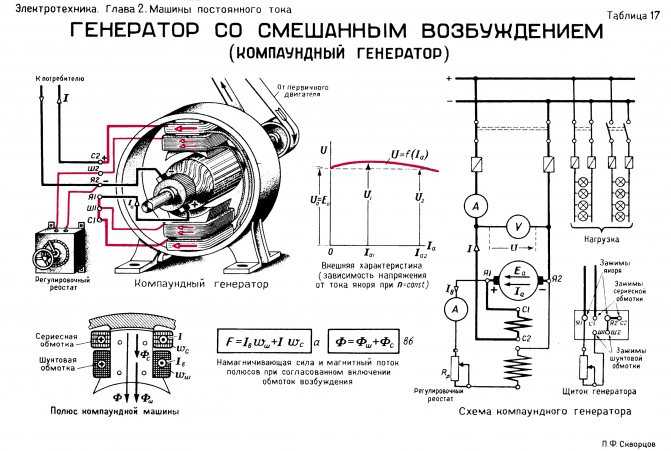
Подключение со смешанным возбуждением
Применение схемы смешанного возбуждения при подключении электродвигателя постоянного тока используются две попарно расположенные на полюсах двигателя обмотки возбуждения. Здесь существуют два варианта подключения: потоки будут либо складываться, либо вычитаться. В первом случае особенности работы электродвигателя будут аналогичны подключению по схеме последовательного возбуждения, во втором – параллельного.
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему. Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
Частота вращения – одна из важнейших его характеристик. Ее регулировать можно тремя способами: изменяя поток возбуждения, изменяя величину подводимого напряжения к двигателю, изменяя сопротивление в якорной цепи.
Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.
Такое регулирование применяют во всех промышленных электроприводах.
Пуск двигателя постоянного тока. Пусковые характеристики
В соответствии с уравнением равновесия моментов Mэм = M0 + Mн + J(dω/dt)
условием пуска двигателя является неравенство Мп >Мст. Если это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. Ввиду того, что ротор обладает моментом инерции, разгоняется он не мгновенно – нарастание скорости происходит по закону, близкому к экспоненте. Пуск двигателя постоянного тока осложняется тем, что при ω=0 ЭДС Eя=0 и пусковой ток якоря Iяп= Uя/ Rя может в 10 – 20 раз превышать номинальный ток, что опасно как для двигателя (усиление искрения, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока Kiп= Iп/ Iном и кратность пускового момента Кмп= Мп/ Мном. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока. Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiп применяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится.
Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiп применяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится.
№23. Законы электромеханики
Первый Закон
Электромеханическое преобразование энергии не может осуществляться с коэффициентом полезного действия 100%.
Электромеханические преобразователи – сложные преобразователи, в которых преобразование электрической энергии (Рэл) в механическую ( Рмех) и обратно происходит с обязательным выделением тепловой энергии ( Рт). В каждой машине имеются потери в стали, обмотках, механические потери. По этой причине КПД всегда меньше 100%. Для электрической машины КПД можно определить как отношение полезной мощности к мощности, подводимой к электрической машине.
В каждой машине имеются потери в стали, обмотках, механические потери. По этой причине КПД всегда меньше 100%. Для электрической машины КПД можно определить как отношение полезной мощности к мощности, подводимой к электрической машине.
Для генератора
Для двигателя
Второй закон
Все электрические машины обратимы, ᴛ.ᴇ. одна и та же машина может работать в режимах двигателя и генератора. Обратимость электрической машины – основное отличие электромеханического преобразователя (ЭП) от других преобразователей.
Работа в режимах двигателя и генератора – важнейшее преимущество ЭП, обеспечившее широкое применение электрических машин в промышленности.
В режиме генератора активная мощность забирается с вала машины и преобразуется в электрическую, в режиме двигателя – поступает из сети и преобразуется в механическую. При этом реактивная мощность, идущая на создание магнитного поля, может ʼʼпоступатьʼʼ или ʼʼотдаватьсяʼʼ в сеть независимо от режима работы ЭП.
В трансформаторах энергия магнитного поля концентрируется, в основном, в магнитопроводе, а в генераторах и двигателях – в воздушном зазоре – пространстве между ротором и статором. Можно утверждать, что там и происходит электромеханическое преобразование энергии.
Третий закон
Электромеханическое преобразование энергии осуществляется полями, неподвижными относительно друг друга. Результирующее поле в машине создается полями статора и ротора.
Ротор может вращаться с той же скоростью, что и поле, или с другой скоростью, однако поля ротора и статора в установившемся режиме неподвижны относительно друг друга.
Угловая скорость ротора
Угловая скорость поля ротора относительно ротора , угловая скорость поля ротора относительно неподвижного статора , где — угловая скорость поля статора, — угловая скорость ротора.
Электромагнитный момент , где Рэ – электромагнитная мощность или мощность, сконцентрированная в магнитном поле в воздушном зазоре машины.
Поля, перемещающиеся относительно друг друга, не создают электромагнитного момента͵ а создают только поток тепловой энергии.
№24
Шаг 1-й: Узнать характеристики нагрузки.
Применительно к однофазным электродвигателям, нагрузки разделяются на 3 категории: стабильный момент силы, внезапно изменяющийся момент силы и момент силы, который изменяется постепенно, через определённые промежутки времени.
Шаг 2-й. Рассмотрим мощность.
Главное правило выбора мотора по мощности: нужно выбирать электродвигатель именно той мощности, какой нужно и стараться избегать её превышения или занижения.
Шаг 3-й. Запуск.
Также необходимо учитывать силу инерции, особенно вовремя процедуры пуска.
Шаг 4: Регулировка в течение цикла работы.
Циклом работы называется совокупность пошаговых операций, выполняемых мотором, в которые входят старт, работа в обычном режиме и остановка.
Шаг 5-й: Последний критерий выбора мотора, гипоксия.
Прямой пуск
Из всех электродвигателей постоянного тока основная градация при выборе способа их запуска должна учитывать мощность устройства.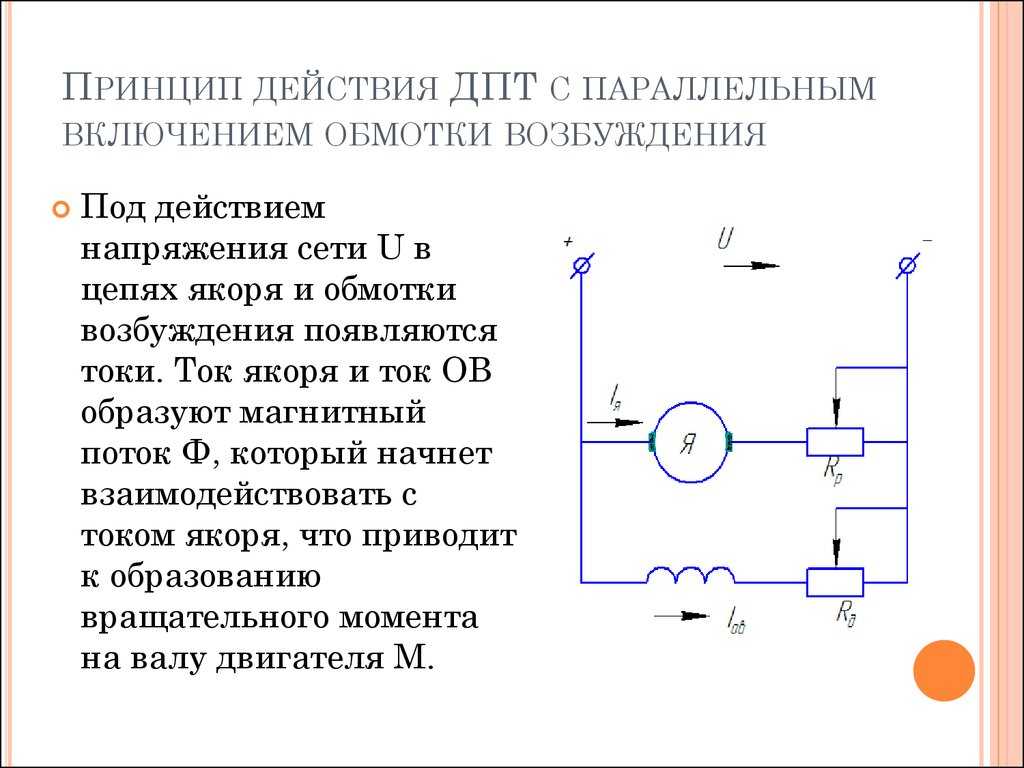
В целом выделяют три вида пуска:
- малой мощности;
- средней;
- большой мощности.
Для прямого запуска подойдут только маломощные электродвигатели, которые потребляют до 1кВт электроэнергии в сети. При прямых запусках электродвигателя все напряжение сразу подается на рабочую обмотку. Это обуславливает возникновение максимального пускового тока из-за отсутствия естественной компенсации за счет ЭДС противодействия.
С физической точки зрения ситуация в обмотках ротора будет выглядеть следующим образом: в момент подачи напряжения сила тока в обмотках равна нулю, поэтому его значение будет определяться по формуле:
I = U/Rобм, где
U – приложенная к выводам номинальное напряжение, Rобм – сопротивление катушки.
В этот момент величина токовой нагрузки электродвигателя постоянного тока является максимальной, он может отличаться от номинального значения в 1,5 – 2,5 раза. После этого протекание тока обуславливает генерацию ЭДС противодействия, которая компенсирует пусковую нагрузку до установки номинальной мощности, тогда ток станет:
I = (U — Eпрот)/Rобм
В мощных устройствах сопротивление обмоток якоря может равняться 1 или 0,5 Ом, из-за чего ток при запуске электродвигателя может достигнуть 200 – 500 А, что в 10 – 50 раз будет превышать допустимые величины. Это, в свою очередь, может привести к термическому отпуску металла, деформации проводников, разрушению колец или щеток скользящего контакта. Поэтому двигатели постоянного тока средней и большой мощности должны вводиться в работу реостатным запуском или путем подачи заведомо пониженного напряжения, прямой пуск для них крайне опасен.
