Содержание
Регулирование скорости асинхронного двигателя
Асинхронный двигатель
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя.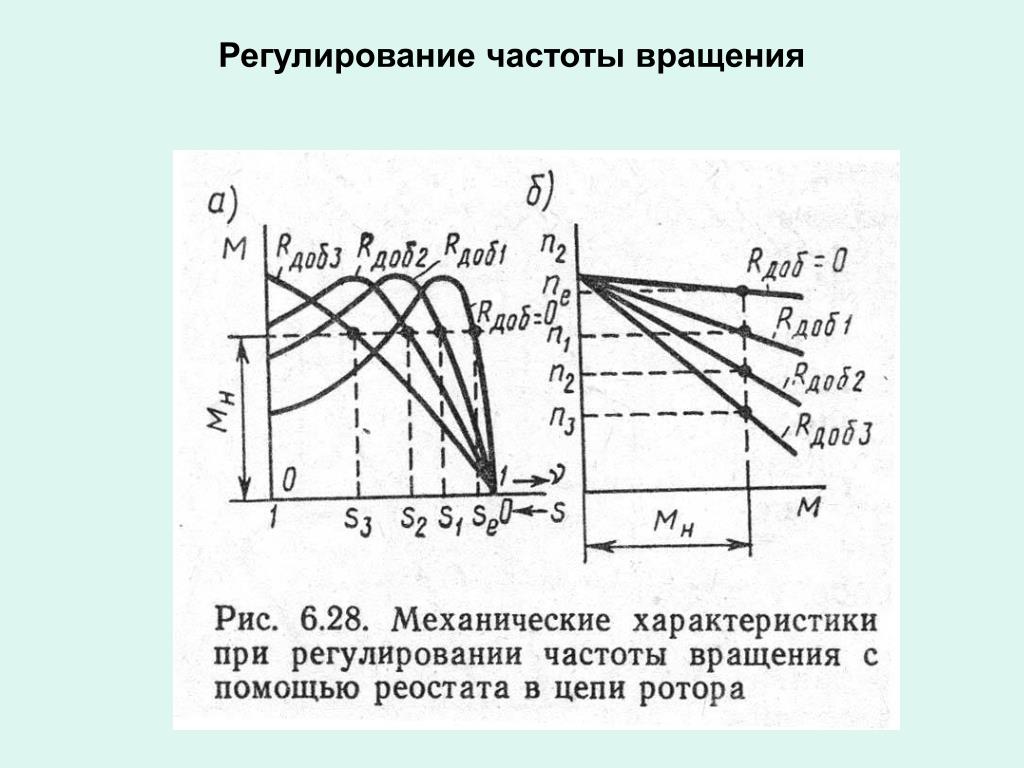 Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.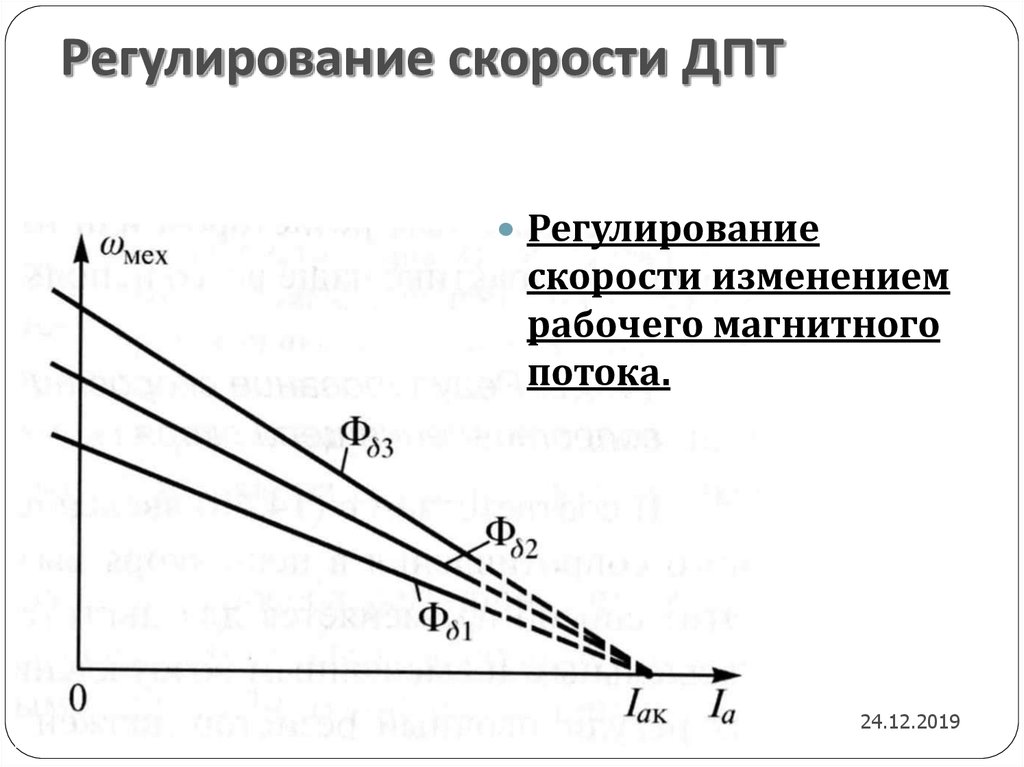
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также — Торможение асинхронного двигателя
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.

- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.

В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек).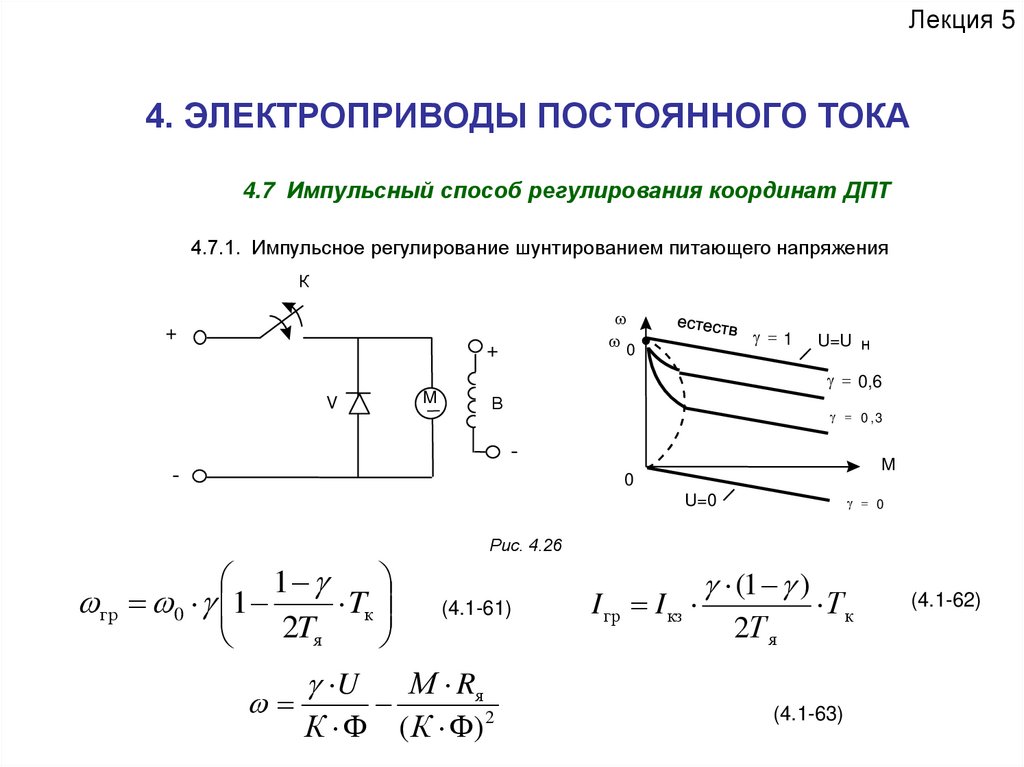 Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
← Отопление по — новому, или как правильно выбрать котел для автономного отопления
|
Торцевые уплотнения, причины выхода со строя в насосах →
Способы регулирования скорости асинхронного двигателя
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
- напряжения подаваемого на статор,
- вспомогательного сопротивления цепи ротора,
- числа пар полюсов,
- частоты рабочего тока.

Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 — частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 — коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
- укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
- применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2 : 1 = р2 : pt , 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2 : 1 = Рг : Pi , 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
• Скачать схемы обмоток многоскоростных асинхронных двигателей
• Скачать лекцию «Регулирование частоты вращения асинхронных двигателей»
Свежие записи:
Регулирование частоты вращения асинхронного двигателя
Общие сведения. Технологический процесс часто требует изменения частоты вращения исполнительного механизма. С этой целью широко применяются коробки скоростей, которые усложняют кинематику провода, вызывают вибрацию системы и увеличивают инерционность привода. Для повышения точности обработки и увеличения производительности целесообразно использовать регулировочные свойства двигателей. В асинхронных двигателях частота вращения определяется из равенства
где n1 = 60f 1 / р.
Из этого равенства следует, что изменять п можно тремя способами: изменением частоты f1 , числа пар полюсов р и скольжения s. Частоту вращения ротора в принципе можно регулировать изменением напряжения питания U1. Однако с увеличением U1 появляется опасность превышения допустимой температуры нагрева двигателя, а с уменьшением U1 уменьшается перегрузочная способность двигателя.
Регулирование изменением частоты (частотное регулирование). Этим способом изменение частоты вращения ротора п осуществляется за счет изменения частоты питающего напряжения f1. Это возможно потому, что скольжение в номинальном режиме составляет всего 2—8 %.
Это возможно потому, что скольжение в номинальном режиме составляет всего 2—8 %.
Для изменения частоты f1 могут применяться машинные и полупроводниковые (тиристорные) преобразователи. На рис. 3.36 показана схема машинного преобразователя. Асинхронный двигатеь АД с постоянной частотой вращает генератор постоянного тока Г, работающий в системе генератор — двигатель. Генератор Г питает двигатель Д постоянного тока, частота вращения которого регулируется током возбуждения генератора Г и двигателя Д.
Двигатель вращает с различными частотами синхронный генератор СГ, частота выходного напряжения которого f1 = n1p/60 изменяется. В результате АД изменяет частоту вращения рабочего механизма. Этот способ позволяет плавно изменять частоту вращения АД. Недостатками способа являются высокая стоимость преобразователя, низкий КПД установки из-за многократного преобразования энергии, сравнительно небольшой диапазон регулирования.
Частотное тиристорное регулирование. Значительно больший эффект при частотном регулировании достигается применением тиристорных преобразователей. На рис. 3.37 показана схема такого регулирования. Тиристорный преобразователь ТП питается от трехфазной сети с постоянными значениями напряжения U1 и частоты f1.
На выходе преобразователя получается постоянное варьируемое напряжение U1c. Это напряжение подается на блок инвертора И, на выходе которого появляется регулируемое переменное напряжение U1v при частоте f1v. Напряжение U1v подается на асинхронный двигатель АД.
Напряжение U1v подается на асинхронный двигатель АД.
Для автоматизации процесса регулирования необходимо дополнительно иметь блок задания частоты БЗЧ и блоки управления напряжением УН и частотой УЧ.
Для поддержания точного значения скорости целесообразно иметь обратную связь по частоте с выхода АД на блок задания частоты.
Регулирование изменением числа полюсов.
Асинхронный двигатель не имеет явно выраженных полюсов и поэтому его число полюсов зависит от схемы соединения катушек в обмотках каждой фазы статора.
Если, например, обмотка фазы состоит из двух катушек, то при их последовательном соединении число пар полюсов р = 2, а при параллельном соединении р = 1. Начала и концы катушек выводятся на клеммы щитка, так что переключение катушек можно делать на работающем двигателе. Можно разместить в пазах статора две независимые обмотки, каждая из которых создает разное число пар полюсов, например, р = 1 и р = 2.
Можно разместить в пазах статора две независимые обмотки, каждая из которых создает разное число пар полюсов, например, р = 1 и р = 2.
Одна из обмоток может, например, соединяться в одинарную звезду, а другая – в двойную звезду (рис. 3.38, а и б). Можно также переключать треугольник в двойную звезду (рис. 3.39, а и б).
В результате двигатель будет трехскоростной. В принципе можно разместить на статоре две обмотки, каждая из которых имеет две скорости, такая машина будет четырехскоростной. Однако размещение нескольких обмоток увеличивает габариты и стоимость машины. Поэтому лучше применять одну обмотку с переключением на четыре скорости. При этом можно получить синхронные скорости 3000 / 1500 / 1000 / 500 или 1500 / 1000 / 750 / 500 об/мин или другие комбинации.
Регулирование изменением числа полюсов является ступенчатым регулированием. Механические характеристики при разном числе пар полюсов показаны на рис. 3.40. Этот способ регулирования экономичен, рабочая часть характеристик жесткая, но данный способ применяется лишь в случаях, не требующих плавного регулирования, например в станках, где ступенчатое регулирование применяется с целью уменьшения числа ступеней в коробках скоростей, вентиляторах, насосах и др.
3.40. Этот способ регулирования экономичен, рабочая часть характеристик жесткая, но данный способ применяется лишь в случаях, не требующих плавного регулирования, например в станках, где ступенчатое регулирование применяется с целью уменьшения числа ступеней в коробках скоростей, вентиляторах, насосах и др.
Регулирование частоты вращения изменением подводимого напряжения. При уменьшении напряжения U момент двигателя уменьшается пропорционально U2. В связи с этим изменяются механические характеристики, уменьшается критический момент Mк , при постоянном моменте сопротивления увеличивается скольжение и уменьшается частота вращения ротора.
Уменьшать напряжение U можно включением в цепь статора реостатов (рис. 3.41, а), автотрансформаторов (рис. 3.41,6) или регулируемых дросселей (рис. 3.41, в). При включении реостатов в них теряется значительная мощность (RI2).
3.41, в). При включении реостатов в них теряется значительная мощность (RI2).
Автотрансформаторы дают возможность регулировать частоту вращения лишь вручную.
Регулируемые дроссели позволяют автоматизировать этот процесс, для чего их цепь
подмагничивания включается в систему автоматического регулирования.
Данный метод применяется только у двигателей малой мощности, так как при этом способе регулирования уменьшается КПД двигателя, уменьшается критический момент, а диапазон регулирования сравнительно небольшой.
Регулирование изменением сопротивления цепи ротора R2 (реостатное регулирование). Этот способ применим только для двигателей с фазным ротором. Такое регулирование связано с изменением скольжения s в соответствии с зависимостью п = п1 (1 — s).
Из формул ( 3.26) и ( 3.28) следует, что с увеличением R2 угол наклона механической характеристики увеличивается, а критический момент остается постоянным (Mк = const).
На рис. 3.42 представлено семейство характеристик п(М) при различных R2 . Если момент нагрузки Mc = const, то частота вращения n с увеличением R2 падает, а скольжение увеличивается.
Этот способ регулирования имеет ряд недостатков: дополнительные потери энергии в реостате, механические характеристики становятся мягкими, относительно малый диапазон регулирования.
Регулятор скорости вращения асинхронного электродвигателя
Пользователь интересуется товаром BM — Устройство для сбора и передачи данных по Wi-Fi. Пользователь интересуется товаром MP — Силовое реле расширения 5В, для управления электроприборами В мощностью до 2 кВт 10А. Пользователь интересуется товаром NN — Лабораторный блок питания 1,2…37В 0…3А набор для пайки. Приглашаем Вас в фирменные магазины в Москве Подробнее.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Асинхронная машина
- регулировка скорости электродвигатель
- Регулятор оборотов асинхронного электродвигателя 220в своими руками
- Регулятор частоты вращения двигателя
- Способы регулирования скоростью вращения асинхронного двигателя
- Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
- Способы регулировки оборотов вращения асинхронных двигателей
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Регулятор оборотов для асинхронного электродвигателя 220-380 вольт
 youtube.com/embed/NlgLRB_uw9E» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/NlgLRB_uw9E» frameborder=»0″ allowfullscreen=»»/>
Асинхронная машина
Наиболее распространённая конструкция таких двигателей содержит две или более обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность. Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем.
Также не затронем способ изменения количества полюсов обмоток. Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:. При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя. Данный способ имеет небольшой диапазон регулирования, примерно , а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности. Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой. Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1 , переключатель SW1 , на который приходят отводы с разным напряжением, и двигатель М1.
Преимущества данной схемы:. В данной схеме используются ключи — два тиристора, включённых встречно-параллельно напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения. Таким образом изменяется среднеквадратичное значение напряжения. Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов так называемые диммеры.
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе. Достоинства тиристорных регуляторов:. Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом. Изменение напряжения осуществляется по принципу ШИМ широтно-импульсная модуляция , а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором IGBT.
Выходные транзисторы коммутируются с высокой частотой около 50 кГц , если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность. Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения. Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:. Слабые стороны:. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей. Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули.
Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты. На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:.
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно. Преимущества специализированного частотного преобразователя:. Минусы использования однофазного ПЧ:. Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление. Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна. Недостатки метода:. Чем заменить сгоревший трансформатор или штатный импульсный источник? Предлагаемый модуль питания обеспечит стабильное напряжение питания.
Линейка холодильщика — удобный инструмент, заменяющий бумажные графики зависимости температуры от давления фреонов. Что же ещё удобней? Этот адрес электронной почты защищён от спам-ботов. У вас должен быть включен JavaScript для просмотра. Главная Справочные материалы Управление скоростью вращения однофазных двигателей. Управление скоростью вращения однофазных двигателей.
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения В. Регулировать скорость вращения таких двигателей необходимо, например, для: изменения расхода воздуха в системе вентиляции регулирования производительности насосов изменения скорости движущихся деталей, например в станках, конвеерах В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем.
На практике для этого применяют различные схемы регуляторов. Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.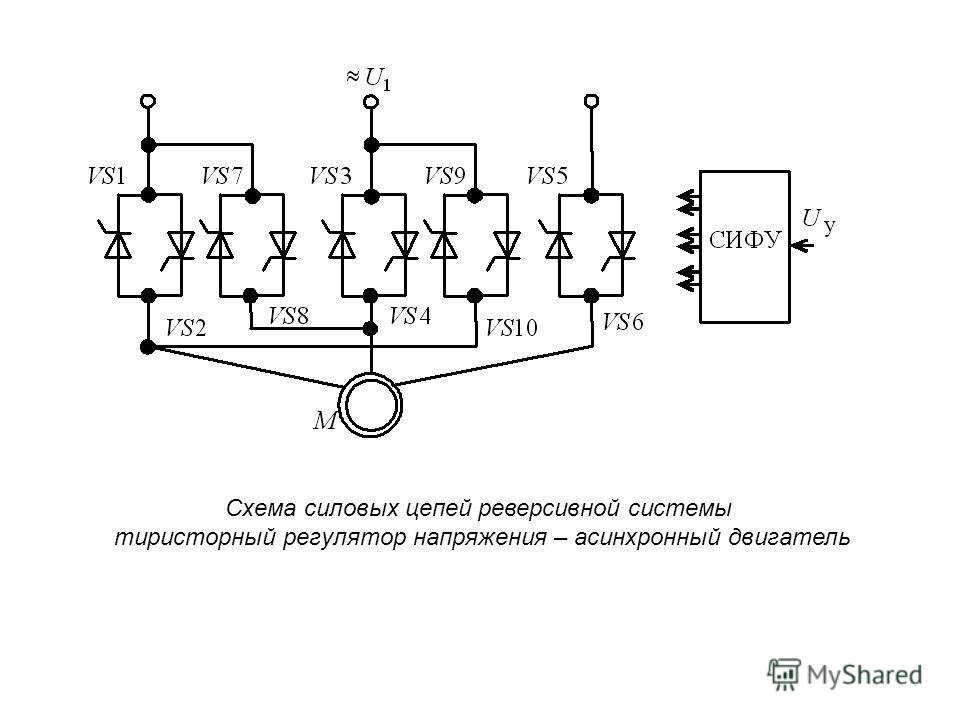 Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Самостоятельный ремонт кондиционеров. Чем заменить сгоревший трансформатор? Линейка холодильщика — современный вариант.
Как подобрать аналог варистора. Для подбора замены сгоревшему варистору необходимо воспользоваться таблицей аналогов. Климатические новости. Demir Dokum. General Climate.
Техническая документация Самостоятельный ремонт кондиционеров Самостоятельный монтаж кондиционеров Познавательные статьи Инверторные кондиционеры Техническая библиотека Справочные материалы Кондиционирование серверной Климатические новости История брендов Общестроительные статьи Магазин.
Контактная информация. Как подобрать аналог варистора Для подбора замены сгоревшему варистору необходимо воспользоваться таблицей аналогов.
регулировка скорости электродвигатель
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу. Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя , который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире. Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли из простейших ручных выключателей и магнитного реле, благодаря которым можно было только запустить мотор на максимальных оборотах или выполнить полное его отключение. Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора.
При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу. Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя , который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире. Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли из простейших ручных выключателей и магнитного реле, благодаря которым можно было только запустить мотор на максимальных оборотах или выполнить полное его отключение. Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора.
Итак, способ регулирования частоты вращения асинхронного двигателя что изменить скорость вращения электродвигателя можно лишь путем.
Регулятор оборотов асинхронного электродвигателя 220в своими руками
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем редукторы, шкивы , что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя. Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме. Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:.
