Содержание
Шаговый Двигатель — Принцип Работы для Чайников
Содержание
- 1 Как работает шаговый двигатель с переменным магнитным сопротивлением
- 2 Как работает гибридный шаговый двигатель
Каким образом роботизированный манипулятор на предприятии повторяет одни и те же движения снова и снова? Как автоматический фрезерный станок может двигаться с такой точностью? Это возможно благодаря шаговому двигателю. Особенность шагового двигателя заключается в том, что он может контролировать угловое положение ротора без замкнутого контура обратной связи, это простая и точная разомкнутая система.
Как работает шаговый двигатель с переменным магнитным сопротивлением
Для начала давайте разберемся, как работает шаговый двигатель с переменным магнитным сопротивлением, который является самым простым. Позднее мы рассмотрим устройство высокоточного и широко используемого типа двигателя. У этого двигателя 6 зубьев на статоре, которые могут быть запитаны от трех отдельных источников постоянного тока.
Ротор состоит из ряда стальных пластин. У него отличное от статора количество зубьев в данном случае их 4 это сделано намеренно, для того чтобы только одна пара зубьев ротора могла одновременно находиться напротив зубьев статора.
Вы и сами можете объяснить, как работает этот шаговый двигатель. Если обесточить обмотку A и запитать обмотку B станет ясно, что ротор будет двигаться, как показано на модели.
Из уроков геометрии понятно, что один шаг соответствует 30 градусам. Чтобы перейти к следующему шагу обесточим обмотку B и запитаем обмотку C.
После этого вновь запитаем обмотку A. То есть ротор занимает позицию с наименьшим сопротивлением.
Размер шага двигателя составляет 30 градусов, точность может быть доведена до 15 градусов при помощи одного простого приема, когда запитана обмотка A, ротор находится в таком положении мы знаем, что если запитать обмотку B он повернется на 30 градусов. Но что произойдет если обмотки A и B будут запитаны одновременно? Ротор займет положение между двумя этими обмотками, то есть повернется на 15 градусов.
После этого обесточим А. Когда ротор установится напротив обмотки B, запитаем обмотку С, такой тип работы называется режимом дробления шага.
Как работает гибридный шаговый двигатель
Двигатель который мы рассматривали, называется двигателем с переменным магнитным сопротивлением. Наиболее универсальными и широко распространенными являются гибридные шаговые двигатели. Рассмотрим работу стандартного гибридного двигателя с величиной шага в 1.8 градуса.
Гибридный двигатель имеет намагниченный по оси ротор со стальными зубчатыми наконечниками. Таким образом, одна сторона ротора является северным магнитным полюсом, а другая южным.
Точность данного двигателя заключается в продуманном расположении зубьев ротора и статора. Разберемся, как это работает. Ротор имеет 50 зубьев, чтобы понять, как расположены зубья статора для начала, предположим, что у статора тоже 50 зубьев. Однако на самом деле их на 2 меньше, чем у ротора. Таким образом у статор остается 48 зубьев.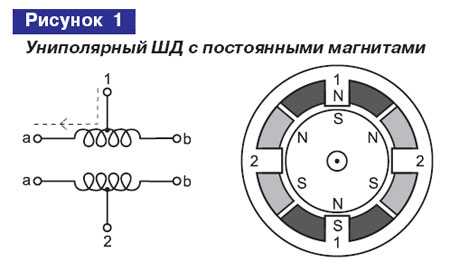
Давайте разделим их на 4 группы попарно, как показано на модели (подробнее смотри на видео).
Теперь давайте выровняем эти группы, зеленая группа сдвигается так что она оказывается наполовину выровнены с зубьями ротора. Зубья желтой группы полностью смещены относительно зубьев ротора. Синяя группа наполовину выровнена относительно зубьев ротора. Красная группа остается на своем месте, то есть красная группа зубьев полностью выровнена с ротором, а желтая группа смещена. Две другие группы смещены лишь наполовину.
Следует помнить, что сторона ротора направленная к нам является южным магнитным полюсом. Обмотки статора соединяются следующим образом, они представляют собой две независимые группы обмоток. При подаче питания на обмотку A, статор образует следующую картину намагниченности. Одна пара полюсов статора действует как северный полюс, а другая как южный. Так как противоположные полюса притягиваются, они будут совмещены, полюса с одинаковой полярностью будут смещены.
При подаче питания на обмотку A, статор образует следующую картину намагниченности. Одна пара полюсов статора действует как северный полюс, а другая как южный. Так как противоположные полюса притягиваются, они будут совмещены, полюса с одинаковой полярностью будут смещены.
Смотрите, что произойдет с ротором при подаче питания на обмотку B, он совершит вращение на небольшой угол чтобы вы равняться с новым северным полюсом. Очевидно, что этот угол составляет одну четвертую часть углового шага. Другими словами, ротор поворачивается на 1,8 градуса, затем задействуется обмотка A с противоположной полярностью и вновь ротор поворачивается на одну целую восемь десятых градуса.
Данный процесс повторяется и двигатель совершает высокоточные движения. Разрешение угла шага может быть улучшено при помощи дробления шага. Интересно отметить, что северные зубчатые наконечники находятся между южными зубчатыми наконечниками, таким образом гарантируется выравнивание полюсов с противоположными полярностями.
Вот так работает гибридный шаговый двигатель, такие двигатели идеально подходят для применения в областях, где необходимы четкие движения и простое управление.
Поделиться с друзьями:
Твитнуть
Поделиться
Поделиться
Отправить
Класснуть
Шаговый двигатель принцип работы
Содержание
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Чаще всего в быту и на производстве применяются двухфазные шаговые двигатели.
В зависимости от типа обмотки электромагнитных катушек они подразделяются на:
 В зависимости от типа обмотки электромагнитных катушек они подразделяются на:
В зависимости от типа обмотки электромагнитных катушек они подразделяются на:Чаще всего в быту и на производстве применяются двухфазные шаговые двигатели. В зависимости от типа обмотки электромагнитных катушек они подразделяются на:
- униполярные;
- биполярные.
Для подключения обмоток соединительные провода должны прикасаться к постоянным магнитам двигателя. При соединении клемм катушки вал проворачивается с трудом. Поскольку общий провод длиннее, чем провод, соединяющий катушки, сопротивление между торцами проводов и торцами катушек в два раза больше сопротивления между торцом катушки и общим проводом.
В механизмах второго типа есть только одна фазовая обмотка. Управляющая схема такого движка обычно сложнее, так как ток в обмотку поступает при помощи магнитного полюса переломным образом. Два провода на фазу не являются общими.
Трехфазный шаговый двигатель устанавливается на фрезерных станках с ЧПУ, запускаемых с компьютера, и транспортных средствах, в которых используется дроссельная заслонка.
Особого внимания заслуживает гибридный вариант шаговых двигателей, который вобрал в себя все лучшие качества электродвигателей с постоянным и переменным магнитным сопротивлением. Ниже мы рассмотрим устройство, принцип работы и применение шаговых электродвигателей-гибридов.
- ВКонтакте
- ok
- YouTube
- Яндекс.Дзен
- TikTok
Шаговый тип электродвигателей представляет собой синхронное бесщеточное устройство с парой обмоток, через которые, собственно, и подается ток. Принцип действия электродвигателя подобного типа заключается в том, что ток, передаваемый на одну из обмоток статора, провоцирует фиксацию ротора. Как следствие, попеременная активация обмоток устройства вызывает шаги ротора, иначе говоря, его дискретные угловые перемещения.
Особого внимания заслуживает гибридный вариант шаговых двигателей, который вобрал в себя все лучшие качества электродвигателей с постоянным и переменным магнитным сопротивлением. Ниже мы рассмотрим устройство, принцип работы и применение шаговых электродвигателей-гибридов.
Ниже мы рассмотрим устройство, принцип работы и применение шаговых электродвигателей-гибридов.
Шаговый электродвигатель, принцип работы которого основан на гибридном использовании постоянного и переменного тока, широко применяется в машиностроении.
Точность определения шага зависит от качества механической обработки ротора и статора электродвигателя. Большинство производителей современных шаговых двигателей готовы гарантировать точность выставления шага до 5 процентов от величины шага.
Однако в приводах большинства механизмов, работающих в старт-стопном режиме, чаще применяется другой тип — шаговый электродвигатель, управление которого связано с интегрированным контроллером. Они способны создавать высокий крутящий момент даже при весьма низких скоростях вращения. Этот тип широко используется в устройствах компьютерной памяти (НГМД, НЖМД и прочие).
Основным преимуществом всех современных шаговых электродвигателей является их точность. Более того, подобные устройства располагают к себе отличным соотношением цены и качества. В частности, шаговые приводы практически в два раза дешевле аналогичных сервоприводов. Шаговые электродвигатели также прекрасно справляются с автоматизацией отдельных систем и узлов, которые не нуждаются в высокой динамике.
В частности, шаговые приводы практически в два раза дешевле аналогичных сервоприводов. Шаговые электродвигатели также прекрасно справляются с автоматизацией отдельных систем и узлов, которые не нуждаются в высокой динамике.
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Конструкция и применение шаговых двигателей
Принцип работы шагового электропривода и шаговых электродвигателей
Конструкция и применение шаговых двигателей
Шаговые электродвигатели относятся к синхронным машинам. Их можно разделить на вращающиеся, линейные и комбинированные. Во вращающихся шаговых электродвигателях катушки обмоток укладываются в пазах железа статора с угловым смещением, зависящим от числа фаз.
Плоский линейный шаговый электродвигатель
естественная интеграция с приложениями цифрового управления;
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Шаговые двигатели являются приводными исполнительными механизмами, обеспечивающими фиксированные угловые перемещения (шаги). Каждое изменение угла поворота ротора — это реакция шагового двигателя на входной импульс.
Дискретный электропривод с шаговым двигателем естественным образом сочетается с цифровыми управляющими устройствами, что позволяет успешно использовать его в станках с числовым программным управлением, в промышленных роботах и манипуляторах, в часовых механизмах.
Дискретный электропривод может быть реализован также с помощью серийных асинхронных электродвигателей, которые за счет специального управления могут работать в шаговом режиме.
Шаговые двигатели применяются в электроприводах мощностью от долей ватта до нескольких киловатт. Расширение шкалы мощности дискретного электропривода может быть достигнуто при использовании серийных асинхронных электродвигателей, которые за счет соответствующего управления могут работать в шаговом режиме.
Принцип действия шаговых двигателей всех типов состоит в следующем. С помощью электронного коммутатора вырабатываются импульсы напряжения, которые подаются на обмотки управления, расположенные на статоре шагового двигателя.
В зависимости от последовательности возбуждения обмоток управления происходит то или иное дискретное изменение магнитного поля в рабочем зазоре двигателя. При угловом перемещении оси магнитного поля обмоток управления шагового двигателя его ротор дискретно поворачивается вслед за магнитным полем. Закон поворота ротора определяется последовательностью, скважностью и частотой управляющих импульсов, а также типом и конструктивными параметрами шагового двигателя.
Принцип действия шагового двигателя (получение дискретного перемещения ротора) рассмотрим на примере простейшей схемы двухфазного шагового двигателя (рис. 1).
Рис. 1. Упрощенная схема шагового двигателя с активным ротором
Шаговый двигатель имеет на статоре две пары явно выраженных полюсов, на которых Находятся обмотки возбуждения (управления): обмотка 3 с выводами 1Н — 1К и обмотка 2 с выводами 2Н — 2К. Каждая обмотка состоит из двух частей, находящихся на противоположных полюсах статора 1 ШД.
Каждая обмотка состоит из двух частей, находящихся на противоположных полюсах статора 1 ШД.
Ротор в рассматриваемой схеме представляет собой двухполюсный постоянный магнит. Обмотки питаются импульсами от устройства управления, которое преобразует одноканальную последовательность входных импульсов управления f упр, в многоканальную (по числу фаз шагового двигателя).
Рассмотрим работу шагового двигателя, предположив, что в начальный момент напряжение подано на обмотку 3. Ток в этой обмотке вызовет намагничивание вертикально расположенных полюсов N и 8. В результате взаимодействия магнитного поля с постоянным магнитом ротора последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают.
Положение будет устойчивым, поскольку на ротор действует синхронизирующий момент, стремящийся возвратить ротор в положение равновесия: М = М m ах х sin α ,
где М m ах — максимальный момент, α — угол между осями магнитных полей статора и ротора.
Основной режим работы шагового двигателя — динамический. Шаговые двигатели в отличие от синхронных рассчитаны на вхождение в синхронизм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом электроприводе обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую.
Шаговые двигатели в отличие от синхронных рассчитаны на вхождение в синхронизм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом электроприводе обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую.
Пуск шагового двигателя осуществляется скачкообразным или постепенным увеличением частоты входного сигнала от нуля до рабочей, торможение — снижением ее до нуля, а реверс — изменением последовательности коммутации обмоток шагового двигателя.
Шаговые двигатели характеризуются следующими параметрами: число фаз (обмоток управления) и схема их соединения, тип шагового двигателя (с активным или пассивным ротором), одиночный шаг ротора (угол поворота ротора при единичном импульсе), номинальное напряжение питания, максимальный статический хронизирующий момент, номинальный вращающий момент, момент инерции ротора, частота приемистости.
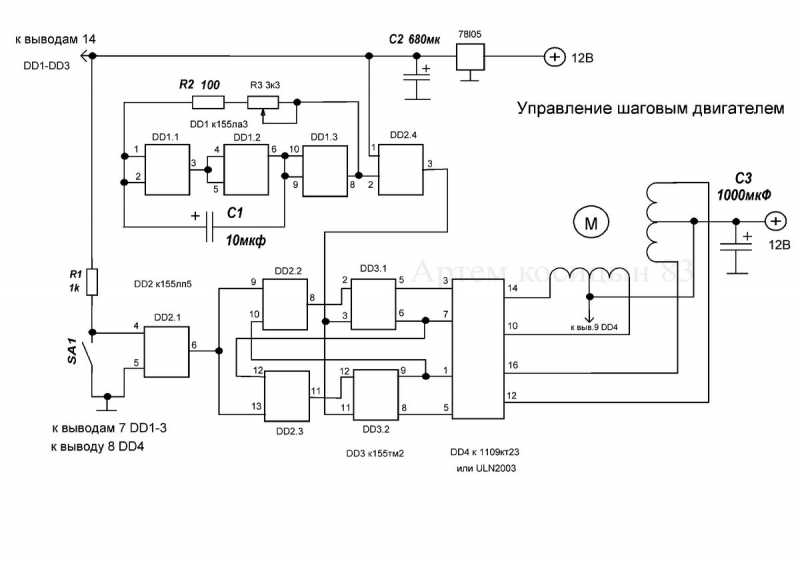
Шаговые двигатели бывают однофазными, двухфазными и многофазными с активным или пассивным ротором. Управление шаговым двигателем обеспечивается электронным блоком управления. Пример схемы управления шаговым двигателем приведен на рисунке 2.
Управление шаговым двигателем обеспечивается электронным блоком управления. Пример схемы управления шаговым двигателем приведен на рисунке 2.
Рис. 2. Функциональная схема разомкнутого электропривода с шаговым двигателем
Сигнал управления f упр в виде импульсов напряжения поступает на вход блока 1, преобразующего последовательность импульсов, например в четырехфазную систему однополярных импульсов (в соответствии с числом фаз шагового двигателя).
Блок 2 формирует эти импульсы по длительности и амплитуде, необходимым для нормальной работы коммутатора 3, к выходам которого подключены обмотки шагового двигателя 4. Коммутатор и остальные блоки питаются от источника постоянного тока 5.
При повышенных требованиях к качеству дискретного привода применяют замкнутую схему шагового электропривода (рис. 3), которая кроме шагового двигателя включает преобразователь П, коммутатор К и датчик шага ДШ. В таком дискретном приводе информация о действительном положении вала рабочего механизма РМ и скорости шагового двигателя поступает на вход автоматического регулятора, который обеспечивает заданный характер движения привода.
Рис. 3. Функциональная схема замкнутого дискретного привода
В современных системах дискретного привода применяются микропроцессорные средства управления. Область применения приводов с шаговыми двигателями постоянно расширяется. Их использование перспективно в сварочных автоматах, приборах времени, лентопротяжных и регистрирующих механизмах, системах управления топливоподачей двигателей внутреннего сгорания.
Преимущества шаговых двигателей:
высокая точность, даже в разомкнутой структуре управления, т. е. без датчика угла поворота;
естественная интеграция с приложениями цифрового управления;
отсутствие механических коммутаторов, которые часто создают проблемы в двигателях других типов.