Это, в свою очередь, может привести к термическому отпуску металла, деформации проводников, разрушению колец или щеток скользящего контакта. Поэтому двигатели постоянного тока средней и большой мощности должны вводиться в работу реостатным запуском или путем подачи заведомо пониженного напряжения, прямой пуск для них крайне опасен.
Схема подключения электродвигателя постоянного тока
Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
Торможение электрического двигателя постоянного тока
Для торможения электроприводов с ДПТ также есть три варианта: торможение противовключением, динамическое и рекуперативное. Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла. Это торможение сопровождается мгновенной остановкой двигателя.
Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла. Это торможение сопровождается мгновенной остановкой двигателя.
Последнее происходит, если электрический мотор, включенный в сеть, вращается со скоростью, которая выше скорости холостого хода. ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т.е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
Применение двух пускателей в реверсивном устройстве
Схема управления асинхронным двигателем такого типа, по сути, работает таким же образом, как и предыдущая. Основное отличие здесь заключается в том, что появляется возможность при необходимости изменять направление вращения ротора. Чтобы это осуществить, необходимо изменить работающие фазы, имеющиеся на обмотке статора. К примеру, если нажать на кнопку «Пуск» КМ1, то порядок рабочих фаз будет А-В-С. Если же включить устройство со второй кнопки, то есть с КМ2, то порядок работающих фаз сменится на противоположный, то есть С-В-А.
Чтобы это осуществить, необходимо изменить работающие фазы, имеющиеся на обмотке статора. К примеру, если нажать на кнопку «Пуск» КМ1, то порядок рабочих фаз будет А-В-С. Если же включить устройство со второй кнопки, то есть с КМ2, то порядок работающих фаз сменится на противоположный, то есть С-В-А.
Таким образом получается, что для управления асинхронным двигателем схемой такого типа необходимо две кнопки «Пуск», одна кнопа «Стоп» и два пускателя.
При нажатии на первую кнопку, которая в схеме обычно обозначается как SB2, произойдет включение первого контактора и вращение ротора в одну из сторон. Если возникает необходимость смены направления вращения на противоположную, необходимо нажать на «Стоп», после чего запуск двигателя осуществляется кнопкой SB3 и включением в работу второго контактора. Другими словами, чтобы использовать данную схему, необходимо промежуточное нажатие на кнопку остановки.
Так как управление работой двигателя с такой схемой усложняется, возникает необходимость в дополнительной защите. В данном случае речь идет об эксплуатации в пускателе нормально-закрытых (размыкающих) контактов. Они необходимы для того, чтобы обеспечить защиту от одновременного нажатия на обе кнопки «Пуск». Их нажатие без остановки приведет к возникновению короткого замыкания. Дополнительные контакты в таком случае препятствуют одновременному включению обоих пускателей. Это происходит из-за того, что при одновременном нажатии один из них включится на секунду позже второго. За это время первый контактор успеет разомкнуть свои контакты.
В данном случае речь идет об эксплуатации в пускателе нормально-закрытых (размыкающих) контактов. Они необходимы для того, чтобы обеспечить защиту от одновременного нажатия на обе кнопки «Пуск». Их нажатие без остановки приведет к возникновению короткого замыкания. Дополнительные контакты в таком случае препятствуют одновременному включению обоих пускателей. Это происходит из-за того, что при одновременном нажатии один из них включится на секунду позже второго. За это время первый контактор успеет разомкнуть свои контакты.
Советуем изучить — Краткий конспект на тему «припои и флюсы, применяемые при пайке»
Недостаток управления электрическим двигателем с такой схемой заключается в том, что пускатели должны обладать большим количеством контактов или же контактными приставками. Любой из этих двух вариантов не только усложняет всю электрическую конструкцию, но еще и удорожает ее сборку.
Сфера применения
Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения. С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.
Самый простой щёточно-коллекторный узел
Схемы управления электроприводами
Cхема электропривода холодильной фреоновой установки На рис.
В случае, если одна из электрифицированных задвижек окажется неисправной, промежуточное реле PIT разрывает цепи автоматического управления насосными агрегатами гидроэлеваторов.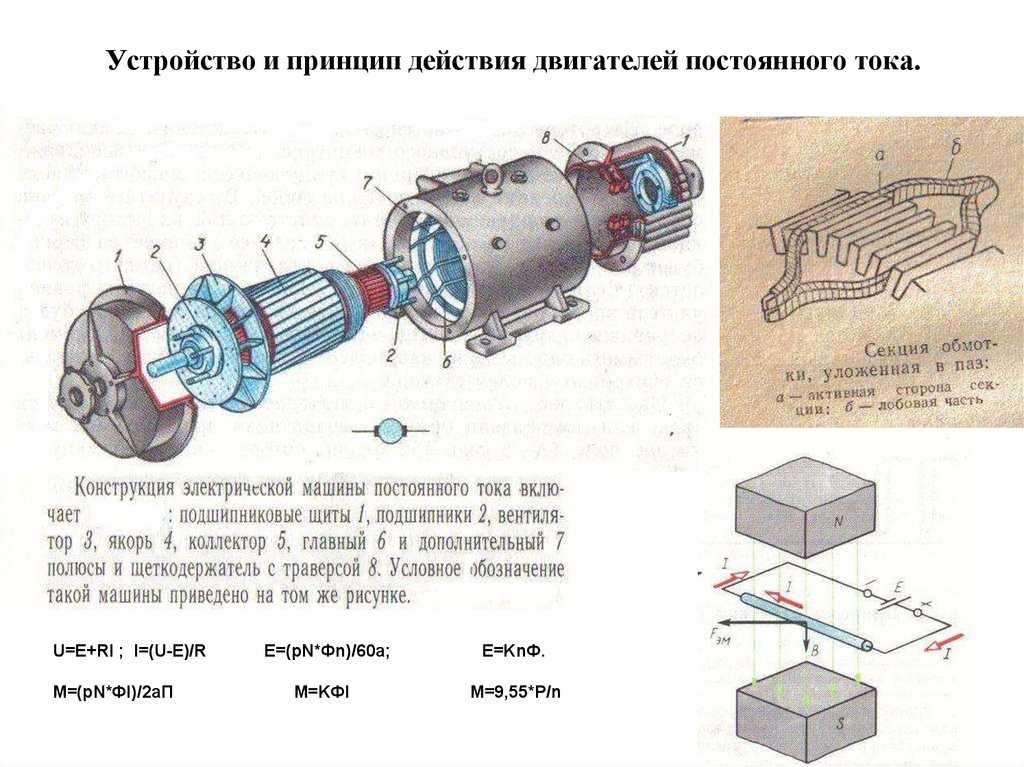
Для подключения к сети с одной фазой необходимо наличие переходного конденсатора, но в этом случае будут потери мощности и скорости оборотов двигателя. На выходе логической схемы включены командные реле, которые подают команды в схему управления электроприводами механизмов автоматического штабелера. В конце торможения, когда частота вращения будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2.
Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления. Двигатель получает пониженное напряжение. При этом отключается и выключатель М2. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции.
См. также: Электролаборатория регистрация
Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков. После запуска двигателя M1 должны установиться нормальные параметры рассола и охлаждающей воды, о чем сигнализируют контакты: ДТР датчик температуры рассола ; РР реле расхода рассола ; РД реле давления, размыкает свой контакт в том случае, если давление в магистрали слишком понизится или повысится. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Если температура в помещениях поднимается выше установленной, замыкается контакт ДОТ, срабатывает реле Р2 и происходит пуск компрессора.
После запуска двигателя M1 должны установиться нормальные параметры рассола и охлаждающей воды, о чем сигнализируют контакты: ДТР датчик температуры рассола ; РР реле расхода рассола ; РД реле давления, размыкает свой контакт в том случае, если давление в магистрали слишком понизится или повысится. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Если температура в помещениях поднимается выше установленной, замыкается контакт ДОТ, срабатывает реле Р2 и происходит пуск компрессора.
Советуем изучить — Сто 70238424.27.100.059-2009 ветроэлектростанции (вэс). условия создания. нормы и требования
При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления.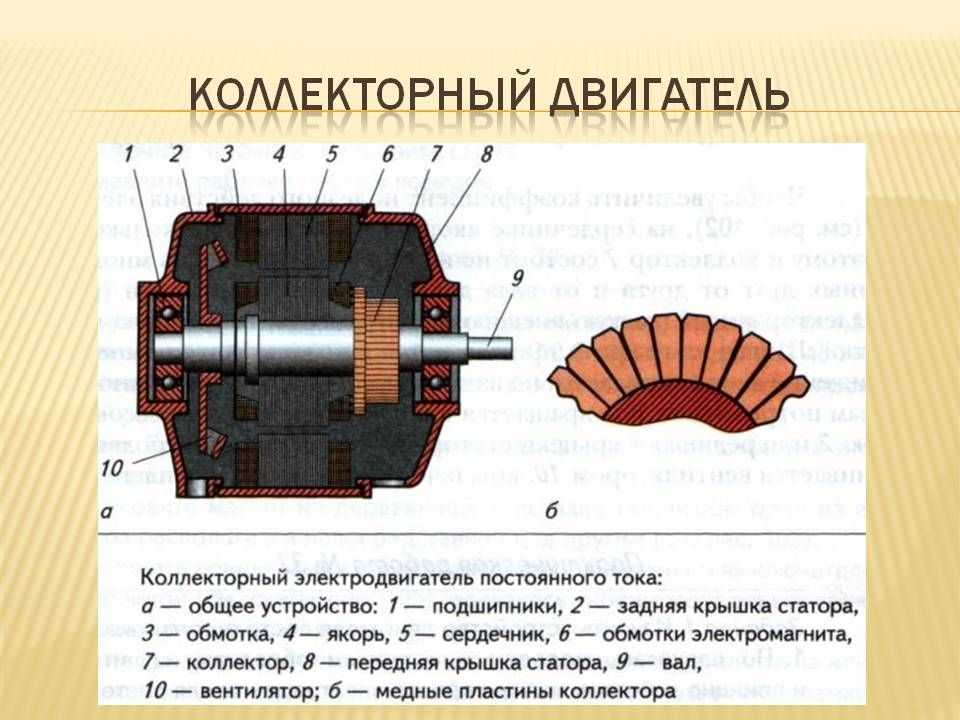 Нажатие кнопки SВ2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Пуск начинается после перемещения контактной щетки на вывод 1.
