Содержание
Шаговые двигатели
Шаговые двигатели представляют собой бесщеточные двигатели с очень большим числом полюсов, 100 полюсов или 50 пар полюсов. Шаговые двигатели считаются недорогой простой системой управления движением, в которой 100-полюсный двигатель может вращать ротор в 200 уникальных положениях (шагах) за один оборот вала двигателя. В сочетании с контроллером с простым пошаговым вводом и вводом направления шаговые двигатели являются очень простыми компонентами управления движением, которые часто используются в недорогих системах управления движением. Традиционные системы шаговых двигателей работают в режиме «разомкнутого контура», где предполагается, что вращение вала двигателя происходит, учитывая количество шагов, предоставляемых приводу двигателя. Это приводит к «чрезмерной настройке» выходного крутящего момента (по существу, размера двигателя), чтобы гарантировать, что двигатель не заблокирован или не вращает полное количество входных шагов.
С добавлением энкодера (абсолютного или инкрементного) к хвостовому валу шагового двигателя можно проверить вращение вала двигателя. Использование датчика с шаговым двигателем приводит к созданию системы управления движением, которая называется «двигайся и проверяй». В этом случае шаговый двигатель больше не нужно увеличивать в размерах, чтобы двигатель вращался на нужное количество шагов. На основании информации о положении датчика обратной связи система может распознать, выполнил ли двигатель требуемое количество шагов или нет. Это приводит к более эффективной системе управления движением с точки зрения энергопотребления и физических размеров.
Использование датчика с шаговым двигателем приводит к созданию системы управления движением, которая называется «двигайся и проверяй». В этом случае шаговый двигатель больше не нужно увеличивать в размерах, чтобы двигатель вращался на нужное количество шагов. На основании информации о положении датчика обратной связи система может распознать, выполнил ли двигатель требуемое количество шагов или нет. Это приводит к более эффективной системе управления движением с точки зрения энергопотребления и физических размеров.
