Содержание
Схема подключения биполярного шагового двигателя
Для управления шаговыми двигателями используют специальные устройства — драйверы шаговых двигателей. Популярный драйвер шагового двигателя А работает от напряжения В и может обеспечить ток до 1 А на фазу без радиатора. Рисунок 4. Схема подключения для управления скоростью и направлением движения. База знаний. Вконтакте Instagram YouTube.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Шаговые двигатели и особенности их применения
- Схемы подключения шаговых двигателей.
- Шаговый двигатель
- Драйвер шагового двигателя A4988
- Как подключить шаговый двигатель с 6 выводами
- Главное меню
- Шаговые двигатели (подробный разбор 4 типов)
- Как работает шаговый электродвигатель?
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003

ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Подключаем униполярные шаговые двигатели
Шаговые двигатели и особенности их применения
В этой статье мы поговорим о шаговых двигателях в проектах ардуино. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Схема работы шаговых двигетелй, способ подключения к Arduino и примеры скетчей — все это вы найдете в этой статье.
Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Схема работы шаговых двигетелй, способ подключения к Arduino и примеры скетчей — все это вы найдете в этой статье.
Шаговый двигатель — это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора.
Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса. Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию.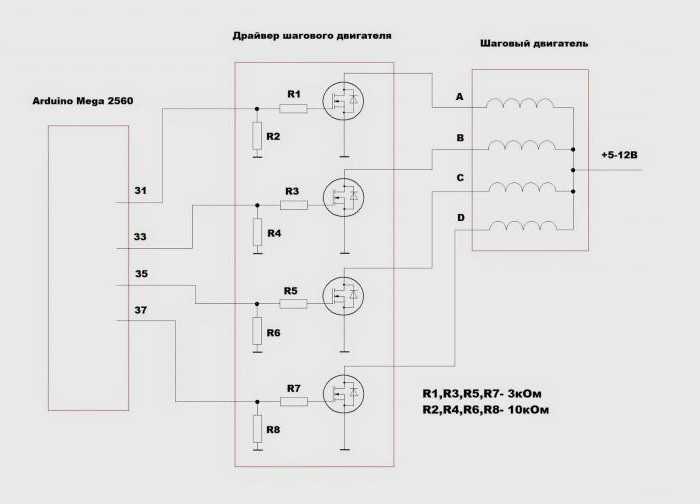
Работа двигателя осуществляется следующим образом — в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота шаги , направление движения задаются в программе для микроконтроллера.
Драйвер — это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйвер LN. Работа двигателя в биполярном режиме имеет несколько преимуществ:.
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия — подключение к источнику питания, отключение.
Для такой коммутации используется схема-мост с четырьмя ключами. Самым распространенным драйвером является микросхема LN. Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера LN состоит из микросхемы LN, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов. Этот драйвер обеспечивает все необходимые функции и режимы.
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера LN состоит из микросхемы LN, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов. Этот драйвер обеспечивает все необходимые функции и режимы.
В качестве платы будет использоваться Arduino Uno. Схема подключения изображена на рисунке ниже. В данном случае используются цифровые контакты Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино. Подключение биполярного двигателя через драйвер L выглядит похожим образом.
В качестве шагового двигателя используется Nema Nema 17 — биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия хHSхххА мотора является универсальной.
Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах. Основные функции в этой библиотеке:.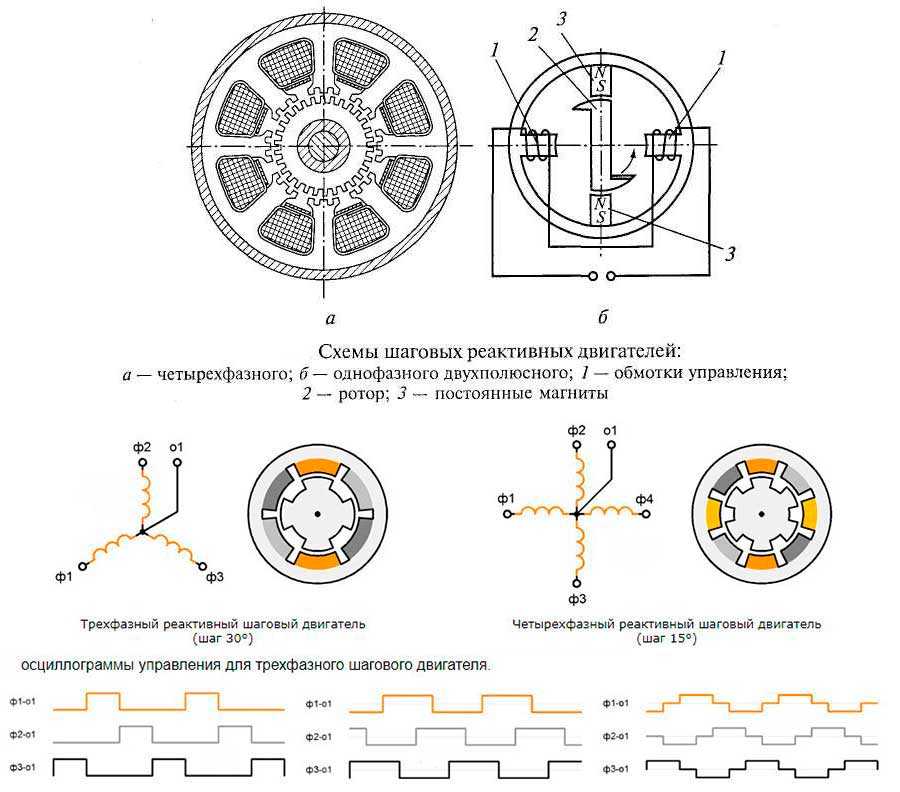 В наборе примеров библиотеки Stepper. В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя.