Нажатие кнопки SВ2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Пуск начинается после перемещения контактной щетки на вывод 1.
Также рекомендуем прочесть
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. Это позволяет снизить расход электроэнергии и износ мотора, предотвращает перегрев и дает ряд дополнительных возможностей для подключения автоматики.
Одновременно НО контакт реле РП сигнализирует на диспетчерский пункт. Для его ускорения ванну печи поворачивают относительно оси на 40 влево и вправо и в каждом из крайних положений производят проплавле-ние новых колодцев, что в конечном итоге приводит к обвалу шихты в печи и ускорению наиболее тяжелого с энергетической точки зрения режима расплавления шихты.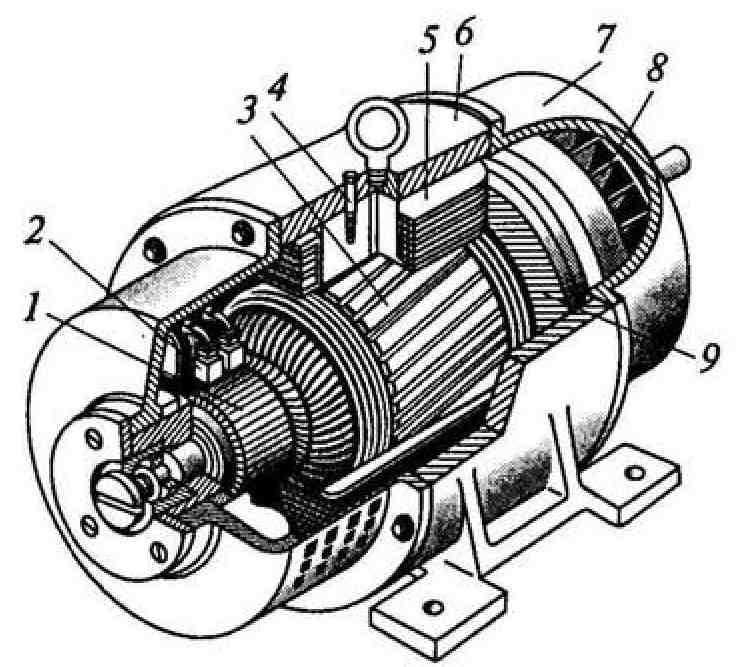 При нажатии на кнопку первым отключается размыкающий контакт, а затем включается замыкающий. В этом случае он подключается от двух любых фаз, например, от А и B. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения. Как читать Элекрические схемы
При нажатии на кнопку первым отключается размыкающий контакт, а затем включается замыкающий. В этом случае он подключается от двух любых фаз, например, от А и B. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения. Как читать Элекрические схемы
Подключение электродвигателя постоянного тока
Несмотря на то, что электродвигатели постоянного тока не так популярны, как устройства, работающие на переменном токе, сфера их применения довольно широка: они используются в быту, в качестве элементов различного наземного транспорта, а также на предприятиях в приводах элементов, бесперебойное электроснабжение которых осуществляется аккумуляторными батареями. Именно поэтому на сайте торгового дома Степмотор представлен широкий ассортимент устройств такого типа. Отличительной особенностью электродвигателей постоянного тока является наличие обмоток возбуждения, при этом от того, каким образом они будут подключены к сети, напрямую зависят пусковые характеристики, механические и электрические свойства двигателя.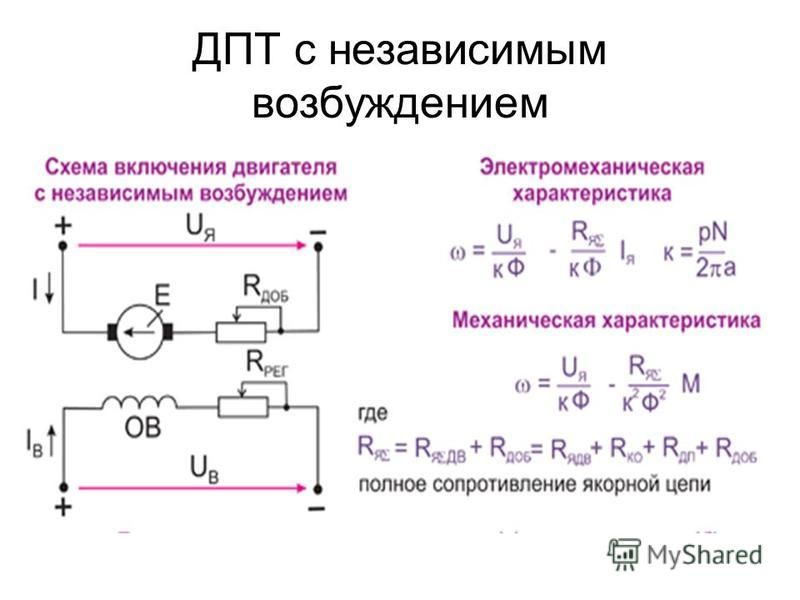
Кнопочный пост
Данное оборудование предназначается для коммутации, то есть соединения цепей, в которых протекает переменный ток с максимальным напряжением в 660 В и частотой 50 или 60 Гц. Можно эксплуатировать такие устройства и в сетях с постоянным током, но тогда максимальное рабочее напряжение ограничивается 440 В. Возможно применение даже в качестве пульта управления.
Советуем изучить — Наведенное напряжение
Обычный кнопочный пост имеет следующие особенности своей конструкции:
- Каждая из его кнопок лишена фиксации.
- Имеется кнопка «Пуск», которая чаще всего имеет не только зеленый цвет, но и контакты нормально-разведенного типа. Некоторые модели даже обладают подсветкой, которая включается после нажатия. Предназначение — введение в работу какого-либо механизма.
- «Стоп» — это кнопка, обладающая красным цветом (чаще всего). Располагается она на замкнутых контактах, а ее основное предназначение — это отключение какого-либо прибора от источника питания с целью остановки его работы.

- Отличие между некоторыми приборами состоит в материале, который используется для изготовления каркаса. Он может быть сделан из металла или пластмассы. В данном случае корпус играет важную роль, так как имеет определенную степень защиты, зависящую от материала.

Как подключить постоянный двигатель в 220
Подключение электродвигателя постоянного тока
Несмотря на то, что электродвигатели постоянного тока не так популярны, как устройства, работающие на переменном токе, сфера их применения довольно широка: они используются в быту, в качестве элементов различного наземного транспорта, а также на предприятиях в приводах элементов, бесперебойное электроснабжение которых осуществляется аккумуляторными батареями. Именно поэтому на сайте торгового дома Степмотор представлен широкий ассортимент устройств такого типа. Отличительной особенностью электродвигателей постоянного тока является наличие обмоток возбуждения, при этом от того, каким образом они будут подключены к сети, напрямую зависят пусковые характеристики, механические и электрические свойства двигателя.
Прямой пуск
Из всех электродвигателей постоянного тока основная градация при выборе способа их запуска должна учитывать мощность устройства.
В целом выделяют три вида пуска:
- малой мощности;
- средней;
- большой мощности.
Для прямого запуска подойдут только маломощные электродвигатели, которые потребляют до 1кВт электроэнергии в сети. При прямых запусках электродвигателя все напряжение сразу подается на рабочую обмотку. Это обуславливает возникновение максимального пускового тока из-за отсутствия естественной компенсации за счет ЭДС противодействия.
С физической точки зрения ситуация в обмотках ротора будет выглядеть следующим образом: в момент подачи напряжения сила тока в обмотках равна нулю, поэтому его значение будет определяться по формуле:
 youtube.com/embed/XamfUIu4wDI?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/XamfUIu4wDI?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
Схемы подключения электродвигателя постоянного тока
В зависимости от требуемых выходных характеристик электродвигателя постоянного тока, его подключение может быть осуществлено по одной из принципиальных схем: подключение с независимым, последовательным, параллельным или смешанным типом возбуждения. Схематическое изображение типов подключения электродвигателя постоянного тока представлено на иллюстрации, при этом каждый из типов подключения привносит свои особенности в эксплуатацию механизма.
Подключение с независимым возбуждением
При использовании такой схемы подключения обмотка возбуждения подключается напрямую к независимому источнику. При использовании такой схемы подключения общие характеристики электродвигателя станут идентичны двигателю, работающему на постоянных магнитах. Регулировка скорости вращения осуществляется с помощью сопротивления, возникающего в якорной цепи, или же при помощи реостата – регулировочного сопротивления в цепи обмотки возбуждения. При этом следует отметить, что при регулировке реостатом важно следить за величиной сопротивления в цепи обмотки: при сильном уменьшении этого значения (а также при обрыве) токи якоря резко возрастают, достигая опасных величин. При использовании для подключения схемы независимого возбуждения запрещается запуск электродвигателя на холостом ходу или при дефиците валовой нагрузки: такие действие неминуемо приведут к резкому увеличению скорости вращения и повреждению механизма.
При этом следует отметить, что при регулировке реостатом важно следить за величиной сопротивления в цепи обмотки: при сильном уменьшении этого значения (а также при обрыве) токи якоря резко возрастают, достигая опасных величин. При использовании для подключения схемы независимого возбуждения запрещается запуск электродвигателя на холостом ходу или при дефиците валовой нагрузки: такие действие неминуемо приведут к резкому увеличению скорости вращения и повреждению механизма.
Подключение с параллельным возбуждением
При использовании такого типа подключения подключение обмоток ротора и возбуждение происходит параллельно, к единому источнику питания. Таким образом, при включении электродвигателя в сеть на ротор подаётся большее количество тока, чем на обмотку возбуждения, благодаря чему выходные характеристики параллельно подключённого двигателя постоянного тока позволяют использовать их в приводах станков и прочего промышленного оборудования. Скорость вращения регулируется реостатами в цепи ротора.
