Содержание
Сравнение сервоприводов и шаговых двигателей
Содержание:
- 1. Физика процесса
- 2. Асинхронные двигатели
- 3. Синхронные двигатели
- 4. Шаговые двигатели
- 5. Двигатели с постоянными магнитами
- 6. Гибридные двигатели
- 7. Сервопривод
- 8. Вывод
Рисунок 1 — Сервопривод
1. Физика процесса
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического регулирования и управления, в быту. Электрические машины преобразуют механическую энергию в электрическую и наоборот, электрическую энергию в механическую. Машина, преобразующая механическую энергию в электрическую, называется генератором. Преобразование электрической энергии в механическую осуществляется двигателями.Принцип действия электрических машин основан на использовании законов электромагнитной индукции и электромагнитных сил. Если в магнитном поле полюсов постоянных магнитов или электромагнитов поместить проводник и под действием какой-либо силы F1 перемещать его, то в нем возникает Э. Д.С. равная:
Д.С. равная:
E=B×I×vE= B times I times v
где В — магнитная индукция в месте, где находится проводник,
l — активная длина проводника (та его часть, которая находится в магнитном поле),
v — скорость перемещения проводника в магнитном поле.
Если этот проводник замкнуть на какой-либо приемник энергии, то в замкнутой цепи под действием Э.Д.С. будет протекать ток, совпадающий по направлению с Э.Д.С. в проводнике. В результате взаимодействия тока I в проводнике с магнитным полем полюсов создается электромагнитная сила Fэ, направление которой определяется по правилу левой руки; эта сила будет направлена навстречу силе, перемещающей проводник в магнитном поле. При равенстве сил F1 = Fэ проводник будет перемещаться с постоянной скоростью. Следовательно, в такой простейшей электрической машине механическая энергия, затрачиваемая на перемещение проводника, преобразуется в энергию электрическую, отдаваемую сопротивлению внешнего приемника энергии, т. е. машина работает генератором. Та же простейшая электрическая машина может работать двигателем. Если от постороннего источника электрической энергии через проводник пропустить ток, то в результате взаимодействия тока в проводнике с магнитным полем полюсов создается электромагнитная сила Рэ, под действием которой проводник начнет перемещаться в магнитном поле, преодолевая силу торможения какого-либо механического приемника энергии.
е. машина работает генератором. Та же простейшая электрическая машина может работать двигателем. Если от постороннего источника электрической энергии через проводник пропустить ток, то в результате взаимодействия тока в проводнике с магнитным полем полюсов создается электромагнитная сила Рэ, под действием которой проводник начнет перемещаться в магнитном поле, преодолевая силу торможения какого-либо механического приемника энергии.
Рисунок 2 — Физика процесса
Таким образом, рассмотренная машина так же, как и любая электрическая машина, обратима, т. е. может работать как генератором, так и двигателем. Для увеличения Э.Д.С. и электромеханических сил электрические машины снабжаются обмотками, состоящими из большого числа проводов, которые соединяются между собой так, чтобы Э.Д.С. в них имели одинаковое направление и складывались. Э.Д.С. в проводнике будет индуктирована также и в том случае, когда проводник неподвижен, а перемещается магнитное поле полюсов.
2. Асинхронные двигатели
Наиболее распространенные электрические машины.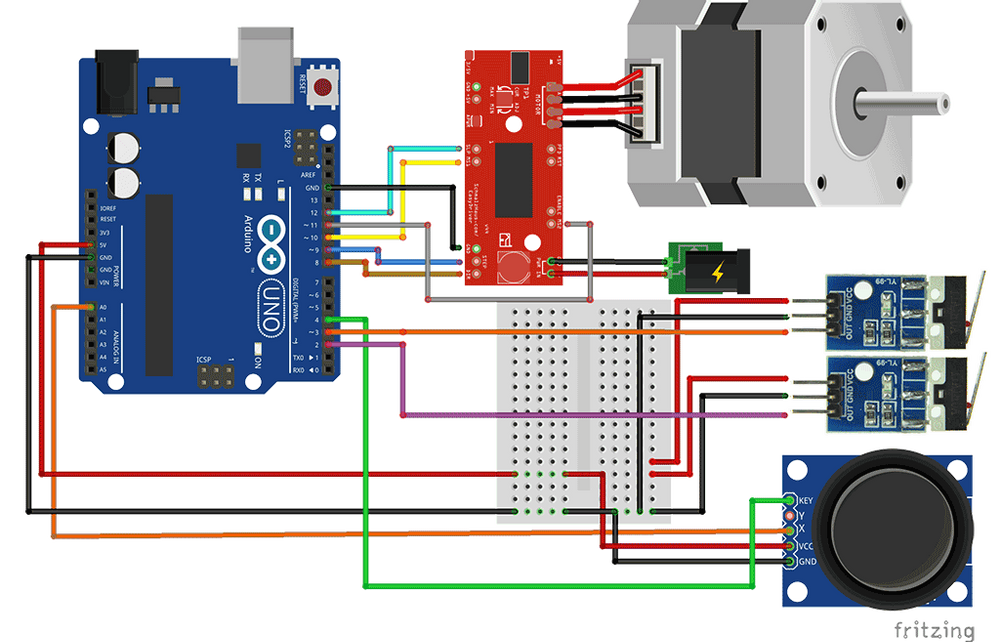 В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.Асинхронный двигатель имеет статор
В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.Асинхронный двигатель имеет статор
(неподвижная часть) и ротор (подвижная часть), разделенные воздушным зазором, ротор крепится на подшипниках. Активными частями являются обмотки; все остальные части — конструктивные, обеспечивающие необходимую прочность, жесткость, охлаждение, возможность вращения и т. п. По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из электротехнической стали и шихтованным. Фазный ротор используют когда необходимо создать большой пусковой момент. К ротору подводят ток и в результате уже возникает магнитный поток необходимый для создания момента.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле.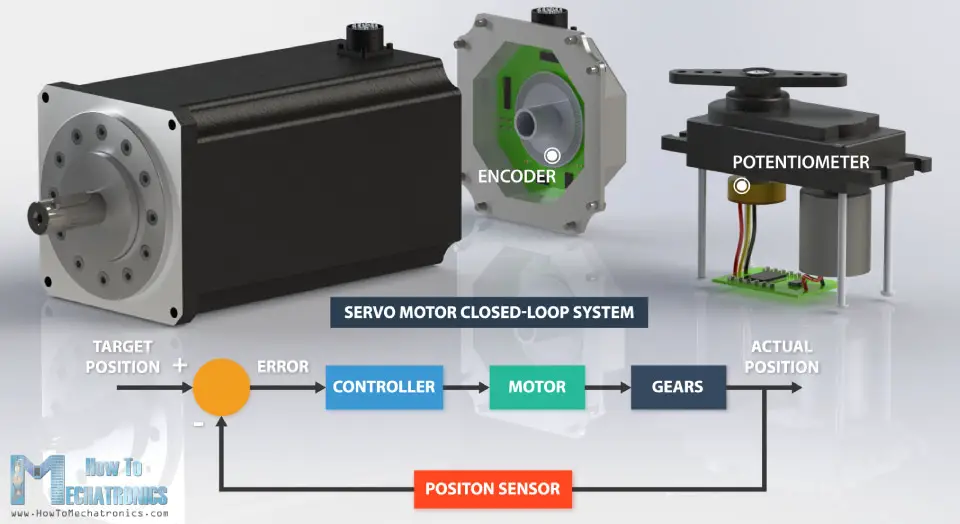 Магнитное поле воздействует на стержни ротора и по закону магнитной индукции возникает электрический ток т. к. изменяется магнитный поток, проходящий через замкнутый контур ротора. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности создает вращающийся электромагнитный момент ротора из-за того, что индукционный ток, возникающий в замкнутом контуре ротора, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток. Следовательно и возникает вращение.Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора Э.Д.С. и, в свою очередь, создавать крутящий момент.