В наборе примеров библиотеки Stepper. В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя.
Мы также рассмотрели пример написания скетча, использующего встроенную библиотеку Stepper. Как видим, ничего особенно сложного в работе с шаговыми моторами нет и мы рекомендуем вам обязательно поэкспериментировать самостоятельно и попробовать включить его в свой проект Arduino. Любая разработка начинается с выбора компонентов.
При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя. Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1. Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере.
То вы скорее всего будите использовать двигателя из принтеров. Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам Ln и СNC shield.
У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам Ln и СNC shield.
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель. Расположение обмотки для данного двигателя вот такое. Если у двигателя 5 выводов, это униполярный шаговый двигатель. Вот так выгладит его схема. Наши драйвера рассчитаны на двигателя с 4 выводами.
Как быть? Как их подключить? Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки R — именно оно приведено в каталоге.
При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза 2R. Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Во втором случае момент более стабилен на высоких частотах.
Во втором случае момент более стабилен на высоких частотах.
Параметры ШД при таком подключении соответствуют заявленным в datasheet, момент, ток , момент более стабилен на высоких частотах. Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно. Подключение А — шаговик работает с характеристиками, заявленными в описании момент, ток , момент более стабилен на высоких частотах. Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают.
Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже. Настраивать СNC shield будем в следующей статье.
Не пропустите! Вернуться в раздел: Проекты на Arduino Дата публикации 15 июня , Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое. На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов.
На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов.
Вот технологии быстро растут. И во всех этих аппаратов невозможно без шагового двигателя ШД. Доброго дня уважаемые друзья, коллеги, будущие партнёры и гости. Я снова на связи. С вами Гридин Семён. Сегодня мы рассмотрим интересную тему. Это соединение шагового двигателя с популярной электронной платой Arduino. Так что готовьте чай и читайте статью. Для практических задач с точным перемещением объекта обязательно требуется ШД.
Это мотор, который перемещает свой вал в зависимости от заданных шагов в программе контроллера. Чаще всего их применяют в станках ЧПУ, робототехнике, манипуляторах, 3D-принтерах. Он достаточно дешёвый, прост в сборке и легко писать программу.
В 4-шаговом режиме он может совершать шагов, в 8-шаговом шагов. Питание 5 В, ток потребления мА. Передаточное число , то есть один шаг он совершит на 5, градусов.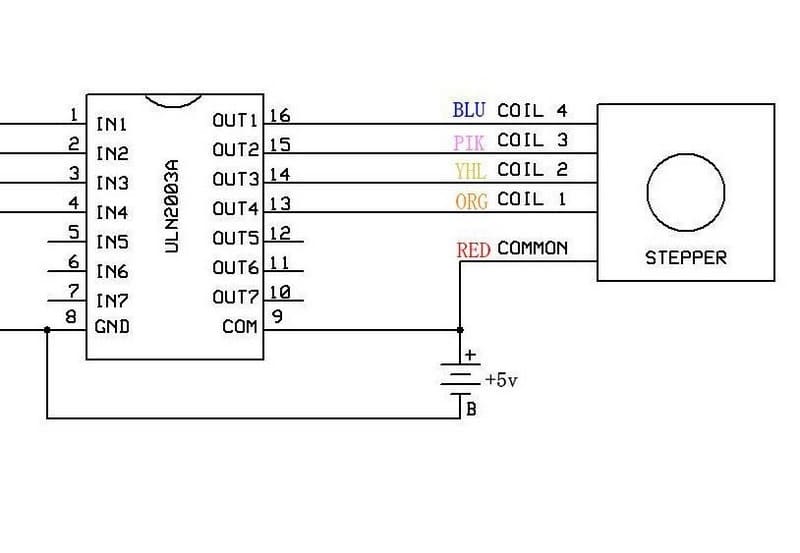 Крутящий момент составляет 34 мН. Его главным преимуществом является дешевизна и простота. Прилагаю спецификацию:.
Крутящий момент составляет 34 мН. Его главным преимуществом является дешевизна и простота. Прилагаю спецификацию:.
Схемы подключения шаговых двигателей.
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т. Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Шаговые двигатели (stepper motors или stepping motors) — это одна из .. вариант, так как в первоисточнике имеются ошибки в подключении IC1. Как уже . Схема платы управления для мощного биполярного шагового двигателя.
