Содержание
§76. Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором (рис. 249 и 250) состоит из следующих основных частей: статор с трехфазной обмоткой, ротор с короткозамкнутой обмоткой и остов. Обмотка ротора выполнена бесконтактной (она не соединена ни с какой внешней цепью), что определяет высокую надежность такого двигателя.
Магнитная система. Асинхронная машина в отличие от машины постоянного тока не имеет явно выраженных полюсов. Такую магнитную систему называют неявнополюсной. Число полюсов в машине определяется числом катушек в обмотке статора и схемой их соединения. В четырехполюсной машине (рис. 251) магнитная система состоит из четырех одинаковых ветвей, по каждой из которых проходит половина магнитного потока Фп одного полюса, в двухполюсной машине таких ветвей две, в шестиполюсной — шесть и т. д. Так как через все элементы магнитной системы проходит переменный магнитный поток, то не только ротор 1, но
Рис. 249. Асинхронный двигатель с короткозамкнутым ротором: 1 — остов; 2 — статор; 3 — ротор; 4 — стержни обмотки ротора; 5 — подшипниковый щит; 6 — вентиляционные лопатки ротора; 7 — вентилятор; 8 — коробка выводов
249. Асинхронный двигатель с короткозамкнутым ротором: 1 — остов; 2 — статор; 3 — ротор; 4 — стержни обмотки ротора; 5 — подшипниковый щит; 6 — вентиляционные лопатки ротора; 7 — вентилятор; 8 — коробка выводов
Рис. 250. Электрическая схема асинхронного двигателя с короткозамкнутым ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор
Рис.251. Магнитное поле четырехполюсной асинхронной машины
Рис. 252. Листы ротора (а) и статора (б)
Рис. 253. Пакет собранного статора (а) и статор с обмоткой (б)
и статор 2 выполняют из листов электротехнической стали (рис. 252), изолированных один от другого изоляционной лаковой пленкой, окалиной и пр. В результате этого уменьшается вредное действие вихревых токов, возникающих в стали статора и ротора при вращении магнитного поля. Листы статора и ротора имеют пазы открытой, полузакрытой или закрытой формы, в которых располагаются проводники соответствующих обмоток. В статоре чаще всего применяют полузакрытые пазы прямоугольной или овальной формы, в машинах большой мощности — открытые пазы прямоугольной формы.
В статоре чаще всего применяют полузакрытые пазы прямоугольной или овальной формы, в машинах большой мощности — открытые пазы прямоугольной формы.
Сердечник статора 1 (рис. 253, а) запрессовывают в литой остов 3 и укрепляют стопорными винтами. Сердечник ротора напрессовывают на вал ротора, который вращается в шариковых подшипниках, установленных в двух подшипниковых щитах. Воздушный зазор между статором и ротором имеет минимальный размер, допускаемый с точки зрения точности сборки и механической жесткости конструкции. В двигателях малой и средней мощности воздушный зазор обычно составляет несколько десятых миллиметра. Такой зазор обеспечивает уменьшение магнитного сопротивления магнитной цепи машины, а следовательно, и уменьшение намагничивающего тока, требуемого для создания в двигателе магнитного потока. Снижение намагничивающего тока позволяет повысить коэффициент мощности двигателя.
Обмотка статора. Она выполнена в виде ряда катушек из проволоки круглого или прямоугольного сечения. Проводники, находящиеся в пазах, соединяются, образуя ряд катушек 2 (рис. 253,б). Катушки разбивают на одинаковые группы по числу фаз, которые располагают симметрично вдоль окружности статора (рис. 254, а) или ротора. В каждой такой группе все катушки электрически соединяются, образуя одну фазу обмотки, т. е. отдельную электрическую цепь. При больших значениях фазного тока или при необходимости переключения отдельных катушек фазы могут иметь несколько параллельных ветвей. Простейшим элементом обмотки является виток (рис. 254,б), состоящий из двух проводников 1 и 2, размещенных в пазах, находящихся друг от друга на неко-
Проводники, находящиеся в пазах, соединяются, образуя ряд катушек 2 (рис. 253,б). Катушки разбивают на одинаковые группы по числу фаз, которые располагают симметрично вдоль окружности статора (рис. 254, а) или ротора. В каждой такой группе все катушки электрически соединяются, образуя одну фазу обмотки, т. е. отдельную электрическую цепь. При больших значениях фазного тока или при необходимости переключения отдельных катушек фазы могут иметь несколько параллельных ветвей. Простейшим элементом обмотки является виток (рис. 254,б), состоящий из двух проводников 1 и 2, размещенных в пазах, находящихся друг от друга на неко-
Рис. 254. Расположение катушек трехфазной обмотки на статоре асинхронного двигателя (а) и виток из двух проводников (б)
тором расстоянии у. Это расстояние приблизительно равно одному полюсному делению т, под которым понимают длину дуги, соответствующую одному полюсу.
Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки.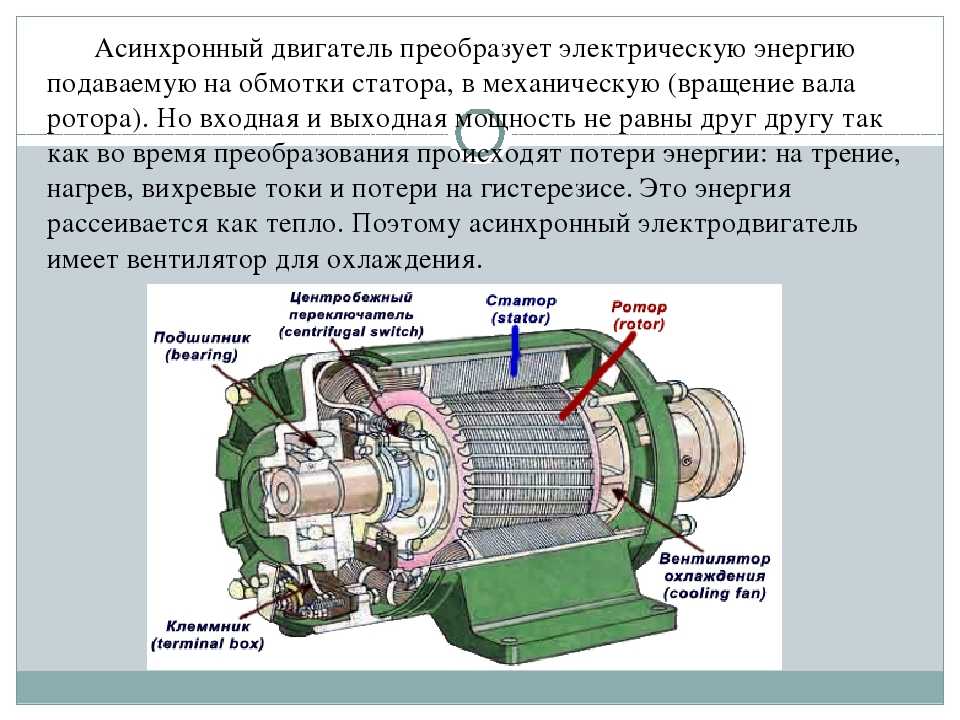 Иногда их называют секциями. Их укладывают таким образом, что в каждом пазу размещается одна сторона катушки или две стороны — одна над другой. В соответствии с этим различают одно- и двухслойные обмотки. Основным параметром, определяющим распределение обмотки по пазам, является число пазов q на полюс и фазу.
Иногда их называют секциями. Их укладывают таким образом, что в каждом пазу размещается одна сторона катушки или две стороны — одна над другой. В соответствии с этим различают одно- и двухслойные обмотки. Основным параметром, определяющим распределение обмотки по пазам, является число пазов q на полюс и фазу.
В обмотке статора двухполюсного двигателя (см. рис. 254, а) каждая фаза (А-Х; B-Y; C-Z) состоит из трех катушек, стороны которых расположены в трех смежных пазах, т. е. q = 3. Обычно q > 1, такая обмотка называется распределенной.
Наибольшее распространение получили двухслойные распределенные обмотки. Их секции 1 (рис. 255, а) укладывают в пазы 2 статора в два слоя. Проводники обмотки статора укрепляют в пазах текстолитовыми клиньями 5 (рис. 255,б), которые закладывают у головок зубцов.
Стенки паза покрывают листовым изоляционным материалом 4 (электрокартоном, лакотканью и пр.). Проводники, лежащие в пазах, соединяют друг с другом соответствующим образом с торцовых сторон машины. Соединяющие их провода называют лобовыми частями. Так как лобовые части не принимают участия в индуцировании э. д. с, их выполняют как можно короче.