Магнитное поле воздействует на стержни ротора и по закону магнитной индукции возникает электрический ток т. к. изменяется магнитный поток, проходящий через замкнутый контур ротора. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности создает вращающийся электромагнитный момент ротора из-за того, что индукционный ток, возникающий в замкнутом контуре ротора, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток. Следовательно и возникает вращение.Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора Э.Д.С. и, в свою очередь, создавать крутящий момент.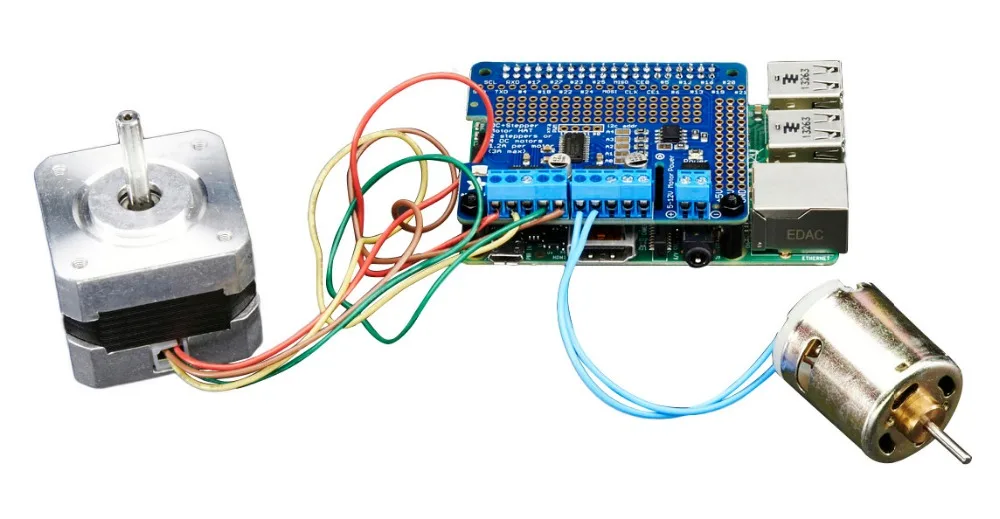
Рисунок 3 — Вид асинхронной машины с короткозамкнутым ротором в разрезе
На рисунке приведен вид асинхронной машины с короткозамкнутым ротором в разрезе:
1 — станина,
2 — сердечник статора,
3 — обмотка статора,
4 — сердечник ротора с короткозамкнутой обмоткой,
5 — вал.
3. Синхронные двигатели
Синхронный двигатель не имеет принципиальных конструктивных отличий от асинхронных. На статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока будет создано вращающееся магнитное поле, число оборотов в минуту которого n = 60f/p, где f — частота напряжения питания привода. На роторе двигателя помещена обмотка возбуждения, включаемая в сеть источника постоянного тока. Либо ротор выполнен из постоянного магнита. Ток возбуждения создает магнитный поток полюсов или в случае с постоянным магнитом, магнитный поток уже создан. Вращающееся магнитное поле, полученное токами обмотки статора, увлекает за собой полюса ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
Достоинством синхронных двигателей является меньшая, чем у асинхронных, чувствительность к изменению напряжения питающей сети. У синхронных двигателей вращающий момент пропорционален напряжению сети в первой степени, тогда как у асинхронных — квадрату напряжения. Вращающий момент синхронного двигателя создается в результате взаимодействия магнитного поля статора с магнитным полем полюсов. От напряжения питающей сети зависит только магнитный поток поля статора.
4. Шаговые двигатели
Шаговые двигатели — это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. По сути шаговый двигатель является синхронным, но отличается подходом управления.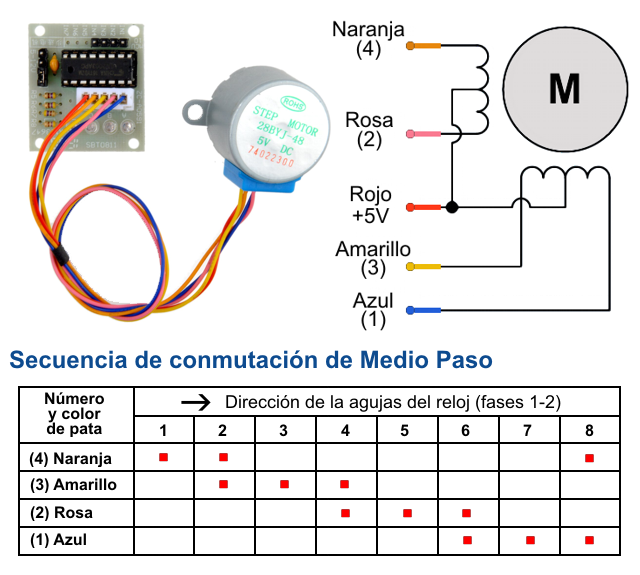 Рассмотрим самые распространенные.
Рассмотрим самые распространенные.
5. Двигатели с постоянными магнитами
Рисунок 4 — Ротор
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением. Такой двигатель имеет величину шага 30°. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48—24 шага на оборот (угол шага 7,5—15°). Двигатели с постоянными магнитами подвержены влиянию обратной Э.Д.С. со стороны ротора, котрая ограничивает максимальную скорость.
6.
 Гибридные двигатели
Гибридные двигатели
Рисунок 5 — Устройство гибридных двигателей
Являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3,6…0,9°). Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3,6° двигателей и 8 основных полюсов для 1,8…0,9° двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
Обычно используются 4 основных полюса для 3,6° двигателей и 8 основных полюсов для 1,8…0,9° двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
S=360/(Nph×Ph)=360/NS= 360 / ( Nph times Ph ) = 360 / N
где Nph — число эквивалентных полюсов на фазу, равное числу полюсов ротора,
Ph — число фаз,
N — полное количество полюсов для всех фаз вместе.
7. Сервопривод
Рисунок 6 — График зависимости момента от скорости вращения двигателя
Сервопривод — общее название привода, синхронного, асинхронного либо любого другого, с отрицательной обратной связью по положению, моменту и др. параметрам, позволяющего точно управлять параметрами движения. Сервопривод – это комплекс технических средств. Состав сервопривода: привод – например, электромотор, датчик обратной связи – например, датчик угла поворота выходного вала редуктора (энкодер), блок питания и управления (он же преобразователь частоты \ сервоусилитель \ инвертор \ servodrive). Мощность двигателей: 0,05…15 кВт. Существует понятие «вентильный двигатель». Это всего лишь названия для двигателя, управление которым осуществляется через «вентили» – ключи, переключатели и т. п. коммутационные элементы. Современными «вентилями» являются IGBT-транзисторы использующиеся в блоках управления приводами. Никакого конструктивного отличия нет. Основным достоинством сервоприводов является наличие обратной связи, благодаря которой такая система может поддерживать точность позиционирования на высоких скоростях и высоких моментах. Также систему отличает низкоинерционность и высокие динамические характеристики, например время переключения от скорости –3 000 об/мин до достижения 3 000 об/мин составляет всего 0,1 с.
параметрам, позволяющего точно управлять параметрами движения. Сервопривод – это комплекс технических средств. Состав сервопривода: привод – например, электромотор, датчик обратной связи – например, датчик угла поворота выходного вала редуктора (энкодер), блок питания и управления (он же преобразователь частоты \ сервоусилитель \ инвертор \ servodrive). Мощность двигателей: 0,05…15 кВт. Существует понятие «вентильный двигатель». Это всего лишь названия для двигателя, управление которым осуществляется через «вентили» – ключи, переключатели и т. п. коммутационные элементы. Современными «вентилями» являются IGBT-транзисторы использующиеся в блоках управления приводами. Никакого конструктивного отличия нет. Основным достоинством сервоприводов является наличие обратной связи, благодаря которой такая система может поддерживать точность позиционирования на высоких скоростях и высоких моментах. Также систему отличает низкоинерционность и высокие динамические характеристики, например время переключения от скорости –3 000 об/мин до достижения 3 000 об/мин составляет всего 0,1 с. Современные блоки управления являются высокотехнологическими изделиями со сложной системой управления и могут обеспечить выполнение практически любой задачи.
Современные блоки управления являются высокотехнологическими изделиями со сложной системой управления и могут обеспечить выполнение практически любой задачи.
Характеристики системы сервопривода рассмотрим основываясь на сервоприводах фирмы Delta elc. Серии блока управления ASDA-A и двигателем 400 Вт. Как видно поддержание момента линейное на всем диапазоне скоростей. Это достигается благодаря использованию синхронного двигателя в высококачественном исполнении. Величина шага перемещения определяется разрешающей способностью датчика обратной связи, энкодера, а так же блоком управления. Стандартные сервоприводы могут обеспечить шаг в 0,036° т. е. 1/10 000 от оборота, и это на скоростях до 5 000 об/мин.
Самые современные сервоприводы отрабатывают шаг в 1/2 500 000.
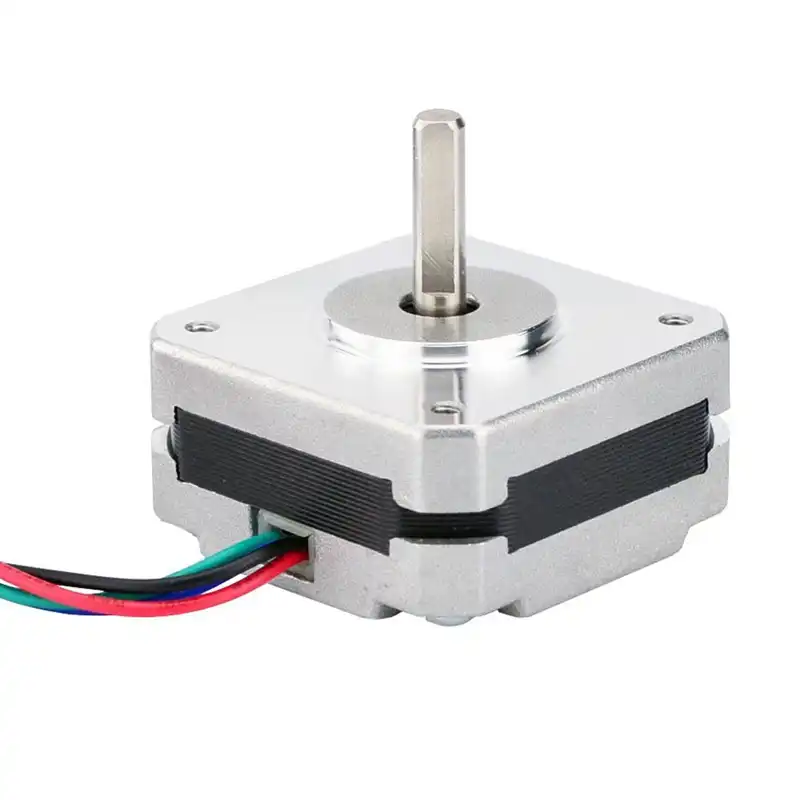
Рисунок 7 — Шаговый двигательРисунок 8 — Серводвигатель
| Шаговый двигатель | Серводвигатель |
|---|---|
| Надежность | |
| Шаговые двигатели обладают высокой надежностью, так как в их конструкции отсутствуют изнашивающиеся детали. Рабочий ресурс двигателя зависит только от ресурса примененных в нем подшипников. | Большинство современных бесколлекторных сервоприводов от известных производителей (Mitsubishi, Siemens, Omron, Delta) отличаются высокой надежностью, порой сравнимой с надежностью шаговых двигателей, даже несмотря на значительно более сложное устройство сервопривода. |
| Эффект потери шагов | |
| Всем шаговым двигателям присуще свойство потери шагов. Данный эффект проявляется в некотором неконтролируемом смещении траектории перемещения инструмента, от необходимой траектории. При изготовлении простых деталей, имеющих малую длину траектории перемещения инструмента и при невысоких требованиях к изделию, в большинстве случаем данным эффектом можно пренебречь. Но при обработке сложных изделий (пресс-формы, резьба и т. п.), где длина траектории может достигать километров!, данный эффект в большинстве случаев будет приводить к неисправимому браку. Данный эффект проявляется при выходе за допустимые характеристики двигателя, при неправильном управлении двигателем, а также при «проблемах» с механикой. Применение современных технологий управления шаговыми двигателями, с применением современной электроники, позволяет полностью устранить данный эффект, но стоимость возрастает. | Эффект потери шагов у сервоприводов полностью отсутствует. Потому, что в каждом сервоприводе имеется датчик положения (энкодер), который постоянно отслеживает положение ротора двигателя и при необходимости выдает команды коррекции положения, на основании которых управляющая электроника, проанализировав данные, полученные с энкодера, вырабатывает необходимые сигналы управления на двигатель. Данный механизм называется обратной связью. |
| Скорость перемещения | |
| При использовании шаговых двигателей в приводах подач в станках с ЧПУ можно добиться скорости 150…300 мм/сек (бывает и больше, но это уже «экзотика»). При максимальных скоростях и при превышении допустимой нагрузки возможно проявление эффекта потери шагов. | Приводы подач станков с ЧПУ на основе серводвигателей позволяют достигать высоких скоростей. Скорость холостого перемещения 0,5…1 м/c является нормальным явлением для сервоприводов. |
| Динамическая точность* | |
| Динамическая точность является определяющей характеристикой при обработке сложноконтурных изделий (пресс-формы, резьба и т. п.). Шаговые двигатели отличаются высокой динамической точностью, которая является следствием принципов работы шагового двигателя. Обычно, на хорошей механике, рассогласование не превышает 20 мкм (1 мкм = 0,001 мм). | Высококачественные сервоприводы имеют высокую динамическую точность до 1…2 мкм и выше! (1 мкм = 0,001 мм). Для получения высокой динамической точности необходимо применять сервоприводы, предназначенные для контурного управления, которые точно отрабатывают заданную траекторию. |
| Стоимость | |
| В шаговых двигателях применяются дорогостоящие редкоземельные магниты, а также ротор и статор изготавливаются с прецизионной точностью, и поэтому по сравнению с общепромышленными электродвигателями шаговые двигатели имеют более высокую стоимость. | Применение дорогостоящего датчика положения ротора, а также применение достаточно сложного блока управления обуславливает значительно более высокую стоимость, чем у шагового двигателя. |
| Стоимость систем для создания момента в 2 Нм | |
| Гибридный шаговый двигатель с шагом 1,8° – 12 000 р. Блок управления – 9 600 р. | Привод с энкодером обеспечивающий шаг в 0,036°, максимальную скорость 3 000 об/мин — 12 704 р. Блок управления – 13 000 р. |
| Ремонтопригодность | |
| шагового двигателя может выйти из строя только обмотка статора, а ее замену может произвести только производитель двигателя, так как если двигатель даже только разобрать и снова собрать, он уже не будет работать! Потому, что при разборке двигателя происходит разрыв магнитных цепей внутри двигателя и происходит размагничивание магнитов. Поэтому после сборки двигателя требуется намагничивание внутренних магнитов на специальной установке. | Поврежденный серводвигатель в большинстве случаев проще заменить, чем ремонтировать. Ремонту в основном подвергают только мощные двигатели, имеющие весьма высокую стоимость. |
| Столкновение с препятствием | |
| Столкновение подвижных узлов станка с препятствием, в результате которого происходит остановка шагового двигателя, не взывает у него каких-либо повреждений. | В станке на базе сервоприводов, при столкновении подвижных узлов с препятствием, управляющая электроника определяет, что произошло повышение нагрузки и для компенсации повышенной нагрузки повышает уровень тока, подаваемый на двигатель. При полной принудительной остановке на серводвигатель подается максимальный ток. Поэтому, если управляющая электроника не отслеживает подобную ситуацию, то возможно сгорание двигателя. |
| Преимущества | |
|
|
| Недостатки | |
|
|
* — Динамическая точность — максимальное отклонение реальной траектории перемещения инструмента от запрограммированной
8.
Вывод
Сервопривод и шаговый двигатель не являются конкурентами, а каждый занимает свою определенную нишу. Сравним их на основе рынка станков с ЧПУ. Применение шаговых двигателей полностью оправданно для применения в
недорогих станках с ЧПУ (в ценовой категории до 10—12 тыс. USD), предназначенных для обработки дерева, пластиков, ДСП, МДФ, легких металлов и других материалов средней скорости.Применение высококачественных сервоприводов необходимо в высокопроизводительном оборудовании, где главным критерием является производительность. Единственный «недостаток» хорошего сервопривода – это его высокая стоимость. К примеру, станок ATS-760 на шаговых приводах стоит 11 000 $, а эта же модель, но на сервоприводах стоит 17 500 $. Однако возможности получения высокостабильного или точного управления, широкий диапазон регулирования скорости, высокая помехоустойчивость, малые габариты и вес часто являются решающими факторами их применения. Добившись одинаковых качеств от сервопривода и шагового их стоимости станут соизмеримыми при однозначном лидерстве сервопривода.
Серводвигатели или шаговые двигатели. Что лучше для ЧПУ станка?
Станки с ЧПУ в основном используют шаговые или серводвигатели для своих осей.
Хотя оба двигателя могут управлять движением режущих инструментов и осей, в чем разница между ними?
Вместо того, чтобы углубляться в их теоретические различия, я расскажу вам о каждом важном отличии, имеющем практическое значение с точки зрения применения ЧПУ.
1. Размер фрезерного станка с ЧПУ
Размер фрезерных станков с ЧПУ играет жизненно важную роль при выборе двигателя.
Если вы хотите настроить фрезерный станок с ЧПУ с небольшой площадью основания и небольшой рабочей зоной, шаговый двигатель может быть лучше, чем сервопривод.
Как правило, шаговые двигатели используются для привода компонентов линейного перемещения, таких как ременный привод, ходовой винт и шариковый винт фрезерных станков с ЧПУ с максимальной площадью резания 4 х 4 фута.
Некоторые промышленные фрезерные станки с ЧПУ начального уровня с площадью резания 4 x 8 футов и 5 футов x 10 футов также используют шаговые двигатели, что помогает снизить стоимость.
В больших фрезерных станках с ЧПУ размер порталов велик и склонен к изгибу, для предотвращения изгиба используется более тяжелая конструкция.
В таких случаях серводвигатель является более подходящим выбором.
Серводвигатели
Еще одним фактором является размер самого двигателя. Из-за сложной конструкции серводвигатели крупнее и тяжелее шаговых двигателей.
Это означает, что для небольших приложений с ЧПУ степперы являются лучшим выбором.
2. Управление двигателем
Шаговые двигатели перемещаются на заданное количество шагов с каждым импульсом, и контроллер не может узнать, двигался ли двигатель.
Принимая во внимание, что серводвигатель имеет замкнутый контур управления, что означает, что двигатель отправляет информацию о своем положении и направлении обратно в контроллер.
Таким образом, контроллер может проверить, не произошла ли какая-либо ошибка. Это может иметь решающее значение при работе с дорогостоящими заготовками.
Например, предположим, что вы делаете 2-дюймовый пропил на дорогостоящей заготовке, и что-то заклинило ваши линейные приводы или портал.
Если вы используете шаговые двигатели, двигатель пропустит несколько шагов и продолжит резку, а поскольку он пропустил шаги, он остановится и не будет резать до 2 дюймов.
Вам придется выбросить заготовку (или перепрофилировать ее) и начать с новой.
Принимая во внимание, что если вы используете сервоприводы, контроллер знает, как далеко на самом деле переместилась ось, и будет продолжать движение, пока не завершит весь разрез.
Что ж, это также означает, что контроллер для серводвигателя сложнее и дороже, чем контроллер для шагового двигателя.
Другой вариант достижения хороших результатов при низких затратах — использование шаговых двигателей с обратной связью.
Эти двигатели не такие дорогие, как серводвигатели, и обладают всеми характеристиками шагового двигателя с дополнительным преимуществом предотвращения ошибок.
Например, ToAUTO имеет шаговый двигатель NEMA 23 с обратной связью. Он имеет датчики положения, которые обеспечивают обратную связь для коррекции положения.
Так что, если вы хотите делать точные разрезы на заготовках для приложений, где любая ошибка может иметь катастрофические последствия, серводвигатели идеальны.
Однако программирование сервопривода сложнее, чем программирование шагового двигателя, что делает шаговые двигатели лучшим выбором для начинающих.
Шаговый двигатель с контроллером
3. Скорость и крутящий момент
Шаговые двигатели эффективно работают при 1200 об/мин или ниже и могут создавать высокий крутящий момент на низких скоростях.
Вы можете найти шаговые двигатели с удерживающим моментом, как правило, от 30 до 1500 унций на дюйм.
Но этот крутящий момент уменьшается по мере увеличения скорости двигателя, иногда до 80% при очень высоких оборотах.
Серводвигатели работают со скоростью более 2000 об/мин и доступны с гораздо более высоким номинальным крутящим моментом, чем шаговые двигатели, что делает их быстрее, чем шаговые двигатели.
Самое замечательное в серводвигателях то, что они способны обеспечивать постоянный крутящий момент во всем диапазоне скоростей.
Понятно, что сервоприводы имеют лучшие характеристики крутящего момента по сравнению с шаговыми двигателями, поэтому, если вы хотите использовать действительно тяжелые шпиндели, вам могут понадобиться сервоприводы.
Кроме того, если вы используете тяжелые порталы вместе с тяжелым шпинделем, вам следует рассмотреть возможность использования сервоприводов для увеличения скорости.