Недостатки шаговых двигателей:
малый вращающий момент но сравнению с двигателями приводов непрерывного типа;
высокий уровень вибрации из-за скачкообразного движения;
большие ошибки и колебания при потере импульсов в системах с разомкнутым контуром управления.
Преимущества шаговых двигателей намного превосходят их недостатки, поэтому они часто применяются в тех случаях, когда достаточно небольшой мощности приводных устройств.
В статье использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Сделайте небольшой донат на развитие сайта «Школа для электрика»!
© 2016-2020 24techno-guide.ru
Все права защищены.
Использование материалов сайта
возможно только при условии
установки активной прямой
ссылки на наш ресурс.
© 2016-2020 24techno-guide.ru
Все права защищены.
Использование материалов сайта
возможно только при условии
установки активной прямой
ссылки на наш ресурс.
Главная (Главная страница сайта)
Авто (Обзоры, отзывы, тест-драйвы автомобилей)
Двигатели (Описание и устройство различных двигателей)
Техно (Статьи про технику и механику)
Тюнинг (Обзор тюнингованых автомобилей)
Ремонт (Ремонт своими руками)
Трактора (Тракторная спец техника)
Осаго (Все про автострахование)
Автозвук (Музыка в машину)
АвтоЗАКОНЫ (Пдд, штрафа и автозаконы)
Лайфхаки (Хитрости жизни)
Фото/Видео (Без комментариев)
Все статьи (Все публикаций которые есть на сайте)
Данный процесс повторяется и двигатель совершает высокоточные движения.
 Разрешение угла шага может быть улучшено при помощи дробления шага. Интересно отметить, что северные зубчатые наконечники находятся между южными зубчатыми наконечниками, таким образом гарантируется выравнивание полюсов с противоположными полярностями.
Разрешение угла шага может быть улучшено при помощи дробления шага. Интересно отметить, что северные зубчатые наконечники находятся между южными зубчатыми наконечниками, таким образом гарантируется выравнивание полюсов с противоположными полярностями.Как работает шаговый двигатель с переменным магнитным сопротивлением
Для начала давайте разберемся, как работает шаговый двигатель с переменным магнитным сопротивлением, который является самым простым. Позднее мы рассмотрим устройство высокоточного и широко используемого типа двигателя. У этого двигателя 6 зубьев на статоре, которые могут быть запитаны от трех отдельных источников постоянного тока.
p, blockquote 3,0,0,0,0 —>
p, blockquote 4,0,0,0,0 —>
Ротор состоит из ряда стальных пластин. У него отличное от статора количество зубьев в данном случае их 4 это сделано намеренно, для того чтобы только одна пара зубьев ротора могла одновременно находиться напротив зубьев статора.
p, blockquote 5,0,0,0,0 —>
p, blockquote 6,0,0,0,0 —>
Вы и сами можете объяснить, как работает этот шаговый двигатель.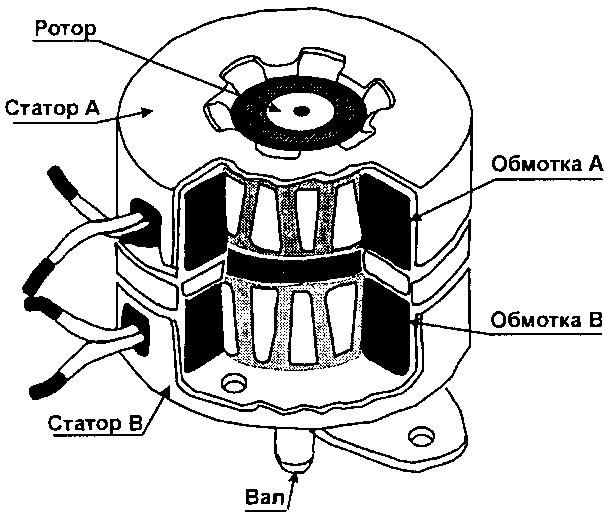 Если обесточить обмотку A и запитать обмотку B станет ясно, что ротор будет двигаться, как показано на модели.
Если обесточить обмотку A и запитать обмотку B станет ясно, что ротор будет двигаться, как показано на модели.
p, blockquote 7,0,0,0,0 —>
p, blockquote 8,0,1,0,0 —>
Из уроков геометрии понятно, что один шаг соответствует 30 градусам. Чтобы перейти к следующему шагу обесточим обмотку B и запитаем обмотку C.
p, blockquote 9,0,0,0,0 —>
p, blockquote 10,0,0,0,0 —>
После этого вновь запитаем обмотку A. То есть ротор занимает позицию с наименьшим сопротивлением.
p, blockquote 11,0,0,0,0 —>
p, blockquote 12,0,0,0,0 —>
Размер шага двигателя составляет 30 градусов, точность может быть доведена до 15 градусов при помощи одного простого приема, когда запитана обмотка A, ротор находится в таком положении мы знаем, что если запитать обмотку B он повернется на 30 градусов. Но что произойдет если обмотки A и B будут запитаны одновременно? Ротор займет положение между двумя этими обмотками, то есть повернется на 15 градусов.
p, blockquote 13,0,0,0,0 —>
p, blockquote 14,0,0,0,0 —>
После этого обесточим А. Когда ротор установится напротив обмотки B, запитаем обмотку С, такой тип работы называется режимом дробления шага.
p, blockquote 15,0,0,0,0 —>
p, blockquote 16,1,0,0,0 —>
где К1 – коэффициент, равный 1 при симметричной и 2 – при несимметричной коммутации; К2 – коэффициент, равный 1 при однополярной и 2 – при разнополярной коммутации .
§4.1.Конструкция,принцип работы и характеристики синхронного шагового двигателя
Синхронными называются электрические машины переменного тока, у которых в рабочем режиме угловая скорость ротора равна угловой скорости магнитного поля статора и не зависит от нагрузки. В отдельных случаях скорость ротора кратна скорости поля статора.
В связи с развитием цифровой вычислительной техники разрабатывают и совершенствуют исполнительные элементы дискретного действия и, в частности, электрические шаговые двигатели. Шаговыми называют синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота вала или фиксированное перемещение без датчиков обратной связи. Шаговые двигатели выпускаются мощностью от единиц микроватт до киловатта, т.е. в основном – это микродвигатели и двигатели малой мощности.
Шаговыми называют синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота вала или фиксированное перемещение без датчиков обратной связи. Шаговые двигатели выпускаются мощностью от единиц микроватт до киловатта, т.е. в основном – это микродвигатели и двигатели малой мощности.
Шаговые микродвигатели (ШД) работают в комплекте с полупроводниковыми коммутаторами. Роль коммутатора состоит в переключении обмоток управления ШД с последовательностью и частотой, соответствующими заданной команде. При этом результирующий угол поворота ШД строго соответствует числу переключений обмоток управления, направление поворота – порядку переключений, а угловая скорость – частоте переключений.
Классификация основных типов шаговых двигателей приведена на рис.4.1.
Шаговые двигатели являются многополюсными машинами. Их можно подразделить на три основные конструктивные группы: с постоянными магнитами (активного типа), реактивные и индукторные. Они могут иметь различное число фаз, но наибольшее распространение получили двух-, трех- и четырехфазные ШД. Напряжение питания обмотки управления шагового двигателя представляет собой последовательность однополярных или разнополярных прямоугольных импульсов, поступающих от коммутатора.
Напряжение питания обмотки управления шагового двигателя представляет собой последовательность однополярных или разнополярных прямоугольных импульсов, поступающих от коммутатора.
Двигатели активного типа. Статор шаговых двигателей имеет явновыраженные полюсы, на которых располагают обмотки управления. Число пар полюсов каждой из обмоток управления рм равно числу пар полюсов ротора. Ротор обычно представляет собой многополюсный постоянный магнит с радиальной намагниченностью.
Принцип действия ШД можно рассмотреть на примере двухполюсного двигателя.
Показанная на рис. 4.2 раздельно-совместная последовательность включения обмоток управления является несимметричной системой коммутации, так как нечетным и четным тактам соответствует возбуждение различного числа обмоток. Результирующий поток статора меняется от такта к такту, что вызывает пульсацию синхронизирующего момента и является недостатком схемы.
Систему коммутации называют симметричной, если на всех тактах возбуждается одинаковое число обмоток управления (раздельно, парами и т. д.). При симметричной коммутации шаг увеличивается вдвое, а результирующий поток статора на всех тактах одинаков.
д.). При симметричной коммутации шаг увеличивается вдвое, а результирующий поток статора на всех тактах одинаков.
Величина шага в значительной мере определяет разрешающую способность привода с ШД по отработке углового перемещения во всех режимах работы привода. В общем случае шагом ШД называют угол поворота ротора при воздействии одного сигнала управления и установленной схеме коммутации. В режиме отработки единичных шагов – работе с низкой частотой управляющих импульсов f – положение ротора фиксируется с нулевой скоростью на каждом шаге.
В реальном многополюсном двигателе шаг меньше показанного на рис.4.2 в рм раз и определяется выражением
Число тактов коммутации Ктк зависит от числа обмоток управления mу и схемы управления:
где К1 – коэффициент, равный 1 при симметричной и 2 – при несимметричной коммутации; К2 – коэффициент, равный 1 при однополярной и 2 – при разнополярной коммутации .
Увеличение числа пар полюсов при неизменном диаметре ротора ограничено технологическими возможностями и увеличением потока рассеяния между полюсами, обычно рм =4 ÷ 6. Увеличение числа обмоток управления связано с усложнением коммутатора, обычно mу =2 ÷ 4. Поэтому у активных ШД αш составляет порядка десяти градусов. Дальнейшее уменьшение шага достигается либо механическим редуцированием с помощью специальных кинематических механизмов, либо специальными схемами электрического дробления шага.
Увеличение числа обмоток управления связано с усложнением коммутатора, обычно mу =2 ÷ 4. Поэтому у активных ШД αш составляет порядка десяти градусов. Дальнейшее уменьшение шага достигается либо механическим редуцированием с помощью специальных кинематических механизмов, либо специальными схемами электрического дробления шага.
Меньшая величина шага – порядка одного градуса– может быть получена у ШД реактивного и индукторного типа. У этих двигателей ротор изготавливается из обычной электротехнической стали, имеет на поверхности зубцы, число которых zp может быть достаточно большим, и
Однако у этих двигателей меньше вращающий момент.
Важным показателем переходных режимов (f=var – пуск, реверсирование, торможение) является приемистость ШД. Приемистость пуска – это наибольшая частота управляющих импульсов, отрабатываемых шаговым электродвигателем без потери шагов при пуске из состояния фиксированной стоянки под током.
По аналогии могут быть введены понятия приемистости торможения и реверсирования, их значения несколько отличаются от приемистости пуска.
Если пренебречь моментом трения Mƒт и рассматривать уравнение равновесия моментов на валу ШД при малых углах рассогласования осей ротора и МДС статора, то получим дифференциальное уравнение движения ротора:
Устройства с постоянными магнитами
Виды шаговых двигателей
Существует несколько разновидностей. К наиболее востребованным относятся модели с переменным магнитным сопротивлением, с постоянным магнитом и гибридные.
Устройства с переменным магнитным сопротивлением
Такие шаговые двигатели не имеют постоянных магнитов в роторе. Для изготовления ротора зубчатой формы используется магнитомягкий материал. Его вращение обеспечивается за счет замыкания магнитного поля статора через зубцы, располагающиеся вблизи полюсов. Зубцы к полюсам притягиваются и ротор поворачивается. Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Устройства с постоянными магнитами
На примере такого устройства выше разъяснялся принцип работы шаговых двигателей. В реальности роторы таких двигателей имеют несколько постоянных магнитов. От их количества зависит число шагов, за которое ротор выполняет полный оборот. Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Гибридные устройства
Если подключить к источнику постоянного тока катушки полюсов 1 — 1′, то ротор расположится вдоль этих полюсов. Если задействовать катушки полюсов 2 — 2′, а ка-тушки полюсов 1 — 1′ обесточить, то ротор повернется и займет положение вдоль полю-сов 2 — 2′. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 — 3′. Так, шагами, ротор будет следовать за своей обмоткой управления.
Каждые две катушки, расположенные на противоположных полюсах статора, образуют обмотку управления, включаемую, в сеть постоянного тока. Ротор — двухполюсный.
Если подключить к источнику постоянного тока катушки полюсов 1 — 1′, то ротор расположится вдоль этих полюсов. Если задействовать катушки полюсов 2 — 2′, а ка-тушки полюсов 1 — 1′ обесточить, то ротор повернется и займет положение вдоль полю-сов 2 — 2′. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 — 3′. Так, шагами, ротор будет следовать за своей обмоткой управления.
Преимущества шаговых двигателей
Преимуществом шаговых двигателей является то, что в них совершенно отсутствует самоход. Они поворачиваются и строго фиксируются с шагом, пропорциональным числу полюсов на статоре. Это качество делает его незаменимым в особо точных механизмах (для привода часов, механизмов подачи ядерного топлива в реакторах, в станках с ЧПУ и так далее).
Управление шаговыми двигателями ведется с применением различных электронных устройств (триггер Шмитта и другие).
Источники
http://robotosha.ru/electronics/how-stepper-motors-work.html
http://www.szemo.ru/press-tsentr/article/shagovye-dvigateli-vidy-printsip-raboty-sistema-upravleniya/
http://cable.ru/articles/id-1634.php
http://samelectrik.ru/chto-takoe-shagovyj-dvigatel-zachem-on-nuzhen-i-kak-rabotaet.html
http://ruaut.ru/content/publikacii/electro/printsip-raboty-shagovogo-elektroprivoda-i-shagovykh-elektrodvigateley-ikh-konstruktsiya-i-primeneni.html
http://electricalschool.info/spravochnik/maschiny/677-shagovye-dvigateli.html
http://24techno-guide.ru/shagovii-dvigatel—princip-raboti.php
http://zvondozvon.ru/tehnologii/rabota-sd
http://servomotors.ru/documentation/technical_means_of_automation_and_control/book/4_1.html
http://zaxis.ru/statyi/shagovyj-dvigatel-rabota-ustrojstvo.html
http://www.mtomd.info/archives/2696
Принцип устройства и виды шаговых двигателей
Для работы любого электро устройства нужны приводные механизмы. В системах, где требуется точность позиционирования, применяется шаговый двигатель. Расскажем подробнее в чем его отличие от обычного агрегата, принцип работы и какие есть виды.
В системах, где требуется точность позиционирования, применяется шаговый двигатель. Расскажем подробнее в чем его отличие от обычного агрегата, принцип работы и какие есть виды.
Содержание
В чем особенность шагового двигателя
Задача любого электродвигателя – преобразовать электроэнергию в механическую. Особенность шагового агрегата – способ вращения приводного вала. Он вращается непостоянно, а поступательно – шагами. Отсюда и появилось такое название устройства. Шаги – это части одного оборотного круга. Размер шажка зависит от технических характеристик и контроллера.
Вторая особенность – способ питания (импульсный). Каждый новый преобразуется в градус. Именно на эту величину и поворачивается вал. Узнать размер шага просто. Например, агрегат с маркировкой 1.80 каждую секунду (именно в такой промежуток подается импульс) совершает шаг на 1.8 градуса.
Шаговый двигатель – принцип работы
Основные узлы:
- статор – многофазный. Представлен катушками с обмоткой;
- ротор – магниты с ярковыраженными полюсами или тонкими зубьями. Без контактных кольцевых элементов и коллекторов
- разные типы шаговых агрегатов отличаются конструктивно – по способу присоединения обмоток. Очередность включения последних Например, простая конструкция двигателя с 4 обмотками, расположенными под прямым углом относительно друг друга. При этом катушки не соединены друг с другом. Катушки работают поочередно, угол поворота составляет 90 градусов. Ток идет каждую секунду, обеспечивая поворот вала на четверть оборота.
 Без контактных кольцевых элементов и коллекторов
Без контактных кольцевых элементов и коллекторовРабочие характеристики шагового двигателя
Как уже отмечалось – вал такого силового агрегата вращается циклично (шагами). Поэтому в его характеристиках отсутствует показатель мощности. Шаговый двигатель относят к маломощным агрегатам.
Для подобного устройства важной характеристикой является шаг ротора. Последний представляет собой угол поворота, совершаемый за один импульс. Шаг, в свою очередь, определяется количеством обмоток, способом их подключения, выраженностью полюсов или зубчиков. Менять шаг можно с помощью контроллера устройства.
Типы шаговых двигателей
Классификация шаговых двигателей на типы проводится по конструкции используемого ротора.
