Содержание
Способы регулирования скорости асинхронного двигателя
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
- напряжения подаваемого на статор,
- вспомогательного сопротивления цепи ротора,
- числа пар полюсов,
- частоты рабочего тока.


Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 — частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 — коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором.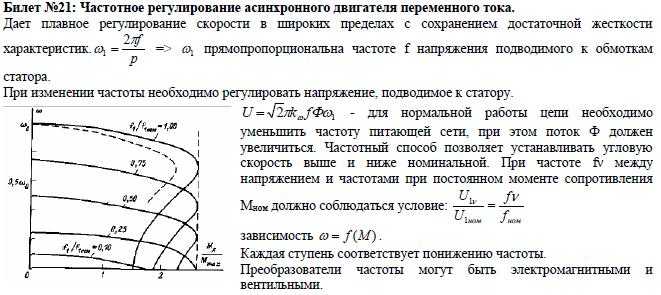 Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
- укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
- применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2 : 1 = р2 : pt , 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2 : 1 = Рг : Pi , 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
• Скачать схемы обмоток многоскоростных асинхронных двигателей
• Скачать лекцию «Регулирование частоты вращения асинхронных двигателей»
Свежие записи:
Регулирование частоты вращения асинхронного двигателя
Общие сведения. Технологический процесс часто требует изменения частоты вращения исполнительного механизма. С этой целью широко применяются коробки скоростей, которые усложняют кинематику провода, вызывают вибрацию системы и увеличивают инерционность привода. Для повышения точности обработки и увеличения производительности целесообразно использовать регулировочные свойства двигателей. В асинхронных двигателях частота вращения определяется из равенства
где n1 = 60f 1 / р.
Из этого равенства следует, что изменять п можно тремя способами: изменением частоты f1 , числа пар полюсов р и скольжения s. Частоту вращения ротора в принципе можно регулировать изменением напряжения питания U1. Однако с увеличением U1 появляется опасность превышения допустимой температуры нагрева двигателя, а с уменьшением U1 уменьшается перегрузочная способность двигателя.
Регулирование изменением частоты (частотное регулирование). Этим способом изменение частоты вращения ротора п осуществляется за счет изменения частоты питающего напряжения f1.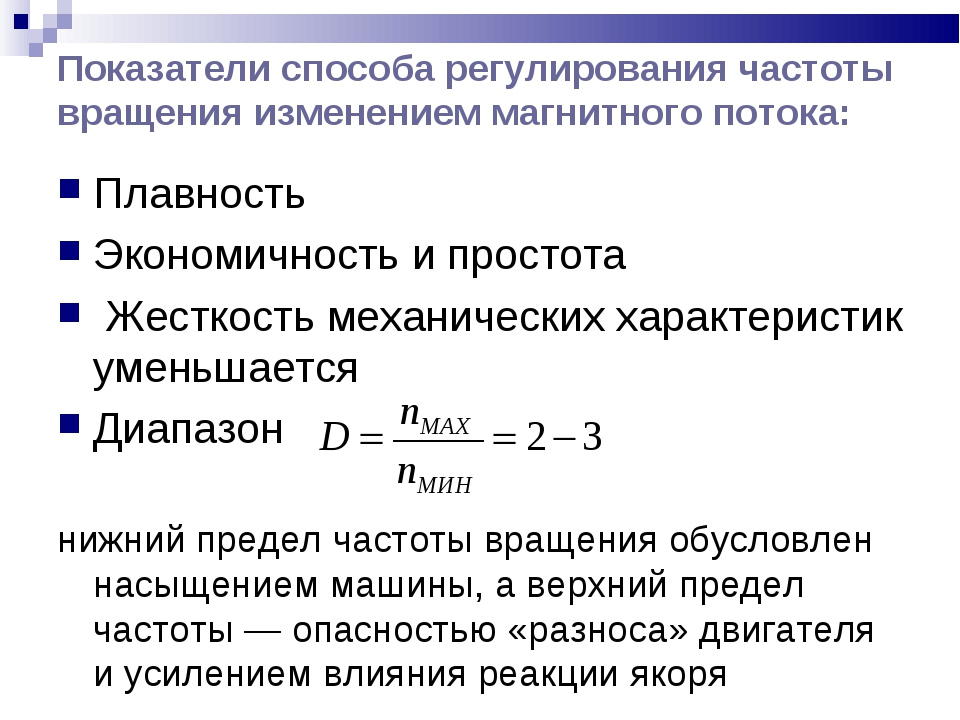 Это возможно потому, что скольжение в номинальном режиме составляет всего 2—8 %.