В последнее время шаговые двигатели применяются как бесщеточные двигатели постоянного тока, BLDC, двигатели с большим числом полюсов (100 полюсов). Работа шагового двигателя в этом режиме (шаговый сервопривод) обеспечивает более низкую стоимость сервомоторной системы благодаря более низкой стоимости шагового двигателя по сравнению с серводвигателем, но с более низкой производительностью, чем традиционные сервосистемы BLDC. Шаговые двигатели предназначены для удержания крутящего момента в первую очередь, а частота вращения, об / мин, является вторичной.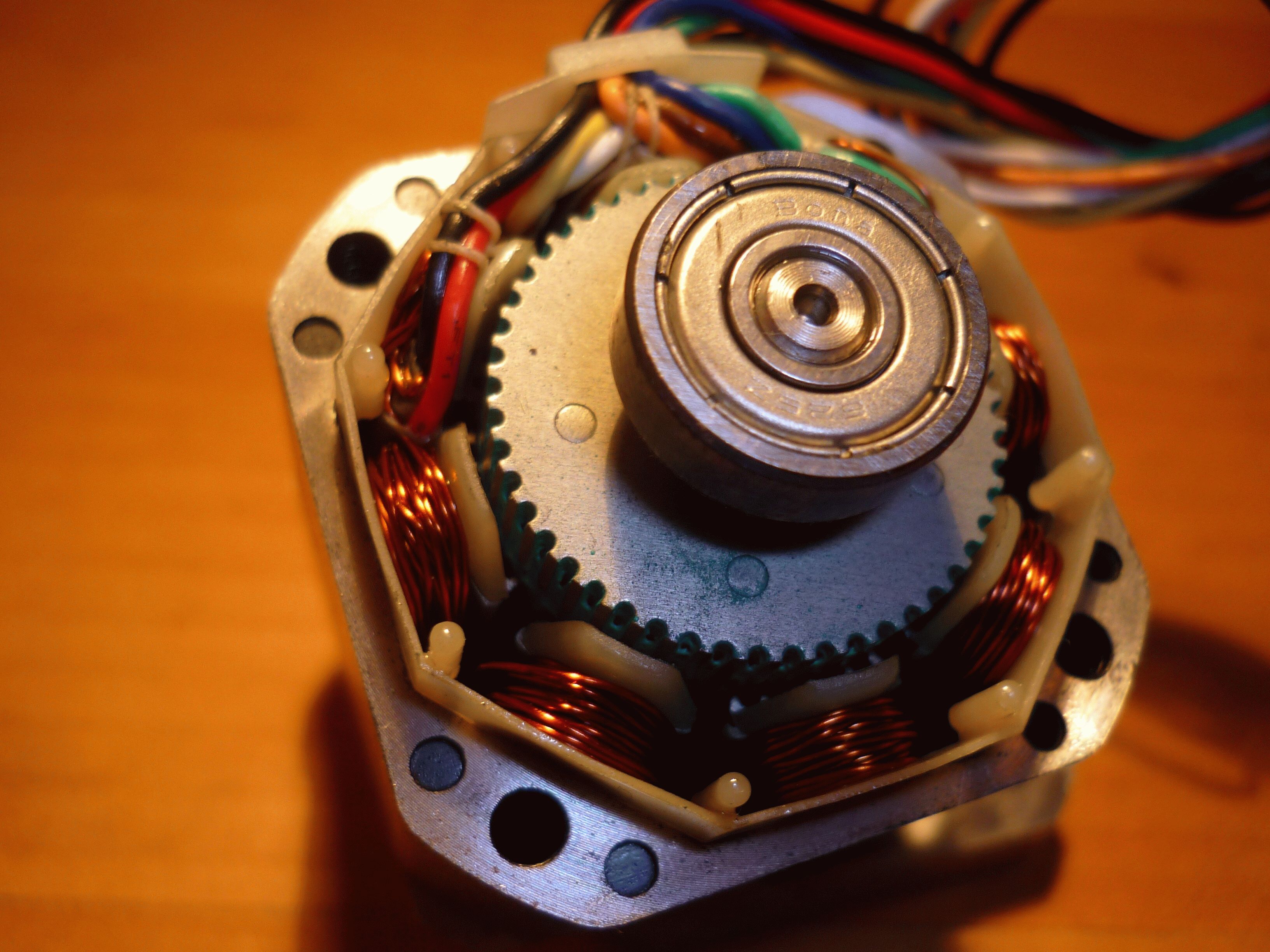
Для достижения высокого удерживающего момента шаговые двигатели имеют множество обмоток, которые создают сильные магнитные поля. Но с увеличением числа обмоток увеличивается ЭДС, которая снижает скорость вращения вала двигателя на единицу напряжения. Для шаговых серводвигателей всегда требуется обратная связь с энкодером, чтобы электроника привода могла переключать фазные токи двигателя в нужное время, чтобы вал двигателя вращался контролируемым образом. Преимущество использования шагового двигателя в качестве серводвигателя заключается в том, что при управлении по замкнутому контуру величина тока, поступающего на двигатель, пропорциональна нагрузке на двигатель. Слабый ток требуется без нагрузки, в то время как высокая нагрузка требует большого тока двигателя. Это в отличие от шагового двигателя, работающего в режиме разомкнутого контура, в котором двигатель всегда работает с максимальным током независимо от нагрузки на двигатель.
Многооборотные энкодеры POSITAL являются очень экономичным и компактным вариантом для модернизации шаговых двигателей до усовершенствованных шаговых сервосистем. Они используют технологию Wiegand в качестве системы сбора энергии и охватывают большое количество оборотов, как это требуется, например, в приложениях с линейным приводом.
Они используют технологию Wiegand в качестве системы сбора энергии и охватывают большое количество оборотов, как это требуется, например, в приложениях с линейным приводом.
POSITAL Kit Encoder на шаговом двигателе
Лекция № 8 — Как работают шаговые двигатели
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя.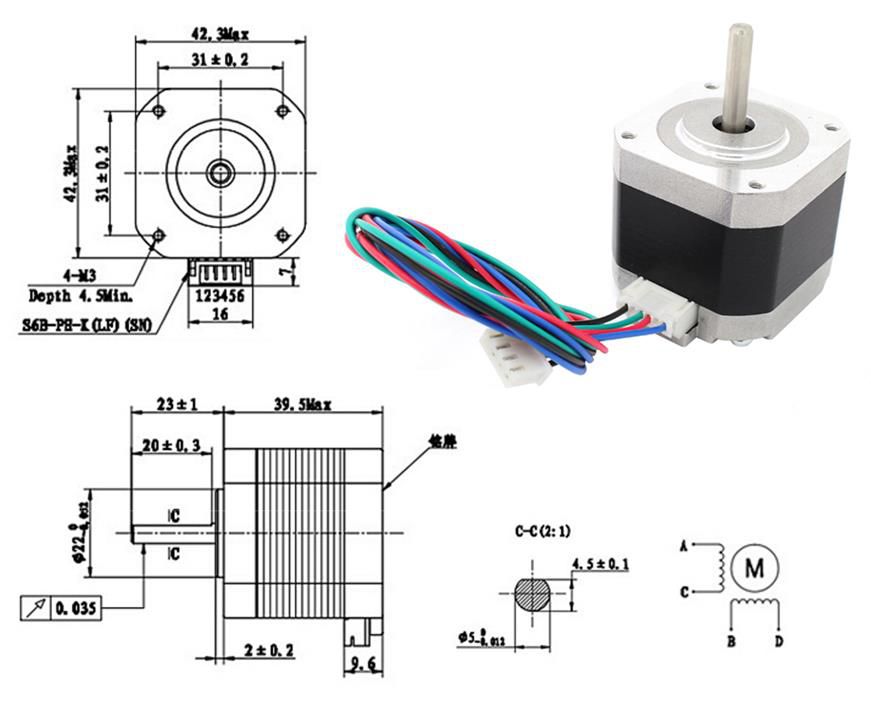 На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Например, этот мотор даст 8 шагов на оборот!