Подключение с последовательным возбуждением
При использовании такого типа подключения якорная обмотка и обмотка возбуждения используют один ток, а их включение осуществляется попеременно. Скорость и нагрузка в двигателе постоянного тока, подключённом по последовательной схеме, прямо пропорциональны друг другу. Запуск на холостом ходу запрещён. Благодаря хорошим пусковым характеристикам, обеспечиваемым подключением с последовательным возбуждением, двигатели постоянного тока, подключённые по такой схеме, широко применяются в электротранспорте.
Подключение со смешанным возбуждением
Применение схемы смешанного возбуждения при подключении электродвигателя постоянного тока используются две попарно расположенные на полюсах двигателя обмотки возбуждения. Здесь существуют два варианта подключения: потоки будут либо складываться, либо вычитаться. В первом случае особенности работы электродвигателя будут аналогичны подключению по схеме последовательного возбуждения, во втором – параллельного.
Источник
Пуск с помощью пускового реостата
В этом случае в цепь вводится переменное сопротивление, которое на начальном этапе обеспечивает снижение токовой нагрузки, пока вращение ротора не достигнет установленных оборотов. По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.
Расчет электрической величины в этом случае будет производиться по формуле:
В лабораторных условиях уменьшение нагрузки может производиться вручную – посредством перемещения ползунка реостата. Однако в промышленности такой метод не получил широкого распространения, так как процесс не согласовывается с токовыми величинами. Поэтому применяется регулировка по току, по ЭДС или по времени, в первом случае задействуется измерение величины в обмотках возбуждения, во втором, на каждую ступень применяется выдержка времени.
Какие существуют схемы подключения электродвигателей постоянного тока
 youtube.com/embed/WckWZtjPbOw?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
youtube.com/embed/WckWZtjPbOw?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
Как работает двигатель постоянного тока с параллельным возбуждением
Содержание
- Возбуждение двигателя постоянного тока. Схемы возбуждения.
- Электродвигатели постоянного тока. Устройство и работа. Виды
- Электродвигатели постоянного тока
- Как работает двигатель постоянного тока с параллельным возбуждением
- Главное меню
- Судовые двигатели
- Двигатели постоянного тока независимого и параллельного возбуждения. Вращающий момент
- Видео
Возбуждение двигателя постоянного тока. Схемы возбуждения.
Возбуждение двигателя постоянного тока является отличительной особенностью таких двигателей. От типа возбуждения зависят механические характеристики электрических машин постоянного тока. Возбуждение может быть параллельным последовательным смешанным и независимым.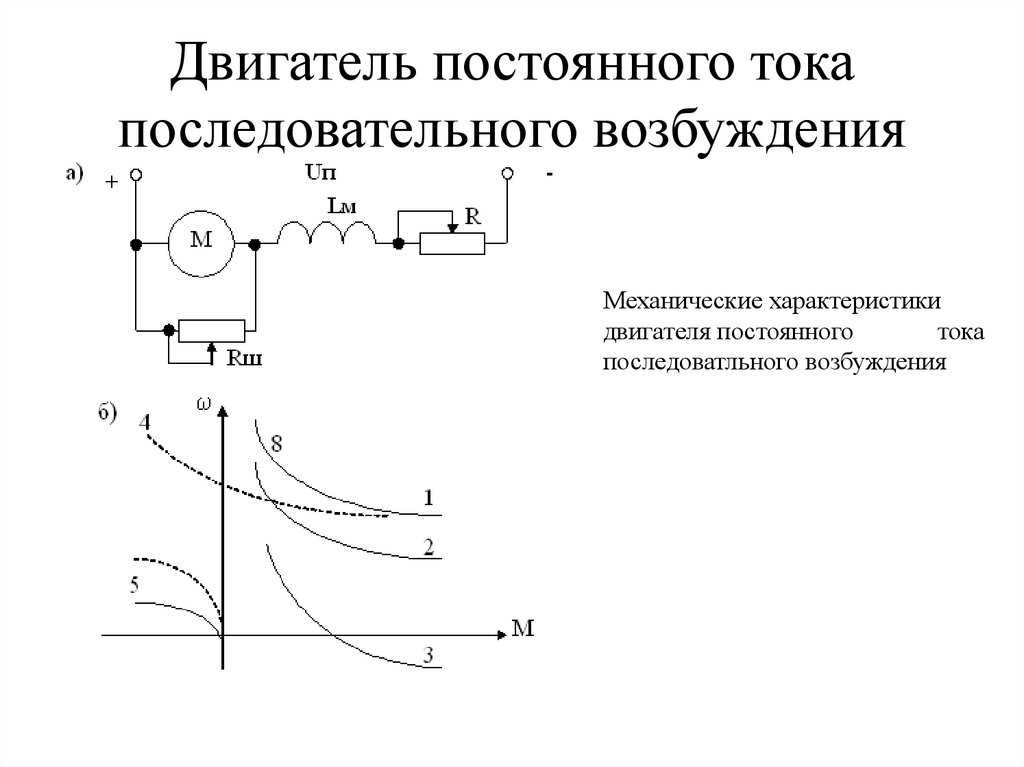 Тип возбуждения означает, в какой последовательности включены обмотки якоря и ротора.
Тип возбуждения означает, в какой последовательности включены обмотки якоря и ротора.
При параллельном возбуждении обмотки якоря и ротора включаются параллельно друг другу к одному источнику тока. Так как у обмотки возбуждения больше витков чем у якорной то и ток в ней течет незначительный. В цепи, как обмотки ротора, так и обмотки якоря могут включаться регулировочные сопротивления.
Обмотка возбуждения может подключаться и к отдельному источнику тока. В этом случае возбуждение будет называться независимым. У такого двигателя характеристики будут схожи с двигателем, в котором применяется постоянный магнит. Скорость вращения двигателя с независимым возбуждением, как и у двигателя с параллельным возбуждением зависит от тока якоря и основного магнитного потока. Основной магнитный поток создается обмоткой ротора.
Скорость вращения можно регулировать с помощью реостата включенного в цепь якоря изменяя тем самым ток в нем. Также можно регулировать ток возбуждения, но здесь нужно быть осторожным.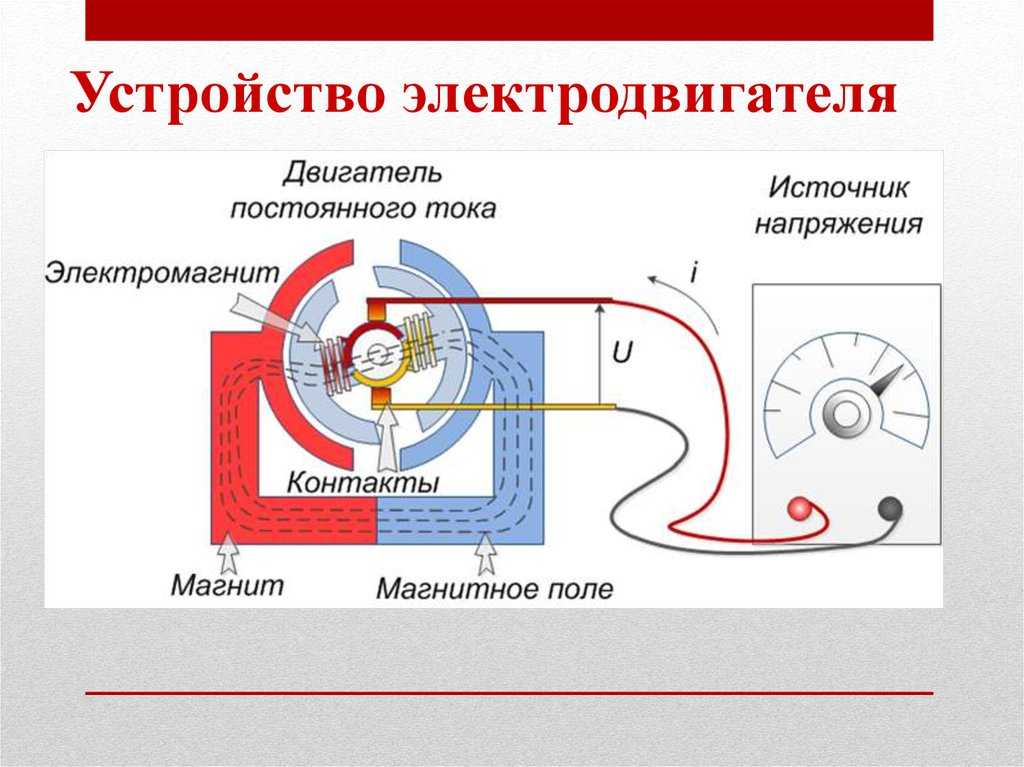 Так как при его чрезмерном уменьшении или полном отсутствии в результате обрыва питающего провода ток в якоре может возрасти до опасных значений.
Так как при его чрезмерном уменьшении или полном отсутствии в результате обрыва питающего провода ток в якоре может возрасти до опасных значений.
Также при малой нагрузке на валу или в режиме холостого хода скорость вращения может настолько увеличится, что может привести к механическому разрушению двигателя.
Если обмотка возбуждения включена последовательно с якорной, то такое возбуждение называется последовательным. При этом через якорь и обмотку возбуждения протекает один и тот же ток. Таким образом, магнитный поток изменяется с изменением нагрузки двигателя. А следовательно скорость двигателя будет зависеть от нагрузки.
Двигатели с таким возбуждением нельзя запускать на холостом ходу либо с небольшой нагрузкой на вал. Их применяют в том случае если, требуется большой пусковой момент или способность выдерживать кратковременные перегрузки.
При смешанном возбуждении используются двигатели, у которых на каждом полюсе есть по две обмотки. Их можно включить так чтобы магнитные потоки как складывались, так и вычитались.
В зависимости от того как соотносятся магнитные потоки двигатель с таким возбуждением может работать как двигатель с последовательным так и двигатель с параллельным возбуждением. Все зависит от ситуации, если нужен большой стартовый момент, такая машина работает в режиме согласного включения обмоток. Если же необходима постоянная скорость вращения, при динамически изменяющейся нагрузке применяют встречное включение обмоток.
В машинах постоянного тока можно изменять направление движения ротора. Для этого необходимо изменить направление тока в одной из обмоток. Якорной либо возбуждения. Изменением полярности направление вращения двигателя можно добиться только в двигателе с независимым возбуждением, или в котором используется постоянный магнит. В других схемах включения нужно переключать одну из обмоток.
