Содержание
Шаговый двигатель proteus
By ledpinD9 , June 19, in МК для начинающих. Так как не имею шагового двигателя под рукой, решил все протестировать в Proteus ISIS Proteus , но столкнулся с проблемой. Сейчас шаг за шагом опишу порядок действий, возможно я допустил ошибки в программировании Arduino, либо в Proteus. Проверил на нем работоспособность парочки легких программ с миганием светодиодов, вроде все работает отлично. Далее добавил драйвер LD и биполярный шаговый двигатель.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Контроллер для управления биполярным шаговым двигателем на PIC12F629
- Устройство управления шаговым двигателем
- ДОРАБОТКА СХЕМЫ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ
- Управление шаговым двигателем с использованием STM32f411
- Контроллер биполярного шагового двигателя
- Управление шаговым двигателем с помощью AVR микроконтроллера ATmega8
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: 🔨 КАК ЗАПУСТИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ 💡 Без Драйвера!
youtube.com/embed/aCKO1FflqFg» frameborder=»0″ allowfullscreen=»»/>
Контроллер для управления биполярным шаговым двигателем на PIC12F629
Для практических задач можно считать, что шаговый мотор немного похож на сервопривод. Можно задать ему повернуться в некоторое положение и можно рассчитывать получить достаточно стабильные результаты в нескольких повторных экспериментах.
Преимуществом шаговых двигателей является то, что можно достичь гораздо большей степени контроля над движением. Достаточно выгодное приобретение, если сравнивать с редукторным двигателем постоянного тока, контроллером двигателя и колесным энкодером!
Размеры шагового двигателя 28BYJ Ниже представлена детальная спецификация шагового двигателя 28BYJ Двигатель имеет четыре обмотки, которые запитываются последовательно, чтобы повернуть вал с магнитом. Подключение выводов шагового двигателя 28BYJ С 4 обмотками это дает 8 различных сигналов, как показано в таблице ниже.
Плата драйвера шагового двигателя на базе микросхемы ULN , представляющей собой массив транзисторов, включенных по схеме Дарлингтона, позволяет достаточно просто управлять мотором 28BYJ , используя микроконтроллер.
Помимо самой микросхемы ULNAN , на плате имеется пятиконтактный разъем для подключения к шаговику и четыре светодиода, показывающих, какая из обмоток запитана в текущий момент времени. Плата управления на базе ULN Замечу, что питать мотор от 5 В Arduino не рекомендуется, так как мотор может потреблять ток, превышающий возможности Arduino. Лучше использовать внешний В источник питания, выдающий ток не менее 1 А. Четыре управляющих входа помечены как IN1-IN4 и должны быть подключены к четырем цифровым выводам Arduino.
Стандартная библиотека Stepper , идущая с Arduino IDE , поддерживает только полношаговый метод управления и имеет сильно ограниченные возможности. Эта библиотека очень хорошо работает совместно с шаговым мотором 28BYJ мотор почти не греется , а также поддерживает ускорение, что позволяет заставить мотор вращаться быстрее.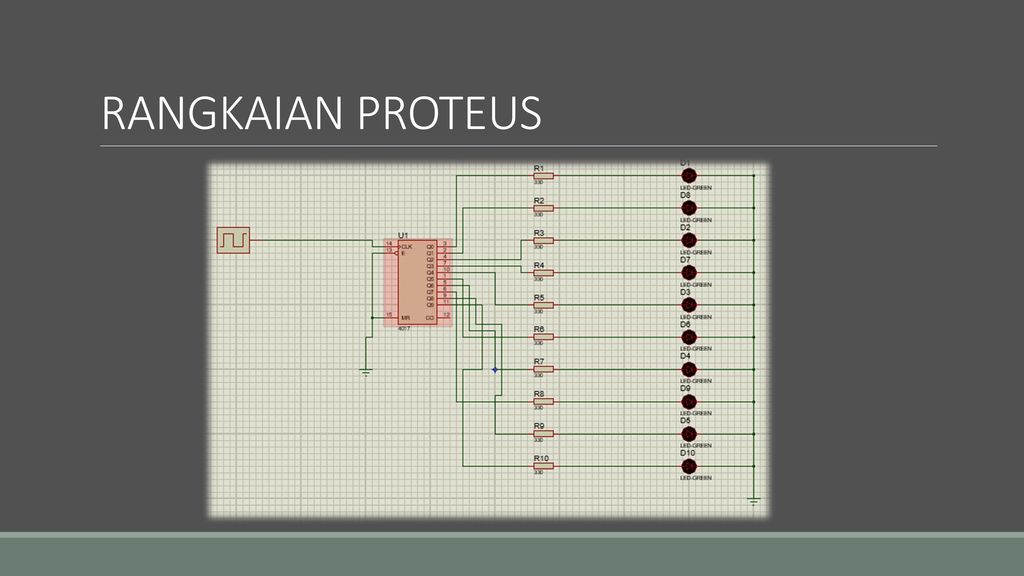 Библиотека использует код, не блокирующий шаги и включает немало других приятных особенностей. Как установить библиотеку в Arduino IDE. Как вы оцениваете эту публикацию?