Кроме того, сервоприводы лучше работают при динамических нагрузках.
Это означает, что сервоприводы стабильно работают с разными материалами и настройками резки, поскольку они падают под разными нагрузками.
Но это не означает, что шаговые двигатели всегда являются плохим выбором для больших ЧПУ.
Шаговый двигатель NEMA 34 может работать со шпинделем мощностью 7 л.с. на фрезерном станке с ЧПУ из алюминия и стали и при этом достигать высокой скорости около 1000 дюймов в минуту.
Крутящий момент. Шаговые двигатели и серводвигатели
Еще одно существенное различие между ними — время, затрачиваемое на нарезку. Двигатели не могут мгновенно достичь полной скорости, им требуется время, чтобы разогнаться до полной скорости и остановиться.
Когда дело доходит до ускорения и торможения, сервоприводы быстрее на несколько миллисекунд по сравнению с шаговыми двигателями.
Несколько миллисекунд не будут иметь значения, если вы изготавливаете детали с быстрым циклом и с минимальным количеством изменений направления резки.
Но когда вы изготавливаете детали, для которых шпиндель должен часто менять направление, двигатели должны останавливаться, а затем ускоряться в новом направлении.
В таких случаях эти миллисекунды складываются, и существует значительная разница во времени выполнения проекта между сервоприводами и шаговыми двигателями.
Вывод таков: если вы работаете в производственной среде, где скорость производства имеет большое значение, вам следует использовать сервоприводы.
4. Удержание крутящего момента
Удерживающий момент определяет способность вала двигателя оставаться на месте, когда катушки находятся под напряжением.
Шаговый двигатель не будет вращаться без входного сигнала, пока крутящий момент на валу двигателя меньше удерживающего момента двигателя.
Принимая во внимание, что в серводвигателе удерживающий момент практически отсутствует. Так как же серводвигатель удерживает нагрузку на месте?
Механизм обратной связи в серводвигателе обнаруживает любое изменение положения вала и мгновенно корректирует положение вала. Он в основном колеблется в удерживаемом положении, но колебания незначительны.
Но когда сервоприводы настроены неправильно, они производят вибрации и шум при удержании груза в стационарном положении.
Удерживающий момент является основным фактором, когда вам нужно удерживать груз в вертикальном направлении, например, в случае шпинделя на оси Z.
Это особенно важно, когда вы используете шарико-винтовые пары для линейного перемещения.
Внутреннее трение в шарико-винтовых передачах низкое, и они могут иметь обратный привод.
Это означает, что если вы используете шариковый винт на оси Z и поднимаете шпиндель вверх, вес шпинделя может опустить шариковый винт вниз.
Чтобы предотвратить это, двигатель, соединенный с компонентом линейного перемещения, должен иметь достаточный удерживающий момент, чтобы предотвратить обратное движение нагрузки компонентов линейного перемещения.
Использование шагового двигателя с достаточным удерживающим моментом — простой и легкий способ добиться этого.
Сервоприводы могут выполнять такую же хорошую работу, но вам потребуется тщательно настроить контроллер, чтобы предотвратить ненужные вибрации и шум, которые могут повредить другие компоненты вашей сборки.
Шаговый двигатель с шариковым винтом
5. Входная мощность и эффективность
Шаговые двигатели работают от постоянного тока и обычно работают на полную мощность независимо от нагрузки. Шаговые двигатели имеют КПД около 70%.
С другой стороны, вы можете найти сервоприводы, которые работают от источника переменного или постоянного тока, и они потребляют мощность, пропорциональную нагрузке, которую они несут, поэтому сервоприводы могут давать 80-90% эффективности.
Энергопотребление — это фактор, который следует учитывать, когда вы работаете в производственной среде, и дополнительные деньги, которые вы тратите на сервоприводы, могут сэкономить вам деньги на счетах за электроэнергию.
Однако, если объемы вашего производства невелики, а нагрузки меньше, инвестиции в сервопривод не имеют реальной экономической выгоды, что делает шаговые двигатели лучшим выбором.
6. Точность и воспроизводимость
Разрешение двигателей с ЧПУ является фактором, влияющим на точность и повторяемость фрезерных станков с ЧПУ.
Как правило, разрешение шаговых двигателей зависит от количества шагов.
Типичный шаговый двигатель имеет 200 шагов, что означает, что он поворачивается на 1,8 градуса за каждый полученный импульс.
Если вы используете микрошаг, вы можете улучшить это разрешение. Например, если вы используете микрошаг 1/8, разрешение станет 0,225 градуса на 200-шаговом двигателе.
Кроме того, шаговые двигатели часто предпочитают из-за их простой конструкции и системы с разомкнутым контуром, которые практически не требуют настройки. Следовательно, они обеспечивают хорошую точность без особой настройки.
С другой стороны, сервоприводы используют энкодер для определения положения вала двигателя, а разрешение двигателя зависит от энкодера и способности контроллера точно регулировать напряжение и ток.
Например, если серводвигатель имеет разрешение 1000 импульсов/об, это показывает, что контроллер сможет определять каждые 0,36 градуса поворота вала двигателя.
Теоретически сервоприводы имеют бесконечное разрешение, но вам необходимо правильно настроить их и поддерживать энкодер и контроллер в хорошем состоянии для достижения очень высокой точности.
Для любительских приложений, где вам не требуется высокая точность и прецизионность, степперы являются вполне разумным выбором.
Однако шаговые двигатели могут пропускать шаги и вызывать ошибочные сокращения, когда они нагреваются из-за непрерывной работы.
Серводвигатели имеют лучшую точность позиционирования, чем шаговые двигатели.
Это связано с тем, что серводвигатели имеют замкнутый контур управления, что позволяет им корректировать свои движения.
Вы также можете получить хорошую повторяемость от серводвигателей, если они повернуты правильно. Их повторяемость также зависит от качества используемого энкодера.
Вращающийся энкодер для определения положения вала
7. Шум
Шум может быть проблемой при работе с ЧПУ.
Шаговые двигатели могут быть немного шумными по сравнению с серводвигателями.
Чтобы преодолеть это, вы можете использовать драйверы шаговых двигателей с поддержкой микрошагов, что помогает снизить уровень шума.
Вы можете найти шаговые драйверы, которые могут управлять микрошагом до 1/128, чтобы значительно снизить уровень шума и обеспечить плавное движение вала на низких скоростях.
Кроме того, микрошаг устраняет влияние резонансной частоты, которая вызывает вибрации в шаговых двигателях.
Однако микрошаг может создавать меньший крутящий момент, который может составлять около 70% крутящего момента, создаваемого при полношаговом управлении.
Вы можете использовать серводвигатели для устранения шума и вибраций двигателя, но вам все равно придется беспокоиться о шуме фрезерного станка/шпинделя.
Как правило, шум фрезера/шпинделя перевешивает все остальное, и это делает шум двигателя незначительным.
8. Срок службы и техническое обслуживание
Шаговые двигатели состоят из меньшего количества компонентов, и подшипник — единственная быстроизнашивающаяся деталь, которую можно заменить.
Серводвигатели используют энкодеры и редукторы в качестве основных компонентов, что делает их механически сложными.
Следовательно, шаговые двигатели требуют меньше обслуживания по сравнению с серводвигателями.
Однако шаговые двигатели более подвержены повреждениям из-за механических ошибок, таких как перегрузка и заедание, чем серводвигатели.
9. Стоимость
Стоимость часто является основной причиной выбора шаговых двигателей, а не сервоприводов.
