Содержание
устройство, принцип работы, область применения
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы. Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название. Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент. Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей.
- Как устроен шаговый двигатель
- Принцип действия
- Виды и типы по полярности или типу обмоток
- Типы двигателей по конструкции ротора
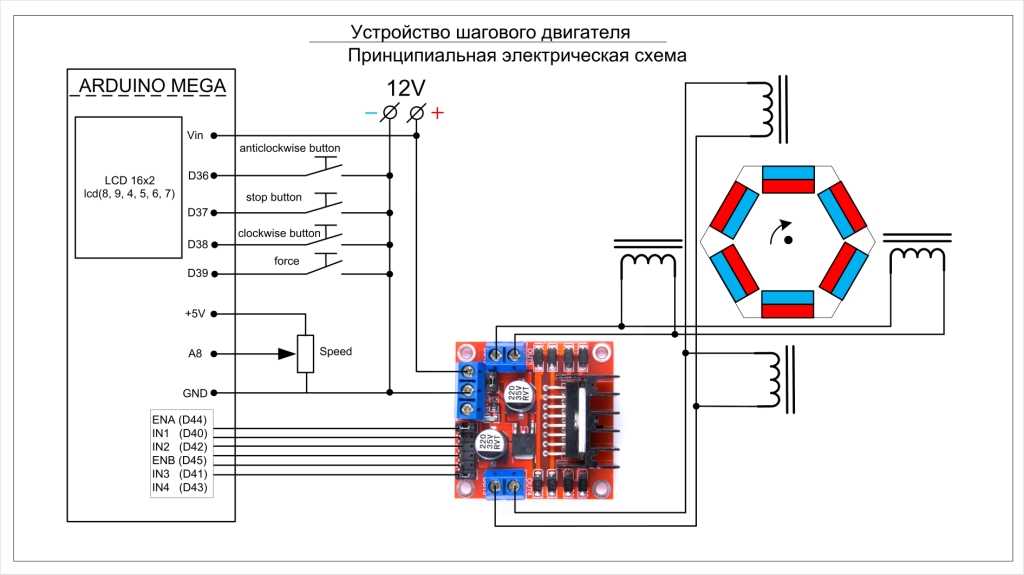
- Управление ШД
- Достоинства и недостатки шаговых электродвигателей
Как устроен шаговый двигатель
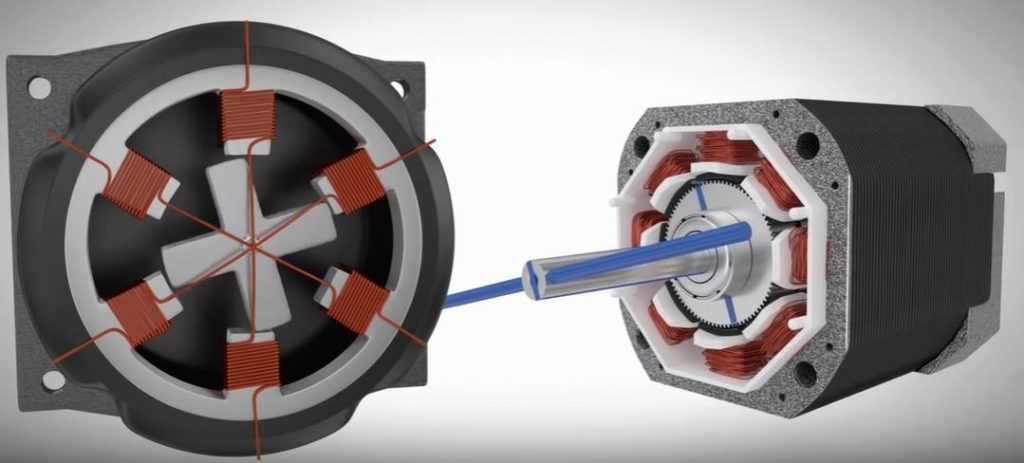
По своему типу это бесколлекторный синхронный электродвигатель. Состоит из статора и ротора. На роторе обычно расположены секции, набранные из листов электротехнической стали (на фотографии это «зубчатая» часть), а те, в свою очередь, разделены постоянными магнитами. На статоре расположены обмотки, в виде отдельных катушек.
Принцип действия
Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля. Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.
Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В. В этом случае электромагнитное поле станет противоположным положению 1, ротор двигатели сместится, и общий угол будет 180°.
При подаче напряжения обратной полярности на обмотки D и C, ротор повернется на угол до 270° относительно начальной позиции. При подключении положительного напряжения на обмотки А и В ротор займет первоначальное положение — закончит оборот на 360°. Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения. При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.
Типы двигателей по конструкции ротора
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
- с постоянным магнитом;
- с переменным магнитным сопротивлением;
- гибридные.

ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.
Электромоторы с переменным магнитным сопротивлением. Ротор данных машин изготавливается из магнитомягких сплавов, их также называют «реактивный шаговый двигатель». Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело. В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.
Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.
Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов. Такие двигатели имеют маленький шаг в пределах от 0,9 до 5°, обладают высоким моментом и удерживающей способностью. Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы.
Для примера в ШД на 200 шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот. Благодаря этому у ротора есть 100 полюсов с обратной полярностью.
То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме 100.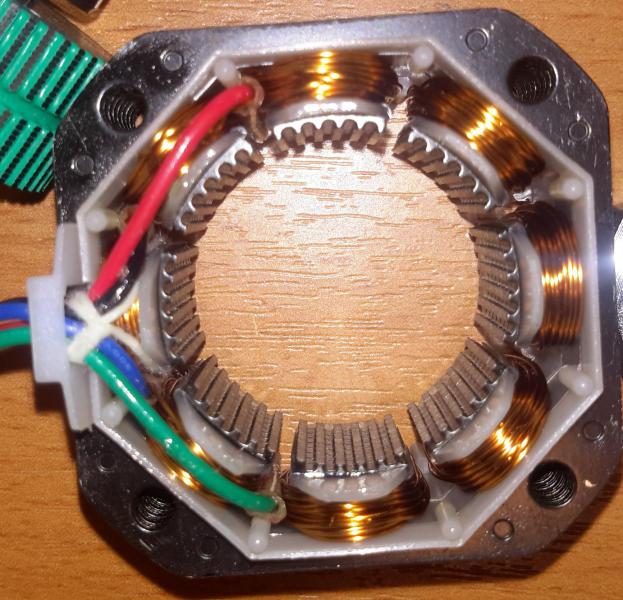 А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.
А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.
Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
- Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.

Недостатки:
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Материалы по теме:
- Какие бывают виды электрических двигателей и чем они отличаются
- Что такое шаговое напряжение и чем оно опасно
- Что такое синхронный двигатель и где он используется
Принцип работы шагового электродвигателя
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения. Применяются в станках с ЧПУ, робототехнике, где требуется дискретные движения, фиксация положения и небольшая скорость. По принципу работы они ближе к двигателям постоянного тока. Конструкция электродвигателей постоянно совершенствуется для уменьшения трудозатрат при изготовлении, повышения КПД и увеличения количество оборотов.
Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения. Применяются в станках с ЧПУ, робототехнике, где требуется дискретные движения, фиксация положения и небольшая скорость. По принципу работы они ближе к двигателям постоянного тока. Конструкция электродвигателей постоянно совершенствуется для уменьшения трудозатрат при изготовлении, повышения КПД и увеличения количество оборотов.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Шаговые двигатели. Принцип работы и управление.
- Шаговый электродвигатель
- Гибридный шаговый двигатель принцип работы
- Шаговый двигатель — принцип работы
- Шаговые двигатели: виды, принцип работы, система управления
- Принцип работы и разновидности биполярного шагового двигателя
- Шаговый двигатель
- Шаговый двигатель
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Тест работы шагового двигателя для балансира
 youtube.com/embed/Vvyeu9BRw9Y» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/Vvyeu9BRw9Y» frameborder=»0″ allowfullscreen=»»/>
Шаговые двигатели. Принцип работы и управление.
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы.
Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название.
Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент.
Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей. Содержание: Как устроен шаговый двигатель Принцип действия Виды и типы по полярности или типу обмоток Типы двигателей по конструкции ротора Управление ШД Достоинства и недостатки шаговых электродвигателей. По своему типу это бесколлекторный синхронный электродвигатель.
В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей. Содержание: Как устроен шаговый двигатель Принцип действия Виды и типы по полярности или типу обмоток Типы двигателей по конструкции ротора Управление ШД Достоинства и недостатки шаговых электродвигателей. По своему типу это бесколлекторный синхронный электродвигатель.
Состоит из статора и ротора. На статоре расположены обмотки, в виде отдельных катушек. Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля.
Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения например, при механических нагрузках на вал. Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. Этот угол и будет шагом поворота ротора. Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В.
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. Этот угол и будет шагом поворота ротора. Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В.
Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения.
