Содержание
Схема подключения шагового двигателя к драйверу
Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое. На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов. Вот технологии быстро растут. И во всех этих аппаратов невозможно без шагового двигателя ШД. Доброго дня уважаемые друзья, коллеги, будущие партнёры и гости.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
- Схемы подключения шаговых двигателей
- Главное меню
- Схемы управления шаговыми двигателями
- Драйвер шагового двигателя A4988
- Обратите внимание на следующие товары:
- Драйвер биполярных шаговых двигателей
- Советы для начинающих.
Arduino и шаговый двигатель Nema 17
- Шаговый двигатель 4 провода подключение
- Как работает шаговый электродвигатель?
 Arduino и шаговый двигатель Nema 17
Arduino и шаговый двигатель Nema 17ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: ШАГОВЫЙ ДВИГАТЕЛЬ ПРОСТОЙ ДРАЙВЕР ДЛЯ НЕГО
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
Перед подключением Nema 17, за плечами был определенный опыт работы с шаговиком 24byj48 даташит. Управлялся он и с помощью Arduino, и с помощью Raspberry pi, проблем не возникало. Основная прелесть этого двигателя — цена около 3 долларов в Китае. Причем, за эту сумму вы приобретаете двигатель с драйвером в комплекте.
Согласитесь, такое можно даже и спалить, не особо сожалея о содеянном. Теперь появилась задача поинтереснее. Управлять шаговым двигателем Nema 17 даташит. Данная модель от оригинального производителя реализуется по цене около 40 долларов.
Теперь появилась задача поинтереснее. Управлять шаговым двигателем Nema 17 даташит. Данная модель от оригинального производителя реализуется по цене около 40 долларов.
Китайские копии стоят раза в полтора-два дешевле — около долларов. Очень удачная модель, которая часто используется в 3D принтерах и CNC-проектах.
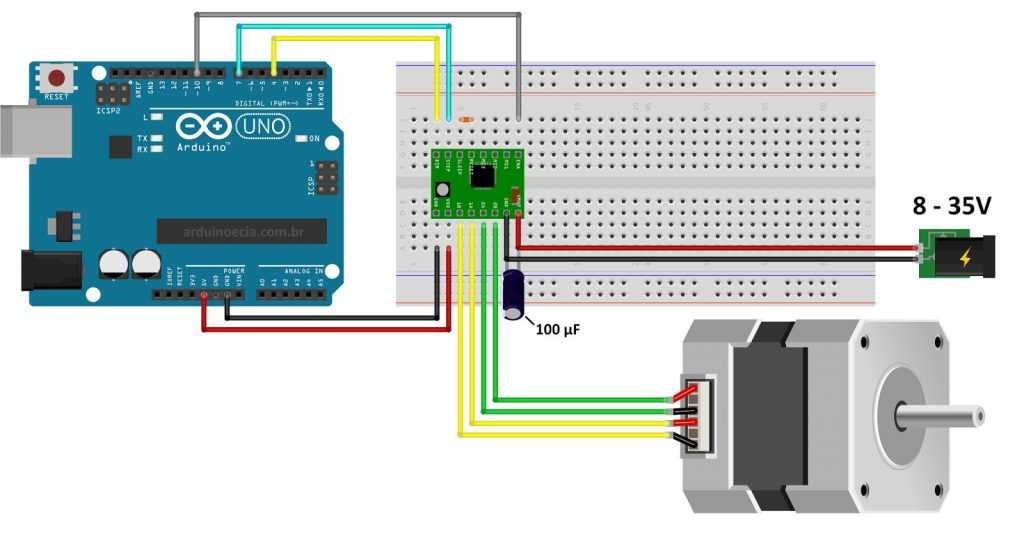
Первая возникшая проблема — как подобрать драйвер для этого двигателя. Силы тока на пинах Arduino для питания не хватит. Google подсказал, что для оживления Nema 17 можно использовать драйвер A от Poulou даташит. Кроме того, есть вариант использования микросхем LD. Но A считается более подходящим вариантом, так что на нем и остановились во избежание потенциальных проблем.
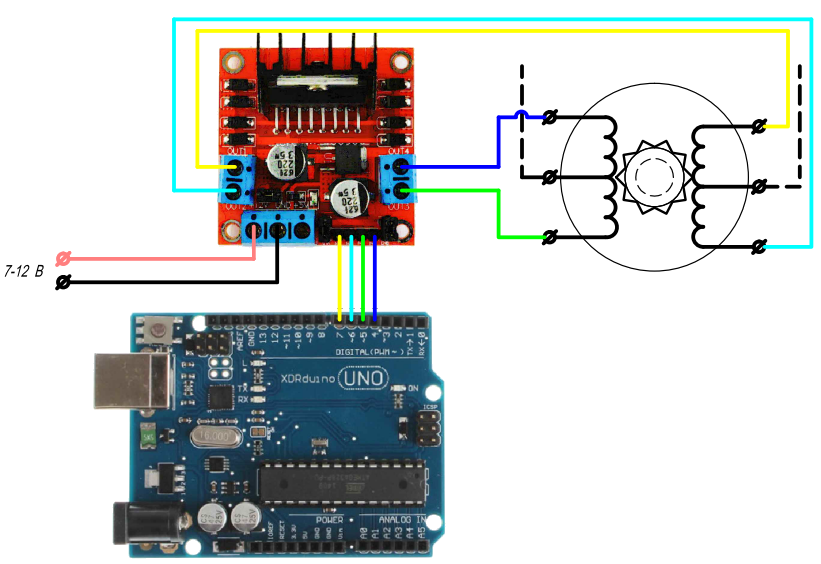
Подключение было реализовано на основании этой темы на Arduino форуме. Рисунок приведен ниже. Собственно, данная схема присутствует практически на каждом блоге-сайте, посвященном Arduino.
Плата была запитана от 12 вольтового источника питания. Но двигатель не вращался. Проверили все соединения, еще раз проверили и еще раз Наш 12 вольтовый адаптер не выдавал достаточной силы тока. В результате адаптер был заменен на 8 батареек АА. И двигатель начал вращаться!
В результате адаптер был заменен на 8 батареек АА. И двигатель начал вращаться!
Что ж, тогда захотелось перескочить с макетной платы на прямое подключение. И тут возникла. Когда все было распаяно, двигатель опять перестал двигаться. Не понятно до сих пор. Пришлось вернуться к макетной плате. И вот тут возникла вторая проблема. Стоит предварительно было посидеть на форумах или внимательно почитать даташит. Нельзя подключать-отключать двигатель когда на контроллер подано питание!
