Содержание
Arduino и двигатели||Arduino-diy.com
Одно из самых интересных в хобби-электронике – это использование двигателей для «оживления» ваших проектов.
Однако добавление мотора в ваш проект может оказаться непростой задачей, особенно, если вы до этого с приводами не работали.
Данная статья даст вам понимание принципов работы двигателей различных типов и пояснит многие необходимые нюансы и их особенности.
Принцип работы двигателей
Перед тем как разбираться, как именно моторы работаю, давайте сосредоточимся на том, для чего они используются. Моторы используют электромагнитные силы для обеспечения движения, преобразования электроэнергии в механическую.
Магнитные поля создают силу, которая может перемещать объекты. Каждый магнит имеет магнитное поле с северным и южным полюсом. Если вы попробуете приблизить два северных полюса двух магнитов, они будут отталкиваться. То же самое произойдет, если вы попытаетесь приблизить два южных полюса. Если полюса одинаковые, они будут отталкиваться друг от друга. Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Электродвигатель использует свойства магнитов отталкиваться и притягиваться для генерации движения. В обычном электродвигателе два магнита: постоянный и переменный. Переменный магнит называется электромагнитом. Электромагнит создается с помощью пропускания электрического тока через проводник. Постоянный магнит постоянно имеет магнитное поле (северный и южный полюса), а электромагнит генерирует магнитное поле только, когда через него пропускают электрический ток. Сила магнитного поля электромагнита может быть увеличена с помощью повышения тока, проходящего через проводник или методом формирования нескольких обмоток проводника.
В электродвигателе электромагнит устанавливается на ось таким образом, что он может свободно вращаться внутри магнитного поля постоянного магнита. В момент, когда через проводник проходит электрический ток, переменное магнитное поле взаимодействует со статическим магнитным полем магнита, возникают силы отталкивания и притяжения. Это заставляет электромагнит вращаться, возникает движение.
Это заставляет электромагнит вращаться, возникает движение.
Основные узлы электродвигателя:
— Постоянный магнит (магниты), в случае, когда он установлен неподвижно, называется статором;
— внутри статора есть катушка, которая установлена на оси и вращается, называется ротором.
Двигатели постоянного тока
Двигатели постоянного тока (DC motor) во многом являются самыми простыми электродвигателями. Большинство «щеточных» двигателей работают одинаково. Есть ротор и статор. Есть магниты на статоре и катушка на роторе с магнитным полем, которое генерируется с помощью подачи на нее силы тока. Есть щетки внутри мотора, которые заставляют двигаться ротор.
При использовании источника постоянного тока, для управления подобным двигателем практически ничего не надо. Скорость его вращения зависит от силы тока, которая поступает на катушки от источника питания к коммутатору.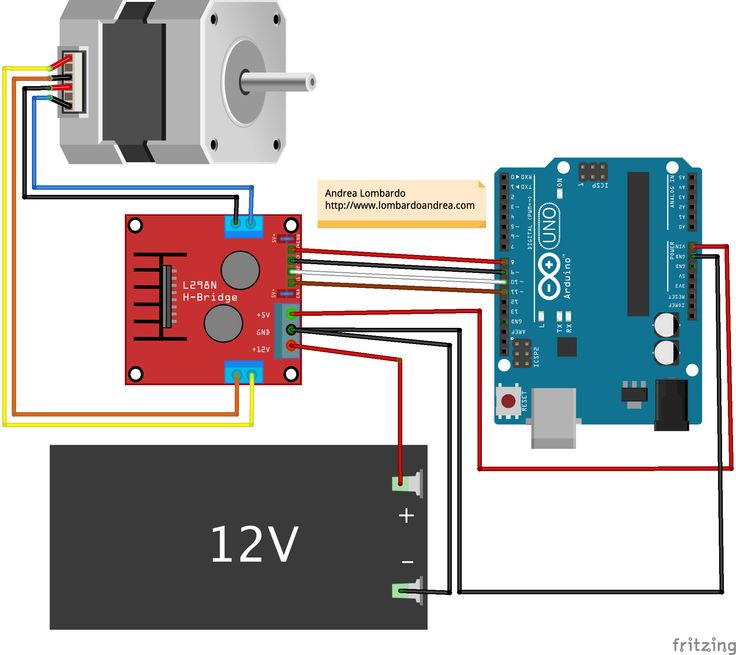
Для вращения оси двигателя в противоположном направлении, достаточно подключить контакты от источника питания к двигателю наоборот.
Шаговые двигатели
Как и двигатели постоянного тока, шаговые двигатели состоят из ротора и статора. Но, в отличие от других двигателей, ротор шагового двигателя представляет из себя постоянный магнит, который вращается внутри полей, создаваемых электромагнитами. Статор состоит из нескольких катушек, которые расположены в корпусе мотора. Когда ток проходит через катушки, подвижный вал двигателя (который является, по сути, постоянным магнитом) располагается в соответствии с генерируемым электромагнитной катушкой полем. Когда катушки заряжаются в определенной последовательности, вал двигателя выбирает новые положения и, соответственно, начинает вращаться.
Ротор приводится в движение последовательной подачей напряжения на катушки. Шаговый двигатель имеет возможность проворачивать ротор на определенный шаг в зависимости от разрешения импульса.
Шаговые двигатели являются отличным выбором для проектов на Arduino (и не только) по нескольким причинам. Они стоят относительно недорого, у них маленькая погрешность, следовательно – это идеальный выбор для управления с разомкнутой системой управления (без дополнительных датчиков положения рабочего органа). Шаговые двигатели будут обеспечивать заданное положение ротора исключительно в зависимости от поданной силы тока.
Эти двигатели предназначены для вращения в одном и противоположном направлении. Если вы подключите источник питания к контактам шагового двигателя, вал начнет вращаться. Если вы подключите проводники наоборот, он будет вращаться в противоположном направлении. Правда, стоит учесть, что в некоторых шаговых двигателях вращение в противоположную сторону невозможно. Перед его запуском, уточняйте этот момент.
Серводвигатели
Обычные серводвигатели для моделистов используются для поворота и удерживания определенной позиции в диапазоне от 0 до 180 градусов. Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
В большинстве случаем серводвигатели имеют три провода: питание, земля и сигнал. Обычно провод питания красного цвета, земля – черного или коричневого. Сигнал – желтый, оранжевый или белый.
В серводвигателях, которые, например, используются в системах управления радиоуправляемых машин, электродвигатель подключен к потенциометру. Стандартный приемник/передатчик посылает ШИМ-сигналы на серву. Электроника (небольшая плата-контроллер) внутри серводвигателя, переводит ширину импульса в положение. Когда на серву поступает сигнал к повороту, питание будет подаваться на мотор до тех пор, пока потенциометр не достигнет положения, которое будет соответствовать заданному предварительно через приемник/передатчик.
Сигнал управления является цифровым ШИМ сигналом с частотой 50 Гц. Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Импульс шириной 1.5 миллисекунды обычно устанавливает серводвигатель в «нейтральное» положение или 90 градусов. Импульс шириной 1.25 миллисекунд может установить его в 0 градусов, а импульс 1.75 миллисекунды в 180 градусов. Физические ограничения и время для различных серводвигателей могут отличаться, но его нейтральное положение всегда соответствует 1.5 миллисекундам.
Вибрационные двигатели
Вибрационные двигатели часто используются в мобильных устройствах для регистрации наличия движения.
Вибрационные моторы по конструктивному исполнению похожи на большинство шаговых двигателей и двигателей постоянного тока. Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать.
Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать.
Интенсивность вибрации зависит как от размеров двигателя, так и от размеров эксцентрика.
На видео сверху показан мотор, установленный на металлической основе. Обратите внимание, как лист металла совершает волновые движения под действием вибрации вибрационного мотора.
Как выбрать двигатель для проекта
Выбор типа двигателя для вашего проекта зависит от того, что именно вы собираетесь автоматизировать. Если вы хотите установить камеру и обеспесить ее поворот влево-вправо, идеальным выбором будет серводвигатель. Если вы передаете движение на зубчатые колеса с необходимостью обеспечения реверса, лучшим выбором станет шаговый двигатель.
Естественно, отличным выбором для управления вашим двигателем станет плата Arduino или ее клоны.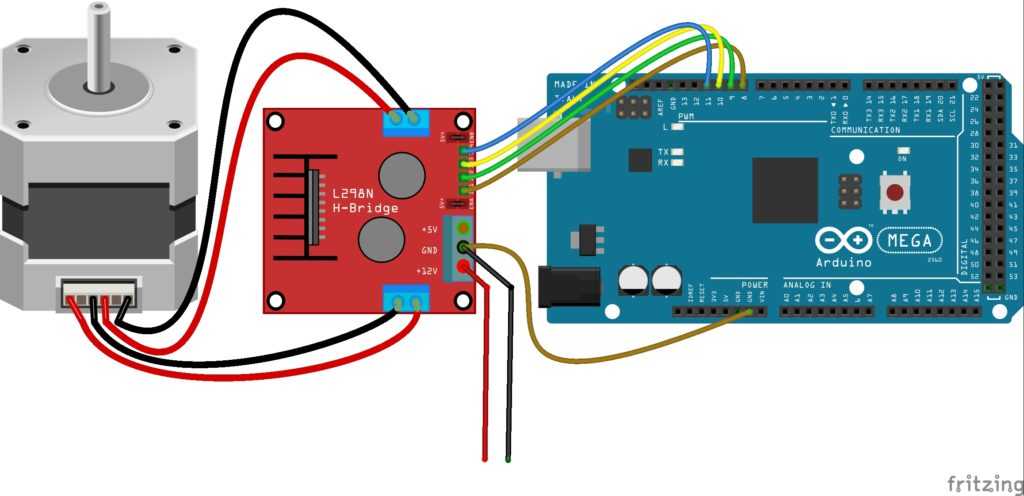 Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Дальше в статье приведена информация о том, как можно быстро «оживить» выбранный вами предварительно двигатель с использованием платы Arduino.
Использование шагового двигателя с Arduino
Стоит отметить, что «оживлять» свои проекты с помощью плат Arduino и оболочки Arduino IDE для их программирования очень легко из-за наличия большого количества уже готовых библиотек. Подключение шагового двигателя к плате Arduino отличается от подключения двигателя постоянного тока. Существует специальная библиотека и функция, встроенные в Arduino IDE. Более детально об этом вы можете почитать здесь.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Stepper -> stepper_oneRevolution
Данная программа дает возможность управлять уни- или биполярным шаговым двигателем после его подключения к цифровым пинам 8-11 на плате Arduino.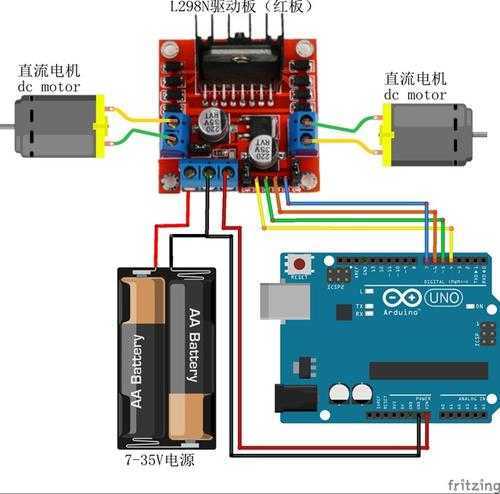 После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
Данный пример – отличное начало. Естественно, вы можете вносить свои коррективы в программу, подстраивая ее под свои задачи. Задержка указывается в миллисекундах, так что если вы не хотите выдерживать паузу между оборотами, можете выставить задержку delay(10). Или, для того, чтобы замедлить вращение можете изменить stepsPerRevolution и присвоить ему значение, например, (1000000).
Изменения скетча зависят от того, что именно вы хотите реализовать. Для лучшего понимания того, как именно происходит обмен данными между шаговым двигателем и платой Arduino, советую поэкспериментировать с другими примерами.
Использование двигателя постоянного тока / вибрационного двигателя с Arduino
В некоторых проектах нет смысла использовать микропроцессоры вроде Arduino. Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
В таком случае, мотор будет подключатся непосредственно к вашему источнику питания через выключатель, который соединен с позитивным коннектором вашего двигателя.
Использование серводвигателя с Arduino
Так же как и шаговые двигатели, для работы серводвигателей в оболочке Arduino IDE есть встроенная библиотека.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Servo -> Knob
Данная программа обеспечивает управление серводвигателем, который подключен к 9-му ШИМ пину платы Arduino. Потенциометр, в свою очередь, подключен к аналоговому пину 0 и обеспечивает управление положением серводвигателя, посылая напряжение, пропорциональное сопротивлению на пин А0 платы Arduino. Скетч, который «залит» в плату Arduino, интерпретирует сигнал в импульсы, которые посылаются на серводвигатель. Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Подключение подключение бесколлекторного двигателя к ардуино с помощью современных коллекторов
Как правильно установить бесколлекторный двигатель с использованием системы адруино, что в наше время употребляется с современными моторами, применение регуляторов в таких двигателях, принципы и схемы воздействия приборов управления.
В этой статье осмотрится регулирование стремительностью, верчения бес сенсорного и бесколлекторного электродвигателя долговременного потока Sensorless BLDC outrunner motor, почасту приспособленного для создания дронов через ESC (Electronic Speed Controller – электрический регулятор силы и платы Arduino.
Сейчас замечается самобытный интерес к сооружениям разнообразных летательных устройств – дронов, вертолетов и т. Теперь их позволено просто сотворить вручную из-за великой численности конструктивности аппарата в интернете. Все они парящие аппараты употребляют ради своего процесса так именуемых бесщеточных (бесколлекторные) электродвигатели долговременного потока (BLDC — Brushless DC Motor).
Все они парящие аппараты употребляют ради своего процесса так именуемых бесщеточных (бесколлекторные) электродвигатели долговременного потока (BLDC — Brushless DC Motor).
Что являют собой похожие движки? Отчего собственно они в наше время употребляются в всевозможных относящихся дронах? Как нужно приобрести похожий движок и включить его к микроконтроллеру? Что вообще ESC и зачем важно его задействовать?
Решения всех этих вопросов можно найти в этой статье.
Подключение бесколлекторных двигателей для ардуино
Бесколлекторные движки создались предельно не так давно и изготавливаются ради оптимизации электродвигателей неизменного тока.
Бесколлекторные двигатели насыщаются трехфазным неустойчивым потоком. Они эффективно функционируют в более размашистым спектре витков и имеют большие значения КПД. Но и тут установка мотора проще, нет щеточного узла, что безостановочно трется с ротором и организовывает искры. Следовательно они абсолютно не изнашиваются.
По составу бесколлекторные двигатели поделаются две категории: inrunner и outrunner. Моторы inrunner обладают размещением по внутренней плоскости туловища обвивки, и циркулирующий внутри электромагнитный ротор.
Движки outrunner обладают недвижимыми намотками внутри двигателя, кругом каких вертится корпус с пристроенными на вовнутрь стенку долговременными магнитами. Переключение в бесколлекторном движке (БД) исполняется и руководится с использованием электроники.
Контроллеры бесколлекторных двигателей ESC регуляторы
Для управления без распределительного двигателями применяют специфические регуляторы — ESC (Electric speed controller — электрический датчик быстроты, регуляторы. Задача контроллера находится так, дабы подать энергию долговременного потока от батареи к трехфазному бес распределительному мотору. Для подачи мощности регулятор употребляет MOSFET — ключи силы, что могут раскрываться и закрываться в секунду.
Ежели силы одного ключа мало, употребляется немного ключей, аннексированных единовременно. Поочередное включение/выключение этапов удерживает циркуляцию движка. За изменением фаз наблюдает контроллер контроллера.
Поочередное включение/выключение этапов удерживает циркуляцию движка. За изменением фаз наблюдает контроллер контроллера.
Механическая программа ESC управления: Требуемые составляющие
· Плата Arduino — бесколлекторный двигатель непрерывного потока).
· ESC (20A) (электронный датчик быстроты)
· Родник питания (12V 20A).
· Потенциометр
· Соединение к плате Arduino
Программа включения бесколлекторного мотора с ESC-коммутатором к плате Arduino представлена на рис.
Ради осуществления включения управляющего устройства к плате Arduino употребляется 2 шнура:
· темный – земля;
· светлый – руководящий.
Красный шнур редуктора представляется не началом, а выходом с усилием +5В, что позволено употреблять ради направления силы платы Arduino. Свидетельства потенциометра возможно употреблять для руководства стремительностью движка. Для руководства ним нужно употреблять Arduino-библиотеку Servo.
Наименьшие и наибольшие значения движущегося сигнала 800 мк\сек и 2300 мксек.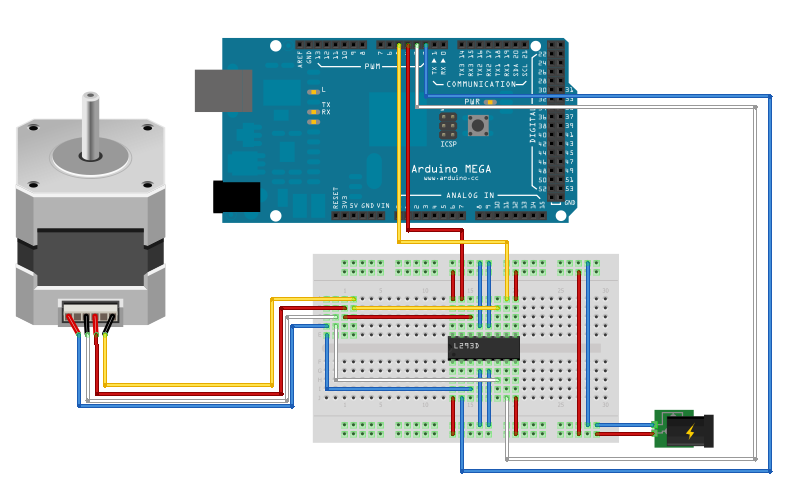 Затем после установки скетча на плату Arduino показано что сердце аппарата не включается и не отзывается на движения потенциометра.