Библиотека использует код, не блокирующий шаги и включает немало других приятных особенностей. Как установить библиотеку в Arduino IDE. Как вы оцениваете эту публикацию?
А вот почему они у меня так адово грелись Надо будет снова их опробовать нос другой библиотекой Кстати,что бы увеличить крутящий момент можно движок переделать в биполярный Там всего та надо среднюю точку перерезать Правда тогда драйвер в комплекте не подойдет но я не думаю что это большая проблема Не заметил никакой разницы между этой библиотекой и другими.
Увеличить обороты не получилось, что тут что в стандартной библиотеке одинаково. Разницы в микрошаге и полном шаге тоже не заметил. Как вживить регулировку скорости переменным резистором пока тоже не понял. Какой метод вызывать чтобы шаговые двигатели просто крутились в нужном направлении с заданной скоростью? Безо всяких ускорений и прочего По одному шагу за цикл loop, с возможностью поменять направление в каждой итерации цикла.
Метод step 1 из стандартной библиотеки мне подходил, но нужно чтобы несколько шаговиков крутились с разной скоростью, а в стандартной setSpeed почему-то задает скорость всем сразу.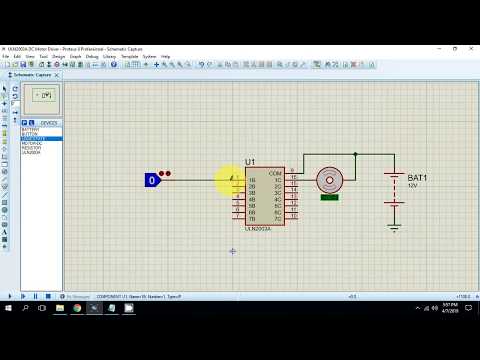 В AccelStepper во всех примерах заранее известно, сколько тысяч шагов в каком направлении надо сделать, а я хочу управлять в реальном времени.
В AccelStepper во всех примерах заранее известно, сколько тысяч шагов в каком направлении надо сделать, а я хочу управлять в реальном времени.
У Вас в коде где то ошибка. Придется писать самому. ULN предназначена для управления 12 вольтовой нагрузкой, просто не превышайте её возможностей. С удовольствием посмотрю на реализацию вращения в одну, а потом в другую сторону через конструктор классов и direction forward backward , которые упоминаются в справочнике AccelStepper. Отсчет шагов через moveTo не устраивает. Помогите вставить две кнопки,нажатие на первую запускает движение в одну сторону и потом мотор просто останавливается,а нажатие на вторую кнопку запускает процесс в обратную сторону.
Если нажимать одну и туже кнопку то мотор каждый раз начинает движение в одну сторону. Вот так можно отнаследоваться от AccelStepper и получить нормальную поддержку шагов на один оборот:. Или вообще в условных попугаях? Имя обязательно.
Mail не будет опубликовано обязательно. Оповещать о новых комментариях по почте.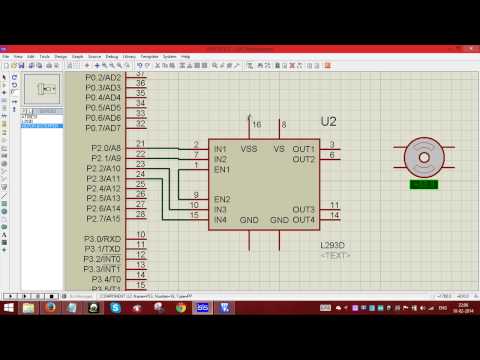 Главная О блоге Публикации Карта сайта Контакты.