При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки. В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. Тем самым обеспечивается вращение ротора. Униполярные электромоторы гораздо более удобны в управлении.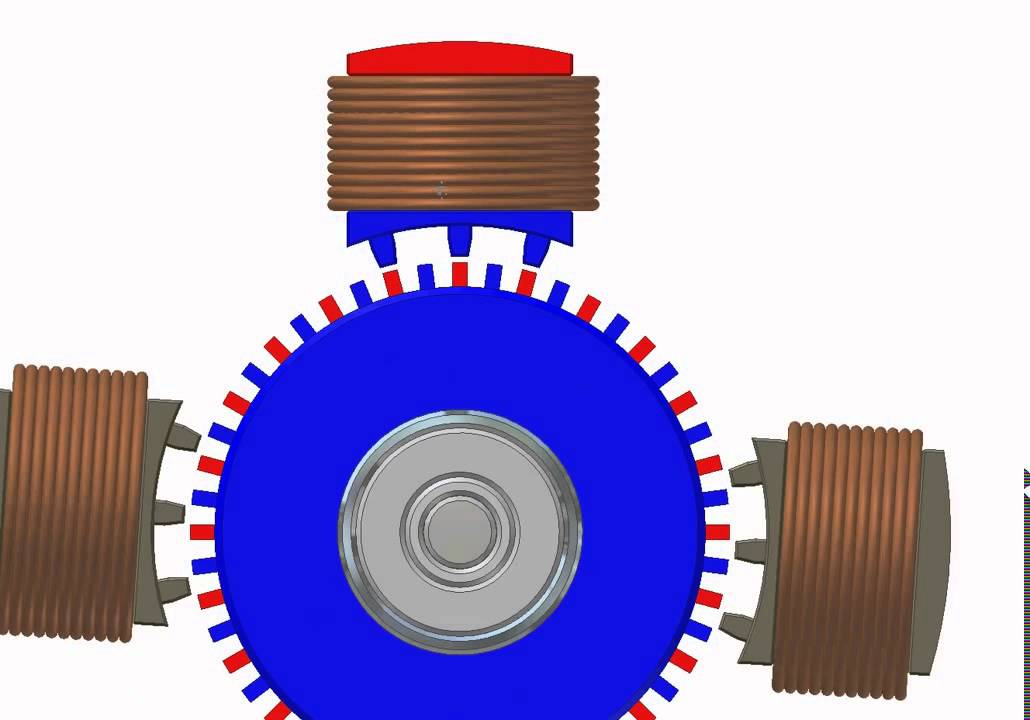 ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске.
ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске.
Количество полюсов в современных моторах доходит до Электромоторы с переменным магнитным сопротивлением. Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело.
В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов.
Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы. Для примера в ШД на шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот.
Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы. Для примера в ШД на шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот.
Благодаря этому у ротора есть полюсов с обратной полярностью. То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме А смещение фаз на четверть дает еще позиций, производится это за счет последовательного возбуждения.
Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах.
Главным конкурентом шагового двигателя является сервопривод , но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Ваш e-mail не будет опубликован. Вы здесь: Главная Электрооборудование Электродвигатели. Автор: Алексей Бартош. Что такое шаговый двигатель, зачем он нужен и как работает. Опубликовано: Добавить комментарий Отменить ответ Ваш e-mail не будет опубликован. Другие статьи по теме Что такое сервопривод и как он работает.
Шаговый электродвигатель
Рабочие органы ряда механизмов при выполнении ими производственных операций должны перемещаться дискретно, шагами. К таким механизмам относятся киносъемочная и проекционная аппаратура, приборы времени, механизмы подач различных станков, устройства перемещения валков прокатных станов и многие другие. Для привода этих рабочих органов целесообразно, очевидно, применять двигатель, способный по своему принципу действия обеспечить подобное дискретное движение. Таким двигателем является шаговый двигатель, ротор которого совершает шаговые перемещения определенной величины с фиксацией положения ротора в конце каждого шага. Широкое распространение шагового электропривода определяется еще и тем обстоятельством, что он хорошо сочетается с цифровыми вычислительными машинами, программными устройствами и различными цифровыми управляющими приборами, которые все шире применяются во многих отраслях техники.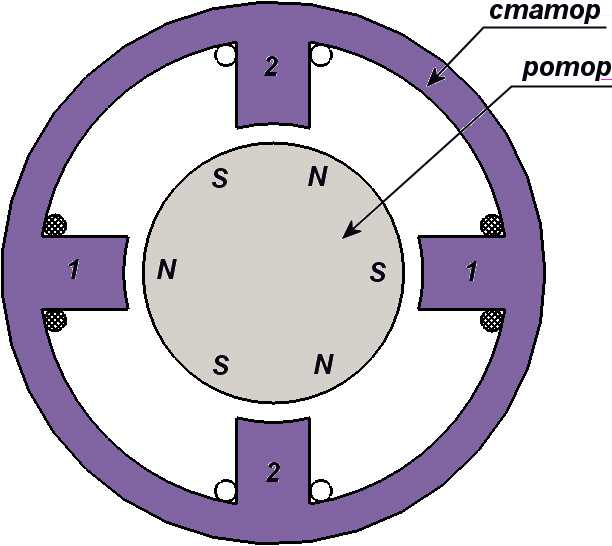
Принцип действия простейшего однофазного шагового двигателя. Двухполюсный ротор из магнитомягкой стали с клювообразными выступами .
Гибридный шаговый двигатель принцип работы
Теория и практика. Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок. Уроки, книги, видео. Профессиональное обучение и развитие. Сайт для электриков и домашних мастеров, а также для всех, кто интересуется электротехникой, электроникой и автоматикой. Категории: Интересные факты , Начинающим электрикам Количество просмотров: Комментарии к статье: 0. Шаговые электродвигатели. Сравнительно недавно термин «шаговый двигатель» был известен только узкому кругу инженеров-электриков. Теперь же шаговые двигатели получили почетное право называться лишь своими «инициалами» — ШД свидетельство широкого распространения электрических машин такого типа.
Шаговый двигатель — принцип работы
Шаговые двигатели широко используются в бытовых приборах, транспортных средствах, фрезерных и шлифовальных станках и других производственных механизмах. Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов это обеспечивается благодаря контроллеру. Главное его отличие от моторов других типов — отсутствие щеточного механизма. Шаговый двигатель оснащен блоком управления приборной панелью , передатчиками и сигнализаторами.
Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов это обеспечивается благодаря контроллеру. Главное его отличие от моторов других типов — отсутствие щеточного механизма. Шаговый двигатель оснащен блоком управления приборной панелью , передатчиками и сигнализаторами.
Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.
Шаговые двигатели: виды, принцип работы, система управления
Шаговый электродвигатель относится к виду электрических машин постоянного тока. Принцип действия шагового электродвигателя основан на способе преобразования импульсной электрической энергии в механическое дискретное перемещение. Шаговые электродвигатели классифицируются как бесколлекторные двигатели с высокой степенью надежности и большим сроком службы. Особенности этого типа электродвигателей делают их пригодными к эксплуатации даже в самых сложных производственных условиях. Отличительной особенностью шаговых двигателей является большое значение крутящего момента на низких скоростях, в то время как в коллекторных двигателях значение крутящего момента возрастает только при увеличении скорости.
Отличительной особенностью шаговых двигателей является большое значение крутящего момента на низких скоростях, в то время как в коллекторных двигателях значение крутящего момента возрастает только при увеличении скорости.
Принцип работы и разновидности биполярного шагового двигателя
Шаговый двигатель — принцип работы Чтобы тот или иной электрический прибор работал, ему требуется специальный приводной механизм. Одним из таких механизмов является шаговый двигатель. В данном материале вы узнаете, что он собой представляет, какой принцип его работы и на какие категории подразделяется. Я постараюсь как можно проще объяснить, как работает шаговый двигатель. Для такой коммутации требуется сложный мостовой драйвер. Примером такого устройства является микросхема LN.
Шаговые электродвигатели Чтобы понять, как работает шаговый двигатель, вспомним принцип действия других электрических машин, например.
Шаговый двигатель
Шаговые двигатели — представляют собой электромеханические устройства, которые способны преобразовывать сигналы внешнего управления в угловое либо же линейное движение ротора электродвигателя с полной его фиксацией в определённом месте нахождения без использования устройств работающих по принципу обратной связи.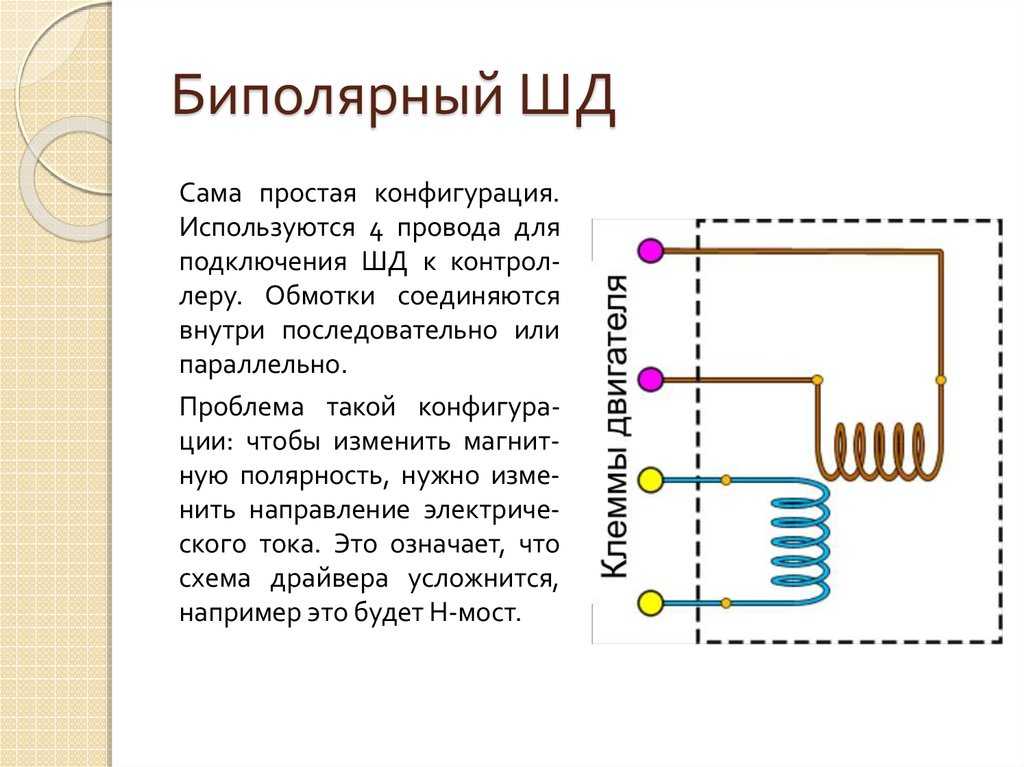 Нынешние шаговые двигатели электродвигатели по сути своей являются обычными синхронными электрическими двигателями без стартовой обмотки, что обычно располагается на роторе движка. Это обуславливается не асинхронным, а частотным запуском шагового двигателя.