Это возможно потому, что скольжение в номинальном режиме составляет всего 2—8 %.
Для изменения частоты f1 могут применяться машинные и полупроводниковые (тиристорные) преобразователи. На рис. 3.36 показана схема машинного преобразователя. Асинхронный двигатеь АД с постоянной частотой вращает генератор постоянного тока Г, работающий в системе генератор — двигатель. Генератор Г питает двигатель Д постоянного тока, частота вращения которого регулируется током возбуждения генератора Г и двигателя Д.
Двигатель вращает с различными частотами синхронный генератор СГ, частота выходного напряжения которого f1 = n1p/60 изменяется. В результате АД изменяет частоту вращения рабочего механизма. Этот способ позволяет плавно изменять частоту вращения АД. Недостатками способа являются высокая стоимость преобразователя, низкий КПД установки из-за многократного преобразования энергии, сравнительно небольшой диапазон регулирования.
Частотное тиристорное регулирование. Значительно больший эффект при частотном регулировании достигается применением тиристорных преобразователей. На рис. 3.37 показана схема такого регулирования. Тиристорный преобразователь ТП питается от трехфазной сети с постоянными значениями напряжения U1 и частоты f1.
На выходе преобразователя получается постоянное варьируемое напряжение U1c. Это напряжение подается на блок инвертора И, на выходе которого появляется регулируемое переменное напряжение U1v при частоте f1v.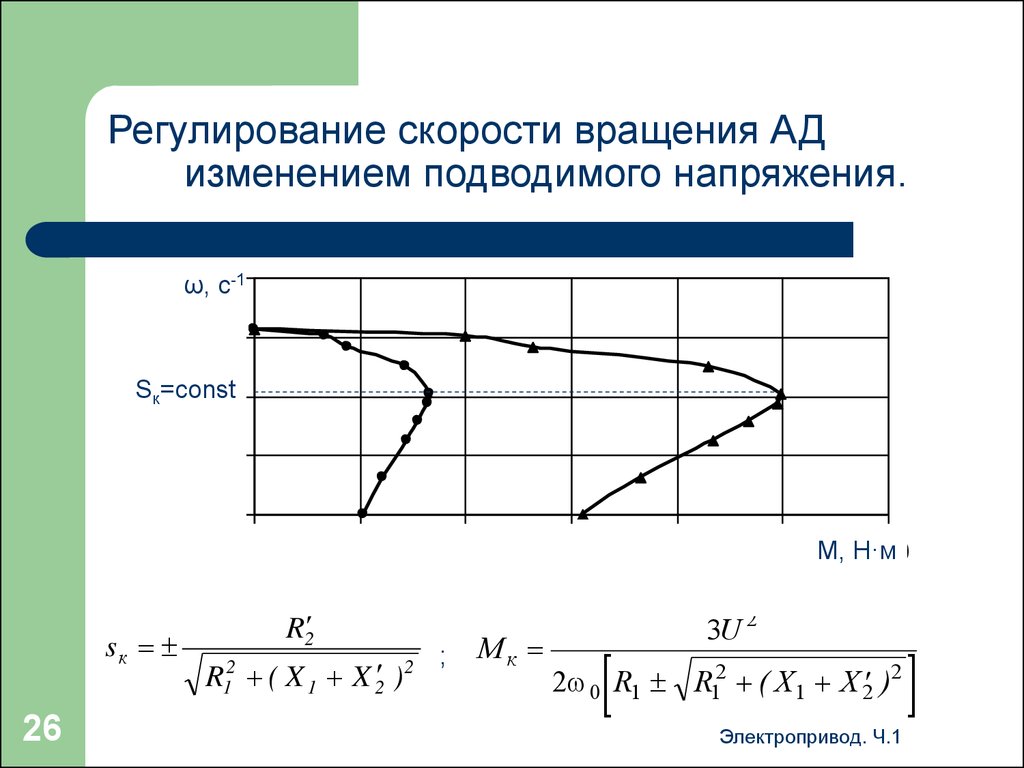 Напряжение U1v подается на асинхронный двигатель АД.
Напряжение U1v подается на асинхронный двигатель АД.
Для автоматизации процесса регулирования необходимо дополнительно иметь блок задания частоты БЗЧ и блоки управления напряжением УН и частотой УЧ.
Для поддержания точного значения скорости целесообразно иметь обратную связь по частоте с выхода АД на блок задания частоты.
