Содержание
В каких принтерах используется шаговый двигатель
Всем доброго времени суток! В х к этому обзору пообещал сделать обзор на свой 3D принтер c кинематикой CoreXY на шаговиках от матричного принтера. Кому интересно, прошу пожаловать под кат. Для начала немного предыстории появления данной поделки:
Года три назад достались мне забесплатно четыре комплекта шаговых двигателей от принтера Epson FX890. В нем используется два шаговых двигателя, нас интересует EM-336 (он же STP42D-221-03) от Shinano Kenshi. Валялись бы эти двигатели до второго пришествия, если бы здесь не появился обзор от земляка smirnov (за что ему большое спасибо).
Так вот, после прочтения руки зачесались, и в результате этой чесотки, года два назад, родилось поделие в виде Прюши i3 на акриловой раме, с боуден подачей и ATX блоком питания. Дабы не испугать читателей, размещу фото под спойлер.
Prusa i3
За бардак на столе прошу прощения, принтер собирался и стоит на работе После сборки и настройки прюши остались два шаговика, затем к ним добавилась еще пара и руки зачесались еще сильнее.
Однажды при чтении тудейки наткнулся на проект SmartCore и все встало на свои места — принтер для печати деталей был, опыт по сборке тоже, шаговики и кое какие запчасти — в наличии, ну и братья китайцы в помощь.
Размеры (В*Ш*Г) — 38*32*27 см (без крепления катушки) Механика: Кинематика — СoreXY Размеры области печати (X*Y*Z) — 124*130*105 мм Размеры направляющих осей X, Y — диаметр 6 мм, длина 200 мм Используются шпули GT2-20, ремень GT2 ширина 6 мм Ось Z — диаметр 8 мм, длина 220 мм, перемещается винтовой шпилькой М8. Экструдер — боудэн MK8 Хотэнд — китайский E3D V6, под 1,75 филамент.
Электроника:
Блок питания 12В 10 А (китайских) Arduino Mega 2560, RAMPS 1.4, MKS Mini 12864LCD Драйвера — 2*TMC2208 (ось X,Y), 2*A4988 (ось Z, экструдер) Концевики механические.
Софт:
прошивка — Marlin 1.1.5 слайсер — Simplify3D 4.0.1
Дополнительные фото
Для начала, требуется переделать шаговый двигатель EM-336 из униполярного в биполярный, снять установленную шпулю (мне брат на прессе выпрессовал, но можно и болгаркой попробовать). Корпус Для расчета корпуса и деталей под нужные комплектующие (толщина и длина валов, размеры области печати, способ перемещения оси Z — на винтовой шпильке или на ремне) идем на страницу проекта Smartcore на YouMagine, там описано какие комплектующие требуются и в разделе Documents скрипты для OpenJSCAD. Я использовал v.1.2 для расчета корпуса и деталей (кроме оси Z, т.к. в этой версии скрипта нет опции для расчета оси на шпильке) и v.1.0.2 для расчета деталей оси Z.(На данный момент на YouMagine что-то поломалось и скрипты не открываются. Для открытия можно сохранить скрипты на диск, зайти на openjscad.org и загрузить скрипт, сохраненный на диске). После расчета детали сохраняются в stl одним файлом и пришлось пересохранять требуемые детали в разные файлы. Размеры корпуса уже считал сам (для боковых стенок, там где находятся крепления оси Y, лучше прибавить пару сантиметров к расчетным), под свою компоновку, затем заказал распиловку с оклейкой кромок из МДФ толщиной 10 мм на рынке у торговцев кухнями.
Корпус Для расчета корпуса и деталей под нужные комплектующие (толщина и длина валов, размеры области печати, способ перемещения оси Z — на винтовой шпильке или на ремне) идем на страницу проекта Smartcore на YouMagine, там описано какие комплектующие требуются и в разделе Documents скрипты для OpenJSCAD. Я использовал v.1.2 для расчета корпуса и деталей (кроме оси Z, т.к. в этой версии скрипта нет опции для расчета оси на шпильке) и v.1.0.2 для расчета деталей оси Z.(На данный момент на YouMagine что-то поломалось и скрипты не открываются. Для открытия можно сохранить скрипты на диск, зайти на openjscad.org и загрузить скрипт, сохраненный на диске). После расчета детали сохраняются в stl одним файлом и пришлось пересохранять требуемые детали в разные файлы. Размеры корпуса уже считал сам (для боковых стенок, там где находятся крепления оси Y, лучше прибавить пару сантиметров к расчетным), под свою компоновку, затем заказал распиловку с оклейкой кромок из МДФ толщиной 10 мм на рынке у торговцев кухнями.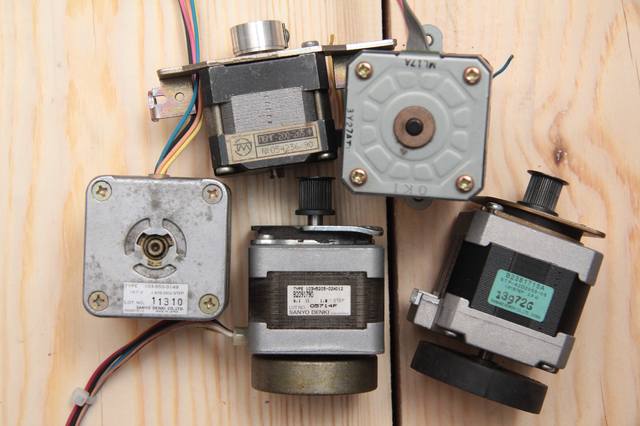 Очень удивился, когда забирал заказ — стоимость оказалась 5$, с учетом того, что акриловая рама с крепежом и шпильками мне стоила 40$. Затем сам резал необходимые отверстия и окна и собирал на саморезы. Для красоты напечатал белых заглушек и термоклеем приклеил на шляпки саморезов. О том откуда появилась куча круглых отверстий расскажу ниже.
Очень удивился, когда забирал заказ — стоимость оказалась 5$, с учетом того, что акриловая рама с крепежом и шпильками мне стоила 40$. Затем сам резал необходимые отверстия и окна и собирал на саморезы. Для красоты напечатал белых заглушек и термоклеем приклеил на шляпки саморезов. О том откуда появилась куча круглых отверстий расскажу ниже.
Оси XY
После сборки корпуса пришел черед печати деталей. Без переделки изначально напечатал 7 деталей — каретка, крепления направляющих оси X, дальние крепления направляющих оси Y и крепления шаговиков (они же передние крепления направляющих оси Y). Все детали печатал бестфиламентовским переходным PLA с заполнением 50 или 60%.
При сборке оси Y вылез косяк — при попытке закрепить в правом переднем креплении направляющую, треснуло посадочное место под нее.
Но с левой частью вышло еще хуже — при печати не учел одного важного факта — у принтерных шаговиков из корпуса торчит только 23 мм оси, и в силу конструкции левая шпуля находится выше чем правая, и получалось что с оригинальной деталью длины оси шаговика не хватает.
Сразу начал рассматривать варианты с разными костылями, но потом осенило — у меня же есть принтер, куча пластика и Thinkercad! В Thinkercad были проимпортированы оба крепления, в них было усилено посадочное место под направляющую, и в левом креплении был поднят двигатель на 12 мм вверх. Теперь после печати и установки все стало в соответствии с задуманной конструкцией.
Еще не совсем понял как в оригинале крепятся концевики, и в том же Thinkercad были спроектированы крепления для них.
Фото концевиков
концевик оси X концевик оси Y концевик оси Z
Лирическое отступление:
Вообще Thinkercad — это наше все! Пробовал в компасе проектировать — не зашло, в Fusion 360 дальше регистрации и установки клиента не продвинулся, OpenSCAD неплохая штука, если нужно параметры менять, но все это не то — все это надо было изучать. «Старый стал, ленивый» ©Белое солнце пустыни. Хотелось чего нибудь типа виндового Paint’а, только в 3D. И тут под руку попался Thinkercad! В нем если разобраться примитивами, сложением и вычитанием можно несложные детали проектировать, либо подправлять импортируемые.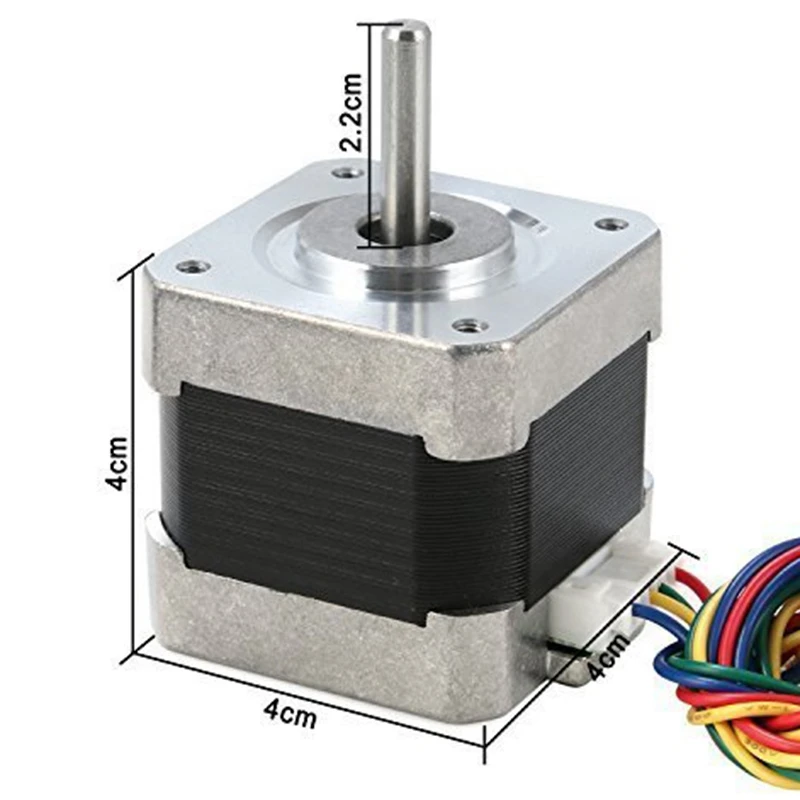 Единственно чего очень не хватает — это инструмента для снятия фасок — вручную часто муторно и лениво. Вообщем у кого нету времени, либо лень (как мне) рекомендую. Продолжим.
Единственно чего очень не хватает — это инструмента для снятия фасок — вручную часто муторно и лениво. Вообщем у кого нету времени, либо лень (как мне) рекомендую. Продолжим.
Хотэнд
Крепление хотэнда и его охлаждение из оригинального проекта мне не понравилось и я использовал крепление из этого проекта, но с некоторыми изменениями (обрезал крепление индукционного датчика и немного обрезал по краям, чтобы встало в каретку).
крепление хотэнда
печатать как на картинке, левую деталь с поддержками. Если левую деталь перевернуть по X на 90 градусов, в месте закладки гаек разорвало по слоям, несмотря на 100% заполнение. А так — 3 периметра и в путь. Охлаждение хотэнда Охлаждение использовал из этого проекта, только брал охлаждение для левого хотэнда, на своем повернул на 90 градусов. Как указывал в начале, хотэнд — китайский E3D V6, под 1,75 филамент, сопло на данный момент 0,4. Термобарьер проходной под 4 мм тефлоновую трубку до самого сопла. В свое время намучился с прюшей, сейчас только такие и использую. Для охлаждения хотэнда используется 3010 вентилятор, хватает, только шумные они (надо что получше, только с жабой договорится). Для охлаждения детали — турбинка 5015, но обдувает деталь только с одной стороны. В планах запилить радиальный обдув.
Для охлаждения хотэнда используется 3010 вентилятор, хватает, только шумные они (надо что получше, только с жабой договорится). Для охлаждения детали — турбинка 5015, но обдувает деталь только с одной стороны. В планах запилить радиальный обдув.
Каретка с хотэндом
Ось Z, стол Крепление направляющих оси Z и крепление стола взято с этого проекта, но опять же с изменениями, к тому же и этом проекте и в оригинальном, в верхнем креплении смещено посадочное место для подшипника. Так же после сборки оказалось, что линейные подшипники болтаются в своих посадочных местах, устранил с помощью ФУМ ленты. Стол сделал куска нержавейки 15*15 см, толщиной 1,5 мм. Калибровка стола выполняется по старинке, при помощи подкручивания винтов на углах стола и бумажки. Подогрева нет, печатаю PLA пластиком. Стол покрыт обычным 4 мм оконным стеклом, закрепленном канцелярскими зажимами.На стекле наклейка, подрезанная до нужных размеров. Куплена на Али в магазине Big Tree Tech и впечатления весьма противоречивые — сразу все клеилось нормально и снималось без усилий, но по мере использования снимать напечатанное стало все труднее (если присмотреться видно две глубокие царапины от шпателя), и первый слой нормально ложиться только если протереть спиртом.