Затем после установки скетча на плату Arduino показано что сердце аппарата не включается и не отзывается на движения потенциометра.
Стабилизатор нужно отрегулировать, дабы он задействовал малые и наибольшее суммы. Для этого перед подачей силы на стабилизатор, экспонируется потенциометр в самое большое значение. Направляется питание. Когда уже слышно «пиканье» движка. Перемещается потенциометр в маленькое значение, должно быть слышно три пиканья. Тогда редуктор откалиброван. Далее желательно повторить потенциометр, нужно скоординировать живость мотора.
Принцип воздействия BLDC движков
Бесколлекторные электродвигатели хронического потока (BLDC двигатели) в момент движения зачастую употребляются в домашних пропеллерах и электрических передвигающихся транспортных аппаратах из-за их плавного и легкого вращения.
В силу от иных электродвигателей долговременного потока BLDC движки включаются с использованием тремя концами, торчащих из них, но таков любой шнур создает личную фазу, тогда и приобретаем многофазный моторчик.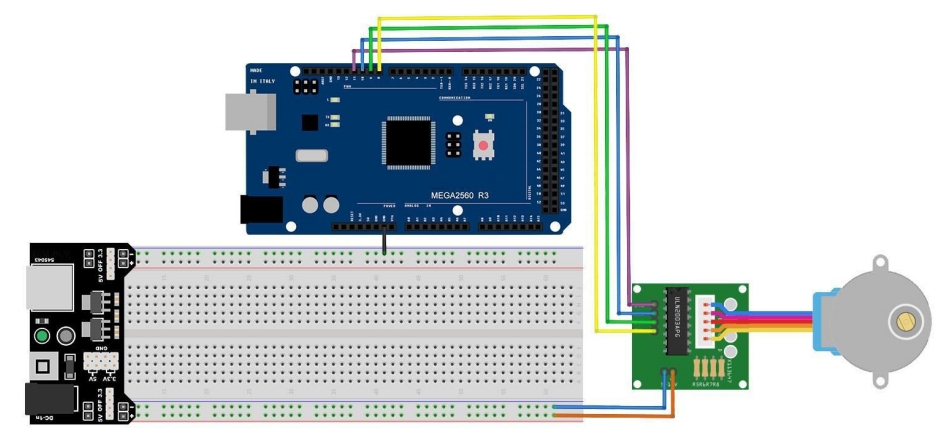
Впрочем BLDC причисляются к движкам непрерывного тока они руководятся с поддержкою очередности толчков. Для переустановки усилия хронического тока в стройность толчков их по 3х кабелям употребляется регулятор ESC (Electronic speed controller).
В какой-то момент работы топливо накладывается исключительно на пару из фаз, это значит что гальваническое течение забегает в сердце сквозь одну фазу, и выходит через иную. Когда в последствии такого движения запитывается катушка внутри мотора, это вызывает к тому, что магниты сглаживаются по касательству к катушке с таким же окончанием.
Впоследствии регулятор ESC подает топливо на остальные два кабеля (или фазы) и такой ход перемены шнуров, на что издается сила, длится непрерывно, что принуждает электродвигатель циркулировать.
Быстрота вращения мотора в зависимости от быстроты подачи питания на катушку мотора, а направленность циркуляции – от распорядка замены фаз, на что попеременно направляется мощность. Используют разные разновидности BLDC моторов – тут осмотрим генеральные с имеющихся.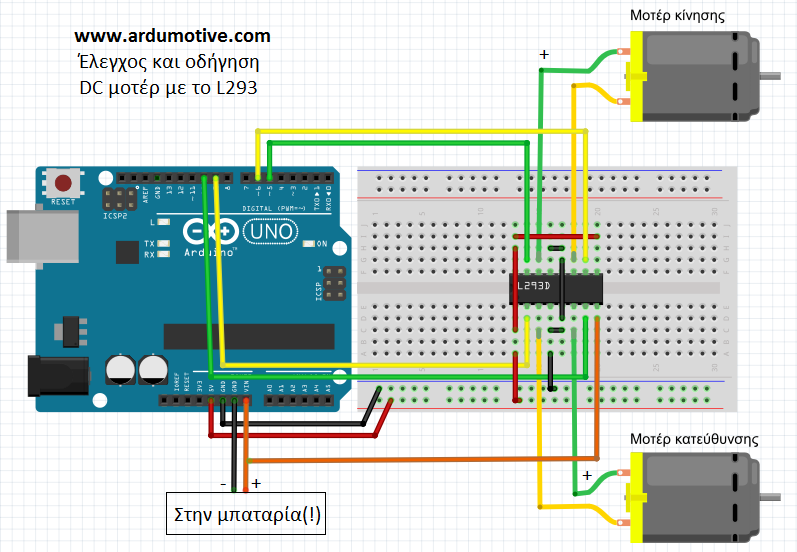
Распознают Inrunner и OutRunner BLDC двигатели.
· В Inrunner движках магниты ротора ориентируются внутри статора с обвивками,
· а в OutRunner движках магниты находятся наружно и вертятся кругом недвижимого статора с намотками.
Собственно означает что в Inrunner (по данному способу проектируется большое количество движков хронического потока) ось внутри мотора вертится, а основа мотора так и будет стоять на месте. А в OutRunner электродвигатель вертится кругом оси с катушкой, что также будет неподвижной.
OutRunner движки очень комфортны для использования в электрических мопедах, поелику наружная кора мотора естественно задействует к движению колесо аппарата, и это разрешает наладится без установки сцепления.
Так же OutRunner движки гарантируют сильный ворочающий момент, который осуществляет их еще совершенным избранием для употребления в гальванических перемещающихся приборах и дронах.
Следовательно и в этой заметке будет анализироваться присоединение к платы Arduino мотора OutRunner вида. Имеется еще подобный элемент BLDC моторов как бесстержневой (coreless), что обретает использованием в маленьких дронах.
Имеется еще подобный элемент BLDC моторов как бесстержневой (coreless), что обретает использованием в маленьких дронах.
Такие электродвигатели функционируют по изрядно другим методикам, но анализ их работоспособности не вписывается в границы исходной статьи.
Образчик употребления
К примеру настройка самодействующего калибровку ESC-редуктора при запуске скетча Arduino. Тут будет нужно иметь последующие приборы:
· Плата Arduino Uno – 1;
· Плата установочная – 1;
· Сердце мотора бесколлекторное – 1;
· ESC-устройство контроля– 1;
· Потенциометр 10 кОм – 1;
· Источник силы 12 В – 1;
Для осуществления калибровки в настройках setup вырабатывается эмуляцию передачи потенциометра м наибольшее и наименьшее размещение. BLDC движки с преобразователями (Sensor) и без них (Sensorless).
В использовании BLDC агрегатов, что крутятся плавно, без резких движений, надобна возвратная связь. Следовательно регулятор ESC вынужден быть настроен на позиции и полюса магнитов ротора дабы конкретно подсоединять статор.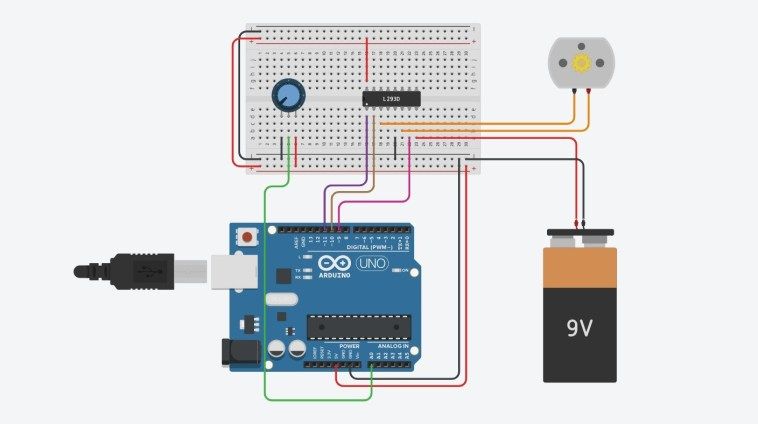
Такое можно осуществить двумя методами: основной из них состоит в установке измерителя Холла внутри мотора. Преобразователь Холла должен открывать магнит и транслировать информацию об сделанном в проверщик ESC. Данный элемент движков именуется Sensor BLDC (с регулятором) и он обретает использование в электрических передвигающихся транспортных агрегатах.
Второй способ высказывания позиции магнитов содержится в содействии оборотной ЭДС (электродвижущей силы), Формировавшийся катушками когда магниты встречаются с ними. Совершенством данного способа представляется то, что он не спрашивает употребления каких-то добавочных установок (датчик Холла) – фазово чувствительное проведение независимо от них применяется в свойстве возвратной связи вследствие присутствия возвратной ЭДС.