Стартовый ток в машине постоянного тока достаточно велик, поэтому ее следует запускать с добавочным реостатом, чтобы избежать повреждения обмоток.
Источник
Электродвигатели постоянного тока.
 Устройство и работа. Виды
Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм.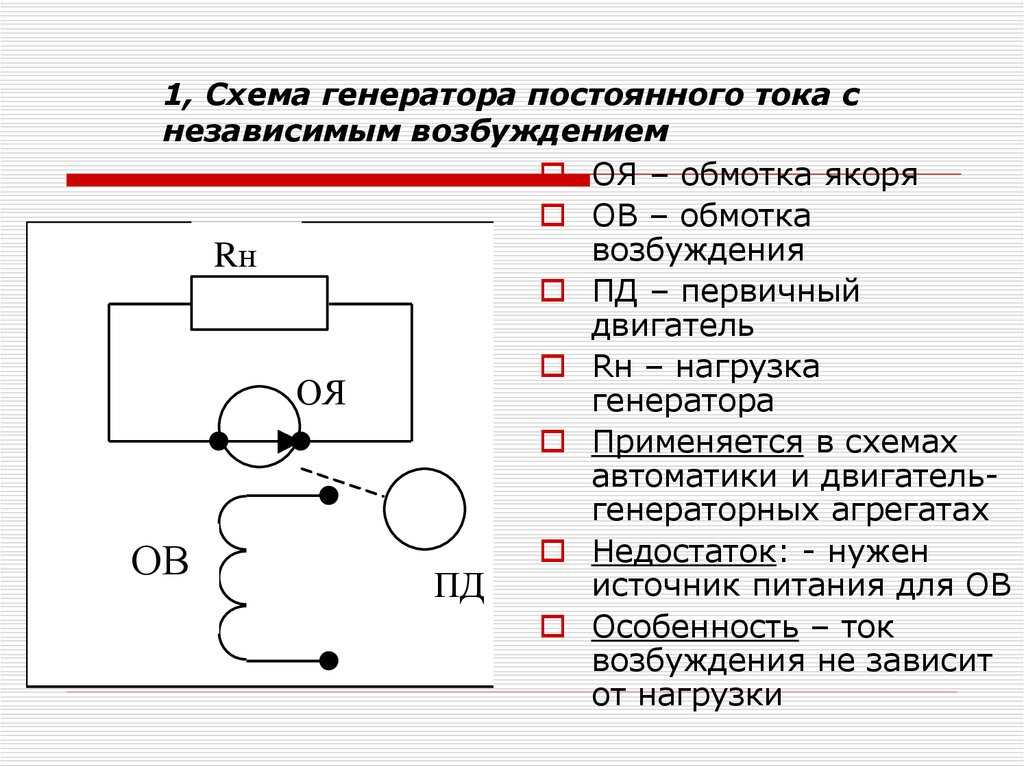 Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Виды
Электродвигатели постоянного тока разделяют по характеру возбуждения:
Независимое возбуждение
При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждение
Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждение
В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатации
Электродвигатели постоянного тока отличаются экологичностью и надежностью.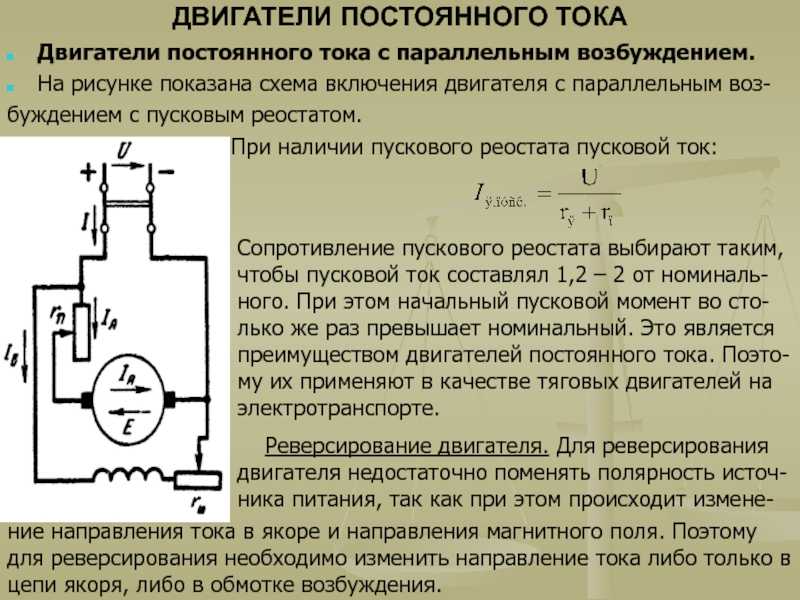 Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Источник
Электродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
Как устроены электродвигатели постоянного тока
Работа электрического двигателя постоянного тока основана на явлении электромагнитной индукции. Из основ электротехники известно, что на проводник с током, помещенный в магнитное поле, действует сила, определяемая по правилу левой руки :
где I — ток, протекающий по проводнику, В — индукция магнитного поля; L — длина проводника.
При пересечении проводником магнитных силовых линий машины в нем наводится электродвижущая сила, которая по отношению к току в проводнике направлена против него, поэтому он а называется обратной или противодействующей (противо-э. д. с). Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
Коммутация в электродвигателях постоянного тока
В момент коммутации в короткозамкнутой секции обмотки под влиянием собственного магнитного поля наводится э. д. с. самоиндукции. Результирующая э. д. с. вызывает в короткозамкнутой секции дополнительный ток, который создает неравномерное распределение плотности тока на контактной поверхности щеток. Это обстоятельство считается основной причиной искрения коллектора под щеткой. Качество коммутации оценивается по степени искрения под сбегающим краем щетки и определяется по шкале степеней искрения.
Способы возбуждения электродвигателей постоянного тока
По способу возбуждения электрические двигатели постоянного тока делят на четыре группы :
1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока.
2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря.
3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой.
4. Двигатели со смешаным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Типы двигателей постоянного тока
Двигатели постоянного тока прежде всего различаются по характеру возбуждения. Двигатели могут быть независимого, последовательного и смешанного возбуждения. Параллельное возбуждение можно не рассматривать. Даже если обмотка возбуждения подключается к той же сети, от которой питается цепь якоря, то и в этом случае ток возбуждения не зависит от тока якоря, так как питающую сеть можно рассматривать как сеть бесконечной мощности, а ее напряжение постоянным.
Обмотку возбуждения всегда подключают непосредственно к сети, и поэтому введение добавочного сопротивления в цепь якоря не оказывает влияния на режим возбуждения. Той специфики, которая существует при параллельном возбуждении в генераторах, здесь быть не может.
В двигателях постоянного тока малой мощности часто используют магнитоэлектрическое возбуждение от постоянных магнитов. При этом существенно упрощается схема включения двигателя, уменьшается расход меди. Следует однако иметь в виду, что, хотя обмотка возбуждения исключается, габариты и масса магнитной системы не ниже, чем при электромагнитном возбуждении машины.
Свойства двигателей в значительной мере определяются их системой возбуждения.
Следует, однако, иметь в виду, что скорость вращения рабочих органов производственных машин существенно ниже. Поэтому между двигателем и рабочей машиной приходится устанавливать редуктор. Чем больше скорость двигателя, тем более сложным и дорогим получается редуктор. В установках большой мощности, где редуктор представляет собой дорогостоящий узел, двигатели проектируются на существенно меньшие скорости.
Следует еще иметь в виду, что механический редуктор всегда вносит значительную погрешность. Поэтому в прецизионных установках желательно использовать тихоходные двигатели, которые можно было бы сочленить с рабочими органами либо напрямую, либо посредством простейшей передачи. В связи с этим появились так называемые высокомоментные двигатели на низкие скорости вращения. Эти двигатели нашли широкое применение в металлорежущих станках, где сочленяются с органами перемещения без каких-либо промежуточных звеньев посредством шарико-винтовых передач.
Электрические двигатели отличаются также по конструктивным при знакам, связанным с условиями их работы. Для нормальных условий используются так называемые открытые и защищенные двигатели, охлаждаемые воздухом помещения, в котором они устанавливаются.
Воздух продувается через каналы машины посредством вентилятора, размещенного на валу двигателя. В агрессивных средах используются закрытые двигатели, охлаждение которых осуществляется за счет внешней ребристой поверхности или наружного обдува. Наконец, выпускаются специальные двигатели для взрывоопасной среды.
Для уменьшения индуктивности обмотки ее укладывают не в пазы, а на поверхность гладкого якоря. Крепится обмотка клеющими составами типа эпоксидной смолы. При малой индуктивности обмотки существенно улучшаются условия коммутации на коллекторе, отпадает необходимость в дополнительных полюсах, может быть использован коллектор меньших размеров. Последнее дополнительно уменьшает момент инерции якоря двигателя.
Еще большие возможности для снижения механической инерции дает использование полого якоря, представляющего собой цилиндр из изоляционного материала. На поверхности этого цилиндра располагается обмотка, изготовляемая печатным способом, штамповкой или из про волоки по шаблону на специальном станке. Крепление обмотки осуществляется клеющими материалами.
Внутри вращающегося цилиндра располагается стальной сердечник, необходимый для создания путей прохождения магнитного потока. В двигателях с гладким и полым якорями вследствие увеличения зазоров в магнитной цепи, обусловленного внесением в них обмотки и изоляционных материалов, требуемая намагничивающая сила для проведения необходимого магнитного потока существенно возрастает. Соответственно магнитная система получается более развитой.
К числу малоинерционных двигателей относятся также двигатели с дисковыми якорями. Диски, на которые наносятся или наклеиваются обмотки, изготовляются из тонкого изоляционного материала, не подверженного короблению, например из стекла. Магнитная система при двухполюсном исполнении представляет собой две скобы, на одной из которых размещены обмотки возбуждения. В связи с малой индуктивностью обмотки якоря машина, как правило, не имеет коллектора и съем тока осуществляется щетками непосредственно с обмотки.