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.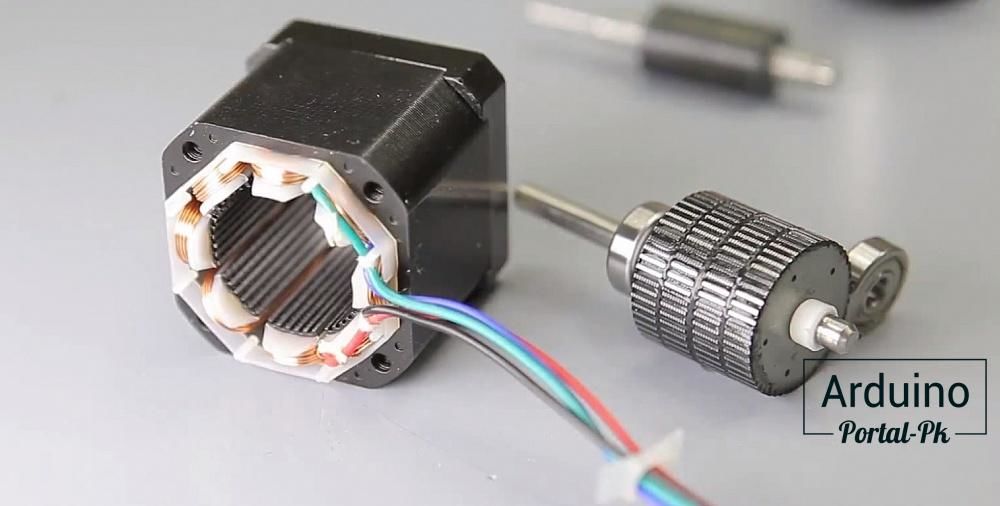
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами.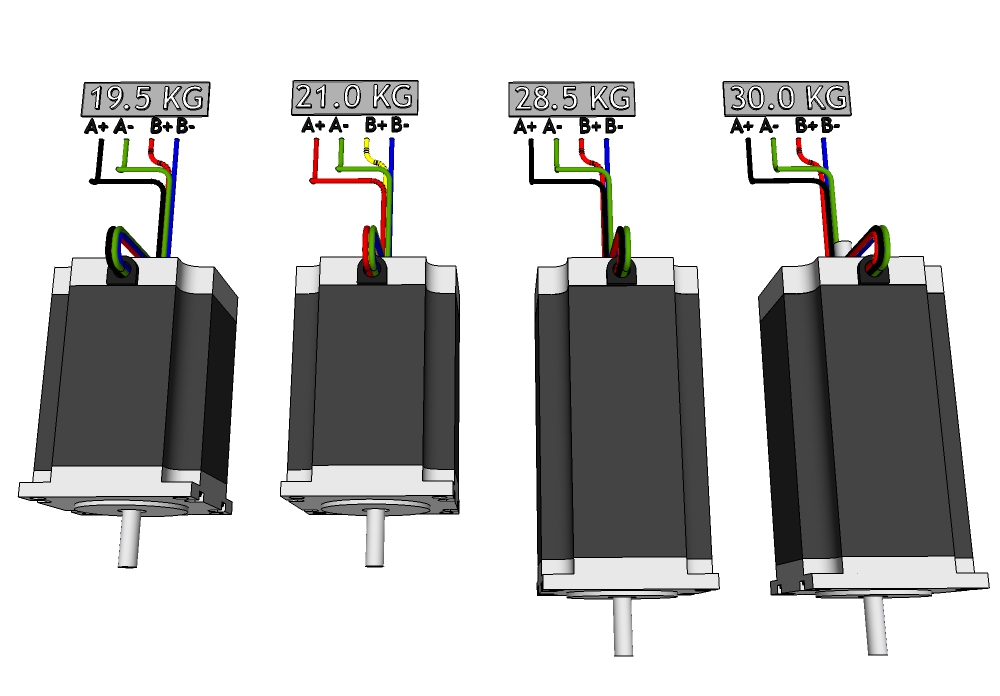 Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
RS Компоненты | Электронные и электрические расходные материалы
Компоненты РС | Электронные и электрические принадлежности | Австралия
- Справка
- Центр обнаружения
- Специальные предложения и распродажа
- Торговый прилавок
Разделы нашей продукции:
- Доступ, хранение и обработка материалов
- Клеи, герметики и ленты
- Подшипники и уплотнения
- Инженерные материалы и промышленное оборудование
- Застежки и крепления
- Ручной инструмент
- Механическая передача энергии
- Сантехника и трубопровод
- Пневматика и гидравлика
- Электроинструменты, Пайка и сварка
- Механизм автоматизации и управления
- Кабели и провода
- Корпуса и серверные стойки
- Предохранители и автоматические выключатели
- HVAC, вентиляторы и управление температурным режимом
- Осветительные приборы
- Реле и формирование сигналов
- Переключатели
- Аккумуляторы и зарядные устройства
- Соединители
- Дисплеи и оптоэлектроника
- Контроль электростатического разряда, чистые помещения и прототипирование печатных плат
- Пассивные компоненты
- Блоки питания и трансформаторы
- Raspberry Pi, Arduino, ROCK и инструменты разработки
- Полупроводники
- Компьютеры и периферия
- Уборка и техническое обслуживание помещений
- Офисные принадлежности
- Средства индивидуальной защиты и рабочая одежда
- Безопасность и скобяные изделия
- Безопасность сайта
- Испытания и измерения
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электромеханическое устройство, преобразующее электрическую энергию в механическую. В то же время шаговый двигатель — это бесщеточный синхронный двигатель, способный разделить полный оборот на огромное количество шагов. Когда шаговый двигатель применяется с электрическими командными импульсами в правильной последовательности, вал или шпиндель шагового двигателя вращаются дискретными шагами, что позволяет точно контролировать положение двигателя без какого-либо механизма обратной связи, если размер двигателя соответствует применению. .
В то же время шаговый двигатель — это бесщеточный синхронный двигатель, способный разделить полный оборот на огромное количество шагов. Когда шаговый двигатель применяется с электрическими командными импульсами в правильной последовательности, вал или шпиндель шагового двигателя вращаются дискретными шагами, что позволяет точно контролировать положение двигателя без какого-либо механизма обратной связи, если размер двигателя соответствует применению. .
1. Конструкция шаговых двигателей
Шаговые двигатели обычно состоят из передней и задней торцевых крышек, подшипников, центрального вала, сердечника ротора, сердечника статора, узла статора, гофрированных шайб, винтов и других деталей. Двумя основными частями шагового двигателя являются статор и ротор. Оба они состоят из магнитных материалов с шестью и четырьмя магнитными полюсами соответственно. Шесть магнитных полюсов статора имеют обмотки управления, а два противоположных полюса образуют фазу.
2. Типы шаговых двигателей
Типы шаговых двигателей
Существует три основных типа шаговых двигателей: реактивный ротор: шаговый двигатель с переменным сопротивлением (VR), активный ротор: шаговый двигатель с постоянным магнитом (PM), комбинация VR и PM : Гибридный шаговый двигатель (HY)
Шаговые двигатели с переменным сопротивлением
Шаговые двигатели с переменным сопротивлением представляют собой простейший тип шагового двигателя и состоят из многозубчатого ротора из мягкого железа и обмотки статора. Оба полюса намагничиваются, когда на обмотку статора подается постоянный ток.