Такой прием употребляется в моторе, показанном в этой статье, и собственно его чаще приспосабливают в дронах и прочих летательных приборах. Огромный вращающийся момент, что имеет большое значение дабы отколоть парящий орган от земли;
- · данные моторы приемлемы в объеме OutRunner, они помогают наладится без употребления сцепления в установке дрона;
- · небольшой уровень пульсаций во время движения, что тоже авторитетно для недвижного остановки дрона в воздухе;
- · превосходное отношение силы к весу мотора.
 Такое крайне хорошо употреблять на носящихся аппаратах дабы каждый элемент его установки обладал максимально минимальный вес.
Такое крайне хорошо употреблять на носящихся аппаратах дабы каждый элемент его установки обладал максимально минимальный вес.
 Такое крайне хорошо употреблять на носящихся аппаратах дабы каждый элемент его установки обладал максимально минимальный вес.
Такое крайне хорошо употреблять на носящихся аппаратах дабы каждый элемент его установки обладал максимально минимальный вес.Обыкновенный электродвигатель хронического потока, гарантирующий подобной же движущий пункт как и BLDC моторе, будет по крайней мере вдвое тяжелее того. Отчего дроны и вертолеты употребляют собственно BLDC движках?
Теперь имеется много всевозможных разновидностей дронов – с парами лопастями, с четырьмя штуками т. Но они создаются только из BLDC двигателей. Отчего собственно такие, ведь BLDC движки обходятся подороже нежели простые электродвигатели долговременного тока?
Почему необходим регулятор ESC
Уже понятно что для работоспособности BLDC движков важен некоторый регулятор, что реорганизует силу непрерывного потока от батарейки в методичность импульсов, направляемую в нужном распорядке на кабели (фазы) движков. Данный регулятор именуется ESC (Electronic Speed Controller – электрический регулятор быстроты).
Фундаментальной ответственностью предоставленного регулятора представляется верный впуск питания на шнуры мотора дабы он обращался в подходящем движении.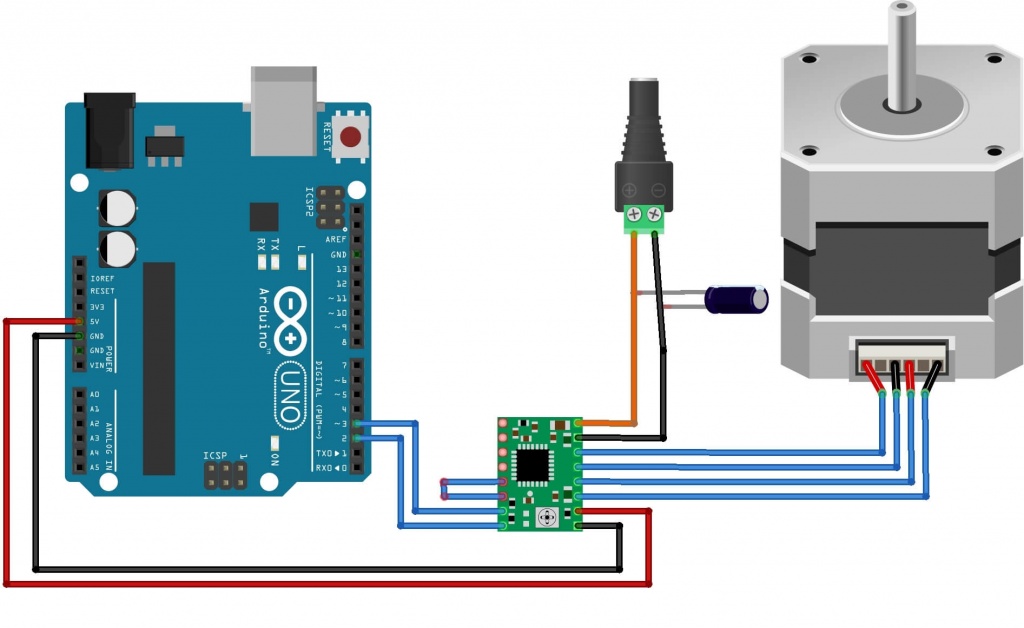 Это делается с учетом возвратной ЭДС (back EMF) с любого из кабеля и направления мощности на катушку тогда, когда магнит встречается с ней. Внутри аппарата датчик ESC охватывает довольное количество всевозможной электроники и если нужно, то следовательно полно изучить его строение по материалам в сети интернета. Ключевые составляющие его аппарата.
Это делается с учетом возвратной ЭДС (back EMF) с любого из кабеля и направления мощности на катушку тогда, когда магнит встречается с ней. Внутри аппарата датчик ESC охватывает довольное количество всевозможной электроники и если нужно, то следовательно полно изучить его строение по материалам в сети интернета. Ключевые составляющие его аппарата.
Не стартуют электромоторы
· Проконтролируйте присоединение движков ESC-коммутатору, ESC-регулятора к блоку силы и ардуино.
· Осуществить также важно калибровку ESC-резистора.
· Регулирование быстротой циркуляции на основании широтно-импульсной модуляции.
· Регулятор ESC способствует управлению стремительностью верчения BLDC мотора с учетом предупреждения ШИМ создаваемого на него апельсиновый проводок
Способ руководства таким мотором весьма подобен на регулирование сервомоторами. Знак ШИМ, доставляемый на датчик ESC, вынужден обладать ступенью 20ms, а коэффициент наполнения данного ШИМ значения должен предназначать быстроту вращения BLDC аккумулятора.
Поелику несомненно такой метод применяется ради руководства углом разворота сервомотора, тогда для руководства BLDC движком возможно пользоваться библиотекой руководства сервомоторами. Battery Eliminator Circuit (BEC) – цепь, без батареи. Каждый регулятор ESC поставляют с данной схемой.
Такая схема ликвидирует надобность в употреблении разной батареи для заживления микро контроллера, ведь она потребляется в доставленном способе и не потребуется раздельный родник кормления для платы Arduino – регулятор ESC самостоятельно питает плату Arduino контролируемым усилием питания +5V.
В разнообразных резисторах ESC применяются неодинаковые схемы управления доставленной мощности, но в неких ситуациях схема широко употребляемая с линейным руководством . Интегрированное ПО.
Произвольный датчик ESC охватывает в собственном ПЗУ установленную практическую систему, прописанную изготовителем прибора. Такая установка помогает описывать идею работоспособности регулятора. преимущественно знаменитыми интегрированными кодами для таких ESC представляются Traditional, Simon-K и BL-Heli. Эта система может модифицироваться человеком.
Эта система может модифицироваться человеком.
Кое-какие фразы, употребляемые в теме BLDC и ESC Коротко предоставим генеральные из данных слов:
Braking (торможение) – описывает пару живо BLDC электродвигатель сможет выключить свое движение. Это значительно для летательных приборов поелику им важно зачастую переменять число витков мотора в секунду дабы лавировать в воздухе.
Soft Start (плавный пуск, старт) – эта возможность исключительно главная для BLDC движков если закручивающий момент от него на движущейся механизм (колесо и тд.) подается посредством механизма подачи, нормально заключающийся из шестерен.
Гладкий запуск означает, что электродвигатель не инициирует вращения мгновенно с наибольшей живостью, а может добавлять свою быстроту верчения потихоньку самостоятельно от того, с какой стремительностью наращивается распоряжающиеся реакция. Плавный запуск основательно сокращает амортизацию шестерен, помещающихся в трансмиссионный агрегат.
Motor Direction (направление верчения мотора) – в основном направленность верчения BLDC движков не переменяется в движении эксплуатации, впрочем когда производства и тестирования произведения аппарата возможно понадобиться модифицирование стороны верчения движка, нормально такое позволено совершить попросту сменив друг с другом какие-то два шнура аппарата.
Low Voltage Stop (остановка при низком усилии мощности). Естественно BLDC движки градуируют для того чтоб при одной степени ворочающего действия быстрота его циркуляции была выдержанной. Впрочем такого значения нелегко добиться так как спустя некое время усилие питающей батареи снижается. Дабы предупредить такое простые резисторы ESC переделывают подобным типом для остановки произведение BLDC мотора если усилие питающей батареи спускается вниз поставленной рубежа. Впрочем данная методика хороша при содействии BLDC движков в дронах.
Response time (время отклика, реакции или ответа).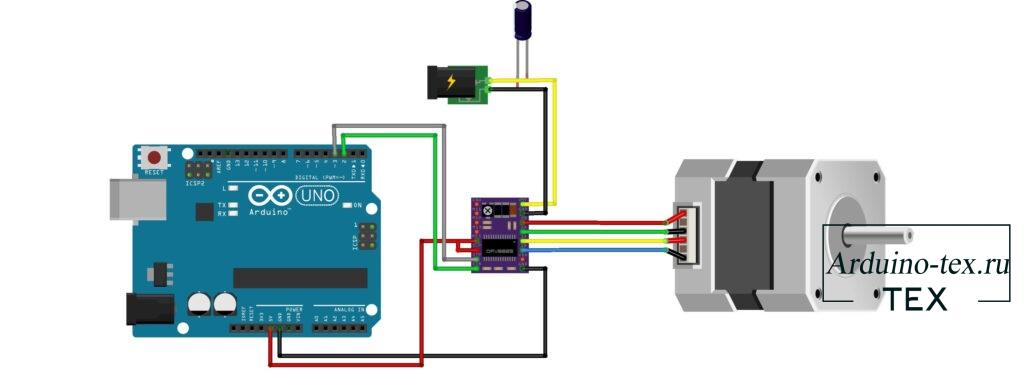 Обозначает дееспособность мотора скоро переменять быстроту циркуляции при смене ворочающего момента. Нежели время реакции меньше, тогда управление над инструментом улучшается.
