Содержание
Первый шаг шагового двигателя — статья
Шаговый двигатель является традиционным исполнительным устройством многих электронных приборов и систем.
Автор не
только знакомит нас с устройством и принципами работы шагового двигателя, но и предлагает несложное
устройство,
состоящее из PIC процессора и драйвера, которое реализует различные режимы его работы.
Шаговый двигатель (далее ШД) представляет собой бесколлекторный двигатель постоянного тока с фиксированными
положениями вала. ШД предназначен в первую очередь для точного позиционирования вала без применения систем
обратной
связи. ШД широко применяются в автомобилях, бытовой радиоаппаратуре, компьютерах. На производстве основное
место
использования ШД – это автоматизированное технологическое оборудование.
Для получения общего представления о теории ШД и проверки этой теории на практике достаточно небольшого
объёма
информации – в пределах этой статьи. Однако, как и в любой предметной области, знаний для профессионального
освоения
предмета требуется намного больше.
Шаговый двигатель, в общем случае, – это двигатель, имеющий ротор, статор и несколько обмоток. Вал ШД
совершает поворот на фиксированный угол (шаг) при кратковременной подаче напряжения на обмотки в правильной
последовательности. Обычно обмоток 2 или 4. Для того чтобы заставить ШД вращаться, необходимо поочерёдно
подавать рабочее напряжение на обмотки двигателя в нужной полярности. Для ШД с двумя обмотками (биполярного
ШД) необходимо менять очерёдность и полярность подаваемых импульсов. ШД с 4 обмотками (униполярный ШД) проще
в управлении – для вращения вала
достаточно
поочерёдно подавать напряжение на каждую из четырёх обмоток.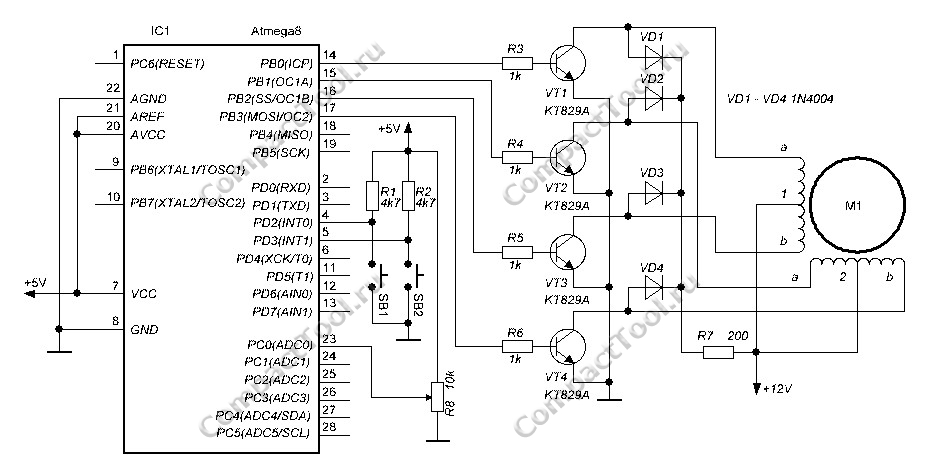 Вал двигателя при этом будет каждый раз
Вал двигателя при этом будет каждый раз
поворачиваться на
фиксированный шаг. Величина этого шага обусловлена конструкцией двигателя и составляет обычно единицы
градусов. Как
правило, чем меньше шаг двигателя, тем он дороже. Для формирования требуемой последовательности импульсов
применяются
микроконтроллеры в связке с силовыми элементами – драйверами. В простейшем случае драйвер представляет собой
транзисторный ключ. Также выпускаются специализированные драйверы в интегральном исполнении, рассчитанные на
разную
мощность и более сложные алгоритмы управления, например, с использованием обратной связи.
Для нашего примера используем ШД привода головки записи-чтения от 5,25″ флоппи-дисковода TEAC.
купить шаговый двигатель
купить блок управления шаговым двигателем
Это униполярный двигатель с 5 выводами: 4 обмотки и общий провод подачи питания 12 В. ШД имеет шаг 1,8
ШД имеет шаг 1,8
градуса.
Соответственно, для того чтобы вал совершил полный оборот, необходимо подать 200 импульсов. Для нашего
эксперимента не
подойдет ШД от современного 3,5″ дисковода. Там применяются биполярные двигатели, которые требуют более
сложной схемы
драйвера. Кроме того, качество исполнения ШД от трёхдюймового дисковода заметно ниже. Для небольших
униполярных
двигателей от CD-привода, принтера или флоппи-дисковода в качестве драйвера можно применить микросхему
ULN2003A (рис.
1). Это набор транзисторов по схеме Дарлингтона с открытым коллектором и защитным диодом в цепи нагрузки
(рис. 2).
Микросхема содержит в себе 7 каналов коммутации с током нагрузки до 0,5 А. В качестве микроконтроллера может
использоваться любой 8- или 16-разрядный процессор. В экспериментальной схеме (рис. 3) мы применяем
процессор PIC16F84
от Microchip, однако провести эксперимент с использованием данной программы можно практически на любом
процессоре
семейства PIC12…PIC18.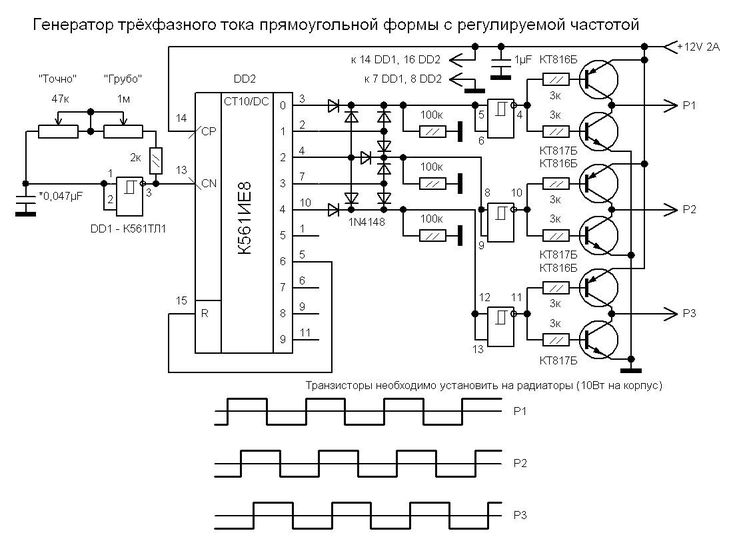
Программа 1 (Stepper1.asm) реализует вращение вала двигателя с
заданной
скоростью в одном направлении. Используется так называемый «полношаговый режим». Диаграмма подачи импульсов
на обмотки
приведена на рис. 4. Это простейший способ управления ШД со всеми присущему ему недостатками: повышенная
шумность,
колебания вала при перемещении от шага к шагу, особенно заметные при наличии массивной нагрузки на валу,
малое
количество шагов на оборот. В реальных системах используются более сложные алгоритмы управления ШД. Это
режимы
плавного разгона, микрошага, использование обратной связи по току и другие. В программе 2
(Stepper2.asm) реализован «полушаговый» режим
управления.