Ось Z и стол
История происхождения отверстий в стенках После сборки и настройки, включил принтер и испугался — при перемещении по осям XY был такой звук, как если бы рядом стояли два пионера с барабанами и выбивали на них барабанную дробь. Что бы уменьшить данный эффект, взял коронки и насверлил отверстий, но эффект от такого апгрейда оказался минимальный. И проект был заброшен. Через некоторое время на тудейке прочитал статью о замене и использовании драйверов TMC2208. Драйвера были заказаны и через месяц ожидания установлены. После установке эффект поразительный — самый громкий узел — это тот самый вентилятор 3010. А прорезанные отверстия пришлось облагоражитвать, но зато есть за что держать при переноске 🙂
Электроника и прошивка
Стандартный набор начинающего конструктора — Arduino Mega 2560 + RAMPS 1.4. Ардуина со своим бзиком — на комплектном полуметровом USB кабеле с компом работает нормально. На более длинных уже все — вилы. Смена портов, USB 3. 0 — фиолетово, не работает и все.
0 — фиолетово, не работает и все.
Для графического отображения и работы с картой памяти, изначально хотел сделать на OLED, как в этой статье. Все купил, собрал, настроил, включил… и не взлетело 🙁 Изображение появляется на секунду и исчезает.
Почему так, понять не смог, а познаний в ардуиностроительстве маловато. Для исправления ситуации на Banggood заказал MKS Mini 12864LCD за 9$ (тогда еще купоны 5 от 10 за поинты работали, было время). При покупке учитывайте, что для RAMPS нужен адаптер.
С этим котроллером все пошло повеселее — все взлетело с первого раза.
Контроллер надо было как то красиво разместить — и опять взялмодель из этого проекта и творчески переработал 🙂 Про драйверы написано выше — 2*TMC2208 (ось X,Y), 2*A4988 (ось Z, экструдер). Драйвера настраивал на ток 0,7-0,8А. При настройке TMC2208, есть серьезный нюанс — настройка тока производится при отключенных двигателях! Когда менял A4988 на TMC2208, то в прошивке ничего не трогал, перемычки в RAMPS’е тоже не вынимал, только разъемы шаговиков перевернул (можно было ничего не трогать, тогда в прошивке надо было менять параметр INVERT_X_DIR, INVERT_Y_DIR, но в силу природной лени развернуть разъемы оказалось быстрее). И чуть не забыл, очень рекомендуется в меню принтера и сбросить настройки EEPROM. Поскольку печатаю PLA и нет подогрева стола, то запитано блоком питания на 10А, чего вполне достаточно. Дабы бутерброд из меги, рампса и драйверов меньше грелся, используется 8 сантиметровый вентилятор из старого блока питания (по моим подозрениям еще из АТ БП и лет ему под 30, но довольно таки тихий для своего возраста).
И чуть не забыл, очень рекомендуется в меню принтера и сбросить настройки EEPROM. Поскольку печатаю PLA и нет подогрева стола, то запитано блоком питания на 10А, чего вполне достаточно. Дабы бутерброд из меги, рампса и драйверов меньше грелся, используется 8 сантиметровый вентилятор из старого блока питания (по моим подозрениям еще из АТ БП и лет ему под 30, но довольно таки тихий для своего возраста).
Для управления всем добром используется Marlin 1.1.5 (на момент сборки это была актуальная версия). Прошивка была взята с marlinfw.org и настроена с нуля. Поскольку уже была собрана прюша и ремни, шпули и шпильки используются одинаковые, почти все основные параметры были взяты из прюшиной прошивки.
Поскольку используется кинематика CoreXY, чуть голову не поломал с этими параметрами:#define INVERT_X_DIR true
#define INVERT_Y_DIR true
#define INVERT_Z_DIR true
Брал их из прошивки оригинально проекта, подсматривал у других, переворачивал разъемы шаговиков и хоть ты тресни не двигалась каретка по осям XY так как надо — если по одной оси нормально, то по второй в инверсии. Но в конце концов нашел требуемую комбинацию и все заработало так как надо.
Но в конце концов нашел требуемую комбинацию и все заработало так как надо.
Если кому интересно — ссылка на Гуггл драйв с прошивкой.
Электроника и прошивка
Остался держатель катушки. Это квинтэссенция из двух проектов — крепление и держатель катушки. Поскольку я печатаю на балконе, а сам принтер хранится в комнате, то вышло очень практично и сильно уменьшает габариты при хранении.
Держатель катушки
Все печаталось PLA пластиком от Bestfilament, температура 210-215 гр., обдув после первого слоя.
bathtub boat (visual benchy) — сложная модель, наподобие 3DBenchy, мосты, арки, много мелких деталей, уменьшенная в 2 раза, печеталась без поддержек, заполнение 30%, слой 0.1
Еще фото лодки
- Marvin — еще одна тестовая модель, у меня их целый отряд 🙂
- Направляющие Д6мм, 200мм 4 шт. — 1,72$
Слой 0,2, заполнение 30% На всех фото где присутствует отверстия, закрытые заглушками желто-коричневого цвета напечатаны на этом же принтере — идеология RepRap в действии. И под спойлером пару моделек Остался шкурный вопрос — сколько это стоило? Вот сейчас и посчитаем Шаговые двигатели 4 шт. — мне бесплатно, если искать по барахолкам 2-3$, возьмем 10$ Драйверы ТМС2208 2 шт. — 12,32$ турбинка 5015 — 1,98$ вентилятор 3010 — 0,69$ Наклейка на стол — 5,12$ адаптер для RAMPS — 0,92$ MKS Mini 12864LCD — 12,70$ (мне обошлось в 9$) Mega 2560 R3 for arduino + 1pcs RAMPS 1.4 Controller + 4pcs A4988 Stepper Driver Module — 17,04$ 3D V6 Long distance J-head Hotend for 1.75mm 3D Bowden Extruder 0.4 Nozzle — 3,64$ MK8 extruder — 3,42$ LM6LUU 6mmx12mmx35mm 2 шт. — 1,34$ LM6UU 6mmx12mmx19mm 4 шт. — 1,2$ Направляющие Д6мм, 200мм 4 шт. — 1,72$ LM8UU 4 шт. — 1,08$ направляющие Д8мм, 240 мм 2 шт. — 0,94$ Подшипник 608ZZ 9 шт. — 1,8$ (ссылки не даю, брал на распродаже по 0,2$, качество г, нормальные от Минского завода по 1$)
И под спойлером пару моделек Остался шкурный вопрос — сколько это стоило? Вот сейчас и посчитаем Шаговые двигатели 4 шт. — мне бесплатно, если искать по барахолкам 2-3$, возьмем 10$ Драйверы ТМС2208 2 шт. — 12,32$ турбинка 5015 — 1,98$ вентилятор 3010 — 0,69$ Наклейка на стол — 5,12$ адаптер для RAMPS — 0,92$ MKS Mini 12864LCD — 12,70$ (мне обошлось в 9$) Mega 2560 R3 for arduino + 1pcs RAMPS 1.4 Controller + 4pcs A4988 Stepper Driver Module — 17,04$ 3D V6 Long distance J-head Hotend for 1.75mm 3D Bowden Extruder 0.4 Nozzle — 3,64$ MK8 extruder — 3,42$ LM6LUU 6mmx12mmx35mm 2 шт. — 1,34$ LM6UU 6mmx12mmx19mm 4 шт. — 1,2$ Направляющие Д6мм, 200мм 4 шт. — 1,72$ LM8UU 4 шт. — 1,08$ направляющие Д8мм, 240 мм 2 шт. — 0,94$ Подшипник 608ZZ 9 шт. — 1,8$ (ссылки не даю, брал на распродаже по 0,2$, качество г, нормальные от Минского завода по 1$)
Муфта 5mm*8mm*25mm — 0,93$
ремень GT2 6мм, 2м — 2,87$ Шпули GT2-20 2 шт. — 2,15$ концевики 3 шт. — 1,62$ Итого по запчастям ~85$ Корпус — 5$ PLA пластик — максимум на 10$
Поскольку в магазинах linkcnc Store, BIG TREE TECH и других платная доставка, а так же может какую мелочевку забыл указать, то добавим 15$.
Итого 115$ Так же прошу учесть, что вышеприведенные цены приблизительны, можно найти дешевле, направляющие можно изъять из старой техники, электронику купить в магазинах специализирующихся на этом. Все таки сделать подогрев стола — куплена силиконовая грелка на 220В 100Вт и твердотельное реле; Спроектировать и напечатать кабель-каналы и спрятать провода; На оси Z поменять шпильку М8 на трапецеидальный винт — куплен; Спроектировать радиальнй обдув печатаемой детали. Прикрутить Octoprint — уже есть, установлен на OrangePi Zero, осталось подать питание. За сим разрешите откланяться, Спасибо за внимание. С критикой, пожеланиями и вопросами — прошу в комментарии.
P.S. Все таки чукча читатель, а не писатель.
Небольшой гайд по выбору 3D-принтера для начинающих
Поводом для написания данной статьи послужила статья “Я хотел купить недорогой 3D-принтер, но посмотрел YouTube и расхотел”, в конце которой автор просит ответить на несколько вопросов. Попробую ответить с точки зрения своего семилетнего опыта 3D-моделера и 3D-печатника. Для начала небольшие предостережения.
Для начала небольшие предостережения.
- В данной статье не будет советов: “Покупайте принтер производителя Х — он хороший, а производителя Y — не берите ни в коем случае”, только общие рекомендации.
- Классификация принтеров неформальная, принятая в отечественном сегменте печатников.
- Все написанное основано на личном опыте автора и является его личным мнением.
- Если данные предостережения вас не пугают — добро пожаловать под кат.
Для начала представлюсь: меня зовут Максим и первый принтер я купил в далеком 2013 году. Это был китайский клон Makerbot 2 с веселым названием «Migce Cuble».
Фотография из личного архива
В рунете информации по 3D-печати почти не было, только одна тема на “Робофоруме” и несколько разрозненных статей про то, какая это крутая штука — 3D печать, так что для освоения приходилось много гуглить на английском, придумывать свои костыли и глубоко вникать в физику и технологию работы принтера.
Надо отдать должное, в англоязычном сегменте тогда шло активное освоение данной технологии и попадались интересные статьи типа “Подбор типа насечек подающей шестерни экструдера под конкретный тип пластика” или “Определение оптимальной температуры печати с помощью тензодатчика, установленного на экструдере”. С тех пор прошло 7 лет.
С тех пор прошло 7 лет.
Я успел освоить моделирование, собрать принтер с нуля, немного побыть модератором “3D Today”, поработать фриласером в области моделирования и печати, организовать кружок прототипирования для детей и вывести его на российский уровень. Из последних достижений: поволонтерствовал координатором по снабжению пластика в проекте “Мейкеры проти ковид”.
Многое поменялось за это время, в том числе и принтеры в моем домашнем зоопарке. Одно осталось неизменным — вопрос: “Что мне купить в качестве первого принтера?”.
В настоящее время в домашних условиях в основном используются два типа принтеров: печатающих по технологии FDM (FFF) — послойного наплавления пластика, подающегося в виде прутка и SLA (LCD) — печать фотоотверждающим полимером.
Технология FDM более распространена, из-за более низкой стоимости оборудования и расходников, но за последние годы цены на LCD принтеры и смолы для печати значительно снизились и фотополимерная печать по себестоимости и уровню вхождения почти сравнялась с FDM печатью.
SLA и FDM
Честно скажу, SLA-печатью я почти не занимался и LCD-принтера до сих пор нет в моем домашнем зоопарке (но скоро может появиться), поэтому речь пойдет в основном о FDM принтерах. Их можно разделить на 3 основных категории по типу механики:
Дрыгостолы — принтеры со столом, подвижным по горизонтали. Пожалуй самая распространенная модель принтера.
Отличается низкой себестоимостью комплектующих, простотой сборки и настройки, за что любима китайцами и печатниками.
К недостаткам относится сложность создания закрытого корпуса и печати тонких высоких деталей, которые начинает шатать по мере увеличения высоты, особенно если деталь печатается из гибкого пластика типа TPU.