Главная О блоге Публикации Карта сайта Контакты.
Библиотека AccelStepper AccelStepper Category: Programs Date: Еще по этой теме Motor Shield Видеоурок 5. Моторы и транзисторы Расчет параметров двигателей колесного робота Как работают шаговые двигатели Видеоурок 4. Аналоговые входы Arduino Видеоурок 3. Метки: Мотор. Андрей Алексеенко пишет:. Серега пишет:. Александр пишет:. Дмитрий пишет:. Максим пишет:. Моркоу пишет:. Печкин пишет:. Артур пишет:. Никита пишет:. Алексашка пишет:. Лиля пишет:. Антон пишет:. Оставить комментарий Щелкните сюда чтобы отменить ответ.
Подпишитесь на новости Подпишитесь и получайте информацию о новых публикациях в этом блоге. Все права защищены. Рекомендован полушаговый режим 8-шаговая управляющая сигнальная последовательность. Полушаговый режим: 8-шаговая управляющая сигнальная последовательность рекомендовано. Режим полного шага: 4-шаговая управляющая сигнальная последовательность. Производителем заявлено Однако, некоторые пытливые товарищи с форума Arduino разобрали редуктор и определили, что, в действительности передаточное число равно
Устройство управления шаговым двигателем
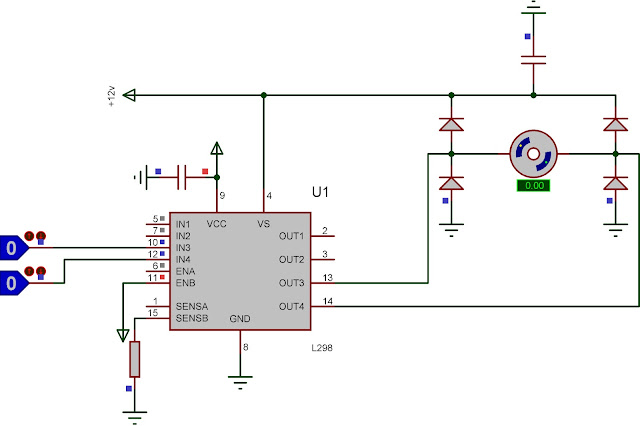
Авторизация Зарегистрироваться Логин или эл.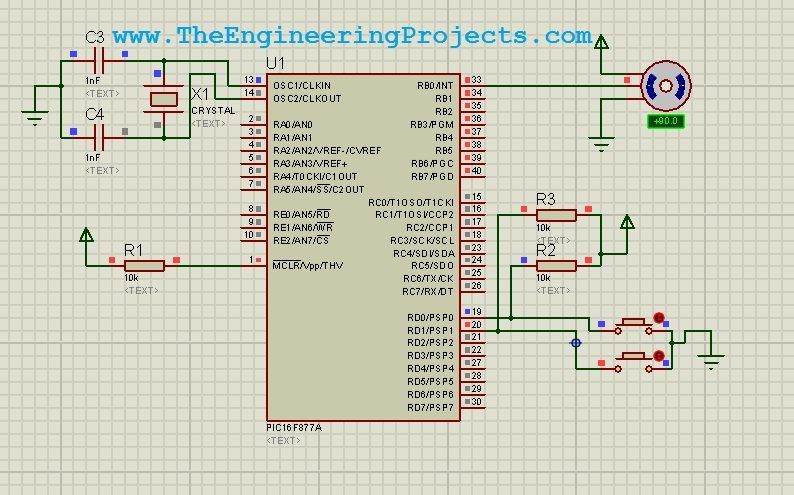 Напомнить пароль Пароль. Войти Запомнить меня. Настала пора Arduino поуправлять моторчиками : Для этого воспользуемся самым популярным драйвером, используемым для управления моторчиками — микросхемой LD. LD содержит два драйвера для управления электродвигателями небольшой мощности. Имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов.
Напомнить пароль Пароль. Войти Запомнить меня. Настала пора Arduino поуправлять моторчиками : Для этого воспользуемся самым популярным драйвером, используемым для управления моторчиками — микросхемой LD. LD содержит два драйвера для управления электродвигателями небольшой мощности. Имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов.