Реактивный
Особенности устройства:
- статор – шестиполюсный, трехфазный;
- ротор – четырехполюсный выраженный;
- шаг – 30 градусов.
Особенность данного типа – при работе реактивного двигателя отсутствует тормозящий вал момент. Применяются подобные типы устройств, когда не нужен высокий крутящий момент. В настоящее время применяется редко.
С постоянными магнитами
Особенности:
- ротор;
- статор – 2 фазы;
- шаг с большим градусом.
Две схемы управления – однополярная (проводка имеет ветку в центре), двухполярное (без дополнительных жил).
С переменным магнитным сопротивлением
Особенности:
- ротор – металлический диск с зубчиками без постоянного магнита;
- статор – более четырех катушек;
- запитка обмоток – противоположно расположенные пары;
- низкий крутящий момент;
- нет тормозящего момента.

Номинальный шаг такого типа двигателя в диапазоне 5-15 градусов.
Гибридный
Комбинаторный тип – на постоянных магнитах и переменным сопротивлением. Особенности:
- ротор – цилиндр, намагниченный по оси. Имеет радиальные зубчики;
- статор – 2 или 4 фазы;
- минимальный размер шага – 0.9-5 градусов;
- точность позиционирования;
- высокая стоимость.
Зубцы на полюсах соответствуют аналогичным выступам на втором элементе. Это необходимо для выравнивания дисков в нескольких положениях (по количеству зубьев с учетом отсутствующих). Зубья соседних полюсов у статора имеют смещение на четверть зубцового деления. Это нужно для уменьшения шагового размера.
Способы подключения обмоток
Все типы шаговых двигателей имеют несколько фаз. Чем их больше, тем большее количество катушек необходимо. Это улучшает работу агрегата, делая ее более плавной. Но скорость крутящего момента никак не связана с количеством фаз. Поэтому наиболее популярными стали двухфазные модели. Для них существует три разных типа подключения.
Поэтому наиболее популярными стали двухфазные модели. Для них существует три разных типа подключения.
Биполярный двигатель
Особенности:
- 4 выхода подключения;
- 2 желтых терминала – вертикальная обмотка;
- 2 красных – горизонтальная.
Недостаток схемы в том, что для изменения полярности магнитов придется менять направление тока. А значит – существенно усложнять схему.
Униполярный шаговый двигатель
Общий провод фиксируется с точкой, на которую запитаны две катушки. Один выход – простой способ смены полярности магнитов. Такие модели имеют пять или шесть клемм.
8-выводной шаговый двигатель
Наиболее удобная модель шагового двигателя для подключения и изменения полярности из-за наличия двустороннего выхода клемм. Имеет несколько вариантов подключения:
- униполярный с 5-6 клеммами;
- биполярный с любым способом соединения обмоток.
Еще один вариант – биполярный однофазный – нужен для слаботочных источников.
Способы управления
Управление шаговым двигателем возможно в разных режимах – по способам подачи тока на катушку.
Волновое
Полношаговый способ используется редко. В основном он необходим, если нужно снизить уровень энергопотребления. При подаче тока нагрузка на мотор незначительна из-за снижения вращающего момента. У такого двигателя четырехшаговый оборот. Это номинальное число.
Полношаговый режим
Подача напряжения на катушки попарное. С учетом способа их подключения (последовательно, параллельно) агрегату необходимо в два раза больше тока или напряжения по сравнению с тем, которого хватит для одной обмотки/. При полношаговом режиме мотор выдает 100 % номинала.
Режим в полшага
Дает возможность получить вдвойне точную систему позиционирования. Питание на все пары катушек идет одновременно. Итог – ротор обращается по 1\2 своего номинального шага.
Микрошаговый режим
Самый эффективный режим работы шагового агрегата. Питание на обмотку катушки подается не импульсно, а сигналами синусоидного типа. В результате движение вала становится максимально плавным – без рывков и щелчков. Изменения размера шагов не происходит.
В результате движение вала становится максимально плавным – без рывков и щелчков. Изменения размера шагов не происходит.
общие сведения, принцип работы мотора
Практически все электрические приборы функционируют с помощью приводных механизмов. Они могут иметь различное строение и принцип работы, а также особенности настраивания. Существуют разные типы таких приспособлений. Одним из наиболее востребованных и доступных по цене считается биполярный шаговый двигатель, благодаря которому можно обеспечить реализацию систем точного позиционирования.
- Общие сведения
- Принцип работы
- Основные режимы
- Разновидности приспособления
- Прибор с переменными магнитами
- Гибридные модели
- Двухфазные моторы
- Другие типы устройств
Общие сведения
Существует две разновидности приспособления: униполярный шаговый двигатель и биполярный. Устройство представляет собой синхронный бесщеточный электродвигатель, имеющий одну или несколько обмоток. Ток, который подается на обмотки статора, вызывает фиксацию ротора, благодаря чему осуществляются его дискретные угловые перемещения или шаги.
Ток, который подается на обмотки статора, вызывает фиксацию ротора, благодаря чему осуществляются его дискретные угловые перемещения или шаги.
Первые модели таких приспособлений появились еще в 30-е годы XIX века и представляли собой своеобразный магнит, приводящий в движение храповое колесо. Во время включения оно перемещалось на величину зубцового шага. Раньше механизм использовался на кораблях военного флота Великобритании с целью перемещения торпед в нужную сторону.
Через несколько лет и армия США переняла это приспособление и стала активно применять его в своих военных кораблях и других механизмах. В 1919 году шотландец Уолкер получил патент на двигатель с ротором.
В настоящее время подобные механизмы востребованы и часто применяются. Шаговый мотор используется для обеспечения бесперебойного функционирования шлифовального и фрезерного станков, различных бытовых приборов, производственных механизмов и транспорта, а также жестких дисков персональных компьютеров. Именно поэтому он так востребован. Устройство состоит из нескольких частей:
Именно поэтому он так востребован. Устройство состоит из нескольких частей:
- контролер, предназначенный для регулирования работы шагового привода;
- специальные магнитные части;
- обмотки;
- панель, выполняющая роль блока управления;
- сигнализаторы и передатчики, благодаря которым работа устройства отлаженная и бесперебойная.
Биполярные двигатели имеют только одну обмотку в одной фазе, тогда как униполярные содержат две. Первые считаются более сложными в управлении, но обеспечивают плавную работу устройства.
Принцип работы
Шаговый двигатель работает по простым принципам. Первый этап — приложение напряжения к клеммам. Благодаря этому щетки на самом устройстве начинают постоянно двигаться. Двигатель холостого хода имеет свойство преобразовывать входящие импульсы.
Эти импульсы имеют прямоугольную направленность и преображение идет в заранее определенное положение ведущего вала, который к нему приложен. Вследствие этого вал перемещается под определенным углом. Оснащенные подобным редуктором приспособления довольно эффективны и надежны при условии наличия нескольких электромагнитов. Находиться они должны вокруг центральной детали из железа, имеющей зубчатую форму.
Вследствие этого вал перемещается под определенным углом. Оснащенные подобным редуктором приспособления довольно эффективны и надежны при условии наличия нескольких электромагнитов. Находиться они должны вокруг центральной детали из железа, имеющей зубчатую форму.
Внешняя цепь, отвечающая за управление, подает сигнал к магниту. При возникновении необходимости повернуть вал в ту или иную сторону тот электромагнит, на который был послан импульс, начинает быстро притягивать к себе зубья колеса. Они постепенно выравниваются с этим элементом, но смещаются по отношению к другим магнитным частям приспособления.
После выключения первого электромагнита включается второй и начинается беспрерывное движение шестеренки. Благодаря этому деталь выравнивается с предыдущим колесом. Такой цикл повторяется необходимое количество раз. Каждый из них и называется постоянным шагом. Именно поэтому двигатель получил такое название. Вычислить скорость его работы можно с помощью подсчета шагов, которые необходимы для обеспечения полного цикла.
Контролировать работу приспособления можно с помощью специального драйвера. Обычно это необходимо в случае настраивания станка или ветрогенератора.
Основные режимы
Изделие функционирует в нескольких режимах, которые предварительно настраиваются в зависимости от потребностей человека. Наиболее распространенными считаются следующие:
- Волновой режим предполагает протекание электрического тока только через одну обмотку. Сегодня он используется редко, для того чтобы снизить нагрузку на двигатель и количество потребляемой электроэнергии.
- Полношаговый — используется гораздо чаще и считается стандартным режимом для этого типа двигателя. Напряжение на обмотке при такой работе одинаково и приспособлению требует максимальное напряжение для корректного функционирования.
- Полушаговый режим — один из оригинальных способов изменить работу приспособления и при этом не затрагивать блок управления. Заключается в одновременном запитывании всех пар обмоток, что приводит к повороту ротора на половину своего обычного шага. Используя этот метод, можно получить двигатель с двойной мощностью при минимальных затратах электроэнергии. Он будет меньше изнашиваться и прослужит дольше, чем тот, что постоянно работает в полношаговом режиме.
- Микрошаговый режим сегодня считается наиболее часто применяемым при использовании шагового двигателя. Принцип действия заключается в подаче на обмотку не импульса, а сигнала, напоминающего синусоиду по форме. Такой режим делает работу двигателя более плавной, а переход от одного шага к другому незаметным. Благодаря этому уменьшаются рывки и скачки приспособления, оно может функционировать как обычный двигатель постоянного тока.
 Заключается в одновременном запитывании всех пар обмоток, что приводит к повороту ротора на половину своего обычного шага. Используя этот метод, можно получить двигатель с двойной мощностью при минимальных затратах электроэнергии. Он будет меньше изнашиваться и прослужит дольше, чем тот, что постоянно работает в полношаговом режиме.
Заключается в одновременном запитывании всех пар обмоток, что приводит к повороту ротора на половину своего обычного шага. Используя этот метод, можно получить двигатель с двойной мощностью при минимальных затратах электроэнергии. Он будет меньше изнашиваться и прослужит дольше, чем тот, что постоянно работает в полношаговом режиме.Последний режим имеет преимущество, поскольку представляет собой скорее метод подпитки двигателя, а не управления обмотками. Именно поэтому может использоваться при волновом или полношаговом способе работы приспособления. Если рассмотреть схему функционирования прибора в микрошаговом режиме, может показаться, что шаги становятся больше. На самом деле это не так, но процесс все равно становится плавным и отсутствуют рывки.
Если рассмотреть схему функционирования прибора в микрошаговом режиме, может показаться, что шаги становятся больше. На самом деле это не так, но процесс все равно становится плавным и отсутствуют рывки.
Разновидности приспособления
В зависимости от некоторых деталей различают несколько типов шаговых двигателей. Каждый из них имеет некоторые особенности функционирования.
Двигатель с постоянным магнитом считается наиболее популярным, отличается простотой настройки и эксплуатации. Устройство несет в себе магнит круглой формы, напоминающий диск и имеющий разные полюса. Обмотки статора при включении прибора притягивают и отталкивают магнит на роторе, что и обеспечивает кручение механизма.
При использовании такого типа двигателя величина шага измеряется, и показатель колеблется в пределах 45−90 градусов. Простота применения приспособления делает его востребованным, а длительный срок службы позволяет не думать о частой замене.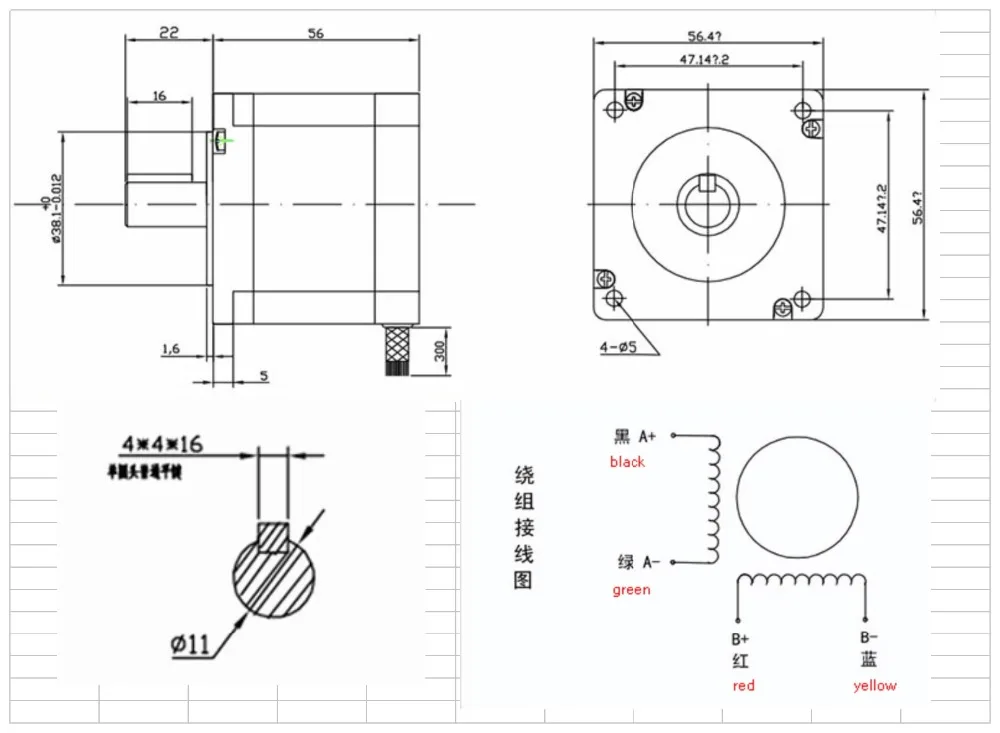
Прибор с переменными магнитами
Такие приспособления не имеют на роторе специального магнита. Эта деталь изготовлена из магнитного, мягкого металла, имеет форму зубчатого диска, напоминающего шестеренку. На статоре расположено более четырех разных обмоток. Запитываются они в противоположных парах и притягивают к себе ротор.
Стоит отметить, что величина крутящегося момента несколько снижается, поскольку в устройстве отсутствует постоянный магнит. Это считается недостатком, но есть и достоинство, поскольку при работе приспособления нет момента стопора.
Стопорящий момент заключается во вращении, создаваемом расположенными на роторе постоянными магнитами. Они притягиваются к статору, а именно к его арматуре при отсутствии в обмотках электрического тока. Зафиксировать этот момент просто — необходимо попытаться рукой повернуть двигатель в отключенном состоянии. При этом обычно слышны щелчки на каждом шаге. Диапазон шага в таком двигателе колеблется в пределах 5−15 градусов.
Гибридные модели
Название свое этот тип приспособлений получил из-за особенности работы, которая предполагает сочетание принципов шагового двигателя с постоянными и переменными магнитами. Обладает хорошими удерживающими и динамическими крутящими моментами. Достоинством прибора считается минимальная величина шага, которая не превышает показатель в 5 градусов. Именно благодаря этому обеспечивается максимальная точность.
Механические части приспособления вращаются гораздо быстрее, чем в других моделях с подобным принципом работы. Часто используются в станках для производства. Главным недостатком такого двигателя считается его высокая стоимость.
Известно, что обычный мотор с 8 обмотками будет иметь по 50 положительных и отрицательных полюсов, но произвести такой магнит невозможно. Именно поэтому устройство гибридного двигателя включает в себя 2 магнитных диска, каждый имеет 50 зубцов, а также постоянный магнит цилиндрической формы.
 com/embed/scKJoANUNx8″>
com/embed/scKJoANUNx8″>
Диски в процессе изготовления прибора привариваются к разным полюсам этого цилиндрического магнита и получается, что один из них на каждом из своих зубьев имеет положительный полюс, а другой — отрицательный. Если смотреть на конструкцию сверху, она выглядит как один диск, имеющий 100 зубьев.
На один оборот такого двигателя приходится 75 шагов, каждый из которых имеет показатель не более, чем 1,5 градуса.
Двухфазные моторы
Двухфазный шаговый двигатель очень прост в использовании, установить его и настроить может даже человек без опыта и соответствующих навыков. Приспособление имеет два типа обмотки для катушек:
- Униполярная заключается в установке одной обмотки, а также специального магнитного крана в центре, влияющего на любую фазу. Каждая секция включается для обеспечения необходимого направления магнитного поля. Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
- Биполярные типы моторов имеют только одну обмотку. Электрический ток в нее поступает особенным переломным методом посредством полюса, обеспеченного магнитом. На любую фазу приходится два разных провода. Устройство несколько сложнее, чем в униполярных моделях, но эффективность выше.
 На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.Существуют также трехфазные двигатели, имеющие узкую область использования: дисководы, различные фрезерные станки, принтеры и некоторые автомобили, где используется необычная заслонка.