Обозначает дееспособность мотора скоро переменять быстроту циркуляции при смене ворочающего момента. Нежели время реакции меньше, тогда управление над инструментом улучшается.
Advance (движение вперед). Эта задача представляется необыкновенной больной темой для BLDC моторов. Все BLDC движки располагают мелкий сходственный баг. Эта задача обусловлена тем, что если шпулька статора запитана, ротор передвигается впредь поелику там существует безостановочный магнит.
И ежели распоряжающееся сила с нее снимается (дабы дать ее на последующую катушку) ротор движется вперед чуть-чуть далее нежели предвидено методикой работоспособности агрегата.
Это нежелательное углубление мотора впредь в английском нарекают “Advance” и оно возможно будет приносить к ненужным циркуляциями, перегреву и гулу при движении приборов.
Следовательно превосходные резисторы ESC усердствуют по способности ликвидировать данный результат в движении BLDC моторов. У определенных контроллеров ESC нет конечных кабелей, тогда уже надо будет добавлять линии от BLDC мотора к коммутаторам регулятора ESC.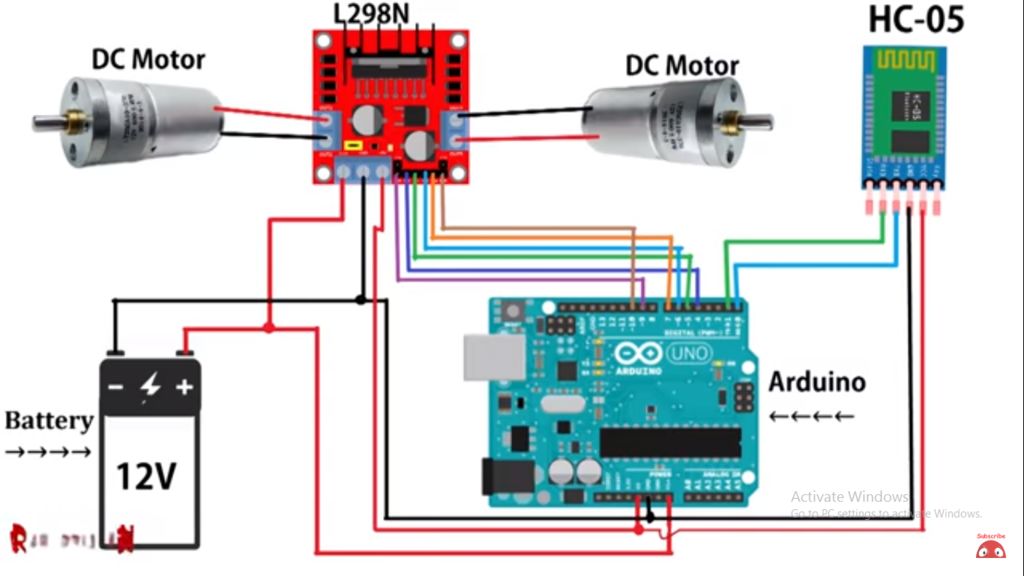
Программа BEC (Battery Eliminator circuit) в приборе ESC будет свободно гарантировать систематическое усилие +5V, следовательно можно естественно пользоваться для усиления платы Arduino.
Для руководства стремительностью циркуляции мотора в схеме употребляется потенциометр, присоединенный к системе A0 платы ардуино.
Пояснение программки для Arduino
Для руководства BLDC движком нужно переформировывать ШИМ предупреждение с частотой 50 Гц и заменить от 0 до 100% знаком заполнения. Свойство коэффициента наполнения будет создаваться с поддержкою потенциометра.
Это значит циркуляцию потенциометра, нужно будет управлять стремительностью верчения инструмента. Его регулирование весьма схоже на регулировку сервомотором с поддержкою ШИМ 50 Гц, следовательно в предоставленном случае употребляют такую же библиотеку, что воспользовались ради руководства сервомотором.
Испытание произведения схемы
Нужно произвести все важные составления в методике, загрузить программу в плату ардуино и подключить к питанию на регуляторе ESC. Удостоверитесь что BLDC электродвигатель точно прикреплен, по-иному он будет скакать во время работы.
Удостоверитесь что BLDC электродвигатель точно прикреплен, по-иному он будет скакать во время работы.
Если вы подадите силу на регулятор ESC будет слышно приветственный звук и будет выпускать сей шум до тех пор пока не пристроится руководящее предупреждение установленного значения (в установленных пределах). Инициируйте потихоньку циркуляцию потенциометра дабы на его выходе усилие разнилось от 0, и шум остановился. Такое действие означает, что установлен на регулятор ШИМ сигнал минимум позволительно степени.
При следующем кружении ручки потенциометра электродвигатель активизируется при медленном вращении. При другом повороте ручки аппарата и росте усилия на выходе быстрота верчения мотора будет расти. Если сила достигнет максимальной возможной величины, сердце аппарата остановится.
Как использовать двигатели постоянного тока в Arduino
РЕКОМЕНДУЕМ ДЛЯ ВАС:
Программное обеспечение SMS-шлюза
Ozeki предлагает вам выдающийся
SMS-шлюз
технологии.
Используйте наш SMS-сервер
продукты на Windows, Linux или Android
С# SMS API
Разработчики могут использовать наш C# SMS API .
для отправки SMS из C#.Net.
C# SMS API поставляется с полным
исходный код
PHP SMS API
ozeki PHP SMS-шлюз
программное обеспечение может использоваться для отправки SMS с PHP
и получать SMS с помощью PHP на
Ваш сайт
SMS-шлюз SMPP
Поставщики услуг SMS используют наши
Решение SMPP-шлюза ,
который предлагает высокопроизводительный сервер SMPP
и SMPP клиент шлюз
с потрясающими возможностями маршрутизации
Озеки 10
В этом руководстве вы сможете получить некоторую информацию о двигателях постоянного тока Arduino.
Двигатель постоянного тока является самым простым из электродвигателей и используется во всех типах электроники для хобби.
В этом руководстве представлена основная информация о двигателях постоянного тока, а также о том, как их можно подключить.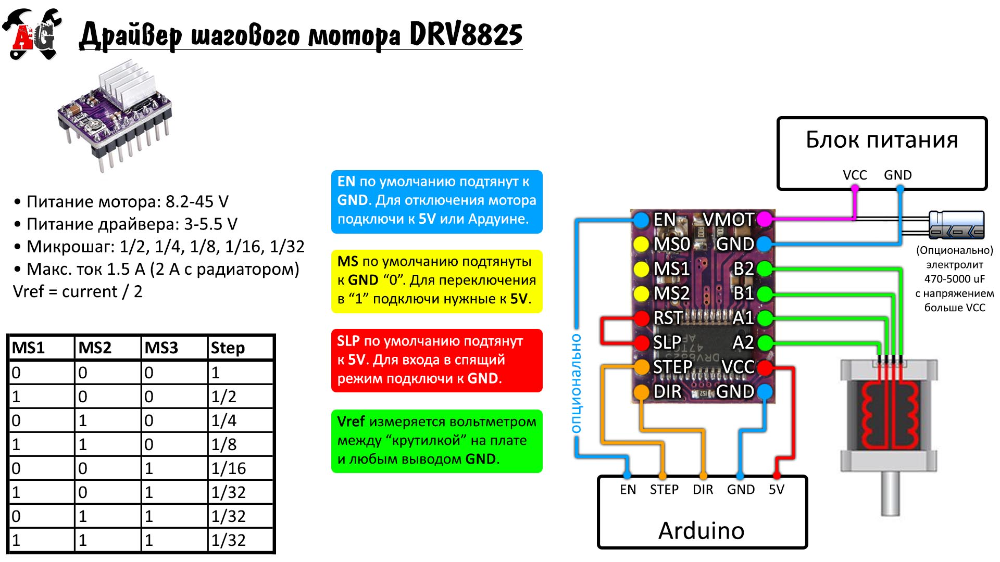
его на Arduino и как вы можете использовать его с Ozeki 10. Документ также включает
диаграммы и видео, которые помогут вам понять концепцию двигателей постоянного тока. Итак, приступим.
Что такое двигатель постоянного тока Arduino?
Двигатель постоянного тока (двигатель постоянного тока) является наиболее распространенным типом двигателя. двигатели постоянного тока
обычно имеют только два вывода, один положительный и один отрицательный. Если вы соедините эти
два провода напрямую к аккумулятору, двигатель будет вращаться. Если вы поменяете проводников,
двигатель будет вращаться в противоположном направлении.
Как использовать двигатель постоянного тока Arduino?
Для работы с двигателями постоянного тока необходимо подключить три контакта, как на схеме подключения.