Регулятор частоты вращения двигателя
Хорошая вентиляция воздуха в жилом помещении играет большую роль в жизни человека. Микроклимат прямо зависит от вентиляционной установки. Основной по популярности сегодня системой вентиляции является приточно-вытяжная. Множество новых установок вытяжки оснащены электрическим двигателем с возможностью регулировки оборотов электродвигателя.
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись. Именно этот электромотор можно регулировать по скорости вращения ротора, что и требуется в электроустановках.
Способы регулирования скоростью вращения асинхронного двигателя
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения. Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения инвертор. Он будет выполнять функцию источника питания. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
Он будет выполнять функцию источника питания. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
Забыли пароль? Изменен п. Расшифровка и пояснения — тут. Автор: viter50 , 1 ноября в Электроника. Может слышали о таком как «Транзисторы составные биполярные» именно к этому классу он относится, а значит и схема нарисована правильно, а с чтением схем у вас явное осложнение, не просто так там включёны диоды, там применён десятичный счетчик, 5 и 10 импульс не используется, это необходимо для исключения «сквозного тока». Рискну высказать свое субъективное мнение.
Различные виды регуляторов для изменения скорости вращения асинхронного двигателя. Частотный регулятор оборотов вращения.
Способы регулировки оборотов вращения асинхронных двигателей
Регулировка скорости изменением величины напряжения снижает момент и также увеличивает потери мощности. Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части. Асинхронный двигатель — самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин — постоянная скорость вращения вала.
Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части. Асинхронный двигатель — самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин — постоянная скорость вращения вала.
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу. Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя, который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире.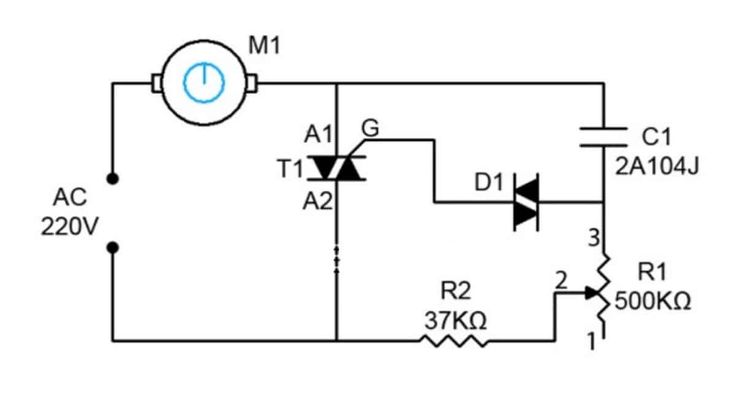
На современном этапе развития промышленности возникла необходимость для создания управления темпом вращения различными методами и устройствами.
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов. Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора. Из рис. Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до 2 — 3 : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению.
Появится избыточный результирующий вращающий момент, разгоняющий ротор до скорости. Регулятор скорости вращения асинхронного электродвигателя.. Регулирование частоты вращения двигателей определяется в.. Такие схемы применяются, например, у асинхронных двигателей.
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку
n = nо (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению.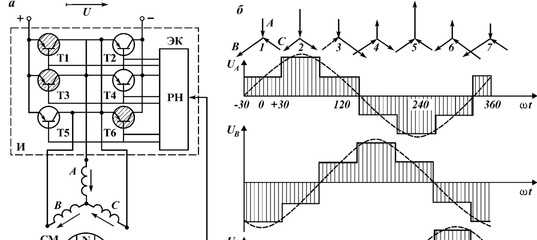 Такое регулирование возможно только для двигателя с фазным ротором.
Такое регулирование возможно только для двигателя с фазным ротором.
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
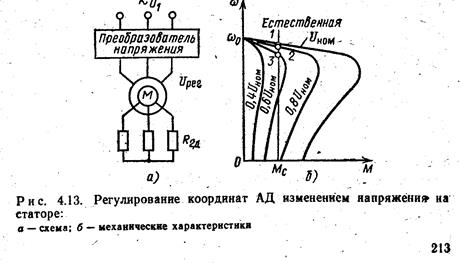
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения.
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения Uрет (рис. 3), а скольжение от Uрег не зависит.
Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора
Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре
Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до nкр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.
Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения – асинхронный двигатель (ТРН – АД)
Замкнутая схема управления асинхронным двигателем, выполненным по схеме тиристорный регулятор напряжения – электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора nо = 60f/р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость nо магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
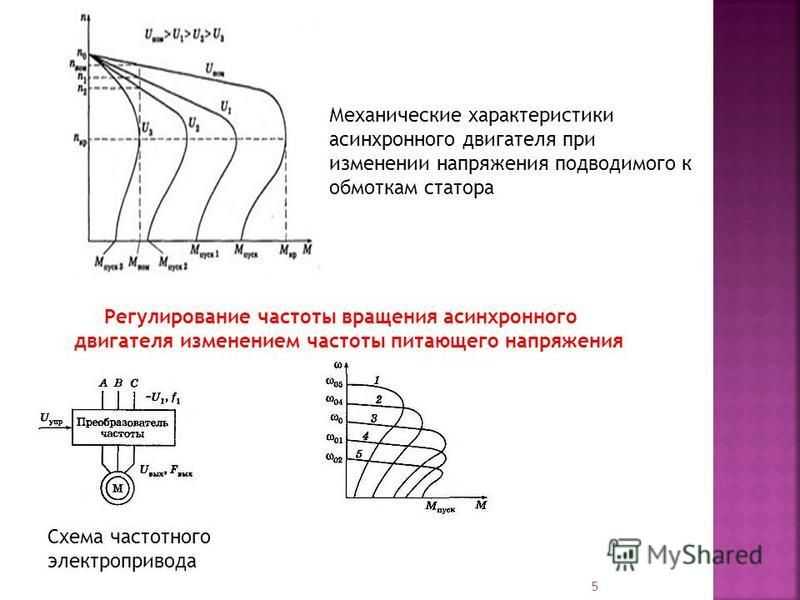
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании – на рис. 6.
Рис. 5. Схема частотного электропривода
Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
Большинство современных преобразователей частоты построено по схеме двойного преобразования.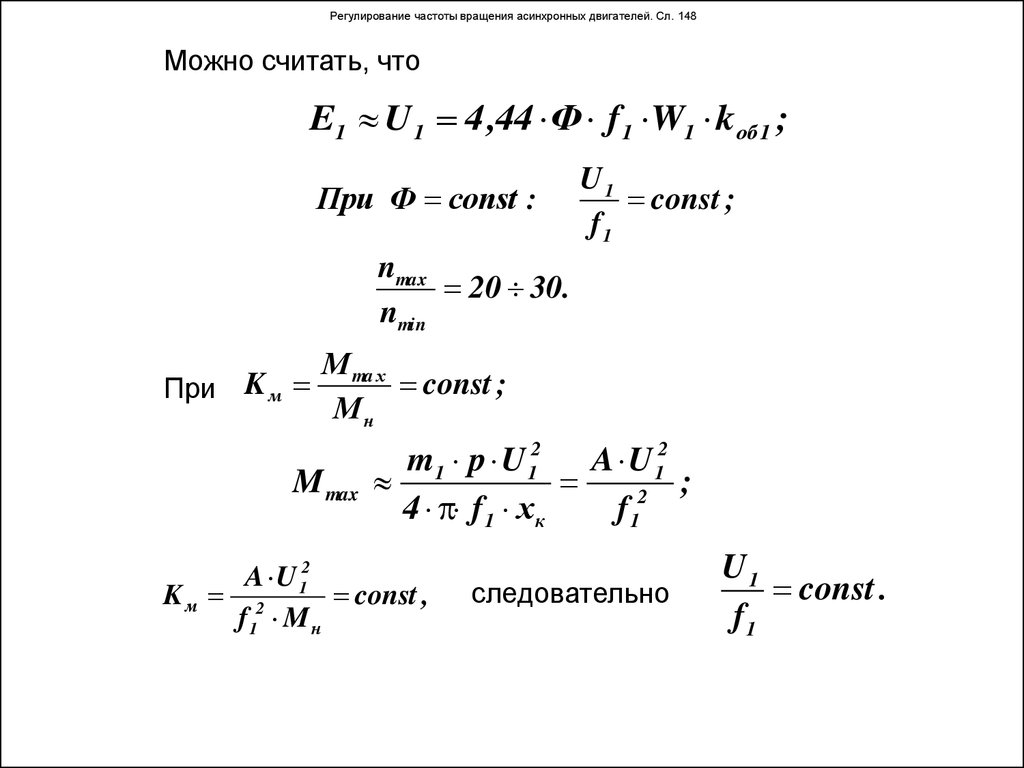 Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты Iвых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.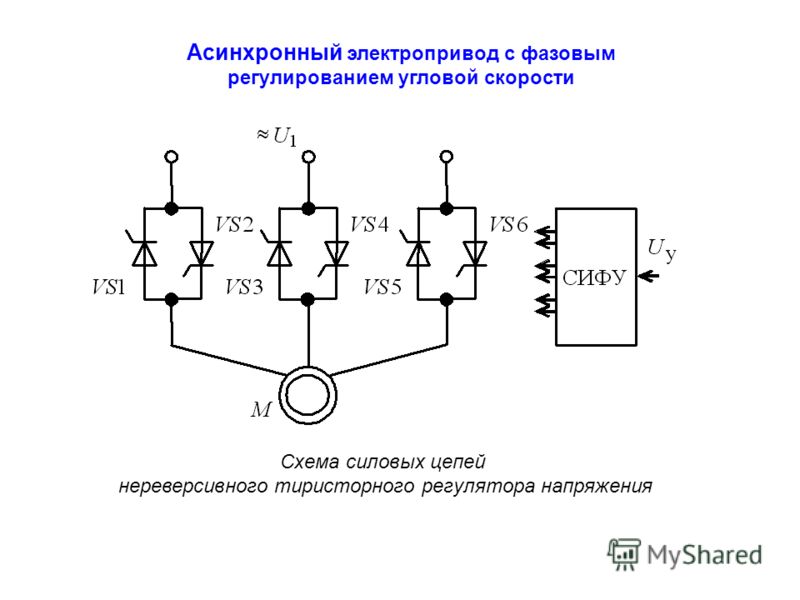
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения nо = 60f/р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения nо магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.
Рис. 7. Схемы переключения обмоток асинхронного двигателя: а – с одинарной звезды на двойную; б – с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
РЕГУЛИРОВАНИЕ СКОРОСТИ ДВИГАТЕЛЕЙ | Wattco
Существует множество приборов, которые являются частью нашей жизни, от бытовых электроприборов, таких как пылесосы и фены, до насосов, конвейерных лент и станков на крупных промышленных предприятиях. Везде, где в каких-либо машинах используются электродвигатели, некоторый тип управления скоростью двигателя неизменно является частью этой машины.
Регулятор скорости двигателей переменного тока
Асинхронный двигатель переменного тока по существу представляет собой устройство с постоянной скоростью. Скорость вращающегося магнитного поля называется синхронной скоростью. Синхронная скорость (S) двигателя определяется как S = 120(F) ÷ P, где (F) — частота входящей сети, а (P) — число полюсов в двигателе.
Поскольку в США частота сети переменного тока составляет 60 Гц при напряжении 120 В, поэтому асинхронный двигатель переменного тока с четырьмя полюсами будет иметь синхронную скорость 1800 об/мин. Однако в полевых условиях, когда к двигателю приложена нагрузка, он будет работать со скоростью менее 1800 об/мин. Эта разница в скорости называется скольжением и обычно выражается в процентах. Поскольку количество полюсов в машине фиксировано, единственная переменная, которую остается изменить, — это частота входящей линии — это основа работы регулятора скорости двигателя, известного как частотно-регулируемый привод (VFD).
ЧРП выполняет две функции: во-первых, он преобразует входящий сигнал переменного тока в сигнал постоянного тока путем выпрямления; во-вторых, он инвертирует выпрямленный сигнал постоянного тока обратно в сигнал переменного тока переменной частоты.
Скорость двигателя постоянного тока может изменяться за счет увеличения или уменьшения приложенного напряжения. Это не относится к двигателю переменного тока. Асинхронный двигатель переменного тока выйдет из строя, если входное напряжение питания значительно изменится.
Это не относится к двигателю переменного тока. Асинхронный двигатель переменного тока выйдет из строя, если входное напряжение питания значительно изменится.
Контроллер скорости двигателя переменного тока
Контроллер переменного тока, контролирующий скорость двигателя переменного тока, также называется частотно-регулируемым приводом (VFD), преобразователем частоты (ASD) и преобразователем частоты (FC). Двигатель переменного тока получает питание с переменной частотой, генерируемой контроллером переменного тока. Этот регулируемый выход позволяет точно контролировать скорость двигателя.
Компоненты регулятора скорости переменного тока
Регулятор скорости переменного тока состоит из трех основных компонентов:
- Выпрямитель
- Инвертор
- Звено постоянного тока
Входной переменный ток преобразуется в постоянный с помощью выпрямителя. Инвертор преобразует постоянное напряжение обратно в переменное на выходе с желаемой частотой.
Типы частотно-регулируемых приводов
Преобразователи частоты (ЧРП) бывают трех основных типов:
- Инвертор источника тока (CSI)
- Инвертор источника напряжения (VSI)
- Широтно-импульсная модуляция (ШИМ).
Секции частотно-регулируемого привода включают преобразователь, промежуточный контур и инвертор.
Инвертор источника тока (CSI)
Инвертор источника тока (CSI) преобразует входящее напряжение переменного тока, а также регулирует частоту и напряжение, подаваемые на асинхронный двигатель переменного тока. CSI преобразует входящее переменное напряжение в переменное постоянное напряжение, используя:
- Кремниевые управляемые выпрямители (SCR)
- Тиристоры с коммутацией затвора (GCT)
- Симметричные тиристоры с затвором (SGCT)
Инвертор источника напряжения (VSI)
Инвертор источника напряжения (VSI) Функция преобразования аналогична функции CSI – преобразование входного переменного напряжения в постоянное. Разница в том, что VSI использует диодный мостовой выпрямитель для достижения преобразования. В мосте используются конденсаторы для поддержания постоянного напряжения постоянного тока, а также для хранения энергии для системы привода.
Разница в том, что VSI использует диодный мостовой выпрямитель для достижения преобразования. В мосте используются конденсаторы для поддержания постоянного напряжения постоянного тока, а также для хранения энергии для системы привода.
В секции инвертора используются транзисторы и тиристоры многих типов, которые действуют как переключатели для создания выходного сигнала широтно-импульсной модуляции (ШИМ) для управления частотой и напряжением, подаваемым на двигатель.
Широтно-импульсная модуляция (ШИМ)
В широтно-импульсной модуляции (ШИМ) используется диодный мостовой выпрямитель, подобный VSI, преобразующий входящее переменное напряжение в постоянное. Пульсации, генерируемые выпрямителем, сглаживаются большими конденсаторами в звене постоянного тока. Это обеспечивает стабильное напряжение на шине постоянного тока.
Биполярные транзисторы с изолированным затвором (БТИЗ) высокой мощности используются в каскаде многоступенчатого инвертора драйвера для включения и выключения для управления как частотой, так и напряжением, подаваемым на двигатель в виде синусоидального выходного сигнала. Изменение ширины импульса напряжения приводит к среднему напряжению мощности, которое подается на двигатель. Количество переходов формы сигнала в секунду определяет частоту, необходимую двигателю.
Изменение ширины импульса напряжения приводит к среднему напряжению мощности, которое подается на двигатель. Количество переходов формы сигнала в секунду определяет частоту, необходимую двигателю.
Регулирование скорости двигателей постоянного тока
Двигатели постоянного тока используются в приложениях с точным регулированием скорости из-за их способности довольно легко и эффективно обеспечивать вращение от положения останова до полной скорости. Управление скоростью последовательного двигателя постоянного тока, когда поле включено последовательно с якорем, осуществляется путем увеличения или уменьшения приложенного к цепи напряжения.
В шунтирующем двигателе постоянного тока, где поле параллельно якорю, скорость регулируется увеличением или уменьшением приложенного к якорю напряжения с помощью реостата.
Вместо реостатов теперь используются кремниевые управляемые выпрямители (SCR), поскольку они могут работать с большим количеством энергии без проблем с рассеиванием тепла.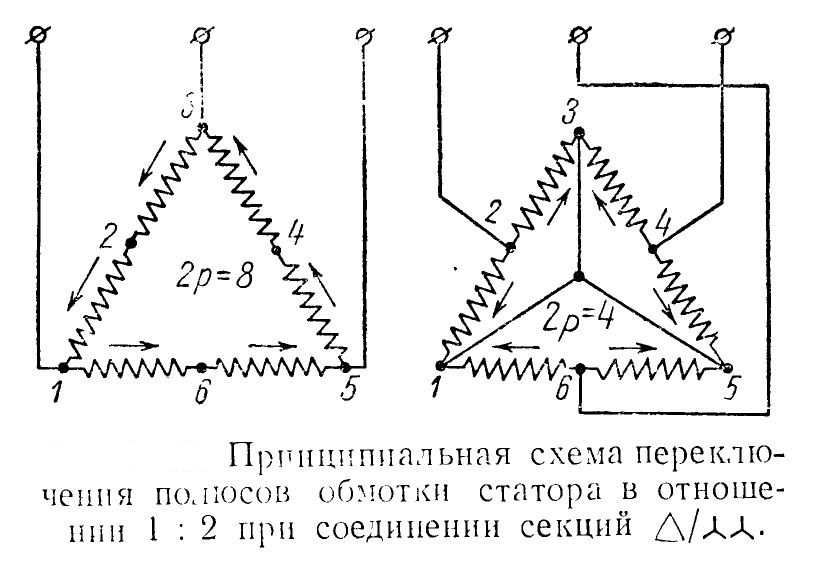 Кроме того, SCR намного меньше по размеру и легко взаимодействуют с программируемыми логическими контроллерами (ПЛК).
Кроме того, SCR намного меньше по размеру и легко взаимодействуют с программируемыми логическими контроллерами (ПЛК).
Управление потоком
Скоростью двигателя постоянного тока можно управлять, изменяя прилагаемый к нему поток, поскольку скорость двигателя обратно пропорциональна потоку на полюс. Для управления потоком последовательно с обмоткой возбуждения добавляют переменный резистор или реостат. Увеличение сопротивления увеличит скорость, так как уменьшит поток. В шунтовых двигателях ток возбуждения очень мал, поэтому этот метод работает достаточно эффективно. Управление потоком является простым и удобным методом управления скоростью, так как потери мощности невелики из-за малого тока шунтирующего поля.
Управление якорем
Скорость двигателя постоянного тока прямо пропорциональна противо-ЭДС. Это означает, что при постоянном напряжении питания и сопротивлении якоря скорость прямо пропорциональна току якоря. Таким образом, если добавить сопротивление последовательно с якорем, ток уменьшится, а значит, уменьшится и скорость. Чем больше сопротивление последовательно с якорем, тем больше падение скорости. В методе управления якорем теряется большое количество энергии, и это полезно для небольших двигателей.
Чем больше сопротивление последовательно с якорем, тем больше падение скорости. В методе управления якорем теряется большое количество энергии, и это полезно для небольших двигателей.
Управление напряжением
Управление несколькими напряжениями
На шунтирующее поле подается фиксированное возбуждающее напряжение, но на якорь подаются различные напряжения. Это напряжение на якоре контролируется соответствующим распределительным устройством, а скорость двигателя обычно пропорциональна напряжению на якоре.
Система Ward-Leonard
Система управления скоростью вращения двигателей постоянного тока Ward-Leonard используется там, где требуется очень точное управление скоростью двигателя. В этом методе выходной сигнал генератора подается на якорь двигателя, скорость которого необходимо контролировать. Выходное напряжение генератора можно изменять с помощью регулятора поля от нуля до максимального значения, тем самым плавно изменяя напряжение якоря, что приводит к очень плавному управлению скоростью двигателя постоянного тока.
Формула и методы [Примечания GATE]
Серия испытаний
Автор: Aina Parasher|Обновлено: 9 сентября 2022 г. Однако скорость асинхронного двигателя также может изменяться за счет изменения его синхронной скорости и скольжения. Для асинхронного двигателя с короткозамкнутым ротором скорость можно регулировать только через статор, но для асинхронного двигателя с контактными кольцами его скорость можно регулировать через статор, а также через его ротор.
Здесь мы подробно рассмотрим управление скоростью асинхронного двигателя и различные методы, которые можно использовать для управления скоростью.
Прочитать статью полностью
Что такое регулирование скорости асинхронного двигателя?
Регулятор скорости асинхронного двигателя регулирует токи асинхронного двигателя для регулирования скорости. Выражение для скорости (N) асинхронного двигателя:
N=N с (1−с)
Следовательно, мы можем управлять скоростью, изменяя ее синхронную скорость (N с ) или изменение его слипа(ов). Синхронная скорость асинхронного двигателя зависит от частоты питания и числа полюсов статора. Крутящий момент асинхронного двигателя во время работы определяется выражением
Синхронная скорость асинхронного двигателя зависит от частоты питания и числа полюсов статора. Крутящий момент асинхронного двигателя во время работы определяется выражением
T=[3×60/2πN с ]×sE 2 2 R 2 /R 2 2 ) 2
Следовательно, для данного крутящего момента и нагрузки мы можем изменять напряжение и сопротивление ротора, чтобы изменять скольжение и контролировать скорость асинхронного двигателя.
Методы управления скоростью асинхронного двигателя
Со стороны статора мы можем получить управление скоростью асинхронного двигателя, используя следующие методы, а именно:
- Метод управления напряжением
- Метод управления частотой
- Полюс Метод изменения
- Метод сопротивления статора
Со стороны ротора скорость асинхронного двигателя можно контролировать с помощью
- Метод управления сопротивлением ротора
- Метод рекуперации мощности с проскальзыванием
- Каскадное (или) тандемное соединение
Кратко обсудим эти методы управления скоростью асинхронного двигателя.
Метод управления напряжением
В этом методе управления скоростью асинхронного двигателя напряжение питания изменяется с помощью автотрансформатора. Практически мы не можем увеличить уровни напряжения сверх номинального напряжения, так как напряжение изоляции увеличится и приведет к повреждению изоляции.
T=[3×60/2πN s ]×sE 2 2 R 2 /R 2 2 +(sX 2 ) 2
During running, the slip крошечный; следовательно (sX 2 ) 2 можно пренебречь
⇒T 𝛼 sE 2 2
⇒T 𝛼 sV 2 2
Если напряжение снижается для данной нагрузки, скольжение будет увеличиваться при снижении скорости для поддержания постоянного крутящего момента нагрузки. Напряжение можно уменьшить до подходящего значения; двигатель станет нестабильным, если мы уменьшим напряжение ниже этого значения.
Метод управления частотой
Плотность магнитного потока сердечника статора обратно пропорциональна применяемой частоте. Чтобы уменьшить потери в сердечнике и улучшить работу двигателя, максимальная плотность потока (B m ) должна поддерживаться постоянной.
B m 𝛼 V/f
Таким образом, чтобы поддерживать максимальную плотность потока постоянной, мы должны изменять напряжение и частоту. Этот метод невозможен для частот выше номинальной частоты, поскольку необходимо также увеличить напряжение, что невозможно из-за ограничений по изоляции. Этот метод требует преобразователей переменного напряжения и переменной частоты, что делает этот метод дорогостоящим. Тем не менее, этот метод предлагает широкий диапазон регулирования скорости, не влияя на КПД двигателя.
Управление скоростью переключения полюсов
Этот метод управления скоростью асинхронного двигателя может применяться только к асинхронному двигателю с короткозамкнутым ротором. Поскольку количество полюсов в роторе асинхронного двигателя с контактными кольцами фиксировано, тогда как ротор с короткозамкнутым ротором может быть адаптирован к любому количеству полюсов. Полюса асинхронного двигателя можно менять двумя способами
Поскольку количество полюсов в роторе асинхронного двигателя с контактными кольцами фиксировано, тогда как ротор с короткозамкнутым ротором может быть адаптирован к любому количеству полюсов. Полюса асинхронного двигателя можно менять двумя способами
- Несколько наборов обмоток
- Последовательная смена полюсов
В первом методе мы используем несколько наборов обмоток статора, предназначенных для разных наборов полюсов. Во время работы любой из них может быть подключен в соответствии с требованиями пользователя к скорости, а остальные наборы останутся открытыми. Мы знаем, что
N s =120f/P
По мере увеличения числа полюсов скорость будет уменьшаться. Этот метод может изменять скорость только ступенчато, и он требует больших затрат, поскольку включает несколько обмоток статора.
В методе последовательной смены полюсов мы можем получить другой набор полюсов, поменяв местами катушки. Этот метод может дать только два набора скоростей.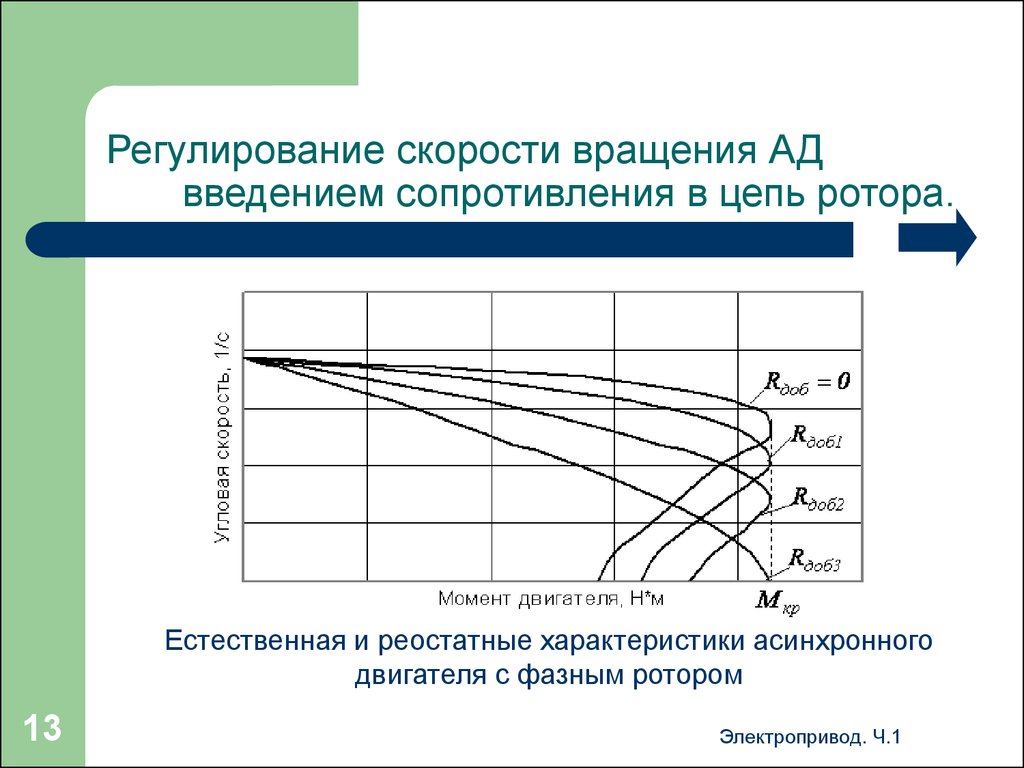
Метод сопротивления статора
Этот метод управления скоростью асинхронного двигателя аналогичен методу управления напряжением. Он требует последовательного включения трех реостатов с каждой фазой обмотки статора для снижения напряжения и достижения требуемой скорости. Поскольку из-за реостатов возникают некоторые потери мощности, этот метод будет предпочтительнее для машин с низким номиналом в течение небольшой продолжительности. Этот метод более выгоден при пуске, чем регулирование скорости.
Метод управления сопротивлением ротора
Этот метод управления скоростью возможен только для асинхронного двигателя с контактными кольцами, поскольку мы не можем получить доступ к ротору асинхронного двигателя с короткозамкнутым ротором. Этот метод подключает внешнее сопротивление к ротору через контактные кольца и щетки во время работы. Следовательно, это приводит к снижению крутящего момента.
T=[3×60/2πN s ]×sE 2 2 R 2 /R 2 2 +(sX
5 20116 ) 2
При заданном напряжении статора ЭДС, индуцируемая в роторе E 2 , постоянна, и во время работы скольжение незначительно; следовательно, (sX 2 ) 2 можно пренебречь.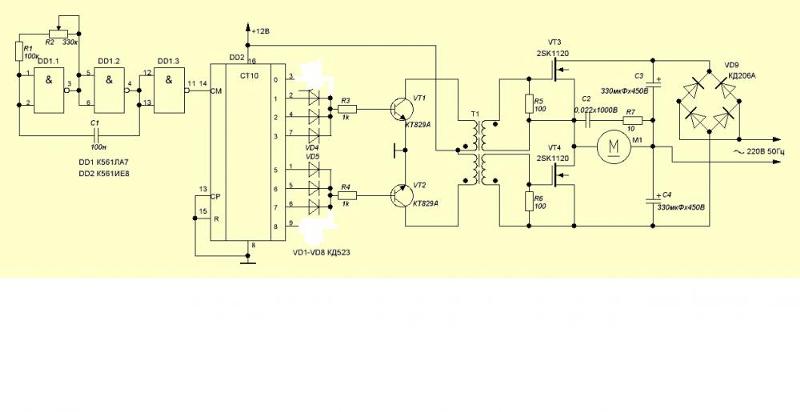
⇒T 𝛼 s/R 2
Но для поддержания постоянного момента нагрузки скорость ротора будет уменьшаться, а скольжение увеличиваться. Поскольку рабочее скольжение увеличивается, этот метод неэффективен и непригоден для широкого круга приложений.
Метод восстановления мощности скольжения
В этом методе управления скоростью асинхронного двигателя внешнее напряжение подается на ротор через контактные кольца и щетки с частотой скольжения (sf) для получения установившегося крутящего момента. Это можно сделать двумя способами.
В первом способе мы увеличиваем напряжение ротора, что приводит к увеличению скорости при заданной нагрузке. Мы знаем, что
T 𝛼 sE 2 2
Если напряжение ротора увеличить, крутящий момент увеличится; впоследствии скорость вращения ротора увеличится, а скольжение уменьшится.
Во втором способе уменьшаем напряжение в роторе, тогда момент уменьшится, скорость увеличится, а скольжение уменьшится. Привод Шербиуса является лучшим примером такого рода операций.
Привод Шербиуса является лучшим примером такого рода операций.
Каскадное или тандемное соединение
В этом методе управления скоростью асинхронного двигателя нам нужны два асинхронных двигателя, один из которых представляет собой асинхронный двигатель с контактными кольцами, а другой представляет собой асинхронный двигатель с контактными кольцами или короткозамкнутый ротор. Индукционный двигатель. Обе машины будут механически соединены; первый двигатель представляет собой асинхронный двигатель с контактными кольцами, который питает второй двигатель через контактные кольца.
Скорость индукционного двигателя скольжения составляет
N S1 = 120 F/P 1
Скорость второго двигателя составляет
N S2 = 120S 1 F/F/ P 2
В этом методе возможны четыре разные скорости. Они
- 120 F/P 1 +P 2 в кумулятивном каскаде
- 120 F/P 1 -P 2 в дифференциальном каскаде
- 120 F/P 1 9 9 9116. 0116 (только при работе двигателя 1)
- 120 f/P 2 (только при работе двигателя 2)
 0116 (только при работе двигателя 1)
0116 (только при работе двигателя 1)При дифференциальном каскадировании число полюсов обоих двигателей не должно быть одинаковым.
Часто задаваемые вопросы по управлению скоростью асинхронного двигателя
Какие существуют методы управления скоростью асинхронного двигателя?
Со стороны статора мы можем контролировать скорость, используя метод управления напряжением, метод управления сопротивлением, метод управления частотой и метод переключения полюсов. Со стороны ротора мы можем управлять скоростью, используя метод сопротивления ротора, метод рекуперации мощности скольжения и каскадное соединение.
Какими методами можно регулировать скорость асинхронного двигателя с короткозамкнутым ротором?
В асинхронном двигателе с короткозамкнутым ротором невозможно получить доступ к ротору, поэтому возможно только управление скоростью на основе статора, т.
е. метод управления напряжением, метод контроля сопротивления, метод контроля частоты и метод переключения полюсов.Что такое метод переключения полюсов для управления скоростью в асинхронном двигателе?
Этот метод управления скоростью возможен двумя способами. Первый заключается в использовании нескольких наборов обмоток статора, в которых статор рассчитан на несколько наборов полюсов, поэтому мы можем соединить обмотку с набором полюсов, который соответствует нашим требованиям. Второй — последовательное изменение полюсов путем реверсирования катушек, поэтому мы можем получить еще одну другую скорость.
Что такое метод рекуперации мощности скольжения для регулирования скорости асинхронного двигателя?
В этом методе внешнее напряжение подается на ротор через контактные кольца и щетки с частотой скольжения (sf). Это можно сделать двумя способами. В первом способе мы увеличиваем напряжение ротора, что приводит к увеличению скорости при заданной нагрузке.
Если напряжение ротора увеличивается, то крутящий момент будет увеличиваться, следовательно, скорость вращения ротора будет увеличиваться, а скольжение будет уменьшаться. Во втором способе мы уменьшаем напряжение в роторе, тогда уменьшится крутящий момент и, соответственно, увеличится скорость, а скольжение уменьшится. Привод Шербиуса является лучшим примером такого рода операций.Почему метод управления скоростью с переключением полюсов невозможен для асинхронного двигателя с контактными кольцами?
В отличие от ротора с короткозамкнутым ротором ротор с контактными кольцами не может адаптироваться к смене полюсов в обмотке статора, так как при проектировании асинхронного двигателя с контактными кольцами полюса ротора проектируются такими же, как и у статора. 100019
Следите за обновлениями
Наши приложения
- BYJU’S Exam Prep: приложение для подготовки к экзамену
GradeStack Learning Pvt.
Ltd.Windsor IT Park, Башня — A, 2-й этаж,Сектор 125, Нойда,
Уттар-Прадеш 201303
Как контролировать скорость асинхронных двигателей?
РЕКЛАМА:
Проблема регулирования скорости электродвигателей вообще и асинхронных двигателей в частности имеет большое практическое значение.
В ряде отраслей электродвигатели должны удовлетворять очень жестким требованиям к скоростным характеристикам, как по диапазону и плавности регулирования, так и по экономичности. С точки зрения характеристик регулирования скорости асинхронные двигатели уступают двигателям постоянного тока. Скорость шунтового двигателя постоянного тока можно регулировать в широком диапазоне с хорошей эффективностью и регулированием скорости, но скорость асинхронных двигателей нельзя изменять без потери эффективности и хорошего регулирования скорости.
Скорость асинхронного двигателя определяется выражением N = 120f/P(1 – s).
Таким образом, есть три фактора, а именно частота питания f, число полюсов P и скольжение s, от которых зависит скорость асинхронного двигателя. Следовательно, чтобы изменить скорость асинхронного двигателя, необходимо изменить хотя бы один из трех вышеуказанных факторов.РЕКЛАМА:
Способы регулирования скорости различаются по основному действию на двигатель:
(i) со стороны статора и
(ii) Со стороны ротора.
Различные способы управления скоростью со стороны статора:
РЕКЛАМА:
(a) Изменение частоты питания
(b) Изменение приложенного напряжения и
(c) Путем изменения количества полюсов.
Со стороны ротора можно регулировать скорость:
РЕКЛАМА:
(а) Путем изменения сопротивления в цепи ротора и
(b) Путем введения в цепь ротора дополнительной ЭДС той же частоты, что и основная ЭДС ротора.
Для последнего способа регулирования скорости асинхронных двигателей требуется дополнительная электрическая машина или несколько таких машин.
Комплект, состоящий из регулируемого асинхронного двигателя и одной или нескольких дополнительных электрических машин, соединенных с ним электрически или механически, называется каскадом. Коллекторные машины обычно используются в качестве дополнительных машин.1. Регулирование скорости путем изменения частоты питания:
Этот метод управления скоростью обеспечивает широкий диапазон регулирования скорости с постепенным изменением скорости во всем этом диапазоне. Основная трудность этого метода заключается в том, как получить питание переменной частоты. Вспомогательное оборудование, необходимое для этой цели, приводит к высоким первоначальным затратам, увеличению объема технического обслуживания и снижению общей эффективности. Вот почему этот метод не используется для приложений управления скоростью общего назначения. Несмотря на то, что эта схема сложна, существуют определенные приложения, в которых ее широкий, бесступенчато регулируемый диапазон скоростей и хорошая регулировка скорости делают ее использование весьма желательным.
РЕКЛАМА:
Если асинхронный двигатель должен работать на различных частотах с практически постоянными значениями КПД, коэффициента мощности, перегрузочной способности и постоянным абсолютным скольжением, то при ненасыщенном железе необходимо, чтобы напряжение питания изменялось пропорционально питающему частота.
Такое отклонение может произойти, например, если генератор питания подвергается колебаниям скорости либо из-за мгновенных перегрузок, либо из-за заметного регулирования скорости. И выходное напряжение, и частота изменяются в зависимости от скорости, если не предусмотрена автоматическая коррекция. На некоторых крупных судовых приводах гребные двигатели асинхронного типа, и их скорость регулируется от такого местного источника питания, который обеспечивается синхронными генераторами, соединенными с турбинами с регулируемой скоростью. Даже в таких случаях диапазон изменения скорости ограничен, потому что КПД первичных двигателей быстро падает с изменением скорости по сравнению с той, на которую они рассчитаны.
2. Регулирование скорости путем изменения напряжения питания:
Это метод контроля скольжения с переменным напряжением питания с постоянной частотой. В этом методе управления скоростью асинхронных двигателей напряжение, подаваемое на статор, изменяется для изменения скорости.
Этот метод управления скоростью прост, имеет низкие первоначальные затраты и низкие затраты на техническое обслуживание, но имеет ограниченное применение, потому что:
РЕКЛАМА:
(i) Работа при напряжениях, превышающих номинальное напряжение, ограничена магнитным насыщением,
(ii) Для относительно небольшого изменения скорости требуется большое изменение напряжения
(iii) Развиваемый крутящий момент значительно снижается при снижении напряжения питания, и двигатель остановится, если момент нагрузки превысит пусковой момент двигателя, соответствующий пониженному напряжению питания и,
(iv) Диапазон регулирования скорости очень ограничен в направлении вниз, т.
е. от номинальной скорости к более низким скоростям.Как правило, этот метод управления скоростью используется только при нагрузках, при которых требуемый крутящий момент значительно падает при снижении скорости, например, с небольшими двигателями с короткозамкнутым ротором, приводящими в движение вентиляторы.
Переменное напряжение может быть получено с помощью реакторов насыщения, вариаторов или трансформаторов с переключением ответвлений.
3. Регулировка скорости путем изменения количества полюсов:
Этот метод легко применим к двигателям с короткозамкнутым ротором, поскольку обмотка с короткозамкнутым ротором автоматически создает такое же количество полюсов, как и статор. Этот метод управления скоростью, как правило, неприменим для двигателей с фазным ротором, поскольку в таких машинах этот метод будет связан со значительными осложнениями конструкции и переключения, поскольку взаимосвязи как первичной, так и вторичной обмотки должны быть изменены одновременно, чтобы получить одинаковое количество полюсов в обеих обмотках.
В противном случае некоторые из токопроводящих ремней ротора будут создавать отрицательный крутящий момент.Количество пар полюсов в статоре можно изменить следующим образом:
(a) С использованием нескольких обмоток статора:
В этом методе управления скоростью две или более полностью независимых обмоток, каждая из которых имеет разное число полюсов, помещаются в одни и те же пазы статора. Число полюсов обмотки статора при этом никак не взаимосвязано и может быть выбрано произвольно в зависимости от условий работы данного двигателя. Например, двухскоростной двигатель может иметь две обмотки статора, одна обмотка для 4 полюсов, а другая для 6 полюсов, что обеспечивает синхронную скорость 1500 об/мин и 1000 об/мин при частоте питания 50 Гц. Иногда также используются двигатели с четырьмя независимыми обмотками статора, которые обеспечивают четыре различные синхронные (и, следовательно, рабочие) скорости. Конечно, используется только одна обмотка, а остальные полностью не работают.
Переключение с одной скорости на другую может осуществляться механическим переключателем или контакторами. При таком расположении обмотка или обмотки, которые используются или не используются, должны оставаться разомкнутыми с помощью переключателя или, по крайней мере, оставаться в звезде. В противном случае, из-за действия трансформатора, обмотка, подключенная к источнику питания, будет индуцировать напряжения в обмотке (обмотках) холостого хода и вызывать перегрев из-за последующих циркулирующих токов.
Само регулирование сводится к ступенчатому изменению скорости вращения двигателя по мере подключения той или иной обмотки статора к питающей сети. При каждом изменении двигатель оказывается в условиях, по существу аналогичных условиям пуска, т. е. при большом токе и пониженном моменте. Из-за неактивных проводников этот метод переключения полюсов требует большего статора, чем односкоростной двигатель того же номинала. Этот метод использовался для двигателей лифтов, тяговых двигателей, а также для небольших двигателей, приводящих в движение станки.
(b) Метод последовательных полюсов:
Метод переключения полюсов для управления скоростью трехфазного асинхронного двигателя, описанный выше в (а), т. е. метод с несколькими обмотками статора, используется только в небольших двигателях. В больших двигателях целесообразнее использовать метод последовательных полюсов, который устраняет необходимость иметь несколько обмоток статора для изменения числа полюсов статора. Этот метод управления скоростью использует всю обмотку для каждой скорости. Обычно для односкоростного двигателя последовательные группы катушек наматываются так, чтобы последовательно создавать полюса противоположной полярности. Это показано на рис. 1.83, где развита одна фаза четырехполюсной обмотки.
Следует отметить, что все катушки соединены последовательно, но концевые соединения выполнены с чередующимися группами, т. е. группа 1 с группой 3 и группа 4 с группой 2. Теперь концевые соединения групп с одинаковыми катушками , можно изменить так, чтобы последовательные катушки имели одинаковую полярность, как показано на рис.
1.84. Путем параллельного последовательного соединения групп 2-4 с группами 1-3 полярность групп 2 и 4 изменилась, так что теперь есть четыре последовательных северных полюса.Как следствие этого, между каждым из северных полюсов создаются южные полюса, и двигатель теперь имеет 8-полюсную обмотку. Таким образом, для питания с частотой 50 Гц последовательное расположение дает синхронную скорость 1500 об/мин, а последовательно-параллельное расположение дает синхронную скорость 750 об/мин. Также можно использовать последовательно-параллельную схему для 4-полюсной обмотки, а затем перейти к последовательной схеме для 8-полюсной обмотки. Схема переключения трехфазной обмотки с 2-х полюсной на 4-х полюсную показана на рис. 1.85.
При повторном соединении всех групп катушек с одинаковой полярностью статор действует так, как если бы он имел в два раза больше полюсов, чем группы полюсов. Созданные таким образом дополнительные полюса называются последовательными полюсами, а обмотка известна как обмотка последовательных полюсов.
Благодаря уникальной схеме переключения можно иметь стандартное (или обычное) соединение на одной стороне двухпозиционного переключателя и последующее полюсное соединение на другой стороне переключателя. Таким образом, можно получить две скорости: более высокую скорость при обычном соединении и половинную скорость при последовательном соединении полюсов.В двигателях, использующих метод последовательных полюсов для управления скоростью, наилучшая возможная конструкция обычно не может быть достигнута на обеих скоростях. То есть желаемые характеристики, такие как высокий коэффициент мощности, приносятся в жертву на одной скорости, чтобы получить достаточно хороший коэффициент мощности на другой скорости. Иногда соединения статора меняются с треугольника на звезду одновременно с изменением соединений полюсов. Это изменяет напряжение и делает возможным лучший двигатель на каждой скорости.
Двигатели двухскоростные обычно изготавливают с одной обмоткой на статоре, число полюсов изменяется в соотношении 1:2.
Трех- и четырехскоростные двигатели снабжены двумя обмотками на статорах, одна или обе из которых выполнены с переменным числом полюсов. Например, если желательно получить двигатель для четырех синхронных скоростей; 1500, 1000, 750 и 500 об/мин на статоре должны располагаться две обмотки, одна из которых дает 4 и 8 полюсов, а другая — 6 и 12 полюсов.Используя последовательно-параллельное соединение групп фаз отдельных фаз, фазы сами могут быть соединены по схеме звезда/треугольник, что приводит к двухскоростному режиму работы с тремя типами характеристик крутящий момент-скорость, а именно: постоянный крутящий момент, постоянная выходная мощность и переменная крутящий момент.
Из-за сложности конструкции и коммутации соединений обмоток статора невозможно получить более четырех скоростей для любого двигателя с помощью этого метода регулирования скорости. Этот метод также не обеспечивает постепенного регулирования скорости. Вот почему этот метод не используется для приложений управления скоростью общего назначения.
Однако этот метод очень удобен для приложений, таких как вентиляторы, конвейеры, станки или других приложений, которые требуют работы только на двух или четырех приблизительно постоянных скоростях, которые он обеспечивает. Преимущество этого метода заключается в простоте, хорошей регулировке скорости для каждой настройки, высокой эффективности и умеренных первоначальных затратах и обслуживании.Количество пар полюсов на статоре также можно изменить с помощью метода амплитудной модуляции полюсов — метода модуляции с подавлением несущей. Этот метод смены полюсов имеет то преимущество, что соотношение двух достижимых скоростей не обязательно должно быть 2:1, как в методе последовательного полюса.
4. Контроль импеданса статора:
Уменьшение напряжения на клеммах машины может быть достигнуто путем последовательного включения симметричных резисторов или катушек индуктивности с каждым выводом статора. В таких условиях напряжение на клеммах двигателя становится зависимым от тока двигателя, и напряжение изменяется с ускорением двигателя.
Характеристики крутящего момента для типичных скоростей показаны на рис. 1.86.Если полное сопротивление (R или X) отрегулировать таким образом, чтобы обеспечить одинаковый пусковой момент, характеристика скорость-момент в случае добавления индуктора будет иметь больший крутящий момент, чем при дополнительном сопротивлении. Кроме того, обе эти характеристики позволяют нам иметь крутящий момент больше, чем тот, который можно получить с характеристикой с уменьшенным приложенным напряжением, для того же пускового крутящего момента. Введение резистора в цепь статора улучшает коэффициент мощности, но за счет больших потерь энергии.
5. Управление скоростью путем изменения сопротивления ротора (или управление сопротивлением ротора):
Двигатели с фазным ротором обычно запускаются подключением пусковых сопротивлений во вторичной цепи, которые постепенно закорачиваются по мере увеличения скорости двигателя. Если омические значения этих сопротивлений выбраны правильно и если эти сопротивления рассчитаны на непрерывную работу, они могут служить двойному назначению, пуску и регулированию скорости.
Очевидно, что этот метод можно применять только к двигателям с фазным ротором.Плавность регулирования скорости зависит от количества доступных ступеней сопротивления. Управление осуществляется в направлении вниз от базовой скорости. Диапазон регулирования скорости непостоянен и зависит от величины нагрузки. Этот метод управления скоростью имеет характеристики, аналогичные характеристикам управления скоростью параллельного двигателя постоянного тока с помощью сопротивления, включенного последовательно с якорем. Его основными недостатками являются более низкий КПД и плохая регулировка скорости из-за увеличения сопротивления ротора при низкоскоростных настройках.
Например, при 50 % синхронной скорости КПД ротора составляет всего 50 %, а КПД двигателя будет несколько меньше. Изменение скорости ограничено диапазоном только 50-100%. Жидкостные реостаты предпочтительнее металлических реостатов, поскольку они не имеют индуктивности, а сопротивления можно плавно отключать, обеспечивая равномерный крутящий момент.
Введение внешних резисторов в цепь ротора асинхронного двигателя с контактными кольцами изменит характеристики скорости и момента.Этот метод управления скоростью как таковой не подходит для управления скоростью при постоянном крутящем моменте. Но этот метод широко используется для нагрузок, при которых требуемый крутящий момент значительно падает при снижении скорости, например, нагрузки вентилятора, для которых потребляемая мощность заметно падает при снижении скорости, что, в свою очередь, снижает потери в меди ротора. Кроме того, этот метод не применяется для непрерывного регулирования скорости, но предпочтителен для прерывистой (кратковременной) работы. Такой способ регулирования скорости широко применяется на практике для маломощных двигателей и мостовых кранов.
Однако иногда используется для регулирования скорости прокатных станов, особенно там, где они снабжены маховиками для снижения пиковых нагрузок в контуре. Здесь реостат, называемый регулятором скорости, автоматически включается при увеличении нагрузки, в результате чего скорость уменьшается и часть нагрузки компенсируется за счет кинетической энергии маховика.
И наоборот, при уменьшении нагрузки сопротивление цепи ротора уменьшается; скорость увеличивается и маховик начинает запасать кинетическую энергию.6. Вторичное внешнее управление напряжением:
В этом методе скорость асинхронного двигателя регулируется путем подачи во вторичную цепь напряжения с частотой скольжения. Если подаваемое напряжение находится в фазе с ЭДС индукции во вторичной цепи, это эквивалентно уменьшению сопротивления во вторичной цепи, следовательно, уменьшается скольжение или увеличивается скорость. Можно достичь сверхсинхронных скоростей путем подачи напряжения частоты скольжения в фазе с ЭДС индукции в цепи ротора.
Если подаваемое напряжение находится в противофазе по фазе с ЭДС индукции во вторичной цепи, это эквивалентно увеличению сопротивления во вторичной цепи, что приводит к увеличению скольжения или снижению скорости. Таким образом, этим методом возможен большой диапазон регулирования скорости за счет включения в цепь ротора преобразователя частоты.
В этом методе преодолеваются недостатки более низкого КПД и плохого регулирования скорости, но, поскольку для ввода во вторичную цепь ЭДС частоты скольжения требуется одна и обычно несколько вспомогательных машин, следовательно, он дороже и используется с двигателями очень больших рейтинг, например, для двигателей на сталелитейных заводах.
Было разработано несколько методов управления скоростью асинхронных двигателей путем подачи во вторичную цепь напряжения с частотой скольжения. Различные методы различаются по требованиям к вспомогательному оборудованию; от включения вспомогательного оборудования в конструкцию самого асинхронного двигателя до довольно сложной системы вспомогательных вращающихся машин и трансформаторов с регулируемым коэффициентом.
Основные критерии, которым должна соответствовать такая система:
(i) То, что переменное внешнее напряжение имеет частоту скольжения, т. е. частоту, равную s f и
(ii) Энергия, связанная с посторонним напряжением, подлежит восстановлению.
Наиболее распространенными системами, основанными на этом принципе, являются система Крамера, система Леблана и система Шербиуса регулирования скорости многофазных асинхронных двигателей.
7. Управление скоростью путем конкатенации:
В этом методе требуются два двигателя, по крайней мере один из которых должен иметь фазный ротор. Два двигателя могут быть механически соединены друг с другом для привода общей нагрузки. Если обмотка статора одного из них, двигателя с фазным ротором, подключена к трехфазной сети переменного тока, а его обмотка ротора подключена к обмотке статора второго двигателя, то скорость комбинации будет определяться суммой или разница количества полюсов в двух машинах. На практике принято соединять выход ротора первой машины со статором второй машины таким образом, чтобы вращающиеся поля обеих были в одном направлении; при этом условии результирующая скорость будет определяться следующим выражением:
Где f — частота сети, P 1 и P 2 — количество полюсов на машинах I и II соответственно.
Для получения скорости, превышающей нормальную, крутящий момент второго двигателя реверсируется путем простой замены двух проводов второго двигателя. Это называется дифференциальным каскадированием, и при этом условии скорость будет определяться выражением —
.
Дополнительное регулирование скорости, при желании, может быть получено путем использования второй машины также с фазным ротором и включения управляющего сопротивления в цепь ротора второй машины.
Если два двигателя имеют одинаковое количество полюсов и соединены в кумулятивный каскад [уравнение. (1.77)], они будут работать практически на половинной скорости. Поскольку крутящий момент на валу в дифференциальном каскаде значительно снижается, на практике он не используется.
Механическая мощность двух машин находится примерно в соотношении (1 – s 1 ): или
или Р 1 : Р 2 , т. е. в соотношении числа полюсов на машинах.
Главная ››
Регулирование скорости трехфазного асинхронного двигателя
Асинхронный двигатель широко используется в промышленности.
Скорость асинхронного двигателя можно регулировать различными способами. В этой статье мы обсудим различные методы управления скоростью трехфазного асинхронного двигателя.Скоростью асинхронного двигателя можно управлять со стороны статора и ротора. Ниже перечислены различные методы управления скоростью асинхронного двигателя.
Управление со стороны статора: Скоростью асинхронного двигателя можно управлять со стороны статора путем изменения;
- Приложенное напряжение
- Применяемая частота
- Количество полюсов статора
Управление со стороны ротора: Скоростью асинхронного двигателя можно управлять со стороны ротора путем изменения;
- Сопротивление ротора
- Каскадное соединение
- ЭДС инжекции в цепи ротора
- Система Шербиуса
Содержание
Регулирование скорости со стороны статора
Со стороны статора мы можем управлять асинхронным двигателем, изменяя различные величины.
Эти методы кратко описаны ниже.Управление скоростью путем изменения приложенного напряжения
Из уравнения крутящего момента асинхронного двигателя крутящий момент прямо пропорционален квадрату приложенного напряжения.
Скольжение при максимальном крутящем моменте не зависит от приложенного напряжения. А также изменение напряжения питания не меняет синхронную скорость.
На приведенном ниже рисунке показаны характеристики крутящий момент-скорость при изменении значений напряжения питания.
характеристика крутящий момент-скорость
Исходя из приведенных выше характеристик, скорость может изменяться на небольшое значение путем изменения большого значения напряжения для данной нагрузки.
Этот метод бесполезен по следующим перечисленным причинам;
Если напряжение изменяется больше, чем номинальное напряжение, это приведет к магнитному насыщению и может создать проблемы. В худшем состоянии сердечник двигателя будет поврежден.
При снижении напряжения питания развиваемый момент постепенно снижается.
Диапазон регулирования скорости очень ограничен от номинальной скорости до более низкого значения скорости.
Из приведенных выше причин можно сделать вывод, что управление скоростью изменением напряжения не популярно для больших двигателей. Но его можно использовать для очень маленьких двигателей.
Управление скоростью путем регулирования частоты
Уравнение синхронной скорости:
Изменяя частоту и количество полюсов, мы можем изменить синхронную скорость, и так далее, мы можем изменить скорость вращения ротора.
Но уравнение напряжения асинхронного двигателя;
Теперь, для постоянного напряжения, если мы изменим частоту, изменится и поток. Следовательно, чтобы иметь достаточную перегрузочную способность, двигатель должен поддерживать постоянный магнитный поток на всем протяжении регулирования скорости.
Поэтому для асинхронных двигателей недостаточно только частотного регулирования.
Поток останется прежним, если V/f останется постоянным. Таким образом, становится необходимым контролировать напряжение питания и частоту, чтобы соотношение было постоянным. Этот метод известен как V/f-метод управления скоростью.
V/f-метод управления скоростью
Этот метод представляет собой комбинацию двух вышеуказанных методов.
В этом методе нам необходимо контролировать напряжение и частоту при условии, что отношение V/f остается постоянным.
На приведенном ниже рисунке показана кривая крутящий момент-скорость для переменной частоты с постоянным соотношением V/f.
кривая крутящий момент-скорость для переменной частоты с постоянным соотношением V/f
Из приведенных выше характеристик видно, что максимальный крутящий момент почти не меняется при более высокой частоте.
Таким образом, в уравнении напряжения
Источник питания переменной частоты может быть получен с помощью вращающегося преобразователя частоты.
Генератор регулируемой частоты и инвертор звена постоянного тока.Управление скоростью путем изменения количества полюсов статора
При методе управления скоростью с помощью изменения полюсов соединения обмотки статора изменяются таким образом, что каждый тип комбинации дает разное количество полюсов.
Уравнение синхронной скорости;
Из приведенного выше уравнения можно изменить синхронную скорость, изменив количество полюсов.
Этот метод применим только к асинхронному двигателю с короткозамкнутым ротором, поскольку этот двигатель подходит для любого числа полюсов статора при условии, что число полюсов в статоре равно числу полюсов в роторе.
В случае асинхронного двигателя с контактными кольцами трехфазная обмотка намотана на определенное число полюсов. Когда обмотка намотана на ротор, количество полюсов изменить нельзя.
Управление скоростью путем изменения количества полюсов статора
Как показано на рисунке выше, количество полюсов уменьшается вдвое, и, следовательно, синхронная скорость удваивается.
Метод переключения полюсов используется для двигателей лифтов, тяговых двигателей и небольших двигателей, используемых в приводных станках.
Метод управления скоростью со стороны ротора
Со стороны ротора для управления скоростью используются четыре метода. Эти методы перечислены ниже.
- Путем изменения сопротивления ротора
- Каскадный способ подключения
- Путем подачи ЭДС в цепь ротора
- Система Шербиуса
Теперь мы кратко обсудим эти методы.
Путем изменения сопротивления ротора
Скорость асинхронного двигателя можно изменить, изменив сопротивление ротора. В асинхронном двигателе с короткозамкнутым ротором стержни ротора закорочены концевыми кольцами. Следовательно, мы не можем добавить дополнительное сопротивление обмоткой ротора.
Но в случае асинхронного двигателя с контактными кольцами мы можем добавить дополнительное сопротивление обмотке ротора.
Если сопротивление ротора увеличивается, скорость двигателя уменьшается.
Следовательно, скорость двигателя регулируется за счет управления сопротивлением ротора.Схема подключения метода сопротивления ротора
Схема подключения метода сопротивления ротора показана на рисунке выше.
Основным преимуществом этого метода является то, что дополнительное сопротивление приводит к потере мощности. И это приводит к снижению эффективности.
Другим недостатком этого метода является плохое регулирование скорости при изменении нагрузки. Таким образом, этот метод применим только к приложениям, где изменения скорости необходимы в течение короткого периода времени.
Моментно-скоростные характеристики для различных значений сопротивления ротора показаны на рисунке ниже.
Моментно-скоростные характеристики для различных значений сопротивления ротора
Преимущества:
- Может быть достигнута скорость ниже нормальной.
- Увеличивается пусковой момент из-за дополнительного сопротивления в цепи ротора.
Недостатки:
- Не подходит для двигателя с короткозамкнутым ротором.
- Большие изменения скорости невозможны.
- Потеря мощности из-за добавочного сопротивления I2R (снижается КПД).
- Дополнительное сопротивление требует масляного охлаждения.
- Скорость не может быть увеличена выше нормальной.
Каскадным соединением
При каскадном соединении два асинхронных двигателя соединяются на одном валу, как показано на рисунке ниже.
Метод каскадного соединения
Один двигатель (Мотор-А) является основным двигателем, а второй двигатель известен как вспомогательный двигатель (Мотор-В). Обмотка статора основного двигателя подключена к сети питания, а обмотка статора вспомогательного двигателя питается от ротора основного двигателя.
N sa = Синхронная скорость двигателя-A
Где, P a = Число полюсов двигателя-A
Следовательно, скольжение двигателя-A;
Частота ЭДС ротора;
ЭДС, создаваемая в роторе двигателя-A с частотой f’, подается на статор двигателя-B.
Следовательно, его частота будет такой же, как f’. Эта ЭДС снова создает вращающееся магнитное поле, благодаря которому в роторе двигателя-Б возникает ЭДС.
N sb = Синхронная скорость двигателя-B
Где, P b = Количество полюсов двигателя-B
Следовательно, скольжение двигателя-B;
Частота ЭДС ротора;
Для этого набора существует три возможных комбинации;
- Только двигатель-A подключен к источнику питания, и в этом случае N sa = 120f/P a
- Только двигатель-B подключен к источнику питания и в этом случае N сб = 120ф/п б
- Оба двигателя подключены каскадно.
В каскадном соединении есть два режима состояния; накопительный каскад и дифференциальный каскад.
В кумулятивном каскаде оба двигателя создают вращающееся поле в одном направлении. Следовательно, крутящий момент, создаваемый обоими двигателями, имеет одинаковое направление.
В дифференциальном каскаде направление вращающегося поля обоих двигателей противоположно. В этом случае последовательность фаз двигателя-В изменяется.
Синхронная скорость для накопительного каскада;
Синхронная скорость для дифференциального каскада;
Подачей ЭДС в цепь ротора
В этом методе ЭДС подается на частоте скольжения в цепь ротора с помощью внешнего источника. Таким образом, скорость двигателя регулируется путем управления ЭДС.
Если вводимая ЭДС противоположна ЭДС ротора, скорость уменьшается. И если введенная ЭДС имеет то же направление, что и ЭДС, индуцированная ротором, скорость увеличивается.
Этот метод состоит из двигателя постоянного тока и вращающегося преобразователя. Двигатель постоянного тока подключен к тому же валу, что и главный двигатель.
Вращающийся преобразователь используется для преобразования мощности переменного тока с низкой частотой скольжения в мощность постоянного тока.
И эта мощность постоянного тока используется для привода двигателя. Энергия постоянного тока подается от коммутатора роторного преобразователя к коммутатору двигателя постоянного тока через щетки.Скорость обоих двигателей регулируется реостатом переменного поля двигателя постоянного тока. Следовательно, когда сопротивление поля изменяется, постоянное напряжение двигателя и ротора соответственно изменяется. Следовательно, переменное напряжение ротора изменяется.
Здесь переменное и постоянное напряжение ротора имеют фиксированное соотношение. Этот метод управления скоростью имеет широкий диапазон и подходит для таких применений, как сталепрокатные заводы.
Схема этого метода показана на рисунке ниже.
Ввод ЭДС в цепь ротора
Система Шербиуса
Метод Шербиуса для управления скоростью асинхронного двигателя подходит для машин большой мощности. Принципиальная схема метода Шербиуса представлена на рисунке ниже.
Система Шербиуса
В этом методе управления скоростью главный асинхронный двигатель подключается к трехфазной сети.
Напряжение, развивающееся внутри его ротора, через его коммутатор подается на коммутационную машину. Это подаваемое напряжение находится на частоте скольжения.Коммутатор несет обычную трехфазную обмотку, на которую подается трехфазное напряжение с частотой скольжения и создается вращающееся магнитное поле.
Это поле перерезано обмоткой статора коммутационной машины, которая наводит в ней ЭДС.
Эта ЭДС вводится в цепь ротора главного асинхронного двигателя через регулирующий трансформатор. Величину инжектируемой ЭДС можно изменять, меняя отводы регулирующего трансформатора. И, следовательно, скорость двигателя можно контролировать.
211 всего просмотров, 3 просмотров сегодня
ТРЕХФАЗНОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ АИНХРОННОГО ДВИГАТЕЛЯ
Содержание
Обзор системы управления скоростью трехфазного асинхронного двигателя:
0002
Система управления скоростью трехфазного асинхронного двигателя — Техника управления скоростью, как правило, необходима в системе привода с регулируемой скоростью.
Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора напряжения. Метод управления скоростью, как правило, имеет важное значение в системе привода с регулируемой скоростью. Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора источника напряжения.Методы управления скоростью полезны для управления системой привода скорости. Системе требуется переменное напряжение и источник питания частоты, получаемый от инвертора трехфазного источника напряжения. В статье представлено регулирование скорости асинхронного двигателя, питаемого от трехфазного инвертора напряжения, с использованием метода широтно-импульсной модуляции и универсального моста. Здесь для управления пиковым напряжением звена постоянного тока инвертора источника напряжения был разработан ПИД-регулятор. Их результаты показывают, что регулятор скорости имеет хороший динамический отклик и может успешно управлять асинхронным двигателем с лучшими характеристиками.
Введение
Асинхронные двигатели широко используются в промышленных приводах из-за их простой недорогой конструкции двигателя и превосходной надежности. Управление двигателем затруднено из-за высокой сложности двигателя. Некоторые стратегии управления были представлены для управления двигателями. Техника включает ШИМ-управление скоростью. Управление имеет быстрое расширение с ростом силовой электроники. И они добиваются успеха в применении инверторных компонентов, что делает их все более популярными. ШИМ-управление, в частности, заслуживает сожаления как один из хорошо известных методов управления сложными системами асинхронных двигателей. Разработка подходящих алгоритмов управления асинхронными двигателями широко исследовалась более двух десятилетий. С самого начала ориентированного на поле управления приводами переменного тока, рассматриваемого как жизнеспособная замена традиционных приводов постоянного тока, несколько методов из теории линейного управления использовались в различных контурах управления схемы FOC, таких как пропорционально-интегральные (ПИ) регуляторы и их точная обратная связь.
линеаризация. Из-за этих линейных характеристик методы не гарантируют надлежащую работу машины во всем рабочем диапазоне и не учитывают изменения параметров установленной нагрузки двигателя. Методы основаны на комплексных стратегиях управления, отличающихся от продвинутых методов управления, описанных здесь. Метод осуществляется путем регулировки ширины импульса и коэффициента заполнения импульса для установки среднего напряжения. Технология PWM сопровождается развитием электронных силовых устройств, имеет хорошее развитие, и в настоящее время оно созрело. Используя метод ШИМ, форму выходного сигнала инвертора можно улучшить, чтобы свести к минимуму гармоники и пульсации выходного крутящего момента. Способ уменьшения конструкции инвертора для ускорения уровня регулировки и за счет увеличения динамического отклика системы. В области электродвижения двигатель очень важен для комплектации двигателя с регулируемой скоростью.Приводы асинхронного двигателя
Асинхронный двигатель имеет два типа обмоток: обмотки статора и обмотки ротора.
Обмотки рассчитаны на трехфазную индукционную систему. Асинхронный двигатель обычно работает в приводах с регулируемой скоростью. Трехфазное переменное напряжение питает обмотку статора со сбалансированным напряжением. Статор индуцировал ротор магнитным потоком в качестве принципала трансформатора. Значение оборотов и крутящий момент асинхронного двигателя можно установить с помощью- Контролируя напряжение статора.
- Контролируя напряжение ротора.
- Управление частотой.
- Путем управления напряжением и частотой статора.
- Путем контроля тока статора.
- Контролируя напряжение, ток и частоту.
Скорость вращения и крутящий момент, которые мы получаем, контролируя ток рабочего цикла, напряжение и частоту, очень важны. Этот метод может быть реализован с использованием метода широтно-импульсной модуляции с использованием универсального мостового компонента и ПИД-регулятора.
Инвертор / Трехфазный преобразователь постоянного тока в переменный
Трехфазный преобразователь постоянного тока в переменный (инвертор) с высокой мощностью широко используется в преобразователях частоты.
Основное правило трехфазного преобразователя постоянного тока в переменный состоит из 3 однофазных переключателей, которые подключены к одному из трех портов терминала нагрузки.Инвертор — это схема, которая используется для преобразования источника постоянного напряжения в источник переменного напряжения. Используемые силовые полупроводниковые компоненты могут быть в виде транзисторов SCR и полевых МОП-транзисторов, которые работают как переключатели и преобразователи. 3-фазный инвертор показан на рисунке ниже 9.0003
По способу преобразования инверторы можно разделить на 3 типа, а именно инверторы
- Серия
- Параллельный
- Мост
Мостовые инверторы делятся на полуволновые мостовые инверторы и полноволновые мосты. В результате выходное напряжение может быть в виде 1 фазы или 3 фаз.
Принцип работы трехфазного асинхронного двигателя:-
Принцип работы трехфазного асинхронного двигателя немного отличается от однофазного.
Статор содержит трехфазную обмотку, которая перемещается в пространстве на 120 градусов, когда трехфазное питание подается на обмотку статора, в статоре создается вращающийся магнитный поток (вращающийся с синхронной скоростью).Трехфазные статоры и роторы считаются двумя основными частями трехфазного асинхронного двигателя переменного тока. Когда фаза статора питается от трехфазного источника переменного тока, в статоре генерируется ток. Магнитное поле, создаваемое трехфазными токами статора, всегда безостановочно вращается при изменении тока. Это вращающееся магнитное поле разрезает ротор, и возникающий в нем ток взаимодействует с вращающимся магнитным полем. Таким образом создается магнитный момент, который заставляет ротор вращаться на рисунке. Значит, скорость вращения ротора должна быть меньше вращающегося магнитного поля n0. Обратное вращение ротора будет реализовано за счет сменного 3-х фазного ресурсного положения.
Это направление совпадает с фазным током, а значение скорости пропорционально частоте и обратно пропорционально числу полярных пар.
Расчетная минутная скорость вращающегося магнитного поля n0 может быть представлена следующим уравнением:no = синхронная скорость вращения в об/мин
f = частота источника питания в Гц
А p = число полюсов двигателя
Скорость вращения потока статора называется синхронной скоростью Зависит от числа полюсов двигателя частота двигателя и питания. Практическое поле по значению скорости ротора будет медленнее, чем синхронная скорость. Асинхронные двигатели также называют асинхронными двигателями, потому что значения скорости вращения ротора отличаются от потока статора. Скольжение – это разница между скоростью вращения ротора и вращательным потоком статора. Величина скольжения варьируется от 1% до примерно 6% скорости потока статора.
Значение скольжения,
Значение скорости вращения ротора,
𝑛 = 𝑛0 (1 − 𝑠) 𝑟𝑝𝑚
n0 = скорость вращения ротора 0 об/мин 0 поток потока в об/мин
3
с = значение скольжения в pu
Мощность переменного тока, подаваемая на двигатель через обмотки статора, и поток статора вращаются в том же направлении, что и источник питания.
ПИД-регулятор
Системы ПИД-регулирования наиболее широко используются в промышленности систем управления. Успех ПИД-регулятора зависит от его точности в определении ПИД-константы. Практически в процессе определения константы PID основаны на человеческом опыте, основанном на правилах, называемых эмпирическими правилами. Исходя из полученного результата, эта константа PID использовалась для дальнейшего контроля. Конечно, у него есть недостатки, потому что эта константа одинакова для каждого значения ошибки, и она требует сброса настройки, если есть изменения в параметрах объекта в константе ПИД. Чтобы преодолеть это, необходим метод, позволяющий точно определить константу ПИД-регулятора в соответствии с объектом. Производительность ПИД-регулятора может быть улучшена. На этом рис показан принцип действия ПИД-регулятора.
Общие свойства, используемые в регулировании промежуточной системы, другие включают стабильность, точность, скорость отклика и чувствительность.
При пропорциональном управлении выход системы управления будет пропорционален входу. Выходной сигнал является усилением сигнала ошибки с определенными факторами. Фактор усиления представляет собой пропорциональную константу системы, которая выражается через Kp. Здесь КП имеет высокое быстродействие. Интегральное управление выходным сигналом всегда изменяется при отклонениях, а скорость, с которой выходной сигнал изменяется, пропорциональна отклонению, константе, выраженной как Ki, где Ki имеет высокую чувствительность, т.е. за счет уменьшения ошибки, генерируемой сигналом обратной связи. Чем больше значение Ki, тем выше чувствительность, но время, необходимое для более быстрого достижения стабильности, также наоборот. Производное управление работает по изменению отклонения скорости. Этот тип управления всегда используется вместе с пропорциональными и интегральными регуляторами. Эти константы выражены в Kd, и где Kd влияет на стабильность системы из-за управляющего воздействия, способного уменьшить ошибки. Ожидается, что путем объединения этих действий ПИД-регулирования будет получен ответ с высоким уровнем стабильности.Асинхронная машина (беличья клетка)
Машина будет иметь две функции: двигатель или генератор. Асинхронная машина имеет трехфазный асинхронный двигатель, такой как машина с фазным ротором (машина с короткозамкнутым ротором). Функция определяется значением крутящего момента машины.
- Здесь Машина будет действовать как двигатель, когда значение Tm положительное.
- Машина будет действовать как генератор, когда значение Tm отрицательное.
Инструментальное значение компонента машины измеряется в таблице
Таблица 1. Параметры асинхронного/асинхронного двигателя
Номинальная мощность, напряжение (фаза-фаза), частота 746 ВА, 380 В, 50 Гц Сопротивление и индуктивность статора 0,009961 Ом, 0,000867 Н Сопротивление и индуктивность ротора 0,005837 Ом, 0,000867 Н Взаимная индуктивность 0,03039 Н Инерция, коэффициент трения, пары полюсов 0,4, 0,02187, 2 Универсальный мост
Универсальный мост представляет собой универсальный преобразователь напряжения для трехфазной системы электропитания.
Он содержит 6 переключателей, которые соединены в мост. Универсальный мост может быть компонентом силовых электронных устройствЗначение измерения этого универсального моста можно описать в таблице 2.
Таблица 2. Значение измерения блока компонентов универсального моста
Устройства силовой электроники БТИЗ/диоды Количество плеч моста 3 Резьбовое сопротивление 1e5 Ом Ослабленная емкость инф Рон 1e-3 Ом Тф, Тт 1e-6 с, 1e-6 с Генератор ширины импульса
Широтно-импульсная модуляция (ШИМ) простым способом — это способ управления шириной сигнала, выраженной в импульсах за период, для получения другого среднего напряжения.
Примерами приложений PWM являются модуляция данных для телекоммуникаций, управление мощностью или напряжением, поступающим на регуляторы напряжения нагрузки, звуковые эффекты и усиление, а также другие применения. Простейшая генерация сигнала ШИМ заключается в сравнении пилообразного сигнала в качестве несущего напряжения с опорным напряжением с использованием схемы компаратора на операционном усилителе. Работа этого аналогового компаратора заключается в сравнении волн пилообразного напряжения с эталонным напряжением. И когда опорное напряжение больше несущего напряжения (пилообразное), выход компаратора будет высоким. Когда опорное напряжение меньше несущего напряжения, выходной сигнал компаратора будет низким. Используя принцип работы этого компаратора, для изменения скважности выходного сигнала достаточно изменить опорное напряжение.Система открытого цикла
Система открытого цикла состоит из 4 основных компонентов. Это универсальный мостовой ШИМ-генератор постоянного тока и асинхронная машина.
В разомкнутой системе они не имеют обратной связи для управления скоростью. Так как скорость зависит от величины постоянного напряжения питания. Система управления без обратной связи традиционно используется в некоторых асинхронных двигателях. Управление простое, поскольку содержит несколько компонентов для реализацииСистема с замкнутым контуром
Улучшение разомкнутой системы замкнутого цикла. Замкнутая система состоит из основного компонента f5. Этими компонентами являются управляемый источник напряжения, блок ПИД-регулятора, блок универсального моста, блок генератора ШИМ и машина с асинхронным двигателем. Датчик скорости системы с замкнутым контуром, используемый в качестве сигнала обратной связи для задания уставки. Требуемая ошибка – это разница между фактической скоростью и заданным значением оборотов в минуту. ПИД-регулятор обрабатывает эту ошибку как управляющий сигнал для управляемых источников напряжения.
Управляемый источник напряжения создает переменное выходное напряжение постоянного тока в качестве входного сигнала для универсального моста.
Универсальный мост для преобразования постоянного напряжения в переменное от источника регулируемого напряжения. Мост генерирует трехфазное напряжение для питания асинхронного двигателя. Скорость асинхронного двигателя определяется величиной 3-х фазного напряжения и частотой выходного универсального моста. Скорость регулируется, чтобы получить ближайшее значение на основе заданной скорости об/мин.
Результаты и обсуждение
Здесь результаты линейного напряжения фазного напряжения тока в линии перечислены вместе с результатами скорости и крутящего момента асинхронного двигателя на следующем рисунке
Результаты системы без обратной связи Вак. Асинхронный двигатель использует это напряжение для работы в соответствии с номинальным напряжением.
Асинхронный двигатель выдает ток статора 35 А. Ток одинаков для каждой фазы, потому что асинхронный двигатель является сбалансированной нагрузкой.
Таким образом, установившаяся скорость асинхронного двигателя составляет 1500 об/мин.
На этом рисунке можно показать реакцию системы с разомкнутым контуром. Реакция системы без обратной связи: время нарастания (tr) = 0,7 с, время задержки (td) = 0,55 с, время пика (tp) = 0,73 с и время установившегося режима (ts) = 0,9 с.Результаты системы с замкнутым контуром
Значение напряжения на выходе инвертора составляет 85 В переменного тока. Асинхронный двигатель использует это напряжение для работы в соответствии с номинальным напряжением.
Асинхронный двигатель производит ток статора 30 А. Ток одинаков для каждой фазы, потому что асинхронный двигатель является сбалансированной нагрузкой.
Таким образом, установившаяся скорость асинхронного двигателя составляет 1420 об/мин. Реакция системы с замкнутым контуром может быть показана на этом рисунке. Отклик системы с замкнутым контуром: время нарастания (tr) = 0,02 с, время задержки (td) = 0,015 с, время пика (tp) = 0,025 с и время установившегося состояния (ts) = 0,2 с.
Заключение
Из результатов получено, что управление асинхронным двигателем с помощью ПИД-регулятора и универсального моста дает лучшую реакцию, чем без ПИД-регулирования. Система с разомкнутым контуром, время достижения установившейся скорости составляет 0,9секунд, в то время как в системе с замкнутым контуром время достижения установившейся скорости составляет 0,2 секунды. Что показывает, что ПИД-регулятор получил более быструю реакцию, чем без регулятора. можно сделать вывод, что предлагаемая система имеет хорошие возможности управления скоростью асинхронного двигателя.
Методы управления скоростью асинхронного двигателя
Хотите создать сайт? Найдите бесплатные темы и плагины WordPress.
В этой статье мы подробно рассмотрели методы управления скоростью асинхронного двигателя вместе с их принципиальными схемами:
Управление скоростью путем изменения числа полюсов
Управление скоростью путем изменения частоты
Управление скоростью по методу Крамера
Электронное управление частотойКрутящий момент создается в асинхронном двигателе за счет взаимодействия двух магнитных полей.
Первое вращающееся магнитное поле создается токами, протекающими в обмотках статора. Это вращающееся поле разрезает проводники в роторе и индуцирует в них напряжение. Напряжение ротора вызывает протекание тока в роторе и создает второе магнитное поле.Два магнитных поля взаимодействуют друг с другом и заставляют ротор вращаться в направлении вращения поля статора. Он разгоняется примерно до 96 % скорости вращения поля статора. Эта 4-процентная разница в скорости при полной нагрузке является скоростью проскальзывания. Без скольжения асинхронный двигатель не может развивать крутящий момент.
Скорость асинхронного двигателя всегда определяется вращающимся магнитным полем в статоре. Это поле статора всегда вращается с синхронной скоростью, определяемой двумя факторами:
1. Количество пар полюсов
2. Частота приложенного напряжения.Синхронную скорость можно найти по формуле:
Число 120 получается из произведения количества секунд в минуте и того факта, что магнитные полюса всегда идут парами.
Две другие величины называются переменными.Важно отметить, что переменных всего две.
При увеличении частоты скорость увеличивается:
Если число полюсов увеличивается, скорость уменьшается:
Эти два основных принципа являются единственными факторами, которые могут повлиять на изменение скорости асинхронного двигателя, хотя методы, принятые для достижения этого, много.
Управление скоростью путем изменения числа полюсов
Изменение числа полюсов в обмотке статора всегда связано с резким скачком от одной скорости к другой. При питании с частотой 50 Гц двухполюсный асинхронный двигатель будет вращаться со скоростью 3000 об/мин (без учета скорости скольжения). Если заменить четырехполюсный статор, скорость быстро изменится до 1500 об/мин.
Изменение скорости может передавать незначительные переходные процессы в линии питания. В больших асинхронных двигателях следует вводить короткую выдержку времени при переключении с одной обмотки на другую.
Наиболее распространенный метод заключается в разработке обмоток, которые могут быть соединены между собой для изменения числа полюсов. Это всегда соотношение 1:2, то есть двухполюсная обмотка преобразуется в четырехполюсную, четырехполюсная — в восьмиполюсную и т. д.
На рис. 1(a) показаны принцип и соединения, необходимые для преобразования четырехполюсного в восьмиполюсное. Рисуется только одна фаза; маленькие прямоугольники используются для обозначения групп полюсов и фаз, а стрелки указывают направление намотки. Необходимо, чтобы обмотки полюсов были соединены попарно друг напротив друга, как показано на рисунке.
Рисунок 1 Последовательно-параллельное соединение двухскоростного асинхронного двигателя
Обратите внимание, что центральный отвод ( T A ) обмотки выведен наружу, чтобы к нему был доступ снаружи. В Рисунок 1 (b), четыре полюсно-фазные обмотки были перерисованы вертикальной линией.
Если A 1 и A 2 соединены перемычкой и подключены к линии L 2 , а центральный ответвитель T A подключен к линии L 1 , двигатель будет иметь четыре обычных полюса, как показано стрелками.В Рисунок 1(c) мост был удален. A 1 повторно подключается к линии L 1 , а A 2 остается подключенной к линии L 2 . Как показано стрелками, ток течет последовательно через все четыре группы полюсов, и все они имеют одинаковую полярность, например, как показано, будет четыре северных полюса.
Магнитный поток отклоняется в статоре и выходит между северными полюсами, как показано пунктирными линиями. Результирующая магнитная цепь асинхронного двигателя представляет собой магнитную цепь восьмиполюсной машины.
Чтобы обойти это ограничение соотношения 1:2, некоторые статоры были спроектированы так, чтобы иметь две электрически отдельные обмотки. Одновременно используется только одна обмотка.
Соотношение этих обмоток не обязательно должно быть 1:2, но может быть любым разумным соотношением. Например, одна обмотка может быть двухполюсной, а другая — шестиполюсной.При активации двухполюсной обмотки асинхронный двигатель будет вращаться со скоростью 3000 об/мин. В течение этого периода другая обмотка, если она не подключена по схеме «звезда», должна иметь разомкнутые мосты треугольника, чтобы предотвратить протекание наведенных токов в неиспользуемой обмотке. При наличии подходящего переключателя обмотки можно было бы поменять местами без остановки двигателя или связанной с ним машины. Затем асинхронный двигатель изменит скорость до 1000 об/мин.
Ступенчатое управление скоростью с полюсной амплитудной модуляцией (PAM) является менее известной системой. Он был разработан для близких скоростей, таких как замена четырехполюсника на шестиполюсник и восьмиполюсника на десятиполюсник. Он основан на принципе неравных групп катушек внутри асинхронного двигателя при его изготовлении.
Соединения выполняются с помощью специальных контакторов для управления ступенями скорости.Обмотки PAM защищены авторским правом, но могут производиться по лицензии. Двигатели PAM имеют мощность всего 0,5 кВт, но производятся и мощностью до 7 МВт.
Управление скоростью путем изменения частоты
Одним из важных аспектов этого метода управления скоростью является то, что при более высоких частотах стандартный асинхронный двигатель работает со скоростью, значительно превышающей расчетную. При повышенных скоростях улучшается циркуляция воздуха, в результате чего улучшается охлаждение.
Лучшее охлаждение позволяет использовать более высокие плотности тока, даже несмотря на повышенные потери на трение и сопротивление воздуха из-за более высоких скоростей. Существуют также повышенные потери в железе из-за более высоких частот. При более высоких частотах сопротивление обмоток также увеличивается и для обеспечения постоянной индукции в воздушном зазоре требуется более высокое напряжение питания.
При постоянной плотности потока в воздушном зазоре крутящий момент пропорционален протекающему току.
Поскольку мощность зависит как от крутящего момента, так и от скорости, можно видеть, что выходная мощность асинхронного двигателя увеличивается быстрее, чем скорость.
Повышение частоты всей установки приведет к тому, что все двигатели будут работать с более высокой скоростью, а это не всегда желательно. Уменьшение частоты приведет к тому, что все двигатели будут работать медленнее, и приведет к тому же нежелательному результату.
В общем случае изменение частоты как метод управления скоростью ограничивается конкретными машинами или группами машин, как, например, в ряде транспортных роликов на сталелитейном заводе.
Существует два основных метода изменения частоты. Первый использует вращающееся оборудование для достижения желаемого результата. Это дорого, хотя и менее эффективно, чем некоторые другие методы, но опыт показал, что он чрезвычайно надежен и требует минимального обслуживания.
Поэтому он до сих пор широко используется.Второй метод использует электронное переключение для синтеза волны переменного тока неправильной формы из постоянного тока. Это сравнительно новая процедура, и она стала очень популярной.
Вращающееся оборудование для регулирования частоты
Одной из распространенных систем управления двигателем является двигатель Шраге, в котором скорость изменяется путем регулировки положения щеток для каждой фазы.
На рис. 2 показан другой метод управления скоростью. В данном случае это метод Крамера для управления скоростью асинхронного двигателя с фазным ротором. Видно, что четыре вращающиеся машины используются для управления скоростью одного двигателя.
Рисунок 2 Привод Kramer с использованием вращающихся машин
Система может быть экономически оправдана только для очень больших асинхронных двигателей или объединенных групп двигателей в тяжелой промышленности.
Там, где двигатели Schrage имеют практические ограничения, система Kramer может быть построена в диапазоне мегаватт. Надежность и минимальное обслуживание хорошо зарекомендовали себя в обеих системах.Асинхронные двигатели с фазным ротором
Скольжение в любом асинхронном двигателе пропорционально потерям в меди ротора. В асинхронном двигателе с фазным ротором сопротивление ротора можно изменять с добавлением внешнего сопротивления, поэтому потери в меди и скорость вращения ротора можно регулировать с помощью контроллера.
Поскольку ток ротора пропорционален развиваемому крутящему моменту, из этого следует, что потери ротора будут изменяться в зависимости от приложенной нагрузки, что влияет на скорость. Этот метод управления скоростью характеризуется изменением скорости при изменении нагрузки; то есть увеличение нагрузки приводит к снижению скорости, а уменьшение нагрузки приводит к увеличению скорости.
По этой причине регулирование скорости асинхронного двигателя с фазным ротором путем изменения сопротивления ротора удовлетворительно только при постоянной нагрузке.
Скорости ниже половины скорости полной нагрузки нецелесообразны, а повышенные потери на более низких скоростях приводят к высоким рабочим температурам, которые могут превысить номинальные характеристики асинхронного двигателя. КПД двигателя низкий, регулирование скорости плохое, а внешние сопротивления потребляют расточительную энергию.Были опробованы различные методы контроля скорости. Два самых распространенных:
1 . Неравные напряжения, приложенные к обмоткам статора
2 . В обмотки ротора вставлены неодинаковые сопротивления.В отличие от описанных выше вращающихся машин, эти изменения скорости являются ступенчатыми. Вероятно, наиболее распространено применение в механизмах подъема и опускания мостовых кранов.
Электронный регулятор частоты
Быстрый прогресс в области полупроводниковых технологий привел к гораздо более эффективным и действенным средствам изменения частоты сети.
На рис. 3 показаны блок-схемы инверторных приводов.Рисунок 3 Блок-схемы частотно-регулируемых приводов
Трехфазное питание сначала преобразуется в питание постоянного тока. Есть по крайней мере два возможных метода преобразования в общем использовании. Один из них заключается в использовании фиксированной или неуправляемой схемы выпрямителя, а другой — в использовании схемы управляемого выпрямителя. Каждый тип схемы имеет свои преимущества и недостатки.
Неуправляемые выпрямители
Выходное напряжение схемы неуправляемого выпрямителя (например, мостового выпрямителя) зависит от входного напряжения переменного тока. Затем выход постоянного тока подается на схему «прерывателя». Его функция состоит в том, чтобы включать и выключать постоянный ток со скоростью, превышающей основную частоту источника питания. Действие включения/выключения регулирует средний уровень напряжения постоянного тока, подаваемого на инвертор.
На рис. 3(a) показана приблизительная прямоугольная форма выходного сигнала прерывателя. Затем он проходит через схему фильтра, чтобы удалить столько переходных процессов и пиков, сколько экономически целесообразно, и затем становится входом в схему инвертора.
Управляемые выпрямители
Схема управляемого выпрямителя, такая как схема, использующая управляемые кремнием выпрямители с фазовой регулировкой, имеет преимущества быстрого отклика, относительной дешевизны и способности поддерживать рекуперативное действие подачи энергии обратно в сеть. Его недостаток заключается в том, что он работает с отстающим коэффициентом мощности.
Поскольку постоянный ток от управляемого выпрямителя не нужно подавать через схему прерывателя, эта схема имеет тенденцию быть менее сложной и, возможно, более эффективной. Выход обычно фильтруется перед подачей в секцию инвертора (см. Рисунок 3(b) ).
Для обеспечения оптимальной работы асинхронного двигателя переменного тока с переменной частотой питания необходимо поддерживать расчетные условия магнитного потока в магнитной цепи асинхронного двигателя.
Обычно это достигается поддержанием постоянного отношения напряжения питания к частоте. Любое изменение частоты должно сопровождаться изменением напряжения, то есть:Фактический тип цепи и метод управления во многом зависят от применения асинхронного двигателя. Баланс должен быть выбран между желаемыми факторами скорости, крутящего момента и мощности.
Другими факторами, влияющими на это, являются тип цепей в блоке и то, посылает ли конечный выход сигнал собственной производительности на вход блока для контроля и самонастройки блока.
Обобщая:
A. Инвертор управляет выходной частотой.
B. Напряжение двигателя задается напряжением звена постоянного тока.
C. Можно управлять другими параметрами, такими как ток, минимальная и максимальная скорость компенсации скольжения и компенсации скольжения.
D. Ускорение и увеличение и уменьшение пускового тока можно контролировать.Рисунок 4 Типовой электронный блок управления частотой вращения асинхронного двигателя
Методы управления скоростью асинхронного двигателя перечислены в Таблица 1 .
Таблица 1 Методы управления скоростью асинхронного двигателя
Тип двигателя Скоростная характеристика, от холостого хода до полной нагрузки Способ регулирования скорости Переменный ток, короткозамкнутый ротор, многоскоростной Падение скорости до 5 % от или двух или более начальных скоростей 91. Обмотки с разным числом полюсов или переподключение одной обмотки для изменения числа полюсов Переменный ток, короткозамкнутая обмотка, односкоростная Падение скорости до 15 %, в зависимости от конструкции Контроль первичного напряжения.
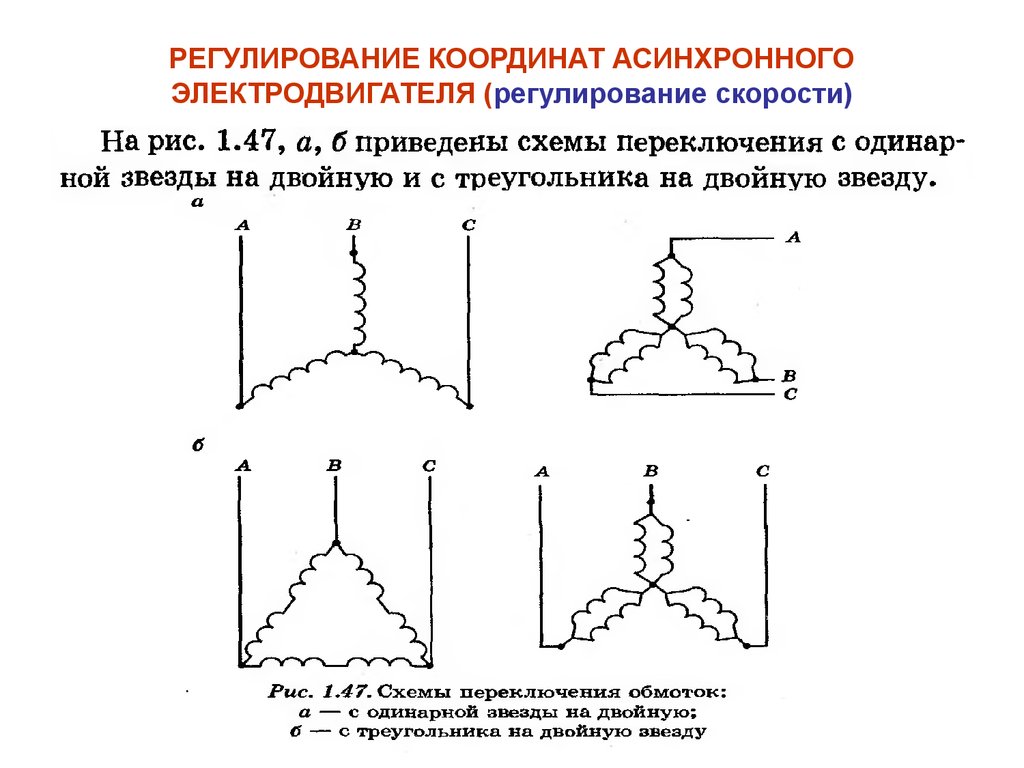 е. метод управления напряжением, метод контроля сопротивления, метод контроля частоты и метод переключения полюсов.
е. метод управления напряжением, метод контроля сопротивления, метод контроля частоты и метод переключения полюсов. Если напряжение ротора увеличивается, то крутящий момент будет увеличиваться, следовательно, скорость вращения ротора будет увеличиваться, а скольжение будет уменьшаться. Во втором способе мы уменьшаем напряжение в роторе, тогда уменьшится крутящий момент и, соответственно, увеличится скорость, а скольжение уменьшится. Привод Шербиуса является лучшим примером такого рода операций.
Если напряжение ротора увеличивается, то крутящий момент будет увеличиваться, следовательно, скорость вращения ротора будет увеличиваться, а скольжение будет уменьшаться. Во втором способе мы уменьшаем напряжение в роторе, тогда уменьшится крутящий момент и, соответственно, увеличится скорость, а скольжение уменьшится. Привод Шербиуса является лучшим примером такого рода операций.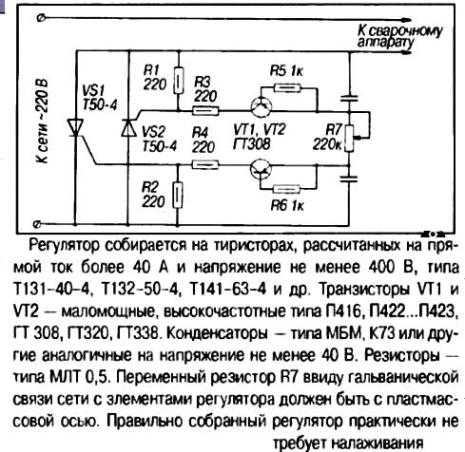 Ltd.Windsor IT Park, Башня — A, 2-й этаж,
Ltd.Windsor IT Park, Башня — A, 2-й этаж, Таким образом, есть три фактора, а именно частота питания f, число полюсов P и скольжение s, от которых зависит скорость асинхронного двигателя. Следовательно, чтобы изменить скорость асинхронного двигателя, необходимо изменить хотя бы один из трех вышеуказанных факторов.
Таким образом, есть три фактора, а именно частота питания f, число полюсов P и скольжение s, от которых зависит скорость асинхронного двигателя. Следовательно, чтобы изменить скорость асинхронного двигателя, необходимо изменить хотя бы один из трех вышеуказанных факторов.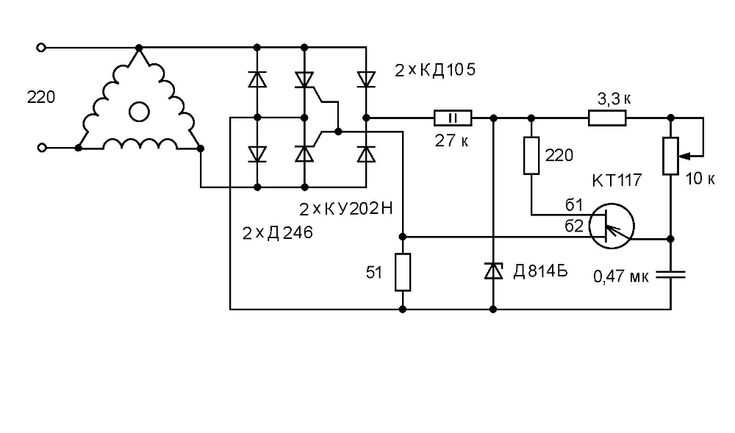 Комплект, состоящий из регулируемого асинхронного двигателя и одной или нескольких дополнительных электрических машин, соединенных с ним электрически или механически, называется каскадом. Коллекторные машины обычно используются в качестве дополнительных машин.
Комплект, состоящий из регулируемого асинхронного двигателя и одной или нескольких дополнительных электрических машин, соединенных с ним электрически или механически, называется каскадом. Коллекторные машины обычно используются в качестве дополнительных машин.
 е. от номинальной скорости к более низким скоростям.
е. от номинальной скорости к более низким скоростям. В противном случае некоторые из токопроводящих ремней ротора будут создавать отрицательный крутящий момент.
В противном случае некоторые из токопроводящих ремней ротора будут создавать отрицательный крутящий момент.
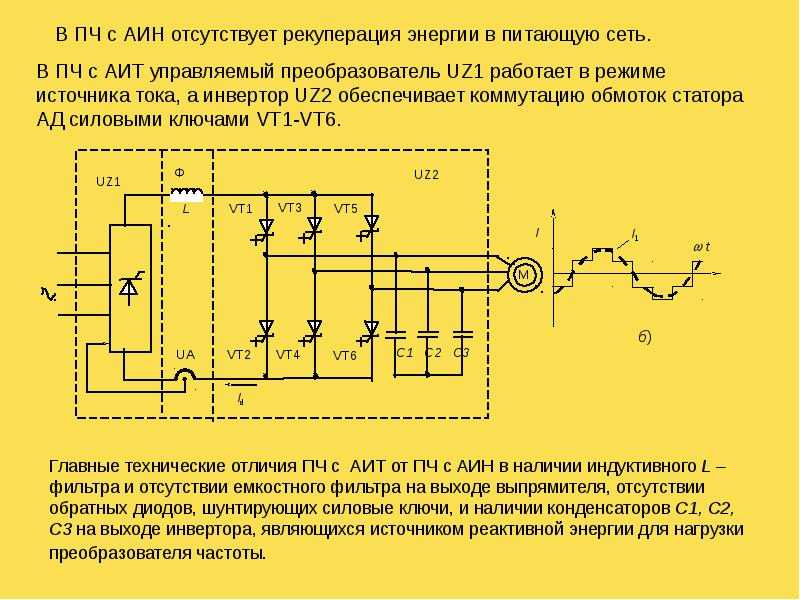
 1.84. Путем параллельного последовательного соединения групп 2-4 с группами 1-3 полярность групп 2 и 4 изменилась, так что теперь есть четыре последовательных северных полюса.
1.84. Путем параллельного последовательного соединения групп 2-4 с группами 1-3 полярность групп 2 и 4 изменилась, так что теперь есть четыре последовательных северных полюса. Благодаря уникальной схеме переключения можно иметь стандартное (или обычное) соединение на одной стороне двухпозиционного переключателя и последующее полюсное соединение на другой стороне переключателя. Таким образом, можно получить две скорости: более высокую скорость при обычном соединении и половинную скорость при последовательном соединении полюсов.
Благодаря уникальной схеме переключения можно иметь стандартное (или обычное) соединение на одной стороне двухпозиционного переключателя и последующее полюсное соединение на другой стороне переключателя. Таким образом, можно получить две скорости: более высокую скорость при обычном соединении и половинную скорость при последовательном соединении полюсов. Трех- и четырехскоростные двигатели снабжены двумя обмотками на статорах, одна или обе из которых выполнены с переменным числом полюсов. Например, если желательно получить двигатель для четырех синхронных скоростей; 1500, 1000, 750 и 500 об/мин на статоре должны располагаться две обмотки, одна из которых дает 4 и 8 полюсов, а другая — 6 и 12 полюсов.
Трех- и четырехскоростные двигатели снабжены двумя обмотками на статорах, одна или обе из которых выполнены с переменным числом полюсов. Например, если желательно получить двигатель для четырех синхронных скоростей; 1500, 1000, 750 и 500 об/мин на статоре должны располагаться две обмотки, одна из которых дает 4 и 8 полюсов, а другая — 6 и 12 полюсов. Однако этот метод очень удобен для приложений, таких как вентиляторы, конвейеры, станки или других приложений, которые требуют работы только на двух или четырех приблизительно постоянных скоростях, которые он обеспечивает. Преимущество этого метода заключается в простоте, хорошей регулировке скорости для каждой настройки, высокой эффективности и умеренных первоначальных затратах и обслуживании.
Однако этот метод очень удобен для приложений, таких как вентиляторы, конвейеры, станки или других приложений, которые требуют работы только на двух или четырех приблизительно постоянных скоростях, которые он обеспечивает. Преимущество этого метода заключается в простоте, хорошей регулировке скорости для каждой настройки, высокой эффективности и умеренных первоначальных затратах и обслуживании. Характеристики крутящего момента для типичных скоростей показаны на рис. 1.86.
Характеристики крутящего момента для типичных скоростей показаны на рис. 1.86.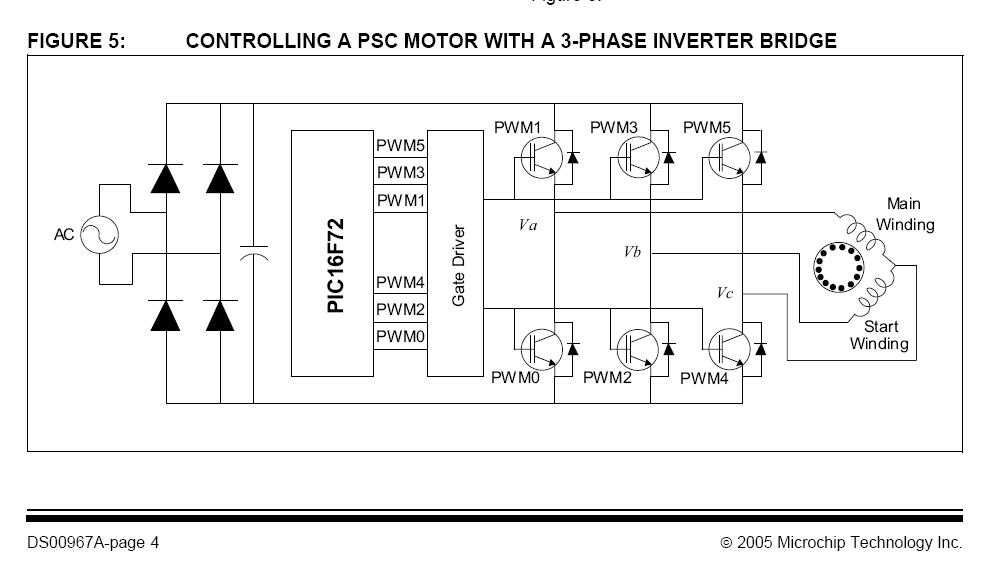 Очевидно, что этот метод можно применять только к двигателям с фазным ротором.
Очевидно, что этот метод можно применять только к двигателям с фазным ротором. Введение внешних резисторов в цепь ротора асинхронного двигателя с контактными кольцами изменит характеристики скорости и момента.
Введение внешних резисторов в цепь ротора асинхронного двигателя с контактными кольцами изменит характеристики скорости и момента.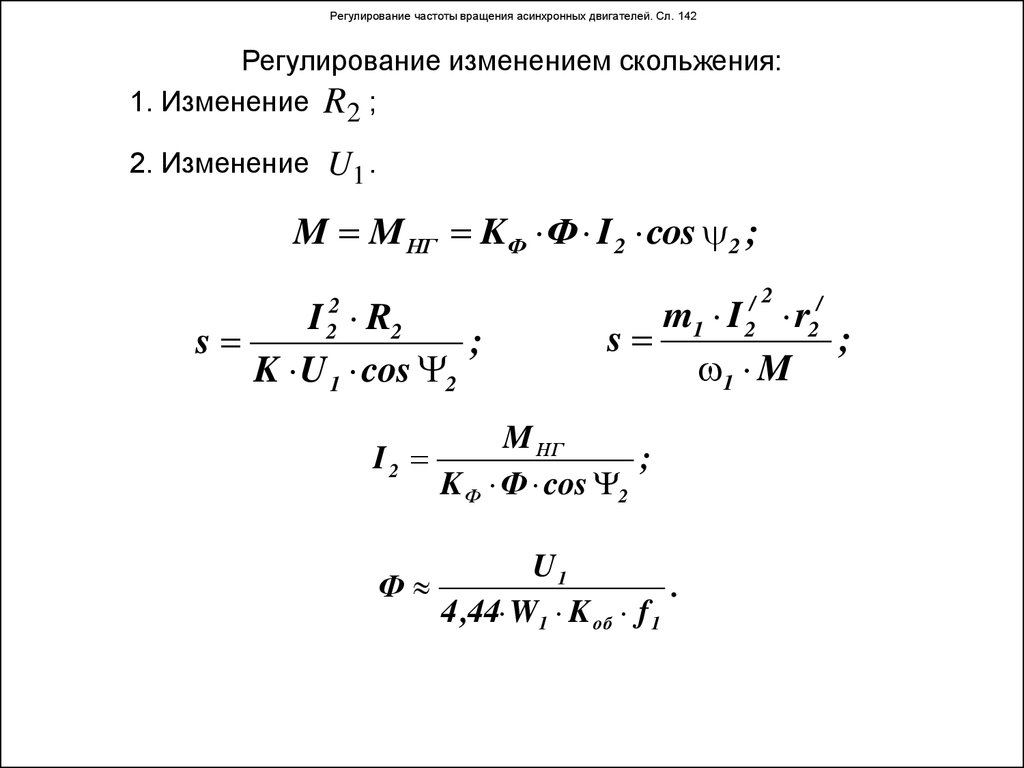 И наоборот, при уменьшении нагрузки сопротивление цепи ротора уменьшается; скорость увеличивается и маховик начинает запасать кинетическую энергию.
И наоборот, при уменьшении нагрузки сопротивление цепи ротора уменьшается; скорость увеличивается и маховик начинает запасать кинетическую энергию.
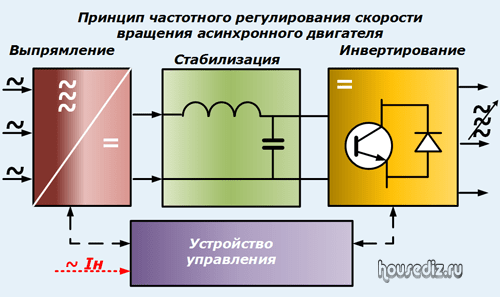

 Скорость асинхронного двигателя можно регулировать различными способами. В этой статье мы обсудим различные методы управления скоростью трехфазного асинхронного двигателя.
Скорость асинхронного двигателя можно регулировать различными способами. В этой статье мы обсудим различные методы управления скоростью трехфазного асинхронного двигателя. Эти методы кратко описаны ниже.
Эти методы кратко описаны ниже.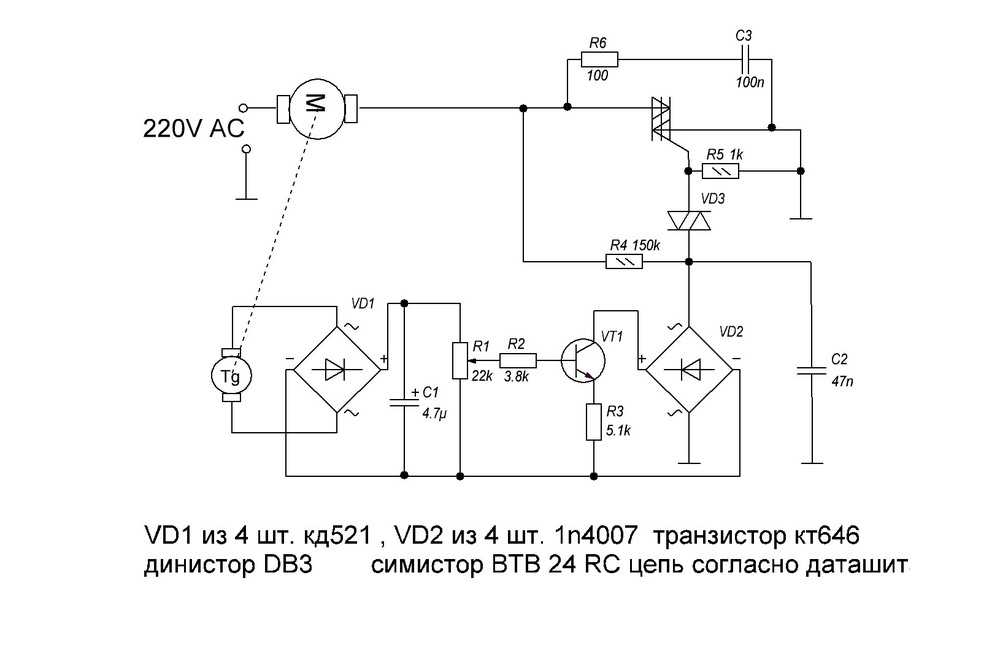
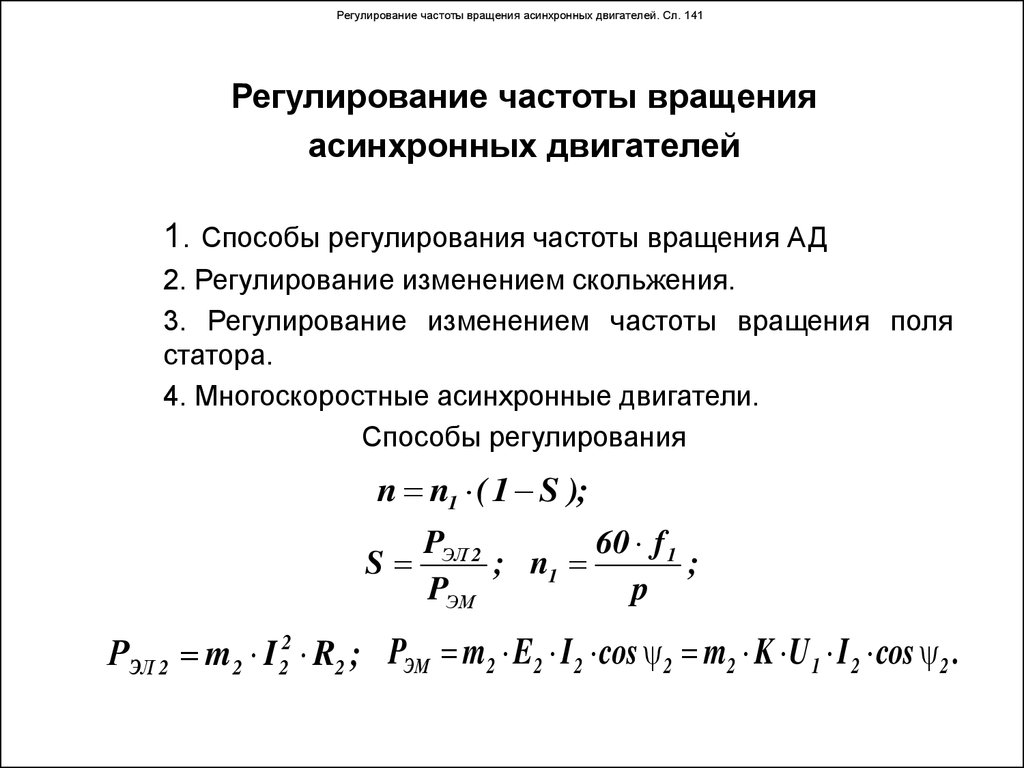 Генератор регулируемой частоты и инвертор звена постоянного тока.
Генератор регулируемой частоты и инвертор звена постоянного тока.
 Следовательно, скорость двигателя регулируется за счет управления сопротивлением ротора.
Следовательно, скорость двигателя регулируется за счет управления сопротивлением ротора.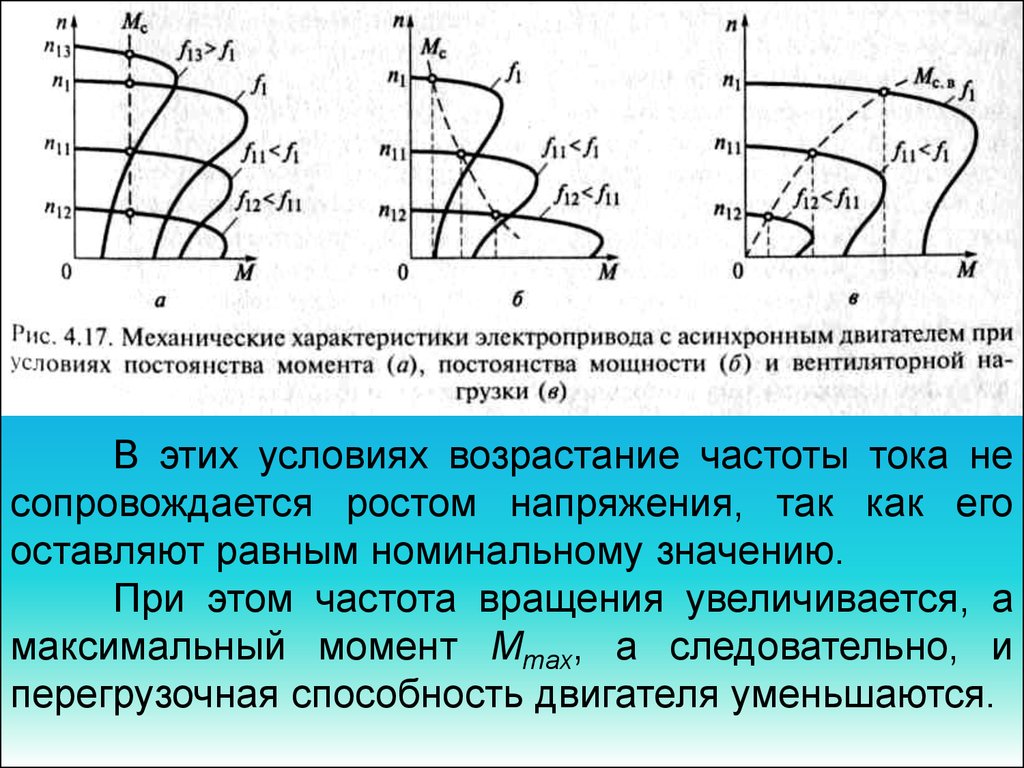
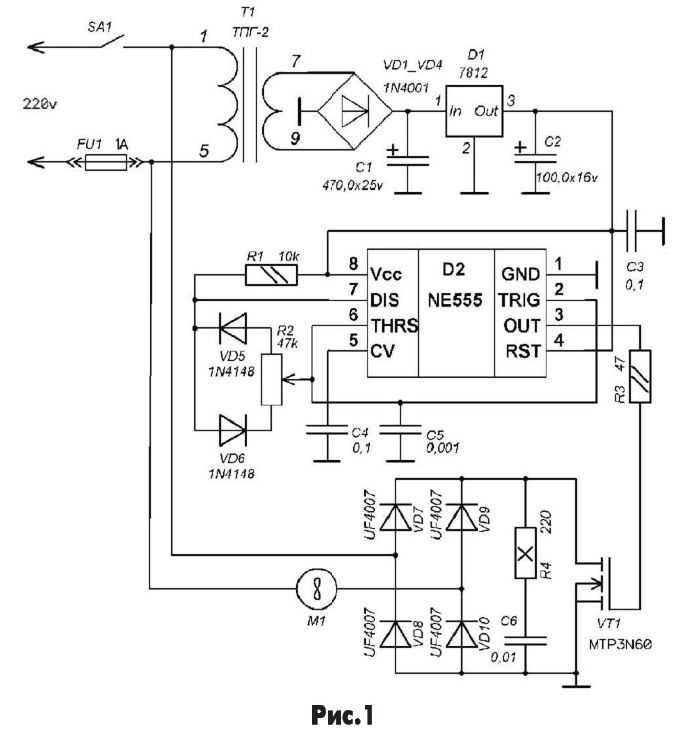

 И эта мощность постоянного тока используется для привода двигателя. Энергия постоянного тока подается от коммутатора роторного преобразователя к коммутатору двигателя постоянного тока через щетки.
И эта мощность постоянного тока используется для привода двигателя. Энергия постоянного тока подается от коммутатора роторного преобразователя к коммутатору двигателя постоянного тока через щетки. Напряжение, развивающееся внутри его ротора, через его коммутатор подается на коммутационную машину. Это подаваемое напряжение находится на частоте скольжения.
Напряжение, развивающееся внутри его ротора, через его коммутатор подается на коммутационную машину. Это подаваемое напряжение находится на частоте скольжения.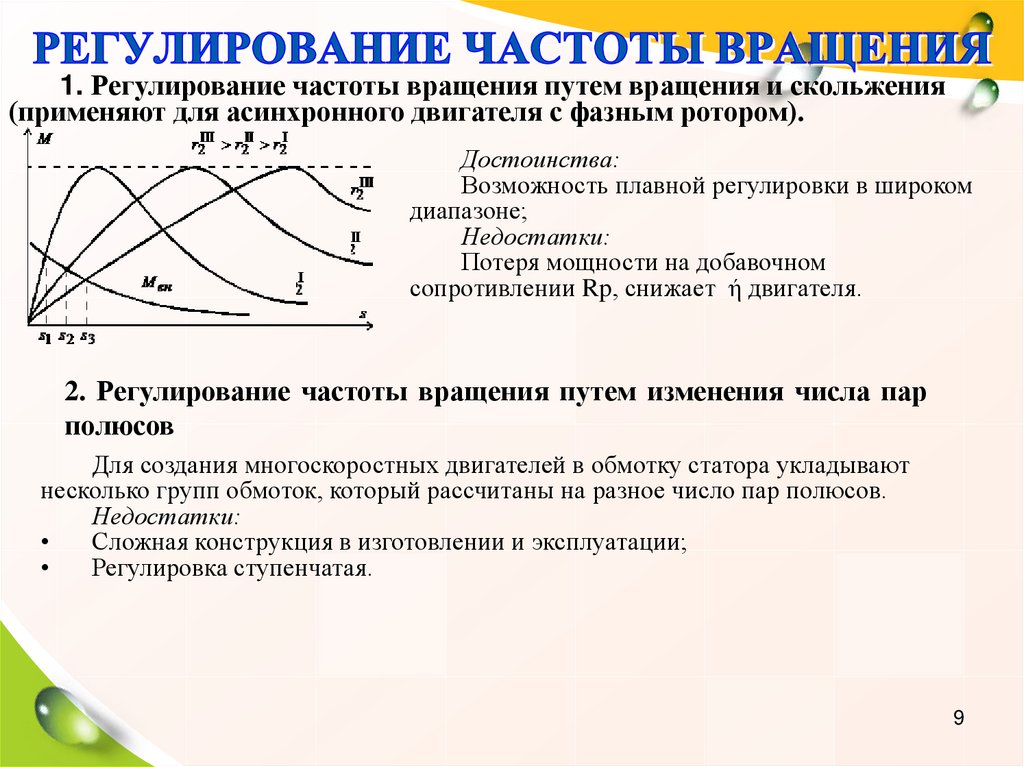 Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора напряжения. Метод управления скоростью, как правило, имеет важное значение в системе привода с регулируемой скоростью. Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора источника напряжения.
Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора напряжения. Метод управления скоростью, как правило, имеет важное значение в системе привода с регулируемой скоростью. Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора источника напряжения.
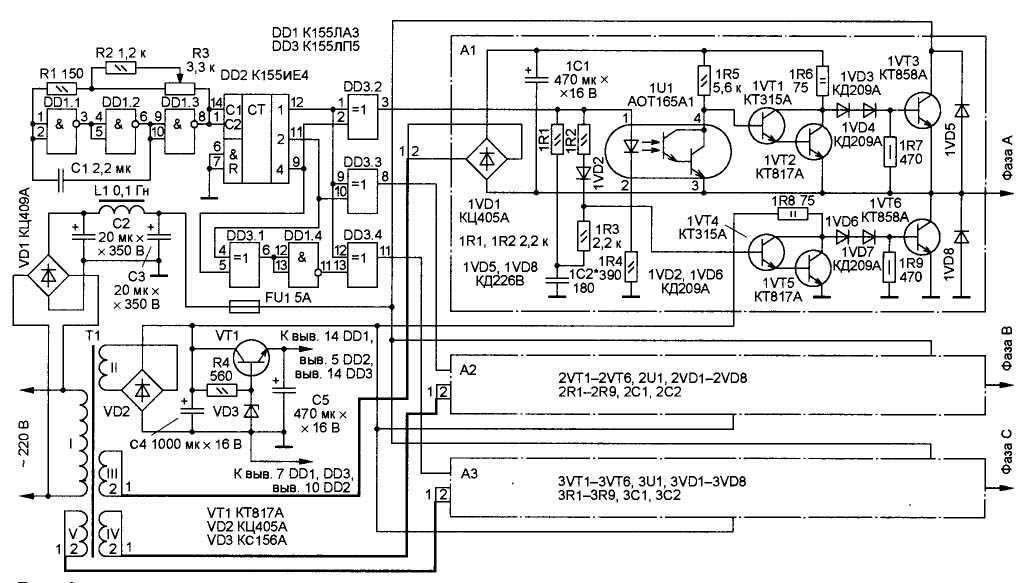 линеаризация. Из-за этих линейных характеристик методы не гарантируют надлежащую работу машины во всем рабочем диапазоне и не учитывают изменения параметров установленной нагрузки двигателя. Методы основаны на комплексных стратегиях управления, отличающихся от продвинутых методов управления, описанных здесь. Метод осуществляется путем регулировки ширины импульса и коэффициента заполнения импульса для установки среднего напряжения. Технология PWM сопровождается развитием электронных силовых устройств, имеет хорошее развитие, и в настоящее время оно созрело. Используя метод ШИМ, форму выходного сигнала инвертора можно улучшить, чтобы свести к минимуму гармоники и пульсации выходного крутящего момента. Способ уменьшения конструкции инвертора для ускорения уровня регулировки и за счет увеличения динамического отклика системы. В области электродвижения двигатель очень важен для комплектации двигателя с регулируемой скоростью.
линеаризация. Из-за этих линейных характеристик методы не гарантируют надлежащую работу машины во всем рабочем диапазоне и не учитывают изменения параметров установленной нагрузки двигателя. Методы основаны на комплексных стратегиях управления, отличающихся от продвинутых методов управления, описанных здесь. Метод осуществляется путем регулировки ширины импульса и коэффициента заполнения импульса для установки среднего напряжения. Технология PWM сопровождается развитием электронных силовых устройств, имеет хорошее развитие, и в настоящее время оно созрело. Используя метод ШИМ, форму выходного сигнала инвертора можно улучшить, чтобы свести к минимуму гармоники и пульсации выходного крутящего момента. Способ уменьшения конструкции инвертора для ускорения уровня регулировки и за счет увеличения динамического отклика системы. В области электродвижения двигатель очень важен для комплектации двигателя с регулируемой скоростью. Обмотки рассчитаны на трехфазную индукционную систему. Асинхронный двигатель обычно работает в приводах с регулируемой скоростью. Трехфазное переменное напряжение питает обмотку статора со сбалансированным напряжением. Статор индуцировал ротор магнитным потоком в качестве принципала трансформатора. Значение оборотов и крутящий момент асинхронного двигателя можно установить с помощью
Обмотки рассчитаны на трехфазную индукционную систему. Асинхронный двигатель обычно работает в приводах с регулируемой скоростью. Трехфазное переменное напряжение питает обмотку статора со сбалансированным напряжением. Статор индуцировал ротор магнитным потоком в качестве принципала трансформатора. Значение оборотов и крутящий момент асинхронного двигателя можно установить с помощью Основное правило трехфазного преобразователя постоянного тока в переменный состоит из 3 однофазных переключателей, которые подключены к одному из трех портов терминала нагрузки.
Основное правило трехфазного преобразователя постоянного тока в переменный состоит из 3 однофазных переключателей, которые подключены к одному из трех портов терминала нагрузки.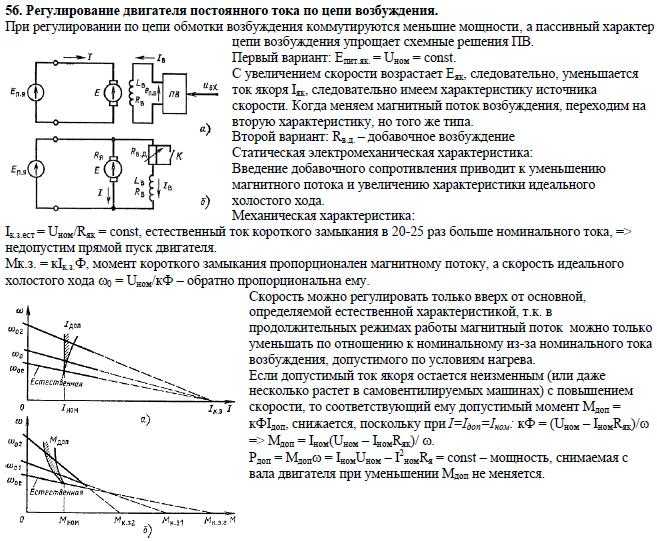 Статор содержит трехфазную обмотку, которая перемещается в пространстве на 120 градусов, когда трехфазное питание подается на обмотку статора, в статоре создается вращающийся магнитный поток (вращающийся с синхронной скоростью).
Статор содержит трехфазную обмотку, которая перемещается в пространстве на 120 градусов, когда трехфазное питание подается на обмотку статора, в статоре создается вращающийся магнитный поток (вращающийся с синхронной скоростью).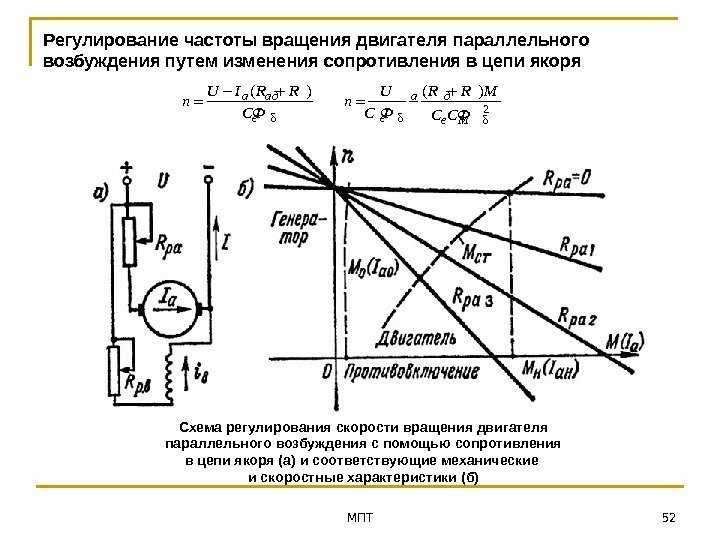 Расчетная минутная скорость вращающегося магнитного поля n0 может быть представлена следующим уравнением:
Расчетная минутная скорость вращающегося магнитного поля n0 может быть представлена следующим уравнением:
 При пропорциональном управлении выход системы управления будет пропорционален входу. Выходной сигнал является усилением сигнала ошибки с определенными факторами. Фактор усиления представляет собой пропорциональную константу системы, которая выражается через Kp. Здесь КП имеет высокое быстродействие. Интегральное управление выходным сигналом всегда изменяется при отклонениях, а скорость, с которой выходной сигнал изменяется, пропорциональна отклонению, константе, выраженной как Ki, где Ki имеет высокую чувствительность, т.е. за счет уменьшения ошибки, генерируемой сигналом обратной связи. Чем больше значение Ki, тем выше чувствительность, но время, необходимое для более быстрого достижения стабильности, также наоборот. Производное управление работает по изменению отклонения скорости. Этот тип управления всегда используется вместе с пропорциональными и интегральными регуляторами. Эти константы выражены в Kd, и где Kd влияет на стабильность системы из-за управляющего воздействия, способного уменьшить ошибки.