Следует еще упомянуть о линейном двигателе, обеспечивающем не вращательное движение, а поступательное. Он представляет собой двигатель, магнитная система которого как бы развернута и полюсы устанавливаются на линии движения якоря и соответствующего рабочего органа машины. Якорь обычно выполняется как малоинерционный. Габариты и стоимость двигателя велики, так как необходимо значительное число полюсов для обеспечения перемещения на заданном отрезке пути.
Пуск двигателей постоянного тока
В начальный момент пуска двигателя якорь неподвижен и противо-э. д. с. и напряжение в якоре равна нулю, поэтому Iп = U / Rя.
Двигатели мощностью до 1 кВт допускают прямой пуск.
Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи. Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Регулирование частоты вращения электродвигателя постоянного тока
Частота вращения двигателя постоянного тока:
где U — напряжение питающей сети; Iя — ток якоря; R я — сопротивление цепн якоря; kc — коэффициент, характеризующий магнитную систему; Ф — магнитный поток электродвигателя.
Из формулы видно, что частоту вращения электродвигателя постоянного тока можно регулировать тремя путями: изменением потока возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря.
Механические характеристики электродвигателя постоянного тока при различных способах регулирования частоты вращения
Торможение электродвигателей постоянного тока
В электроприводах с электродвигателями постоянного тока применяют три способа торможения: динамическое, рекуперативное и торможение противовключением.
Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Торможение противовключением электродвигателя постоянного тока осуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращения электродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.
Источник
Как работает двигатель постоянного тока с параллельным возбуждением
Главное меню
Судовые двигатели
Обмотка возбуждения электродвигателя постоянного тока с параллельным возбуждением (шунтов о и электродвигатель) подключается к обмотке якоря параллельно (рис. 8), что и обусловливает его электромеханические свойства.
Ток в обмотке возбуждения ШОВ определяется по закону Ома
где R в — сопротивление цепи возбуждения.
Если пренебречь влиянием реакции якоря, то при постоянном напряжении U можно считать, что и магнитный поток электродвигателя Ф является постоянной величиной. При работе электродвигателя его якорь вращается в этом магнитном потоке со скоростью n и в обмотке якоря наводится з. д. с. Е, определяемая по формуле (7).
Таким образом, ток в обмотке якоря должен определяться по выражению
если в его цепи нет дополнительных сопротивлений. Отсюда
Подставив выражение (7) в уравнение (23), получим
Решив уравнение (24) относительно n, получим
Эта аналитически выраженная зависимость числа оборотов электродвигателя от величины тока в обмотке якоря называется уравнением естественной скоростной характеристики электродвигателя. Очевидно, что в случае включения в цепь якоря дополнительного сопротивления R, ток якоря будет равен
а уравнение искусственной скоростной характеристику примет вид:
В свою очередь ток якоря зависит от величины вращающего момента, так как вращающий момент электродвигателя, как будет показано ниже, автоматически следует за моментом сопротивления механизма. Таким образом,
Подставив выражение (28) в уравнения (25) и (27), получим соответственно уравнения естественной и искусственной механических характеристик электродвигателя [уравнения вида п = f(М) ]:
Источник
Двигатели постоянного тока независимого и параллельного возбуждения. Вращающий момент
У двигателя параллельного возбуждения цепь обмотки возбуждения, так же как и цепь обмотки якоря, включена под постоянное напряжение сети. Цепь обмотки возбуждения можно питать и от отдельного источника постоянного тока (независимое возбуждение). И в том и в другом случае ток возбуждения не зависит от тока якоря.
Л и до запуска двигателя находится на контакте 0. При запуске она последовательно перемещается в крайнее левое положение. При этом цепь возбуждения непосредственно подсоединена к сети через дугообразный контакт Ш — шунт, а цепь якоря — через секции пускового реостата. В процессе пуска число включенных секций уменьшается, а по окончании пуска пусковой реостат полностью выводится.
обозначают см. Таким образом,
т.е. вращающий момент двигателя прямо пропорционален току якоря и магнитному потоку возбуждения.
Выражение для вращающего момента двигателя можно получить и другим способом.
Электромагнитная мощность Рэ, за счет которой создается момент, поворачивающий якорь, определяется формулой
где Е — ЭДС в обмотке якоря машины, работающей как генератор, и противо-ЭДС машины, работающей как двигатель.
Из механики известно, что мощность, вращающий момент и угловая скорость вращения связаны соотношением РЭ=Мсо. Следовательно,
Угловая скорость со, измеряемая в рад/с, и скорость вращения п, измеряемая в об/мин, легко выражаются друг через друга:
Двигатели постоянного тока независимого и параллельного возбуждения. Вращающий момент
На 1сакой из схем пусковой реостат двигателя параллельного возбуждения включен правильно?
Определите силу, дейс- твующую на один проводник обмотки якоря, если В =2 В •с/м 2 = 2Тл; /,= 10А;/ = 5 см.
Определите вращающий момент двигателя, если D = 5 см; N=200 (остальные данные см. во втором задании).
Продолжение карт. № 7.13
Постоянная машины, работающей в качестве генератора, равна 6,28. Определите постоянную машины, работающей в качестве двигателя.
Ток якоря увеличился в 2 раза. Как изменился вращающий момент двигателя параллельного возбуждения?
Источник
Видео
Схема двигателя постоянного тока. Устройство и принцип работы.
Электродвигатель постоянного тока. Принцип работы.
Коллекторные двигатели.
Электродвигатели постоянного тока
Электрические машины, часть 8. Двигатели постоянного тока.
Способы возбуждения электрических машин постоянного тока
практикум электрика , двигатель постоянного тока
Получение структурной схемы двигателя постоянного тока с независимым возбуждением
Регулирование частоты вращения двигателей постоянного тока
Электродвигатель постоянного тока 2ПБ90LУХЛ4 работа
Как управлять скоростью и направлением двигателя постоянного тока
Двигатель постоянного тока — это устройство, которое преобразует электрическую энергию в механическую. Сегодня вы найдете двигатели постоянного тока во многих устройствах, на которые мы полагаемся каждый день, таких как бытовая и офисная техника, автомобили, системы контроля доступа и игрушки. В этом уроке мы рассмотрим основные принципы работы двигателей постоянного тока и покажем вам, как управлять скоростью двигателя с помощью ШИМ, Н-мостовой схемы и L29.3D драйвер двигателя.
Как работают двигатели постоянного тока
На провод с током в присутствии магнитного поля действует механическая сила, действующая в определенном направлении.
Чтобы определить фокус этой силы, сэр Джон Амброуз Флеминг разработал простой способ, который использует левую руку, чтобы визуализировать взаимосвязь между потоком тока, направлением магнитного поля и направлением силы. Этот простой, но очень эффективный метод стал известен как правило левой руки Флеминга.
Правило левой руки Флеминга
В двигателе постоянного тока вал соединен с проволочной катушкой, через которую проходит ток. Есть также круглые магниты, окружающие проволочную катушку. Когда на двигатель подается питание, ток течет через проволочную катушку, а магнитное поле заставляет катушку вращаться и поворачивать вал.
Свойства двигателей постоянного тока
При выборе двигателя постоянного тока необходимо учитывать несколько характеристик, определяющих электрические свойства двигателя. В том числе:
- Напряжение: Вы можете найти двигатели постоянного тока, работающие от 1,5 В до 100 В.
- Крутящий момент: Крутящий момент — это сила вращения, которую производит двигатель (в ньютон-метрах). Двигатели постоянного тока для хобби могут варьироваться от 2,8 г-см до 58 кг-см.
- Начальный крутящий момент: Максимальный крутящий момент, развиваемый двигателем, чтобы начать вращательное движение нагрузки. Двигатели постоянного тока имеют высокий пусковой момент.
- Скорость двигателя: Скорость вращения двигателя в оборотах в минуту (об/мин). Типичные скорости холостого хода для двигателей постоянного тока находятся в диапазоне от 1 до 20 000 об/мин.
Как управлять скоростью двигателя с помощью ШИМ
Скорость двигателя постоянного тока прямо пропорциональна напряжению питания. Простым способом управления скоростью двигателя постоянного тока является регулирование напряжения питания с помощью широтно-импульсной модуляции (ШИМ).
Широтно-импульсная модуляция (ШИМ)
Основная идея ШИМ заключается в том, что она очень быстро включает и выключает напряжение питания. Регулируя длину импульсов ВКЛ/ВЫКЛ, мы можем установить напряжение в диапазоне от 0 В до максимального напряжения. Мы будем использовать этот ШИМ-сигнал для прямого питания двигателя.
ШИМ-драйвер двигателя
Существует несколько способов генерации ШИМ-сигнала для двигателя, но в этом руководстве мы будем использовать таймер 555. Вот схема этой цепи:
555 Нестабильный мультивибратор с таймером для управления двигателем постоянного тока
Выход таймера 555 включает и выключает транзистор Q1. Конденсатор С1 заряжается и разряжается через резисторы R1 и R3. Время зарядки или разрядки конденсатора зависит от номиналов резисторов R1 и R3. Как только конденсатор заряжается, он быстро разряжается через диод D2 и переменный резистор RV1 на вывод 7. В процессе разрядки выход таймера 555 падает до 0 В и отключает транзистор. Поворот переменного резистора регулирует скорость двигателя.
Драйвер двигателя H-Bridge
Типичный двигатель постоянного тока имеет два соединительных провода — один для отрицательной клеммы, а другой — для положительной клеммы. Если вы поменяете местами эти клеммы (изменив полярность), двигатель будет вращаться в противоположном направлении. Конечно, есть лучшие способы управления направлением двигателя постоянного тока без постоянной смены клемм.
Для этого можно использовать схему H-Bridge. Схема H-Bridge получила свое название от четырех транзисторов, которые выглядят как буква «H». Схема Н-моста обеспечивает управление двигателем в обоих направлениях за счет использования различных комбинаций переключателей (S1-S4). В реальном сценарии мы используем транзисторы вместо обычных переключателей.
Простой Н-мост
Принцип работы этой схемы прост. У нас есть четыре переключателя, S1-S4. Если мы откроем S2 и S3 и закроем S1 и S4, ток будет течь по часовой стрелке от VCC к земле. Теперь, чтобы поменять полярность двигателя, мы открываем S1 и S4 и замыкаем S2 и S3. Теперь двигатель постоянного тока вращается в противоположном направлении.