показывает это (рис. 1). Один нужно соединить с землей (Gnd), другой с
двигатель к контакту 5V. Третий контакт должен быть подключен к контакту PWM на вашем
Ардуино. С подключенным двигателем постоянного тока теперь вы сможете им управлять. Вы можете настроить
Вы можете настроить
скорость вращения двигателя в диапазоне от 0 до 255.
Схема подключения двигателя постоянного тока Arduino
Рисунок 1 – Схема подключения двигателей постоянного тока Arduino
Как использовать двигатели постоянного тока Arduino в Ozeki
Контроллер двигателя постоянного тока подключает ваши двигатели постоянного тока к программному обеспечению Ozeki. Вы можете подключить до двух двигателей постоянного тока через любую микросхему драйвера двигателя L298N.
Этот чип интегрирован в плату контроллера двигателя постоянного тока LM298, а также в драйвер двигателя постоянного тока Ozeki.
Вы можете изменить направление движения и скорость обоих двигателей с помощью Ozeki.
Электродвигатели должны питаться от внешнего источника питания с максимальным напряжением 36 В.
Чтобы использовать двигатель постоянного тока в Ozeki, вам сначала нужно скачать Ozeki Robot Developer. озэки
Robot Developer установит библиотеки Arduino, необходимые для эффективного использования этого датчика.
Скачать Ozeki Robot Developer
После установки разработчика Ozeki Robot вам необходимо загрузить код управления двигателем постоянного тока.
к вашему Ардуино. Вы можете найти код и инструкции по загрузке на следующих страницах.
Процесс загрузки включает в себя два шага: сначала вам нужно отформатировать EEPROM Arduino,
затем вам нужно загрузить контрольный код. Процедура очень проста, требуется только
несколько секунд.
Загрузите код двигателя постоянного тока в Arduino Uno 9.0009 Загрузить код двигателя постоянного тока в Arduino Mega 2560
Загрузить код двигателя постоянного тока в Arduino Nano
Загрузить код двигателя постоянного тока в Ozeki Matrix
Загрузить код двигателя постоянного тока в Raspberry Pi
Двигатели Arduino и Ozeki будут обмениваться данными через порт USB с использованием протокола двигателя постоянного тока Ozeki. Этот
Протокол позволяет вам использовать двигатель непосредственно на вашем ПК.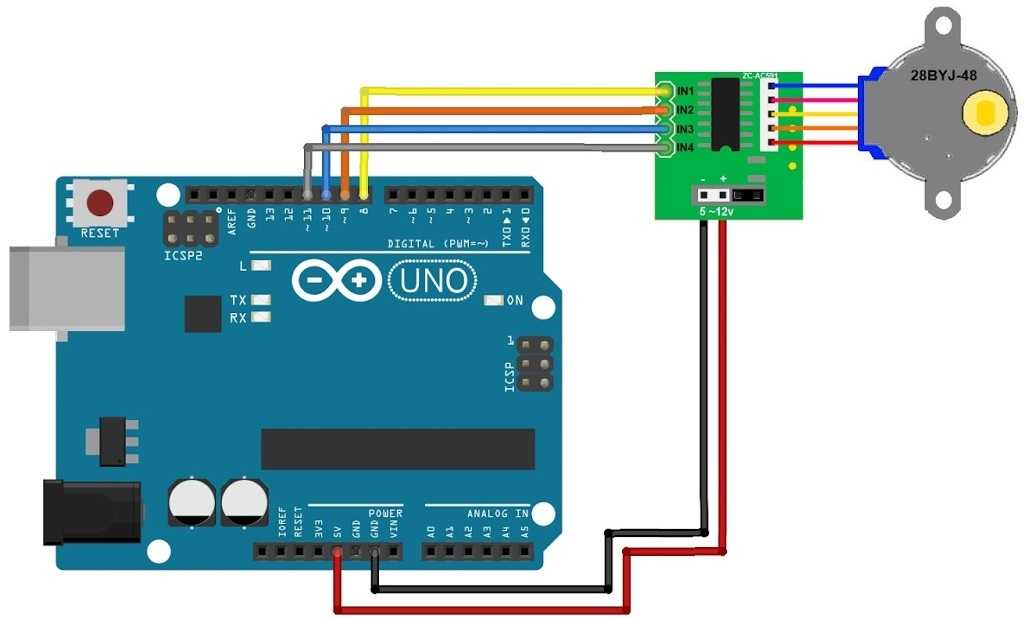 Вы сможете управлять этим двигателем через веб-интерфейс.
Вы сможете управлять этим двигателем через веб-интерфейс.
пользовательский интерфейс или вы сможете общаться с ним с помощью Ozeki Chat. Вы можете прочитать больше об управлении чатом на следующей странице.
Как общаться с двигателем постоянного тока с помощью чата
Важно понимать управление чатом, потому что когда вы строите робота,
способ, которым вы хотите управлять этим двигателем, — это отправка и получение сообщений. Если вы
откройте приложение Ozeki Robot Developer, вы увидите, кому вы можете написать C#.Net
программа для работы с этим мотором.
Этапы подключения
- Подключите двигатель постоянного тока к Arduino
- Подключите плату Arduino к компьютеру
- Проверьте COM-порты, чтобы убедиться, что ваш Arduino подключен
- Загрузите пример кода в Arduino
- Откройте https://localhost:9515 в браузере
- Выберите подключение вашего двигателя постоянного тока
- Настройка атрибутов двигателя постоянного тока
- Нажмите «Обновить», чтобы проверить двигатель постоянного тока
Обзор системы
Предлагаемая нами система состоит из двигателя постоянного тока, подключенного к аналоговому порту.
вашего Ардуино. Arduino будет отвечать за чтение данных с этого устройства.
в настоящее время. Мозг системы будет работать на ПК (рис. 2). На ПК Озеки
10 смогут управлять общением. Вы можете легко запустить Ozeki 10 с помощью веб-браузера.
Рис. 2. Конфигурация системы подключения двигателя постоянного тока к ПК с помощью Arduino
Предварительные условия
- 1 или 2 небольших двигателя постоянного тока
- Ozeki 10 установлен на вашем компьютере
- Программируемая плата (Arduino Mega/Nano/Uno, драйвер двигателя постоянного тока Ozeki или Raspberry Pi)
- Если вы не используете драйвер двигателя постоянного тока Ozeki, требуется плата контроллера двигателя постоянного тока LM298
- USB-кабель необходим между Arduino Mega/Nano/Uno, Ozeki DC Motor Driver и вашим компьютером
Шаг 1. Подключите двигатели постоянного тока к плате Arduino
Вы можете увидеть, как подключить двигатели постоянного тока.
на любую из следующих досок:
- Ардуино Мега 2560
- Ардуино Нано:
Ваш браузер не поддерживает видео тег.
- Ардуино Уно
- Драйвер двигателя постоянного тока Ozeki
- Малиновый Пи
(Если вы используете Raspberry Pi, перейдите к «Шаг 3»)
После подключения подключите плату к компьютеру!
Шаг 2. Загрузить код в микроконтроллер
(Вот код для загрузки)
Ваш браузер не поддерживает видео тег.
Шаг 3. Запустите Ozeki 10, чтобы попробовать двигатели постоянного тока
Ваш браузер не поддерживает видео тег.
Шаг 4. Настройка двигателей постоянного тока в Ozeki 10
Чтобы иметь возможность настроить ваши двигатели постоянного тока (подключенные к вашему Arduino) в Ozeki 10, который установлен
на вашем компьютере вам необходимо открыть графический интерфейс пользователя (GUI) Ozeki
10. Вы можете открыть графический интерфейс, введя URL-адрес компьютера в свой веб-браузер.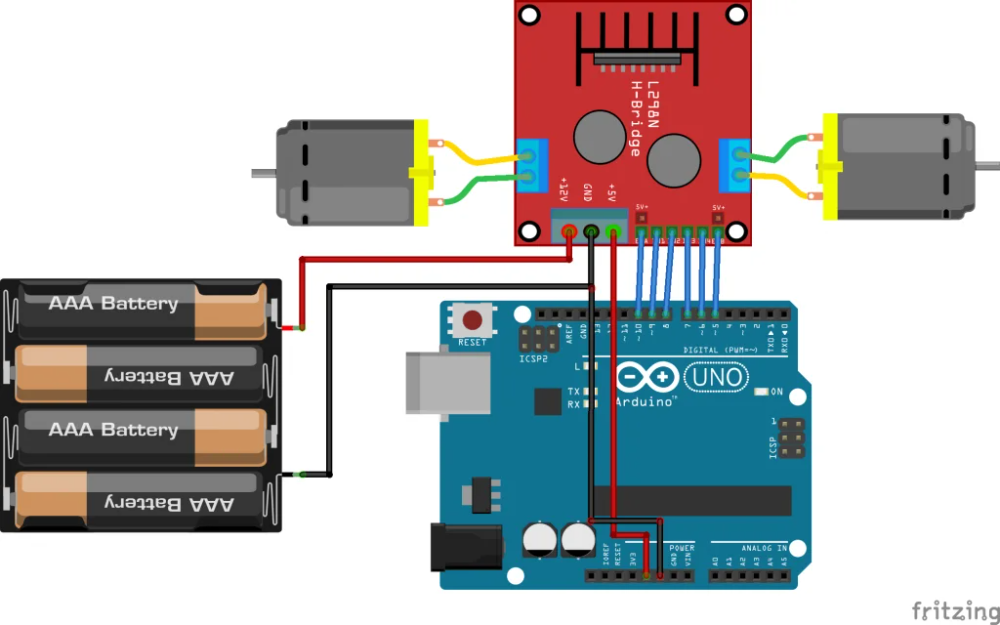
Например, если наш ПК имеет IP-адрес 192.168.1.5, мы бы
введите http://192.168.1.5:9513 в наш веб-браузер.
Шаг 5. Понимание протокола двигателей постоянного тока
Контроллер двигателя постоянного тока может связываться с Ozeki через
следующий протокол.
Каталожные номера:
https://www.dummies.com
https://www.tutorialspoint.com
Дополнительная информация
- Датчики и приводы Arduino
- Как использовать аналоговый датчик в Arduino
- Как использовать кнопочный контроллер в Arduino
- Как использовать зуммер в Arduino
- Как использовать датчик dht в arduino
- Как использовать диспетчер EEPROM в Arduino
- Как использовать датчик гироскопа в arduino
- Как использовать менеджер идентификаторов в Arduino
- Как использовать ИК-трансивер в Arduino
- Как использовать аналоговый джойстик в Arduino
- Как использовать клавиатуру в ардуино
- Как использовать ЖК-дисплей в Arduino
- Как использовать считыватель NFC в Arduino
- Как использовать оптический вентиль в Arduino
- Как использовать регистр в ардуино
- Как использовать приемопередатчик RF 433 МГц
- Как использовать приемопередатчик RF 2,4 ГГц
- Как использовать светодиод RGB в Arduino
- Как использовать датчик RGB в Arduino
- Как использовать поворотный энкодер в Arduino
- Как использовать серводвигатель в Arduino
- Как использовать шаговый двигатель в Arduino
- Как использовать переключатель в ардуино
- Как использовать датчик температуры в arduino
- Как использовать таймер в ардуино
- Как использовать ультразвуковой датчик в Arduino
| Зуммер | Arduino Mega |
Контроллер двигателя Raspberry Pi и конфигурации Arduino
Раскрытие информации: Некоторые из ссылок ниже являются партнерскими ссылками.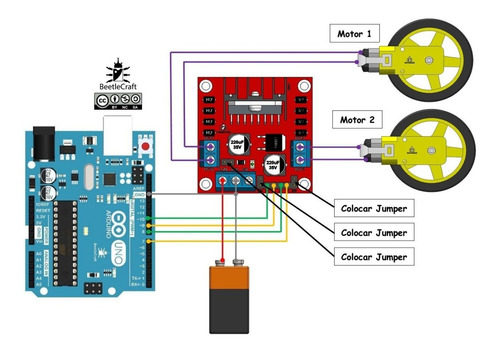 Это означает, что без каких-либо затрат для вас я буду получать партнерскую комиссию, если вы перейдете по ссылке и совершите покупку. Learn Robotics является участником партнерской программы Amazon Services LLC, партнерской рекламной программы, предназначенной для предоставления веб-сайтам возможности получать доход от рекламы за счет рекламы и ссылок на Amazon.com.
Это означает, что без каких-либо затрат для вас я буду получать партнерскую комиссию, если вы перейдете по ссылке и совершите покупку. Learn Robotics является участником партнерской программы Amazon Services LLC, партнерской рекламной программы, предназначенной для предоставления веб-сайтам возможности получать доход от рекламы за счет рекламы и ссылок на Amazon.com.
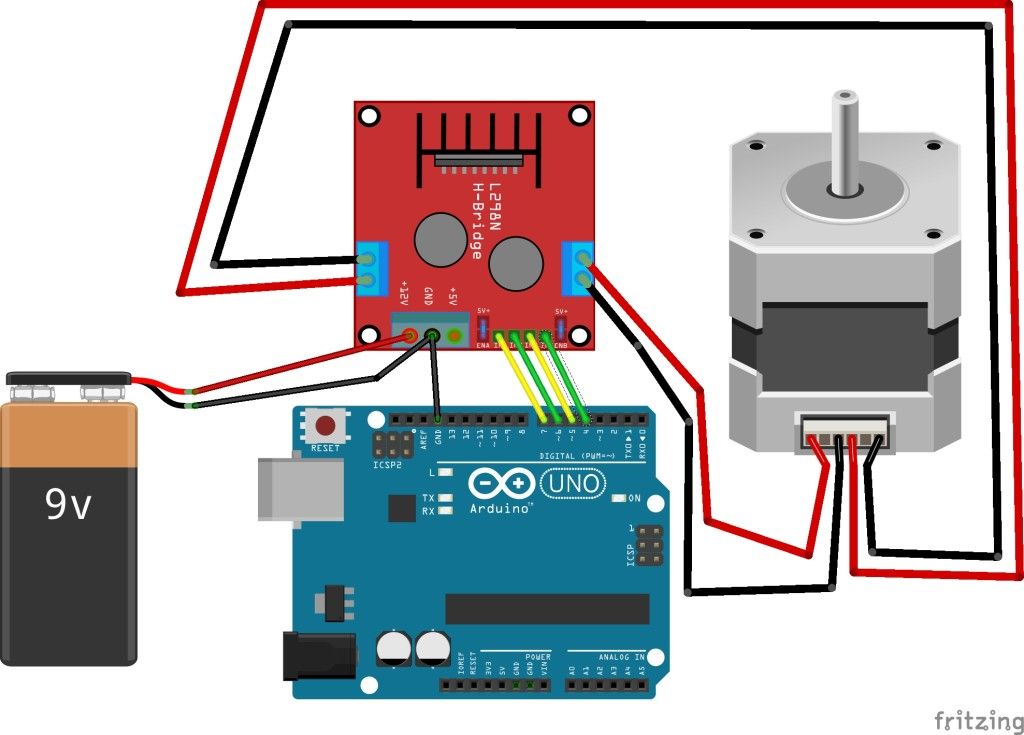
Если вы чем-то похожи на меня, значит, вам нравится собирать мобильных роботов. Я уверен, вы знаете, что мобильные роботы состоят из 5 частей: шасси, двигателей, контроллеров, датчиков и источника питания. Чтобы охватить три из этих групп, вам необходимо правильно подключить двигатели к контроллерам (двигатель и главный), а затем добавить источник питания.
Контроллер мотора легко подключить, но его питание для мобильных устройств может оказаться сложной задачей. В этих примерах показаны схемы подключения пары двигателей постоянного тока 3–6 В, питаемых от аккумуляторной батареи 7,4 В (2 батареи 18650). Выберите контроллеры из списка и используйте электрические схемы для завершения проекта. Для удобства вы также можете добавить эту страницу в закладки и посетить ее в следующий раз, когда будете создавать мобильного робота.
Выберите контроллеры из списка и используйте электрические схемы для завершения проекта. Для удобства вы также можете добавить эту страницу в закладки и посетить ее в следующий раз, когда будете создавать мобильного робота.
В этой статье я собрал наиболее популярные или распространенные конфигурации для подключения контроллеров двигателей L298N (техническое описание) и L293D (техническое описание) к Raspberry Pi и Arduino (Uno, Nano, NodeMCU). Я составил это руководство, чтобы хранить все ресурсы и электрические схемы в одном месте.
Для удобства навигации вы можете щелкнуть ссылки ниже, чтобы найти электрическую схему на этой странице.
Схемы контроллера двигателя Raspberry Pi
Напоминаем, что Raspberry Pi использует оба Broadcom и физические номера контактов для контактов GPIO. Контакты Broadcom — это ссылка GPIOXX, а физические контакты — это номера, соответствующие физическому расположению каждого контакта в заголовке. Мы будем ссылаться на контакты Broadcom GPIOXX на схемах подключения ниже.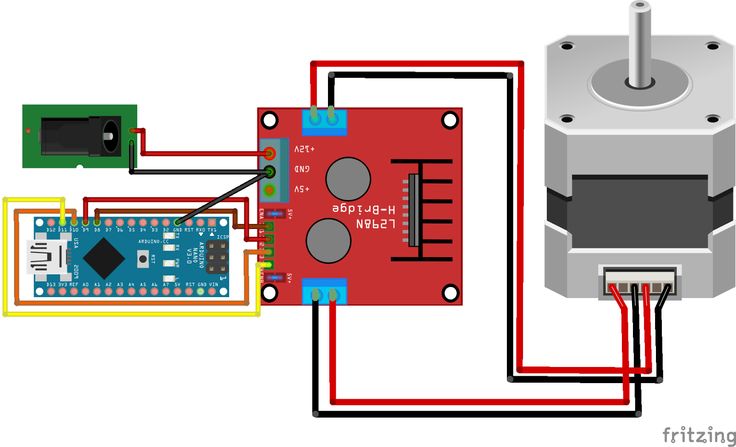 Итак, с учетом сказанного, вот коллекция популярных схем подключения контроллера двигателя Raspberry Pi.
