Содержание
Управляем шаговым двигателем с телефона. Двигатель 28byj 48.
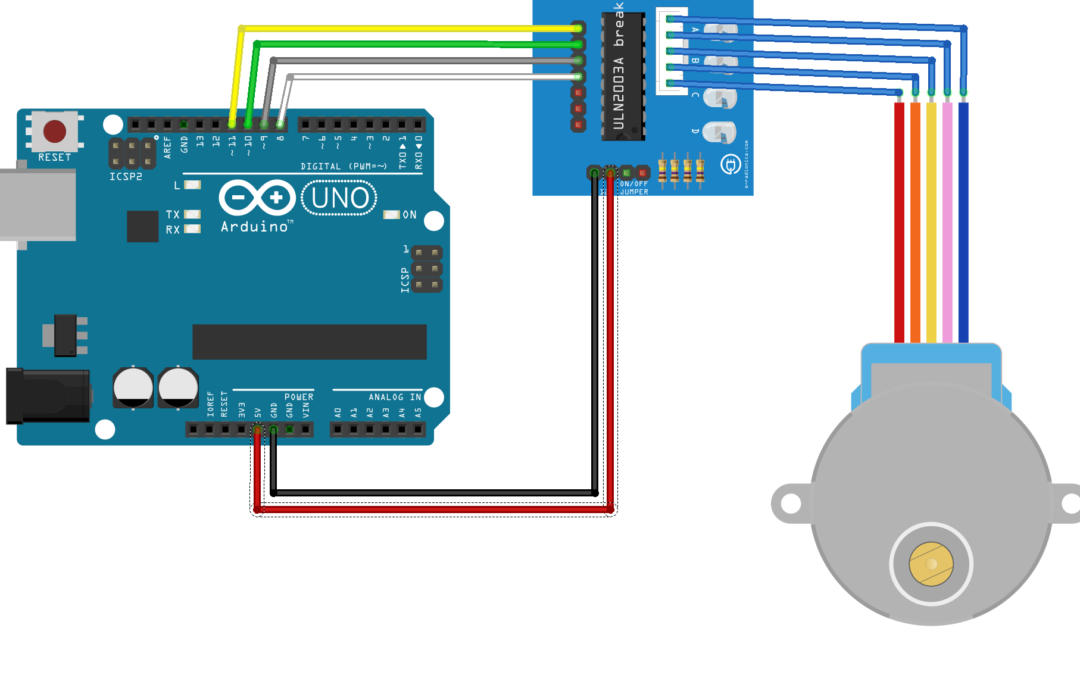
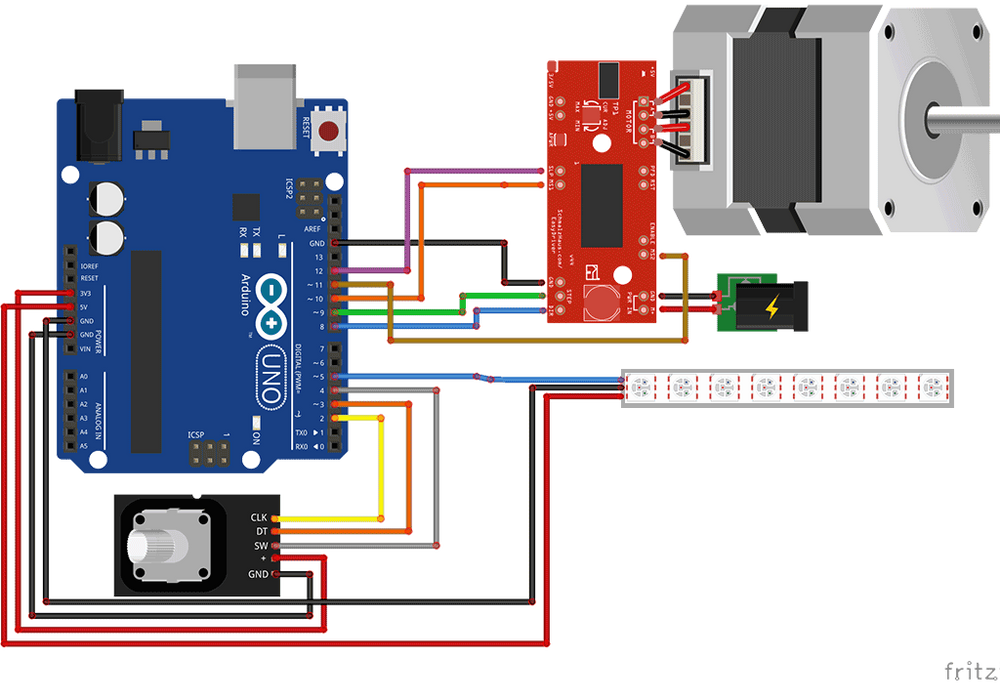
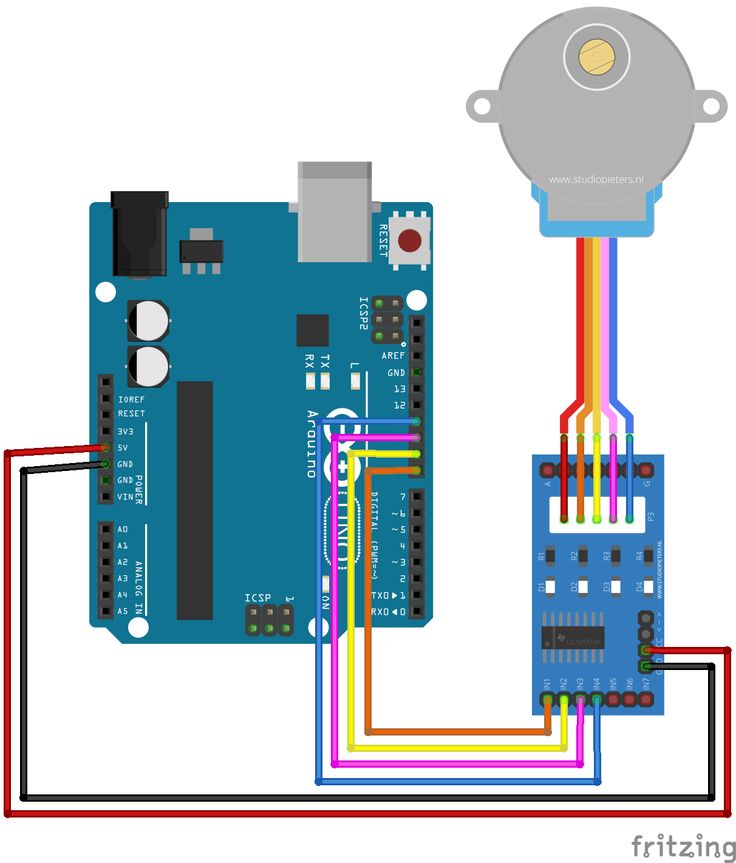
Подключение очень простое. Сначала вставляем разъём идущий от шагового двигателя к драйверу ULN2003, а контакты с драйвера соединяем с платой ESP. Что бы было проще, я соединил так.
- IN1 – D1,
- IN2 – D2,
- IN3 – D3,
- IN4 – D4
Питание.
контакт – соединил с землёй на плате, а + с контактом VIN.
Это уже 4 видео из серии — Управляем устройствами с телефона. Посмотреть их, можно здесь.
А теперь пробежимся по скетчу.
Это установленные библиотеки. Вам ничего дополнительно устанавливать не придётся. Все они входят в комплект ARDUINO IDE.
- Сюда вставляем имя WIFI сети и пароль.
- Создаём переменные для хранения значений к каким контактам на плате ESP подключен драйвер двигателя, для удобного обращения к ним.

- Так как мы не используем никаких библиотек для работы с шаговым двигателем, то нам придётся самим управлять шагами, Вот здесь мы и указываем, что делать при об обращении к этим массивам.
- Это переменная для обращения к команде стоп. Если она равна 3, то остановить двигатель.
- Здесь я создал переменную отвечающую за скорость вращения.
- 1 это максимальная скорость. А 70 это очень медленное вращение. Эти цифра – это просто delay в цикле между шагами.
- А это названия которые будут выведены на кнопках.

Следующий код
- Весь этот HTML код отвечает за вывод на экран кнопок при включенном состоянии и выключенном.
- Это кодировка для распознавания русского шрифта.
- Это title страницы.
- Здесь все основные настройки. Такие как ширина и высота, размер шрифта и цвет шрифта. И другие. Всё это будет работать, если дальше в тексте не будут внесены изменения.
- Это вывод на экран заголовка. Заголовок 3 уровня и выравнивание по центру.
- Здесь мы показываем каким шрифтом, цветом фона и выравниванием по центру будет выведено состояние двигателя. Крутится ли он по часовой или против, или вообще остановлен.Этот код отвечает за состояние и цвет кнопок, во включенном или выключенном состоянии. Ширину кнопок я указал 310 пикселей.
 Заголовок 3 уровня и выравнивание по центру.
Заголовок 3 уровня и выравнивание по центру.
Такой setup мы уже рассматривали десятки раз. Указываем, что выводы ESP работают на выход. Подключаемся у WIFI сети и получаем IP адрес по которому будем заходить на web страницу и запускаем сервер.
В цикле loop обрабатываем значение нажатой кнопки.
Если статус 1, то поворачиваем двигатель по часовой, а если 2, то против часовой. А это тот delay который мы установили в начале кода, и который отвечает за скорость вращения.
Этот код устанавливает значения статуса двигателя в зависимости от полученных сервером значений.
Если на сервер пришёл ON, установить статус 1 и крутить мотор в одну сторону, если 2, то в другую, а если 3, то остановить двигатель.
А это сама команда на вращение или остановку.
Теперь давайте ещё раз посмотрим как работает наша схема.
При нажатии на кнопку, например по часовой, двигатель начинает вращаться по часовой стрелке. Если нажать против часовой, то двигатель сразу начнёт вращаться в другую сторону. Так, что остановка двигателя, пред сменой направления не обязательна.
Остановку можно произвести с помощью специальной кнопки или ещё раз нажав на активную в данный момент кнопку.
Состояние двигателя можно увидеть сверху или по красному фону кнопки.
Переключения происходят практически без задержек.
Если вам интересна эта тема, то я могу снять продолжение этого видео. Можно вывести на экран не только смену направления движения, но и скорость или количество градусов на которое повернётся двигатель.
Объём вашего интереса, я буду оценивать по количеству лайков и комментариев. Чем их будет больше, тем быстрее выйдет новое видео.