Нынешние шаговые двигатели электродвигатели по сути своей являются обычными синхронными электрическими двигателями без стартовой обмотки, что обычно располагается на роторе движка. Это обуславливается не асинхронным, а частотным запуском шагового двигателя.
Шаговый двигатель
ВИДЕО ПО ТЕМЕ: Шаговый Двигатель ( Stepper motor )
Практически все электрические приборы функционируют с помощью приводных механизмов. Они могут иметь различное строение и принцип работы, а также особенности настраивания. Существуют разные типы таких приспособлений. Одним из наиболее востребованных и доступных по цене считается биполярный шаговый двигатель, благодаря которому можно обеспечить реализацию систем точного позиционирования. Существует две разновидности приспособления: униполярный шаговый двигатель и биполярный.
Электропривод, обеспечивающий преобразование числовой информации в дискретные механические положения называется шаговым. Электродвигатель с таким приводом работает от импульсных команд.
Электродвигатель с таким приводом работает от импульсных команд.
Шаговые электродвигатели ШД с электронной схемой управления, называемые дискретным приводом [2], появились в х годах. До этого шаговые электродвигатели применялись в исполнительных устройствах дистанционных передач с механическим коллекторным коммутатором [7]. Развитие электроники и полупроводниковой техники позволило создать малогабаритные и надежные схемы электронных коммутаторов для управления скоростью ШД. Это предопределило применение ШД в автоматическом приводе и системах управления. В настоящей работе рассматриваются исполнительные устройства с синхронными шаговыми электродвигателями. Машины с кинематической связью между ротором и статором имеют существенно меньшие быстродействие и срок службы. Шаговый электродвигатель совместно с коммутатором для управления следует отнести к системам частотного регулирования синхронного электродвигателя с возможностью изменения частоты до нуля.
Для корректной работы сайта необходимо включить поддержку JavaScript. Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования. Двигатели постоянного тока ДПТ с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение.
Шаговые двигатели широко используются в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования. Двигатели постоянного тока ДПТ с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение.
Устройство и принцип действия шагового двигателя — Студопедия
Поделись
Принцип действия. Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых питание фаз обмотки якоря осуществляется путем подачи импульсов напряжения от какого-либо (например, электронного) коммутатора. Под воздействием каждого такого импульса ротор двигателя совершает определенное угловое перемещение, называемоешагом. Коммутатор преобразует заданную последовательность управляющих импульсов в т-фазную систему одно- или двухполярных прямоугольных импульсов напряжения;
Рис. 7.15. Схемы работы шагового двигателя при питании различных фаз обмотки якоря 7.15. Схемы работы шагового двигателя при питании различных фаз обмотки якоря
|
На рис. 7.15 изображена схема m-фазного шагового двигателя без обмотки возбуждения на роторе. Если фазы 1, 2, 3,…,m обмотки якоря рассматриваемого двигателя питаются поочередно однополярными импульсами напряжения, то ротор двигателя скачкообразно перемещается в положения, при которых его ось совпадает с осями фаз 1,2, 3 и т. п. Следовательно, ротор имеетm устойчивых состояний, соответствующих направлению вектора МДС F→1 (рис. 7.15, а) обмотки якоря в данный момент времени; при этом шаг ротора равен 2π/m.
Для увеличения результирующей МДС якоря, а следовательно, магнитного потока и синхронизирующего момента обычно одновременно подают питание на две, три и большее количество фаз. Так, например, если одновременно подают питание на две фазы, то положение результирующего вектора МДС F→peз и оси ротора совпадает с линией, проходящей между осями двух соседних фаз (рис. 7.15,б). При подаче питания одновременно на три соседние фазы ротор перемещается в положение, совпадающее с осью средней фазы (рис. 7.15, в). Если поочередно включают то четное (две), то нечетное (одна, три) число фаз, то ротор двигателя имеет 2mустойчивых состояния и шаг равен π/m. Управление двигателем, при котором фазы обмотки якоря включают поочередно равными группами по две, три и т, п., называют симметричным; поочередное включение неравных групп фаз — несимметричным.
7.15,б). При подаче питания одновременно на три соседние фазы ротор перемещается в положение, совпадающее с осью средней фазы (рис. 7.15, в). Если поочередно включают то четное (две), то нечетное (одна, три) число фаз, то ротор двигателя имеет 2mустойчивых состояния и шаг равен π/m. Управление двигателем, при котором фазы обмотки якоря включают поочередно равными группами по две, три и т, п., называют симметричным; поочередное включение неравных групп фаз — несимметричным.
В качестве шаговых обычно применяют синхронные двигатели без обмотки возбуждения на роторе: с постоянными магнитами, реактивные и индукторные (с подмагничиванием). Для получения требуемых статических характеристик и динамических свойств их выполняют без пусковой обмотки, с ротором минимального диаметра и рассчитывают на большие электромагнитные нагрузки.
| Рис. 7.16. Положения ротора шагового двигателя с постоянными магнитами при различных полярностях включения его фаз и диаграмма изменения тока в этих фазах |
Применение шагового двигателя целесообразно для привода механизмов, имеющих старт-стопное движение, или механизмов с непрерывным движением, если управляющий сигнал задан в виде последовательности импульсов (лентопротяжных устройств для ввода и вывода информации, счетчиков, приводов станков с программным управлением и т. п.).
п.).
Двигатели с постоянными магнитами. Ротор двигателя (рис. 7.16) выполняют в виде постоянного магнита (звездочки) литой или составной конструкции без полюсных наконечников. Статор имеет явно выраженные полюсы, вокруг которых в полузакрытых пазах размещаются катушки обмотки якоря (двух-, трех- или четырехфазной). В многополюсных машинах число пазов на полюс и фазу q = 1, т. е. обмотку выполняют сосредоточенной. Шаговые двигатели этого типа называют также магнитоэлектрическими.
В двигателе с двухфазной обмоткой якоря при последо-вательной подаче импульсов напряжения на катушки полюсов ось магнитного потока скачкообразно перемещается на 90° (рис. 7.16, а, б, в). В результате под действием синхронизирующего момента при каждом импульсе ротор поворачивается на 90°, т.е. делает шаг, равный 90°. Возникновение синхронизирующего момента в шаговом двигателе при подаче питания на фазы обмотки якоря обусловлено теми же причинами, что и в синхронном двигателе обычного исполнения. В рассматриваемом двигателе магнитное поле якоря может иметь четыре различных состояния, которым соответствуют различные направления тока в фазах 1 и 2 его обмотки:
В рассматриваемом двигателе магнитное поле якоря может иметь четыре различных состояния, которым соответствуют различные направления тока в фазах 1 и 2 его обмотки:
1. ток в фазе 1 направлен от начала к концу; фаза 2 обесточена;
2. ток в фазе 2 направлен от начала к концу; фаза 1 обесточена;
3. ток в фазе 1 направлен от конца к началу; фаза 2 обесточена;
4. ток в фазе 2 направлен от конца к началу; фаза 1 обесточена.
Порядок переключения (коммутации) фаз 1 и 2 обмотки якоря представлен на рис. 7.16, г в виде временной диаграммы; изменения токов Iв1 и Iв2 в этих фазах. Каждому импульсу тока соответствует определенное положение ротора двигателя. Рассмотренную систему переключения фаз 1 и 2 обмотки якоря называют четырехтактной разнополярной коммутацией и сокращенно обозначают следующим образом: (+1)-(+2)-(-1)-(-2)-(+1) — …. Каждым четырем тактам соответствует поворот ротора на два полюсных деления. Чтобы изменить направление вращения ротора, следует изменить полярность включения одной из фаз обмотки якоря, не изменяя очередность их коммутации. Для уменьшения шага шаговые двигатели обычно выполняют многополюсными. При этом число полюсных выступов на роторе должно быть равно числу полюсов статора. Наиболее часто используют восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
Чтобы изменить направление вращения ротора, следует изменить полярность включения одной из фаз обмотки якоря, не изменяя очередность их коммутации. Для уменьшения шага шаговые двигатели обычно выполняют многополюсными. При этом число полюсных выступов на роторе должно быть равно числу полюсов статора. Наиболее часто используют восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
(7.15)
αш = 360/(kp),
где k — число тактов в одном цикле; р — число пар полюсов. При четырехтактной коммутации шаг восьмиполюсного двигателя αш = 22,5°. Частота вращения ротора двигателя зависит от частоты подачи импульсов:
(7.16)
n2 = 60f1αш /360 = 60f1 /(kp).