Регулирование изменением числа полюсов.
Асинхронный двигатель не имеет явно выраженных полюсов и поэтому его число полюсов зависит от схемы соединения катушек в обмотках каждой фазы статора.
Если, например, обмотка фазы состоит из двух катушек, то при их последовательном соединении число пар полюсов р = 2, а при параллельном соединении р = 1. Начала и концы катушек выводятся на клеммы щитка, так что переключение катушек можно делать на работающем двигателе.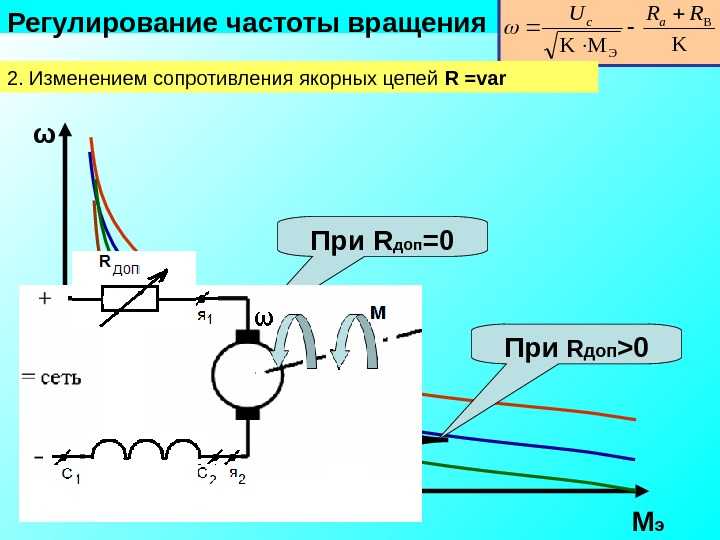 Можно разместить в пазах статора две независимые обмотки, каждая из которых создает разное число пар полюсов, например, р = 1 и р = 2.
Можно разместить в пазах статора две независимые обмотки, каждая из которых создает разное число пар полюсов, например, р = 1 и р = 2.
Одна из обмоток может, например, соединяться в одинарную звезду, а другая – в двойную звезду (рис. 3.38, а и б). Можно также переключать треугольник в двойную звезду (рис. 3.39, а и б).
В результате двигатель будет трехскоростной. В принципе можно разместить на статоре две обмотки, каждая из которых имеет две скорости, такая машина будет четырехскоростной. Однако размещение нескольких обмоток увеличивает габариты и стоимость машины. Поэтому лучше применять одну обмотку с переключением на четыре скорости. При этом можно получить синхронные скорости 3000 / 1500 / 1000 / 500 или 1500 / 1000 / 750 / 500 об/мин или другие комбинации.
Регулирование изменением числа полюсов является ступенчатым регулированием. Механические характеристики при разном числе пар полюсов показаны на рис. 3.40. Этот способ регулирования экономичен, рабочая часть характеристик жесткая, но данный способ применяется лишь в случаях, не требующих плавного регулирования, например в станках, где ступенчатое регулирование применяется с целью уменьшения числа ступеней в коробках скоростей, вентиляторах, насосах и др.
3.40. Этот способ регулирования экономичен, рабочая часть характеристик жесткая, но данный способ применяется лишь в случаях, не требующих плавного регулирования, например в станках, где ступенчатое регулирование применяется с целью уменьшения числа ступеней в коробках скоростей, вентиляторах, насосах и др.
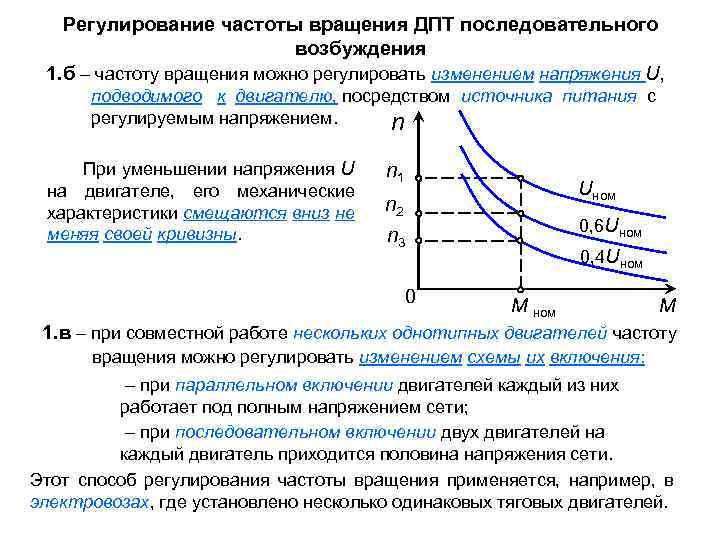
Регулирование частоты вращения изменением подводимого напряжения. При уменьшении напряжения U момент двигателя уменьшается пропорционально U2. В связи с этим изменяются механические характеристики, уменьшается критический момент Mк , при постоянном моменте сопротивления увеличивается скольжение и уменьшается частота вращения ротора.
Уменьшать напряжение U можно включением в цепь статора реостатов (рис. 3.41, а), автотрансформаторов (рис. 3.41,6) или регулируемых дросселей (рис. 3.41, в). При включении реостатов в них теряется значительная мощность (RI2).
3.41, в). При включении реостатов в них теряется значительная мощность (RI2).
Автотрансформаторы дают возможность регулировать частоту вращения лишь вручную.
Регулируемые дроссели позволяют автоматизировать этот процесс, для чего их цепь
подмагничивания включается в систему автоматического регулирования.
Данный метод применяется только у двигателей малой мощности, так как при этом способе регулирования уменьшается КПД двигателя, уменьшается критический момент, а диапазон регулирования сравнительно небольшой.
Регулирование изменением сопротивления цепи ротора R2 (реостатное регулирование). Этот способ применим только для двигателей с фазным ротором. Такое регулирование связано с изменением скольжения s в соответствии с зависимостью п = п1 (1 — s).
Из формул ( 3.26) и ( 3.28) следует, что с увеличением R2 угол наклона механической характеристики увеличивается, а критический момент остается постоянным (Mк = const).
На рис. 3.42 представлено семейство характеристик п(М) при различных R2 . Если момент нагрузки Mc = const, то частота вращения n с увеличением R2 падает, а скольжение увеличивается.
Этот способ регулирования имеет ряд недостатков: дополнительные потери энергии в реостате, механические характеристики становятся мягкими, относительно малый диапазон регулирования.
РЕГУЛИРОВАНИЕ СКОРОСТИ ДВИГАТЕЛЕЙ | Wattco
Существует множество приборов, которые являются частью нашей жизни, от бытовых электроприборов, таких как пылесосы и фены, до насосов, конвейерных лент и станков на крупных промышленных предприятиях. Везде, где в каких-либо машинах используются электродвигатели, некоторый тип управления скоростью двигателя неизменно является частью этой машины.
Регулятор скорости двигателей переменного тока
Асинхронный двигатель переменного тока по существу представляет собой устройство с постоянной скоростью. Скорость вращающегося магнитного поля называется синхронной скоростью. Синхронная скорость (S) двигателя определяется как S = 120(F) ÷ P, где (F) — частота входящей сети, а (P) — число полюсов в двигателе.
Скорость вращающегося магнитного поля называется синхронной скоростью. Синхронная скорость (S) двигателя определяется как S = 120(F) ÷ P, где (F) — частота входящей сети, а (P) — число полюсов в двигателе.
Поскольку в Соединенных Штатах частота сети переменного тока составляет 60 Гц при напряжении 120 В, поэтому асинхронный двигатель переменного тока с четырьмя полюсами будет иметь синхронную скорость 1800 об/мин. Однако в полевых условиях, когда к двигателю приложена нагрузка, он будет работать со скоростью менее 1800 об/мин. Эта разница в скорости называется скольжением и обычно выражается в процентах. Поскольку количество полюсов в машине фиксировано, единственная переменная, которую остается изменить, — это частота входящей линии — это основа работы регулятора скорости двигателя, известного как частотно-регулируемый привод (VFD).
ЧРП выполняет две функции: во-первых, он преобразует входящий сигнал переменного тока в сигнал постоянного тока путем выпрямления; во-вторых, он инвертирует выпрямленный сигнал постоянного тока обратно в сигнал переменного тока переменной частоты.
Скорость двигателя постоянного тока может изменяться за счет увеличения или уменьшения приложенного напряжения. Это не относится к двигателю переменного тока. Асинхронный двигатель переменного тока выйдет из строя, если входное напряжение питания значительно изменится.
Контроллер скорости двигателя переменного тока
Контроллер переменного тока, контролирующий скорость двигателя переменного тока, также называется частотно-регулируемым приводом (VFD), преобразователем частоты (ASD) и преобразователем частоты (FC). Двигатель переменного тока получает питание с переменной частотой, генерируемой контроллером переменного тока. Этот регулируемый выход позволяет точно контролировать скорость двигателя.
Компоненты регулятора скорости переменного тока
Регулятор скорости переменного тока состоит из трех основных компонентов:
- Выпрямитель
- Инвертор
- Звено постоянного тока
Входной переменный ток преобразуется в постоянный с помощью выпрямителя.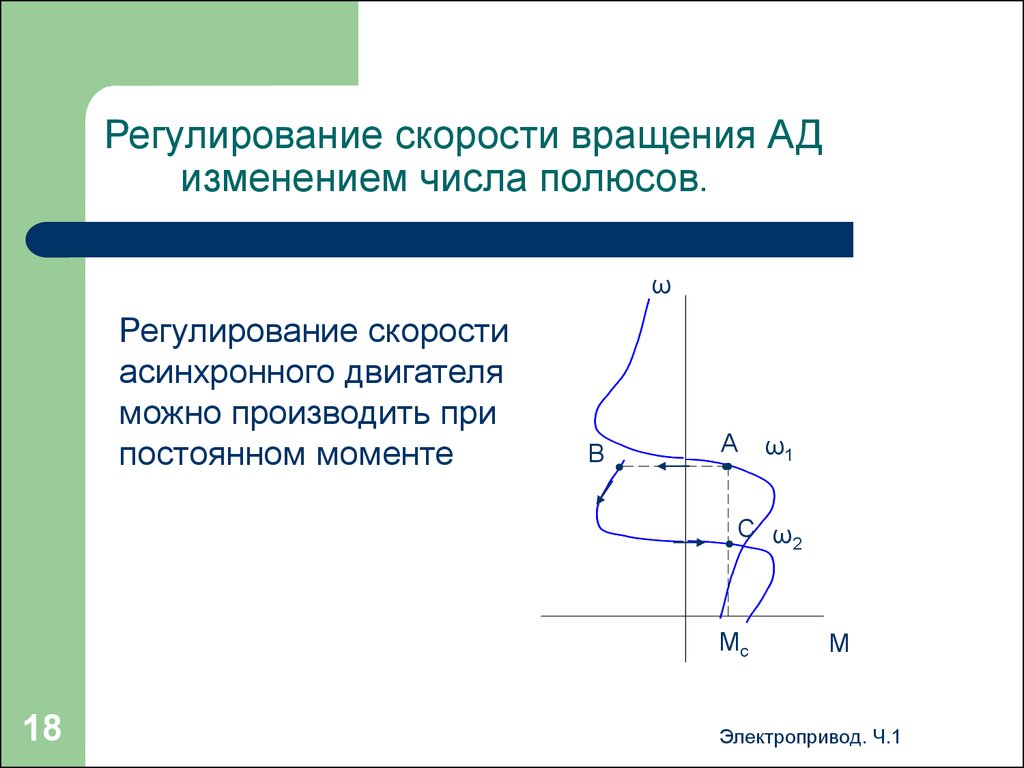 Инвертор преобразует постоянное напряжение обратно в переменное на выходе с желаемой частотой.
Инвертор преобразует постоянное напряжение обратно в переменное на выходе с желаемой частотой.
Типы частотно-регулируемых приводов
Преобразователи частоты (ЧРП) бывают трех основных типов:
- Инвертор источника тока (CSI)
- Инвертор источника напряжения (VSI)
- Широтно-импульсная модуляция (ШИМ).
Секции частотно-регулируемого привода включают преобразователь, промежуточный контур и инвертор.
Инвертор источника тока (CSI)
Инвертор источника тока (CSI) преобразует входящее напряжение переменного тока, а также регулирует частоту и напряжение, подаваемые на асинхронный двигатель переменного тока. CSI преобразует входящее переменное напряжение в переменное постоянное напряжение, используя:
- Кремниевые управляемые выпрямители (SCR)
- Тиристоры с коммутацией затвора (GCT)
- Симметричные тиристоры с затвором (SGCT)
Преобразователь напряжения (VSI)
Преобразование преобразователя напряжения (VSI) аналогично функции CSI – преобразование входящего переменного напряжения в постоянное. Разница в том, что VSI использует диодный мостовой выпрямитель для достижения преобразования. В мосте используются конденсаторы для поддержания постоянного напряжения постоянного тока, а также для хранения энергии для системы привода.
Разница в том, что VSI использует диодный мостовой выпрямитель для достижения преобразования. В мосте используются конденсаторы для поддержания постоянного напряжения постоянного тока, а также для хранения энергии для системы привода.
В секции инвертора используются транзисторы и тиристоры многих типов, которые действуют как переключатели для создания выходного сигнала широтно-импульсной модуляции (ШИМ) для управления частотой и напряжением, подаваемым на двигатель.
Широтно-импульсная модуляция (ШИМ)
В широтно-импульсной модуляции (ШИМ) используется диодный мостовой выпрямитель, подобный VSI, преобразующий входящее переменное напряжение в постоянное. Пульсации, генерируемые выпрямителем, сглаживаются большими конденсаторами в звене постоянного тока. Это обеспечивает стабильное напряжение на шине постоянного тока.
Биполярные транзисторы с изолированным затвором (БТИЗ) высокой мощности используются в каскаде многоступенчатого инвертора драйвера для включения и выключения для управления как частотой, так и напряжением, подаваемым на двигатель в виде синусоидального выходного сигнала.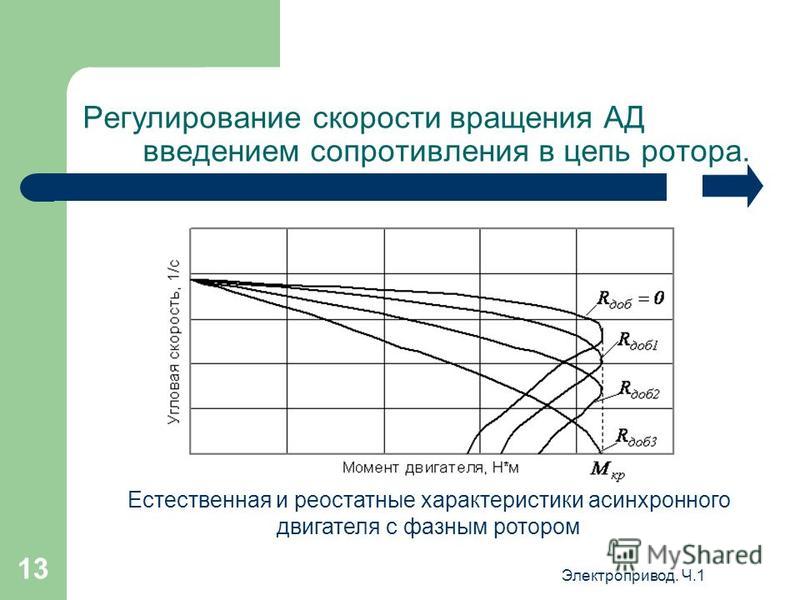 Изменение ширины импульса напряжения приводит к среднему напряжению мощности, которое подается на двигатель. Количество переходов формы сигнала в секунду определяет частоту, необходимую двигателю.
Изменение ширины импульса напряжения приводит к среднему напряжению мощности, которое подается на двигатель. Количество переходов формы сигнала в секунду определяет частоту, необходимую двигателю.
Регулирование скорости двигателей постоянного тока
Двигатели постоянного тока используются в приложениях с точным регулированием скорости из-за их способности довольно легко и эффективно обеспечивать вращение от положения останова до полной скорости. Управление скоростью последовательного двигателя постоянного тока, когда поле включено последовательно с якорем, осуществляется путем увеличения или уменьшения приложенного к цепи напряжения.
В шунтирующем двигателе постоянного тока, где поле параллельно якорю, скорость регулируется увеличением или уменьшением приложенного к якорю напряжения с помощью реостата.
Вместо реостатов теперь используются кремниевые управляемые выпрямители (SCR), поскольку они могут работать с большим количеством энергии без проблем с рассеиванием тепла. Кроме того, SCR намного меньше по размеру и легко взаимодействуют с программируемыми логическими контроллерами (ПЛК).
Кроме того, SCR намного меньше по размеру и легко взаимодействуют с программируемыми логическими контроллерами (ПЛК).
Управление потоком
Скоростью двигателя постоянного тока можно управлять, изменяя прилагаемый к нему поток, поскольку скорость двигателя обратно пропорциональна потоку на полюс. Для управления потоком последовательно с обмоткой возбуждения добавляют переменный резистор или реостат. Увеличение сопротивления увеличит скорость, так как уменьшит поток. В шунтовых двигателях ток возбуждения очень мал, поэтому этот метод работает достаточно эффективно. Управление потоком является простым и удобным методом управления скоростью, так как потери мощности невелики из-за малого тока шунтирующего поля.
Управление якорем
Скорость двигателя постоянного тока прямо пропорциональна противо-ЭДС. Это означает, что при постоянном напряжении питания и сопротивлении якоря скорость прямо пропорциональна току якоря. Таким образом, если добавить сопротивление последовательно с якорем, ток уменьшится, а значит, уменьшится и скорость. Чем больше сопротивление последовательно с якорем, тем больше падение скорости. В методе управления якорем теряется большое количество энергии, и это полезно для небольших двигателей.
Чем больше сопротивление последовательно с якорем, тем больше падение скорости. В методе управления якорем теряется большое количество энергии, и это полезно для небольших двигателей.
Управление напряжением
Управление несколькими напряжениями
На шунтирующую область подается фиксированное возбуждающее напряжение, но на якорь подаются переменные напряжения. Это напряжение на якоре контролируется соответствующим распределительным устройством, а скорость двигателя обычно пропорциональна напряжению на якоре.
Система Ward-Leonard
Система управления скоростью вращения двигателей постоянного тока Ward-Leonard используется там, где требуется очень точное управление скоростью двигателя. В этом методе выходной сигнал генератора подается на якорь двигателя, скорость которого необходимо контролировать. Выходное напряжение генератора можно изменять с помощью регулятора поля от нуля до максимального значения, тем самым плавно изменяя напряжение якоря, что приводит к очень плавному управлению скоростью двигателя постоянного тока.
Как контролировать скорость электродвигателя переменного тока
Двигатель переменного тока представляет собой электрический двигатель, приводимый в действие переменным током (AC), и состоит из двух основных частей: внешнего статора с катушками, на которые подается переменный ток для создания вращающегося магнитного поля. поле и внутренний ротор, прикрепленный к выходному валу, создающий второе вращающееся магнитное поле. Возможность управления скоростью двигателя имеет множество преимуществ, и в этом руководстве рассматриваются различные способы управления скоростью двигателя.
Как отмечалось выше, управление скоростью электродвигателя переменного тока имеет множество преимуществ, включая снижение звукового шума, энергоэффективность и улучшенный контроль над приложением двигателя. Несмотря на то, что они являются устройствами с постоянной скоростью, скорость двигателя переменного тока может изменяться при изменении частоты, входного напряжения или обмоток, которые заставляют двигатель вращаться.
Распространенным и эффективным способом изменения скорости двигателя является изменение частоты с помощью инвертора в качестве источника питания. Благодаря технологическим достижениям и снижению стоимости инверторов это часто используемый и популярный вариант. Методы, включающие снижение напряжения на обмотках двигателя с помощью трансформаторов, резисторов или отводов обмотки двигателя, также используются до сих пор.
Если вы планируете использовать инвертор для питания электродвигателя переменного тока, важно выбрать тот, который может обеспечивать не только напряжение и рабочий ток двигателя, но и пусковой ток. Используйте необходимый диапазон изменения скорости, чтобы выбрать диапазон частот, который должен обеспечивать инвертор. Элементы управления инвертора можно использовать для изменения частоты, подаваемой на двигатель, и скорость двигателя будет соответственно изменяться.
Если абсолютно точное управление скоростью не является критичным для применения двигателя, можно также добавить переменное сопротивление в цепь двигателя для снижения напряжения на основной обмотке. «Пробуксовка» двигателя — разница между синхронной скоростью магнитного поля электродвигателя и частотой вращения вала, обычно близкая к нулю, будет возрастать, так как на двигатель подается пониженная мощность. Кроме того, полюса двигателя не получают достаточной мощности для создания силы, необходимой для поддержания их нормальной скорости, и в этом методе двигатель должен быть рассчитан на высокое скольжение.
«Пробуксовка» двигателя — разница между синхронной скоростью магнитного поля электродвигателя и частотой вращения вала, обычно близкая к нулю, будет возрастать, так как на двигатель подается пониженная мощность. Кроме того, полюса двигателя не получают достаточной мощности для создания силы, необходимой для поддержания их нормальной скорости, и в этом методе двигатель должен быть рассчитан на высокое скольжение.