Типичные дрыгостолы
Кубики — принтеры в которых стол ездит по вертикали. Себестоимость таких принтеров выше, также как и требования к прямоте рук при сборке и настройке. Но правильно сконструированный кубик обеспечивает более высокую скорость печати при сохранении ее качества.
При этом конструкцию принтера очень легко сделать закрытой, что позволяет печатать инженерными пластиками типа ABS и Nylon. Этот тип конструкции часто применяется в принтерах полупромышленного и промышленного класса.
Некоторые производители умудряются запихать дрыгостол в корпус кубика, но особых плюсов для печатников это не приносит.
Типичные кубики
Дельты — принтеры с, так называемой, дельта-кинематикой, когда печатающая головка, с помощью системы тяг крепится к кареткам, перемещающимся по вертикальным направляющим.
Себестоимость механики таких принтеров сравнима с себестоимостью дрыгостолов. Могут печатать на очень высоких скоростях.
Но очень требовательны к правильности выдерживания размеров, прямоте рук при сборке и настройке, и скорости работы “мозгов” из-за сложных математических расчетов траектории перемещения головки.
Категорически не рекомендуются в качестве первого принтера, хотя повсеместное применение датчика уровня стола несколько снижает требования к прямоте рук при настройке и работе.
Типичные дельты
По доступности на рынке тоже можно выделить 3 основных категории:
Китайцы (дешевые китайские принтеры) — почти всегда конструкторы, даже если приходят в собранном состоянии.
- К плюсам можно отнести низкую стоимость, широкую распространенность и унифицированность, что позволяет докупать вышедшие из строя детали в ближайшей радиобулошной или на известных китайских сайтах. Популярные модели собирают вокруг относительно большое количество пользователей, которое активно делится наработками в области самостоятельного ремонта и доработки данного типа принтеров. Самые ходовые модели, скорее всего будут печатать прямо “из коробки”, но потребуют доработок при более-менее долговременной эксплуатации.
- К минусам относятся качество комплектующих/сборки и необходимость доработки данных принтеров для получения приемлемого качества/скорости печати. Рекомендуется брать модели, уже сформировавшие вокруг себя большое сообщество. Это означает, что большинство недостатков уже выявлено и существуют типовые недорогие методы их решения.

КИТы (наборы для сборки в основном отечественного производства) — гуглятся по словам “ZAV”, “UlTi”, “Ультумбочка” и т.д. Обычно представляют собой набор для сборки фанерного кубика.
В последнее время появляются варианты с металлическими корпусами.
Поставляются в разных вариантах — начиная от комплекта для сборки корпуса с напечатанными деталями, заканчивая полностью готовыми собранными изделиями.
- К плюсам можно отнести достаточно хорошую инженерную проработку, возможность самому подобрать комплектующие для механической и электронной частей и сделать принтер полностью под свои требования. При хороших комплектующих обеспечивают быструю, стабильную и качественную печать. По цене выходят несколько дороже китайских принтеров, но дешевле полупрофессиональных принтеров отечественных или европейских/американских производителей.
- К минусам можно отнести приличные затраты времени на сборку и ожидание комплектующих, если вы решите сэкономить и самостоятельно заказать эти комплектующие у разных продавцов и собрать из них принтер. При сборке требуют прямых рук.
 При сборке требуют прямых рук.
При сборке требуют прямых рук.Заводские принтеры (полупрофессиональные принтеры отечественных или американских/европейских производителей). Моделей очень много, конструкции самые разные.
- Плюсом данного класса принтеров является печать с приемлемым качеством “из коробки”. В довесок вы получаете надежность в эксплуатации и гарантийную поддержку от производителя.
- Основной минус — цена. Часто непонятно от каких факторов зависит. Можно купить высококачественный принтер относительно занедорого, а можно задорого взять что-то непонятное. Второй минус — наличие специфических решений, несовместимых с популярными решениями на рынке: это могут быть сопла со своим шагом резьбы, особые вентиляторы, электроника, ремни и даже слайсеры. Некоторые требовательны к качеству пластика, встречаются модели, работающие только на чипированных катушках.
Теперь, когда мы определились с классификацией принтеров можно приступать к процедуре выбора принтера для себя, любимого.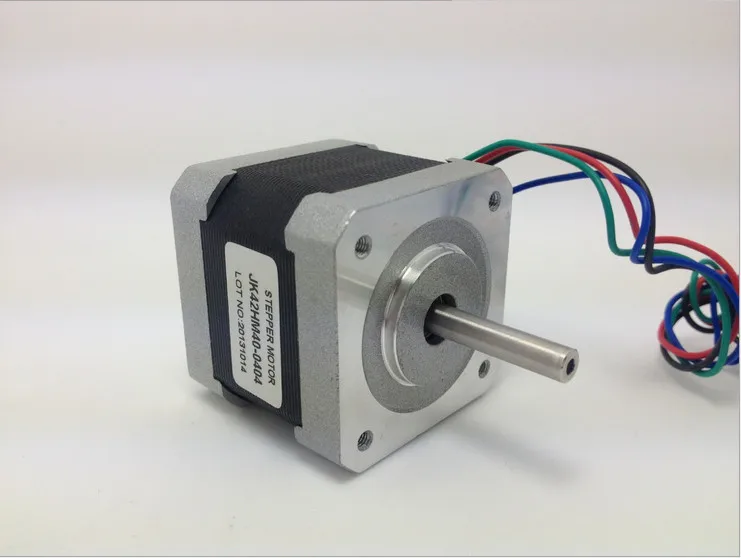 Если вы загорелись покупкой 3D-принтера — сначала определитесь для чего вы его собираетесь брать, от этого зависит тип и комплектация принтера. Разберем несколько типовых ситуаций:
Если вы загорелись покупкой 3D-принтера — сначала определитесь для чего вы его собираетесь брать, от этого зависит тип и комплектация принтера. Разберем несколько типовых ситуаций:
Хочу что-нибудь для себя и семьи делать — если не планируете печать изделий из инженерных пластиков, выдерживающих приличные нагрузки и температуры — хватит китайского дрыгостола или кубика.
При наличии бюджета и желании разобраться как работает принтер до начала, а не во время печати можно посмотреть в сторону отечественных наборов для сборки — с ними можно получить лучшее качество и безболезненно перейти на инженерные пластики.
Ничего не умею делать руками, но надо. Поэтому хочу принтер, который за меня все делать будет — в этом случае лучше смотреть на полупрофессиональные принтеры.
Если бюджета не хватает — можно посмотреть бывшие в употреблении или заказать сборку отечественного набора — обычно производители предлагают такую услугу через посредников.
При заказе сборки — смотрите на наличие опыта и положительных отзывов, бывают нюансы.
Хочу на продажу печатать — ферма из однотипных принтеров, в зависимости от бюджета. Если нет бюджета, но есть ресурсы на регулярную настройку/ремонт — можно даже из китайских дрыгостолов.
Дополнительно — принтер с большой областью печати, принтер с закрытым корпусом и нагреваемыми столом для печати инженерными пластиками, SLA/LCD-принтер для печати изделий с высокой степенью детализации.
По работе или дома возникает необходимость разработки и печати корпусов и деталей. Если планируются только прототипы небольшого размера — LCD-принтер, если функциональные изделия — закрытый кубик с возможностью печати инженерными пластиками.
Дети подрастают, а это технология будущего, хочу, чтобы освоили — посмотрите, какие принтеры используются на соревнованиях по прототипированию в вашем регионе. Возьмите такой-же. Можно бывший в употреблении.
Можно бывший в употреблении.
Хочу фигурки для настолок делать, мелочи красивые для дома — LCD-принтер.
Хочу разобраться, что за технология и как это вообще работает — набор для сборки отечественного производителя. Пока собирать будете — как раз разберетесь.
Денег вообще нет, но печатать хочется, буду сам с нуля собирать — получится лучше и дешевле китайцев. Как не странно нет. Стоимость комплектующих с али выйдет дороже принтера с али.
Конечно если есть станочный парк, умение им пользоваться, набор железа, валов и электроники валяющийся в углу мастерской, то может выгореть. Есть варианты построения принтеров из досок и мебельных направляющих, но качество печати у них, мягко говоря, хромает.
Например, постройка принтера, изображенного ниже, обошлась его автору по его словам в 80-90 долларов.
Если хотите полностью с нуля собрать свой принтер, то лучше отнеситесь к этому, как к отдельному хобби и смиритесь, что получится не сильно дешево.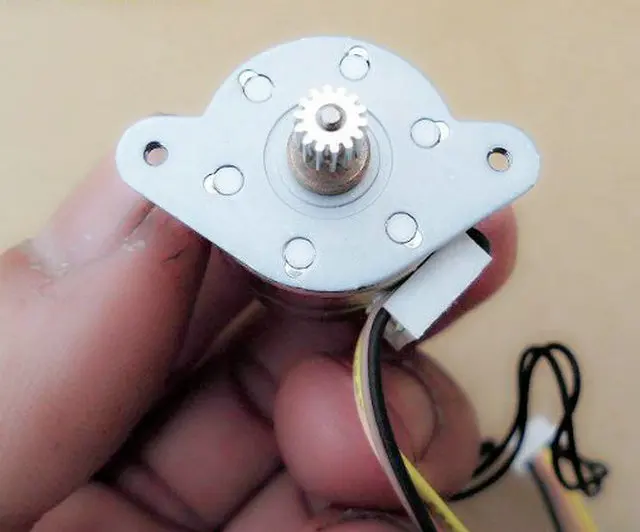 Ну или посмотрите в сторону бывших в употреблении принтеров.
Ну или посмотрите в сторону бывших в употреблении принтеров.
Вообще не знаю зачем мне принтер, но попробовать хочется — китаец или отечественный набор для сборки. Можно бывшие в употреблении. Если не зайдет — всегда можно перепродать.
С типом принтера определились — на что смотреть в первую очередь при покупке?
- Во первых — на жесткость конструкции — именно от нее зависят точность и скорость печати. Именно в направлении усиления жесткости будут направлены ваши первые доработки китайского принтера, так-как материал “сталь пластилин 3 (с)” для китайцев считается непозволительной роскошью. В случае покупки отечественных КИТов ситуация чуть получше.
- Во вторых — если принтер будет стоять в квартире — “бесшумные” драйвера для шаговых двигателей. 3D-печать процесс не быстрый и наличие постоянной достаточно громкой жужжалки под ухом надоедает.
- В третьих — наличие подогреваемого стола и простота доработки до корпуса закрытого типа. Со временем придет желание (необходимость) печатать ABS, а на открытом дрыгостоле это сделать проблематично.
- В четвертых — наличие хорошей системы обдува пластика тоже немаловажно.
- В пятых — при выборе принтеров с механикой CoreXY, H-Bot или Delta сильно желательно наличие 32-битной платы управления, или столкнетесь с замираниями (фризами) на высоких скоростях печати.
- В шестых, седьмых, и т.д — в конструкциях принтеров много нюансов. Если что-то непонятно — не стесняйтесь спросить у сообщества.
 Со временем придет желание (необходимость) печатать ABS, а на открытом дрыгостоле это сделать проблематично.
Со временем придет желание (необходимость) печатать ABS, а на открытом дрыгостоле это сделать проблематично. В любом случае, если собираетесь покупать или уже купили 3D-принтер — начинайте осваивать какой-нибудь 3D-редактор. Самый простой, на мой взгляд — https://www.tinkercad.com. Смоделировать в нем шайбочку или всем известную табличку перевертыш можно без особых усилий.
Со временем его возможностей перестанет хватать — тогда можно перейти на более серьезные САПР. На мой взгляд печатник должен владеть двумя типами редакторов — твердотельником для моделирования технических изделий (САПР) и полигональником (Blender и т. д.) — для моделирования художественных, но многие печатники считают это избыточным и осваивают, только один.
д.) — для моделирования художественных, но многие печатники считают это избыточным и осваивают, только один.
На этом пожалуй закруглюсь — статья и так вышла достаточно объемной, если есть вопросы — с удовольствием отвечу на них в х или в отдельной статье. Сразу говорю — на вопросы типа: “что лучше: летающий медведь 5 или ендер 3” отвечать не буду — на эту тему уже сломано немало копий на профильных ресурсах, смысла повторяться не вижу.
С уважением, Максим.
Как подобрать шаговый двигатель для станка ЧПУ. ШД из принтера
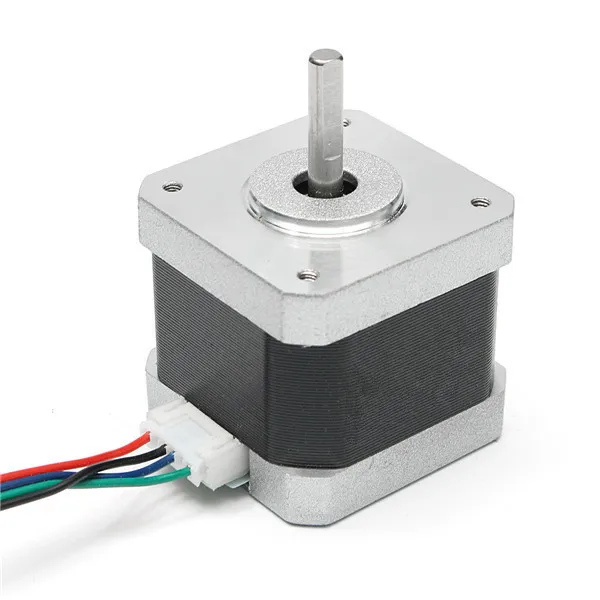
Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
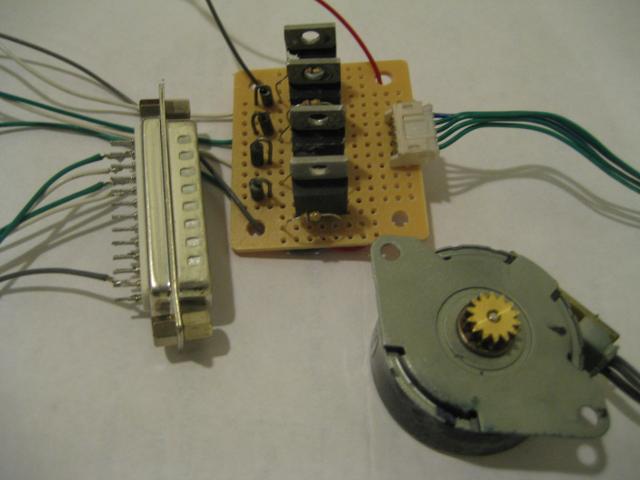
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
Если у двигателя 5 выводов, это униполярный шаговый двигатель . Вот так выгладит его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
В данном случае ШД имеет момент в 1. 4 раза больше. Момент более стабилен на низких частотах.
4 раза больше. Момент более стабилен на низких частотах.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
- Потребляемая мощность ШД — I*2 * R
- При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
- Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Iпосл.= I/ √2, т.е.
Iпосл.= 0.707 *I.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпосл. = 1.4 * T.
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.
Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно.
В итоге у нас получается биполярный двигатель с 4 выводами.
Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
Подключение А — шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент ↑1. 96 раза, момент более стабилен на высоких частотах (относительно А).
96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet.
Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet.
В таких случаях я пользуюсь вот такой таблицой.
| Сопротивление обмотки, Ом | Рабочее напряжение, В |
| 5-15 | 5 |
| 30-60 | 12 |
| 60-120 | 24 |
Не знаю на сколько данная таблица верная но у меня все сходиться и работает как надо.
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать СNC shield будем в следующей статье. Не пропустите!
Выбираем шаговый двигатель для 3D-принтера: особенности и назначение устройств
С появлением 3D-принтеров жизнь людей стала значительно проще. Устройства успешно используют во многих сферах — стоматологии, промышленности, ювелирном деле и медицине.
Сейчас 3D-принтер — не предмет роскоши, а вполне доступная по стоимости конструкция. Но все же есть те, кто решается на самостоятельное изготовление печатающих станков.
Далее поговорим о том, как выбрать шаговый двигатель для будущего 3D-принтера и какие особенности при этом стоит учесть.
Двигатель на 3D-принтере
В конструкции 3D-принтера основную функцию за движение экструдера по осям выполняют шаговые двигатели. Они имеют незначительный вес и большой крутящий момент.
Шаговый электродвигатель — это двигатель, не имеющий коллектора, у которого вращение производится не плавно, а дискретно (шагами).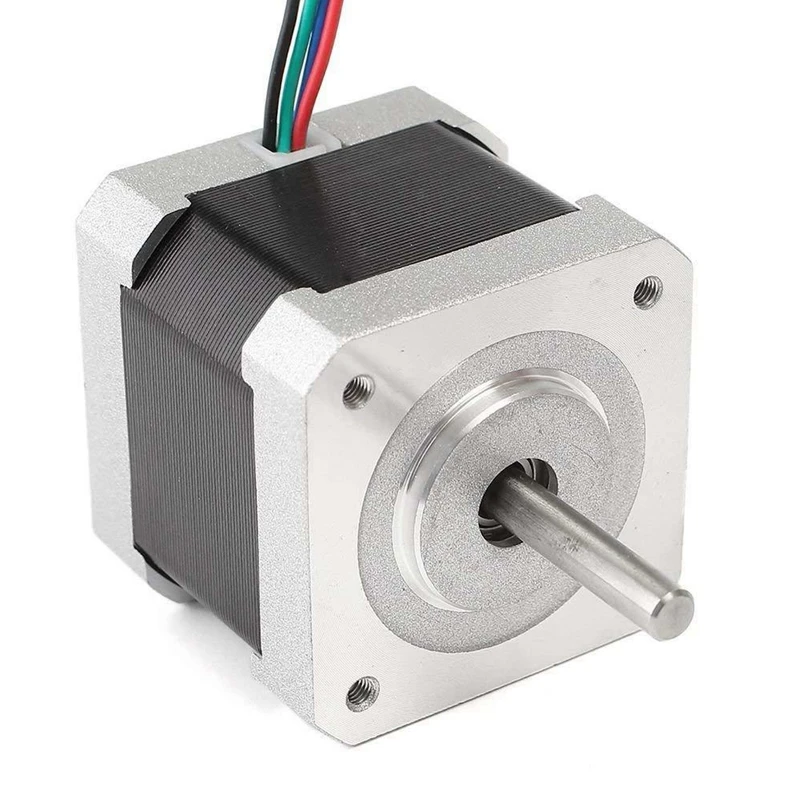 Задавая скорость и длительность импульсов, можно заставить устройство вращаться в определенном направлении. При этом есть возможность регулировать направление вращения и количество оборотов ротора.
Задавая скорость и длительность импульсов, можно заставить устройство вращаться в определенном направлении. При этом есть возможность регулировать направление вращения и количество оборотов ротора.
Если говорить о конструкции подобных устройств, то выделяют три основных вида:
- Двигатели с переменным магнитным сопротивлением — имеют несколько полюсов на статоре и ротор, изготовленный из мягкого материала, и 3 независимые друг от друга обмотки. Этот вид практически не используется.
- Двигатели с постоянным магнитным сопротивлением — в комплектацию входит статор и намагниченный ротор. Такие двигатели имеют от 24 до 48 шагов на один оборот.
- Устройства, сочетающие переменное и постоянное магнитное сопротивление (гибриды) — сочетание лучших свойств переменного и постоянного вращающего двигателя. Число шагов составляет от 100 до 400.
Гибридный двигатель — наиболее часто встречающаяся конструкция, которая, в свою очередь, делится на униполярный и биполярный тип.
Какие шаговые двигатели выбрать для 3D-принтера: лучшие варианты
При покупке вращающего устройства для 3D-принтера стоит обратить внимание на следующие параметры:
- размер вращающей конструкции;
- момент удержания — от 2,5–4 кг/см;
- номинальный ток — оптимальная версия на 1,7 А;
- вал — диаметр должен соответствовать конструктивным параметрам принтера.
Самые распространенные двигатели, которые устанавливают на конструкцию печатного устройства — биполярный с четырьмя выводами. Такие конструкции в случае поломки легко найти и заменить.
В 3D-принтерах устанавливаются вращающие моторы с маркировкой NEMA.
NEMA — Национальная ассоциация производителей электрооборудования, которая стандартизировала вращающие устройства по таким параметрам, как размер фланца и посадочные параметры. Такой стандарт позволяет разным производителям выпускать двигатели по определенным параметрам в зависимости от маркировки.
Самые востребованные модели в серии NEMA:
- NEMA 17 с фланцем 42 * 42 мм;
- NEMA 23 с фланцем 57 * 57 мм;
- NEMA 34 размером 86 * 86 мм.

Драйверы шаговых двигателей для 3D-принтера
Для управления двигателями в 3D-устройствах были разработаны драйверы, устанавливаемые в гнездо платы.
Драйверы бывают несколько типов:
- Постоянного напряжения — такие драйверы неэффективны и используются в изделии с малыми скоростями.
- Двухуровневые — подобные контроллеры поддерживают шаговые и полушаговые режимы. Они снижают нагрев двигателя и эффективны в работе.
- Драйверы с ШИМ — самые популярные, которые можно встретить на рынке. Они высокоинтеллектуальные и имеют множество дополнительных функций.
Также при выборе драйвера стоит обращать на следующие параметры:
- сила тока;
- напряжение питания;
- наличие опторазвязанных входов;
- наличие механизмов подавления резонанса;
- наличие протоколов, необходимых для работы двигателя;
- защита от скачков напряжения;
- микрошаговый режим;
- качество драйвера.
Собрать качественный 3D-принтер вполне реально, если следовать рекомендациям и внимательно изучить конструктивные устройства.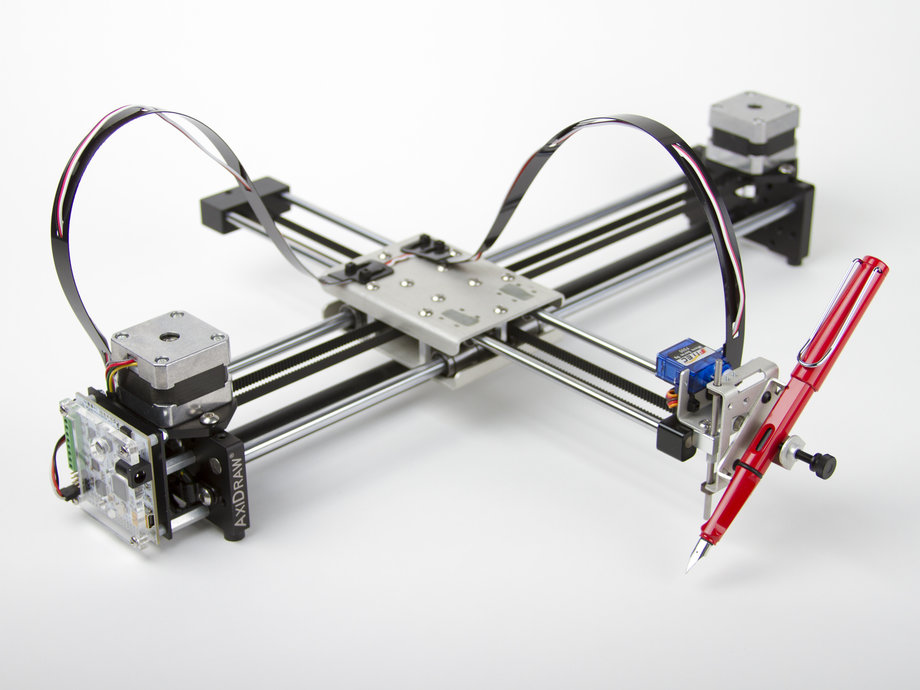 Вполне возможно, что такой печатный станок обойдется его владельцу дешевле. Но новичкам мы рекомендуем заказывать готовые 3D-устройства в специализированных магазинах. Так вы сможете освоить азы 3D-печати и ознакомиться с устройством принтера. Желаем удачи!
Вполне возможно, что такой печатный станок обойдется его владельцу дешевле. Но новичкам мы рекомендуем заказывать готовые 3D-устройства в специализированных магазинах. Так вы сможете освоить азы 3D-печати и ознакомиться с устройством принтера. Желаем удачи!
Шаговые двигатели для 3D принтеров
Шаговый двигатель Nema14 1.8° 34 мм
Артикул: Nema14-14HY0007-20
Крутящий момент 0.91 кг*см
Тип двигателя:гибридныйНоминальное напряжение:2.3 ВУгловой шаг:1.8°Номинальный ток/фаза:1.25 АСопротивление/фаза:1.86 Ом
В наличии
1 330 ₽
Шаговый двигатель Nema17 1.8° 40 мм
Артикул: Nema17-JK42HS40-1704
Крутящий момент 4 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:1.7 АСопротивление/фаза:1.65 ОмИндуктивность/фаза:3.2 мГн
В наличии
1 300 ₽
Шаговый двигатель Nema17 1.8° 60 мм
Артикул: Nema17-60mm-6kg
Крутящий момент 6 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:1.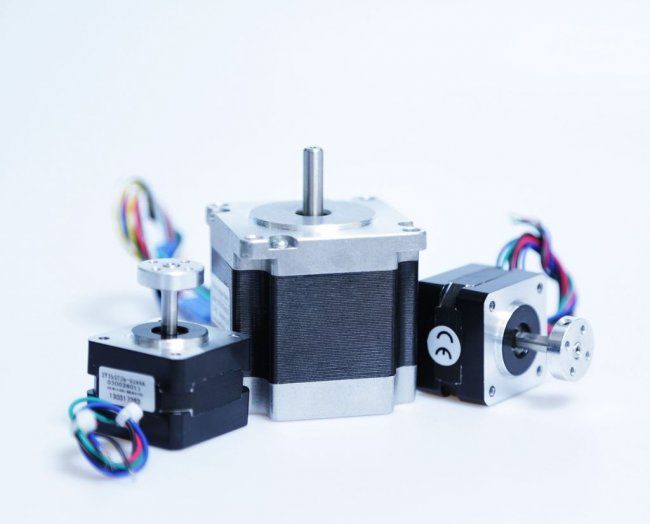 5 АУдерживающий момент:6.0 кг*смДлина корпуса:60 мм
5 АУдерживающий момент:6.0 кг*смДлина корпуса:60 мм
В наличии
2 520 ₽
Шаговый двигатель Nema23 1.8° 56 мм
Артикул: Nema23-56mm-12kg-6
Крутящий момент 12 кг*см
Тип двигателя:гибридныйНоминальное напряжение:3.3 BУгловой шаг:1.8°Номинальный ток/фаза:2.5 АСопротивление/фаза:1.6 Ом
В наличии
3 500 ₽
Шаговый двигатель с двумя валами Nema23 1.8° 50 мм
Артикул: Nema23-50mm-DS-8
С 2 валами, ток 1.0 А, крутящий момент 8.6 кг*см, вал 8 мм
Тип двигателя:гибридныйНоминальное напряжение:6.0 ВУгловой шаг:1.8°Номинальный ток/фаза:1.0 АСопротивление/фаза:6.0 Ом
В наличии
3 080 ₽
Шаговый двигатель Nema34 1.8° 150 мм
Артикул: Nema34-150mm-130kg
Крутящий момент 130 кг*см
Тип двигателя:гибридныйНоминальное напряжение:7.2 ВУгловой шаг:1.8°Номинальный ток/фаза:4 АСопротивление/фаза:1.0 Ом
В наличии
12 000 ₽
Демпфер для шагового двигателя NEMA 17
Артикул: MM-Anti-Vibro-NEMA17
В наличии
1 050 ₽
Радиатор охлаждения экструдера MK7/MK8, черный
Артикул: HeatSink-40x40x11-B
Радиатор охлаждения шагового двигателя NEMA 17
В наличии
Держатель для шагового двигателя NEMA 17
Артикул: RKP-MB42Al-Flat
Держатель алюминиевый для шагового двигателя 42 серии
В наличии
Держатель для шагового двигателя NEMA 17
Артикул: RKP-MB42A
Держатель алюминиевый для шагового двигателя 42 серии
В наличии
Шаговый двигатель Nema14 1.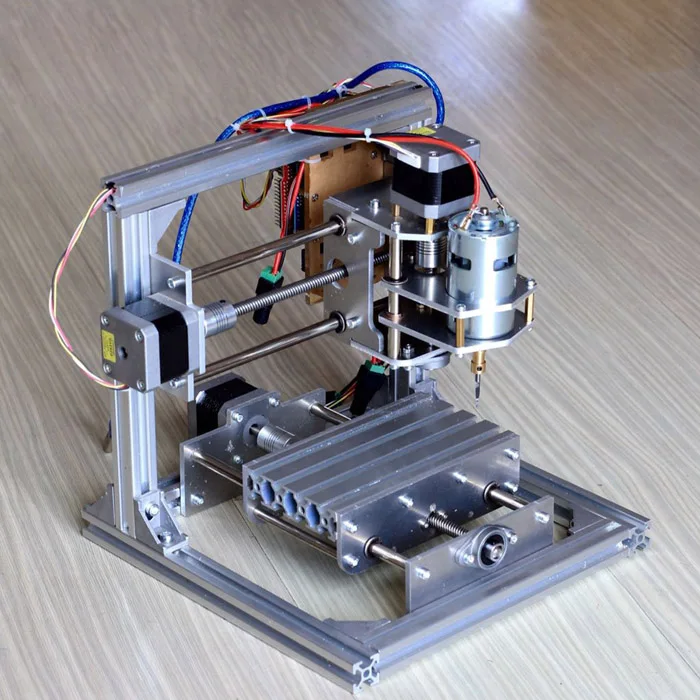 8° 34 мм
8° 34 мм
Артикул: Nema14-14HY3408
Крутящий момент 1.83 кг*см
Тип двигателя:гибридныйНоминальное напряжение:12 ВУгловой шаг:1.8°Номинальный ток/фаза:0.8 АСопротивление/фаза:6.5 Ом
Под заказ
Шаговый двигатель Nema16 1.8° 38 мм
Артикул: Nema16-FL39ST38-0504A
Крутящий момент 2.9 кг*см
Тип двигателя:гибридныйНоминальное напряжение:12 ВУгловой шаг:1.8°Номинальный ток/фаза:0.5 АСопротивление/фаза:24 Ом
Под заказ
Шаговый двигатель Nema17 1.8° 34 мм
Артикул: Nema17-17HS1011-20B
Крутящий момент 3.2 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:1.2 АСопротивление/фаза:3.2 ОмУдерживающий момент:3.2 кг*см
Под заказ
1 400 ₽
Шаговый двигатель Nema17 1.8° 40 мм
Артикул: Nema17-17HS4401S
Крутящий момент 4.2 кг*см
Тип двигателя:гибридныйНоминальное напряжение:3.6 ВУгловой шаг:1.8°Номинальный ток/фаза:1.5 АСопротивление/фаза:2.4 Ом
Под заказ
1 600 ₽
Шаговый двигатель Nema17 0. 9° 48 мм
9° 48 мм
Артикул: Nema17-17HD48002H-22B
Крутящий момент 4.4 кг*см
Тип двигателя:гибридныйУгловой шаг:0.9°Номинальный ток/фаза:1.68 АСопротивление/фаза:1.65 ОмИндуктивность/фаза:4.1 мГн
Под заказ
1 500 ₽
Шаговый двигатель с двумя валами Nema17 1.8° 40 мм
Артикул: Nema17-40mm-DS
С 2 валами, ток 1.5 А, крутящий момент 4.5 кг*см, вал 5 мм
Тип двигателя:гибридныйНоминальное напряжение:3.3 BУгловой шаг:1.8°Номинальный ток/фаза:1.5 АСопротивление/фаза:2.2 Ом
Под заказ
1 820 ₽
Шаговый двигатель с двумя валами Nema17 1.8° 60 мм
Артикул: Nema17-60mm-DS
С 2 валами, ток 1.5 А, крутящий момент 6 кг*см, вал 5 мм
Тип двигателя:гибридныйНоминальное напряжение:2.7 BУгловой шаг:1.8°Номинальный ток/фаза:1.5 АСопротивление/фаза:1.8 Ом
Под заказ
2 380 ₽
Шаговый двигатель Nema17 1.8° с винтом T8 295 мм и гайкой
Артикул: Nema17-42HS40-1004YAL
Система линейного перемещения в сборе.
Тип двигателя:гибридныйНоминальное напряжение:3.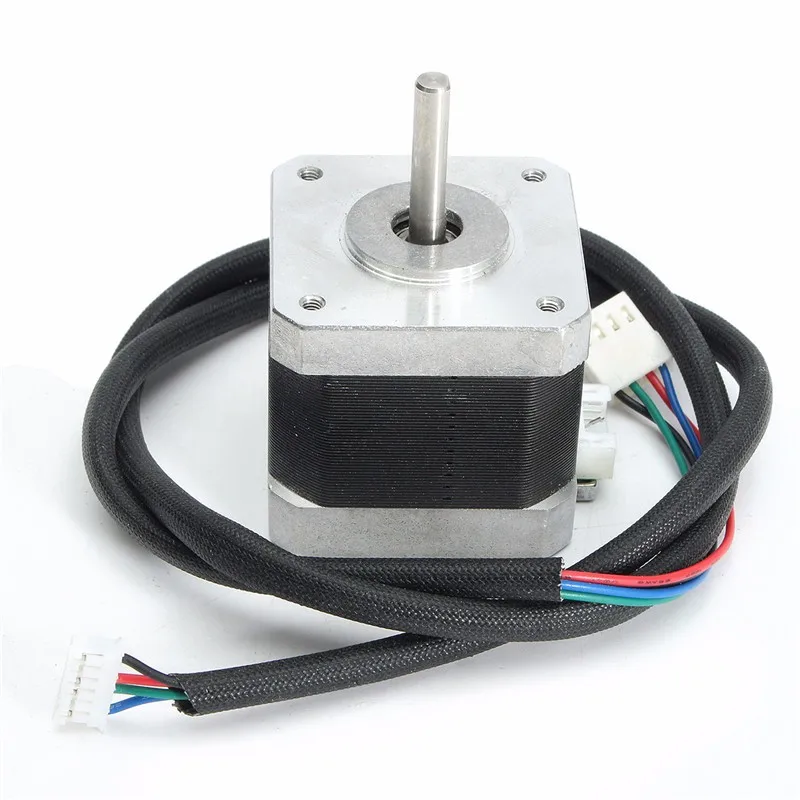 9 ВУгловой шаг:1.8°Номинальный ток/фаза:1.0 АСопротивление/фаза:3.9 Ом
9 ВУгловой шаг:1.8°Номинальный ток/фаза:1.0 АСопротивление/фаза:3.9 Ом
Под заказ
3 500 ₽
Шаговый двигатель с двумя валами Nema23 1.8° 76 мм
Артикул: Nema23-76mm-DS-8
С 2 валами, ток 2.5 А, крутящий момент 17.5 кг*см, вал 8 мм
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:2.5 АУдерживающий момент:17.5 кг*смДлина корпуса:76 мм
Под заказ
4 100 ₽
Радиатор охлаждения шагового двигателя NEMA 17
Артикул: HeatSink-40x40x11.3-B
Радиатор охлаждения 40 x 40 x 11.3 мм
Под заказ
Держатель для шагового двигателя NEMA 17
Артикул: RKP-MB42S-A
Держатель стальной для шагового двигателя 42 серии
Под заказ
Держатель для шагового двигателя NEMA 23
Артикул: RKP-MB57S
Держатель стальной для шагового двигателя 57 серии
Под заказ
(Есть решение) Почему бы не использовать высокооборотные шаговые двигатели с высоким микрошагом с редуктором в 3D-принтере?
diy-3d-printer
delta
microstepping
3D-принтер использует шаговые двигатели для перемещения печатающей головки и выдавливания филамента.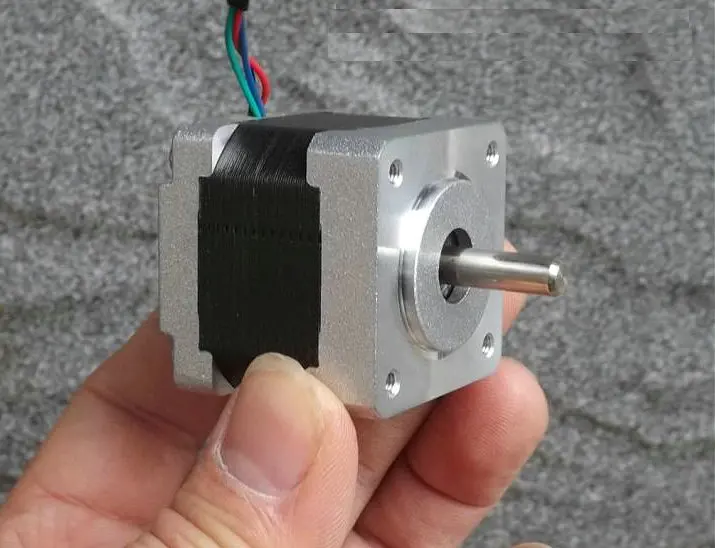 Они должны обладать хорошим крутящим моментом и разрешающей способностью.
Они должны обладать хорошим крутящим моментом и разрешающей способностью.
Микрошаг улучшает разрешение в 32 раза (я думаю), но чем выше ваш микрошаг, тем меньше крутящий момент.
Так что…
Почему бы не вращать двигатель с микроступенчатой передачей на высоких оборотах (что также уменьшает крутящий момент) и не увеличить крутящий момент за счет тяжелого редуктора с использованием червячной передачи?
Не будет ли движение печатающей головки еще более плавным, а небольшие ошибки в микрошагах и неравномерности передач не будут усреднены с использованием подхода с высокими оборотами и редуктором?
Действительно ли микрошаг действительно обеспечивает точное разделение шагов?
Можем ли мы обойтись более слабыми двигателями, потому что крутящий момент будет увеличен за счет уменьшения передачи?
Можем ли мы обойтись 48 шаговыми шаговыми двигателями вместо 200, потому что уменьшение передачи обеспечивает повышенное разрешение?
Существуют экструдеры, которые используют гибкий вал для поворота червячной передачи в прямом экструдере, в то время как двигатель установлен на раме, которая поворачивает гибкий вал (на ум приходит пикантный шустрый).
Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
 Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?Увеличение частоты вращения двигателя и использование редуктора должны сохранить точность и крутящий момент, позволяя использовать более слабые и легкие двигатели, что потенциально снижает детализацию движения. Я думал, что это более простой подход, и я хотел понять, что я потеряю в качестве компромисса. Я рассматривал большее трение при червячной передаче и износ, более высокий нагрев двигателя и т. Д. Но, может быть, это что-то вроде «не чини то, что не сломано». 3D-принтеры в наши дни не так уж дороги. Я просто хотел бы, чтобы они были еще дешевле.
@Mitesh Patel, 👍2
Обсуждение
3 ответа
Лучший ответ:
▲ 6
Чтобы ответить на каждый вопрос:
- Микрошаг улучшает разрешение в 32 раза (я думаю), но уменьшает крутящий момент, чем выше ваш микрошаг.

Крутящий момент не уменьшается за счет микрошагов. Уменьшение крутящего момента происходит только при движении на высоких оборотах. Сопротивление фазы двигателя должно соответствовать целевому значению оборотов в минуту (или скорости шага). Кроме того, микрошаг может достигать 1/256, и я лично использовал 1/128. Некоторые скажут, что все, что делает более высокий микрошаг,-это улучшает плавность, а не точность. Я лично протестировал 1/128 микрошагов по 17-дюймовой длинной оси. Мне удалось добиться точности и повторяемости с точностью до 5 микрон.
- Почему бы не вращать двигатель с микрошагом на высоких оборотах (что также снижает крутящий момент) и не увеличить крутящий момент за счет сильного редуктора с помощью червячной передачи?
Ответная реакция! Весь смысл шаговых двигателей в том, что они обеспечивают движение без люфта. Установка передачи между электромагнитным и концевым эффектором создаст люфт, который необходимо компенсировать во время движения. Современные системы ЧПУ учитывают это в своих профилях перемещения и включают автоматическую компенсацию люфта (например, Mach4).
Современные системы ЧПУ учитывают это в своих профилях перемещения и включают автоматическую компенсацию люфта (например, Mach4).
- Не будет ли движение печатающей головки еще более плавным, а небольшие ошибки в микрошагах и неравномерности передач не будут усреднены с использованием подхода с высокими оборотами и редуктором?
Он уже достаточно плавный с 1/64 — м или большим микрошагом. Экструзионное сопло опускается только до 2 мм.
- Действительно ли микрошаг действительно обеспечивает точное разделение шагов?
Да. Да, это так.
- Можем ли мы обойтись более слабыми двигателями, потому что крутящий момент будет увеличен за счет уменьшения передачи?
Нет, потому что это просто остановится.
- Можем ли мы обойтись 48 шаговыми шаговыми двигателями вместо 200, потому что уменьшение передачи обеспечивает повышенное разрешение?
Помимо того факта, что никто не делает 48 шагов за оборот двигателей, использование редуктора было бы нелогичным. В настоящее время существует 400 двигателей с шагом на оборот, которые фактически повышают точность без каких-либо потерь крутящего момента.
В настоящее время существует 400 двигателей с шагом на оборот, которые фактически повышают точность без каких-либо потерь крутящего момента.
- Существуют экструдеры, которые используют гибкий вал для поворота червячной передачи в прямом экструдере, в то время как двигатель установлен на раме, которая поворачивает гибкий вал (на ум приходит пикантный шустрый). Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Крутящий момент! Если бы они использовали небольшой двигатель для привода экструдера, им пришлось бы компенсировать потерю крутящего момента более высокой мощностью (т. е. напряжением). Это приведет к проблемам с охлаждением этого двигателя.
Суть в том, что если вы правильно определяете размеры двигателей и проектируете систему, то трансмиссия не нужна. Если вам нужен больший крутящий момент, приобретайте двигатели большего размера. Если портал должен быть легким, используйте механизм delta или corexy.
,
@user77232
▲ 2
Есть старое правило, которое гласит: «Если вопрос начинается с» Почему они этого не делают», ответ, скорее всего, будет «деньги»».
В данном случае речь идет о стоимости червячных передач. Правильно сопрягаемые червячные передачи намного дороже в изготовлении, чем обычные цилиндрические шестерни. Это, вероятно, объясняет большую часть этого-не говоря уже о том, что 200 шаговых двигателей, которые мы видим на большинстве принтеров FDM, являются очень распространенным товаром, и чем больше вы что-то делаете, тем меньше стоит каждый из них.
Кроме того, вы не можете управлять большинством червячных передач с обратной передачей (особенно с высоким передаточным числом). Это не повлияло бы на экструдер (или не повлияло бы? Я видел много чего за ручки ходить на экструдере вала двигателя), но если я не могу вернуться-вожу X или Y оси, я был бы очень раздражен (использования ручного управления движением в прошивку все, как стол откатка) .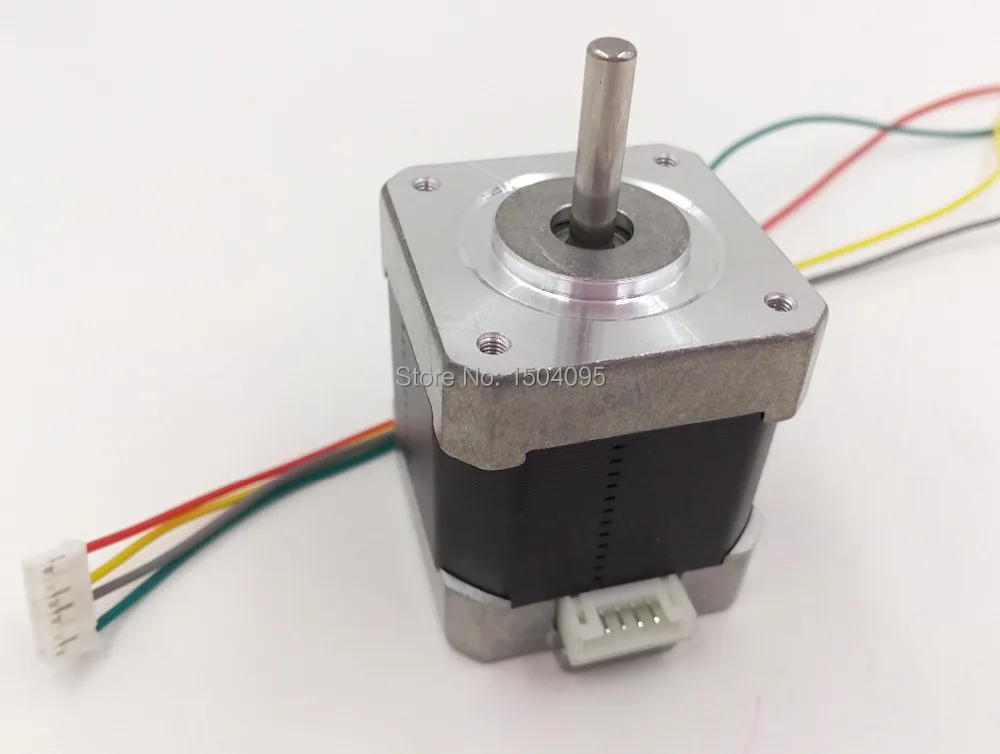 .. даже ходового винта по оси Z может быть обратно-управляемый без излишних усилий.
.. даже ходового винта по оси Z может быть обратно-управляемый без излишних усилий.
Итак, итог: то, что у нас есть сейчас, работает достаточно хорошо, и сделать его (может быть, совсем немного) лучше будет стоить дороже, чем то, что мы получим. ИМО.
,
@Zeiss Ikon
▲ 2
- Существуют экструдеры, которые используют гибкий вал для поворота червячной передачи в прямом экструдере, в то время как двигатель установлен на раме, которая поворачивает гибкий вал (на ум приходит пикантный шустрый). Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Flex3Drive, из которого якобы был клонирован Zesty, допускает использование очень маленького двигателя NEMA-8, непосредственно соединенного с червячной передачей вместо гибкого вала. Это по-прежнему добавляет значительное (с точки зрения машин, стремящихся к ускорению 40 м/с2 и тому подобное) количество массы к инструментальной головке, и мне неясно, какая скорость/ускорение по оси E достижима при уменьшении 40:1 и таком маломощном двигателе.
А большего степперы обычно используется в 3D-принтеры вполне способны правдоподобное е-осевой скоростью или ускорением, что вам хотелось бы без передачи или с незначительными потерями (например, 2:1 или 3:1), Как только вы встаете с червячной передачей уровень отношений, это вопрос свойств конкретного мотора, можно ли получить достаточную скорость для приемлемого втягивание производительности или даже нормально печатать движения на очень высоких скоростях. Например, у меня есть Flex3Drive G5, и оригинальный электронный шаговый двигатель NEMA-17 от моего Ender 3 плохо работает с ним без дополнительной передачи со стороны двигателя вала. Однако «шаговый двигатель с высокой частотой вращения», как вы предлагаете, должен прекрасно справляться с червячным редуктором.
Итак, есть ли какая-то причина для этого? Если вы передаете силу таким образом, что не можете справиться с высоким крутящим моментом, например, с гибким валом, да. В противном случае-нет. Как уже говорили другие, современные микрошаги до смешного точны.
,
@R.. GitHub STOP HELPING ICE
Разборка струйного принтера
Разборка струйного принтера
В процессе сборки моего ленточно-шлифовального станка 1″x42″
и выставочный дисплей pantorouter, который я израсходовал
большая часть 8-мм валов у меня была. Такие струйные принтеры HP
все-в-одном — хороший источник, поэтому я разобрал этот. Я нашел его на обочине
год назад, полагая, что я мог бы все еще использовать его, если бы нашел адаптер питания, чтобы пойти с ним.
Каждый раз, когда я разбираю старый принтер, я всегда поражаюсь его механической изобретательности.
внутри, так что я решил, что стоит написать об этом.
Часть сканера находится сверху принтера. Разбивая его,
Я держу целых кишок сканера. это разноцветный
Светодиодная лента, сенсорная лента и небольшой двигатель постоянного тока с зубчатой передачей для привода.
его вдоль зубчатого колеса в нижней части корпуса сканера. Сканеры раньше
куда более сложные дела, с шаговыми двигателями, причудливой оптикой с зеркалами,
и полированные валы для скольжения.
Неудивительно, что сканеры стали такими дешевыми.
В прошлый раз, когда я хотел купить принтер, я купил принтер/сканер, потому что это было
самый дешевый вариант!
Кнопки в верхней части не имеют явных пружин, только кусочки пластика, которые гнутся, когда
их толкают.
Пластиковый корпус образует ванну вокруг механизма принтера.
Электроника — это всего лишь маленькая плата в углу.
Никаких видимых силовых транзисторов или силовых ИС. Я думаю, что маленькие двигатели постоянного тока
использование этого принтера более эффективно, чем используемые принтеры с шаговыми двигателями
в использовании, поэтому меньше необходимости в силовой электронике.
Я отрезал пластиковую ванну ленточной пилой, чтобы было легче смотреть
у механизма.
Здесь вы можете видеть полированный 8-миллиметровый вал, по которому скользит печатающая головка,
ремень ГРМ, приводящий его в движение (мой палец давит на него), и
прозрачная пластиковая лента с очень тонкими черными полосами для определения местоположения
ощущение.
Крупный план пластиковой полоски с тонкими черными полосами, примерно
шесть на миллиметр. Полоса
туго натягивается по ходу печатающей головки. оптический
датчик на печатающей головке считывает полосу. Используя квадратурное кодирование,
принтер точно знает, как далеко и в каком направлении
печатающая головка сдвинулась.
Это позволяет принтеру устанавливать положение печатающей головки очень точно.
высокая повторяемость, точнее, чем при использовании шагового двигателя и синхронизации
пояс. Это необходимо для двунаправленной передачи с высоким разрешением.
печать.
Двигатель, приводящий в движение печатающую головку, очень маленький.
Двигатель постоянного тока. Двигатели постоянного тока быстрее и эффективнее,
но позиционная обратная связь необходима для достижения точного управления. Но
обратная связь по положению уже необходима для печатающей головки, поэтому может
также используйте его для управления двигателем постоянного тока.
Извлечен полированный стальной стержень диаметром 8 мм. Печатающая головка скользит по этому
Печатающая головка скользит по этому
стержень. Это основное «вкусно», за которым я охотился.
На правом конце принтера находится плевательница.
Принтер перемещает печатающую головку с этой стороны и запускает форсунки на полную мощность.
власть очистить их. Войлочные подушечки внизу собирают чернила.
Также имеется швабра, которая может перемещаться по печатающим головкам.
чтобы помочь очистить их.
С левой стороны принтера находятся две резиновые прокладки, которые поднимаются, когда
печатающая головка упирается в штифт. Эти прокладки закрывают принтер
картриджи, когда печатающая головка припаркована, чтобы предотвратить их высыхание
вне.
Слева мотор и редуктор механизма подачи бумаги.
Крайняя левая белая шестеренка на фото имеет прозрачный диск с очень
прекрасный набор линий вокруг него. Оптический энкодер (на коричневой цепи
плата внизу) определяет точное движение подачи бумаги,
подобно тому, как определяется положение печатающей головки.
Двигатель подачи бумаги также представляет собой небольшой двигатель постоянного тока.
Я ломал голову над тем, что активирует механизм скребка справа. Я обнаружил
как это работало после того, как я сломал его. Есть небольшая шестеренка (A), которая активирует скребок,
и это подтянуто куском пластика (B), который я сломал. Этот пластик был
часть узла на конце подающего ролика. Когда печатающая головка перемещается полностью
вправо, он поворачивает этот механизм, что заставляет часть B поднимать шестерню A.
чтобы зацепить его с шестерней на ролике подачи. Таким образом, двигатель подачи бумаги приводится в действие
швабры. Это означает, что ракель можно использовать только между листами бумаги.
В механизме подачи бумаги много шестерен, и они, я думаю, включаются при
двигатель подачи бумаги назад.
Я оставил двигатель подачи бумаги, ремень и шкив прикрепленными к их части шасси и
отрежьте это ножницами по металлу. Может когда-нибудь пригодится для чего-нибудь.
Вот кусочки, которые я сохранил. Основная подача бумаги тоже на валу 8 мм (бонус),
в то время как другие ролики на валах 6 мм. Я израсходовал большую часть своего 6-миллиметрового вала, когда
У меня появилось много подписчиков для моего пантороутера,
так что было приятно пополнить и этот запас.
А вот барахло, которое я не сохранил. Немного расточительно, но весь принтер пришел из
мусор, так что моя утилизация по-прежнему была чистым сокращением мусора.
Деревянный корпус компьютера
Антенна Wi-Fi
Бустерная тарелка
Ремонт пластиковых деталей
Управляемый компьютером шаблон
для коробчатого соединения
Самодельный настольный блок питания
Обзор самого дешевого USB-прицела, который я смог найти в Интернете (только видео)
Малиновый Пи
подставка для компьютера
Ошибка ремонта ленточной пилы
Смазка шумного шопвака
Двигатель посудомоечной машины с мокрым ротором
Другие технические материалы
Уборка дров с бордюра, замедленная съемка
На мой сайт по деревообработке.
Шаговые двигатели для 3D-принтеров
Подкатегории
Показано 1-10 из 10 позиций
Фильтр по
Бренд
Марка
ОЕМ
Цена
Цена
 ",",",";","%","-","+","E","\u00d7","\u2030","\u221e","NaN"],"currencyCode":"EUR","currencySymbol":"\u20ac","positivePattern":"\u00a4#,##0.00","negativePattern":"-\u00a4#,##0.00","maxFractionDigits":2,"minFractionDigits":2,"groupingUsed":true,"primaryGroupSize":3,"secondaryGroupSize":3}» data-slider-encoded-url=»https://solectroshop.com/en/129-stepper-motors-for-3d-printers»>
",",",";","%","-","+","E","\u00d7","\u2030","\u221e","NaN"],"currencyCode":"EUR","currencySymbol":"\u20ac","positivePattern":"\u00a4#,##0.00","negativePattern":"-\u00a4#,##0.00","maxFractionDigits":2,"minFractionDigits":2,"groupingUsed":true,"primaryGroupSize":3,"secondaryGroupSize":3}» data-slider-encoded-url=»https://solectroshop.com/en/129-stepper-motors-for-3d-printers»>€0,00 — €15,00
Ссылка
I0065
Ссылка
I0020
Ссылка
I0126
Ссылка
I0098
Ссылка
I0117
Ссылка
I0168
Ссылка
I0044
Ссылка
I0116
Ссылка
I0177
Ссылка
I0038
Вернуться к вершине
Активные фильтры
Вернуться к началу
Зачем использовать шаговые двигатели
Шаговые двигатели обладают множеством преимуществ, которые делают их идеальными для использования в 3D-принтерах и станках с ЧПУ. Во-первых, они позволяют контролировать положение — благодаря контроллеру мы можем точно определить положение ротора, в которое мы хотим попасть, и угол, под которым ротор будет находиться в конце цикла. Кроме того, таким же образом мы можем контролировать скорость двигателя (на этот раз благодаря регулятору скорости). Еще одним аспектом шаговых двигателей является способность оставаться фиксированным в одном положении, что позволяет использовать такие приложения, как удержание манипулятора в одном положении или держать дверь открытой. И последнее, но не менее важное: шаговые двигатели очень мощные на низких скоростях. Удельную мощность каждого двигателя смотрите в подробном описании, но у нас есть диапазон от 1,22 кг/см до 28,5 кг/см.
Во-первых, они позволяют контролировать положение — благодаря контроллеру мы можем точно определить положение ротора, в которое мы хотим попасть, и угол, под которым ротор будет находиться в конце цикла. Кроме того, таким же образом мы можем контролировать скорость двигателя (на этот раз благодаря регулятору скорости). Еще одним аспектом шаговых двигателей является способность оставаться фиксированным в одном положении, что позволяет использовать такие приложения, как удержание манипулятора в одном положении или держать дверь открытой. И последнее, но не менее важное: шаговые двигатели очень мощные на низких скоростях. Удельную мощность каждого двигателя смотрите в подробном описании, но у нас есть диапазон от 1,22 кг/см до 28,5 кг/см.
Ключевые параметры при выборе шагового двигателя
Во-первых, есть два больших типа шаговых двигателей — униполярные и биполярные. По сути, униполяры легче программировать, а биполяры дешевле, однако требуют более сложных драйверов (драйвер должен контролировать не только катушку, на которую он подает питание, но и то, как она должна намагничиваться, поскольку катушки могут менять поляры). Другими ключевыми характеристиками шаговых двигателей являются количество шагов за цикл и угол за шаг (стандартно соответственно 200 и 1,8 градуса). Наконец, есть размеры двигателей, и они определяются единым стандартом NEMA (Национальная ассоциация производителей электрооборудования) — в нашем предложении у нас есть NEMA 17 и NEMA 23, что в значительной степени означает размер передней части двигателя ( 17 — 1,7 дюйма на 1,7 дюйма, 23 — 2,3 дюйма на 2,3 дюйма).
Другими ключевыми характеристиками шаговых двигателей являются количество шагов за цикл и угол за шаг (стандартно соответственно 200 и 1,8 градуса). Наконец, есть размеры двигателей, и они определяются единым стандартом NEMA (Национальная ассоциация производителей электрооборудования) — в нашем предложении у нас есть NEMA 17 и NEMA 23, что в значительной степени означает размер передней части двигателя ( 17 — 1,7 дюйма на 1,7 дюйма, 23 — 2,3 дюйма на 2,3 дюйма).
Прочие аксессуары
Для работы всех шаговых двигателей требуется драйвер. Для униполярных драйверов наиболее частым драйвером является ULN2803, очень простой по своим функциям, но удовлетворяющий всем несложным униполярным потребностям. С биполярами дело обстоит немного сложнее, чем с самим мотором — драйверы здесь могут управлять мощностью, микрошагами и обычно те же, что используются в 3D-принтерах. Здесь наиболее популярными будут A4988 или DRV8825. Проверьте нашу категорию драйверов для двигателей, чтобы узнать больше. Еще одна деталь, которая может вам понадобиться, — это опора для сборки — мы предлагаем стандарты NEMA 17 и NEMA 23.
Еще одна деталь, которая может вам понадобиться, — это опора для сборки — мы предлагаем стандарты NEMA 17 и NEMA 23.
Что такое шаговые двигатели и как они работают?
3D Insider поддерживается рекламой и зарабатывает деньги за клики, комиссионные от продаж и другими способами.
Всякий раз, когда мы говорим о дронах или 3D-принтерах, в разговоре всегда упоминается термин «шаговый двигатель». В конце концов, он обеспечивает фундаментальный механизм как для экструдера, так и для движущейся печатающей головки 3D-принтеров, а также для пропеллеров дронов. Если мы сможем понять шаговые двигатели и то, как они работают, мы сможем глубже понять, как работают дроны и 3D-принтеры.
Что такое шаговые двигатели и чем они отличаются от обычных двигателей? Как они работают и что делает их идеальными для компонентов 3D-принтеров и дронов?
Что такое шаговый двигатель?
Шаговый двигатель представляет собой бесщеточный синхронный электродвигатель постоянного тока, который делит свой полный оборот на несколько шагов равной величины.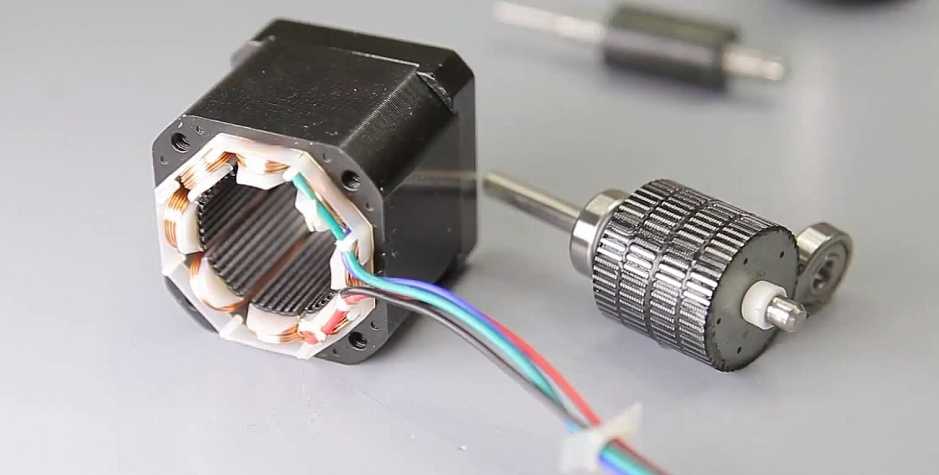 Как и в обычном бесщеточном двигателе, шаговый двигатель имеет центральный ротор и внешний статор. Бесконтактный характер бесщеточного двигателя делает его менее подверженным износу, что снижает потребность в частом техническом обслуживании.
Как и в обычном бесщеточном двигателе, шаговый двигатель имеет центральный ротор и внешний статор. Бесконтактный характер бесщеточного двигателя делает его менее подверженным износу, что снижает потребность в частом техническом обслуживании.
Вращение стандартного бесщеточного двигателя возможно благодаря наличию электрических катушек вокруг статора. Через эту катушку проходит электрический ток, создавая таким образом магнитное поле, заставляющее ротор вращаться вдоль оси якоря. Это вращение завершает преобразование электрической энергии в механическую и приводит в движение шестерни, которые можно найти во многих распространенных устройствах, включая дроны и 3D-принтеры.
Наличие нескольких электрических катушек вокруг статора отвечает за создание дискретных «ступенчатых» характеристик шагового двигателя. Для управления скоростью вращения шагового двигателя на статор посылаются цифровые импульсы вместо одного аналогового напряжения. Регулируя частоту этих импульсов или ограничивая их количество, скорость вращения и положение шагового двигателя можно контролировать с большой точностью.
Как работает шаговый двигатель?
Характеристика управления шаговыми двигателями обеспечивается наличием ряда электрических катушек – в некоторых случаях до 200. Каждая катушка расположена на равных частях статора, что позволяет якорю вращаться на фиксированный угол для каждого электрического импульса. Для 200-ступенчатого двигателя каждый шаг создает двигатель, эквивалентный всего лишь 1,8 градусам.
Чтобы инициировать вращение шагового двигателя, на одну из электрических катушек подается одиночный электрический импульс. Это вращает ротор на заданную частоту, приближая его к следующему электромагниту. Затем подача тока на первый магнит отключается и передается на следующий магнит. Это повторяет процесс, обеспечивая дальнейшее вращение ротора. Каждый импульс преобразуется в один «шаг», что позволяет использовать целочисленный механизм управления двигателем.
Для старых шаговых двигателей поведение цифрового импульса может быть описано квадратичной функцией. Однако более современные примеры имеют импульсы, которые следуют синусоидальной волновой функции. Последний обеспечивает более тихую и эффективную работу двигателя, но требует использования более сложных и дорогих регуляторов скорости.
Однако более современные примеры имеют импульсы, которые следуют синусоидальной волновой функции. Последний обеспечивает более тихую и эффективную работу двигателя, но требует использования более сложных и дорогих регуляторов скорости.
Различные типы шаговых двигателей
В настоящее время существует большое разнообразие шаговых двигателей. Помимо различных размеров (выраженных в NEMA) и количества шагов, производительность шагового двигателя также может варьироваться в зависимости от конструкции ротора и обмотки катушек электромагнитов.
В соответствии с конструкцией ротора
1. Двигатель с постоянными магнитами
Простейший тип шагового двигателя, двигатель с постоянными магнитами, имеет базовый цилиндрический ротор, который постоянно намагничен. Из-за природы магнитов окружность ротора имеет чередующиеся магнитные полярности. Это создает больший крутящий момент при том же электрическом входе. Однако наличие чередующихся полярностей также означает, что ротор будет естественным образом сопротивляться изменениям своего положения, даже когда электромагнитная катушка находится под напряжением. Это значительно снижает скорость вращения двигателя с постоянными магнитами.
Это значительно снижает скорость вращения двигателя с постоянными магнитами.
2. Двигатель с переменным сопротивлением
В двигателе с переменным сопротивлением ротор с постоянными магнитами был заменен железным, форма которого специально соответствует магнитному полю, создаваемому электромагнитами в статоре. Без фиксирующего момента двигатель с переменным сопротивлением может вращаться на гораздо более высоких скоростях. Однако крутящий момент, который он обеспечивает, также намного ниже. Таким образом, выбор между двигателями с постоянными магнитами и двигателями с переменным сопротивлением — это вопрос скорости, а не мощности.
3. Гибридный синхронный двигатель
Гибридный синхронный двигатель сочетает в себе характеристики двух предыдущих типов роторов — ротор с постоянными магнитами, форма которого может совпадать с направлением магнитного поля, создаваемого электромагнитами. Это означает, что он также обладает всеми преимуществами двух других типов роторов, включая сочетание высокой скорости и высокого крутящего момента. Недостатком гибридного двигателя является то, что ротор требует очень сложной конструкции, что делает его значительно дороже.
Недостатком гибридного двигателя является то, что ротор требует очень сложной конструкции, что делает его значительно дороже.
Униполярные и биполярные двигатели
1. Униполярный двигатель
В униполярном двигателе обмотка катушки на каждой фазе снабжена центральным отводом. Этот общий провод позволяет подавать ток на любой конец катушки, создавая таким образом возможность изменения направления магнитного поля, создаваемого каждым электромагнитом. Конструкция приводит к гораздо более простой схеме, а также обеспечивает точное управление угловым вращением ротора. Недостатком этого подхода является то, что только половина катушек в каждом электромагните всегда находится под напряжением в любой точке, что также снижает напряженность магнитного поля. Это приводит к менее эффективному преобразованию электрической энергии в механическую.
2. Биполярный двигатель
В биполярном двигателе обмотка каждого электромагнита имеет только две клеммы. Поскольку шаговому двигателю по-прежнему необходимо сохранять способность реверсировать свое вращение, по-прежнему необходим механизм изменения направления тока на каждом из электромагнитов. Это достигается построением Н-моста – довольно сложной схемы, позволяющей переключать направление тока. Хотя схема привода биполярного двигателя очень сложна, она создает двигатель, который использует максимальный крутящий момент, который может быть создан на каждой электромагнитной катушке.
Это достигается построением Н-моста – довольно сложной схемы, позволяющей переключать направление тока. Хотя схема привода биполярного двигателя очень сложна, она создает двигатель, который использует максимальный крутящий момент, который может быть создан на каждой электромагнитной катушке.
Преимущества и недостатки шаговых двигателей
Шаговые двигатели особенно подходят для приложений, требующих точного управления двигателем. Они также универсальны — шаговые двигатели можно найти в крошечном экструдере 3D-принтера до промышленных станков с ЧПУ. Однако не во всех ситуациях требуются шаговые двигатели. Вот некоторые плюсы и минусы шаговых двигателей, которые можно использовать для оценки их правильного использования.
PROS
Точное позиционирование
Благодаря использованию электрических импульсов шаговые двигатели могут обеспечивать высокоточное угловое позиционирование. Это делает их идеальными для приложений, использующих двигатели для позиционирования, например, для станков с ЧПУ.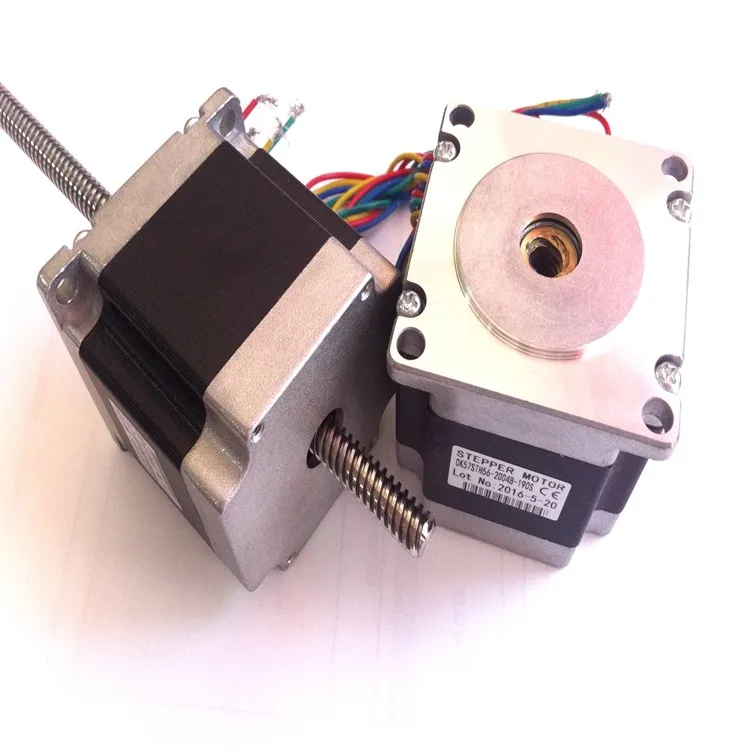 Как только соответствующее количество электрических импульсов было передано на элемент статора двигателя, он обычно имеет очень хорошую реакцию на остановку. Точность шаговых двигателей обычно находится в диапазоне от 3% до 5%.
Как только соответствующее количество электрических импульсов было передано на элемент статора двигателя, он обычно имеет очень хорошую реакцию на остановку. Точность шаговых двигателей обычно находится в диапазоне от 3% до 5%.
Низкие эксплуатационные расходы и высокая надежность
Основное преимущество бесщеточного двигателя заключается в том, что ротор и статор вращаются относительно друг друга с высокой скоростью без необходимости соприкосновения. Это позволяет избежать проблемы ускоренного износа более устаревших (но более дешевых) коллекторных двигателей. Большинство отраслей промышленности начали переходить на бесщеточные двигатели, потому что они значительно сокращают потребность в обслуживании и дорогостоящие простои.
Переменная скорость вращения
Шаговые двигатели невероятно универсальны. Просто изменяя частоту электрических импульсов, посылаемых на электромагниты, можно изменять скорость вращения шагового двигателя почти на гранулярном уровне. Некоторые шаговые двигатели также предназначены для вращения в любом направлении. Хорошим примером этого являются шестерни экструдера FDM-принтера, которые могут как экструдировать, так и втягивать нить.
Некоторые шаговые двигатели также предназначены для вращения в любом направлении. Хорошим примером этого являются шестерни экструдера FDM-принтера, которые могут как экструдировать, так и втягивать нить.
ПРОТИВ
Низкий крутящий момент и высокий уровень шума
Чтобы создать движение, шаговый двигатель должен пройти через несколько форм преобразования энергии. Электрический ток создает магнитное поле, которое затем приводит во вращение вал для создания механической энергии. Поскольку преобразование энергии никогда не бывает совершенным, часть мощности теряется на каждом этапе либо в виде отработанного тепла, либо в виде трения. Это означает, что шаговые двигатели имеют более низкое отношение выходного крутящего момента к входной мощности по сравнению с другими двигателями.
Несмотря на то, что шаговый двигатель может показаться плавным, на самом деле он выполняет непрерывный цикл остановки и запуска в масштабе, который нам не очевиден.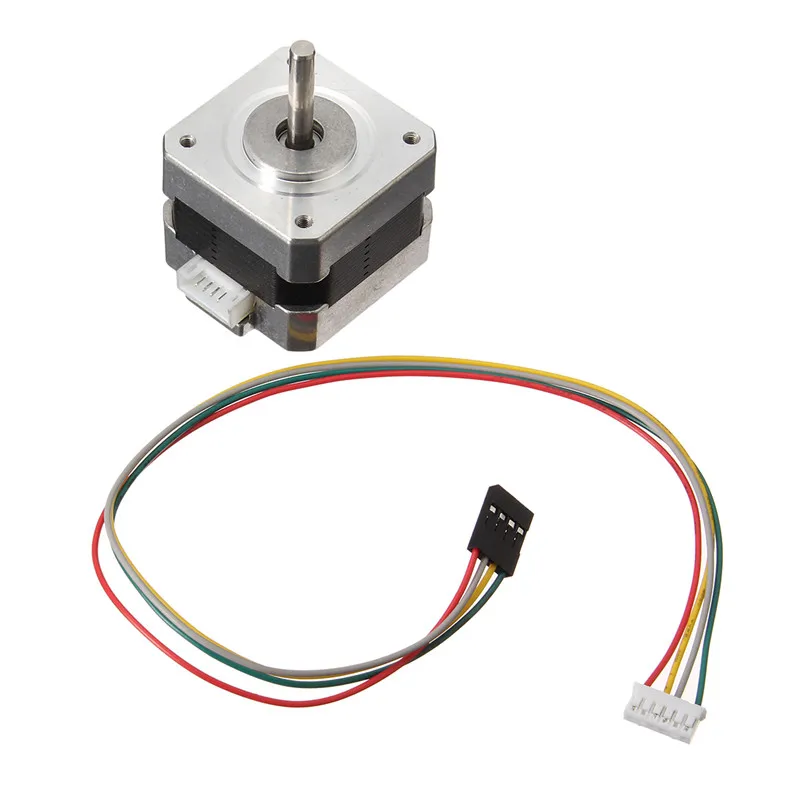 Помимо присущей такой схеме неэффективности, она еще и создает много шума. Это одна из причин, почему беспилотники, как известно, очень шумные.
Помимо присущей такой схеме неэффективности, она еще и создает много шума. Это одна из причин, почему беспилотники, как известно, очень шумные.
Потребляет ток даже в стационарном состоянии
Для создания магнитного поля электромагнитом требуется непрерывный ток в обмотке. Следствием этого является то, что шаговый двигатель будет продолжать потреблять ток, даже если все, что ему нужно сделать, это удерживать ротор в неподвижном положении. В противном случае ротор будет свободно вращаться. Очевидно, что это влияет на общую эффективность шагового двигателя для операций с большим количеством простоев.
Заключительные мысли
Шаговые двигатели стали очень полезными во многих современных коммерческих продуктах и промышленных приложениях. Помимо их ценности с точки зрения контроля и универсальности, шаговые двигатели еще более впечатляют тем, что в их невероятно компактной конструкции реализована плотность технологий. Хотя шаговые двигатели несовершенны, они стали стандартным оборудованием в различных условиях.