Когда зубья ротора притягиваются к полюсам статора, находящимся под напряжением, происходит вращение. Поскольку магниты шаговых двигателей с переменным магнитным сопротивлением меньше и легче, чем магниты шаговых двигателей с постоянными магнитами, они быстрее. Чем меньше площадь между шестернями ротора и статора шагового двигателя с переменным сопротивлением, тем меньше потери магнитной силы.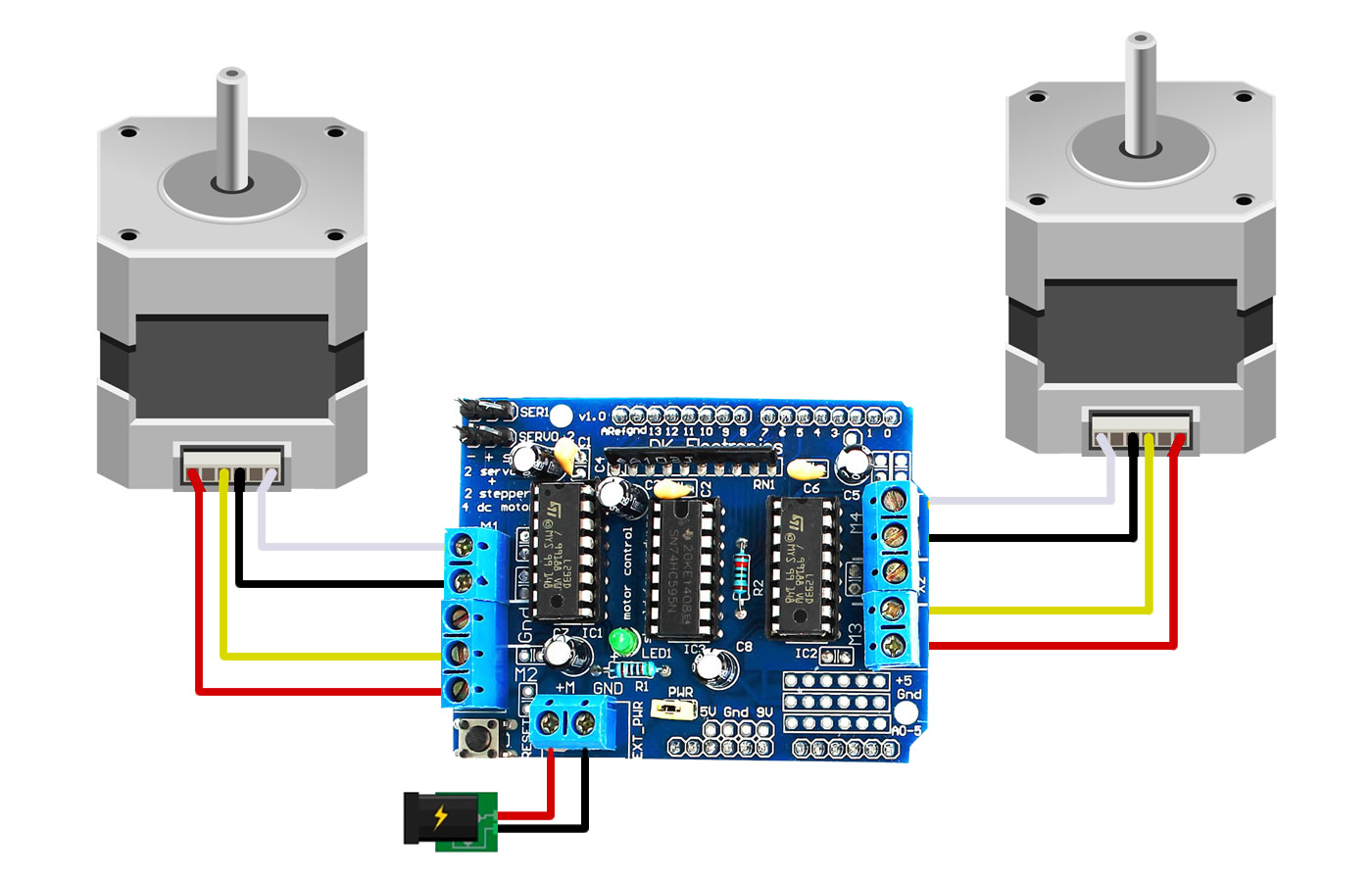
Для этого типа шагового двигателя, несмотря на простоту конструкции и простоту управления, разрешение низкое, а крутящий момент небольшой.
Шаговые двигатели с постоянными магнитами
Постоянные магниты встроены в конструкцию двигателя шагового двигателя с постоянными магнитами. Изменение положения ротора будет вызвано изменением направления тока в катушках, сменой магнитных полюсов. Ротор повернется на 90° при правильном изменении направления тока. Этот единственный шаг двигателя, хотя и полезный в некоторых приложениях, был бы очень большим и неточным. Поэтому реально существующие двигатели с постоянными магнитами имеют большее количество полюсов ротора и несколько магнитов, установленных на роторе для увеличения числа шагов и точности позиционирования.
Намагниченные полюса ротора обеспечивают большую интенсивность магнитного потока, в результате чего двигатели с постоянными магнитами демонстрируют лучшие характеристики крутящего момента, чем шаговые двигатели с переменным сопротивлением. Простая конструкция позволяет получить двигатель по умеренной цене с довольно низким разрешением.
Простая конструкция позволяет получить двигатель по умеренной цене с довольно низким разрешением.