Более эффективным вариантом является использование трансформатора переменного напряжения. Этот метод изменяет напряжение, подаваемое на основную обмотку, что приводит к высокому скольжению и уменьшению скорости управления напряжением. Трансформатор переменного напряжения имеет малые потери по сравнению с переменным резистором. Использование трансформатора может иметь ряд ответвлений, которые изменяют отношение напряжения для управления скоростью двигателя. Эти отводы можно переключать вручную, или трансформатор может быть оснащен переключателем отводов с электроприводом. Несмотря на это, скорость двигателя изменяется с дискретными приращениями, а конкретная конструкция зависит от установки, в которой используется трансформатор.
Несмотря на это, скорость двигателя изменяется с дискретными приращениями, а конкретная конструкция зависит от установки, в которой используется трансформатор.
Другим методом управления скоростью двигателя переменного тока является использование двигателя переменного тока с обмотками с ответвлениями для изменения скорости. Этот метод чаще всего используется в домашних вентиляторах с переключателями высокой, средней и низкой скорости . Эти двигатели имеют заданное количество отводов на основной обмотке, что позволяет им работать с различными напряжениями, приложенными к его магнитному полю. Количество отводов и скоростей, доступных для двигателя, обычно не превышает четырех. Точная скорость в таких типах приложений не критична, а управление скоростью с помощью этой опции очень экономично.
Преобразователь частоты (VFD) — еще один вариант, представляющий собой контроллер двигателя переменного тока, который управляет двигателем, изменяя подаваемые на него частоту и напряжение. Частота (или герц) напрямую связана со скоростью двигателя (об/мин), поэтому чем выше частота, тем выше скорость вращения. Если приложение двигателя не требует, чтобы он работал на полной скорости, можно использовать частотно-регулируемый привод для снижения частоты и напряжения в соответствии с требованиями нагрузки двигателя. Когда требования к скорости двигателя приложения изменяются, частотно-регулируемый привод эффективно снижает или увеличивает скорость двигателя в соответствии с требованиями к скорости. Использование частотно-регулируемого привода может обеспечить снижение энергопотребления и затрат, увеличение производительности за счет более строгого контроля процесса и продление срока службы оборудования при одновременном снижении требований к техническому обслуживанию.
Частота (или герц) напрямую связана со скоростью двигателя (об/мин), поэтому чем выше частота, тем выше скорость вращения. Если приложение двигателя не требует, чтобы он работал на полной скорости, можно использовать частотно-регулируемый привод для снижения частоты и напряжения в соответствии с требованиями нагрузки двигателя. Когда требования к скорости двигателя приложения изменяются, частотно-регулируемый привод эффективно снижает или увеличивает скорость двигателя в соответствии с требованиями к скорости. Использование частотно-регулируемого привода может обеспечить снижение энергопотребления и затрат, увеличение производительности за счет более строгого контроля процесса и продление срока службы оборудования при одновременном снижении требований к техническому обслуживанию.
Наконец, регулирование величины напряжения на клеммах двигателя с помощью широтно-импульсной модуляции (ШИМ) также может управлять скоростью двигателя. Как следует из этого термина, ШИМ-управление скоростью работает, управляя двигателем с помощью быстрых серий импульсов «ВКЛ» и «ВЫКЛ» и изменяя рабочий цикл. Мощность, подаваемая на двигатель, регулируется изменением ширины этих приложенных импульсов, что, в свою очередь, изменяет среднее напряжение, подаваемое на клеммы двигателя. Модулируя или изменяя синхронизацию этих импульсов, можно управлять скоростью двигателя. Таким образом, чем дольше импульс «ВКЛ», двигатель будет вращаться быстрее, и, наоборот, чем короче время «ВКЛ» импульса, тем медленнее будет вращаться двигатель.
Мощность, подаваемая на двигатель, регулируется изменением ширины этих приложенных импульсов, что, в свою очередь, изменяет среднее напряжение, подаваемое на клеммы двигателя. Модулируя или изменяя синхронизацию этих импульсов, можно управлять скоростью двигателя. Таким образом, чем дольше импульс «ВКЛ», двигатель будет вращаться быстрее, и, наоборот, чем короче время «ВКЛ» импульса, тем медленнее будет вращаться двигатель.
С помощью нескольких простых настроек или изменений можно управлять скоростью электродвигателя переменного тока. Посетите Zoro.com, чтобы узнать о широком ассортименте регуляторов скорости переменного тока от ведущих поставщиков.
Соответствие требованиям и пригодность продукта
Информация о продукте, содержащаяся в данном руководстве, предназначена только для общих информационных целей. Такие заявления о продукте не являются рекомендацией продукта или заявлением относительно уместности, точности, полноты, правильности или актуальности предоставленной информации.