В результате контроллер A благополучно сгорел. Эта проблема была решена покупкой нового драйвера на eBay. Теперь, уже с учетом накопленного грустного опыта, Nema 17 был подключен к Aи запущен, но Во время вращения ротора двигатель сильно вибрировал. О плавном движении не было и речи. Гугл вновь в помощь. Первая мысль — неправильное подключение обмоток.
Ознакомление с даташитом шагового двигателя и несколько форумов убедили, что проблема не в этом. При неправильном подключении обмоток двигатель просто не будет работать. Решение проблемы крылось в скетче. Оказалось, что есть замечательная библиотека для шаговых двигателей, написанная ребятами из Adafruit. Используем библиотеку AcclStepper и шаговый двигатель начинает работать плавно, без чрезмерных вибраций.
Решение проблемы крылось в скетче. Оказалось, что есть замечательная библиотека для шаговых двигателей, написанная ребятами из Adafruit. Используем библиотеку AcclStepper и шаговый двигатель начинает работать плавно, без чрезмерных вибраций.
Второй код для Arduino для обеспечения плавного вращения двигателя. Используется библиотека AccelStepper library. Эта строка повторяется вновь и вновь для непрерывного вращения двигателя. Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже.
В дискуссии часто рождаются новые идеи и проекты! Всегда рады конструктивному сотрудничеству. Со всеми вопросами, пожеланиями и предложениями обращайтесь на почту a.
Arduino и шаговый двигатель Nema Советы для начинающих. Arduino и шаговый двигатель Nema 17 Перед началом очередного проекта на Arduino, было решено использовать шаговый двигатель Nema
Схемы подключения шаговых двигателей
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу. Станки и мехатроника. Станки с ЧПУ. Фрезерные станки с ЧПУ 6. Колонные бесконсольные станки с ЧПУ 1. Портальные станки с ЧПУ 4. Токарные станки.
Станки с ЧПУ. Фрезерные станки с ЧПУ 6. Колонные бесконсольные станки с ЧПУ 1. Портальные станки с ЧПУ 4. Токарные станки.
Правильное подключение драйвера шагового двигателя DRV к arduino Минимальная схема подключения драйвера DRV
Главное меню
Для управления шаговыми двигателями используют специальные устройства — драйверы шаговых двигателей. Популярный драйвер шагового двигателя А работает от напряжения В и может обеспечить ток до 1 А на фазу без радиатора. Рисунок 4. Схема подключения для управления скоростью и направлением движения. База знаний. Вконтакте Instagram YouTube. Драйвер шагового двигателя A Драйверы моторов. Обзор драйвера шагового двигателя A
Схемы управления шаговыми двигателями
Шаговый двигатель Arduino предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим устройство и схему подключения шагового двигателя. Шаговый двигатель stepper motor предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.
Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.
Ниже представлена принципиальная схема драйвера биполярных шаговых двигателей с двумя L усиленный 48В, 4А.
Драйвер шагового двигателя A4988
Перед подключением Nema 17, за плечами был определенный опыт работы с шаговиком 24byj48 даташит. Управлялся он и с помощью Arduino, и с помощью Raspberry pi, проблем не возникало. Основная прелесть этого двигателя — цена около 3 долларов в Китае. Причем, за эту сумму вы приобретаете двигатель с драйвером в комплекте. Согласитесь, такое можно даже и спалить, не особо сожалея о содеянном. Теперь появилась задача поинтереснее.
Обратите внимание на следующие товары:
В этой статье мы подключаем шаговый двигатель 28BYJV к Arduino через драйвер шагового двигателя. Она была созданна конкретно для этого шагового двигателя 28BYJV и учитывающая все его индивидуальные параметры. Драйвер управляется через четыре управляющих входа обозначенные как IN1, IN2, IN3, IN4 , именно к ним необходимо подключить соответственно выходы Pin с номерами 8 Pin, 9 Pin, 10 Pin и 11 Pin на плате контроллера Ардуино как это показано на изображении ниже. Загружаем скетч: Для загрузки скетча необходимо в среде разработки Ардуино IDE нажать вкладку новый проект и в открывшиеся окошко поместить скетч приведенный ниже: Скетч, который необходимо загрузить в контроллер через среду разработки Ардуино IDE:. После сохранения он будет доступен для внесения необходимых изменений и корректировок например, для изменения направления вращения двигателя, отмена цикличности вращения или изменения скорости вращения Если по каким либо причинам Вы не смогли самостоятельно разобраться в подключении или программировании шагового двигателя 28BYJ, обратитесь к сотрудникам магазина робототехники и мехатроники — Robot-Kit. Наш сайт: www. Регистрация Забыли пароль?
Загружаем скетч: Для загрузки скетча необходимо в среде разработки Ардуино IDE нажать вкладку новый проект и в открывшиеся окошко поместить скетч приведенный ниже: Скетч, который необходимо загрузить в контроллер через среду разработки Ардуино IDE:. После сохранения он будет доступен для внесения необходимых изменений и корректировок например, для изменения направления вращения двигателя, отмена цикличности вращения или изменения скорости вращения Если по каким либо причинам Вы не смогли самостоятельно разобраться в подключении или программировании шагового двигателя 28BYJ, обратитесь к сотрудникам магазина робототехники и мехатроники — Robot-Kit. Наш сайт: www. Регистрация Забыли пароль?
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное.
Драйвер биполярных шаговых двигателей
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.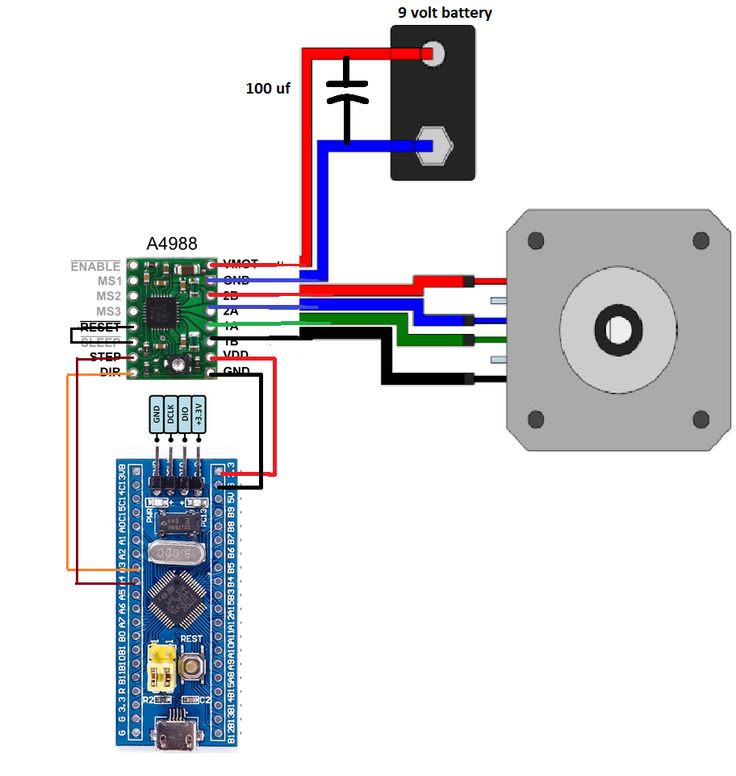 Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора.