Другие типы устройств
Главная особенность реактивных приспособлений — маленький шаг, который достигает не более 1 градуса, а также расположение зубцов, находящихся на полюсах статора. Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Для изготовления такого прибора понадобится специальный коммутатор, поэтому стоимость его высока. Самостоятельное создание также исключается по причине сложности конструкции.
Синхронные линейные шаговые моторы используются в случае, когда необходимо автоматизировать производственный процесс. Для этого следует обеспечить перемещение объектов в плоскости. С этой целью применяется специальный преобразователь, который изменяет вращательное движение на поступательное. Достичь этого можно путем использования кинематики.
Именно с этой целью и применяется линейный двигатель, преобразующий импульсы в перемещение по одной линии. Помимо автоматизации процесса, приспособление упростит кинематическую схему проводов. В таком приборе статор изготовлен из мягкого магнитного металла, а также имеется постоянный магнит. Стабильная работа двигателя осуществляется при условии постоянной подачи импульсов на обмотки.
Шаговые моторы — универсальные приспособления, обеспечивающие бесперебойное функционирование множества электрических приборов и производственного оборудования.
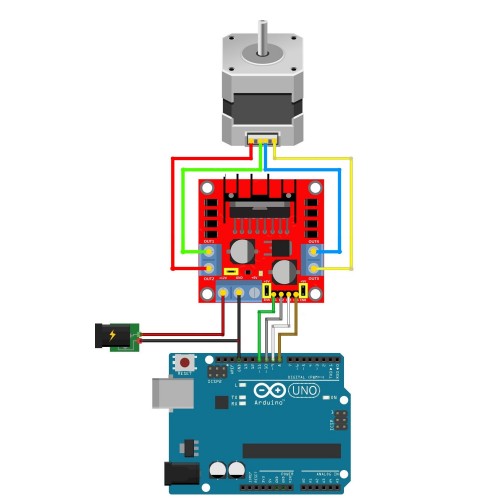
Драйвер шагового двигателя — как выбрать?
Драйвер шагового двигателя
Краткое введение в теорию и типы драйверов, советы по подбору оптимального драйвера для шагового двигателя.
Если вы хотите купить драйвер шагового двигателя, нажмите на информер справа
Некоторые сведения, которые могут помочь вам выбрать драйвер шагового двигателя.
Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя.
Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach4 или LinuxCNC.
>Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach4 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
2) Двухуровневые драйверы
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
3) Драйверы с ШИМ.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.
Как выбрать драйвер шагового двигателя (ШД)
Первый параметр, на который стоит обратить внимание, когда вы решили выбрать драйвер шагового двигателя – это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но стоит драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя. Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15-40% больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель, с другой – не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Второй момент – это напряжение питания. Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно – напряжение питания влияет на динамику(момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8-10. Если максимальное указанное напряжение питания драйвера резко отличается от данных величин – стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя — тем большее напряжение требуется для драйвера. Существует эмпирическая формула U = 32 * sqrt(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера: U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы EM706, AM882, YKC2608M-H.
Третий аспект – наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер – устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер – устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Четвертый аспект – наличие механизмов подавления резонанса. Резонанс шагового двигателя – явление, которое проявляется всегда, разница только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и – встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга – такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга – такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Пятый аспект – протокольная часть. Надо убедиться, что драйвер работает по нужному вам протоколу, а уровни входных сигналов совместимы с требуемыми Вам логическими уровнями. Эта проверка идет пятым пунктом, потому что за редким исключением подавляющее число драйверов работает по протоколу STEP/DIR/ENABLE и совместимо с уровнем сигналов 0..5 В, вам надо только лишь на всякий случай убедиться..jpg)
Шестой аспект – наличие защитных функций. Среди них защита от превышения питающего напряжения, тока обмоток(в т.ч. от короткого замыкания обмоток), от переполюсовки питающего напряжения, от неправильного подключения фаз шагового мотора. Чем больше таких функций — тем лучше.
Седьмой аспект – наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако, из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако, практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, при прочих равных условиях стоит использовать деление чем больше, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов – так, для драйвера со входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало.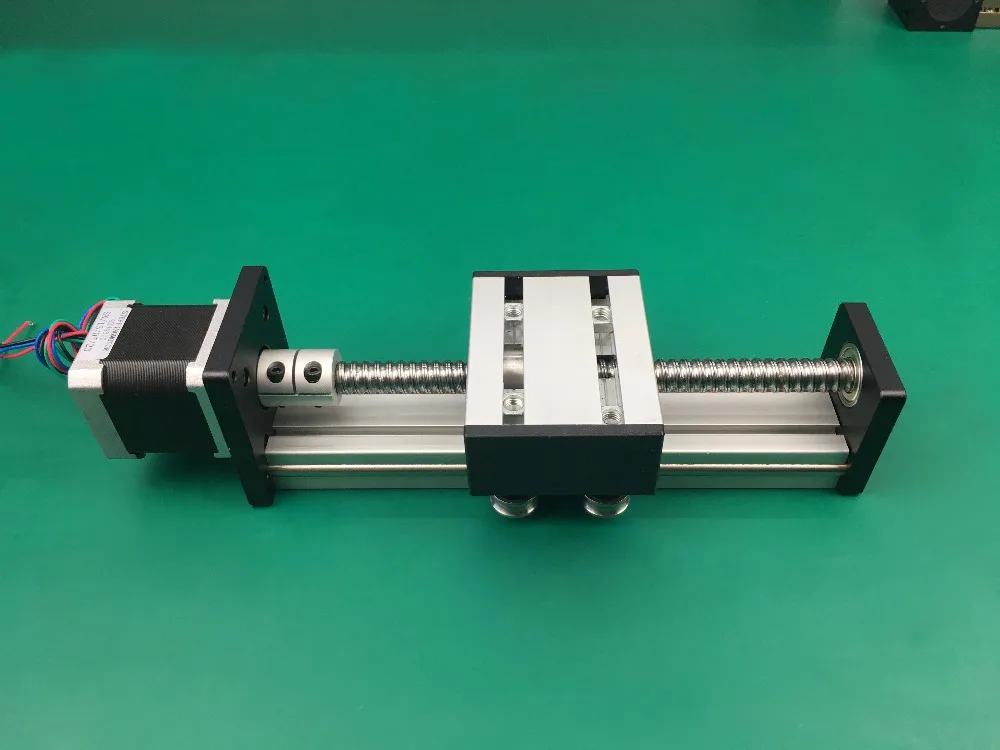 Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Восьмой аспект – наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т.п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Девятый, и самый важный аспект – качество драйвера. Оно практически не связано с характеристиками и т.п. На рынке существует множество предложений, и иногда характеристики драйверов двух производителей совпадают практически до запятой, а установив их по очереди на станок, становится ясно, что один из производителей явно занимается не своим делом, и в производстве недорогих утюгов ему больше повезет. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом — ориентироваться на бренды.
Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом — ориентироваться на бренды.
В разработке электроники для шаговых двигателей давно удерживает пальму первенства корпорация Leadshine, продукцию которой мы и рекомендуем использовать в станках с ЧПУ.
DARXTON
виды, плюсы, минусы, альтернативы — MULTICUT
Одно из главных отличий современного станка с ЧПУ от «классических» моделей с ручным управлением – отсутствие кинематической связи между механизмами, отвечающими за перемещение рабочих органов и вращение шпинделя. Раздельный привод позволяет отказаться от использования многоступенчатых коробок передач, механических делительных головок, доверить сложные расчеты компьютеру. Но чтобы перемещения были точными, а станок всегда понимал, в какой точке находится режущий инструмент в текущий момент времени, привод должен иметь вполне определенные параметры. В механизмах станка с ЧПУ лучше всего с этими задачами справляются шаговые двигатели: компактные «послушные» в управлении и сравнительно недорогие.
Но чтобы перемещения были точными, а станок всегда понимал, в какой точке находится режущий инструмент в текущий момент времени, привод должен иметь вполне определенные параметры. В механизмах станка с ЧПУ лучше всего с этими задачами справляются шаговые двигатели: компактные «послушные» в управлении и сравнительно недорогие.
В этой статье мы расскажем о работе этих устройств, постараемся найти их недостатки и подобрать альтернативные варианты.
Как работает шаговый двигатель?
Наиболее важная конструктивная особенность шагового двигателя – явно выраженные магнитные полюса. На статоре их роль играют сердечники обмоток. Ротор выглядит как зубчатое колесо: выступы на его поверхности – это тоже полюса (постоянных магнитов). Благодаря такой конструкции шаговый двигатель способен совершать дискретные угловые перемещения с остановкой в определенном положении. Связанный с ним через передачу винт-гайка узел станка совершает заданное линейное перемещение.
Управляющий сигнал для шагового двигателя представляет собой последовательность импульсов. Их количество кратно числу шагов, которые совершает ротор. Система управления станка знает, сколько импульсов было послано на двигатель, и может посчитать текущее положение исполнительного механизма.
У шаговых двигателей обширный перечень преимуществ. Самые важные из них:
- Доступная стоимость. Такие приводы применяются не только в промышленных станках, но и в бытовой технике. Например, на маломощные самодельные станки часто устанавливают шаговые двигатели, снятые с принтеров.
- Надежность. Благодаря отсутствию щеток и применению подшипников с избыточным рабочим ресурсом вывести из строя шаговый двигатель достаточно сложно. Перегрузки приводят к пропуску шагов, но не повреждают двигатель.
- Высокая скорость отклика на управляющий сигнал. Старт, торможение и реверсирование происходят практически мгновенно из-за того, что максимальный момент двигатель развивает при скоростях, близких к нулю.

Есть у таких приводов и недостатки:
- На обмотках двигателя всегда есть напряжение, то есть он постоянно потребляет энергию.
- Крутящий момент зависит от частоты вращения, и на высоких скоростях он значительно падает.
- Эффект резонанса — падение момента на некоторых частотах вращения. При чем резонансная частота непостоянна и зависит от величины нагрузки.
- При пропуске шагов система ЧПУ не сможет правильно определить положение исполнительного механизма, если шаговый привод работает без обратной связи.
Типы шаговых приводов
Существует два типа шаговых приводов:
- Униполярные. Обмотки статора имеют от 5 до 8 выводов. Двигатель включается в работу посредством их коммутации при помощи простейшего драйвера с четырьмя ключами.
- Биполярные. В таком моторе всего 4 вывода, и для изменения параметров магнитного поля им нужна более сложная система управления.
Биполярные двигатели развивают большие моменты на валу, чем униполярные, при сравнимых массово-габаритных характеристиках, поэтому их в станках с ЧПУ можно увидеть значительно чаще.
Как выбрать шаговый двигатель для ЧПУ станка?
Самостоятельный выбор шагового двигателя для ЧПУ станка привода — работа сложная и требующая точных расчетов. Он должен преодолеть силу трения в ШВП или передаче винт-гайка, инерцию портала и рабочую нагрузку, которая зависит от свойств обрабатываемой детали и режима резания. Также нужно учесть геометрические параметры присоединительного фланца, вала и корпуса. Важный момент – анализ графика зависимости крутящего момента от частоты вращения. Именно здесь ошибки приводят к пропуску шагов.
Тем, кто все же решился собрать станок самостоятельно, мы рекомендуем посмотреть характеристики приводов готовых моделей, близких по размерам и поставленным задачам.
Альтернативные варианты
Единственный конкурент шагового двигателя в ЧПУ станке — сервомотор. Его установка требует реализации более сложной схемы управления с обратной связью (энкодером). Есть у него и другие недостатки. Выбор между сервоприводом и шаговым двигателем для ЧПУ станка вызывает много вопросов у начинающих станочников и споров на форумах. Чтобы определить оптимальный состав привода, нужно учесть следующие факторы:
Его установка требует реализации более сложной схемы управления с обратной связью (энкодером). Есть у него и другие недостатки. Выбор между сервоприводом и шаговым двигателем для ЧПУ станка вызывает много вопросов у начинающих станочников и споров на форумах. Чтобы определить оптимальный состав привода, нужно учесть следующие факторы:
- Стоимость. При жестких ограничениях в бюджете широкий выбор отсутствует в принципе, и считается, что шаговый двигатель значительно дешевле сервомотора. Но это справедливо для устройств небольших типоразмеров. Чем больше мощность, тем меньше разница в цене, а у некоторых крупных моделей стоимость моторов обоих типов сопоставима.
- Массово-габаритные характеристики станка. Чем больше станок, тем большая мощность нужна для перемещения рабочих органов. Склонность к резонансным явлениям сильнее проявляется у мощных шаговых двигателей, что может привести к пропуску шагов и снижению точности обработки. Для фрезерных станков с ЧПУ рекомендуется выбирать серводвигатели, если масса портала превышает 50 кг.
- Сложность настройки. Схемы приводов с обратной связью требуют точной наладки и высокой квалификации оператора. Если требуется самое простое решение, оптимальным выбором для станка с ЧПУ будет шаговый двигатель.
- Вероятность перегрузок и заклинивания. Считается, что при заклинивании серводвигатель обязательно выйдет из строя. Это не совсем так. Если станок настроен правильно, драйвер не пошлет сигнал на повторную отработку перемещения, выполнение программы прекратится, и стойка перейдет в режим ожидания до вмешательства оператора или наладчика. Шаговые двигатели при перегрузке могут пропустить несколько шагов. Из-за отсутствия обратной связи СЧПУ не узнает об этом и продолжит отсчитывать шаги дальше. Пропуск нескольких шагов при кратковременном заклинивании – это бракованная деталь на выходе. Потеря шагов также возможна при внешних вибрационных воздействиях и ударах.
- Скорость перемещения. В массивных ЧПУ станках с шаговыми двигателями скорость движения портала обычно не превышает 9 м/мин. Если материал заготовки и режущий инструмент позволяют назначить режим обработки на более высоких скоростях, то мотор будет «узким местом», ограничивающим производительность. Тот же портал с приводом от серводвигателя аналогичного типоразмера сможет развить скорость до 60 м/мин.
- Рабочие ускорения. Чрезмерный разгон шагового двигателя неизбежно приведет к пропуску шагов. Если предполагается работа на высоких ускорениях, лучше выбрать сервомотор.
- Нагрузка на передачу в момент остановки. В тяжелых станках с ЧПУ шаговые двигатели часто устанавливают на механизмы вертикального перемещения шпинделя. Ротор затормаживается магнитными силами после остановки. Сервопривод в остановленном положении совершает колебания, что очень нежелательно. Шаговый двигатель хорошо ведет себя в механизмах поворота заготовки (4-ой оси), кода требуется удерживать ее в стационарном положении.
 Если материал заготовки и режущий инструмент позволяют назначить режим обработки на более высоких скоростях, то мотор будет «узким местом», ограничивающим производительность. Тот же портал с приводом от серводвигателя аналогичного типоразмера сможет развить скорость до 60 м/мин.
Если материал заготовки и режущий инструмент позволяют назначить режим обработки на более высоких скоростях, то мотор будет «узким местом», ограничивающим производительность. Тот же портал с приводом от серводвигателя аналогичного типоразмера сможет развить скорость до 60 м/мин.
Какие двигатели применяются в станках MULTICUT?
Надежность конструкции – основной критерий, по которому инженеры компании MULTICUT оценивают комплектующие для станков от сторонних производителей. В выборе двигателей для механизмов перемещения не допускаются компромиссы в качестве.
В выборе двигателей для механизмов перемещения не допускаются компромиссы в качестве.
По умолчанию на все станки устанавливаются шаговые приводы MIGE и контроллеры YAKO. Базовая комплектация выбрана исходя из пожеланий заказчиков и анализа оборудования конкурентов. Приводы демонстрируют высокие крутящие моменты и динамику. Станок стабильно работает на ускорениях до 1,5 м/с2. Двигатели работают в микрошаговом режиме с точностью 300 шагов на оборот. В сочетании с редуктором с передаточным отношением 5 аппаратная точность позиционирования составляет 6 мкм. «Шаговость» никак не отражается даже на самых мелких деталях.
Пройти тест
В качестве опции заказчику предлагаются сервоприводы DELTA серии ASDA-B2. Эти двигатели отличаются отличной управляемостью: положение, момент и скорость могут регулироваться сигналом задания. По динамическим характеристикам эти моторы значительно превосходят более дорогие аналоги. Разгон от -3000 до + 3000 оборотов в минуту на холстом перемещении составляет около 10 мс. В тех моделях, которые мы устанавливаем на станки, есть тормозной резистор. В энкодер с разрешением 160000 импульсов на оборот встроен цифровой модуль управления, который позволяет оперативно выполнить конфигурирование мотора.