При пропорциональном управлении выход системы управления будет пропорционален входу. Выходной сигнал является усилением сигнала ошибки с определенными факторами. Фактор усиления представляет собой пропорциональную константу системы, которая выражается через Kp. Здесь КП имеет высокое быстродействие. Интегральное управление выходным сигналом всегда изменяется при отклонениях, а скорость, с которой выходной сигнал изменяется, пропорциональна отклонению, константе, выраженной как Ki, где Ki имеет высокую чувствительность, т.е. за счет уменьшения ошибки, генерируемой сигналом обратной связи. Чем больше значение Ki, тем выше чувствительность, но время, необходимое для более быстрого достижения стабильности, также наоборот. Производное управление работает по изменению отклонения скорости. Этот тип управления всегда используется вместе с пропорциональными и интегральными регуляторами. Эти константы выражены в Kd, и где Kd влияет на стабильность системы из-за управляющего воздействия, способного уменьшить ошибки.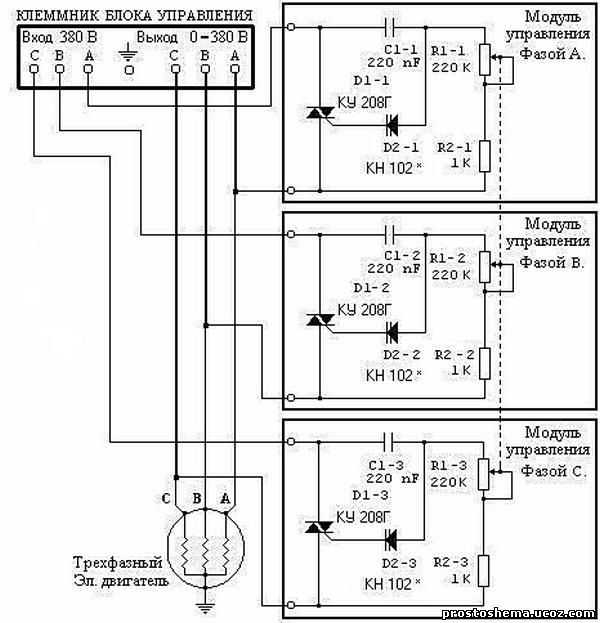 Ожидается, что путем объединения этих действий ПИД-регулирования будет получен ответ с высоким уровнем стабильности.
Ожидается, что путем объединения этих действий ПИД-регулирования будет получен ответ с высоким уровнем стабильности.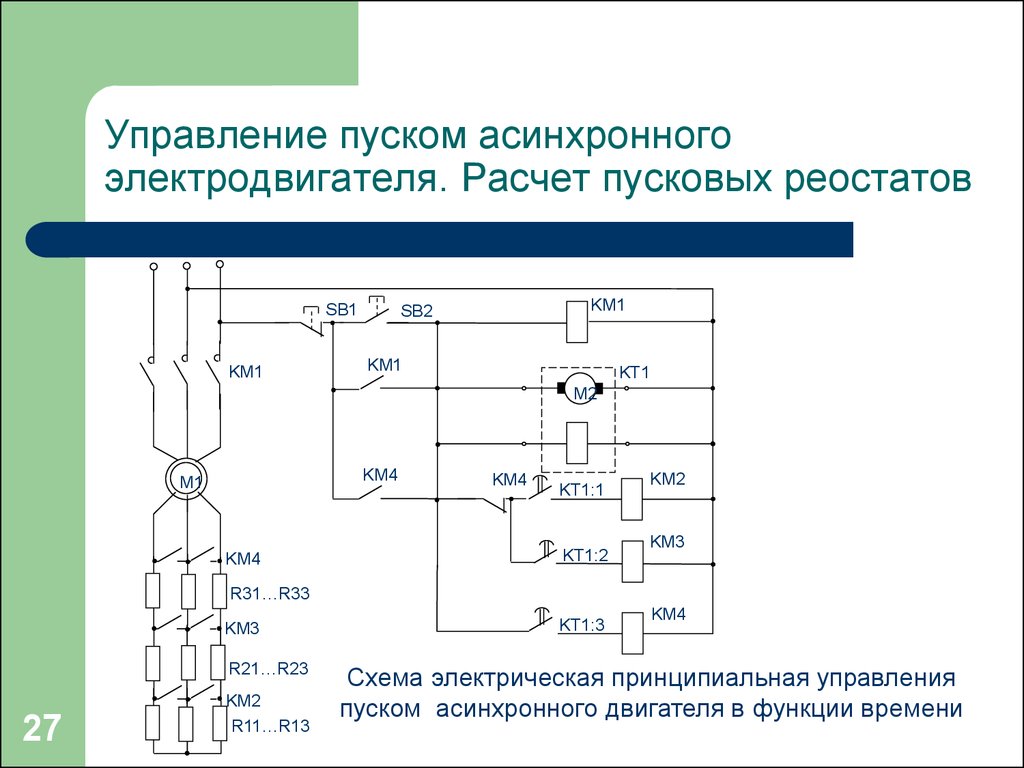 Он содержит 6 переключателей, которые соединены в мост. Универсальный мост может быть компонентом силовых электронных устройств
Он содержит 6 переключателей, которые соединены в мост. Универсальный мост может быть компонентом силовых электронных устройств Примерами приложений PWM являются модуляция данных для телекоммуникаций, управление мощностью или напряжением, поступающим на регуляторы напряжения нагрузки, звуковые эффекты и усиление, а также другие применения. Простейшая генерация сигнала ШИМ заключается в сравнении пилообразного сигнала в качестве несущего напряжения с опорным напряжением с использованием схемы компаратора на операционном усилителе. Работа этого аналогового компаратора заключается в сравнении волн пилообразного напряжения с эталонным напряжением. И когда опорное напряжение больше несущего напряжения (пилообразное), выход компаратора будет высоким. Когда опорное напряжение меньше несущего напряжения, выходной сигнал компаратора будет низким. Используя принцип работы этого компаратора, для изменения скважности выходного сигнала достаточно изменить опорное напряжение.
Примерами приложений PWM являются модуляция данных для телекоммуникаций, управление мощностью или напряжением, поступающим на регуляторы напряжения нагрузки, звуковые эффекты и усиление, а также другие применения. Простейшая генерация сигнала ШИМ заключается в сравнении пилообразного сигнала в качестве несущего напряжения с опорным напряжением с использованием схемы компаратора на операционном усилителе. Работа этого аналогового компаратора заключается в сравнении волн пилообразного напряжения с эталонным напряжением. И когда опорное напряжение больше несущего напряжения (пилообразное), выход компаратора будет высоким. Когда опорное напряжение меньше несущего напряжения, выходной сигнал компаратора будет низким. Используя принцип работы этого компаратора, для изменения скважности выходного сигнала достаточно изменить опорное напряжение. В разомкнутой системе они не имеют обратной связи для управления скоростью. Так как скорость зависит от величины постоянного напряжения питания. Система управления без обратной связи традиционно используется в некоторых асинхронных двигателях. Управление простое, поскольку содержит несколько компонентов для реализации
В разомкнутой системе они не имеют обратной связи для управления скоростью. Так как скорость зависит от величины постоянного напряжения питания. Система управления без обратной связи традиционно используется в некоторых асинхронных двигателях. Управление простое, поскольку содержит несколько компонентов для реализации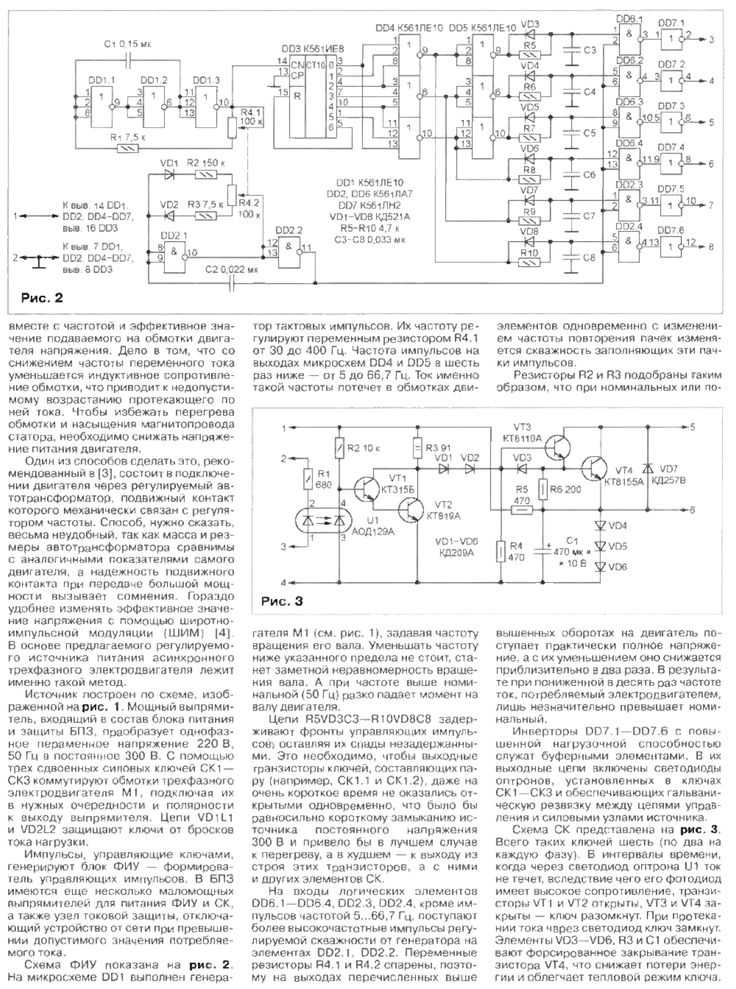
 На этом рисунке можно показать реакцию системы с разомкнутым контуром. Реакция системы без обратной связи: время нарастания (tr) = 0,7 с, время задержки (td) = 0,55 с, время пика (tp) = 0,73 с и время установившегося режима (ts) = 0,9 с.
На этом рисунке можно показать реакцию системы с разомкнутым контуром. Реакция системы без обратной связи: время нарастания (tr) = 0,7 с, время задержки (td) = 0,55 с, время пика (tp) = 0,73 с и время установившегося режима (ts) = 0,9 с.
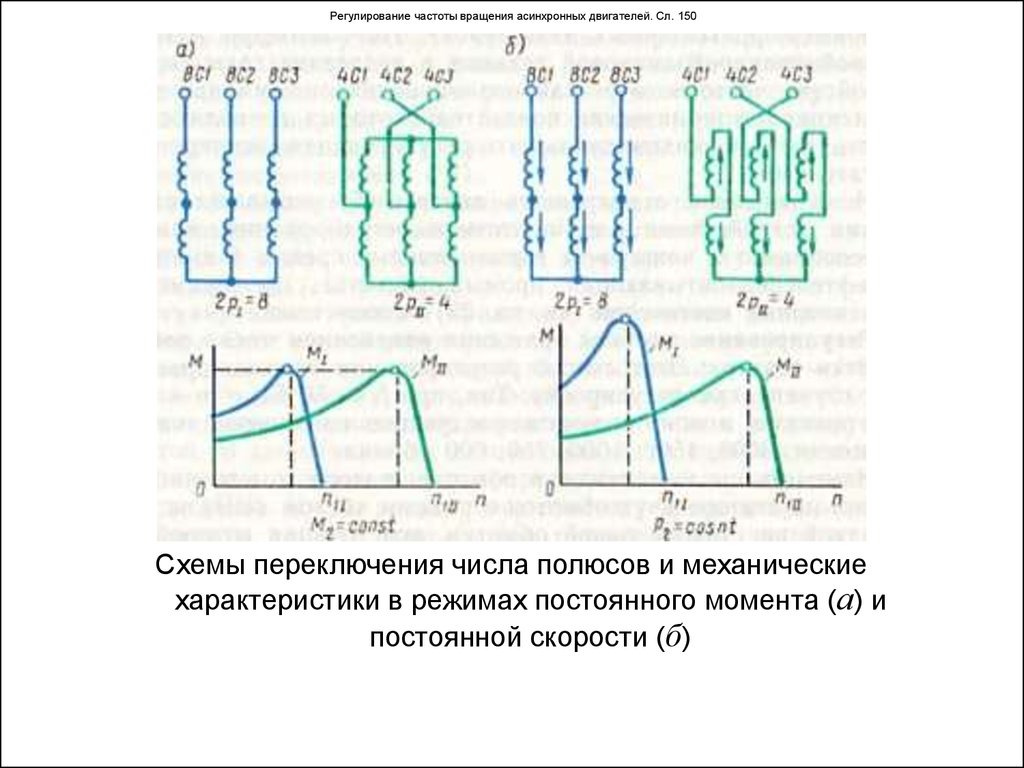 Первое вращающееся магнитное поле создается токами, протекающими в обмотках статора. Это вращающееся поле разрезает проводники в роторе и индуцирует в них напряжение. Напряжение ротора вызывает протекание тока в роторе и создает второе магнитное поле.
Первое вращающееся магнитное поле создается токами, протекающими в обмотках статора. Это вращающееся поле разрезает проводники в роторе и индуцирует в них напряжение. Напряжение ротора вызывает протекание тока в роторе и создает второе магнитное поле. Две другие величины называются переменными.
Две другие величины называются переменными.
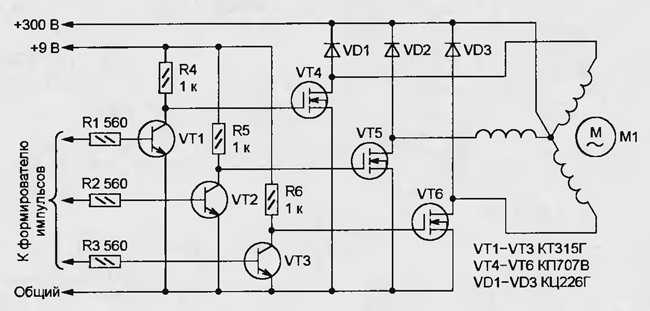 Если A 1 и A 2 соединены перемычкой и подключены к линии L 2 , а центральный ответвитель T A подключен к линии L 1 , двигатель будет иметь четыре обычных полюса, как показано стрелками.
Если A 1 и A 2 соединены перемычкой и подключены к линии L 2 , а центральный ответвитель T A подключен к линии L 1 , двигатель будет иметь четыре обычных полюса, как показано стрелками.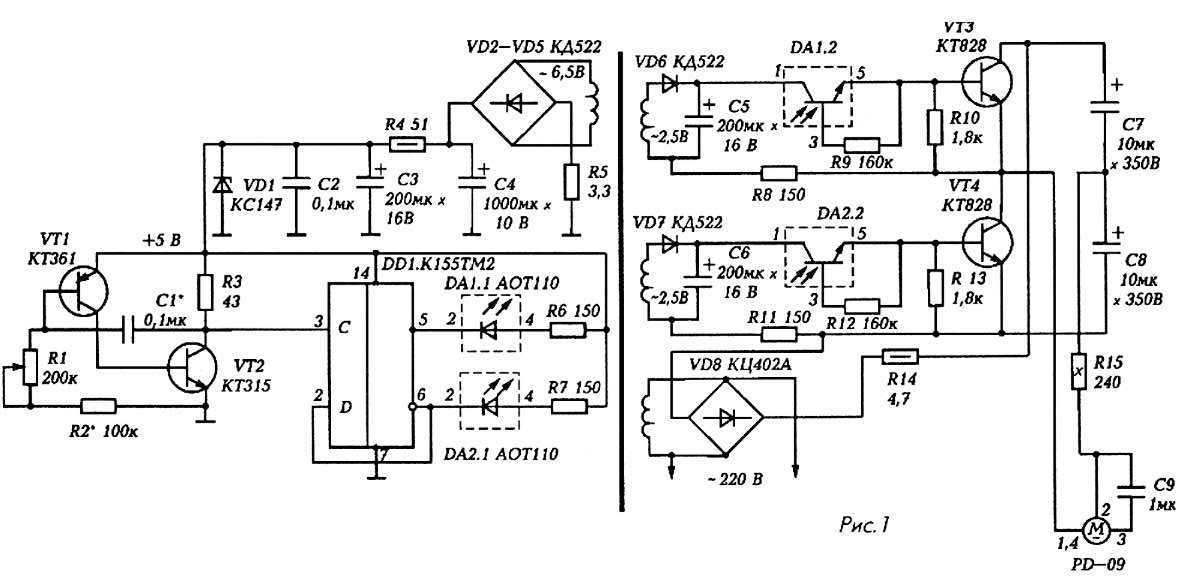 Соотношение этих обмоток не обязательно должно быть 1:2, но может быть любым разумным соотношением. Например, одна обмотка может быть двухполюсной, а другая — шестиполюсной.
Соотношение этих обмоток не обязательно должно быть 1:2, но может быть любым разумным соотношением. Например, одна обмотка может быть двухполюсной, а другая — шестиполюсной. Соединения выполняются с помощью специальных контакторов для управления ступенями скорости.
Соединения выполняются с помощью специальных контакторов для управления ступенями скорости.
 Поэтому он до сих пор широко используется.
Поэтому он до сих пор широко используется. Там, где двигатели Schrage имеют практические ограничения, система Kramer может быть построена в диапазоне мегаватт. Надежность и минимальное обслуживание хорошо зарекомендовали себя в обеих системах.
Там, где двигатели Schrage имеют практические ограничения, система Kramer может быть построена в диапазоне мегаватт. Надежность и минимальное обслуживание хорошо зарекомендовали себя в обеих системах. Скорости ниже половины скорости полной нагрузки нецелесообразны, а повышенные потери на более низких скоростях приводят к высоким рабочим температурам, которые могут превысить номинальные характеристики асинхронного двигателя. КПД двигателя низкий, регулирование скорости плохое, а внешние сопротивления потребляют расточительную энергию.
Скорости ниже половины скорости полной нагрузки нецелесообразны, а повышенные потери на более низких скоростях приводят к высоким рабочим температурам, которые могут превысить номинальные характеристики асинхронного двигателя. КПД двигателя низкий, регулирование скорости плохое, а внешние сопротивления потребляют расточительную энергию. На рис. 3 показаны блок-схемы инверторных приводов.
На рис. 3 показаны блок-схемы инверторных приводов.
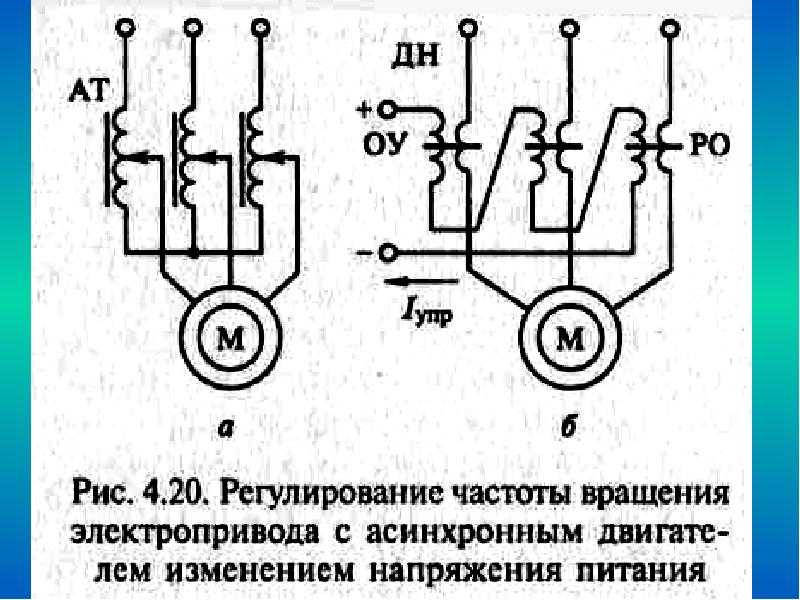 Обычно это достигается поддержанием постоянного отношения напряжения питания к частоте. Любое изменение частоты должно сопровождаться изменением напряжения, то есть:
Обычно это достигается поддержанием постоянного отношения напряжения питания к частоте. Любое изменение частоты должно сопровождаться изменением напряжения, то есть:
