Содержание
Arduino и двигатели||Arduino-diy.com
Одно из самых интересных в хобби-электронике – это использование двигателей для «оживления» ваших проектов.
Однако добавление мотора в ваш проект может оказаться непростой задачей, особенно, если вы до этого с приводами не работали.
Данная статья даст вам понимание принципов работы двигателей различных типов и пояснит многие необходимые нюансы и их особенности.
Принцип работы двигателей
Перед тем как разбираться, как именно моторы работаю, давайте сосредоточимся на том, для чего они используются. Моторы используют электромагнитные силы для обеспечения движения, преобразования электроэнергии в механическую.
Магнитные поля создают силу, которая может перемещать объекты. Каждый магнит имеет магнитное поле с северным и южным полюсом. Если вы попробуете приблизить два северных полюса двух магнитов, они будут отталкиваться. То же самое произойдет, если вы попытаетесь приблизить два южных полюса. Если полюса одинаковые, они будут отталкиваться друг от друга. Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Электродвигатель использует свойства магнитов отталкиваться и притягиваться для генерации движения. В обычном электродвигателе два магнита: постоянный и переменный. Переменный магнит называется электромагнитом. Электромагнит создается с помощью пропускания электрического тока через проводник. Постоянный магнит постоянно имеет магнитное поле (северный и южный полюса), а электромагнит генерирует магнитное поле только, когда через него пропускают электрический ток. Сила магнитного поля электромагнита может быть увеличена с помощью повышения тока, проходящего через проводник или методом формирования нескольких обмоток проводника.
В электродвигателе электромагнит устанавливается на ось таким образом, что он может свободно вращаться внутри магнитного поля постоянного магнита. В момент, когда через проводник проходит электрический ток, переменное магнитное поле взаимодействует со статическим магнитным полем магнита, возникают силы отталкивания и притяжения.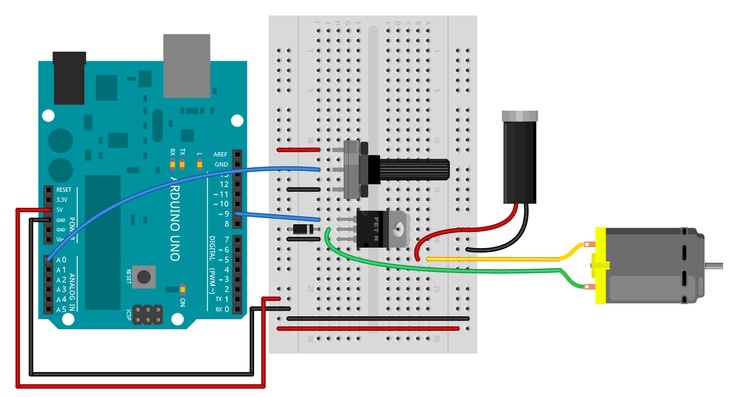 Это заставляет электромагнит вращаться, возникает движение.
Это заставляет электромагнит вращаться, возникает движение.
Основные узлы электродвигателя:
— Постоянный магнит (магниты), в случае, когда он установлен неподвижно, называется статором;
— внутри статора есть катушка, которая установлена на оси и вращается, называется ротором.
Двигатели постоянного тока
Двигатели постоянного тока (DC motor) во многом являются самыми простыми электродвигателями. Большинство «щеточных» двигателей работают одинаково. Есть ротор и статор. Есть магниты на статоре и катушка на роторе с магнитным полем, которое генерируется с помощью подачи на нее силы тока. Есть щетки внутри мотора, которые заставляют двигаться ротор.
При использовании источника постоянного тока, для управления подобным двигателем практически ничего не надо. Скорость его вращения зависит от силы тока, которая поступает на катушки от источника питания к коммутатору.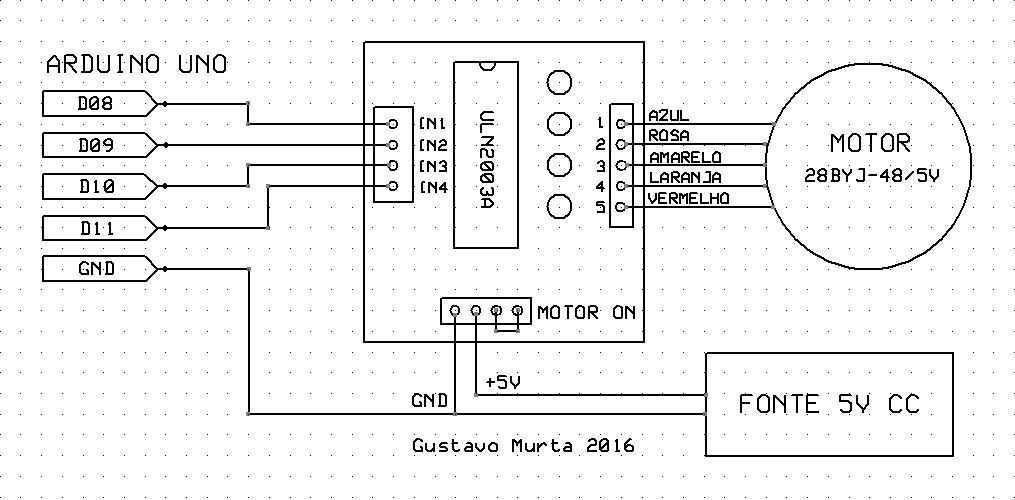
Для вращения оси двигателя в противоположном направлении, достаточно подключить контакты от источника питания к двигателю наоборот.
Шаговые двигатели
Как и двигатели постоянного тока, шаговые двигатели состоят из ротора и статора. Но, в отличие от других двигателей, ротор шагового двигателя представляет из себя постоянный магнит, который вращается внутри полей, создаваемых электромагнитами. Статор состоит из нескольких катушек, которые расположены в корпусе мотора. Когда ток проходит через катушки, подвижный вал двигателя (который является, по сути, постоянным магнитом) располагается в соответствии с генерируемым электромагнитной катушкой полем. Когда катушки заряжаются в определенной последовательности, вал двигателя выбирает новые положения и, соответственно, начинает вращаться.
Ротор приводится в движение последовательной подачей напряжения на катушки. Шаговый двигатель имеет возможность проворачивать ротор на определенный шаг в зависимости от разрешения импульса.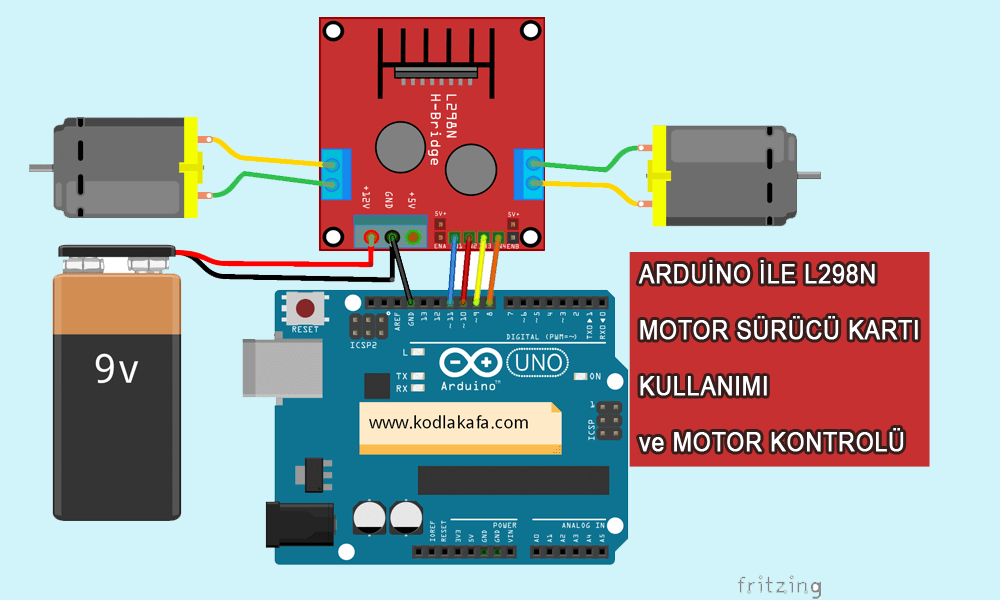
Шаговые двигатели являются отличным выбором для проектов на Arduino (и не только) по нескольким причинам. Они стоят относительно недорого, у них маленькая погрешность, следовательно – это идеальный выбор для управления с разомкнутой системой управления (без дополнительных датчиков положения рабочего органа). Шаговые двигатели будут обеспечивать заданное положение ротора исключительно в зависимости от поданной силы тока.
Эти двигатели предназначены для вращения в одном и противоположном направлении. Если вы подключите источник питания к контактам шагового двигателя, вал начнет вращаться. Если вы подключите проводники наоборот, он будет вращаться в противоположном направлении. Правда, стоит учесть, что в некоторых шаговых двигателях вращение в противоположную сторону невозможно. Перед его запуском, уточняйте этот момент.
Серводвигатели
Обычные серводвигатели для моделистов используются для поворота и удерживания определенной позиции в диапазоне от 0 до 180 градусов. Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
В большинстве случаем серводвигатели имеют три провода: питание, земля и сигнал. Обычно провод питания красного цвета, земля – черного или коричневого. Сигнал – желтый, оранжевый или белый.
В серводвигателях, которые, например, используются в системах управления радиоуправляемых машин, электродвигатель подключен к потенциометру. Стандартный приемник/передатчик посылает ШИМ-сигналы на серву. Электроника (небольшая плата-контроллер) внутри серводвигателя, переводит ширину импульса в положение. Когда на серву поступает сигнал к повороту, питание будет подаваться на мотор до тех пор, пока потенциометр не достигнет положения, которое будет соответствовать заданному предварительно через приемник/передатчик.
Сигнал управления является цифровым ШИМ сигналом с частотой 50 Гц. Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Импульс шириной 1.5 миллисекунды обычно устанавливает серводвигатель в «нейтральное» положение или 90 градусов. Импульс шириной 1.25 миллисекунд может установить его в 0 градусов, а импульс 1.75 миллисекунды в 180 градусов. Физические ограничения и время для различных серводвигателей могут отличаться, но его нейтральное положение всегда соответствует 1.5 миллисекундам.
Вибрационные двигатели
Вибрационные двигатели часто используются в мобильных устройствах для регистрации наличия движения.
Вибрационные моторы по конструктивному исполнению похожи на большинство шаговых двигателей и двигателей постоянного тока.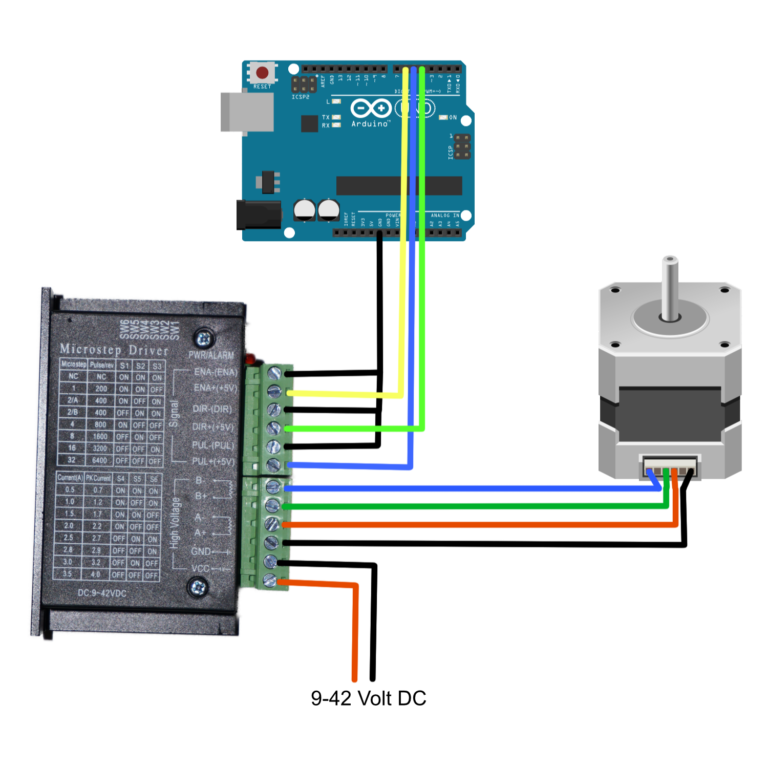 Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать.
Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать.
Интенсивность вибрации зависит как от размеров двигателя, так и от размеров эксцентрика.
На видео сверху показан мотор, установленный на металлической основе. Обратите внимание, как лист металла совершает волновые движения под действием вибрации вибрационного мотора.
Как выбрать двигатель для проекта
Выбор типа двигателя для вашего проекта зависит от того, что именно вы собираетесь автоматизировать. Если вы хотите установить камеру и обеспесить ее поворот влево-вправо, идеальным выбором будет серводвигатель. Если вы передаете движение на зубчатые колеса с необходимостью обеспечения реверса, лучшим выбором станет шаговый двигатель.
Естественно, отличным выбором для управления вашим двигателем станет плата Arduino или ее клоны. Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Дальше в статье приведена информация о том, как можно быстро «оживить» выбранный вами предварительно двигатель с использованием платы Arduino.
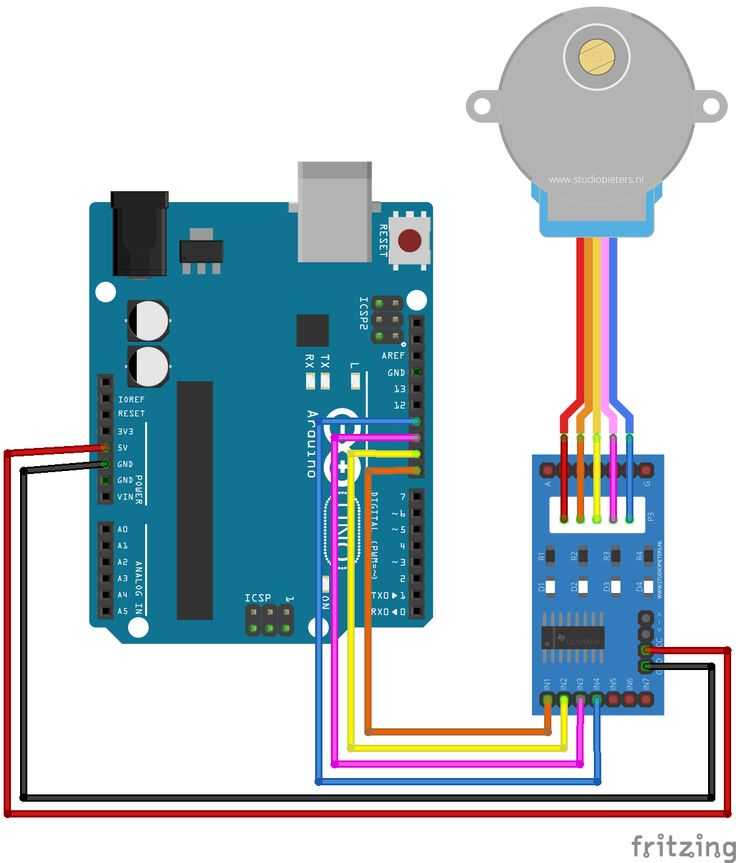
Использование шагового двигателя с Arduino
Стоит отметить, что «оживлять» свои проекты с помощью плат Arduino и оболочки Arduino IDE для их программирования очень легко из-за наличия большого количества уже готовых библиотек. Подключение шагового двигателя к плате Arduino отличается от подключения двигателя постоянного тока. Существует специальная библиотека и функция, встроенные в Arduino IDE. Более детально об этом вы можете почитать здесь.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Stepper -> stepper_oneRevolution
Данная программа дает возможность управлять уни- или биполярным шаговым двигателем после его подключения к цифровым пинам 8-11 на плате Arduino. После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
Данный пример – отличное начало. Естественно, вы можете вносить свои коррективы в программу, подстраивая ее под свои задачи. Задержка указывается в миллисекундах, так что если вы не хотите выдерживать паузу между оборотами, можете выставить задержку delay(10). Или, для того, чтобы замедлить вращение можете изменить stepsPerRevolution и присвоить ему значение, например, (1000000).
Изменения скетча зависят от того, что именно вы хотите реализовать. Для лучшего понимания того, как именно происходит обмен данными между шаговым двигателем и платой Arduino, советую поэкспериментировать с другими примерами.
Использование двигателя постоянного тока / вибрационного двигателя с Arduino
В некоторых проектах нет смысла использовать микропроцессоры вроде Arduino. Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
В таком случае, мотор будет подключатся непосредственно к вашему источнику питания через выключатель, который соединен с позитивным коннектором вашего двигателя.
Использование серводвигателя с Arduino
Так же как и шаговые двигатели, для работы серводвигателей в оболочке Arduino IDE есть встроенная библиотека.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Servo -> Knob
Данная программа обеспечивает управление серводвигателем, который подключен к 9-му ШИМ пину платы Arduino. Потенциометр, в свою очередь, подключен к аналоговому пину 0 и обеспечивает управление положением серводвигателя, посылая напряжение, пропорциональное сопротивлению на пин А0 платы Arduino. Скетч, который «залит» в плату Arduino, интерпретирует сигнал в импульсы, которые посылаются на серводвигатель. Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Как подключить бесколлекторный двигатель к ардуино
Содержание
- Подключение моторчика к Ардуино
- Управление двигателем на Ардуино
- Как подключить моторчик к Arduino
- Скетч. Подключение мотора напрямую
- Пояснения к коду:
- Скетч. Подключение мотора через транзистор
- Пояснения к коду:
- Скетч. Подключение мотора через драйвер
- Управление щёточными моторами с Arduino
- Мосфет
- Реле и мосфет
- Специальный драйвер
- Моторы переменного тока
- Библиотеки
- Помехи и защита от них
- Индуктивный выброс напряжения
- Помехи от щёток
- Помехи по питанию, просадка
- Разделение питания
- Экранирование
- Видео
- Подключение бесколлекторного электродвигателя постоянного тока (BLDC) к Arduino
- Необходимые компоненты
- Принцип действия BLDC двигателей
- Почему дроны и вертолеты используют именно BLDC двигатели?
- Зачем нужен контроллер ESC
- Некоторые термины, используемые в тематике BLDC и ESC
- Работа схемы
- Объяснение программы для Arduino
- Как запустить бесколлекторный двигатель на arduino
- Бесколлекторные моторы
- Обзор бесколлекторных моторов для Arduino
- Контроллеры бесколлекторных моторов (ESC регуляторы)
- Подключение к плате Arduino
- Пример использования
- Часто задаваемые вопросы
- Мир микроконтроллеров
- Популярное
- Подключение бесколлекторного электродвигателя постоянного тока (BLDC) к Arduino
- Необходимые компоненты
- Принцип действия BLDC двигателей
- Почему дроны и вертолеты используют именно BLDC двигатели?
- Зачем нужен контроллер ESC
- Некоторые термины, используемые в тематике BLDC и ESC
- Работа схемы
- Объяснение программы для Arduino
- Видео
Подключение моторчика к Ардуино
Подключение мотора к Ардуино ► потребуется при сборке машинки или катера. Рассмотрим различные варианты подключения коллекторного двигателя к Arduino.
Рассмотрим различные варианты подключения коллекторного двигателя к Arduino.
Подключение мотора постоянного тока к Ардуино (коллекторного двигателя) требуется при сборке машинки или катера на микроконтроллере Arduino. Рассмотрим различные варианты подключения двигателей постоянного тока: напрямую к плате, через биполярный транзистор, а также с использованием модуля L298N. В обзоре размещены схемы подключения и коды программ для всех перечисленных вариантов.
Управление двигателем на Ардуино
Коллекторный моторчик может быть рассчитан на разное напряжения питания. Если двигатель работает от 3-5 Вольт, то можно моторчик подключать напрямую к плате Ардуино. Моторы для машинки с блютуз управлением, которые идут в комплекте с редукторами и колесами рассчитаны уже на 6 Вольт и более, поэтому ими следует управлять через полевой (биполярный) транзистор или через драйвер L298N.
Принцип работы и устройство мотора постоянного тока
На схеме показано устройство моторчика постоянного тока и принцип его работы. Как видите, для того, чтобы ротор двигателя начал крутиться к нему необходимо подключить питание. При смене полярности питания, ротор начнет крутиться в обратную сторону. Драйвер двигателей L298N позволяет инвертировать направление вращения мотора fa 130, поэтому его удобнее использовать в своих проектах.
Как видите, для того, чтобы ротор двигателя начал крутиться к нему необходимо подключить питание. При смене полярности питания, ротор начнет крутиться в обратную сторону. Драйвер двигателей L298N позволяет инвертировать направление вращения мотора fa 130, поэтому его удобнее использовать в своих проектах.
Как подключить моторчик к Arduino
Для этого занятия нам потребуется:
Перед выбором способа управления двигателем от Arduino Uno r3, уточните на какое напряжение рассчитан ваш моторчик. Если питание требуется более 5 Вольт, то следует использовать транзистор или драйвер. Распиновка транзисторов может отличаться от приведенного примера (следует уточнить распиновку для своего типа). Драйвер L298N позволит не только включать мотор, но и изменять направление вращения.
Скетч. Подключение мотора напрямую
Подключение мотора к Ардуино напрямую — самый простой вариант включения вентилятора на Arduino или машинки. Команда для включения двигателя не отличается, от команды при подключении светодиода к микроконтроллеру. Функция digitalWrite включает/выключает подачу напряжения на цифровой порт, к которому подключен двигатель постоянного тока. Соберите схему и загрузите программу.
Функция digitalWrite включает/выключает подачу напряжения на цифровой порт, к которому подключен двигатель постоянного тока. Соберите схему и загрузите программу.
Пояснения к коду:
Скетч. Подключение мотора через транзистор
Подключение мотора через транзистор к Ардуино потребуется, если двигатель никак не хочет включаться от платы напрямую, то следует использовать порт 5 Вольт на микроконтроллере или внешний источник питания. Транзистор будет играть роль ключа, замыкая/размыкая электрическую цепь. Сам транзистор управляется цифровым портом. Соберите схему, как на картинке и загрузите программу.
Подключение FA-130 мотора постоянного тока — Motor DC Arduino
Пояснения к коду:
Скетч. Подключение мотора через драйвер
Подключение мотора к Ардуино через драйвер L298N или Motor Shield L293D позволит менять направление вращения ротора. Но для использования данных модулей потребуется установить соответствующие библиотеки для Ардуино. В примере мы использовали схему подключения двигателя с помощью модуля L298N. Соберите схему, как на картинке ниже и загрузите следующий скетч с использованием.
В примере мы использовали схему подключения двигателя с помощью модуля L298N. Соберите схему, как на картинке ниже и загрузите следующий скетч с использованием.
Источник
Управление щёточными моторами с Arduino
Как вы знаете, никакую нагрузку мощнее светодиода нельзя подключать к Ардуино напрямую, особенно моторчики. Ардуино, да и вообще любой микроконтроллер – логическое устройство, которое может давать только логические сигналы другим железкам, а те уже могут управлять нагрузкой. Кстати, урок по управлению мощной нагрузкой постоянного и переменного тока у меня тоже есть. “Драйвером” мотора могут быть разные железки, рассмотрим некоторые из них.
При помощи двойного модуля реле (или просто двух реле) можно включать мотор в одну или другую сторону, а также выключать:
Купить модуль реле можно на Aliexpress.
Мосфет
Вместо “голого” мосфета можно использовать готовый китайский модуль:
Купить мосфет модуль можно на Aliexpress.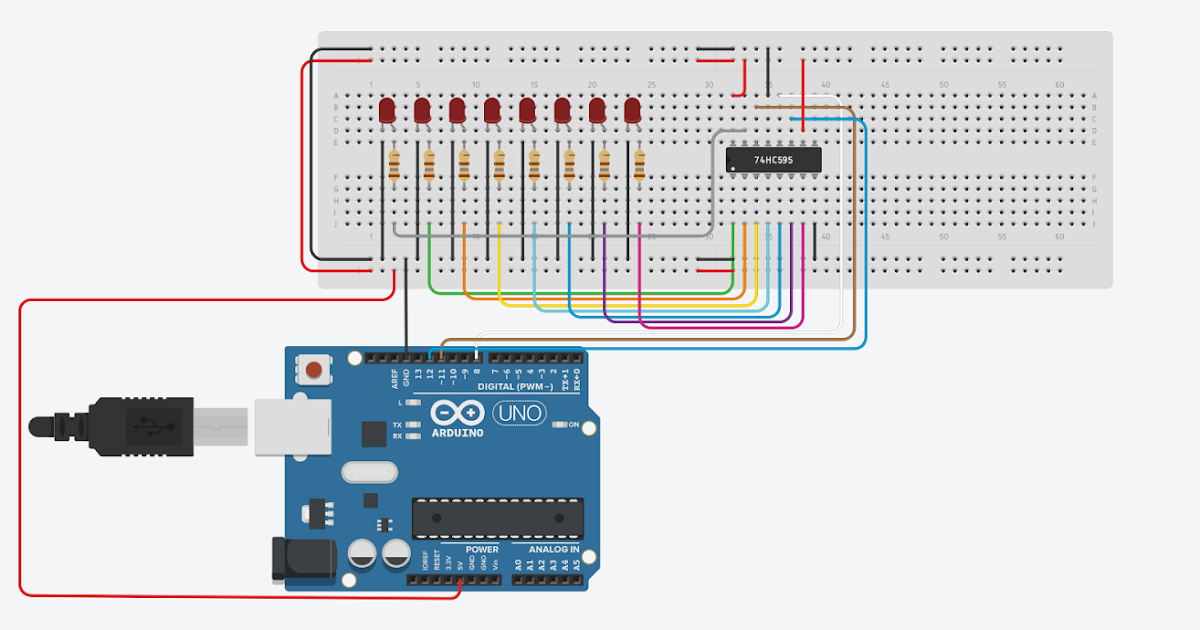
Реле и мосфет
Если объединить реле и мосфет – получим весьма колхозную, но рабочую схему управления скоростью и направлением мотора:
Специальный драйвер
Лучше всего управлять мотором при помощи специального драйвера, они бывают разных форм и размеров и рассчитаны на разное напряжение и ток, но управляются практически одинаково. Рассмотрим основные драйверы с китайского рынка:
| Драйвер | Vmot | Ток (пик) | Стоимость | Aliexpress |
| L298N | 4-50V | 1A (2A) | 100р | Купить |
| MX1508 | 2-9.6V | 1.5A (2.5A) | 20р | Купить |
| TA6586 | 3-14V | 5A (7A) | 100р (чип 30р) | Купить, купить, купить чип |
| L9110S | 2.5-12V | 0.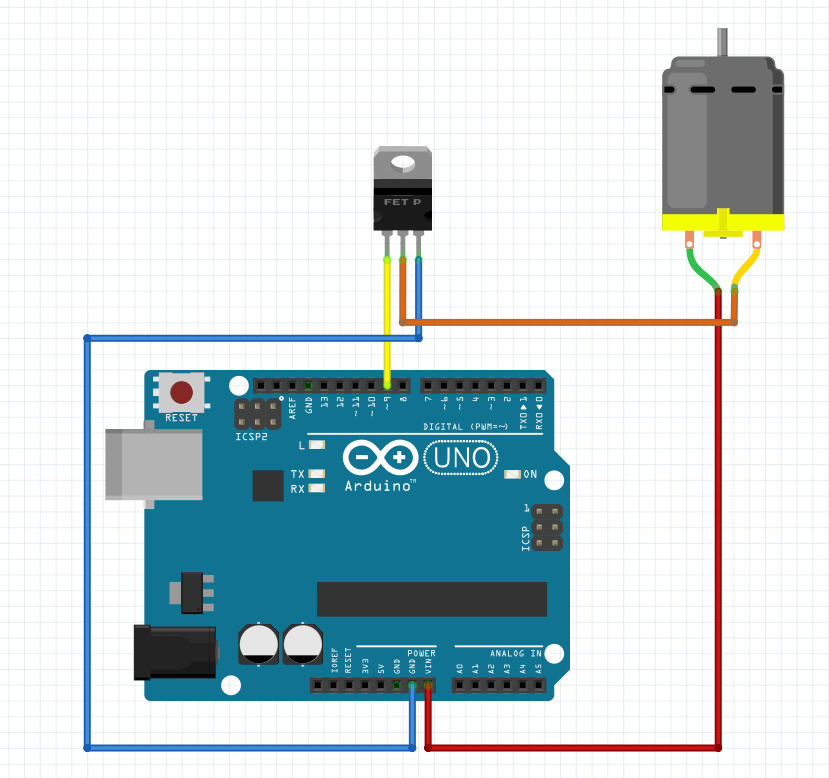 8A (1.5A) 8A (1.5A) | 50р | Купить |
| TB6612 | 4.5-13.5V | 1.2A (3A) | 80р | Купить |
| BTS7960 | 5.5-27V | 10A (43A) | 300р | Купить |
| Большой | 3-36V | 10A (30A) | 700р | Купить |
Остальные драйверы смотри у меня вот тут. Схемы подключения и таблицы управления:
Моторы переменного тока
Мотором переменного тока (220V от розетки) можно управлять при помощи диммера на симисторе, как в уроке про управление нагрузкой.
