Содержание
Сервопривод или шаговый двигатель?
Главная
/
Справочник
/
Сервопривод или шаговый двигатель?
В случаях, когда необходима высокая точность работы исполнительных механизмов, используют асинхронный электродвигатель с энкодером обратной связи. Однако в промышленных станках с особыми требованиями к точности позиционирования подобное оборудование не справится с задачами в силу ряда конструктивных недостатков — низкого момента на малых скоростях, проскальзывания ротора, инерции при разгоне и торможении. В таких случаях используются сервоприводы и шаговые двигатели. Рассмотрим преимущества и недостатки обоих типов приводов.
Рассмотрим преимущества и недостатки обоих типов приводов.
Сервоприводы
В состав сервопривода входят серводвигатель и электронный блок управления (сервоусилитель или сервопреобразователь). В качестве серводвигателей наиболее широко применяют синхронные трехфазные электродвигатели, в которых установлены мощные постоянные магниты для улучшения динамических характеристик. Обязательным компонентом сервопривода также является энкодер. Как правило, он превосходит по своим параметрам обычные энкодеры, поставляемые отдельно. Его разрешение может достигать сотен тысяч импульсов на оборот, за счет чего достигается сверхточное позиционирование. Для примера, разрешение встроенных энкодеров сервоприводов Delta ASD-A2 составляет 1 280 000 имп/об.
Сервоусилитель получает два сигнала управления — сигнал задания скорости (или угла поворота) и сигнал обратной связи с энкодера. В результате сервопривод обеспечивает движение какой-либо механической нагрузки с большой точностью не только по скорости вращения, но и по углу поворота, который может быть выдержан до долей градуса.
Шаговые двигатели
Шаговый двигатель — это особый вид многофазного синхронного двигателя, дискретное вращение которого производится путем подачи импульсов напряжения на нужные обмотки статора. При этом ротор не имеет обмоток и состоит из магнитного материала.
Основной параметр шагового двигателя — его шаг, или количество шагов на оборот. Для одного полного оборота ротора необходимо строго определенное количество импульсов. Чем меньше шаг, тем большую точность позиционирования может обеспечить данный шаговый двигатель.
Управляющие импульсы формируются специальным драйвером, который получает задание с контроллера. При этом обратной связи не требуется, поскольку путем подсчета импульсов всегда можно узнать, на какой угол повернулся вал шагового двигателя, и сколько оборотов он сделал.
Преимущества сервоприводов
- Мощность серводвигателей может достигать 15 кВт, в то время как мощность шагового электродвигателя, как правило, не превышает 1 кВт.

- Бесшумность работы благодаря принципу действия и сверхточному исполнению конструкции.
- Скорость вращения в сервоприводах может достигать 10000 об/мин, в некоторых случаях и больше. У шаговых двигателей номинальная скорость вращения обычно не превышает 1000 об/мин вследствие падения момента и увеличения вероятности ошибок.
- Высокая энергоэффективность. Потребляемая мощность сервопривода пропорциональна нагрузке на валу. Для шагового электродвигателя потребляемая мощность одинакова вне зависимости от нагрузки.
- Наличие обратной связи обеспечивает точной информацией о повороте вала в любой момент времени. В шаговых двигателях возможно проскальзывание при перегрузке, накопление ошибки и потеря позиционирования.
- Большая плавность хода. В шаговых двигателях добиться плавности можно только путем применения специальных методов управления.
Преимущества шаговых двигателей
- Меньшая цена при одинаковой мощности в силу более простой конструкции двигателя и драйвера.
- Возможность работы на экстремально низких оборотах без ухудшения характеристик и применения редукторов.
- Более точное позиционирование, обусловленное конструкцией двигателя.
- Отсутствие необходимости в обратной связи.
- Для фиксации вала двигателя при останове достаточно снять с него напряжение. При останове серводвигателя необходимо расходовать мощность на удержание либо использовать электромеханический тормоз.

Применение
В промышленном оборудовании для выполнения задач позиционирования имеет смысл использовать и асинхронные двигатели с обратной связью, и сервоприводы, и шаговые двигатели.
Сервоприводы устанавливаются в тех узлах оборудования, где требуется точное позиционирование механизмов для их синхронизации с другими узлами. В частности сервоприводы широко используют в обрабатывающих станках.
Шаговые двигатели нашли наибольшее применение в станках с ЧПУ и в робототехнике.
На практике встречаются производственные линии, в которых в различных узлах используются все три типа электродвигателей.
Другие полезные материалы:
Выбор оптимального типоразмера электродвигателя
Как выбрать мотор-редуктор
Редуктор от «А» до «Я»
Подпишитесь на рассылку!
Никакого спама! Только полезная справочная информация.
Я согласен на обработку персональных данных
Сервопривод или шаговый двигатель — что выбрать, отличие
Что выбрать: шаговый или серводвигатель?
Статья, которая поможет разобраться в чем отличие серводвигателя от шагового двигателя.
Очень часто встает вопрос о том, что выбрать — привод на шаговых двигателях или серводвигателях?
Основными факторами, влияющими на выбор, являются:
- Бюджет
Если Вы жестко ограничены в бюджете, возможно, выбора как такового и нет. Шаговые двигатели значительно дешевле серводвигателей. Однако, такая закономерность действует только до определенного момента. Начиная с двигателей с размером фланца 110мм, стоимость приводов на шаговых моторах и сервоприводов Darxton серии DXS уже сопоставима. - Размер станка.