Вот схема схемы управления направлением вращения двигателя H-Bridge:
Конфигурация транзистора H-Bridge. BW1 и BW2 управляют обратным направлением двигателя, а FW1 и FW2 реверсируют двигатель постоянного тока.
Драйвер двигателя L293D
Как следует из названия, драйвер двигателя L293D предназначен для управления двигателями постоянного тока. L293D — это популярная ИС драйвера двигателя со встроенной схемой Н-моста, которая может одновременно управлять двумя двигателями постоянного тока. Он может подавать ток до 1 А и напряжение от 4,5 В до 36 В.
Это означает, что моторный привод L293D идеально подходит для создания платформ многоколесных роботов. Вот схема L293D, показывающая, как подключать двигатели:
Схематическая диаграмма L293D controlling two DC motors
L293D Pin Descriptions
| L293D Pin | Description |
| 1 (Enable 1-2) | Controls the left part of the driver |
| 2 (Вход-1) | Контакт входа сигнала |
| 3 (Выход-1) | Подключается к одной из клемм двигателя |
| 4 и 5 | Заземление | Подключается к одной из клемм двигателя |
| 7 (Вход-2) | Контакт входа сигнала |
| 8 (Vcc2) | Напряжение питания двигателя должно быть выше чем 4,5 В |
| 9 (enable3-4) | Управляет правой частью драйвера |
| 10 (Вход-3) | Входной штифт |
| 11 (Выход-3) | |
| 11 (Выход-3) | |
| 11 (Выход-3) | |
| 11 (Outupt к одному из выводов двигателя | |
| 12 и 13 | Заземление |
| 14 (выход-4) | Подключается к одной из терминалов мотора |
| 15 (вход-4) | Источник питания |
Надеюсь, эта статья помогла вам лучше понять, как использовать двигатели постоянного тока в ваших электронных проектах! Оставьте комментарий ниже, если у вас есть какие-либо вопросы.
Как использовать двигатели постоянного тока на Raspberry Pi
Двигатель постоянного тока преобразует электрический ток в механическую энергию. Его изобретение в начале 19 века позволило создать новый механизм для привода машин. Перенесемся в 21 век, и двигатель постоянного тока претерпел быстрые научные и промышленные достижения. Сегодня они бывают самых разных форм, размеров и спецификаций для самых разных применений.
В этом руководстве мы узнаем, как работают двигатели постоянного тока, как подключить их к Raspberry Pi и как создать графический интерфейс пользователя для управления скоростью и направлением одного или двух двигателей постоянного тока.
Различные типы двигателей постоянного тока
Как работают двигатели постоянного тока
Двигатель постоянного тока состоит из следующих основных частей:
Внутренние части двигателя постоянного тока. Двигатели постоянного тока
работают за счет взаимодействия электричества и магнетизма. Электрический ток, протекающий через катушку провода (коммутатор), создает магнитное поле. Когда это магнитное поле помещается во внешнее магнитное поле, создаваемое постоянными магнитами, на катушку действует сила, которая раскручивает двигатель. Эта сила пропорциональна как току, протекающему в катушках, так и силе внешнего магнитного поля.
Зачем двигателям постоянного тока нужен драйвер двигателя
Контакты GPIO Raspberry Pi могут обеспечить ток только 16 мА на контакт, чего недостаточно для питания двигателя постоянного тока. Чтобы обеспечить ток, необходимый двигателю, нам нужно использовать драйвер двигателя. Мы будем использовать распространенный и надежный драйвер двигателя H-bridge L293D. Этот драйвер двигателя будет питать двигатели от отдельного источника питания и управлять двигателями на основе сигналов от Raspberry Pi.
Как управлять двигателем постоянного тока с помощью Raspberry Pi
В этом проекте мы разработаем графический пользовательский интерфейс (GUI) с использованием библиотеки Guizero для управления скоростью и направлением вращения двигателя постоянного тока.
Это детали, которые вам понадобятся:
- Raspberry Pi
- Макета
- Рассказы питания
- 9V. Рассказ
- Джампер -проволо частей, подключите цепь, следуя приведенной ниже схеме.
Код Python для управления одним двигателем
из режима ожидания импорта времени из guizero импортировать приложение, текст, кнопку от гпиозеро импорт Мотор, светодиод двигатель = двигатель (17,18) переключатель двигателя = светодиод (27) app = App(title="GUI Development", layout="grid", height=600, width=800) message = Text(app, text="Интерфейс управления одним двигателем", grid=[4,0]) моторСпидФорвард = 0 моторСпидбэкворд = 0 определение переключателя(): если button0.text=="Начать": MotorSwitch.on () button0.text="Стоп" elif button0.text == "Стоп": MotorSwitch.off() button0.text = "Пуск" защита впередSpeedIncrease(): глобальный моторSpeedForward motor.forward(скорость=motorSpeedForward) print("Увеличение скорости двигателя назад. Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward += 0,1
если MotorSpeedForward >= 1:
моторСпидФорвард = 1
защита впередSpeedReduce():
глобальный моторSpeedForward
motor.forward(скорость=motorSpeedForward)
print("Уменьшить скорость двигателя вперед. Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward -= 0,1
если MotorSpeedForward <= 0:
моторСпидФорвард = 0
определение обратной скорости увеличения():
глобальный моторСкоростьНазад
motor.forward(скорость=motorSpeedBackward)
print("Увеличение скорости двигателя назад. Текущая скорость = "+ str(motorSpeedBackward))
MotorSpeedBackward += 0,1
если motorSpeedBackward >= 1:
моторСпидбэкворд = 1
защита назадSpeedReduce():
глобальный моторСкоростьНазад
motor.backward(скорость=motorSpeedBackward)
print("Уменьшить скорость двигателя назад. Текущая скорость = "+ str(motorSpeedBackward))
MotorSpeedBackward -= 0,1
если MotorSpeedBackward <= 0:
моторСпидбэкворд = 0
Текст(приложение, "Мотор",сетка=[2,1])
button0 = PushButton (приложение, команда = toggleSwitch, текст = «Пуск», ширина = 10, высота = 3, сетка = [2,4])
button1 = PushButton (приложение, command=forwardSpeedIncrease, text="Frwd Speed +", width=10, height=3, grid=[2,3])
button2 = PushButton (приложение, command=backwardSpeedReduce, text="Bckwd Speed -", width=10, height=3, grid=[2,5])
button3 = PushButton (приложение, command=backwardSpeedIncrease, text = "Bckwd Speed +", width=10, height=3, grid=[1,4])
button4 = PushButton (приложение, command=forwardSpeedReduce, text="Frwd Speed -", width=10, height=3, grid=[3,4])
приложение. display() Код Описание
В первых трех строчках импортируем необходимые для проекта библиотеки. Для разработки GUI нам понадобится библиотека guizero. А из библиотеки gpiozero мы импортируем класс двигателя и класс светодиода. Нам нужен класс LED, потому что он обеспечивает простой способ управления выводом включения драйвера. Это позволит нам запускать и останавливать двигатель.
В качестве альтернативы вы можете написать код Python для управления выводами GPIO для сигналов двигателя и выводом включения, чтобы избавиться от библиотеки gpiozero. Я использовал только эту библиотеку, потому что мы пишем всего несколько строк кода, которые легко понять и которым легко следовать.
Мы подключили контакты управления двигателем L293D к GPIO17 и GPIO18 Raspberry Pi. Теперь мы создаем экземпляр класса мотора с
motor = Motor(17,18)иmotorSwitch = LED(27). Контрольный вывод Enable подключен к GPIO27.Затем мы инициализируем две переменные с именами
motorSpeedForwardиmotorSpeedBackwardдля управления скоростью двигателя.В библиотеке gpiozero есть функции для управления направлением вращения двигателя. Чтобы переместить двигатель вперед, используйте
мотор.вперед(). Чтобы переместить мотор назад, используйтеmotor.backward(). Эти функции принимают скорость двигателя в качестве параметра. Скорость может быть любым числом от 0 (полное выключение) до 1 (максимальная скорость).В приведенной выше программе мы заставляем двигатель вращаться вперед следующим образом:
motor.forward(speed=motorSpeedForward)
Заставляем двигатель вращаться назад следующим образом:
motor.backward(speed=motorSpeedBackward)
Мы можем также увеличивайте и уменьшайте скорость двигателя в коде, выполняя некоторые математические операции с
motorSpeedForwardиmotorSpeedBackwardпеременные. В каждой приведенной выше функции скорости мы выполняем сложное сложение и сложное вычитание переменных, чтобы изменить их значение и увеличить или уменьшить скорость двигателя в условиях прямого и обратного вращения.Каждая функция выполняет математическую операцию в зависимости от того, что она должна делать. Самое главное, мы увеличиваем/уменьшаем переменные для скорости двигателя с коэффициентом 0,1, и мы сохраняем переменные между 0 и 1.
Наконец, мы вызываем функцию
app.display()для запуска графического интерфейса.Код для GUI
Код для GUI находится вверху и внизу программы выше. Например, это код для создания простого графического интерфейса:
из time import sleep из guizero импортировать приложение, текст, кнопку импорт системы приложение = Приложение (название = «Разработка графического интерфейса») сообщение = текст (приложение, текст = "Графический интерфейс управления двигателем") app.display()
После определения функций для двигателя мы создаем пользовательский интерфейс и вызываем вышеуказанные функции, когда пользователь нажимает соответствующую кнопку.
Кнопки запрограммированы с этим кодом:
Текст(приложение, "Мотор",сетка=[2,1]) button0 = PushButton (приложение, команда = toggleSwitch, текст = «Пуск», ширина = 10, высота = 3, сетка = [2,4]) button1 = PushButton (приложение, command=forwardSpeedIncrease, text="Frwd Speed +", width=10, height=3, grid=[2,3]) button2 = PushButton (приложение, command=backwardSpeedReduce, text="Bckwd Speed -", width=10, height=3, grid=[2,5]) button3 = PushButton (приложение, command=backwardSpeedIncrease, text = "Bckwd Speed +", width=10, height=3, grid=[1,4]) button4 = PushButton(app, command=forwardSpeedReduce, text="Frwd Speed -", width=10, height=3, grid=[3,4])
Управление двумя двигателями с помощью Raspberry Pi
В этом проекте мы будем использовать графический интерфейс для управления скоростью и направлением двух двигателей постоянного тока.