Диапазон изменения частоты при четырехтактной коммутации обычно составляет 0 — 500 Гц; максимальной частоте соответствует частота вращения n2 max = 2000 ÷ 3000 об/мин. В ряде случаев для лучшего использования обмоток применяют четырехтактную коммутацию с попарным включением обмоток: (+1)(+2)-(+2)(-1)-(-1)(-2)-(-2)(+1)-(+1)(+ 2) — …. Такое включение обмоток позволяет увеличить результирующую МДС ротора, вследствие чего возрастает вращающий момент на валу двигателя примерно в полтора раза.
В ряде случаев для лучшего использования обмоток применяют четырехтактную коммутацию с попарным включением обмоток: (+1)(+2)-(+2)(-1)-(-1)(-2)-(-2)(+1)-(+1)(+ 2) — …. Такое включение обмоток позволяет увеличить результирующую МДС ротора, вследствие чего возрастает вращающий момент на валу двигателя примерно в полтора раза.
Обычно шаговые двигатели имеют четырехфазную обмотку, которая в отличие от двухфазной может управляться однополярными импульсами напряжения; это упрощает конструкцию электронного коммутатора. При подключении к электронному коммутатору фазы такой обмотки соединяют в четырехлучевую звезду с выведенной общей точкой. Коммутацию четырехфазной обмотки обычно выполняют четырехтактной, парной: (12)-(23)-(34)-(41)-(12)- …, вследствие чего обеспечивается такое же увеличение вращающего момента, что и при попарной разнополярлой коммутации двухфазной обмотки. Шаговые двигатели с трехфазной обмоткой требуют шеститактнойразнополярной коммутации.
Реактивные двигатели. Ротор реактивного шагового двигателя выполняют из магнитномягкого материала. На статоре обычно располагают трехфазную сосредоточенную обмотку якоря, фазы которой получают питание от электронного коммутатора. Шаговые двигатели этого типа называют также параметрическими. На рис. 7.17, а, б и в схематично показаны три такта работы реактивного шагового двигателя с трехфазной обмоткой якоря и шестью выступами на статоре; на роторе имеются только два выступа. Когда по фазе 1 проходит ток, ротор занимает положение, показанное на рис. 7.17, а. В следующий момент времени питание подается одновременно на фазы 1 и 2, и ротор поворачивается в положение (рис. 7.17,б), соответствующее наибольшей магнитной проводимости для потока, созданного этими фазами. Далее питание с фазы 1 снимается и ротор перемещается в положение рис. 7.17, в. Таким образом, коммутация обмоток
Ротор реактивного шагового двигателя выполняют из магнитномягкого материала. На статоре обычно располагают трехфазную сосредоточенную обмотку якоря, фазы которой получают питание от электронного коммутатора. Шаговые двигатели этого типа называют также параметрическими. На рис. 7.17, а, б и в схематично показаны три такта работы реактивного шагового двигателя с трехфазной обмоткой якоря и шестью выступами на статоре; на роторе имеются только два выступа. Когда по фазе 1 проходит ток, ротор занимает положение, показанное на рис. 7.17, а. В следующий момент времени питание подается одновременно на фазы 1 и 2, и ротор поворачивается в положение (рис. 7.17,б), соответствующее наибольшей магнитной проводимости для потока, созданного этими фазами. Далее питание с фазы 1 снимается и ротор перемещается в положение рис. 7.17, в. Таким образом, коммутация обмоток
| Рис. 7.17. Положения (ротора реактивного шагового двигателя при различных полярностях включения фаз и диаграмма изменения тока в этих фазах |
статора происходит в следующем порядке:. (1) — (12) — (2) — (23) — (3) — (31) — (1)…, т. е. коммутация является несимметричной, шеститактной, однополярной (рис. 7.17, г). При этом шаг двигателя αш = 30°. Возможна и трехтактнаякоммутация но схеме: (1) — (2) — (3) — (1) или (12) — (23) — (31) — (12)…. Как правило, применяют шеститактную коммутацию, которая дает меньший шаг и большую устойчивость работы двигателя.
(1) — (12) — (2) — (23) — (3) — (31) — (1)…, т. е. коммутация является несимметричной, шеститактной, однополярной (рис. 7.17, г). При этом шаг двигателя αш = 30°. Возможна и трехтактнаякоммутация но схеме: (1) — (2) — (3) — (1) или (12) — (23) — (31) — (12)…. Как правило, применяют шеститактную коммутацию, которая дает меньший шаг и большую устойчивость работы двигателя.
Шаг двигателя можно уменьшить, увеличив число выступов на роторе. Например, применяя шаговый двигатель с крестообразным ротором, при той же последовательности подачи импульсов, что и для двигателя, показанного на рис. 7.17, получают шаг, равный 15°. Дальнейшее уменьшение шага, т. е. повышение точности работы двигателя, можно обеспечить, увеличив число выступов на статоре и роторе, т. е, перейдя к схеме редукторного двигателя (см. рис. 7.11).
При малом шаге (5 — 1°) применяют реактивный редукторный шаговый двигатель с гребенчатыми выступами на статоре. Выпускаемые отечественной промышленностью реактивные редукторные шаговые двигатели имеют на статоре шесть полюсных выступов с гребенчатой зубцовой зоной.
Двигатели с подмагничиванием (индукторные). По конструктивному исполнению и принципу работы рассматриваемые двигатели сходны с редукторными двигателями, имеющими радиальное возбуждение. Возбуждение может создаваться обмоткой постоянного тока или постоянным магнитом, находящимся на статоре, как и в редукторных двигателях. Однако в шаговых индукторных двигателях постоянная составляющая магнитного поля обычно образуется за счет особого способа включения обмоток якоря. Например, если питать фазы обмотки якоря однополярными импульсами, то за счет постоянной составляющей тока в машине возникает неподвижное в пространстве магнитное поле, намагничивающее ротор. Следовательно, при соответствующей схеме питания обмоток возбуждения реактивный шаговый двигатель может работать как двигатель с подмагничиванием.
Индукторные шаговые двигатели с подмагничиванием имеют несколько лучшие характеристики, чем реактивные — больший электромагнитный момент, лучшую устойчивость и т. п. Однако для них требуется более сложный электронный коммутатор, который загружается постоянной составляющей тока возбуждения. Наличие постоянной составляющей тока в обмотке якоря двигателя приводит к возрастанию электрических потерь мощности. Максимальная частота подачи управляющих импульсов тока у двигателей с подмагничиванием меньшая, чем у реактивных.
п. Однако для них требуется более сложный электронный коммутатор, который загружается постоянной составляющей тока возбуждения. Наличие постоянной составляющей тока в обмотке якоря двигателя приводит к возрастанию электрических потерь мощности. Максимальная частота подачи управляющих импульсов тока у двигателей с подмагничиванием меньшая, чем у реактивных.
| Рис. 7.18. Рабочие характеристики шагового двигателя |
Режимы работы шаговых двигателей. Для работы шагового двигателя характерным является регулирование частоты вра-щения в широком диапазоне путем изменения частоты подачи управляющих импульсов тока. Таким же способом осуществляют его фиксированный останов, пуск и изменение направления вращения. В зависимости от частоты управляющих импульсов различают следующие режимы работы шаговых двигателей: статический, квазистационарный, установившийся и переходные.
Статический режим — это режим прохождения по обмоткам возбуждения постоянного тока, создающего неподвижное поле. При питании одной фазы зависимость электромагнитного момента М от угла рассогласования θ близка к синусоидальной (рис. 7.18, а). Поскольку при θ = 0 синхронизирующий момент равен нулю, возникает статическая ошибка в положении ротора; она тем больше, чем больше нагрузка и меньше максимальный момент. В двигателях с гребенчатыми выступами на статоре и шагом, равным 1,5°, статическая ошибка составляет не более 0,5°.
При питании одной фазы зависимость электромагнитного момента М от угла рассогласования θ близка к синусоидальной (рис. 7.18, а). Поскольку при θ = 0 синхронизирующий момент равен нулю, возникает статическая ошибка в положении ротора; она тем больше, чем больше нагрузка и меньше максимальный момент. В двигателях с гребенчатыми выступами на статоре и шагом, равным 1,5°, статическая ошибка составляет не более 0,5°.