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора.
Советы для начинающих. Arduino и шаговый двигатель Nema 17
Добро пожаловать Вход. Корзина Оформление заказа. Используется для управления двигателями типа Nema17 , Nema23 с регулируемым максимальным током фазы до 3А и оптоизолированными входными сигналами. Широко используется в системах ЧПУ и 3D-принтерах. Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом.
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя.
Шаговый двигатель 4 провода подключение
В этой статье мы поговорим о шаговых двигателях в проектах ардуино.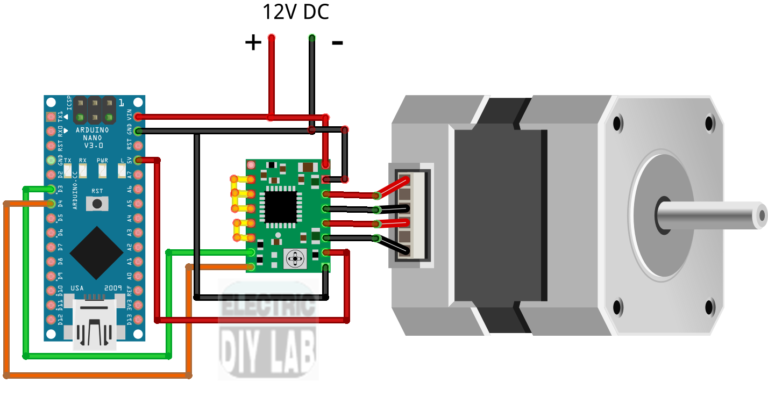 Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Схема работы шаговых двигетелй, способ подключения к Arduino и примеры скетчей — все это вы найдете в этой статье. Шаговый двигатель — это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора.
Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Схема работы шаговых двигетелй, способ подключения к Arduino и примеры скетчей — все это вы найдете в этой статье. Шаговый двигатель — это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора.
Как работает шаговый электродвигатель?
Теория и практика. Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок. Уроки, книги, видео. Профессиональное обучение и развитие.
Что такое шаговый двигатель и как им управлять
Шаговый двигатель – это устройство, преобразующее электрическую энергию в механическую. При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
Каждый шаг представляет собой угол, величина которого зависит от устройства соответствующего двигателя. Кроме того, величиной угла можно управлять.
Шаговые двигатели используются в самых разных областях: в автомобилестроении, приборостроении, везде, где требуется механическое движение с высокой точностью позиционирования.
Популярно использование шагового двигателя и в точной робототехнике.
Устройство шагового двигателя
Как любой мотор, шаговый двигатель состоит из статора и ротора. Обмотки шагового двигателя выполнены на статоре. Они не зависят друг от друга. На роторе установлены постоянные магниты. Когда ток подается на одну из обмоток, ротор поворачивается на соответствующий угол, после чего останавливается. Подача тока на следующую обмотку опять вызывает поворот ротора, за которым следует остановка. Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Таким образом, устройство шагового двигателя позволяет контролировать угол поворота ротора и частоту его вращения.
В отличие от сервопривода никакого датчика позиционирования в устройстве шагового двигателя не предусмотрено.
Если есть желание разобрать двигатель, чтобы познакомиться с его устройством, то это плохая идея. Система ротор-статор представляет собой замкнутый магнитопровод, который при вмешательстве теряет ряд своих свойств, что может негативно сказаться на работе двигателя. Поэтому разбирать двигатель категорически не рекомендуется.
Принцип работы шагового двигателя
Перемещение шагового двигателя состоит из многочисленных шагов. Управление шаговым двигателем осуществляется с печатной платы, питание может подаваться от источника постоянного тока.
Отличие шагового двигателя от сервопривода
В отличие от сервопривода шаговый двигатель перемещается по шагам. Благодаря этому с его помощью можно совершать очень точные движения. Угол поворота выходного вала сервопривода обычно ограничен диапазоном от 0°C до 180°C. У шагового двигателя такого ограничения нет. Он может вращаться непрерывно. Однако управлять шаговым двигателем сложнее, чем сервоприводом.
Основные технические характеристики шагового двигателя
Крутящий момент — механическая характеристика шагового двигателя. Чем выше крутящий момент, тем лучше способность двигателя преодолевать возникающее при вращении сопротивление.
Удерживающий момент – это момент блокировки ротора, когда шаговый двигатель находится под напряжением, но вращения не происходит.
Стопорный момент (тормозящий момент) нужен, чтобы при совершении шага происходила фиксация ротора в конечной позиции.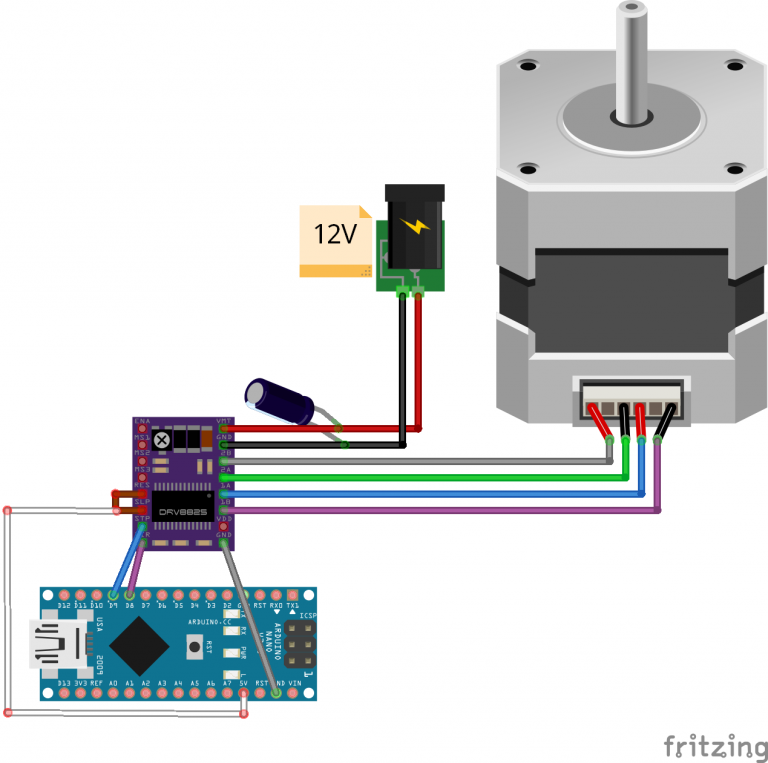 При отсутствии стопорного момента без поданного питания происходило бы проворачивание.