Чем больше станок, тем более крупные шаговые двигатели ему требуются. Резонанс больших шаговых двигателей может привести к пропуску шагов и снижению чистоты обработки.
Рекомендация : Если рабочее поле станка превышает 1.2 м2, или масса портала превышает 50 кг, мы настоятельно рекомендуем использовать серводвигатели.
- Сложность настройки
Сервосистемы имеют десятки настраиваемых параметров, требуют больше внимания и более высокую квалификацию оператора. Если Вы ищете простое решение «включил и работай» — возможно, вам лучше использовать шаговые двигатели. - Наличие нагрузки на передачу в момент остановки
Так, на ось Z для удержания шпинделя обычно лучше подходят шаговые двигатели — для них удержание самый эффективный режим, вал фиксируется в положении удержания совершенно неподвижно, а высоких скоростей и ускорений по Z как правило не требуется. Сервопривод в таких условиях будет совершать микроколебания, что нежелательно.Аналогично, если двигатель планируется к установке на поворотную ось, где требуется медленное вращение, и после каждого углового шага следует серия движений шпинделя вдоль заготовки — шаговый двигатель лучше справится с удержанием. - Необходимость достигать высоких ускорений
Если есть такая необходимость — альтернативы серводвигателям нет. Шаговые двигатели весьма инертны, и попытка быстро разогнать его приведет к т.н. «срыву» — пропуску шагов или остановке вала. Тогда как сервоприводы способны кратковременно увеличить ток обмоток в 3-4 раза от номинального значения, чтобы развить больший момент и, соответственно, большее ускорение - Вероятность заклинивания механики
Если вероятность заклинивания механической системы велика (например, в случае приводных актуаторов систем открывания ворот), серводвигатели использовать нежелательно — шаговые двигатели просто будут пропускать шаги, в то время как сервопривод в случае неправильной настройки может повредить передачу или обмотки собственного двигателя.
- Звук
Шаговые двигатели при работе издают весьма сильный гул. Если для Вас низкий уровень шума критичен — следует использовать сервоприводы.
 Шаговые двигатели значительно дешевле серводвигателей. Однако, такая закономерность действует только до определенного момента. Начиная с двигателей с размером фланца 110мм, стоимость приводов на шаговых моторах и сервоприводов Darxton серии DXS уже сопоставима.
Шаговые двигатели значительно дешевле серводвигателей. Однако, такая закономерность действует только до определенного момента. Начиная с двигателей с размером фланца 110мм, стоимость приводов на шаговых моторах и сервоприводов Darxton серии DXS уже сопоставима.
 Сервопривод в таких условиях будет совершать микроколебания, что нежелательно.Аналогично, если двигатель планируется к установке на поворотную ось, где требуется медленное вращение, и после каждого углового шага следует серия движений шпинделя вдоль заготовки — шаговый двигатель лучше справится с удержанием.
Сервопривод в таких условиях будет совершать микроколебания, что нежелательно.Аналогично, если двигатель планируется к установке на поворотную ось, где требуется медленное вращение, и после каждого углового шага следует серия движений шпинделя вдоль заготовки — шаговый двигатель лучше справится с удержанием.
В общем же случае построения фрезерного или иного станка с ЧПУ, сервоприводы предпочтительней шаговых, за счет своих многочисленных преимуществ. Если Вы не смогли определиться что выбрать: шаговый или серводвигатель, изучите таблицу отличий.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 Максимален при неподвижном вале
Максимален при неподвижном вале
 Пропущенный шаг останется незамеченным для системы ЧПУ. Однако, при правильном проектировании станка обратная связь не требуется
Пропущенный шаг останется незамеченным для системы ЧПУ. Однако, при правильном проектировании станка обратная связь не требуется
 Если вал двигателя заклинило — он просто будет пропускать шаги
Если вал двигателя заклинило — он просто будет пропускать шаги
 Шаговые двигатели подвержены резонансу, что приводит к пропуску шагов, снижению качества обработки и пр.
Шаговые двигатели подвержены резонансу, что приводит к пропуску шагов, снижению качества обработки и пр.
 Способен резко ускориться
Способен резко ускориться
Альтернативный способ выбора между шаговым и серводвигателем
Некоторые производители при выборе предлагают отталкиваться от мощности двигателей, требуемых для станка (см. статью Выбор шагового двигателя и мощности сервопривода). Для этого предлагается рассчитать коэффициент К по эмпирической формуле К = М * S / 58000, где М — масса движимой части (портала со шпинделем), S — требуемая скорость перемещения (мм/мин). Если К < 1, вам скорее всего подойдут шаговые двигатели. Если К > 2, ваш выбор серводвигатели. Если К лежит в пределах от 1 до 2, Вам могут подойти оба вида привода и Вам стоит ввести дополнительные критерии выбора для определения лучшего варианта.
См. также:
>Свежий взгляд на шаговые двигатели и сервоприводы
>Как выбрать привод для станка с ЧПУ
Униполярный или шаговый двигатель
>Коллекторные серводвигатели
Выбор между коллекторными и бесщеточными BLDC-двигателями
DARXTON
В чем разница между серводвигателями и шаговыми двигателями?
Инженерная истина гласит, что идеального решения не существует — есть только лучшее решение для имеющейся проблемы. Это относится, в частности, к серводвигателям и шаговым двигателям. Оба широко используются в промышленности. Тоже не универсальное решение. Однако при правильном применении как шаговые, так и серводвигатели могут обеспечить эффективное и надежное питание для очень успешной системы. Дерево решений для выбора между ними имеет много ветвей, но наиболее важными из них являются скорость, ускорение и целевая цена.