У биполярного шагового двигателя есть 2 обмотки, без отводов от Мне поставили задачу — заставить вращаться такой вот, биполярный шаговый мотор. Рисунок печатной платы (LAY), прошивка (HEX) и модель под PROTEUS.
ДОРАБОТКА СХЕМЫ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ
На данный раздел помимо Правил форума распространяются текже следующие правила:. Если Вам понравилась атмосфера форума, заходите к нам чаще! Пожалуйста, подождите Здравствуйте, Гость Вход Регистрация Что даёт регистрация на форуме? Текстоплет Дата Доброго времени суток! Занялся разработкой модели в Proteus. Прежде чем заняться большой моделью решил отдельно изучить взаимодействие своего PIC12F и шаговика.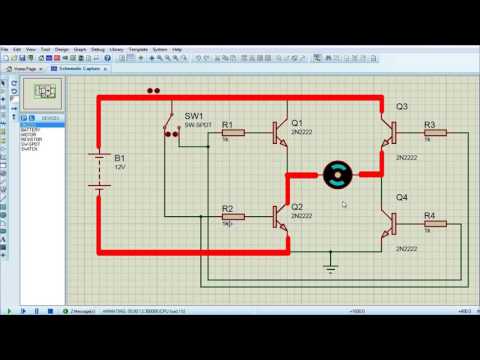 Хочу добиться не непрерывного вращения двигателя, а чтобы он совершал поворот на определенный угол.
Хочу добиться не непрерывного вращения двигателя, а чтобы он совершал поворот на определенный угол.
Управление шаговым двигателем с использованием STM32f411
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны. На сегодняшнем этапе развития информационных технологий, все шире внедряются в производство с системой автоматизированного управления. На ряду с такими важными элементами, как первичные преобразователи информации и системы управления важную роль играют исполнительные устройства разного рода. Одним из видов таких устройств являются электроприводы.
Когда хочется чего-то более существенного чем просто помигать светодиодами, и когда усвоены основы работы с микроконтроллером можно переходить к более серьёзным проектам.
Контроллер биполярного шагового двигателя
Есть судя по Управление шаговым двигателем на PIC16F Подскажите возможно применить данный алгоритм для управления биполярным шаговым двигателем Не очень разбираюсь в микроконтроллерах Симуляция и управление двигателем на МК Atmega Добрый день!!! С другой периферией разобрался, с таймером
Управление шаговым двигателем с помощью AVR микроконтроллера ATmega8
Датчик влажности почвы. Простой проект. Для автоматизированного полива домашних растений в первую очередь необходимо изучить применение датчиков влажности почвы. В зависимости от вида растений земля в цветочном горшке должна быть влажной всегда или, наоборот, большую часть времени должна быть умеренно сухой. Например, растение Циперус требует постоянно увлажненной почвы, поэтому экспериментировать с автоматическим поливом можно начать с него. Эти сенсоры простые и медленные, но при этом отлично подходят для хобби-проектов на Arduino. Датчики DHT состоят из двух основных частей: ёмкостный датчик влажности и термистор.
Простой проект. Для автоматизированного полива домашних растений в первую очередь необходимо изучить применение датчиков влажности почвы. В зависимости от вида растений земля в цветочном горшке должна быть влажной всегда или, наоборот, большую часть времени должна быть умеренно сухой. Например, растение Циперус требует постоянно увлажненной почвы, поэтому экспериментировать с автоматическим поливом можно начать с него. Эти сенсоры простые и медленные, но при этом отлично подходят для хобби-проектов на Arduino. Датчики DHT состоят из двух основных частей: ёмкостный датчик влажности и термистор.
Биполярный шаговый двигатель отличается от униполярного шагового двигателя тем, что полярность обмоток изменяется во время.
Русская поддержка phpBB. Please, in order to access our website you need to activate JavaScript in your Browser!!! How to enable JavaScript in your Browser. Поиск Расширенный поиск.
Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов.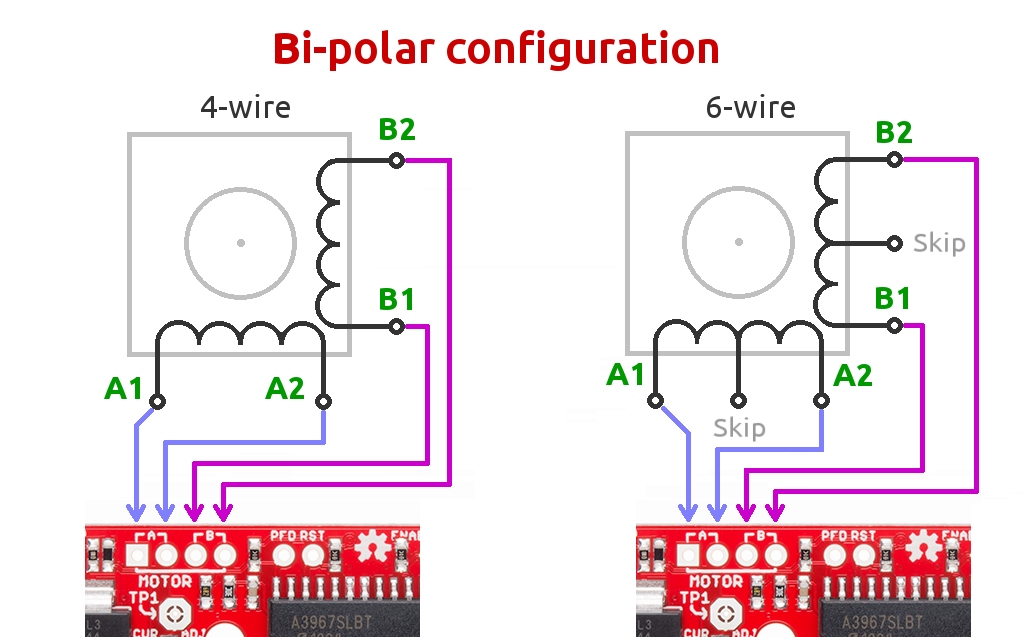 Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах 5-и дюймовых и еще много где.
Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах 5-и дюймовых и еще много где.
Подпишитесь на автора, если вам нравятся его публикации.
Как правило, у каждого радиолюбителя есть выкрученные из старой радиоаппаратуры 2-тактные униполярные ШД с 6-ю или 5-ю проводами. В современных устройствах они практически не используются, но из них можно много чего сделать. Данный метод не претендует на истину и носит лишь информативный характер. Предполагается, что если вы зашли на эту страничку, значит, Вы знаете, что такое шаговый двигатель. В данной статье не рассматривается применение специализированных микросхем. Цель данной статьи — наработка материала для создания более сложного устройства в будущем на основе одного микроконтроллера.
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах. Короче, вариантов много.
Тогда вы будете получать уведомления о его новых постах. Короче, вариантов много.
Драйвер биполярного шагового двигателя на Attiny261
Главная » Измерение и контроль » Драйвер биполярного шагового двигателя на Attiny261
Этот драйвер 4-х проводного биполярного шагового двигателя может найти множество применений при проектировании систем автоматизации или игрушек. Несмотря на простоту конструкции, система характеризуется рядом полезных функциональных особенностей.
Принципиальная схема драйвера биполярного шагового двигателя показана на следующем рисунке.
Драйвер запитан от источника постоянного напряжения 12В. Диод VD1 (1N4007) защищает схему от ошибочного подключения полярности входного напряжения, а конденсаторы С2…С5 выполняют роль фильтра питания.
Входное напряжение подается на стабилизатор напряжения DA1 (78L05), который обеспечивает необходимое напряжение +5 В для работы микроконтроллера.
Работой драйвера шагового двигателя управляет микроконтроллер DD1 (ATtiny261), работающий от внутреннего тактового генератора.
Непосредственное силовое управление шаговым двигателем осуществляется микросхемой DD2 (L293D), представляющая собой сборку из двух H-мостов.
Потенциометр R1 используется для регулировки скорости вращения. Светодиод HL1 показывает состояние работы устройства.
Переключатели Direct и Start/Stop используются для управления выбором направления вращения и торможением двигателя, соответственно.
Перемычки 1/0,5 и ST/DY используются для настройки режима работы драйвера. Перемычка 1/0,5 используется для выбора режима работы двигателя. Если перемычки нет — пошаговая работа, перемычка установлена - полшага.