В тех моделях, которые мы устанавливаем на станки, есть тормозной резистор. В энкодер с разрешением 160000 импульсов на оборот встроен цифровой модуль управления, который позволяет оперативно выполнить конфигурирование мотора.
Если станок рассчитан на работу в высоконагруженных режимах, от него требуется хорошая производительность, то мы рекомендуем выбирать сервоприводы ESTUN. Интеллектуальные силовые модули промышленного класса, используемые в конструкции двигателей, позволяют им выдерживать перегрузки по току, развивать высокие моменты во время пуска. Производитель реализовал функцию подавления вибрации, сделал настройку простой и удобной, а двигатель — отзывчивым и точным в работе.
На настольные станки 500-й серии мы устанавливаем привода мощностью 200 Вт (на каждую ось). В базовой комплектации крупногабаритных моделей мощность шаговых двигателей составляет 400 Вт. Для всех серий станков в сервоисполнении мы предлагаем моторы мощностью 0,75 и 1 кВт.
Чтобы получить консультации по вопросам выбора и комплектации станков MULTICUT, позвоните по контактному телефону в вашем регионе.
Как работают шаговые двигатели
На рисунках ниже показаны два поперечных сечения 5-фазного шагового двигателя. Шаговый двигатель состоит в основном из двух частей: статора и ротора. Ротор состоит из трех компонентов: ротора 1, ротора 2 и постоянного магнита. Ротор намагничен в осевом направлении, так что, например, если ротор 1 поляризован на север, ротор 2 будет поляризован на юг.
Статор имеет десять магнитных полюсов с маленькими зубьями, каждый полюс снабжен обмоткой. Каждая обмотка соединена с обмоткой противоположного полюса, так что оба полюса намагничиваются с одинаковой полярностью, когда ток проходит через пару обмоток. (Пропускание тока через данную обмотку намагничивает противоположную пару полюсов той же полярности, то есть северной или южной.)
Пара противоположных полюсов составляет одну фазу. Поскольку имеется пять фаз от A до E, двигатель называется «5-фазным шаговым двигателем».
Поскольку имеется пять фаз от A до E, двигатель называется «5-фазным шаговым двигателем».
По внешнему периметру каждого ротора имеется 50 маленьких зубьев, при этом маленькие зубья ротора 1 и ротора 2 механически смещены друг относительно друга на половину шага зубьев.
Возбуждение: Для подачи тока через обмотку двигателя
Магнитный полюс: Выступающая часть статора, намагниченная возбуждением
Малые зубья: Зубья на роторе и статоре
Принцип работы
Ниже приводится пояснение взаимосвязи между малыми зубьями намагниченного статора и малыми зубьями ротора.
При возбуждении фазы «А»
При возбуждении фазы А ее полюса поляризованы на юг. Это притягивает зубья ротора 1, поляризованные на север, и отталкивает зубья ротора 2, поляризованные на юг. Следовательно, силы, действующие на весь блок в равновесии, удерживают ротор в неподвижном состоянии. В это время зубцы полюсов фазы В, которые не возбуждены, смещены с южнополяризованными зубьями ротора 2 так, что они смещены на 0,72˚. Это суммирует взаимосвязь между зубьями статора и зубьями ротора при возбужденной фазе А.
В это время зубцы полюсов фазы В, которые не возбуждены, смещены с южнополяризованными зубьями ротора 2 так, что они смещены на 0,72˚. Это суммирует взаимосвязь между зубьями статора и зубьями ротора при возбужденной фазе А.
При возбуждении фазы «B»
Когда возбуждение переключается с фазы A на B, полюса фазы B поляризованы на север, притягивая южную полярность ротора 2 и отталкивая северную полярность ротора 1.
Другими словами, при переключении возбуждения с фазы А на В ротор поворачивается на 0,72˚. Когда возбуждение переходит от фазы A к фазам B, C, D и E, а затем обратно к фазе A, шаговый двигатель вращается точно с шагом 0,72˚. Чтобы вращаться в обратном направлении, измените последовательность возбуждения на фазы A, E, D, C, B, а затем обратно на фазу A.
Высокое разрешение 0,72˚ присуще механическому смещению между статором и ротором, что обеспечивает точное позиционирование без использования энкодера или других датчиков. Достигается высокая точность остановки }3 угловых минуты (без нагрузки), поскольку единственными факторами, влияющими на точность остановки, являются различия в точности обработки статора и ротора, точности сборки и сопротивлении обмоток постоянному току.
Достигается высокая точность остановки }3 угловых минуты (без нагрузки), поскольку единственными факторами, влияющими на точность остановки, являются различия в точности обработки статора и ротора, точности сборки и сопротивлении обмоток постоянному току.
Драйвер выполняет роль переключателя фаз, а его синхронизация управляется импульсно-сигнальным входом в драйвер. В приведенном выше примере показано, что возбуждение продвигается вперед по одной фазе за раз, но в реальном шаговом двигателе эффективное использование обмоток достигается за счет одновременного возбуждения четырех или пяти фаз.
Основные характеристики шаговых двигателей
Важным моментом, который следует учитывать при применении шаговых двигателей, является соответствие характеристик двигателя условиям эксплуатации.
В следующих разделах описываются характеристики, которые следует учитывать при применении шаговых двигателей.
Двумя основными характеристиками производительности шагового двигателя являются:
- Динамические характеристики: Это пусковые и вращательные характеристики шагового двигателя, в основном влияющие на движение механизма и время цикла.
- Статические характеристики: Это характеристики, относящиеся к изменениям угла, которые происходят, когда шаговый двигатель находится в режиме покоя, влияя на уровень точности оборудования.
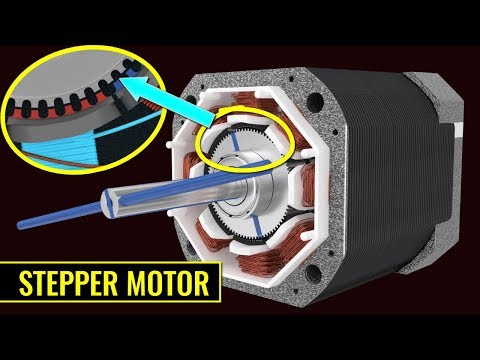
Динамические характеристики
Характеристики скорости – крутящего момента На рисунке выше представлен график характеристик, показывающий взаимосвязь между скоростью и крутящим моментом приводимого шагового двигателя. Эти характеристики всегда учитываются при выборе шагового двигателя. Горизонтальная ось представляет скорость на выходном валу двигателя, а вертикальная ось представляет крутящий момент. Характеристики скорость-крутящий момент определяются двигателем и приводом, и на них сильно влияет тип используемого привода.
- Максимальный удерживающий момент (TH) Максимальный удерживающий момент — это максимальная удерживающая мощность (крутящий момент) шагового двигателя при подаче питания (при номинальном токе), когда двигатель не вращается.

- Момент отрыва Момент отрыва — это максимальный крутящий момент, который может быть выдан при заданной скорости. При выборе двигателя убедитесь, что требуемый крутящий момент находится в пределах этой кривой.
- Максимальная пусковая частота (fS) Это максимальная импульсная скорость, при которой двигатель может запуститься или остановиться мгновенно (без времени разгона/торможения), когда фрикционная и инерционная нагрузка шагового двигателя равны 0. Привод двигателя на импульсной скорости, превышающей эту скорость, потребует постепенное ускорение или замедление. Эта частота будет уменьшаться, когда к двигателю добавляется инерционная нагрузка. См. характеристики инерционной нагрузки – пусковой частоты ниже.
Максимальная частота отклика (fr) Это максимальная импульсная скорость, при которой двигатель может работать посредством постепенного ускорения или замедления, когда нагрузка трения и инерционная нагрузка шагового двигателя равны 0.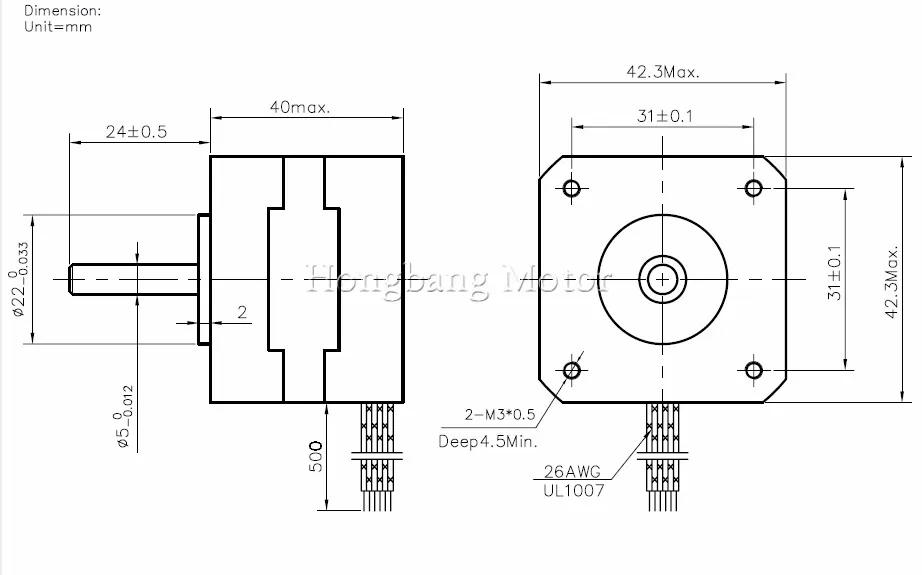 На рисунке ниже показаны характеристики скорость-крутящий момент 5-фазного шагового двигателя и комплекта драйвера. .
На рисунке ниже показаны характеристики скорость-крутящий момент 5-фазного шагового двигателя и комплекта драйвера. .
Инерционная нагрузка – Характеристики пусковой частоты Эти характеристики показывают изменения пусковой частоты, вызванные инерцией нагрузки. Поскольку ротор шагового двигателя и нагрузка имеют свой собственный момент инерции, на оси двигателя возникают задержки и опережения во время мгновенного пуска и остановки. Эти значения изменяются в зависимости от скорости импульса, но двигатель не может следовать скорости импульса за пределами определенной точки, что приводит к ошибкам. Скорость импульса непосредственно перед возникновением оплошности называется начальной частотой.
Изменения максимальной пусковой частоты при инерционной нагрузке можно аппроксимировать следующей формулой:
Характеристики вибрации
Шаговый двигатель вращается посредством серии шаговых движений. Шаговое движение может быть описано как одношаговая реакция, как показано ниже:
1. Одиночный импульс, поступающий на шаговый двигатель в состоянии покоя, ускоряет двигатель до следующего положения остановки.
Одиночный импульс, поступающий на шаговый двигатель в состоянии покоя, ускоряет двигатель до следующего положения остановки.
2. Ускоренный двигатель вращается через положение остановки, промахивается на определенный угол и отводится назад в обратном направлении.
3. Двигатель останавливается в заданном положении остановки после затухающих колебаний.
Вибрация на низких скоростях вызвана ступенчатым движением, которое создает этот тип демпфирующих колебаний. На приведенном ниже графике характеристик вибрации представлена величина вибрации двигателя при вращении. Чем ниже уровень вибрации, тем плавнее будет вращение двигателя.
Статические характеристики
Угловые характеристики крутящего момента: Характеристики «угол-крутящий момент» показывают взаимосвязь между угловым смещением ротора и крутящим моментом, приложенным извне к валу двигателя, когда двигатель возбуждается номинальным током. Кривая для этих характеристик показана ниже:
На следующих рисунках показано положение зубьев ротора и статора в пронумерованных точках на приведенной выше диаграмме. При устойчивом положении в точке (1) внешнее приложение силы к валу двигателя создаст крутящий момент T (+) в левом направлении, пытаясь вернуть вал в устойчивую точку (1). Вал остановится, когда внешняя сила сравняется с крутящим моментом в точке (2).
При устойчивом положении в точке (1) внешнее приложение силы к валу двигателя создаст крутящий момент T (+) в левом направлении, пытаясь вернуть вал в устойчивую точку (1). Вал остановится, когда внешняя сила сравняется с крутящим моментом в точке (2).
При приложении дополнительной внешней силы существует угол, при котором создаваемый крутящий момент достигает своего максимума в точке (3). Этот крутящий момент называется максимальным удерживающим крутящим моментом TH.
Приложение внешней силы, превышающее это значение, приведет ротор в неустойчивую точку (5) и выше, создав крутящий момент T (-) в том же направлении, что и внешняя сила, так что он переместится в следующую устойчивую точку ( 1) и останавливается.
Стабильные точки: Точки, где ротор останавливается, при этом зубья статора и зубья ротора точно выровнены. Эти точки чрезвычайно стабильны, и ротор всегда будет останавливаться там, если не будет приложена внешняя сила.
Нестабильные точки: Точки, в которых зубья статора и ротора смещены на полшага. Ротор в этих точках будет двигаться к следующей устойчивой точке влево или вправо даже при малейшей внешней силе.
Ротор в этих точках будет двигаться к следующей устойчивой точке влево или вправо даже при малейшей внешней силе.
Угловая точность
В условиях отсутствия нагрузки шаговый двигатель имеет угловую точность в пределах ±3 угловых минуты (±0,05˚). Небольшая ошибка возникает из-за разницы в механической точности статора и ротора, а также из-за небольшой разницы в сопротивлении обмотки статора постоянному току. Как правило, угловая точность шагового двигателя выражается в терминах точности положения остановки.
Точность положения остановки: Точность положения остановки представляет собой разницу между теоретическим положением остановки ротора и его фактическим положением остановки. За исходную точку принимается заданная точка остановки ротора, тогда точность положения остановки представляет собой разницу между максимальным (+) значением и максимальным (-) значением в совокупности измерений, выполненных для каждого шага полного оборота.
Точность положения остановки составляет ±3 угловых минуты (±0,05˚), но только при отсутствии нагрузки. В реальных приложениях всегда присутствует одна и та же величина фрикционной нагрузки. Угловая точность в таких случаях обеспечивается угловым смещением, вызванным характеристикой «угол-крутящий момент», основанной на нагрузке трения. Если нагрузка трения постоянна, угол смещения будет постоянным для однонаправленной работы.
В реальных приложениях всегда присутствует одна и та же величина фрикционной нагрузки. Угловая точность в таких случаях обеспечивается угловым смещением, вызванным характеристикой «угол-крутящий момент», основанной на нагрузке трения. Если нагрузка трения постоянна, угол смещения будет постоянным для однонаправленной работы.
Однако при двунаправленной работе угол смещения увеличивается вдвое за круговорот. Когда требуется высокая точность остановки, всегда устанавливайте в одном и том же направлении.
Последовательность возбуждения шагового двигателя и комплекты драйверов
Каждый 5-фазный двигатель и комплект драйверов, представленные в нашем каталоге, состоят из двигателя New Pentagon с пятивыводным проводом и драйвера со специальной последовательностью возбуждения. Эта комбинация, являющаяся собственностью Oriental Motor, предлагает следующие преимущества:
- Простые соединения для пяти проводов
- Низкая вибрация
В следующих разделах описывается последовательность проводки и возбуждения.
New Pentagon, 4-фазное возбуждение: система полного шага (0,72˚/шаг)
Это уникальная система для 5-фазного двигателя, в которой возбуждаются четыре фазы. Угол шага составляет 0,72˚ (0,36˚). Он обеспечивает отличный демпфирующий эффект и, следовательно, стабильную работу.
New Pentagon, 4-5-фазное возбуждение: полушаговая система (0,36˚/шаг)
Шаговая последовательность чередования 4-фазного и 5-фазного возбуждения производит вращение на 0,36˚ за шаг. Один оборот можно разделить на 1000 шагов.
Драйверы шаговых двигателей
Существуют две распространенные системы управления шаговыми двигателями: привод постоянного тока и привод постоянного напряжения. Схема привода с постоянным напряжением проще, но добиться характеристик крутящего момента на высоких скоростях относительно сложнее.
Привод постоянного тока, с другой стороны, в настоящее время является наиболее часто используемым методом привода, поскольку он обеспечивает отличные характеристики крутящего момента на высоких скоростях. Все водители Oriental Motor используют систему привода постоянного тока.
Все водители Oriental Motor используют систему привода постоянного тока.
Обзор системы привода постоянного тока
Шаговый двигатель вращается за счет последовательного переключения тока, протекающего через обмотки. Когда скорость увеличивается, скорость переключения также становится выше, а рост тока отстает, что приводит к потере крутящего момента. Прерывание постоянного напряжения, намного превышающего номинальное напряжение двигателя, гарантирует, что номинальный ток достигнет двигателя даже на более высоких скоростях.