Гибридные шаговые двигатели
Гибридные шаговые двигатели являются одним из наиболее широко используемых типов шаговых двигателей в промышленности. Гибридные шаговые двигатели сочетают в себе лучшие характеристики шаговых двигателей с переменным магнитным сопротивлением и шаговых двигателей с постоянными магнитами, поэтому они более дорогие. Гибридные шаговые двигатели обеспечивают лучшую производительность с точки зрения шагового разрешения, крутящего момента и скорости.
Ротор гибридного шагового двигателя состоит из постоянных магнитов, но, в отличие от рассмотренных выше моделей, магниты установлены не радиально, а намагничены аксиально. Обычно ротор состоит из двух противоположных намагниченных колец, расположенных на валу двигателя. В каждом кольце имеются прорези, образующие зубья ротора.
Количество полных шагов за оборот можно рассчитать по следующей формуле:
- SPR = NR x Ø
- Где: SPR = количество шагов за оборот
- NR = общее количество зубьев ротора (всего для обоих ярма)
- Ø = количество фаз двигателя
- или: NR = SPR/Ø
| Сравнение | Шаговый двигатель с переменным сопротивлением (VR ) | Шаговый двигатель с постоянными магнитами (PM) | Гибридный шаговый двигатель (HB) |
| Стоимость | Средний | Относительно дорогой | |
| Структура конструкции | Простой | Средний | Относительно сложный |
| Разрешение | Угол шага: 1,8°, 0,9° или меньше | Угол шага: 3°~30° | Угол шага: 1,8°, 0,9° или менее |
| Кривая скорости вращения | Нет значительного падения момента на высокой скорости | Большой момент на низкой скорости, значительное падение момента на высокой скорости | Большой момент на низкой скорости, значительное падение момента на высокой скорости |
| Шум | Больше шума | Меньше шума | Больше шума (лучше с микроступенчатым делением) |
| Тепловыделение | Высокое повышение температуры (ne ed радиатор) | Низкое повышение температуры | Низкое повышение температуры |
| Микрошаговое подразделение | Обычно работают только на полном шаге | Ферритовые или неодим-железо-борные магниты | Неодим-железо-борные магниты |
| Материал ротора | Лист кремнистой стали (без постоянных магнитов) | Полный шаг, полушаг, микрошаг | Полный шаг, полушаг, микрошаг |
| Поверхность ротора | Многозубая конструкция на роторе внешняя поверхность | Гладкая и беззубчатая | Многозубая конструкция на внешней поверхности ротора |
| Магнитный крутящий момент | Создает только привлекательный крутящий момент | Как притягивающий, так и отталкивающий крутящий момент во время работы | Момент притяжения и отталкивания во время работы |
3. Типы проводки
Типы проводки
90 012 Другая классификация шаговых двигателей основана на типе обмотки двухфазного двигателя. В соответствии с этой классификацией шаговые двигатели подразделяются на униполярные и биполярные.
Основное отличие состоит в том, что однополярные двигатели работают с одной полярностью тока (напряжения), а двухполярные двигатели работают с двумя полярностями, что означает, что направление тока в катушках переменное. Еще одно отличие состоит в том, что катушки двигателя должны быть соединены, чтобы передавать мощность с конца одной катушки на начало другой. Этот метод подключения позволяет использовать одну полярность тока (напряжения). Биполярный двигатель имеет более высокий крутящий момент, чем униполярный, но им сложнее управлять.
Биполярный шаговый двигатель и соединение обмоток
Униполярный шаговый двигатель и соединение его обмоток
| Биполярный шаговый двигатель | |
| Высокий крутящий момент | Низкий крутящий момент |
| Верхнее крепление за счет обмотки | Нижнее крепление |
| Меньше | Больше |
| Дешевле | Более дорогое |
| Более сложное управление, для которого требуется плата, включающая в себя ступени управления мощностью и скоростью вращения | Более простое управление, требующее наличия только одной силовой цепи |
4. Преимущества шаговых двигателей
Преимущества шаговых двигателей
- Позиционирование – Благодаря тому, что шаговые двигатели движутся с точными повторяемыми шагами, они хорошо работают в приложениях, требующих точного позиционирования.
- Контроль скорости — Точные приращения движения обеспечивают отличный контроль скорости.
- Крутящий момент при низкой скорости — Шаговые двигатели имеют высокий крутящий момент при низких скоростях.
5. Недостатки шаговых двигателей
- Низкий КПД — По сравнению с двигателями постоянного тока они потребляют больше тока. Поэтому они склонны к перегреву.
- Ограниченный крутящий момент на высокой скорости — Крутящий момент двигателя быстро падает при уменьшении скорости
- Нет обратной связи — Обратная связь не используется для указания возможных пропущенных шагов
- Высокий уровень вибрации и шума — На очень высоких скоростях эксплуатация этого двигателя непростая.