Ну, а если вам нравятся мои уроки, то ставьте лайк и делитесь моими видео, с другими.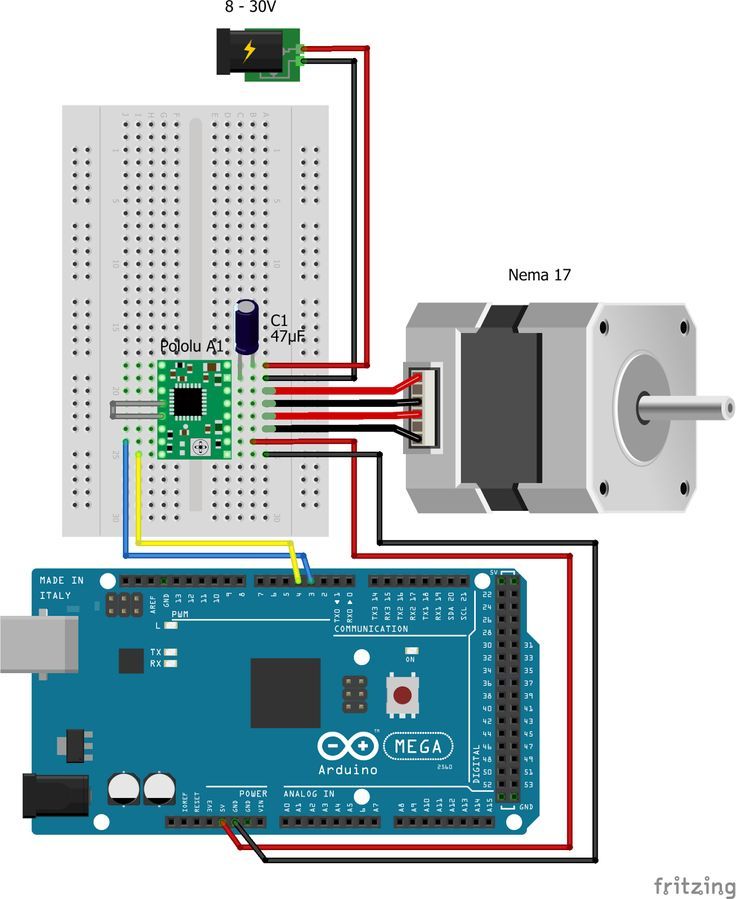 Это очень поможет мне в продвижении канала, а меня будет стимулировать выпускать уроки чаще и интереснее.
Это очень поможет мне в продвижении канала, а меня будет стимулировать выпускать уроки чаще и интереснее.
Вы видите ссылки на видео, которые, я думаю будут вам интересны. Перейдя на любое из этих видео вы узнаете что-то новое, а ещё поможете мне. Ведь любой ваш просмотр — это знак YOUTUBE, что это кому-то интересно и что его надо показывать чаще.
Спасибо.
А пока на этом всё.
Скетчи
Как подключить шаговый двигатель от принтера
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу. Станки и мехатроника. Станки с ЧПУ. Фрезерные станки с ЧПУ 6. Колонные бесконсольные станки с ЧПУ 1. Портальные станки с ЧПУ 4.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Как подключить шаговый двигатель с 6 выводами
- Схемы подключения шаговых двигателей.
- Мой самодельный ветрогенератор на шаговом двигателе
- Управление Ардуино шаговым двигателем от принтера
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
- Форум по СНПЧ: Шаговый двигатель из принтера — Форум по СНПЧ
- Как работает шаговый электродвигатель?
- Управление и подключение шагового двигателя к Ардуино (Arduino)
- Эксперимент с шаговым двигателем Mitsumi от лазерного принтера.
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Шаговые Двигатели Подключение и Запуск
 youtube.com/embed/Jw3DHiO2VPw» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/Jw3DHiO2VPw» frameborder=»0″ allowfullscreen=»»/>
Как подключить шаговый двигатель с 6 выводами
Статьи и видео. Другие измерительные приборы, платы и электронные компоненты. Что такое шаговый двигатель и как им управлять. При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
Каждый шаг представляет собой угол, величина которого зависит от устройства соответствующего двигателя. Кроме того, величиной угла можно управлять. Шаговые двигатели используются в самых разных областях: в автомобилестроении, приборостроении, везде, где требуется механическое движение с высокой точностью позиционирования. Популярно использование шагового двигателя и в точной робототехнике. Устройство шагового двигателя. Как любой мотор, шаговый двигатель состоит из статора и ротора.
Обмотки шагового двигателя выполнены на статоре. Они не зависят друг от друга. На роторе установлены постоянные магниты. Когда ток подается на одну из обмоток, ротор поворачивается на соответствующий угол, после чего останавливается. Подача тока на следующую обмотку опять вызывает поворот ротора, за которым следует остановка. Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Подача тока на следующую обмотку опять вызывает поворот ротора, за которым следует остановка. Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Таким образом, устройство шагового двигателя позволяет контролировать угол поворота ротора и частоту его вращения. В отличие от сервопривода никакого датчика позиционирования в устройстве шагового двигателя не предусмотрено.
Если есть желание разобрать двигатель, чтобы познакомиться с его устройством, то это плохая идея. Система ротор-статор представляет собой замкнутый магнитопровод, который при вмешательстве теряет ряд своих свойств, что может негативно сказаться на работе двигателя.
Поэтому разбирать двигатель категорически не рекомендуется. Принцип работы шагового двигателя. Перемещение шагового двигателя состоит из многочисленных шагов. Управление шаговым двигателем осуществляется с печатной платы, питание может подаваться от источника постоянного тока.
Отличие шагового двигателя от сервопривода. В отличие от сервопривода шаговый двигатель перемещается по шагам. Благодаря этому с его помощью можно совершать очень точные движения. У шагового двигателя такого ограничения нет. Он может вращаться непрерывно. Однако управлять шаговым двигателем сложнее, чем сервоприводом. Основные технические характеристики шагового двигателя.
Крутящий момент — механическая характеристика шагового двигателя. Чем выше крутящий момент, тем лучше способность двигателя преодолевать возникающее при вращении сопротивление. Удерживающий момент — это момент блокировки ротора, когда шаговый двигатель находится под напряжением, но вращения не происходит.
Стопорный момент тормозящий момент нужен, чтобы при совершении шага происходила фиксация ротора в конечной позиции. При отсутствии стопорного момента без поданного питания происходило бы проворачивание. Номинальное напряжение — зависит от индуктивности двигателя. Чем выше индуктивность, тем выше требуется напряжение. Номинальный ток — подается на обмотки шагового двигателя. Измеряется в Амперах.
Номинальный ток — подается на обмотки шагового двигателя. Измеряется в Амперах.
Угол полного шага — способность двигателя совершать перемещение при одном шаге, указывается в градусах. Момент инерции ротора — влияет на способность двигателя к разгону. Чем выше момент инерции, тем хуже разгон мотора. Длина двигателя — длина корпуса без вала. Типы шаговых двигателей.
По строению различают следующие типы шаговых двигателей:. Шаговый двигатель с постоянным магнитом. Постоянный магнит такого двигателя выполнен в виде диска. Он расположен на роторе, и создает крутящий момент за счет притяжения и отталкивания обмотки на статоре. Шаговый двигатель с переменным магнитным сопротивлением. Такой шаговый двигатель не имеет постоянного магнита. На его роторе расположено зубчатое колесо из специального металла. Крутящий момент невысокий, но зато отсутствует стопорящий момент.
Гибридный шаговый двигатель. Представляет собой сочетание двух вышеперечисленных видов двигателей. Для гибридных двигателей характерна очень маленькая величина шага, в результате чего они способны достигать максимальной точности. Однако стоимость таких двигателей достаточно высока. По типу обмотки шаговый двигатель может быть униполярным и биполярным. Преимущества шаговых двигателей. Для выполнения этих действий требуется минимальное время. Стабильная работа при высоких нагрузках. Позиционирование полностью определяется поступающими импульсами.
Однако стоимость таких двигателей достаточно высока. По типу обмотки шаговый двигатель может быть униполярным и биполярным. Преимущества шаговых двигателей. Для выполнения этих действий требуется минимальное время. Стабильная работа при высоких нагрузках. Позиционирование полностью определяется поступающими импульсами.
Подключение шагового двигателя к печатным платам Arduino. Доступная цена шаговых двигателей и их точная эффективная работа сделали такие двигатели востребованным компонентом в любительской робототехнике.
Для реализации различных творческих проектов шаговые двигатели подключатся к программируемому контроллеру Arduino. Такое подключение выполнить достаточно просто.
Обычно шаговый двигатель имеет от 4 до 6 проводов для подключения. Если у шагового двигателя четыре провода, то это биполярный двигатель. У биполярного двигателя два провода подключаются к одной обмотки, два — к другой. Шесть проводов имеет униполярный двигатель. При этом два провода подключаются к концам каждой обмотки, а один — к ее середине.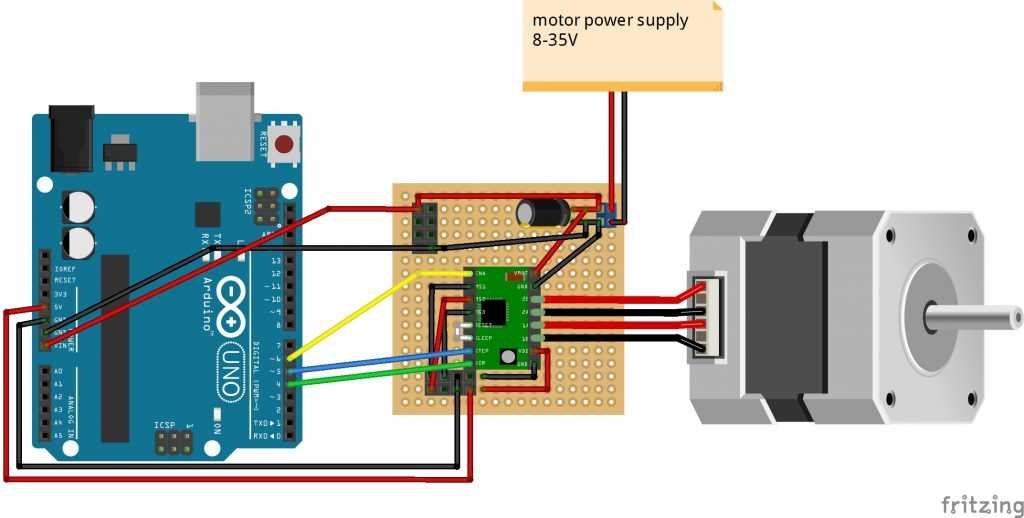
Эти провода подключаются к заземлению. В униполярном двигателе за счет способа его подключения скорость вращения выше, но меньше крутящий момент. Если требуется увеличить крутящий момент, то из униполярного двигателя всегда можно сделать биполярный. Для этого просто не нужно подключать дополнительные провода. При этом для контроллера не имеет значение, какой способ подключения выбран.
В обоих случаях управление производится через два выхода для каждой обмотки. Способ подключения выбирается в зависимости от того, что является в приоритете: скорость вращения или крутящий момент. Нет необходимости задействовать ШИМ-выходы, так как управление двигателем зависит только от подачи тока на обмотки.
ШИМ-выходы используются для полушаговых и микрошаговых режимов. С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем. Питание шагового двигателя.
Питание шагового двигателя.
Рекомендуется использовать внешний источник питания В, в противном случае ресурсов платы Arduino может оказаться недостаточно. Следует всегда помнить, что во время подключения или отключения двигателя на программируемый контроллер не должно подаваться питание! Иначе контроллер может просто сгореть.
Библиотеки и управление шаговым двигателем. Использование библиотеки позволяет упростить управление шаговым двигателем. Среди предлагаемых библиотек можно выделить библиотеку Stepper и Accel Stepper. Библиотеку Stepper не нужно скачивать, она входит в Arduino IDE и подойдет для управления шаговым двигателем в простых проектах, предусматривающих использование лишь одного двигателя. Библиотека Stepper подключается командой include. Библиотека Accel Stepper обладает большими возможностями.
Например, с ее помощью можно управлять сразу несколькими шаговыми двигателями, а также их работой на низких скоростях. Эта библиотека предусматривает возможность ускорения и замедления.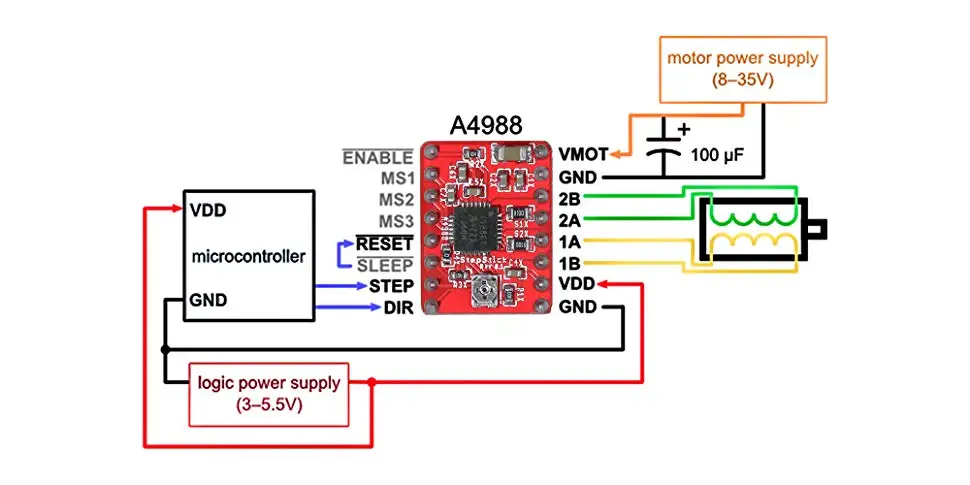 А главное она позволяет добиться плавной работы мотора. После подключения библиотеки создается объект stepper и указывается, к каким пинам подключаются обмотки.
А главное она позволяет добиться плавной работы мотора. После подключения библиотеки создается объект stepper и указывается, к каким пинам подключаются обмотки.
Для этого необходимо задать количество шагов для одного оборота вала. Также для управления шаговым двигателем используется драйвер.
Схемы подключения шаговых двигателей.
В этой статье мы поговорим о шаговых двигателях в проектах ардуино. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Схема работы шаговых двигетелй, способ подключения к Arduino и примеры скетчей — все это вы найдете в этой статье.
Для проверки работоспособности шагового двигателя можно подключить, например, красный светодиод. Вращая вал двигателя, можно наблюдать.
Мой самодельный ветрогенератор на шаговом двигателе
Дневники Файлы Справка Социальные группы Все разделы прочитаны. Как запустить шаговый двигатель? Когда-то работал на заводе. Довелось демонтировать старый принтер. От него у меня осталась вот такая штука: Можно ли ее запустить без контроллера? А если нет, то где взять или как собрать этот контроллер? И по силам ли это будет тому, кто не знает электротехники? Оценка 0. Крупнейшее в Китае предприятие по производству прототипов печатных плат, более , клиентов и более 10, онлайн-заказов ежедневно. Цель запуска?
Как запустить шаговый двигатель? Когда-то работал на заводе. Довелось демонтировать старый принтер. От него у меня осталась вот такая штука: Можно ли ее запустить без контроллера? А если нет, то где взять или как собрать этот контроллер? И по силам ли это будет тому, кто не знает электротехники? Оценка 0. Крупнейшее в Китае предприятие по производству прототипов печатных плат, более , клиентов и более 10, онлайн-заказов ежедневно. Цель запуска?
Управление Ардуино шаговым двигателем от принтера
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель , который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую.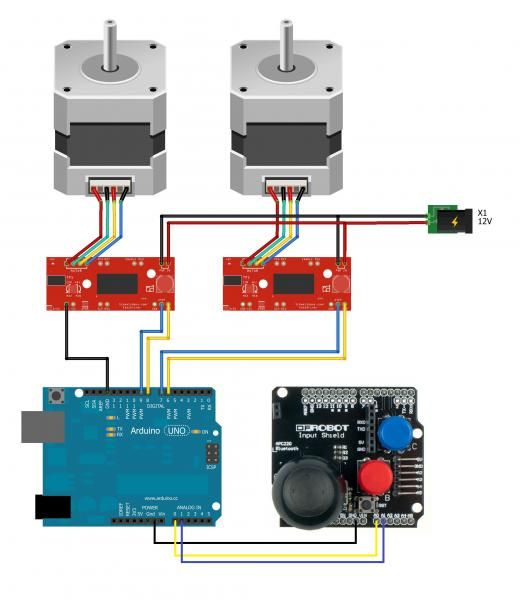
Имеется шаговый мотор с 5 выводами. Что я смог выяснить — этот моточик имеет 4 обмотки и один из выводов общий для всех выводов и сопротивление 5 Ом.