Ток, протекающий по обмоткам двигателя, определяемый как напряжение через резистор обнаружения тока, сравнивается с эталонным напряжением. Управление током осуществляется путем удержания переключающего транзистора Tr2 во включенном состоянии, когда напряжение на детектирующем резисторе ниже опорного напряжения (когда оно не достигло номинального тока), или отключения Tr2, когда значение выше опорного напряжения ( когда он превышает номинальный ток), тем самым обеспечивая постоянный расход номинального тока.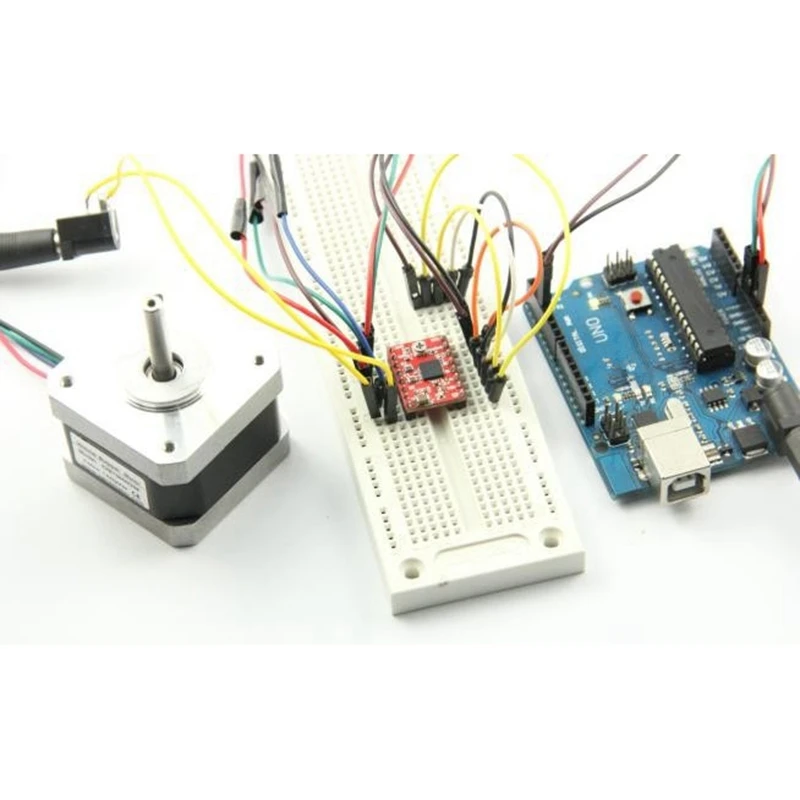
Различия между входными характеристиками переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В комплектах двигателей и драйверов Oriental Motor с входным напряжением 24 В постоянного тока к двигателю подается 24 В постоянного тока. В двигателях и драйверах на 100-115 В переменного тока вход выпрямляется до постоянного тока, а затем на двигатель подается примерно 140 В постоянного тока. (Некоторые продукты являются исключениями.)
Эта разница в напряжениях, подаваемых на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает подачу номинального тока на более высоких скоростях.
Таким образом, двигатель переменного тока и комплект драйвера имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких скоростей, обеспечивая большое передаточное число. Рекомендуется, чтобы для ваших приложений рассматривались двигатели с входом переменного тока и комплекты драйверов, совместимые с более широким диапазоном условий эксплуатации.
Рекомендуется, чтобы для ваших приложений рассматривались двигатели с входом переменного тока и комплекты драйверов, совместимые с более широким диапазоном условий эксплуатации.
Технология привода Microstep
Технология привода Microstep используется для разделения основного угла шага (0,72˚) 5-фазного шагового двигателя на более мелкие шаги (максимум до 250 делений) без использования редуктора скорости механизм.
◇ Технология микрошагового привода
Шаговый двигатель перемещается и останавливается с шагом, равным углу шага, определяемому конструкцией явно выраженных полюсов ротора и статора,
легко достигая высокой степени точности позиционирования. С другой стороны, шаговый двигатель вызывает изменение скорости вращения ротора, поскольку
двигатель вращается с шагом шага, что приводит к резонансу или большей вибрации на заданной скорости.
Микрошаговая технология обеспечивает низкий резонанс и низкий уровень шума при работе на чрезвычайно низких скоростях за счет управления потоком
электрический ток, подаваемый на катушку двигателя и тем самым разделяющий основной угол шага двигателя на более мелкие шаги.
- Основной угол шага двигателя (0,72˚/полный шаг) можно разделить на более мелкие шаги в диапазоне от 1/1 до 1/250. Таким образом, микрошаг обеспечивает плавную работу.
- Благодаря технологии плавного изменения тока привода двигателя вибрация двигателя может быть сведена к минимуму для обеспечения низкого уровня шума.
◇ До 250 микрошагов
Благодаря драйверу микрошагов можно установить различные углы шага (16 шагов до 250 делений) с помощью двух переключателей настройки угла шага. Управляя входным сигналом для переключения угла шага через внешний источник, можно переключать угол шага между уровнями, установленными для соответствующих переключателей.
Особенности привода Microstep
● Низкая вибрация
Технология привода Microstep электронно разделяет угол шага на более мелкие шаги, обеспечивая плавное пошаговое движение на низких скоростях и значительно снижая вибрацию. В то время как демпфер или аналогичное устройство обычно используется для снижения вибрации, конструкция с низким уровнем вибрации, используемая для самого двигателя, вместе с технологией микрошагового привода более эффективно минимизирует вибрацию. Антивибрационные меры могут быть значительно упрощены, поэтому он идеально подходит для большинства приложений и оборудования, чувствительных к вибрации.
В то время как демпфер или аналогичное устройство обычно используется для снижения вибрации, конструкция с низким уровнем вибрации, используемая для самого двигателя, вместе с технологией микрошагового привода более эффективно минимизирует вибрацию. Антивибрационные меры могут быть значительно упрощены, поэтому он идеально подходит для большинства приложений и оборудования, чувствительных к вибрации.
● Низкий уровень шума
Технология привода Microstep эффективно снижает уровень шума, связанного с вибрацией, на низких скоростях, обеспечивая низкий уровень шума. Двигатель демонстрирует выдающуюся производительность даже в самых чувствительных к шуму условиях.
● Улучшенная управляемость
Новый микрошаговый драйвер Pentagon с превосходными характеристиками демпфирования сводит к минимуму перерегулирование и недорегулирование в ответ на ступенчатые изменения, точно следуя последовательности импульсов и обеспечивая улучшенную линейность. Кроме того, можно уменьшить ударную нагрузку, обычно возникающую при трогании с места и остановке.
Кроме того, можно уменьшить ударную нагрузку, обычно возникающую при трогании с места и остановке.
Шаговый двигатель и драйвер
Обзор системы управления
◇ Датчик для определения положения ротора
Датчик определения положения ротора встроен в противоположный конец выходного вала двигателя
:
3:
3:
Обмотка датчика обнаруживает изменения магнитного сопротивления из-за углового положения ротора.
Инновационная система управления с обратной связью
Счетчик отклонений вычисляет отклонение (запаздывание/опережение) фактического углового положения ротора относительно команды положения с помощью импульсного сигнала. Результат расчета используется для обнаружения «области ошибочного шага» и управления двигателем путем переключения между режимами разомкнутого и замкнутого контура.
- Если отклонение позиционирования меньше }1,8˚, двигатель работает в режиме разомкнутого контура.
- Если отклонение позиционирования составляет }1,8˚ или более, двигатель работает в режиме замкнутого контура.
В режиме замкнутого контура возбуждение обмотки двигателя регулируется таким образом, чтобы при заданном угловом положении ротора развивался максимальный крутящий момент. Этот метод управления устраняет нестабильные точки (зоны неточностей) в характеристике «угол-крутящий момент».
Особенности AlphaStep
◇ Улучшенная производительность шагового двигателя
- На высоких скоростях не будет «ошибок». Поэтому, в отличие от обычных шаговых двигателей, работа будет свободна от следующих ограничений:
- Ограничения скорости разгона/торможения и коэффициента инерции, обусловленные профилем импульсов контроллера.
- Ограничение начальной скорости импульса, вызванное «ошибкой».
- Используйте фильтр скорости для настройки отклика при запуске/остановке. Реагирование на пуск/остановку можно настроить с помощью 16 настроек без изменения данных контроллера (пусковой импульс, коэффициенты ускорения/торможения). Эта функция предназначена для уменьшения ударов при работе и вибрации при работе на низкой скорости.
Возврат в исходное положение механической части Работа с использованием сигнала синхронизации возбуждения
● Сигнал синхронизации возбуждения
Сигнал синхронизации возбуждения (TIM.) выводится, когда драйвер первоначально возбуждает шаговый двигатель (шаг «0»). 5-фазный шаговый двигатель и драйверы Oriental Motor выполняют начальное возбуждение при включении питания и продвигают последовательность возбуждения
каждый раз, когда поступает импульсный сигнал, завершая один цикл, когда вал двигателя поворачивается на 7,2˚.
Используйте эти сигналы синхронизации, когда необходимо выполнить высоковоспроизводимый возврат к механическому домашнему режиму. В следующих разделах описывается возврат шагового двигателя к механическому исходному режиму и использование сигналов синхронизации.
● Возврат в исходное положение для шаговых двигателей
При включении питания для запуска автоматизированного оборудования или перезапуске оборудования после сбоя питания необходимо вернуть шаговые двигатели в исходное положение. Эта операция называется «возврат к механическому домашнему режиму».
Возврат к механическому исходному режиму шаговых двигателей использует датчики исходного положения для обнаружения механического компонента, используемого для операции позиционирования. Когда обнаруженные сигналы подтверждаются, контроллер прекращает подачу импульсного сигнала, и шаговый двигатель останавливается. Точность исходного положения при таком возврате к механическому исходному положению зависит от эффективности обнаружения датчиков исходного положения. Поскольку эффективность обнаружения датчиков исходного положения зависит от таких факторов, как температура окружающей среды и скорость приближения к зоне обнаружения механизма, необходимо уменьшить эти факторы для приложений, требующих точно воспроизводимого механического определения исходного положения.
● Улучшенная воспроизводимость с использованием сигнала синхронизации возбуждения
Метод обеспечения того, чтобы механическое исходное положение не менялось из-за различий в характеристиках обнаружения датчиков исходного положения, заключается в остановке импульсного сигнала путем логического умножения на временной сигнал. Так как синхронизирующий сигнал выводится при начальном возбуждении, если импульсный сигнал останавливается, когда выводится синхронизирующий сигнал, механическое исходное положение всегда будет определяться при начальном возбуждении.
Зависимость между длиной кабеля и частотой передачи
По мере увеличения длины кабеля импульсной линии максимальная частота передачи уменьшается. В частности, резистивная составляющая и паразитная емкость кабеля вызывают формирование цепи CR, тем самым задерживая время нарастания и спада импульса. Блуждающая емкость в кабеле возникает между электрическими проводами и плоскостями заземления. Однако трудно предоставить четкие числовые данные, поскольку условия различаются в зависимости от типа кабеля, его разводки, прокладки и других факторов.
Частота передачи при работе в сочетании с нашими изделиями (референтные значения фактических измерений) показана ниже:
Влияние жесткости муфты на оборудование
Технические характеристики муфты включают допустимую нагрузку, допустимую скорость, жесткость пружины при кручении, люфт (люфт) в муфте и допустимое смещение. На практике при выборе муфт для оборудования, требующего высокой эффективности позиционирования или низкой вибрации, основным критерием выбора будет «жесткость без люфта». Однако в некоторых случаях жесткость муфты лишь незначительно влияет на общую жесткость оборудования.
В этом разделе приводится пример сравнения общей жесткости оборудования, состоящего из шарико-винтовой передачи, в двух приложениях, где используются кулачковая муфта, такая как MCS, и сильфонная муфта, обеспечивающие более высокую жесткость. (Данные взяты из технического документа KTR, поэтому размеры муфты отличаются от изделий, предлагаемых Oriental Motor).0002 Торсиональная константа пружины сцепления челюсти
CJ = 21000 [N ・ M/RAD]
Торсионная константа пружины муфта. CM =
[N ・ M/RAD]
ВИНД ВИНТА
H = 10 [мм]
Шаровой вант Диаметр круга
D = 28,5 [мм]
9003 D = 28,5 [мм]
9003 DA = 28,5 [мм]
9003 DA = 28,5 [мм]
9003 . Д = 800 [мм]
Жесткость подшипника в осевом направлении
Rbrg = 750 [Н/мкм]
Жесткость в осевом направлении гайки ШВП
Rn = 1060 [Н/мкм9 Модуль упругости 9001 шарика]
Rf = 165000 [Н/мм2]
1. Определите жесткость на кручение шарико-винтовой передачи, подшипника и гайки. Жесткость в осевом направлении ШВП Rs рассчитывается следующим образом:
Таким образом, общая жесткость в осевом направлении ШВП, подшипника и гайки Rt рассчитывается следующим образом:
Эта жесткость в осевом направлении применяется как жесткость на кручение Ct.
2. Добейтесь общей жесткости оборудования C при использовании кулачковой муфты.
3. Получите общую жесткость оборудования C при использовании сильфонной муфты.
4. Результаты расчетов
Что такое шаговый двигатель и как он работает?
В этом уроке мы обсудим, что такое шаговый двигатель и как он работает, поэтому давайте сначала определим, что такое шаговый двигатель, и рассмотрим некоторые уникальные особенности шагового двигателя.
Задумывались ли вы когда-нибудь о том, как манипулятор движется с точностью, или как графические принтеры создают точные копии изображений, или как расходные материалы точно перемещаются по производственному цеху или любой другой тип системы управления движением?
На этом и других уроках вы узнаете об управлении движением с использованием различных типов двигателей, в первую очередь шаговых и серводвигателей.
Выбор между серводвигателем и шаговым двигателем может быть довольно сложной задачей, поскольку баланс нескольких конструктивных факторов с точки зрения стоимости, крутящего момента, скорости, ускорения и схемы привода играют важную роль в выборе наилучшего двигателя для вашего приложения.
Так как же работает шаговый двигатель? Шаговые двигатели имеют вращающийся вал с постоянными магнитами, называемый ротором, и неподвижные электромагниты, окружающие ротор, называемые статором.
Шаговые двигатели обычно имеют от 50 до 100 полюсов электромагнита (пары северных и южных полюсов), генерируемых либо постоянным магнитом, либо электрическим током.
Каждый полюс постоянного магнита обеспечивает естественную точку остановки вала двигателя.
Большое количество полюсов позволяет шаговому двигателю точно и точно позиционироваться между каждым из полюсов.
Это удобная функция шагового двигателя, поскольку полюса шагового двигателя позволяют точно позиционировать его без какой-либо обратной связи по положению.
Другими словами, он работает в разомкнутой системе управления. Управление без обратной связи позволяет одному электрическому импульсу от контроллера перемещать вал двигателя от одного полюса к другому и останавливаться на одном уровне с электромагнитным полюсом без обратной связи по положению с контроллером.
Это одно из преимуществ шагового двигателя, но дополнительные преимущества шагового двигателя будут рассмотрены в отдельной статье.
Когда мы хотим увеличить разрешение или добиться наименьшего вращательного движения, конструкция степпера будет содержать большее количество магнитных полюсов.
В основном размер шага шагового двигателя фиксируется на определенном градусе вращения в зависимости от количества полюсов электромагнита. Следовательно, перемещение к точному положению — это просто вопрос отправки правильного количества импульсных команд.
Шаговые двигатели могут иметь до 200 зубьев ротора или 200-400 полных шагов на один оборот вала двигателя.
Чтобы определить разрешение вращения, мы можем выполнить небольшую математику. Если шаговый двигатель имеет 200 инкрементных шагов, и мы знаем, что полный оборот равен кругу или 360 градусам, то мы можем разделить 360 градусов на 200. Это соответствует 1,8 градусам поворота на полный шаг.
400 шагов, разделенных на 360 градусов, обеспечивают угол поворота на 0,9 градуса полного шага.
Выдача одного цифрового импульса драйвером контроллера эквивалентна одному шагу вращения.
Теперь давайте рассмотрим простую схему движения шагового двигателя, чтобы определить, как шаговый двигатель работает за один полный оборот.
В положении 1 ротор запускается на верхнем полюсе электромагнита, на который в данный момент подается ток, протекающий по проводу.