Квазистационарный режим — это режим отработки единичных шагов, например в приводах различных стартстопных, лентопротяжных и других подобных механизмов. Предельная частота квазистационарного режима ограничена временем затухания колебаний ротора, которые могут возникнуть при переходе ротора из одного устойчивого положения в другое (точки О и О’ на рис. 7.18, а), аналогично тому, как это происходит в обычной синхронной машине при резком изменении угла θ. Для устранения колебаний ротора в конце шага применяют различные демпфирующие устройства и обгонные муфты. Предельную частоту квазистационарного режима повышают, увеличивая число фаз обмотки якоря или число тактов коммутации (восьмитактная коммутация при четырехфазной обмотке, шеститактная — при трехфазной). Во всех этих случаях при отработке шага уменьшается угол перемещения и кинетическая энергия ротора, что снижает его склонность к колебаниям.
Во всех этих случаях при отработке шага уменьшается угол перемещения и кинетическая энергия ротора, что снижает его склонность к колебаниям.
Установившийся резким — это режим, соответствующий постоянной частоте управляющих импульсов. Ротор двигателя в установившемся режиме имеет постоянную частоту вращения, но при переходе из одного устойчивого состояния в другое возникают периодические и апериодические колебания относительно мгновенной точки устойчивого равновесия. При частоте управляющих импульсов f1, меньшей частоты свободных колебаний двигателя f0, угловое перемещение ротора при каждом шаге, как и квазистационарном режиме, сопровождается свободными колебаниями, которые существенно увеличивают динамическую ошибку при отработке ротором заданного перемещения. Частота свободных колебаний ротора
(7.17)
f0 ≈ 0,135√Mmax p /(Jр + Jн ),
где Mmax — максимальный электромагнитный момент при неподвижном роторе; Jp и Jн — моменты инерции ротора и нагрузки, приведенной к валу ротора.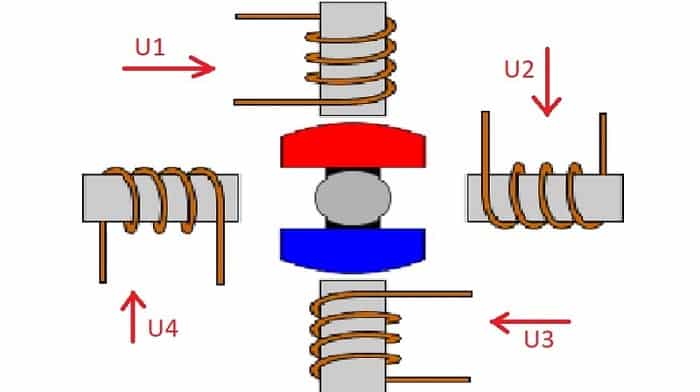 При частоте управляющих импульсов, равной или в целое число раз меньшей частоты f0, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может вызвать нарушение периодичности движения ротора и привести к выпадению его из синхронизма. При частоте f1 > f0возникают вынужденные колебания с частотой, равной частоте управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты. Для устойчивой работы шагового двигателя необходимо, чтобы Мн /Mmax ≤ 0,3 ÷ 0,5, Jн /Jp ≤ l ÷ 2 и имелось внутреннее или внешнее; демпфирование. Электромагнитный момент шагового двигателя в общем случае состоит из двух частей: синхронизирующего момента, зависящего от угла θ между осями МДС обмотки якоря и ротора, и асинхронного тормозного момента, пропорционального частоте вращения, т. е. dθ/dt:
При частоте управляющих импульсов, равной или в целое число раз меньшей частоты f0, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может вызвать нарушение периодичности движения ротора и привести к выпадению его из синхронизма. При частоте f1 > f0возникают вынужденные колебания с частотой, равной частоте управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты. Для устойчивой работы шагового двигателя необходимо, чтобы Мн /Mmax ≤ 0,3 ÷ 0,5, Jн /Jp ≤ l ÷ 2 и имелось внутреннее или внешнее; демпфирование. Электромагнитный момент шагового двигателя в общем случае состоит из двух частей: синхронизирующего момента, зависящего от угла θ между осями МДС обмотки якоря и ротора, и асинхронного тормозного момента, пропорционального частоте вращения, т. е. dθ/dt:
(7.18)
М = Мсн + Мт = Mmax sin θ + Ddθ/dt.
Параметр D называют коэффициентом внутреннего демпфирования. Физически внутреннее демпфирование, т. е. тормозной момент Мт в двигателях с постоянными магнитами или обмоткой возбуждения на роторе, возникает в результате взаимодействия, вращающегося потока ротора с током в обмотке якоря (см. § 7.2). У реактивных двигателей этот момент зависит от разности индуктивных сопротивлений (Хd — Xq) обмотки якоря и ее активного сопротивления Ra .При достаточно большом значении коэффициента D происходит эффективное затухание колебаний ротора двигателя. Этому способствует также наличие трения и внешних демпфирующих устройств.
Переходные режимы — основные эксплуатационные режимы шаговых двигателей, включающие в себя пуск, торможение, реверс, переход с одной частоты на другую. Основным требованием, предъявляемым к шаговым двигателям в переходных режимах, является сохранение синхронизма при изменении частоты управляющих импульсов — отсутствие потери шага.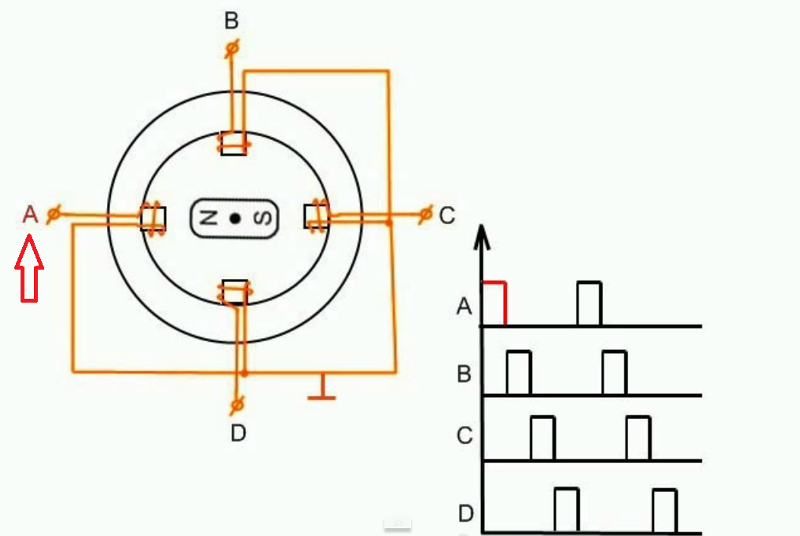
Для каждого шагового двигателя существует некоторая предельная частота подачи управляющих импульсов fпр , при которой ротор еще следует за скачкообразно изменяющимся полем статора. Эту частоту называют частотой приемистости. Частота приемистости характеризует пусковые свойства шагового двигателя — максимальную частоту управляющих импульсов, при которой возможен пуск без выпадения из синхронизма. Она возрастает с увеличением синхронизирующего момента, уменьшением углового шага, нагрузки и момента инерции.
Для современных шаговых двигателей при номинальной нагрузке частота приемистости fпр =100 ÷ 1000 Гц. Предельная частота, при которой осуществляется торможение шагового двигателя без потери шага (с сохранением синхронизма), как правило, выше частоты приемистости: это объясняется влиянием внутреннего демпфирования, момента нагрузки и момента трения. Предельная частота реверса, при которой реализуется реверс без выпадения из синхронизма (без потери шага) составляет (0,2 ÷ 0,5)fпр . Только в двигателях с большим демпфированием и электромагнитными постоянными времени обмоток якоря предельные частоты реверса и приемистости примерно равны.
Только в двигателях с большим демпфированием и электромагнитными постоянными времени обмоток якоря предельные частоты реверса и приемистости примерно равны.
Рабочие характеристики шаговых двигателей. Они определяются параметрами двигателя, нагрузки (нагрузочный момент и момент инерции) и особенностями электронного коммутатора (числом тактов коммутации, формой его выходного напряжения и пр.). Основными характеристиками являются: статическая, предельная механическая и предельная динамическая характеристики приемистости.
Статическая характеристика — это зависимость электромагнитного момента М от угла θ (рис. 7.18, а), а также зависимость тока двигателя от нагрузки в квазистационарном режиме.
Предельная механическая характеристика — это зависимость частоты управляющих импульсов от максимального момента на валу ротора, при котором происходит выпадение двигателя из синхронизма (рис. 7.18,б, кривая 1). Ее снимают при плавном увеличении частотыf1.
Предельная динамическая характеристика приемистости — это зависимость частоты приемистости fпр в динамическом режиме (например, при пуске) от момента нагрузки М (рис. 7.18,б, кривая 2). Рабочие характеристики снимают при различных сочетаниях включаемых обмоток, моментах инерции двигателя и нагрузки и пр.
Области применения. При высоких частотах вращения (2000—3000 об/мин) применяют шаговые двигатели с постоянными магнитами на роторе. Наличие активного ротора позволяет получить относительно большие моменты и обеспечить фиксацию ротора при обесточенных обмотках. У этих двигателей номинальный вращающий момент Мном = 0,1 ÷ 10 Н•см, угловой шагαш = 15°. При низких частотах вращения (до 1000 об/мин) и малом шаге применяют индукторные и реактивные двигатели с гребенчатыми выступами на полюсах статора. Их номинальный момент Мном = 1 ÷ 25 Н•см, а угловой шаг αш = 1,5 ÷ 3°.