Это относится, в частности, к серводвигателям и шаговым двигателям. Оба широко используются в промышленности. Тоже не универсальное решение. Однако при правильном применении как шаговые, так и серводвигатели могут обеспечить эффективное и надежное питание для очень успешной системы. Дерево решений для выбора между ними имеет много ветвей, но наиболее важными из них являются скорость, ускорение и целевая цена.
Шаговые двигатели
Шаговые двигатели состоят из ротора с постоянными магнитами и неподвижного статора с обмотками. Когда ток проходит через обмотки статора, он создает распределение магнитного потока, которое взаимодействует с распределением магнитного поля ротора, создавая вращающую силу. Шаговые двигатели имеют очень большое количество полюсов, обычно 50 и более. Драйвер шагового двигателя подает питание на каждый полюс последовательно, так что ротор вращается с серией приращений или шагов. Из-за очень большого количества полюсов движение кажется непрерывным.
Шаговые двигатели имеют ряд положительных качеств. Поскольку они генерируют пошаговое движение, они обычно работают без обратной связи, что устраняет стоимость и сложность энкодера или резольвера. Большое количество полюсов позволяет им генерировать очень высокий крутящий момент при нулевой скорости. Они компактны и в целом экономичны (рис. 1) .
Поскольку они генерируют пошаговое движение, они обычно работают без обратной связи, что устраняет стоимость и сложность энкодера или резольвера. Большое количество полюсов позволяет им генерировать очень высокий крутящий момент при нулевой скорости. Они компактны и в целом экономичны (рис. 1) .
Шаговые двигатели обеспечивают хорошую производительность по экономичной цене для приложений, требующих низкой скорости, ускорения и точности. (Предоставлено Коллморгеном)
С другой стороны, шаговые двигатели имеют ограничения по скорости. Как правило, лучше всего они работают при 1200 об/мин или ниже. Хотя они создают высокий крутящий момент при нулевой скорости, крутящий момент падает по мере увеличения скорости (рис. 2) . Например, двигатель, который генерирует 100 унций на дюйм при нулевой скорости, может выдавать только 50 унций на дюйм при 500 об/мин и всего 10 унций на дюйм при 1000 об/мин.
Теоретически для увеличения крутящего момента можно использовать редуктор, но именно здесь низкая скорость шаговых двигателей становится проблемой.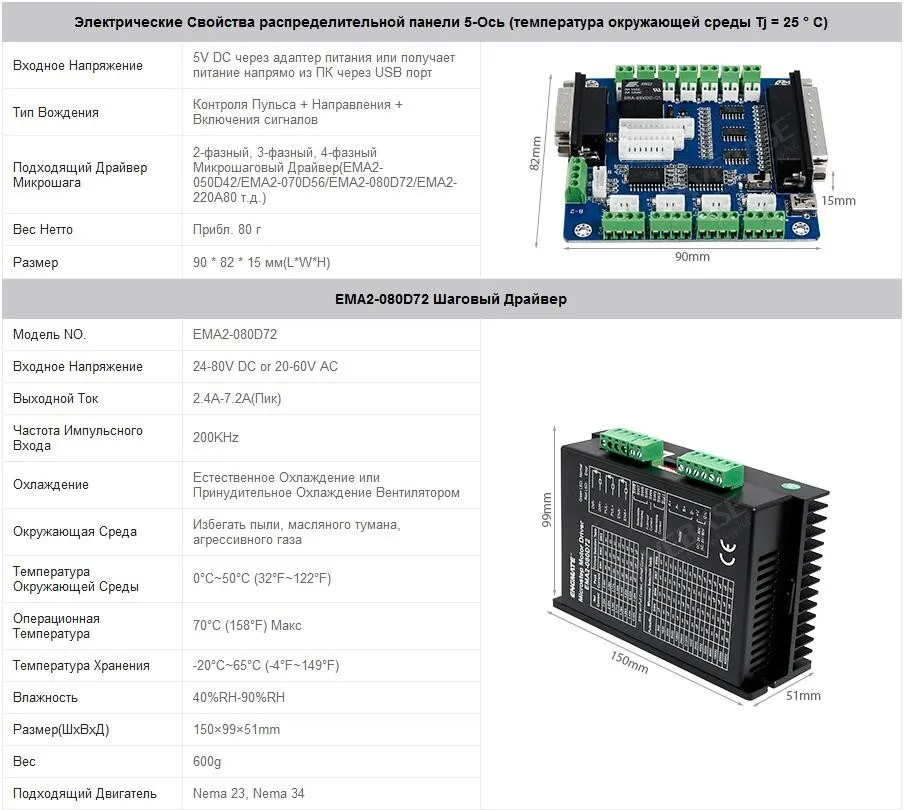 Добавление редуктора 10:1 к шаговому двигателю со скоростью 1200 об/мин может увеличить крутящий момент на порядок, но также снизит скорость до 120 об/мин. Если двигатель используется для привода шарико-винтовой передачи или аналогичного устройства, он, вероятно, не будет развивать скорость, достаточную для удовлетворения потребностей приложения.
Добавление редуктора 10:1 к шаговому двигателю со скоростью 1200 об/мин может увеличить крутящий момент на порядок, но также снизит скорость до 120 об/мин. Если двигатель используется для привода шарико-винтовой передачи или аналогичного устройства, он, вероятно, не будет развивать скорость, достаточную для удовлетворения потребностей приложения.
Шаговые двигатели, как правило, не доступны с типоразмерами больше, чем NEMA 34, при этом большинство приложений подпадают под размеры двигателей NEMA 17 или NEMA 23. В результате редко можно найти шаговые двигатели, способные создавать крутящий момент от 1000 до 2000 унций-дюймов.
Как видно из этих кривых зависимости крутящего момента от скорости, шаговые двигатели обеспечивают максимальный крутящий момент при нулевой скорости, при этом крутящий момент падает по мере увеличения скорости (зеленый). Напротив, крутящий момент серводвигателя остается примерно постоянным во всем рабочем диапазоне (синий и красный). (Предоставлено Коллморгеном)
Шаговые двигатели также имеют ограничения по производительности. Вы можете думать о шаговом двигателе как о системе с массой пружины. Двигатель должен прервать трение, чтобы начать вращаться и перемещать нагрузку, и в этот момент ротор не полностью контролируется. В результате команда на продвижение на пять шагов может привести к тому, что двигатель повернется только на четыре или шесть шагов.
Вы можете думать о шаговом двигателе как о системе с массой пружины. Двигатель должен прервать трение, чтобы начать вращаться и перемещать нагрузку, и в этот момент ротор не полностью контролируется. В результате команда на продвижение на пять шагов может привести к тому, что двигатель повернется только на четыре или шесть шагов.
Если привод дает команду двигателю продвинуться на 200 шагов, он сделает это с точностью до нескольких шагов, что в этот момент представляет собой ошибку в несколько процентов. Хотя мы управляем шаговыми двигателями с разрешением обычно от 25 000 до 50 000 шагов на оборот, поскольку двигатель представляет собой систему пружины и массы под нагрузкой, наше типичное разрешение составляет от 2 000 до 6 000 шагов на оборот. Тем не менее, при этих разрешениях даже 200-шаговое перемещение соответствует доле градуса.
Добавление энкодера позволит системе точно отслеживать движение, но не сможет преодолеть базовую физику двигателя. Для приложений, требующих повышенной точности и разрешения позиционирования, серводвигатели являются лучшим решением.
Серводвигатели
Как и шаговые двигатели, серводвигатели имеют множество исполнений. Рассмотрим наиболее распространенную конструкцию, включающую в себя ротор с постоянными магнитами и неподвижный статор с обмотками. Здесь также ток создает распределение магнитного поля, которое воздействует на ротор, создавая крутящий момент. Однако серводвигатели имеют значительно меньшее количество полюсов, чем шаговые двигатели. В результате они должны работать в замкнутом цикле.
Как правило, серводвигатели более сложны, чем шаговые двигатели. Они работают значительно быстрее, чем шаговые двигатели, со скоростями порядка нескольких тысяч об/мин (рис. 3) . Это позволяет использовать серводвигатели с редукторами для обеспечения гораздо более высокого крутящего момента на полезных скоростях. Они также обеспечивают более постоянный крутящий момент во всем диапазоне скоростей двигателя. В отличие от шаговых двигателей они не имеют удерживающего момента как такового.
Работа в замкнутом контуре позволяет контроллеру/приводу дать команду на то, чтобы нагрузка оставалась в определенном положении, а двигатель постоянно регулировался, чтобы удерживать ее в этом положении. Таким образом, серводвигатели могут фактически обеспечивать удерживающий момент. Обратите внимание, однако, что сценарий крутящего момента при нулевой скорости зависит от правильного выбора двигателя для управления нагрузкой и предотвращения колебаний относительно заданного положения.
Серводвигатели с обратной связью с обратной связью обеспечивают высокую точность позиционирования в сочетании с большей скоростью и ускорением, чем шаговые двигатели. Компромисс заключается в увеличении стоимости, размера и сложности. (Предоставлено Kollmorgen)
В серводвигателях обычно используются редкоземельные магниты, в то время как в шаговых двигателях чаще используются менее дорогие обычные магниты. Редкоземельные магниты позволяют развивать более высокий крутящий момент в меньшем корпусе. Серводвигатели также получают преимущество в крутящем моменте за счет своего общего физического размера. Диаметр серводвигателя обычно варьируется от NEMA 17 до 220 мм. В результате сочетания этих факторов серводвигатели могут развивать крутящий момент до 250 футо-фунтов.
Серводвигатели также получают преимущество в крутящем моменте за счет своего общего физического размера. Диаметр серводвигателя обычно варьируется от NEMA 17 до 220 мм. В результате сочетания этих факторов серводвигатели могут развивать крутящий момент до 250 футо-фунтов.
Сочетание скорости и крутящего момента позволяет серводвигателям обеспечивать лучшее ускорение, чем шаговые двигатели. Они также обеспечивают повышенную точность позиционирования благодаря работе в замкнутом контуре.
Заключительные мысли
Серводвигатели обеспечивают неоспоримое преимущество в производительности. Однако с точки зрения повторяемости шаговые двигатели могут быть вполне конкурентоспособными. Этот момент поднимает распространенное заблуждение о шаговых двигателях, которое является мифом о потерянном движении. Как мы уже обсуждали ранее, пружинно-массовая природа шагового двигателя может привести к потере нескольких шагов. Однако, поскольку привод дает команду шаговому механизму переместиться в угловое положение, потерянные шаги не переносятся с одного вращения на другое.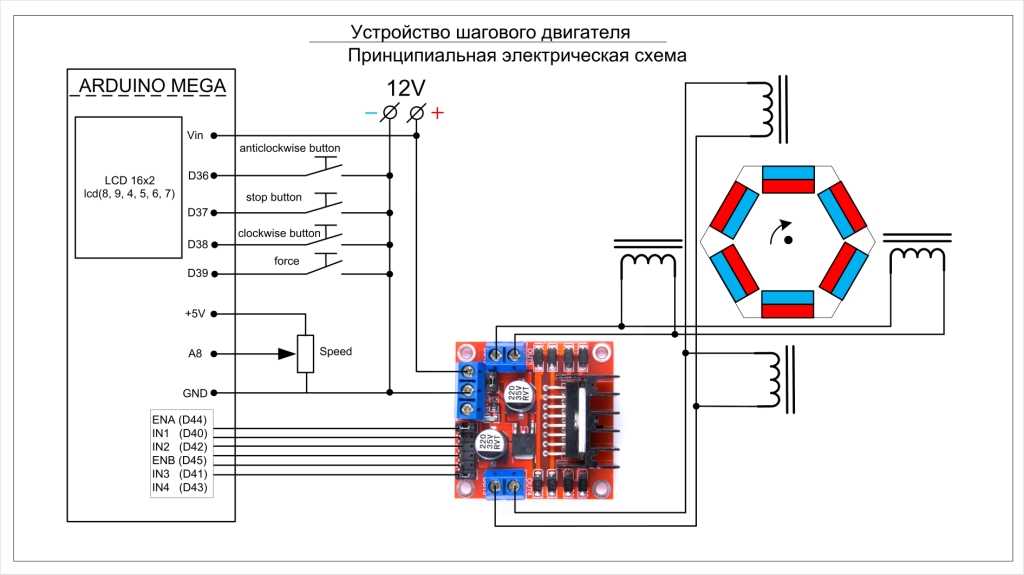 Вращение к вращению, шаговые двигатели очень воспроизводимы. Ищите более подробное обсуждение этой темы в следующем сообщении в блоге.
Вращение к вращению, шаговые двигатели очень воспроизводимы. Ищите более подробное обсуждение этой темы в следующем сообщении в блоге.
Приведенное выше обсуждение подводит нас к последнему ключевому различию между шаговыми осями и сервоосями, а именно стоимости. Шаговые двигатели обычно не требуют обратной связи, в них используются менее дорогие магниты и редко используются редукторы. Из-за большого количества полюсов и их способности создавать удерживающий момент они потребляют меньше энергии при нулевой скорости. В результате шаговый двигатель может быть на порядок дешевле, чем сопоставимый серводвигатель.
Подводя итог, можно сказать, что шаговые двигатели являются хорошим решением для приложений с низкими требованиями к скорости, ускорению и точности. Шаговые двигатели также имеют тенденцию быть компактными и недорогими. Это делает эти двигатели подходящими для применения в медицине, биотехнологии, безопасности и обороне, а также в производстве полупроводников. Серводвигатели — лучший выбор для систем, требующих высокой скорости, высокого ускорения и высокой точности.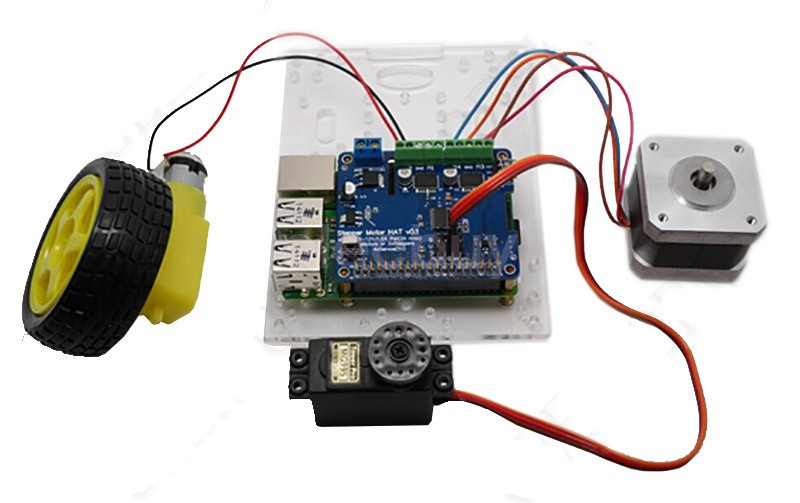 Компромисс — более высокая стоимость и сложность. Серводвигатели обычно используются в упаковке, конвертировании, обработке полотна и подобных приложениях.
Компромисс — более высокая стоимость и сложность. Серводвигатели обычно используются в упаковке, конвертировании, обработке полотна и подобных приложениях.
Если ваше приложение снисходительно, а бюджет — нет, подумайте о шаговом двигателе. Если производительность является наиболее важным аспектом, серводвигатель выполнит эту работу, но будьте готовы заплатить больше.
Что нужно знать для выбора подходящего двигателя
- Требования к крутящему моменту
- Требования к скорости
- Желаемое ускорение
- Масса нагрузки и инерция
- Бюджет
- Ограничения по размеру
Билл Лэки (Bill Lackey), вице-президент по инженерным продажам Motion Solutions Inc. Для получения дополнительной информации о шаговых двигателях и серводвигателях см.
Учебное пособие: Шаговый и серводвигатель
Это учебное пособие поможет вам понять различия между шаговым двигателем и серводвигателем и выбрать лучший двигатель для вашего приложения. Мы рассмотрим основы двигателей, включая конструкцию, ток, функции и особенности, вопросы, которые следует задать при выборе двигателя, примеры применения, ключевую терминологию и многое другое. Мы также предоставляем дополнительные ресурсы для получения дополнительной информации.
Мы рассмотрим основы двигателей, включая конструкцию, ток, функции и особенности, вопросы, которые следует задать при выборе двигателя, примеры применения, ключевую терминологию и многое другое. Мы также предоставляем дополнительные ресурсы для получения дополнительной информации.
Основы работы с двигателями: принцип работы шагового двигателя
Конструкция шагового двигателя
Большинство промышленных шаговых двигателей представляют собой гибридные шаговые двигатели, состоящие из ротора с постоянными магнитами и электромагнитного статора с обмоткой.
ТОК ШАГОВОГО ДВИГАТЕЛЯ
Постоянный ток используется для питания магнитных катушек шагового двигателя.
Ток, подаваемый от привода, создает магнитное поле, используемое для вращения вала двигателя. Ниже приведено базовое представление о том, как работает этот процесс.
1. Верхний электромагнит активируется, и зубья центральной шестерни выстраиваются соответственно.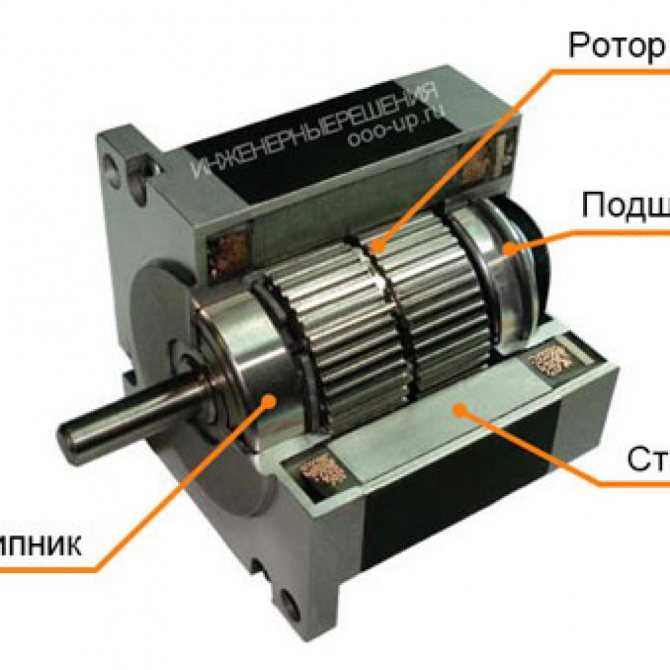
2. Верхний электромагнит деактивирован и правый включен. Ближайшие зубья шестерни подпрыгивают, чтобы выровняться с этим. Это вызывает шаг (например, поворот на 1,8°).
3. Деактивирован правый электромагнит и включен нижний. Затем зубья шестерни подпрыгивают, чтобы выровняться с нижним электромагнитом. Это вызывает еще один шаг.
4. Нижний электромагнит деактивирован, а крайний левый включен. Затем зубья шестерни прыгают, чтобы выровняться с этим. Это вызывает еще один шаг. На двигателе с углом шага 1,8° для полного оборота требуется 200 шагов.
Что еще нужно знать
1. Микрошаг увеличивает количество шагов на оборот.
2. Увеличение тока увеличивает крутящий момент двигателя.
3. Чем выше частота шага, тем выше скорость двигателя.
4. По мере увеличения скорости двигателя противо-ЭДС может уменьшить крутящий момент двигателя.
5. Обратная связь по положению не требуется, но не является обязательной.
Краткий обзор основ шагового двигателя
Постоянный ток создает магнитное поле. Это открытая система постоянного тока. Ток сохраняется, пока двигатель находится в состоянии покоя.
Преимущества
• Простая конструкция/управление
• Не требуется обратная связь
• Превосходный крутящий момент на низких скоростях
• Отличная низкая плавность низкой скорости
• Более низкая общая стоимость системы
Недостатки
• Снижение крутящего момента с увеличением скорости
• Постоянный ток, независимо от требований
• Невозможно реагировать на изменения нагрузки
Fun Stepper Stepper. fact
В 1920 году началось фактическое применение шаговых двигателей, так называемых шаговых двигателей типа VR (Variable Reluctance), используемых британским флотом для управления позиционированием и дистанционного управления.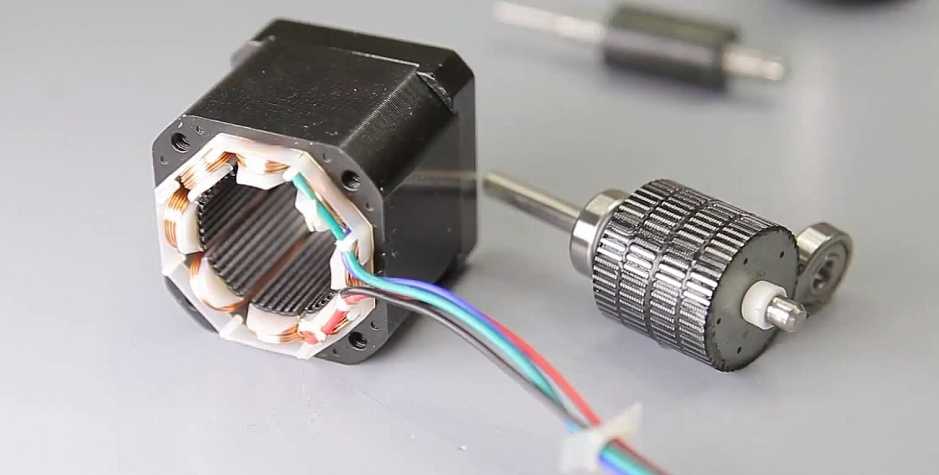
Основы двигателя: как работает двигатель SERVO
Конструкция двигателя SERVO
Серводвигатель переменного тока состоит из трехфазного статора и ротора с постоянными магнитами. Кроме того, для правильного управления током требуется обратная связь двигателя, такая как резольвер или энкодер.
ТОК серводвигателя
Трехфазный переменный ток используется для питания магнитных катушек серводвигателя.
При изменении тока в статоре изменяется магнитное поле трех фаз; заставляя постоянные магниты ротора совпадать с соответствующей фазой.
Что еще нужно знать
1. Увеличение тока увеличивает крутящий момент двигателя.
2. Чем выше частота тока, тем быстрее будет вращаться двигатель.
3. Сервоприводы контролируют и регулируют ток двигателя для более точного управления крутящим моментом.
4. Для правильного управления током требуется обратная связь двигателя.
Краткий обзор основ сервопривода
Трехфазный переменный ток создает магнитное поле. Это система с замкнутым контуром, которая постоянно отслеживает положение относительно заданного положения и соответствующим образом регулирует ток. Тормоз двигателя требуется для удерживающего момента на нулевой скорости.
Это система с замкнутым контуром, которая постоянно отслеживает положение относительно заданного положения и соответствующим образом регулирует ток. Тормоз двигателя требуется для удерживающего момента на нулевой скорости.
Преимущества
• Контроль с замкнутым циклом
• Более высокий крутящий момент при более высокой скорости
• Более низкий нагрев двигателя
• Лучший выбор для систем переменной нагрузки
Disadvantages
Disdavantages
77. – требуется настройка
• Требуется обратная связь по положению
• Более высокая общая стоимость системы
забавный серво факт
Автофокус камеры использует точный серводвигатель, встроенный в камеру, который корректирует положение объектива для повышения резкости -фокус изображения.
шаговый двигатель или сервопривод?: выбор двигателя
выбор правильного двигателя
Когда вы запускаете приложение движения, вы выбираете двигатель на основе конструктивных критериев или привычки? Вы выбираете сервопривод, потому что это то, что вы всегда используете? Вы выбираете степпер только для простых приложений?
Этот раздел поможет вам понять вопросы, которые вы должны задать, чтобы найти лучший двигатель для применения.
вопроса, которые нужно задать
1.Какой груз мне нужно перевезти?
2. С какой скоростью мне нужно бегать?
3. Меняется ли моя нагрузка во время переезда?
4. Есть ли какие-либо специальные функции, которые мне нужны, например, удерживающий крутящий момент или ограничение крутящего момента?
5.Каков мой бюджет?
6. Какой двигатель лучше всего подходит для моего применения?
1. Какой груз мне нужно перевезти? (крутящий момент)
Когда мы выбираем двигатель для приложения, нам нужно знать, какой крутящий момент может обеспечить двигатель. Для этого мы используем кривую крутящего момента двигателя. Вот типичная кривая крутящего момента серводвигателя.
2. С какой скоростью мне нужно бегать? (крутящий момент + скорость)
Часто считается, что серводвигатели превосходят шаговые двигатели эквивалентного размера. Но это часто не так. Вот кривая крутящего момента шагового двигателя эквивалентного размера по сравнению с кривой крутящего момента сервопривода.
На высоких скоростях крутящий момент шагового двигателя приближается к нулю, в то время как серводвигатель обеспечивает постоянный крутящий момент во всем диапазоне скоростей.
3. Меняется ли моя нагрузка во время переезда?
Серводвигатели обладают дополнительной способностью обеспечивать пиковый крутящий момент на короткие промежутки времени для преодоления колебаний нагрузки и более высокого ускорения двигателя.
4. Специальные функции: Удержание крутящего момента
Шаговые двигатели могут обеспечивать полный крутящий момент в состоянии покоя, когда обмотки находятся под напряжением, удерживать нагрузку от внешней силы, когда ротор не вращается — Удерживающий крутящий момент . Эта функция делает шаговые двигатели хорошим выбором для случаев, когда необходимо удерживать нагрузку на месте.
4. Специальные функции: ограничение крутящего момента
Серводвигатели могут управлять крутящим моментом двигателя посредством точного контроля тока, подаваемого на двигатель, и ограничивать его таким образом, чтобы не было превышено определенное значение крутящего момента – ограничение крутящего момента .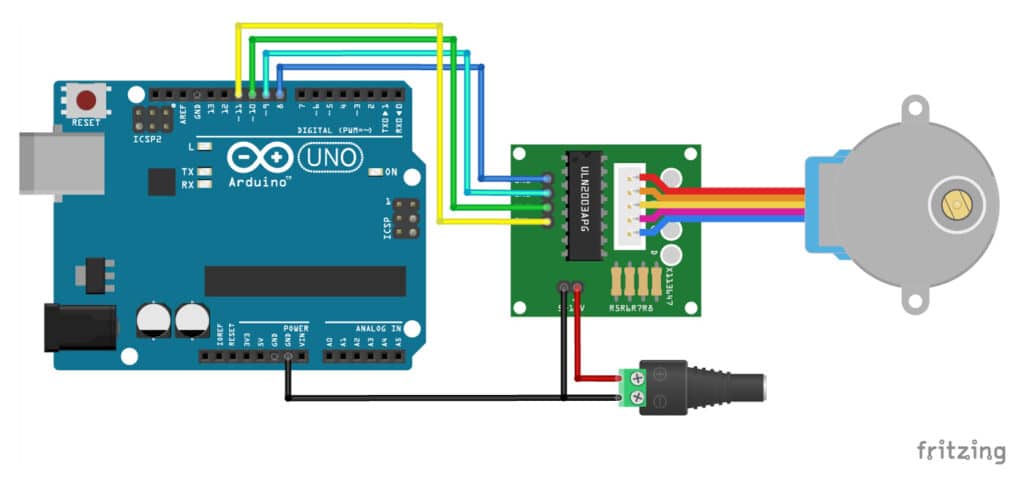 Благодаря преимуществам управления крутящим моментом можно реализовать многие приложения, требующие точного управления усилием при нажатии, вытягивании и скручивании.