Теперь для перемещения шагового ротора по часовой стрелке (CW) верхний полюс электромагнита деактивируется, а правый полюс электромагнита активируется, заставляя ротор поворачиваться на 90 градусов по часовой стрелке и выравниваться с активным магнитом, как показано в позиции 2.
Сейчас по мере того, как мы продолжаем деактивировать и активировать полюса электромагнита вокруг статора в положениях 3 и 4, заставляя ротор повторно выравниваться с каждым новым полюсом электромагнита, мы позволяем ротору вращаться 90 градусов по часовой стрелке каждый раз, это в конечном итоге завершает полное вращение на 360 градусов.
Подсказка: Вспомните, как одинаковые магнитные полюса отталкиваются, а противоположные притягиваются. В зависимости от того, применяется ли к проводу катушки электромагнитного полюса, мы можем вызвать ПОХОЖЕЕ и НЕПОДВИЖНОЕ магнитное притяжение и обратное притяжение, заставляющее ротор с постоянными магнитами двигаться.
В реальных шаговых двигателях используется большее количество полюсов электромагнита на статоре и роторе для увеличения разрешения, как мы обсуждали ранее.
При таком увеличении числа полюсов электромагнита работа в основном такая же, как и в примере, представленном с поворотом на 90 градусов, но теперь поворот будет больше похож на поворот на 1,8 градуса, как упоминалось ранее.
Здесь показан пример многополюсного шагового двигателя.
В положении 1 ротор выровнен в верхнем положении с активированным электромагнитом верхнего статора, что указывает S для южной поляризации, а в положении 2 верхний статор электромагнита обесточен, а статор электромагнита справа находится под напряжением, ротор движется по часовой стрелке и выравнивается с этим электромагнитом, указывающим новую поляризацию S, позволяющую точно вращать градусы.
Это изменение электромагнитной поляризации продолжает создавать вращение на 360 градусов. Чем быстрее происходит электромагнитная поляризация, тем выше скорость.
На этом статья «Что такое шаговый двигатель и как работает шаговый двигатель» завершена? Надеюсь, вы узнали, что требуется для продвижения вперед в создании собственного проекта управления движением.
Если вам понравилась эта статья, поделитесь ею с друзьями и коллегами. Эта статья является одной из серии статей об управлении двигателем и движением, поэтому, пожалуйста, заходите к нам в ближайшее время, чтобы узнать больше о том, как управлять движением.
с бесконечной любовью и благодарностью,
The Realpars Team
Поиск для:
Инженер по автоматизации
Опубликовано 9 июля 2018 г.
от Wally Gastreich
Инструктор автоматизации
. Основы двигателя — openlabpro.com
Перейти к содержимому
Шаговые двигатели — это тип двигателей постоянного тока, используемых для точных управляемых операций. В этом уроке мы рассмотрим основы шагового двигателя.
Что такое шаговый двигатель
Как следует из названия, шаговый двигатель или просто шаговый двигатель, представляющий собой бесщеточный синхронный двигатель постоянного тока, совершает дискретные шаги для завершения своего вращения. В общем случае каждый шаг в шаговом двигателе перемещается на 1,8 градуса, и, следовательно, ротору требуется 200 шагов, чтобы завершить один оборот. Шаговые двигатели также доступны с углами шага 30, 15, 5, 2,5 и 2. Шаговый двигатель работает на основе принципа электромагнетизма и может управляться с обратной связью или без нее. Поскольку можно точно контролировать положение и скорость двигателя с помощью сложных систем с компьютерным управлением, шаговые двигатели предпочтительны во многих приложениях точного управления движением, таких как робототехника.
Биполярный шаговый двигатель
Основы работы с шаговым двигателем. Как работает шаговый двигатель?
Как и в случае любых других двигателей, шаговый двигатель имеет вращающуюся часть, которую удачно называют ротором, и неподвижную часть, называемую статором. Статор и ротор имеют магнитные полюса, и за счет возбуждения полюсов статора ротор перемещается, чтобы выровняться со статором. Ротор представляет собой центральный кусок железа в форме шестерни. Статор представляет собой набор зубчатых электромагнитов, расположенных вокруг центральной шестерни.
При подаче тока на фазные обмотки шагового двигателя в статоре возникает соответствующий магнитный поток в направлении, перпендикулярном направлению протекания тока. Электромагниты возбуждаются по одному. Когда на один электромагнит подается питание с помощью внешней схемы привода или микроконтроллера, вал ротора поворачивается таким образом, что он выравнивается со статором в положении, которое минимизирует сопротивление потока. Это означает, что электромагнит притягивает зубья шестерни, благодаря которым электромагнит смещен от остальных электромагнитов. Из-за этого при включении следующего электромагнита первый электромагнит выключается, в результате чего зубья шестерни притягиваются ко второму электромагниту. Таким образом, ротор вращается ступенчато, что представляет собой целое число, определяемое углом движения на каждой ступени.
Режимы возбуждения или включения шагового двигателя
Управляя углом каждого шага, мы можем контролировать разрешение и плавность вращения ротора. Различают три режима возбуждения.
Полношаговый режим
В этом режиме ротор проходит основной угол 1,8 градуса за один шаг и, таким образом, совершает 200 шагов, чтобы завершить оборот. Мы можем добиться этого, подав питание либо только на одну фазу обмоток статора, либо на две фазы. Однофазный при работе требует минимального количества энергии от схемы драйвера. В двухфазном режиме работы две фазы активируются одновременно, что приводит к увеличению крутящего момента и скорости.
Полушаговый режим
Ротор перемещается на половину базового угла за один шаг, что приводит к более высокому крутящему моменту, чем однофазный полный шаг. Также удваивается плавность вращения и разрешение.
Микрошаг
В режиме микрошага базовый угол делится на минутные значения до 256 раз. Микрошаговый режим предпочтителен там, где требуется повышенная плавность вращения.
Типы шаговых двигателей
Шаговый двигатель с постоянными магнитами
Типичный угол шага шагового двигателя с постоянными магнитами составляет от 7,5 до 15 градусов. Ротор намагничивается за счет чередования северного полюса и южного полюса, расположенных на прямой линии, параллельной железному валу ротора. Результатом является повышенная интенсивность магнитного потока, и, следовательно, в шаговых двигателях этого типа значительно увеличивается крутящий момент. Шаговые двигатели с постоянными магнитами имеют низкое разрешение из-за более высоких значений угла шага. Это также недорогие двигатели.
Шаговый двигатель с переменным сопротивлением
Это самые ранние шаговые двигатели, которые в настоящее время широко не используются. В двигателях этого типа ротор состоит из многозубчатого ротора, изготовленного из мягкого железа, и когда катушки статора, окружающие ротор, питаются от источника постоянного тока, зубья ротора притягиваются к полюсам намагниченного статора, и, таким образом, вращение принимает место.
Гибридный шаговый двигатель
Поскольку нормальные углы шага гибридного шагового двигателя составляют от 3,6 до 0,9 градусаградусов, характеристики двигателя, крутящий момент и скорость двигателя этого типа выше по сравнению с шаговым двигателем с постоянными магнитами. Поскольку такие шаговые двигатели обладают характеристиками как двигателей с постоянными магнитами, они называются гибридными шаговыми двигателями. Ротор многозубый, как и в случае двигателя с переменным сопротивлением. Электромагнит намагничен в осевом направлении и концентричен вокруг вала.
Униполярный шаговый двигатель и биполярный шаговый двигатель
Другая классификация основана на типе расположения основной обмотки двухфазного шагового двигателя. их униполярный шаговый двигатель и биполярный шаговый двигатель. Основное различие между униполярным и биполярным шаговыми двигателями заключается в том, что первый работает с одной полярностью, а второй работает как с положительным, так и с отрицательным напряжением. Еще одно различие между униполярным и биполярным двигателем заключается в том, что в униполярных шаговых двигателях в каждой из катушек униполярного двигателя требуется провод для передачи тока на тот или иной конец катушки. Эта разница в направлении создает две полярности тока вместо положительной и отрицательной полярности.
Биполярный шаговый двигатель
Из-за наличия дополнительного провода в середине катушек, униполярный шаговый двигатель будет создавать вдвое меньший магнитный поток из-за уменьшенного тока. Поэтому биполярный шаговый двигатель создает больший крутящий момент, чем униполярный шаговый двигатель.
Униполярный шаговый двигатель
Применение шаговых двигателей
Как упоминалось ранее, шаговые двигатели нашли свое применение в системах позиционирования с управлением движением, поскольку с помощью шаговых двигателей, управляемых компьютером, легко обеспечить точное управление положением. Они широко используются в биомедицинском оборудовании, где требуется точный и точный контроль положения. Они также присутствуют в драйверах дисков, компьютерных принтерах и сканерах, интеллектуальном освещении, объективах камер и различных других распространенных устройствах и оборудовании.
В робототехнике предпочтение отдается шаговым двигателям из-за их точностных характеристик. 3D-камеры, XY-плоттеры, ЧПУ и некоторые другие платформы камер также используют шаговые двигатели из-за их высокой надежности и точности.
Преимущества и недостатки шагового двигателя
Преимущества
Благодаря точному приращению движения ротора очень легко точно контролировать скорость вращения. Это делает шаговый двигатель вполне приемлемым для применения в робототехнике и автоматизации. Другими преимуществами являются простота конструкции и низкая стоимость обслуживания. Шаговый двигатель легко адаптируется к любым изменениям окружающей среды, и это очень надежная машина. Другой важной и решающей особенностью является то, что он очень чувствителен к началу, остановке и изменению активности. Это тоже приветственная характеристика. Поскольку крутящий момент на низкой скорости у шаговых двигателей сравнительно выше, они предпочтительнее в приложениях, где требуется высокий крутящий момент на низкой скорости. Отсутствие щеток является преимуществом, так как увеличивает общий срок службы двигателя. Если фазные обмотки находятся под напряжением, ротор будет создавать максимальный крутящий момент в состоянии покоя.
Недостатки
Одним из основных недостатков этого типа двигателей постоянного тока является то, что им требуется больше тока, чем обычному двигателю постоянного тока. Хотя крутящий момент относительно выше на более низких скоростях, он очень низок на более высоких скоростях, и работать на более высоких скоростях не очень легко. Это еще один принципиальный недостаток. Такие двигатели относительно неэффективны. Отсутствие механизма обратной связи является еще одним недостатком, так как система обратной связи необходима для обеспечения безопасности.
Spread the love, share this
-
Как работают шаговые двигатели — The Geek Pub
Шаговые двигатели используются во многих вещах, которые вы покупаете сегодня, и большинство людей даже не подозревают об этом! Это действительно удивительные маленькие кусочки электроники и механики, объединенные в одно целое. Даже вибратор, встроенный в ваш телефон, вероятно, основан на технологии шагового двигателя! В этом уроке мы рассмотрим основы работы шаговых двигателей. Мы думаем, вам будет очень интересно.
Как работают шаговые двигатели
Давайте начнем с самых основ того, как на самом деле работает шаговый двигатель. Фундаментальные основы, стоящие за ними, связаны с магнитами! Кто не любит магниты?
Глядя на картинку справа, вы увидите наш шаговый двигатель в разрезе. В центре находится круглый стержень, соединенный с постоянным магнитом, обозначенным здесь как N/S (северный и южный полюса). Мы называем это ротором. Это часть, которая вращается, когда работает шаговый двигатель.
Ротор окружен набором обмоток, содержащих катушки. Эти катушки статора намагничиваются или размагничиваются, когда мы добавляем или удаляем из них ток. Статор здесь представлен как A+, B+, A- и B-.
Магнитные поля, создаваемые вокруг статора, взаимодействуют с северным и южным полюсами постоянного магнита ротора. Как вы можете видеть на диаграмме ниже, эти взаимодействия заставляют ротор поворачиваться и выравниваться с той частью статора, к которой он притягивается. В двух словах, так работают шаговые двигатели. Но давайте нырнем глубже!
Типы конструкций шаговых двигателей
В настоящее время используются три основных типа конструкций шаговых двигателей, хотя есть и очень сложные варианты этих трех. Мы называем эти три типа: с постоянным магнитом , с переменным магнитным сопротивлением и с гибридным синхронным .
Шаговые двигатели с постоянными магнитами
Шаговые двигатели с постоянными магнитами работают почти так же, как и звучат. У них в центре ротор с постоянными магнитами, который приводится в движение электромагнитами обмоток статора. Статор обеспечивает полярность, противоположную одному из полюсов ротора, и поэтому притягивает этот полюс, и он вращается к нему. Шаговые двигатели с постоянными магнитами хорошо работают в низкоскоростных устройствах, где требуется относительно высокий крутящий момент.
Шаговые двигатели с переменным сопротивлением
Шаговые двигатели с переменным сопротивлением работают не так, как другие типы, и в них используется ненамагниченный ротор. Этот тип шагового двигателя является самой простой конструкцией. Ротор обычно сделан из железа и имеет зубья, смещенные относительно статора. Когда обмотки намагничены, ротор выровняется там, где между ним и статором есть минимальный зазор. Шаговые двигатели с переменным сопротивлением часто используются для высокоскоростных приложений, где точность не так важна. Эта конструкция также считается самым шумным типом шагового двигателя.
Гибридные синхронные шаговые двигатели
Гибридные синхронные шаговые двигатели работают именно так, как вы и предполагали. Они представляют собой гибридную конструкцию, которая включает в себя концепции как конструкции с постоянными магнитами, так и конструкции с переменным магнитным сопротивлением! В этой конструкции шаговый двигатель имеет две чашки на роторе. Каждая чашка покрыта множеством «зубцов» постоянного магнита. Сам статор тоже зубчатый. Это дает гибридным конструкциям лучшее из обоих миров производительности. Он имеет высокий крутящий момент, может работать на более высоких скоростях и очень точен. Кроме того, зубчатая конструкция обеспечивает высокое разрешение гибридного синхронного шагового двигателя с моделями, имеющими 500 и более шагов на оборот!
Теперь давайте узнаем, как на самом деле работают двигатели.
Типы режимов управления шаговыми двигателями
Продолжая изучать работу шаговых двигателей, давайте рассмотрим четыре различных режима управления: волновой привод , полный шаг , полушаг и микрошаг . Поскольку весь принцип шаговых двигателей основан на включении и выключении электромагнитов, схема должна знать, как подавать импульсы или удерживать эти магниты, чтобы статор заставлял ротор двигаться в правильном направлении и вправо. должность.
Волновой привод/режим возбуждения с одной катушкой
Первый тип режима возбуждения называется волновым приводом (иногда инженеры любят говорить «возбуждение с одной катушкой»). В этом режиме привода одновременно активна только одна катушка на статоре. В нашем примере ниже есть четыре катушки. С волновым приводом это приводит к четырем общим положениям.
Полношаговый привод
Полношаговый привод аналогичен волновому приводу, за исключением того, что в любой момент намагничиваются две катушки. Этот тип привода распространен, когда требуется больший крутящий момент для того же количества положений. Это тот же основной принцип работы волнового привода, но с примерно удвоенным крутящим моментом и вдвое большей потребляемой мощностью.
Полушаговый режим
Полушаговый режим захватывает волну и полный шаг и объединяет их вместе! Шаг 1 активирует одну катушку, шаг 2 представляет собой половину шага и активирует две катушки. Шаг 3 активирует только третью катушку. Мы теряем увеличенный крутящий момент полного шага на половине позиций, но удваиваем количество позиций! В данном случае у нас четыре катушки на статоре, но всего 8 позиций.
Режим микрошагового привода
Микрошаг — это наиболее сложная форма привода шагового двигателя, которую использует большинство современных устройств (конечно же!). Микрошаговый двигатель использует широтно-импульсную модуляцию (ШИМ) для обеспечения переменного тока. При микрошаговом шаговом двигателе с четырьмя катушками может быть 20 положений! У нас есть учебник, если вы хотите узнать больше о PWM.
Сообщите нам в комментариях, если у вас есть какие-либо вопросы или как мы можем улучшить этот урок!
Как шаговые двигатели обеспечивают точное управление
Шаговые двигатели используются в различных приложениях для обеспечения точного управления движением. Но что такое шаговый двигатель и как он работает? В этой статье подробно обсуждаются биполярные двигатели, объясняется, что они из себя представляют и как они работают, а также приводятся примеры их использования с различными типами пропорциональных клапанов для обеспечения точного управления.