При отсутствии стопорного момента без поданного питания происходило бы проворачивание.
Номинальное напряжение – зависит от индуктивности двигателя. Чем выше индуктивность, тем выше требуется напряжение.
Номинальный ток – подается на обмотки шагового двигателя. Измеряется в Амперах.
Угол полного шага – способность двигателя совершать перемещение при одном шаге, указывается в градусах.
Момент инерции ротора – влияет на способность двигателя к разгону. Чем выше момент инерции, тем хуже разгон мотора.
Длина двигателя – длина корпуса без вала.
Типы шаговых двигателей
По строению различают следующие типы шаговых двигателей:
Шаговый двигатель с постоянным магнитом. Постоянный магнит такого двигателя выполнен в виде диска. Он расположен на роторе, и создает крутящий момент за счет притяжения и отталкивания обмотки на статоре.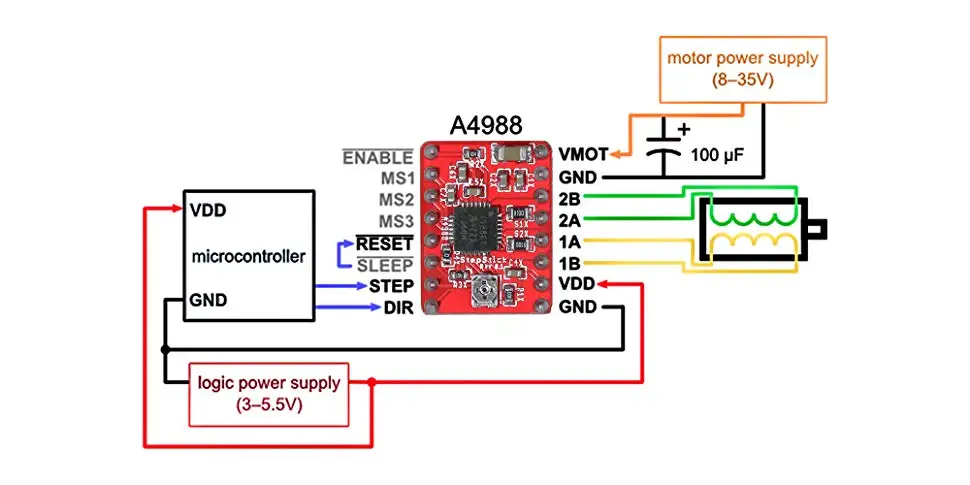
Шаговый двигатель с переменным магнитным сопротивлением. Такой шаговый двигатель не имеет постоянного магнита. На его роторе расположено зубчатое колесо из специального металла. Крутящий момент невысокий, но зато отсутствует стопорящий момент.
Гибридный шаговый двигатель. Представляет собой сочетание двух вышеперечисленных видов двигателей. Для гибридных двигателей характерна очень маленькая величина шага, в результате чего они способны достигать максимальной точности. Однако стоимость таких двигателей достаточно высока.
По типу обмотки шаговый двигатель может быть униполярным и биполярным.
Преимущества шаговых двигателей
• Главное преимущество шагового двигателя – это точность величины шага.
• Шаговый двигатель может быть быстро запущен и также быстро остановлен. Для выполнения этих действий требуется минимальное время.
• Обладает высокой надежностью.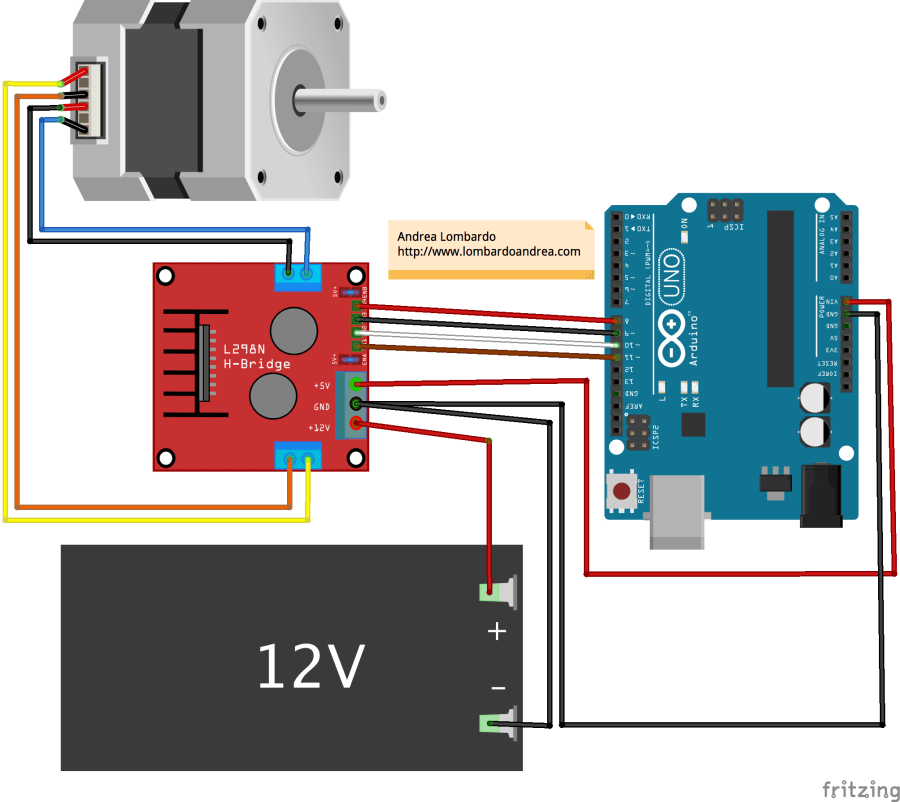 Стабильная работа при высоких нагрузках.