Библиотеки
У меня есть удобная библиотека для управления мотором – GyverMotor, документацию можно почитать вот здесь. Особенности библиотеки:
Помехи и защита от них
Индуктивный выброс напряжения
Мотор – это индуктивная нагрузка, которая в момент отключения создаёт индуктивные выбросы. У мотора есть щетки, которые являются источником искр и помех за счёт той же самой индуктивности катушки.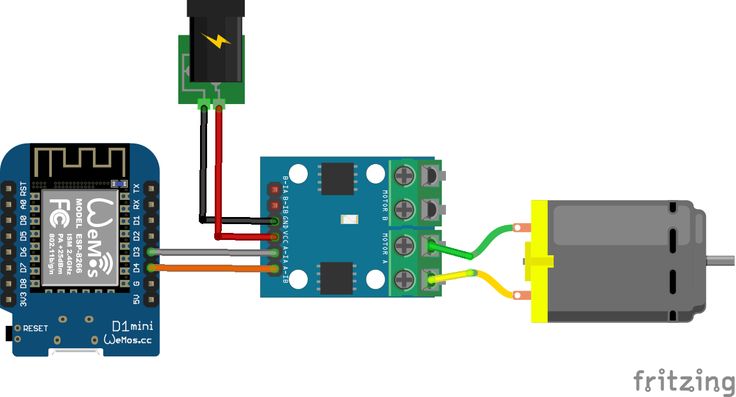 Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства.
Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства.
Отсечь индуктивный выброс с мотора можно при помощи самого обычного диода, чем мощнее мотор, тем мощнее нужен диод, то есть на более высокое напряжение и ток. Диод ставится встречно параллельно мотору, и чем ближе к корпусу, тем лучше. Точно таким же образом рекомендуется поступать с электромагнитными клапанами, соленоидами, электромагнитами и вообще любыми другими катушками. Логично, что диод нужно ставить только в том случае, если мотор или катушка управляется в одну сторону. Важные моменты:
Помехи от щёток
Искрящиеся щетки мотора, особенно старого и разбитого, являются сильным источником электромагнитных помех, и здесь проблема решается установкой керамических конденсаторов с ёмкостью 0. 1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор.
1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор.
Помехи по питанию, просадка
Мотор потребляет ток не очень равномерно, особенно во время разгона или в условиях переменной нагрузки на вал, что проявляется в виде просадок напряжения по питанию всей схемы. Беды с питанием решаются установкой ёмких электролитических конденсаторов по питанию, логично что ставить их нужно максимально близко к драйверу, то есть до драйвера. Напряжение должно быть выше чем напряжение питания, а ёмкость уже подбирается по факту. Начать можно с 470 мкф и повышать, пока не станет хорошо.
Разделение питания
Если описанные выше способы не помогают – остаётся только одно: разделение питания. Отдельный малошумящий хороший источник на МК и сенсоры/модули, и отдельный – для силовой части, в том числе мотора. Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Экранирование
В отдельных случаях критичными являются даже наводки от питающих проводов моторов, особенно при управлении ШИМ мощными моторами и управлении мощными шаговиками в станках. Такие наводки могут создавать сильные помехи для работающих рядом чувствительных электронных компонентов, на аналоговые цепи, наводить помехи на линии измерения АЦП и конечно же на радиосвязь. Защититься от таких помех можно при помощи экранирования силовых проводов: экранированные силовые провода не всегда удаётся купить, поэтому достаточно обмотать обычные провода фольгой и подключить экран на GND питания силовой части. Этот трюк часто используют RC моделисты, летающие по FPV.
Видео
 youtube.com/embed/TRWpxrLSjA0?enablejsapi=1&autoplay=0&cc_load_policy=0&cc_lang_pref=&iv_load_policy=1&loop=0&modestbranding=0&rel=1&fs=1&playsinline=0&autohide=2&theme=dark&color=red&controls=1&»/>
youtube.com/embed/TRWpxrLSjA0?enablejsapi=1&autoplay=0&cc_load_policy=0&cc_lang_pref=&iv_load_policy=1&loop=0&modestbranding=0&rel=1&fs=1&playsinline=0&autohide=2&theme=dark&color=red&controls=1&»/>
Источник
Подключение бесколлекторного электродвигателя постоянного тока (BLDC) к Arduino
В этой статье мы рассмотрим управление скоростью вращения бессенсорного бесколлекторного электродвигателя постоянного тока A2212/13T (Sensorless BLDC outrunner motor), часто используемого для конструирования дронов, с помощью ESC (Electronic Speed Controller – электронный контроллер скорости) и платы Arduino.
Необходимые компоненты
Принцип действия BLDC двигателей
Бесколлекторные электродвигатели постоянного тока (BLDC двигатели) в настоящее время часто используются в потолочных вентиляторах и электрических движущихся транспортных средствах благодаря их плавному вращению. В отличие от других электродвигателей постоянного тока BLDC двигатели подключаются с помощью трех проводов, выходящих из них, при этом каждый провод образует свою собственную фазу, то есть получаем трехфазный мотор.
Хотя BLDC относятся к двигателям постоянного тока они управляются с помощью последовательности импульсов. Для преобразования напряжения постоянного тока в последовательность импульсов и распределения их по трем проводникам используется контроллер ESC (Electronic speed controller). В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке. Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Существуют различные типы BLDC двигателей – давайте рассмотрим основные из них.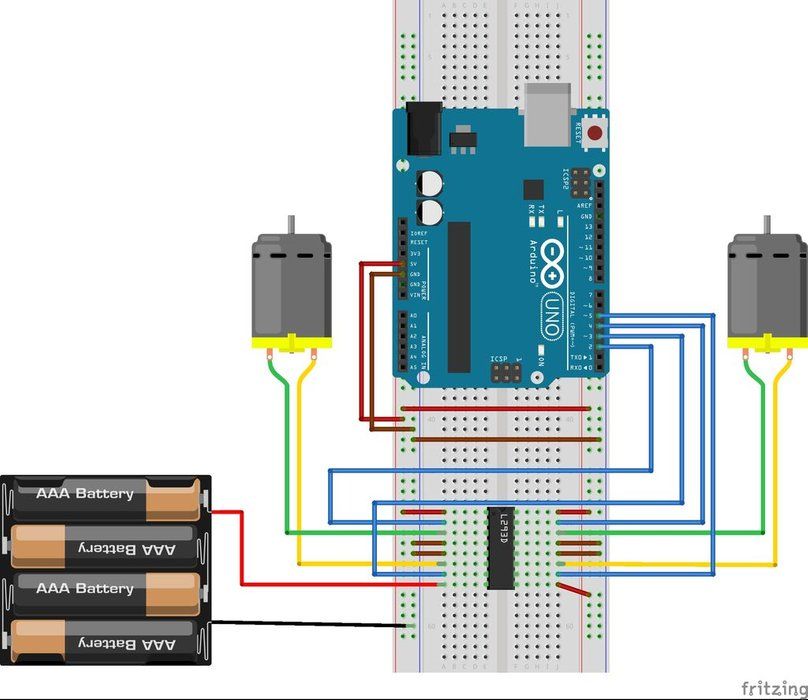 Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.
Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.
Примечание : существует еще такой тип BLDC двигателей как бесстержневой (coreless), который находит применение в «карманных» дронах.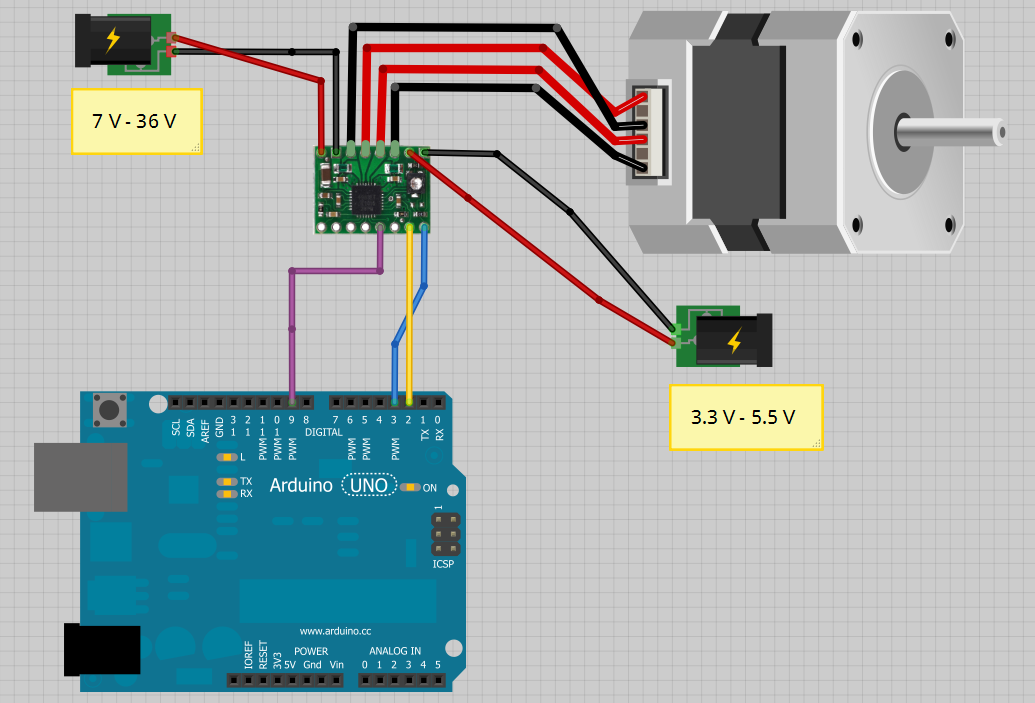 Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
BLDC двигатели с датчиками (Sensor) и без датчиков (Sensorless). Для BLDC двигателей, которые вращаются плавно, без рывков, необходима обратная связь. Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор. Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС.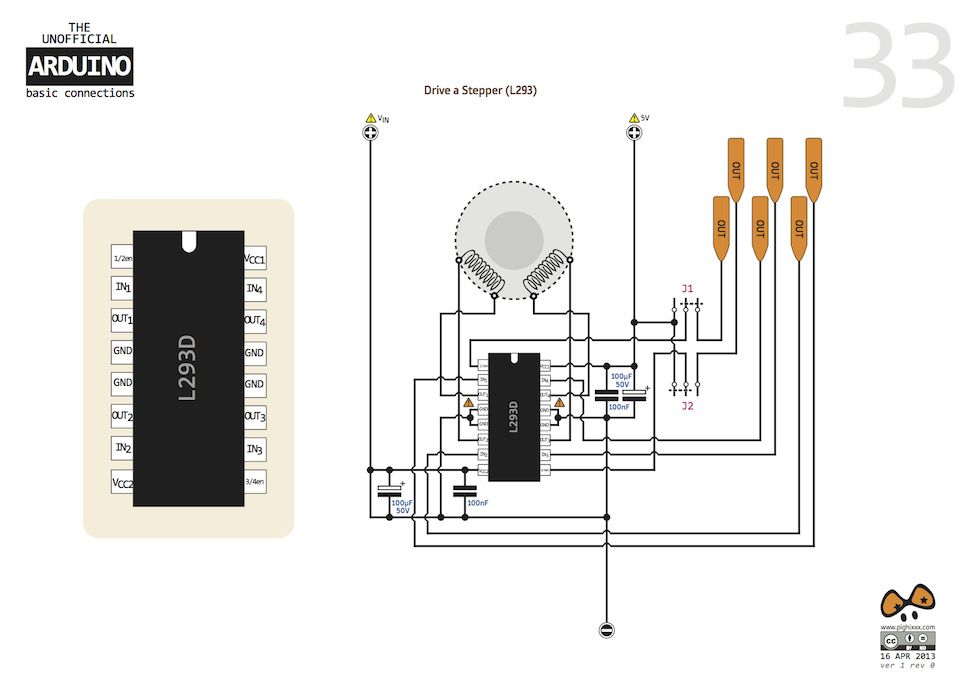 Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Почему дроны и вертолеты используют именно BLDC двигатели?
Сейчас существует множество различных типов дронов – с двумя лопастями, с четырьмя лопастями и т.д. Но все они используют именно BLDC двигатели. Почему именно их, ведь BLDC двигатели стоят дороже чем обычные электродвигатели постоянного тока?
Существует несколько причин для этого:
Зачем нужен контроллер ESC
Как мы уже знаем, для функционирования BLDC двигателей необходим какой-нибудь контроллер, который преобразует напряжение постоянного тока от батарейки в последовательность импульсов, подаваемую в определенном порядке на провода (фазы) двигателя. Этот контроллер называется ESC (Electronic Speed Controller – электронный контроллер скорости). Основной обязанностью данного контроллера является правильная подача питания на провода BLDC двигателя чтобы двигатель вращался в нужном направлении.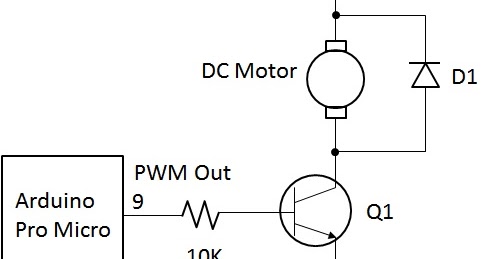 Это осуществляется с помощью считывания обратной ЭДС (back EMF) с каждого провода и подачи питания на катушку в то время когда магнит пересекает ее. Внутри себя контроллер ESC содержит достаточно много разнообразной электроники и при желании вы можете подробно изучить его устройство по соответствующим материалам в сети интернет. Здесь же мы кратко рассмотрим рассмотрим только основные компоненты его конструкции.
Это осуществляется с помощью считывания обратной ЭДС (back EMF) с каждого провода и подачи питания на катушку в то время когда магнит пересекает ее. Внутри себя контроллер ESC содержит достаточно много разнообразной электроники и при желании вы можете подробно изучить его устройство по соответствующим материалам в сети интернет. Здесь же мы кратко рассмотрим рассмотрим только основные компоненты его конструкции.
Некоторые термины, используемые в тематике BLDC и ESC
При изучении принципов работы BLDC двигателей и контроллеров ESC вы можете столкнуться с некоторыми терминами, используемыми в данной тематике. Кратко рассмотрим основные из этих терминов.
Braking (торможение) – определяет насколько быстро BLDC двигатель может остановить свое вращение. Это особенно актуально для летающих средств (дронов, геликоптеров и т.д.) поскольку они вынуждены часто изменять количество оборотов двигателя в минуту чтобы маневрировать в воздухе.
Soft Start (плавный пуск, старт) – эта способность особенно важна для BLDC двигателей когда вращающий момент от него на исполнительный механизм (колесо, винт и т. д.) передается через механизм передач, обычно состоящий из шестерен. Плавный пуск означает, что двигатель не начнет сразу вращаться с максимальной скоростью, а будет увеличивать свою скорость вращения постепенно независимо от того, с какой скоростью нарастает управляющее воздействие. Плавный пуск значительно снижает износ шестерен, входящих в передаточный механизм.
д.) передается через механизм передач, обычно состоящий из шестерен. Плавный пуск означает, что двигатель не начнет сразу вращаться с максимальной скоростью, а будет увеличивать свою скорость вращения постепенно независимо от того, с какой скоростью нарастает управляющее воздействие. Плавный пуск значительно снижает износ шестерен, входящих в передаточный механизм.
Motor Direction (направление вращения двигателя) – обычно направление вращения BLDC двигателей не изменяется в процессе эксплуатации, однако во время сборки и тестирования работы изделия может потребоваться изменение направления вращения двигателя, обычно это можно сделать просто поменяв местами любые два провода двигателя.
Работа схемы
Схема подключения BLDC двигателя и контроллера ESC к плате Arduino представлена на следующем рисунке.
Как видите, схема достаточно проста. Контроллеру ESC необходим источник питания с напряжением 12V и током как минимум 5A. Для питания схемы можно использовать адаптер или Li-Po батарейку.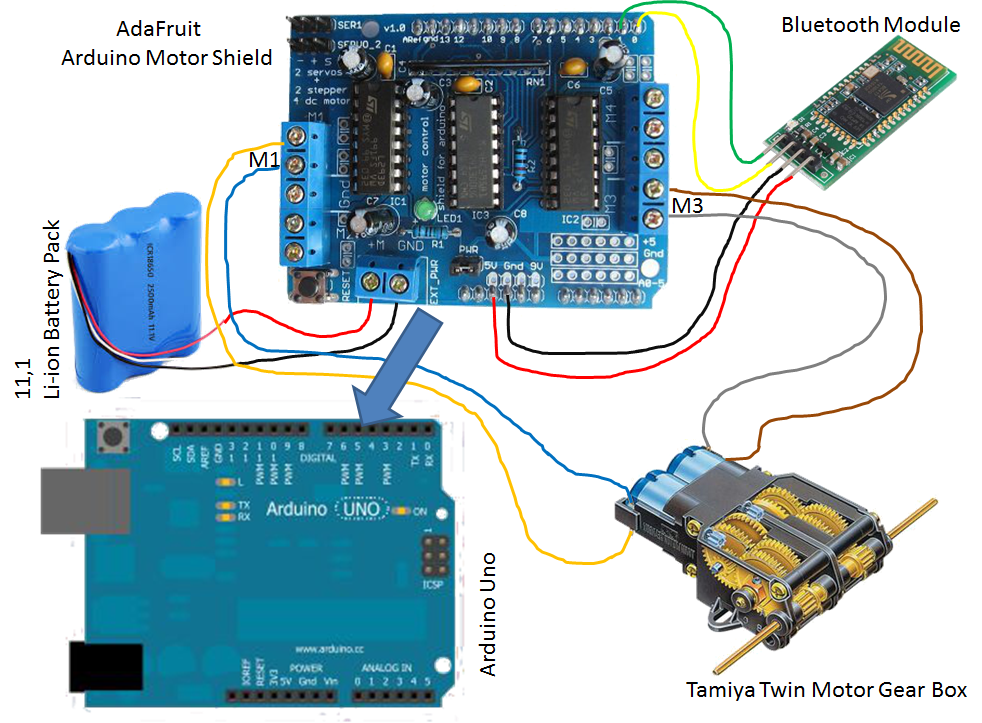 Три фазы (провода) BLDC двигателя необходимо подсоединить к трем выходным проводам контроллера ESC – неважно в каком порядке.
Три фазы (провода) BLDC двигателя необходимо подсоединить к трем выходным проводам контроллера ESC – неважно в каком порядке.
Предупреждение : у некоторых контроллеров ESC нет выходных проводов, в этом случае вам необходимо будет припаивать провода от BLDC двигателя к контактам контроллера ESC. Обязательно изолируйте эти оголенные места (пайки) с помощью изоляционной ленты потому что через эти провода возможно протекание достаточно больших токов и любое короткое замыкание может привести к повреждению двигателя и контроллера ESC.
Схема BEC (Battery Eliminator circuit) в контроллере ESC будет самостоятельно обеспечивать (регулировать) постоянное напряжение +5V, поэтому его можно непосредственно использовать для питания платы Arduino. Для управления скоростью вращения двигателя в схеме используется потенциометр, подключенный к контакту A0 платы Arduino.
Внешний вид собранной конструкции показан на следующем рисунке.
Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы рассмотрим только его основные фрагменты.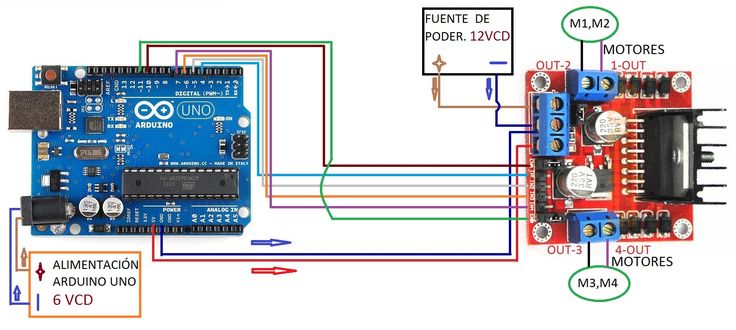
Для управления BLDC двигателем мы будем формировать ШИМ сигнал с частотой 50 Гц и изменяемым от 0 до 100% коэффициентом заполнения. Значение коэффициента заполнения будет управляться с помощью потенциометра. То есть, вращая потенциометр, мы будем управлять скоростью вращения двигателя. Как уже указывалось, управление BLDC двигателем очень похоже на управление сервомотором с помощью ШИМ 50 Гц, поэтому в данном случае мы будем использовать ту же самую библиотеку, которую использовали для управления сервомотором. Если вы начинающий в изучении платформы Arduino, то перед дальнейшим прочтением данной статьи рекомендуем вам изучить принципы формирования ШИМ сигнала в Arduino и подключение сервомотора к плате Arduino.
ШИМ сигнал можно генерировать только на тех цифровых контактах платы Arduino, которые обозначены символом
. В нашей схеме мы будем управлять контроллером ESC с контакта 9 платы Arduino, поэтому следующей командой мы прикрепим контроллер ESC к этому контакту:
Источник
Как запустить бесколлекторный двигатель на arduino
Бесколлекторные моторы
Обзор бесколлекторных моторов для Arduino
Бесколлекторные моторы (рис. 1) появились сравнительно недавно и были созданы с целью оптимизации электродвигателей постоянного тока. Бесколлекторные моторы питаются трехфазным переменным током. Они эффективно работают в более широком диапазоне оборотов и имеют более высокий КПД. При этом конструкция двигателя проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Поэтому они практически не изнашиваются.
1) появились сравнительно недавно и были созданы с целью оптимизации электродвигателей постоянного тока. Бесколлекторные моторы питаются трехфазным переменным током. Они эффективно работают в более широком диапазоне оборотов и имеют более высокий КПД. При этом конструкция двигателя проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Поэтому они практически не изнашиваются.
По конструкции бесколлекторные моторы делятся на две группы: inrunner и outrunner. Двигатели inrunner имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Двигатели outrunner имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами.
Коммутация в бесколлекторном двигателе (БД) осуществляется и контролируется с помощью электроники.
Контроллеры бесколлекторных моторов (ESC регуляторы)
Для управления бесколлекторными моторами используют специальные контроллеры — ESC (Electric speed controller — электронный контроллер скорости) регуляторы (рис. 3).
3).
Рис. 3. ESC регуляторы
Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды. Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно. Попеременное включение/выключение фаз поддерживает вращение мотора. За переключением фаз следит микроконтроллер регулятора. Функциональная схема ESC регулятора показана на рис. 4
Рис. 4. Функциональная схема ESC регулятора
Подключение к плате Arduino
Схема подключения бесколлекторного двигателя с ESC-регулятором к плате Arduino показана на рис.5. Для подключения регулятора к плате Arduino используется 2 провода:
Красный провод регулятора является не входом, выходом с напряжением +5В, который можно использовать для питания платы Arduino.
Показания потенциометра будем использовать для управления скоростью мотора.
Рис. 5. Подключение бесколлекторного двигателя с ESC-регулятором к плате Arduino
Для управления регулятором будем использовать Arduino-библиотеку Servo. Минимальные и максимальные значения управляющего сигнала 800 мксек и 2300 мксек.
Содержимое скетча представлено в листинге 1.
После загрузки скетча на плату Arduino видим что мотор не запускается и не реагирует на повороты потенциометра. Регулятор необходимо откалибровать, чтобы он знал минимальные и максимальное значения. Для этого перед подачей питания на регулятор, выставляем потенциометр в максимальное значение. Подаем питание. Слышим «пиканье» двигателя. Переводим потенциометр в минимальное значение, слышим 3 «пика». Регулятор откалиброван. Теперь поворотом потенциометра можем регулировать скорость двигателя.
Пример использования
В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino. Нам потребуются следующие компоненты:
Плата Arduino Uno – 1;
Плата прототипирования – 1;
Мотор бесколлекторный – 1;
Потенциометр 10 кОм – 1;
Блок питания 12 В – 1;
Для калибровки в процедуре setup() производим эмуляцию перевода потенциометра м максимальное и минимальное положение. Содержимое скетча показано в листинге 2.
Содержимое скетча показано в листинге 2.
После запуска Arduino в процедуре setup() происходит калибровка регулятора, и в процедуре loop() мотор крутится со скоростью, соответствующей положению потенциометра.
Часто задаваемые вопросы
1. Не запускаются моторы
Проверьте подключение моторов к ESC-регулятору, ESC-регулятора к блоку питания и Arduino.
Мир микроконтроллеров
Популярное
Подключение бесколлекторного электродвигателя постоянного тока (BLDC) к Arduino
В настоящее время наблюдается небывалый интерес к конструированию различных летающих механизмов – дронов, планеров, глайдеров, вертолетов и т.д. Сейчас их можно легко сконструировать самостоятельно благодаря большому количеству материалов по ним в сети интернет. Все эти летающие механизмы используют для своего движения так называемые бесщёточные (бесколлекторные) электродвигатели постоянного тока (BLDC — Brushless DC Motor). Что представляют собой подобные двигатели? Почему именно они сейчас используются в различных летающих дронах? Как правильно купить подобный двигатель и подключить его к микроконтроллеру? Что такое ESC и почему мы будем его использовать? Ответы на все эти вопросы вы найдете в данной статье.
В этой статье мы рассмотрим управление скоростью вращения бессенсорного бесколлекторного электродвигателя постоянного тока A2212/13T (Sensorless BLDC outrunner motor), часто используемого для конструирования дронов, с помощью ESC (Electronic Speed Controller – электронный контроллер скорости) и платы Arduino.