Для этого нам нужно лишь внести небольшие изменения в приведенный выше код.Это детали, которые вам понадобятся:
- Raspberry Pi
- Джамперные провода
- Глепота
- L293D Controller
- Два Двигателя DC
- Внешний источник электропередачи
- 9V Fielc частей, подключите двигатели, следуя этой электрической схеме:
Код Python для управления двумя двигателями
В этой программе мы используем класс робота из библиотеки gpiozero. Все остальное остается таким же, как и в предыдущем коде.
из сна импорта времени из guizero импортировать приложение, текст, кнопку от гпиозеро импортный робот, светодиодный двигатель = робот (слева = (4, 14), справа = (17, 18)) переключатель двигателя = светодиод (27) app = App(title="GUI Development", layout="grid", height=600, width=800) сообщение = текст (приложение, текст = "Интерфейс управления двумя двигателями", сетка = [4,0]) моторСпидФорвард = 0 моторСпидбэкворд = 0 определение переключателя(): если button0. text=="Начать":
MotorSwitch.on ()
button0.text="Стоп"
elif button0.text == "Стоп":
MotorSwitch.off()
button0.text = "Пуск"
защита впередSpeedIncrease():
глобальный моторSpeedForward
motor.forward(скорость=motorSpeedForward)
print("Увеличение скорости двигателя назад. Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward += 0,1
если MotorSpeedForward >= 1:
моторСпидФорвард = 1
защита впередSpeedReduce():
глобальный моторSpeedForward
motor.forward(скорость=motorSpeedForward)
print("Уменьшить скорость двигателя вперед. Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward -= 0,1
если MotorSpeedForward <= 0:
моторСпидФорвард = 0
определение обратной скорости увеличения():
глобальный моторСкоростьНазад
motor.forward(скорость=motorSpeedBackward)
print("Увеличение скорости двигателя назад. Текущая скорость = "+ str(motorSpeedBackward))
MotorSpeedBackward += 0,1
если motorSpeedBackward >= 1:
моторСпидбэкворд = 1
защита назадSpeedReduce():
глобальный моторСкоростьНазад
motor. backward(скорость=motorSpeedBackward)
print("Уменьшить скорость двигателя назад. Текущая скорость = "+ str(motorSpeedBackward))
MotorSpeedBackward -= 0,1
если MotorSpeedBackward <= 0:
моторСпидбэкворд = 0
Текст(приложение, "Мотор",сетка=[2,1])
button0 = PushButton (приложение, команда = toggleSwitch, текст = «Пуск», ширина = 10, высота = 3, сетка = [2,4])
button1 = PushButton (приложение, command=forwardSpeedIncrease, text="Frwd Speed +", width=10, height=3, grid=[2,3])
button2 = PushButton (приложение, command=backwardSpeedReduce, text="Bckwd Speed -", width=10, height=3, grid=[2,5])
button3 = PushButton (приложение, command=backwardSpeedIncrease, text = "Bckwd Speed +", width=10, height=3, grid=[1,4])
button4 = PushButton (приложение, command=forwardSpeedReduce, text="Frwd Speed -", width=10, height=3, grid=[3,4])
приложение.display() Это все, что нам нужно изменить, чтобы управлять двумя моторами! Надеюсь, это помогло вам начать использовать двигатели постоянного тока на Raspberry Pi.
Не забудьте оставить комментарий ниже, если у вас есть вопросы о чем-либо!Двигатели постоянного тока
— Circuit Cellar
Краткие сведения • Ресурсы
07.01.2021
В какой-то момент нам всем нужно заставить нашу электронику работать, чтобы действительно что-то делать в физическом мире. Для этого нам нужны какие-то приводы — устройства, которые превращают электрические сигналы в физическое движение. Одним из наиболее распространенных типов приводов, с которыми вы, вероятно, столкнетесь, является щеточный двигатель постоянного тока с постоянными магнитами. Они дешевы, просты в управлении, всего с двумя клеммами и вездесущи.
Существует множество ссылок, описывающих, как они устроены и как они работают, поэтому я собираюсь сосредоточиться на том, как понять, как они превращают напряжение и ток в крутящий момент и скорость вращения (или угловую скорость, как это должно быть более правильно называется), и что это значит для вас как для проектировщика схем.
РИСУНОК 1. Эквивалентная схема коллекторного двигателя постоянного тока довольно проста. В большинстве случаев индуктивностью можно пренебречь, поскольку электрическая постоянная времени L/R обычно намного ниже, чем механическая постоянная времени, обусловленная инерцией ротора.
Эквивалентная схема двигателя постоянного тока с щеточными постоянными магнитами показана на рис. 1 . Резистор R и катушка индуктивности L представляют сопротивление и индуктивность на клеммах соответственно. Источник напряжения E представляет собой противо-ЭДС, генерируемую обмотками двигателя, когда они вращаются в магнитном поле. Это напряжение имеет противоположный знак по отношению к напряжению на клеммах и пропорционально угловой скорости двигателя согласно уравнению:
Крутящий момент, создаваемый двигателем, пропорционален току, протекающему через двигатель, согласно аналогичному уравнению:
Константы k T
и k s приведены в паспорте двигателя.
Они могут казаться разными в зависимости от используемых единиц, но если вы переведете их в единицы СИ в обоих случаях, вы обнаружите, что это одно и то же число!При анализе двигателя мы обычно можем игнорировать индуктивность, поскольку
L/R электрическая постоянная времени намного короче, чем механическая постоянная времени, определяемая моментом инерции ротора. Это упрощает анализ, и мы видим, что ток двигателя будет определяться законом Ома.
— РЕКЛАМА—
—Реклама здесь—
и, следовательно, крутящий момент двигателя должен быть
Теперь мы можем построить серию кривых крутящий момент-скорость для двигателя постоянного тока при различных напряжениях на клеммах. Рисунок 2 показывает, как это выглядит. Момент опрокидывания (когда ω
равно нулю) будет кВ/р , а скорость холостого хода (когда T равно нулю) будет В/к .
РИСУНОК 2. Кривые крутящего момента двигателя постоянного тока 12 В при различных напряжениях показаны на этом рисунке. Пересечение по оси Y дает крутящий момент двигателя, а пересечение по оси X дает скорость холостого хода (или угловую скорость, если мы будем педантичны).
Чтобы понять, что происходит при приложении нагрузки, нам нужно нанести характеристики нагрузки на кривую крутящего момента и скорости, как мы это сделали в Рисунок 3 . Нагрузка с постоянным крутящим моментом (например, тяговая нагрузка) представлена горизонтальной линией, а квадратичная нагрузка (например, вентилятор или центробежный насос) представлена параболической кривой. Пересечение между двигателем и кривой зависимости крутящего момента от скорости при заданном напряжении представляет собой рабочую точку.
РИСУНОК 3. Чтобы найти рабочую точку, характеристика скорости вращения нагрузки накладывается на кривые двигателя. Красная и синяя кривые представляют нагрузку с постоянным крутящим моментом и квадратичную нагрузку крутящего момента соответственно.
Точки показывают рабочую точку при различных напряжениях двигателя.Исходя из этого, мы можем построить график зависимости скорости двигателя от напряжения для заданной нагрузки, как показано на Рисунок 4 . Здесь вы можете видеть, что нагрузка с постоянным крутящим моментом не начнет вращаться до тех пор, пока напряжение не достигнет уровня, обеспечивающего достаточный крутящий момент двигателя для преодоления крутящего момента нагрузки, но затем скорость будет увеличиваться более или менее линейно с напряжением. С другой стороны, квадратичная нагрузка начнет вращаться при низком напряжении, но не будет увеличивать скорость линейно.
РИСУНОК 4. Эти кривые показывают информацию на Рисунке 3 другим способом, связывая скорость двигателя с напряжением на клеммах для каждого типа нагрузки. Нагрузка с постоянным крутящим моментом не запустится, пока крутящего момента двигателя не будет достаточно для преодоления нагрузки. Квадратичная нагрузка начинается с низкой скорости, но кривая не является линейной.
Как во всем этом разобраться? Ключевым моментом является понимание характеристик крутящего момента вашей нагрузки и того, как она взаимодействует с двигателем. Это позволяет получить представление о том, как скорость будет меняться в зависимости от напряжения двигателя. Если вам нужно точное регулирование скорости, вам нужно будет прибегнуть к методам замкнутого контура с использованием какого-либо датчика скорости.
Каталожные номера:
«Коллекторные двигатели постоянного тока от Maxon | Максон Групп». По состоянию на 27 ноября 2020 г. https://www.maxongroup.net.au/maxon/view/content/overview-dc-motor.
«Д.К. Учебное пособие по кривой крутящего момента/скорости двигателя: понимание характеристик двигателя». По состоянию на 27 ноября 2020 г. http://lancet.mit.edu/motors/motors3.html
Будьте в курсе наших БЕСПЛАТНЫХ еженедельных информационных бюллетеней! Не пропустите новые выпуски Circuit Cellar.
— РЕКЛАМА —
— Реклама здесь —
Подписаться на журнал Circuit Cellar
Примечание. Мы сделали выпуск Circuit Cellar за май 2020 г. бесплатным образцом. В нем вы найдете большое разнообразие статей и информации, иллюстрирующих типичный номер текущего журнала.
Хотите написать для Circuit Cellar ? Мы всегда принимаем статьи/сообщения от технического сообщества. Свяжитесь с нами и давайте обсудим ваши идеи. Спонсор этой статьи
Эндрю Левидо
+ сообщения
Эндрю Левидо ([email protected]) получил степень бакалавра электротехники в Сиднее, Австралия, в 1986. Он несколько лет работал в отделе исследований и разработок в компаниях, занимающихся силовой электроникой и телекоммуникациями, прежде чем перейти на руководящие должности. В свободное время Эндрю проявлял практический интерес к электронике, особенно встраиваемым системам, силовой электронике и теории управления.