Стабильная работа при высоких нагрузках.
• Нет необходимости в датчиках или других элементах, обеспечивающих обратную связь. Позиционирование полностью определяется поступающими импульсами.
• Большой диапазон скоростей, в том числе возможность достижения низких скоростей.
• Доступная цена.
• Простота в установке и использовании.
Подключение шагового двигателя к печатным платам Arduino
Доступная цена шаговых двигателей и их точная эффективная работа сделали такие двигатели востребованным компонентом в любительской робототехнике. Для реализации различных творческих проектов шаговые двигатели подключатся к программируемому контроллеру Arduino. Такое подключение выполнить достаточно просто.
Обычно шаговый двигатель имеет от 4 до 6 проводов для подключения. Если у шагового двигателя четыре провода, то это биполярный двигатель. У биполярного двигателя два провода подключаются к одной обмотки, два – к другой.
Шесть проводов имеет униполярный двигатель. При этом два провода подключаются к концам каждой обмотки, а один – к ее середине. Эти провода подключаются к заземлению.
В униполярном двигателе за счет способа его подключения скорость вращения выше, но меньше крутящий момент. Если требуется увеличить крутящий момент, то из униполярного двигателя всегда можно сделать биполярный. Для этого просто не нужно подключать дополнительные провода.
При этом для контроллера не имеет значение, какой способ подключения выбран. В обоих случаях управление производится через два выхода для каждой обмотки.
Способ подключения выбирается в зависимости от того, что является в приоритете: скорость вращения или крутящий момент.
Нет необходимости задействовать ШИМ-выходы, так как управление двигателем зависит только от подачи тока на обмотки.
ШИМ-выходы используются для полушаговых и микрошаговых режимов. С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем.
С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем.
Питание шагового двигателя
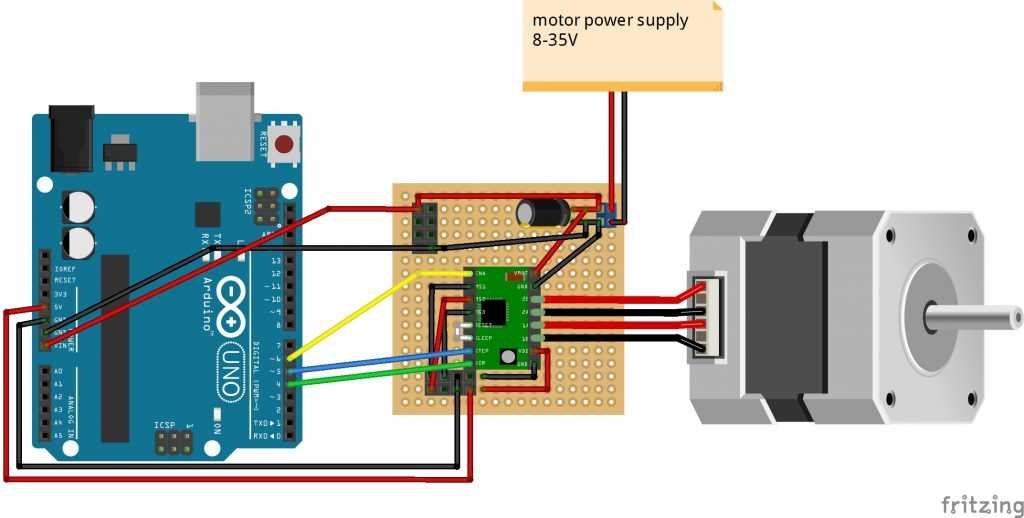
Рекомендуется использовать внешний источник питания 5-12 В, в противном случае ресурсов платы Arduino может оказаться недостаточно.
Следует всегда помнить, что во время подключения или отключения двигателя на программируемый контроллер не должно подаваться питание! Иначе контроллер может просто сгореть.
Библиотеки и управление шаговым двигателем
Использование библиотеки позволяет упростить управление шаговым двигателем. Среди предлагаемых библиотек можно выделить библиотеку Stepper и Accel Stepper. Библиотеку Stepper не нужно скачивать, она входит в Arduino IDE и подойдет для управления шаговым двигателем в простых проектах, предусматривающих использование лишь одного двигателя.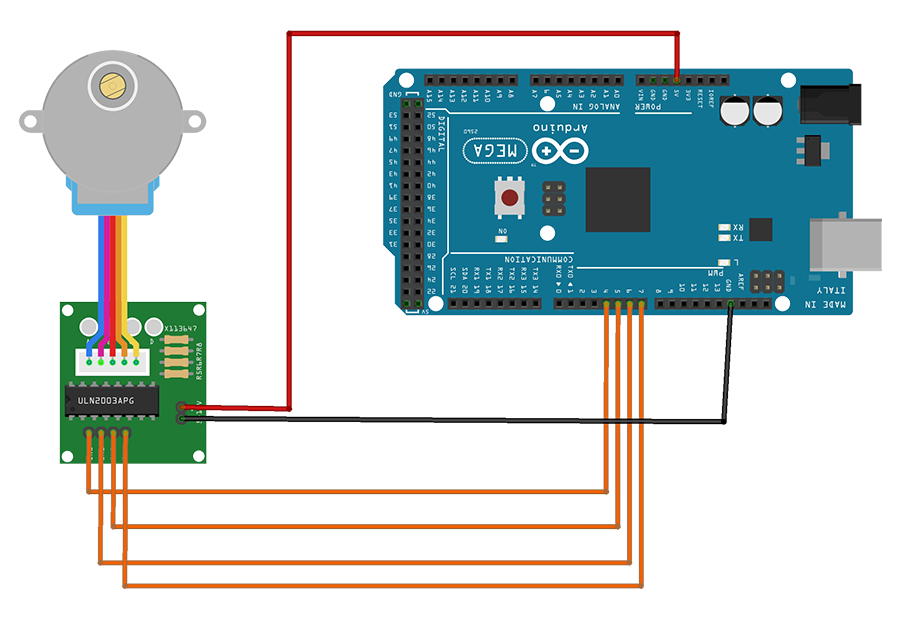 Библиотека Stepper подключается командой #include.
Библиотека Stepper подключается командой #include.
Библиотека Accel Stepper обладает большими возможностями. Например, с ее помощью можно управлять сразу несколькими шаговыми двигателями, а также их работой на низких скоростях. Эта библиотека предусматривает возможность ускорения и замедления. А главное она позволяет добиться плавной работы мотора.
После подключения библиотеки создается объект stepper и указывается, к каким пинам подключаются обмотки. Для этого необходимо задать количество шагов для одного оборота вала.
Драйвер
Также для управления шаговым двигателем используется драйвер. Драйвер позволяет управлять мощными двигателями, ток на которые соответственно поступает с внешнего источника питания.
Импульсы, поступающие на двигатель, формирует микроконтроллер. Для усиления этих импульсов и используется драйвер.
Функции драйвера
Прежде всего, драйвер нужен, чтобы обеспечить поступление тока на обмотки статора. Также драйвер отвечает за коммутацию обмоток и выполняет защитные функции. Тип драйвера влияет на мощность на валу двигателя.
Также драйвер отвечает за коммутацию обмоток и выполняет защитные функции. Тип драйвера влияет на мощность на валу двигателя.
На сегодняшний день существует большой выбор драйверов для шаговых двигателей, например, L293, ULN2003, A3967SLB и многие другие.
Возможные сложности
Перегрев шагового двигателя. Рабочая температура двигателя может достигать 80°C, но это еще не означает, что двигатель перегревается. Если температура мотора превышает 80°C, то только тогда можно говорить о перегреве. В случае перегрева первым делом нужно проверить, какой рабочий ток выставлен на драйвере, соответствует ли он номинальному току двигателя. Можно снизить питающее напряжение, но это приведет к снижению крутящего момента, и соответственно скажется на работе двигателя. В крайнем случае, на корпус двигателя можно установить радиатор и/или вентилятор.
Пропуск шагов. Это достаточно распространенная неприятность, связанная с работой шаговых двигателей. Причины могут быть разные. Вот некоторые из них.
Причины могут быть разные. Вот некоторые из них.
• Некачественный драйвер. Если драйвер неоригинальный, то он не всегда может справиться с непростым управлением шаговым двигателем.
• Ошибки в настройке драйвера. Например, ошибочно выставленное напряжение.
• Перегрузка двигателя. В этом случае нужно проверить, действительно ли двигатель подходит для тех целей, в которых он используется. Вероятно, нужно снизить скорость двигателя или использовать более габаритную модель.
Выбор шагового двигателя
К основным параметрам, по которым производится выбор двигателя, относятся: производитель, габариты двигателя, тип двигателя, ток фазы и индуктивность. Как правило, лучше работают двигатели с меньшей индуктивностью.
Заключение
Шаговые двигатели – эффективное решение, если нужно достичь точного перемещения в пространстве. Они представляют собой бюджетную альтернативу сервоприводу.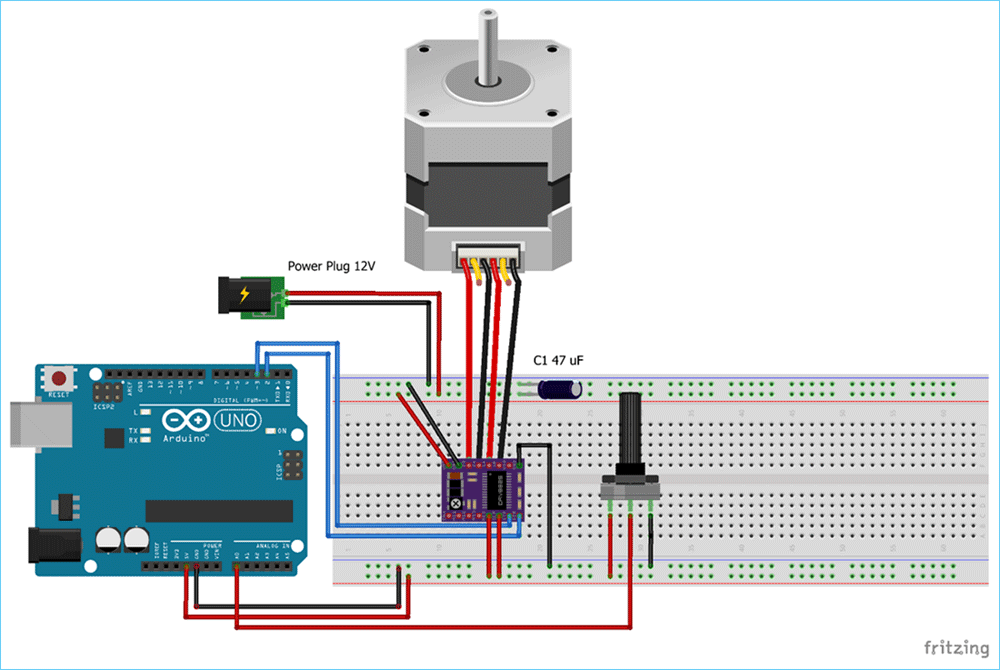 Благодаря уже созданным библиотекам ими легко управлять. Преимущества шаговых двигателей очевидны, поэтому они являются востребованным продуктом на рынке электронных устройств.
Благодаря уже созданным библиотекам ими легко управлять. Преимущества шаговых двигателей очевидны, поэтому они являются востребованным продуктом на рынке электронных устройств.
Как запустить 5-проводной гибридный шаговый двигатель с Arduino Uno?
спросил
Изменено
6 лет, 9 месяцев назад
Просмотрено
8к раз
У меня вопрос. Как запустить шаговый двигатель (Nema 17) с 5 проводами с Arduino и драйвером шагового двигателя.
Вот драйвер, степпер и Arduino, когда степпер имеет 4 провода.
http://jdreyer.com/projects/Arduino/ArduinoEasyDriverStepperMotorv1_Resize.png
Мне нужна помощь в определении проводов моего гибридного шагового двигателя. Предоставлю фото разобранного мотора.
Вопросы:
- Идентификация проводов?
- Как подключить его к ArduinoEasyDriver?
- Требуется пример кода.
ОБНОВЛЕНИЕ
Я сейчас думаю сделать его биполярным (4 провода), т.к. сейчас в 5
конфигурация проводов мотор однополярный. Я провел небольшое исследование, и это
мотор ГИБРИД. Он может управляться как униполярный или биполярный. Я попробую
провести диагностику проводки и найти общий провод. Я буду держать тебя
информированный.
- Arduino-Uno
- двигатель
- электроника
- шаговый двигатель
3
1) это наверное что-то типа A1, A2, Common, B1, B2. Проверить это можно с помощью омметра. Общим для любых других было бы определенное сопротивление X, а между любыми другими (A1-A2, B1-B2, A1-B1, A1-B2, B1 A2) было бы 2X.
2) Нельзя. Это униполярный степпер.
Часто задаваемые вопросы EasyDriver № 5.1 на http://www.schmalzhaus.com/EasyDriver/ говорят: «… Единственный тип, который вы не можете использовать, — это 5-проводные шаговые двигатели.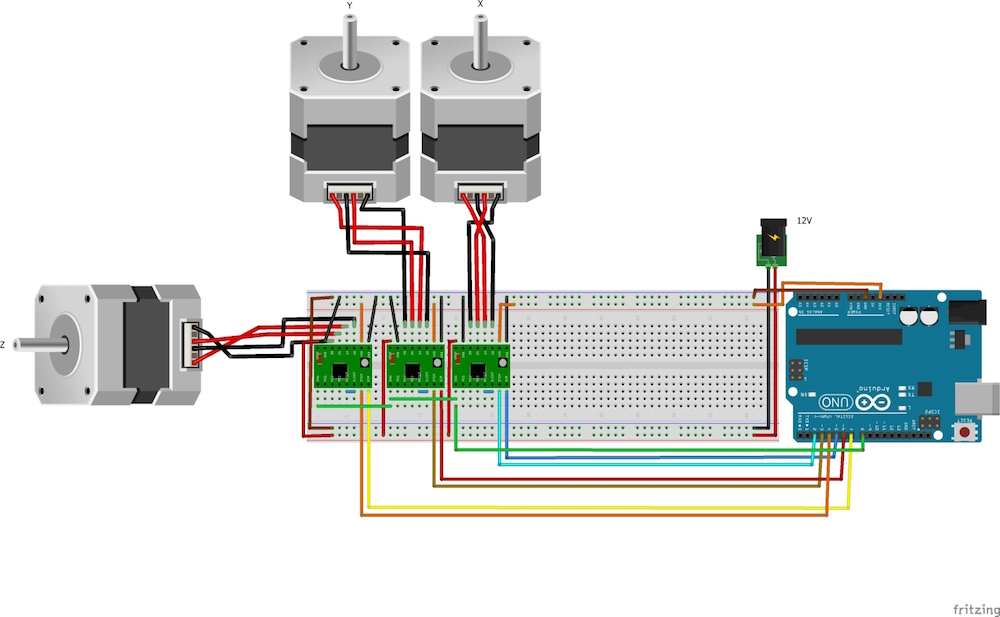 (Им нужны однополярные драйверы.)
(Им нужны однополярные драйверы.)
Проблема с 5-проводными шаговыми двигателями заключается в том, что они закорачивают середину двух катушек вместе, что затрудняет независимое управление катушками.
Поскольку у вас открыт двигатель, вы можете сделать операцию и отсоединить центры катушек друг от друга, но вам, вероятно, будет лучше вместо этого приобрести шаговый двигатель с 4, 6 или 8 проводами.
6
В шаговых двигателях есть несколько типов проводки, но в основном внутри шагового двигателя есть две катушки. Чтобы выяснить, где находится проводка, вам нужен способ проверить, подключены ли катушки. В вашей установке я бы предложил соединить два провода одновременно и вращать вал. Если вал оказывает сопротивление, значит, вы нашли два провода для одной катушки.
Похоже, что у вашего шагового двигателя может быть три катушки, но из 6 проводов вы также можете получить только 4 провода; что равняется 2 виткам.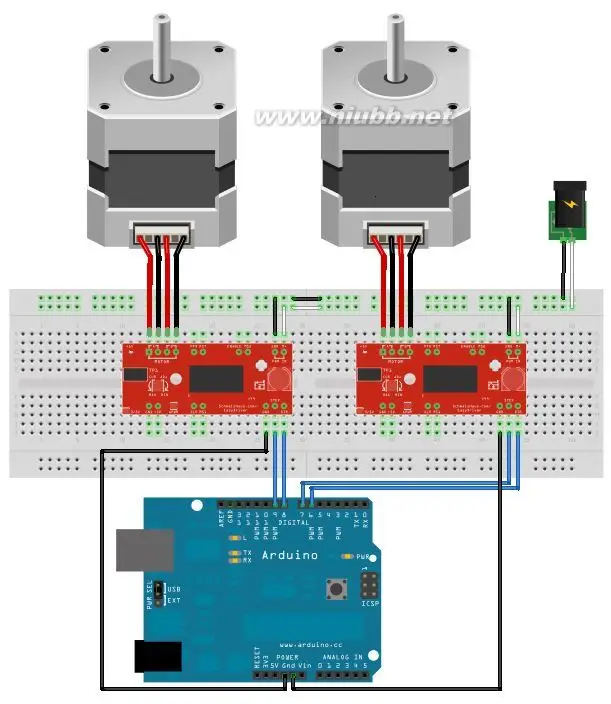
Что касается подключения к простому драйверу, для простого драйвера требуется всего две катушки. вам нужно будет найти драйвер, который может принять три катушки, или просто подключить две катушки из трех и надеяться на лучшее.
Поиск контакта заземления
Мы должны начать с поиска контакта заземления/земли.
У вас есть омметр? Я считаю, что один из контактов должен быть GND/земля и должен иметь низкое сопротивление по отношению к другим контактам.
Подключение шагового двигателя
Шаговые двигатели имеют катушку и, таким образом, являются индуктивной нагрузкой, вам следует проверить подключение к источникам, чтобы убедиться, что они действительны.
(На данный момент я не могу дать вам 100% точную схему подключения, но ее будет легко найти, так как шаговые двигатели довольно распространены.)
Вы можете использовать предварительно собранный шаговый двигатель. Наличие такой вещи полезно, когда вы хотите разработать схему самостоятельно.
Управление шаговыми двигателями
Вы должны сгенерировать такой сигнал: https://en.wikipedia.org/wiki/Stepper_motor#Phase_current_waveforms
(Источник/ссылка описывает различные формы шагового двигателя. Например, «Wave drive (одна фаза включена)», в котором каждая катушка активируется/деактивируется вращательным образом, заставляя сердечник вращаться.)
