|
Регулятор частоты вращения двигателя Регулятор частоты вращения двигателя, стабилизирующий его скорость при изменении нагрузки, существенно повышает эксплуатационные возможности таких бытовых приборов, как электродрель, электропила, кухонный комбайн и г. д. Известен простой и эффективный однополупериодный регулятор коллекторного электродвигателя последовательного возбужде-ния, стабилизирующий скорость вращения за счет обратной связи по величине противо-ЭДС, возникающей на роторе двигателя и зависящей от его нагрузки. К сожалению, такому регулятору свойствен существенный недостаток — в нем используется высокочувствительный тиристор с током открывания менее 100 мкА. Подобрать ему замену практически невозможно. В публикуемой статье автор предлагает свой вариант схемотехнического решения регулятора, в котором сняты ограничения на параметры тиристора. Прежде чем перейти к описанию модернизированного регулятора электропривода, остановимся коротко на принципе действия простого регулирующего устройства [1]. Его принципиальная схема приведена на рис, 1, Это — мост, левое плечо которого образовано делителем напряжения сети R1 — R2C1 —VD1, а правое—тиристором VS1 и двигателем М1. Управляющий переход тиристора включен е диагональ моста. Открывающий тиристор сигнал представляет собой сумму складывающихся в противофаэе сигналов; напряжения сети, устанавливаемого движком резистора R2f и противо-ЭДС с ротора электродвигателя- При неизменности напряжений мост сбалансирован и частота вращения двигателя также не меняется. Увеличение нагрузки на валу двигателя снижает его обороты и уменьшает соответственно величину противо-ЭДС, что приводит к разбалансу моста, В результате сигнал, поступающий на управляющий переход тиристора, возрастает, и в следующем положительном полупериоде он открывается с меньшей задержкой, увеличивая таким образом подводимую к двигателю мощность. В итоге снижение частоты вращения двигателя из-за увеличения нагрузки оказывается существенно меньшим, чем было бы при отсутствии регулятора. Однополупериодный режим двигателя приводит к снижению отдаваемой мощности. Для достижения максимальных мощности и скорости следует зашунтировать тиристор, нажав на кнопку SA1. В этом случае на двигатель будут подаваться обе полуволны сетевого напряжения. Как уже указывалось, основной недостаток рассмотренного регулятора состоит в необходимости использования высокочувствительного тиристора с током открывания менее 100 мкА, который практически нечем заменить. Введение транзисторного аналога тиристора позволяет снять ограничения на параметры открывания VS1 при сохранении тех же регулировочных характеристик. Установка стабилитрона в делитель напряжения сети понижает изменения скорости двигателя при колебаниях питающего напряжения. Схема модернизированного регулятора представлена на рис, 2. Как и рассмотренное выше устройство, регулятор работает только при положительной полуволне сетевого напряхения. Напряжение рассогласования моста через диод VD2 и резистор R10 поступает к переходу база — эмиттер транзистора VT2, Чувствительность данного устройства и качество его регулирования выше, так как напряжение открывания транзисторов существенно меньше* чем у тиристоров. Ток управления по аналогии с регулятором, представленным на рис. 1, выбран равным 0,1 мА путем шунтирования перехода транзистора резистором R7. Если напряжение, поступающее с движка резистора R2, выше напряжения на роторе двигателя, то транзистор VT2 открывается и открывает VT1, Эти приборы образуют аналог тиристора и при включении формируют мощный импульс разрядного тока конденсатора СЗ, который через токоограничивающий резистор R9 поступает на управляющий электрод симистора VS1, Симистор включается, на двигатель подается напряжение, и число его оборотов увеличивается. Накопительный конденсатор СЗ заряжается от сети через резистор R5. Стабилитрон VD4 ограничивает напряжение на конденсаторе на уровне, несколько превышающем возможное напряжение открывания симисторов или тиристоров. Кроме того, стабилитрон исключает появление обратного напряжения на транзисторах усилителя. Конденсатор С4, помимо снижения помех от искрения щеток двигателя, выполняет функцию интегрирования в цепи обратной связи. Увеличение его емкости повышает устойчивость регулятора, что бывает нужно в случае плохого контакта щеток, сопровождающегося их сильным искрением, или при установке предельно малых скоростей, когда может возникнуть так называемое «качание» оборотов. Однако следует помнить, что с увеличением емкости конденсатора С4 динамические характеристики привода ухудшаются и качество стабилизации скорости снижается. Постоянная цепи R5C3 такова, что конденсатор СЗ заряжается быстрее заряда конденсатора C4. Особенность описываемого регулятора заключается в применении симистора. Дело в том, что коммутация максимальной скорости замыканием цепи «анод-катод» предполагает наличие контактов SA1 мгновенного действия с достаточной разрывной мощностью. При ином исполнении контактов в них может возникать искрение или электрическая дуга. Послед няя крайне нежелательна, так как приводит к подгару контактов и печатной платы и, следовательно, пожароопасна. Симис-тор позволяет перенести коммутацию в цепь управляющего электрода, что полностью исключает искрение в контактах, упрощает их конструкцию и привязку к регулировочному резистору R2. При регулировании симистор работает как тиристор, а при замыкании контактов пропускает на двигатель переменный ток. Во время разработки регулятор испытывался с различными коллекторными электродвигателями: ДК77 (для бытовых электроприборов и электроинструмента), МШ-2 (для швейных машин) и даже с двигателем параллельного возбуждения СЛ261М. Управление такими существенно различными двигателями не потребовало внесения каких-либо изменений в регулятор. При использовании двигателя с параллельным возбуждением следует иметь в виду, что его статорная обмотка должна запитываться от отдельного внешнего источника и притом до подачи напряжения через регулятор на якорь. Возможности регулятора иллюстрируют нагрузочные характеристики (сплошной линией без VD1, штриховой с VD1), снятые с двигателем ДК77-280-12 при устанавливаемой на холостом ходу скорости 1500 об/мин и различном напряжении сети (рис, 3). При незначительном усложнении относительно прототипа регулятор совершенно некритичен к разбросу параметров элементов. В качестве симисторов применимы ТС, ТС2, 2ТС112иТС106 на токи 6,3-10-16 А, а также КУ208Г или 2У208Гна 5 А. Можно также использовать тиристоры КУ201Л, 2У201Л, КУ202Н-М, 2У202Н-М, КУ228И и другие при условии установки замыкателя по цепи «анод-катод». Необходимость теплоотвода определяется величиной тока нагрузки. Транзисторы должны допускать ток не ниже 250 мА и напряжение не менее 15В, Функции VT1 могут выполнять КТ350А, КТ209 (А-М), КТ501А, КТ502А (Б-Е), КT661A, КТ681А и другие, a VT2 — КT503A (Б-Е), КТ645А, КТ660А (Б), КТ684А (Б) и другие с аналогичными характеристиками. Диоды могут быть на ток не ниже 10 мА и напряжение не менее 400 В —КД105(Б-Г), КД209 (А-В), КД221 (В-Г), КД226 (В-Д), Д209,Д210,Д211,Д226,Д237(Б-В). При налаживании регулятора движок резистора R2 следует установить в нижнее по схеме положение и подстроенным резистором R3 выставить желаемую минимальную скорость вращения двигателя. Далее, изменяя положение движка резистора R2, следует проверить изменение оборотов от минимальных до максимальных, отсутствие «качания» оборотов на минимальной скорости без нагрузки, отсутствие «провала» в оборотах на максимальной скорости однополупериодного режима под нагрузкой, а также срабатывание контактов максимальной скорости. Качание устраняется увеличением емкости конденсатора С4, а провал — увеличением сопротивления резистора R1, после чего вновь уточняют положение движка резистора R3.
В. ЖГУЛЕВ
|
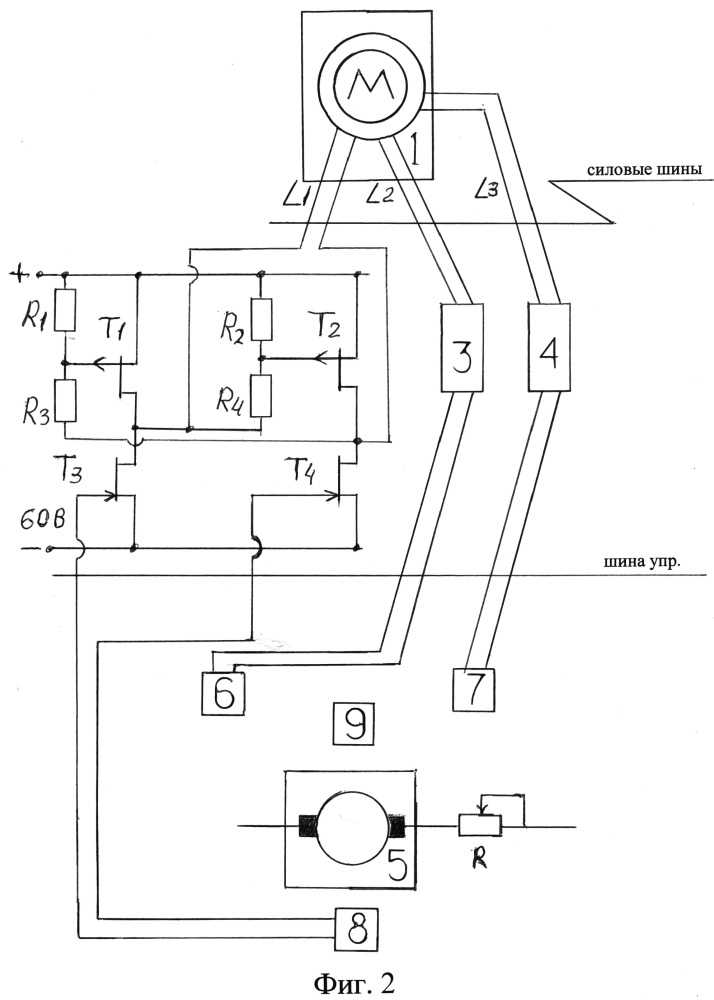 поскольку сравнение напряжений от резистора R2 и противр-ЭДС возможно только при отсутствии тока через двигатель. Конденсатор С1 в делителе напряжения сети расширяет зону регулирования в сторону малых скоростей, а конденсатор С2 в цепи управляющего электрода тиристора понижает чувствительность регулятора к искрению щеток двигателя.
поскольку сравнение напряжений от резистора R2 и противр-ЭДС возможно только при отсутствии тока через двигатель. Конденсатор С1 в делителе напряжения сети расширяет зону регулирования в сторону малых скоростей, а конденсатор С2 в цепи управляющего электрода тиристора понижает чувствительность регулятора к искрению щеток двигателя.
 Если же напряжение на резисторе R2 ниже, чем на роторе двигателя, симистор не включится, число оборотов сократится.
Если же напряжение на резисторе R2 ниже, чем на роторе двигателя, симистор не включится, число оборотов сократится.
 Это сделано для того, чтобы в любой возможный момент открывания транзистора VT2 на конденсаторе СЗ уже присутствовало рабочее напряжение, необходимое для выработки пускового импульса. Иногда такое условие может быть нарушено при резком разбалансе моста — при заторможенном двигателе (низкое сопротивление ротора) и максимальном напряжении на движке резистора R2 (большой открывающий ток с делителя). В результате транзисторы открываются до завершения зарядки конденсаторе СЗ, напряжение на нем отсутствует, импульс разрядного тока не формируется. Ток, протекающий через резистор R5, достаточен для удержания открытого состояния транзисторов, но мал для включения симистора, и поэтому двигатель не вращается. Подобную возможность можно расценить как положительную, поскольку в этом случае и при заклинивании привода двигатель отключается, Если же она нежелательна, ее устраняют некоторым снижением сопротивлений резисторов R5 — R7 и (или) повышением сопротивления резистора R1. Величина и форма напряжения на резисторе R2 практически не зависят от изменения сетевого напряжения благодаря наличию ограничителя R4 — VD1.
Это сделано для того, чтобы в любой возможный момент открывания транзистора VT2 на конденсаторе СЗ уже присутствовало рабочее напряжение, необходимое для выработки пускового импульса. Иногда такое условие может быть нарушено при резком разбалансе моста — при заторможенном двигателе (низкое сопротивление ротора) и максимальном напряжении на движке резистора R2 (большой открывающий ток с делителя). В результате транзисторы открываются до завершения зарядки конденсаторе СЗ, напряжение на нем отсутствует, импульс разрядного тока не формируется. Ток, протекающий через резистор R5, достаточен для удержания открытого состояния транзисторов, но мал для включения симистора, и поэтому двигатель не вращается. Подобную возможность можно расценить как положительную, поскольку в этом случае и при заклинивании привода двигатель отключается, Если же она нежелательна, ее устраняют некоторым снижением сопротивлений резисторов R5 — R7 и (или) повышением сопротивления резистора R1. Величина и форма напряжения на резисторе R2 практически не зависят от изменения сетевого напряжения благодаря наличию ограничителя R4 — VD1. В результате колебания питающего напряжения не приводят к нестабильности устанавливаемого фазового угла открывания симистара. Существенно снижается и нестабильность по напряжению сети устанавливаемой скорости двигателя. При неизменном фазовом угле скорость меняется только за счет изменения амплитуды напряжения на двигателе.
В результате колебания питающего напряжения не приводят к нестабильности устанавливаемого фазового угла открывания симистара. Существенно снижается и нестабильность по напряжению сети устанавливаемой скорости двигателя. При неизменном фазовом угле скорость меняется только за счет изменения амплитуды напряжения на двигателе.
 Транзисторы во время открытого состояния симистора блокируются и не функционируют.
Транзисторы во время открытого состояния симистора блокируются и не функционируют.
 В результате он открывается через период и возникает «провал-(уменьшение) скорости в верхнем положении движка резистора R2, Это явление устраняется увеличением сопротивления резистора R1.
В результате он открывается через период и возникает «провал-(уменьшение) скорости в верхнем положении движка резистора R2, Это явление устраняется увеличением сопротивления резистора R1.
 Этот двигатель мощностью 400 Вт при скорости 1200 об/мин легко тормозится положенной на его вал рукой вплоть до полной остановки в том случае, если питание на чего подавать через автотрансформатор, устанавливая на холостом ходу ту же скорость 1500 об/мин.
Этот двигатель мощностью 400 Вт при скорости 1200 об/мин легко тормозится положенной на его вал рукой вплоть до полной остановки в том случае, если питание на чего подавать через автотрансформатор, устанавливая на холостом ходу ту же скорость 1500 об/мин.
 Стабилитрон VD1 подойдет на напряжение стабилизации 120…180 В (КС630А, КС650А, KC680A, 2C920A, 2C950A, 2С980А) и может быть заменен цепочкой последовательно включенных маломощных стабилитронов на суммарное напряжение 150 В. Стабилитрон VD4 — любой маломощ-ный с напряжением стабилизации 9…11 В, кроме термокомпенсированных. Конденсаторы С1—С4 — керамические КМ, КМ-6, К10-17 или пленочные К73-17. Конденсаторы С5, С6 — К73-17 с номинальным напряжением 630 В (конденсаторы иных типов и К73-17 на меньшее номинальное напряжение использовать нельзя).
Стабилитрон VD1 подойдет на напряжение стабилизации 120…180 В (КС630А, КС650А, KC680A, 2C920A, 2C950A, 2С980А) и может быть заменен цепочкой последовательно включенных маломощных стабилитронов на суммарное напряжение 150 В. Стабилитрон VD4 — любой маломощ-ный с напряжением стабилизации 9…11 В, кроме термокомпенсированных. Конденсаторы С1—С4 — керамические КМ, КМ-6, К10-17 или пленочные К73-17. Конденсаторы С5, С6 — К73-17 с номинальным напряжением 630 В (конденсаторы иных типов и К73-17 на меньшее номинальное напряжение использовать нельзя).
 Между резистором R2 и подвижным контактом находится переходная пластмассовая втулка с кулачком, обеспечивающим замыкание подвижного контакта со стойкой в верхнем по схеме положении переменного резистора R2.