Шаговый двигатель
В статье рассматриваются типы шаговых двигателей, особенности их применения и схемы несложных устройств управления, позволяющие оценить возможности и освоить этот тип двигателей на практике.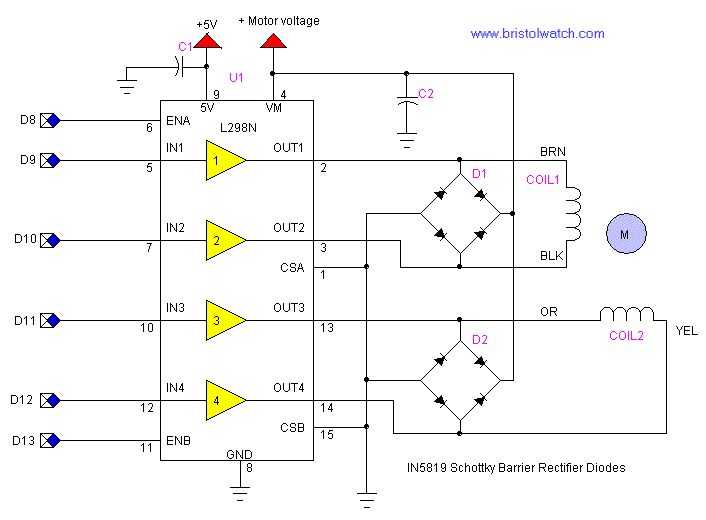 Статья написана на основании опыта автора по использованию шаговых двигателей в робототехнике. А именно для систем синхронной связи на постоянном токе. Скорость вращения шагового двигателя определяется только частотой следования импульсов управления. Для устройств на основе шаговых двигателей, как правило, не требуется концевых выключателей или каких-то конечных сенсоров. При этом подсчитываются импульсы ЭДС, генерируемые обмоткой двигателя при вращении его ротора внешней силой. Таким образом, момент, развиваемый двигателем, зависит только от параметров обмоток. Статор гибридного двигателя также имеет зубцы, обеспечивая большее количество эквивалентных полюсов, на которых расположены обмотки. В униполярном двигателе рис. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, переключением ее половинок.
Статья написана на основании опыта автора по использованию шаговых двигателей в робототехнике. А именно для систем синхронной связи на постоянном токе. Скорость вращения шагового двигателя определяется только частотой следования импульсов управления. Для устройств на основе шаговых двигателей, как правило, не требуется концевых выключателей или каких-то конечных сенсоров. При этом подсчитываются импульсы ЭДС, генерируемые обмоткой двигателя при вращении его ротора внешней силой. Таким образом, момент, развиваемый двигателем, зависит только от параметров обмоток. Статор гибридного двигателя также имеет зубцы, обеспечивая большее количество эквивалентных полюсов, на которых расположены обмотки. В униполярном двигателе рис. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, переключением ее половинок.
Драйвер шагового двигателя A4988
Биполярный шаговый двигатель отличается от униполярного шагового двигателя тем, что полярность обмоток изменяется во время коммутации. Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом. При коммутации полумосты прикладывают к концам обмоток положительное или отрицательное напряжение.
Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом. При коммутации полумосты прикладывают к концам обмоток положительное или отрицательное напряжение.
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами дискретно. Полный оборот ротора состоит из нескольких шагов.
Как подключить шаговый двигатель с 6 выводами
Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух реже четырех обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения. В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции.
Главное меню
Теория и практика. Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок. Уроки, книги, видео. Профессиональное обучение и развитие. Сайт для электриков и домашних мастеров, а также для всех, кто интересуется электротехникой, электроникой и автоматикой. Категории: Электродвигатели и их применение , Схемы на микроконтроллерах Количество просмотров: Комментарии к статье: 0. Ардуино и шаговый двигатель: основы, схемы, подключение и управление. Шаговые двигатели используют для управления положением чего-либо, или для вращения рабочего узла с заданной скорости и на заданный угол.
Виды шаговых двигателей ШД по конструкции обмоток делят на три основных группы по схеме подключения обмоток: 1. Биполярные. 2. Униполярные.
Шаговые двигатели (подробный разбор 4 типов)
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора.
Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора.
Как работает шаговый электродвигатель?
ВИДЕО ПО ТЕМЕ: Переделка шагового двигателя в обычный биполярный
С помощью драйвера LN подключим к плате Ардуино биполярный шаговый двигатель. Для управления будем использовать программы из предыдущих уроков для униполярных двигателей. У биполярного шагового двигателя две обмотки, по одной для каждой фазы. Если для управления униполярным двигателем достаточно 4 ключей, замыкающих выводы на землю, то биполярный привод требует более сложной коммутации обмоток.
Предшественником шагового двигателя является серводвигатель. Шаговые импульсные двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи.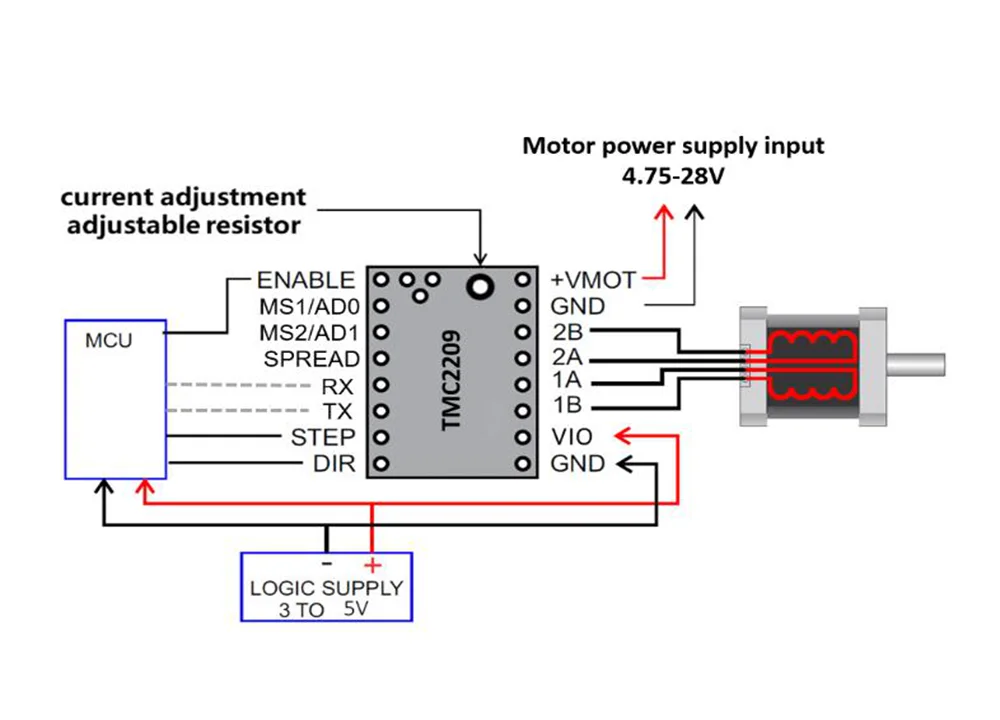
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают. Это означает, что он преобразует электрическую энергию в механическую. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами отсюда и их название.