Extra
Adafruit всегда имеет очень хорошо документированные учебные пособия для начинающих:
https://learn.adafruit.com/all-about-stepper-motors/types-of-steppers
Вики RepRap должна быть хорошим источником, так как степперы являются основой 3D-принтеров (RepRap — это бренд 3D-принтеров):
http://reprap.org/wiki/Stepper_wiring
1
Вместо того, чтобы делать операции на вашем униполярном степпере, вы можете использовать его как униполярный степпер. Несколько транзисторов для подключения двигателя к питанию (просто возьмите чип массива Дарлингтона) и четыре выходных контакта на Arduino.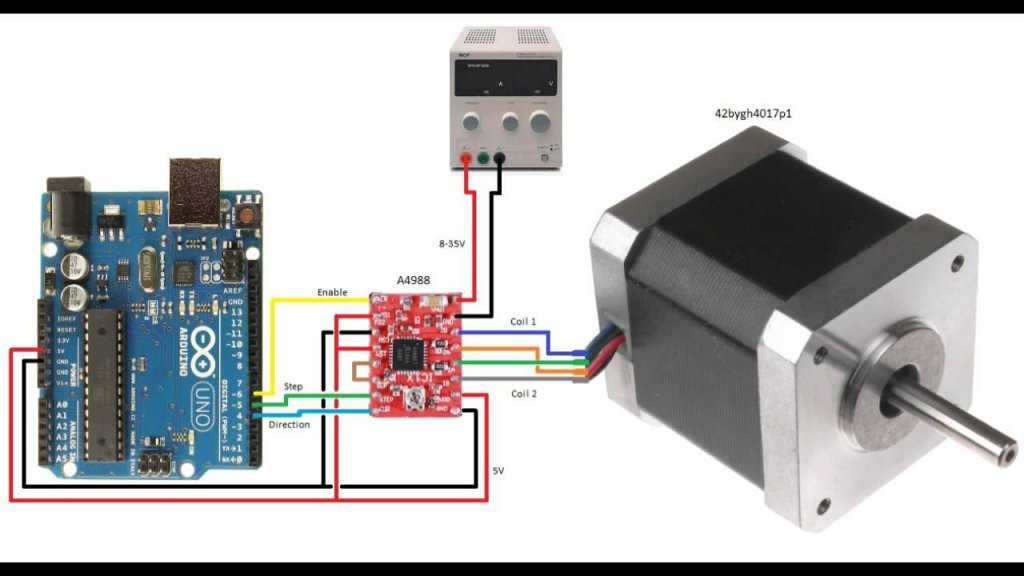 Работает отлично.
Работает отлично.
2
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Управление большими шаговыми двигателями с помощью Arduino
ЧПУ и обработка
цех
5
Любой шаговый двигатель великолепен, но большие поражают воображение. Существует множество драйверов шаговых двигателей, предназначенных для использования с Arduino, но они, как правило, ограничены Nema 17 и Nema 23. К счастью, использование более крупных шаговых двигателей (в данном случае Nema 34) с Arduino по-прежнему несложно. Большие шаговые двигатели обеспечивают удивительное сочетание точности, контроля и крутящего момента, которые могут быть полезны для чего угодно, от домашней автоматизации до станков с ЧПУ, сделанных своими руками. В этих двух видеороликах мы рассмотрим настройку двигателя, драйвера и Arduino.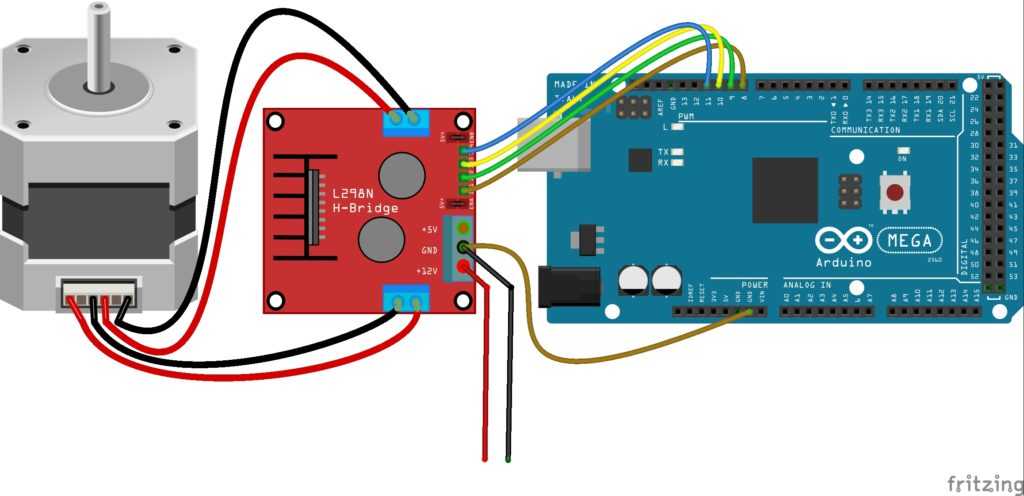
Часть 1: тестовый код, увеличение нагрузки
В этом видео мы тестируем код из трех разных программ Arduino для управления большим шаговым двигателем NEMA 34, а затем увеличиваем нагрузку на вал, чтобы увидеть, как шаговый двигатель справляется с дополнительным весом.
Часть 2. Изготовление стальной пластины
В следующем видео мы изготавливаем тестовую пластину в механическом цехе, чтобы проверить скорость и реакцию двигателя, экспериментируя с тем, что работает, а что нет. Мы проделываем отверстие диаметром 0,75 дюйма в стальной пластине размером ~ 7 фунтов, 15 дюймов и 1/4 дюйма, затем поворачиваем втулку, которая позволит нам прикрепить пластину к D-валу шагового двигателя.
 youtube.com/embed/WKdyBZvlFXk?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
youtube.com/embed/WKdyBZvlFXk?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»/>
Схема, спецификация и код
Как подключить схему
- Микрошаговый драйвер ST-M5045
- Pul+ идет на +5В
- Pul- идет на Arduino Pin 9
- Dir+ идет на +5В
- Dir- идет к Arduino Pin 8
- Включить+ ни к чему
- Включить — ничего
Спецификация
- Ардуино
- Блок питания 24 В
- Микрошаговый драйвер ST-M5045
- макетная плата
- перемычки
- Двигатель Nema 34 (но на самом деле любой шаговый двигатель, размер которого подходит для драйвера)
Примеры кода
Загрузите эскизы Arduino
Примеры кода Nema34_Arduino включают использование потенциометра для управления скоростью, а также программу для проверки скорости остановки двигателя.