Пошаговая работа является самым простым способом управления шаговым двигателем, а полушаговая работа заключается в добавлении промежуточных состояний в управлении. На практике это приводит к плавной работе двигателя, но увеличивает потребление тока примерно на 50-60%.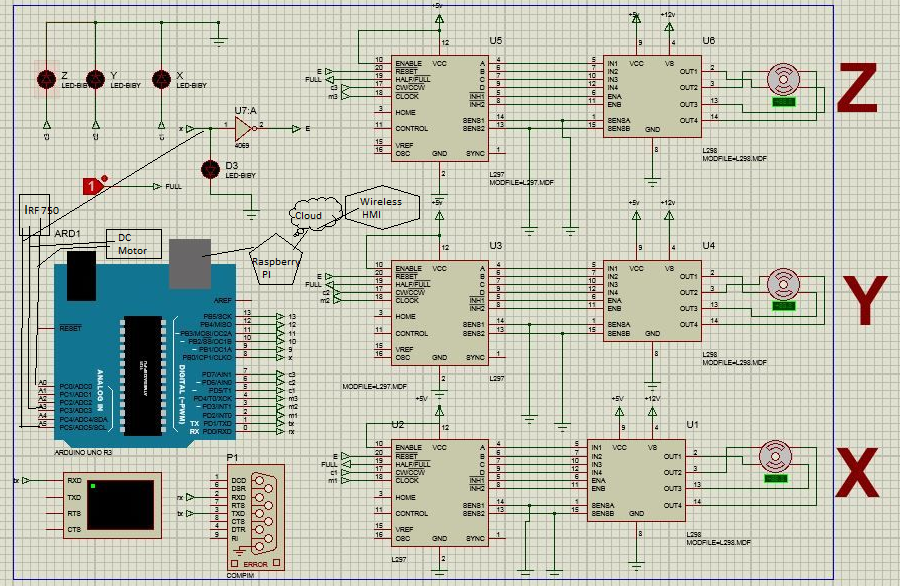
Перемычка ST/DY предназначена для выбора способа торможения двигателя. Нет перемычки — статическое торможение, перемычка установлена – динамическое торможения.
Блок питания 0…30В/3A
Набор для сборки регулируемого блока питания…
Подробнее
При торможении шагового двигателя в динамическом режиме торможение осуществляется за счет подачи напряжения на соответствующую катушку. На практике это приводит к блокировке оси двигателя в одной точке, но вызывает значительное потребление тока и нагрев обмоток.
Торможение в статическом режиме осуществляется путем отключение питания двигателя. При этом происходит минимальное потребление тока (состояние покоя), но при этом ось двигателя может свободно провернуть.
Все изменения в конфигурации контроллера, сделанные с помощью перемычек 1/0,5 и ST/DY, будут активны только после сброса напряжения питания.
Схема в Proteus:
Скачать прошивку и модель в Proteus (16,3 KiB, скачано: 925)
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров.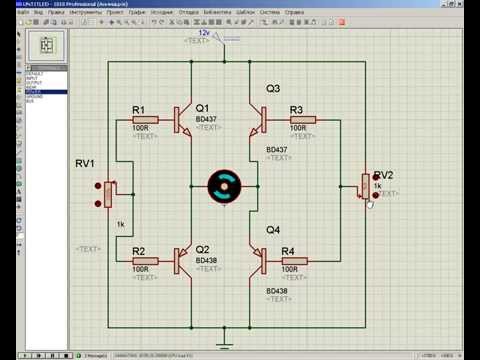 ..
..
Подробнее
Categories Измерение и контроль Tags Attiny261, L293D, proteus, Шаговый двигатель
Отправить сообщение об ошибке.