Перейти к содержимому. У вас отключен JavaScript. Некоторые возможности системы не будут работать. Пожалуйста, включите JavaScript для получения доступа ко всем функциям.
Биполярный шаговый двигатель типоразмер 86 мм, цена в Рефит
Биполярные
Биполярный шаговый двигатель типоразмер 86 мм
 org/ListItem»>
org/ListItem»>Главная
Шаговый двигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками электрический двигатель, в котором подача электрического тока на одну из обмоток приводит к тому, что его ротор фиксируется в строго определённом положении. Последовательное подключение обмоток приводит к вращательному движению на заданный угол. Благодаря этому, угол поворота ротора зависит от количества последовательных переключений обмоток, а скорость вращения ротора равна частоте переключения обмоток умноженной на угол поворота ротора за одно переключение.
Наибольшее распространение получили двухфазные(биполярные) шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об).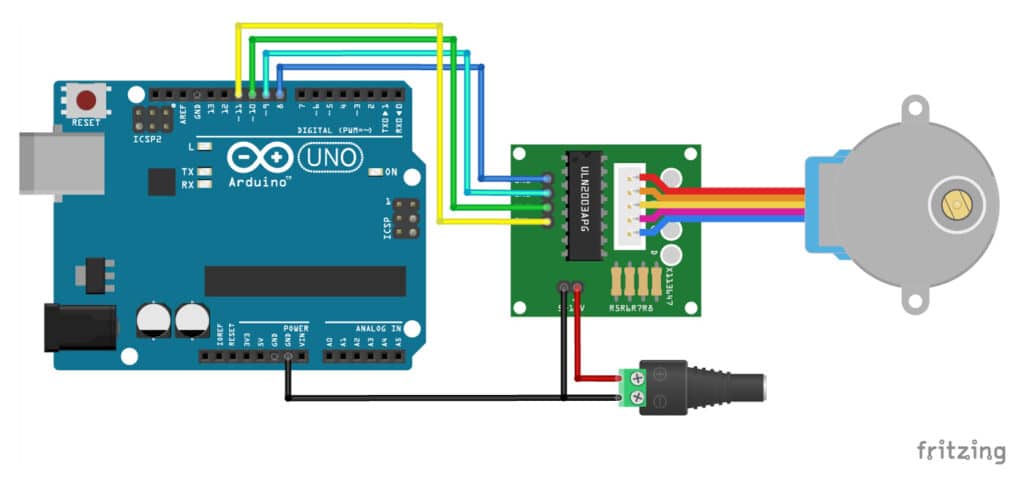 Производитель гарантирует точность шага без нагрузки до 5 % от величины шага. Шаговые двигатели, в зависимости от конструкции и режима управления могут выполненять от доли оборота в секунду до нескольких тысяч оборотов в секунду.
Производитель гарантирует точность шага без нагрузки до 5 % от величины шага. Шаговые двигатели, в зависимости от конструкции и режима управления могут выполненять от доли оборота в секунду до нескольких тысяч оборотов в секунду.
Преимущества и недостатки шагового двигателя:
Преимущества:
- Главное преимущество шаговых приводов — точность. При подаче тока в обмотки шаговый двигатель повернется строго на определенный угол. Ошибка позиционирования в пределах 3 — 5% шага и эта ошибка не накапливается от шага к шагу.
- Зависимость оборотов двигателя от дискретных импульсов позволяет управлять двигателем без обратной связи.
- Стоимость шаговых приводов, в среднем в 1,5-2 раза дешевле сервоприводов. Шаговый привод, как недорогая альтернатива сервоприводу, наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Недостатки:
- Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения.
 Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ.
Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ. - Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага.
 Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ.
Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ.
Основные характеристики:
- Погрешность шага — 5% (полный шаг, без нагрузки)
- Погрешность сопротивления ±10%
- Погрешность индуктивности ±20%
- Максимальная температура 80º С max (номинальный ток, 2 фазы)
- Рабочий диапазон температур от -20º С до +50ºС
- Сопротивление изоляции 100МΩ Min., 500VDC
- Диэлектрическая стойкость 500VAC в одну минуту
- Радиальное биение вала 0,02 мм (при нагрузке 450 г)
- Осевое биение вала 0,08 мм (при нагрузке 450 г)
| Модель | Шаг (угол поворота), ° | Номинальное напряжение, V | Ток/ фаза, АА | Сопротивление фаза, Ω | Индуктивность фаза, mH | Момент удержания, кг. 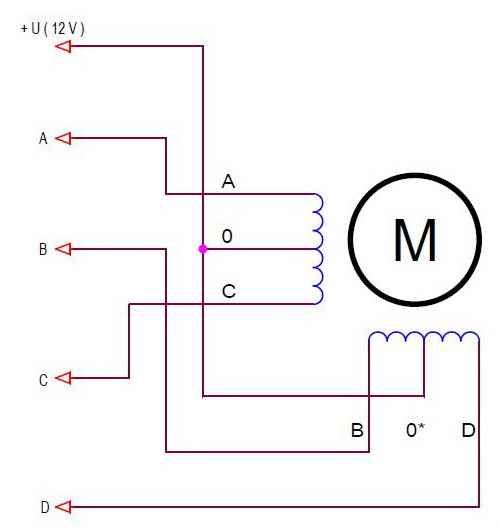 смм смм | Кол-во выходов | Масcа, кг | Цена за шт. с НДС, грн.** |
|---|---|---|---|---|---|---|---|---|---|
| JK86HS115-6004 | 1,8 | – | 6 | 0,6 | 6 | 87 | 4 | 3,8 | 2270.12 |
| JK86HS155-6004 | 1,8 | – | 6 | 0,68 | 9 | 130 | 4 | 5,4 | 3087.88 |
| JK86HS78-5504 | 1,8 | – | 5,5 | 0,46 | 4 | 46 | 4 | 2,3 | 1789.42 |
| 86J1880-842 | 1,8 | – | 4,2* | 0,58* | 4* | 45* | 8 | 2,3 | 2161.44 |
| 86J18101-450 | 1,8 | – | 5,0 | 0,58 | 4,2 | 60 | 4 | 3,25 | 3460. 66 66 |
| 86J18118-460 | 1,8 | – | 6,0 | 0,52 | 4,8 | 82 | 4 | 3,6 | 3112.20 |
| 86J18118-460(K)-38-14 | 1,8 | – | 6,0 | 0,28 | 3,0 | 85 | 4 | 3,6 | 3325.00 |
| 86J18156-845 | 1,8 | – | 6,0* | 0,72* | 5,5* | 120* | 8 | 5,4 | 4103.24 |
| SM86HT80-5504A | 1,8 | 6,0 | 5,5 | 0,46 | 4 | 46 | 4 | 2,3 | |
| SM86HT80-5504B | 1,8 | 6,0 | 5,5 | 0,46 | 4,0 | 46 | 4 | 2,3 | 2396.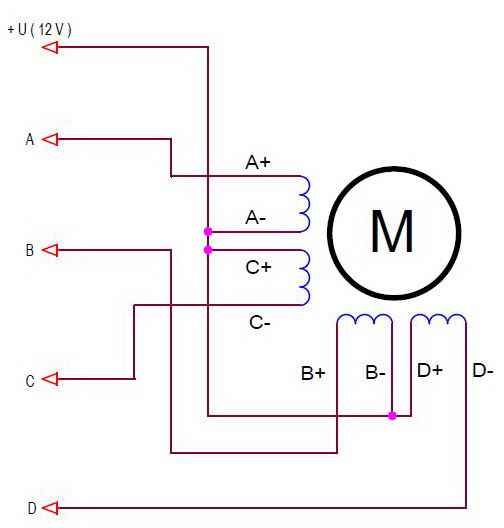 66 66 |
| SM86HT80-4208A | 1,8 | 3,0 | 6,0* | 0,38* | 3,4* | 46* | 8 | 2,3 | 1963.08 |
| SM86HT118-6004A | 1,8 | 3,5 | 6 | 0,6 | 6,5 | 87 | 4 | 3,8 | |
| SM86HT118-6004B | 1,8 | 5,3 | 6,0 | 0,6 | 6,5 | 87 | 4 | 3,8 | 3502.46 |
| SM86HT156-6204A | 1,8 | 3,5 | 6,2 | 0,75 | 9 | 122 | 4 | 5,4 | |
| CW86BHH94-400B-28B АКЦИЯ | 1,8 | 1,8 | 4 | 0,45 | 3,6 | 36 | 4 | 2,9 | 2857.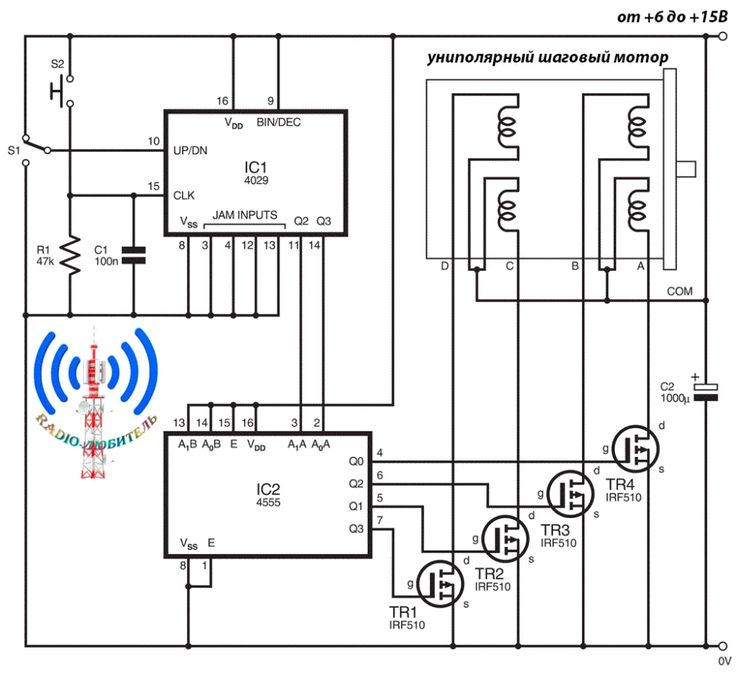 60 2300 60 2300 |
| CW86BHh200-500-32J | 1,8 | 2,5 | 5 | 0,5 | 4,2 | 52 | 4 | 3 |
* – значение действительны при биполярном параллельном способе подключения двигателя.
** – указанные цены не являются публичной офертой, носят исключительно информационный характер и могут отличаться от действительных цен.
Скачать:
- каталог шаговых двигателей JMC
- каталог шаговых двигателей SM
- каталог шаговых двигателей CW
- схема подключения 8 выводов
Геометрические размеры:
| Модель | LC | L | LA | LB | LE | LF | LZ | LR | LT | S | QL | F | V | QK | U | W |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| JK86HS115-6004 | 85,85 | 115 | 69,5 | 73 | 1,6 | 9,5 | 6,5 | 31,75 | – | 12,7 | – | – | – | 25 | 14,7 | 5 |
| JK86HS155-6004 | 85,85 | 155 | 69,5 | 73 | 1,6 | 9,5 | 6,5 | 31,75 | 30 | 15,875 | – | – | – | 25 | 17,88 | 5 |
| SM86HT80-5504A | 85,85 | 80 | 69,5 | 73 | 1,6 | 9,5 | 6,5 | 31,75 | – | 12,7 | 25 | – | – | – | – | – |
| SM86HT80-5504B | 85,85 | 80 | 69,5 | 73 | 1,6 | 9,5 | 6,5 | 31,75 | 30 | 12,7 | 25 | – | – | – | – | – |
| SM86HT80-4208A | 85,85 | 80 | 69,5 | 73 | 1,6 | 9,5 | 6,5 | 31,75 | – | 12,7 | 25 | – | – | – | – | – |
| SM86HT118-6004A | 85,85 | 118 | 69,5 | 73 | 1,6 | 9,5 | 6,5 | 31,75 | – | 12,7 | 25 | – | – | – | – | – |
| SM86HT118-6004B | 85,85 | 118 | 69,5 | 73 | 1,6 | 9,5 | 6,5 | 31,75 | 30 | 12,7 | 25 | – | – | – | – | – |
| SM86HT156-6204A | 85,85 | 156 | 69,5 | 73 | 1,6 | 9,5 | 6,5 | 31,75 | – | 15,875 | – | – | – | 25 | 17,875 | 5 |
| CW86BHH94-400B-28B | 86 | 94 | 69,6 | 60 | 2 | 9,5 | 6,5 | 27,5 | – | 14 | 20 | – | 13 | – | — | – |
| CW86BHh200-500-32J | 86 | 100 | 69,6 | 73 | 2 | 9,5 | 6,5 | 31,75 | – | 14 | – | – | – | 25 | 16 | 5 |
| JK86HS78-5504 | 85. 85 85 | 80 | 69,5 | 73 | 1,6 | 9,5 | 6,5 | 31,75 | – | 12,7 | 25 | – | – | 25 | – | – |
| 86J1880-842 | 86 | 79 | 69,58 | 73 | 1,6 | – | 6,5 | 32 | – | 12,7 | 25 | – | – | 25 | – | – |
| 86J18101-450 | 86 | 101 | 69,58 | 73 | 1,6 | – | 6,5 | 32 | – | 12,7 | – | – | – | 25 | – | 5 |
| 86J18118-460 | 86 | 112 | 69,58 | 73 | 1,6 | – | 6,5 | 32 | – | 12,7 | – | – | – | 25 | – | 5 |
| 86J18118-460(K)-38-14 | 86 | 112 | 69,58 | 73 | 1,6 | – | 6,5 | 32 | – | 14 | – | – | – | 25 | – | 5 |
| 86J18156-845 | 86 | 156 | 69,58 | 73 | 1,6 | – | 6,5 | 32 | – | 15,875 | – | – | – | 25 | – | 5 |
Похожие товары
Биполярный шаговый двигатель типоразмер 42 мм
Биполярный шаговый двигатель типоразмер 110 мм
Биполярный шаговый двигатель типоразмер 60 мм
Copyright © 2023 refit.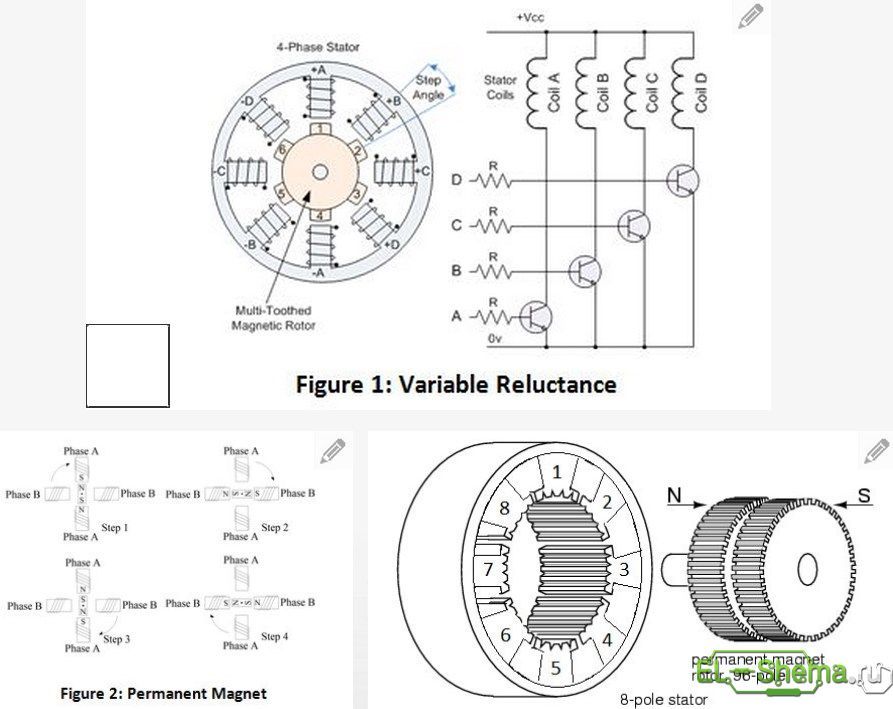 com.ua All rights reserved.