Соединяющие их провода называют лобовыми частями. Так как лобовые части не принимают участия в индуцировании э. д. с, их выполняют как можно короче.
Отдельные катушки обмотки статора могут соединяться «звездой» или «треугольником». Начала и концы обмоток каждой фазы выводят к шести зажимам двигателя.
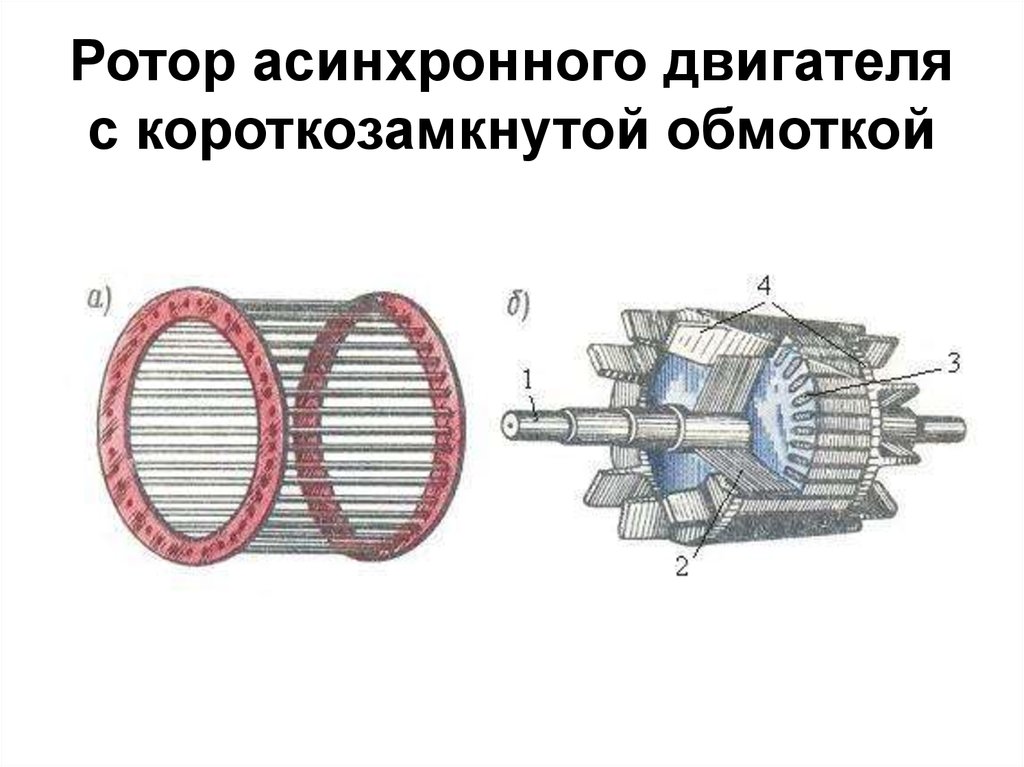
Обмотка ротора. Обмотка ротора выполнена в виде беличьей клетки (рис. 256,а). Она сделана из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (рис. 256,б). Стержни этой обмотки вставляют в пазы ротора без какой-либо изоляции, так как напряжение в короткозамкну-
Рис. 255. Двухслойная обмотка статора асинхронного двигателя: 1 — секция; 2 — паз; 3 — проводник; 4 — изоляционный материал; 5 — клин; 6 — зубец
Рис. 256. Короткозамкнутый ротор: а — беличья клетка; б — ротор с беличьей клеткой из стержней; в — ротор с литой беличьей клеткой; 1 — короткозамыкающие кольца; 2— стержни; 3— вал; 4 — сердечник ротора; 5 — вентиляционные лопасти; 6 — стержни литой клетки
той обмотке ротора равно нулю. Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а в машинах малой мощности — закрытыми (паз имеет стальной ободок, отделяющий его от воздушного зазора). Такая форма паза позволяет хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивает ее индуктивное сопротивление.
Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а в машинах малой мощности — закрытыми (паз имеет стальной ободок, отделяющий его от воздушного зазора). Такая форма паза позволяет хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивает ее индуктивное сопротивление.
В двигателях мощностью до 100 кВт стержни беличьей клетки обычно получают путем заливки расплавленного алюминия в пазы сердечника ротора (рис. 256, в). Вместе со стержнями беличьей клетки отливают и соединяющие их торцовые короткозамыкающие кольца.
Для этой цели пригоден алюминий, так как он обладает малой плотностью, достаточно высокой электропроводностью и легко плавится.
Обычно двигатели имеют вентиляторы, насаженные на вал ротора. Они осуществляют принудительную вентиляцию нагретых частей машины (обмоток и стали статора и ротора), позволяя получить от двигателя большую мощность. В двигателях с короткозамкнутым ротором лопасти вентилятора часто отливают совместно с боковыми кольцами беличьей клетки (см. рис. 256, в).
рис. 256, в).
Асинхронные двигатели с короткозамкнутым ротором просты по конструкции, надежны в эксплуатации. Их широко применяют для привода металлообрабатывающих станков и других устройств, которые начинают работать без нагрузки. Однако сравнительно малый пусковой момент у этих двигателей и большой пусковой ток не позволяют использовать их для привода таких машин и механизмов, которые должны пускаться в ход сразу под большой нагрузкой (с большим пусковым моментом). К таким машинам относятся грузоподъемные устройства, компрессоры и др.
Увеличить пусковой момент и уменьшить пусковой ток можно при выполнении беличьей клетки с повышенным активным сопротивлением. При этом двигатель будет иметь увеличенное скольжение и большие потери мощности в обмотке ротора. Такие двигатели называют двигателями с повышенным скольжением (обозначаются АС). Их можно использовать для привода машин, работающих сравнительно небольшое время. На э. п. с. переменного тока эти двигатели (со скольжением до 10%) применяют для привода компрессоров, которые работают периодически в течение коротких промежутков времени при уменьшении давления в воздушных резервуарах ниже определенного предела.
Двигатели с повышенным пусковым моментом. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом имеют специальную конструкцию ротора (обозначаются АП). К ним относятся двигатели с двойной беличьей клеткой и двигатели с глубокими пазами.
Ротор 3 (рис. 257,а) двигателя с двойной беличьей клеткой имеет две короткозамкнутые обмотки. Наружная клетка 1 является пусковой. Она обладает большим активным и малым реактивным сопротивлениями. Внутренняя клетка 2 является основной обмоткой ротора; она, наоборот, обладает незначительным активным и большим реактивным сопротивлениями. В начальный момент пуска ток проходит, главным образом, по наружной клетке, которая создает значительный вращающий момент. По мере увеличения частоты вращения ток переходит во внутреннюю клетку, и по окончании процесса пуска машина работает как обычный короткозамкнутый двигатель с одной (внутренней) клеткой. Вытеснение тока в наружную клетку в начальный момент пуска объясняется действием, э. д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
Вытеснение тока в верхние проводники ротора сильно сказывается при неподвижном роторе, когда частота тока, индуцируемого в обеих клетках ротора, велика. При этом индуктивные
Рис. 257. Конструкция роторов асинхронных двигателей с повышенным пусковым моментом: с двойной беличьей клеткой (а), с глубокими пазами (б) и разрезы их пазов (в и г)
сопротивления обеих клеток значительно больше активных и ток распределяется между ними обратно пропорционально их индуктивным сопротивлениям, т. е. проходит в основном по наружной клетке с большим активным сопротивлением. По мере возрастания частоты вращения ротора частота тока в нем будет уменьшаться (вращающееся магнитное поле будут пересекать проводники ротора с меньшей частотой), и ток начнет проходить по обеим клеткам в соответствии с их активными сопротивлениями, т. е., главным образом, через внутреннюю клетку.
е., главным образом, через внутреннюю клетку.
Таким образом, процесс пуска двигателя с двойной беличьей клеткой имеет сходство с процессом пуска асинхронного двигателя с фазным ротором, когда в начале пуска в цепь обмотки ротора вводится добавочное активное сопротивление (пусковой реостат), а по мере разгона это сопротивление выводится. Точно так же и в рассматриваемом двигателе ток в начале пуска проходит по наружной клетке с большим активным сопротивлением, а затем по мере разгона постепенно переходит во внутреннюю клетку с малым активным сопротивлением.
Для повышения активного сопротивления пусковой клетки стержни ее изготовляют из маргацовистой латуни или бронзы. Стержни рабочей клетки выполняют из меди, обладающей малым удельным сопротивлением, причем площадь поперечного сечения их больше, чем у пусковой клетки. В результате этого активное сопротивление пусковой клетки увеличивается в 4—5 раз по сравнению с рабочей. Между стержнями обеих клеток имеется узкая щель 5, размеры которой определяют индуктивность рабочей клетки. Двухклеточный двигатель на 20—30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Двухклеточный двигатель на 20—30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Действие двигателей с глубокими пазами (рис. 257, б) также основано на использовании явления вытеснения тока. В этих двигателях стержни 4 беличьей клетки выполнены в виде узких медных шин, заложенных в глубокие пазы ротора 3 (высота паза в 10— 12 раз больше его ширины). Нижние слои стержней, расположенные дальше от поверхности ротора, охватываются значительно большим числом магнитных линий потока рассеяния 6, чем верхние (рис. 257,г), поэтому они имеют во много раз большую индуктивность. В начале пуска в результате увеличенного индуктивного сопротивления нижних частей стержней ток проходит, главным образом, по их верхним частям. При этом используется только небольшая часть поперечного сечения каждого стержня, что приводит к увеличению его активного сопротивления, а следовательно, и к возрастанию активного сопротивления всей обмотки ротора.
При увеличении частоты вращения ротора вытеснение тока в верхние части стержней уменьшается (по той же причине, что и в двигателе с двойной беличьей клеткой), и после окончания пуска ток равномерно распределяется по площади их поперечного сечения.
Новости: трехфазные асинхронные двигатели
Устройство трехфазных асинхронных двигателей (статор и ротор асинхронных двигателей)
Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Асинхронные двигатели в основном различаются устройством ротора, который бывает двух типов: фазный или короткозамкнутый. Обмотка короткозамкнутого ротора асинхронного двигателя выполняется на цилиндре из медных стержней и называется «беличьей клеткой». Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Получение вращающегося магнитного поля
Обмотка статора асинхронного двигателя в виде трех катушек уложена в пазы расположенные под углом в 120 градусов. Начало и конца катушек обозначаются соответственно буквами A, B, C и X,Y,Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле. Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки.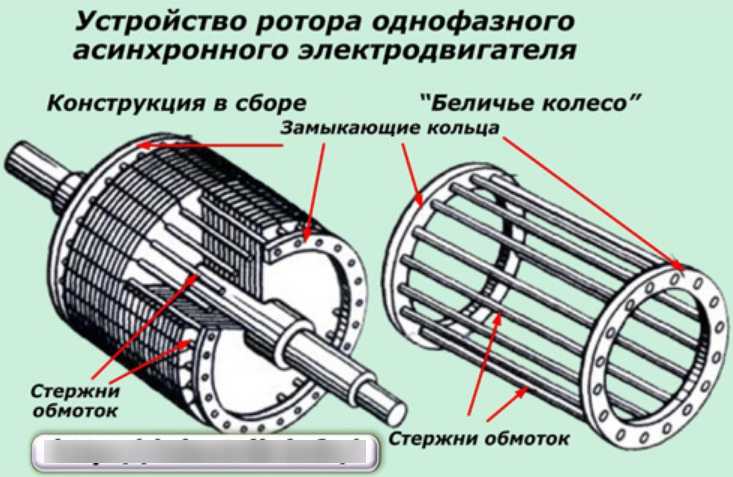 Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки. Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами наводимыми в проводниках ротора.
Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки. Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами наводимыми в проводниках ротора.
Принцип работы трехфазного асинхронного двигателя
Совокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора. Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Пуск асинхронных двигателей
В асинхронных двигателях с большим моментом инерции необходимо увеличение вращающего момента с одновременным ограничением пусковых токов — для этих целей применяют двигатели с фазным ротором.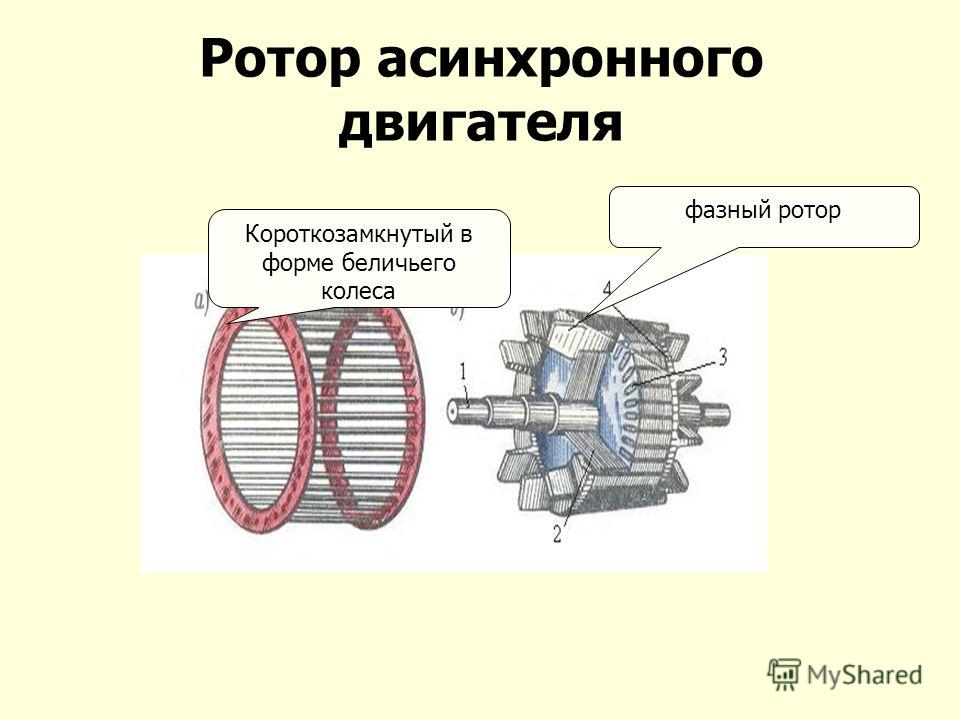 Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Изменение частоты вращения ротора трехфазного асинхронного двигателя
Параллельные обмотки двух фаз образуют одну пару полюсов сдвинутые в пространстве на 120 градусов. Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
Способы торможения двигателей
При торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины. При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
Источник: http://ruaut.ru/
Возврат к списку
Тех. информация
КАК ПРАВИЛЬНО ВЫБРАТЬ ТАЛЬ
В качестве электропривода механизма подъема и механизма перемещения талей МЕХАНИКА используются асинхронные электродвигатели с короткозамкнутым ротором общего назначения выполненные по ГОСТ Р 52776-2007 (МЭК 60034-1-2004).
Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Для правильного выбора самого двигателя, как элемента механизма подъема или перемещения, необходимо понимать конструкцию и принцип его действия.
Асинхронный двигатель- это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный”означаетнеодновременный. Приэтомимеетсяввиду, чтоуасинхронныхдвигателейчастотавращениямагнитногополястаторавсегдабольшечастотывращения ротора. Работают асинхронные двигатели, как понятно из определения, от сетипеременного тока.
Само слово “асинхронный”означаетнеодновременный. Приэтомимеетсяввиду, чтоуасинхронныхдвигателейчастотавращениямагнитногополястаторавсегдабольшечастотывращения ротора. Работают асинхронные двигатели, как понятно из определения, от сетипеременного тока.
Статоримеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой». В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
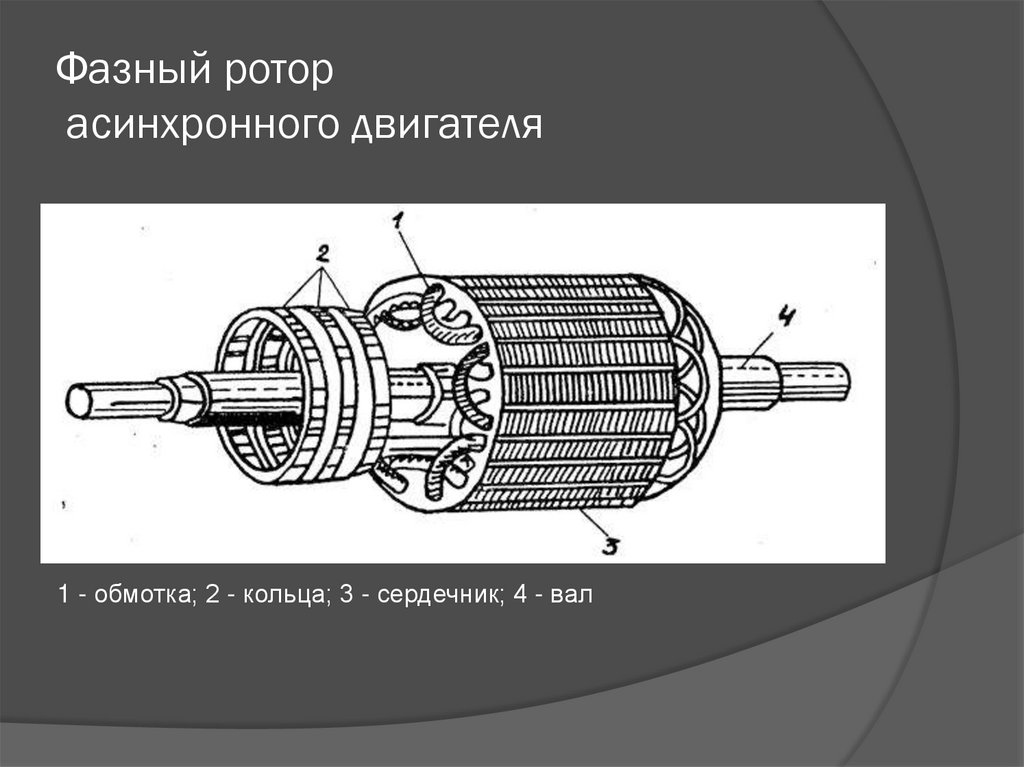
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов.
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь, взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь, взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величиныsкр -критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Скорость двигателя переменного тока зависит от двух вещей: количества полю-сов обмотки статора и основной часто-ты. При частоте 50 Гц двигатель будет ра-ботать со скоростью, равной постоянной 6000, разделенной на число полюсов, при частоте 60 Гц постоянная величина будет равна 7200.
Выходит, что принцип работы асинхронного двигателя заключаетсяво взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
На графике показаны типовые моментные характеристики асинхронного электродвигателя с короткозамкнутым ротором. Как видно из графика, номинальный крутящий момент достигатеся в конце кривой и находится на «падающей» ее части. На данном участке работы, скольжение двигателя стремится к 0. При этом необходимо обратить внимание на показатели силы тока I. Основной особенностью двигателей с короткозамкнутым ротором являются высокие пусковые токи. Собственно говоря эта особенность и определяет основные трудности в выборе (или конструировании) электродвигателя. По мере достижения ротором синхронной скорости уменьшается крутящий момент на валу двигателя, тогда как его запаздывание относительно вращения магнитного поля статора вызывает рост тока в роторе, что в свою очередь создает тепловую нагрузку от его активного сопротивления.
Собственно говоря эта особенность и определяет основные трудности в выборе (или конструировании) электродвигателя. По мере достижения ротором синхронной скорости уменьшается крутящий момент на валу двигателя, тогда как его запаздывание относительно вращения магнитного поля статора вызывает рост тока в роторе, что в свою очередь создает тепловую нагрузку от его активного сопротивления.
Таким образовм, производителю электродвигателя необходимо определить «баланс», при котором конструкция будет обеспечивать стабильный тепловой режим
Назад
Вперёд
Ответы на семь общих вопросов о работе генераторов и двигателей
Вращающееся оборудование настолько распространено, но так неправильно понимается, что даже очень опытные электрики и инженеры часто задаются вопросами об их работе. В этой статье мы ответим на семь наиболее часто задаваемых вопросов. Объяснения краткие и практичные из-за ограниченного места; тем не менее, они позволят вам лучше понять это оборудование.
Вопрос №1: Якорь, поле, ротор, статор: что есть что?
Статор по определению состоит из всех невращающихся электрических частей генератора или двигателя. Также по определению ротор включает в себя все вращающиеся электрические части.
Поле машины — это часть, которая создает прямое магнитное поле. Ток в поле не переменный. Обмотка якоря — это та, которая генерирует или имеет приложенное к ней переменное напряжение.
Обычно термины «якорь» и «поле» применяются только к генераторам переменного тока, синхронным двигателям, двигателям постоянного тока и генераторам постоянного тока.
Генераторы переменного тока . Поле синхронного генератора представляет собой обмотку, на которую подается постоянный ток возбуждения. Якорь – это обмотка, к которой подключена нагрузка. В малых генераторах обмотки возбуждения часто находятся на статоре, а обмотки якоря — на роторе. Однако большинство больших машин имеют вращающееся поле и неподвижный якорь.
Синхронный двигатель практически идентичен синхронному генератору. Таким образом, якорь — это статор, а поле — это ротор.
Таким образом, якорь — это статор, а поле — это ротор.
Машины постоянного тока . В машинах постоянного тока, как двигателях, так и генераторах, ротором является якорь, а статором — поле. Поскольку якорь всегда является ротором в машинах постоянного тока, многие электрики и инженеры ошибочно полагают, что ротором всех двигателей и генераторов является якорь.
Вопрос № 2: Я ослабил натяжение пружины на щетках, но они по-прежнему изнашиваются слишком быстро. Почему?
Износ щеток происходит по двум основным причинам: механическое трение и электрический износ. Механическое трение вызывается трением щеток о коллектор или контактное кольцо. Электрический износ вызван искрением и искрением щетки, когда она движется по коллектору. Механическое трение увеличивается с давлением щетки; Электрический износ уменьшается с давлением щетки.
Для любой установки щетки существует оптимальное давление щетки. Если давление снижается ниже этой величины, общий износ увеличивается, поскольку увеличивается электрический износ.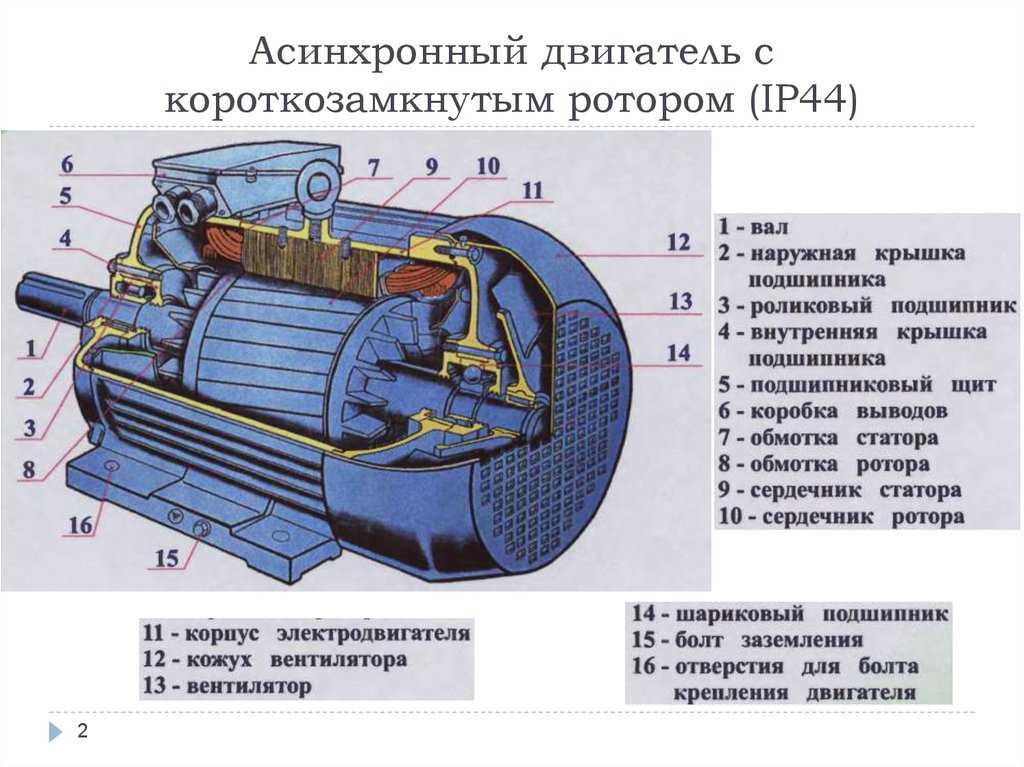 Если давление увеличивается выше оптимального значения, общий износ снова увеличивается из-за увеличения механического трения.
Если давление увеличивается выше оптимального значения, общий износ снова увеличивается из-за увеличения механического трения.
Всегда следите за тем, чтобы давление щетки было установлено на уровне, рекомендованном производителем. Если износ по-прежнему чрезмерный, следует изучить тип и размер используемой щетки. Помните, что плотность тока (ампер на квадратный дюйм щетки) должна соответствовать применению. Надлежащая плотность тока необходима для того, чтобы на коллекторе или контактном кольце образовалась смазочная проводящая пленка. Эта пленка состоит из влаги, меди и углерода. Недостаточная плотность тока препятствует образованию этой пленки и может привести к чрезмерному износу щеток.
Кроме того, среда с очень низкой влажностью не обеспечивает достаточного количества влаги для образования смазочной пленки. Если в такой среде возникает проблема чрезмерного износа щеток, возможно, вам придется увлажнить место, где работает машина.
Вопрос № 3: Что такое сервис-фактор?
Коэффициент эксплуатации — это нагрузка, которая может быть приложена к двигателю без превышения допустимых значений. Например, если двигатель мощностью 10 л.с. имеет эксплуатационный фактор 1,25, он будет успешно развивать мощность 12,5 л.с. (10 x 1,25) без превышения заданного повышения температуры. Обратите внимание, что при таком приводе выше номинальной нагрузки двигатель должен питаться с номинальным напряжением и частотой.
Однако имейте в виду, что двигатель мощностью 10 л.с. с коэффициентом эксплуатации 1,25 не является двигателем мощностью 12,5 л.с. Если двигатель мощностью 10 л.с. будет постоянно работать при мощности 12,5 л.с., срок службы его изоляции может сократиться на две трети от нормального. Если вам нужен двигатель мощностью 12,5 л.с., купите его; эксплуатационный коэффициент следует использовать только для кратковременных условий перегрузки.
Вопрос № 4: Что такое вращающееся магнитное поле и почему оно вращается?
Вращающееся магнитное поле — это поле, северный и южный полюса которого движутся внутри статора, как если бы внутри машины вращался стержневой магнит или магниты.
Посмотрите на статор трехфазного двигателя, показанный на прилагаемой схеме. Это двухполюсный статор с тремя фазами, расположенными с интервалом 120 [градусов]. Ток от каждой фазы входит в катушку на одной стороне статора и выходит через катушку на противоположной стороне. Таким образом, если одна из катушек создает магнитный северный полюс, другая катушка (для той же фазы) создаст магнитный южный полюс на противоположной стороне статора.
В Позиции 1 фаза B создает сильный северный полюс вверху слева и сильный южный полюс внизу справа. А-фаза создает более слабый северный полюс внизу слева и более слабый южный полюс внизу. C-фаза создает общее магнитное поле с северным полюсом в левом верхнем углу и южным полюсом в правом нижнем углу.
В Позиции 2 фаза А создает сильный северный полюс внизу слева и сильный южный полюс вверху справа; таким образом, сильные полюса повернулись на 60 [градусов] против часовой стрелки. (Обратите внимание, что это магнитное вращение на 60 [градусов] точно соответствует электрическому изменению фазных токов на 60 [градусов]. ) Слабые полюса также повернулись на 60 [градусов] против часовой стрелки. Фактически это означает, что общее магнитное поле повернулось на 60 [градусов] от положения 1. фаз изменяется более чем на 60 электрических градусов. Анализ позиций 3, 4, 5 и 6 показывает, что магнитное поле продолжает вращаться.
) Слабые полюса также повернулись на 60 [градусов] против часовой стрелки. Фактически это означает, что общее магнитное поле повернулось на 60 [градусов] от положения 1. фаз изменяется более чем на 60 электрических градусов. Анализ позиций 3, 4, 5 и 6 показывает, что магнитное поле продолжает вращаться.
Скорость, с которой вращается магнитное поле, называется синхронной скоростью и описывается следующим уравнением:
S = (f x P) / 120, где S = скорость вращения в оборотах в минуту f = частота подаваемого напряжения (Гц ) P = количество магнитных полюсов во вращающемся магнитном поле
Если бы в этот статор был помещен постоянный магнит с валом, который позволял бы ему вращаться, его толкали бы (или тянули) вперед с синхронной скоростью. Точно так же работает синхронный двигатель, за исключением того, что магнитное поле ротора (поля) создается электромагнетизмом, а не постоянным магнитом.
Ротор асинхронного двигателя состоит из короткозамкнутых обмоток, и в обмотках ротора индуцируется ток, когда вращающееся магнитное поле пересекает их. Этот ток создает поле, противодействующее вращающемуся полю. В результате ротор толкается (или притягивается) вращающимся полем. Обратите внимание, что ротор асинхронного двигателя не может вращаться с синхронной скоростью, поскольку вращающееся поле должно прорезать обмотки ротора, чтобы создать крутящий момент. Разница между синхронной скоростью и фактической скоростью вращения ротора называется процентным скольжением; она выражается в процентах.
Этот ток создает поле, противодействующее вращающемуся полю. В результате ротор толкается (или притягивается) вращающимся полем. Обратите внимание, что ротор асинхронного двигателя не может вращаться с синхронной скоростью, поскольку вращающееся поле должно прорезать обмотки ротора, чтобы создать крутящий момент. Разница между синхронной скоростью и фактической скоростью вращения ротора называется процентным скольжением; она выражается в процентах.
Однофазные двигатели также имеют вращающееся магнитное поле. Вращающееся поле, необходимое для запуска двигателя, создается второй обмоткой, называемой пусковой обмоткой. После разгона двигателя пусковая обмотка отключается, и вращающееся поле создается за счет взаимодействия основной обмотки статора и ротора.
Вопрос № 5: Как работает асинхронный генератор?
Асинхронный генератор по конструкции идентичен асинхронному двигателю. Обмотки статора подключены к трехфазной системе питания, и три фазы создают вращающееся магнитное поле. Ротор асинхронного генератора вращается первичным двигателем, который вращается быстрее синхронной скорости. Когда обмотки ротора пересекают вращающееся поле, в них индуцируется ток. Этот индуцированный ток создает поле, которое, в свою очередь, прорезает обмотки статора, создавая выходную мощность для нагрузки.
Ротор асинхронного генератора вращается первичным двигателем, который вращается быстрее синхронной скорости. Когда обмотки ротора пересекают вращающееся поле, в них индуцируется ток. Этот индуцированный ток создает поле, которое, в свою очередь, прорезает обмотки статора, создавая выходную мощность для нагрузки.
Таким образом, асинхронный генератор получает питание от энергосистемы, к которой он подключен. Асинхронный двигатель должен иметь синхронные генераторы, подключенные к его статору, чтобы начать генерировать. После того, как асинхронный генератор работает, конденсаторы могут использоваться для питания возбуждения.
Вопрос № 6: Почему подшипники генератора и двигателя изолированы?
Магнитное поле внутри двигателя или генератора не совсем однородно. Таким образом, при вращении ротора на валу в продольном направлении (непосредственно вдоль вала) возникает напряжение. Это напряжение вызовет протекание микротоков через смазочную пленку на подшипниках. Эти токи, в свою очередь, могут вызвать незначительное искрение, нагрев и, в конечном итоге, выход из строя подшипника. Чем больше машина, тем хуже становится проблема.
Чем больше машина, тем хуже становится проблема.
Чтобы избежать этой проблемы, корпус подшипника со стороны ротора часто изолируется от стороны статора. В большинстве случаев будет изолирован хотя бы один подшипник, обычно тот, который находится дальше всего от первичного двигателя для генераторов и дальше всего от нагрузки для двигателей. Иногда оба подшипника изолированы.
Вопрос № 7: Как генераторы переменного тока регулируют переменную, напряжение и мощность?
Хотя элементы управления генератором взаимодействуют, верны следующие общие положения.
- Выходная мощность генератора контролируется его первичным двигателем.
- Вклад напряжения и/или реактивной мощности генератора контролируется уровнем тока возбуждения.
Например, предположим, что к выходу генератора подключена дополнительная нагрузка. Добавленный поток тока увеличит силу магнитного поля якоря и заставит генератор замедлиться. Чтобы поддерживать частоту, регулятор генератора увеличивает мощность, подводимую к первичному двигателю. Таким образом, дополнительная мощность, необходимая для генератора, регулируется вводом первичного двигателя.
Таким образом, дополнительная мощность, необходимая для генератора, регулируется вводом первичного двигателя.
В нашем примере чистый магнитный поток в воздушном зазоре уменьшится, так как увеличение якоря противодействует потоку поля. Если не увеличить поток поля, чтобы компенсировать это изменение, выходное напряжение генератора уменьшится. Таким образом, ток возбуждения используется для управления выходным напряжением.
Давайте посмотрим на другой пример для дальнейшего пояснения. Предположим, к нашему генератору добавлена дополнительная нагрузка VAR. В этом случае выходной ток генератора снова возрастет. Однако, поскольку новая нагрузка не является «настоящей» мощностью, первичный двигатель необходимо увеличить лишь настолько, чтобы преодолеть дополнительное падение IR, создаваемое дополнительным током.
В качестве последнего примера предположим, что у нас есть два или более генераторов, работающих параллельно и питающих нагрузку. Генератор 1 (G1) несет всю нагрузку (активную и реактивную), в то время как Генератор 2 (G2) работает с нулевой мощностью и нулевой реактивной мощностью. Если оператор G2 открывает дроссельную заслонку первичного двигателя, G2 начинает подавать ватты в систему. Поскольку подключенная нагрузка не изменилась, оба генератора увеличат скорость, если G1 не снизится.
Если оператор G2 открывает дроссельную заслонку первичного двигателя, G2 начинает подавать ватты в систему. Поскольку подключенная нагрузка не изменилась, оба генератора увеличат скорость, если G1 не снизится.
Поскольку G2 берет на себя дополнительную долю нагрузки, ему требуется повышенный поток поля. Если оператор G2 не увеличивает поле G2, G2 будет получать дополнительное возбуждение от G1, требуя от G1 увеличения уровня возбуждения. Если ни G1, ни G2 не увеличат уровень возбуждения, общее напряжение системы упадет.
Джон Кадик, ЧП является президентом Cadick Professional Services, Гарленд, Техас, международной ассоциации электрических испытаний. (NETA) член.
Вращение ротора двигателей переменного тока
Как упоминалось в нашей предыдущей статье о вращающихся магнитных полях двигателей переменного тока, в этой статье будет рассмотрено, как магнитное поле фактически создает крутящий момент и вращает нагрузку. Если вы новичок в этой серии, вы можете начать с нашей статьи о конструкции двигателей переменного тока.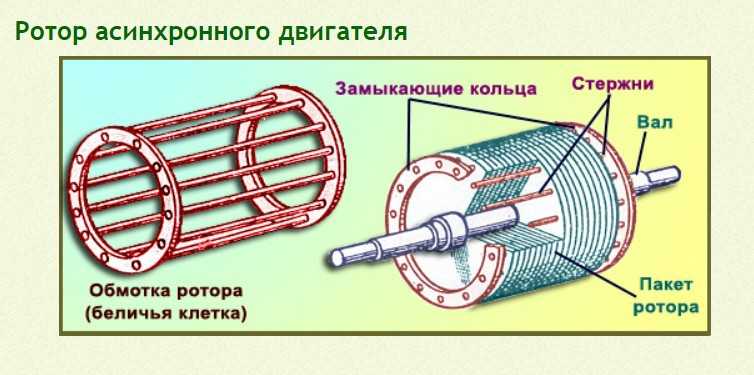 В противном случае мы сразу перейдем к вращению ротора.
В противном случае мы сразу перейдем к вращению ротора.
ПОСТОЯННЫЙ МАГНИТ
Чтобы проиллюстрировать, как работает ротор, представьте, что магнит крепится к валу вместо ротора с короткозамкнутым ротором. Как подробно описано в нашей прошлой статье, когда энергия проходит через обмотки статора, образуется вращающееся магнитное поле. Вращающееся магнитное поле, образованное обмотками статора, затем будет взаимодействовать с отдельным магнитным полем, создаваемым магнитом, установленным на валу. Это взаимодействие между магнитными полями следует основам моторного магнетизма и полярности.
Например, южный полюс магнита притягивается к северному полюсу вращающегося магнитного поля. Точно так же северный полюс магнита притягивается к южному полюсу вращающегося магнитного поля. В результате магнит может вращаться, поскольку его притягивает вращающееся магнитное поле. Эта конструкция, используемая в некоторых двигателях, известна как синхронный двигатель с постоянными магнитами.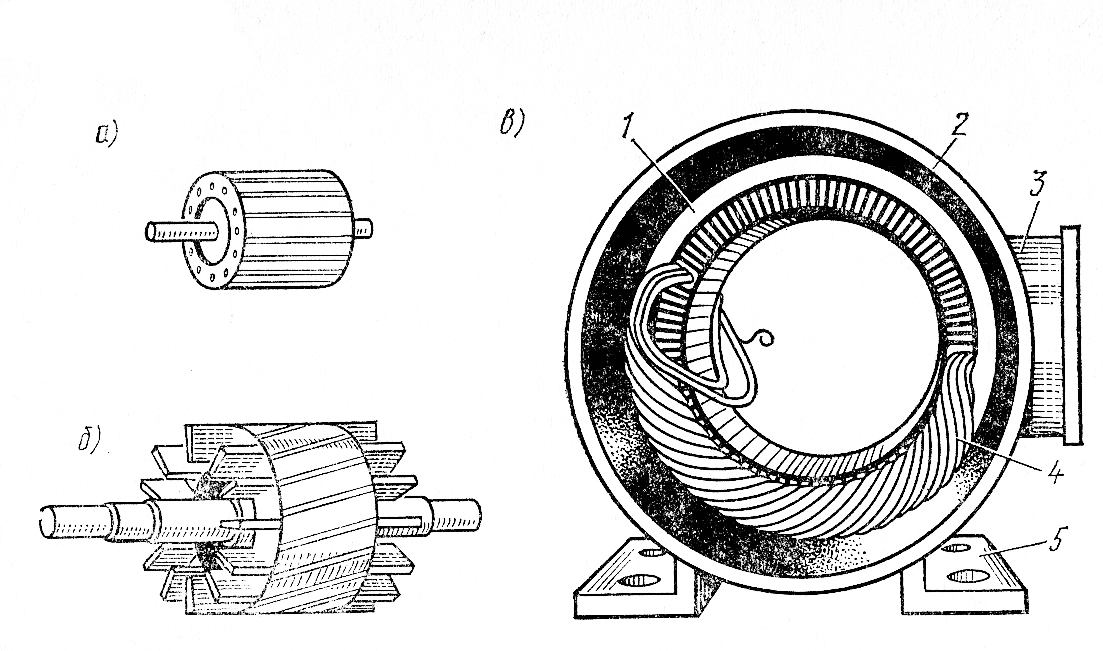
ЭЛЕКТРОМАГНИТ НА ИНДУЦИРОВАННОМ НАПРЯЖЕНИИ
Теперь давайте вернем ротор с короткозамкнутым ротором вместо установленного на валу магнита. В основном они ведут себя одинаково. Если к статору приложить электричество, ток будет течь по обмотке и расширять электромагнитное поле. Это расширенное поле будет пересекать стержни ротора.
Напряжение (или электродвижущая сила [ЭДС]) индуцируется, когда стержень ротора или проводник другого типа входит в магнитное поле. В стержне ротора индуцированное напряжение создает ток. Ток протекает через стержни ротора и вокруг торцевого кольца. По мере протекания тока вокруг каждого стержня ротора создается больше магнитных полей.
В цепи переменного тока постоянно меняются направление и величина тока. Вот почему протекание тока также создает регулярное изменение полярности магнитного поля ротора и статора. В результате ротор с короткозамкнутым ротором образует электромагнит с чередующимися северным и южным полюсами.
На рисунке ниже показан момент времени, когда ток, протекающий через обмотку A1, создает северный полюс. Нарастающее магнитное поле распространяется по соседнему стержню ротора, что индуцирует напряжение. В результате в зубце ротора создается магнитное поле южного полюса. Затем ротор следует за вращающимся магнитным полем статора.
Нарастающее магнитное поле распространяется по соседнему стержню ротора, что индуцирует напряжение. В результате в зубце ротора создается магнитное поле южного полюса. Затем ротор следует за вращающимся магнитным полем статора.
SLIP
Поскольку ротор следует за вращающимся магнитным полем статора, должно быть различие в скорости. Причина этого в том, что если бы оба вращались с одинаковой скоростью, они не разделяли бы относительное движение. Без относительного движения линии потока не были бы перерезаны, а ротор не получил бы индуцированного напряжения. Разница в скорости известна как «скольжение». ДЛЯ СОЗДАНИЯ КРУТЯЩЕГО МОМЕНТА ТРЕБУЕТСЯ ПРОСКАЛЬЗЫВАНИЕ . Величина нагрузки определяет скольжение. Если величина нагрузки увеличивается, скольжение увеличивает или замедляет ротор. Если нагрузка уменьшается, скольжение уменьшится или ускорит ротор. Проскальзывание отображается в процентах и рассчитывается по приведенной ниже формуле.
В качестве примера представьте, что четырехполюсный двигатель с частотой 60 Гц имеет синхронную скорость (NS) 1800 об/мин.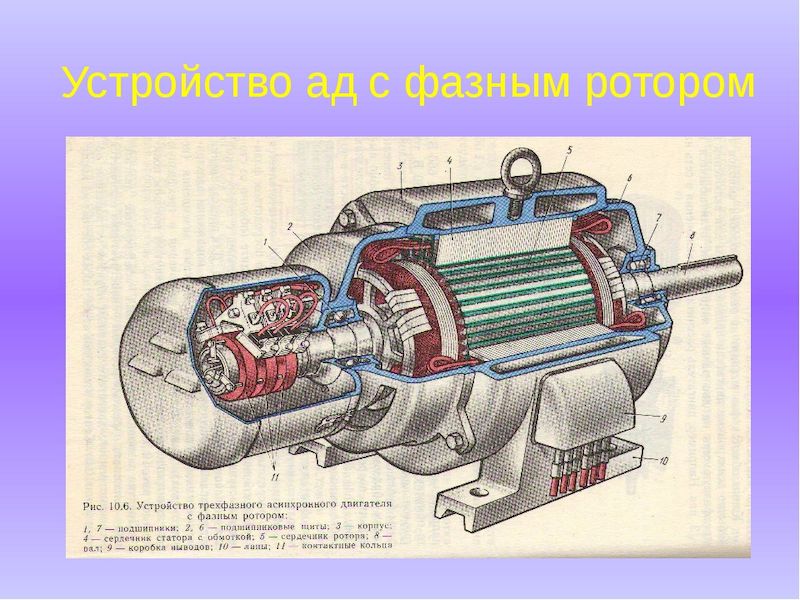 Предположим, что скорость вращения ротора (при полной нагрузке) составляет 1765 об/мин (NR). Если следовать формуле, проскальзывание равно 1,9.%.
Предположим, что скорость вращения ротора (при полной нагрузке) составляет 1765 об/мин (NR). Если следовать формуле, проскальзывание равно 1,9.%.
ДВИГАТЕЛЬ С ОБМОТЧИВЫМ РОТОРОМ
Теперь давайте отойдем от более распространенного ротора с короткозамкнутым ротором и рассмотрим фазный ротор. Одним из отличий ротора с обмоткой от ротора с короткозамкнутым ротором является то, что он состоит из катушек, а не стержней. Эти катушки соединены с внешними переменными резисторами через щетки и контактные кольца. Напряжение в обмотках ротора индуцируется вращающимся магнитным полем. Скоростью двигателя можно управлять, увеличивая или уменьшая сопротивление обмотки ротора:
- Скорость двигателя может быть уменьшил на , увеличив сопротивление обмоток ротора, что вызывает меньший ток.
- Скорость двигателя может быть увеличена на уменьшением сопротивления обмоток ротора, что позволит протекать большему току.
СИНХРОННЫЙ ДВИГАТЕЛЬ
Третьим типом двигателя переменного тока является синхронный двигатель, который не является асинхронным двигателем.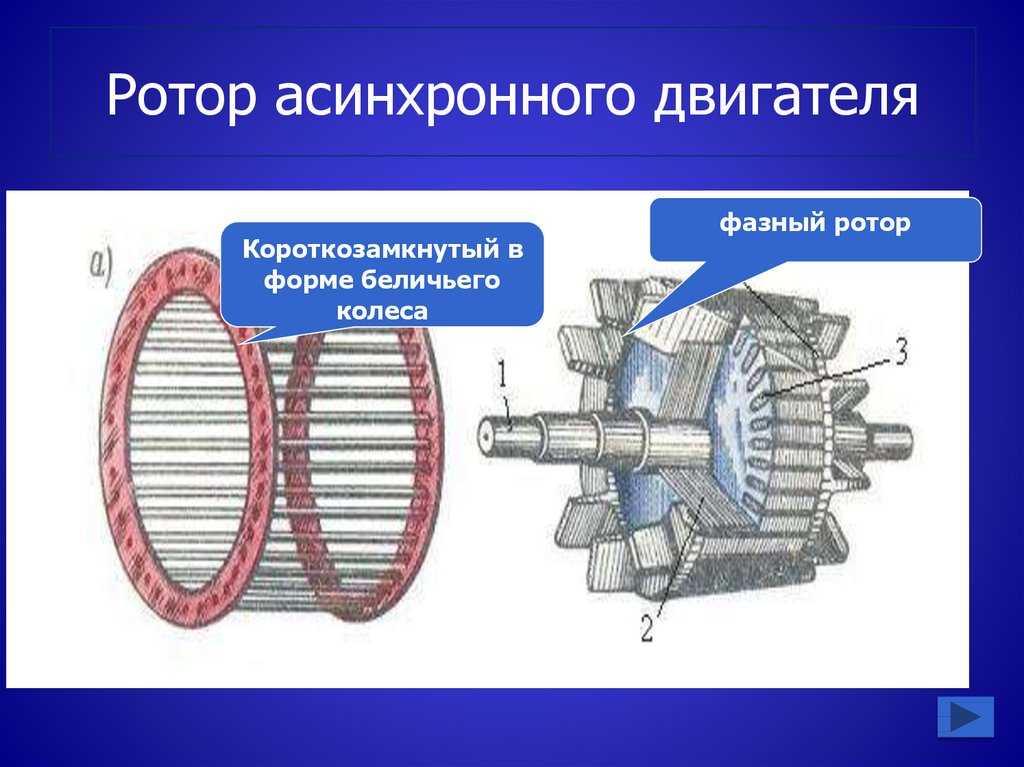 Один тип построен аналогично ротору с короткозамкнутым ротором; однако он имеет обмотку катушки И стержни ротора. Щетки и контактные кольца соединяют обмотки катушки с внешним источником питания постоянного тока. Когда на статор подается переменный ток, синхронный двигатель запускается так же, как ротор с короткозамкнутым ротором. После того, как двигатель достигает максимальной скорости, на обмотки ротора подается постоянный ток. Это создает сильное и постоянное магнитное поле в роторе, которое соответствует вращающемуся магнитному полю. В результате ротор вращается с той же скоростью, что и вращающееся магнитное поле (или с синхронной скоростью). Поэтому проскальзывания нет. Различные типы синхронных двигателей имеют ротор с постоянными магнитами. В этом случае внешний источник постоянного тока не нужен, поскольку ротор представляет собой постоянный магнит. Эти типы можно найти на синхронных двигателях малой мощности.
Один тип построен аналогично ротору с короткозамкнутым ротором; однако он имеет обмотку катушки И стержни ротора. Щетки и контактные кольца соединяют обмотки катушки с внешним источником питания постоянного тока. Когда на статор подается переменный ток, синхронный двигатель запускается так же, как ротор с короткозамкнутым ротором. После того, как двигатель достигает максимальной скорости, на обмотки ротора подается постоянный ток. Это создает сильное и постоянное магнитное поле в роторе, которое соответствует вращающемуся магнитному полю. В результате ротор вращается с той же скоростью, что и вращающееся магнитное поле (или с синхронной скоростью). Поэтому проскальзывания нет. Различные типы синхронных двигателей имеют ротор с постоянными магнитами. В этом случае внешний источник постоянного тока не нужен, поскольку ротор представляет собой постоянный магнит. Эти типы можно найти на синхронных двигателях малой мощности.
УЗНАТЬ БОЛЬШЕ О ДВИГАТЕЛЯХ ПЕРЕМЕННОГО ТОКА
Мы надеемся, что это руководство по вращению ротора двигателей переменного тока помогло вам лучше понять принцип работы электродвигателей. Если вы хотите узнать больше, ознакомьтесь с другими нашими ресурсами, посвященными терминологии двигателей переменного тока и тому, как читать паспортные таблички электродвигателей.
Если вы хотите узнать больше, ознакомьтесь с другими нашими ресурсами, посвященными терминологии двигателей переменного тока и тому, как читать паспортные таблички электродвигателей.
Двигатели переменного тока | Pelonis Technologies, Inc.