Необходимые компоненты
Принцип действия BLDC двигателей
Бесколлекторные электродвигатели постоянного тока (BLDC двигатели) в настоящее время часто используются в потолочных вентиляторах и электрических движущихся транспортных средствах благодаря их плавному вращению. В отличие от других электродвигателей постоянного тока BLDC двигатели подключаются с помощью трех проводов, выходящих из них, при этом каждый провод образует свою собственную фазу, то есть получаем трехфазный мотор.
Хотя BLDC относятся к двигателям постоянного тока они управляются с помощью последовательности импульсов. Для преобразования напряжения постоянного тока в последовательность импульсов и распределения их по трем проводникам используется контроллер ESC (Electronic speed controller). В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке. Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке. Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Существуют различные типы BLDC двигателей – давайте рассмотрим основные из них. Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.
А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.
Примечание : существует еще такой тип BLDC двигателей как бесстержневой (coreless), который находит применение в «карманных» дронах. Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
BLDC двигатели с датчиками (Sensor) и без датчиков (Sensorless). Для BLDC двигателей, которые вращаются плавно, без рывков, необходима обратная связь. Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор. Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС. Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор. Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС. Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Почему дроны и вертолеты используют именно BLDC двигатели?
Сейчас существует множество различных типов дронов – с двумя лопастями, с четырьмя лопастями и т.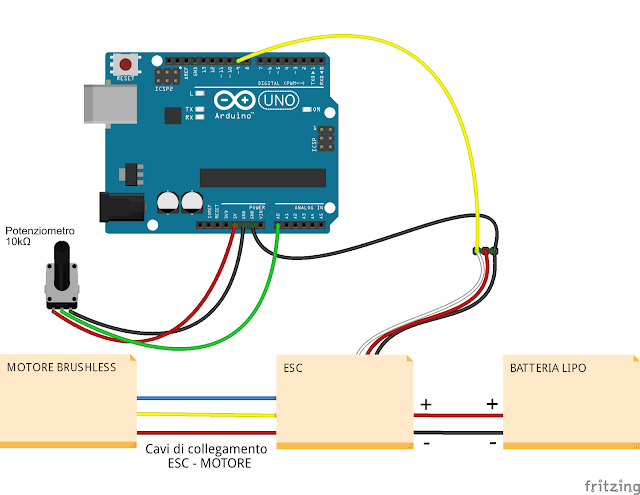 д. Но все они используют именно BLDC двигатели. Почему именно их, ведь BLDC двигатели стоят дороже чем обычные электродвигатели постоянного тока?
д. Но все они используют именно BLDC двигатели. Почему именно их, ведь BLDC двигатели стоят дороже чем обычные электродвигатели постоянного тока?
Существует несколько причин для этого:
Зачем нужен контроллер ESC
Как мы уже знаем, для функционирования BLDC двигателей необходим какой-нибудь контроллер, который преобразует напряжение постоянного тока от батарейки в последовательность импульсов, подаваемую в определенном порядке на провода (фазы) двигателя. Этот контроллер называется ESC (Electronic Speed Controller – электронный контроллер скорости). Основной обязанностью данного контроллера является правильная подача питания на провода BLDC двигателя чтобы двигатель вращался в нужном направлении. Это осуществляется с помощью считывания обратной ЭДС (back EMF) с каждого провода и подачи питания на катушку в то время когда магнит пересекает ее. Внутри себя контроллер ESC содержит достаточно много разнообразной электроники и при желании вы можете подробно изучить его устройство по соответствующим материалам в сети интернет. Здесь же мы кратко рассмотрим рассмотрим только основные компоненты его конструкции.
Некоторые термины, используемые в тематике BLDC и ESC
При изучении принципов работы BLDC двигателей и контроллеров ESC вы можете столкнуться с некоторыми терминами, используемыми в данной тематике. Кратко рассмотрим основные из этих терминов.
Braking (торможение) – определяет насколько быстро BLDC двигатель может остановить свое вращение. Это особенно актуально для летающих средств (дронов, геликоптеров и т.д.) поскольку они вынуждены часто изменять количество оборотов двигателя в минуту чтобы маневрировать в воздухе.
Soft Start (плавный пуск, старт) – эта способность особенно важна для BLDC двигателей когда вращающий момент от него на исполнительный механизм (колесо, винт и т.д.) передается через механизм передач, обычно состоящий из шестерен. Плавный пуск означает, что двигатель не начнет сразу вращаться с максимальной скоростью, а будет увеличивать свою скорость вращения постепенно независимо от того, с какой скоростью нарастает управляющее воздействие. Плавный пуск значительно снижает износ шестерен, входящих в передаточный механизм.
Плавный пуск значительно снижает износ шестерен, входящих в передаточный механизм.
Motor Direction (направление вращения двигателя) – обычно направление вращения BLDC двигателей не изменяется в процессе эксплуатации, однако во время сборки и тестирования работы изделия может потребоваться изменение направления вращения двигателя, обычно это можно сделать просто поменяв местами любые два провода двигателя.
Работа схемы
Схема подключения BLDC двигателя и контроллера ESC к плате Arduino представлена на следующем рисунке.
Как видите, схема достаточно проста. Контроллеру ESC необходим источник питания с напряжением 12V и током как минимум 5A. Для питания схемы можно использовать адаптер или Li-Po батарейку. Три фазы (провода) BLDC двигателя необходимо подсоединить к трем выходным проводам контроллера ESC – неважно в каком порядке.
Предупреждение : у некоторых контроллеров ESC нет выходных проводов, в этом случае вам необходимо будет припаивать провода от BLDC двигателя к контактам контроллера ESC.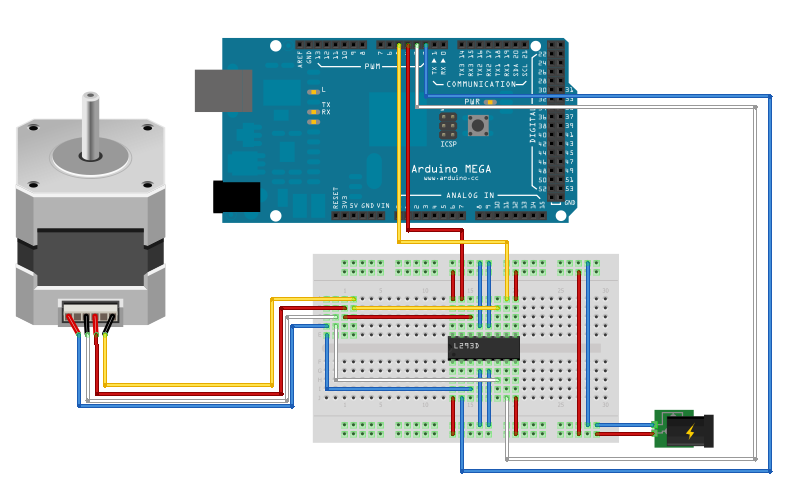 Обязательно изолируйте эти оголенные места (пайки) с помощью изоляционной ленты потому что через эти провода возможно протекание достаточно больших токов и любое короткое замыкание может привести к повреждению двигателя и контроллера ESC.
Обязательно изолируйте эти оголенные места (пайки) с помощью изоляционной ленты потому что через эти провода возможно протекание достаточно больших токов и любое короткое замыкание может привести к повреждению двигателя и контроллера ESC.
Схема BEC (Battery Eliminator circuit) в контроллере ESC будет самостоятельно обеспечивать (регулировать) постоянное напряжение +5V, поэтому его можно непосредственно использовать для питания платы Arduino. Для управления скоростью вращения двигателя в схеме используется потенциометр, подключенный к контакту A0 платы Arduino.
Внешний вид собранной конструкции показан на следующем рисунке.
Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы рассмотрим только его основные фрагменты.
Для управления BLDC двигателем мы будем формировать ШИМ сигнал с частотой 50 Гц и изменяемым от 0 до 100% коэффициентом заполнения. Значение коэффициента заполнения будет управляться с помощью потенциометра. То есть, вращая потенциометр, мы будем управлять скоростью вращения двигателя. Как уже указывалось, управление BLDC двигателем очень похоже на управление сервомотором с помощью ШИМ 50 Гц, поэтому в данном случае мы будем использовать ту же самую библиотеку, которую использовали для управления сервомотором. Если вы начинающий в изучении платформы Arduino, то перед дальнейшим прочтением данной статьи рекомендуем вам изучить принципы формирования ШИМ сигнала в Arduino и подключение сервомотора к плате Arduino.
То есть, вращая потенциометр, мы будем управлять скоростью вращения двигателя. Как уже указывалось, управление BLDC двигателем очень похоже на управление сервомотором с помощью ШИМ 50 Гц, поэтому в данном случае мы будем использовать ту же самую библиотеку, которую использовали для управления сервомотором. Если вы начинающий в изучении платформы Arduino, то перед дальнейшим прочтением данной статьи рекомендуем вам изучить принципы формирования ШИМ сигнала в Arduino и подключение сервомотора к плате Arduino.
ШИМ сигнал можно генерировать только на тех цифровых контактах платы Arduino, которые обозначены символом
. В нашей схеме мы будем управлять контроллером ESC с контакта 9 платы Arduino, поэтому следующей командой мы прикрепим контроллер ESC к этому контакту:
Источник
Видео
Уроки Arduino — управление бесколлекторным мотором
Проект на Arduino — 013 — Бесколлекторный мотор Управление с помощью Arduino
как подключить безколлекторный двигатель A2212 5T ESC 30A
#ArduBlock 2. 0 — Бесколлекторный мотор — Старт, обороты, время, разгон!
0 — Бесколлекторный мотор — Старт, обороты, время, разгон!
Управление моторами с Arduino
Запускаем бесколлекторный мотор из жесткого диска с помощью ардуино своими руками DIY без драйвера!
Бесколлекторный двигатели из компьютера и ардуино
Подключение бесколлекторного мотора
Подключаем мотор-колесо к контроллеру Arduino
Обзор сервотестера. Подключение к серве и бесколлекторному мотору.
Как подключит трехфазный двигатель к ардуино
Содержание
- Управление щёточными моторами с Arduino
- Мосфет
- Реле и мосфет
- Специальный драйвер
- Моторы переменного тока
- Библиотеки
- Помехи и защита от них
- Индуктивный выброс напряжения
- Помехи от щёток
- Помехи по питанию, просадка
- Разделение питания
- Экранирование
- Видео
- Arduino управление частотным преобразователем
- Что такое Arduino?
- Что нужно знать прежде, чем начинать работать с Ардуино?
- Как начать проектировать систему управления 3-х фазным асинхронным мотором?
- Почему люди используют Arduino для управления трехфазным асинхронным мотором?
- Преимущества применения частного преобразователя на микроконтроллере Arduino
- Управление оборотами однофазного асинхронного двигателя с помощью Arduino
- Инженерно-техническое творчество
- Заключение
- Подключение моторчика к Ардуино
- Управление двигателем на Ардуино
- Как подключить моторчик к Arduino
- Скетч.
 Подключение мотора напрямую
Подключение мотора напрямую - Пояснения к коду:
- Скетч. Подключение мотора через транзистор
- Пояснения к коду:
- Скетч. Подключение мотора через драйвер
- Видео
 Подключение мотора напрямую
Подключение мотора напрямуюУправление щёточными моторами с Arduino
Как вы знаете, никакую нагрузку мощнее светодиода нельзя подключать к Ардуино напрямую, особенно моторчики. Ардуино, да и вообще любой микроконтроллер – логическое устройство, которое может давать только логические сигналы другим железкам, а те уже могут управлять нагрузкой. Кстати, урок по управлению мощной нагрузкой постоянного и переменного тока у меня тоже есть. “Драйвером” мотора могут быть разные железки, рассмотрим некоторые из них.
При помощи двойного модуля реле (или просто двух реле) можно включать мотор в одну или другую сторону, а также выключать:
Купить модуль реле можно на Aliexpress.
Мосфет
Вместо “голого” мосфета можно использовать готовый китайский модуль:
Купить мосфет модуль можно на Aliexpress.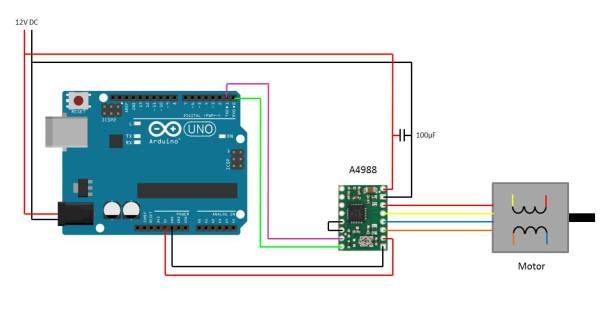
Реле и мосфет
Если объединить реле и мосфет – получим весьма колхозную, но рабочую схему управления скоростью и направлением мотора:
Специальный драйвер
Лучше всего управлять мотором при помощи специального драйвера, они бывают разных форм и размеров и рассчитаны на разное напряжение и ток, но управляются практически одинаково. Рассмотрим основные драйверы с китайского рынка:
| Драйвер | Vmot | Ток (пик) | Стоимость | Aliexpress |
| L298N | 4-50V | 1A (2A) | 100р | Купить |
| MX1508 | 2-9.6V | 1.5A (2.5A) | 20р | Купить |
| TA6586 | 3-14V | 5A (7A) | 100р (чип 30р) | Купить, купить, купить чип |
| L9110S | 2.5-12V | 0. 8A (1.5A) 8A (1.5A) | 50р | Купить |
| TB6612 | 4.5-13.5V | 1.2A (3A) | 80р | Купить |
| BTS7960 | 5.5-27V | 10A (43A) | 300р | Купить |
| Большой | 3-36V | 10A (30A) | 700р | Купить |
Остальные драйверы смотри у меня вот тут. Схемы подключения и таблицы управления:
Моторы переменного тока
Мотором переменного тока (220V от розетки) можно управлять при помощи диммера на симисторе, как в уроке про управление нагрузкой.
Библиотеки
У меня есть удобная библиотека для управления мотором – GyverMotor, документацию можно почитать вот здесь. Особенности библиотеки:
Помехи и защита от них
Индуктивный выброс напряжения
Мотор – это индуктивная нагрузка, которая в момент отключения создаёт индуктивные выбросы. У мотора есть щетки, которые являются источником искр и помех за счёт той же самой индуктивности катушки. Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства.
Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства.
Отсечь индуктивный выброс с мотора можно при помощи самого обычного диода, чем мощнее мотор, тем мощнее нужен диод, то есть на более высокое напряжение и ток. Диод ставится встречно параллельно мотору, и чем ближе к корпусу, тем лучше. Точно таким же образом рекомендуется поступать с электромагнитными клапанами, соленоидами, электромагнитами и вообще любыми другими катушками. Логично, что диод нужно ставить только в том случае, если мотор или катушка управляется в одну сторону. Важные моменты:
Помехи от щёток
Искрящиеся щетки мотора, особенно старого и разбитого, являются сильным источником электромагнитных помех, и здесь проблема решается установкой керамических конденсаторов с ёмкостью 0. 1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор.
1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор.
Помехи по питанию, просадка
Мотор потребляет ток не очень равномерно, особенно во время разгона или в условиях переменной нагрузки на вал, что проявляется в виде просадок напряжения по питанию всей схемы. Беды с питанием решаются установкой ёмких электролитических конденсаторов по питанию, логично что ставить их нужно максимально близко к драйверу, то есть до драйвера. Напряжение должно быть выше чем напряжение питания, а ёмкость уже подбирается по факту. Начать можно с 470 мкф и повышать, пока не станет хорошо.
Разделение питания
Если описанные выше способы не помогают – остаётся только одно: разделение питания. Отдельный малошумящий хороший источник на МК и сенсоры/модули, и отдельный – для силовой части, в том числе мотора. Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Экранирование
В отдельных случаях критичными являются даже наводки от питающих проводов моторов, особенно при управлении ШИМ мощными моторами и управлении мощными шаговиками в станках. Такие наводки могут создавать сильные помехи для работающих рядом чувствительных электронных компонентов, на аналоговые цепи, наводить помехи на линии измерения АЦП и конечно же на радиосвязь. Защититься от таких помех можно при помощи экранирования силовых проводов: экранированные силовые провода не всегда удаётся купить, поэтому достаточно обмотать обычные провода фольгой и подключить экран на GND питания силовой части. Этот трюк часто используют RC моделисты, летающие по FPV.
Видео
 youtube.com/embed/TRWpxrLSjA0?enablejsapi=1&autoplay=0&cc_load_policy=0&cc_lang_pref=&iv_load_policy=1&loop=0&modestbranding=0&rel=1&fs=1&playsinline=0&autohide=2&theme=dark&color=red&controls=1&»/>
youtube.com/embed/TRWpxrLSjA0?enablejsapi=1&autoplay=0&cc_load_policy=0&cc_lang_pref=&iv_load_policy=1&loop=0&modestbranding=0&rel=1&fs=1&playsinline=0&autohide=2&theme=dark&color=red&controls=1&»/>
Источник
Arduino управление частотным преобразователем
Что такое Arduino?
Это небольшое электронное устройство, включающее в себя одну печатную плату, которая способна управлять различными приборами и оборудованием (в том числе электродвигателями), осуществлять приём и передачу данных.
Реальный старт в познании аппаратно-программных средств построения простых систем автоматики. Она очень проста в освоении и не требует почти никаких предварительных условий, кроме пытливого ума.
Имеет ценность в качестве учебного пособия для неофитов, и в качестве инструмента реализации проекта для любителей, и как инструмент прототипирования для профессионалов.
Для неофитов здесь все покажется новым. Для любителей Arduino – устройство применения своих знаний и возможность сосредоточиться на битах, которые являются новыми для них, или сложными для восприятия. Профессионалы используют устройство ради получения прототипа проекта с наименьшей стоимостью реализации заказного оборудования и прошивки.
Для любителей Arduino – устройство применения своих знаний и возможность сосредоточиться на битах, которые являются новыми для них, или сложными для восприятия. Профессионалы используют устройство ради получения прототипа проекта с наименьшей стоимостью реализации заказного оборудования и прошивки.
В любом случае, пользователь получит хорошее представление о программировании на C. Это отличная отправная точка.
Что нужно знать прежде, чем начинать работать с Ардуино?
Особых знаний точно не потребуется, но необходимо уметь читать и следовать инструкциям. Они предназначены для того, чтобы познакомить начинающих с электроникой и программированием. Большинство молодых людей уже в возрасте от 12 лет и старше легко овладевают методику.
Рекомендуется покупать качественный комплект с хорошим выбором деталей в комплекте с учебным материалом, необходимымдля получения навыков.
Что нужно еще помнить? Светодиоды не загораются, если установлены с неправильной полярностью. Установленные диоды в обратном направлении могут привести к короткому замыканию. Статическое электричество рук может повредить или уничтожить интегральные схемы и транзисторы.
Установленные диоды в обратном направлении могут привести к короткому замыканию. Статическое электричество рук может повредить или уничтожить интегральные схемы и транзисторы.
Никогда не работайте с оборудованием, подключенным к электросети из-за риска поражения электрическим током.
Как начать проектировать систему управления 3-х фазным асинхронным мотором?
Изначально посмотреть видео, где продемонстрирована реализация проекта. После просмотра видео вы будете в состоянии сделать маленький проект в Arduino.
Почему люди используют Arduino для управления трехфазным асинхронным мотором?
Трехфазный асинхронный двигатель является самым эффективным способом, когда необходимо преобразовать электроэнергию в крутящий момент. Крутящий момент преобразуется в давление, скорость движения влияет в свою очередь на расход.
Наиболее эффективно выполняется регулировка вращения электродвигателя методом изменения частоты сети питания. Самое простое, это сделать посредством частотного преобразователя на микроконтроллере.
Arduino — торговая марка аппаратно-программных средств построения простых систем автоматики и робототехники, ориентированная на непрофессиональных пользователей.
Понижение сетевого напряжения осуществляетсяпри помощи трансформатора, а выпрямление – диодного моста. Микроконтроллер работает в режиме генератора переменной частоты, коммутирует ключ на транзисторах. Переменное напряжение повышается при помощи второго трансформатора и подается на обмотки питания электродвигателя.
Частоту коммутации (а также скорость вращения вала мотора) задаёт переменный резистор в широком диапазоне. Если применить переключатель и постоянные резисторы, можно управлять частотой ступенчато. Подключив к одному из входов микроконтроллера Arduino датчик тока, можно использовать программу, которая автоматически будет снижать скорость вращения вала при нежелательном повышении нагрузки.
Программа посредством специальных кодов включает преобразователь, считывает величину напряжения и регулирует его.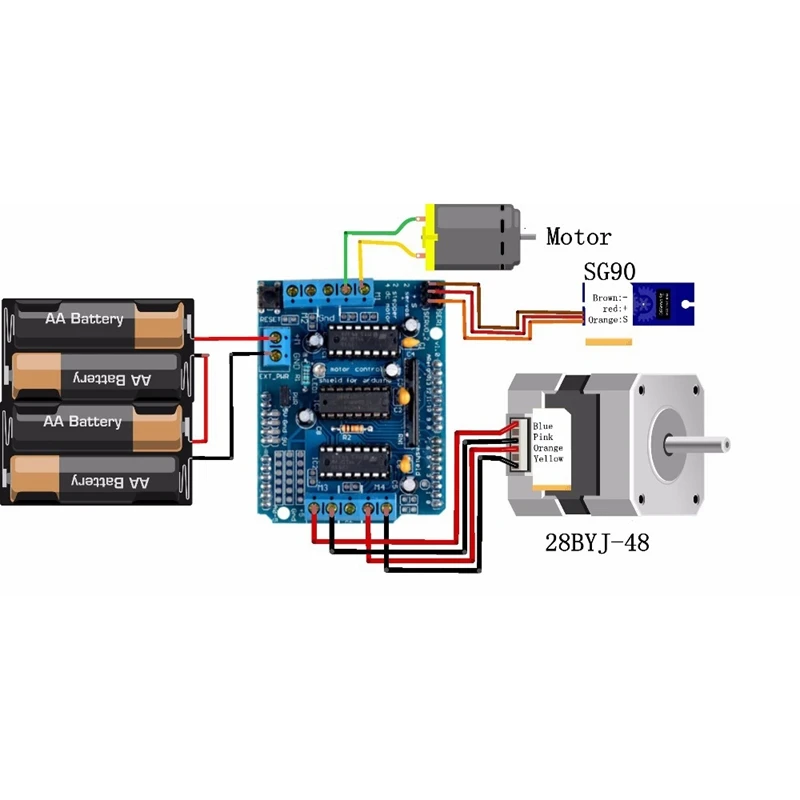 Далее отдаёт команду переходить к библиотеке передатчика для генерирования кода и его передачи. По мере роста нагрузки, рабочее напряжение компенсируется и регулируется. Для этого применяется два способа: установка большого конденсатора для запасной энергии либо повышающего преобразователя. Выход при этом необходимо контролировать стабилизатором.
Далее отдаёт команду переходить к библиотеке передатчика для генерирования кода и его передачи. По мере роста нагрузки, рабочее напряжение компенсируется и регулируется. Для этого применяется два способа: установка большого конденсатора для запасной энергии либо повышающего преобразователя. Выход при этом необходимо контролировать стабилизатором.
В этом заключается основной принцип взаимодействия между электронными устройствами, движком и платой.
Преимущества применения частного преобразователя на микроконтроллере Arduino
Регулировка оборотами однофазного асинхронного мотора с помощью микроконтроллера обеспечивает значительную экономию затрат на электроэнергию при частичной нагрузке. Поскольку потребление электричества и скорость вращения вала мотора прямо пропорциональные величины, экономия может быть значительной при правильном применении. Для примера рассмотрим систему, в которой используется насос в установке очистки сточных вод.
Небольшой частной фирме необходимо прокачивать яму лишь перед большим дождём или при увеличенном использовании канализации (праздничные выходные) и не нужны полные возможности насоса.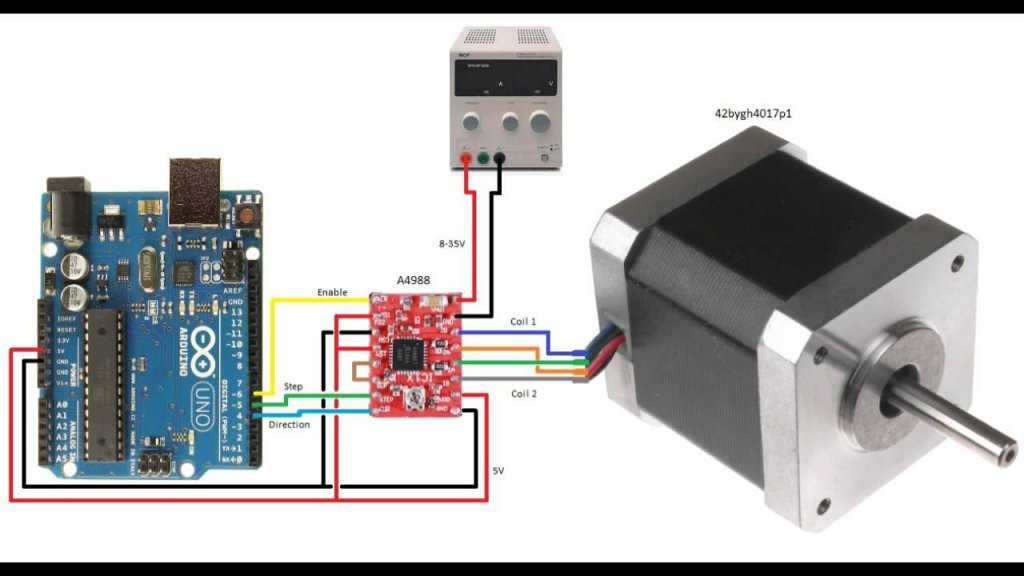 Если насос будет постоянно работать, компания будет тратить значительное количество электроэнергии за работу насоса на полную мощность.Суть заключается ещё в том, чтобы в зависимости от давления в системе канализации и водоотведения, у насоса плавно набиралисьобороты и поддерживалось необходимое давление в системес регулированием частоты вращения движка.
Если насос будет постоянно работать, компания будет тратить значительное количество электроэнергии за работу насоса на полную мощность.Суть заключается ещё в том, чтобы в зависимости от давления в системе канализации и водоотведения, у насоса плавно набиралисьобороты и поддерживалось необходимое давление в системес регулированием частоты вращения движка.
Со школьной скамьи известно простое уравнение:
Мощность = крутящий момент х угловая скорость.
Для конкретной конфигурации мотора мощность – величина постоянная. Так как угловая скорость увеличивается, крутящий момент уменьшается. Таким образом, крутящий момент больше на низких оборотах, и наоборот.
За счет использования Arduino, таким образом, можно замедлить мотор насоса до 50%, и все равно прокачивать большой объем воды, и образом сэкономить более 50% от необходимого электричества. Экономия будет просто астрономической при частичном или регулярном использовании преобразователя.
Управление оборотами однофазного асинхронного двигателя с помощью Arduino
Для начала необходимо попытаться больше узнать про особенности двигателя.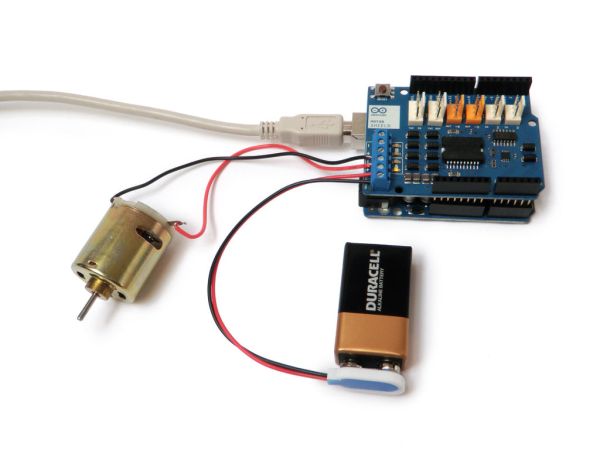 Они бывают разные и способы управления ими тоже разные.
Они бывают разные и способы управления ими тоже разные.
Существует три способа регулирования частоты вращения асинхронного мотора:
Частотник нужен для обеспечения нормального управления процессами, которые требуют регулирования. Пускатели (УПП, софт-стартеры) уменьшают ударные нагрузки от сетевого напряжения с помощью фазо-импульсного (ФИУ) способа подачи питания на электродвигатель. Словно диммер, они обеспечивают плавное нарастание тока потребления электродвигателя и препятствуют развитию КЗ в питающей сети при пуске.
После разгона двигателя от УПП, двигатель просто полностью переходит на питание от сети, так как УПП синхронизировано с сетью. Использовать ФИУ для полноценного управления электродвигателем не получится, лишь в отдельных случаях это может «прокатить».
Если ПЧ для вас дорогое удовольствие, то можно попробовать классический метод регулировки подачи воздуха – управление шиберной задвижкой от сервопривода. Здесь уже упор делается на механику. Собственно сам электродвигатель при таком способе всегда будет работать в номинале.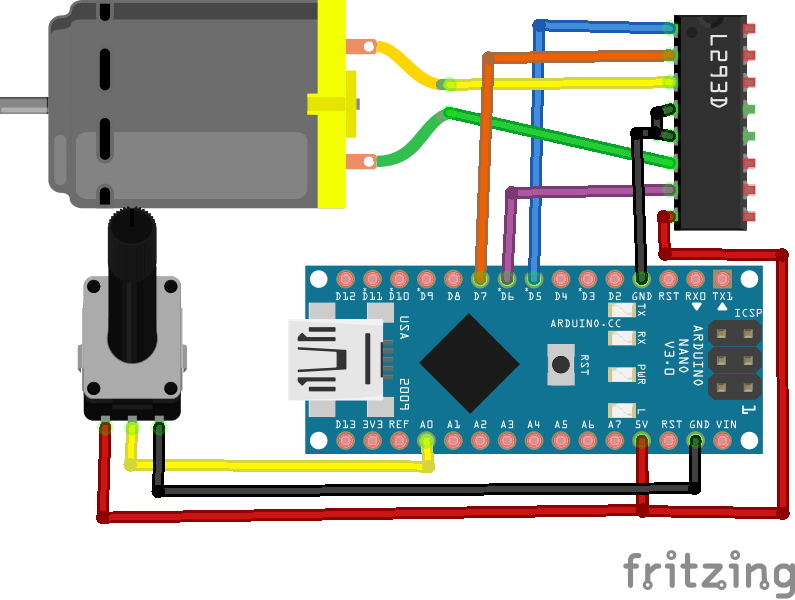
Инженерно-техническое творчество
Как сделать частотный преобразователь своими руками? Можно прошагать весь Интернет для того чтобы найти лучшие источники информации по теме поделок и не найти ни одного конкретного ответа на свой вопрос, так как каждый проект требует разных компонентов, но есть общий принцип проектирования. Вот он вам пригодится.
Начнем с определения того, что вы хотите по вашей схеме сделать. Разделите задачу на простые задачки по каждому электронному компоненту, которые можно завершить. В ходе исследования вы встретите целый ряд конструкций, это поможет увидеть достоинства и недостатки каждой из схем, которую вы считаете интересной и связанной с вашей проблемой.
Начинать лучше с моторов и работать в обратном направлении к созданию процессора управления электродвигателями. Вы должны выбрать двигатель, исходя из требуемого вращающего момента, скорости, требования к питанию.
Это электротехническая работа, которая требует интенсивного познания электричества.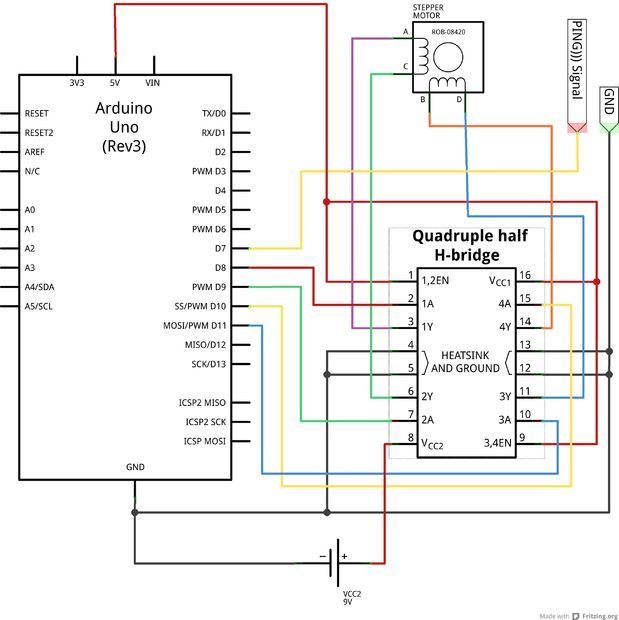 Во многом зависит от того, как глубоко вы хотите познать теорию.Совсем не достаточно знать компоненты. Проектирование схемы заключается в вычислениях напряжений и токов, выборе нужных деталей. Результатом проектирования является составление спецификации оборудования и материалов.Знания о точныхэлементах спецификации, которые вам необходимы, приходят лишь с опытом.
Во многом зависит от того, как глубоко вы хотите познать теорию.Совсем не достаточно знать компоненты. Проектирование схемы заключается в вычислениях напряжений и токов, выборе нужных деталей. Результатом проектирования является составление спецификации оборудования и материалов.Знания о точныхэлементах спецификации, которые вам необходимы, приходят лишь с опытом.
Вам нужно будет сделать анализ цепи для определения необходимых компонентов вашей спецификации, включая мин./макс. расчетов по допускам и температуре. На основании исходных данных электродвигателя составляется блок-схема и подбираются электронные компоненты. В качестве примера представляем перечень основных элементов самодельного электропривода5-200Гц (10-400Гц):
| п. п. | Название элементов | Количество, шт. |
| 1 | Силовой модуль IRAMS10UP60B со встроенным драйвером | 1 |
| 2 | BB-102 Макетная плата для монтажа без пайки | 1 |
| 3 | BBJ-65 Комплект цветных монтажных перемычек MM для макетных плат без пайки | 1 |
| 4 | Контроллер ATmega48 | 1 |
| 5 | Трансформатор 220/12 В 300 Вт | 1 |
Просмотрите для всех элементов технические характеристики, указанные производителем. Выполните тепловые расчеты и продумайте охлаждение и меры теплоотвода по мере необходимости. Разумеется, это требует многолетнего опыта, чтобы получить хороший результат. Вы также можете воспользоваться советами и рекомендациями более опытных электриков.
Выполните тепловые расчеты и продумайте охлаждение и меры теплоотвода по мере необходимости. Разумеется, это требует многолетнего опыта, чтобы получить хороший результат. Вы также можете воспользоваться советами и рекомендациями более опытных электриков.
В итоге у вас получится макет-тренажёр.
Следует убедиться, что двигатель надежно установлен, дабы он не ринулся «гулять». Тестирование собранного макета покажет, насколько схема позволит вам набрать скорость электродвигателя, повернуть всё вспять или остановить систему. Вы можете использовать переключатели для этого тренажера. Будьте готовы к тому, что придётся переделывать систему. Только не стоит изобретать колесо. Мудрость– это правильно суметь воспользоваться тем, что другие освоили или даже усовершенствовать чужое изобретение.
Попробуйте разные компоненты в цепи. Используйте мультиметр, чтобы получить результаты. Через какое-то время вы сможете убежденно сказать, почему вы используете резистор 2 Вт вместо 0,25 Вт.
Большинство полупроводниковых компаний продают оценочные платы вместе со своей продукцией. Купите не одну, побольше для учёбы. Инженерное дело – это делать много ошибок, за исключением удара электрическим током или пожара.
Для каждого подэтапа сделайте схемку и получите результат. Соедините частитак, чтобы выходные параметры одной схемы служили входными данными для следующей. Далее работа для художественного гения. Кстати, это такая же процедура, как можно было бы использовать в написании программы или алгоритма.
Разработанный привод на деле отличается минимальной себестоимостью, наличием необходимых защит, эффективностью и гибкостью конструкции. Хорошим подсказчиком неисправностей служит светодиод. Он мигает в тех случаях, когда система находится в настройке, перегружена и т. д. В программе микроконтроллера учтены всевозможные ситуации. Полная автоматизация технологического процесса при экономном электропотреблении.
Но имейте в виду, что вы просто выполнили один шаг в процессе проектирования. В реальном мире проектирования, думается, никто из нас не станет в подробностях спецификацию, схему, анализ и все остальное. Что касается проектов, как правило, совершенствованию нет предела. Только некоторые работы можно повторно использовать.
В реальном мире проектирования, думается, никто из нас не станет в подробностях спецификацию, схему, анализ и все остальное. Что касается проектов, как правило, совершенствованию нет предела. Только некоторые работы можно повторно использовать.
Заключение
Когда частные преобразователи были введены в первые, возможно причины были иные, нежели теперь. В современных условиях, это:
Давайте возьмем небольшой конвейер в качестве примера. Традиционный способ, когда необходимо ускорить процесс изменения, необходимо сначала остановить процесс. Если взять старый механизм и поставить новый, это легко может сократить время, затраты на электроэнергию.
В дополнение к вышеуказанным причинам, функции преобразователя теперь могут быть запрограммированы для специфического применения. При помощи системы можно просто регулировать скорость в базовом диапазоне. Причём контролировать более точно. Частотник может использоваться для преобразования постоянного тока в трехфазный переменный ток с лучшими показателями крутящего момента.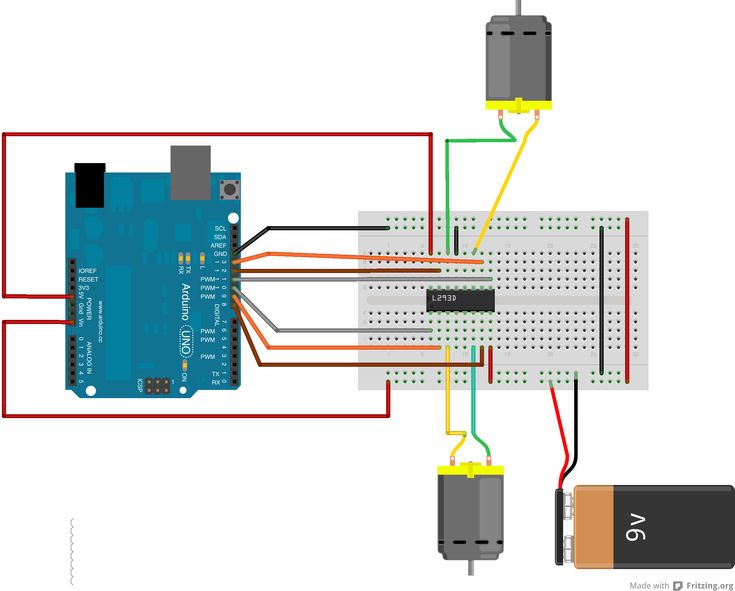
Если захотите получить уйму опыта то можете попробовать самому сделать схему управления двигателем, ГУГЛ в помощь. Тема очень непростая, тут и электроника и программирование, даже математика будет встречаться.Как правило, кто занимается этой темой серьёзно, схемой вряд ли поделятся. Одно можно сказать, освоив эту тему, вы уже не будете считать себя новичком в электронике и программировании микроконтроллеров.
Источник
Подключение моторчика к Ардуино
Подключение мотора к Ардуино ► потребуется при сборке машинки или катера. Рассмотрим различные варианты подключения коллекторного двигателя к Arduino.
Подключение мотора постоянного тока к Ардуино (коллекторного двигателя) требуется при сборке машинки или катера на микроконтроллере Arduino. Рассмотрим различные варианты подключения двигателей постоянного тока: напрямую к плате, через биполярный транзистор, а также с использованием модуля L298N. В обзоре размещены схемы подключения и коды программ для всех перечисленных вариантов.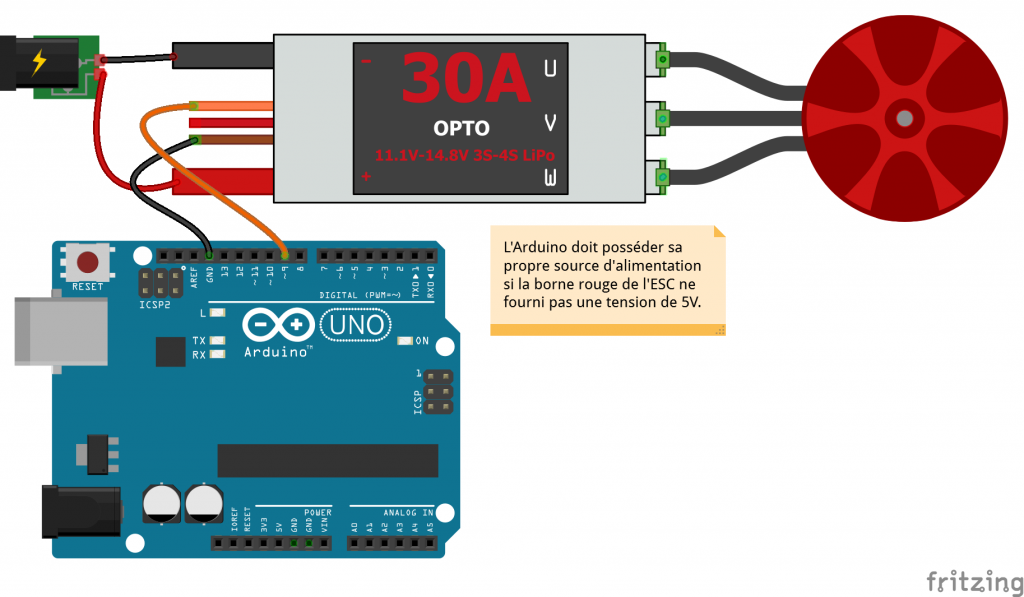
Управление двигателем на Ардуино
Коллекторный моторчик может быть рассчитан на разное напряжения питания. Если двигатель работает от 3-5 Вольт, то можно моторчик подключать напрямую к плате Ардуино. Моторы для машинки с блютуз управлением, которые идут в комплекте с редукторами и колесами рассчитаны уже на 6 Вольт и более, поэтому ими следует управлять через полевой (биполярный) транзистор или через драйвер L298N.
Принцип работы и устройство мотора постоянного тока
На схеме показано устройство моторчика постоянного тока и принцип его работы. Как видите, для того, чтобы ротор двигателя начал крутиться к нему необходимо подключить питание. При смене полярности питания, ротор начнет крутиться в обратную сторону. Драйвер двигателей L298N позволяет инвертировать направление вращения мотора fa 130, поэтому его удобнее использовать в своих проектах.
Как подключить моторчик к Arduino
Для этого занятия нам потребуется:
Перед выбором способа управления двигателем от Arduino Uno r3, уточните на какое напряжение рассчитан ваш моторчик. Если питание требуется более 5 Вольт, то следует использовать транзистор или драйвер. Распиновка транзисторов может отличаться от приведенного примера (следует уточнить распиновку для своего типа). Драйвер L298N позволит не только включать мотор, но и изменять направление вращения.
Если питание требуется более 5 Вольт, то следует использовать транзистор или драйвер. Распиновка транзисторов может отличаться от приведенного примера (следует уточнить распиновку для своего типа). Драйвер L298N позволит не только включать мотор, но и изменять направление вращения.
Скетч. Подключение мотора напрямую
Подключение мотора к Ардуино напрямую — самый простой вариант включения вентилятора на Arduino или машинки. Команда для включения двигателя не отличается, от команды при подключении светодиода к микроконтроллеру. Функция digitalWrite включает/выключает подачу напряжения на цифровой порт, к которому подключен двигатель постоянного тока. Соберите схему и загрузите программу.
Пояснения к коду:
Скетч. Подключение мотора через транзистор
Подключение мотора через транзистор к Ардуино потребуется, если двигатель никак не хочет включаться от платы напрямую, то следует использовать порт 5 Вольт на микроконтроллере или внешний источник питания. Транзистор будет играть роль ключа, замыкая/размыкая электрическую цепь.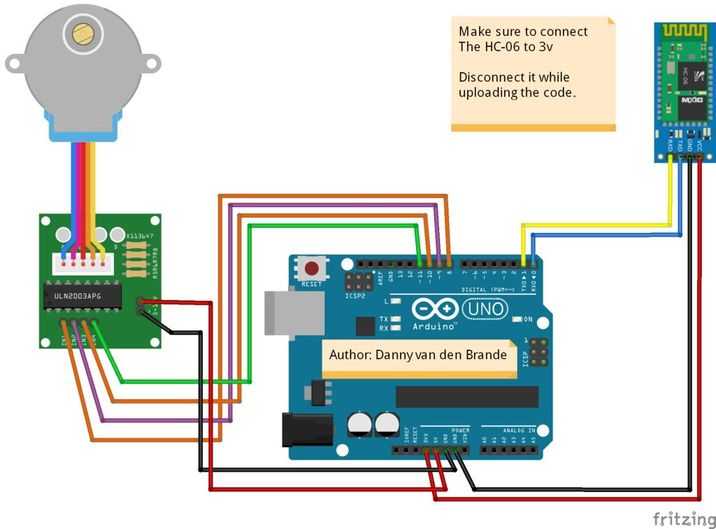 Сам транзистор управляется цифровым портом. Соберите схему, как на картинке и загрузите программу.
Сам транзистор управляется цифровым портом. Соберите схему, как на картинке и загрузите программу.
Подключение FA-130 мотора постоянного тока — Motor DC Arduino
Пояснения к коду:
Скетч. Подключение мотора через драйвер
Подключение мотора к Ардуино через драйвер L298N или Motor Shield L293D позволит менять направление вращения ротора. Но для использования данных модулей потребуется установить соответствующие библиотеки для Ардуино. В примере мы использовали схему подключения двигателя с помощью модуля L298N. Соберите схему, как на картинке ниже и загрузите следующий скетч с использованием.
Источник
Видео
Трёхфазный двигатель от Arduino UNO
Уроки Arduino — управление бесколлекторным мотором
ПОДКЛЮЧЕНИЕ ТРЕХФАЗНОГО ДВИГАТЕЛЯ В СЕТЬ 380 Вольт
Как просто подключить трехфазный двигатель треугольником и звездой в сеть 220, через конденсатор.
Как подключить трехфазный двигатель через магнитный пускатель.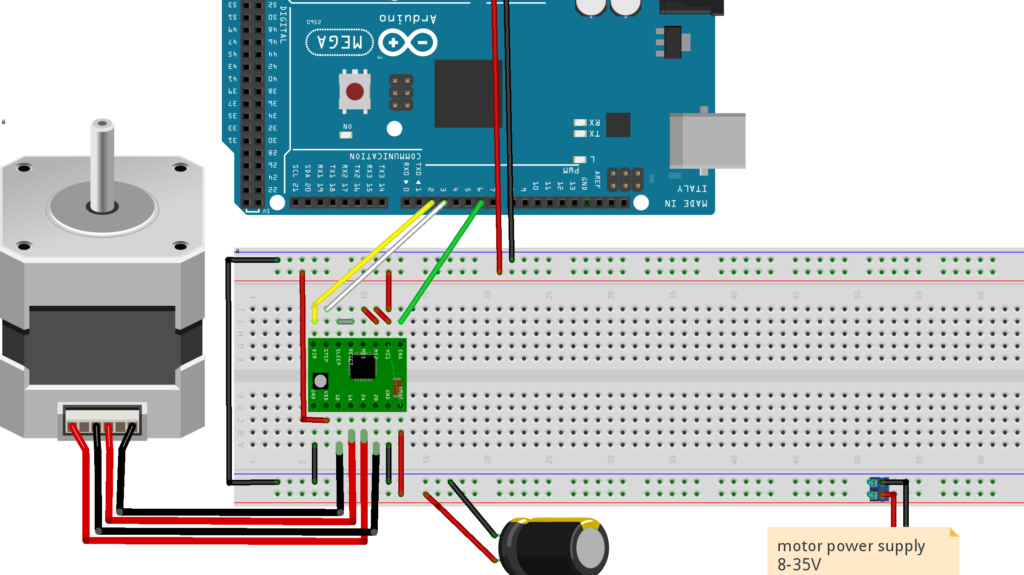
Как быстро и просто подключить трехфазный двигатель в однофазную сеть DuMA8819
Подключение двигателя жесткого диска(HDD) без драйвера. (ARDUINO) Часть 3
как подключить трехфазный двигатель в однофазную сеть
Подключения трехфазного двигателя
Пошаговая схема подключения трехфазного двигателя в однофазную сеть. Повторение — мать учения!
Как подключить электродвигатель к Arduino
Существует множество способов, чтобы подключить малые электродвигатели к Arduino. И самым популярным, а также самым простым из них является подключение двигателя через мост типа H либо через транзисторы. Подключая электродвигатель к платформе Arduino, следует помнить о том, что подключение не должно осуществляться непосредственным способом, поскольку это может привести к повреждению программной платформы.
Зачем электродвигатели подключают к Arduino
Внедрение электродвигателей в создаваемые контуры и управление при помощи Arduino открывает много разнообразных возможностей.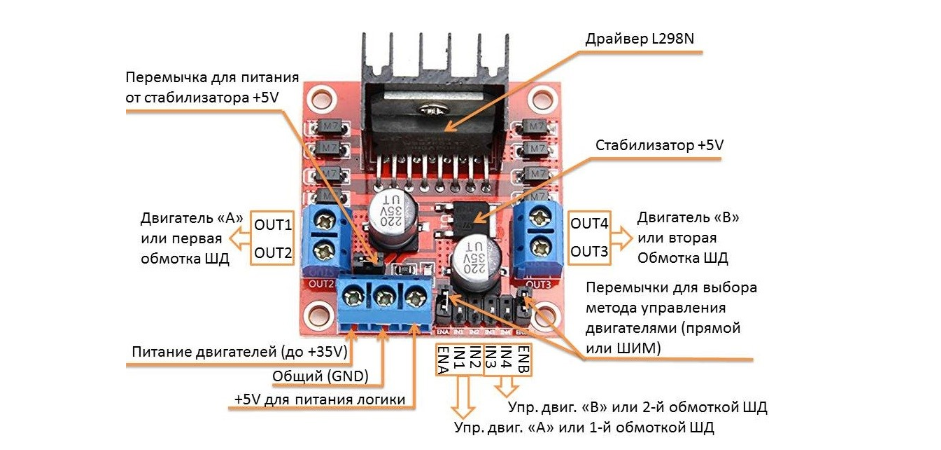 Основной целью подключения двигателей является возможность запуска в движение элементов создаваемых систем, создание транспортных средств и даже роботов. Благодаря Arduino, возможно управление как направлением вращения вала двигателя, так и скоростью вращения.
Основной целью подключения двигателей является возможность запуска в движение элементов создаваемых систем, создание транспортных средств и даже роботов. Благодаря Arduino, возможно управление как направлением вращения вала двигателя, так и скоростью вращения.
Подключение двигателя к Arduino должно осуществляться опосредствованно
Непосредственное подключение программной платформы не только грозит перегоранием выходного порта Arduino, но также ограничивает возможность управления, созданной таким образом системой, до минимума.
Arduino через каждый выходной порт может подавать ток силой около 20 мA, а каждый, даже самый маленький электродвигатель, доступный на рынке, для правильного функционирования требует от десятикратно до тысячекратно большего потребления. Поэтому необходимо подключение электродвигателя к Arduino опосредствованным способом, через соответствующий контроллер, который урегулирует силу подаваемого тока.
Какие двигатели можно подключить к Arduino и на что следует обращать внимание в процессе их выбора
Программная платформа Arduino обеспечивает включение всех низкоамперных электродвигателей, представленных на рынке.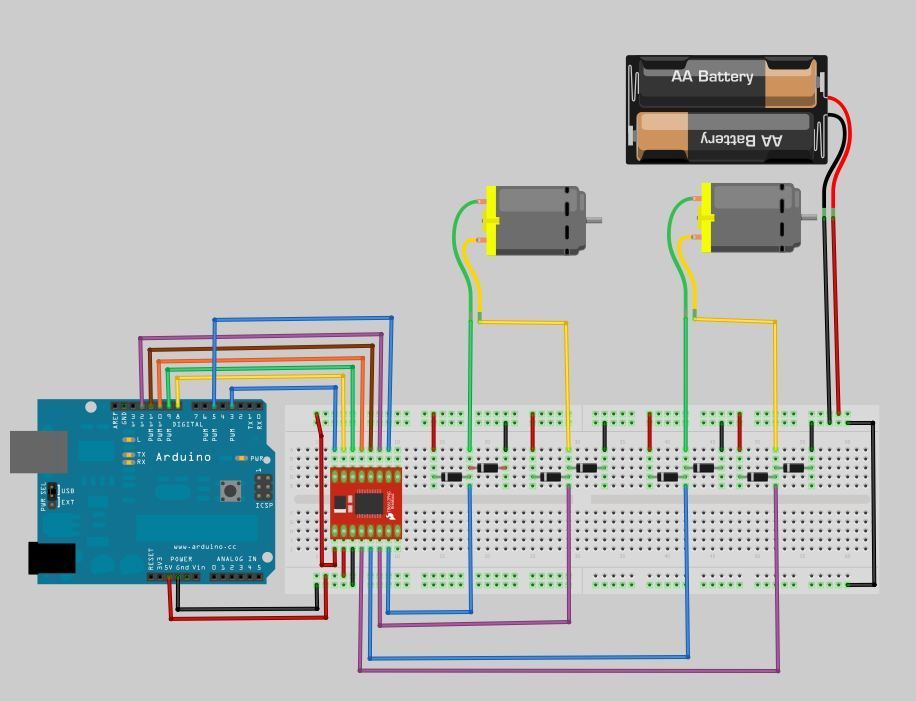 К Arduino можно подключить:
К Arduino можно подключить:
- бесщёточные двигатели BLDC с коммутатором,
- щёточные двигатели DC, которые являются самыми простыми электродвигателями с питанием током DC,
- вибрационные двигатели, которые посредством движения вала генерируют вибрацию,
- шаговые двигатели, обеспечивающие высокую точность управления посредством импульсного движения вала,
- туннельные приводы EDF, состоящие из ротора и двигателя с корпусом,
- линейные серводвигатели, обеспечивающие линейное движение,
- сервомеханизмы.
Параметры, на которые следует обратить внимание при выборе электродвигателя для Arduino, зависят от типа двигателя.
Несмотря на это, среди наиболее существенных из них следует указать:
- сила потребляемого тока [A]: параметр характеризует силу тока, который требуется для правильного запуска двигателя;
- номинальное напряжение [В]: это значение напряжения, на котором будет функционировать система; стандартно системы с Arduino работают на напряжении 12В;
- крутящий момент [Нм]: ключевой параметр электродвигателя (и не только), определяющий его мощность; чем больший крутящий момент генерирует двигатель, тем он мощнее;
- скорость вращения [об. /мин]: параметр, определяющий скорость вращения вала двигателя,
- масса и габариты [г и мм]: эти параметры являются существенными особенно при создании лёгких систем, в которых принимаются во внимание размеры двигателя,
- разрешающая способность [количество шагов]: этот параметр касается исключительно шаговых двигателей и определяет точность, с которой может двигаться вал шагового двигателя,
- линейная скорость [мм/с]: этот параметр касается исключительно линейных двигателей и характеризует скорость, с которой двигатель может выдвигать вал в линейном направлении.
