Содержание
устройство, принцип работы, область применения
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы. Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название. Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент. Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей.
- Как устроен шаговый двигатель
- Принцип действия
- Виды и типы по полярности или типу обмоток
- Типы двигателей по конструкции ротора
- Управление ШД
- Достоинства и недостатки шаговых электродвигателей
Как устроен шаговый двигатель
По своему типу это бесколлекторный синхронный электродвигатель. Состоит из статора и ротора. На роторе обычно расположены секции, набранные из листов электротехнической стали (на фотографии это «зубчатая» часть), а те, в свою очередь, разделены постоянными магнитами. На статоре расположены обмотки, в виде отдельных катушек.
Принцип действия
Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля. Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.
Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В. В этом случае электромагнитное поле станет противоположным положению 1, ротор двигатели сместится, и общий угол будет 180°.
При подаче напряжения обратной полярности на обмотки D и C, ротор повернется на угол до 270° относительно начальной позиции. При подключении положительного напряжения на обмотки А и В ротор займет первоначальное положение — закончит оборот на 360°. Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения. При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.
Типы двигателей по конструкции ротора
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
- с постоянным магнитом;
- с переменным магнитным сопротивлением;
- гибридные.


ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.
Электромоторы с переменным магнитным сопротивлением. Ротор данных машин изготавливается из магнитомягких сплавов, их также называют «реактивный шаговый двигатель». Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело. В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.
Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.
Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов. Такие двигатели имеют маленький шаг в пределах от 0,9 до 5°, обладают высоким моментом и удерживающей способностью. Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы.
Для примера в ШД на 200 шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот. Благодаря этому у ротора есть 100 полюсов с обратной полярностью.
То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме 100.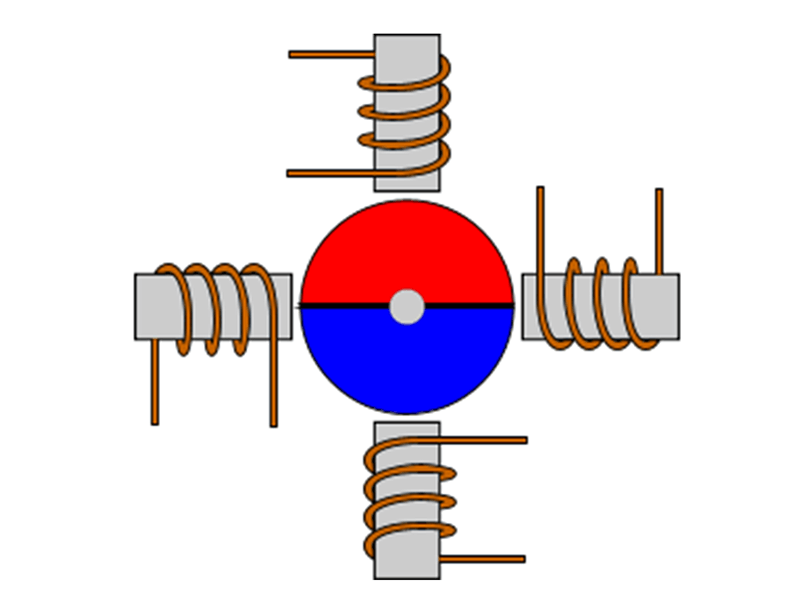 А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.
А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.
Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
- Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.
Недостатки:
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Материалы по теме:
- Какие бывают виды электрических двигателей и чем они отличаются
- Что такое шаговое напряжение и чем оно опасно
- Что такое синхронный двигатель и где он используется
Устройство и принцип действия шагового двигателя — Студопедия
Поделись
Принцип действия. Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых питание фаз обмотки якоря осуществляется путем подачи импульсов напряжения от какого-либо (например, электронного) коммутатора. Под воздействием каждого такого импульса ротор двигателя совершает определенное угловое перемещение, называемоешагом. Коммутатор преобразует заданную последовательность управляющих импульсов в т-фазную систему одно- или двухполярных прямоугольных импульсов напряжения;
Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых питание фаз обмотки якоря осуществляется путем подачи импульсов напряжения от какого-либо (например, электронного) коммутатора. Под воздействием каждого такого импульса ротор двигателя совершает определенное угловое перемещение, называемоешагом. Коммутатор преобразует заданную последовательность управляющих импульсов в т-фазную систему одно- или двухполярных прямоугольных импульсов напряжения;
| Рис. 7.15. Схемы работы шагового двигателя при питании различных фаз обмотки якоря |
На рис. 7.15 изображена схема m-фазного шагового двигателя без обмотки возбуждения на роторе. Если фазы 1, 2, 3,…,m обмотки якоря рассматриваемого двигателя питаются поочередно однополярными импульсами напряжения, то ротор двигателя скачкообразно перемещается в положения, при которых его ось совпадает с осями фаз 1,2, 3 и т. п. Следовательно, ротор имеетm устойчивых состояний, соответствующих направлению вектора МДС F→1 (рис. 7.15, а) обмотки якоря в данный момент времени; при этом шаг ротора равен 2π/m.
Следовательно, ротор имеетm устойчивых состояний, соответствующих направлению вектора МДС F→1 (рис. 7.15, а) обмотки якоря в данный момент времени; при этом шаг ротора равен 2π/m.