Схема привода шагового двигателя
в Proteus ISIS
Теперь мы увидим, как спроектировать схему привода шагового двигателя в Proteus ISIS. Шаговые двигатели обычно бывают двух типов…
Отделы:
Программное обеспечение:
Привет друзья, надеюсь, что вы все здоровы, богаты и мудры. Сегодняшняя тема посвящена управлению шаговым двигателем. В прошлом посте мы видели, как управлять двигателем постоянного тока в Proteus, а теперь мы увидим, как спроектировать схему привода шагового двигателя в Proteus ISIS.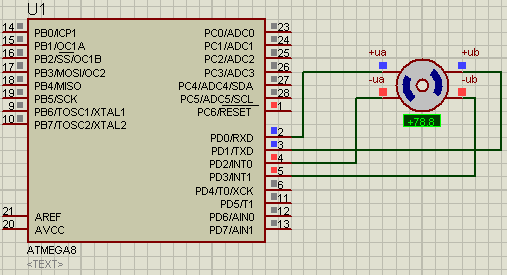 Шаговые двигатели обычно бывают двух типов, и основное различие между ними заключается в количестве проводов, используемых для управления ими. В основном шаговые двигатели используют 6 проводов для управления, но немногие из них также имеют 4 провода для управления. Сегодня мы рассмотрим 6-проводной шаговый двигатель.
Шаговые двигатели обычно бывают двух типов, и основное различие между ними заключается в количестве проводов, используемых для управления ими. В основном шаговые двигатели используют 6 проводов для управления, но немногие из них также имеют 4 провода для управления. Сегодня мы рассмотрим 6-проводной шаговый двигатель.
В шаговом двигателе есть электромагниты, которые поляризуются, когда мы подаем на них напряжение, и деполяризуются, когда мы снимаем напряжение. Эти электромагниты действуют как статер, и когда одна сторона намагничивается, она притягивает к себе ротор, а затем нам нужно намагнитить другую сторону и размагнитить предыдущую, и таким образом, если последовательность правильная, двигатель начинает двигаться.
Схема привода шагового двигателя в Proteus ISIS
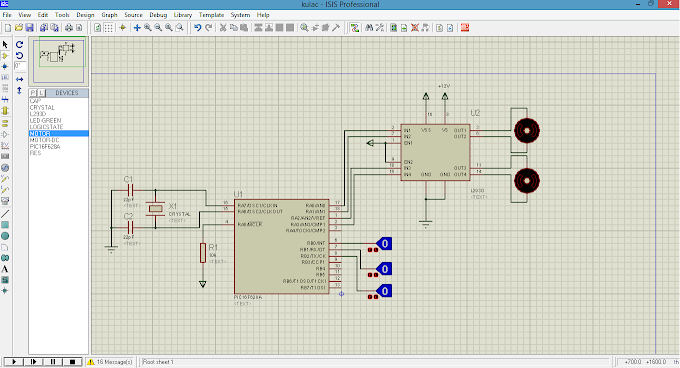
- Прежде всего, добавьте в рабочую область два следующих компонента из библиотеки Proteus.
- Теперь спроектируйте схему, как показано на рисунке ниже:
- Эта схема предназначена только для понимания.
 Теперь я добавил четыре состояния в схему, когда я делаю любое состояние, статор намагничивается, и ротор двигателя притягивается к этому статору и начинает двигаться.
Теперь я добавил четыре состояния в схему, когда я делаю любое состояние, статор намагничивается, и ротор двигателя притягивается к этому статору и начинает двигаться. - В приведенной ниже серии изображений я показал движение двигателя по часовой стрелке.
 Теперь я добавил четыре состояния в схему, когда я делаю любое состояние, статор намагничивается, и ротор двигателя притягивается к этому статору и начинает двигаться.
Теперь я добавил четыре состояния в схему, когда я делаю любое состояние, статор намагничивается, и ротор двигателя притягивается к этому статору и начинает двигаться.- Теперь, как вы можете видеть из приведенной выше последовательности изображений, двигатель движется по часовой стрелке, когда я подаю напряжение по часовой стрелке.
- Теперь, если я изменю порядок подачи напряжения, двигатель также изменит свое направление и будет двигаться против часовой стрелки.
- Скорость двигателя будет зависеть от скорости этого последовательного напряжения. Если вы подаете эти напряжения с задержкой, двигатель будет двигаться медленно, а если вы применяете их быстро и непрерывно, двигатель будет вращаться довольно быстро, т.е. скорость вращения двигателя увеличится.
Управление шаговым двигателем с помощью микроконтроллера
- Теперь, чтобы управлять этим двигателем с помощью шагового двигателя, просто соедините эти провода с четырьмя контактами микроконтроллера и подайте последовательное напряжение в программе, и двигатель будет работать достаточно плавно.
- Видео управления шаговым двигателем с микроконтроллером скоро выложу в этом посте.