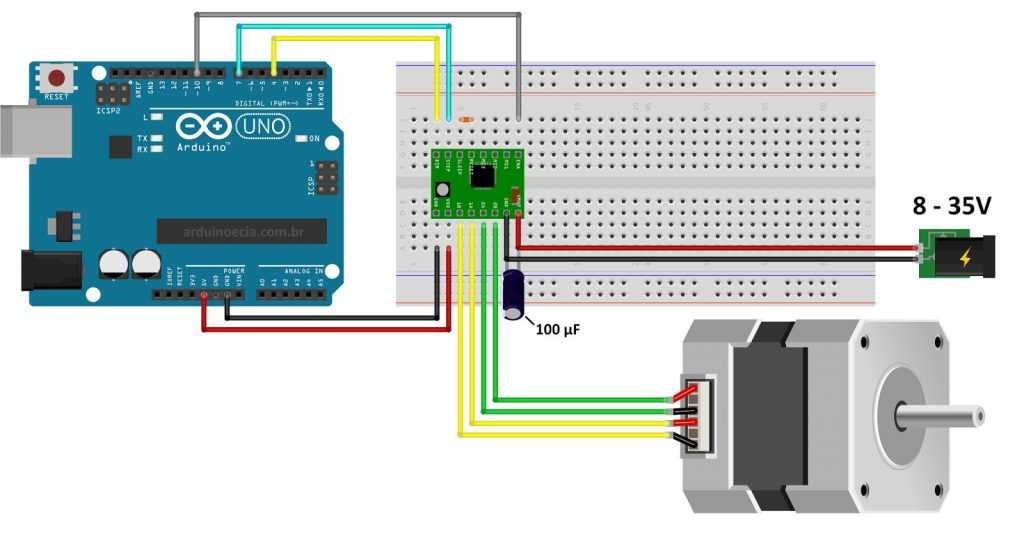 /мин]: параметр, определяющий скорость вращения вала двигателя,
/мин]: параметр, определяющий скорость вращения вала двигателя,
Как подключить электродвигатель к Arduino
Зная виды двигателей, которые можно подключить к Arduino, и параметры, на которые следует обратить внимание во время их подбора, мы можем приступить к работам по подключению. Легче всего подключить стандартные щёточные двигатели DC, вибрационные двигатели и сервомеханизмы. Несколько сложнее подключаются линейные серводвигатели, шаговые двигатели и насосы.
Щёточные двигатели DC и вибрационные двигатели являются наиболее простыми, они чаще всего бывают представлены в системах и одновременно являются самыми лёгкими в подключении электродвигателями. Стандартно к программной платформе подключаются двигатели с силой тока 1-5A, работающие на напряжении 5-9В. Для более мощных двигателей с большими параметрами применяются специальные контроллеры.
Щёточные двигатели DC и вибрационные двигатели можно подключить при помощи системы с транзистором либо через мост типа H. Первый метод позволяет осуществлять управление только скоростью вращения вала двигателя, а метод подключения через мост обеспечивает управление как скоростью, так и направлением вращения вала. Поэтому также следует подобрать соответствующий метод подключения согласно собственным потребностям и целям.
Подключение щёточного двигателя DC и вибрационного двигателя через транзистор
Подключение щёточного двигателя DC и вибрационного двигателя при помощи транзистора является очень простым и требует только трёх компонентов: ограничивающего резистора, выпрямительного диода и транзистора.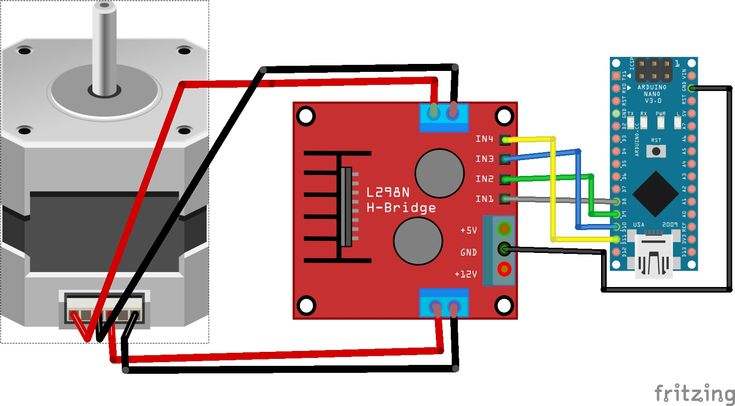 В системе можно использовать, например: выпрямительный диод 1N4148 или 1N4007, транзистор 2N2222 и ограничивающий резистор с сопротивлением 10 кОм. Работы по подключению следует начать с выбора контакта Arduino с соответствующим выходным напряжением.
В системе можно использовать, например: выпрямительный диод 1N4148 или 1N4007, транзистор 2N2222 и ограничивающий резистор с сопротивлением 10 кОм. Работы по подключению следует начать с выбора контакта Arduino с соответствующим выходным напряжением.
Контакт Arduino подсоединяем на контактной плате к резистору и в самом конце — к базе транзистора. Эмиттер транзистора мы заземляем, а его коллектор подключаем к двигателю через параллельно подключённый выпрямительный диод. С другой стороны двигатель следует подключить к питанию. Резистор в схеме ограничивает силу тока, который поступает к транзистору, а выпрямительный диод ограничивает риск возникновения обратных токов и выбросов (скачков напряжения), которые имеют место при включении системы. Обратные токи и пики могли бы привести к повреждению программной платформы.
Подключение через мост типа H
Этот способ подключения гарантирует возможность управления не только скоростью, но и направлением вращения вала двигателя. Насколько в случае вибрационных двигателей управление направлением вращения их вала обычно является необоснованным (поскольку они будут генерировать вибрацию вне зависимости от направления вращения вала), настолько управление валом щёточного двигателя DC обычно является ключевой функциональностью системы.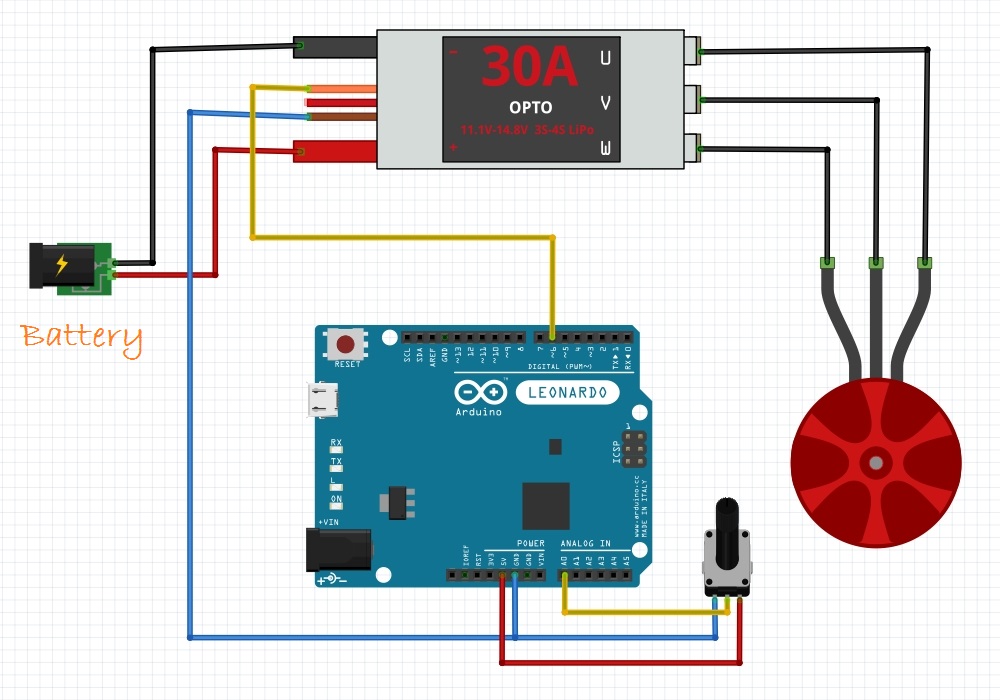
Более того, через мост типа H можно также подключить линейный серводвигатель, если его конструкция основывается на двигателе DC. Мосты типа H можно самостоятельно построить из нескольких транзисторов либо приобрести готовые системы. Их основным заданием является приём сигнала, который посылается Arduino, и трансформация его параметров на выходе моста. Если мы хотим подключить щёточные двигатели DC, вибрационные либо линейные двигатели, необходимо оснастить его ограничивающим резистором (например, с сопротивлением 10 кОм), переключателем и готовой системой моста типа H (например, SN754410, L29NE или L293D).
Мост типа H следует подобрать к системе в плане интенсивности потребляемого двигателем тока во время его максимальной нагрузки – этот параметр носит название токовой эффективности моста. Каждый мост типа H может характеризоваться несколько отличным строением и выводом контактов, поэтому перед тем, как приступить к работам по подключению, следует верифицировать схему вывода контактов в техническом описании моста. Чтобы выяснить способ подключения электродвигателя к Arduino, мы используем мост L293D. Мост L293D оснащен следующими контактами:
Чтобы выяснить способ подключения электродвигателя к Arduino, мы используем мост L293D. Мост L293D оснащен следующими контактами:
- контакт 1: отвечает за управление скоростью двигателя,
- контакты 2 и 7: отвечают за направление вращения вала двигателя,
- контакт 8: питание VC до 36 В,
- контакт 9: может управлять скоростью второго подключённого двигателя,
- контакты 10 и 15: могут управлять направлением вращения вала второго подключённого двигателя,
- контакт 16: питание VCC до 5 В,
- контакты: 4, 5, 12 и 13: заземляемые (подключаемые к земле (GND)).
Первым шагом подключения является размещение моста типа H на контактной плате. После этого следует подключить массу моста к питанию, а затем подключить питание двигателя (или двигателей). Предпоследним этапом работ по подключению является электропитание логической системы управления мостом, последним этапом — подключение контактов, отвечающих за управление работой двигателя (либо двигателей).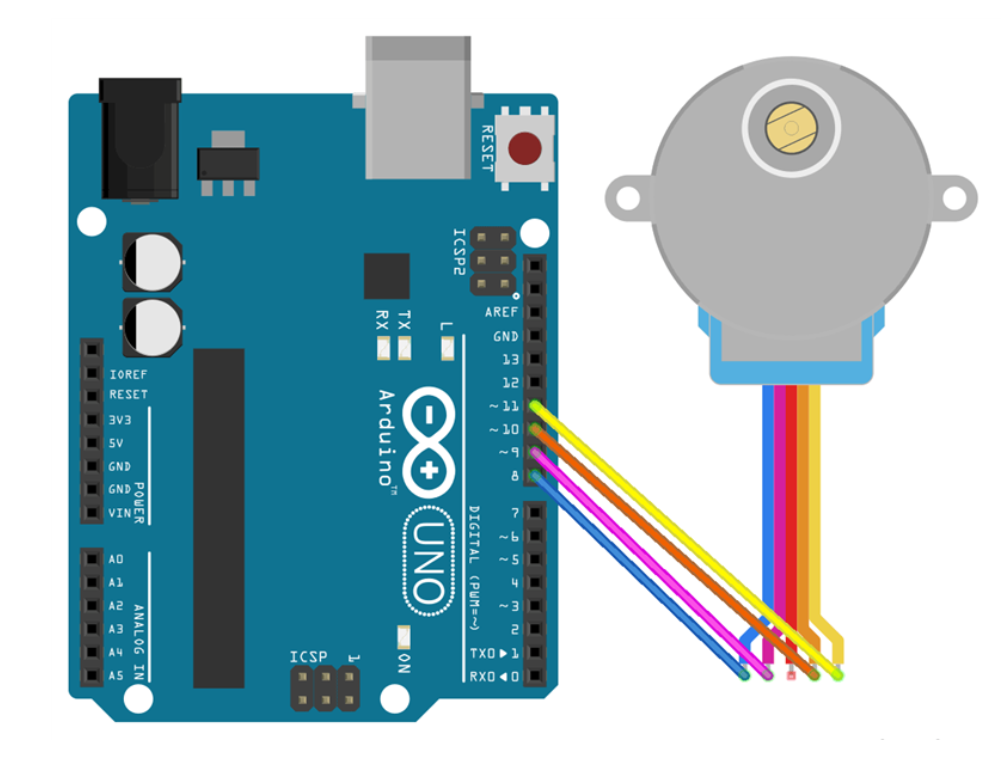
Перед началом подключения следует помнить о том, что система моста типа H с электрическим двигателем может быть запитана от одного либо двух напряжений. Если мы запитаем её от одного напряжения, необходимо будет использование источника питания, имеющего соответствующую хорошую фильтрацию, которая ограничит риск возникновения помех.
Лучшим, более популярным и безопасным решением является питание системы от двух источников. Тогда работа двигателя будет запитана от моста, а логическая часть моста (управляющая рабой двигателя) будет запитана от другого независимого источника. Поэтому 5-вольтный контакт Arduino стоит подключить к логичной части моста, а остальное питание к контактам моста, которые отвечают за управление двигателем.
Подключение сервомеханизмов
Подключение сервомеханизмов является чрезвычайно простым, поскольку их выходы всегда одинаковы. Подключение сервомеханизма к Arduino следует начать с подключения массы питания двигателя и питания системы (обычно это два 5-вольтных источника питания).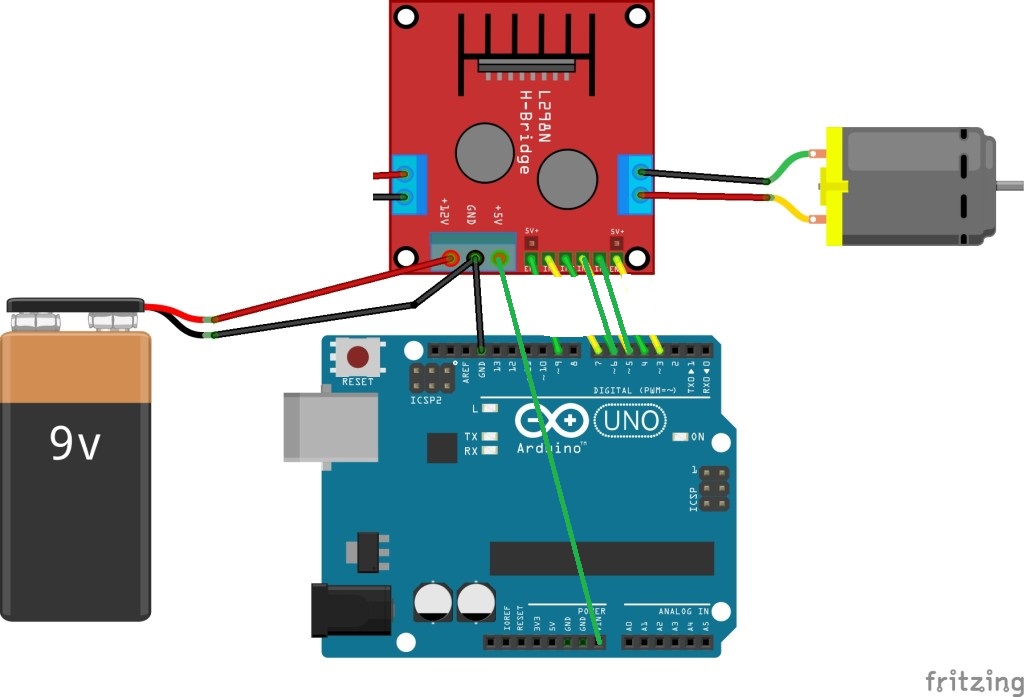
Следующим шагом является подключение выхода PWM Arduino (обозначенного знаком «~») к контакту, который управляет сервомеханизмом. После проведения работ по подключению, следует только записать соответствующую библиотеку. Подключение шаговых двигателей через выделенный контроллер Шаговые двигатели подключаются к Arduino опосредствованно через специальные контроллеры. Эти элементы следует подобрать друг к другу с учётом максимальной интенсивности тока и номинального напряжения, а сам контроллер должен соответствовать как напряжению питания двигателя, так и напряжению питания системы.
Токовая эффективность контроллера должна быть выше, чем максимальная интенсивность тока, потребляемого двигателем. Для потребностей текста следует исходить из того, что необходимо подключить к Arduino шаговый двигатель с напряжением 12В. К нему подходит, например, контроллер A4988.
Сначала мы устанавливаем контроллер на контактной плате, после чего контакты GND и VDD подключаем к питанию контроллера (3-5,5В).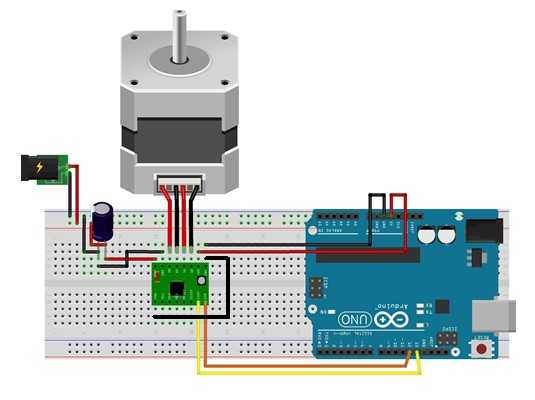 Контакты GMD и VMOT подключаются к питанию двигателя, а контакт SLP — к RST. Контакты 1A, 2A, 1B и 2B подключаются к двигателю.
Контакты GMD и VMOT подключаются к питанию двигателя, а контакт SLP — к RST. Контакты 1A, 2A, 1B и 2B подключаются к двигателю.
От вида шагового двигателя (того, является ли он биполярным или униполярным) зависит способ подключения контактов 1A, 2A, 1B и 2B. В биполярных двигателях контакт 1A подключается к чёрному кабелю двигателя, контакт 2A — к красному кабелю, контакт 1B — к зелёному кабелю, а контакт 2B — к голубому кабелю. Униполярные двигатели имеют шесть проводов, но жёлтый и белый кабель можно не подключать.
Правильное подключение шагового двигателя к Arduino приводит к тому, что для высокого положения вал двигателя вращается вправо, а для низкого положения — влево. Для нарастающего фронта вал двигателя делает один шаг, а его направление зависит от подключения контакта DIR.
Как подключить электродвигатель к Arduino
Чтобы управлять вращением мотора, любому контроллеру необходимо специальное устройство, которое часто называют драйвером (от англ.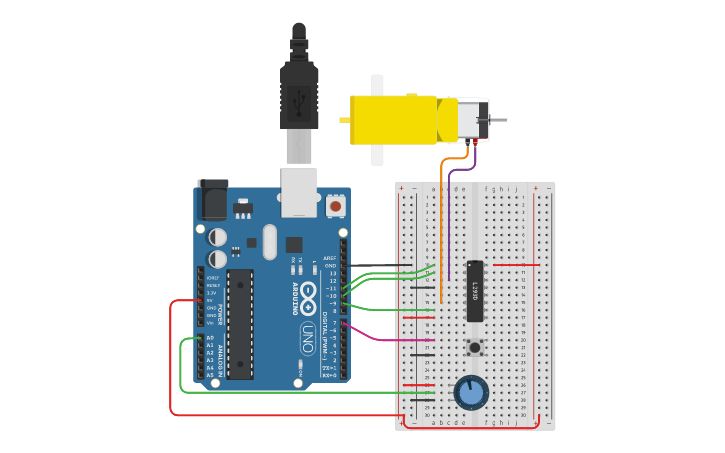 driver — водитель). В уроке «управление двигателем постоянного тока» мы уже пробовали запускать и вращать в разные стороны мотор двумя способами: с помощью одного транзистора и с помощью микросхемы драйвера L293D.
driver — водитель). В уроке «управление двигателем постоянного тока» мы уже пробовали запускать и вращать в разные стороны мотор двумя способами: с помощью одного транзистора и с помощью микросхемы драйвера L293D.
На этот раз, попробуем использовать более мощный двухканальный драйвер L298N, который часто можно встретить в виде модуля красного цвета (хотя встречаются зеленые и синие модели).
Как и в случае L293N, драйвер представляет собой полный H-мост, главная функция которого — менять полярность на нагрузке. А если в качестве нагрузки будет мотор постоянного тока, то смена полярности приведет к смене направления его вращения. Это то, что нам нужно.
Спецификация модуля L298N:
- напряжение питания двигателей: до 35 В;
- рабочий ток (на каждый канал): 2 А;
- периодический ток (80% — вкл, 20% — выкл): 2,5 А;
- кратковременный ток: 3 А;
- вес: 33 г.
Драйвер L298N работает с более высоким током, чем L293D. С помощью L298N мы можем управлять и слабыми моторчиками типа n20 и мощными моторами, такими как JGA25 или даже JGA37 с крутящим моментом до 20-25 кг/см.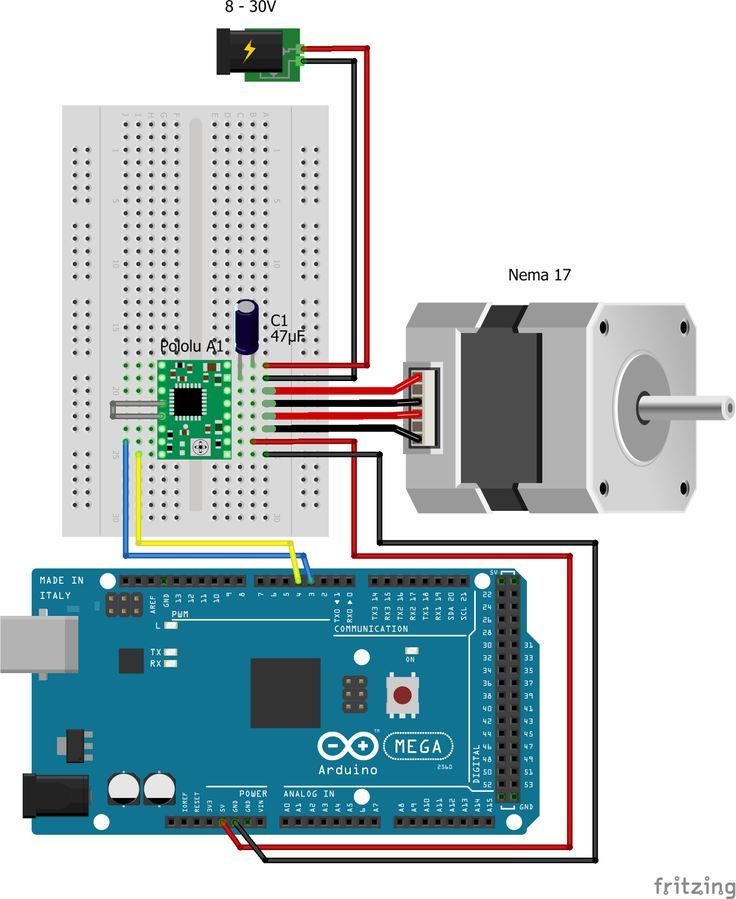 Хватит для большинства DIY проектов!
Хватит для большинства DIY проектов!
Компоненты для урока «Ардуино: драйвер L298N для мотора постоянного тока» на shop.robotclass.ru В корзину В корзину В корзину В корзину В корзину
1Что такое драйвер двигателей и для чего он нужен
Максимальный ток на выводах Arduino слаб (около 50 мА) для такой мощной нагрузки как электромотор (десятки и сотни миллиампер). Поэтому напрямую к выводам Arduino подключать электродвигатель нельзя: есть риск сжечь вывод, к которому подключён двигатель. Для безопасного подключения электродвигателей разных типов к Arduino необходим самодельный или промышленно изготовленный т.н. драйвер двигателей. Драйверы двигателей бывают разные, для их работы часто используются микросхемы типа HG788, L9110S, L293D, L298N и другие. Драйверы двигателей имеют выводы подачи питания, выводы для подключения электродвигателей, а также управляющие выводы.
Различные варианты исполнения драйверов двигателей
В данной статье мы будем использовать драйвер для управления двигателями, сделанный на основе микросхемы L9110S.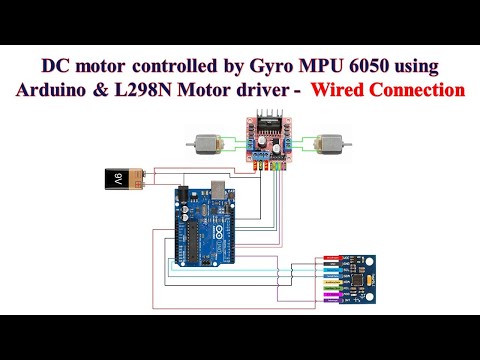 Обычно выпускаются платы, которые поддерживают подключение нескольких двигателей. Но для демонстрации мы обойдёмся одним.
Обычно выпускаются платы, которые поддерживают подключение нескольких двигателей. Но для демонстрации мы обойдёмся одним.
Подключение моторчика к Ардуино
Подключение мотора к Ардуино ► потребуется при сборке машинки или катера. Рассмотрим различные варианты подключения коллекторного двигателя к Arduino.
Подключение мотора постоянного тока к Ардуино (коллекторного двигателя) требуется при сборке машинки или катера на микроконтроллере Arduino. Рассмотрим различные варианты подключения двигателей постоянного тока: напрямую к плате, через биполярный транзистор, а также с использованием модуля L298N. В обзоре размещены схемы подключения и коды программ для всех перечисленных вариантов.
Назначение двигателя Aрдуино и принцип работы
PWM или широтно-импульсная модуляция – это метод, позволяющий нам скорректировать среднее значение напряжения, которое поступает на электронное устройство, путем быстрого включения и выключения питания. Среднее напряжение зависит от рабочего цикла или количества времени, в течение которого сигнал включен, в зависимости от времени, в течение которого сигнал выключен за один промежуток времени.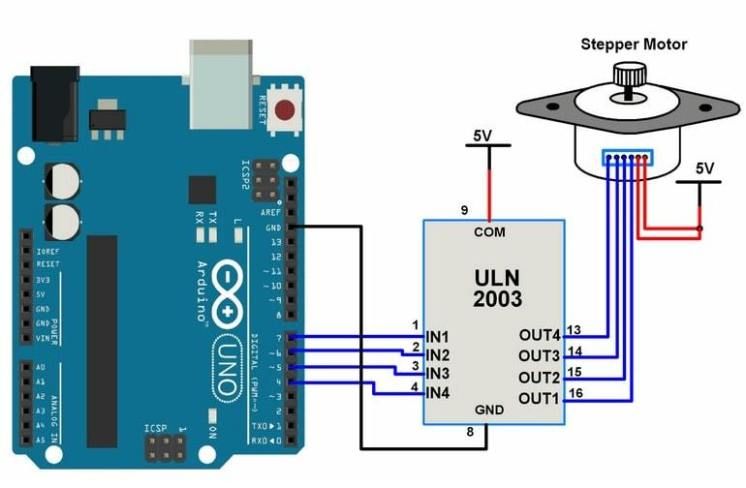
Поэтому, в зависимости от размера прибора, мы можем просто подключить выход PWM Arduino к базе транзистора или к затвору MOSFET и управлять скоростью двигателя, контролируя выход PWM. Сигнал PWM с низким уровнем мощности Arduino включает и выключает затвор на MOSFET, через который приводится прибор высокой мощности. Ардуино GND и источник питания двигателя GND должны быть соединены вместе.
Регулировка оборотов
Известно, что при подключении такого двигателя к источнику питания он сразу начинает вращаться, а направление его вращения зависит от полярности подключенного напряжения.
При изменении питающего напряжения изменяется ток в обмотках, следовательно изменяется и подводимая мощность и его обороты. Есть два основных способа изменения напряжения на клеммах таких электродвигателей — использовать балластные резисторы для ограничения тока или использовать ШИМ-регулирование.
Балластные резисторы греются, выделяют энергию в виде тепла в воздух – это не эффективно и бесполезно.
Смысл ШИМ-регулирования состоит в подаче импульсов с фиксированной частотой, но изменяющейся шириной. От ширины импульса зависит действующее напряжение на подключенной нагрузке и вычисляется по формуле:
Uнагр=Uпит×k,
где Uнагр – напряжение на нагрузке, Uпит – напряжение источника питания, k – коэффициент заполнения.
Коэффицент заполнения – то отношение ширины импульса (tимп) к периоду (T), то есть:
k=tимп/T.
На рисунке ниже вы видите, как выглядит питание нагрузки через ШИМ-регулятор при разных коэффициентах заполнения.
Так выглядит ШИМ-сигнал
Короче говоря,при ШИМ-регулировании питание очень быстро включается и отключается, то есть подаётся импульсами. И чем уже эти импульсы – тем меньшее напряжение доходит до нагрузки.
Для ШИМ-регулирования можно собрать схему на таймере NE555 и других микросхемах либо использовать микроконтроллер.
Схема ШИМ-регулятора на NE555, ёмкость C можно рассчитать по формулам из даташита, либо подобрать, от неё зависит частота ШИМ, можете использовать 1, 0. 47, 0.22 мкФ.
47, 0.22 мкФ.
Семейство плат с микроконтроллером ардуино также способно выдавать ШИМ сигнал, стандартная частота ШИМ у них 500Гц, а если быть точным, то 488,28 Гц. Если вам не принципиальная частота – то можно использовать как есть без сторонних библиотек. Отмечу, что для большинства применений этого достаточно. Не очень хорошо это подходит для регулирования яркости осветительных приборов из-за повышения коэффициента пульсаций светильника и вреда для зрения в итоге.
Назначение выводов на плате (распиновка)
Обратите внимание на иллюстрацию, приведенную выше. Из неё мы видим микроконтроллер Atmega328, который лежит в основе этих плат выдаёт ШИМ-сигнал только на выходах 3, 5, 6, 9, 10, 11, которые обычно помечены знаком «~» плате, а на картинках с распиновками сокращением «PWM».
Преобразователь частоты для 3х фазового асинхронного двигателя на Arduino UNO
Набросал программу для управления 3х фазным асинхронным двигателем через драйвера типа IR2101, IR2106 с двумя входами.
Программа для Arduino на чипе ATMEGA328P, 16МГц
Частота регулируется переменным резистором от 10 до 150 Гц.
В железе пока не проверял, но на эмуляторе синусы выглядит красиво.
Хочется получить здоровую обоснованную критику, предложения, замечания.
Картинка с 2-мя фазами(чтобы показать 3-ю нужно еще 2 входа осциллографа):
Схема в симуляторе:
Отображение текущей частоты только по сериал будет?
Предлагаю изменение частоты реализовать на энкодере, удобно и практично!
Отображение текущей частоты только по сериал будет?
Можно шкалу переменника отградуировать от 10 до 146. Она линейная.
Мне на станок нужно, там чем меньше наружу торчит, тем лучше
Как использовать двигатели постоянного тока в Arduino
Ozeki 10
В этом руководстве вы сможете получить некоторую информацию о двигателях постоянного тока Arduino.
Двигатель постоянного тока является самым простым из электродвигателей и используется во всех типах электроники для хобби.
В этом руководстве представлена основная информация о двигателях постоянного тока, а также о том, как их можно подключить.
его на Arduino и как вы можете использовать его с Ozeki 10. Документ также включает
диаграммы и видео, которые помогут вам понять концепцию двигателей постоянного тока. Итак, приступим.
Что такое двигатель постоянного тока Arduino?
Двигатель постоянного тока (двигатель постоянного тока) является наиболее распространенным типом двигателя. двигатели постоянного тока
обычно имеют только два вывода, один положительный и один отрицательный. Если вы соедините эти
два провода напрямую к аккумулятору, двигатель будет вращаться. Если вы поменяете проводников,
двигатель будет вращаться в противоположном направлении.
Как использовать двигатель постоянного тока Arduino?
Для работы с двигателями постоянного тока необходимо подключить три контакта, как на схеме подключения.
показывает это (рис. 1). Один нужно соединить с землей (Gnd), другой с
двигатель к контакту 5V. Третий контакт должен быть подключен к контакту PWM на вашем
Третий контакт должен быть подключен к контакту PWM на вашем
Ардуино. С подключенным двигателем постоянного тока теперь вы сможете им управлять. Вы можете настроить
скорость вращения двигателя в диапазоне от 0 до 255.
Схема подключения двигателя постоянного тока Arduino
Рисунок 1 – Схема подключения двигателей постоянного тока Arduino
Как использовать двигатели постоянного тока Arduino в Ozeki
Контроллер двигателя постоянного тока подключает ваши двигатели постоянного тока к программному обеспечению Ozeki. Вы можете подключить до двух двигателей постоянного тока через любую микросхему драйвера двигателя L298N.
Этот чип интегрирован в плату контроллера двигателя постоянного тока LM298, а также в драйвер двигателя постоянного тока Ozeki.
Вы можете изменить направление движения и скорость обоих двигателей с помощью Ozeki.
Электродвигатели должны питаться от внешнего источника питания с максимальным напряжением 36 В.
Чтобы использовать двигатель постоянного тока в Ozeki, вам сначала нужно скачать Ozeki Robot Developer. озэки
озэки
Robot Developer установит библиотеки Arduino, необходимые для эффективного использования этого датчика.
Скачать Ozeki Robot Developer
После установки разработчика Ozeki Robot вам необходимо загрузить код управления двигателем постоянного тока.
к вашему Ардуино. Вы можете найти код и инструкции по загрузке на следующих страницах.
Процесс загрузки включает в себя два шага: сначала вам нужно отформатировать EEPROM Arduino,
затем вам нужно загрузить контрольный код. Процедура очень проста, требуется только
несколько секунд.
Загрузите код двигателя постоянного тока в Arduino Uno 9.0030 Загрузить код двигателя постоянного тока в Arduino Mega 2560
Загрузить код двигателя постоянного тока в Arduino Nano
Загрузить код двигателя постоянного тока в Ozeki Matrix
Загрузить код двигателя постоянного тока в Raspberry Pi
Двигатели Arduino и Ozeki будут обмениваться данными через порт USB с использованием протокола двигателя постоянного тока Ozeki. Этот
Этот
Протокол позволяет вам использовать двигатель непосредственно на вашем ПК. Вы сможете управлять этим двигателем через веб-интерфейс.
пользовательский интерфейс или вы сможете общаться с ним с помощью Ozeki Chat. Вы можете прочитать больше об управлении чатом на следующей странице.
Как общаться с двигателем постоянного тока с помощью чата
Важно понимать управление чатом, потому что когда вы строите робота,
способ, которым вы хотите управлять этим двигателем, — это отправка и получение сообщений. если ты
откройте приложение Ozeki Robot Developer, вы увидите, кому вы можете написать C#.Net
программа для работы с этим мотором.
Этапы подключения
- Подключите двигатель постоянного тока к Arduino
- Подключите плату Arduino к компьютеру
- Проверьте COM-порты, чтобы узнать, подключен ли ваш Arduino
- Загрузите пример кода в Arduino
- Откройте https://localhost:9515 в браузере
- Выберите подключение вашего двигателя постоянного тока
- Настройка атрибутов двигателя постоянного тока
- Нажмите «Обновить», чтобы проверить двигатель постоянного тока
Обзор системы
Предлагаемая нами система состоит из двигателя постоянного тока, подключенного к аналоговому порту.
вашего Ардуино. Arduino будет отвечать за чтение данных с этого устройства.
в настоящее время. Мозг системы будет работать на ПК (рис. 2). На ПК Озеки
10 смогут управлять общением. Вы можете легко запустить Ozeki 10 с помощью веб-браузера.
Рис. 2. Конфигурация системы подключения двигателя постоянного тока к ПК с помощью Arduino
Предварительные условия
- 1 или 2 небольших двигателя постоянного тока
- Ozeki 10 установлен на вашем компьютере
- Программируемая плата (Arduino Mega/Nano/Uno, драйвер двигателя постоянного тока Ozeki или Raspberry Pi)
- Если вы не используете драйвер двигателя постоянного тока Ozeki, требуется плата контроллера двигателя постоянного тока LM298
Для подключения Arduino Mega/Nano/Uno, драйвера двигателя постоянного тока Ozeki к компьютеру необходим USB-кабель
Шаг 1. Подключите двигатели постоянного тока к плате Arduino
Вы можете увидеть, как подключить двигатели постоянного тока
на любую из следующих досок:
- Ардуино Мега 2560
- Ардуино Нано:
Ваш браузер не поддерживает видео тег.
- Ардуино Уно
- Драйвер двигателя постоянного тока Ozeki
- Малиновый Пи
(Если вы используете Raspberry Pi, перейдите к «Шаг 3»)
После подключения подключите плату к компьютеру!
Шаг 2. Загрузить код в микроконтроллер
(Вот код для загрузки)
Ваш браузер не поддерживает видео тег.
Шаг 3. Запустите Ozeki 10, чтобы попробовать двигатели постоянного тока
Ваш браузер не поддерживает видео тег.
Шаг 4. Настройка двигателей постоянного тока в Ozeki 10
Чтобы иметь возможность настроить ваши двигатели постоянного тока (подключенные к вашему Arduino) в Ozeki 10, который установлен
на вашем компьютере вам необходимо открыть графический интерфейс пользователя (GUI) Ozeki
10. Вы можете открыть графический интерфейс, введя URL-адрес компьютера в свой веб-браузер.
Например, если наш ПК имеет IP-адрес 192.168.1.5, мы бы
введите http://192.168.1.5:9513 в наш веб-браузер.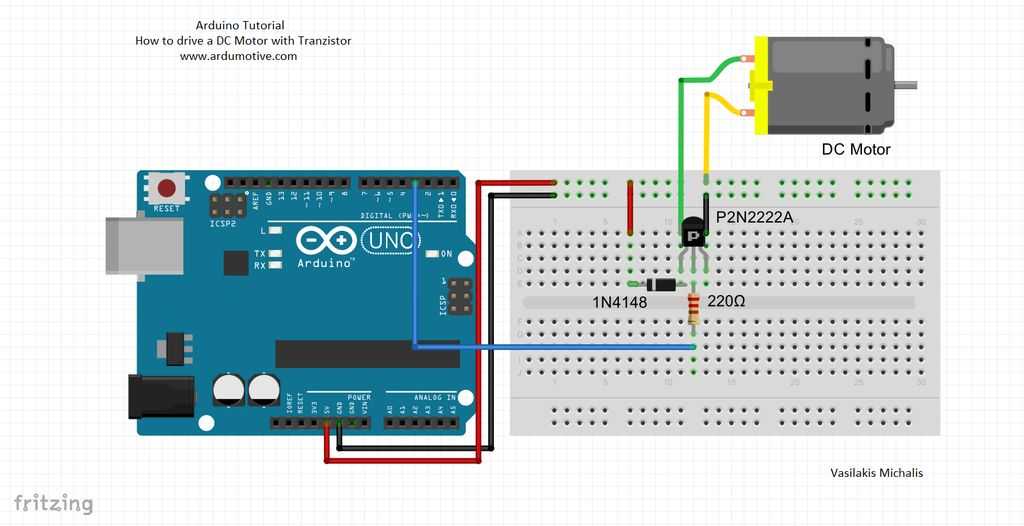
Шаг 5. Понимание протокола двигателей постоянного тока
Контроллер двигателя постоянного тока может связываться с Ozeki через
следующий протокол.
Каталожные номера:
https://www.dummies.com
https://www.tutorialspoint.com
Дополнительная информация
- Датчики и приводы Arduino
- Как использовать аналоговый датчик в Arduino
- Как использовать кнопочный контроллер в Arduino
- Как использовать зуммер в Arduino
- Как использовать датчик dht в Arduino
- Как использовать диспетчер EEPROM в Arduino
- Как использовать датчик гироскопа в Arduino
- Как использовать менеджер идентификаторов в Arduino
- Как использовать ИК-трансивер в Arduino
- Как использовать аналоговый джойстик в Arduino
- Как использовать клавиатуру в ардуино
- Как использовать ЖК-дисплей в Arduino
- Как использовать считыватель NFC в Arduino
- Как использовать оптический вентиль в Arduino
- Как использовать регистр в ардуино
- Как использовать приемопередатчик RF 433 МГц
- Как использовать приемопередатчик RF 2,4 ГГц
- Как использовать светодиод RGB в Arduino
- Как использовать датчик RGB в Arduino
- Как использовать поворотный энкодер в Arduino
- Как использовать серводвигатель в Arduino
- Как использовать шаговый двигатель в Arduino
- Как использовать переключатель в ардуино
- Как использовать датчик температуры в arduino
- Как использовать таймер в ардуино
- Как использовать ультразвуковой датчик в Arduino
| Зуммер | Arduino Mega |
Основы электроники Arduino: управление двигателем
Эта статья была переведена на английский язык и первоначально опубликована для deviceplus.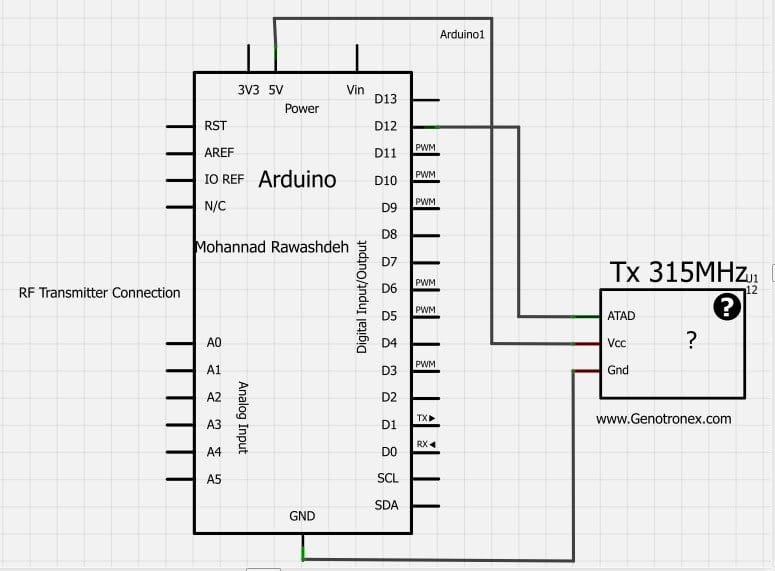 jp.
jp.
В Device Plus было представлено множество приложений для Arduino и примеры деталей, но знание основ особенно важно, когда вы что-то создаете. Вот почему в сегодняшней статье мы рассмотрим ключевые основы Arduino. Обучать нас этому сегодня будет эксперт и автор книги «Введение в основы Arduino Electronic Crafts!» Казухиро Фукуда.
В этой статье я хотел бы рассказать о том, как можно управлять двигателями с большими электрическими токами.
Двигатели используются для запуска самых разных механизмов, таких как дроны и автомобили. Подключение двигателей к источнику питания позволяет электронным компонентам генерировать вращательное движение. Присоединение шин или пропеллеров к двигателю также увеличивает вращение и движение операций.
На Arduino можно управлять мотором. Как и в случае со светодиодом, вы можете управлять вращением или остановкой двигателя, включая и выключая питание, подаваемое на двигатель. В сочетании с другими датчиками можно настроить автоматическое управление, например, останов двигателя при приближении препятствия.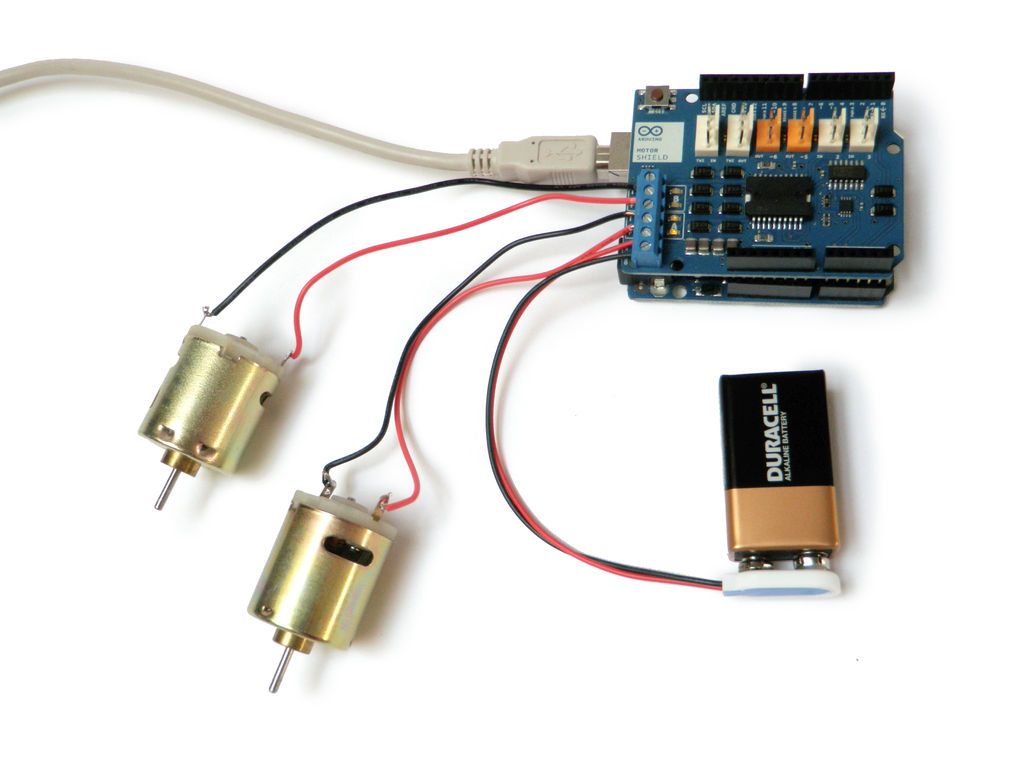
Двигатель вращается в противоположном направлении при изменении направления подключенного источника питания. Также возможно изменить скорость вращения, регулируя количество протекающего тока. В результате это дает возможность вращаться с высокой скоростью, когда двигатель движется, или медленно останавливаться в желаемом положении путем постепенного замедления при остановке. Даже если снаряд попадет в вентиляторы, двигатель может двигаться назад и двигаться в других направлениях. При этом сегодня мы рассмотрим способы управления двигателем на Arduino.
[Соглашение о таблице]
・ Работая двигатель требует драйвера
・ Соединение двигателя с Arduino
・ Скорость с изменением программы
・ Скорость с изменением программы
・ Скорость. двигатель
Для работы двигателя требуется драйвер
На цифровом выходе Arduino вы можете переключаться между высоким и низким уровнем для управления световыми вспышками светодиода.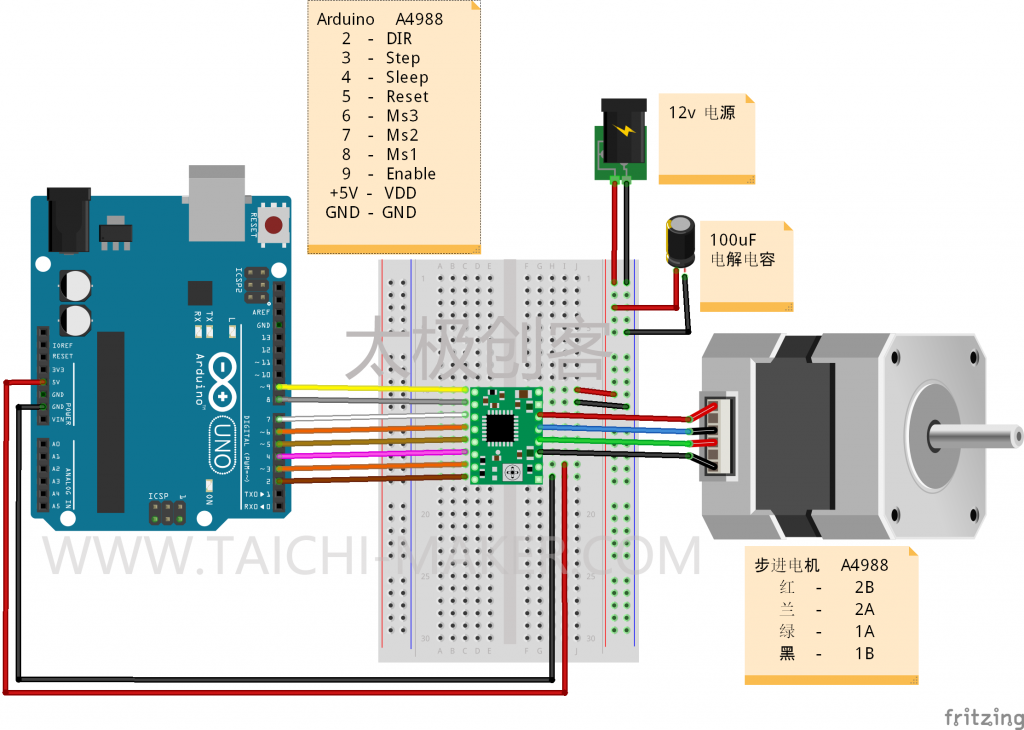 Используя эту функцию, вы сможете подавать электроэнергию на двигатель. Однако, даже если вы на самом деле подключите двигатель напрямую к Arduino, он не будет работать.
Используя эту функцию, вы сможете подавать электроэнергию на двигатель. Однако, даже если вы на самом деле подключите двигатель напрямую к Arduino, он не будет работать.
Для того, чтобы двигатель двигался, требуется большое количество электрического тока. Например, для сегодняшнего [RE-280RA] вам потребуется более 1 А электрического тока, чтобы он двигался. Однако цифровой выходной разъем Arduino может протекать только до 20 мА. Протекание любого электрического тока через это потенциально может повредить Arduino. Для этого нам нужно подключить мотор к выходному разъему Arduino и управлять им.
Здесь будет использоваться「Драйвер двигателя」. Драйвер двигателя — это электрический компонент, используемый для управления двигателем. Подготовьте цепь, которая соединяет двигатель с источником питания для работы двигателя, и вставьте драйвер двигателя внутрь. Драйвер двигателя может подключать и отключать цепь управления двигателем с помощью внешнего сигнала, а также управлять вращением и остановкой двигателя.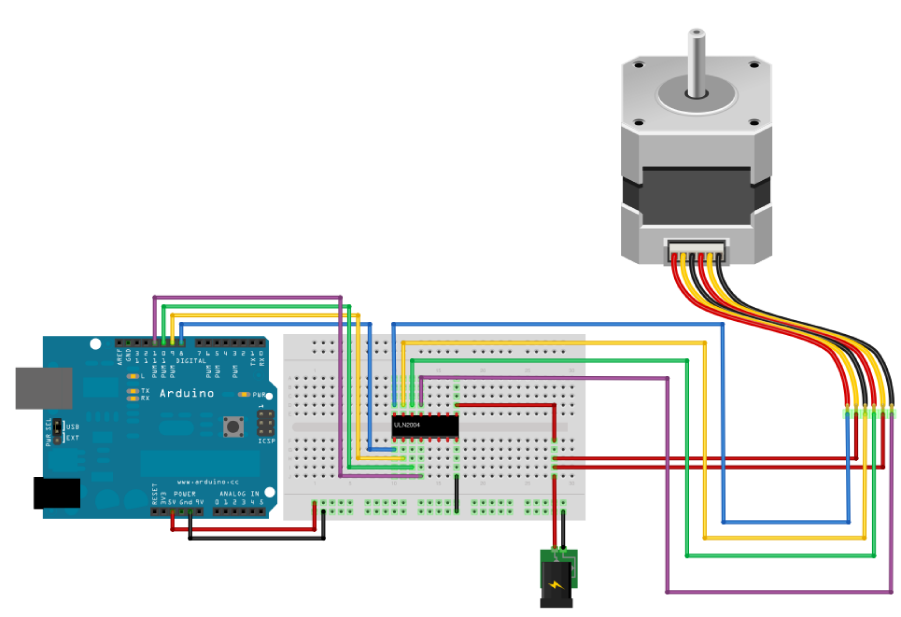 Так как в управляющий сигнал почти не поступает ток, то даже при подключении Arduino управлять мотором можно будет без проблем.
Так как в управляющий сигнал почти не поступает ток, то даже при подключении Arduino управлять мотором можно будет без проблем.
В зависимости от привода двигателя направление вращения может переключаться управляющим сигналом. Оснащенный двумя разъемами управления, когда для одной стороны установлено значение «Высокий», он будет вращаться нормально, а для другой стороны, для которого установлено значение «Высокий», будет вращаться в обратном направлении. Это позволяет осуществлять управление вперед, назад и остановку.
Подключение мотора к Arduino
Теперь попробуем управлять мотором с Arduino. Для этой части будет использоваться следующая электроника, поэтому, пожалуйста, убедитесь, что вы подготовили ее.
Двигатель постоянного тока
Это корпус двигателя. Эти типы двигателей, в которых используются сухие батареи, называются «двигателями постоянного тока». В этой статье мы будем использовать「RE-280RA」. Аккумулятор RE-280RA может поддерживать электрическое напряжение до 4,5 В.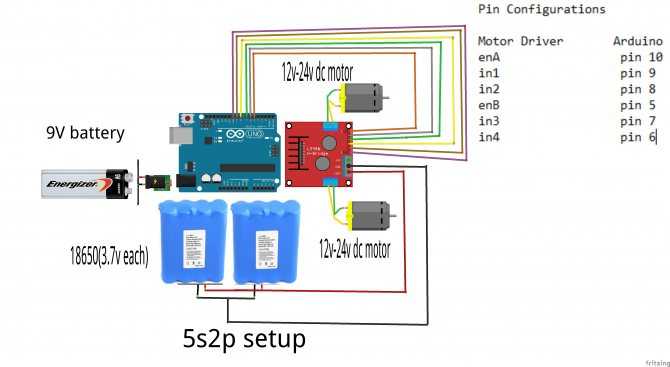
Драйвер двигателя
Мы будем использовать это для управления двигателем. Следуя сигналам от Arduino, можно управлять подачей электроэнергии на двигатель и направлением вращения. Мы будем использовать「BA6956AN」из ROHM. От разъема с вырезами (слева на картинке) они считаются как разъем 1 и разъем 2.
Конденсатор 0,1 мкФ
Конденсатор — это электрический компонент, который может накапливать небольшое количество электроэнергии. Когда он работает на моторе, он начинает шуметь. Этот шум может оказывать негативное воздействие на другие работающие электрические детали. Поэтому подключите конденсатор к обоим разъемам, чтобы уменьшить шум.