Для увеличения результирующей МДС якоря, а следовательно, магнитного потока и синхронизирующего момента обычно одновременно подают питание на две, три и большее количество фаз. Так, например, если одновременно подают питание на две фазы, то положение результирующего вектора МДС F→peз и оси ротора совпадает с линией, проходящей между осями двух соседних фаз (рис. 7.15,б). При подаче питания одновременно на три соседние фазы ротор перемещается в положение, совпадающее с осью средней фазы (рис. 7.15, в). Если поочередно включают то четное (две), то нечетное (одна, три) число фаз, то ротор двигателя имеет 2mустойчивых состояния и шаг равен π/m. Управление двигателем, при котором фазы обмотки якоря включают поочередно равными группами по две, три и т, п. , называют симметричным; поочередное включение неравных групп фаз — несимметричным.
, называют симметричным; поочередное включение неравных групп фаз — несимметричным.
В качестве шаговых обычно применяют синхронные двигатели без обмотки возбуждения на роторе: с постоянными магнитами, реактивные и индукторные (с подмагничиванием). Для получения требуемых статических характеристик и динамических свойств их выполняют без пусковой обмотки, с ротором минимального диаметра и рассчитывают на большие электромагнитные нагрузки.
| Рис. 7.16. Положения ротора шагового двигателя с постоянными магнитами при различных полярностях включения его фаз и диаграмма изменения тока в этих фазах |
Применение шагового двигателя целесообразно для привода механизмов, имеющих старт-стопное движение, или механизмов с непрерывным движением, если управляющий сигнал задан в виде последовательности импульсов (лентопротяжных устройств для ввода и вывода информации, счетчиков, приводов станков с программным управлением и т. п.).
п.).
Двигатели с постоянными магнитами. Ротор двигателя (рис. 7.16) выполняют в виде постоянного магнита (звездочки) литой или составной конструкции без полюсных наконечников. Статор имеет явно выраженные полюсы, вокруг которых в полузакрытых пазах размещаются катушки обмотки якоря (двух-, трех- или четырехфазной). В многополюсных машинах число пазов на полюс и фазу q = 1, т. е. обмотку выполняют сосредоточенной. Шаговые двигатели этого типа называют также магнитоэлектрическими.
В двигателе с двухфазной обмоткой якоря при последо-вательной подаче импульсов напряжения на катушки полюсов ось магнитного потока скачкообразно перемещается на 90° (рис. 7.16, а, б, в). В результате под действием синхронизирующего момента при каждом импульсе ротор поворачивается на 90°, т.е. делает шаг, равный 90°. Возникновение синхронизирующего момента в шаговом двигателе при подаче питания на фазы обмотки якоря обусловлено теми же причинами, что и в синхронном двигателе обычного исполнения.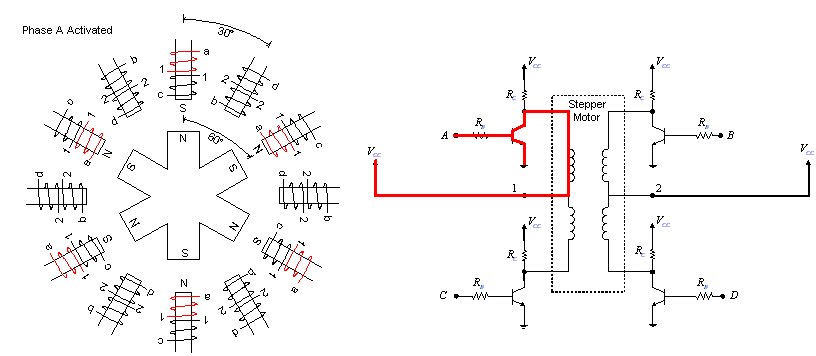 В рассматриваемом двигателе магнитное поле якоря может иметь четыре различных состояния, которым соответствуют различные направления тока в фазах 1 и 2 его обмотки:
В рассматриваемом двигателе магнитное поле якоря может иметь четыре различных состояния, которым соответствуют различные направления тока в фазах 1 и 2 его обмотки:
1. ток в фазе 1 направлен от начала к концу; фаза 2 обесточена;
2. ток в фазе 2 направлен от начала к концу; фаза 1 обесточена;
3. ток в фазе 1 направлен от конца к началу; фаза 2 обесточена;
4. ток в фазе 2 направлен от конца к началу; фаза 1 обесточена.
Порядок переключения (коммутации) фаз 1 и 2 обмотки якоря представлен на рис. 7.16, г в виде временной диаграммы; изменения токов Iв1 и Iв2 в этих фазах. Каждому импульсу тока соответствует определенное положение ротора двигателя. Рассмотренную систему переключения фаз 1 и 2 обмотки якоря называют четырехтактной разнополярной коммутацией и сокращенно обозначают следующим образом: (+1)-(+2)-(-1)-(-2)-(+1) — …. Каждым четырем тактам соответствует поворот ротора на два полюсных деления. Чтобы изменить направление вращения ротора, следует изменить полярность включения одной из фаз обмотки якоря, не изменяя очередность их коммутации. Для уменьшения шага шаговые двигатели обычно выполняют многополюсными. При этом число полюсных выступов на роторе должно быть равно числу полюсов статора. Наиболее часто используют восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
Чтобы изменить направление вращения ротора, следует изменить полярность включения одной из фаз обмотки якоря, не изменяя очередность их коммутации. Для уменьшения шага шаговые двигатели обычно выполняют многополюсными. При этом число полюсных выступов на роторе должно быть равно числу полюсов статора. Наиболее часто используют восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
(7.15)
αш = 360/(kp),
где k — число тактов в одном цикле; р — число пар полюсов. При четырехтактной коммутации шаг восьмиполюсного двигателя αш = 22,5°. Частота вращения ротора двигателя зависит от частоты подачи импульсов:
(7.16)
n2 = 60f1αш /360 = 60f1 /(kp).
Диапазон изменения частоты при четырехтактной коммутации обычно составляет 0 — 500 Гц; максимальной частоте соответствует частота вращения n2 max = 2000 ÷ 3000 об/мин. В ряде случаев для лучшего использования обмоток применяют четырехтактную коммутацию с попарным включением обмоток: (+1)(+2)-(+2)(-1)-(-1)(-2)-(-2)(+1)-(+1)(+ 2) — …. Такое включение обмоток позволяет увеличить результирующую МДС ротора, вследствие чего возрастает вращающий момент на валу двигателя примерно в полтора раза.
В ряде случаев для лучшего использования обмоток применяют четырехтактную коммутацию с попарным включением обмоток: (+1)(+2)-(+2)(-1)-(-1)(-2)-(-2)(+1)-(+1)(+ 2) — …. Такое включение обмоток позволяет увеличить результирующую МДС ротора, вследствие чего возрастает вращающий момент на валу двигателя примерно в полтора раза.
Обычно шаговые двигатели имеют четырехфазную обмотку, которая в отличие от двухфазной может управляться однополярными импульсами напряжения; это упрощает конструкцию электронного коммутатора. При подключении к электронному коммутатору фазы такой обмотки соединяют в четырехлучевую звезду с выведенной общей точкой. Коммутацию четырехфазной обмотки обычно выполняют четырехтактной, парной: (12)-(23)-(34)-(41)-(12)- …, вследствие чего обеспечивается такое же увеличение вращающего момента, что и при попарной разнополярлой коммутации двухфазной обмотки. Шаговые двигатели с трехфазной обмоткой требуют шеститактнойразнополярной коммутации.
Реактивные двигатели.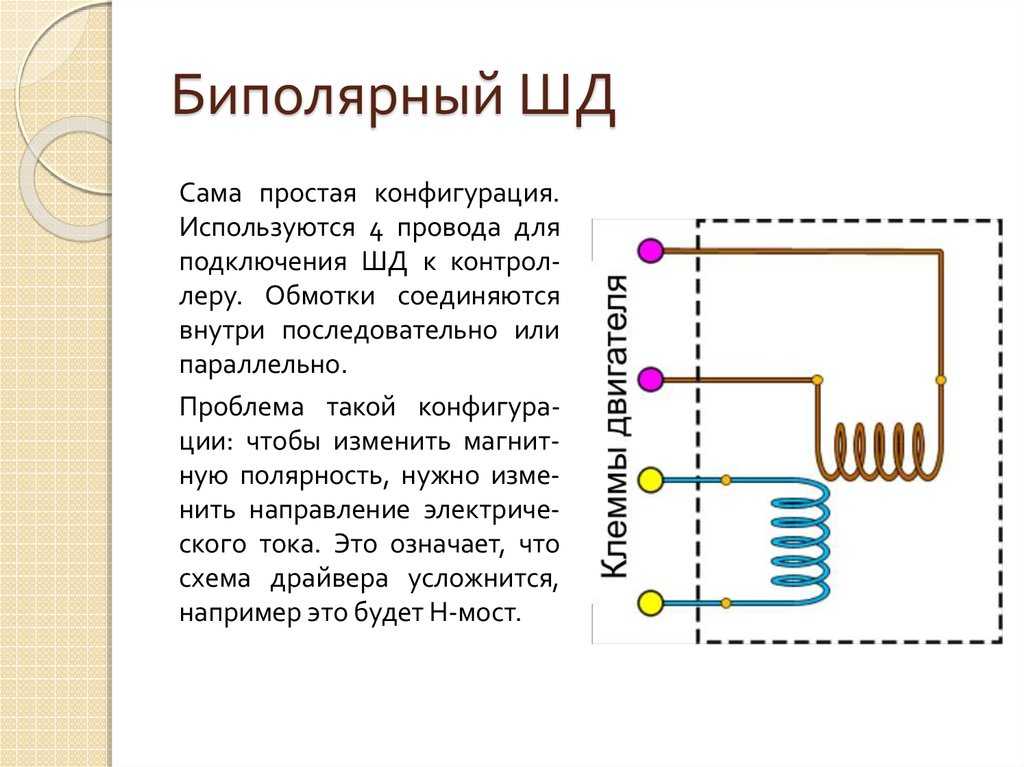 Ротор реактивного шагового двигателя выполняют из магнитномягкого материала. На статоре обычно располагают трехфазную сосредоточенную обмотку якоря, фазы которой получают питание от электронного коммутатора. Шаговые двигатели этого типа называют также параметрическими. На рис. 7.17, а, б и в схематично показаны три такта работы реактивного шагового двигателя с трехфазной обмоткой якоря и шестью выступами на статоре; на роторе имеются только два выступа. Когда по фазе 1 проходит ток, ротор занимает положение, показанное на рис. 7.17, а. В следующий момент времени питание подается одновременно на фазы 1 и 2, и ротор поворачивается в положение (рис. 7.17,б), соответствующее наибольшей магнитной проводимости для потока, созданного этими фазами. Далее питание с фазы 1 снимается и ротор перемещается в положение рис. 7.17, в. Таким образом, коммутация обмоток
Ротор реактивного шагового двигателя выполняют из магнитномягкого материала. На статоре обычно располагают трехфазную сосредоточенную обмотку якоря, фазы которой получают питание от электронного коммутатора. Шаговые двигатели этого типа называют также параметрическими. На рис. 7.17, а, б и в схематично показаны три такта работы реактивного шагового двигателя с трехфазной обмоткой якоря и шестью выступами на статоре; на роторе имеются только два выступа. Когда по фазе 1 проходит ток, ротор занимает положение, показанное на рис. 7.17, а. В следующий момент времени питание подается одновременно на фазы 1 и 2, и ротор поворачивается в положение (рис. 7.17,б), соответствующее наибольшей магнитной проводимости для потока, созданного этими фазами. Далее питание с фазы 1 снимается и ротор перемещается в положение рис. 7.17, в. Таким образом, коммутация обмоток
| Рис. 7.17. Положения (ротора реактивного шагового двигателя при различных полярностях включения фаз и диаграмма изменения тока в этих фазах |
статора происходит в следующем порядке:. (1) — (12) — (2) — (23) — (3) — (31) — (1)…, т. е. коммутация является несимметричной, шеститактной, однополярной (рис. 7.17, г). При этом шаг двигателя αш = 30°. Возможна и трехтактнаякоммутация но схеме: (1) — (2) — (3) — (1) или (12) — (23) — (31) — (12)…. Как правило, применяют шеститактную коммутацию, которая дает меньший шаг и большую устойчивость работы двигателя.
(1) — (12) — (2) — (23) — (3) — (31) — (1)…, т. е. коммутация является несимметричной, шеститактной, однополярной (рис. 7.17, г). При этом шаг двигателя αш = 30°. Возможна и трехтактнаякоммутация но схеме: (1) — (2) — (3) — (1) или (12) — (23) — (31) — (12)…. Как правило, применяют шеститактную коммутацию, которая дает меньший шаг и большую устойчивость работы двигателя.
Шаг двигателя можно уменьшить, увеличив число выступов на роторе. Например, применяя шаговый двигатель с крестообразным ротором, при той же последовательности подачи импульсов, что и для двигателя, показанного на рис. 7.17, получают шаг, равный 15°. Дальнейшее уменьшение шага, т. е. повышение точности работы двигателя, можно обеспечить, увеличив число выступов на статоре и роторе, т. е, перейдя к схеме редукторного двигателя (см. рис. 7.11).
При малом шаге (5 — 1°) применяют реактивный редукторный шаговый двигатель с гребенчатыми выступами на статоре. Выпускаемые отечественной промышленностью реактивные редукторные шаговые двигатели имеют на статоре шесть полюсных выступов с гребенчатой зубцовой зоной.
Двигатели с подмагничиванием (индукторные). По конструктивному исполнению и принципу работы рассматриваемые двигатели сходны с редукторными двигателями, имеющими радиальное возбуждение. Возбуждение может создаваться обмоткой постоянного тока или постоянным магнитом, находящимся на статоре, как и в редукторных двигателях. Однако в шаговых индукторных двигателях постоянная составляющая магнитного поля обычно образуется за счет особого способа включения обмоток якоря. Например, если питать фазы обмотки якоря однополярными импульсами, то за счет постоянной составляющей тока в машине возникает неподвижное в пространстве магнитное поле, намагничивающее ротор. Следовательно, при соответствующей схеме питания обмоток возбуждения реактивный шаговый двигатель может работать как двигатель с подмагничиванием.
Индукторные шаговые двигатели с подмагничиванием имеют несколько лучшие характеристики, чем реактивные — больший электромагнитный момент, лучшую устойчивость и т. п. Однако для них требуется более сложный электронный коммутатор, который загружается постоянной составляющей тока возбуждения. Наличие постоянной составляющей тока в обмотке якоря двигателя приводит к возрастанию электрических потерь мощности. Максимальная частота подачи управляющих импульсов тока у двигателей с подмагничиванием меньшая, чем у реактивных.
п. Однако для них требуется более сложный электронный коммутатор, который загружается постоянной составляющей тока возбуждения. Наличие постоянной составляющей тока в обмотке якоря двигателя приводит к возрастанию электрических потерь мощности. Максимальная частота подачи управляющих импульсов тока у двигателей с подмагничиванием меньшая, чем у реактивных.
| Рис. 7.18. Рабочие характеристики шагового двигателя |
Режимы работы шаговых двигателей. Для работы шагового двигателя характерным является регулирование частоты вра-щения в широком диапазоне путем изменения частоты подачи управляющих импульсов тока. Таким же способом осуществляют его фиксированный останов, пуск и изменение направления вращения. В зависимости от частоты управляющих импульсов различают следующие режимы работы шаговых двигателей: статический, квазистационарный, установившийся и переходные.
Статический режим — это режим прохождения по обмоткам возбуждения постоянного тока, создающего неподвижное поле.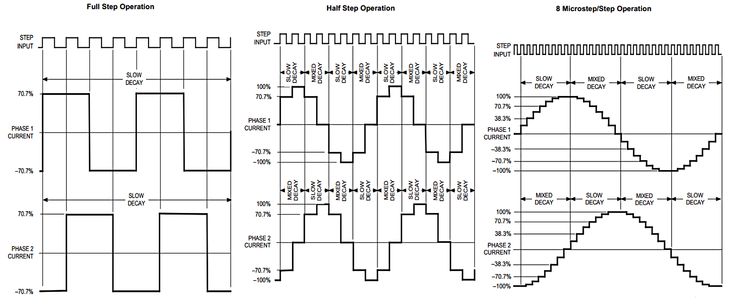 При питании одной фазы зависимость электромагнитного момента М от угла рассогласования θ близка к синусоидальной (рис. 7.18, а). Поскольку при θ = 0 синхронизирующий момент равен нулю, возникает статическая ошибка в положении ротора; она тем больше, чем больше нагрузка и меньше максимальный момент. В двигателях с гребенчатыми выступами на статоре и шагом, равным 1,5°, статическая ошибка составляет не более 0,5°.
При питании одной фазы зависимость электромагнитного момента М от угла рассогласования θ близка к синусоидальной (рис. 7.18, а). Поскольку при θ = 0 синхронизирующий момент равен нулю, возникает статическая ошибка в положении ротора; она тем больше, чем больше нагрузка и меньше максимальный момент. В двигателях с гребенчатыми выступами на статоре и шагом, равным 1,5°, статическая ошибка составляет не более 0,5°.
Квазистационарный режим — это режим отработки единичных шагов, например в приводах различных стартстопных, лентопротяжных и других подобных механизмов. Предельная частота квазистационарного режима ограничена временем затухания колебаний ротора, которые могут возникнуть при переходе ротора из одного устойчивого положения в другое (точки О и О’ на рис. 7.18, а), аналогично тому, как это происходит в обычной синхронной машине при резком изменении угла θ. Для устранения колебаний ротора в конце шага применяют различные демпфирующие устройства и обгонные муфты. Предельную частоту квазистационарного режима повышают, увеличивая число фаз обмотки якоря или число тактов коммутации (восьмитактная коммутация при четырехфазной обмотке, шеститактная — при трехфазной).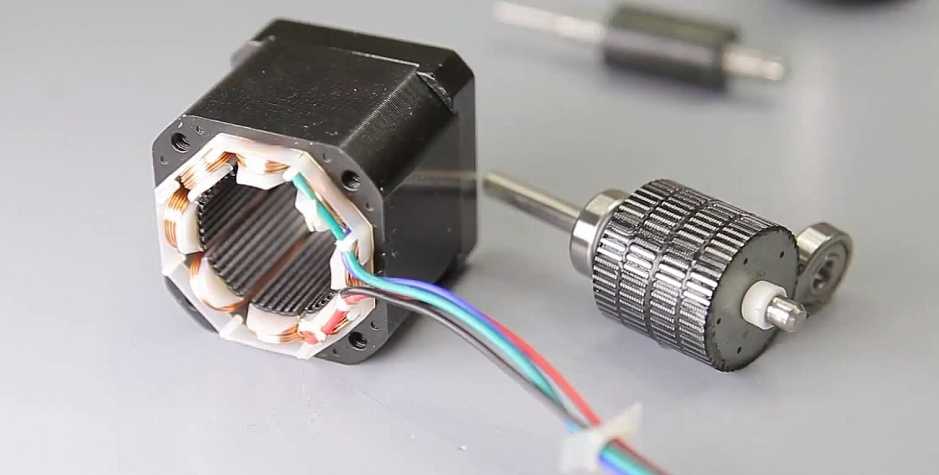 Во всех этих случаях при отработке шага уменьшается угол перемещения и кинетическая энергия ротора, что снижает его склонность к колебаниям.
Во всех этих случаях при отработке шага уменьшается угол перемещения и кинетическая энергия ротора, что снижает его склонность к колебаниям.
Установившийся резким — это режим, соответствующий постоянной частоте управляющих импульсов. Ротор двигателя в установившемся режиме имеет постоянную частоту вращения, но при переходе из одного устойчивого состояния в другое возникают периодические и апериодические колебания относительно мгновенной точки устойчивого равновесия. При частоте управляющих импульсов f1, меньшей частоты свободных колебаний двигателя f0, угловое перемещение ротора при каждом шаге, как и квазистационарном режиме, сопровождается свободными колебаниями, которые существенно увеличивают динамическую ошибку при отработке ротором заданного перемещения. Частота свободных колебаний ротора
(7.17)
f0 ≈ 0,135√Mmax p /(Jр + Jн ),
где Mmax — максимальный электромагнитный момент при неподвижном роторе; Jp и Jн — моменты инерции ротора и нагрузки, приведенной к валу ротора. При частоте управляющих импульсов, равной или в целое число раз меньшей частоты f0, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может вызвать нарушение периодичности движения ротора и привести к выпадению его из синхронизма. При частоте f1 > f0возникают вынужденные колебания с частотой, равной частоте управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты. Для устойчивой работы шагового двигателя необходимо, чтобы Мн /Mmax ≤ 0,3 ÷ 0,5, Jн /Jp ≤ l ÷ 2 и имелось внутреннее или внешнее; демпфирование. Электромагнитный момент шагового двигателя в общем случае состоит из двух частей: синхронизирующего момента, зависящего от угла θ между осями МДС обмотки якоря и ротора, и асинхронного тормозного момента, пропорционального частоте вращения, т. е. dθ/dt:
При частоте управляющих импульсов, равной или в целое число раз меньшей частоты f0, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может вызвать нарушение периодичности движения ротора и привести к выпадению его из синхронизма. При частоте f1 > f0возникают вынужденные колебания с частотой, равной частоте управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты. Для устойчивой работы шагового двигателя необходимо, чтобы Мн /Mmax ≤ 0,3 ÷ 0,5, Jн /Jp ≤ l ÷ 2 и имелось внутреннее или внешнее; демпфирование. Электромагнитный момент шагового двигателя в общем случае состоит из двух частей: синхронизирующего момента, зависящего от угла θ между осями МДС обмотки якоря и ротора, и асинхронного тормозного момента, пропорционального частоте вращения, т. е. dθ/dt:
(7.18)
М = Мсн + Мт = Mmax sin θ + Ddθ/dt.
Параметр D называют коэффициентом внутреннего демпфирования. Физически внутреннее демпфирование, т. е. тормозной момент Мт в двигателях с постоянными магнитами или обмоткой возбуждения на роторе, возникает в результате взаимодействия, вращающегося потока ротора с током в обмотке якоря (см. § 7.2). У реактивных двигателей этот момент зависит от разности индуктивных сопротивлений (Хd — Xq) обмотки якоря и ее активного сопротивления Ra .При достаточно большом значении коэффициента D происходит эффективное затухание колебаний ротора двигателя. Этому способствует также наличие трения и внешних демпфирующих устройств.
Переходные режимы — основные эксплуатационные режимы шаговых двигателей, включающие в себя пуск, торможение, реверс, переход с одной частоты на другую. Основным требованием, предъявляемым к шаговым двигателям в переходных режимах, является сохранение синхронизма при изменении частоты управляющих импульсов — отсутствие потери шага.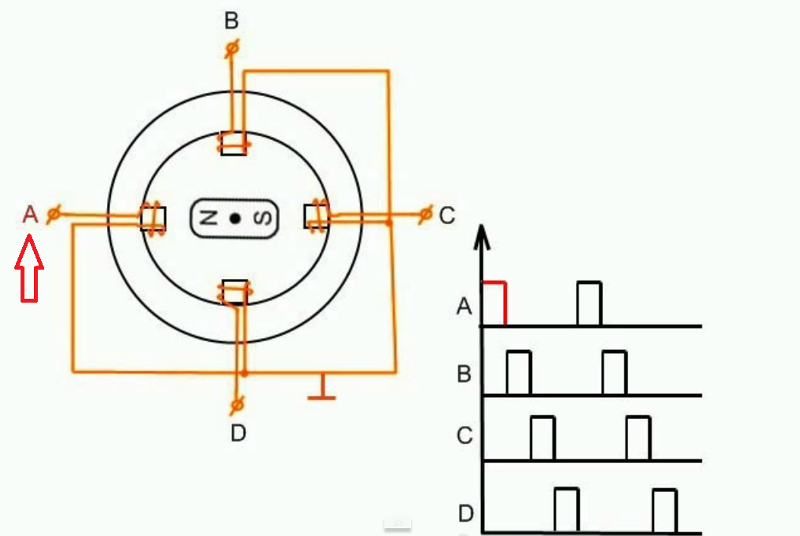
Для каждого шагового двигателя существует некоторая предельная частота подачи управляющих импульсов fпр , при которой ротор еще следует за скачкообразно изменяющимся полем статора. Эту частоту называют частотой приемистости. Частота приемистости характеризует пусковые свойства шагового двигателя — максимальную частоту управляющих импульсов, при которой возможен пуск без выпадения из синхронизма. Она возрастает с увеличением синхронизирующего момента, уменьшением углового шага, нагрузки и момента инерции.
Для современных шаговых двигателей при номинальной нагрузке частота приемистости fпр =100 ÷ 1000 Гц. Предельная частота, при которой осуществляется торможение шагового двигателя без потери шага (с сохранением синхронизма), как правило, выше частоты приемистости: это объясняется влиянием внутреннего демпфирования, момента нагрузки и момента трения. Предельная частота реверса, при которой реализуется реверс без выпадения из синхронизма (без потери шага) составляет (0,2 ÷ 0,5)fпр . Только в двигателях с большим демпфированием и электромагнитными постоянными времени обмоток якоря предельные частоты реверса и приемистости примерно равны.
Только в двигателях с большим демпфированием и электромагнитными постоянными времени обмоток якоря предельные частоты реверса и приемистости примерно равны.
Рабочие характеристики шаговых двигателей. Они определяются параметрами двигателя, нагрузки (нагрузочный момент и момент инерции) и особенностями электронного коммутатора (числом тактов коммутации, формой его выходного напряжения и пр.). Основными характеристиками являются: статическая, предельная механическая и предельная динамическая характеристики приемистости.
Статическая характеристика — это зависимость электромагнитного момента М от угла θ (рис. 7.18, а), а также зависимость тока двигателя от нагрузки в квазистационарном режиме.
Предельная механическая характеристика — это зависимость частоты управляющих импульсов от максимального момента на валу ротора, при котором происходит выпадение двигателя из синхронизма (рис. 7.18,б, кривая 1). Ее снимают при плавном увеличении частотыf1.
Предельная динамическая характеристика приемистости — это зависимость частоты приемистости fпр в динамическом режиме (например, при пуске) от момента нагрузки М (рис. 7.18,б, кривая 2). Рабочие характеристики снимают при различных сочетаниях включаемых обмоток, моментах инерции двигателя и нагрузки и пр.
Области применения. При высоких частотах вращения (2000—3000 об/мин) применяют шаговые двигатели с постоянными магнитами на роторе. Наличие активного ротора позволяет получить относительно большие моменты и обеспечить фиксацию ротора при обесточенных обмотках. У этих двигателей номинальный вращающий момент Мном = 0,1 ÷ 10 Н•см, угловой шагαш = 15°. При низких частотах вращения (до 1000 об/мин) и малом шаге применяют индукторные и реактивные двигатели с гребенчатыми выступами на полюсах статора. Их номинальный момент Мном = 1 ÷ 25 Н•см, а угловой шаг αш = 1,5 ÷ 3°.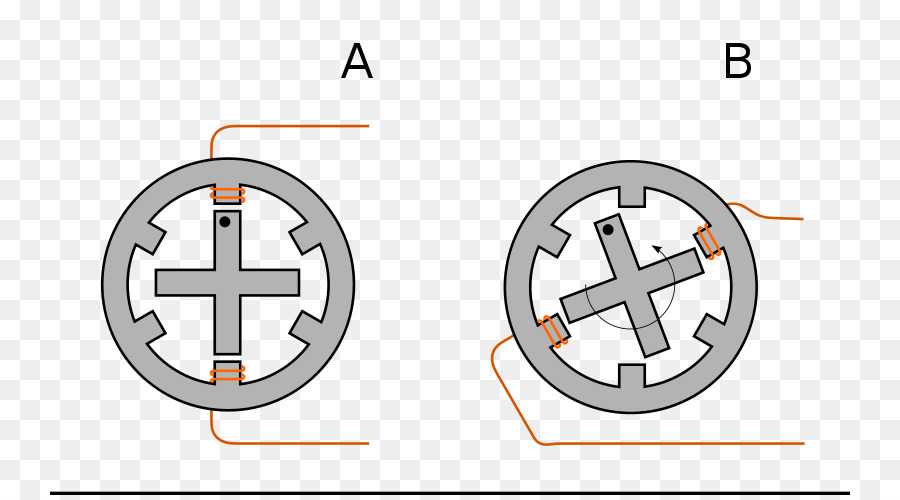
Основы шагового двигателя и принцип работы
Основы шагового двигателя
Что такое шаговый двигатель? Шаговый двигатель представляет собой привод, преобразующий электрический импульс в угловое перемещение. Как правило, при получении импульсного сигнала шаговый двигатель поворачивается на фиксированный угол (а именно «угол шага») в соответствии с направлением, заданным для шагового двигателя. Объем углового смещения можно контролировать, контролируя число импульсов для достижения цели точного позиционирования. Между тем, скорость вращения и ускорение двигателя можно контролировать, контролируя частоту импульсов для достижения цели управления скоростью.
Принцип действия шагового двигателя
Как работает шаговый двигатель? Ротор шагового двигателя представляет собой постоянный магнит, когда ток течет по обмотке статора, обмотка статора создает векторное магнитное поле. Магнитное поле заставляет ротор вращаться на угол, так что пара магнитных полей ротора и направление магнитного поля статора согласованы. Когда вектор магнитного поля статора поворачивается на угол, ротор также вращается с магнитным полем на угол. Каждый раз, когда подается электрический импульс, двигатель поворачивается на один градус дальше. Угловое смещение, которое он выдает, пропорционально количеству входных импульсов, а скорость пропорциональна частоте импульсов. Измените порядок мощности обмотки, двигатель будет двигаться в обратном направлении. Следовательно, он может управлять вращением шагового двигателя, контролируя количество импульсов, частоту и электрическую последовательность каждой фазной обмотки двигателя.
Когда вектор магнитного поля статора поворачивается на угол, ротор также вращается с магнитным полем на угол. Каждый раз, когда подается электрический импульс, двигатель поворачивается на один градус дальше. Угловое смещение, которое он выдает, пропорционально количеству входных импульсов, а скорость пропорциональна частоте импульсов. Измените порядок мощности обмотки, двигатель будет двигаться в обратном направлении. Следовательно, он может управлять вращением шагового двигателя, контролируя количество импульсов, частоту и электрическую последовательность каждой фазной обмотки двигателя.
Типы шаговых двигателей
Шаговые двигатели делятся на три типа: шаговые двигатели с постоянными магнитами (PM), шаговые двигатели с переменным сопротивлением (VR) и гибридные шаговые двигатели (HB).
- Шаговый двигатель с постоянными магнитами обычно двухфазный, с небольшим крутящим моментом и объемом; его угол шага обычно составляет 7,5 ° или 15 °.
- VR, как правило, трехфазный, может быть реализован высокий выходной крутящий момент; угол шага обычно 1,5, но шум и вибрация большие; магнитопровод ротора шагового двигателя VR выполнен из магнитомягких материалов. На роторе имеется многофазная обмотка возбуждения. Крутящий момент создается за счет изменения магнитной проводимости.
- HB, указывающий на сочетание преимуществ PM и VR, делится на 2-фазный, 3-фазный и 5-фазный. Шаговый угол 2-фазного обычно составляет 1,8°, 3-фазного 1,2° и 5-фазного 0,72°. Он в основном широко применяется.
Шаговый двигатель
 На роторе имеется многофазная обмотка возбуждения. Крутящий момент создается за счет изменения магнитной проводимости.
На роторе имеется многофазная обмотка возбуждения. Крутящий момент создается за счет изменения магнитной проводимости.Шаговый двигатель
Выбор шагового двигателя
- Угол шага: необходимо выбрать угол шага двигателя в соответствии с требованиями точности нагрузки. Наименьший коэффициент разрешения нагрузки обычно преобразуется в вал двигателя, обратите внимание на угол для каждого коэффициента разрешения, а угол шага двигателя должен быть равен или меньше угла. Как правило, угол шага 2-фазного мотор 0,9°/1,8°, 3-фазный 1,2° и 5-фазный 0,36°/0,72°. 2-фазный шаговый двигатель ATO имеет угол шага 1,8 градуса, а 3-фазный шаговый двигатель имеет угол шага 1,2 градуса.
- Статический крутящий момент: Выберите статический крутящий момент в соответствии с нагрузкой двигателя, при этом нагрузку можно разделить на инерционную и фрикционную. При прямом пуске двигателя (как правило, с низкой скорости на высокую) учитывайте два вида нагрузки. При запуске двигателя с ускорением учитывайте инерционную нагрузку; когда двигатель вращается с постоянной скоростью, учитывайте только нагрузку от трения. Как правило, статический крутящий момент должен в 2-3 раза превышать нагрузку трения.
- Ток: Что касается двигателей с одинаковым статическим крутящим моментом, существует большая разница в их характеристиках движения из-за разницы в параметрах тока. О токе тока можно судить по диаграмме частотной характеристики крутящего момента.

Если вы ищете шаговый двигатель Nema 17, шаговый двигатель Nema 23, шаговый двигатель Nema 34, ATO.com — лучший выбор для вас.
Шаговый двигатель: работа, конструкция, типы, преимущества и недостатки
Содержание
Делиться — значит заботиться :)-
Сегодня мы обсудим шаговый двигатель, его работу, типы, преимущества и недостатки с его функциональной областью. Проще говоря, это комбинация двигателя постоянного тока с электронной технологией, которая позволяет двигателю вращаться и останавливаться на заданный угол. В основном он используется в робототехнике, где рука робота перемещается под заданным углом и удерживается там некоторое время, а после этого возвращается обратно.
Проще говоря, это комбинация двигателя постоянного тока с электронной технологией, которая позволяет двигателю вращаться и останавливаться на заданный угол. В основном он используется в робототехнике, где рука робота перемещается под заданным углом и удерживается там некоторое время, а после этого возвращается обратно.
Это бесщеточное электромеханическое устройство, которое используется для преобразования серии электрических импульсов, подаваемых на их обмотку возбуждения, в точно определенное пошаговое вращение механического вала. Другими словами, шаговый двигатель представляет собой электромеханическое устройство, преобразующее электрическую энергию в механическую.
Это особый тип двигателя постоянного тока, который не вращается непрерывно, а полный оборот делится на число равных шагов. Он работает по принципу теории работы магнитов, заставляющей вал поворачиваться на точное расстояние при подаче импульса электричества.
В шаговом двигателе количество входных импульсов, подаваемых на двигатель, определяет угол шага, и, следовательно, положение вала контролируется путем управления количеством импульсов. Эти уникальные особенности, отличные от серводвигателя, делают шаговый двигатель подходящим для системы управления с разомкнутым контуром, в которой точное положение вала поддерживается точным числом импульсов без использования датчика обратной связи.
Чем меньше угол шага, тем больше будет количество шагов на один оборот и выше будет точность полученного положения. Угол шага может составлять от 90 градусов до 0,72 градуса, однако обычно используемые углы шага составляют 1,8, 2,5, 7,5 и 15 градусов.
Конструкция:
Шаговый двигатель состоит из статора и ротора. Ротор представляет собой подвижную часть, не имеющую обмотки, щеток и коллектора. Статор состоит из многополюсной и многофазной обмотки, обычно из трех или четырехфазной обмотки, намотанной для необходимого количества полюсов, определяемого желаемым угловым смещением на входные импульсы.
Рабочий:
Шаговый двигатель работает по принципу электромагнетизма. Вал магнитного ротора окружен электромагнитными статорами. Ротор и статор имеют полюса, которые могут иметь или не иметь зубья в зависимости от типа статора. Всякий раз, когда статоры возбуждают ротор, он перемещается, чтобы выровняться вместе со статором. Таким образом, статоры последовательно запитываются на разных полюсах, чтобы вращать шаговый двигатель. Благодаря очень хорошему управлению скоростью, вращением, направлением и угловым положением они представляют особый интерес для систем управления промышленными процессами, станков с ЧПУ, робототехники, систем автоматизации производства и контрольно-измерительных приборов.
Типы шаговых двигателей:
- Шаговый двигатель с переменным сопротивлением.
- Шаговый двигатель с постоянными магнитами.
- Гибридный шаговый двигатель.
1. Шаговый двигатель с переменным сопротивлением:
Шаговый двигатель с переменным сопротивлением имеет простую конструкцию с мягким железом, немагнитным зубчатым ротором и электромагнитным статором с обмоткой. Отсутствие притяжения между ротором и обмоткой статора, когда обмотка находится под напряжением, поскольку ротор не намагничен. Когда к противоположной паре обмоток подключен ток, создается магнитное поле с силовыми линиями, которые проходят от полюсов статора через ближайший набор полюсов ротора. Это дает угол ступеней 7,5 или 15 градусов.
2. Шаговый двигатель с постоянными магнитами:
Шаговый двигатель с постоянными магнитами имеет ротор с постоянными магнитами, намагниченный в осевом направлении. Это означает, что он имеет чередующиеся северный и южный полюсы, параллельные валу ротора. На каждый полюс намотана обмотка возбуждения, витки на противоположной паре полюсов последовательно. Ток подается от источника постоянного тока на обмотку через переключатели. Ротор представляет собой постоянный магнит, и поэтому, когда на пару полюсов статора подается ток, ротор будет двигаться, чтобы выровняться с ним. Шаги угла этого двигателя 1,8, 7,5,15,30,34 и 90 градусов.
3. Гибридный шаговый двигатель:
Гибридный шаговый двигатель представляет собой сочетание постоянного и переменного реактивного двигателя. Он имеет постоянный магнит, зубчатый ротор, состоящий из двух секций или чашек, противоположных по полярности, зубья которых смещены друг относительно друга. Ротор устанавливается в положение минимального сопротивления в ответ на возбуждение пары катушек статора. Угол шага этого двигателя составляет 0,9 или 1,8 градуса.
Вы также можете посмотреть это видео, чтобы понять различные типы шаговых двигателей и принцип их работы.
Преимущества:
- Угол поворота пропорционален входным импульсам.
- Полный крутящий момент в состоянии покоя.
- Возможно синхронное вращение на очень низкой скорости.
- Щеток нет, так что надежно.
- Скорость прямо пропорциональна частоте входных импульсов; следовательно, может быть реализован широкий диапазон скорости вращения.