Электродвигатели переменного тока
Двигатель переменного тока (AC) преобразует электрическую энергию в механическую. Двигатель питается переменным током, а это означает, что направление потока, окружающего цепь, переключается через равные промежутки времени. В двигателе переменного тока есть несколько компонентов, в том числе неподвижный внешний барабан, ротор, статор и внутренняя часть, которая вращается, прикрепленная к валу двигателя. Статор и ротор создают циркулирующие магнитные поля, а обмотка в двигателе переменного тока служит как обмоткой возбуждения, так и якорем. Воздушный зазор создается, когда статор соединяется с потоком его питания. Это вращает поток с постоянной скоростью, что в конечном итоге создает напряжение в обмотках статора и ротора.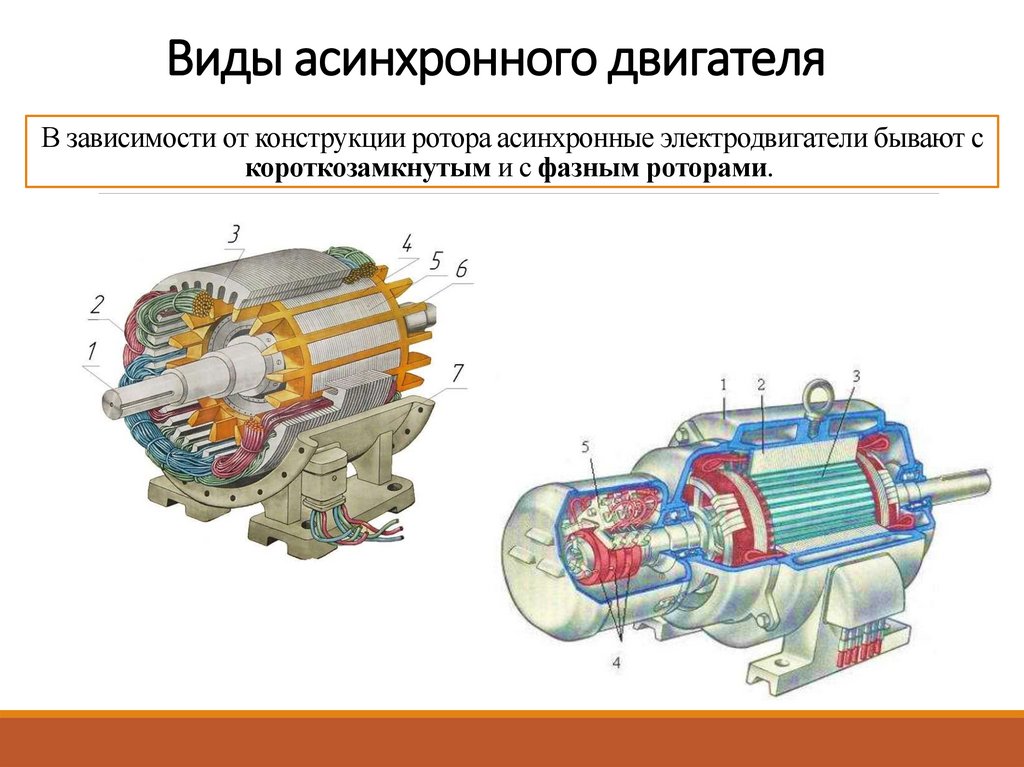
Типы двигателей переменного тока
Доступно множество двигателей переменного тока, и все они служат отдельным и различным целям. Шесть распространенных типов двигателей переменного тока:
- Трехфазные двигатели: Это электрическая машина, преобразующая электрическую энергию в механическую за счет электромагнитного взаимодействия. В классификации трехфазных двигателей переменного тока трехфазный асинхронный двигатель является наиболее распространенным. Их популярность обусловлена тем, что им не нужны пусковые устройства.
- Асинхронные двигатели: Асинхронные двигатели являются наиболее распространенными электродвигателями переменного тока. Эта форма двигателя переменного тока использует электромагнитную индукцию от вращающегося магнитного поля статора для подачи электрического тока в ротор, который затем создает крутящий момент. Ротор асинхронного двигателя представляет собой ротор с короткозамкнутым ротором.


- Асинхронный двигатель с короткозамкнутым ротором: Эта форма асинхронного двигателя основана на законе электромагнетизма. Он получил свое название от ротора внутри, который называется «беличьей клеткой». Это прозвище он получил из-за своего внешнего вида. Цилиндрический ротор покрыт металлом с высокой проводимостью, обычно из алюминия или меди. Когда переменный ток проходит через обмотки статора, он создает вращающееся магнитное поле. Это то, что создает ток в обмотке ротора и создает магнитное поле. Крутящий момент создается за счет взаимодействия магнитного поля между обмоткой статора и ротора.
- Синхронные двигатели: Эти двигатели работают как двигатели переменного тока, но число оборотов вала равно целочисленному множителю частоты подаваемого тока. Этот двигатель не использует индукционный ток для работы, а вместо этого создает крутящий момент за счет магнитных полей, создаваемых многофазными электромагнитами на статоре.

- Двигатель с фазной обмоткой\ Двигатель с фазной обмоткой\ Двигатель с фазным ротором: Часто используемые в подъемниках и лифтах двигатели с фазным ротором или фазным ротором часто используются, поскольку они создают более высокий пусковой момент, чем асинхронные двигатели.
- Однофазные двигатели: Для работы этого двигателя требуется только одна фаза питания. Этот двигатель переменного тока преобразует электрическую энергию в механическую для выполнения физической задачи. Эти типы двигателей переменного тока обычно используются в маломощных устройствах как для бытового, так и для промышленного использования. В этом двигателе используется однофазный источник переменного тока для обмотки статора, который создает магнитное поле, пульсирующее по синусоидальной схеме.
Преимущества двигателей переменного тока
Двигатели переменного тока
имеют ряд преимуществ, в том числе:
- Долговечность: Электродвигатели переменного тока невероятно долговечны. Отсутствие у них щеток означает, что они могут работать намного дольше, чем двигатели постоянного тока, и устраняет проблемы с опасным искрением. Двигатели переменного тока стали предпочтительным вариантом для приложений с фиксированной скоростью как в промышленных, так и в коммерческих целях. Они также популярны в домашних условиях, где можно просто подключить питание переменного тока.
 Отсутствие у них щеток означает, что они могут работать намного дольше, чем двигатели постоянного тока, и устраняет проблемы с опасным искрением. Двигатели переменного тока стали предпочтительным вариантом для приложений с фиксированной скоростью как в промышленных, так и в коммерческих целях. Они также популярны в домашних условиях, где можно просто подключить питание переменного тока.
Отсутствие у них щеток означает, что они могут работать намного дольше, чем двигатели постоянного тока, и устраняет проблемы с опасным искрением. Двигатели переменного тока стали предпочтительным вариантом для приложений с фиксированной скоростью как в промышленных, так и в коммерческих целях. Они также популярны в домашних условиях, где можно просто подключить питание переменного тока.- Запуск с низким энергопотреблением: Еще одним преимуществом двигателей переменного тока является низкая мощность, необходимая для зажигания. Эти двигатели могут более эффективно распределять свою мощность и поддерживать постоянный уровень мощности на протяжении всего внедрения. Они также снижают вероятность выгорания. Это происходит, когда двигатель должен бороться с перегрузкой при запуске.
- Контролируемое ускорение: двигатели переменного тока обеспечивают стабильное и контролируемое движение. Это связано с их возможностями контролируемого ускорения. Это ключевой момент для различных требовательных приложений. Эта форма работы также уменьшает проблемы, связанные с износом, поскольку скорости не колеблются, что сводит к минимуму нагрузку на двигатель.
 Это связано с их возможностями контролируемого ускорения. Это ключевой момент для различных требовательных приложений. Эта форма работы также уменьшает проблемы, связанные с износом, поскольку скорости не колеблются, что сводит к минимуму нагрузку на двигатель.
Это связано с их возможностями контролируемого ускорения. Это ключевой момент для различных требовательных приложений. Эта форма работы также уменьшает проблемы, связанные с износом, поскольку скорости не колеблются, что сводит к минимуму нагрузку на двигатель.- Высокая скорость: двигатели переменного тока способны поддерживать и развивать высокие скорости. Это делает их превосходными для широкого спектра сложных промышленных применений.
Отрасли и приложения
Двигатели переменного тока
используются в самых разных областях по всему миру, особенно в индустрии отдыха, ОВКВ и здравоохранении. Они также часто встречаются в конвейерных лентах или системах, кондиционерах, вентиляторах и бытовой технике.
Инновационные решения для двигателей переменного тока в Pelonis Technologies
Pelonis Technologies — ведущий производитель асинхронных двигателей для коммерческого и промышленного применения.