Итак, с учетом сказанного, вот коллекция популярных схем подключения контроллера двигателя Raspberry Pi.
Нажмите для распиновки Raspberry Pi Zero W
L298N Схема подключения Raspberry Pi
Для этого приложения вы подключите L298N сигнальные булавки следующим образом:
L298N ENA TO GPIO18
L298N IN1 TO GPIO4
L298N IN2 — GPIO17
L298N IN3 TO GPIO27
L298N IN4 TO GPIO22
L298NN ENB TO GPIO TO GPIO. Аккумуляторная батарея.
Схема подключения L293D Raspberry Pi
L293D подключается аналогично. Вам понадобится макетная плата для подключения L293D. Вот сигнальные контакты между контроллерами.
L293D Включить 1 для GPIO18
L293D IN1 — GPIO4
L293D IN2 — GPIO17
L293D IN3 — GPIO27
L293D IN4 — GPIO22
L293D Enable 2 — GPIO12
Вы можете питать Raspberry Pi от аккумуляторной батареи 5 В 2 А.
Adafruit TB6612 с Raspberry Pi
Наконец, вы можете использовать TB6612 с Raspberry Pi, если хотите использовать внешний источник питания двигателя постоянного тока. Вот как это подключено:
Вот как это подключено:
TB6612 AIN1 к GPIO18
TB6612 PWMA к GPIO4
TB6612 AIN2 к GPIO17
TB6612 STBY к GPIO27
TB6612 PWMB к GPIO22
TB6612 BIN2 к GPIO23
Если вы не используете Raspberry Pi, вы можете проверить схемы контроллера двигателя Arduino для своего проекта. Я собрал чертежи для Arduino Uno, Nano и NodeMCU.
Схемы подключения контроллера двигателя Arduino
Если вы предпочитаете использовать Arduino, вы можете ознакомиться с этим набором общих схем подключения контроллера двигателя Arduino. Чтобы узнать, как построить мобильного робота с помощью Arduino, ознакомьтесь с этим популярным руководством. Вы также можете принять участие в нашем электронном курсе по робототехнике, чтобы узнать больше о мобильных роботах, программировании, электронике и поучаствовать в автономных задачах. Запишитесь на курс здесь.
Схема подключения Arduino Uno L298N
L298N — довольно распространенный контроллер, используемый с Arduino Uno.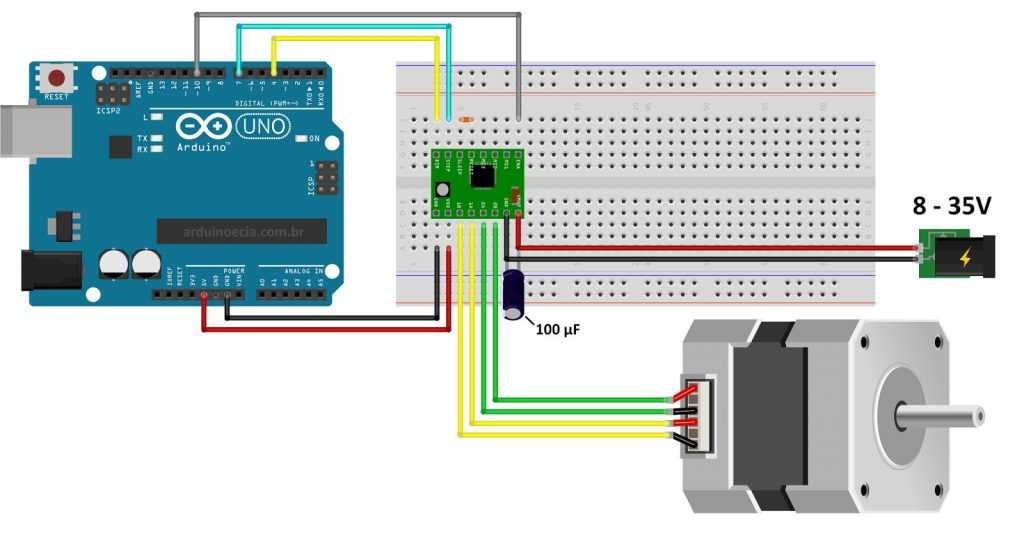 Подключите сигнальные контакты следующим образом:
Подключите сигнальные контакты следующим образом:
L298N ENA к цифровому 5
L298N IN1 к цифровому 2
L298N IN2 к цифровому 3
L298N IN3 к цифровому 4
L298N IN4 к цифровому 7
L298N ENB к цифровому 6
5 900 питайте L298N от аккумуляторной батареи 7,4 В. Обязательно разделите землю между Arduino, L298N и аккумулятором. Контакт 12V на L298N подключается к шине Vcc на макетной плате. Наконец, подключите 5 В от Arduino к шине Vcc на макетной плате и к контакту 5 В на L298N. Вам не нужно запитывать Arduino с помощью USB-кабеля после того, как ваш блок питания подключен.
Готовы сделать своего робота автономнее? Из этого руководства вы узнаете, как запрограммировать контроллер мотора L298N с помощью Arduino.
Схема подключения Arduino Uno L293D
Вот схема подключения L293D для Arduino Uno. Сигнальные контакты подключаются следующим образом:
L293D Enable 1 to Digital 5
L293D IN1 to Digital 2
L293D IN2 to Digital 3
L293D IN3 to Digital 4
L293D IN4 to Digital 7
L293D Enable 2 to Digital 6
9000 , за которым следует питание между Arduino, контроллером мотора и аккумулятором.
Схема подключения Arduino Nano L298N
Создайте робота Arduino меньшего размера, используя Arduino Nano и контроллер двигателя L298N. Подключите сигнальные контакты следующим образом:
L298N ENA — цифровой 3
L298N IN1 — цифровой 2
L298N IN2 — цифровой 4
L298N IN3 — цифровой 6
L298N IN4 — цифровой 7
L298N ENB — цифровой 5
L298N. Затем подключите провода питания и заземления к макетной плате. Обязательно подключите питание и заземление к нано, контроллеру мотора и аккумулятору.
Схема подключения Arduino Nano L293D
Вот как подключить Arduino Nano к L293D контроллер двигателя. Подключите сигнальные контакты следующим образом. Затем соедините кабели питания, заземления и двигателя, используя схему ниже.
L293D Enable 1 to 3
L293D IN1 to 2
L293D IN2 to 4
L293D IN3 to 6
L293D IN4 to 7
L293D Enable 2 to 5
NodeMCU L298N Wiring Diagram
The NodeMCU requires an additional Voltage Regulator (L7805 — 5 В 1,5 А), электролитический конденсатор (1 мкФ/50 В) и керамический конденсатор (100 нФ — 0603).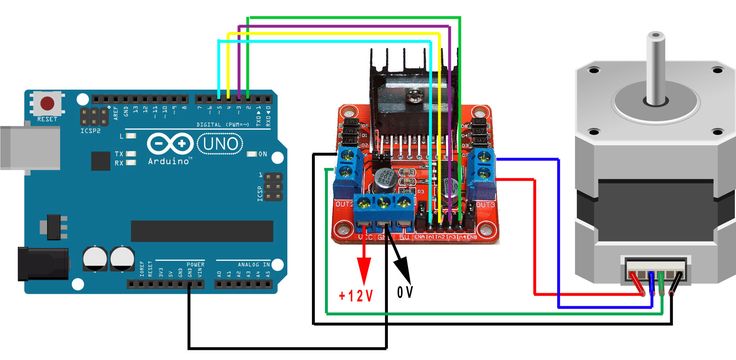 Сигнальные контакты между NodeMCU и L298N приведены следующим образом:
Сигнальные контакты между NodeMCU и L298N приведены следующим образом:
L298N ENA до D2
L298N IN1 до D1
L298N IN2 до D3
L298N IN3 до D4
L298N IN4 до D6
L298N ENB TO D5
7.MANCU ALS LIRNING 5.92.92.92.92.92.92.202.292 -nlive используйте L293D с вашим NodeMCU. Вот как подключить сигнальные контакты:
L293D Enable 1 к D2
L293D IN1 к D1
L293D IN2 к D3
L293D IN3 к D4
L293D IN4 к D6
L293D Enable 2 к D5
2 хотите проверить свою проводку и не отключать питание контроллера во время загрузки кода. Хорошей практикой является добавление выключателя питания для отключения аккумуляторной батареи, чтобы упростить проводку. Самое классное в этих конфигурациях то, что как только вы попробуете несколько из них, вы сможете сделать мобильного робота практически из чего угодно! Некоторые проекты включают Tiny Robot Cars, Robotic Tanks, Robot Cars и многое другое.
Вы создали какую-либо из этих конфигураций?
Надеюсь, эта статья окажется полезной для вашего следующего проекта мобильного робота! Отмечайте нас в своих проектах по робототехнике на Facebook и Instagram!
Тогда дайте мне знать, что вы думаете об этом посте в разделе комментариев ниже.