Что такое шаговый двигатель и как он работает
От простого DVD-плеера или принтера в вашем доме до сложнейшего станка с ЧПУ или манипулятора — шаговые двигатели можно найти практически везде. Его способность совершать точные движения с электронным управлением позволила этим двигателям найти применение во многих кошачьих, таких как камеры наблюдения, жесткие диски, станки с ЧПУ, 3D-принтеры, робототехника, сборочные роботы, лазерные резаки и многое другое. В этой статье давайте узнаем, что делает эти двигатели особенными, и теорию, стоящую за этим. Мы научимся использовать одно для вас приложение.
Знакомство с шаговыми двигателями
Как и все двигатели, шаговые двигатели также имеют статор и ротор , но, в отличие от обычного двигателя постоянного тока, статор состоит из отдельных наборов катушек. Количество катушек будет различаться в зависимости от типа шагового двигателя , но пока просто поймите, что в шаговом двигателе ротор состоит из металлических полюсов, и каждый полюс будет притягиваться набором катушек в статоре. На приведенной ниже схеме показан шаговый двигатель с 8 полюсами статора и 6 полюсами ротора.
На приведенной ниже схеме показан шаговый двигатель с 8 полюсами статора и 6 полюсами ротора.
Если вы посмотрите на катушки на статоре, они расположены парами катушек, например, A и A’ образуют пару B, а B’ образуют пару и так далее. Таким образом, каждая из этой пары катушек образует электромагнит, и они могут быть запитаны индивидуально с помощью схемы драйвера. Когда на катушку подается питание, она действует как магнит, и полюс ротора выравнивается с ним, когда ротор вращается, чтобы выровняться со статором, это называется одним шагом . Точно так же, подавая питание на катушки в последовательности, мы можем вращать двигатель небольшими шагами, чтобы сделать полный оборот.
Типы шаговых двигателей
Существует три основных типа шаговых двигателей в зависимости от конструкции:
- Шаговый двигатель с переменным сопротивлением: обеспечить движение за счет минимального сопротивления между статором и ротором.
- Шаговый двигатель с постоянными магнитами: У них есть ротор с постоянными магнитами, и они отталкиваются или притягиваются к статору в зависимости от приложенных импульсов.
- Гибридный синхронный шаговый двигатель: Они представляют собой комбинацию шагового двигателя с переменным сопротивлением и постоянного магнита.

Помимо этого, мы также можем классифицировать шаговые двигатели как униполярные и биполярные в зависимости от типа обмотки статора.
- Биполярный шаговый двигатель: Катушки статора на двигателях этого типа не имеют общего провода. Управление этим типом шагового двигателя отличается и является сложным, а схема управления не может быть легко спроектирована без микроконтроллера.
- Униполярный шаговый двигатель: В этом типе шагового двигателя мы можем использовать центральное отвод обеих фазных обмоток для общего заземления или для общего питания, как показано ниже. Это упрощает управление двигателями, существует множество типов униполярных шаговых двигателей
 Это упрощает управление двигателями, существует множество типов униполярных шаговых двигателей
Это упрощает управление двигателями, существует множество типов униполярных шаговых двигателей.
Режимы работы шагового двигателя
Поскольку статор шагового двигателя состоит из разных пар катушек, каждая пара катушек может возбуждаться разными способами, что позволяет управлять режимами множество различных режимов. Ниже приведены общие классификации
Полношаговый режим
В полношаговом режиме возбуждения мы можем достичь полного вращения на 360° с минимальным количеством оборотов (шагов). Но это приводит к меньшей инерции и к тому же вращение не будет плавным. В полношаговом возбуждении есть еще две классификации: , однофазное волновое пошаговое и двухфазное возбуждение .
1. Однофазное пошаговое или волновое пошаговое: В этом режиме в любой момент времени будет под напряжением только одна клемма (фаза) двигателя. Это имеет меньшее количество шагов и, следовательно, может достигать полного вращения на 360 °. Поскольку количество шагов меньше, ток, потребляемый этим методом, также очень низок. В следующей таблице показана пошаговая последовательность волн для 4-фазного шагового двигателя 9.0003
Поскольку количество шагов меньше, ток, потребляемый этим методом, также очень низок. В следующей таблице показана пошаговая последовательность волн для 4-фазного шагового двигателя 9.0003
| Шаг | Фаза 1 | Фаза 2 | Фаза 3 | Фаза 4 |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
2. Двухэтапное пошаговое выполнение: Как следует из названия этого метода, две фазы будут одной. Он имеет то же количество шагов, что и волновой степпинг, но поскольку две катушки активируются одновременно, он может обеспечить лучший крутящий момент и скорость по сравнению с предыдущим методом. Хотя один недостаток заключается в том, что этот метод также потребляет больше энергии.
Хотя один недостаток заключается в том, что этот метод также потребляет больше энергии.
| Шаг | Фаза 1 | Фаза 2 | Фаза 3 | Фаза 4 |
1 | 1 | 1 | 0 | 0 |
2 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 | 1 |
Полушаговый режим
Полушаговый режим представляет собой комбинацию однофазного и двухфазного режимов. Эта комбинация поможет нам преодолеть вышеупомянутый недостаток обоих режимов.
Как вы могли догадаться, поскольку мы комбинируем оба метода, нам нужно будет выполнить 8 шагов в этом методе, чтобы получить полный поворот. Последовательность переключения для 4-фазного шагового двигателя показана ниже
Последовательность переключения для 4-фазного шагового двигателя показана ниже
Шаг | Фаза 1 | Этап 2 | Этап 3 | Этап 4 |
1 | 1 | 0 | 0 | 0 |
2 | 1 | 1 | 0 | 0 |
3 | 0 | 1 | 0 | 0 |
4 | 0 | 1 | 1 | 0 |
5 | 0 | 0 | 1 | 1 |
6 | 0 | 0 | 0 | 1 |
7 | 1 | 0 | 0 | 1 |
8 | 1 | 0 | 0 | 0 |
Микрошаговый режим
Микрошаговый режим является сложным, но он обеспечивает очень хорошую точность наряду с хорошим крутящим моментом и плавной работой. В этом методе катушка будет возбуждаться двумя синусоидальными волнами, отстоящими друг от друга на 90°. Таким образом, мы можем контролировать как направление, так и амплитуду тока, протекающего через катушку, что помогает нам увеличить количество шагов, которые двигатель должен сделать за один полный оборот. Микрошаг может выполнять до 256 шагов за один полный оборот, что позволяет двигателю вращаться быстрее и плавнее.
В этом методе катушка будет возбуждаться двумя синусоидальными волнами, отстоящими друг от друга на 90°. Таким образом, мы можем контролировать как направление, так и амплитуду тока, протекающего через катушку, что помогает нам увеличить количество шагов, которые двигатель должен сделать за один полный оборот. Микрошаг может выполнять до 256 шагов за один полный оборот, что позволяет двигателю вращаться быстрее и плавнее.
Как использовать шаговый двигатель
Достаточно скучной теории, давайте предположим, что кто-то дал вам шаговый двигатель, скажем, знаменитый 28-BYJ48, и вам очень интересно, как заставить его работать. К этому времени вы должны были понять, что невозможно заставить эти двигатели вращаться, просто питая их от источника питания, так как бы вы это сделали?
Давайте посмотрим на этот 28-BYJ48 Шаговый двигатель .
Итак, в отличие от обычного двигателя постоянного тока, из него выходит пять проводов всех причудливых цветов, и почему это так? Чтобы понять это, мы должны сначала узнать, как работает степпер, который мы уже обсуждали. Прежде всего, шаговые двигатели не вращают , они шагают, поэтому они также известны как шаговые двигатели . Это означает, что они будут двигаться только на один шаг за раз. Эти двигатели имеют последовательность катушек, присутствующих в них, и эти катушки должны быть запитаны определенным образом, чтобы заставить двигатель вращаться. Когда каждая катушка находится под напряжением, двигатель совершает шаг, а последовательность подачи питания заставит двигатель совершать непрерывные шаги, заставляя его вращаться. Давайте посмотрим на катушки, присутствующие внутри двигателя, чтобы точно знать, откуда берутся эти провода.
Прежде всего, шаговые двигатели не вращают , они шагают, поэтому они также известны как шаговые двигатели . Это означает, что они будут двигаться только на один шаг за раз. Эти двигатели имеют последовательность катушек, присутствующих в них, и эти катушки должны быть запитаны определенным образом, чтобы заставить двигатель вращаться. Когда каждая катушка находится под напряжением, двигатель совершает шаг, а последовательность подачи питания заставит двигатель совершать непрерывные шаги, заставляя его вращаться. Давайте посмотрим на катушки, присутствующие внутри двигателя, чтобы точно знать, откуда берутся эти провода.
Как вы можете видеть, двигатель имеет униполярную 5-проводную катушку . Есть четыре катушки, которые должны быть запитаны в определенной последовательности. На красные провода подается напряжение +5 В, а остальные четыре провода подключаются к земле для срабатывания соответствующей катушки.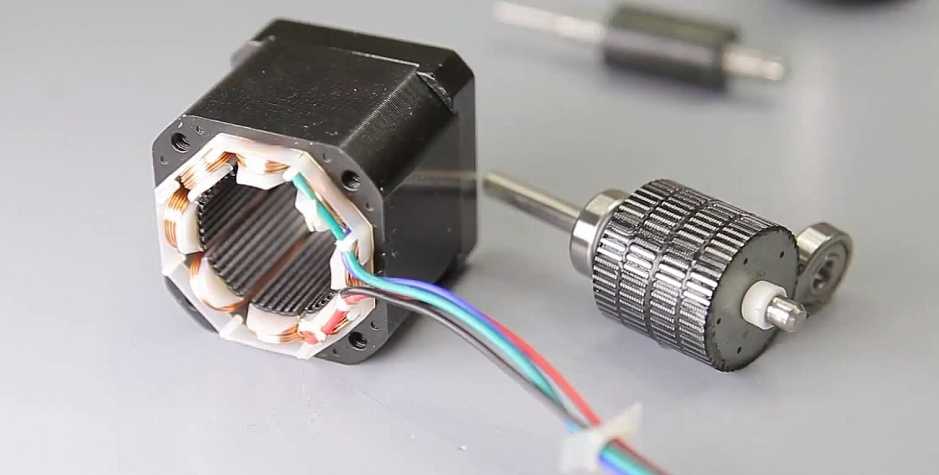 Мы используем любой микроконтроллер, чтобы подавать питание на эти катушки в определенной последовательности и заставлять двигатель выполнять необходимое количество шагов. Опять же, есть много последовательностей, которые вы можете использовать, обычно это 9.0507 используется 4-ступенчатый регулятор , а для более точного управления также может использоваться 8-ступенчатый регулятор . Таблица последовательности для 4-ступенчатого управления показана ниже.
Мы используем любой микроконтроллер, чтобы подавать питание на эти катушки в определенной последовательности и заставлять двигатель выполнять необходимое количество шагов. Опять же, есть много последовательностей, которые вы можете использовать, обычно это 9.0507 используется 4-ступенчатый регулятор , а для более точного управления также может использоваться 8-ступенчатый регулятор . Таблица последовательности для 4-ступенчатого управления показана ниже.
Шаг | Катушка под напряжением |
Шаг 1 | А и В |
Шаг 2 | В и С |
Шаг 3 | С и D |
Шаг 4 | Д и А |
Итак, почему этот двигатель называется 28-BYJ48 ? Серьезно!!! Я не знаю.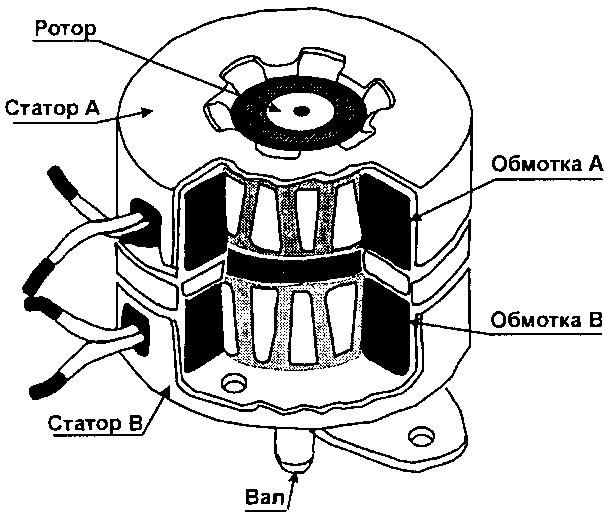 Нет никаких технических причин для того, чтобы этот двигатель был назван так; возможно, нам не следует погружаться в это намного глубже. Давайте посмотрим на некоторые важные технические данные, полученные из таблицы данных этого двигателя на рисунке ниже.
Нет никаких технических причин для того, чтобы этот двигатель был назван так; возможно, нам не следует погружаться в это намного глубже. Давайте посмотрим на некоторые важные технические данные, полученные из таблицы данных этого двигателя на рисунке ниже.
Это много информации, но нам нужно рассмотреть несколько важных, чтобы знать, какой тип шагового двигателя мы используем, чтобы мы могли его эффективно запрограммировать. Во-первых, мы знаем, что это шаговый двигатель на 5 В, так как мы запитываем красный провод напряжением 5 В. Затем мы также знаем, что это четырехфазный шаговый двигатель, поскольку в нем было четыре катушки. Теперь передаточное число составляет 1:64. Это означает, что вал, который вы видите снаружи, совершит один полный оборот, только если двигатель внутри повернется 64 раза. Это связано с тем, что шестерни, соединенные между двигателем и выходным валом, помогают увеличить крутящий момент.
Еще одна важная информация, на которую следует обратить внимание, — это угол шага : 5,625°/64. Это означает, что двигатель, работающий в 8-ступенчатой последовательности, будет перемещаться на 5,625 градуса на каждый шаг, и для завершения одного полного оборота потребуется 64 шага (5,625*64=360).
Это означает, что двигатель, работающий в 8-ступенчатой последовательности, будет перемещаться на 5,625 градуса на каждый шаг, и для завершения одного полного оборота потребуется 64 шага (5,625*64=360).
Расчет количества шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов на оборот для вашего шагового двигателя, потому что только тогда вы сможете эффективно программировать/управлять им.
Предположим, что мы будем управлять двигателем в 4-шаговой последовательности, поэтому угол шага будет 11,25°, так как он равен 5,625° (указано в техническом описании) для 8-шаговой последовательности, он будет равен 11,25° (5,625*2=11,25) .
шагов на оборот = 360/угол шага Здесь 360/11,25 = 32 шага на оборот.
Зачем нужны модули драйверов для шаговых двигателей?
Большинство шаговых двигателей будут работать только с помощью модуля драйвера.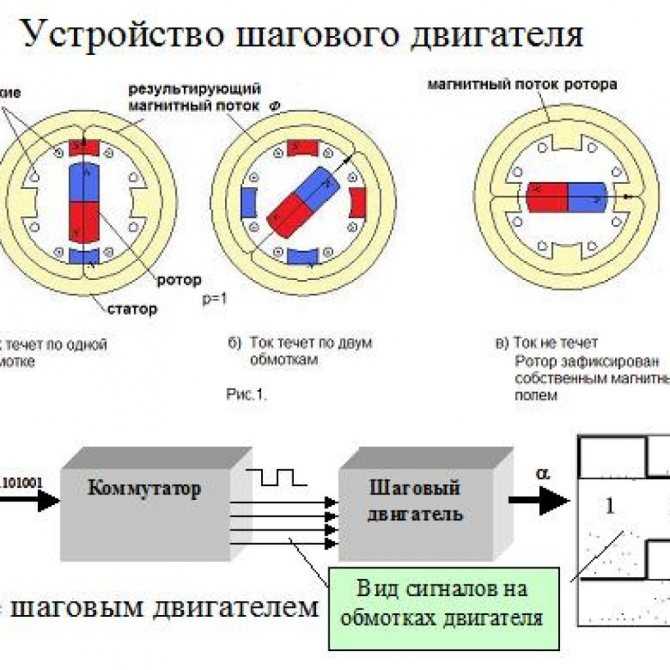 Это связано с тем, что модуль контроллера (микроконтроллер/цифровая схема) не сможет обеспечить достаточный ток от своих контактов ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний модуль, например 9.0007 ULN2003 модуль как драйвер шагового двигателя . Существует много типов драйверных модулей, и рейтинг одного из них будет меняться в зависимости от типа используемого двигателя. Основным принципом для всех модулей драйверов будет получение/потребление тока, достаточного для работы двигателя. Кроме того, существуют также модули драйверов, в которые запрограммирована логика, но мы не будем обсуждать это здесь.
Это связано с тем, что модуль контроллера (микроконтроллер/цифровая схема) не сможет обеспечить достаточный ток от своих контактов ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний модуль, например 9.0007 ULN2003 модуль как драйвер шагового двигателя . Существует много типов драйверных модулей, и рейтинг одного из них будет меняться в зависимости от типа используемого двигателя. Основным принципом для всех модулей драйверов будет получение/потребление тока, достаточного для работы двигателя. Кроме того, существуют также модули драйверов, в которые запрограммирована логика, но мы не будем обсуждать это здесь.
Если вам интересно узнать как вращать шаговый двигатель с использованием некоторого микроконтроллера и микросхемы драйвера, затем мы рассмотрели много статей о его работе с различными микроконтроллерами:
- Взаимодействие шагового двигателя с Arduino Uno
- Взаимодействие шагового двигателя с STM32F103C8
- Взаимодействие шагового двигателя с микроконтроллером PIC
- Интерфейс шагового двигателя с MSP430G2
- Взаимодействие шагового двигателя с микроконтроллером 8051
- Управление шаговым двигателем с Raspberry Pi
Теперь я полагаю, что у вас достаточно информации для управления любым шаговым двигателем, который вам нужен для вашего проекта. Рассмотрим преимущества и недостатки шаговых двигателей.
Рассмотрим преимущества и недостатки шаговых двигателей.
Преимущества шаговых двигателей
Одним из основных преимуществ шаговых двигателей является то, что они обеспечивают превосходное управление положением и, следовательно, могут использоваться для точного управления. Кроме того, он имеет очень хороший удерживающий момент, что делает его идеальным выбором для применения в робототехнике. Также считается, что шаговые двигатели имеют более длительный срок службы, чем обычные двигатели постоянного тока или серводвигатели.