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
Перейти к содержимому. Система для сообществ IP. Лицензия зарегистрирована на: www. Вход Новый пользователь? Регистрация Помощь.
Форум по СНПЧ: Шаговый двигатель из принтера — Форум по СНПЧ
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах. Потом шестерня слезала. Без деструкции эту шестерню не одолеть, на горячую посажена. Сидит намертво.
Шаговый Двигатель От Принтера .. Так как с помощью LDNE подключить его к меге8, а проще, как переделеть готовую схему для.
Как работает шаговый электродвигатель?
By Шидя , December 3, in Автоматика. Можно ли каким то простым способом запустить шаговый двигатель не используя специальные сложные схемы запуска? Двигатель имеет пять выводов.![]()
Управление и подключение шагового двигателя к Ардуино (Arduino)
ВИДЕО ПО ТЕМЕ: 🔨 КАК ЗАПУСТИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ 💡 Без Драйвера!
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Шаговый двигатель — это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах.
В этом уроке вы узнаете, как управлять с помощью Ардуино шаговым двигателем, который был взят от старого принтера.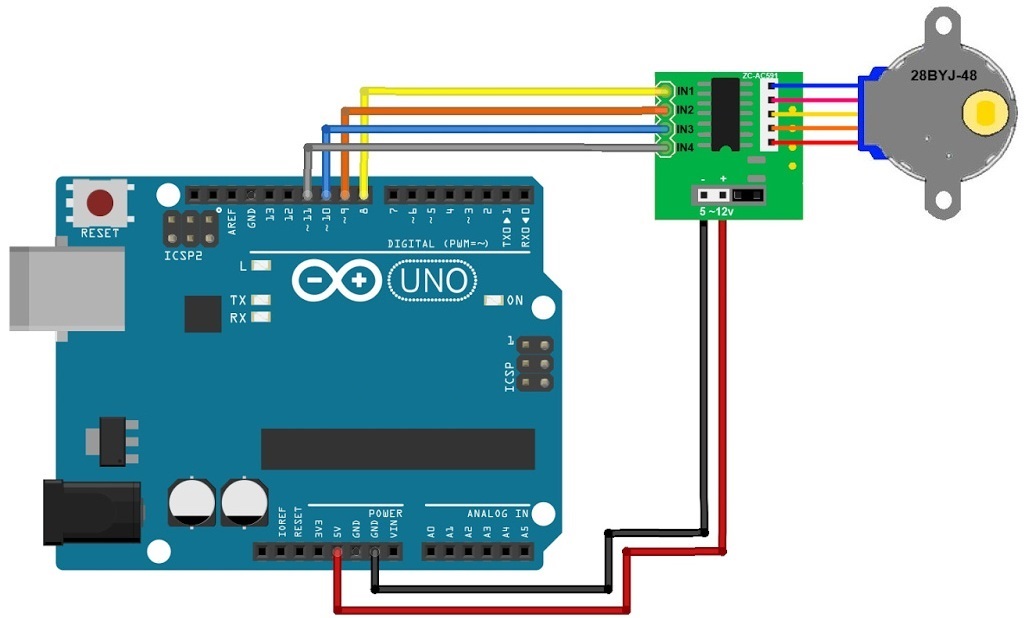 Ротор является частью двигателя, который фактически вращается и обеспечивает работу.
Ротор является частью двигателя, который фактически вращается и обеспечивает работу.
Эксперимент с шаговым двигателем Mitsumi от лазерного принтера.
Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое. На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов. Вот технологии быстро растут. И во всех этих аппаратов невозможно без шагового двигателя ШД.
Поиск новых сообщений в разделах Все новые сообщения Компьютерный форум Электроника и самоделки Софт и программы Общетематический. Как запустить шаговый двигатель? Сообщение от den Ads Яндекс.
Arduino — шаговый двигатель | Учебник по Arduino
сообщите об этом объявлении
ВНИМАНИЕ
Этот учебник в настоящее время обновляется.
| 1 | × | Arduino UNO or Genuino UNO | |
| 1 | × | USB 2. 0 cable type A/B 0 cable type A/B | |
| 1 | × | Arduino Моторный щит R3 | |
| 1 | × | СТАВИЛЬНЫЙ МОТОР | |
| 1 | × | (необязательно) 9V Power Adapter для Arduino |

 Он поддерживает метод микрошагов, который обеспечивает плавное движение шагового двигателя. Компания, производящая этот щит, хорошо предоставила документацию и учебные пособия. Однако, чтобы использовать этот щит, нам нужно использовать его вместе с шилдом PHPoC WiFi. Это НЕ добавляет трудностей, но увеличивает стоимость.
Он поддерживает метод микрошагов, который обеспечивает плавное движение шагового двигателя. Компания, производящая этот щит, хорошо предоставила документацию и учебные пособия. Однако, чтобы использовать этот щит, нам нужно использовать его вместе с шилдом PHPoC WiFi. Это НЕ добавляет трудностей, но увеличивает стоимость. Если вы считаете, что видеоуроки необходимы, подпишитесь на наш канал YouTube , чтобы дать нам мотивацию для создания видео.
Если вы считаете, что видеоуроки необходимы, подпишитесь на наш канал YouTube , чтобы дать нам мотивацию для создания видео.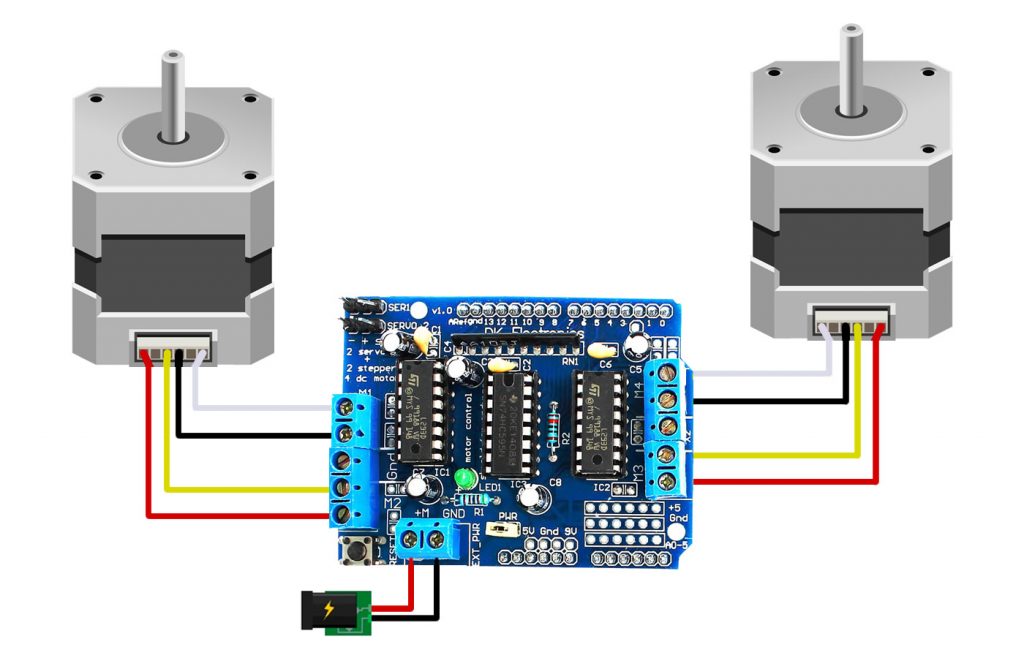 Единицей перемещения является часть полного шага. Дробь может быть 1/4, 1/8, 1/16, 1/32 и даже больше. Этот метод позволяет двигателю двигаться с более высоким разрешением. Это также делает двигатель более плавным на низких скоростях. Чем больше дивиденд, тем выше разрешение и плавнее движение.
Единицей перемещения является часть полного шага. Дробь может быть 1/4, 1/8, 1/16, 1/32 и даже больше. Этот метод позволяет двигателю двигаться с более высоким разрешением. Это также делает двигатель более плавным на низких скоростях. Чем больше дивиденд, тем выше разрешение и плавнее движение. В реальных приложениях разработчик ДОЛЖЕН обратить внимание на этот вопрос.
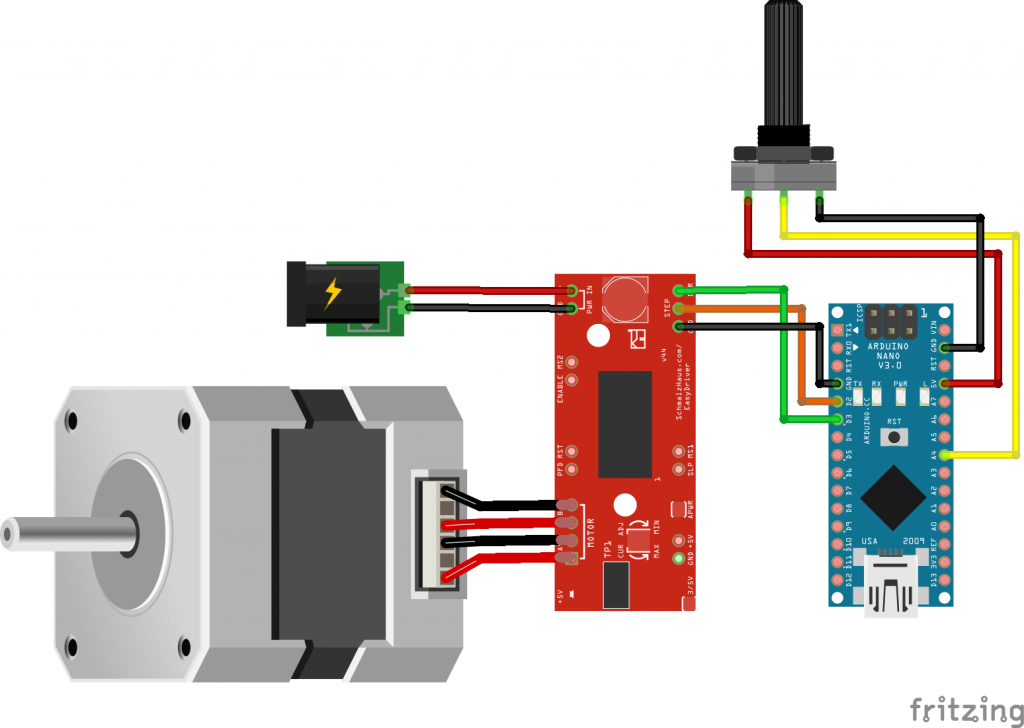
В реальных приложениях разработчик ДОЛЖЕН обратить внимание на этот вопрос. Обратите внимание, что потенциометр (потенциометр) на A4988 и DRV8825 находится на противоположной стороне
Обратите внимание, что потенциометр (потенциометр) на A4988 и DRV8825 находится на противоположной стороне )
) Это очень важно, потому что драйверы Pololu Stepper предназначены для увеличения тока до тех пор, пока он не достигнет необходимого для работы тока. Без подключенного шагового двигателя нечему будет потреблять ток, и вы можете повредить драйвер шагового двигателя, если он перегреется в процессе.