Между резистором R2 и подвижным контактом находится переходная пластмассовая втулка с кулачком, обеспечивающим замыкание подвижного контакта со стойкой в верхнем по схеме положении переменного резистора R2.
 По этой причине качество регулирования напрямую зависит от указанных характеристик применяемого двигателя. Однако предельная простота устройства управления и хорошие нагрузочные характеристики вполне компенсируют этот недостаток.
По этой причине качество регулирования напрямую зависит от указанных характеристик применяемого двигателя. Однако предельная простота устройства управления и хорошие нагрузочные характеристики вполне компенсируют этот недостаток.
Регулятор частоты вращения коленчатого вала дизельного двигателя
В отличие от бензинового двигателя дизельные двигатели не имеет во впускном трубопроводе дроссельной заслонки, позволяющей четко регулировать частоту вращения коленчатого вала за счет изменения подачи воздуха с одновременным изменением подачи топлива. У дизельного двигателя не существует положения управляющей рейки, которое бы позволило двигателю поддерживать определенную частоту вращения коленчатого вала двигателя без помощи регулятора. Например, при запуске холодного двигателя и его работе на холостом ходу, потери на трение кривошипно-шатунного, газораспределительного и других механизмов и приводимых от двигателя агрегатов начинают снижаться, а количество подаваемого топлива будет постоянным. При отсутствии регулятора частота вращения будет увеличиваться и может достичь критической точки, при которой может произойти разрушение двигателя.
При отсутствии регулятора частота вращения будет увеличиваться и может достичь критической точки, при которой может произойти разрушение двигателя.
Регуляторы частоты вращения коленчатого вала дизельного двигателя устанавливаются на насосе высокого давления и приводятся в действие от кулачкового вала. Его работа основана, как и в автоматической муфте опережения впрыска, на использовании центробежных сил. Например, при заданном положении педали управления подачи топлива и возникновении дополнительного сопротивления движению (на подъеме) частота вращения коленчатого вала двигателя будет уменьшаться, а скорость автомобиля падать. Чтобы ее поддержать на заданном уровне, необходимо повысить крутящий момент двигателя. Это может быть достигнуто увеличением количества топлива, впрыскиваемого в цилиндры двигателя. Регулятор воспринимает снижение частоты вращения коленчатого вала и автоматически увеличивает подачу топлива насосом высокого давления, благодаря чему скорость автомобиля восстанавливается до заданного значения.
Аналогичным образом регулятор изменяет подачу топлива при уменьшении нагрузки на двигатель, только в этом случае управляющее воздействие регулятора сводится к уменьшению количества впрыскиваемого топлива. В результате при снижении нагрузки на двигатель происходит уменьшение скорости движения и доведение ее до заданного уровня. Таким образом, регулятор автоматически изменяет подачу топлива при изменении нагрузки на двигатель и обеспечивает установку любого выбранного скоростного режима при отклонениях от него в пределах – 10…20%.
Различают двухрежимный и всережимные регулятора частоты вращения коленчатого вала.
Двухрежимный регулятор (типа RQ) поддерживающий определенную частоту вращения коленчатого вала на режимах минимальной и максимальной частоты вращения коленчатого вала. Всережимный регулятор (типа RSV) поддерживает необходимую частоту вращения на всех режимах работы двигателя.
Всережимные регуляторы устанавливаемые на небольших высокооборотистых двигателях позволяют поддерживать частоту вращения коленчатого вала в пределах 6…10%.
В топливных насосах применяют регуляторы с различными принципами работы:
- механические
- пневматические
- гидравлические
- комбинированные
Для автомобильных двигателей наиболее широко применяют механические центробежные регуляторы и реже пневматические регуляторы.
Центробежный регулятор представляет собой систему, состоящую из вращающихся грузов, пружин и рычагов, связанных с рейкой топливного насоса высокого давления, управляющей цикловой подачей топлива.
Двурежимный регулятор
В двухрежимных регуляторах механизм регулятора связан с рейкой насоса высокого давления при помощи дифференциального рычага, соединенного также и с тягой педали акселератора, которой управляет водитель. Основными элементами двухрежимного центробежного регулятора являются большие 4 и малые 3 грузы.
Рис. Схема работы двухрежимного центробежного регулятора
Грузы свободно посажены на пальцы крестовины 1 и упираются лапками в скользящую муфту 5, также свободно установленную на вращающемся валу 6 регулятора, связанном зубчатой передачей с валом топливного насоса. С противоположной стороны в скользящую муфту под действием слабой пружины 12, помещенной в стакане 13 и втулке 11, упирается основной (вильчатый) рычаг 7 регулятора. Этот рычаг соединен при помощи двуплечего рычага 8 с рейкой 9 топливного насоса высокого давления и тягой 14 педали акселератора. Сильная пружина 10, установленная на втулке 11, упирается в неподвижную стенку корпуса регулятора. Грузы со слабой пружиной и сильной пружинами образуют две последовательно действующие системы регулирования, в которых используется общий рычажный механизм.
С противоположной стороны в скользящую муфту под действием слабой пружины 12, помещенной в стакане 13 и втулке 11, упирается основной (вильчатый) рычаг 7 регулятора. Этот рычаг соединен при помощи двуплечего рычага 8 с рейкой 9 топливного насоса высокого давления и тягой 14 педали акселератора. Сильная пружина 10, установленная на втулке 11, упирается в неподвижную стенку корпуса регулятора. Грузы со слабой пружиной и сильной пружинами образуют две последовательно действующие системы регулирования, в которых используется общий рычажный механизм.
Массы грузов и затяжку слабой пружины подбирают так, чтобы действующие на муфту составляющие центробежной силы грузов и силы пружины оказались равными, т.е. чтобы система была в равновесии при минимальной частоте вращения коленчатого вала. Педаль акселератора во время работы двигателя на холостом ходу с минимальной частотой вращения коленчатого вала полностью отпущена и двуплечий рычаг находится в положении I. При самопроизвольном уменьшении частоты вращения коленчатого вала двигателя центробежная сила грузов уменьшается и пружина 12, отклоняя вильчатый рычаг, перемещает рейку топливного насоса в сторону увеличения подачи топлива. В случае самопроизвольного повышения частоты вращения коленчатого вала двигателя центробежная сила грузов увеличивается и муфта 5, отклоняя вильчатый рычаг и сжимая при этом пружину 12, перемещает рейку насоса в сторону уменьшения подачи топлива. Таким образом, одна система двухрежимного регулятора обеспечивает устойчивую работу дизеля при минимальной частоте вращения коленчатого вала на холостом ходу.
В случае самопроизвольного повышения частоты вращения коленчатого вала двигателя центробежная сила грузов увеличивается и муфта 5, отклоняя вильчатый рычаг и сжимая при этом пружину 12, перемещает рейку насоса в сторону уменьшения подачи топлива. Таким образом, одна система двухрежимного регулятора обеспечивает устойчивую работу дизеля при минимальной частоте вращения коленчатого вала на холостом ходу.
Массу грузов и затяжку сильной пружины подбирают так, чтобы равновесие системы обеспечивалось при максимальной частоте вращения коленчатого вала, допустимом для данного двигателя. Педаль акселератора при работе двигателя с максимальной частотой вращения коленчатого вала полностью нажата, и двуплечий рычаг находится в положении II. При этом большие грузы регулятора раздвигаются до упоров 2 и не изменяют своего положения, сжимая слабую пружину вильчатым рычагом настолько, что стакан 13 вдвигается до упора в торец втулки 11.
С дальнейшим увеличением частоты вращения коленчатого вала, которое может происходить при уменьшении нагрузки дизеля, центробежная сила грузов увеличивается и муфта 5, отклоняя вильчатый рычаг и сжимая при этом пружину 10, перемещает рейку насоса высокого давления в сторону уменьшения подачи топлива. Таким образом, вторая система двухрежимного регулятора ограничивает максимальную частоту вращения, не допуская его разноса, даже при его полной разгрузке.
Таким образом, вторая система двухрежимного регулятора ограничивает максимальную частоту вращения, не допуская его разноса, даже при его полной разгрузке.
На рисунке приведены скоростные характеристики дизеля с двухрежимным регулятором.
Рис. Характеристики дизеля с двухрежимным регулятором:
Мкр – крутящий момент; Nе – мощность; n – частота вращения коленчатого вала
Кривые 1, 2 и 3 соответствуют различным положениям педали акселератора. Участок n1…n2 регулируется системой минимальной, а участок n3…n4 системой максимальной частоты вращения регулятора. В диапазоне между этими участками режим работы двигателя управляется только педалью акселератора без воздействия регулятора.
Центробежный регулятор всережимного типа
Центробежный регулятор всережимного типа также представляет собой систему, состоящую из вращающихся грузов, пружины и основного рычага, связанного с рейкой топливного насоса высокого давления, управляющей цикловой подачей топлива. Особенность регулятора этого типа заключается в отсутствии непосредственной связи рейки топливного насоса с педалью акселератора. На рисунке дана схема всережимного центробежного регулятора.
Особенность регулятора этого типа заключается в отсутствии непосредственной связи рейки топливного насоса с педалью акселератора. На рисунке дана схема всережимного центробежного регулятора.
Рис. Схема работы всережимного центробежного регулятора
На вращающемся валу 9 регулятора, который при помощи шестерен связан с кулачковым валом топливного насоса, закреплена крестовина 6. В проушинах крестовины на пальцах 7 установлены качающиеся грузы 8 с лапками, которые упираются в подвижную муфту 10, надетую на вал регулятора. С другой стороны в муфту упирается основной вильчатый рычаг 2, установленный на оси 11 и соединенный с пружиной 3 и рейкой 1 топливного насоса высокого давления. Другой конец пружины соединен с рычагом 4, жестко связанным общей осью с рычагом 5 управления регулятором, который размещен с наружной стороны корпуса регулятора.
Система находится в равновесии, когда составляющие центробежной силы вращающихся грузов и силы пружины, действующие на подвижную муфту, равны между собой. При повышении частоты вращения коленчатого вала двигателя и связанного с ним вала регулятора, происходящем при уменьшении нагрузки, центробежная сила грузов увеличивается, заставляя их раздвинуться и переместить подвижную муфту, вильчатый рычаг и связанную c ним рейку топливного насоса в сторону уменьшения подачи топлива. В случае понижения частоты вращения, происходящем при увеличении нагрузки дизеля, центробежная сила грузов уменьшается и пружина, воздействуя на вильчатый рычаг, перемещает рейку топливного насоса в сторону увеличения подачи топлива. Частоту вращения изменяют натяжением пружины, связанной с рычагом управления регулятором, причем для повышения частоты вращения коленчатого вала необходимо увеличить натяжение пружины.
При повышении частоты вращения коленчатого вала двигателя и связанного с ним вала регулятора, происходящем при уменьшении нагрузки, центробежная сила грузов увеличивается, заставляя их раздвинуться и переместить подвижную муфту, вильчатый рычаг и связанную c ним рейку топливного насоса в сторону уменьшения подачи топлива. В случае понижения частоты вращения, происходящем при увеличении нагрузки дизеля, центробежная сила грузов уменьшается и пружина, воздействуя на вильчатый рычаг, перемещает рейку топливного насоса в сторону увеличения подачи топлива. Частоту вращения изменяют натяжением пружины, связанной с рычагом управления регулятором, причем для повышения частоты вращения коленчатого вала необходимо увеличить натяжение пружины.
На рисунке приведены скоростные характеристики дизеля с всережимным регулятором частоты вращения.
Рис. Характеристики дизеля с всережимным регулятором:
Мкр – крутящий момент; Nе – мощность; n – частота вращения коленчатого вала
Каждому положению рычага управления регулятором соответствует определенная ветвь кривой – А1В1, А2В2 и т. д., характеризующая зависимость частоты вращения коленчатого вала от мощности и крутящего момента (нагрузки) двигателя в диапазоне от полной мощности, развиваемой при максимальной частоте вращения коленчатого вала, до холостого хода при минимальной частоте вращения коленчатого вала. Из рассмотрения характеристик видно, что при постоянном положении рычага управления регулятором частота вращения мало зависит от изменения мощности в широких пределах. Однако степень неравномерности увеличивается при уменьшении регулируемой частоте вращения и становится значительной (40…70%) при минимальной частоте вращения на холостом ходу. Это обусловливается постоянной жесткостью пружины и значительным уменьшением центробежной силы грузов при уменьшении частоты вращения вала регулятора.
д., характеризующая зависимость частоты вращения коленчатого вала от мощности и крутящего момента (нагрузки) двигателя в диапазоне от полной мощности, развиваемой при максимальной частоте вращения коленчатого вала, до холостого хода при минимальной частоте вращения коленчатого вала. Из рассмотрения характеристик видно, что при постоянном положении рычага управления регулятором частота вращения мало зависит от изменения мощности в широких пределах. Однако степень неравномерности увеличивается при уменьшении регулируемой частоте вращения и становится значительной (40…70%) при минимальной частоте вращения на холостом ходу. Это обусловливается постоянной жесткостью пружины и значительным уменьшением центробежной силы грузов при уменьшении частоты вращения вала регулятора.
Регуляторы принцип работы которых описан выше применяются на большинстве рядных ТНВД. На рисунке показан двухрежимный регулятор рядного ТНВД легкового автомобиля Мерседес.
Рис. Двухрежимный регулятор:
1 – вакуумная камера остановки двигателя; 2 – контргайка; 3 – вакуумная камера увеличения частоты вращения коленчатого вала двигателя; 4 – ограничительный винт количества топлива на минимальной частоте вращения коленчатого вала двигателя; 5 – рычаг изменения подачи топлива; 6 – винт пружины регулятора; 7 – промежуточный рычаг; 8 – винт регулировки максимальной частоты вращения; 9 – центробежный регулятор; 10 – рейка; 11 – упорный рычаг; 12 – рычаг рейки
На режиме пуска вследствие максимального сближения грузов центробежного регулятора 9 рейка регулирования подачи топлива 10 через систему рычагов занимает положение полной подачи топлива.
При работе двигателя в режиме холостого хода, вследствие воздействия на рейку слабой пружины со стороны вертикального рычага и положения центробежных грузов, поддерживается стабильная частота вращения коленчатого вала.
В режиме частичной или полной нагрузки воздействие на рейку насоса осуществляется только от педали акселератора, которая связана системой тяг с рычагом изменения подачи топлива на регуляторе и регулятор частоты вращения в работе не участвует.
При увеличении частоты вращения коленчатого вала во время торможения двигателем рейка насоса устанавливается в положение прекращения подачи. Если частота вращения коленчатого вала достигнет 5150 об/мин рейка устанавливается в положение прекращения подачи топлива, чем достигается ограничение максимальной частоты вращения, для предотвращения максимально допустимых нагрузок на двигатель.