Недостатки шаговых двигателей
Как и все двигатели, шаговые двигатели также имеют свои недостатки, поскольку они вращаются небольшими шагами и не могут развивать высокие скорости. Кроме того, он потребляет энергию для удержания крутящего момента, даже когда он идеален, что увеличивает потребление энергии.
Шаговый двигатель
: работа, конструкция, типы, преимущества и недостатки
Опубликовано
Делиться — значит заботиться :)-
Сегодня мы поговорим о шаговом двигателе, его работе, типах, преимуществах, недостатках и его функциональной области. Проще говоря, это комбинация двигателя постоянного тока с электронной технологией, которая позволяет двигателю вращаться и останавливаться на заданный угол. В основном он используется в робототехнике, где рука робота перемещается под заданным углом и удерживается там некоторое время, а после этого возвращается обратно.
Это бесщеточное электромеханическое устройство, которое используется для преобразования серии электрических импульсов, подаваемых на их обмотку возбуждения, в точно определенное пошаговое вращение механического вала. Другими словами, шаговый двигатель представляет собой электромеханическое устройство, преобразующее электрическую энергию в механическую.
Это особый тип двигателя постоянного тока, который не вращается непрерывно, а полный оборот делится на число равных шагов. Он работает по принципу теории работы магнитов, заставляющей вал поворачиваться на точное расстояние при подаче импульса электричества.
В шаговом двигателе количество входных импульсов, подаваемых на двигатель, определяет угол шага, и, следовательно, положение вала контролируется путем управления количеством импульсов. Эти уникальные особенности, отличные от серводвигателя, делают шаговый двигатель подходящим для системы управления с разомкнутым контуром, в которой точное положение вала поддерживается точным числом импульсов без использования датчика обратной связи.
Чем меньше угол шагов, тем больше будет количество шагов на один оборот и выше будет точность получаемого положения. Угол шага может составлять от 90 градусов до 0,72 градуса, однако обычно используемые углы шага составляют 1,8, 2,5, 7,5 и 15 градусов.
Конструкция:
Шаговый двигатель состоит из статора и ротора. Ротор представляет собой подвижную часть, не имеющую обмотки, щеток и коллектора. Статор состоит из многополюсной и многофазной обмотки, обычно из трех или четырехфазной обмотки, намотанной для необходимого количества полюсов, определяемого желаемым угловым смещением на входные импульсы.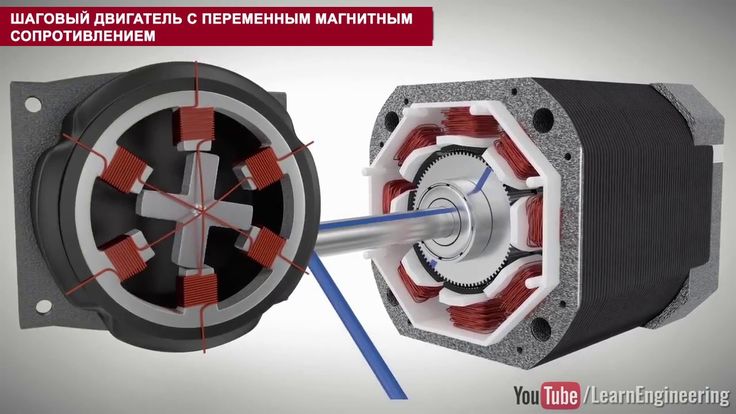
Рабочий:
Шаговый двигатель работает по принципу электромагнетизма. Вал магнитного ротора окружен электромагнитными статорами. Ротор и статор имеют полюса, которые могут иметь или не иметь зубья в зависимости от типа статора. Всякий раз, когда статоры возбуждают ротор, он перемещается, чтобы выровняться вместе со статором. Таким образом, статоры последовательно запитываются на разных полюсах, чтобы вращать шаговый двигатель. Благодаря очень хорошему управлению скоростью, вращением, направлением и угловым положением они представляют особый интерес для систем управления промышленными процессами, станков с ЧПУ, робототехники, систем автоматизации производства и контрольно-измерительных приборов.
Типы шаговых двигателей:
- Шаговый двигатель с переменным сопротивлением.
- Шаговый двигатель с постоянными магнитами.
- Гибридный шаговый двигатель.
1. Шаговый двигатель с переменным сопротивлением:
Шаговый двигатель с переменным сопротивлением:
Шаговый двигатель с переменным сопротивлением имеет простую конструкцию с мягким железом, немагнитным зубчатым ротором и электромагнитным статором с обмоткой. Отсутствие притяжения между ротором и обмоткой статора, когда обмотка находится под напряжением, поскольку ротор не намагничен. Когда к противоположной паре обмоток подключен ток, создается магнитное поле с силовыми линиями, которые проходят от полюсов статора через ближайший набор полюсов ротора. Это дает угол ступеней 7,5 или 15 градусов.
2. Шаговый двигатель с постоянными магнитами:
Шаговый двигатель с постоянными магнитами имеет ротор с постоянными магнитами, намагниченный в осевом направлении. Это означает, что он имеет чередующиеся северный и южный полюсы, параллельные валу ротора. На каждый полюс намотана обмотка возбуждения, витки на противоположной паре полюсов последовательно. Ток подается от источника постоянного тока на обмотку через переключатели. Ротор представляет собой постоянный магнит, и поэтому, когда на пару полюсов статора подается ток, ротор будет двигаться, чтобы выровняться с ним. Шаги угла этого двигателя 1,8, 7,5,15,30,34 и 90 градусов.
Ротор представляет собой постоянный магнит, и поэтому, когда на пару полюсов статора подается ток, ротор будет двигаться, чтобы выровняться с ним. Шаги угла этого двигателя 1,8, 7,5,15,30,34 и 90 градусов.
3. Гибридный шаговый двигатель:
Гибридный шаговый двигатель представляет собой сочетание постоянного и переменного реактивного двигателя. Он имеет постоянный магнит, зубчатый ротор, состоящий из двух секций или чашек, противоположных по полярности, зубья которых смещены друг относительно друга. Ротор устанавливается в положение минимального сопротивления в ответ на возбуждение пары катушек статора. Угол шага этого двигателя составляет 0,9 или 1,8 градуса.
Вы также можете посмотреть это видео, чтобы понять различные типы шаговых двигателей и принцип их работы.
Преимущества:
- Угол поворота пропорционален входным импульсам.
- Полный крутящий момент в состоянии покоя.
- Возможно синхронное вращение на очень низкой скорости.
- Щеток нет, так что надежно.
- Скорость прямо пропорциональна частоте входных импульсов; следовательно, может быть реализован широкий диапазон скорости вращения.
- Низкая скорость с высокой точностью.

Недостатки:
- Нет обратной связи.
- Низкая эффективность.
- Может производить больше шума.
- Трудно работать на очень высокой скорости.
- Для плавного хода требуется микрошаг.
Применение:
- Автоматизация производства.
- Упаковка.
- Погрузочно-разгрузочные работы.
- Аэрокосмическая промышленность, особенно авиационная электроника.
- Система получения трехмерных изображений.
- Лазерные измерения.
- Робототехника.
Это все о работе шагового двигателя, типах и т. д. Если у вас есть какие-либо вопросы по переоценке этой статьи, задайте их в комментариях. Если вам понравилась эта статья, не забудьте поделиться ею в социальных сетях. Подпишитесь на наш сайт, чтобы получать больше информативных статей. Спасибо, что прочитали это.
д. Если у вас есть какие-либо вопросы по переоценке этой статьи, задайте их в комментариях. Если вам понравилась эта статья, не забудьте поделиться ею в социальных сетях. Подпишитесь на наш сайт, чтобы получать больше информативных статей. Спасибо, что прочитали это.
Делиться — значит заботиться :)-
РубрикиМехатроникасообщить об объявлении
| На этой странице я объясню принцип работы шагового двигателя. Существует много видов шаговых двигателей. Однополярный тип, биполярный тип, однофазный тип, многофазный тип… Однофазный шаговый двигатель часто используется в кварцевых часах. На этой странице я объясню принцип работы двухфазного униполярного шагового двигателя с постоянными магнитами. В шаговом двигателе с постоянными магнитами в качестве ротора используется постоянный магнит, а катушки надеваются на статор. Модель шагового двигателя с 4 полюсами показана на рисунке слева. В случае этого двигателя угол шага ротора составляет 90 градусов. Что касается четырех полюсов, то верхняя, нижняя и обе стороны представляют собой пару. катушка, катушка и катушка, катушка соответствуют соответственно. Например, катушку и катушку прикладывают к верхнему и нижнему полюсу. катушка и катушка свернуты для того, чтобы направление полюса стало противоположным при подаче электрического тока на катушку и подаче электрического тока на катушку. Аналогично про и , тоже.
|


 Кроме того, поскольку ротор фиксируется магнетизмом в стационарном состоянии, как показано в принципе, стационарная мощность (стационарный крутящий момент) велика. Это подходит для остановки под некоторым углом.
Кроме того, поскольку ротор фиксируется магнетизмом в стационарном состоянии, как показано в принципе, стационарная мощность (стационарный крутящий момент) велика. Это подходит для остановки под некоторым углом.