Типичный сервопривод как минимум в три раза дороже шагового двигателя того же размера и мощности.
Это связано со сложностью его конструкции.
Шаговые двигатели используют систему без обратной связи и имеют простую конструкцию, исключающую сложность и дополнительную стоимость.
Кроме того, контроллеры серводвигателей используют сложные схемы для достижения высокой производительности.
Драйверы шаговых двигателей недороги по сравнению с сервоприводами из-за их простой конструкции и доступности.
В целом дополнительные компоненты и сложная система делают систему серводвигателя дорогостоящей.
Серводвигатель с драйвером
Однако в условиях промышленного производства дополнительные затраты оправдываются более высокой эффективностью системы серводвигателя.
Кроме того, сервоприводы производят детали, которые имеют меньше брака и сокращают потери сырья.
10. Заключение
Рассмотренные выше функции должны помочь вам решить, какой двигатель выбрать для настройки вашего фрезерного станка с ЧПУ.
В первую очередь, какой двигатель вы выберете, зависит от вашего бюджета и типа работы, которую вы будете выполнять.
На мой взгляд, для приложений, не требующих сверхвысокой точности, например, в деревообработке, шаговые двигатели — хороший выбор.
Для сравнения: в большинстве фрезерных станков с ЧПУ стоимостью менее 25 000 долларов используются шаговые двигатели, а не серводвигатели.
Шаговые двигатели обычно могут обеспечивать скорость подачи от 50 до 1000 дюймов в минуту, в то время как сервоприводы могут работать со скоростью более 2500 дюймов в минуту.
Если вам нужна очень высокая точность и высокая скорость производства, лучшим выбором будет сервопривод.
Вы также можете рассмотреть шаговый двигатель с обратной связью, который хорошо предотвращает ошибки из-за пропущенных шагов и может быть хорошим вариантом, когда вам нужно недорогое решение для работы с дорогими заготовками.
Часто задаваемые вопросы (FAQ)
Почему в большинстве фрезерных станков с ЧПУ вместо серводвигателей используются шаговые двигатели?
Шаговые двигатели имеют небольшую площадь и простую конструкцию, идеально подходящую для небольших приложений, таких как фрезерные станки с ЧПУ. Они также дешевле, чем серводвигатели.
Почему серводвигатели дороже шаговых двигателей?
В серводвигателях используются редкоземельные магниты, которые дороже, чем обычные магниты, используемые в шаговых двигателях. Серводвигатели также имеют энкодер или резольвер и редуктор. Следовательно, общая компоновка делает серводвигатели механически более сложными и более дорогими, чем шаговые двигатели.
Могу ли я самостоятельно заменить энкодер моего серводвигателя?
Самостоятельно заменить энкодер в серводвигателе очень сложно. Для этого требуется найти смещение между энкодером и положением ротора, и лучше всего это может сделать обученный обслуживающий персонал.
Могу ли я добавить внешний энкодер к своим шаговым двигателям?
Вы можете добавить внешние энкодеры к своим шаговым двигателям. Энкодер позволяет отслеживать положение и скорость вала двигателя. Добавление энкодера к шаговому двигателю оказывает значительное влияние на производительность двигателя.
Могу ли я модернизировать свой фрезерный станок с ЧПУ с помощью шагового двигателя с обратной связью?
Да. Но если вы используете драйвер шагового двигателя без обратной связи с шаговым двигателем с обратной связью, вы не сможете подключить энкодер двигателя к драйверу. Следовательно, вам также необходимо обновить драйвер шагового двигателя.
Выбор между серводвигателями и шаговыми двигателями
Лучший двигатель тот, который соответствует требованиям применения. Однако, когда и серводвигатели, и шаговые двигатели удовлетворяют основным требованиям приложения позиционирования, важно иметь более глубокое понимание этих двух технологий, чтобы принять взвешенное решение.
В этом сообщении блога мы обобщим различия между системами серводвигателей и системами шаговых двигателей, а затем покажем, как достижения в технологии шаговых двигателей сокращают разрыв.
Давайте начнем с быстрого сравнения двух моторных технологий.
Шаговые двигатели | Серводвигатели |
|
|
Плюсы | Плюсы |
|
|
| Минусы | Минусы |
|
|
Хотя в серводвигателях и шаговых двигателях для создания движения используются постоянные магниты в роторе и электромагниты в статоре, и в обоих случаях требуются приводные схемы, в их конструкции есть фундаментальные различия. В следующем разделе объясняется, как эти фундаментальные различия влияют на их производительность.
| Конструкция двигателя |
Шаговому двигателю можно дать команду переместиться в определенное положение, остановиться, затем удерживать, в то время как серводвигатель должен «отыскивать» целевое положение с обратной связью от энкодера и использовать «блокировку сервопривода» для создания удерживающего момента. Эта разница в производительности связана с наличием или отсутствием энкодера и количеством полюсов.
Обсуждаемые здесь полюса являются «магнитными полюсами» и могут быть определены как северные или южные магнитные полюса ротора. Эти полюса обеспечивают определенные стабильные точки остановки, в которых магнитный поток от статора будет взаимодействовать с ротором. Количество полюсов также определяет, сколько раз обмотки двигателя должны быть передвинуты за полный оборот.
Чтобы понять разницу в количестве полюсов между шаговыми двигателями и серводвигателями, нам нужно глубже изучить конструкцию каждого двигателя. На левом изображении ниже показана конструкция шагового двигателя, а на правом изображении ниже показана схема поперечного сечения ротора и статора.
Шаговый двигатель
В конструкции шагового двигателя используется аксиально намагниченный редкоземельный постоянный магнит, который зажат между двумя зубчатыми чашками ротора. При осевом намагничивании постоянного магнита зубья двух чашек ротора становятся магнитными полюсами противоположной полярности. Чашка ротора может иметь 50 или 100 зубьев, а две чашки ротора скошены на половину шага зубьев. Зубья обоих роторов показаны синим и красным на правом изображении выше (если смотреть со стороны вала). Для шагового двигателя каждый зубец на обоих роторах становится полюсом.
Серводвигатель
В конструкции серводвигателя (показан выше) вместо зубьев (показан ниже) используется радиально намагниченный ротор, что является основной причиной того, что серводвигатели имеют значительно меньше полюсов. Малое количество полюсов также требует использования обратной связи энкодера для минимизации ошибки, что увеличивает длину корпуса двигателя.
В конструкции серводвигателя обычно используется ротор с 2–8 полюсами и трехфазный статор (U, V, W). Его ротор намагничен в радиальном направлении с помощью сегментированных постоянных магнитов, а не в осевом направлении, как в шаговом двигателе. Пример 4-полюсного ротора с 6-полюсным статором показан справа. Как видите, у серводвигателя значительно меньше полюсов, чем у шагового двигателя. |
Серводвигатель занимает больше места из-за необходимости использования абсолютного энкодера. Меньшее количество полюсов дает ему возможность создавать высокоскоростной крутящий момент. Шаговый двигатель может работать в разомкнутом контуре без энкодера, поэтому он более компактен. Точность остановки серводвигателя зависит от его энкодера, а точность остановки шагового двигателя зависит от количества полюсов. Мы объясним больше.
| Точность остановки |
Одним из основных требований для позиционирования является точность остановки двигателя. И шаговый двигатель, и серводвигатель могут точно останавливаться.
Точность остановки шагового двигателя зависит от качества изготовления обмоток (электрических) и конструкции зубьев (механических), а точность серводвигателя зависит от точности сборки, разрешения энкодера и алгоритма.
Помните, что между ротором и статором есть очень тонкий воздушный зазор, и трение происходит только от его шарикоподшипников. Момент трения или гравитационная нагрузка могут изменить фактическое положение остановки, поэтому при перемещении из положения в положение возникает небольшая ошибка. Когда мы наносим на график ошибки, возникающие при вращении двигателей на 1 полный оборот, они выглядят так, как показано на графиках ниже.
| Серводвигатель | Шаговый двигатель |
Обратите внимание, что оба они обеспечивают точность останова около +/-0,02°, что ниже типичной спецификации точности повторного останова шагового двигателя, равной 3 угловым минутам, или +/-0,05°. В то время как серводвигатель может повысить точность остановки за счет увеличения разрешения энкодера, шаговый двигатель обеспечивает лучшую повторяемость с шагом 7,2° или почти идеальную повторяемость с шагом 360°.
Точность остановки шагового двигателя сильно зависит от характеристик его обмотки, точности конструкции ротора, а также количества зубцов/полюсов в его роторе. Точность остановки серводвигателя зависит от точности сборки, разрешения энкодера и алгоритма работы. В некотором смысле можно сказать, что шаговый двигатель «механически разработан» для приложений позиционирования, а серводвигатели «электрически спроектирован» для приложений позиционирования.
| Высокая скорость |
Серводвигатели обычно работают на более высоких скоростях, чем шаговые двигатели. На самом деле это означает, что серводвигатель будет выдавать больший крутящий момент при заданных оборотах, чем шаговый двигатель. Эта разница в характеристиках крутящего момента возникает из-за разницы в количестве полюсов, а также индуктивности обмотки между серводвигателем и конструкцией шагового двигателя.
Помните, что количество полюсов также влияет на то, сколько раз необходимо передвинуть обмотку двигателя для полного оборота двигателя? Для серводвигателя может потребоваться всего 12 циклов, чтобы продвинуть двигатель на полный оборот. Однако для двухфазного шагового двигателя требуется 200 циклов. На малых скоростях это не имеет существенного значения. Однако на больших скоростях водитель не сможет полностью запитать обмотки. Поскольку ток пропорционален крутящему моменту, кривая скорости крутящего момента падает на высоких скоростях.
Работу шаговых двигателей и серводвигателей можно лучше всего показать с помощью их кривых скорость-момент. Вот пример сравнения шагового двигателя размера NEMA 23 и серводвигателя аналогичного размера.
| Шаговый двигатель NEMA 23 | 200 Вт (1/4 л. с.) Серводвигатель 60 мм |
Высокий пусковой момент шагового двигателя помогает быстрее разогнать нагрузку из положения покоя, что идеально подходит для приложений пуска/останова. Крутящий момент серводвигателя начинается ниже в области непрерывного режима работы, и кривая становится более плоской по мере того, как она достигает высоких скоростей. Серводвигатель также предлагает ограниченную рабочую область, которая обеспечивает максимальный мгновенный крутящий момент, который можно использовать в течение короткого промежутка времени.
Большое количество полюсов шаговых двигателей позволяет им создавать высокий крутящий момент на низкой скорости и плавно работать на низкой скорости. Они могут быстро реагировать, точно позиционировать без энкодера и легко создавать удерживающий момент. Однако из-за высокой индуктивности обмотки, большого количества полюсов и высоких постоянных L/R крутящий момент падает в области высоких скоростей. Малое количество полюсов и малая индуктивность обмотки серводвигателей не создают высокого пускового момента, но позволяют поддерживать его во всем диапазоне скоростей. Поэтому серводвигатели могут обеспечивать более высокий крутящий момент на высоких скоростях.
| Обратная связь с обратной связью |
По определению, система серводвигателя должна работать с управлением по замкнутому контуру, а шаговый двигатель обычно работает с управлением без обратной связи. Серводвигатель использует обратную связь для управления положением, скоростью или крутящим моментом двигателя. Шаговый двигатель получает команду двигаться в определенное место в градусах без обратной связи, но может потерять синхронность из-за перегрузки.
Добавление обратной связи для сохранения синхронизма усложняет конструкцию драйвера и увеличивает количество компонентов. В дополнение к генератору импульсов, фазорегулятору и полевому транзистору из типичной системы шагового двигателя, система серводвигателя также содержит счетчик положения ротора, преобразователь F/V, усилитель тока, усилитель скорости, усилитель положения и счетчик отклонения. Все эти компоненты необходимы для работы двигателя в ПИД-контуре, где драйвер постоянно вычисляет ошибки и регулирует пропорциональные/интегральные/дифференциальные коэффициенты для коррекции на лету. Вот почему серводвигатели стоят дороже. Системы серводвигателей обычно оснащены такими функциями, как автонастройка, поскольку обратная связь с обратной связью расширяет возможности двигателя. Например, системы серводвигателей серии NX предлагают четыре режима работы: управление положением, управление скоростью, управление крутящим моментом и управление натяжением.
| Система сервопривода | Шаговый двигатель |
Наряду с замкнутой обратной связью также увеличивается отношение нагрузки к моменту инерции ротора. Шаговый двигатель может работать с инерцией ротора примерно в 10 раз, а шаговый двигатель с замкнутым контуром может работать с инерцией ротора в 30 раз.
Шаговые двигатели работают без обратной связи, поэтому для их работы требуется меньше компонентов. Вот почему они более рентабельны. Серводвигатели требуют обратной связи и работают в ПИД-контуре, поэтому требуется больше компонентов. Системы с замкнутым контуром могут предложить преимущества, которых нет у систем с открытым контуром.
| Эффективность |
Обратная связь с обратной связью обеспечивает более эффективное управление током, что влияет на температуру и производительность двигателя.
На приведенном ниже графике показано повышение температуры в зависимости от рабочего цикла [%] двигателя. Обратите внимание, как повышается температура при рабочем режиме. Это важно, поскольку срок службы двигателя определяется сроком службы смазки подшипников, а срок службы смазки подшипников зависит от температуры.
В большинстве шаговых двигателей используется технология драйвера прерывателя тока, которая обеспечивает постоянную подачу тока независимо от нагрузки. Ток пропорционален температуре, поэтому рабочий цикл шагового двигателя должен быть ограничен примерно 50%. Серводвигатель предлагает более эффективное управление током, потому что он использует только тот ток, который ему нужен. Одна вещь, в которой шаговый двигатель лучше, — это его способность генерировать удерживающий момент на нулевой скорости. Серводвигатели потребляют больше энергии для создания удерживающего момента.
Эффективное управление током также может привести к другим преимуществам производительности, таким как снижение уровня шума и вибрации. Убедитесь, что ваш двигатель имеет правильный размер. Шаговые двигатели, как правило, больше вибрируют, если они имеют неправильный размер. Серводвигатели имеют тенденцию «рыскать» больше, если они неправильно подобраны или настроены.
В шаговых двигателях обычно используется технология управления прерывателем постоянного тока, и они постоянно работают на полном токе. Серводвигатели потребляют только ток, необходимый для профиля движения и нагрузки. Поскольку ток пропорционален температуре, это приводит к увеличению рабочих циклов и увеличению срока службы серводвигателя.
Возможность потреблять только необходимый ток является большим преимуществом систем серводвигателей, которые также могут помочь увеличить срок службы, снизить уровень шума для определенных приложений или снизить энергопотребление. Чтобы шаговый двигатель обеспечивал такой же эффективный контроль тока, ему потребуется больше обратной связи, что требует замыкания контура.
| Сводка |
Чтобы помочь с выбором продукта, мы составили список различий между сервоприводами и шаговыми двигателями.
| Заключительные мысли… |
Выбор продукта — это постоянный баланс между стоимостью и производительностью. Серводвигатели , безусловно, являются мощным двигателем среди электродвигателей. «Сделайте правильный выбор сегодня, чтобы не жалеть завтра.» |
Темы:
Шаговые двигатели,
абсолютное позиционирование,
Гибридное управление Alphastep,
Серводвигатели,
Сеть,
Срок службы
Шаговый двигатель или серводвигатель: что подходит для вашего приложения?
В условиях современного промышленного рынка выбор двигателя, подходящего для применения, может быть очень трудным и запутанным. Доступно несколько вариантов двигателей: асинхронные, синхронные реактивные, шаговые и серводвигатели.
В дополнение ко всем вариантам двигателя, информация о каждом из них обычно либо слишком базовая, либо слишком техническая, чтобы быть полезной. Этот пост предназначен для разъяснения различий между шаговыми двигателями и серводвигателями, а также того, когда уместно использовать каждую технологию.
Что такое шаговый двигатель?
Шаговый двигатель — это тип бесщеточного двигателя постоянного тока. Шаговые двигатели предназначены для обеспечения определенного количества определенных шагов за один оборот. Например, двигатель с 200 шагами/оборот будет обеспечивать разрешение положения 1,8°/импульс (360°/200 импульсов). Каждый раз, когда шаговый контроллер дает импульс двигателю, он будет двигаться в прямом или обратном направлении в зависимости от количества полученных импульсов. В нашем примере с шаговым двигателем 100 импульсов заставят двигатель повернуться на 180°.
Pros
Шаговый двигатель может обеспечивать позиционирование без обратной связи, что является большим преимуществом по сравнению с асинхронными двигателями без обратной связи, которые не могут обеспечивать позиционирование. Большинство шаговых двигателей не имеют обратной связи, что снижает общую стоимость шагового двигателя и системы управления. Их низкая стоимость является большой причиной их широкого использования.
Одним из преимуществ промышленного применения является то, что шаговый двигатель может работать с шаговым приводом постоянного тока. Для них не требуются более крупные инверторы с входным напряжением 230/460 В переменного тока, а также громоздкие предохранители и кабели. Это может иметь большое значение для многоосевых приложений.
Вход постоянного тока Шаговые приводы очень компактны и могут быть установлены даже на DIN-рейку в электрическом шкафу.
Минусы
Степпер может «потерять» положение. Это может произойти, если шаговый двигатель не обеспечивает достаточный крутящий момент для перемещения вала и нагрузки. Это также может произойти на высоких скоростях, когда шаговый двигатель работает слишком быстро, чтобы зафиксироваться на каждом шаге. Кроме того, это может произойти, если инерция груза уносит его за пределы предполагаемого шага, когда он остановлен. Если точность положения шагового двигателя имеет решающее значение, некоторые двигатели будут добавлять обратную связь, например, инкрементный энкодер. Обратная связь определяет, отличается ли фактическое положение вала от ожидаемого положения, и двигатель может при необходимости скорректировать это положение. Исключением является случай, когда крутящий момент нагрузки превышает номинальный крутящий момент шагового двигателя. В этом случае мотор заглохнет и не сможет себя исправить.
Шаговые приводы KEB с креплением на DIN-рейку имеют обратную связь с инкрементным энкодером.
Шаговые двигатели не сохраняют известное положение при отключении питания. Поэтому им необходимо выполнять процедуру возврата каждый раз, когда они включаются. Это можно увидеть, включив принтер дома. Вы увидите, как двигатели завершат процедуру, которая сбрасывается в известное «исходное» положение.
Короче говоря, шаговые двигатели идеально подходят для самых разных отраслей промышленности и маломощных приложений, от 3D-принтеров до регулируемых конвейеров и небольших насосов-дозаторов.
Что такое серводвигатель?
В то время как серводвигатели просто означают двигатель, управляемый с обратной связью, в мире автоматизации принято специально обозначать синхронный двигатель переменного тока с постоянными магнитами. Эти двигатели имеют статор, аналогичный асинхронному двигателю, но их роторы изготовлены из редкоземельных магнитов. Это устраняет скольжение, присутствующее в асинхронных двигателях, и позволяет серводвигателю работать с синхронной скоростью, определяемой частотой и количеством полюсов (об/мин = 120 * частота № полюсов).
Pros
В серводвигателях переменного тока используются постоянные магниты из редкоземельных металлов, поэтому они обеспечивают лучшую в своем классе плотность крутящего момента. Это предпочтительнее для очень динамичных двигателей, которые должны быстро разгоняться и замедляться. Серводвигатели включают некоторую обратную связь, будь то резольвер или энкодер. Обратная связь от вала имеет решающее значение, поскольку она используется в сервоконтроллере для управления положением ротора и крутящим моментом.
В отличие от шагового двигателя, серводвигатели способны обеспечивать мгновенный пиковый крутящий момент во всем диапазоне скоростей. Пиковый крутящий момент серводвигателя может быть очень важным в определенных приложениях и может привести к оптимальному выбору двигателя. Кроме того, серводвигатели переменного тока работают на гораздо более высоких скоростях по сравнению с шаговыми двигателями.
Серводвигатели обеспечивают высокий пиковый крутящий момент при нулевой скорости.
Критические приложения управления движением, которые связаны с функциональной безопасностью и обращением с критически важными или дорогостоящими продуктами (например, полупроводниковыми машинами), должны использовать серводвигатели с обратной связью. Низкая стоимость шагового двигателя/системы управления просто не оправдывает риск получения травмы или выхода из строя продукта. Типичными примерами их наилучшего использования являются упаковочные машины, погрузочно-разгрузочные работы, робототехника и многое другое.
Наконец, серводвигатели KEB могут быть оснащены абсолютными энкодерами. Абсолютные энкодеры сохраняют информацию о своем положении даже при отключении питания системы. Это может быть очень важно в приложениях, где перенастройка невозможна из-за.
Серводвигатели KEB могут быть оснащены многооборотными абсолютными энкодерами, которые сохранят положение системы даже при отключении питания. связанный диск, который управляет им. Это особенно актуально для приложений с меньшей мощностью (например, 500 Вт и ниже). Если приложение не требует точности и высокой перегрузки по крутящему моменту, которые предлагает серводвигатель, то, вероятно, лучшим выбором будет шаговый двигатель.
Серводвигатели хорошо подходят для целого ряда отраслей и областей применения, приводя в действие конвейерные системы для упаковочных машин, станков для резки и формовки металла и робототехники.
Что предлагает KEB?
KEB предлагает ряд продуктов для шаговых и серводвигателей. Что касается шагового двигателя, модуль шагового привода KEB обеспечивает управление шаговыми двигателями до 5 А с использованием профилей управления движением CiA 402. Шаговый привод EtherCAT
KEB использует профили движения CiA 402.
Между тем, KEB предлагает как серводвигатели, так и приводы для управления ими. Серводвигатели KEB имеют скорость до 9000 об/мин и номинальный крутящий момент до 70 Нм. Для управления двигателями приводы S6 и F6 сочетают в себе гибкость и производительность, что делает их идеальными для сервосистем.