Это очень важно, потому что драйверы Pololu Stepper предназначены для увеличения тока до тех пор, пока он не достигнет необходимого для работы тока. Без подключенного шагового двигателя нечему будет потреблять ток, и вы можете повредить драйвер шагового двигателя, если он перегреется в процессе.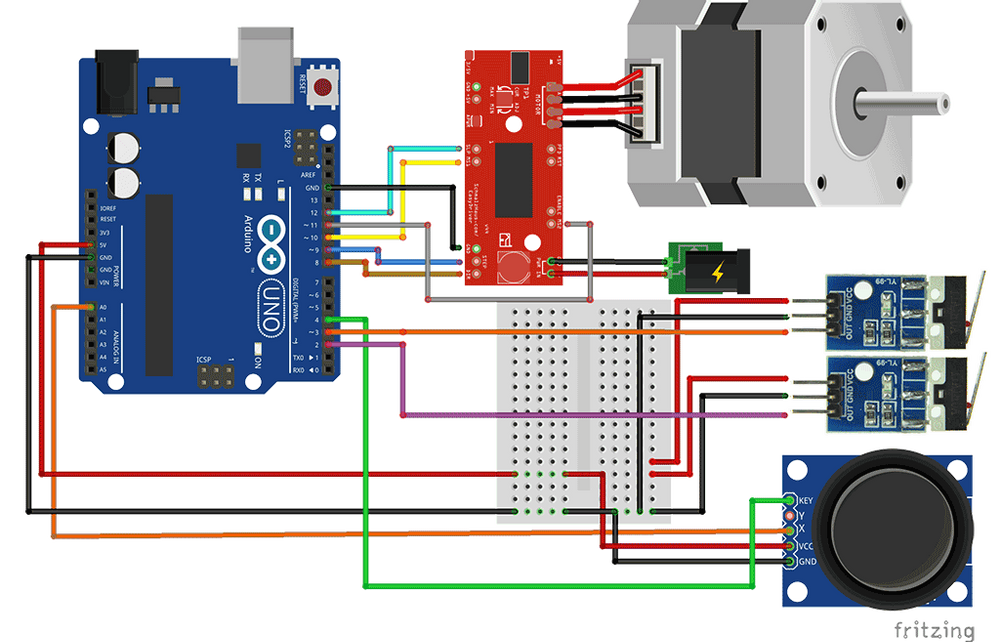 )
) Он также может работать как отдельная ось, используя цифровой контакт 12 для шагового сигнала и цифровой контакт 13 в качестве сигнала направления. (на данный момент GRBL поддерживает только 3 оси)
Он также может работать как отдельная ось, используя цифровой контакт 12 для шагового сигнала и цифровой контакт 13 в качестве сигнала направления. (на данный момент GRBL поддерживает только 3 оси) Клонировать ось X на 4-й шаговый драйвер | Клонировать ось Y для 4-го шагового привода | Клонировать ось Z на 4-й драйвер шагового двигателя | Используйте D12 и D13 для управления драйвером 4-го шагового двигателя |
Настройка микрошага для каждой оси
*В приведенных ниже таблицах высокий уровень означает, что перемычка установлена, а низкий уровень означает, что перемычка не установлена.
Pololu A4988 Конфигурация шагового драйвера:
MS0 MS1 MS2 MICROSTEP Разрешение
Низкий низкий низкий шаг
Высокий низкий низкий половинный шаг
Низкий высокий квартал
высокий высокий низкий шаг
Высокий высокий шаг Sixtesh Sectore Search Swep
903
33333333333333330303 Конфигурация драйвера шагового двигателя DRV8825:
MODE0 MODE1 MODE2 Microstep Разрешение
Низкий низкий низкий полной шаг
Низкий низкий низкий половинный шаг
Низкий низкий низкий 1/4 шаг
Высокий высокий низкий 1/8 Шаг
Низкий низкий высокий высокий 1/16 Шаг
Высокий высокий высокий 1/32 Шаг
Высокий высокий высокий 1// 32 шага
Высокий Высокий Высокий 1/32 шага
По умолчанию GRBL настроен на срабатывание предупреждения, если конечный упор становится низким (становится заземленным). Это обсуждалось, и некоторые люди просили иметь активные верхние конечные упоры. | Концевые выключатели — это стандартные «всегда открытые» выключатели. Концевой упор активируется, когда контакт конечного упора соединяется с землей (при настройке с настройками GRBL по умолчанию). |
 Перемычки на картинке выше предоставляют варианты для обоих. Левое изображение указывает на подключение, необходимое для работы с настройкой GRBL по умолчанию. (Эта перемычка появилась только в версии 3.02)
Перемычки на картинке выше предоставляют варианты для обоих. Левое изображение указывает на подключение, необходимое для работы с настройкой GRBL по умолчанию. (Эта перемычка появилась только в версии 3.02)Конфигурация конечной остановки
Концевые выключатели, входящие в комплект ZYLtech, имеют три провода. Такие концевики просты в использовании, контроле и установке, особенно по сравнению с простыми механическими переключателями. Однако, в отличие от экрана RAMPS, экран CNC предоставляет только 2 PIN-заголовка. Существует два способа установки концевых упоров:
Подключение двигателей
Подключение шаговых двигателей ZYLtech Nema 17 очень просто. Подключите разъемы к заголовкам для каждой оси.