Здесь двигатель совершает в два раза больше шагов на оборот, т.е. теперь вал занимает и промежуточные
положения между
фиксированными углами поворота в 1,8 градуса. Это достигается одновременной подачей напряжения на две
Это достигается одновременной подачей напряжения на две
соседние обмотки
на чётных шагах (рис. 5). Полушаговый режим повышает плавность хода и снижает шум двигателя. Всего
программой подаётся
200 импульсов на обмотки двигателя, при этом вал поворачивается на угол 180 градусов. Затем следует пауза в
2 секунды
и происходит поворот на тот же угол, но в противоположном направлении. Далее цикл повторяется. Программа
хорошо закомментирована и достаточно «прозрачна». Изменением констант вы
сможете
задать другие углы поворота и скорость вращения вала. Следует учитывать, что предельная скорость вращения
ограничена
конструкцией используемого ШД и не превышает 150…200 оборотов в минуту в зависимости от режима управления.
Более
сложные алгоритмы управления выходят за рамки данной статьи.
Рис. 1 Схема драйвера ULN2003AРис. 2. Драйвер ULN2003A, схема одного канала
2. Драйвер ULN2003A, схема одного канала
Рис.3. Принципиальная схема устройства управления двигателемРис. 4. Диаграмма подачи импульсов на обмотки в полношаговом режимеРис. 5. Диаграмма подачи импульсов на обмотки в полушаговом режиме использования
Статья Олега Пушкарёва с сайта журнала «СОВРЕМЕННАЯ ЭЛЕКТРОНИКА»
приведена с сокращениями.
| Q: | Кто нибудь пользовался при строительстве монтировки шаговыми двигателями, как это описано у Мела Бартелса на http://zebu.uoregon.edu/~mbartels/altaz/altaz.html ? Особенно меня интересуют шаговые двигатели со старых 5 дюймовых дисководов. Хочу сделать простенькую монтировочку (AKA barndoor) для крепления только фотоаппарата и хочу приспособить вышеуказанный шаговый двигатель для этого. |
| A: | Вот схема управления для двигателя ПБМГ-200-365, импортные аналоги которого применялись в 5-дюймовых дисководах.  Схема реализует режим полушагов, т.е. полному Эта схема использовалась только для |
| Q: | А где вообще применяются шаговые двигатели, например тот который Вы описали.  В смысле где его можно поискать. А то в В смысле где его можно поискать. А то вдвух дисководах, котрые я разобрал стояли двухполярные шаговые двигатели с 2 обмотками и 4 выводами. Может быть мне надо поискать какие-то особые 5-ти дюймовые дисководы? |
| A: | Шаговый двигатель (ШД) я брал из 5″ дисковода, совсем старого, на 360/800kb. Все выброшенные дисководы, которые мне попадались, были снабжены именно такими (6-выводными) двигателями. Схема включения для 4-выводного двигателя. Базовые цепи транзисторных повторителей Есть |
| Q: | А ничего, что шаговый двигатель такой маленький? Насколько он мощный? Я имею в виду как Вы его используете? Неужели его хватает для приведение в движение телескопа? |
| A: | Мощности шагового двигателя от дисковода более чем достаточно для вращения телескопа с суточной скоростью. Другое дело, надо правильно выбрать передаточные соотношения редуктора (шаг ведущего винта и т. 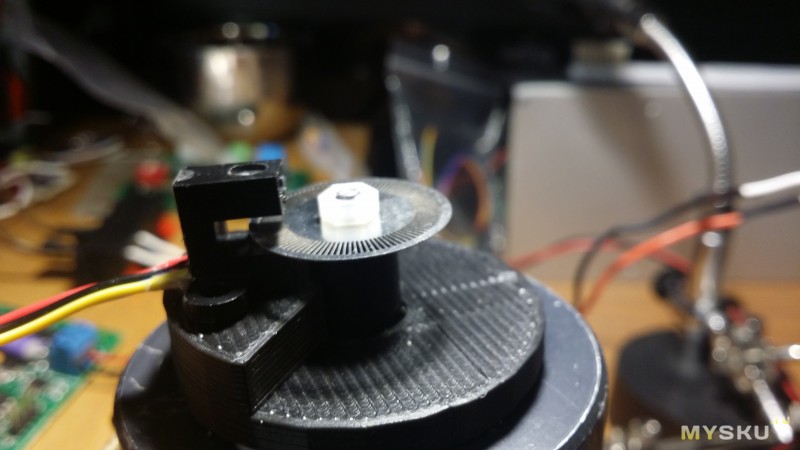 п.). п.). |
| Q: | Я купил 2 ШД от ооочень старых дисководов с 6 выводами. Вот его описание The TEAC 14769070-10 stepper motor, from a PC clone half-height 5.25″ floppy disk drive, has six wires — two Brown, Yellow, Red, Blue and White. Стал я разбираться со схемой Бартелса. И нашел 3 неизвестных для меня радиокомпонента: Hex invertor 74LS04, Zenner diod 30V 5W. Какие у этих странных компонент есть русскоязычные аналоги. И еще одно загадочное устройство квадрат с надписью 7805. 3 вывода и никаких обозначений. Подскажит аналог транзистора TIP120? |
| A: | Сопротивления обмоток ШД от 5″ дисководов (тех, что мне попадались) — 70 Ом. 74LS04 = К555ЛН1, Zenner diod = стабилитрон, 7805 = КР142ЕН5А. У Бартелса нарисованы именно Сильно греться шаговики будут, TIP 120 — мощный составной Потребление ДШИ-200-1 можно Двигатель ДШИ-200-1-1 стоит в |
| Помещаю схему для barn-door. Схема сделана для 6-выводного двигателя от C1 = C2 = 150 пФ, | |
| Действие 2 | |
| Q: | У меня к вам есть вопрос. Я уже месяца 3 пытаюсь заставить работать схему … Но ситуация с этой схемой поставила меня в тупик. Первое: Двигатель крутится только когда частота на делителе 256 и 128 Гц. Ни на большей, ни на меньшей (что странно) не работает.  Пищит, гудит и Пищит, гудит ивсе. Второй прикол (иначе не назову). Скорость вращения ЗАВИСИТ от напряжения, подаваемого на схему. Чем больше напряжение — тем выше скорость. Двигатель крутится как-то нестабильно.Чуть его тронешь — останавливается и гудит. Какие, так сказать, контрольные точки на этой схеме проверять. Что там должно (или не должно) быть? |
| A: | Судя по описанию, похоже на неправильную фазировку обмоток, хотя может быть и другое, например, неисправность одного из выходных транзисторов. В точках A, B, C, D должен быть сигнал вида «бегущая единица», т.е. одинаковые положительные прямоугольные импульсы длительностью 1/4 периода, сдвинутые между собой тоже на 1/4 периода. Такие же, в принципе, импульсы должны быть и на обмотках двигателя, только проинвертированные («бегущий ноль») и не совсем прямоугольной формы.  Главное, на всех четырех выходах импульсы Главное, на всех четырех выходах импульсыдолжны быть примерно одинаковой формы. Использовали ли Вы именно такой двигатель, как в схеме (шестивыводный)? Как определяли распайку обмоток? Прозванивали ли обмотки (может где обрыв есть)? На рис.1 |
| Принять участие в «постановке пьесы» можно здесь | |



 Используя
ИспользуяИспользование дисковых приводов
Автор Томи Энгдал
Зачем использовать компоненты от старых дисководов
Вы можете спросить, зачем использовать компоненты от старых дисководов.
Ответ заключается в том, что в дисководах много дорогих компонентов.
и вы можете получить старые плохие диски бесплатно или очень дешево.
Они являются хорошими источниками для следующих компонентов с не
много усилий:
1. Малые шаговые двигатели и контроллеры
2. Оптические датчики или микропереключатели
3. Двигатель постоянного тока с точной регулировкой скорости
4. Полезные детали точной механики для небольших проектов
Описание интерфейса дисковода
Распиновка разъема питания
Обычные дисководы для гибких дисков обычно используют источники питания +12 В и +5 В.
Они могут нагрузить каждую силовую линию током менее 100 мА до
до даже более 1 А. Это зависит от модели дисковода.
Вот распиновка разъема питания, если посмотреть на разъем типа CEE.
на обратном пути:
_______ / \ | 1 2 3 4 | |_________| Пин Функция 1 +5 В 2 Земля 3 Земля 4 +12 В
Шугарт интерфейс дисковода
В следующей таблице показаны сигналы наиболее часто используемых
компьютеры с гибкими дисками.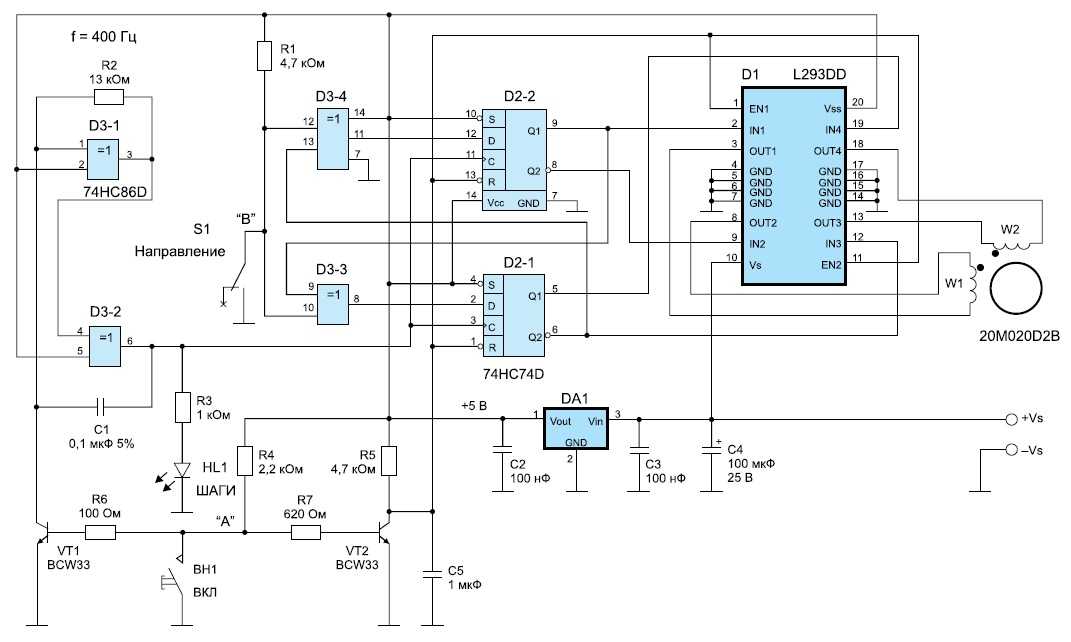 Распиновка какая-то де-факто
Распиновка какая-то де-факто
и использование определенных сигналов может быть различным в различных
системы. Этот интерфейс используется как в ПК, так и в компьютерах Amiga.
но использование и обработка различных сигналов различны.
В любом случае эти сигналы всегда являются сигналами уровня TTL.
Функция контакта 1 земля 2 Выбор высокой плотности 4 Загрузка головы / В использовании, выброс 6 Выбор привода 3 8 Индексный импульс + 10 Выбор привода 0 / Двигатель вкл. A 12 Выбор привода 1 / Выбор привода B 14 Выбор привода 2 / Выбор привода A 16 Двигатель включен / Двигатель включен B 18 направление 20 Шаг 22 Запись данных 24 Разрешить запись 26 нулевой трек + 28 Защита от записи + 30 Чтение данных + 32 Выберите голову 34 Диск изменен + / готов + 3-33 Нечетные контакты - GND
Сигналы дисководов ПК/АТ
Компьютеры PC/AT используют эти сигналы дисководов следующим образом.
В этой системе приводы соединены перемычками типа A или B в зависимости от
ситуация. Обычно в системах ПК и АТ используется специальный кабель,
изменяет отдельные положения привода A и двигателя B и выбирает сигналы включения
между разъемами дисковода. Это дает возможность иметь
Это дает возможность иметь
оба диска должны быть соединены перемычкой как диск А, и один диск работает в этом
путь как А, а другой как Б.
Контакт Функция Направление 1 земля 2 Выбор высокой плотности ??? 8 Индексный импульс от привода 10 Двигатель на А для привода 12 Привод выберите B для привода 14 Привод выберите A для привода 16 Двигатель Включен B для привода 18 Направление движения 20-шаговый импульс для привода 22 Запись данных на диск 24 Разрешить запись в привод 26 Нулевой трек от привода 28 Защита от записи с диска 30 Чтение данных с диска 32 Выберите головку для привода 34 Диск изменен??? 3-33 Нечетные контакты - GND
Как использовать шаговый двигатель дисковода
Какие типы шаговых двигателей используются в дисководах?
В дисководах для гибких дисков используются шаговые двигатели для управления чтением/записью.
положение головы. Даже первые жесткие диски также использовали степперы, но
в настоящее время жесткие диски заменили тепперы сервоприводом со звуковой катушкой.
моторы.
Шаговые двигатели, используемые в 5 1/4-дюймовых дисководах для гибких дисков, обычно перемещают
чтение/запись с помощью колеса и пружинного механизма, который работает
довольно хорошо. Согласно одному источнику информации, эти шаговые двигатели, используемые в
дисководы обычно имели модели с шагом 200 или 400 шагов на оборот.
Модели со скоростью 200 шагов на оборот используются в стандартной плотности.
(40 треков на диск)
диски. Флоппи-дисководы высокой плотности имеют 80 дорожек и используют
Шаговые двигатели 400 шагов на оборот.
Еще один источник информации говорит, что в старых дисках степперы
каждый шаг составлял 3,6 градуса, что означает, что для полного поворота требуется 100 шагов,
в HD-дисках каждый шаг составлял 1,8 градуса, т.е. 200 шагов.
Я не рассчитывал точное число шагов самостоятельно, поэтому
Я не совсем уверен, какой из них правильный
(Может быть, на разных драйверах могут использоваться разные моторы,
была другая механика привода)
Какой бы тип у вас ни был, эти моторы
очень полезны для ваших собственных проектов. Шаговые двигатели обычно используют
Шаговые двигатели обычно используют
Питание +12 В, но некоторые новые маломощные накопители используют источник питания +5 В.
для привода шаговых двигателей.
Маленькие 3 1/2-дюймовые дисководы для гибких дисков обычно используют винтовой механизм, где
Двигатель вращает винтообразную ось, которая перемещает головку чтения/записи.
Этот тип механики позволяет изготавливать приводы меньшего размера.
и в зависимости от характеристик винта мотор может иметь больший
шаги. Эти двигатели обычно питаются от источника +5В, т.к.
многие современные 3 1/2-дюймовые приводы используют только источник питания +5 В.
Как использовать эти моторы в своих проектах
Шаговые двигатели весьма полезны для робототехники, плоттеров и
контролировать проекты. Шаговые двигатели — это точный способ создания
нужные механические движения. Шаговые двигатели не очень
мощный или быстрый (около 300 шагов/сек).
Вы можете создать свой собственный контроллер или использовать готовые контроллеры с
их.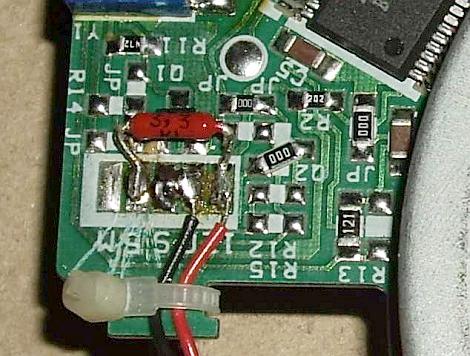 Вам просто нужно определить тип, проводку и рабочее напряжение
Вам просто нужно определить тип, проводку и рабочее напряжение
шаговые двигатели, чтобы иметь возможность их использовать. К сожалению, шаговые двигатели
не самые простые в управлении типы двигателей и готовые контроллеры обычно
довольно дорого. Если вы хотите сделать свой собственный контроллер для шагового двигателя
двигатель взят с дисковода, тогда взгляните на
http://www.epanorama.net/counter.php?url=http://www.doc.ic.ac.uk/~ih/doc/stepper/.
Когда вы только что вынули двигатель из дисковода, вы можете
подумал, что должен быть еще и шаговый контроллер внутри
Электроника дисковода. Вы правы, что есть контроллер,
который способен управлять двигателем. Подавать сигналы довольно просто
к этому контроллеру, используя параллельный порт ПК и небольшую программу.
Как использовать контроллер в электронике дисковода
Контроллер в электронике дисковода может быть успешно
используется следующим образом:
1. Электронике требуется +5В для работы и обычно +12В для двигателей
2. Если дисковод имеет функцию автоматического перехода на нулевую дорожку
Если дисковод имеет функцию автоматического перехода на нулевую дорожку
powerup, вы должны отключить эту опцию, если вы не хотите использовать это
опция и обнаружение нулевого трека в вашем проекте. Этот вариант
можно найти у современных дисководов, а у старых дисков его нет. Иногда есть перемычка для включения и отключения этой опции.
3. Убедитесь, что электронике не нужно определять диск в
привода, чтобы иметь возможность перемещать шаговый двигатель. Этот датчик можно легко
легко сделать, чтобы дать электронике информацию о том, что диск находится в приводе.
Вам нужно только приклеить ленту или клей к датчику, чтобы сделать его
думаю, что диск всегда находится в приводе. Вы также можете выполнить это
отрезав один провод или добавив один дополнительный провод для обхода датчика.
4. Используйте сигнал выбора привода для выбора электроники привода. Затем используйте
импульсные сигналы направления и шага для управления шаговым двигателем.
Сигналы управления шаговым двигателем интерфейса дисковода
Следующие сигналы используются для управления дисководом
схема контроллера шагового двигателя. Сначала нужно выбрать
Сначала нужно выбрать
привода, подключив правильный сигнал выбора привода к земле.
Затем вы используете сигнал направления, чтобы выбрать направление, которое
Вы хотите, чтобы двигатель сделал шаг. Шаг управляется с помощью
ступенчатый импульсный сигнал, который обычно имеет высокий уровень. Один низкий импульс
импульсная линия шага заставляет двигатель делать один шаг. Убеждаться
что импульсные сигналы длиннее 1 микросекунды и вы не отправляете
затем быстрее, чем двигатель может делать шаги.
Контакт Функция Направление 1 земля 12 Привод выберите B для привода 14 Привод выберите A для привода 18 Направление движения 20-шаговый импульс для привода 26 Нулевой трек от привода 3-33 Нечетные контакты - GND
Существуют ограничения на скорость импульсов, которые могут принимать эти дисковые накопители.
Ограничения в основном электромеханические (насколько быстро шаговый двигатель
мотор может среагировать), но иногда электроника может его ограничить.
Для дисководов, таких как дисковод гибких дисков NEC FD1155C (высокой плотности)
кажется, что минимальное время цикла, необходимое для шагового импульса
составляет 6 мс при рабочем цикле 50 %.
А для NEC FD1053 (Low-density) импульс такта шага должен быть не менее 10 мс.
Для сигнала направления кажется, что привод
выберите сигнал направления на положительном фронте ступенчатого сигнала.
Принимайте их не как абсолютные гарантии, а как общие рекомендации.
с чего начать экспериментировать.
Параллельный порт ПК для интерфейса шагового двигателя
Это простой пример управления шаговым двигателем дисковода.
через параллельный порт ПК. Я ожидаю, что диск подключен к
быть как диск A. Номера контактов параллельного порта соответствуют
Нумерация 25-контактного разъема находится на задней панели вашего ПК.
Подключите контакт 20 параллельного порта (земля) к контактам 17 и 19 разъема дисковода.
(земля).
Подключите контакт 14 разъема дисковода (выбор диска A) к разъему дисковода.
17 (земля).
Подключите контакт 2 параллельного порта (D0) к контакту 20 разъема дисковода (шаговый импульс).
Подключите контакт 3 параллельного порта (D1) к контакту 18 разъема дисковода (направление).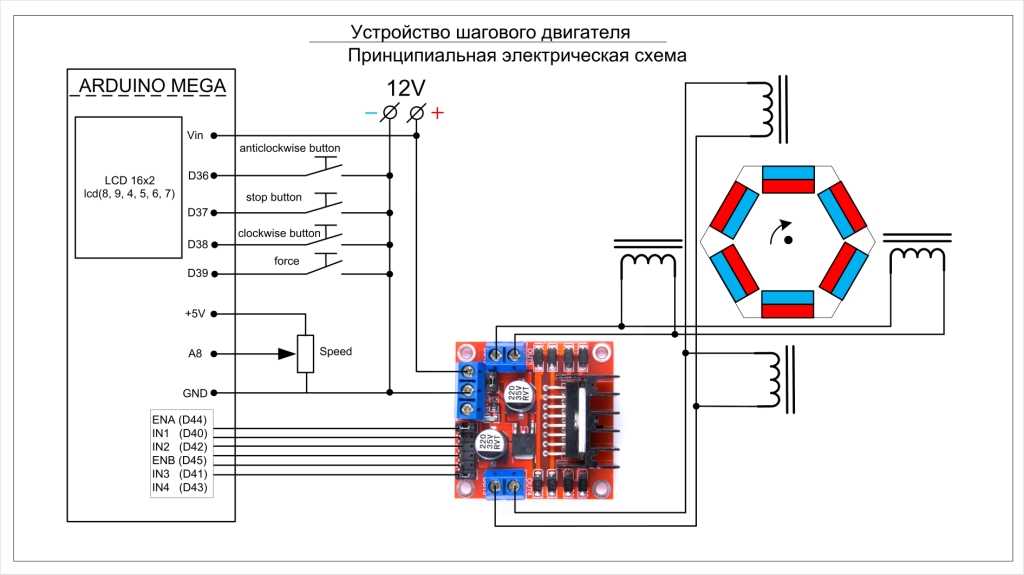
Параллельный порт (25 контактов) Дисковод (34 контакта)
2 ------------------------- 20
3 ------------------------- 18
+--- 14
20 ---------------------+--- 17
+----19
Таким образом, вы сделали кабель, с помощью которого вы можете легко управлять
шаговый двигатель, используя выводы данных параллельного порта D0 и D1. Те
выводами можно легко управлять в вашем программном обеспечении, напрямую записывая
к оборудованию параллельного порта. Вы не можете использовать DOS, BIOS или другие операционные
системные функции, потому что этот интерфейс не генерирует квитирование
сигналы, которые нужны этим процедурам.
Непосредственно управлять параллельным портом очень просто.
Сначала вы должны прочитать адрес ввода-вывода из
область данных BIOS. Адрес ввода/вывода LPT1 представляет собой 16-битное слово, которое может
можно найти по адресу памяти 0008h в сегменте 0040h. Тогда вы просто
запишите данные, которые вы хотите отправить на выводы данных параллельного порта, на этот адрес ввода-вывода.
Написание может быть легко выполнено с помощью следующих команд в разных
языки: out на ассемблере, outp на borland c и port на паскале.
Вы можете найти более подробную информацию о программировании из моего
Параллельный порт стал легкой статьей.
Вы также можете попробовать исходный код Floppystepper C++ для DOS из архива Circuit Cookbook.
Использование шагового двигателя в качестве двигателя постоянного вращения
Шаговые двигатели также могут использоваться в качестве постоянно вращающихся двигателей в приложениях.
где более медленная скорость, которую легко получить с помощью двигателя постоянного тока с прямым приводом
или скорость должна быть очень точно отрегулирована.
Шаговый двигатель дискового привода может быть легко использован в качестве свободно вращающегося двигателя.
с помощью контроллера шагового двигателя с дисковода.
Вам просто нужно активировать строку выбора привода, а затем выбрать вращение
направление с помощью направляющего штифта. Тогда все, что вам нужно, это отправить константу
тактовый сигнал на ступенчатый штифт (или регулируемый, если хотите). Подходящий
Подходящий
осциллятор можно довольно легко сделать, используя, например, микросхему таймера 555 или
от генератора, построенного на логических элементах ТТЛ.
Если вы соберете небольшую плату с чипом 555 (имея подходящие часы
импульсы на нужной вам частоте, от нескольких Гц до нескольких сотен Гц)
и несколько шагов для управления другими сигналами (один контролирует, если часы
с 555 попадает на дисковод, другое направление управления,
в-третьих, возможно, выберите диск).
С помощью такого контроллера вы можете запускать, останавливать,
шаг вперед/назад, вращение… Ничего страшного. Код не нужен!
Использование шаговых двигателей без электроники дисковода
Шаговые двигатели дискового привода состоят из двух катушек, которые перемещают двигатель.
в нужном направлении, когда ток подается на эти катушки
в правильном порядке. Следующие сигналы заставят двигатель остановиться.
бежать в одном направлении. Чтобы двигатель работал в другом направлении
необходимо инвертировать полярность сигналов одной из катушек
(два фазных провода).
Сигналы катушки 1
.......
Фаза 1 .....| |.........|
Фаза 2 ..... .........
|.........| |.......
Сигналы катушки 2
........ .........
Фаза 3 .| |........| |....
. ........ ....
Фаза 4 |........| |.........|
Сигналы могут быть представлены также в двоичном формате.
Общая последовательность (1 означает протекание тока, 0 означает разомкнутую цепь):
Фаза 1 00110011 Фаза 2 11001100 Фаза 3 01100110 Фаза 4 10011001
Дуглас В. Джонс
выложил в сеть проект по управлению шаговыми двигателями с помощью принтера
порт и немного простой электроники под названием
Пример работающего шагового двигателя. Это часть учебника по управлению шаговыми двигателями.
Как использовать двигатель вращения дисковода
Двигатели дисковых приводов довольно хорошие двигатели, довольно точная скорость
система контроля. Двигатели дисковода вращают диск со скоростью 300 или 360 об/мин.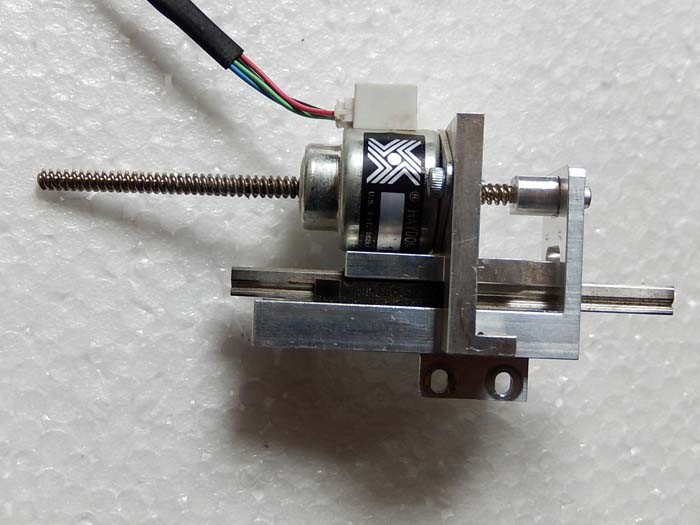
скорость. Стандартные диски используют 300 об/мин, но диски высокой плотности используют 360 об/мин.
об/мин или двигатели с выбираемой скоростью 300/360 об/мин.
Сигналы управления двигателем в интерфейсе дисковода
Вы можете заставить двигатель дисковода вращаться, когда вы включаете оба
выберите привод и включите двигатель, потянув эти сигналы на низкий уровень
логическое состояние. Это можно легко сделать, соединив оба сигнала
сигнализировать землю.
Сигнал высокой плотности может иметь какое-то отношение к выбору
скорость двигателя в дисководах с двухскоростными (300/360 об/мин) двигателями.
Я еще не нуждался и понял это.
Контакт Функция Направление 1 земля 2 Выбор высокой плотности ??? 10 Двигатель на А для привода 12 Привод выберите B для привода 14 Привод выберите A для привода 16 Двигатель Включен B для привода 3-33 Нечетные контакты - GND
Прочие полезные компоненты от дисководов
Дисковые накопители также являются хорошим источником для других компонентов.
Когда вы вынимаете двигатели из дисковода, вы можете легко
другие компоненты также. Обычно это оптические датчики или микропереключатели.
в дисководе, чтобы почувствовать вкладку защиты от записи. Эти компоненты
полезные датчики в ваших схемах робототехники, управляемых шаговым двигателем.
Многие вращающиеся двигатели с прямым приводом используют датчики Холла для определения
скорость вращения. Это может быть весьма полезным компонентом, если вы можете понять
как это связано.
Как насчет использования шаговых двигателей жестких дисков?
Многие старые жесткие диски также имели шаговые двигатели для управления.
чтение/запись движения головы. Многие современные двигатели дисководов
использовать системы управления звуковой катушкой, что делает другую историю.
В своих экспериментах я использовал жесткие диски с интерфейсом ST506/412.
Это оригинальные жесткие диски IBM PC/AT (обычно называемые MFM-дисками).
которому нужна управляющая карта. Современные диски ATA/IDE в основном
те же диски, но электроника контроллера интегрирована в диск
приводной электроники, что делает их более сложными и трудными в управлении.
В основном жесткий диск имеет те же основные элементы, что и гибкий диск.
привод: головка чтения/записи, двигатель перемещения головки, двигатель вращения диска,
датчики и электроника контроллера. Вы можете использовать эти разные компоненты
самостоятельно или использовать управляющую электронику, поставляемую с жестким диском
электроника привода. Шаговые двигатели того же типа, что и в гибких дисках.
дисков, хотя количество шагов/оборот может быть выше.
приводной вращающийся двигатель — это тот же тип бесшумного двигателя постоянного тока, который используется в современных
флоппи-дисководы, но они работают на гораздо более высокой скорости (около 3000-3600 об/мин).
Интерфейс жесткого диска ST506/412
Интерфейс жесткого диска ST506/412 представляет собой что-то вроде модифицированного гибкого диска.
интерфейс дисковода. Физический интерфейс в ST506/412 состоит
из двух разъемов: 34-контактный разъем управления и 20-контактный разъем данных.
Разъем управления нес всю информацию об управлении дисководом.
и разъем данных несет данные. Кабель контроллера идет
до двух интерфейсов управления жесткими дисками (может поддерживаться до четырех),
но каждый жесткий диск имеет
это собственный кабель для передачи данных.
91 водить
20 Индекс с диска
22 Готов к работе
24 Шаг к вождению
26 Привод выберите 1 для привода
28 Привод выберите 2 для привода
30 Drive выберите 3 для движения
32 Привод выберите 4 для привода
34 Направление движения
Контакты 1-33 все нечетные контакты заземлены
Разъем данных
Контакт Функция Направление 1 Диск выбран из дисков 3 зарезервировано 4 зарезервировано 7 зарезервировано 9сдержанный 10 зарезервировано 13 +MFM Запись данных в привод 14 -MFM Запись данных на диск 17 +MFM Чтение данных с накопителя 18 -MFM Чтение данных с накопителя Контакты 2,4,6,8,11,12,15,16,19 и 20 являются контактами заземления.
Использование приводов головки жесткого диска
Первоначально положение головы контролировалось
шаговый двигатель, который вращается в любом направлении за счет
реагировать на шаговые импульсы и двигать головой
сборка вперед и назад с помощью «стойки и
шестерня» или наматывая и разматывая ленту
крепятся к рычагам привода. Каждый импульс перемещался
Каждый импульс перемещался
сборка по поверхности с заранее определенными шагами или
фиксаторы. Каждый шаг представлял собой местоположение дорожки и
данные ожидались под заголовком.
Головные приводы, управляемые шаговым двигателем, не подходят для
текущие плотности привода и склонны к выравниванию
проблемы, вызванные трением, износом, теплом
деформация и отсутствие обратной связи
необходимо для исправления ошибки позиционирования. В настоящее время
жесткие диски используют приводы звуковой катушки, которые сложнее использовать
экспериментаторами.
Я провел несколько экспериментов с использованием степпера для жесткого диска.
Электроника двигателя и контроллера в моих собственных проектах. Шаговый двигатель
легко подключить тот же тип сигналов шага и детектирования, что и дисковые накопители.
Дополнительную информацию можно получить из глав о дисководах. Единственный
Отличие от дисковой системы в том, что электроника дисковода
может буферизовать сигналы движения, так что контроллер сохраняет
импульсы движения и выполняет движение после того, как контроллер получил
последний импульс движения.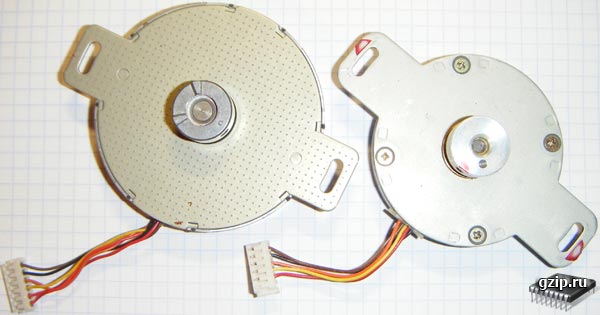
Контакты управления шаговым двигателем в интерфейсе ST506/412
Следующие сигналы от разъема управления необходимы для использования
контроллер шагового двигателя в электронике жесткого диска.
Наиболее важные сигналы для шагового двигателя
управляют сигналами Direction и Step. Сигналы направления работают
так что низкий логический уровень перемещает головку чтения/записи внутрь
(к центру диска) диска и высокий логический уровень
двигает головой наружу. Шаговый сигнал является активным низкоимпульсным сигналом.
Сигнал выбора привода должен быть активирован (низкий уровень) и ворота записи.
должен быть деактивирован (вытянут вверх), чтобы привод принял
сигналы управления шаговым двигателем.
Seek Complete, Ready и Track 0 предоставляют некоторую дополнительную информацию о статусе.
Контакт Функция Направление 6 Запись ворот в привод 8 Полный поиск с диска 10 Трек 0 с привода 22 Готов к работе 24 Шаг к вождению 26 Привод выберите 1 для привода 28 Привод выберите 2 для привода 30 Drive выберите 3 для движения 32 Привод выберите 4 для привода 34 Направление движения 1-33 все нечетные контакты заземлены
Процедура управления шаговым двигателем жесткого диска с использованием интерфейса ST506/412
Я использовал следующую процедуру для управления жестким диском
приводные шаговые двигатели (взято из Руководства по проектированию DP8466):
1.Деактивируйте линию WRITE GATE (контакт 6) 2. Активируйте линию DRIVE SELECT (контакты 26, 28, 30 или 32). 3. Подождите, пока сигналы READY и SEEK COMPLETE станут истинными. 4. Выберите направление сигналом DIRECTION. (контакт 34) 5. Отправьте импульсы движения по линии STEP. (контакт 24)
 Деактивируйте линию WRITE GATE (контакт 6)
2. Активируйте линию DRIVE SELECT (контакты 26, 28, 30 или 32).