Вот и все на сегодня, и я надеюсь, что теперь у вас есть идея, как спроектировать схему привода шагового двигателя в Proteus ISIS. В следующем посте мы рассмотрим, как спроектировать схему привода серводвигателя в Proteus ISIS. Так что, надеюсь, встретимся в следующем посте. Заботиться.
JLBCB — прототип 10 печатных плат за 2 доллара США (любой цвет)
Китайское крупное предприятие по производству прототипов печатных плат, более 600 000 клиентов и онлайн-заказ
Повседневная
Как получить денежный купон PCB от JLPCB: https://bit.ly/2GMCH9w
-Автор сайта
седзаиннасир
Я Сайед Заин Насир, основатель The Engineering Projects (TEP). я
я
программист с 2009 года, до этого я просто искал вещи, делал небольшие проекты, а теперь делюсь своим
знания через эту платформу. Я также работаю фрилансером и сделал много проектов, связанных с
программирование и электрические схемы. Мой профиль Google+Подписаться
Присоединиться
Схема привода шагового двигателя
в Proteus ISIS
Привет друзья, желаю всем вам быть здоровыми, богатыми и мудрыми. Сегодняшняя тема посвящена управлению шаговым двигателем. В прошлом посте мы видели, как управлять двигателем постоянного тока в Proteus, а теперь мы увидим, как спроектировать схему привода шагового двигателя в Proteus ISIS. Шаговые двигатели обычно бывают двух типов, и основное различие между ними заключается в количестве проводов, используемых для управления ими.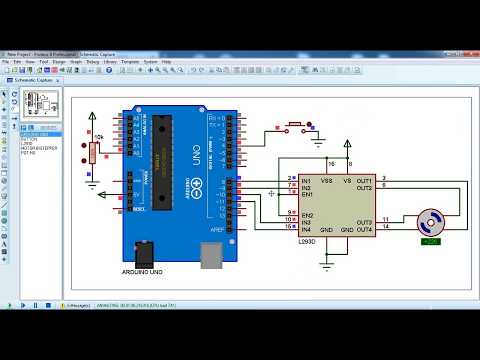 В основном шаговые двигатели используют 6 проводов для управления, но немногие из них также имеют 4 провода для управления. Сегодня мы рассмотрим 6-проводной шаговый двигатель.
В основном шаговые двигатели используют 6 проводов для управления, но немногие из них также имеют 4 провода для управления. Сегодня мы рассмотрим 6-проводной шаговый двигатель.
В шаговом двигателе есть электромагниты, которые поляризуются, когда мы подаем на них напряжение, и деполяризуются, когда мы снимаем напряжение. Эти электромагниты действуют как статер, и когда одна сторона намагничивается, она притягивает к себе ротор, а затем нам нужно намагнитить другую сторону и размагнитить предыдущую, и таким образом, если последовательность правильная, двигатель начинает двигаться.
Схема привода шагового двигателя в Proteus ISIS
- Прежде всего, добавьте в рабочую область два следующих компонента из библиотеки Proteus.
- Теперь спроектируйте схему, как показано на рисунке ниже:
- Эта схема предназначена только для понимания. Теперь я добавил четыре состояния в схему, когда я делаю любое состояние, статор намагничивается, и ротор двигателя притягивается к этому статору и начинает двигаться.
- В серии изображений ниже я показал движение двигателя по часовой стрелке.

- Теперь, как вы можете видеть из приведенной выше последовательности изображений, двигатель движется по часовой стрелке, когда я подаю напряжение по часовой стрелке.
- Теперь, если я изменю порядок подачи напряжения, двигатель также изменит свое направление и будет двигаться против часовой стрелки.
- Скорость двигателя будет зависеть от скорости этого последовательного напряжения. Если вы подаете эти напряжения с задержкой, двигатель будет двигаться медленно, а если вы применяете их быстро и непрерывно, двигатель будет вращаться довольно быстро, т.е. скорость вращения двигателя увеличится.
Управление шаговым двигателем с помощью микроконтроллера
- Теперь, чтобы управлять этим двигателем с помощью шагового двигателя, просто соедините эти провода с четырьмя контактами микроконтроллера и подайте последовательное напряжение в программе, и двигатель будет работать достаточно плавно.