Резистор 10 кОм (1/4 Вт)
Чтобы предотвратить поломку электронных компонентов из-за внезапного протекания большого электрического тока, ток можно подавить с помощью резистора. На этот раз, чтобы указать напряжение, подаваемое на двигатель, разъем Arduino 3. 3V подключен к драйверу двигателя. Обычно ток почти не течет, но в некоторых случаях может течь большой ток, поэтому подключите резистор 10 кОм, чтобы предотвратить протекание больших токов. На резисторе 10 кОм напечатано «Коричневый Черный Оранжевый Золотой» вместе с цветовым кодом.
3V подключен к драйверу двигателя. Обычно ток почти не течет, но в некоторых случаях может течь большой ток, поэтому подключите резистор 10 кОм, чтобы предотвратить протекание больших токов. На резисторе 10 кОм напечатано «Коричневый Черный Оранжевый Золотой» вместе с цветовым кодом.
Батарея
Защелка батареи
Батареи используются в качестве источника питания для вращения двигателя. Здесь будет использоваться 006P, который может подавать напряжение до 9 В. Он также использует батарейные защелки для подключения батарей к макетной плате.
Электрические зажимы Линии перемычек
Для двигателя необходима проводка для разъемов до макетной платы. Обычно проводник припаивается к разъему. Однако, если вы используете перемычку с электрическим зажимом, вы можете просто подключить его, вставив зажим в разъем двигателя, что устраняет необходимость пайки.
Подготовив каждый из компонентов, соедините их, как показано ниже.
Подсоедините двигатель к разъемам 2 и 4 привода двигателя, зажав разъем электрическим зажимом. Имейте в виду, что во время работы двигателя может возникать шум, который может повлиять на другие устройства. Таким образом, подключение конденсаторов к обоим разъемам двигателя уменьшит уровень шума.
Двигатель может питаться от отдельно подготовленного аккумулятора. Следовательно, питание можно подавать от аккумулятора, подключив аккумулятор к пятому и третьему разъемам драйвера двигателя.
Кроме того, двигатель, использованный на этот раз, имеет диапазон питания до 4,5 В. По этой причине напряжение может быть слишком высоким с батареей 9 В, поэтому существует вероятность повреждения двигателя. Поэтому укажите максимальное выходное напряжение, подаваемое на двигатель, на разъеме 1 драйвера двигателя. На этот раз мы сможем подать на двигатель до 3,3 В. Подключите блок питания Arduino 3,3 В к разъему 1 и укажите максимальное напряжение. Вращением двигателя можно управлять с помощью седьмого и девятого разъемов драйвера двигателя. Это означает, что подключение к разъемам 5 и 6 Arduino позволяет вам управлять двигателем через выход Arduino.
Это означает, что подключение к разъемам 5 и 6 Arduino позволяет вам управлять двигателем через выход Arduino.
Управление двигателем по программе
После подключения попробуем управлять двигателем с помощью кода программирования. Вращением двигателя можно управлять с помощью выходных сигналов разъемов 5 и 6 Arduino. Вращением, остановкой и направлением вращения можно управлять, изменяя высокий или низкий уровень на этих двух разъемах. В случае с BA6956AN им можно управлять следующим образом.
При нормальном вращении выход разъема 5 устанавливается на высокий уровень, а выход разъема 6 — на низкий. Запись приведенного ниже кода программирования в Arduino должна запустить нормальное вращение двигателей.
В десятой строке выход должен быть установлен на высокий уровень, а на разъеме 6 в шестой строке выход должен быть установлен на низкий уровень.
Если вы хотите, чтобы двигатель вращался в противоположном направлении, выход разъема 5 должен быть установлен на низкий уровень, а выход разъема 6 — на высокий уровень.
Программный код должен выглядеть следующим образом:
В десятой строке выход разъема 5 должен быть установлен на низкий уровень, а в одиннадцатой строке разъем 6 должен быть установлен на высокий уровень. Если вы хотите остановить двигатель, оба выхода для разъемов 5 и 6 должны быть установлены на низкий уровень.
Программный код должен выглядеть следующим образом:
Кроме того, установка обоих выходов на высокий уровень приведет к включению выключателя. Установка любого из них на низкий уровень приведет к его остановке через короткий промежуток времени.
Изменение скорости вращения двигателя
В прошлый раз мы смогли изменить яркость с помощью метода вывода светодиодов, называемого ШИМ. Даже на двигателе скорость вращения можно изменить, управляя двигателем с помощью ШИМ. Переключаясь между высоким и низким за короткий промежуток времени, двигатель попеременно переключается между вращением и остановкой, при этом скорость вращения фактически ниже, чем обычно. Чем дольше High time, тем быстрее будет скорость вращения, и наоборот.
Чем дольше High time, тем быстрее будет скорость вращения, и наоборот.
Для двигателя выведите управляющий разъем направления, в котором вы хотите вращать ШИМ, и всегда держите другой разъем на низком уровне. Для нормального вращения выведите разъем 5 на ШИМ и оставьте разъем 6 на низком уровне. Для обратного вращения выведите разъем 6 на ШИМ и оставьте разъем 5 на низком уровне. Программный код для управления скоростью нормального вращения приведен ниже.
Для кода программирования установите выходной разъем 5 в строке 10 на половину коэффициента ШИМ (максимальное значение 255) и оставьте разъем 6 в строке 11 на низком уровне. Если вы измените число в строке 10, скорость также изменится. Однако двигатель не будет вращаться, если High меньше определенного процента. Если двигатель не вращается при малом значении, попробуйте указать большее значение. Вы можете постепенно изменять скорость, постепенно увеличивая или уменьшая значение, выводимое из разъема 5. В следующей программе скорость вращения будет постепенно увеличиваться из состояния остановки, и как только она достигнет максимума, скорость будет постепенно уменьшаться и останавливаться.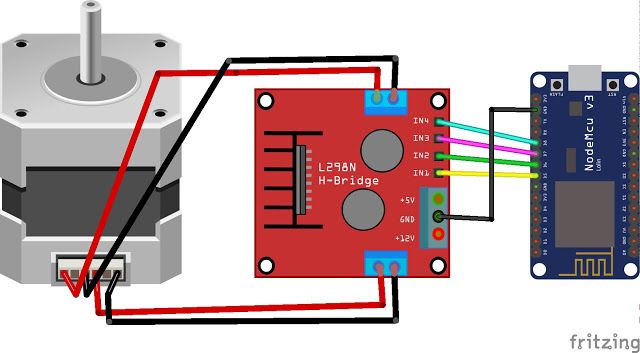
Сегодня мы рассмотрели различные способы управления электронными компонентами Arduino, такими как светодиоды или двигатели. В следующий раз мы поговорим о том, как посмотреть состояние переключателей на Arduino.
Ознакомьтесь с нами в социальных сетях
Контроллер двигателя Raspberry Pi и конфигурации Arduino
Раскрытие информации: некоторые из приведенных ниже ссылок являются партнерскими ссылками. Это означает, что без каких-либо затрат для вас я буду получать партнерскую комиссию, если вы перейдете по ссылке и совершите покупку. Learn Robotics является участником партнерской программы Amazon Services LLC, партнерской рекламной программы, предназначенной для предоставления веб-сайтам возможности получать доход от рекламы за счет рекламы и ссылок на Amazon.com.
Если вы чем-то похожи на меня, значит, вам нравится собирать мобильных роботов. Я уверен, вы знаете, что мобильные роботы состоят из 5 частей: шасси, двигателей, контроллеров, датчиков и источника питания.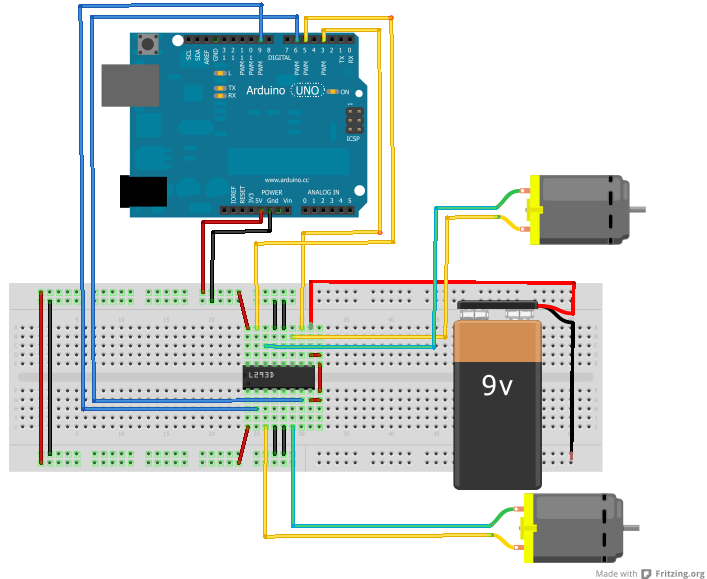 Чтобы охватить три из этих групп, вам необходимо правильно подключить двигатели к контроллерам (двигатель и главный), а затем добавить источник питания.
Чтобы охватить три из этих групп, вам необходимо правильно подключить двигатели к контроллерам (двигатель и главный), а затем добавить источник питания.
Контроллер мотора легко подключить, но его питание для мобильных устройств может оказаться сложной задачей. В этих примерах показаны схемы подключения пары двигателей постоянного тока 3–6 В, питаемых от аккумуляторной батареи 7,4 В (2 батареи 18650). Выберите контроллеры из списка и используйте электрические схемы для завершения проекта. Для удобства вы также можете добавить эту страницу в закладки и посетить ее в следующий раз, когда будете создавать мобильного робота.
В этой статье я собрал самые популярные или распространенные конфигурации для подключения контроллеров двигателей L298N (техническое описание) и L293D (техническое описание) к Raspberry Pi и Arduino (Uno, Nano, NodeMCU). Я составил это руководство, чтобы хранить все ресурсы и электрические схемы в одном месте.
Для удобства навигации вы можете щелкнуть ссылки ниже, чтобы найти электрическую схему на этой странице.
Схемы контроллера двигателя Raspberry Pi
Напоминаем, что Raspberry Pi использует оба Broadcom и физические номера контактов для контактов GPIO. Контакты Broadcom — это ссылка GPIOXX, а физические контакты — это номера, соответствующие физическому расположению каждого контакта в заголовке. Мы будем ссылаться на контакты Broadcom GPIOXX на схемах подключения ниже. Итак, с учетом сказанного, вот коллекция популярных схем подключения контроллера двигателя Raspberry Pi.
Нажмите для распиновки Raspberry Pi Zero W
L298N Схема подключения Raspberry Pi
Для этого приложения вы подключите L298N сигнальные булавки следующим образом:
L298N ENA TO GPIO18
L298N IN1 TO GPIO4
L298N IN2 — GPIO17
L298N IN3 TO GPIO27
L298N IN4 TO GPIO22
L298N ENB TO GPIO 298N. Аккумуляторная батарея.
Схема подключения L293D Raspberry Pi
L293D подключается аналогично. Вам понадобится макетная плата для подключения L293D. Вот сигнальные контакты между контроллерами.
Вот сигнальные контакты между контроллерами.
L293D Включить 1 на GPIO18
L293D IN1 — GPIO4
L293D IN2 — GPIO17
L293D IN3 — GPIO27
L293D IN4 — GPIO22
L293D Enable 2 — GPIO12
Вы можете питать Raspberry Pi от аккумуляторной батареи 5 В 2 А.
Adafruit TB6612 с Raspberry Pi
Наконец, вы можете использовать TB6612 с Raspberry Pi, если хотите использовать внешний источник питания двигателя постоянного тока. Вот как это подключено:
TB6612 AIN1 к GPIO18
TB6612 PWMA к GPIO4
TB6612 AIN2 к GPIO17
TB6612 STBY к GPIO27
TB6612 PWMB к GPIO22
TB6612 BIN2 к GPIO23
Если вы не используете Raspberry Pi, вы можете проверить схемы контроллера двигателя Arduino для своего проекта. Я собрал чертежи для Arduino Uno, Nano и NodeMCU.
Схемы подключения контроллера двигателя Arduino
Если вы предпочитаете использовать Arduino, вы можете ознакомиться с этим набором общих схем подключения контроллера двигателя Arduino.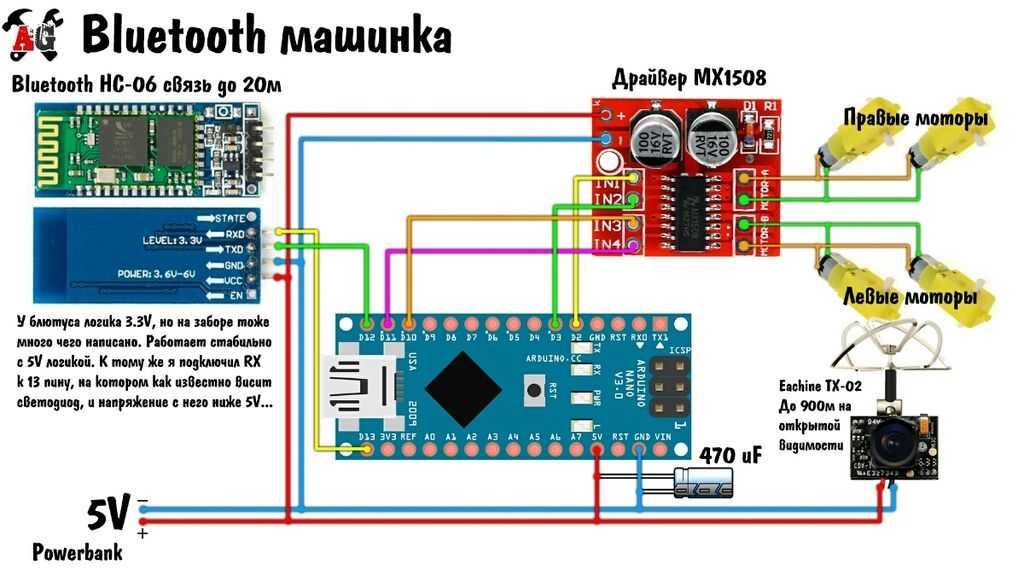 Чтобы узнать, как построить мобильного робота с помощью Arduino, ознакомьтесь с этим популярным руководством. Вы также можете принять участие в нашем электронном курсе по робототехнике, чтобы узнать больше о мобильных роботах, программировании, электронике и поучаствовать в автономных задачах. Запишитесь на курс здесь.
Чтобы узнать, как построить мобильного робота с помощью Arduino, ознакомьтесь с этим популярным руководством. Вы также можете принять участие в нашем электронном курсе по робототехнике, чтобы узнать больше о мобильных роботах, программировании, электронике и поучаствовать в автономных задачах. Запишитесь на курс здесь.
Схема подключения Arduino Uno L298N
L298N — довольно распространенный контроллер, используемый с Arduino Uno. Подключите сигнальные контакты следующим образом:
L298N ENA к цифровому 5
L298N IN1 к цифровому 2
L298N IN2 к цифровому 3
L298N IN3 к цифровому 4
L298N IN4 к цифровому 7
L298N ENB к цифровому 6
3 9000 питайте L298N от аккумуляторной батареи 7,4 В. Обязательно разделите землю между Arduino, L298N и аккумулятором. Контакт 12V на L298N подключается к шине Vcc на макетной плате. Наконец, подключите 5 В от Arduino к шине Vcc на макетной плате и к контакту 5 В на L298N. Вам не нужно запитывать Arduino с помощью USB-кабеля после того, как ваш блок питания подключен.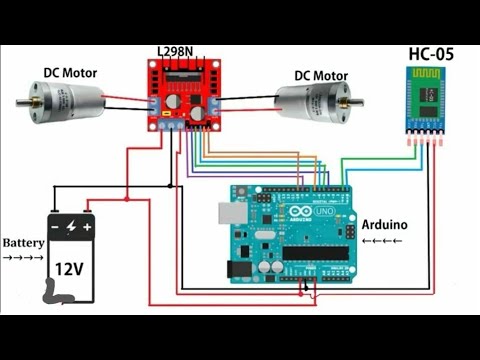
Готовы сделать своего робота автономнее? Из этого руководства вы узнаете, как запрограммировать контроллер мотора L298N с помощью Arduino.
Схема подключения Arduino Uno L293D
Вот схема подключения L293D для Arduino Uno. Сигнальные контакты подключаются следующим образом:
L293D Enable 1 to Digital 5
L293D IN1 to Digital 2
L293D IN2 to Digital 3
L293D IN3 to Digital 4
L293D IN4 to Digital 7
L293D Enable 2 to Digital 6
9000 , за которым следует питание между Arduino, контроллером мотора и аккумулятором.
Схема подключения Arduino Nano L298N
Создайте робота Arduino меньшего размера, используя Arduino Nano и контроллер двигателя L298N. Подключите сигнальные контакты следующим образом:
L298N ENA к цифровому 3
L298N IN1 к цифровому 2
L298N IN2 к цифровому 4
L298N IN3 к цифровому 6
L298N IN4 к цифровому 7
L298N ENB к цифровому 5
Затем прикрепите штифты на боковых выводах двигателя к боковым выводам. L298N. Затем подключите провода питания и заземления к макетной плате. Обязательно подключите питание и заземление к нано, контроллеру мотора и аккумулятору.
L298N. Затем подключите провода питания и заземления к макетной плате. Обязательно подключите питание и заземление к нано, контроллеру мотора и аккумулятору.
Схема подключения Arduino Nano L293D
Вот как подключить Arduino Nano к L293D контроллер двигателя. Подключите сигнальные контакты следующим образом. Затем соедините кабели питания, заземления и двигателя, используя схему ниже.
L293D Включение с 1 до 3
L293D In1 до 2
L293D In2 до 4
L293D IN3 до 6
L293D IN4 до 7
L293D Включение от 2 до 5
Nodemcu L298N WINGE DIAGEN 9000 2
NODEMCU L298N WIRE DIAGAME 9000
NODEMCU L298N. (L7805 — 5 В 1,5 А), электролитический конденсатор (1 мкФ/50 В) и керамический конденсатор (100 нФ — 0603). Сигнальные контакты между NodeMCU и L298N are given as follows:
L298N ENA to D2
L298N IN1 to D1
L298N IN2 to D3
L298N IN3 to D4
L298N IN4 to D6
L298N ENB to D5
NodeMCU L293D Wiring Diagram
You can also используйте L293D с вашим NodeMCU.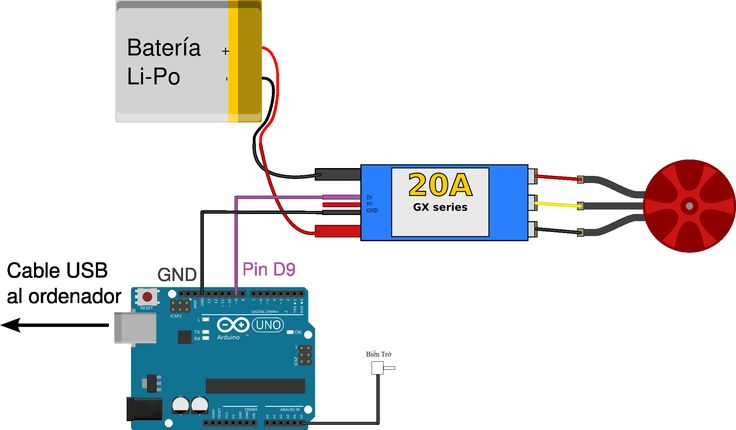 Вот как подключить сигнальные контакты:
Вот как подключить сигнальные контакты:
L293D Enable 1 к D2
L293D IN1 к D1
L293D IN2 к D3
L293D IN3 к D4
L293D IN4 к D6
L293D Enable 2 к D5
2 Наконец,
2 хотите проверить свою проводку и не отключать питание контроллера во время загрузки кода. Хорошей практикой является добавление выключателя питания для отключения аккумуляторной батареи, чтобы упростить проводку. Самое классное в этих конфигурациях то, что как только вы попробуете несколько из них, вы сможете сделать мобильного робота практически из чего угодно! Некоторые проекты включают Tiny Robot Cars, Robotic Tanks, Robot Cars и многое другое.
Вы построили какую-либо из этих конфигураций?
Надеюсь, эта статья окажется полезной для вашего следующего проекта мобильного робота! Отмечайте нас в своих проектах по робототехнике на Facebook и Instagram!
Тогда дайте мне знать, что вы думаете об этом посте в разделе комментариев ниже. И, если у вас есть предложение или исправление для какой-либо из этих схем подключения, обязательно включите это в свой комментарий.
Понравились эти статьи? Поддержите нашу работу, записавшись на онлайн-курс или подписавшись на ежемесячное членство. Наш сайт на 100% основан на нашем растущем сообществе, поэтому спасибо за вашу постоянную поддержку!
Arduino uno управляет двигателем постоянного тока в обоих направлениях вперед и назад с помощью драйвера двигателя L293d h-bridge
By EG Projects
В этом уроке я собираюсь научить вас, как управлять небольшим двигателем постоянного тока с Arduino Uno, используя L293D драйвер двигателя h-bridge ic. Я буду контролировать направление вращения (по часовой стрелке и против часовой стрелки) двигателя постоянного тока с помощью контроллера драйвера двигателя l293d и Arduino Uno. Учебное пособие поможет вам понять, как легко вращать двигатель постоянного тока как по часовой стрелке, так и против часовой стрелки, используя l29.3д и ардуино уно.
Микроконтроллеры не могут самостоятельно управлять двигателем постоянного тока
Все мы знаем, что сами микроконтроллеры не могут управлять двигателем постоянного тока.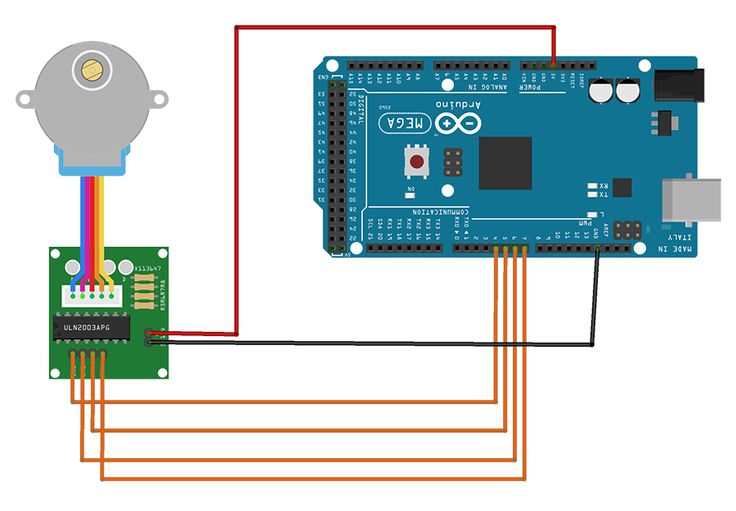 Поскольку ток, который они выводят на свои выходные контакты, недостаточен для привода небольшого двигателя постоянного тока. Обычно контакты ввода-вывода микроконтроллера выводят (20–40 мл ампер) токов. Выводы Arduino uno gpio могут выдавать 40 млн ампер непрерывного тока, но 40 мА недостаточно для привода двигателя постоянного тока.
Поскольку ток, который они выводят на свои выходные контакты, недостаточен для привода небольшого двигателя постоянного тока. Обычно контакты ввода-вывода микроконтроллера выводят (20–40 мл ампер) токов. Выводы Arduino uno gpio могут выдавать 40 млн ампер непрерывного тока, но 40 мА недостаточно для привода двигателя постоянного тока.
Внешняя схема с микроконтроллером для привода двигателя постоянного тока
Для вращения шпинделя или вала двигателю постоянного тока требуется от 100 до 250 миллиампер непрерывного тока. Поэтому очевидно, что нам нужен внешний источник с микроконтроллером для управления двигателем постоянного тока. Лучшим решением является использование транзисторов и полевых МОП-транзисторов для привода двигателя постоянного тока. Чтобы контролировать направление вращения двигателя, мы должны использовать несколько транзисторов и полевых транзисторов. Также мы должны ввести правильную логику в виде программного кода в Arduino, чтобы вращать двигатель в любом направлении.
Использование предварительно собранного драйвера двигателя постоянного тока
Наиболее популярными драйверами/схемами двигателя постоянного тока среди разработчиков встраиваемых систем является схема Н-моста. H-мост представляет собой комбинацию из 4 транзисторов или полевых МОП-транзисторов, расположенных в фиксированной линейной схеме. Логическая схема H-моста показана ниже.
Логическая схема Н-моста
Поскольку создание схемы Н-моста занимает много времени, а сама схема громоздка и занимает много места, мы можем использовать драйвер двигателя l293d. L293d представляет собой схему h-моста в небольшой микросхеме, которая проста в использовании и обращении, а также занимает меньше места, чем стандартная схема h-моста с линейными компонентами.
Если вы новичок и не знаете распиновку l293d, ее внутреннюю структуру и как ее эффективно использовать? Просто воспользуйтесь приведенным ниже руководством, оно поможет вам понять код Arduino, написанный ниже.
- L293D распиновка и работает.
Из приведенного выше руководства вы можете легко понять, как подключить двигатель с помощью контактов Arduino Uno и драйвера двигателя l293d. Каждый шаг взаимодействия нагрузки с l293d хорошо объяснен в приведенном выше руководстве.
Управление двигателем постоянного тока Arduino, драйвер двигателя L293d — двунаправленное управление двигателем — соединения
Я собираюсь использовать канал 1 драйвера двигателя l293d для управления и управления направлением вращения двигателя постоянного тока. Схема цепи проста. Заземление Pin#4 и 5 L293D. Подайте +5 вольт на вход Pin#1 l293d. Подайте +12 В на Pin#8 l293d. Arduino digital Pin#7 и 8 используются для управления направлением вращения двигателя. Подключить ардуино цифровой Pin#7 до pin#7 драйвера двигателя l293d и Pin#8 до pin#2 l293d.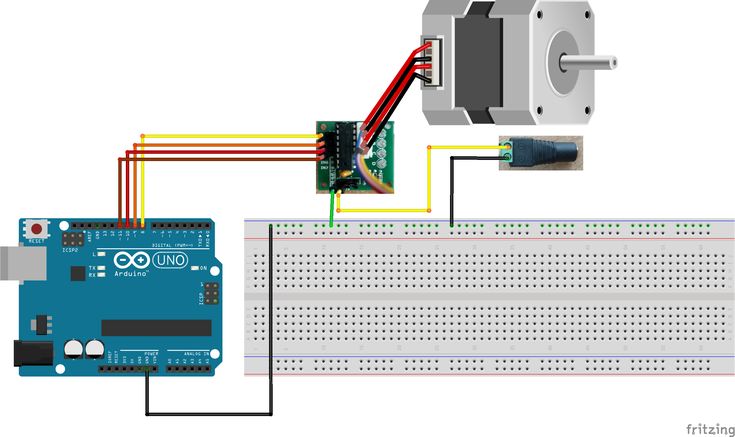 Теперь подключите двигатель к Pin#3 и 6 L293d. Заземление Pin#4 и 5 канала l293d-1. Arduino может питаться от персонального компьютера или USB-порта ноутбука. L293d питается от внешнего источника 12 вольт.
Теперь подключите двигатель к Pin#3 и 6 L293d. Заземление Pin#4 и 5 канала l293d-1. Arduino может питаться от персонального компьютера или USB-порта ноутбука. L293d питается от внешнего источника 12 вольт.
Драйвер двигателя L293d и контроллер с Arduino, управляющей направлением вращения двигателя постоянного тока3). Если вы используете другую сторону, убедитесь, что ваши соединения верны. Примечание. L293D может запускать два двигателя одновременно, вы также можете использовать его для запуска только одного двигателя. Как я сделал!