3. Подождите, пока сигналы READY и SEEK COMPLETE станут истинными.
4. Выберите направление сигналом DIRECTION. (контакт 34)
5. Отправьте импульсы движения по линии STEP. (контакт 24)
Деактивируйте линию WRITE GATE (контакт 6)
2. Активируйте линию DRIVE SELECT (контакты 26, 28, 30 или 32).
3. Подождите, пока сигналы READY и SEEK COMPLETE станут истинными.
4. Выберите направление сигналом DIRECTION. (контакт 34)
5. Отправьте импульсы движения по линии STEP. (контакт 24)
Эксперименты с приводами головки звуковой катушки
Активатор звуковой катушки управляет
движение катушки к или от
постоянный магнит в зависимости от количества
ток, протекающий через него. Приводы звуковой катушки, используемые в системах с жесткими дисками
иметь ускорение к текущей передаточной функции.
Арматуры
прикреплены к этой катушке и перемещаются внутрь и наружу по
поверхность с ним. Сервоуправляемый привод звуковой катушки — очень точный метод, но
тоже очень чувствительный. Любое изменение тока может
привести к тому, что головка в сборе изменит положение и
нет заранее определенных позиций. По своей сути это
аналоговая система с точным количеством
движение контролируется точным количеством
применяется ток.
Фактическое положение катушки обычно определяется
сервоприводная (или индексирующая) информация, которая записывается в
привод от производителя. Точное местоположение дорожки данных (из
которых от 6000 до 10000 на дюйм) зависит от «встроенного сервопривода»
который представляет собой специальный рисунок, написанный на диске во время изготовления.
Результатом является то, что дорожка разделена на поля сервопривода, поля идентификатора и
поля данных.
Местоположение корректируется
на разные треки, читая и реагируя на эти
управляющие сигналы. Когда сервопривод
информация считывается, генерируется сигнал ошибки позиционирования (POS),
который указывает, как далеко вы находитесь от центра трассы. Сложная обратная связь
система преобразует эту ошибку в ток в звуковой катушке, и
голова движется назад к центру дорожки.
Из-за этой конструкции жесткий диск должен быть
достаточно хорошее рабочее состояние, так что головка звуковой катушки
Механизм управления будет работать. Позиционеры звуковой катушки всегда нуждаются в обратной связи,
и тщательно разработанные петлевые фильтры.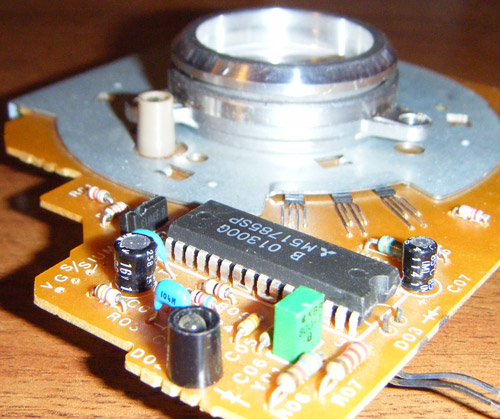
Если дисковод сортируется
работ и имеет знакомый вам интерфейс, то вы можете попробовать
управление, как если бы вы управляли шаговым двигателем дисковода
(просто с интерфейсом ST506/412).
Игра с поврежденным сервомеханизмом
Если жесткий диск поврежден настолько, что механизм управления
больше не работает, то очень трудно точно контролировать
Сервопривод звуковой катушки больше. Но есть один эксперимент, который вы можете сделать
со звуковыми катушками.
Вы можете управлять звуковой катушкой с помощью обычного
аудио усилитель и источник музыки. Сначала найдите провода, идущие к
звуковая катушка. Проверка сопротивления голоса. Если это
4 Ом или более, то вы можете попробовать управлять им напрямую, используя
аудио усилитель. Замените динамик звуковой катушкой и
начать играть музыку. Звуковая катушка будет двигаться вперед и назад
и вы можете даже услышать какой-то звук из музыки. Будь осторожен с
экспериментировать, потому что звуковая катушка может быть легко сброшена вниз
с чрезмерной мощностью, приложенной к звуковой катушке. И помните также, что вы можете
И помните также, что вы можете
повредить усилитель, если допустить ошибки при подключении.
Вы можете попробовать преобразовать звуковую катушку в своего рода ток для передачи положения.
функцию, добавив некоторый механизм, который пытается центрировать привод
когда ток не подается (можно попробовать пружины или маленькие кусочки мягкой резины).
Двигатели шпинделя
Большинство приводов имеют несколько пластин, разделенных
дисковые прокладки и закреплены на вращающемся шпинделе, который
поворачивает тарелки в унисон. Прямой привод, бесколлекторный DC
двигатель шпинделя встроен в шпиндель или установлен
прямо под ним. Шпиндель и пластины вращаются с постоянной
скорость, обычно 3600 об/мин, хотя более новые модели имеют
увеличил это до 4800, 5400 или 7200
Двигатель шпинделя получает управляющие сигналы через
замкнутая система обратной связи, которая стабилизируется до
постоянная скорость вращения. Сигналы управления поступают от
информация, записанная на поверхность(и) во время
производитель. В более старых приводах использовался магнитный тип Холла или катушки.
В более старых приводах использовался магнитный тип Холла или катушки.
датчики для определения скорости вращения.
Двигатели жестких дисков обычно начинают вращаться, после чего подается питание.
на жесткий диск. Сначала они разгоняют шпиндель до полной скорости.
Если управление сервоприводом не может работать должным образом или что-то в этом роде
другой идет не так на жестком диске, они обычно перестают вращаться
шпиндель.
Откуда у меня вся эта информация
Я получил большую часть этой информации в этих документах от многочисленных
некоторые статьи в группах новостей usenet alt.comp.hardware.homebuilt и
науч.электроника. Я также использовал некоторые справочники, чтобы проверить
некоторые факты и получить более подробную информацию. идеи, как
использовать эти моторы в своих проектах — моя идея. я использовал
части старых дисководов во многих моих электронных проектах (большинство
были только некоторые простые эксперименты).
Дополнительная информация
Если вы ищете готовый исходный код для шагового двигателя
управления двигателем, рекомендуется проверить документ Interfacing a Junk Disk 5-1/4 inch Drive with Parallel Port, написанный Towanda L.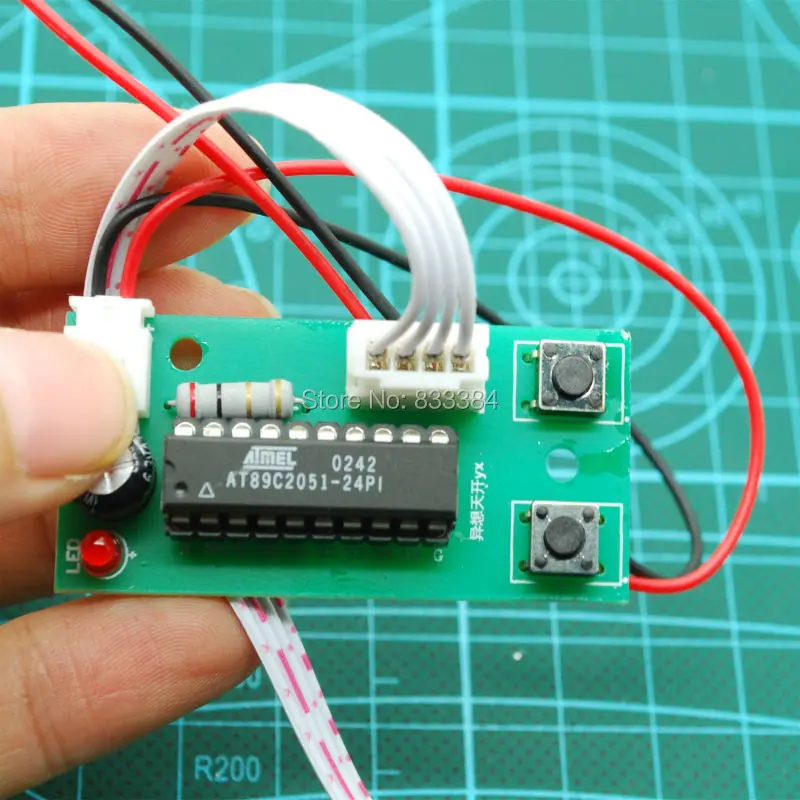 Malone. Эта бумага
Malone. Эта бумага
доступен по адресу http://www.epanorama.net/counter.php?url=http://www.eng.morgan.edu/~malone/dskdrv/dskdrv.html.
Список справочников
- Том Хоган, Справочник программиста по ПК, Microsoft Press, 1988
- DP8466 Disk Data Controller Design Guide / User’s Manual, National Semiconductor Corp, 1985
- Tandon 386 Engineer Краткий справочник 5b
- РУКОВОДСТВО ДЛЯ ТЕХНИКОВ ПО ПОДСИСТЕМАМ ЖЕСТКИХ ДИСКОВ ПК Николас Мейджорс
Томи Энгдал
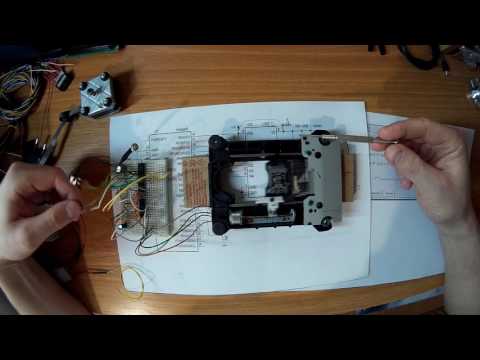
Запуск шагового двигателя дисковода
спросил
Изменено
4 года, 3 месяца назад
Просмотрено
6к раз
\$\начало группы\$
Я хочу узнать, как работает гибкий шаговый двигатель, чтобы впоследствии управлять им с помощью Arduino.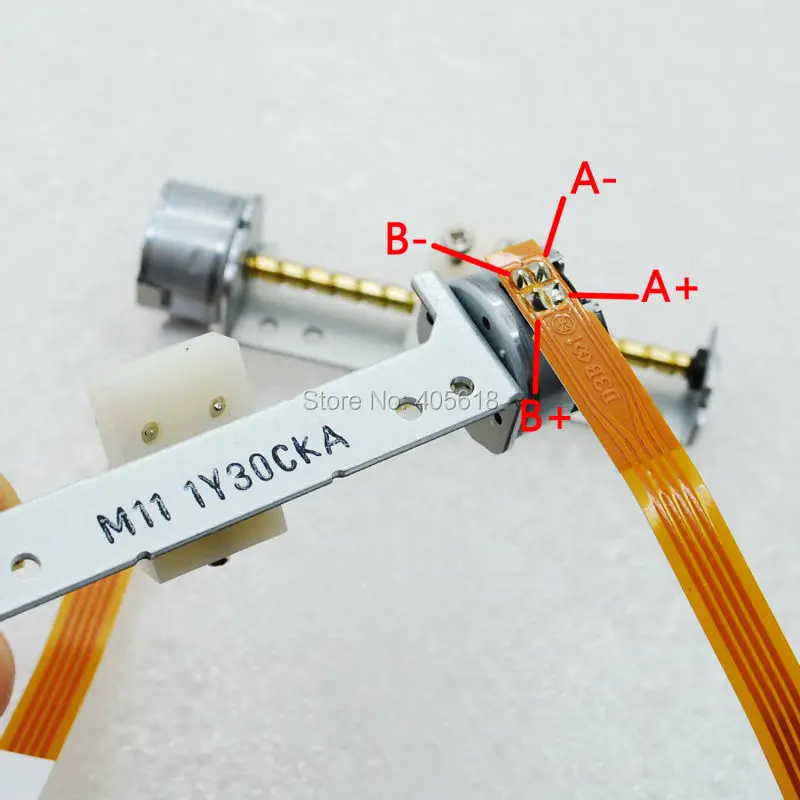
Прежде чем снимать дискету, я проверил, работает ли мотор на дискете. Я использовал 5 В от своего источника питания и проверил двигатель, все еще подключенный к цепи дискеты. Так и случилось. Я даже вычислил последовательность, необходимую для продвижения вперед. Итак, я снял его с цепи.
Проблема в том, что когда я снова попытался заставить его работать (на этот раз без флоппи-схемы), он не включился. И теперь, когда я подключаю 5 В к терминалам, которые работали раньше, на этот раз все, что я получаю, это короткое замыкание моего источника питания.
Есть мысли? у этого, вероятно, есть простое объяснение, но, поскольку я просто изучаю электронику как хобби, я еще мало о ней знаю.
- двигатель
- шаговый двигатель
- короткое замыкание
\$\конечная группа\$
3
\$\начало группы\$
Эти двигатели имеют один из подшипников вала на конце вала, а другой — внутри двигателя.![]() если вал не поддерживается снаружи двигателя, ротор заклинит.
если вал не поддерживается снаружи двигателя, ротор заклинит.
\$\конечная группа\$
1
\$\начало группы\$
Двигатели этого типа обычно имеют фазовое сопротивление 10~20 Ом. На 5В это будет потреблять 0,25-0,5А. Выдержит ли ваш блок питания такой ток? Если да, то измерьте сопротивление каждой фазы — если какое-либо из них намного ниже 10 Ом; тогда он, вероятно, закорочен. Также проверьте ленточный разъем на наличие перемычек припоя.
Двигатель может не вращаться должным образом, когда он находится вне рамы привода, потому что без подшипника на конце вала ничто не удерживает ротор на одной линии. Он может тереться о статор и, возможно, даже выдвигаться и заклинивать внутреннюю часть корпуса.
\$\конечная группа\$
6
\$\начало группы\$
Защитный диод Шоттки и конденсатор должны быть подключены параллельно двигателю (припаяны к контактам двигателя), как и любое реле или электродвигатель.