com.ua All rights reserved.
Created by Siter.in.ua.
Соглашения о подключении шаговых двигателей
— Caggius Interweb
По некоторым причинам соглашения об именах контактов шаговых двигателей, физические соединения и цвета проводов сильно различаются у разных производителей. Нет единого стандарта! Тем не менее, в конце концов, заставить их работать довольно просто.
Если, как и я, вы переходите с материнской платы ANet A8 на SKR V1.3, то вы, вероятно, можете пропустить весь этот раздел и считать само собой разумеющимся, что кабели двигателя совместимы и это зависит от вашего выбора платы драйвера Stepstick (например, TMC2208), то вам, вероятно, просто нужно настроить Marlin на изменение направления оси двигателя.
Тем не менее, если когда-нибудь понадобится стандарт….
- Поставщики называют 2 катушки двигателя A и B или 1 и 2, а затем маркируют концы каждой катушки, используя другую пару 1 и 2 или A и B. Например:
a) DRV8825 использует катушки двигателя A и B, каждая с двумя проводами 1 и 2
, т. е. A1 и A2 для первой катушки
b) A4988 использует катушки двигателя 1 и 2, каждая с двумя проводами A и B
, т. е. 1A и 1B, для первой катушка.
c) Драйверы TMC используют катушки двигателя M1 и M2, каждая с двумя проводами A и B
т.е. M2A&M2B для первой катушки. - , как правило, используют распиновку ступенек A4988 для заказа разъема двигателя, поскольку это позволяет избежать пересечения проводов (дорожек платы). Но разъем JST можно припаять к плате, повернув на 180 градусов или просто перевернув на обратной стороне платы.
- поставляются с 4-контактными или 6-контактными разъемами, окрашенными в черный, зеленый, синий и красный цвета — кажется, что они соответствуют стандартному порядку цветов на конце платы, но соединения на стороне двигателя могут различаться.
- Разъемы JST и Dupont, используемые на обоих концах кабеля, не имеют определенного стандартного контакта 1. Несмотря на то, что JST является ручным разъемом (его можно подключать только в одной ориентации), разные поставщики будут называть противоположные концы разъема контактом 1.
- Шаговый двигатель может поставляться либо с 6-контактным разъемом JST, либо с предварительно подключенным 6-жильным кабелем, который не соответствует цветовой схеме проводки, используемой в 3D-принтерах
- Некоторые шаговые двигатели будут иметь все 6 контактов, другие не будут подключать центральные выводы катушки. К счастью, центральные отводы на самом деле не используются драйверами шаговых двигателей 3D-принтеров, так что это не проблема.
 е. A1 и A2 для первой катушки
е. A1 и A2 для первой катушки Производители плат
Кабели двигателя
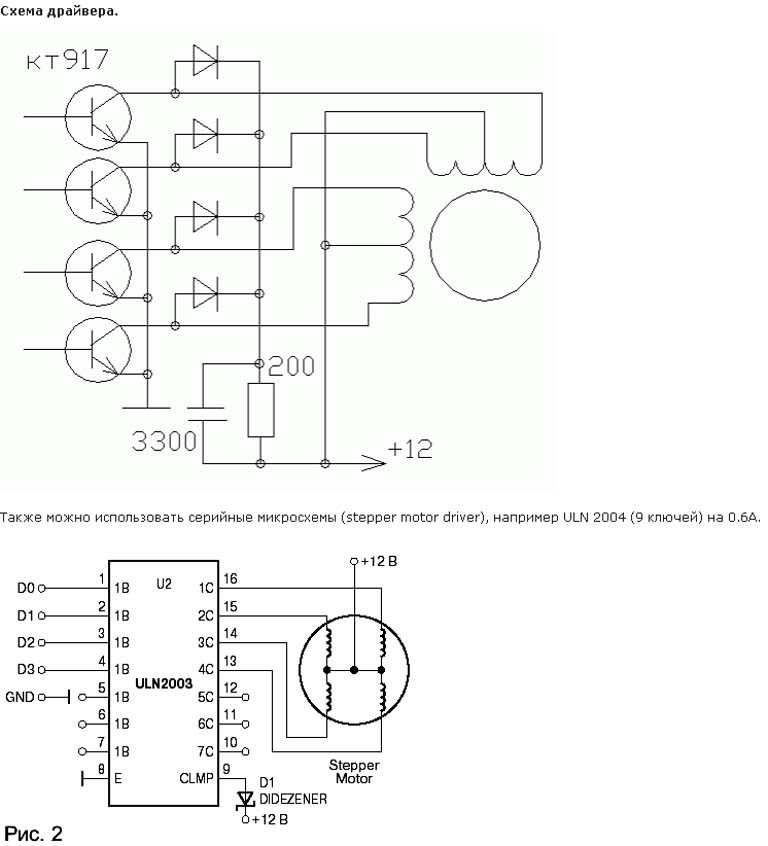
Рисунок: Выходы материнской платы
Таким образом, кабель шагового двигателя обычно имеет 6-контактный разъем JST HX 2,54 мм (0,1 дюйма) или 6-контактный разъем JST-4-контактный разъем Dupont.
Рисунок: подключение двигателя .
К счастью, заставить их работать относительно просто. Чтобы заставить двигатель вращаться, вам просто нужно использовать омметр или зуммер, чтобы убедиться, что катушки подключены так, что одна катушка подключена к контактам 1 и 2, а другая катушка к контактам 3 и 4 на разъеме на конце материнской платы.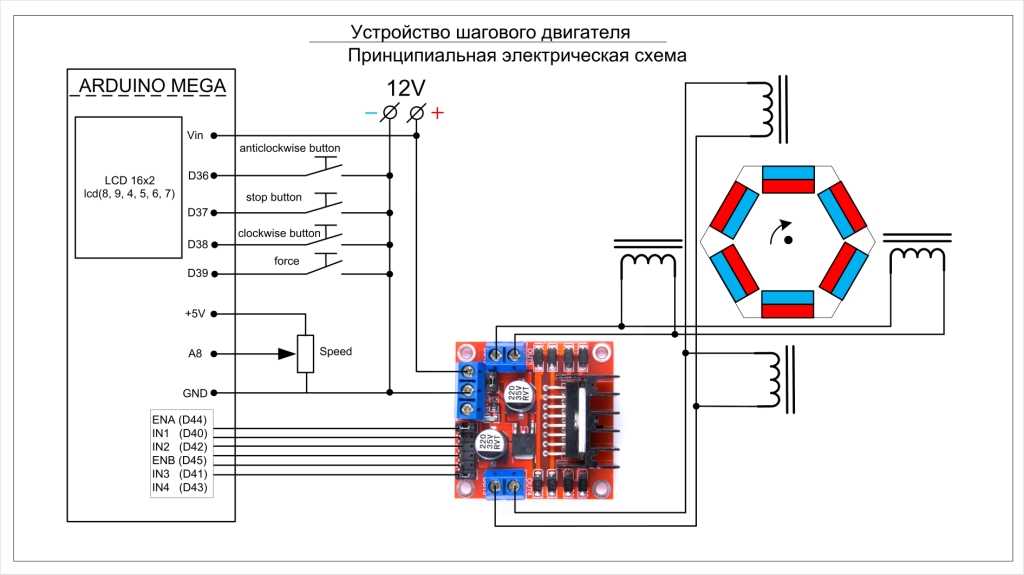 Однако нет никакой гарантии, что это заставит двигатель вращаться в правильном направлении. Чтобы добиться этого, вам нужно попробовать поменять местами провода, как показано на этой странице RepRap
Однако нет никакой гарантии, что это заставит двигатель вращаться в правильном направлении. Чтобы добиться этого, вам нужно попробовать поменять местами провода, как показано на этой странице RepRap
https://reprap.org/wiki/Stepper_wiring 9.0003
Основные платы формата Rep Rap и A8 V1.5 основаны на совместимости с A4988, т. е. выводы расположены в порядке 2B, 2A, 1A, 1B.
Нравится:
Нравится Загрузка…
Искать:
Распиновка проводов обмотки шагового двигателя Minebea
Страница в разработке
Используйте информацию на свой страх и риск!!!
Гибридные шаговые двигатели
| Модель Номер | Катушка Диаграмма грамм Рис. | Модель Номер | Катушка Диам. грамм Рис. | |
| 14PM-M204 | А | 17PM-K316V | А | |
| 14PM-M206 | А | 17ПМ-К301В | А | |
| 16PY-Q207 | А | 17PM-K303V | А | |
| 16PY-Q204 | А | 17ПМ-К111В | А | |
| 16PU-M003 | А | 17ПМ-К101В | А | |
| 16PU-M006 | А | 17ПМ-К103В | А | |
| 17PM-K016V | А | 17PM-K402V | А | |
| 17PM-K017V | А | 17PW-M003 | А | |
| 17PM-K018V | А |
| Модель Номер | Катушка Диаметр- грамм Рис.  | Модель Номер | Катушка Диам. грамм Рис. | |
| 17ПС-М001В | А | 23LQ-C055V | А | |
| 17PU-H008V | А | 23LY-C001 | Б | |
| 17PU-H010V | А | 23LY-C002 | Б | |
| 17ПУ-х409В | А | 23LY-C201 | Б | |
| 17PU-h412V | А | 23LY-C202 | Б | |
| 17ПМ-К204ВТ | А | 23LY-C205 | Б | |
| 17PM-K018VT | А | 23LY-C301 | Б | |
| 17ПУ-х304ВТ | А | 23LY-C303 | Б | |
| 17PU-H018VT | А | 23LY-C305 | Б | |
| 23КМ-К379В | А | 34PM-C007 | С | |
| 23КМ-К032В | А | 34PM-C049 | С | |
| 23КМ-К716В | А | 34PM-C101 | С | |
| 23LQ-C202V | А | 34PM-C108 | С | |
| 23LQ-C309V | А |
Шаговые двигатели с постоянными магнитами
| Модель Номер | Катушка Диам. 
|