- Возможная потеря синхронизации — Вызвана такими факторами, как неожиданное изменение нагрузки
- Небольшой крутящий момент по отношению к коэффициенту инерции
- Требуется схема привода

9 0095 6. Для чего используются шаговые двигатели?
Таким образом, шаговые двигатели являются хорошим выбором для приложений, требующих низкой скорости и высокой точности. Некоторые из этих повседневных приложений перечислены ниже:
Шаговые двигатели для 3D-принтеров
Шаговые двигатели почти всегда входят в состав обычных 3D-принтеров. Использование шаговых двигателей в 3D-принтерах обеспечивает высокоточное движение и позиционирование без необходимости использования кодировщиков и другого дополнительного программного обеспечения или датчиков с минимальными затратами. Шаговые двигатели могут перемещаться на известный интервал, а затем удерживать это положение. Они хорошо подходят для перемещения объектов в повторяемые положения.
В зависимости от типа принтера они используются в различных приложениях. Например, шаговые двигатели используются для перемещения экструдера или платформы сборки по осям X, Y и Z по отдельности. Узел экструдера также имеет шаговый двигатель, который используется для протягивания нити в экструдер и управления подачей однородного и ровного материала в машину на протяжении всего процесса печати.
Доступны шаговые двигатели различных размеров. наиболее распространенными размерами, используемыми в 3D-принтерах, являются NEMA 14, NEMA 17, NEMA 23 и NEMA 24.
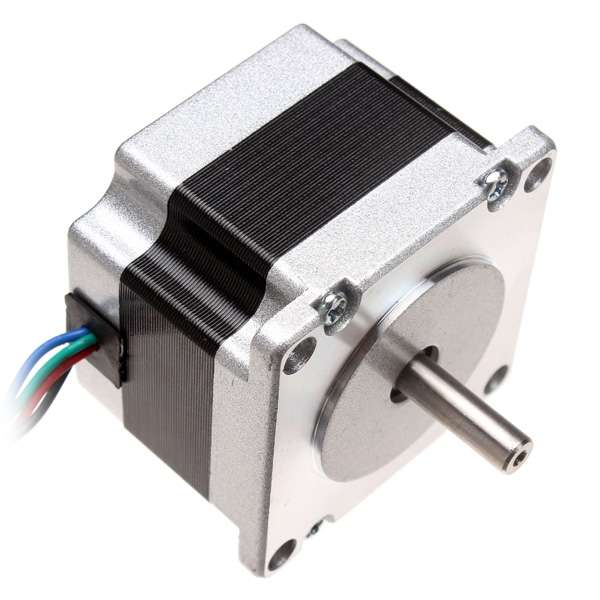
Шаговые двигатели для ЧПУ
Шаговые двигатели являются альтернативой серводвигателям и могут питать большинство типов станков с ЧПУ. Шаговые двигатели имеют небольшую площадь основания и простую конструкцию, что делает их идеальными для небольших приложений, таких как фрезерные станки с ЧПУ. Шаговые двигатели стоят меньше, чем серводвигатели при той же мощности, но современные версии шаговых двигателей часто имеют те же функции.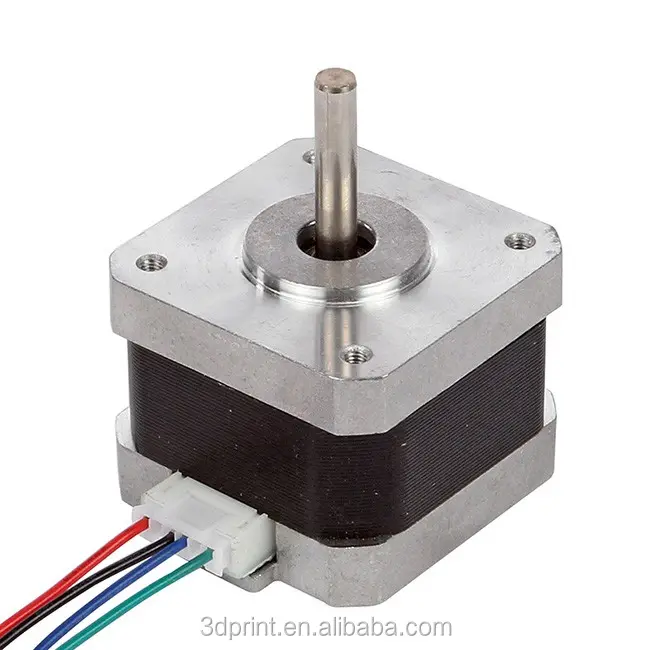 Шаговые двигатели проще понять и эксплуатировать из-за отсутствия энкодеров, а шаговые двигатели также бесщеточные и простые в обслуживании.
Шаговые двигатели проще понять и эксплуатировать из-за отсутствия энкодеров, а шаговые двигатели также бесщеточные и простые в обслуживании.
Шаговые двигатели обычно могут обеспечивать скорость подачи от 50 до 1000 дюймов в минуту, тогда как серводвигатели могут достигать более 2500 дюймов в минуту. Если вам нужна очень высокая точность и высокая скорость производства, лучшим выбором будут серводвигатели.
Для приложений, не требующих сверхвысокой точности. В большинстве фрезерных станков с ЧПУ стоимостью менее 25 000 долларов используются шаговые двигатели, а не серводвигатели. Шаговые двигатели с обратной связью также заслуживают внимания, они хорошо предотвращают ошибки из-за пропущенных шагов и могут быть хорошим выбором, когда вам нужно экономичное решение для дорогих заготовок.
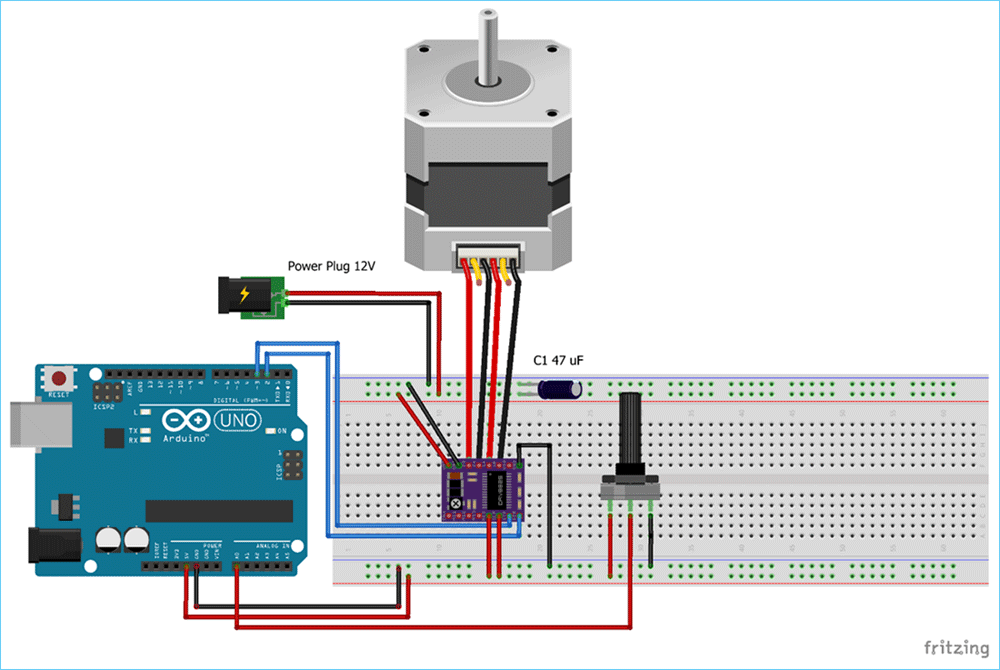
Шаговые двигатели для Raspberry Pi, Arduino, MicroPython (например, pyboard, Wipy, ESP32, ESP8266 и MicroBit) и т. д., чтобы любители научились базовым навыкам компьютерного программирования. Это часто рассматривается как логичный следующий шаг после обучения манипулированию и управлению небольшими недорогими шаговыми двигателями, чтобы научиться управлять циклами включения / выключения светодиодов и другими простыми переключателями или типами зуммера.
Это часто рассматривается как логичный следующий шаг после обучения манипулированию и управлению небольшими недорогими шаговыми двигателями, чтобы научиться управлять циклами включения / выключения светодиодов и другими простыми переключателями или типами зуммера.
На STEPPERONLINE доступно множество типов шаговых двигателей для таких приложений, начиная с очень недорогих версий на 5 В, которые легко подключаются к разъемам на материнской плате Raspberry Pi.
Шаговые двигатели для робототехники
Шаговые двигатели могут использоваться для управления движением, выступая в качестве исполнительных механизмов, которые активируют суставы робота и могут ускорять полезную нагрузку до желаемой скорости.
Шаговые двигатели для камер
Шаговые двигатели имеют множество применений в видеосъемке камер и обычно используются для автофокусировки и масштабирования камер. Поскольку шаговый двигатель обеспечивает плавное и высокоточное управление, он позволяет свести к минимуму ошибки в процессе обнаружения и обеспечить точную и плавную фокусировку в сочетании с новейшей технологией просмотра в реальном времени.