Благодаря преимуществам управления крутящим моментом можно реализовать многие приложения, требующие точного управления усилием при нажатии, вытягивании и скручивании.
5. Каков мой бюджет: Расходы на шаговый двигатель
Шаговые двигатели обычно не требуют обратной связи, используют менее дорогие магниты и редко включают редукторы. Из-за большого количества полюсов и их способности создавать удерживающий момент они потребляют меньше энергии при нулевой скорости. В результате шаговый двигатель обычно дешевле, чем сопоставимый серводвигатель.
5. Каков мой бюджет: Стоимость серводвигателя
Серводвигатели требуют обратной связи, используют более дорогие магниты и часто включают редукторы. Они также потребляют больше энергии на нулевой скорости. В результате серводвигатель обычно дороже аналогичного шагового двигателя.
6. Какой двигатель лучше всего подходит для моего применения?
Управление двигателями сильно отличается при сравнении шагового двигателя с сервоприводом. Шаговый двигатель — это система с разомкнутым контуром, а сервопривод — система с замкнутым контуром. Проверьте свое приложение, чтобы определить, предоставляет ли один метод управления функции, отличающие его от другого.
Шаговый двигатель — это система с разомкнутым контуром, а сервопривод — система с замкнутым контуром. Проверьте свое приложение, чтобы определить, предоставляет ли один метод управления функции, отличающие его от другого.
При рассмотрении требований к применению необходимо учитывать несколько параметров, и приведенная ниже таблица является хорошей отправной точкой, помогающей разработчику выбрать более подходящую технологию.
когда следует выбирать шаговый двигатель
Рассмотрите возможность использования шагового двигателя, если ваше приложение соответствует любому из этих требований.
Высокий крутящий момент, низкая скорость
Короткие, быстрые, повторяющиеся движения
Желательно простое управление
Низкая скорость, высокая точность
Преимущества шага
Прочная конструкция
Высокая надежность означает отсутствие технического обслуживания
Настройка системы не требуется
Низкая стоимость системы
Когда выбрать решение
.
 Когда выбрать решение
Когда выбрать решение
. Когда выбрать решение.
Рассмотрите возможность использования сервопривода, если ваше приложение соответствует любому из этих требований.
Требуется высокая скорость
Динамические профили движения
Управление примененной силой
Преимущества сервопривода
Управление крутящим моментом
может выполнить комплексные команды движения
могут приспособиться к изменениям в нагрузке
Потребление мощности
Применение применение применение
4449 Приложение. : оси наладки
Автоматическая регулировка роликов
Особенности: Производитель хочет автоматизировать настройку роликов.
Цель: сократить время переналадки и повысить воспроизводимость между различными производственными установками.
Требования к применению:
Интеграция в существующее управление PLC
Время цикла менее 1 минуты
Сделайте микрорежирель по требованию
Положение монитора
Необходимо удержать позицию в REST
Решение
Лучшая плавность шагового двигателя на низких скоростях и
Удерживающий крутящий момент в состоянии покоя делает шаговый двигатель
лучшим выбором.
Сервоприложение: Динамический контроль крутящего момента
Capper
Специфика: OEM -Builder of Pilling Lines нуждается в линии Linear and Rotary Actaute Actaute Actain As Antaver As Antembuilder для линий бутылки. операция укупорки.
Цель: точно установить колпачок и сообщить о любых отсутствующих или неправильно установленных колпачках.
Требования к применению:
Интегрируйте в существующий контроль PLC
Очень высокая пропускная способность
Cap On Torque Limit
Несколько продуктов
Раствор
положения двигателя и управления током.
Ограничение крутящего момента сервопривода дает системе
возможность точно накладывать колпачки на правильный колпачок
по крутящему моменту.
AMCI Integrated Motion Solutions
Двигатель + привод + контроллеры
Семейства интегрированных двигателей AMCI представляют собой комплексное решение, объединяющее двигатель, привод и контроллер в одном пакете, обеспечивающем максимально простую установку. .
.
Ключевая терминология
Замкнутый контур : Система, в которой выход измеряется и сравнивается с входом. Затем выход регулируется для достижения желаемого состояния. В системе движения датчик скорости или положения (или и того, и другого) используется для генерации корректирующих сигналов путем сравнения с требуемыми параметрами
Удерживающий крутящий момент : Максимальная внешняя сила или крутящий момент, которые могут быть приложены к остановленному двигателю, находящемуся под напряжением, без непрерывного вращения двигателя.
Микрошаг : Метод управления, который пропорционально распределяет ток в обмотке шагового двигателя для обеспечения промежуточных положений между полюсами.
Разомкнутый контур : Относится к системе движения, в которой не используются внешние датчики для подачи сигналов коррекции скорости или положения.
Номинальный крутящий момент : Способность двигателя создавать крутящий момент при заданной скорости.