Шаговые двигатели представляют собой бесщеточные двигатели постоянного тока, которые вращаются пошагово, электронно задаваемым контроллером или приводом, который обеспечивает необходимый ток через электромагниты, расположенные по кольцу как часть узла статора (неподвижная часть двигателя). Шаговые двигатели идеально подходят для приложений, требующих управления скоростью и положением, особенно на низких скоростях, таких как автоматизация, системы движения и 3D-принтеры. Благодаря своей внутренней конструкции, которая сводит к минимуму механические и электрические «задержки», возникающие в других двигателях, шаговые двигатели обладают замечательной точностью останова и чувствительностью. Часто это делает шаговые двигатели идеальным выбором для синхронных и высокоточных операций.
Рис. 1. Схема шагового двигателя
Сердцевиной шагового двигателя является постоянный магнит и вал, расположенный по центру двух или более зубчатых роторов. Эти роторы имеют разную полярность из-за закрытого магнита и смещены друг относительно друга, чтобы лучше притягиваться к электромагнитным зубьям, покрывающим внутреннюю поверхность статора. У статора меньше зубьев, чем у каждого ротора, чтобы обеспечить полное выравнивание только в секциях (пластинах статора) вдоль пар катушек. Включение и выключение витых пар катушек заставляет вал вращаться на полный шаг за счет притяжения и отталкивания намагниченных зубьев.
Как рассчитать шаги шагового двигателя
Рис. 2. Расчет угла шага
Угол шага — это угол поворота, совершаемый за один шаг. Это можно рассчитать одним из двух способов: либо путем деления полных 360 градусов двигателя на количество шагов, которые двигатель делает для совершения одного оборота, либо путем деления полных 360 градусов двигателя на удвоенное число зубьев ротора, умноженное на число зубьев ротора. фазы статора (рис. 2).
Микрошаг
Одновременное управление токами через несколько пар катушек уменьшает общий ход/вращение за счет притяжения зубьев в двух направлениях вместо одного, создавая новые переходы набора половин, четвертей, восьмых или одной шестнадцатой ступени, известные как микрошаги. Микрошаг обеспечивает лучшее разрешение и снижает резонанс/вибрации, но также снижает крутящий момент и может отрицательно сказаться на точности.
Приводы и управление шаговыми двигателями
Подача питания на катушки шагового двигателя в правильной последовательности для выполнения одного шага — сложная задача. Таким образом, фактическое управление обмотками двигателя обычно осуществляется с помощью драйвера. Существует два типа приводов шаговых двигателей — с постоянным напряжением (привод L/R) и постоянным током (привод с прерывателем). Приводы L/R в основном ограничены низкоскоростными приложениями, поэтому мы сосредоточимся на приводах с прерывателями. Если вам интересно узнать больше, в этой статье представлен хороший обзор различий между приводом L/R и приводом прерывателя.
Рис. 3. Взаимосвязь между нарастанием тока и индуктивностью
Драйверы упрощают работу шагового двигателя, интерпретируя цифровой сигнал шага и направления от контроллера и соответственно активируя обмотки двигателя. Вся электроника управляется законом Ома и зависимостью между нарастанием тока и индуктивностью (рис. 3). В шаговых двигателях конструкция двигателя (в отношении его катушек) предотвращает быстрое увеличение тока во время импульсов (командных сигналов), что означает, что ток никогда не может достичь своего пикового значения без очень высокого напряжения. Это проблема, потому что без достаточного тока крутящий момент будет низким, особенно на высоких скоростях двигателя. Чтобы бороться с этим, приводы прерывателей выполняют так называемую широтно-импульсную модуляцию (ШИМ).
Рис. 4. Напряжение и ток привода прерывателя
Широтно-импульсная модуляция (ШИМ)
Широтно-импульсная модуляция (ШИМ) включает очень быстрое включение и выключение выходного напряжения двигателя на каждом шаге. Это обеспечивает очень высокое напряжение на обмотках двигателя (обычно в 8 раз больше, чем номинальное напряжение двигателя), что вызывает быстрый рост тока и становится выше, чем в противном случае. Это действие включения и выключения обычно происходит на частоте 20 кГц или выше, но на «время включения» напряжения влияет импеданс катушки и скорость двигателя — таким образом, на более высоких скоростях напряжение длится дольше (большая ширина импульса). для получения среднего тока на правильном уровне (рис. 3).
Преобразователи шагового двигателя
Преобразователи шагового двигателя регулируются токочувствительным резистором, включенным последовательно с каждой катушкой. Резистор создает напряжение на себе, которое затем контролируется компаратором. Когда это напряжение достигает заданного опорного напряжения, оно «обрезается» (выключается) до тех пор, пока не появится следующий импульс. Это позволяет среднему току быть стабильным, несмотря на любые изменения напряжения питания, и повышает эффективность, обеспечивая максимально короткие интервалы между пиками и впадинами тока.
Линейные приводы шагового двигателя
Шаговый двигатель может иметь вал с резьбой, прикрепленный к его вращающемуся сердечнику, который затем можно использовать для толкания или вытягивания надетой на него гайки, перемещая ее в осевом направлении. Шаг резьбы определяет, насколько далеко может двигаться гайка за шаг, при этом разрешение/точность частично определяется углом шага, используемым шаговым двигателем (полный, половинный, четверть и т. д.). Как и большинство линейных систем, линейный привод с шаговым приводом может быть подвержен люфту. Люфт возникает из-за «люфта» или «люфта» между резьбой гайки и резьбой ходового винта. Наличие зазора между резьбами приводит к мертвой зоне при изменении направления движения. При изменении направления линейный привод не будет перемещаться до тех пор, пока не будет удален зазор между резьбами (резьба снова соприкоснется). По этой причине рекомендуется, чтобы резьба имела максимально возможный допуск. Конструкторы должны работать, чтобы сбалансировать люфт и трение, возникающее при ужесточении допусков.
Пропорциональные клапаны Clippard с шаговым управлением
Clippard предлагает два различных пропорциональных клапана управления потоком с шаговым управлением: пропорциональный игольчатый клапан серии SCPV и новый пропорциональный запорный клапан серии Eclipse. Серия SCPV компании Clippard использует шаговый двигатель для управления расстоянием между иглой и седлом клапана. Точный пропорциональный поток достигается за счет регулировки положения иглы. Из-за типа линейного привода с шаговым двигателем, используемого в SCPV, не рекомендуется применять микрошаги за пределами полушага. Рекомендуется полный шаг, который соответствует линейному перемещению 0,001 дюйма, что дает разрешение потока воздуха 0,7 л/мин.
В новой серии Clippard Eclipse шаговый двигатель оснащен линейным приводом с мелким шагом, который перемещается всего на 0,00006 дюйма за шаг для перемещения специальной керамической пластины с прорезями. Керамика используется для соединения двух портов через вторую керамическую пластину под ней. Пропорциональный поток достигается за счет регулировки степени перекрытия («затмения») между слотом и портами. Eclipse спроектирован так, чтобы переходить от закрытого к открытому примерно через одну шестнадцатую дюйма, что соответствует 1125 шагам разрешения. Это число может быть значительно увеличено за счет внедрения микрошагов — переключение на шаг в одну шестнадцатую приведет к разрешению в 18 000. Один шаг в одну шестнадцатую с этим уникальным пропорциональным запорным клапаном регулирует поток примерно на 13 микролитров (мкл/мин) воды.
Хотя шаговые двигатели могут показаться сложными по сравнению со стандартным двигателем постоянного тока, как мы показали, их основные операции на самом деле довольно просты. Их уникальная внутренняя конструкция обеспечивает исключительную точность останова и быстродействие, что делает шаговые двигатели идеальным выбором для использования в самых разных приложениях, требующих точного управления.
Если у вас есть вопросы о шаговых двигателях или вы хотите узнать больше об использовании пропорционального регулирующего клапана с шаговым управлением в вашем приложении, найдите ближайшего дистрибьютора Clippard или свяжитесь с Clippard сегодня.
Джесс Кенигер • Инженер-конструктор • Clippard
Как использовать шаговый двигатель – блог Digilent
Добро пожаловать в блог Digilent!
В окружающем нас мире везде есть моторы: в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и так далее. К сожалению, есть много людей (в том числе и я до недавнего времени), которые не знали бы, что делать, если бы им вручили двигатель и сказали запустить его. Поэтому я решил, что хочу это изменить. Давайте научимся управлять шаговым двигателем!
4-фазный шаговый двигатель, вращающий шестерню. Изображение с этой страницы Википедии.
Шаговые двигатели — это один из трех основных классов двигателей: два других — это двигатели постоянного тока и серводвигатели. Как бесщеточный двигатель, центральный вал шагового двигателя физически не касается чего-либо, чтобы вращаться. Вместо этого в шаговых двигателях используются электромагниты, концентрически расположенные вокруг центрального вала, чтобы заставить его вращаться. Для тех из вас, кто может не знать, электромагниты работают, когда ток течет по проводу, намотанному на «мягкий» магнит. Эта комбинация создает магнитное поле, заставляющее центральный вал вращаться так, что «зубья» вала совмещаются с зубцами любого электромагнита, на который подается напряжение. Многие шаговые двигатели имеют только два таких электромагнита, расположенных на 90 градусов друг от друга.
Шаговый двигатель с переменным сопротивлением. Изображение Anaheim Automation. Шаговый двигатель с постоянными магнитами. Изображение от Anaheim Automation.
Доступны три основных подтипа шаговых двигателей: переменное сопротивление, двигатели с постоянными магнитами и гибридные шаговые двигатели. Двигатель с переменной индуктивностью использует генерируемое магнитное поле исключительно для вращения центрального вала. Неудивительно, что шаговый двигатель с постоянными магнитами имеет постоянный магнит на центральном валу, который будет соответствующим образом вращаться, чтобы его северный и южный полюсы совпадали с электромагнитом, который в данный момент находится под напряжением. Кроме того, шаговый двигатель с постоянными магнитами не имеет «зубцов» на центральном валу, в то время как двигатель с переменной индуктивностью имеет несколько зубцов, которые выстраиваются в линию с возбужденными электромагнитами, образуя «путь наименьшего сопротивления».
Гибридный шаговый двигатель (адаптировано из изображения All About Circuits).
Гибридный двигатель представляет собой комбинацию этих двух двигателей. Центральный вал имеет два набора зубцов, соответствующих двум магнитным полярностям, которые затем будут вращаться и должным образом совмещаться с зубьями возбужденного электромагнита. Поскольку гибридный шаговый двигатель имеет двойной ряд зубьев, эти двигатели имеют наименьший размер шага и являются наиболее популярным типом двигателей.
Но как на самом деле управлять шаговым двигателем? Существует два режима работы шагового двигателя: униполярный и биполярный. Униполярный режим работает только в положительном диапазоне напряжения. Обычно это означало бы, что ток может проходить только в одном направлении через электромагнитные катушки, создавая магнитное поле только в одном направлении, а это означает, что центральный вал может наклоняться только вперед и назад между двумя электромагнитами.
Когда ток может течь только в одном направлении через катушку, вал не может повернуться на все 360 градусов.
Эта потенциальная проблема решается тем фактом, что униполярные шаговые двигатели имеют дополнительный провод, прикрепленный к середине двух катушек. Это позволяет току течь в двух разных направлениях: от середины к одной стороне катушки или к другой стороне катушки. Эти два направления создают магнитные поля в «противоположных» направлениях, позволяя зубьям намагниченного центрального вала вращаться на полные 360 градусов.
В биполярных шаговых двигателях ток через катушки течет в двух разных направлениях. Вместо использования центрального отвода они используют как положительное, так и отрицательное (двухполярное) напряжение, чтобы вызвать протекание тока в обоих направлениях через катушку. Поскольку ток может протекать через всю катушку, а не только через половину катушки в униполярном режиме, биполярные шаговые двигатели имеют больший крутящий момент для вращения и удержания центрального вала на месте.
Доступные конфигурации проводов шагового двигателя. Изображение от Osmtec.
Как узнать, является ли ваш шаговый двигатель униполярным или биполярным, просто взглянув на него? В большинстве случаев двигатель, на который вы смотрите, является и тем, и другим. Униполярный и биполярный — это просто режимы, которые вы можете использовать для запуска шагового двигателя. Единственный случай, когда шаговый двигатель не может работать ни в одном из режимов, — это когда из шагового двигателя выходят только четыре провода, соответствующие обоим концам двух катушек, и нет центрального ответвления. Если у вас есть более четырех проводов (будь то пять, шесть или даже восемь проводов), по крайней мере, один из этих проводов является проводом центрального отвода. Вы можете выяснить, какой провод какой, либо просмотрев техническое описание вашего двигателя, либо измерив сопротивление между двумя проводами одновременно с помощью мультиметра. Если один конкретный провод всегда измеряет половину сопротивления, которое сообщают другие пары проводов, то вы знаете, что провод должен быть ответвлен в середине (следовательно, половина сопротивления) катушки.
Диаграммы сигналов трех основных стилей вождения. Создано Misan2010 на Викискладе.
Несмотря на всю эту информацию, мы на самом деле так и не узнали, как мы можем управлять нашими двигателями. Есть три основных способа (да, шаговые двигатели имеют множество вариаций), которыми можно управлять шаговым двигателем. Эти три стиля вождения — полный шаг, полушаговый привод и микрошаг. Полношаговый привод всегда имеет два электромагнита (или, по крайней мере, два разных тока), находящихся под напряжением одновременно. Для вращения центрального вала один из потоков тока перекрывается, «выключая» электромагнит, и запускается другой поток тока, «включая» другой электромагнит. Этот стиль вождения имеет наибольший крутящий момент, потому что два электромагнита всегда находятся под напряжением, но также имеет самый большой размер шага.
Полушаговый привод похож на полношаговый, но переключается между включением одного или двух электромагнитов. Сначала один электромагнит будет под напряжением, а затем «включится» второй. Затем первый электромагнит будет «выключен», а второй электромагнит останется под напряжением. Затем будет запущен новый поток тока для питания «третьего» электромагнита в дополнение к «включенному» второму электромагниту. Этот стиль вождения приводит к половине размера шага полношагового привода, что обеспечивает большую точность, но также приводит к меньшему крутящему моменту, поскольку не всегда два электромагнита находятся под напряжением.
Микрошаг, как вы, вероятно, подозреваете, имеет наименьший размер шага из всех этих стилей вождения. Принцип его работы заключается в приложении переменного напряжения к каждой из катушек синусоидальным образом. Чем меньше приращение напряжения (и, следовательно, тока), которое вы можете произвести, тем меньше размер шага. Однако это также приводит к различному крутящему моменту, который демонстрирует шаговый двигатель, в зависимости от того, где вы находитесь в последовательности шагов.
Но у нас остался важный вопрос. Если мы используем шаговый двигатель из стартового комплекта chipKIT, который рассчитан на 5 В, как мы можем использовать его с платой Digilent, такой как chipKIT uC32, которая работает только при 3,3 В?
Схема пары транзисторов Дарлингтона от TI ULN2803A.
Если мы хотим запустить шаговый двигатель в униполярном режиме, то нам нужно увеличить напряжение на выходе чипкита uC32 с 3,3В до 5В. Мы могли бы сделать это, используя несколько операционных усилителей, но лично я предпочел бы не возиться со всеми резисторами, которые мне понадобятся. Массив транзисторов Дарлингтона, такой как ULN2803 от TI, был бы менее беспорядочным. В двух словах, пара транзисторов Дарлингтона состоит из двух NPN-транзисторов, расположенных таким образом, что, когда микроконтроллер посылает высокое логическое напряжение, на выходе пары транзисторов будет низкое напряжение (0 В), потребляя ток от Линия с отводом по центру 5В. Однако, если приложено низкое логическое напряжение, выход вместо этого будет находиться в состоянии с высоким импедансом, потому что NPN-транзистор будет действовать как «разомкнутая цепь». Это эффективно предотвращает протекание любого тока через ИС, поэтому ток не будет течь через катушки шагового двигателя. Без тока в катушках не создается магнитное поле, поэтому центральный вал не будет двигаться. Вы можете узнать больше о том, как работают транзисторы Дарлингтона здесь.
Для биполярного режима нам нужен либо способ создания отрицательного напряжения, либо какой-то способ, чтобы ток протекал в другом направлении через всю катушку, поскольку биполярный режим требует, чтобы мы не использовали провод с ответвлениями в центре. Нет простого способа получить отрицательное напряжение без внешнего источника питания, но мы можем легко заставить ток течь в другом направлении, используя H-мост, такой как L293D от TI. H-мосты работают за счет использования MOSFET-транзисторов, которые могут действовать как переключатель. Затем эти транзисторы устроены таким образом, что, когда определенные переключатели «включены», ток будет течь через электромагнит в одном направлении, а когда другой набор переключателей включен (а другие переключатели остаются разомкнутыми), ток будет течь через электромагнит.