Регулятор частоты вращения двигателя в Химках: 540-товаров: бесплатная доставка [перейти]
Партнерская программаПомощь
Химки
Каталог
Каталог Товаров
Одежда и обувь
Одежда и обувь
Стройматериалы
Стройматериалы
Здоровье и красота
Здоровье и красота
Продукты и напитки
Продукты и напитки
Текстиль и кожа
Текстиль и кожа
Детские товары
Детские товары
Электротехника
Электротехника
Сельское хозяйство
Сельское хозяйство
Мебель и интерьер
Мебель и интерьер
Промышленность
Промышленность
Вода, газ и тепло
Вода, газ и тепло
Все категории
ВходИзбранное
Регулятор частоты вращения двигателя
670 004
Частотный регулятор ATV61HC16Y (160 кВт)
ПОДРОБНЕЕЕще цены и похожие товары
1 886 279
Частотный регулятор ATV61QC50N4 (500 кВт)
ПОДРОБНЕЕЕще цены и похожие товары
41 910
Частотный преобразователь VEDA Drive VF-51 11 кВт (380В,3 фазы) ABA00011
ПОДРОБНЕЕЕще цены и похожие товары
86 024
Преобразователь частоты Speck BADU Eco Drive II для 1,50 кВт, 380 В (297. 0150.402)
0150.402)
ПОДРОБНЕЕЕще цены и похожие товары
34 177
Преобразователь частоты NVF2G-11/PS4 11кВт 380В 3ф тип для вентиляторов и водяных насосов CHINT 639014
ПОДРОБНЕЕЕще цены и похожие товары
74 114
Преобразователь частоты Speck BADU Eco Drive II для 0,75 кВт, 380 В (297.0075.402)
ПОДРОБНЕЕЕще цены и похожие товары
149 036
Частотный регулятор ATV61HU40Y (4 кВт)
ПОДРОБНЕЕЕще цены и похожие товары
13 580
Частотный преобразователь серии VCI — 3 фазы (380В) — до 2,2кВт
ПОДРОБНЕЕЕще цены и похожие товары
36 438
Частотный регулятор ATV212WU55N4 (5,5 кВт)
ПОДРОБНЕЕЕще цены и похожие товары
160 526
Преобразователь частоты Speck BADU Eco Drive II для 5,50 кВт, 380 В (297. 0550.402)
0550.402)
ПОДРОБНЕЕЕще цены и похожие товары
36 889
Частотный регулятор ATV312HU55M3 (5,5 кВт)
ПОДРОБНЕЕЕще цены и похожие товары
169 299
Преобразователь частоты Speck Badu Eco Drive 2 4,00 кВт
ПОДРОБНЕЕЕще цены и похожие товары
290 379
Частотный регулятор ATV212WD75N4 (75 кВт)
ПОДРОБНЕЕЕще цены и похожие товары
61 452
Частотный преобразователь Schneider Electric ATV310 11кВт 380В 3Ф
ПОДРОБНЕЕЕще цены и похожие товары
66 020
Частотный регулятор ATV312HU55S6 (5,5 кВт)
ПОДРОБНЕЕЕще цены и похожие товары
114 000
Danfoss Преобразователь частоты Danfoss VLT HVAC Basic Drive FC 101 131N0186
ПОДРОБНЕЕЕще цены и похожие товары
733 482
Преобразователь частоты ITD204U43B3
ПОДРОБНЕЕЕще цены и похожие товары
48 124
Преобразователь частоты Danfoss VLT 2855 (195N1087) 5,5 кВт, 3ф, 380-480В
ПОДРОБНЕЕЕще цены и похожие товары
59 100
NETTER ATV-320D11N4C Регулятор частотно-регулируемый смонтированный в корпус
ПОДРОБНЕЕЕще цены и похожие товары
35 224
GD20-011G-4 преобразователь частоты (частотный)
ПОДРОБНЕЕЕще цены и похожие товары
63 467
NETTER ATV-320D15N4C Регулятор частотно-регулируемый смонтированный в корпус
ПОДРОБНЕЕЕще цены и похожие товары
102 597
Преобразователь частоты Speck Badu Eco Drive 2 0,75 кВт
ПОДРОБНЕЕЕще цены и похожие товары
10 920
Частотный преобразователь серии VCI — 3 фазы (380В) — до 0,75кВт
ПОДРОБНЕЕЕще цены и похожие товары
105 458
Частотный регулятор ATV320D15S6C (15 кВт)
ПОДРОБНЕЕЕще цены и похожие товары
11 762
Преобразователь частоты вращения двигателя водяного насоса, 1 фаза, 220 В, 4 кВт
ПОДРОБНЕЕЕще цены и похожие товары
20 442
Частотный регулятор ATV320U15N4C (1,5 кВт)
ПОДРОБНЕЕЕще цены и похожие товары
12 630
Частотный преобразователь серии VCI — 3 фазы (380В) — до 1,5кВт
ПОДРОБНЕЕЕще цены и похожие товары
Преобразователь частоты электродвигателя 220 В 0,75 кВт 4 А
ПОДРОБНЕЕЕще цены и похожие товары
2 страница из 18
Регулятор частоты вращения для двигателя 190F / 94683043
-
БЕНЗОПИЛЫ, ЭЛЕКТРОПИЛЫ + РАСХОДКА
-
БЕТОНОМЕШАЛКИ
-
МОТОБЛОКИ + КУЛЬТИВАТОРЫ
-
МОТОБУКСИРОВЩИКИ (МОТОСОБАКИ) И КОМПЛЕКТУЮЩИЕ
-
МОТОБУРЫ, РУЧНЫЕ БУРЫ, ШНЕКИ
-
СНЕГОУБОРОЧНИКИ
-
СТАБИЛИЗАТОРЫ
-
ТЕПЛОВОЕ ОБОРУДОВАНИЕ
-
ТРИММЕРЫ + КУСТОРЕЗЫ
-
ЭЛЕКТРОГЕНЕРАТОРЫ
-
АВТОМОЙКИ
-
АКСЕССУАРЫ ДЛЯ АВТОМОБИЛЯ
-
ВСЁ ДЛЯ ВАШЕГО ОГОРОДА
-
ВЫСОТОРЕЗЫ
-
ГАЗОНОКОСИЛКИ И СКАРИФИКАТОРЫ
-
ДВИГАТЕЛИ БЕНЗИНОВЫЕ И ЭЛЕКТРИЧЕСКИЕ
-
ЗАПЧАСТИ
-
КОМПРЕССОРЫ И ПНЕВМАТИЧЕСКИЙ ИНСТРУМЕНТ
-
КРЕПЕЖНЫЕ ПРИСПОСОБЛЕНИЯ
-
ЛЕСТНИЦЫ, СТРЕМЯНКИ
-
ЛОДОЧНЫЕ МОТОРЫ
-
МОТОПОМПЫ
-
НАСОСЫ
-
ОБОРУДОВАНИЕ ДЛЯ ФЕРМЕРОВ
-
ОПРЫСКИВАТЕЛИ БЕНЗИНОВЫЕ и РУЧНЫЕ
-
ПОДМЕТАЛЬНЫЕ МАШИНЫ И АКСЕССУАРЫ
-
ПОДЪЁМНЫЕ МЕХАНИЗМЫ, РАСХОДКА
-
ПРОМСЫРЬЕ
-
ПУСКО-ЗАРЯДНЫЕ УСТРОЙСТВА
-
РАСХОДНЫЕ МАТЕРИАЛЫ
-
САДОВЫЕ ИЗМЕЛЬЧИТЕЛИ, ДРОБИЛКИ
-
САДОВЫЕ НОЖНИЦЫ
-
САДОВЫЕ ПЫЛЕСОСЫ И ВОЗДУХОДУВЫ
-
СВАРОЧНОЕ ОБОРУДОВАНИЕ
-
СЛЕСАРНО-СТРОИТЕЛЬНЫЙ ИНСТРУМЕНТ
-
СПЕЦОДЕЖДА
-
СТАНКИ
-
СТРОИТЕЛЬНАЯ ТЕХНИКА
-
ТУРИЗМ, СПОРТ, ОТДЫХ, СУВЕНИРЫ
-
ШТУКАТУРНО-МАЛЯРНЫЙ ИНСТРУМЕНТ
-
ЭЛЕКТРОИНСТРУМЕНТ
-
ЭЛЕКТРООБОРУДОВАНИЕ
-
Котлы и отопительное оборудование
-
ХОЗТОВАРЫ
-
ТРАКТОРА И РАЙДЕРЫ
- Описание
- Отзывы (0)
Описание
Напишите свой отзыв о «Регулятор частоты вращения для двигателя 190F / 94683043»
Имя / Псевдоним
Плюсы
Минусы
Комментарий
Оценка товара
Нажимая на кнопку я соглашаюсь с политикой обработки моих персональных данных
Регулятор вращения двигателя в категории «Техника и электроника»
Регулятор оборотов двигателя US-52 400W, контроллер скорости вращения мотора мощностью до 400 Вт
На складе в г.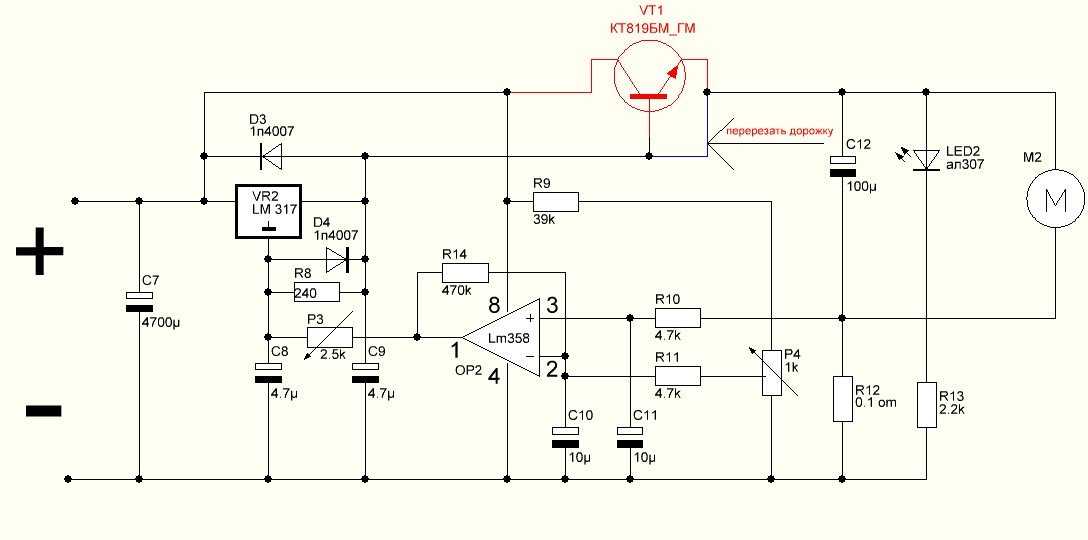 Ровно
Ровно
Доставка по Украине
547 грн
Купить
Регулятор скорости вращения двигателя безколлекторный для автомоделей HOBBYWING EZRUN MAX8 150A 2-6S RC
На складе в г. Днепр
Доставка по Украине
6 550 грн
Купить
Бесколлекторный регулятор скорости вращения двигателя для судомоделей HOBBYWING SEAKING V3.1 60A 2-3S RC
На складе в г. Днепр
Доставка по Украине
3 650 грн
Купить
Радиатор охлаждения для регулятора скорости вращения двигателя HOBBYWING XR10 PRO улучшенный запчасти RC
На складе в г. Днепр
Доставка по Украине
1 060 грн
Купить
Регулятор оборотов двигателя UX-52 25W V.1.0, контроллер скорости вращения двигателя с цифровым дисплеем
На складе в г. Ровно
Доставка по Украине
782 грн
Купить
Регулятор хода для самолета VGOOD 40A 2-6S ESC для регулировки скорости оборотов двигателя на радиоуправлении
На складе в г. Днепр
Днепр
Доставка по Украине
1 260 грн
Купить
Диммер регулятор скорости вращения двигателя 12-40 В 10 А
На складе
Доставка по Украине
по 220 грн
от 2 продавцов
220 грн
Купить
Регулятор оборотов двигателя UX-52 250W V.1.0, контроллер скорости вращения двигателя с цифровым дисплеем
На складе в г. Ровно
Доставка по Украине
1 017 грн
Купить
Регулятор скорости вращения двигателя постоянного тока 6,5В-55В 20A 15кГц с дисплеем
Доставка по Украине
738 грн
Купить
Регулятор скорости вращения двигателя постоянного тока ШИМ 6В-60В 20A 21кГц с дисплеем
Доставка по Украине
562 грн
Купить
Регулятор частоты вращения двигателя TDA1085C
Доставка по Украине
104 грн
Купить
MTY-0-15-AT Электронный регулятор скорости вращения двигателя (макс. 1,5А), Sentera Controls
Доставка из г. Киев
Киев
1 784 грн
Купить
MTY-0-25-AT Электронный регулятор скорости вращения двигателя (макс. 2,5А), Sentera Controls
Доставка из г. Киев
1 865 грн
Купить
MTY-0-05-AT Электронный регулятор скорости вращения двигателя (макс. 0,5А), Sentera Controls
Доставка из г. Киев
1 663 грн
Купить
SDY-1-15-DT Электронный регулятор скорости вращения двигателя 230В макс. 1,5А, Sentera Controls
Доставка из г. Киев
2 149 грн
Купить
Смотрите также
SDY-1-30-DT Электронный регулятор скорости вращения двигателя 230В макс. 3,0А, Sentera Controls
Доставка из г. Киев
2 190 грн
Купить
Контроллер регулятор скорости вращения двигателя постоянного тока 5В-30В 5A c дисплеем ZK-MG
Доставка по Украине
262 грн
Купить
ШИМ регулятор скорости вращения двигателя 12-40 В 10А
Заканчивается
Доставка по Украине
90.85 грн
Купить
Регулятор скорости вращения двигателя постоянного тока 10В-60В 15A 25кГц
Доставка по Украине
228 грн
Купить
Регулятор частоты вращения двигателей 844. 20W
20W
Под заказ
Доставка по Украине
7 617 грн
Купить
Регулятор частоты вращения двигателей (выключение поворотом) 245.20
Доставка по Украине
5 286 грн
Купить
Контроллер регулятор скорости вращения двигателя постоянного тока 35В, 5А
На складе в г. Николаев
Доставка по Украине
208 грн
212 грн
Купить
Николаев
Регулятор скорости вращения двигателя постоянного тока 60В, 30А с дисплеем
На складе в г. Николаев
Доставка по Украине
818 грн
835 грн
Купить
Николаев
Регулятор хода 320 А с реверсом для коллекторного мотора, для машинок, катеров и др.
Доставка по Украине
950 грн
Купить
Электронный Регулятор DC 6V-90V 15A Модулятор ширины импульса PWM Регулятор частоты вращения двигателя PLC
Доставка по Украине
240 грн
Купить
Регулятор швидкості обертання двигуна постійного струму, 50В, 40А
На складе в г. Николаев
Николаев
Доставка по Украине
804 грн
1 018 грн
Купить
Николаев
Контроллер регулятор скорости вращения двигателя постоянного тока 8В-55В 10A
Доставка по Украине
333 грн
Купить
30A-40А 12V24V36V Регулятор скорости вращения двигателя щеточный
Доставка по Украине
620 грн
Купить
40A 12V24V36 Регулятор скорости вращения двигателя
Доставка по Украине
325 грн
Купить
Регуляторы частоты вращения — однорежимный, всережимный
Однорежимный регулятор двигателя 6 ДР 30/50 (рис. 139)—прямого действия — состоит из двух грузов 2, шарнирно закрепленных с помощью шарниров 3 на шестерне 1 распределительного вала и стянутых пружиной 5. Внутренние плечи грузов через штыри 4 воздействуют на муфту 15 и через упорный шарикоподшипник 14—на обойму 13. С другой стороны, обойма испытывает усилие сжатой пружины 12. Через рычаг 9 перемещение обоймы передается на пружинную связь 8. Тяга 6 топливных насосов связана через ролик с сектором рукоятки поста управления (на рис. 139 не показано).
Тяга 6 топливных насосов связана через ролик с сектором рукоятки поста управления (на рис. 139 не показано).
При вращении за счет центробежной силы грузы расходятся и, преодолевая силу упругости пружины 12, перемещают обойму 13 вправо. Если частота вращения двигателя ниже предельной, то благодаря зазору h между внутренним торцом пружинной связи 8 и упором тяги 7 регулятор не оказывает влияния на положение тяги 6 топливных насосов. Когда частота вращения достигнет предельной, зазор h будет выбран и регулятор начнет воздействовать на топливную тягу, перемещая ее влево в направлении уменьшения подачи топлива.
Предельную частоту вращения, ограничиваемую регулятором, можно изменять величиной затяга пружины 12, что достигается поворотом маховика 11, перемещающего шпиндель 10.
Всережимный регулятор двигателя 6Ч24/36 (рис. 140) — прямого действия. В корпусе 12 в подшипниках вращается вертикальный вал 1, приводимый в движение через передаточные шестерни 20 и 2 от распределительного вала.![]() Два груза 18 закреплены в крестовине на осях 19 и внутренними плечами, при помощи упоров 5, нажимают на втулку 4, свободно перемещающуюся вдоль
Два груза 18 закреплены в крестовине на осях 19 и внутренними плечами, при помощи упоров 5, нажимают на втулку 4, свободно перемещающуюся вдоль
вертикального вала 1. Перемещение втулки 4 через радиально-упорный подшипник 17 передается на муфту 5. С противоположной стороны муфта воспринимает усилие пружин 6, верхние концы которых упираются в тарелку 14. Закрепленный на муфте 5 направляющий стакан 16 через вилку и валик связан с рычагом 15, конец которого воздействует на тягу топливных насосов.
При возрастании частоты вращения грузы через втулку 4 и муфту 5 действуют на пружины 6, сжимая их. Направляющий стакан 16 поднимается и через рычаг 15 перемещает топливную тягу в направлении уменьшения подачи топлива. При повышении нагрузки, и, следовательно, понижении частоты вращения сила упругости пружин преодолевает центробежную силу грузов, направляющий стакан 16 опускается и рычаг 15 воздействует на рейку топливных насосов, увеличивая подачу топлива.
Частота вращения, которую регулятор должен поддерживать, задается изменением затяга пружин 6. Это достигается поворотом маховика 11 и с ним шестерни 13, которая поворачивает шестерню 7 с удлиненной втулкой. Шестерня 7 зафиксирована в корпусе и осевого перемещения не имеет. Расположенный внутри нее на резьбе шпиндель 10 при вращении шестерни 7 получает осевое перемещение, что изменяет затяг пружин 6.
Это достигается поворотом маховика 11 и с ним шестерни 13, которая поворачивает шестерню 7 с удлиненной втулкой. Шестерня 7 зафиксирована в корпусе и осевого перемещения не имеет. Расположенный внутри нее на резьбе шпиндель 10 при вращении шестерни 7 получает осевое перемещение, что изменяет затяг пружин 6.
Максимальная частота вращения, на которую можно настроить регулятор, ограничивается закрепленным на шпинделе установочным кольцом 9, минимальная частота вращения—регулировочным болтом 8.
Всережимно-предельный регулятор двигателя 7ДКРН 70/120 (рис. 141) — непрямого действия — приводится в движение через шестерню 6 вала топливных насосов. Шестерня 6 соединена со ступицей 5 регулятора через эластичную муфту 4. На ступице расположены грузы 7, внутренние плечи которых соединены с чекой 1 шпинделя 2. Под действием центробежных сил грузы 7 через чеку 1, шпиндель 2 и упорный шарикоподшипник 3 могут передвигать поршень 18 вправо. Давление на поршень уравновешивается пружинами, натяжение которых регулируется маховиком 17. При своем движении поршень 18 через ушко 16 и двуплечий угловой рычаг перемещает золотник 15, имеющий две отсечные кромки 11 и 12 (на рисунке поле золотника зачернено). Золотник 15 плотно входит в центральное отверстие поршня сервомотора 13 с удлиненной ступицей, который имеет окна, перекрывающиеся кромками 11 и 12 золотника. Через маслоподводящую трубу 14, кольцевой канал а и отверстия в ступице поршня 13 масло подводится под нижнюю отсечную кромку 12 золотника 15.
При своем движении поршень 18 через ушко 16 и двуплечий угловой рычаг перемещает золотник 15, имеющий две отсечные кромки 11 и 12 (на рисунке поле золотника зачернено). Золотник 15 плотно входит в центральное отверстие поршня сервомотора 13 с удлиненной ступицей, который имеет окна, перекрывающиеся кромками 11 и 12 золотника. Через маслоподводящую трубу 14, кольцевой канал а и отверстия в ступице поршня 13 масло подводится под нижнюю отсечную кромку 12 золотника 15.
При возрастании частоты вращения двигателя центробежная сила грузов преодолевает силу упругости пружины и поршень 18, перемещаясь вправо, поднимает золотник 15. Через образующуюся щель между нижней кромкой 12 золотника и нижними кромками окон поршня 13 масло поступает в полость «в» и перемещает поршень 13 вверх. Масло из пространства над поршнем сливается по трубе 8. Поршень остановится, когда нижние кромки его окон совпадут с нижней кромкой 12 золотника, и поступление масла в полость «в» прекратится. При снижении частоты вращения золотник перемещается вниз, открывая щель между своей верхней кромкой 11 и верхними кромками окон поршня. Масло из полости «в» перетекает в пространство над поршнем, и он опускается. Движение поршня вниз прекратится, когда верхние кромки его окон совпадут с верхними кромками золотника. Таким образом, перемещение поршня сервомотора равно величине перемещения золотника, или, как говорят, поршень «следит» за золотником.
При снижении частоты вращения золотник перемещается вниз, открывая щель между своей верхней кромкой 11 и верхними кромками окон поршня. Масло из полости «в» перетекает в пространство над поршнем, и он опускается. Движение поршня вниз прекратится, когда верхние кромки его окон совпадут с верхними кромками золотника. Таким образом, перемещение поршня сервомотора равно величине перемещения золотника, или, как говорят, поршень «следит» за золотником.
При своем движении вверх (в случае возрастания частоты вращения) поршень сервомотора 13 через толкатель 9 может воздействовать на ролик 19, сидящий на пальце 10 рычага 20, и поворачивать его по часовой стрелке. Это приведет к перемещению тяги 21 вниз и через поворотный валик и систему рычагов (на рисунке не показаны) — к уменьшению подачи топлива.
При нормальных условиях эксплуатации регулятор действует как предельный и управление подачей топлива производится маховиком, с поста управления. Если частота вращения меньше предельной, то между толкателем 9 и роликом 19 имеется зазор.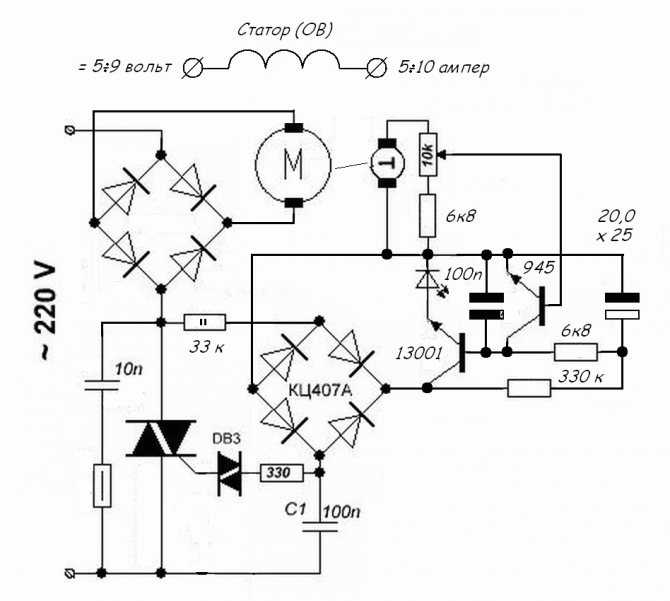 По мере увеличения частоты вращения двигателя этот зазор уменьшается, и при достижении предельной частоты вращения толкатель упрется в ролик. Дальнейшее увеличение частоты вращения происходить не будет, так как поршень 13, поднимаясь вверх, станет опускать через рычаг 20 тягу 21 в сторону нулевой подачи.
По мере увеличения частоты вращения двигателя этот зазор уменьшается, и при достижении предельной частоты вращения толкатель упрется в ролик. Дальнейшее увеличение частоты вращения происходить не будет, так как поршень 13, поднимаясь вверх, станет опускать через рычаг 20 тягу 21 в сторону нулевой подачи.
При плавании судна на волнении регулятор включают по схеме всережимного. Для этого сначала уменьшают маховиком с поста управления количество подаваемого топлива и устанавливают между толкателем 9 и роликом 19 специальную проставку. Затем на посту управления увеличивают подачу топлива до номинального значения (по нагрузке) и несколько ослабляют маховиком 17 затяг пружин регулятора. Этим устанавливается пониженная частота вращения двигателя, которая поддерживается регулятором при плавании судна в штормовых условиях.
Всережимный регулятор с ограничением по нагрузке и по задаваемым и фактическим оборотам Р13М-2КЕ (рис. 142) — непрямого действия разработан Центральным научно-исследовательским дизельным институтом (ЦНИДИ) и применяется в судовых установках с главными дизелями типа ДР 43/61-1 и ДР 30/50-3. Этот регулятор отвечает- всем требованиям, предъявляемым к регуляторам, используемым в системах дистанционного автоматизированного управления двигателями.
Этот регулятор отвечает- всем требованиям, предъявляемым к регуляторам, используемым в системах дистанционного автоматизированного управления двигателями.
Привод регулятора осуществляется посредством приводного валика 1, который передает вращение через шестеренную пару 2, упругую муфту 5 и верхнюю шестеренную пару чашке измерителя 6. Упругая муфта 5 служит для гашения резких колебаний частоты вращения, благодаря чему второй зубчатой шестерне верхней пары, выполненной заодно с чашкой 6, они не передаются.
Измерительное устройство представляет собой два груза 7, шарнирно закрепленных в чашке 6. Внутренние плечи грузов через упорную тарелку и упорный шарикоподшипник воздействуют на нижнюю тарелку пружины измерителя 8. Нижняя тарелка пружины соединена со шпинделем, проходящим свободно через сухарь 18. На верхнем конце шпинделя закреплена упорная тарелка 34, с помощью которой действует механизм ограничения нагрузки. К упорному шарикоподшипнику присоединен золотник 9 с двумя рабочими полями, проходящий через отверстие в ступице чашки 6.
Задающее устройство — пружина 8. При задании нового режима изменение затяга пружины осуществляется поворотом валика управления 24 через каретку 23 и сухарь 18.
Источник вспомогательной энергии — масляный насос, состоящий из шестеренной пары 2 и двух всасывающих и двух нагнетательных шариковых клапанов 3. Наличие двух пар клапанов обеспечивает работу регулятора при реверсе двигателя. Масло засасывается из ванны и подается по каналам в полость над поршнем сервомотора 10 к верхнему полю золотника 9 и в два аккумулятора 4 (на рисунке показан один). Каждый аккумулятор представляет собой цилиндр с подпружиненным поршнем, который при повышении давления масла выше 8 бар открывает сливное отверстие «а».
Гидравлический сервомотор состоит из цилиндра с поршнем 10, перемещение которого управляется золотником 9. (вверху на кольцевую площадь поршня непрерывно воздействует давление масла. При подъеме золотника 9 масло от насоса направляется под поршень 10 и поднимает его. При опускании золотника масло из-под поршня сливается в ванну, и за счет давления масла на верхнюю кольцевую площадь поршень опускается. Перемещение поршня 10 через продольный вал 11, пару конических полушестерен и поперечный вал 12 передается тяге 13, управляющей топливными насосами.
При опускании золотника масло из-под поршня сливается в ванну, и за счет давления масла на верхнюю кольцевую площадь поршень опускается. Перемещение поршня 10 через продольный вал 11, пару конических полушестерен и поперечный вал 12 передается тяге 13, управляющей топливными насосами.
Жесткая обратная связь состоит из рычага на продольном валу 11, шатуна 15, ролика с валиком 16 и вильчатого рычага 17, который связан с сухарем 18, воздействующим на затяг пружины 8. Положение профильной части шатуна 15, соприкасающейся с роликом, можно изменять, чем достигается необходимая степень неравномерности (статическая ошибка) — от 0 до 6%. Регулируется степень неравномерности винтом с указателем 35, который при повороте червячной шестерни разворачивает эксцентрично сидящий на ее ступице правый конец шатуна 15. В результате этого под ролик подводится другой участок профиля шатуна.
Гибкая обратная связь состоит из цилиндра с поршнем изодрома 20, иглы 21, корректора 22 и масляной полости, образуемой каналами между поршнем 20, корректором 22 и золотником 9.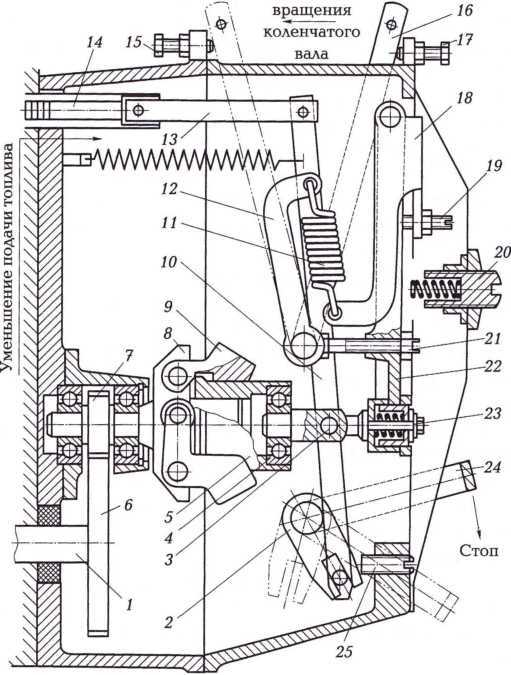 Поршень 20 при помощи подпоршневой пружины постоянно прижат к пальцу 19 продольного вала 11. Игольчатым клапаном 21 регулируется время изодрома. В случае значительного возрастания давления (или разрежения) в полости изодрома корректор 22 сообщает ее с масляной ванной.
Поршень 20 при помощи подпоршневой пружины постоянно прижат к пальцу 19 продольного вала 11. Игольчатым клапаном 21 регулируется время изодрома. В случае значительного возрастания давления (или разрежения) в полости изодрома корректор 22 сообщает ее с масляной ванной.
Механизм, ограничения нагрузки состоит из: углового рычага с плечами 32 и 33, толкателя 31, шестерен 28, 29, 30 и находящихся с ними в зацеплении секторов с указателями 25, 26, 27, а также сектора 14.
Каждое положение сектора 14, насаженного на продольный вал 11, соответствует определенной подаче топлива. Одновременно с изменением регулятором подачи топлива через сектор 14 поворачивается шестерня с указателем нагрузки 25. Эта шестерня посредством закрепленного на ней зубчатого сектора разворачивает шестерню 30, в ступицу которой упирается кольцевой бурт толкателя 31. Положение шестерни 30 всегда соответствует количеству подаваемого насосами топлива.
При изменении скоростного режима валиком 24 поворачивается каретка 23. Закрепленный на ней зубчатый сектор через валик с шестернями поворачивает вертикальный сектор с указателем 26. Одновременно через другой зубчатый сектор поворачивается шестерня 29, положение которой соответствует подаче топлива, допускаемой для данного скоростного режима. Стрелка указателя 26 показывает величину этой подачи.
Закрепленный на ней зубчатый сектор через валик с шестернями поворачивает вертикальный сектор с указателем 26. Одновременно через другой зубчатый сектор поворачивается шестерня 29, положение которой соответствует подаче топлива, допускаемой для данного скоростного режима. Стрелка указателя 26 показывает величину этой подачи.
Максимальная нагрузка, выше которой при любом скоростном режиме работа дизеля не допускается, задается определенным положением шестерни 28. Величину этой нагрузки показывает указатель 27, который закреплен на секторе, находящемся в зацеплении с шестерней 28.
Шестерня 29 свободно насажена на ступицу шестерни 28. У обоих этих шестерен на торцах, обращенных к шестерне 30, имеются выступы. Подобный выступ имеется на торце шестерни 30.
Работа регулятора при увеличении частоты вращения происходит следующим образом.
Грузы 7, преодолевая силу упругости пружины 8, поднимают золотник 9. Масло от насоса поступает в полость под поршнем сервомотора 10 и перемещает его вверх, за счет чего тяга 13 передвигается в направлении уменьшения подачи топлива. Одновременно поднимается поршень изодрома 20. В полости под этим поршнем, а значит и под золотником 9, создается разрежение, препятствующее перемещению золотника вверх. Этому может способствовать также и жесткая обратная связь (при степени неравномерности более 0%), которая через рычаг 17 несколько увеличивает затяг пружины 8. По истечении не которого времени (время изодрома) за счет перетекания масла через игольчатый клапан 21 давление в полости изодрома сравняется с атмосферным, и гибкая связь перестанет воздействовать на золотник 9.
Одновременно поднимается поршень изодрома 20. В полости под этим поршнем, а значит и под золотником 9, создается разрежение, препятствующее перемещению золотника вверх. Этому может способствовать также и жесткая обратная связь (при степени неравномерности более 0%), которая через рычаг 17 несколько увеличивает затяг пружины 8. По истечении не которого времени (время изодрома) за счет перетекания масла через игольчатый клапан 21 давление в полости изодрома сравняется с атмосферным, и гибкая связь перестанет воздействовать на золотник 9.
К концу переходного режима золотник 9 займет исходное положение и перемещение поршня 10 прекратится. При нулевой степени неравномерности частота вращения восстановится до первоначального значения, при степени неравномерности более 0% — соответственно повысится .
В случае понижения частоты вращения регулятор будет действовать в обратном направлении, увеличивая подачу топлива. Если при этом нагрузка возрастет до значения, заданного механизмом ограничения, то шестерня 30, упираясь своим выступом в выступ соответствующей шестерни (28 или 29), начнет перемещаться вдоль своей оси влево и передвигать толкатель 31. Толкатель 31 через рычаг 32 и вильчатый рычаг 33 поднимет упорную тарелку 34. Это позволит грузам 7 поднять золотник 9 и направить масло под поршень сервомотора 10, который, перемещаясь вверх, будет передвигать тягу 13 в направлении уменьшения подачи топлива.
Толкатель 31 через рычаг 32 и вильчатый рычаг 33 поднимет упорную тарелку 34. Это позволит грузам 7 поднять золотник 9 и направить масло под поршень сервомотора 10, который, перемещаясь вверх, будет передвигать тягу 13 в направлении уменьшения подачи топлива.
Методы управления скоростью различных типов двигателей с регулированием скорости
Скачать PDF
Kazuya SHIRAHATA
Компания Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулированием скорости. Наши блоки управления скоростью включают в себя двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы двигателей с регулированием скорости. «Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении от бытовой техники до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Функции и характеристики, необходимые для этих двигателей, очень разнообразны. Если сосредоточить внимание на сегменте управления скоростью на рынке двигателей, серводвигатели и шаговые двигатели регулируют свою скорость с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и/или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и характеристики следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Двигатель переменного тока и мотор-редуктор
- Бесщеточный двигатель постоянного тока и мотор-редукторы
- Инверторный блок
2. Методы управления скоростью различных двигателей с регулированием скорости
Способ управления выходом схемы управления скоростью можно условно разделить на две группы: фазовое управление и инверторное управление, которые составляют группы продуктов, показанные на рис. 1.
Рис. 1 Классификация двигателей с регулируемой скоростью
2.1. Двигатели переменного тока с регулируемой скоростью
2.1.1. Конструкция двигателя
Как показано на рис. 2, конструкция однофазных и трехфазных асинхронных двигателей включает в себя статор с намотанной первичной обмоткой и литой из цельного алюминия ротор корзинообразной формы. Ротор недорогой, потому что конструкция проста и не использует магнит.
Рис.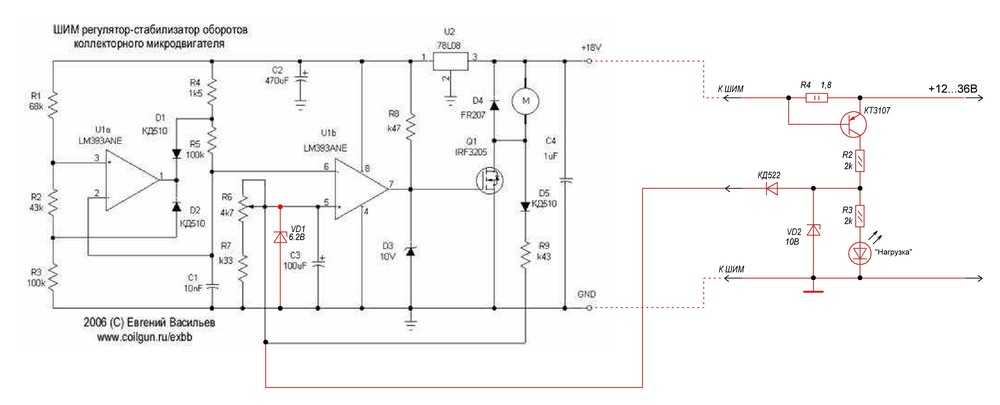 2 Конструкция асинхронного двигателя
2 Конструкция асинхронного двигателя
Когда скорость этого двигателя должна регулироваться, для определения скорости используется тахогенератор, который крепится к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к вал двигателя и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис. 3 Система управления двигателем переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя можно выразить выражением (1). Когда напряжение, подаваемое на двигатель, увеличивается и уменьшается, скольжение с изменяется, а затем изменяется скорость вращения N.
N = 120· f ·(1- s )/ P · · · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, как показано на рис. 4, существует стабильный диапазон и диапазон нестабильности на кривой Скорость вращения — Крутящий момент. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы сделать возможной надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
4, существует стабильный диапазон и диапазон нестабильности на кривой Скорость вращения — Крутящий момент. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы сделать возможной надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4 Скорость вращения – характеристики крутящего момента асинхронных двигателей
Рис. 5 Простое управление напряжением
Доступные методы управления напряжением включают управление с помощью трансформатора или фазового управления. На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так просто реализовать с двигателем переменного тока с регулируемой скоростью. В качестве альтернативы напряжение переменного тока можно регулировать, устанавливая время ВКЛ/ВЫКЛ каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжения, как показано на рис. 7 и рис. 8. Управление скоростью достигается методом фазового управления путем управления среднеквадратичным значением. значение переменного напряжения.
Этот метод не так просто реализовать с двигателем переменного тока с регулируемой скоростью. В качестве альтернативы напряжение переменного тока можно регулировать, устанавливая время ВКЛ/ВЫКЛ каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжения, как показано на рис. 7 и рис. 8. Управление скоростью достигается методом фазового управления путем управления среднеквадратичным значением. значение переменного напряжения.
Рис. 6 Изменение напряжения с помощью трансформатора
Рис. 7 Изменение напряжения по фазе управления
Рис. управление фазой с обратной связью даже в нестабильном диапазоне.
На рис. 9 в виде блок-схемы показана конфигурация системы управления скоростью для двигателя переменного тока с регулированием скорости.
Рис. 9 Блок-схема системы управления двигателем переменного тока
Рис. 10 Форма волны для каждого блока
На рис. 10 показаны формы волны для каждого блока. Заданное значение скорости d и обнаруженное напряжение e скорости, генерируемой тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения a .
Сигнал напряжения a низкий, когда обнаруженное значение скорости достигает заданного значения скорости, и выше, когда заданное значение скорости снижается. Поскольку триггерный сигнал выводится в точке, где треугольная волна b пересекается с сигналом напряжения a , определяется время (фазовый угол) включения симистора с уровнем сигнала напряжения a . Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид вышеупомянутого регулятора скорости. На рис. 11 рабочая точка двигателя рисует петлю Q-R-S-T-Q с центром в точке O, а скорость вращения поддерживается между N1 и N2. Эта петля максимально уменьшена за счет повышения точности определения скорости.
Рис. 11 Работа регулятора скорости
Электродвигатель регулятора скорости переменного тока имеет следующие особенности при использовании фазового регулирования с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть сконфигурирована просто потому, что сглаживающая схема не нужна, что позволяет получить компактную конструкцию по низкой цене.
2) Точно так же возможна конструкция с длительным сроком службы, поскольку не нужен большой алюминиевый электролитический конденсатор.
3) Переключение выполняется только один раз в каждом полупериоде стандартного источника питания переменного тока, что снижает уровень создаваемого шума.
2.1.3. Характеристики
Двигатели переменного тока с регулированием скорости обычно имеют характеристики скорости вращения и крутящего момента, показанные на рис. 12.
Рис. 12. «Линия безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, то катушка соединена звездой (звездой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов на каждый оборот ротор.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики скорости вращения бесщеточного двигателя постоянного тока имеют отрицательный наклон, когда его скорость не регулируется, что аналогично характеристике коллекторного двигателя постоянного тока.
Рис. 15 Характеристики вращательного момента бесщеточного двигателя постоянного тока скорость N1. Когда приложен момент нагрузки T1, рабочая точка смещается к Q, а скорость вращения уменьшается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизм управления скоростью должен будет изменять входное напряжение только всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Это управление напряжением осуществляется инвертором в выходной части схемы управления (драйвер). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как показано на рис. 16 (b), с помощью шести переключающих элементов (FET или IGBT), показанных на рис. 16 (a).
Рис. 16 (a) Выходная часть цепи управления (драйвер)
Рис. 16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на рис. 16 (а), а состояние ВКЛ/ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется интегральной микросхемой Холла, и соответствующий переключающий элемент включается или выключается, как показано на рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включены, и ток течет из фазы U в фазу W. В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
На рис. 17 показана конфигурация для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис. 17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от микросхемы Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от IC Холла отправляется на детектор скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом задания скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения. Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами, а вторичные потери малы.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость отклика.
3) Двигатель можно уменьшить, поскольку он очень эффективен.
4) Небольшие колебания скорости при изменении нагрузки.
На рис. 16 показана типичная последовательность переключения (метод подачи напряжения на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод синусоидального привода, получая информацию о положении ротора с высоким разрешением от программного обеспечения из сигнала Холла IC. Этот метод приводит к малошумному приводу, поскольку ток, который течет к двигателю, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, прикладываемых методом синусоидального привода и методом 120-градусного привода
2.2.3. Характеристики
Характеристики скорости вращения бесщеточного двигателя постоянного тока имеют ограниченный рабочий диапазон в дополнение к непрерывному рабочему диапазону.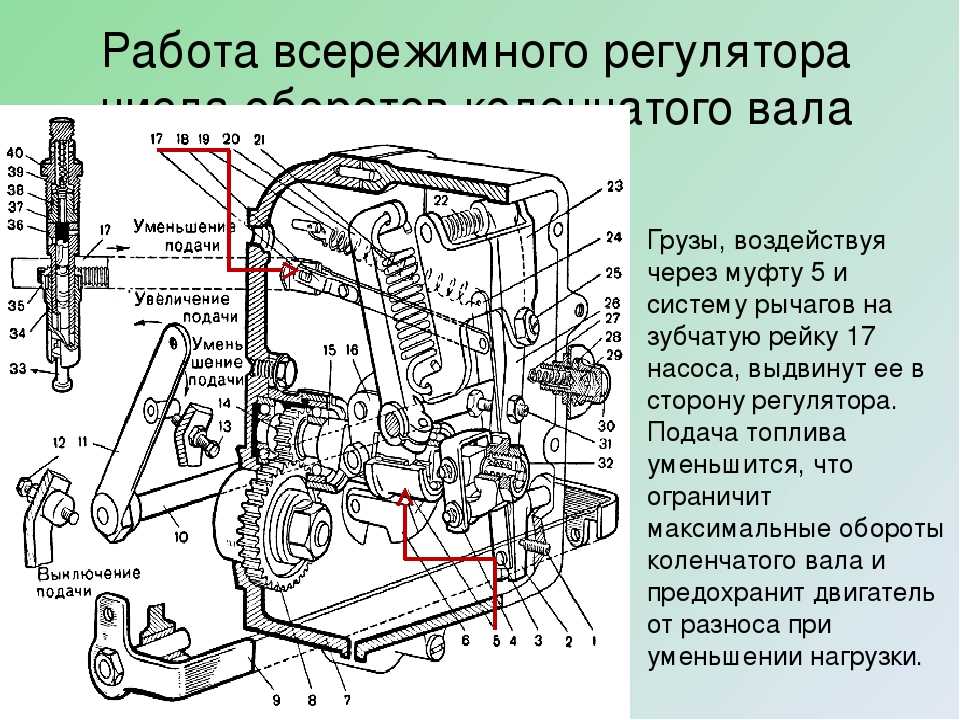
Зона ограниченного режима работы очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме продолжается в течение пяти секунд или более, активируется функция защиты привода от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок регулирует скорость трехфазного асинхронного двигателя путем изменения частоты f напряжения, подаваемого на двигатель. Блок инвертора изменяет частоту f, изменяя цикл ВКЛ/ВЫКЛ шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120· f ·(1- s )/ P ·· · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ/ВЫКЛ, как показано на рис. 21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее напряжение, двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее напряжение, двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
Рис. 19 Управление работой ВКЛ/ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление без обратной связи, которое просто изменяет скорость, и управление с обратной связью, которое снижает скорость изменение при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация системы управления в виде блок-схемы.
Рис. 20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и может достигать высоких скоростей (частота может быть установлена до 80 Гц) просто тогда, когда регулирование скорости при различных нагрузках не так важно.
Создаваемый крутящий момент Т двигателя определяется формулой (2). Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если V/f, отношение напряжения V к частоте f, будет постоянным.
T = K ・ I・V / f ・・・1 (9200)
t : крутящий момент [n · m]
v : напряжение питания [V]
i : Моторный ток [a]
f : Частота [Гц]
: 0004
Однако, чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f. Следовательно, чтобы получить постоянный крутящий момент от низкой скорости до высокой, необходимо отрегулировать отношение V/f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рис. 23.
Рис. 21 Управление V/f
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис. 22 Блок-схема управления с обратной связью
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, используя данные характеристик. таблице (рис. 25), подготовленной заранее, и регулирует частоту преобразователя без необходимости использования датчика скорости на двигателе.
Рис. 23 Характеристики Таблица
С помощью этой таблицы характеристик и обнаруженного времени разности фаз t инвертор вычисляет выходную частоту инвертора, которая соответствует команде скорости вращения Nset, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления V/f вычисляет напряжение, подаваемое на двигатель, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM. В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
2.3.2. Характеристика s
Характеристики скорости вращения и крутящего момента инверторного блока показаны на Рис. 26 и Рис. 27. Как поясняется в разделе, посвященном двигателю с регулированием скорости переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет собой предел непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис. 24. Характеристики скорости вращения для управления без обратной связи
) для использования в широком диапазоне приложений управления скоростью. Подходящий продукт для управления скоростью можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, необходимой для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, которая наилучшим образом отвечает различным потребностям наших клиентов.
Ссылки
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998)
(2) Кадзуо Абэ: «Технология бесщеточного двигателя с низким уровнем шума», RENGA No. 163, стр. 19-25 (2003)
(3) Кодзи Намихана, Масаёси Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA № 159, стр. 23-28 (1999)
| Kazuya Shirahata Завод Tsuruoka, ACIX Operations Circuit Technology Division Секция разработки схемы |
RPM Control Co. — ваш специалист по электронному управлению
Продукты
Типы кранов
Грузовики Hydrovac
Pumpmer Trucks
Каменные распределители
Утилитовые грузовики
Сбор отходов
Беспроводные продукты
Продукты
Типы
Гидроверовные грузовики
ПМОРТА
Pumper
Pumper 40004 Pumper 40004 Pumper 40004 Pumper4 Pumpmes
0004 Pumpmes
Pumper 40004.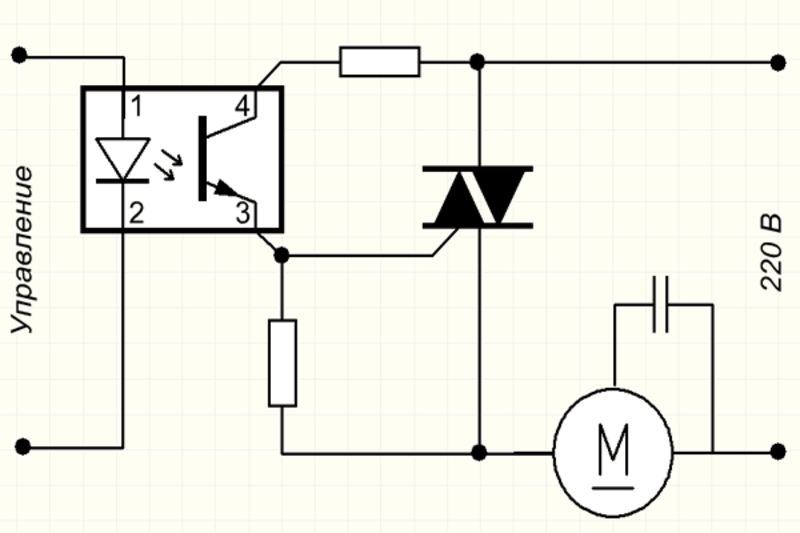
ГРУЗОВЫЕ ГРУЗОВЫЕ МАШИНЫ
СБОР МУСОРА
БЕСПРОВОДНЫЕ УСТРОЙСТВА
******RPM CAN START — НОВЫЙ ПРОДУКТ******
Обеспечьте возможность запуска двигателя вашего грузовика при низких температурах или в течение длительного периода простоя.
RCS позволит вашему двигателю поддерживать надлежащую температуру запуска, независимо от того, какая температура может быть снаружи, когда вы оставляете его без присмотра. RCS будет контролировать температуру моторного масла и охлаждающей жидкости, не позволяя двигателю достичь состояния, при котором он не сможет перезапуститься. Он также будет контролировать напряжение аккумулятора, чтобы поддерживать его на надлежащем уровне заряда. Если во время работы RCS двигатель указал, что ему требуется регенерация, программное обеспечение выполнит необходимую регенерацию, предотвращая время простоя из-за каких-либо проблем с сажевым фильтром. Его легко установить, в комплекте идут жгуты Plug and Play. Он будет работать на любом J1939, который использует J1939 для связи.
CAN Start можно установить на большинство дизельных двигателей с электронным управлением. Свяжитесь с нами для получения подробной информации.
ПРЕЙСКУРАНТНАЯ ЦЕНА $2 970,00 — продается в виде комплекта (модуль RCS и жгуты). Цены уточняйте у дилера
ОБЗОР RCS 360°
КОНТРОЛЛЕР ОБОРОТОВ ДВИГАТЕЛЯ — ESC LITE
Представляем наш новейший способ управления оборотами двигателя на двигателе J1939. Он имеет возможность управлять 3 различными наборами оборотов в минуту и переменным числом оборотов в минуту (увеличение/уменьшение). Программирование может быть выполнено с помощью любого устройства WIFI с веб-браузером, поэтому никакого специального программного обеспечения или программатора не требуется. Он будет подключаться к вашим автомобилям J1939 разъем связи. У нас есть жгуты Plug & Play для этого соединения. Этот продукт прост в установке, соединения выполняются с помощью клемм винтового типа. ESC Lite компактен и имеет размеры 4″ X 2,5″ X 1,5″.
ПРАЙС-ЦЕНА $700
ESC LITE ОБЗОР 360°
КОНТРОЛЛЕР ВЫБОРА ПИТАНИЯ
Это недавно разработанный продукт, который позаботится о ваших потребностях в питании переключателя с ключом и батареи при установке вашего продукта (ов). Подайте питание от батареи и заземлите модуль Power Choice, и он будет преобразовывать питание от батареи в питание переключателя с помощью реле на 80 ампер. Power Choice имеет 5 различных выходных мощностей с предохранителями, каждый из которых может быть защищен предохранителем до 15 ампер, максимальная общая мощность для 5 линий составляет 50 ампер. Также доступны 6 выходов заземления батареи. Эти 5 контактов питания и 6 контактов заземления выходят на 12-контактный разъем Deutsch. Питание от батареи и заземляющие соединения могут работать с проводом калибра до 8, чтобы обеспечить подачу 50 ампер. Размеры 5,5″ х 3,5″ х 2,25
ПРАЙС-ЦЕНА $198
ВЫБОР МОЩНОСТИ ОБЗОР 360°
ОПТИМАЙЗЕР АВТОРЕГЕНЕРАЦИИ — ЗАМЕНА AFR
Современные новые выхлопные системы DPF
дороговат в эксплуатации и обслуживании.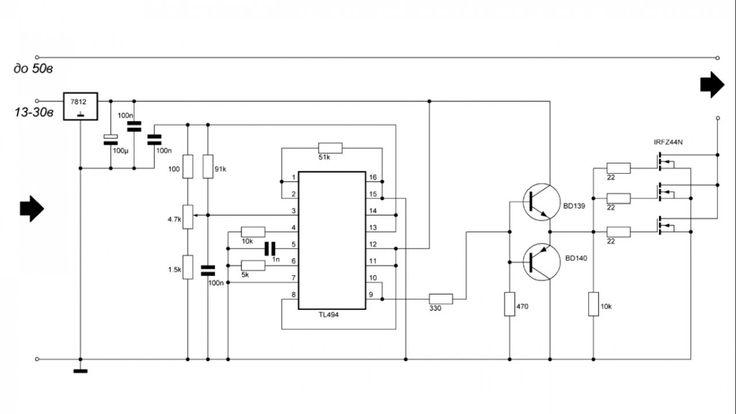 Авто
Авто
Regen Optimizer снижает потребность в
очистки, продлевает срок службы DPF и устраняет
регенерирует и позволяет увеличить время простоя
без подключения вашей системы. ARO Regen Optimizer регулирует ваши обороты в минуту до
поддерживать максимальную скорость сгорания для вашей системы DPF, когда она не находится под нагрузкой, уменьшая накопление влаги и сажи во время длительных периодов простоя. Автоматическое инициирование ранней регенерации сжигает сажу до того, как она может накопиться, устраняя накопление сажи до того, как она станет проблемой, помогает избежать дорогостоящих затрат на очистку и замену DPF. Гарантия на двигатель не аннулируется, система ARO оптимизирует систему регенерации OEM, не влияя на заводские настройки или заводское программирование. ARO будет работать, когда вы находитесь в режиме PTO. 9ТРЕБОВАНИЯ К СИСТЕМЕ 0018: двигатели 2010 года или новее, оснащенные DEF, которые обмениваются данными через шину J1939.
Auto Regen Optimizer будет работать на большинстве автомобилей, чтобы узнать подробности.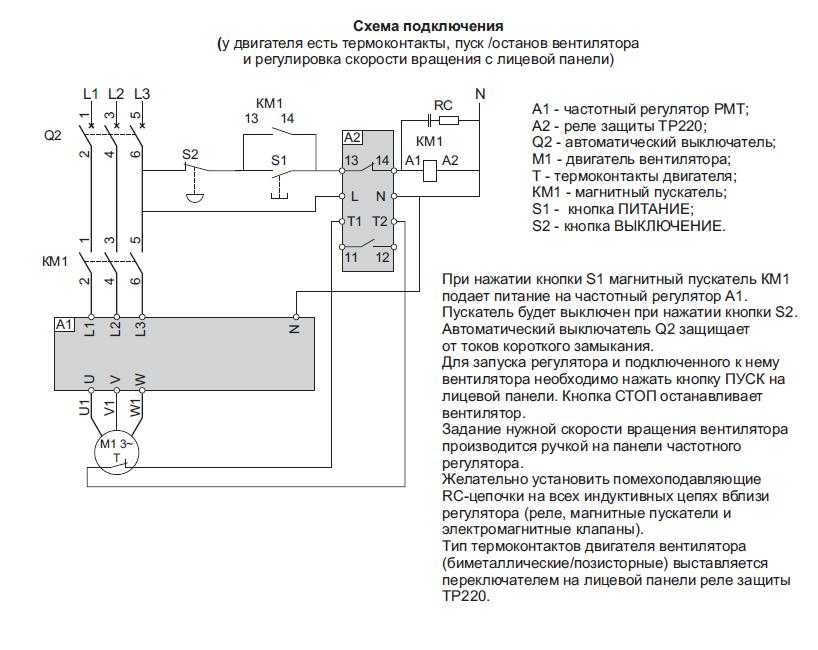
ПРАЙС-ЦЕНА $2,200
ОБЗОР 360°
МОДУЛЬ УПРАВЛЕНИЯ ВЕНТИЛЯТОРОМ ХОЛОДИЛЬНИКА
CFC101 — очень надежный продукт, который будет управлять вентиляторами вашего гидравлического охладителя. Имеется два реле на 80 А, по одному на каждый выход, которые защищены автоматическим выключателем на 30 А. Печатная плата была создана для того, чтобы выдерживать высокие токи, необходимые для привода вентиляторов кулера. Боковые световые индикаторы дадут вам знать, когда вентилятор включен, с дополнительными выходами для внешних световых индикаторов, которые можно установить в удаленном месте. CFC можно активировать с помощью положительного или заземленного входа. Этот продукт имеет размеры 4″X4″X2″ (10,16X10,16X5,08 мм)
ПРАЙС-ЦЕНА $460
УПРАВЛЕНИЕ ВЕНТИЛЯТОРОМ ХОЛОДИЛЬНИКА ОБЗОР НА 360°
EDRJ100 -J1939 БЛОК УПРАВЛЕНИЯ ДВИГАТЕЛЕМ
EDRJ100 — отличный продукт для дистанционного управления двигателем. Он поставляется с тремя заданными скоростями и переменной скоростью вращения. Он также будет управлять дистанционным запуском и остановкой двигателя. Доступны блокировка и ограничение дроссельной заслонки кабины. Мы также включили защиту от превышения скорости ВОМ. Параметры можно запрограммировать с помощью нашего программного обеспечения и нашего комплекта коммуникационного адаптера. Некоторое программирование может быть выполнено внутри. Он совместим с большинством двигателей. Простота установки.
Он поставляется с тремя заданными скоростями и переменной скоростью вращения. Он также будет управлять дистанционным запуском и остановкой двигателя. Доступны блокировка и ограничение дроссельной заслонки кабины. Мы также включили защиту от превышения скорости ВОМ. Параметры можно запрограммировать с помощью нашего программного обеспечения и нашего комплекта коммуникационного адаптера. Некоторое программирование может быть выполнено внутри. Он совместим с большинством двигателей. Простота установки.
ПРАЙС-ЦЕНА $990
EDRJ100 ВИД 360°
EDRJ200 -J1939 БЛОК УПРАВЛЕНИЯ ДВИГАТЕЛЕМ
Основная особенность серии EDRJ200 заключается в том, что она будет работать с переменным аналоговым сигналом от ручного или ножного дросселя для управления оборотами двигателя. Он также будет управлять дистанционным запуском и остановкой двигателя. Доступны блокировка и ограничение дроссельной заслонки кабины. Мы также включили защиту от превышения скорости ВОМ.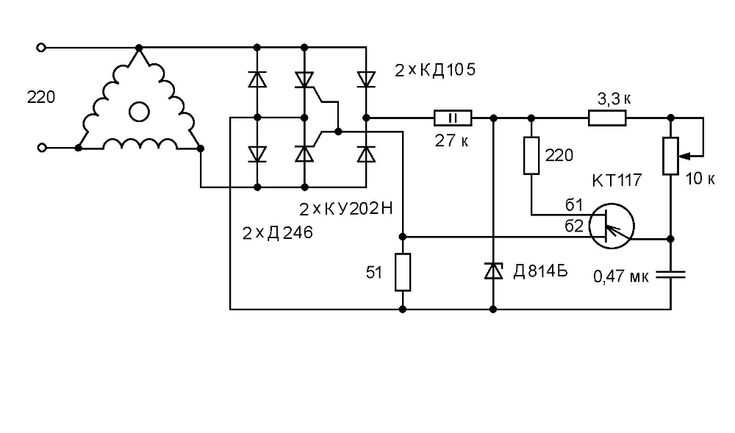 Параметры можно запрограммировать с помощью нашего программного обеспечения и нашего комплекта коммуникационного адаптера. Некоторое программирование может быть выполнено внутри. Он совместим с большинством двигателей. Простота установки.
Параметры можно запрограммировать с помощью нашего программного обеспечения и нашего комплекта коммуникационного адаптера. Некоторое программирование может быть выполнено внутри. Он совместим с большинством двигателей. Простота установки.
ПРАЙС-ЦЕНА $1,104
EDRJ200 ОБЗОР 360°
ГРУППА УПРАВЛЕНИЯ ОБОРОТАМИ
Facebook-f
Твиттер
Google-плюс-г
Инстаграм
Регуляторы дизельного двигателя-генератора
Регуляторы дизельного двигателя-генератора иногда называют регулятором скорости дизельного двигателя. Дизельный двигатель должен поддерживать заданную скорость, чтобы поддерживать выходные характеристики генератора. Если частота вращения двигателя неправильная, генератор не будет поддерживать требуемые выходные характеристики.
В этой статье будут рассмотрены различные типы регуляторов, устанавливаемых на дизель-генераторные установки.
Регуляторы можно разделить на две основные группы:
• Механическое/электрическое управление — в старых генераторных установках используются эти системы управления. Топливная система управляется механическим регулятором.
• Электронное управление. В новых генераторных установках используется электронная система управления. Эта система взаимодействует и управляет функциями управления двигателем и генератором, обеспечивая постоянный и надежный источник питания.
Механическое/электрическое управление
Механические/электрические системы управления были первыми системами управления, внедренными производителями генераторов. Это сопряженное механическое управление двигателем функционирует с потребностями электрической нагрузки генератора. Доступно множество систем управления генераторами, все они работают по одним и тем же принципам проектирования. Ниже представлена система управления Woodward:
• Регулятор Woodward — скорость двигателя механически регулируется центробежным регулятором.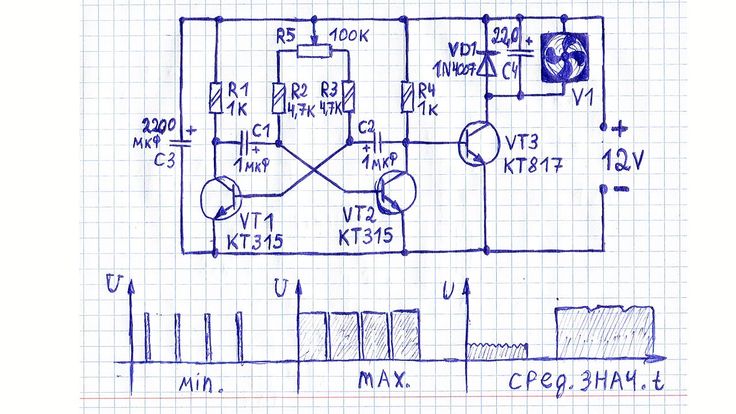 Регулятор получает аналоговые входные сигналы от контроллера.
Регулятор получает аналоговые входные сигналы от контроллера.
• Датчик скорости – магнитный датчик, передающий информацию на контроллер Woodward.
• Контроллер Woodward 2301A — получает сигналы от датчика скорости и передает сигналы регулятору и внешним распределительным щитам, поставляемым заказчиком.
Рис. 1. Система управления Woodward
Эта система управления считается аналоговой системой управления. Системные настройки выполняются с помощью регулировочных винтов, повернутых в определенном направлении для выполнения требуемой настройки. Эта система предлагает управление несколькими генераторами. Генератор (генераторы) подает питание на систему управления распределительным щитом.
Установка дополнительного оборудования может обеспечить удаленную связь и управление системой управления аварийным питанием.
Электронное управление
Разработка и создание генераторов развивались с появлением цифровых технологий. Чтобы проиллюстрировать интерфейс между двигателем и управлением интерфейсом генератора (ов), этот раздел разделен на следующие области:
Чтобы проиллюстрировать интерфейс между двигателем и управлением интерфейсом генератора (ов), этот раздел разделен на следующие области:
• Аналоговый и цифровой сигнал — основная концепция, используемая при представлении генераторной установки с двигателем, оснащенным двигателем ECM ( Электронный модуль управления), но не имеет внутренней системы управления.
• ECM — определение интерфейса между функциями ECM и двигателя для генераторных установок, не оснащенных расширенными средствами управления генератором.
• Элементы управления интерфейсом двигателя и генератора — представляет интегрированный программный пакет для управления двигателем и генератором.
Аналоговый и цифровой сигнал
Важно понимать разницу между аналоговыми и цифровыми сигналами (рис. 2) при обновлении старой аналоговой конфигурации до более новой цифровой конфигурации управления:
• Аналоговый сигнал — сигнал определяется как синусоида. Этот сигнал можно измерить и контролировать через полный цикл высоких и низких пиков. Специальные регулировочные винты позволяют выполнять индивидуальную настройку системы.
Этот сигнал можно измерить и контролировать через полный цикл высоких и низких пиков. Специальные регулировочные винты позволяют выполнять индивидуальную настройку системы.
• Цифровой сигнал — сигнал определяется как прямоугольная волна. Входы и выходы контроллера находятся в двух состояниях:
- ВЫКЛ – от 0 до 2,5 В постоянного тока
- ВКЛ – от 2,6 до 5,0 В постоянного тока
Если требования объекта диктуют необходимость сопряжения аналоговых сигналов с цифровыми сигналами. Инвертор может быть установлен для преобразования цифрового сигнала в аналоговый сигнал. Преобразователь может быть установлен для преобразования аналогового сигнала в цифровой сигнал
Рисунок 2. Аналоговые и цифровые сигналы
ECM
Этот пример иллюстрирует интерфейс между компонентами генераторной установки, которая имеет расширенные средства управления двигателем, но опирается на внешнюю связь с внешней панелью управления (рис. 3). Пример нижеприведенного потока был разработан с использованием информации из схемы промышленных соединений Cummins QSK45/60. Определение компонента ниже:
3). Пример нижеприведенного потока был разработан с использованием информации из схемы промышленных соединений Cummins QSK45/60. Определение компонента ниже:
• ECM — получает входные сигналы и передает выходные сигналы двигателю. Получает входные сигналы от панели управления.
• Двигатель – первичный двигатель генератора. Принимает входные сигналы и передает выходные сигналы в ECM.
• Панель управления – получает входные сигналы от генератора и передает выходные сигналы в ECM.
ECM двигателя является сердцем системы управления двигателем. Он имеет возможность завершить информационный цикл между двигателем, генератором и панелью управления. Цифровые и аналоговые данные, передаваемые между двигателем, ECM и панелью управления, являются входными или выходными. Ниже приведены некоторые примеры:
• Передача данных от двигателя в ECM – датчик частоты вращения коленчатого вала, температуры и охлаждающей жидкости. Топливный насос, распределительная рейка и давление в топливной рампе.
• Передача ECM в двигатель — запуск двигателя, отключение подачи топлива, приводы топливной и распределительной рампы и муфта вентилятора.
• Передача генератора на панель управления — генератор подает напряжение на панель управления для распределения.
• Передача данных с панели управления на ECM — на панели управления находятся компоненты, поставляемые заказчиком.
Сигналы передаются в ECM для регулировки дроссельной заслонки для поддержания требуемой скорости.
Связь между компонентами системы во время сбоя питания для этой системы:
1. Сигнал запуска, отправленный с панели управления (через автоматический переключатель) через ECM на двигатель.
2. Двигатель запускается. ECM контролирует работу двигателя и регулирует подачу топлива для достижения заданной частоты вращения двигателя. ECM может отключить двигатель во время критических отказов двигателя.
3. Генератор подает напряжение на панель управления для распределения. Многие панели управления имеют возможность отслеживать статистику работы генератора.
4. Основное питание восстановлено. Панель управления передает сигнал остановки двигателя в ECM. ECM передает сигнал остановки двигателю. Рис. 3. Усовершенствованный двигатель без элементов управления генератором
Были представлены новые модели генераторов с полным аппаратным обеспечением для мониторинга и управления и вспомогательным программным обеспечением (рис. 4). Добавлены модули для распараллеливания. Такое расположение может быть в резервной конфигурации для критически важных источников аварийного питания. Если один генератор вышел из строя, нагрузка снижается, а другой продолжает поддерживать нагрузку.
В приведенном ниже примере используются два генератора с питанием от генераторов Cummins QSK45. Используемая система управления — PCC 3200. Отдельные модули устройства используются для:
• Топливо (разъем 02) — связь с входными и выходными компонентами топливной системы двигателя.
• Base (разъемы 05 и 06) — связывает входные и выходные компоненты базовой функции ядра.
• Генератор (разъем 01) — передает входные и выходные сигналы генератору.
• Параллельный (разъем 04) — позволяет параллельное подключение нескольких генераторов.
• TB6 — сетевая карта. Позволяет сетевые возможности для каждого генератора в сети.
Последовательность событий при сбое питания проводится в соответствии с основными понятиями, указанными выше в разделе ECM. Отличия:
• Все аппаратное и программное обеспечение генератора содержится в одной операционной системе.
• Возможность параллельного подключения нескольких генераторов.
• Расширенные возможности мониторинга и отчетности.
Рисунок 4. Модуль управления PCC 3200 Рисунок 4. Модуль управления PCC 3200
>>Назад к статьям и информации<<
Контроллеры двигателей – Prosafe
Контроллеры двигателей – Prosafe
Контроллеры двигателя
InteliDrive Nano
Управление двигателем, защита и мониторинг. Простой контроллер запуска / остановки двигателя для двигателей с постоянной скоростью. Автоматический пуск/останов и контроль скорости для двигателей с регулируемой скоростью. Ручная настройка скорости двигателя с помощью регулятора скорости, кнопок вверх/вниз на панели или дистанционно с помощью переключателя. Автоматическое управление оборотами двигателя, например, петля давления. Аналоговый интерфейс для механических двигателей. Интуитивно понятный графический дисплей с иконками без текстовых названий. Превышение скорости, давление масла, температура охлаждающей жидкости, уровень топлива и другие регулируемые защиты. 10 элементов графического журнала истории. Напряжение батареи, время обслуживания и индикация часов работы. МОЖЕТ J1939 интерфейс для двигателей EFI Конфигурация с панели или с помощью инструмента PC DriveEdit через интерфейс USB.
Простой контроллер запуска / остановки двигателя для двигателей с постоянной скоростью. Автоматический пуск/останов и контроль скорости для двигателей с регулируемой скоростью. Ручная настройка скорости двигателя с помощью регулятора скорости, кнопок вверх/вниз на панели или дистанционно с помощью переключателя. Автоматическое управление оборотами двигателя, например, петля давления. Аналоговый интерфейс для механических двигателей. Интуитивно понятный графический дисплей с иконками без текстовых названий. Превышение скорости, давление масла, температура охлаждающей жидкости, уровень топлива и другие регулируемые защиты. 10 элементов графического журнала истории. Напряжение батареи, время обслуживания и индикация часов работы. МОЖЕТ J1939 интерфейс для двигателей EFI Конфигурация с панели или с помощью инструмента PC DriveEdit через интерфейс USB.
- InteliDrive Nano
InteliDrive Nano WP
Управление двигателем, защита и мониторинг. Простой контроллер запуска / остановки двигателя для двигателей с постоянной скоростью. Автоматический пуск/останов и контроль скорости для двигателей с регулируемой скоростью. Ручная настройка скорости двигателя с помощью регулятора скорости, кнопок вверх/вниз на панели или дистанционно с помощью переключателя. Автоматическое управление оборотами двигателя, например, петля давления. Аналоговый интерфейс для механических двигателей. Интуитивно понятный графический дисплей с иконками без текстовых названий. Превышение скорости, давление масла, температура охлаждающей жидкости, уровень топлива и другие регулируемые защиты. Графический журнал истории из 10 элементов, включая коды SPN/FMI. Напряжение аккумулятора, индикация времени обслуживания и часов работы CAN J1939 для двигателей EFI. Конфигурация с панели или с помощью инструмента PC DriveEdit через интерфейс USB.
Автоматический пуск/останов и контроль скорости для двигателей с регулируемой скоростью. Ручная настройка скорости двигателя с помощью регулятора скорости, кнопок вверх/вниз на панели или дистанционно с помощью переключателя. Автоматическое управление оборотами двигателя, например, петля давления. Аналоговый интерфейс для механических двигателей. Интуитивно понятный графический дисплей с иконками без текстовых названий. Превышение скорости, давление масла, температура охлаждающей жидкости, уровень топлива и другие регулируемые защиты. Графический журнал истории из 10 элементов, включая коды SPN/FMI. Напряжение аккумулятора, индикация времени обслуживания и часов работы CAN J1939 для двигателей EFI. Конфигурация с панели или с помощью инструмента PC DriveEdit через интерфейс USB.
- InteliDrive Nano WP
InteliDrive IPU
Контроллер двигателя для наземных и морских приложений уровня 4. Управление, мониторинг и защита механических и электронных дизельных/газовых двигателей в одном устройстве. Автоматический, ручной или дистанционный запуск/остановка двигателя. Поддержка двигателей с электронным блоком управления (ECU) J1939 или Cummins Modbus. Аналоговое давление масла, температура воды, уровень топлива, напряжение аккумулятора, обороты двигателя (подхват). Плавное управление скоростью двигателя с помощью кнопок контроллера Up/Down, бинарных входов для предопределенных вариантов скорости, бинарных входов Speed Up/Down или одного аналогового входа. Выбираемые защиты тревоги/отключения. 3 уровня защиты паролем. Связь Ethernet, USB, GSM/GPRS, RS485 или RS232/модем/Modbus. Автоматическое СМС при тревоге
Автоматический, ручной или дистанционный запуск/остановка двигателя. Поддержка двигателей с электронным блоком управления (ECU) J1939 или Cummins Modbus. Аналоговое давление масла, температура воды, уровень топлива, напряжение аккумулятора, обороты двигателя (подхват). Плавное управление скоростью двигателя с помощью кнопок контроллера Up/Down, бинарных входов для предопределенных вариантов скорости, бинарных входов Speed Up/Down или одного аналогового входа. Выбираемые защиты тревоги/отключения. 3 уровня защиты паролем. Связь Ethernet, USB, GSM/GPRS, RS485 или RS232/модем/Modbus. Автоматическое СМС при тревоге
- InteliDrive IPU
InteliDrive IPC
Контроллер двигателя и насоса для наземных и морских приложений уровня 4. Управление, мониторинг и защита как механических, так и электронных дизельных/газовых двигателей в одном устройстве. Автоматический, ручной или дистанционный запуск/остановка двигателя. Поддержка двигателей с электронным блоком управления (ECU) J1939 или Cummins Modbus.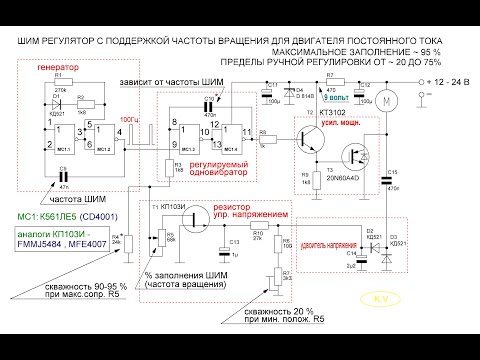 Аналоговое давление масла, температура воды, уровень топлива, напряжение аккумулятора, обороты двигателя (подхват). Плавное управление скоростью двигателя с помощью кнопок контроллера Up/Down, бинарных входов для предопределенных вариантов скорости, бинарных входов Speed Up/Down или одного аналогового входа. Функции насоса: расходомер, реле расхода, набор гибких таймеров. Выбираемые защиты тревоги/отключения.
Аналоговое давление масла, температура воды, уровень топлива, напряжение аккумулятора, обороты двигателя (подхват). Плавное управление скоростью двигателя с помощью кнопок контроллера Up/Down, бинарных входов для предопределенных вариантов скорости, бинарных входов Speed Up/Down или одного аналогового входа. Функции насоса: расходомер, реле расхода, набор гибких таймеров. Выбираемые защиты тревоги/отключения.
- InteliDrive IPC
InteliDrive Telecom
Контроллер двигателя для телекоммуникационных вышек. Управление, мониторинг и защита как механических, так и электронных дизельных/газовых двигателей в одном устройстве. Автоматический или ручной запуск/остановка двигателя. Программируемая кнопка включения/выключения на панели. Поддержка двигателей с электронным блоком управления (ECU) J1939 или Cummins Modbus. Аналоговые манометры (VDO, Datcon и др.) удобны для оператора. Плавная регулировка оборотов двигателя. 7 настраиваемых бинарных входов.
- InteliDrive Telecom
InteliDrive Lite
Контроллер двигателя для наземных и морских приложений уровня 4. Управление, мониторинг и защита как механических, так и электронных дизельных/газовых двигателей в одном устройстве. Автоматический или ручной запуск/остановка двигателя. Программируемая кнопка включения/выключения на панели. Поддержка двигателей с электронным блоком управления (ECU) J1939 или Cummins Modbus. Аналоговые манометры (VDO, Datcon и др.) удобны для оператора. Плавная регулировка оборотов двигателя. 7 настраиваемых бинарных входов.
Управление, мониторинг и защита как механических, так и электронных дизельных/газовых двигателей в одном устройстве. Автоматический или ручной запуск/остановка двигателя. Программируемая кнопка включения/выключения на панели. Поддержка двигателей с электронным блоком управления (ECU) J1939 или Cummins Modbus. Аналоговые манометры (VDO, Datcon и др.) удобны для оператора. Плавная регулировка оборотов двигателя. 7 настраиваемых бинарных входов.
- InteliDrive Lite
InteliDrive Lite EM
Управление электродвигателем, контроль и защита. Управление двигателем, контроль и защита. Все распространенные способы пуска асинхронного двигателя: прямой, Y-D, плавный пуск. 7 настраиваемых бинарных входов и выходов. 3 настраиваемых аналоговых входа. Выбираемые защиты тревоги/отключения. Уставки настраиваются с помощью клавиатуры или ПК. Связь через USB, RS485 или RS232, GSM/GPRS, ModBus. Часы реального времени и журнал истории событий
- InteliDrive Lite EM
InteliDrive Lite FPC
Модульный контроллер двигателя, разработанный для дизельных пожарных насосов на основе стандарта NFPA 20. Последовательность автоматического и ручного запуска на основе двух аккумуляторов в соответствии со стандартом NFPA 20. Поддержка двигателей, оснащенных электронным блоком управления (ЭБУ) J1939 или интерфейсом Cummins Modbus. Аналоговые манометры (VDO, Datcon) удобны для оператора. Контроль оборотов двигателя. 3 настраиваемых аналоговых входа + 2 аналоговых входа измерения напряжения батареи. 7 настраиваемых бинарных входов и выходов. 6 светодиодных индикаторов (Тревога, Предупреждение, Не готов, Работает, Батарея A, Батарея B). Выбираемые защиты тревоги/отключения.
- InteliDrive Lite FPC
InteliDrive CCU
Модульная система для контроля, мониторинга и защиты соотношения воздух-топливо газовых двигателей. Поддержка двигателей с EFI (ECU) CAN/J1939 или Cummins Modbus. Запись истории, управляемая событиями. Контроль скорости. Измерение двигателя от датчиков или через J1939. 14 бинарных входов, 14 бинарных выходов, 8 аналоговых входов. Через дополнительные модули доступно более 100 бинарных входов и выходов. 3-уровневая защита паролем. Дистанционное управление и мониторинг через аналоговый/GSM-модем, SMS или Интернет.
- Центральный блок управления InteliDrive
InteliDrive DCU Industrial
Контроллер двигателя для наземных приложений с питанием от компрессоров и насосов с приводом от двигателя. Управление, мониторинг и защита как механических, так и электронных дизельных/газовых двигателей, а также периферийного оборудования в одном устройстве. Поддержка двигателей с EFI (ECU) CAN/J1939 или Cummins Modbus. Запись истории, управляемая событиями. Контроль скорости. Измерение двигателя от датчиков или через J1939. 14 бинарных входов, 14 бинарных выходов, 8 аналоговых входов. Через дополнительные модули доступно более 100 бинарных входов и выходов.
- InteliDrive DCU Промышленный
InteliDrive DCU Marine
Управление, контроль и защита судовых двигателей. Поддержка двигателей с EFI (ECU) CAN/J1939 или Cummins Modbus. Для аварийных, вспомогательных, портовых и маршевых двигателей. Резервная архитектура: основной блок + резервный модуль. Резервный модуль ID-RPU с аппаратной защитой. Подключение к двигателю через основную шину J1939 и резервную шину J1587. Симметричное распределение нагрузки для маршевых двигателей с J1939 (через CAN-шину). Запись истории, управляемая событиями
- InteliDrive DCU Marine
InteliDrive Mobile
Управление дизельными/газовыми двигателями, мониторинг и защита для внедорожных приложений, таких как строительство, разработка карьеров и инженерное оборудование. Управление гидравлическими системами и компрессорами и насосами с приводом от двигателя. Конструкция устройства, предназначенного для суровых условий, имеет полностью герметичный корпус и разъем. Plug & Play Поддержка двигателя EFI (ECU) (CAN/J1939). Поддержка концепции Master Slave. Поддержка удаленного мониторинга. Управление автопарком через GPRS/GPS, GeoFencing. Встроенные функции ПЛК: аналоговые переключатели, компараторы с задержкой или гистерезисом, счетчики, функции задержки, фильтры, линейная интерполяция, логические и математические функции, контуры ПИД, таймеры.
- InteliDrive Mobile
Мобильный регистратор InteliDrive
Выдающийся регистратор данных, мониторинг и отслеживание истории для дизельных двигателей, а также периферийного оборудования. Plug and play поддержка двигателей с доступом ECU ко всем доступным значениям. Встроенный журнал событий и производительности. Поддержка удаленного мониторинга. Программа управления автопарком с локализацией GSM/GPS и геозоной. Выход из истории. Измерение двигателя датчиками и исполнительными механизмами или через J1939. 8 Двоичные входы. 11 настраиваемых аналоговых входов. 1 х частотный вход для измерения оборотов.
- Мобильный регистратор InteliDrive
Если у вас есть вопросы по покупке бизнес-полиса и условиям консультирования, звоните нам в любое время.
+91 9810781607
Отправить сообщение
Управление скоростью двигателя — imperix
Содержание
В этом техническом примечании объясняется, как реализовать управление скоростью электродвигателя. Во-первых, в примечании представлены общие принципы управления скоростью двигателя независимо от типа используемого двигателя. Затем регулятор скорости настраивается методом симметричного оптимума. Наконец, представлена практическая реализация управления электроприводом лабораторного масштаба (двигатель и инвертор), нацеленная на B-Box RCP или B-Board PRO с ACG SDK на Simulink. Обратите внимание, что компания imperix предлагает готовую к использованию систему привода двигателя для разработки и тестирования методов управления двигателем. Более подробную информацию можно найти в кратком руководстве Motor Testbench.
Общие принципы управления скоростью двигателя
Электрический двигатель можно механически смоделировать как вращающуюся массу. Его инерция \(J_m\) можно повернуть, приложив к нему крутящий момент, который представляет собой разницу между электромагнитным крутящим моментом \(T_{em}\) и моментом нагрузки \(T_L\). Нагрузка является внешней по отношению к двигателю и не может управляться. Однако скорость ωm двигателя можно изменить, управляя электромагнитным моментом.
Физика вращающегося двигателя
Соотношение между скоростью, инерцией и крутящим моментом формализуется вторым законом Ньютона для вращательного движения [1]:
$$(1) \qquad k_F \omega _m + J_{m} \frac{d \omega _m}{dt} = T_{em} – T_L $$
\(T_L\) момент внешней нагрузки приложенный к валу и \(k_F \omega_m\) – крутящий момент из-за трения. Тогда передаточная функция, связывающая крутящий момент со скоростью:
$$(2) \qquad H_1 (s) = \frac{\omega _m(s)}{T_{em}(s) – T_L} = \frac {1/k_F}{1 + s \space J_m/k_F} = \frac{K_{1}}{1 + s \space T_{1}} $$
по сравнению с нагрузкой и крутящим моментом двигателя. В этом случае передаточная функция упрощается до:
$$ (3) \qquad H_2 (s) = \frac{\omega _m(s)}{T_{em}(s) – T_L} = \frac{1}{s \space J_m} = \frac {1}{s \space T_{2}} $$
Настройка цифрового регулятора скорости
В соответствии с передаточной функцией, полученной выше, установка представляет собой систему 1 st заказов. Следовательно, ПИ-регулятора достаточно, чтобы следовать постоянному заданию без постоянной ошибки. Поскольку упрощенный объект из (3) содержит чистый интегратор, пропорциональные и интегральные члены настраиваются с помощью 92 / Т_2\\[5pt]
\displaystyle K_p &= T_n \space / \space T_i \\[5pt]
\displaystyle K_i &= 1 \space / \space T_i
\end{массив} \right. $$
Параметр Ttot представляет общую задержку дискретного управления, которую можно вычислить с помощью PN142. Численный пример представлен ниже.
Критерий симметричного оптимума чувствителен к резким изменениям эталонного значения. В этом случае можно использовать корректор уставки, чтобы уменьшить перерегулирование [2]:
$$(5) \qquad H_{setpoint,corrector}(s) = \frac{1}{1 + s \space T_2} $$
Альтернативой является использование ограничителя скорости для ограничения скорости изменения задание скорости двигателя.
Каскадное управление крутящим моментом и скоростью двигателя
Контроллер скорости двигателя генерирует только задание крутящего момента и поэтому должен каскадироваться с контроллером крутящего момента, чтобы воздействовать на двигатель. Контроллер крутящего момента может быть реализован с использованием, например, поля-ориентированного управления или прямого управления крутящим моментом (AN004).
Как описано выше, настройка регулятора скорости зависит от общей задержки управления, которую можно вычислить, как в PN142. В случае управления скоростью двигателя регулятор скорости является внешним контуром управления, а регулятор крутящего момента — внутренним контуром.
Общая схема каскадного управления показана ниже.
Управление скоростью двигателя — схема каскадного управления
Реализация управления скоростью с помощью ACG SDK на Simulink
ACG SDK — это набор инструментов для Simulink и PLECS, который обеспечивает быстрое и простое графическое программирование контроллера силовой электроники B-Box или B-Board. В этом разделе описывается реализация управления скоростью двигателя и ее экспериментальная проверка с помощью инструментов прототипирования imperix. Модели Simulink и PLECS можно скачать ниже:
TN114_Motor_Speed_Control_simulink. zip Download
TN114_Motor_Speed_Control.plecs Download
Каскадное управление скоростью двигателя
На рисунке ниже показана реализация каскадной структуры управления с поле-ориентированным управлением в качестве регулятора крутящего момента. Конечный автомат (FSM) наблюдает за работой двигателя. В частности, FSM получает желаемую скорость (в об/мин) от пользователя и ограничивает скорость ее изменения, чтобы уменьшить перерегулирование регулятора скорости.
Реализация Simulink каскадного управления скоростью двигателя
Структура регулятора скорости двигателя
В этом примере приложения регулятор скорости работает в 100 раз медленнее, чем управление крутящим моментом. Таким образом, контроллер крутящего момента имеет в своем распоряжении достаточно времени, чтобы отрегулировать токи статора до того, как будет обновлено задание от регулятора скорости. Обратите внимание, что при использовании FOC задание крутящего момента должно быть преобразовано в текущее задание с использованием уравнения, разработанного в TN111. {-1} \end{массив} \right. $$ 92} $$
Определение задержек в цепочке каскадного управления объясняется в PN142. В этой реализации Simulink внешний цикл был выбран в N = 100 раз медленнее, чем внутренний цикл. Следовательно, различные задержки:
$$(8) \qquad \left\{ \begin{array} \displaystyle T_{sens} \приблизительно 0 \\[5pt] \displaystyle T_{ctrl} = N \times T_s = \cfrac{100}{20 \, \text{кГц}} = 5 \,\text{мс}\\[5pt] \displaystyle T_{PWM} = \cfrac{T_{sw}}{2} = \ cfrac{1}{2 \times 20 \, \text{kHz}} = 25 \,\text{µs} \end{array}\right.$$ 9{-1} \\[5pt]
\displaystyle K_p &= T_n \space / \space T_i = 0,029 \, \text{N}\,\text{m}\,\text{s}\\[5pt]
\displaystyle K_i &= 1 \space / \space T_i = 1,43 \,\text{N}\,\text{m}
\end{массив} \right. $$
Экспериментальные результаты
Экспериментальная установка состоит из СДПМ, питаемого от инвертора источника напряжения, управляемого контроллером прототипа B-Box. Управление ВОК реализовано с помощью графического программирования библиотеки ACG SDK для Simulink. Преобразователь мощности состоит из 4 модулей фазных ветвей PEB 8032 (3 фазы и 1 ветвь тормозного прерывателя). Другой СДПМ, подключенный к 3 силовым резисторам, используется в качестве тормоза для создания момента нагрузки.
Испытательный стенд электродвигателя с инверторным контроллером. Стенд двигателя и тормоз
Параметры двигателя
Контроллер скорости двигателя был проверен на синхронном двигателе с постоянными магнитами Unimotor fm (PMSM) от Control Techniques.
| Parameter | Value | Unit |
| Rated power | 1.23 | kW |
| Pole pairs | 3 | – |
| Rated phase voltage | 460 | V |
| Rated phase current | 2.7 | A |
| Rated mechanical speed | 314 | rad/s |
| Rated torque | 3,9 | нм |
| Сопротивление статора | 3,4 | Ом |
| Индуктивность статора (D и QAXIS) | ||
| Индуктивность статора (D и QAXIS) | ||
| Permanent magnet flux that encircles the stator winding | 0.25 | Wb |
| Moment of inertia (PMSM only) | 2.9 | kg cm 2 |
Physical parameters of motor: Control techniques 095U2B300BACAA100190
Условия испытаний
- Крутящий момент нагрузки: 2 Нм (PMSM с резисторами в качестве нагрузки)
- Напряжение промежуточного контура: 500 В
- Инвертор: 4x PEB8032 (одна ножка для тормозного прерывателя)
- Частота прерывания и выборки: 20 кГц
- Фаза выборки: 0,5
- Выходы ШИМ: на основе несущей
- Метод управления крутящим моментом: Поле-ориентированное управление (FOC)
Результаты
Отслеживание скорости двигателя было подтверждено экспериментально путем применения шага задания скорости от 0 до 1500 об/мин. Эксперимент проводился дважды с двумя разными ограничениями по скорости.
Сначала ограничитель скорости был установлен на 100000 об/мин. Как показано ниже, СДПМ не может разогнаться с такой скоростью, потому что регулятор скорости достигает своего верхнего предела насыщения (1,1 о.е. номинального крутящего момента). Кроме того, тюнинг от симметричный оптимум критерий приводит к перерегулированию на 21%.
Для второго запуска эталонное изменение было ограничено 5000 об/мин. В этом случае управление скоростью может следовать за ускорением задания скорости. Поскольку в управлении используется ПИ-регулятор порядка 1 st , он не может полностью устранить ошибку отслеживания во время рампы. Однако это имеет то преимущество, что механическая нагрузка на двигатель также снижается, поскольку система управления не применяет резко высокий крутящий момент при запуске. Более того, перерегулирование также снижено до 4,7%. Единственным недостатком по сравнению с первым экспериментом является увеличенное время установления 0,4 с по сравнению с 0,3 с.
Выбор ограничения опорной скорости является компромиссом между временем установления и механическим напряжением, вызванным внезапным изменением крутящего момента.
Академические ссылки
[1] Слободан Н. Вукосавич, «Цифровое управление электрическими приводами», Springer, 2007, ISBN 978-0-387-25985-7
[2] Хансруди Бюлер, «Réglage de systèmes d’ électronique de puissance — Том 1: теория », Presses Polytechniques et Universitaires Romandes, 1997, ISBN-10: 2-88074-341-9
ШИМ-модуль контроллера скорости двигателя постоянного тока TECHMAKERS
Продукт
Описание
Отзывы (0)
Что в коробке
Описание
Выделять
(A) Регулируемый переключатель Контроллер скорости двигателя постоянного тока 3–35 В 12 В 24 В PWM Сверхмалый светодиодный диммер вентилятора Регулятор скорости двигателя постоянного тока
Спецификация:
Новый
Размер модуля: прибл. 30*24 мм
Рабочее напряжение: 3–35 В пост. тока
Макс. выходной ток: 5 А
Мощность управления: макс. 90 Вт
Ток покоя 0,015 А (в режиме ожидания)
Рабочий цикл ШИМ: частота ШИМ 1–104 %
0 : 10 кГц
Тонкое мастерство и хорошая производительность.
Стабильный и надежный.
Простота использования.
Долгий срок службы.
(C)
Напряжение: 5–16 В пост. тока
Непрерывный ток: 10 А
Кратковременный максимальный ток: 20 А (менее 10 секунд) отрегулируйте свет
Режим управления: потенциометр управления скоростью (нажатие по часовой стрелке открыто, продолжайте вращать по часовой стрелке от 1% до 99% скорости)
Рабочий цикл: 0%-99% (положение 0% — это состояние выключателя, когда потенциометр находится крайне слева).
При включенном токе 0,002А (долгое время не нужно выключать говернор нет тока).
Эффективность: максимальная эффективность достигает 98%.
Объем: длина 3 см (без потенциометра), ширина 2 см, высота 1,4 см (ШИМ) Напряжение постоянного тока с регулировкой рабочего цикла от 0% до 100%. Он также имеет встроенный предохранитель самовосстановления 2A и светодиодный индикатор включения питания.
Технические характеристики:
Входное напряжение питания: 1,8–15 В постоянного тока
Максимальная выходная мощность: 30 Вт
Макс. непрерывный выходной ток: 2 А
Регулируемый рабочий цикл: 0–100 %
Размер: 5 x 3 x 1,5 см
(F)
6–28 В пост. Вы можете управлять направлением двигателя постоянного тока, используя постоянное напряжение постоянного тока с широтно-модулированной модуляцией (ШИМ) с полностью регулируемым рабочим циклом от 0% до 100%.
Контроллер скорости двигателя может легко обеспечить непрерывный ток 3 А для вашего двигателя CONTINUANT CORRENT или другой нагрузки постоянного тока.
Технические характеристики:
Источник питания: 6–28 В пост. тока
Максимальная выходная мощность: 80 Вт
Максимальный непрерывный выходной ток: 3 А
Регулируемый рабочий цикл: 0–100 %
(A) Регулируемый переключатель Регулятор скорости двигателя постоянного тока 3–35 В 12 В 24 В ШИМ Сверхмалый светодиод Диммер вентилятора Регулятор скорости двигателя постоянного тока
Спецификация:
Новый
Размер модуля: прибл. 30*24 мм
Рабочее напряжение: 3–35 В пост. тока
Макс. выходной ток: 5 А
Мощность управления: макс. 90 Вт
Ток покоя 0,015 А (в режиме ожидания)
Рабочий цикл ШИМ: частота ШИМ 1–104 %
0 : 10 кГц
Тонкое мастерство и хорошая производительность.
Стабильный и надежный.
Простота использования.
Долгий срок службы.
(К)
Напряжение: 5–16 В пост. тока
Непрерывный ток: 10 А
Кратковременный максимальный ток: 20 А (менее 10 секунд)
Режим управления скоростью: бесступенчатая ШИМ-регулировка скорости, также может использоваться для регулировки освещения
Режим управления: потенциометр управления скоростью (открывается по часовой стрелке, продолжает вращаться по часовой стрелке от 1 % до 99 % скорости)
Рабочий цикл: 0–99 % (положение 0 % — это состояние выключателя, когда потенциометр находится крайне слева) .
При включенном токе 0,002А (долгое время не нужно выключать говернор нет тока).
Эффективность: максимальная эффективность достигает 98%.
Объем: длина 3 см (без потенциометра), ширина 2 см, высота 1,4 см (ШИМ) Напряжение постоянного тока с регулировкой рабочего цикла от 0% до 100%. Он также имеет встроенный предохранитель самовосстановления 2A и светодиодный индикатор включения питания.
Технические характеристики:
Входное напряжение питания: 1,8–15 В постоянного тока
Максимальная выходная мощность: 30 Вт
Макс. непрерывный выходной ток: 2 А
Регулируемый рабочий цикл: 0–100 %
Размер: 5 x 3 x 1,5 см
(F)
6–28 В пост. Вы можете управлять направлением двигателя постоянного тока, используя постоянное напряжение постоянного тока с широтно-модулированной модуляцией (ШИМ) с полностью регулируемым рабочим циклом от 0% до 100%.
Контроллер скорости двигателя может легко обеспечить непрерывный ток 3 А для вашего двигателя CONTINUANT CORRENT или другой нагрузки постоянного тока.