Драйвер двигателя L293d с двигателем постоянного тока, управляющим Arduino – Код проекта
Код проекта прост. Сначала я определил контакты № 7 и 8. Затем в функции настройки пустоты я определил контакты № 7 и 6 как выходные контакты. Теперь они могут выводить только цифровой сигнал. В функции void loop я делаю все, что нужно для управления направлением.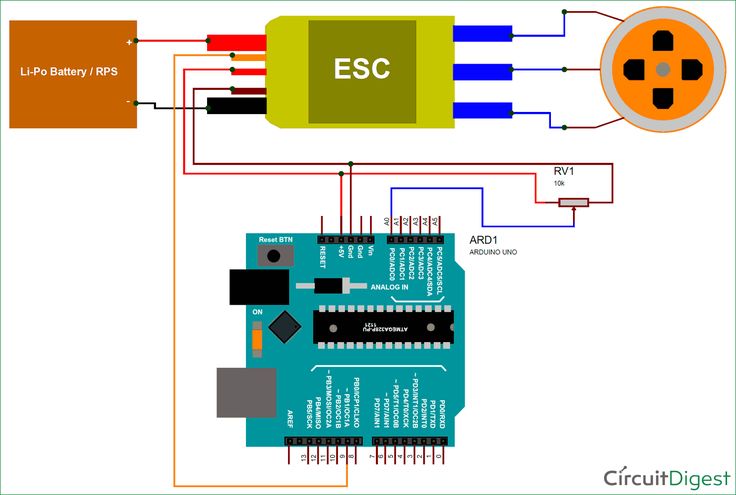
Сначала я даю задержку на 2 секунды, чтобы сделать схему стабильной. Обратите внимание, что функция arduino void loop такая же, как и у , в то время как (1) постоянно работает или повторяется.
Затем я сделал Pin # 7 HIGH и Pin # 8 LOW , этот сигнал поступает на L293d Pin # 2 и 7 , что заставило наш двигатель работать по часовой стрелке или против часовой стрелки в зависимости от вашей конфигурации. . Двигатель остается в этом состоянии в течение 4 секунд, после чего меняется состояние контактов.
Теперь оба контакта находятся в состоянии НИЗКИЙ, что означает ноль, который заставляет двигатель останавливаться, и двигатель останавливается на 3 секунды, этот шаг очень важен, потому что теперь мы хотим изменить направление, и если мы изменим его без какой-либо задержки, чем это может быть опасно для нашей цепи и водителя двигателя. когда двигатель вращается, он создает в нем обратную ЭДС (электродвижущая сила), а когда он останавливается, эта ЭДС передается обратно в цепь, что может быть вредным. Вот почему я остановил двигатель на 3 секунды.
Вот почему я остановил двигатель на 3 секунды.
Затем я снова вращаю двигатель, но на этот раз в противоположном направлении, установив Pin # 8 HIGH и 7 LOW . Двигатель теперь вращается в противоположном направлении в течение 4 секунд. После этого снова задержка и мотор останавливается. После этих всех шагов функция цикла повторяется, и схема выполняет те же шаги с самого начала.
Другие проекты, связанные с микроконтроллерами и драйвером двигателя l293d. Проекты с открытым исходным кодом. Код и схемы бесплатны, можно использовать и модифицировать любую вещь в проектах.
постоянного тока. Управление двигателем с помощью ШИМ-сигналов — Arduino — Robo India || Учебники || Изучите Ардуино |
Ардуино 2 Комментарии
В этом руководстве Robo India объясняется, как управлять скоростью двигателя постоянного тока с помощью сигналов ШИМ.
1.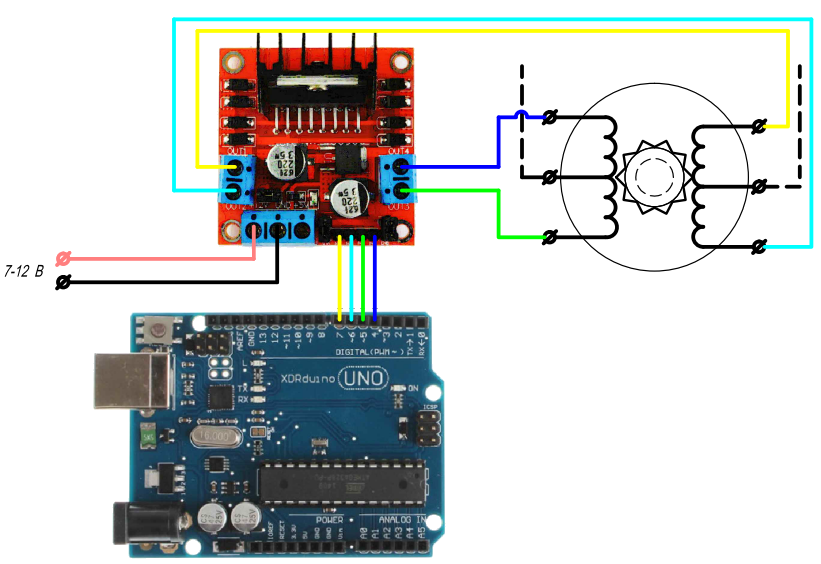 Введение
Введение
Скорость двигателя постоянного тока в целом прямо пропорциональна напряжению питания, поэтому, если уменьшить напряжение с 9 вольт до 4,5 вольт, наша скорость уменьшится вдвое по сравнению с первоначальной. Но на практике для изменения скорости двигателя постоянного тока мы не можем все время изменять напряжение питания. ШИМ-регулятор скорости для двигателя постоянного тока работает путем изменения среднего напряжения, подаваемого на двигатель
ШИМ-сигнал представляет собой прямоугольную волну высокой частоты (обычно более 1 кГц). Рабочий цикл этой прямоугольной волны варьируется для изменения мощности, подаваемой на нагрузку.
Входные сигналы, подаваемые на ШИМ-контроллер, могут быть аналоговыми или цифровыми сигналами в зависимости от конструкции ШИМ-контроллера. ШИМ-контроллер принимает управляющий сигнал и регулирует рабочий цикл ШИМ-сигнала в соответствии с требованиями. На приведенной ниже диаграмме показаны формы сигналов, полученные на выходе при различных требованиях к напряжению.
В этих волнах частота одинакова, но время включения и выключения разное.
1.2 Требуемое оборудование
1.3 Драйвер двигателя L293D IC Pin Out
Драйвер двигателя представляет собой модуль для двигателей, который позволяет вам управлять рабочей скоростью и направлением двух двигателей одновременно. Этот драйвер двигателя разработан и разработан. на базе микросхемы L293D.
L293D представляет собой 16-контактную микросхему с восемью выводами на каждой стороне для одновременного управления двумя двигателями постоянного тока. Для каждого двигателя имеется 4 контакта INPUT, 4 контакта OUTPUT и 2 контакта ENABLE.
Контакт 1: Когда Enable1/2 имеет ВЫСОКИЙ уровень, левая часть микросхемы будет работать, т. е. двигатель, подключенный к контактам 3 и 6, будет вращаться.
Контакт 2: Вход 1, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 1.
Контакт 3: Выход 1, этот контакт подключен к одной клемме двигателя.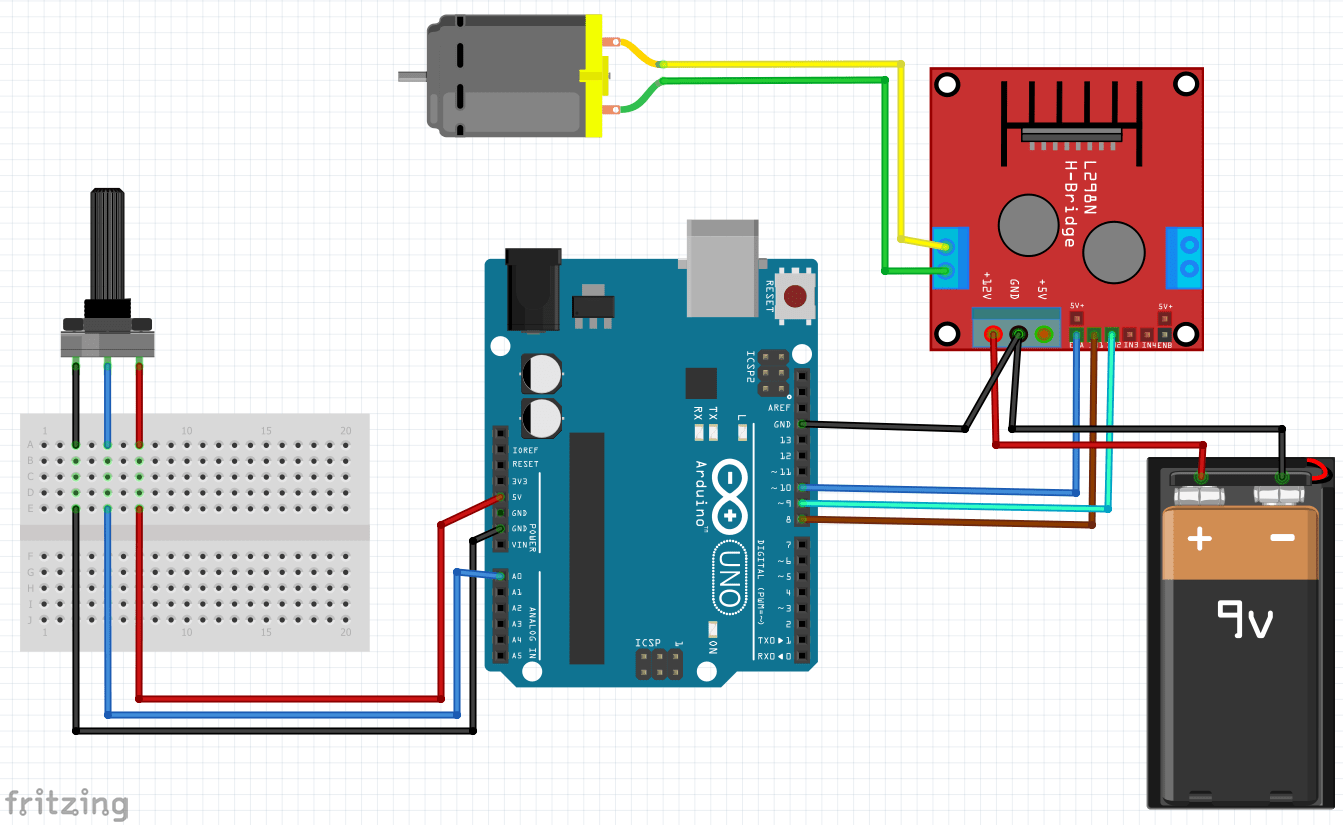
Контакт 4/5: контакты заземления
Контакт 6: выход 2, этот контакт соединен с одной клеммой двигателя.
Контакт 7: Вход 2, когда на этом контакте ВЫСОКИЙ уровень, ток будет течь через выход 2.
Контакт 8: VSS, этот контакт используется для подачи питания на подключенные двигатели от 5 В до 36 В максимум, в зависимости от подключенного двигателя.
Контакт 9: Когда Enable 3/4 имеет ВЫСОКОЕ значение, правая часть микросхемы будет работать, т. е. двигатель, подключенный к контактам 11 и 14, будет вращаться.
Контакт 10: Вход 4, когда на этом контакте ВЫСОКИЙ уровень, ток будет течь через выход 4.
Контакт 11: Выход 4, этот контакт подключен к одной клемме двигателя.
Контакт 12/13: контакты заземления
Контакт 14: выход 3, этот контакт соединен с одной клеммой двигателя.
Контакт 15: Вход 3, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 3.
Контакт 16: VCC, для подачи питания на микросхему, т. е. 5 В.
е. 5 В.
2. Соединения с Arduino
1. Модуль 5В (VCC) – Arduino 5В.
2. Заземление модуля — Заземление Arduino.
3. Модуль 1 – Arduino D8.
4. Модуль 2 – Arduino D9.
5. Модуль 3 – Arduino D10.
6. Модуль 4 – Arduino D11.
7. Модуль EN12 – Arduino D5.
8. Модуль EN34 — Arduino D6.
9. Модуль Двигатель Винтовые клеммы – двигатели постоянного тока.
10. Модуль питания VSS Винтовой зажим- Внешний источник питания 9В.
Убедитесь, что убрана предустановка Jumper на контактах Enable модуля, чтобы мы могли подключить вход ШИМ к этому контакту и управлять скоростью двигателей. Если мы подключим эти контакты к земле, то двигатель отключится.
3. Программирование:
Вот код для запуска этой схемы.
Вы можете скачать этот код (Arduino Sketch) отсюда.
//Учебное пособие от RoboIndia по управлению двигателем с использованием ШИМ-сигналов
//Требуемое оборудование: драйвер двигателя (от RoboIndia и Arduino)
// Двигатель А
const int inputPin1 = 10; // Контакт 15 микросхемы L293D
const int inputPin2 = 11; // Контакт 10 микросхемы L293D
// Двигатель Б
const int inputPin3 = 9; // Контакт 7 микросхемы L293D
const int inputPin4 = 8; // Контакт 2 микросхемы L293D
инт EN1 = 5; // Контакт 1 микросхемы L293D
инт EN2 = 6; // Пин 9микросхемы L293D
недействительная установка ()
{
pinMode(EN1, ВЫХОД); // куда подключен двигатель
pinMode(EN2, ВЫХОД); // куда подключен двигатель
pinMode (входPin1, ВЫХОД);
pinMode(inputPin2, ВЫХОД);
pinMode(inputPin3, ВЫХОД);
pinMode(inputPin4, OUTPUT);
Серийный номер . begin(9600);
Серийный номер .println("Введите значения от 0 до 255");
}
пустой цикл ()
{
если( Серийный номер .доступно())
{
int скорость = Серийный номер .parseInt(); //Получить значение от последовательного монитора
Серийный номер .println(скорость)
аналоговая запись (EN1, скорость); //устанавливаем скорость моторов
аналоговая запись (EN2, скорость); //устанавливаем скорость моторов
цифровая запись (входной контакт 1, ВЫСОКИЙ);
цифровая запись (inputPin2, НИЗКИЙ);
цифровая запись (входной контакт 3, ВЫСОКИЙ);
цифровая запись (inputPin4, НИЗКИЙ);
}
}
 begin(9600);
Серийный номер .println("Введите значения от 0 до 255");
}
пустой цикл ()
{
если( Серийный номер .доступно())
{
int скорость = Серийный номер .parseInt(); //Получить значение от последовательного монитора
Серийный номер .println(скорость)
аналоговая запись (EN1, скорость); //устанавливаем скорость моторов
аналоговая запись (EN2, скорость); //устанавливаем скорость моторов
цифровая запись (входной контакт 1, ВЫСОКИЙ);
цифровая запись (inputPin2, НИЗКИЙ);
цифровая запись (входной контакт 3, ВЫСОКИЙ);
цифровая запись (inputPin4, НИЗКИЙ);
}
}
begin(9600);
Серийный номер .println("Введите значения от 0 до 255");
}
пустой цикл ()
{
если( Серийный номер .доступно())
{
int скорость = Серийный номер .parseInt(); //Получить значение от последовательного монитора
Серийный номер .println(скорость)
аналоговая запись (EN1, скорость); //устанавливаем скорость моторов
аналоговая запись (EN2, скорость); //устанавливаем скорость моторов
цифровая запись (входной контакт 1, ВЫСОКИЙ);
цифровая запись (inputPin2, НИЗКИЙ);
цифровая запись (входной контакт 3, ВЫСОКИЙ);
цифровая запись (inputPin4, НИЗКИЙ);
}
}
4. Выход
После подключения скопируйте и вставьте этот код в Arduino IDE, а затем загрузите код. Откройте Serial Monitor и отправьте входные значения в Arduino. Вы можете управлять скоростью двигателя постоянного тока, отправляя различные значения от 0 до 255.
If you have any query please write us at [email protected]
Thanks and Regards
Content Development Team
Robo India
https://roboindia.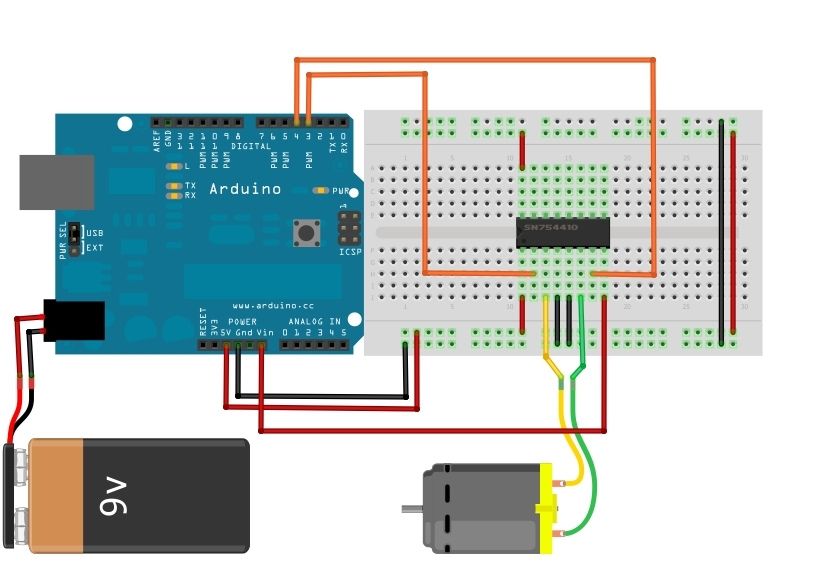 com
com
Как подключить драйвер двигателя к Arduino Uno?
Этот сайт содержит партнерские ссылки на продукты. Мы можем получать комиссию за покупки, совершенные по этим ссылкам.
0
акции
- Поделиться
- Твитнуть
Подключить драйвер двигателя к Arduino Uno относительно просто. Чтобы лучше понять весь процесс, мы будем использовать микросхему моста L298 для подключения к Arduino Uno, что позволит вам управлять двигателем постоянного тока. Обычно двигатель постоянного тока или двигатель постоянного тока считается наиболее часто используемым типом двигателя.
Что такое Ардуино?
Включите JavaScript
Что такое Arduino?
Содержание:
- Обзор
- Требования
- Подключение драйвера двигателя к Arduino Uno
- Настройка управления драйвером двигателя Arduino Uno
- Управление драйвером двигателя постоянного тока другой положительный. Когда вы подключите два провода к аккумулятору напрямую, ваш двигатель начнет вращаться.
Если вы поменяете провода, ваш мотор начнет вращаться в противоположном направлении. Чтобы лучше понять, в сегодняшней статье мы обсудим, как подключить драйвер двигателя к Arduino Uno.
Обзор
Чтобы управлять направлением вращения вашего двигателя постоянного тока без необходимости изменять подключение проводов, вы можете использовать схему, обычно называемую H-мостом. Н-мост — это схема, которая управляет двигателем в обоих направлениях.
Н-мост используется в различных приложениях, например, для управления роботами (часто это его основное применение). Его называют Н-мостом, так как в нем используются четыре транзистора, соединенных таким образом, что схематическая диаграмма будет выглядеть как буква Н.
Вы можете рассмотреть возможность использования дискретных транзисторов для создания этой схемы; однако в сегодняшней статье мы будем использовать микросхему H-моста L298.
Эта схема H-моста способна управлять скоростью, направлением вашего двигателя постоянного тока, а также шаговыми двигателями.Кроме того, он может управлять двумя двигателями одновременно. Он оснащен номинальным током 2А для каждого двигателя. Однако при этих токах вам потребуется использовать радиаторы.
Требования
Когда дело доходит до подключения драйвера двигателя к Arduino Uno, вам потребуется следующее:
- Двигатель постоянного тока
- Arduino Uno
- Мост L298 IC
- Макет
- 10 перемычек
Подключение драйвера двигателя к Arduino Uno
Соблюдая все требования, вы сможете подключить драйвер двигателя к Arduino Uno. В этом уроке мы будем подключать один двигатель к Arduino Uno. Для этого вы подключите Arduino к входу 1, который является контактом 5, а затем ко входу 2, который является контактом 7, и, наконец, включите 1, который является контактом 6 вашего L29.8 H-мост IC.
Контакты 5 и 7 предназначены для цифровых входов; то есть как выключено, так и включено входы.
С другой стороны, для контакта 6 требуется ШИМ или сигнал с широтно-импульсной модуляцией, который помогает контролировать скорость двигателя.Вход 1 контакта вашей микросхемы H-моста L298 будет подключен к контакту 8 вашего Arduino Uno, а вход 2 будет подключен к контакту 9. Оба контакта являются цифровыми контактами вашего Arduino Uno и помогают контролировать направление вашего двигателя.
Включено Вывод микросхемы L298 будет подключен к выводу 2 модуля Arduino Uno с широтно-импульсной модуляцией (ШИМ). Контакт 2 поможет контролировать скорость вашего двигателя. Чтобы установить значения контактов 8 и 9вашего Arduino, вам придется использовать функцию digitalWrite(). Более того, когда дело доходит до установки значения вывода 2, вам придется использовать функцию AnalogWrite().
Соедините компоненты! 🙂
Настройка управления драйвером двигателя Arduino Uno
- Сначала вы подключите 5-вольтовый контакт и землю (GND) вашей микросхемы H-моста L298 к 5-вольтовому контакту и земле (GND) вашего Arduino Uno.
- Подсоедините драйвер двигателя к контактам 3 и 2 вашего L29.8 H-мост IC.
- После этого вы подключите вход 1 вашей микросхемы H-моста L298 к контакту 8 Arduino Uno.
- Вход 2 вашей микросхемы H-моста L298 будет подключен к контакту 9 Arduino Uno.
- Затем вы подключите Enable 1 вашей микросхемы H-моста L298 к контакту 2 Arduino Uno
- Вывод Current Sensing A микросхемы H-моста L298 будет подключен к GND
- Используя USB-кабель Arduino, вы подключите ваш Arduino Uno, а затем загрузите программу на Arduino с помощью веб-редактора Arduino или Arduino IDE.
- Подайте питание на плату Arduino Uno с помощью надежного источника питания, USB-кабеля или аккумулятора.
Как только это будет сделано, ваш привод двигателя будет вращаться по часовой стрелке в течение примерно 3 секунд, после чего он будет вращаться против часовой стрелки еще 3 секунды.
Управление драйвером двигателя постоянного тока
Чтобы иметь полный контроль над драйвером двигателя постоянного тока, вам необходимо управлять скоростью и вращением.
Обычно это достигается сочетанием двух жизненно важных приемов:- Н-мост. Это необходимо для управления направлением вращения
- ШИМ. Идеально подходит для управления скоростью двигателя.
Обычно скорость драйвера двигателя постоянного тока регулируется с помощью переменного входного напряжения, и ШИМ считается распространенным методом, используемым для достижения этого с максимальной легкостью. Метод ШИМ включает в себя среднее значение входного напряжения, которое регулируется путем отправки серии импульсов «Выкл.» и «Вкл.».
С другой стороны, H-мост помогает управлять направлением вращения драйвера двигателя постоянного тока. Это достигается изменением полярности входного напряжения. Схема Н-моста оснащена четырьмя переключателями и двигателем в центре, образуя Н-образную схему.
Заключительные мысли
ИС L298 H-bridge представляет собой двойной двунаправленный драйвер двигателя, который относительно прост в эксплуатации и подключается к плате Arduino Uno.
 Когда вы подключите два провода к аккумулятору напрямую, ваш двигатель начнет вращаться.
Когда вы подключите два провода к аккумулятору напрямую, ваш двигатель начнет вращаться. Эта схема H-моста способна управлять скоростью, направлением вашего двигателя постоянного тока, а также шаговыми двигателями.
Эта схема H-моста способна управлять скоростью, направлением вашего двигателя постоянного тока, а также шаговыми двигателями.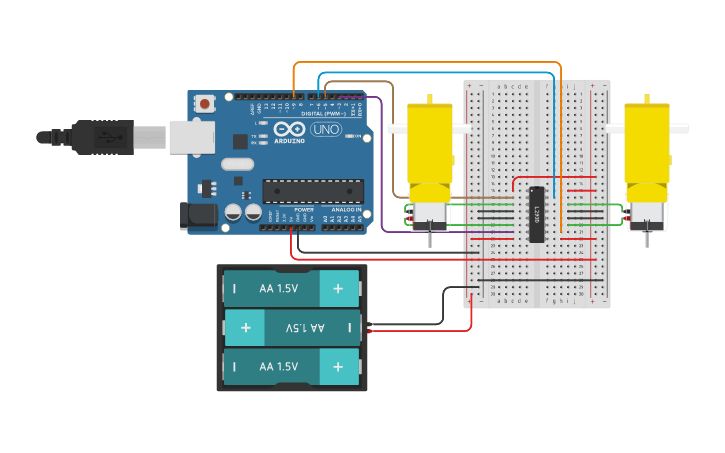 С другой стороны, для контакта 6 требуется ШИМ или сигнал с широтно-импульсной модуляцией, который помогает контролировать скорость двигателя.
С другой стороны, для контакта 6 требуется ШИМ или сигнал с широтно-импульсной модуляцией, который помогает контролировать скорость двигателя.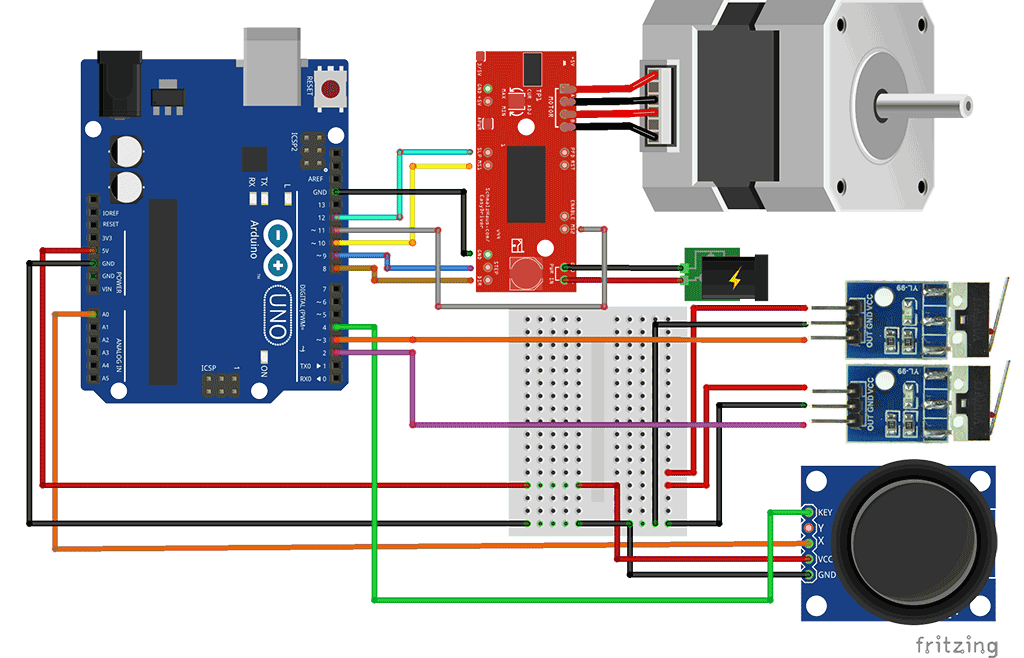
 Обычно это достигается сочетанием двух жизненно важных приемов:
Обычно это достигается сочетанием двух жизненно важных приемов: