Расчет мощности электродвигателя
— задача, которая на первый взгляд выглядит несколько странной: чего рассчитывать, если мощность электромотора в обязательном порядке указывается в сопроводительной документации, да и на самом двигателе тоже? Однако не все так просто — в разных режимах работы электродвигатель может показывать весьма различную мощность — и то, какой она будет, сильно зависит от того, как электромотор используется. А так как
асинхронный двигатель
самый распространенный в быту, все расчеты будут приводиться именно для этого типа.
В общем случае для квалифицированного подбора
электродвигателя
должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
1. Вентилятор
где Q [м3/с] – производительность вентилятора,
Н [Па] – давление на выходе вентилятора,
ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно,
kз – коэффициент запаса.
Но расчет необходимой мощности электродвигателя
будет выглядеть несколько хитрее, если электромотор должен работать в насосе или компрессоре.
2. Насос
k3 — коэффициент запаса, принимаемый как 1,1-1,3 в зависимости от мощности электродвигателя, где:
Q [м3/с] – производительность насоса,
g=9,8 м/с2 – ускорение свободного падения,
H [м] – расчетная высота подъема,
ρ [кг/м3] – плотность перекачиваемой жидкости,
ηнас, ηпер – КПД насоса и передаточного механизма соответственно,
kз – коэффициент запаса.
3. Поршневой компрессор
Где:
Q [м3/с] – производительность компрессора,
А [Дж/м3] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м3 давлением 1,1·105 Па до требуемого давления,
ηк, ηп – КПД компрессора и передаточного механизма соответственно,
kз – коэффициент запаса.
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением:
Важно отметить следующее:
1. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
2. Необходимо учитывать то, что наиболее нагруженными в двигателе являются подшипниковые узлы. В связи с этим необходимо учитывать радиальные и осевые усилия, действующие на вал двигателя. Превышения допустимых значений сил приводит к кратному уменьшению срока службы, а в некоторых случаях и выходу из строя не только подшипников, но и всего двигателя.
3. В случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки.
Широкий ассортимент электродвигателей
представлен в ТВК «ЭлектроЦентр» и на сайте интернет-магазина stv39. ru.
Ссылка
Отключить автозагрузку страниц
1. Общие положения
1.1. Настоящее Пользовательское соглашение (далее – Соглашение) относится к сайту Интернет-магазина stv39.ru, расположенному по адресу 238311, Калининградская обл., Большое Исаково, ул. Старокаменная, дом. 35, и ко всем соответствующим сайтам, связанным с сайтом stv39.ru.
1.3. Настоящее Соглашение регулирует отношения между Администрацией сайта Интернет-магазина stv39.ru (далее – Администрация сайта) и Пользователем данного Сайта
1.4. Администрация сайта оставляет за собой право в любое время изменять, добавлять или удалять пункты настоящего Соглашения без уведомления Пользователя.
1.5. Продолжение использования Сайта Пользователем означает принятие Соглашения и изменений, внесенных в настоящее Соглашение.
1.6. Пользователь несет персональную ответственность за проверку настоящего Соглашения на наличие изменений в нем.
Полная версия документа
Быстрый заказ
Прошу перезвонить
Контактный телефон * Кого спросить *
Пн—Пт 8:30 — 18:30. Сб 9:00 — 18:00.
Вс — выходной
Я соглашаюсь на условия
обработки моих данных
Товар добавлен в корзину (раздел «Под заказ/Товар в пути»).
OK
Товар удален из корзины.
OK
Заказ оформлен. Менеджер свяжется с Вами.
OK
Файл готовится…
OK
Корзина не доступна в связи с переездом. С 12 по 23 апреля 2019г.
OK
Добавление в корзину не доступно в связи с переездом. С 12 по 23 апреля 2019г.
OK
Операции с заказами не доступны в связи с переездом. С 12 по 23 апреля 2019г.
OK
Электромагнитная мощность и потери в асинхронном двигателе
Мощность, потребляемая двигателем из сети, определяется по формуле
Р1 = √3 U1I1cos φ1.
Часть этой мощности (рис. 10.16) теряется в обмотке статора:
ΔРобм1 = 3 I12r1,
Рис. 10.16. Потери мощности в асинхронном двигателе
а часть, ΔРст1, составляет потери в сердечнике статора от перемагничивания и вихревых токов.
Мощность, передаваемая вращающимся магнитным полем ротору, называется электромагнитной мощностью и составляет
Часть электромагнитной мощности теряется в обмотке ротора:
ΔРобм2 = 3 I22r2, (10,35)
а часть, ΔРст2, составляет потери в сердечнике ротора от гистерезиса и перемагничивания.
Мощность, преобразуемая в механическую, равна
Рмех = Рэм — ΔРобм2 — ΔРст2. (10,36)
Небольшая часть механической мощности теряется на тре-ние в подшипниках ротора о воздух и вентиляцию.
Мощность, развиваемая двигателем на валу,
Рв = Рмех — ΔРмех . (10,37)
Все потери мощности, кроме вентиляционных, которые представляют собой затраты мощности на продувание воздуха внутри двигателя с целью лучшего охлаждения, превращаются в теплоту и нагревают двигатель.
Известно, что мощность равна произведению момента на частоту вращения:
Р = Мω.
В асинхронном двигателе произведение электромагнитного момента, возникающего в результате взаимодействия тока ротора с магнитным полем, на частоту вращения поля представляет собой электромагнитную мощность:
Мэмω0 = Рэм. (10,38)
Механическая мощность, развиваемая двигателем, равна произведению электромагнитного момента на частоту вращения ротора.
Мэмω = Рмех. (10,39)
Если пренебречь потерями мощности в сердечнике ротора вследствие их малости относительно потерь в обмотке ротора, то разность электромагнитной и механической мощностей, как следует из (10.36), будет равна потерям мощности в обмотке ротора1:
Рэм — Рмех = ΔРобм2 = 3 I22r2. (10,40)
Подставив в (10.40) вместо мощности их значения из (10. 38) и (10.39), получим
Мэмω0 — Мэмω = 3 I22r2,
откуда
Мэм =
3 I22r2
.
ω0 — ω
Заменив ω0 — ω через ω0s, что вытекает из (10.23), получим выражения электромагнитного момента
Мэм =
3 I22r2
.
ω0s
(10. 41)
1 Короткозамкнутая обмотка ротора имеет не три, а m фаз. Для общности выводов обмотка ротора приведена к трем фазам, которые имеют обмотки статора и ротора двигателя с фазным ротором.
и электромагнитной мощности
Pэм =
3 I22r2
.
s
(10.42)
Момент, развиваемый двигателем на валу, будет меньше электромагнитного момента на величину ΔМмех, обусловленную силами трения в подшипниках, ротора о воздух и вентиляционными потерями:
М = Мэм — ΔМмех .
Потери момента ΔМмех для асинхронных двигателей средней и большой мощности относительно малы, и ими обычно пренебрегают. В практических расчетах часто принимают, что
М = Мэм. (10,43)
В выражении (10.41) отсутствует магнитный поток, что на первый взгляд противоречит принципу действия двигателя. Однако легко показать, что это не так: магнитный поток вошел в уравнение в неявном виде.
Выразив в (10.41) потери мощности в обмотке I22r2 через ЭДС, ток и cos ψ2 ротора
/\
3I22r2 = 3E2I2 cos (
E2, I2
) = 3E2I2 cos ψ2,
Получим
Mэм =
3E2I2 cos ψ2
.
ω0s
(10.44)
Подставляя в (10.44) вместо ЭДС Е2 ее значение из (10.27) и учитывая (10.42), получаем
Mэм =
3E2кsI2 cos ψ2
=
3•4,44f1w2Фk02I2 cos ψ2
= CФI2 cos ψ2,
ω0s
ω0
(10.45)
где С = 3 • 4,44f1w2k02/ω0 — конструктивный коэффициент, обусловливающий момент двигателя.
Используя выражения (10.40), (10.42), можно получить два соотношения:
потери в обмотке ротора
ΔPобм2 = Pэмs;
механическая мощность, развиваемая двигателем,
Pмех = Pэм(1 — s)
Из этих выражений вытекает, что при неподвижном роторе, когда s = l, вся электромагнитная мощность преобразуется в теплоту в обмотке ротора, а механическая мощность равна нулю. При номинальном режиме работы, когда s≈ 0,02 — 0,08, почти вся электромагнитная мощность (0,92 — 0,98) преобразуется в механическую и только небольшая ее часть (0,02 — 0,08) преобразуется в теплоту в обмотке ротора.
СХЕМА ЗАМЕЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Для анализа работы асинхронного двигателя пользуются схемой замещения. Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и представляет собой электрическую схему, в которой вторичная цепь (обмотка ротора) соединена с первичной цепью (обмоткой статора) гальванически вместо магнитной связи, существующей в двигателе.
Рис. 10.17. Схема замещения асинхронного двигателя
Основное отличие асинхронного двигателя от трансформатора в энергетическом отношении состоит в следующем. Если в трансформаторе энергия, переданная переменным магнитным полем во вторичную цепь, поступает к потребителю в виде электрической энергии, то в асинхронном двигателе энергия, переданная вращающимся магнитным полем ротору, преобразуется в механическую и отдается валом двигателя потребителю в виде механической энергии.
Электромагнитные мощности, передаваемые магнитным полем во вторичную цепь трансформатора и ротору двигателя, имеют одинаковые выражения:
Рэм = Р1 — ΔР1.
В трансформаторе электромагнитная мощность за вычетом потерь во вторичной обмотке поступает к потребителю:
где rп — сопротивление потребителя. В асинхронном двигателе электромагнитная мощность за вычетом потерь в обмотке ротора превращается в механическую мощность:
Подставив в (10.47) вместо Р ее значение из (10.42), получим
Pмех=3I22
r2(1 — s)
=3I’22
r’2(1 — s)
= 3I22r’э = 3I’22r’э,
s
s
где r’э = r’2
1 — s
.
s
(10,48)
Сравнивая выражения (10.46) и (10.48), можно заключить, что
r’п = r’э.
Таким образом, потери мощности в сопротивлении r’э численно равны механической мощности, развиваемой двигателем.
Заменив в схеме замещения трансформатора сопротивление нагрузки r’п на r’э = r’2 (1 — s)/s,получим схему замещения асинхронного двигателя (рис. 10.17). Все остальные элементы схемы замещения аналогичны соответствующим элементам схемы замещения трансформатора: r1, х1 — активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки статора; r’2, х’2— приведенные к обмотке статора активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки ротора.
Приведенные значения определяются так же, как и для трансформатора:
r’2 = r2k2, х’2 = х2k2,
где k = E1/E2к = U1ф/E2к — коэффициент трансформации двигателя.
Может возникнуть сомнение в возможности использования гальванической связи цепей статора и ротора в схеме замещения, поскольку частоты в этих цепях на первый взгляд не одинаковы. Первая часть схемы замещения представляет собой эквивалентную схему фазы обмотки ротора, которая, как было показано в § 10.7, приведена к частоте тока статора. В реальном же двигателе в отличие от схемы замещения частоты тока ротора и статора не одинаковы.
Коэффициент мощности (cos φ, косинус фи ), Полная (кажущаяся), активная и реактивная мощность электродвигателя=электромотора и не только его. Коэффициент мощности для трехфазного электродвигателя.
ГОСТы, СНиПы
Карта сайта TehTab.ru
Поиск по сайту TehTab.ru
Навигация по справочнику TehTab.ru: главная страница / / Техническая информация/ / Физический справочник/ / Электрические и магнитные величины/ / Понятия и формулы для электричества и магнетизма. / / Коэффициент мощности (cos φ, косинус фи ), Полная (кажущаяся), активная и реактивная мощность электродвигателя=электромотора и не только его. Коэффициент мощности для трехфазного электродвигателя.
Коэффициент мощности (cos φ, косинус фи ), Полная (кажущаяся), активная и реактивная мощность электродвигателя=электромотора и не только его. Коэффициент мощности для трехфазного электродвигателя.
На шильдиках многих электромоторов (электродвигателей и др. устройств) указывают активную мощность в Вт и cosφ / или λ /или PF. Что тут к чему см. ниже.
Подразумеваем,что переменное напряжение в сети синусоидальное — обычное, хотя все рассуждения ниже верны и для всех гармоник по отдельности других периодических напряжений.
Полная, или кажущаяся мощность S (apparent power) измеряется в вольт-амперах (ВА или VA) и определяется произведением переменных напряжения и тока системы. Удобно считать, что полная мощность в цепи переменного тока выражается комплексным числом таким, что активная мощность является его действительной частью, реактивная мощность — мнимой.
угол φ -это угол между фазой напряжения и фазой тока, называемый еще сдвигом фаз, при этом, если ток отстаёт от напряжения, сдвиг фаз считается положительным, если опережает его, то отрицательным
величина sin φ для значений φ от 0 до плюс 90° является положительной величиной. Величина sin φ для значений φ от 0 до -90° является отрицательной величиной
если sin φ>0, то нагрузка имеет активно-индуктивный характер (электромоторы, трансформаторы, катушки…) — ток отстает от напряжения
если sin φ<0, нагрузка имеет активно-ёмкостный характер — (конденсаторы…) — ток опережает напряжение
Все соотношения между P, S и Q определяются теоремой Пифагора и элементарными тригонометрическими тождествами для прямоугольного треугольника
Активная мощность P (active power = real power =true power) измеряется в ваттах (Вт, W) и это та мощность, которая потребляется электрическим сопротивлением системы на тепло и полезную работу. Для сетей переменного тока:
P=U*I*cosφ, где U и I — действующие=эффективные=среднеквадратичные значения напряжения и тока, а φ- сдвиг фаз между ними
Реактивная мощность Q (reactive power) измеряется в вольт-амперах реактивных (вар, var) и это электромагнитная мощность, которая запасается и отдается обратно в сеть колебательным контуром системы. Реактивная мощность в идеале не выполняет работы, т.е. название вводит в заблуждение. Легко догадаться глядя на рисунок, что:
P=U*I*sinφ, где U и I — действующие=эффективные=среднеквадратичные значения напряжения и тока, а φ- сдвиг фаз между ними
Сама концепция активной и реактивной мощности актуальна для устройств (приемников) переменного тока. Она малоактуальна=никогда не упоминатеся для приемников постоянного тока в силу малости (мизерности) соответствующих эффектов, связанных только с переходными процессами при включении/выключении.
Любая система, как известно, имеет емкость и индуктивность = является неким колебательным контуром. Переменный ток в одной фазе накачивает электромагнитное поле этого контура энергией а в противоположной фазе эта энергия уходит обратно в генератор ( в сеть). Это вызывает в РФ 3 проблемы (для поставщика энергии!)
Хотя теоретически, при нулевых сопротивлениях передачи, на выработку реактивной мощности не тратится мощность генератора, но практически для передачи реактивной мощности по сети требуется дополнительная, активная мощность генератора (потери передачи).
Сеть должна пропускать и активные и реактивные токи, т.е иметь запас по пропускным характеристикам.
Генератор мог бы, выдавая те же ток и напряжение, поставлять потребителю электроэнергии больше активной мощности.
попробуем догадаться, что делает поставщик электроэнергии? Правильно, пытается навязать Вам различные тарифы для разлиных значений cos φ. Что можно сделать: можно заказать компенсацию реактивной мощности ( т.е. установку неких блоков конденсаторов или катушек), которые заставят реактивную нагрузку колебаться внутри Вашего предприятия/устройства. Стоит ли это делать? Зависит от стоимости установки, наценок за коэффициент мощности и очень даже часто не имеет экономического смысла. В некоторых странах качество питающего напряжения тоже может пострадать от избытка реактивной мощности, но в РФ проблема неактуальна в силу изначально очень низкго качества в питающей сети.
Естественно, хотелось бы ввести величину, которая характеризовала бы степень линейности нагрузки. И такая величина вводится под названием коэффициент мощности («косинус фи», power factor, PF), как отношение активной мощности к полной, естественно сразу в 2-х видах, в РФ это:
λ=P/S*100% — то есть, если в %, то это лямбда, P в (Вт), S в (ВА)
cosφ=P/S — более распространенная величина , P в (Вт), S в (ВА)
Коэффициент мощности для трехфазного асинхронного (обычного) электродвигателя.
cosφ = P / (√3*U*I)
где
cosφ = косинус фи
√3 = квадратный корень из трех
P = активная мощность (Вт)
U = Напряжение (В)
I = Ток (А)
Дополнительная информация от TehTab.ru:
Нашли ошибку? Есть дополнения? Напишите нам об этом, указав ссылку на страницу.
Обращаем ваше внимание на то, что данный интернет-сайт носит исключительно информационный характер. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления. Все риски за использование информаци с сайта посетители берут на себя. Проект TehTab.ru является некоммерческим, не поддерживается никакими политическими партиями и иностранными организациями.
Мощность и вращающий момент электродвигателя. Что это такое?
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила — любая сила — вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.
Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.
Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Механическая характеристика
Как основная, помогает проводить детальный анализ работы электродвигателя. Она выражает непосредственную зависимость частоты вращения самого ротора от электромагнитного момента n=f (M).
Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Точка 2 — номинальный режим работы. Точка 3 — частота вращения достигла критического значения. Пусковой момент Мпуск — точка 4.
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Существуют технические способы расчетов и построения механической характеристики с учетом данных паспорта.
В первоначальной точке 1 n0=60f/p (p – количество пар полюсов). Поскольку nн и Mн непосредственно координаты точки 2, расчет номинального момента производится по формуле Mн=9,55*Рн/ nн, где Рн — номинальная мощность. Значение nн указано в паспорте двигателя. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск — из паспорта).
Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику.
Полученные результаты дают возможность проанализировать и согласовать механические свойства самого двигателя и рабочего механизма.
Потребляемая мощность электродвигателя
Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.
В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Момент электродвигателя
Мощность [кВт или л.с.]связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени.
Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos. Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.
Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
Графическое представление вращающего момента электродвигателя изображено на рисунке.
Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока.
Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т.е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
Блокировочный момент (Мблок): Максимальный вращающий момент — момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом.
Вращающий момент при полной нагрузке (Мп.н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
Вращающий момент асинхронного электродвигателя создается, как уже указывалось, за счет взаимодействия между вращающимся магнитным потоком статора и токами в обмотке ротора. Вполне понятно, что при отсутствии тока в обмотке ротора никакого момента создаваться не будет. Скольжение характеризует скорость вращения ротора относительно магнитного поля статора. От величины этой скорости зависит ток в роторе, а от тока—величина вращающего момента электродвигателя, который может быть вычислен по формуле (6). Но выражение (6), несмотря на свою простоту, не дает возможности выяснить влияние различных факторов на величину вращающего момента. Поэтому в курсе электротехники часто используют другое выражение:
где с — постоянная величина, зависящая от конструкции электродвигателя;
?1 —угловая скорость вращающегося магнитного поля.
Выражение (90) показывает, что вращающий момент пропорционален квадрату напряжения сети, в связи с чем даже небольшое уменьшение напряжения в питающей сети приводит к резкому снижению вращающего момента, что отрицательно сказывается на работе электродвигателя.
Кроме того, выражение (90) учитывает зависимость величины вращающего момента от активных и индуктивных сопротивлений электродвигателя, а также от скольжения.
Если обозначить (х1 + сх2) через х и выполнить несложные преобразования в формуле (90), то получим
Величинами r1 s и x2 s2 можно пренебречь, ввиду их малости. Тогда, до некоторого предела
Таким образом доказано, что с увеличением скольжения возрастает и момент электродвигателя.
Более точный анализ выражений (90) и (91) показывает, что момент с увеличением скольжения возрастает лишь до некоторого критического значения Мкрит (так называемый опрокидывающий момент), после чего начинается резкое его снижение.
Величина критического скольжения, при которой имеет место опрокидывающий момент,
Подставляя это выражение в уравнение (91), получим
В последних выражениях знак плюс относится к работе электродвигателя в режимах двигательном и торможения противовключением, а знак минус — к работе в генераторном режиме с отдачей энергии в сеть. Очевидно, что критический момент в двигательном режиме меньше, чем в генераторном.
Зависимость М = f (s), построенная по уравнению (91), приведена на рис. 42, который показывает, что при трогании электродвигателя с места, когда скольжение s=1, начальный пусковой момент асинхронного электродвигателя невелик, что является его основным недостатком.
Выражения (93) и (94) показывают, что при изменении активного сопротивления роторной цепи величина опрокидывающего момента Мкрит не изменяется, меняется при этом лишь величина критического скольжения sкрит. Поэтому при различных активных сопротивлениях роторной цепи кривые М = f(s) имеют различный характер. Эти кривые показывают, что пусковой момент асинхронного электродвигателя с фазным ротором можно искусственным образом изменять, вводя различные активные сопротивления в
его роторную цепь. Таким же образом можно регулировать скорость электродвигателя, так как при изменении активного сопротивления роторной цепи меняется величина скольжения (рис. 43), а от скольжения, как показывает выражение (82), зависит число оборотов асинхронного электродвигателя.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Характеристики асинхронного двигателя
К энергетическим характеристикам асинхронного двигателя относятся КПД двигателя(η) коэффициент мощности (cosφ) и скольжение S. коэффициент полезного действия (η) вычисляется как отношение полезной мощности на валу двигателя Р2 кВт, к активной мощности, потребляемой двигателем из сети Р1 кВт; η = Р2/ Р1 коэффициент мощности (cos(φ)вычисляется как отношение потребляемой активной мощности Р1 кВт, к полной мощности, потребляемой из сети S1 кВА;
По ГОСТ Р. 51677-2000 асинхронные двигатели общепромышленного назначения делятся на двигатели с нормальным КПД и двигатели с повышенным КПД. У асинхронных двигателей с повышенным КПД, суммарные потери не меньше, чем на 20%, чем у двигателей с нормальным КПД такой же мощности и частоты вращения. Коэффициенты мощностей (cosφ) асинхронных двигателей определены в ГОСТ.Р 51677. Значения КПД и cosφ конкретного асинхронного двигателя можно узнать по каталогу или по шильдику.
Причем КПД и cosφ асинхронного двигателя определяются и нагрузкой машины. В справочниках по электрическим машинам можно увидеть эти зависимости.
Линейный ток двигателя можно определить исходя из номинальной полезной мощность (Р2, кВт), номинального напряжения (UH, В ), КПД (η) и cosφ.
Мощность, потребляемая из сети можно определить из формулы:
Скольжение вычисляется как разницу между номинальной n1 и синхронной nc частотой вращения двигателя, приведенной к номинальной скорости двигателя n1:
Номинальную частоту вращения ротора n1 или скольжение (S, %)можно определить по каталогу двигателя или прочесть на его шильдике.
Механические и пусковые характеристики асинхронного двигателя
Одной из основных характеристик асинхронного двигателя, является механическая характеристика. Механической характеристикой называют зависимость скорости вращения или скольжения от вращающего момента на валу двигателя. Она позволяет сравнить и согласовать механические свойства двигателя и рабочего механизма. Соответственно, зависимость скорости вращения или скольжения от тока статора называют электромеханической характеристикой.
Механическая характеристика асинхронного двигателя определяет зависимость момента на валу двигателя от скольжения, при сохранении неизменного напряжении и частоты питающей сети
Пусковые характеристики определяют величину пускового моментаMп, минимального момента Мmin, максимального или критического момента Мкр., пускового тока Iп или пусковой мощности Sп или их отношениями. Диаграмма момента, приведенного к номинальному моменту, от скольжения получила название относительной механической характеристики.
Номинальный вращающий момент можно определить по формуле:
P2н- номинальная мощность , кВт, N1н- номинальная частота вращенияю, об/мин.
Пусковые характеристики асинхронного двигателя
Пусковые характеристики асинхронного двигателя регламентирует ГОСТ 28327 ( МЭК 60034 — 12), а их значения приводятся в каталогах. Стандартные асинхронные двигатели могут иметь два исполнения по механическим характеристикам, которые определены в ГОСТ 28327 и МЭК 60034-12: N – двигатели с нормальный моментом; Н –двигатели с повышенным моментом.
Двигатели , изготовленные в исполнении N, рассчитывают на два последовательных пуска с остановкой между пусками из холодного состояния или на один пуск из нагретого состояния, после работы при номинальной нагрузке.
Момент сопротивления нагрузки при запуске прямо пропорционален квадрату частоты вращения и равняется номинальному моменту при номинальной частоте вращения, а значение внешнего момента инерции, γ , кг*м2, не должно превышать рассчитанного по формуле
где Р-номинальная мощность двигателя, кВт; р — число пар полюсов;
При построении характеристики предполагается, что момент сопротивления нагрузки остается постоянным и равен номинальному моменту. Кроме того он не зависит от частоты вращения. Значение же внешнего момента инерции не превышаетт 50% величины, полученной по приведенной выше формуле.
Механические характеристики асинхронных мшин зависят в том числе и от типа ротора, его номинальной мощности, и от числа пар полюсов.
Ввиду того, что разность в значениях момента при соответствующих скольжениях у двигателей с различным числом пар полюсов невелика, и не превышает значения поля допуска на моменты. Различные механические характеристики для разных исполнений асинхронных двигателей показаны на рис
1 — исполнение N; 2 — исполнение Н; 3 — с повышенным скольжением. Механические характеристики группы двигателей, одной серии, или ее части обычно укладываются в некоторую зону. По средней линии этой зоны можно составить групповую механическую характеристику. Величина зоны групповой характеристики меньше поля допуска двигателей на моменты.
Соответствие электродвигателя нагрузке
Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса.
Если мы посмотрим на характеристику , то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки.
Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева.
Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности.
Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени.
Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса.
Время пуска электрдвигателя
Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий.
Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:
tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке
n = частота вращения электродвигателя при полной нагрузке
Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс.
Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных.
Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения.
Мизб можно рассчитать по следующим формулам:
Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды.
Число пусков электродвигателя в час
Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса.
Момент асинхронного электродвигателя
Эквивалентная схема асинхронного электродвигателя, рассмотренная в предыдущей статье, дает возможность получить выражение электромагнитного момента, который развивает асинхронный электродвигатель. Мощность, которая потребляется электрической машиной из сети, будет расходоваться не только на полезную работу, но и потери в контуре намагничивания и в обмотках.
Поэтому выражение мощности будет иметь вид:
На основании формулы (1) можно получить такое уравнение:
В свою очередь мощность электромагнитную можно выразить и таким способом:
Из выше перечисленных уравнений можем получить значение электромагнитного момента:
Помножив знаменатель и числитель этого выражения на S2 и в целях упрощения вида уравнения примем значение Хк = Х1 + Х2/. Хк – сопротивление индуктивное асинхронного электродвигателя при коротком замыкании:
Для упрощения записи, как в равенстве (5), индекс «эм» будет пропускаться.
Момент электромагнитный асинхронной машины представляет собой довольно сложную функцию скольжения S. Для того, чтоб найти максимум момента асинхронной машины приравняем производную S нулю:
Производная станет равна нулю только в том случае, если стоящий в скобках числителя множитель равен будет нулю:
Или же:
Откуда можно выразить скольжение:
Sк называют критическим, так как при переходе S = Sк момент двигателя уменьшится. Это происходит из-за того, что при увеличении роторного тока (S > Sк) его активная часть не вырастет, а наоборот, уменьшится, что в свою очередь приведет к снижению момента.
Если Sк положительно – это режим работы двигательный, а если отрицательный – генераторный.
В асинхронных машин большой мощности r1 значительно меньше, чем Хк, и, как правило, лежит в пределах r1 = 0,1 – 0,12Хк. Поэтому величина r12 существенно мала, по сравнению Хк, и ею можно пренебречь без ущерба для точности:
Подставив положительные значения Sк (6) в выражение (5), найдем значение критического момента для двигательного режима:
Раскрыв скобки в знаменателе (8) и сократив дробь величине Мкд получим:
Для машин большой мощности для которых величиной r1 можно пренебречь выражение (9) примет вид:
Аналогичным образом получается значение критического момента для генераторного режима:
Отношение моментов генераторного и двигательного режимов работы АД:
Поделив числитель и знаменатель на и обозначив соотношение выражение (12) примет вид:
Также ε можно еще выразить как:
Так как асинхронные электродвигатели обычно имеют r1 ≈ r2/, то приближенно можем принять:
Из выражений (12) и (13) можно увидеть, что в генераторном режиме значение критического момента будет больше, чем в двигательном. Это объясняется влиянием падения напряжения в активном сопротивлении статорной обмотки.
Отношение момента электромагнитного, к его критическому значению в двигательном режиме Мдк = Мк, будет иметь вид:
Откуда выражаем:
Данное выражение представляет собой уточненное уравнение механической характеристики асинхронного электродвигателя.
Если принять, как это делалось выше, r1 = 0, то тогда ε = 0 и взамен (15) получим упрощенное уравнение для механической характеристики:
М, выраженный формулами (5), (15) и (16), является функцией скольжения S. Задаваясь различными значениями скольжения S можно построить механическую характеристику асинхронной машины.
Ниже показана механическая характеристика построенная по формуле (15):
Для машин асинхронных трехфазных с короткозамкнутым ротором общего применение мощностью 0,6 – 100 кВт соотношение должны лежать в пределах 1,7 – 2,2; причем большее значение соответствует большей скорости вращения ротора 3000 об/мин, а меньшее — 750 об/мин. Для машин мощность свыше 100 кВт должны иметь λм = 1,7 – 1,8. Для крановых и металлургических:
Уравнения (15) и (16) имеют значительное преимущество перед уравнением (5) в том, что нет необходимости знать параметры обмоток асинхронной машины и можно вести расчет по каталожным данным электродвигателя.
Но в каталожных данных значение критического скольжения не приводится и их приходится определять из соотношений (15) и (16), используя значения перегрузочных способностей машин λм.
Записав уравнение механической характеристики для Мном получим:
Данное равенство можно представить в виде квадратного уравнения относительно Sк:
Решив его:
В электрических двигателях большой мощности ε ≈ 0 и уравнение для Sк будет иметь вид более простой:
В выражениях (17) и (18) перед корнем следует брать знак плюс, так как отрицательный знак соответствует нахождению точки Sном, Мном на механической характеристике в зоне где S>Sк. Практического применения данный случай не имеет, поэтому второе решение отбрасывается.
Приведенные выше механические характеристики (5), (15), (16) справедливы только при оговоренных выше ограничениях. Асинхронные электродвигатели имеющие фазный ротор имеют характеристики достаточно точно описываемые данными уравнениями. В машинах с короткозамкнутым ротором имеется процесс вытеснения тока в стержнях ротора. Следствием чего становится непостоянство их параметров и механические характеристики могут значительно отличатся от построенных по формулам (5), (15), (16). Однако от этого данные формулы (особенно (15), (16)) не теряют своего значения, так как благодаря своей простоте они позволяют производить многие расчеты и делать общие заключения о работе асинхронных машин. В случаях когда необходима большая точность применяют экспериментально снятые или специально рассчитанные механические характеристики.
В качестве примера ниже показаны механические характеристики некоторых типов электродвигателей с КЗ ротором:
Похожие материалы:
Как контроллер микрошагов обеспечивает более плавное…
Мощность электродвигателя через крутящий момент
Расчет крутящего момента электродвигателя
Крутящий момент электродвигателя – это сила вращения его вала. Именно момент вращения определяет мощность Вашего двигателя. Измеряется в ньютонах на метр или в килограмм-силах на метр. Виды крутящих моментов:
Номинальный – значение момента при стандартном режиме работы и стандартной номинальной нагрузке на двигатель.
Пусковой – это табличное значение. Сила вращения, которую в состоянии развивать электродвигатель при пуске. При подборе эл двигателя убедитесь, что данный параметр выше, чем статический момент Вашего оборудования — насоса, либо вентилятора и т.д. В противном случае электродвигатель не сможет запуститься, что чревато перегревом и перегоранием обмотки.
Максимальный – предельное значение, по достижении которого нагрузка уравновесит двигатель и остановит его.
Определение направления вращения вала электродвигателя
Любой асинхронный электрический двигатель может вращаться по часовой стрелке и против нее. Данные параметры зависят от направления магнитного поля, создаваемого вокруг статора.
Если направление вращения вала электродвигателя не указано и опытное наблюдение невозможно, следует внимательно изучить маркировку на корпусе и схемы соединений, поставляемые производителем.
Следует отметить, монтаж любого электродвигателя должны проводить специалисты с соответствующим опытом и знаниями. Только тогда производитель гарантирует длительную и безопасную работы электромотора.
Направление вращения электродвигателя вы сможете узнать во время проведения монтажа или при периодическом техническом обслуживании, которое рекомендуется проводить систематически.
Покупая электродвигатель, продавец-консультант даст подробную информацию по поводу всех интересующих Вас вопросов и поможет подобрать тот электродвигатель, который будет полностью соответствовать всем заявленным требованиям.
Дата: Воскресенье, 15 Декабрь 2013
Таблица крутящих моментов электродвигателей
В данной таблице собраны крутящие моменты наиболее распространенных в Украине электродвигателей АИР, а также требуемый при пуске – пусковой, максимально допустимый для данного типа электродвигателя – максимальный крутящий момент и момент инерции двигателей АИР (усилие важное при подборе электромагнитного тормоза, например)
Двигатель
кВт/об
Мном, Нм
Мпуск, Нм
Ммакс, Нм
Минн, Нм
АИР56А2
0,18/2730
0,630
1,385
1,385
1,133
АИР56В2
0,25/2700
0,884
1,945
1,945
1,592
АИР56А4
0,12/1350
0,849
1,868
1,868
1,528
АИР56В4
0,18/1350
1,273
2,801
2,801
2,292
АИР63А2
0,37/2730
1,294
2,848
2,848
2,330
АИР63В2
0,55/2730
1,924
4,233
4,233
3,463
АИР63А4
0,25/1320
1,809
3,979
3,979
3,256
АИР63В4
0,37/1320
2,677
5,889
5,889
4,818
АИР63А6
0,18/860
1,999
4,397
4,397
3,198
АИР63В6
0,25/860
2,776
6,108
6,108
4,442
АИР71А2
0,75/2820
2,540
6,604
6,858
4,064
АИР71В2
1,1/2800
3,752
8,254
9,004
6,003
АИР71А4
0,55/1360
3,862
8,883
9,269
6,952
АИР71В4
0,75/1350
5,306
13,264
13,794
12,733
АИР71А6
0,37/900
3,926
8,245
8,637
6,282
АИР71В6
0,55/920
5,709
10,848
12,560
9,135
АИР71В8
0,25/680
3,511
5,618
6,671
4,915
АИР80А2
1,5/2880
4,974
10,943
12,932
8,953
АИР80В2
2,2/2860
7,346
15,427
19,100
13,223
АИР80А4
1,1/1420
7,398
16,275
17,755
12,576
АИР80В4
1,5/1410
10,160
22,351
24,383
17,271
АИР80А6
0,75/920
7,785
16,349
17,128
12,457
АИР80В6
1,1/920
11,418
25,121
26,263
20,553
АИР80А8
0,37/680
5,196
10,393
11,952
7,275
АИР80В8
0,55/680
7,724
15,449
16,221
10,814
АИР90L2
3/2860
10,017
23,040
26,045
17,030
АИР90L4
2,2/1430
14,692
29,385
35,262
29,385
АИР90L6
1,5/940
15,239
30,479
35,051
28,955
АИР90LА8
0,75/700
10,232
15,348
20,464
15,348
АИР90LВ8
1,1/710
14,796
22,194
32,551
22,194
АИР100S2
4/2850
13,404
26,807
32,168
21,446
АИР100L2
5,5/2850
18,430
38,703
44,232
29,488
АИР100S4
3/1410
20,319
40,638
44,702
32,511
АИР100L4
4/1410
27,092
56,894
65,021
43,348
АИР100L6
2,2/940
22,351
42,467
49,172
35,762
АИР100L8
1,5/710
20,176
32,282
40,352
30,264
АИР112М2
7,5/2900
24,698
49,397
54,336
39,517
АИР112М4
5,5/1430
36,731
73,462
91,827
58,769
АИР112МА6
3/950
30,158
60,316
66,347
48,253
АИР112МВ6
4/950
40,211
80,421
88,463
64,337
АИР112МА8
2,2/700
30,014
54,026
66,031
42,020
АИР112МВ8
3/700
40,929
73,671
90,043
57,300
АИР132М2
11/2910
36,100
57,759
79,419
43,320
АИР132S4
7,5/1440
49,740
99,479
124,349
79,583
АИР132М4
11/1450
72,448
173,876
210,100
159,386
АИР132S6
5,5/960
54,714
109,427
120,370
87,542
АИР132М6
7,5/950
75,395
150,789
165,868
120,632
АИР132S8
4/700
54,571
98,229
120,057
76,400
АИР132М8
5,5/700
75,036
135,064
165,079
105,050
АИР160S2
15/2940
48,724
97,449
155,918
2,046
АИР160М2
18,5/2940
60,094
120,187
192,299
2,884
АИР180S2
22/2940
71,463
150,071
250,119
4,288
АИР180М2
30/2940
97,449
214,388
341,071
6,821
АИР200М2
37/2950
119,780
275,493
383,295
16,769
АИР200L2
45/2940
146,173
380,051
584,694
19,003
АИР225М2
55/2955
177,750
408,824
710,998
35,550
АИР250S2
75/2965
241,568
628,078
966,273
84,549
АИР250М2
90/2960
290,372
784,003
1161,486
116,149
АИР280S2
110/2960
354,899
887,247
1171,166
212,939
АИР280М2
132/2964
425,304
1233,381
1488,563
297,713
АИР315S2
160/2977
513,268
1231,844
1693,786
590,259
АИР315М2
200/2978
641,370
1603,425
2116,521
962,055
АИР355SMA2
250/2980
801,174
1281,879
2403,523
2163,171
АИР160S4
15/1460
98,116
186,421
284,538
7,457
АИР160М4
18,5/1460
121,010
229,920
350,930
11,375
АИР180S4
22/1460
143,904
302,199
402,932
15,110
АИР180М2
30/1460
196,233
470,959
588,699
27,276
АИР200М4
37/1460
242,021
532,445
847,072
46,952
АИР200L4
45/1460
294,349
647,568
941,918
66,229
АИР225М4
55/1475
356,102
997,085
1317,576
145,289
АИР250S4
75/1470
487,245
1218,112
1559,184
301,605
АИР250М4
90/1470
584,694
1461,735
1871,020
467,755
АИР280S4
110/1470
714,626
2072,415
2429,728
578,847
АИР280М4
132/1485
848,889
1697,778
2886,222
1612,889
АИР315S4
160/1487
1027,572
2568,931
3802,017
2363,416
АИР315М4
200/1484
1287,062
3217,655
4247,305
3603,774
АИР355SMA4
250/1488
1604,503
3690,356
4492,608
8985,215
АИР355SMВ4
315/1488
2021,673
5054,183
5862,853
12534,375
АИР355SMС4
355/1488
2278,394
5012,466
6151,663
15493,078
АИР160S6
11/970
108,299
205,768
314,067
12,021
АИР160М6
15/970
147,680
339,665
443,041
20,675
АИР180М6
18,5/970
182,139
400,706
546,418
29,324
АИР200М6
22/975
215,487
517,169
711,108
50,209
АИР200L6
30/975
293,846
617,077
881,538
102,846
АИР225М6
37/980
360,561
721,122
1081,684
186,050
АИР250S6
45/986
435,852
784,533
1307,556
440,210
АИР250М6
55/986
532,708
1012,145
1811,207
633,922
АИР280S6
75/985
727,157
1454,315
2326,904
1090,736
АИР280М6
90/985
872,589
1745,178
2792,284
1657,919
АИР315S6
110/987
1064,336
1809,372
2873,708
4044,478
АИР315М6
132/989
1274,621
2166,855
3696,400
5735,794
АИР355МА6
160/993
1538,771
2923,666
3539,174
11848,540
АИР355МВ6
200/993
1923,464
3654,582
4423,968
17118,832
АИР355MLA6
250/993
2404,330
4568,228
5529,960
25485,901
AИР355MLB6
315/992
3032,510
6065,020
7278,024
40029,133
АИР160S8
7,5/730
98,116
156,986
235,479
13,246
АИР160М8
11/730
1007,329
1712,459
2417,589
181,319
АИР180М8
15/730
196,233
333,596
529,829
41,994
АИР200М8
18,5/728
242,685
509,639
606,714
67,952
АИР200L8
22/725
289,793
579,586
724,483
88,966
АИР225М8
30/735
389,796
701,633
1052,449
214,388
АИР250S8
37/738
478,794
861,829
1196,985
481,188
АИР250М8
45/735
584,694
1052,449
1520,204
695,786
АИР280S8
55/735
714,626
1357,789
2143,878
1071,939
АИР280М8
75/735
974,490
1754,082
2728,571
1851,531
АИР315S8
90/740
1161,486
1509,932
2671,419
4413,649
АИР315М8
110/742
1415,768
2265,229
3964,151
6370,957
АИР355SMA8
132/743
1696,635
2714,616
3902,261
12215,774
AИР355SMB8
160/743
2056,528
3496,097
4935,666
18097,443
AИР355MLA8
200/743
2570,659
4627,187
6940,781
26991,925
AИР355MLB8
250/743
4498,654
7647,712
10796,770
58032,638
Расчет крутящего момента – формула
Примечание: при расчете стоит учесть коэффициент проскальзывания асинхронного двигателя. Номинальное количество оборотов двигателя не совпадает с реальным. Точное количество оборотов вы сможете найти, зная маркировку, в таблице выше.
Расчет онлайн
Для расчета крутящего момента электродвигателя онлайн введите значение мощности ЭД и реальную угловую скорость (количество оборотов в минуту)
тут будет калькулятор
После расчета крутящего момента, посмотрите схемы подключения асинхронных электродвигателей звездой и треугольником на сайте «Слобожанского завода»
Источник
Мощность электродвигателя: формула, правила расчета, виды и классификация электродвигателей
В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.
Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Преимущества и недостатки
К достоинствам относится:
Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
Легко регулируемая частота вращения;
хорошие пусковые характеристики;
компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
ограниченный ресурс коллектора и щёток;
дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Конструкция электрического двигателя
Привод включает в себя:
Ротор.
Статор.
Подшипники.
Воздушный зазор.
Обмотку.
Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
Зависимость момента от частоты вращения двигателя постоянного тока
§ 115. Характеристики двигателей постоянного тока
Рабочие свойства двигателей определяются их рабочими характеристиками, представляющими собой зависимости числа оборотов n
, вращающего момента М э, потребляемого тока I 1, мощности P 1 и к. п. д. η от полезной мощности на валу Р 2, т. е.
Эти зависимости соответствуют естественным условиям работы двигателя, т. е. машина не регулируется и напряжение сети остается постоянным. Так как при изменении полезной мощности Р
2 (т. е. нагрузки на валу) изменяется также и ток в якоре машины, то рабочие характеристики часто строятся в зависимости от тока в якоре. Мы рассмотрим зависимость вращающего момента и скорости вращения от тока в якоре для двигателей с различным возбуждением. Характеристики двигателя параллельного возбуждения изображены на рис. 164, а схема его показана выше (см. рис. 163).
Число оборотов двигателя определяется следующим выражением:
С увеличением нагрузки на валу двигателя повышается также и ток в якоре. Это вызывает увеличение падения напряжения в сопротивлении обмотки якоря и щеточных контактах (I
я r я). Как ток возбуждения, так и магнитный поток остаются неизменными. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Φ несколько уменьшится. Увеличение I я r я вызывает уменьшение скорости двигателя, а уменьшение Φ увеличивает его скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику. Вращающий момент двигателя равен:
М
э = k Φ I я. (151)
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
Схема двигателя последовательного возбуждения показана на рис. 165. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 166.
Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
где r
c — сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падение напряжения в сопротивлении якоря и обмотки возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (I
я ≈ 0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос. Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимально допустимую нагрузку, составляющую 25 — 30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому в случаях, когда возможны сбросы или резкие уменьшения нагрузок, использовать двигатели последовательного возбуждения нельзя. В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут являться для него достаточно большой механической нагрузкой. Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Φ = с′ I я), можно определить следующим выражением:
М
э = k Φ I я = k ′ I 2 я, (153)
где с
′ и k′ — некоторые постоянные величины; k′ = k · c′, т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и при перегрузках. Эти двигатели широко используются в транспортных и подъемных устройствах. При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения. Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво. Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения. С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем в двигателях параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет в разнос, так как магнитный поток не уменьшается до нуля в результате наличия параллельной обмотки возбуждения. При увеличении нагрузки в двигателях смешанного возбуждения происходит увеличение магнитного потока и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей степени, чем в двигателях последовательного возбуждения.
Источник
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
n пр = n обр = f 1 × 60 ÷ p = n 1
n пр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
n обр — число оборотов поля в обратном направлении, об/мин;
f 1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n 1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Регулирование частоты вращения двигателя постоянного тока независимого возбуждения ДПТ НВ
Способы регулирования частоты вращения двигателей оцениваются следующими показателями: плавностью регулирования; диапазоном регулирования, определяемым отношением наибольшей частоты вращения к наименьшей; экономичностью регулирования, определяемой стоимостью регулирующей аппаратуры и потерями электроэнергии в ней.
Из (29.5) следует, что регулировать частоту вращения двигателя независимого возбуждения можно изменением сопротивления в цепи якоря, изменением основного магнитного потока Ф
, изменением напряжения в цепи якоря.
График мощности и крутящего момента — о чем он говорит?
Пример графика мощности и крутящего момента, полученный со стенда для испытания двигателей PowerTest.
Где
ω — угловая скорость вращения вала
M — крутящий момент
π — число
3.1416
n — частота вращения, измеряемая в оборотах в единицу времени (в данном случае одна минута).
Важно отметить что мощность в этой формуле получается в ваттах, для получения результата в лошадиных силах мощность в кВт необходимо умножить на коэффициент 0,735499.
КРУТЯЩИЙ МОМЕНТ (TORQUE)
— это произведение силы в Н, которая приложена к валу не напрямую, а через рычаг (плечо) длиной 1 м, прикрепленный к валу (точка измерения крутящего момента), отсюда и единица измерения Н*м. При такой нагрузке происходит деформация вала ,только не изгиб, который был бы при нулевой длине плеча, а скручивание, при котором отдельные сечения вала не повторяют друг друга, а оказываются повернутыми друг относительно друга на определённые углы, тем большие, чем больше приложенная сила, или чем больше рычаг при одной и той же силе. По этой причине момент называют крутящим. Не следует ожидать, что вы увидите эту закрутку стального вала диаметром, например, 20 мм, нанеся перед нагрузкой на поверхность вала линии, параллельные его оси. Величина закрутки будет в реальности настолько мала, что её непросто измерить даже с помощью специальных приборов, измерителей крутящего момента.
ОБОРОТЫ (RPM — Revolutions Per Minute)
— здесь все еще проще, это число оборотов, которое совершает ВАЛ за одну минуту. Измеряется в об/мин.
Часто кажется, что люди не вполне понимают разницу между МОЩНОСТЬЮ и МОМЕНТОМ, тем более, последние связаны друг с другом через еще один ключевой параметр, как на стенде испытаний двигателя, так и в условиях реальной эксплуатации. Это угловая скорость вращения вала.
Например к нам часто приходят запросы «Нам нужно измерить параметры двигателя мощностью 200л.с.» или «какой гидротормоз вы посоветуете на 140 кВт?»
Ответить на этот вопрос можно, но это не гарантирует что заказчик получит желаемый результат. Потому что в вопросе отсутствует информация о скоростных режимах испытываемого на стенде двигателя.
Уравнения состояния и структурная схема асинхронного электродвигателя
Систему уравнений АД представим записанной в форме Коши, одновременно заменяя токи обмоток через функции потокосцеплений.
Или, подставляя выражения для токов, получаем:
Подставляем полученные значения токов и момента в уравнения и, обозначая D1 = L
1 L 2— L 2 m , получаем:
Последние уравнения можно рассматривать как уравнения состояния АД. В качестве переменных состояния здесь выступают проекции потокосцеплений на ортогональные оси и угловая частота вращения ротора. Внешними воздействиями на двигатель являются напряжения статора и момент сил сопротивления.
Эти уравнения нелинейны (содержат произведения переменных состояния) и решения в общем виде не имеют. Переходные процессы АД обычно исследуют моделированием на ЭВМ.
Почему это важно?
При выборе нагружающего устройства это критически важно, так как одну и ту же мощность двигатель может выдавать на стенде как при 1500 об/мин (дизельный двигатель), так и на 20 000 об/мин (двигатель гоночного мотоцикла). Для каждого типа двигателя необходимо подбирать соответствующее нагружающее устройство. А иногда даже не одно, а тандем из двух, первое из которых работает при низких оборотах, а второе при высоких. Если речь идет об испытаниях вновь создаваемых двигателей с широким скоростным диапазоном вращения вала.
Что это означает на практике?
Если отойти от теории, то график мощности и крутящего момента — это основные характеристики двигателя. Когда вы въезжаете на своем автомобиле в горку и пытаетесь поддерживать одну и ту же скорость, вам приходится сильнее нажимать на педаль газа. Многим при этом кажется, что мощность останется та же, т.к. скорость не меняется. Но это не так!
При движении в горку двигатель выдает большую мощность при тех же оборотах. (при неизменной передаче). Это легко проверить, взглянув на текущий расход топлива.
Также это объясняет, зачем двигателю нужна коробка передач, ведь для эффективного разгона и преодоления подъёмов нам необходимо поддерживать обороты в диапазоне максимальной мощности двигателя.
А вот электромобили обходятся без нее. Кривая крутящего момента и мощности у электродвигателя намного более линейна, и к тому же электродвигатель выдает куда большую мощность на низких оборотах.
Какому двигателю отдать предпочтение?
В настоящий момент к привычным ДВС на дизельном топливе или бензине добавились еще и электродвигатели. Во всех этих конструкциях крутящий момент двигателя может кардинально отличаться.
Бензиновый двигатель
Действие основано на впрыске и формировании воздушно-топливной смеси с последующим возгоранием от искры свечей зажигания. Процесс происходит при температуре в 500 градусов, а коэффициент сжатия находится в районе 10 единиц.
Дизельный двигатель
Здесь коэффициент сжатия достигает уже 25 единиц, а температура составляет 900 градусов. При таких условиях смесь воспламеняется без необходимости в использовании свечей.
Электродвигатель
Пожалуй, самый простой и прогрессивный вариант, который лучше вообще исключить из списка. Дело в том, что трехфазный асинхронный двигатель работает по другому принципу, кардинально отличающемуся от традиционных ДВС. Здесь пикового КМ в 600 Нм можно достичь на любой скорости. Если же говорить о «лошадях», у Теслы их количество составит 416.
Но пока электрокары не получили повсеместного распространения. И если этот вариант по каким-либо причинам недоступен, рассмотрим особенности бензиновых и дизельных агрегатов. При одинаковых объемах первый способен давать высокую скорость, второй – быстрый разгон.
Мощность электродвигателя расчет и классификация
Электродвигатели, устанавливаемые в оборудование, особенно производственное, важно грамотно подбирать по ряду критериев. Одним из основных технических параметров, которые важно учитывать при подборе, является мощность двигателя..
Грамотный подбор позволит значительно продлить срок эксплуатации электроприбора, что в случае с использованием дорогостоящего оборудования будет означать еще и существенную экономию..
Электродвигатели
Задача электродвигателя заключается в том, чтобы преобразовывать энергию поступающего электрического тока в механическую энергию. В основе данного процесса лежит известный принцип электромагнитной индукции. Двигатель может работать от переменного или постоянного тока, поступающего от инвертора, аккумулятора или сети..
Стоит также отметить, что на электростанциях двигатели совершают обратный процесс – преобразуют механическую энергию (например, энергию падающей воды) в электрическую.
Можно выделить две большие группы электромоторов: работающие на переменном токе и на постоянном. Вторые, в свою очередь, подразделяются на бесколлекторные и коллекторные, первые – на асинхронные и синхронные.
Моторы переменного тока также делятся на однофазные, двухфазные и трехфазные. В отдельную категорию выделяются двигатели с жидкостным (вода) и воздушным типами охлаждения.
Как рассчитать мощность двигателя, который работает на переменном токе? Для расчета используется следующая формула:
Конструкция электродвигателя
Основные элементы конструкции следующие::
Ротор.
Статор.
Подшипники.
Воздушный зазор.
Обмотку.
Коммутатор.
Рассмотрим их подробнее..
Ротор представляет собой единственный подвижный элемент двигателя. При работе мотора ротор вращается вокруг оси. При этом ток, проходящий через проводники, создает в обмотках двигателя индукционные возмущения. Таким образом создается магнитное поле. Взаимодействуя со статором, в котором имеются магниты, это поле заставляет вращаться вал. .
Подшипники – деталь, устанавливаемая на вал. Именно на них вал вращается.
Статор – неподвижный элемент конструкции двигателя. Статор, в свою очередь, может включать в себя разные составляющие, в зависимости от типа мотора. Это может быть обмотка или постоянный магнит. Ключевая деталь статора – это набор тонких пластинок металла, которые образуют так называемый пакет якоря. Он используется для снижения энергетических потерь.
Обмотка, по сути, представляет собой катушку с медной проволокой, расположенную вокруг сердечника. Сердечник выполняется из металла и является намагниченным. Задача катушки заключается в том, чтобы преобразовывать одно значение напряжения в другое. Электрический ток, проходя через обмотку, создает индукционные возмущения. Вследствие этого мотор переходит в режим полюсности, имеющий явные и неявные полюса
Можно выделить несколько разных видов обмотки. Наиболее популярная из них – так называемая винтовая. Кроме того, различают слоевую обмотку, чередующуюся, дисковую катушечную.
Воздушный зазор – это расстояние между статором и ротором. Чем зазор больше, тем ток намагничивания выше. Вследствие этого оптимальным для хорошей работы мотора является небольшой зазор, поскольку он напрямую влияет на КПД двигателя – на потери, на вращающий момент. Чересчур малый зазор, однако, приводит к появлению трения и к ослаблению фиксаторов
Различные виды двигателей имеют разные зазоры. Конкретная величина зазора определяется рядом факторов, таких как габариты мотора, рабочая температура, нагрузки и т.д.
Коммутатор представляет собой набор изолированных колец, которые располагаются на валу двигателя. Основная задача коммутатора заключается в том, чтобы переключать напряжение на входе. Можно выделить два класса коммутаторов: транзисторные и тиристорные..
Принцип действия
Согласно закону Архимеда, ток в проводниках создается магнитным полем, в котором действует сила. В том случае, если взять такой проводник и сделать из него рамку, а затем расположить ее в магнитном поле под прямым углом, то края этой рамки будут испытывать на себе силы, векторы которых будут расположены по отношению друг к другу в противоположных направлениях. Эти силы и формируют крутящий момент, а он, в свою очередь, вращает ось..
Магнитное поле формируется магнитами – постоянными или электрическими. Наличие витков на якоре гарантирует постоянное вращение. В итоге ток создает индукционное поле, которое и формирует электродвижущую силу.
Индукционный (асинхронный) двигатель требует постоянного источника переменного тока. Ток в таком моторе, осуществляя взаимодействие с магнитным полем, вращает ротор. Если на катушке мотора нет напряжения, то двигатель неподвижен. Но стоит появиться току – тут же формируется магнитное поле, которое можно описать такой формулой:
Магнитное поле формирует пульсацию, которая заставляет ротор вращаться вокруг оси. В катушке устройства создается ток, его частота зависит от вращения ротора. Как только ток вступает во взаимодействие с магнитным полем, вал мотора начинает вращаться
Есть три основные формулы расчета мощности асинхронных двигателей. Для расчета по сдвигу фаз применяют следующую:
Типы электродвигателей
Все двигатели можно разбить на два больших класса: работающие на переменном токе и на постоянном. По параметру «принцип работы» классификация следующая
Коллекторные.
Вентильные.
Асинхронные.
Синхронные.
Следует уточнить, что вентильные двигатели – не самостоятельный класс, а вариация коллекторного типа мотора. В конструкцию такого двигателя включен датчик положения ротора и электронный преобразователь. Как правило, эти элементы монтируют на плате управления. Благодаря им становится возможной согласованная коммутация якоря.
Моторы синхронного и асинхронного типов работают только на переменном токе. Наличие сложной электроники позволяет управлять оборотами такого двигателя.
Асинхронные моторы, в свою очередь, подразделяются на одно–, двух– и трехфазные. Расчет мощности трехфазного мотора (в случае соединения по типу звезды или в треугольник): :
Если значения тока и напряжения линейны, то формула изменяется:
Синхронные двигатели можно разделить на несколько больших категорий
Шаговые.
Гибридные.
Индукторные.
Гистерезисные.
Реактивные.
Шаговый мотор имеет в конструкции постоянный магнит. Эти двигатели не принято выносить в самостоятельный отдельный подкласс. Управление ими ведется при помощи специальных частотных преобразователей.
Также можно выделить универсальные моторы, которые могут работать и на переменном токе, и на постоянном.
Формулы и уравнения линейных и асинхронных двигателей
Следующие уравнения и формулы, относящиеся к линейным и асинхронным двигателям, можно использовать для расчета основных параметров при анализе и проектировании однофазного и трехфазного асинхронного двигателя.
Содержание
Формула и уравнения для асинхронного двигателя:
ЭДС индукции:
e инд = vB л
12
, где
e ind = ЭДС индукции
v = скорость ротора
B = плотность магнитного потока
l = длина проводников внутри магнитного поля
Ток ротора:
Ток ротора определяется по формуле:
Создаваемый крутящий момент:
Термины, используемые в уравнениях и формулах крутящего момента двигателя.
N с = Синхронная скорость
s = скольжение двигателя
s b = пробойная или выдвижная накладка
E 1 = напряжение статора или входное напряжение
E 2 = ЭДС ротора на фазу в состоянии покоя
R 2 = сопротивление ротора на фазу
X 2 = реактивное сопротивление ротора на фазу
В = напряжение питания
К = соотношение оборотов ротора/статора на фазу
Пусковой момент
Максимальный пусковой момент Условие
R 2 = X 2
Отношение пускового момента к напряжению питания
T ст α V 2
Крутящий момент в рабочем состоянии
Полный крутящий момент
Условия максимального рабочего крутящего момента
R 2 = sX 2
Максимальный рабочий крутящий момент
Накладка аварийная
Отношение крутящего момента к максимальному крутящему моменту
Скорость скольжения и скольжение асинхронного двигателя:
Скорость скольжения представляет собой разницу между синхронной скоростью и скоростью вращения ротора;
N скольжение = N с – N (скорость в об/мин)
ω скольжение = ω с – ω (Угловая скорость в Рад/с)
Где
N скольжение = скорость скольжения
N с = Синхронная скорость = 120f/P
N = скорость вращения двигателя
Скольжение асинхронного двигателя является относительным показателем, выраженным в процентах. Это дано:
Где
S — скольжение асинхронного двигателя
Скорость ротора :
Скорость ротора асинхронного двигателя определяется как
N = (1-с)N
ω = (1-с) ω с (угловая скорость в рад/с)
Электрическая частота ротора:
Где
f r = частота ротора
f = Частота линии
P = Количество полюсов
Мощность асинхронного двигателя:
Связанные термины, используемые в формулах и уравнениях мощности двигателя.
P 1 = входная мощность статора
P 2 = Входная мощность ротора
P м = Полная выходная мощность ротора
P вых = выходная мощность
Т г = полный крутящий момент
T ш = крутящий момент на валу
Входная мощность ротора:
P 2 = T г ω с
Полная выходная мощность ротора:
2
P м = T г ω
Выходная мощность:
P вых = T ш ω
P1 = P2 + потери в статоре = P м + потери в меди ротора = P OUT + Потери намонтаж и трения
Вход ротор Вход: выходной механический потеря
Синхронный Ватт:
Крутящий момент, при котором машина на синхронной скорости будет генерировать один ватт;
КПД асинхронного двигателя:
Эффективность ротора:
Общая эффективность
Формула и уравнения для линейного асинхронного двигателя:
Синхронная скорость:
Где
В с 90 = линейная 8 синхронная скорость 8
w = ширина одного шага полюсов
f = частота сети
Слип:
Где
v с = линейная синхронная скорость
v = Фактическая скорость
тяга или сила :
, где
P 2 = Входная мощность ротора
. :
Преобразование формул и уравнений
Основные формулы и уравнения электротехники
Формулы основных электрических величин
Формулы мощности в однофазных и трехфазных цепях постоянного и переменного тока
Формулы и уравнения в области электротехники и электроники
Символы электродвигателей
Показать полную статью
Связанные статьи
Кнопка «Вернуться к началу»
Motor Formulas and Calculations, Index of Helping Tools
Это новое всплывающее окно поверх окна браузера GeneratorJoe. НАЖМИТЕ, ЧТОБЫ ЗАКРЫТЬ ОКНО
Приведенные ниже формулы и расчеты следует использовать только для целей оценки. Заказчик несет ответственность за указание требуемой мощности двигателя, крутящего момента и времени разгона для своего применения. Продавец может пожелать проверить значения, указанные клиентом, с помощью формул в этом разделе, однако, если есть серьезные сомнения относительно применения клиента или если клиенту требуется гарантированная производительность двигателя/приложения, клиент должен привлечь инженера-электрика для точной проверки. расчеты.
Чтобы получить подробное объяснение каждой формулы, нажмите на ссылки ниже, чтобы перейти прямо к ней.
Практические правила (приблизительные)
При 1800 об/мин двигатель развивает 3 фунт-фута. на л.с. При 1200 об/мин двигатель развивает 4,5 фунт-фута. на л.с. При 575 В трехфазный двигатель потребляет 1 А на л.с. При 460 В трехфазный двигатель потребляет 1,25 А на л.с. При 230 В трехфазный двигатель потребляет 2,5 А на л.с. При 230 В , однофазный двигатель потребляет 5 ампер на л.с. При напряжении 115 В однофазный двигатель потребляет 10 А на л.с.
Механические формулы =
л.с. x 5250
об / мин
——
л. с. =
Крутящий момент x rpm
——
RPM =
——
RPM =
——
RPM =
——
RPM.
5250
Преобразование температуры
Градус C = (Градус F — 32) x 5/9
Градус F = (Градус C x 9/5) + 32
Формула преобразования температуры 0,6 . K = 5 / 9 (R-0,6) F = 1,8C + 32
C = 5 / 9 (F-32) R = F + 46043043. . K = C + 273
C = градусы Цельсия, F = градусы Фаренгейта, .K = Кельвин R = Rankine, degrees
to C
Temp.
to F
-17.8 10.8 37.8 65.6 93.3
0 50 100 150 200
32. 0 122.0 212.0 302.0 392.0
121.0 148.9 176.7 204.4 232.2
250 300 350 400 450
482.0 572.0 662.0 752.0 842.0
260.0 287.7 315.6 343.3
500 550 600 650
932.0 1022.0 1112.0 1202.0
до C
до C
9867 до C
.
to F
371. 1 398.9 426.7 454.4 482.2
700 750 800 850 900
1292.0 1382.0 1472.0 1562.0 1652.0
510.0 537.8 565.6 593.3 621.1
950 1000 1050 1100 1150
1742.0 1832.0 1922.0 2012.0 2102.0
648.9 676.7 704.4 732.2
1200 1250 1300 1350
2192.0 2282.0 2372.0 2462.0
to C
Temp.
to F
760. 0 787.8 815.6 843.3 872.1
1400 1450 1500 1550 1600
2552.0 2642.0 2732.0 2822.0 2912.0
899.9 927.7 955.4 983.2 1011.0
1650 1700 1750 1800 1850
3002.0 3092.0 3182.0 3272.0 3362.0
1038.8 1066.6 1094.3 1121.1
1900 1950 2000 2050
3452.0 3542.0 3632.0 3722.0
Высокоинерционные нагрузки
t =
WK 2 x об/мин
308 x T ср.
——
WK 2 = инерция в lb.ft. 2 t = время разгона в сек. Т = Ср. ускоряющий крутящий момент lb.ft.
T =
WK 2 x rpm
308 x t
inertia reflected to motor = Load Inertia
Load rpm
Мотор RPM
2
-Синхронная скорость, частота и количество полюсов AC Motors
N S = 4
N S = 4
N S = 4
N S 9017 =
N S 9017 =
N S 9017 =
N . f =
P x n s
120
——
P =
120 x f
n s
Relation Between Horsepower, Torque, And Speed
HP =
T x n
5250
——
T =
5250 HP
n
——
n =
5250 HP
T
Motor Slip
% Slip =
n s — n
n s
x 100
Code
kVA/HP
Код
kVA/HP
Code
kVA/HP
Code
kVA/HP
A
0-3. 14
F
5.0 -5.59
L
9.0-9.99
S
16.0-17.99
B
3.15-3.54
G
5.6 -6.29
M
10.0-11.19
T
18. 0-19.99
C
3.55-3.99
H
6.3 -7.09
N
11.2-12.49
U
20.0-22.39
D
4.0 -4.49
I
7.1 -7.99
P
12.5-13.99
V
22. 4 & Up
E
4.5 -4.99
K
8.0 -8.99
R
14.0-15.99
Symbols
I
=
current in amperes
E
=
voltage in volts
kW
=
power in kilowatts
kVA
=
apparent power in kilo-volt-amperes
HP
=
output power in horsepower
n
=
скорость двигателя в оборотах в минуту (об/мин)
нс
=
синхронная скорость в оборотах в минуту (об/мин)
3 P
6 =
number of poles
f
=
frequency in cycles per second (CPS)
T
=
torque in pound-feet
EFF
=
КПД в десятичной форме
PF
=
Коэффициент мощности в десятичной форме
Эквивалентная инерция
В механических системах все вращающиеся части обычно не работают с одинаковой скоростью. Таким образом, нам необходимо определить «эквивалентную инерцию» каждой движущейся части при определенной скорости первичного двигателя.
Общий эквивалент WK 2 для системы представляет собой сумму WK 2 каждой части относительно скорости первичного двигателя.
The equation says:
WK 2 EQ = WK 2 part
N part
N prime mover
2
Это уравнение становится общим знаменателем, на котором могут основываться другие расчеты. Для устройств с регулируемой скоростью инерция должна сначала рассчитываться на низкой скорости.
Давайте рассмотрим простую систему, состоящую из первичного двигателя (ПМ), редуктора и нагрузки.
WK 2 = 100 lb.ft. 2
WK 2 = 900 lb.ft. 2 (вид на выходной вал)
WK 2 = 27 000 lb.ft. 2
ПРИВОД
РЕДУКТОР 3:1
The formula states that the system WK 2 equivalent is equal to the sum of WK 2 parts at the prime mover’s RPM, or in this case:
WK 2 EQ = WK 2 pm + WK 2 Красный.
Красный.
P M РПМ
2
+ WK 2 Load
Load RPM
PM RPM
2
Note: reducer RPM = Load RPM
WK 2 EQ = WK 2 pm + WK 2 Красный.
1
3
2
+ WK 2 Нагрузка
1
3
3
Эквивалент WK 2 равен WK 2 первичного двигателя плюс WK 2 нагрузки. Это равно WK 2 первичного двигателя, плюс WK 2 редуктора, умноженное на (1/3) 2 , плюс WK 2 , умноженное на нагрузку (1/3) 2 .
Это отношение редуктора к ведомой нагрузке выражается приведенной выше формулой:
WK 2 EQ = WK 2 part
N part
N prime mover
2
In other Другими словами, когда деталь вращается со скоростью (N), отличной от скорости первичного двигателя, WK 2 EQ равно WK 2 отношения скорости детали, возведенного в квадрат.
В примере результат может быть получен следующим образом:
Суммарный эквивалент WK 2 равен тому WK 2 , который видит первичный двигатель на его скорости.
Электрические формулы (Дополнительные формулы см. в разделе «Формулы»)
Найти
Переменный ток
Single-Phase
Three-Phase
Amperes when horsepower is known
HP x 746
E x Eff x pf
HP x 746
1. 73 x E x Eff x pf
Ампер, когда киловатт известны
кВт x 1000
E X PF
KW x 1000
1,73 x E X PF
AMPER, когда whva известен
.
1.73 x E
Kilowatts
I x E x pf
1000
1.73 x I x E x pf
1000
kVA
I x E
1000
1. 73 x I x E
1000
Horsepower = (Output)
I x E x Eff x pf
746
1.73 x I x E x Eff x pff
746
I = Amperes; Е = вольт; Эфф = Эффективность; pf = коэффициент мощности; кВА = киловольт-ампер; кВт = киловатты
Locked Rotor Current (IL) From Nameplate Data
Three Phase: I L =
577 x HP x kVA/HP
E
See: kVA/HP Chart
Single Phase: I L =
1000 x HP x kVA/HP
E
EXAMPLE:
Motor nameplate indicates 10 HP , 3 фазы, 460 вольт, код F.
I L =
577 x 10 x (5.6 or 6.29)
460
I L =
70.25 or 78.9 Amperes (possible range)
Effect Of Line Voltage On Locked Rotor Current (IL) (Approx.)
I L @ E LINE = I L @ E N/P x
E LINE
Е Н/П
Пример:
Motor Crottor (in -in 100487
. ) 230 В.
Что такое I L при напряжении 245 В (E LINE ), применяемом к этому двигателю? = 107 Ампер
Основные расчеты лошадиных сил
Лошадиная сила — это работа, выполняемая в единицу времени. Один HP равен 33 000 ft-lb работы в минуту. Когда источник крутящего момента (T) совершает работу для создания (M) оборотов вокруг оси, выполненная работа равна:
радиус x 2 x об/мин x фунт или 2 TM
При вращении со скоростью N об/мин, выдаваемая мощность составляет:
HP =
radius x 2 x rpm x lb.
33,000
=
TN
5,250
For vertical or hoisting motion:
HP =
W x S
33,000 x E
Where:
W
=
total weight in lbs. поднимается мотором
S
=
скорость подъема в футах в минуту
E
=
общий механический к. Для оценки
E
=
0,65 для эфф. подъемника и присоединенного механизма.
для вентиляторов и воздуходувок:
HP =
HP =
HP =
HP =
. 0043 6356 x Mechanical Efficiency of Fan
Or
HP =
Volume (cfm) x Pressure (lb. Per sq. ft.)
3300 x Механическая эффективность вентилятора
или
HP =
9069).x Механический КПД вентилятора
Для оценки эффективности. вентилятора или воздуходувки можно принять равным 0,65.
Примечание:
Производительность по воздуху (куб. фут/мин) напрямую зависит от скорости вращения вентилятора. Развиваемое давление зависит от квадрата скорости вращения вентилятора. Мощность зависит от куба скорости вращения вентилятора.
Для насосов:
л.с. =
галлонов в минуту x давление в фунтах на кв. дюйм x удельный вес0043 1713 x Mechanical Efficiency of Pump
Or
HP =
GPM x Total Dynamic Head in Feet x Specific Gravity
3960 x Mechanical Efficiency of Pump
где общее напорное статическое трение + динамическое0493
Для оценки можно принять КПД насоса равным 0,70.
Ускоряющий момент
Эквивалентная инерция привода с регулируемой скоростью показывает энергию, необходимую для поддержания работы системы. Однако запуск или ускорение системы требует дополнительной энергии.
Крутящий момент, необходимый для ускорения тела, равен WK 2 тела, умноженному на изменение числа оборотов в минуту, деленному на 308-кратный интервал (в секундах), в течение которого происходит это ускорение:
ACCELERATING TORQUE =
WK 2 N (in lb.ft.)
308t
Where:
Н
=
Изменение в об/мин
Вт
=
Вес в фунтах.
К
=
Радиус вращения
t
=
Time of acceleration (secs.)
WK 2
=
Equivalent Inertia
308
=
Constant of proportionality
Or
T Acc =
WK 2 N
308t
Постоянная (308) получается путем преобразования линейного движения в угловое и с учетом ускорения под действием силы тяжести. If, for example, we have simply a prime mover and a load with no speed adjustment:
Example 1
PRIME LOADER
WK 2 = 200 фунтов на фут 2
WK 2 = 800 lb.ft. 2
The WK 2 EQ is determined as before:
WK 2 EQ = WK 2 pm + WK 2 Нагрузка
WK 2 EQ = 200 + 800
WK 2 EQ
7 = . ft. 2
Если мы хотим разогнать эту нагрузку до 1800 об/мин за 1 минуту, имеется достаточно информации, чтобы найти величину крутящего момента, необходимого для ускорения нагрузки.
The formula states:
T Acc =
WK 2 EQ N
308t
or
1000 x 1800
308 x 60
OR
1800000
18480
989
989
989
.
Другими словами, 97,4 фунт-фута. необходимо приложить крутящий момент, чтобы заставить эту нагрузку вращаться со скоростью 1800 об/мин за 60 секунд.
Обратите внимание, что T Acc представляет собой среднее значение ускоряющего момента при рассматриваемом изменении скорости. Если требуется более точный расчет, может оказаться полезным следующий пример.
Пример 2
Время, необходимое для разгона асинхронного двигателя с одной скорости до другой, можно найти из следующего уравнения:
t =
WR 2 x change in rpm
308 x T
Where:
T
=
Среднее значение ускоряющего момента при рассматриваемом изменении скорости.
t
=
Время, необходимое двигателю для разгона от начальной до конечной скорости.
WR 2
=
Эффект маховика или момент инерции для приводимого оборудования плюс ротор двигателя в фунтах-футах. 2 (WR 2 приводимого механизма должен относиться к валу двигателя).
Теперь рассмотрим применение вышеприведенной формулы на примере. На рисунке А показаны кривые скорость-момент асинхронного двигателя с короткозамкнутым ротором и вентилятора, который он приводит в действие. При любой скорости вентилятора разница между крутящим моментом, который двигатель может передать на своем валу, и крутящим моментом, требуемым для вентилятора, представляет собой крутящий момент, доступный для ускорения. Ссылка на рисунок А показывает, что ускоряющий момент может сильно меняться в зависимости от скорости. Когда кривые скорость-момент для двигателя и воздуходувки пересекаются, крутящий момент для ускорения отсутствует. Затем двигатель приводит в действие воздуходувку с постоянной скоростью и просто обеспечивает крутящий момент, необходимый для нагрузки.
Чтобы найти общее время, необходимое для разгона двигателя и вентилятора, область между кривой скорости вращения двигателя и кривой скорости вращения вентилятора разделена на полосы, концы которых приближаются к прямым линиям. Каждая полоса соответствует приращению скорости, происходящему в течение определенного интервала времени. Сплошные горизонтальные линии на рисунке А обозначают границы полос; длины пунктирных линий — средние ускоряющие моменты для выбранных интервалов скоростей. Чтобы рассчитать общее время разгона двигателя и воздуходувки с прямой связью, необходимо найти время, необходимое для разгона двигателя от начала одного интервала скорости до начала следующего интервала, и сложить время приращения для все интервалы, чтобы прийти к общему времени ускорения. Если WR 2 двигателя, кривая скорости вращения которого приведена на рисунке A, составляет 3,26 футо-фунта. 2 и WR 2 вентилятора относительно вала двигателя составляет 15 футо-фунтов. 2 , общее количество WR 2 равно:
15 + 3,26 = 18,26 ft.lb. 2 ,
А общее время разгона:0129
308
rpm 1
T 1
+
rpm 2
T 2
+
rpm 3
T 3
+ — — — — — — — — — +
rpm 9
T 9
Or
t =
18. 26
308
150
46
+
150
48
+
300
47
+
300
43.8
+
200
39.8
+
200
36.4
+
300
32.8
+
100
29.6
+
40
11
t = 2,75 сек.
Figure A Curves used to determine time required to accelerate induction motor and blower
Accelerating Torques
T 1 = 46 lb.ft.
T 4 = 43,8 фунт-фут.
T 7 = 32,8 фунт-фут.
T 2 = 48 lb.ft.
T 5 = 39,8 фунт-фут.
T 8 = 29,6 фунт-фут.
T 3 = 47 lb.ft.
T 6 = 36,4 фунт-фут.
T 9 = 11 фунто-футов.
Рабочие циклы
Заказы на продажу часто вводятся с пометкой под специальными функциями, такими как: -«Подходит для 3 реверсов в минуту» или —— «Двигатель, способный развивать скорость до 350 фунт-футов» не может быть обработан по двум причинам.
Сначала необходимо проконсультироваться с соответствующей группой продуктов, чтобы узнать, доступна ли конструкция, которая будет выполнять требуемый рабочий цикл, и, если нет, определить, относится ли требуемый тип конструкции к нашей существующей линейке продуктов.
Ни одно из приведенных выше примечаний не содержит достаточно информации для выполнения необходимого расчета рабочего цикла. Для проверки рабочего цикла информация о рабочем цикле должна включать следующее:
Инерция отражается на валу двигателя.
Моментная нагрузка на двигатель во время всех частей рабочего цикла, включая пуски, время работы, остановки или реверсы.
Точная синхронизация каждой части цикла.
Информация о том, как выполняется каждый шаг цикла. Например, остановка может осуществляться выбегом, механическим торможением, динамическим торможением постоянным током или торможением. Реверс может быть выполнен заглушкой или двигатель может быть остановлен каким-либо образом, а затем снова запущен в противоположном направлении.
Если двигатель многоскоростной, цикл для каждой скорости должен быть полностью определен, включая метод переключения с одной скорости на другую.
Любые особые механические проблемы, особенности или ограничения.
Получение этой информации и сверка с группой продуктов перед размещением заказа может сэкономить много времени, средств и корреспонденции.
Рабочий цикл относится к подробному описанию рабочего цикла, который повторяется в течение определенного периода времени. Этот цикл может включать в себя частые пуски, остановку забивания, реверсирование или остановку. Эти характеристики обычно используются в процессах периодического действия и могут включать галтовочные барабаны, некоторые краны, лопаты и драглайны, демпферы, приводы ворот или отвалов, подъемные мосты, грузовые и людские лифты, экстракторы прессового типа, некоторые питатели, прессы определенные типы, подъемники, индексаторы, расточные машины, машины для производства шлакоблоков, шпоночные, месильные, вагонотяговые, встряхивающие (литейные или автомобильные), обжимные и моечные машины, а также некоторые грузовые и пассажирские транспортные средства. Список не является исчерпывающим. Приводы для этих нагрузок должны быть способны поглощать тепло, выделяемое во время рабочих циклов. В муфтах скольжения, муфтах или двигателях потребуется достаточная теплоемкость для ускорения или остановки этих приводов или для предотвращения опрокидывания. Это произведение скорости скольжения и крутящего момента, поглощаемого нагрузкой в единицу времени, что приводит к выделению тепла в этих компонентах привода. Все события, происходящие во время рабочего цикла, генерируют тепло, которое компоненты привода должны рассеивать.
Из-за сложности расчетов рабочего цикла и обширных технических данных для конкретной конструкции двигателя и номинальных значений, необходимых для расчетов, заказчику необходимо обратиться к инженеру-электрику для расчета двигателя с приложением рабочего цикла.
Это новое всплывающее окно поверх окна браузера GeneratorJoe. НАЖМИТЕ, ЧТОБЫ ЗАКРЫТЬ ОКНО
Расчет параметров асинхронного двигателя
Параметры двигателя асинхронного двигателя имеют решающее значение, когда требуется ориентированное на поле управление с обратной связью по крутящему моменту/скорости. В частности, абсолютное положение потока ротора определяется математически с использованием известных скорости, напряжения и тока, а также модельного представления основных параметров двигателя. В этом блоге показано, как определить эти параметры.
Введение
Параметры двигателя асинхронных двигателей имеют решающее значение, когда требуется управление с обратной связью по крутящему моменту/скорости. В частности, абсолютное положение потока ротора определяется математически с использованием известных скорости, напряжения и тока, а также модельного представления основных параметров двигателя, показанного на рисунке ниже.
Эти параметры включают пофазное сопротивление ротора ‘R r ’, индуктивность рассеяния ротора ‘L lr ’, взаимной индуктивности ‘L m ’ и индуктивности рассеяния ротора ‘L lr ’ (потери в сердечнике R c не учитываются). Кроме того, для установки коэффициентов ПИД-регулирования FOC (поток и крутящий момент) необходимо сопротивление статора (R s ) и индуктивность статора (L ls ) в соответствии с методом, описанным в главе «Настройка коэффициентов FOC» — Раздел 8 Руководства пользователя контроллеров Roboteq v2. 0. Наиболее распространенными способами ручной оценки параметров асинхронного двигателя с помощью контроллера являются испытания асинхронного двигателя на холостом ходу и в условиях блокировки ротора.
Испытание без нагрузки
Испытание без нагрузки, как и испытание трансформатора при разомкнутой цепи, дает информацию о токе возбуждающего потока I d , индуктивности намагничивания L m и потерях при вращении. Испытание проводят путем подачи сбалансированного номинального напряжения на обмотки статора при номинальной частоте. Небольшая мощность, подаваемая на двигатель, обусловлена потерями в сердечнике, трением и потерями в обмотке. Двигатель будет потреблять необходимый поток I d тока, чтобы установить соответствующее магнитное поле. Двигатель будет вращаться почти с синхронной скоростью, что делает скольжение практически нулевым (s≈0). Следовательно, эквивалентная схема двигателя выражается следующим образом:
Предполагая, что R s (Ом), L s (Н) намного меньше, чем индуктивность намагничивания L м (Гн), можно получить следующее уравнение: 3
2 где V s (В) — приложенное фазное напряжение статора (среднеквадратичное значение), f s (Гц) — частота статора, а I (A) — действующее значение силы тока двигателя.
Чтобы провести вышеупомянутое испытание без нагрузки с контроллерами асинхронных двигателей RoboteQ, выполните следующие действия:
Пример:
Следующие данные были получены от производителя асинхронного двигателя:
P = 400 Вт (номинальная мощность)
I N = 23 A (номинальный ток статора)
В 1 7 пост. В (входное постоянное напряжение на контроллере)
f с = 90 Гц (номинальная частота статора)
n с = 2700 об/мин (синхронная скорость)
p= 2 (пары полюсов)
3, 9000 вольт коэффициент на герц, указанный на вкладке конфигурации, равен 9.0003
Затем двигатель работает в вольтах на герц, и соответствующие результаты утилиты Roborun+ показаны ниже.
Из приведенных выше результатов видно, что скорость статора близка к синхронной скорости (2700 об/мин), а скольжение очень мало из-за работы на холостом ходу.
Кроме того, ротор «Поток потока ротора» должен быть установлен в конфигурации как
Тестирование с заблокированным ротором
Тест с заблокированным ротором, как и тест на короткое замыкание в трансформаторе, предоставляет информацию об импедансе рассеяния и сопротивлении ротора. Ротор стоит на месте, а на обмотки статора подается низкое напряжение до номинального тока. В связи с тем, что индуктивность намагничивания L m значительно выше, чем индуктивности фаз рассеяния L ls , L lr , можно предположить, что в параллельном ответвлении L m не протекает ток. Обычно индуктивности рассеяния L ls , L lr должны составлять около 2-10% от индуктивности намагничивания L m . Поскольку скольжения при вращении нет (ротор стоит), s=1, что дает нам следующую эквивалентную схему.
Следовательно, фазы L ls (H), L lr (H), R s (Ом), R r (Ом) параметры двигателя рассчитываются следующим образом:
3 где P
s (Вт) – входная мощность двигателя фазы, V s (В) – приложенное фазное напряжение статора (пиковое значение), f с (Гц) — частота статора, cosφ — коэффициент мощности, I (А) — ток двигателя (среднеквадратичное значение), Z (Ом) — эквивалентное сопротивление фазы при испытании на заторможенный ротор.
Согласно уравнениям (7) и (8) предполагается, что сопротивление ротора равно сопротивлению статора, а индуктивность рассеяния ротора равна индуктивности рассеяния статора.
Чтобы провести вышеупомянутое испытание с заблокированным ротором с помощью контроллеров асинхронных двигателей, выполните следующие действия:
Установите режим работы «Вольт на Герц». Требуется действие обратной связи энкодера.
Настройте настройку Вольт на Герц в соответствии с пятикратным уменьшением номинального напряжения двигателя (пиковое значение напряжения статора согласно данным производителя) и частоты (1/5 номинального значения V/f). Причина настройки более низкого соотношения V/f, чем при испытании без нагрузки, заключается в том, чтобы соответствующим образом ослабить наведенное поле и уменьшить создаваемый крутящий момент при запуске, чтобы упростить блокировку ротора для испытания.
Заблокируйте ротор соответствующим инструментом/устройством и увеличьте команду до 80% номинального тока двигателя. Если создаваемый крутящий момент высок и ротор не может быть заблокирован, то соответствующим образом уменьшите значение Вольт на Герц при настройке и повторите испытание.
Рассчитайте приложенное V s , используя уравнение (2).
Рассчитайте мощность двигателя входной фазы P s , используя следующую формулу:
где V dc (V) – напряжение постоянного тока батареи, I dc (A) — постоянный ток батареи, η — КПД контроллера (для контроллеров RoboteQ допустим КПД 0,95). Напряжение и силу тока батареи можно измерить с помощью утилиты Roborun+.
Измерьте ток I q (A) с помощью утилиты Roborun+ (моментные усилители FOC).
Рассчитайте параметры двигателя L ls , L lr , R s , R r , используя уравнения (3) — (8).
Пример:
Для того же асинхронного двигателя в примере теста без нагрузки отношение Вольт/Гц установлено в 5 раз ниже номинального, то есть 0,053. Соответствующие результаты, взятые из утилиты Roborun+, показаны ниже:
Таким образом, входная мощность двигателя фазы P с равна
уравнение (4).
Следовательно, сопротивления статора и ротора двигателя R с = R r = 24 мОм в соответствии с уравнениями (5) и (7), а индуктивность рассеяния в соответствии с уравнением (6): синхронная частота в режиме холостого хода. Наконец, L ls = L lr = 76 мкГн согласно уравнению (8).
Расчет оптимального проскальзывания
После оценки L m , L ls , L lr , R s , R r параметры двигателя из испытаний на холостом ходу и с заблокированным ротором, оптимальное скольжение, при котором двигатель создает максимальный крутящий момент s maxT , можно оценить следующим образом:
скольжение в Гц, требуется следующее преобразование:
Пример:
Для рассчитанного L м = 754 мкГн, индуктивности рассеяния двигателя L лс = L lr = 76 мкГн и сопротивления R с0017 = R r = 24 мОм, расчетное оптимальное скольжение равно s = 5,1 Гц при номинальной частоте вращения двигателя.
Как рассчитать ток полной нагрузки однофазного и трехфазного двигателя (FLC) ~ Изучение электротехники
Рассчитать ток полной нагрузки однофазного или трехфазного двигателя переменного тока довольно просто. Однако необходимо полностью понимать термины входная мощность и мощность на валу двигателя, иначе в этом предполагаемом простом расчете будут допущены ошибки.
Входная мощность двигателя переменного тока — это мощность, которую он потребляет при подключении к однофазному или трехфазному источнику напряжения. Затем двигатель ускоряется, развивает крутящий момент и выдает мощность на валу.
Однако мощность на валу представляет собой механическую мощность, выдаваемую двигателем после учета потерь двигателя в статоре, роторе, обмотках и других потерь. Соотношение между входной электрической мощностью и механической мощностью на валу определяется следующим образом:
Выходная мощность двигателя на валу в кВт = Входная электрическая мощность в кВт x КПД двигателя
Таким образом, можно рассчитать входную электрическую мощность, когда мы знаем подробности об источнике питания двигателя, то есть о напряжении, коэффициенте мощности, потребляемом токе и КПД.
Однако, как это обычно бывает с большинством электродвигателей, номинальная мощность в кВт или л.с. обычно представляет собой мощность на валу, которую двигатель может передать нагрузке. Эта мощность на валу зависит от сетевого напряжения, коэффициента мощности, тока полной нагрузки и КПД двигателя, как показано ниже:
В Европе мощность на валу обычно измеряется в киловаттах (кВт). Однако в США мощность на валу измеряется в лошадиных силах (л.с.).
Мощность на валу однофазного двигателя определяется по формуле:
Мощность на валу однофазного двигателя, кВт =
U * I *CosØ*ɳ/1000
Где:
U = Напряжение сети
I = ток сети или ток полной нагрузки
CosØ = Коэффициент мощности
ɳ = КПД двигателя
Вал Мощность трехфазного двигателя определяется по формуле:
3-фазный Мощность на валу двигателя, кВт =
U * I *CosØ*√3*ɳ/1000
Где:
U = Напряжение сети
I = Линейный ток или Полный Ток нагрузки
CosØ = Коэффициент мощности
ɳ = КПД двигателя
Как рассчитать ток нагрузки однофазного и трехфазного двигателя фазный двигатель переменного тока, питаемый от источника 240 В с расчетным коэффициентом мощности 0,8 и КПД 85%, ток полной нагрузки будет получен путем изменения формулы мощности для однофазных двигателей, чтобы получить ток полной нагрузки двигателя как:
Ток полной нагрузки, I =
Одиночная мощность в кВт *1000/(U* CosØ* ɳ)
Здесь:
У = 240
CosØ = 0,8
ɳ = 0,85
Мощность в кВт = 1,5 * 746/1000 = 1,119
Примечание 1 HP = 746 Вт
Следовательно, I =
(1,119 * 1000)/(240 * 0,8 * 0,85) = 6,86 Ампер
Предположим, у нас есть 3-фазный двигатель переменного тока мощностью 10 кВт с напряжением 415 В, 3-фазным источником питания с линейным напряжением, коэффициентом мощности 0,8 и КПД 88 %. Полный ток нагрузки будет получен путем манипулирования формулой мощности для 3-фазные двигатели, обеспечивающие ток полной нагрузки двигателя:
Ток полной нагрузки, I =
Мощность трехфазного двигателя в кВт *1000/(U * I *CosØ*√3*ɳ)
Здесь:
У = 415
CosØ = 0,8
ɳ = 0,88
Следовательно, I =
(10*1000)/(415 * 0,8*0,88*√3) = 19,76 Ампер
Важные примечания по расчету мощности двигателя
Электрическая мощность, потребляемая однофазным двигателем в кВт = U * I *CosØ/1000
который ДОЛЖЕН указывать для расчета мощности, потребляемой двигателем. Если явно не указано иное, номинальная мощность двигателя в кВт или лошадиных силах всегда представляет собой мощность на валу, и в этом случае для расчета входной мощности потребуется эффективность двигателя, а затем можно рассчитать фактический ток, потребляемый двигателем. 2258
Аналогично, электрическая мощность, потребляемая трехфазным двигателем в кВт, определяется как:
= U * I *CosØ*√3/1000
или линейный ток, который ДОЛЖЕН указывать для расчета мощности, потребляемой двигателем. Если явно не указано иное, номинальная мощность двигателя в кВт или лошадиных силах всегда представляет собой мощность на валу, и в этом случае для расчета входной мощности потребуется эффективность двигателя, а затем можно рассчитать фактический ток, потребляемый двигателем.2258
Калькулятор расчета мощности двигателя и постоянного тока, 1-фазной и 3-фазной мощности Fromula
Калькулятор мощности двигателя:
Введите ток, напряжение и коэффициент мощности для расчета мощности постоянного и переменного тока. Коэффициент мощности не требуется для расчета мощности постоянного тока. Наконец, нажмите кнопку расчета.
Выберите тип тока DCAC – однофазный AC – трехфазный
Введите ток в амперах
Введите напряжение в вольтах
Результат мощности в милливаттах
Результат мощности в ваттах
Результат мощности в киловаттах
Расчет мощности двигателя в различных единицах измерения:
Мощность двигателя имеет пять единиц измерения в зависимости от количества: мкВт, мВт, Вт, кВт и МВт.
Здесь мкВт, мВт используются для обозначения двигателя очень малого размера мощностью до 1 Вт, такого как шаговый двигатель, реактивный двигатель и т. д. дрель, свет лампы, воздуходувка и т. д.
кВт используется для обозначения двигателя средней мощности до 1000 кВт. Пример: насосы, воздуходувка, осушитель и т. д.
МВт используется для двигателя увеличенного размера до 1000 МВт. Пример маслоотсасывающий насос, питательный поливочный насос котла. Двигатель дробилки и т. д.
Однако единицы измерения Вт и кВт широко используются для обозначения мощности двигателя.
Здесь мы собираемся рассчитать мощность для трех типов двигателей на основе входного питания, такого как постоянный ток, однофазный и трехфазный.
Расчет мощности двигателя постоянного тока:
Мощность двигателя постоянного тока Потребляемая мощность P (кВт) в киловаттах равна произведению постоянного тока якоря I (A) в амперах на напряжение якоря постоянного тока V (В) , деленное на 1000. Следовательно расчет мощности двигателя в кВт,
P (кВт) = V (В) x I (A) /1000 в киловаттах.
Для расчета мощности по формуле:
P (Вт) = В (В) x I (А) в ваттах.
Для расчета мощности двигателя постоянного тока в мегаваттах:
P (МВт) = В (В) x I (А) /100000 в мегаваттах.
Для расчета выходной мощности двигателя постоянного тока нам необходимо умножить приведенные выше формулы на КПД двигателя.
Выходная мощность двигателя постоянного тока = входная мощность двигателя x эфф.
Примечание. Напряжение В (В) , измеряемое между клеммами якоря, и постоянный ток I (А) будет током якоря.
Расчет мощности однофазного двигателя переменного тока:
Однофазная потребляемая мощность переменного тока P (кВт) в киловаттах равна произведению коэффициента мощности, умноженного на ток I (А) и напряжение В (В) разделить на 1000. Следовательно, формула однофазной мощности может быть записана как
Однофазная мощность переменного тока в киловаттах
P (кВт) = В (В) x I (А) x пф / 1000
Однофазная мощность переменного тока в ваттах
P (W) = V (V) x I (A) x pf.
Однофазная мощность переменного тока в мегаваттах,
P (МВт) = В (В) x I (A) x пф / 1000000
Расчетная мощность, мощность двигателя
мощность, которая рассчитывается по одной из приведенных выше формул для умножения на КПД двигателя. Здесь КПД двигателя указан на паспортной табличке
Выходная мощность одного двигателя переменного тока = Входная мощность двигателя x КПД
Расчет мощности трехфазного двигателя переменного тока:
Мощность трехфазного двигателя можно рассчитать по двум формулам, одна из которых использует линейное напряжение и линейное напряжение.
Примечание. Однофазное напряжение V (В) в вольтах должно измеряться между фазой и нейтральной клеммой.
При линейном напряжении:
Мощность трехфазного двигателя переменного тока в киловаттах P (кВт) равна произведению между линейным напряжением и током в 1,732 раза I (A) в AMPS, разделенные на 1000.
P (кВт) = 1,732 x V (V) x I (A) /1000 кВт
P (MW) = 1,732 x v P (MW) = 1,732 x v . (V) x I (a) /1000000 МВт
P (W) = 1,732 x V (V) x I (A) Watts
. Примечание: The The The Trabletage
. V (V) в вольтах должно быть измерено между линейным напряжением.
Использование Линейное напряжение:
P (кВт) равен 3-кратному произведению линейного напряжения и тока нейтрали I (A) в амперах, деленному на 1000.
P (кВт) = 3 x В ( V) x I (a) /1000 кВт
P (MW) = 3 x V (V) x I (A) /1000000 MW
P (w (w (w (w (w (w (w (w (w /1000000 м. ) = 3 x В (В) x I (А) Ватт
Примечание: Напряжение В (В) в вольтах следует измерять между напряжением линии и нейтрали.
Здесь выходная мощность трехфазного двигателя равна коэффициенту полезного действия входной мощности, который рассчитывается по приведенным выше формулам.
Выходная мощность трехфазного двигателя переменного тока = Входная мощность двигателя x КПД
Мощность и крутящий момент в асинхронных двигателях
Здравствуйте, ребята, я надеюсь, что вы все весело проводите время в своей жизни. В сегодняшнем уроке мы обсудим мощность и крутящий момент в асинхронных двигателях. Поскольку асинхронные двигатели являются двигателями с самозапуском, их отношения мощности (P) и крутящего момента (t) значительно отличаются от соотношений в синхронном двигателе. Как мы уже говорили, асинхронный двигатель также известен как вращающийся трансформатор. Его входное питание представляет собой 3-х кратную схему тока (I) и напряжения (V).
В случае обычного трансформатора выходом является электрическая мощность, получаемая от вторичной части трансформатора. Но в случае, если вторичная часть двигателя (обмотки) или (ротор) имеет короткое замыкание в концевой точке, то невозможно получить выход в виде электрической мощности, а его выход представляет собой механическую мощность. В сегодняшнем посте мы рассмотрим, как крутящий момент возникает в асинхронном двигателе, и как он связан с мощностью двигателя. Итак, начнем с Мощность и крутящий момент в асинхронных двигателях.
Мощность и крутящий момент в асинхронных двигателях
Входное питание (P в ), подаваемое на асинхронный двигатель, представлено в виде 3-ø тока (I) и напряжения (V).
После подачи питания на статор двигателя мы должны столкнуться с некоторыми потерями мощности в статоре, известными как потери в меди или потери I 2 R.
Некоторые части потребляемой мощности также теряются из-за гистерезисных потерь и вихревых токов в стабилизирующей части двигателя.
Остаточная мощность передается на ротор двигателя, пересекая воздушный зазор между неподвижной частью (статор) и вращающейся частью (ротор).
Эта мощность называется мощностью воздушного зазора (P AG ) двигателя.
Оставшаяся мощность, переданная на ротор после устранения потерь в меди I 2 R, преобразуется в механическую мощность на роторе.
После этой потери мощности из-за трения, потери сопротивления воздуха (P F&W ) и из-за паразитных потерь (P misc ) оставшаяся мощность, которую мы получаем на выходе, называется выходной мощностью двигателя (P out ).
В диаграмме потока мощности в этой точке упоминаются потери в сердечнике, обычно они в этой точке не упоминаются.
Особенности потерь в сердечнике, где они отмечены в двигателе, несколько случайны.
Эти потери (потери в сердечнике) двигателя существуют наполовину со стороны статора и наполовину со стороны ротора.
Между тем, асинхронный двигатель обычно работает на скорости, близкой к синхронной скорости (n sync ), сравнительное вращение полей над корпусом ротора довольно вялое, а потери в сердечнике ротора малы, связанные с потерями в сердечнике на задающей части ротора.
Так как основная часть потерь в сердечнике (I 2 R) приходится на конформирующую часть двигателя, по этой причине потери в сердечнике указаны в этом месте на силовой диаграмме.
Этот тип потерь был обозначен R c в соответствующей (эквивалентной) схеме двигателя, эту схему мы уже изучали в последнем уроке по эквивалентной схеме асинхронного двигателя .
Если потери в сердечнике (I 2 R) предполагаются только нулевым (X ватт) вместо этого компонента схемы, они часто берутся вместе с механическими потерями и вычитаются в том месте на рисунке, где расположены механические потери. .
Другие потери, а именно паразитные, парусные и дробные, зависят от скорости двигателя, чем больше скорость, тем больше эти потери.
Но если скорость двигателя почти равна или приближается к синхронной скорости, то потери в сердечнике будут иметь меньшее значение.
Итак, эти 3 класса потерь иногда объединяют и называют вращательными потерями.
Общие потери вращения двигателя часто измеряются как непрерывные (постоянные) при изменении скорости, в то время как составные потери изменяются в противоположных направлениях при изменении скорости.
Уравнения мощности и крутящего момента асинхронного двигателя
Сначала мы обсудим уравнения мощности ротора.
Уравнение мощности асинхронного двигателя
Если мы изучим пофазную эквивалентную схему асинхронного двигателя, то мы можем использовать ее для расчета крутящего момента и мощности, чтобы понять работу двигателя.
Значение входного тока (I) для фазы (ø) двигателя может быть получено путем деления входного напряжения (V) на полное равное полное сопротивление (Z).
I1 = V ø /Z eq
Z eq = R1+Jx1 + 1/ (Gc -JB M + (1/(V2/s + Jx2))
Итак, статор (I 2 9 R) можно рассчитать потери в меди (P SCL ), потери в сердечнике и роторе (I 2 R).
Потери в статоре (I 2 R) в 3-ø указаны ниже.
(P SCL )= 3I 1 R 1
Потери в сердечнике определяются как.
P сердечник = 3E 2 G c
Воздушный зазор обозначен как.
P AG = P в – (P SCL )- P сердечник
Если мы наблюдаем на соответствующей (эквивалентной) схеме ротора. Компонент схемы, на который может расходоваться мощность воздушного зазора (P AG ), находится в сопротивлении R 2 /S.
Таким образом, мощность воздушного зазора (P AG ) также может быть представлена как.
(P AG ) = 3I 2 2 (R 2 /с) ——(A)
Реальные резистивные потери мощности в цепи ротора принимаются уравнением.
P RCL = 3I 2 R x R R
Поскольку мощность не изменяется при обозначении (относительно) идеального (идеального) трансформатора, потери в меди ротора 7 RCL (P ) также может быть указано как
P РКЛ = 3I 2 2 x R 2 —(B)
Когда все потери, возникающие в двигателе, таком как P SCL , потери в сердечнике, потери в меди на роторе исключены из входного сигнала, подаваемого на питание остаточная мощность преобразуется из электрической в механическую.
Эта преобразованная мощность может быть определена как.
P CONV = P AG -P RCL = (3I 2 2 x R 2 /с) – (3I 2 2 x R R ) = 3I 2 2 R 2 (1/с – 1)
Из уравнения А и В видно, что потери в меди (P RCL) эквивалентны мощности воздушного зазора (P AG ), умноженной на скольжение (S).
P RCL = sp AG
Из этого уравнения видно, что потери в меди ротора прямо пропорциональны скольжению двигателя.
Если ротор не движется, то значение скольжения будет равно единице, тогда P AG полностью израсходуется в роторе.
Разумно, если ротор не движется, P из будет равен 0.
Как мы обсуждали это ранее.
P CONV = P AG -P RCL
Это обеспечит дополнительную связь между мощностью воздушного зазора (P AG ) и P conv от электрического к механическому.
P CONV = P AG -P RCL
Подставляем значение P RCL в приведенное выше уравнение.
P CONV = P AG – sp AG
P CONV = (1-s)P AG
9002 выходную мощность двигателя можно определить как.
Р вых = Р conv – P F&W – P misc
P out – это выходная мощность двигателя, которую мы получили после устранения различных потерь, возникающих в трехфазном асинхронном двигателе.
Крутящий момент в асинхронном двигателе
Индукционный крутящий момент T ind в двигателе, объясняемый как крутящий момент, создаваемый внутренними преобразованиями электрической энергии в механическую.
Этот крутящий момент (t) отличается от крутящего момента, фактически достигаемого в точках (терминалах) двигателя, на величину, идентичную моментам трения и ветра в двигателе.
Значение крутящего момента определяется как.
t ind = P conv /w m
Этот крутящий момент известен как индуцированный крутящий момент в двигателе.
Вышеприведенное уравнение крутящего момента также может быть определено в виде потерь на скольжение и мощности в воздушном зазоре.
t ind = (1-s)P AG / (1-s)w sync
Это уравнение особенно ценно, поскольку оно объясняет индуцированный крутящий момент (t ind ) в виде мощности воздушного зазора (P AG ) и синхронной скорости (W sync ), которая не колеблется. Информация (P AG ) следовательно прямые урожаи t ind .
Разделение P
RCL и P conv в эквивалентной цепи асинхронного двигателя
Как мы уже говорили, мощность, поступающая от (P AG ), некоторая часть теряется в меди ротора (P RCL ) а остальное преобразуется в выходную механическую мощность.
Возможно выделить 2 части мощности воздушного зазора (P AG ) и обозначить их четко на схеме двигателя.
(P AG ) = 3I 2 2 (R 2 /s)
P RCL = 3I 2 R x R R
These 2 given equations приведите выражения для потерь мощности в воздушном зазоре и потерь в меди ротора.
Мощность воздушного зазора (P AG ) — это мощность, которая будет затрачена на сопротивление величиной R 2 /с.
Принимая во внимание, что потери в меди ротора (P RCL ) — это мощность, которая будет потрачена на сопротивление значения (R).
Изменение среди них (P conv ), которое должно быть силой, потраченной в форме сопротивления.
R усл = (R2/S) – R 2 = R2(1/с -1)
Соответствующая схема Per-ø с потерями в меди ротора (P RCL ) и мощностью, преобразованной в механическая часть, разделенная на отдельные компоненты, показана на схеме.
 Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
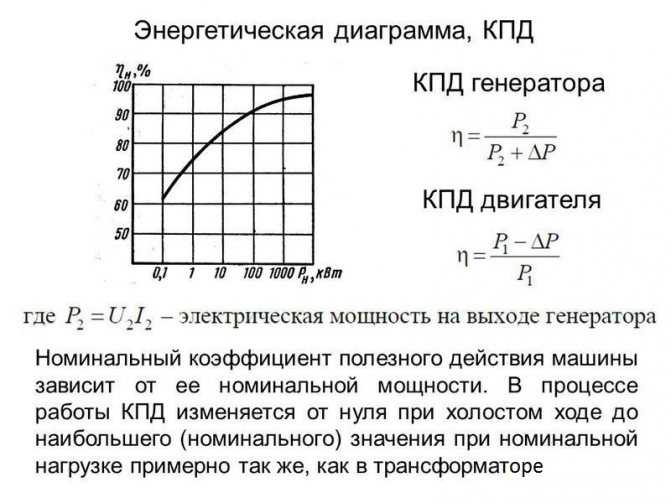
Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
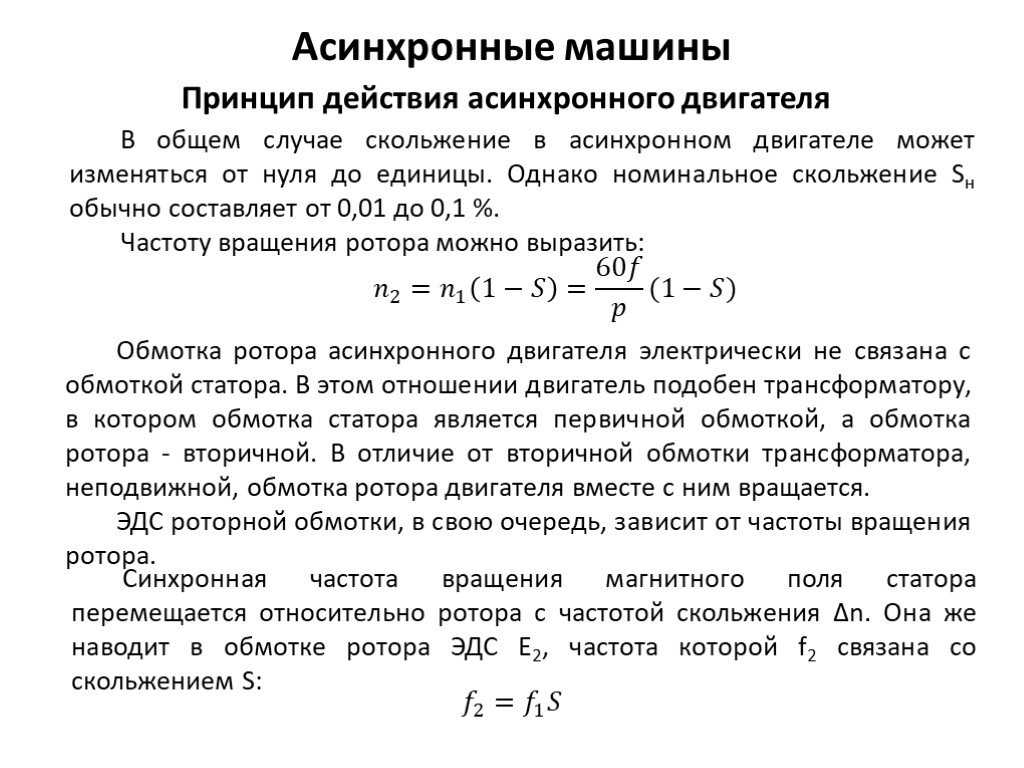 Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
 ru.
ru.


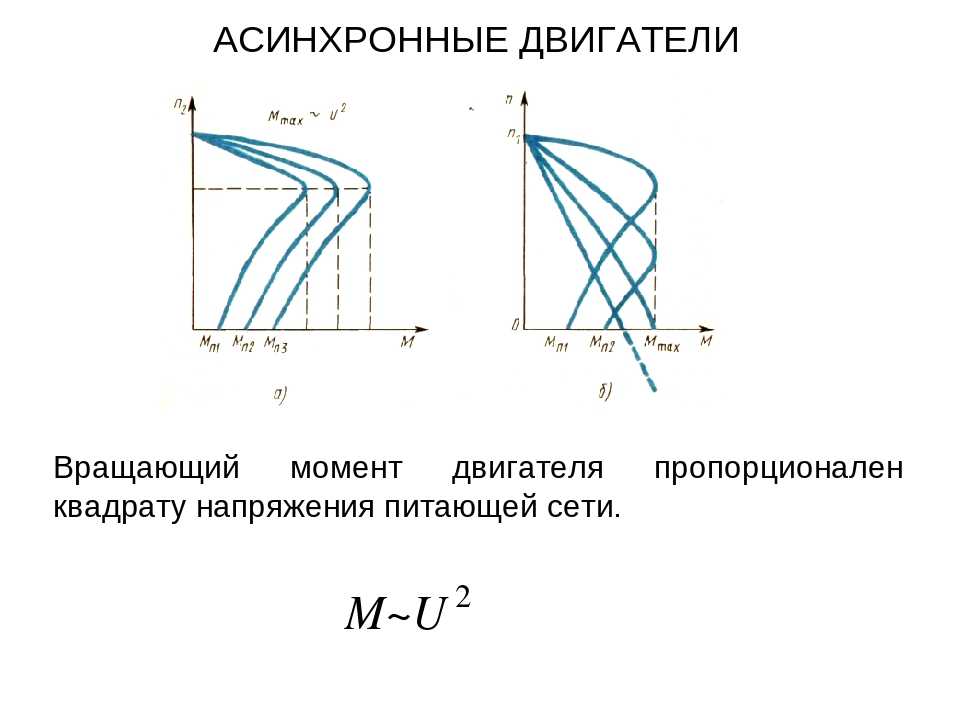
 38) и
38) и 41)
41) В практических расчетах
В практических расчетах

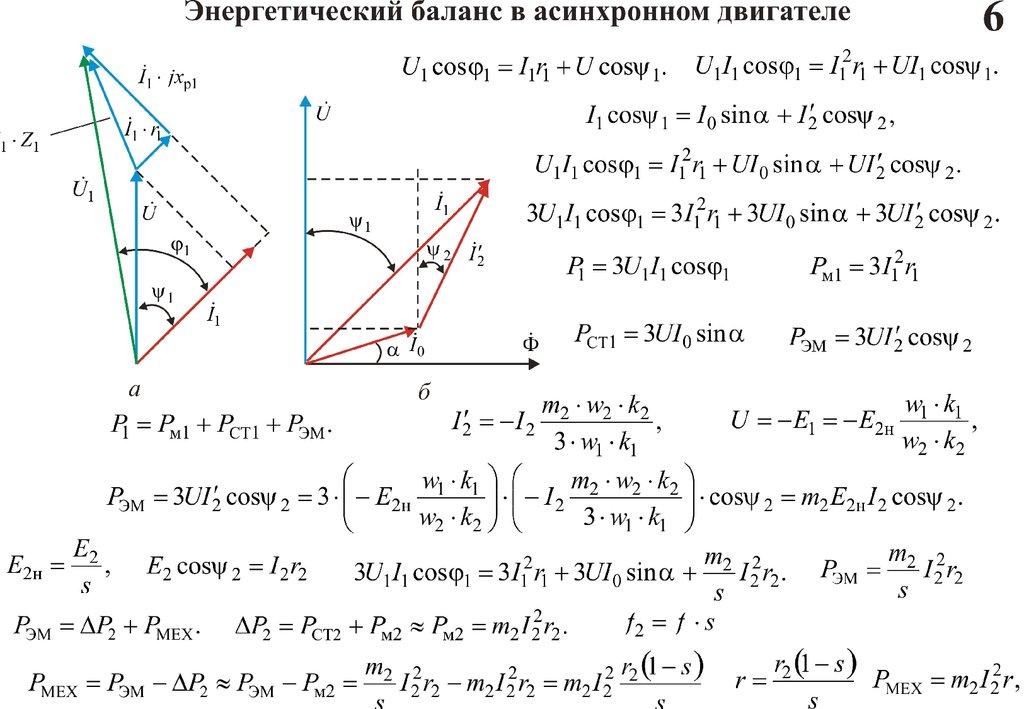
 46)
46)
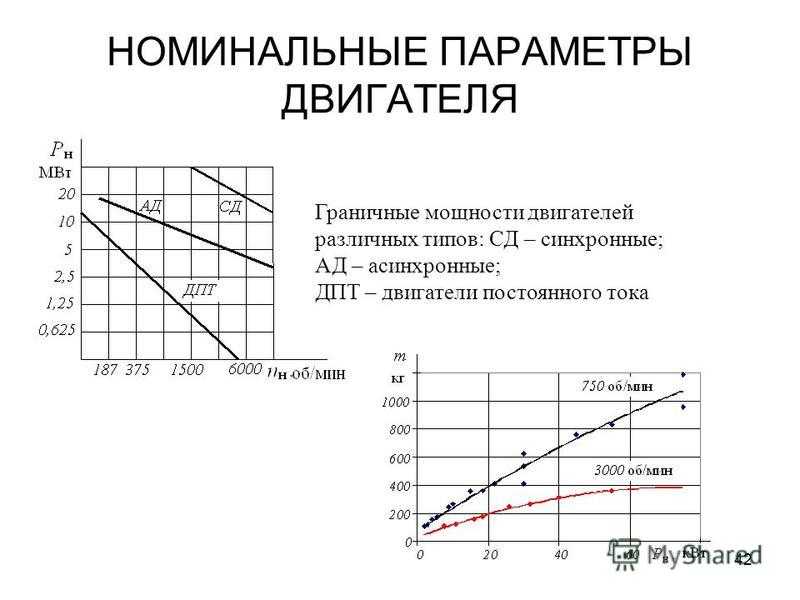

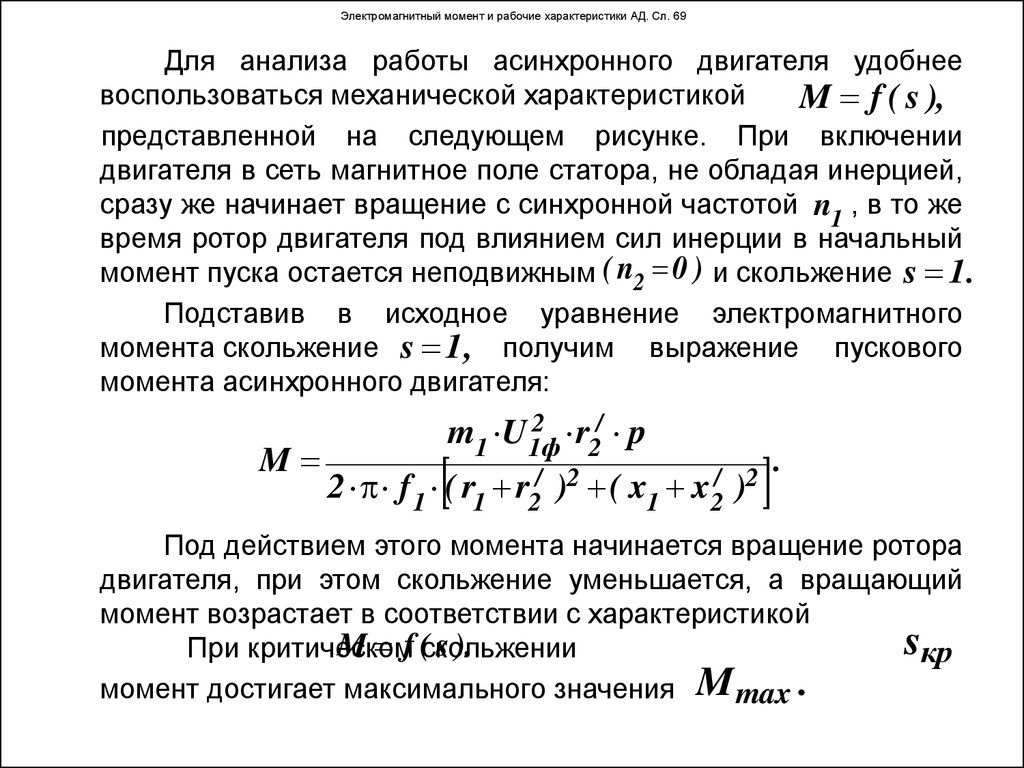 устройств) указывают активную мощность в Вт и cosφ / или λ /или PF. Что тут к чему см. ниже.
устройств) указывают активную мощность в Вт и cosφ / или λ /или PF. Что тут к чему см. ниже.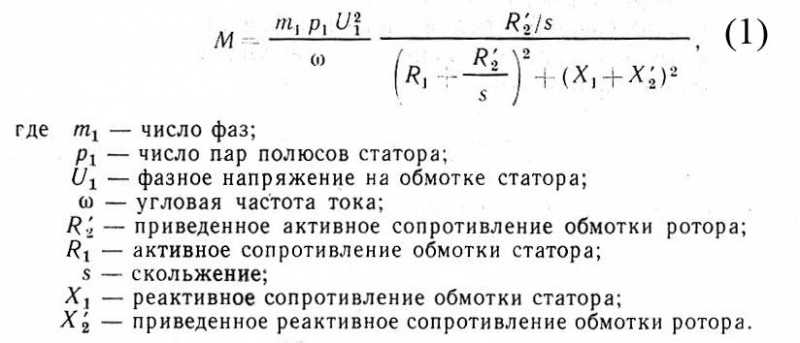 Величина sin φ для значений φ от 0 до -90° является отрицательной величиной
Величина sin φ для значений φ от 0 до -90° является отрицательной величиной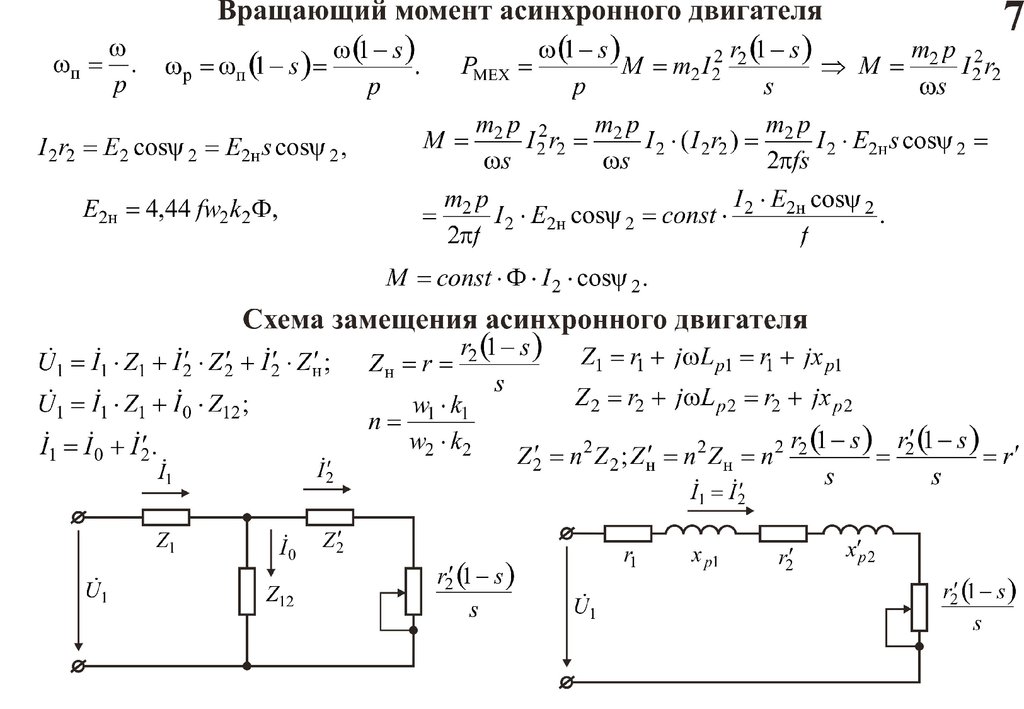 Реактивная мощность в идеале не выполняет работы, т.е. название вводит в заблуждение. Легко догадаться глядя на рисунок, что:
Реактивная мощность в идеале не выполняет работы, т.е. название вводит в заблуждение. Легко догадаться глядя на рисунок, что: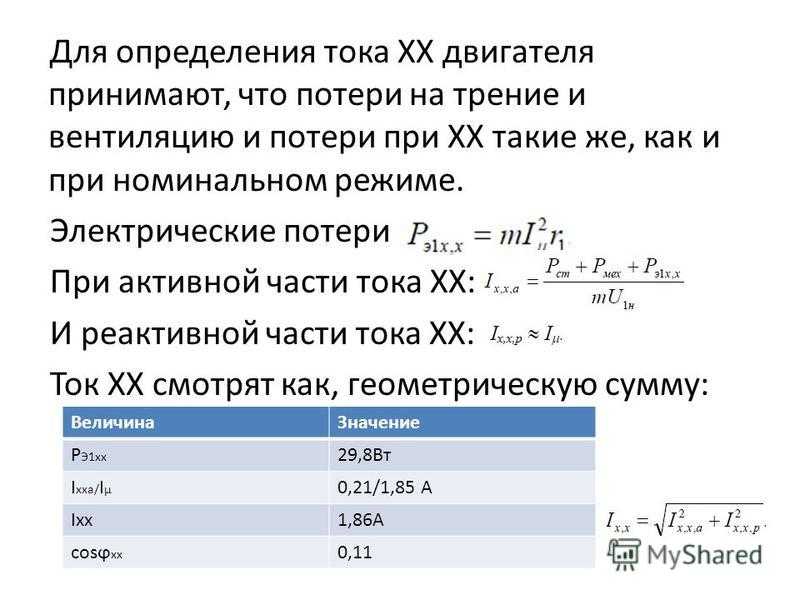
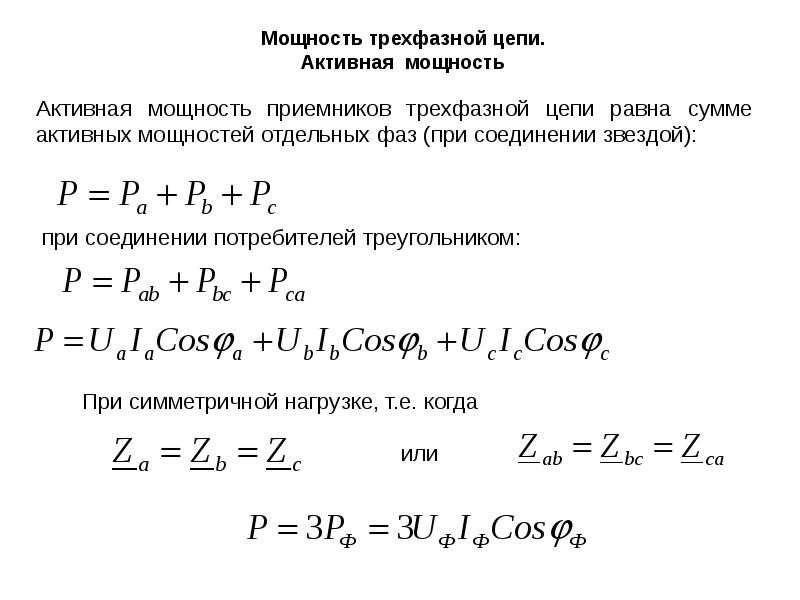 И такая величина вводится под названием коэффициент мощности («косинус фи», power factor, PF), как отношение активной мощности к полной, естественно сразу в 2-х видах, в РФ это:
И такая величина вводится под названием коэффициент мощности («косинус фи», power factor, PF), как отношение активной мощности к полной, естественно сразу в 2-х видах, в РФ это: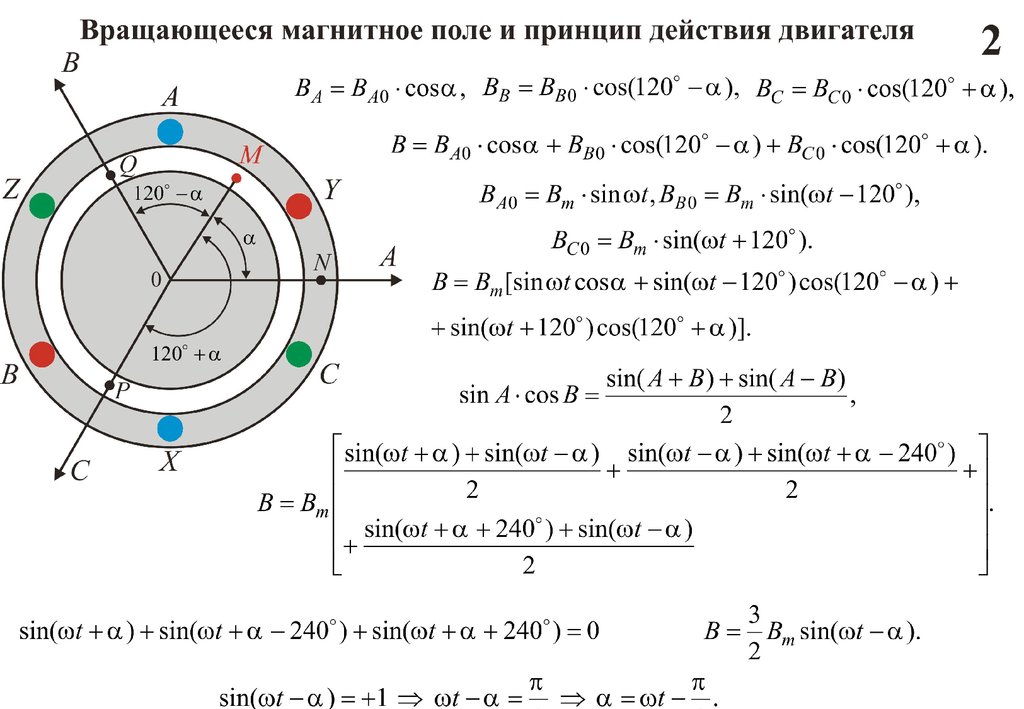
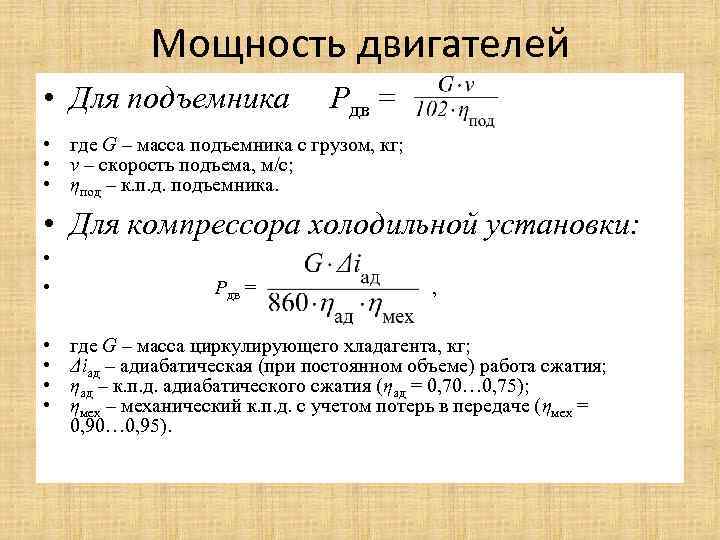 Но выражение (6), несмотря на свою простоту, не дает возможности выяснить влияние различных факторов на величину вращающего момента. Поэтому в курсе электротехники часто используют другое выражение:
Но выражение (6), несмотря на свою простоту, не дает возможности выяснить влияние различных факторов на величину вращающего момента. Поэтому в курсе электротехники часто используют другое выражение:
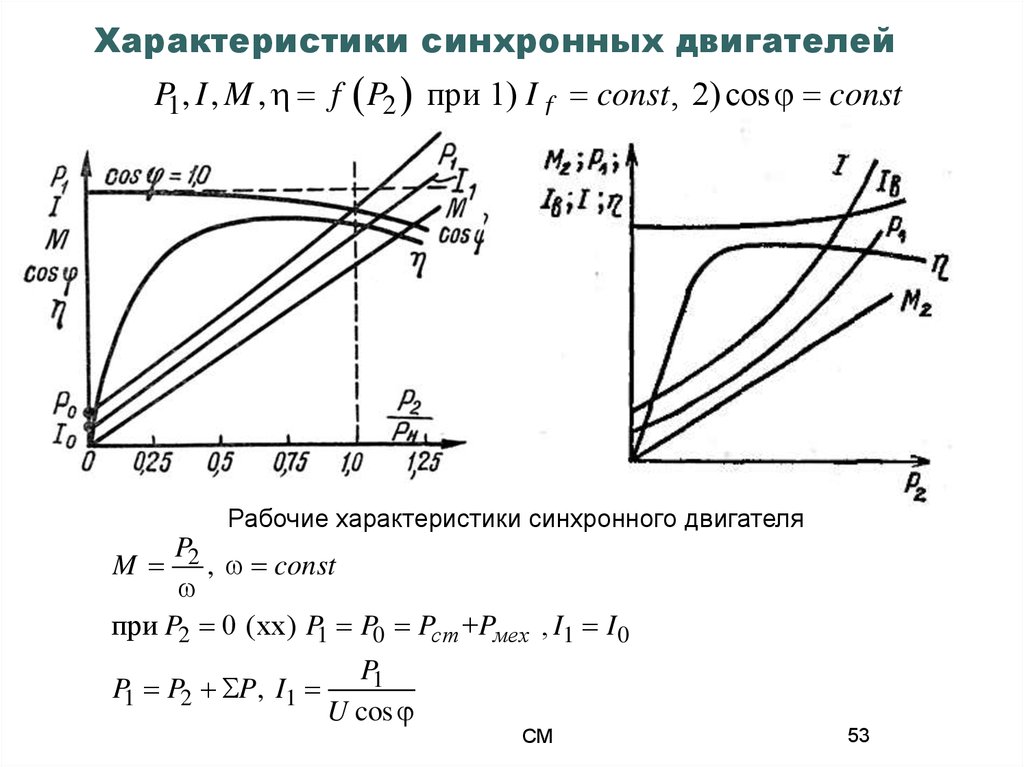 Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск — из паспорта).
В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск — из паспорта).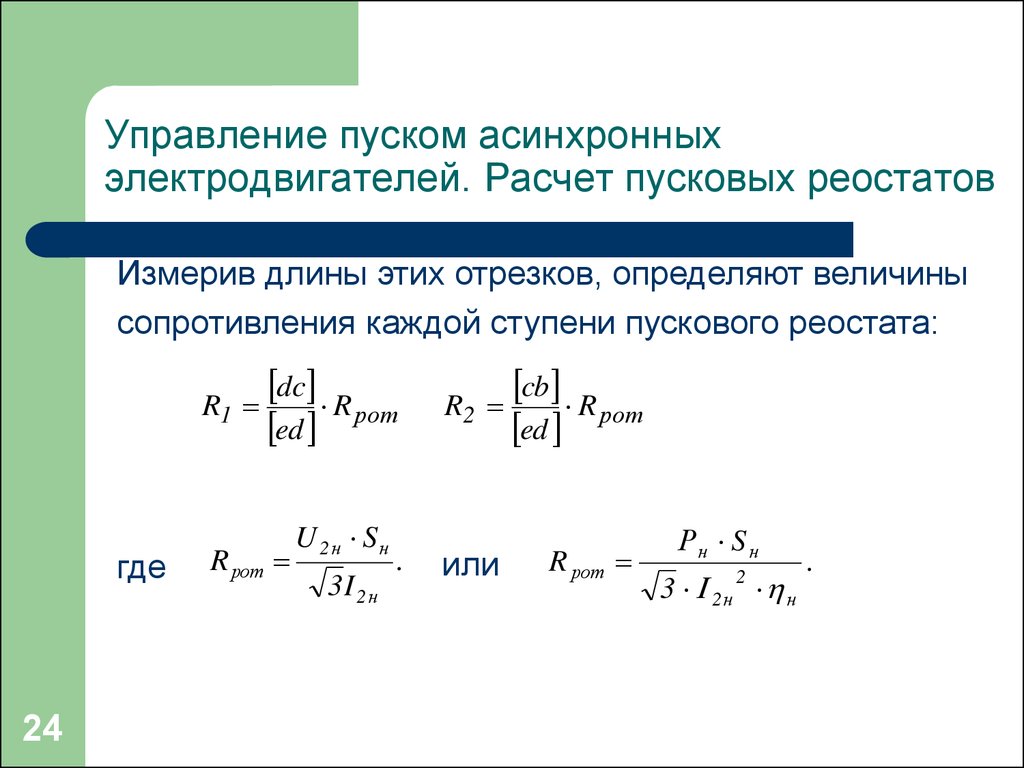 Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.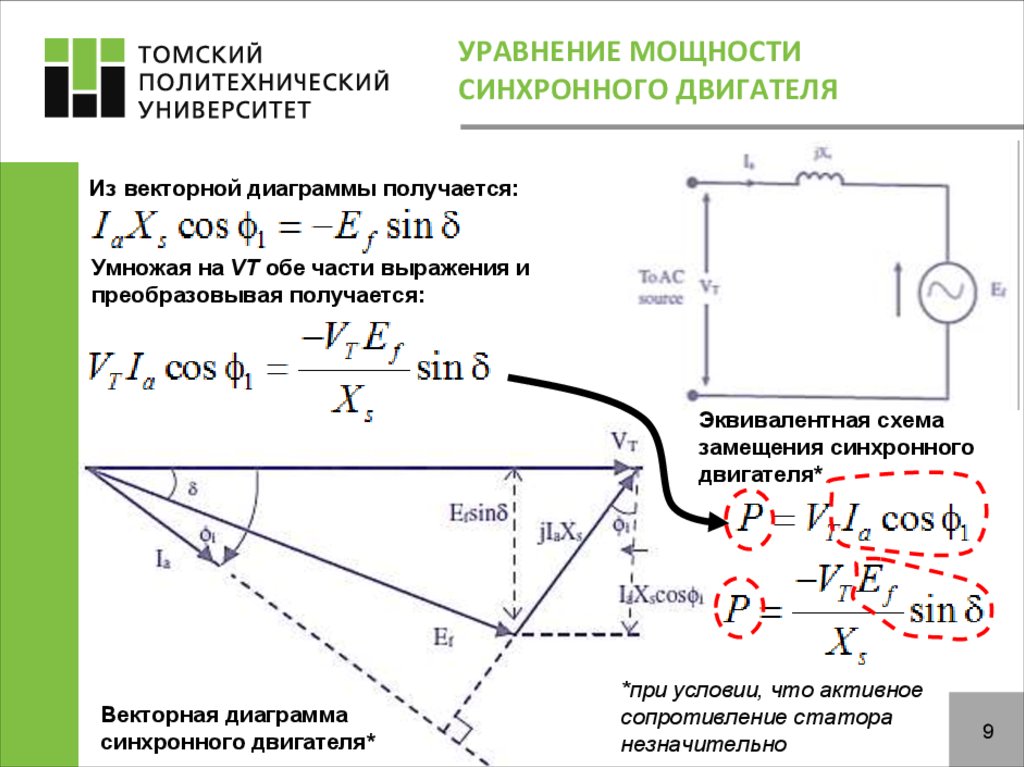 Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
 Поэтому при различных активных сопротивлениях роторной цепи кривые М = f(s) имеют различный характер. Эти кривые показывают, что пусковой момент асинхронного электродвигателя с фазным ротором можно искусственным образом изменять, вводя различные активные сопротивления в
Поэтому при различных активных сопротивлениях роторной цепи кривые М = f(s) имеют различный характер. Эти кривые показывают, что пусковой момент асинхронного электродвигателя с фазным ротором можно искусственным образом изменять, вводя различные активные сопротивления в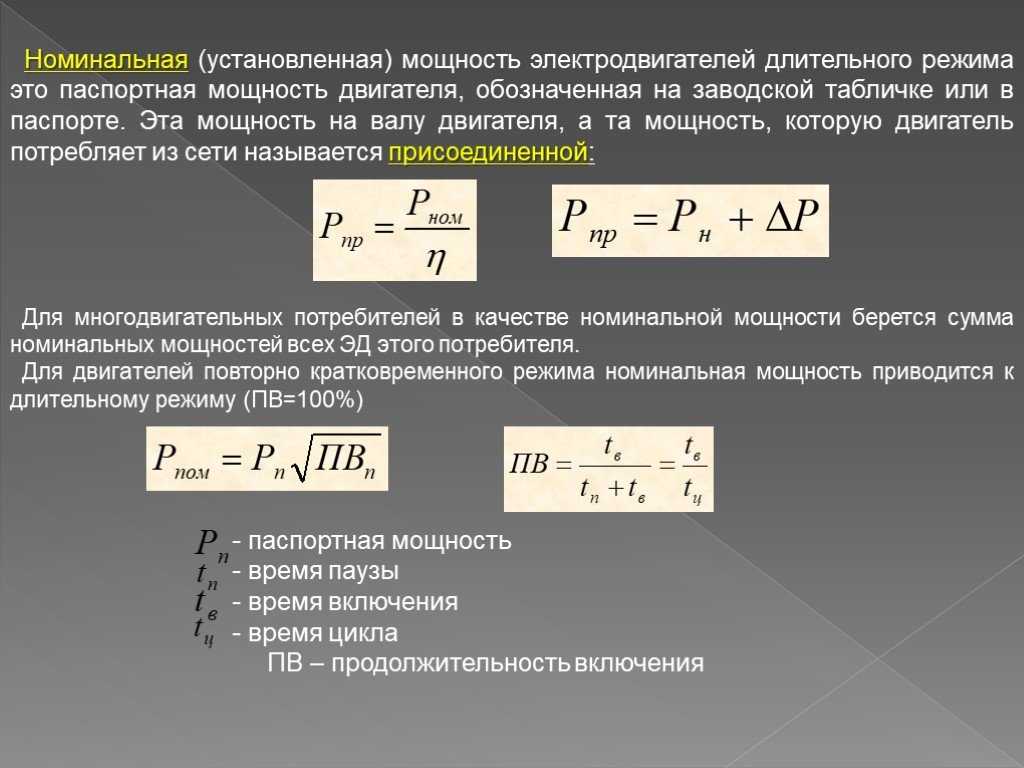 Примером такого режима работы могут служить конвейеры.
Примером такого режима работы могут служить конвейеры. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.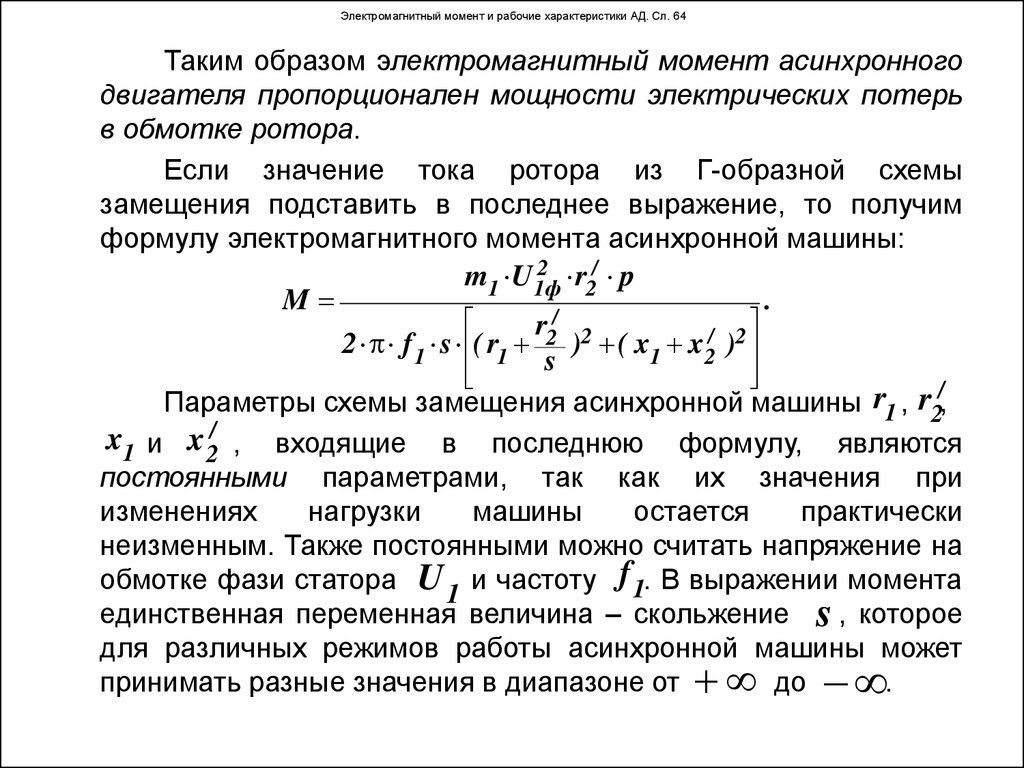 Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
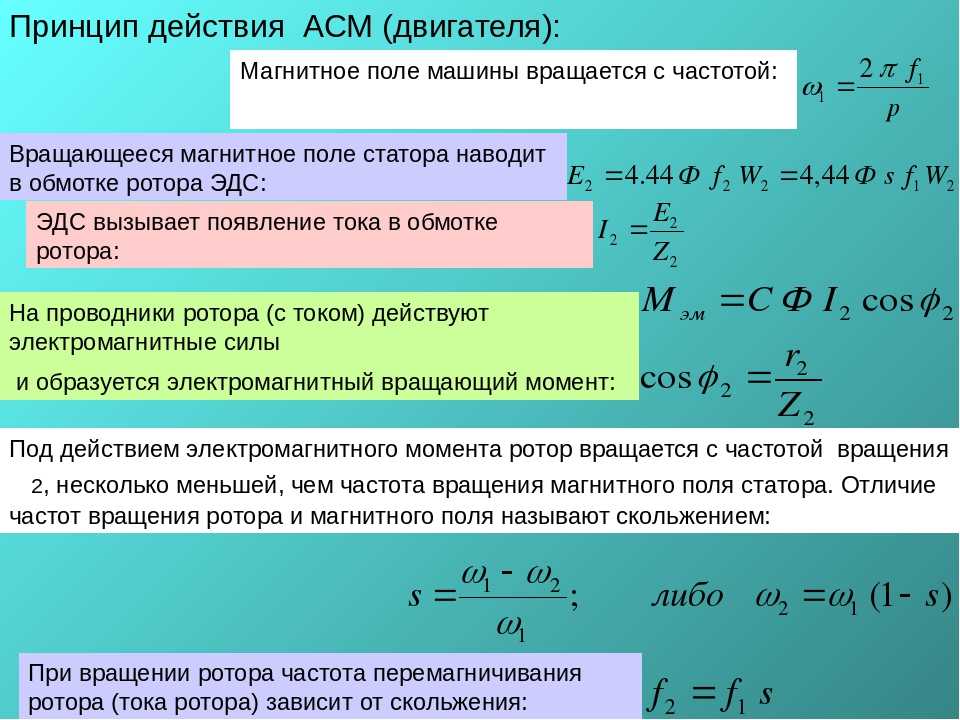
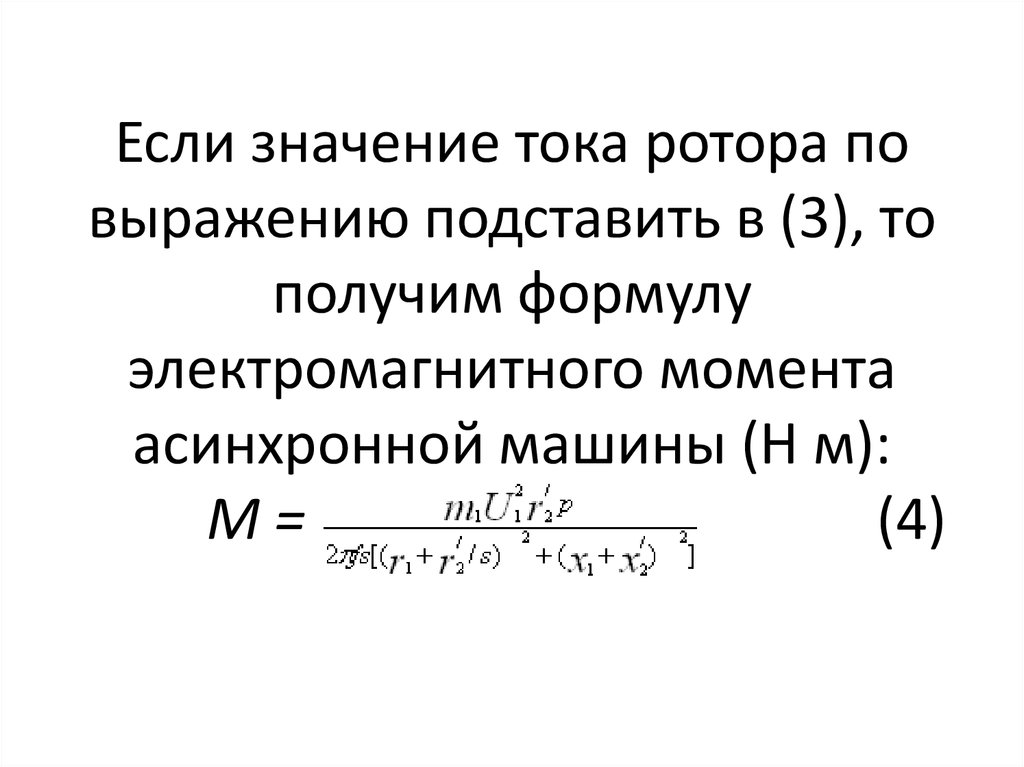 В справочниках по электрическим машинам можно увидеть эти зависимости.
В справочниках по электрическим машинам можно увидеть эти зависимости.
 Различные механические характеристики для разных исполнений асинхронных двигателей показаны на рис
Различные механические характеристики для разных исполнений асинхронных двигателей показаны на рис
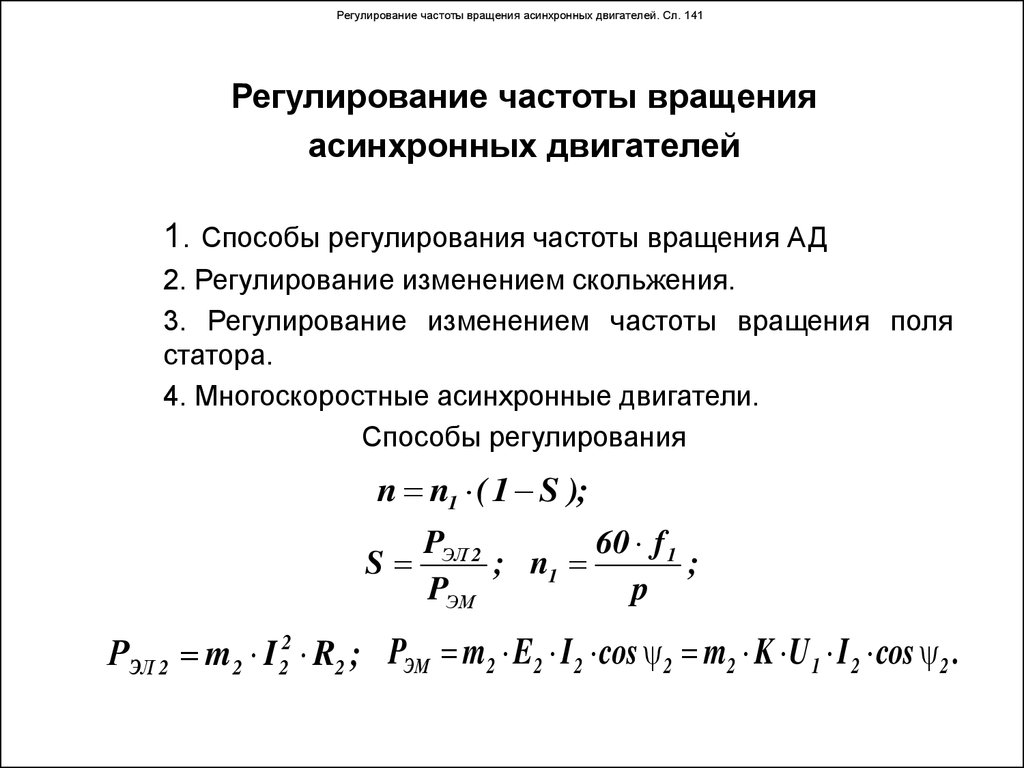
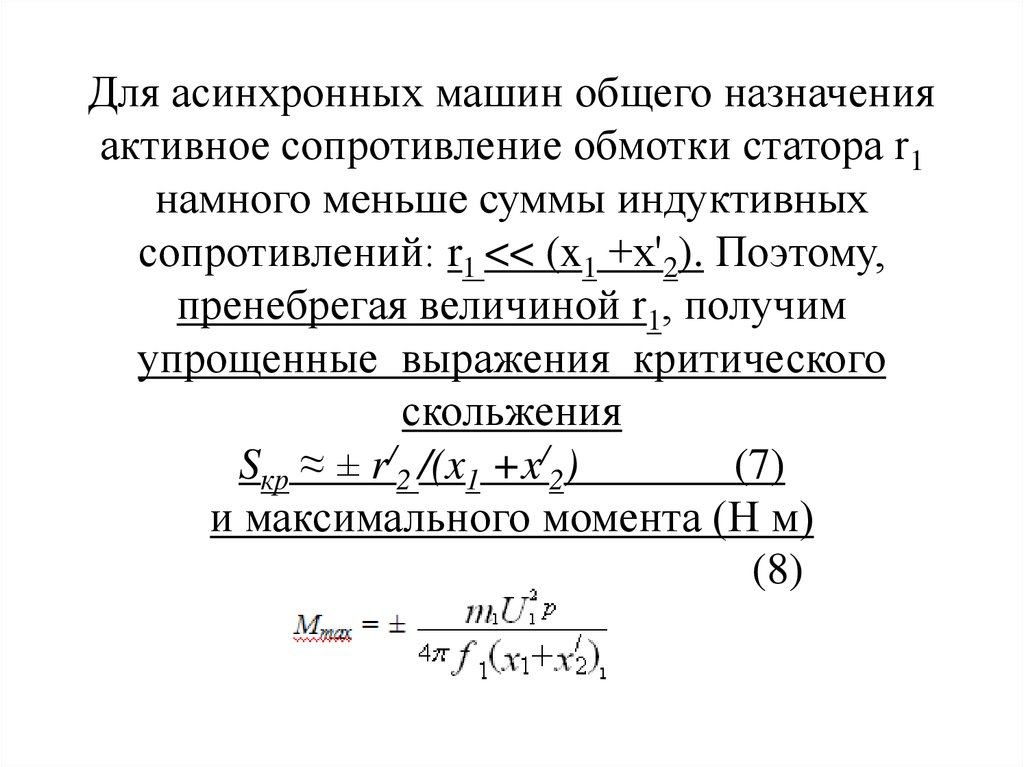

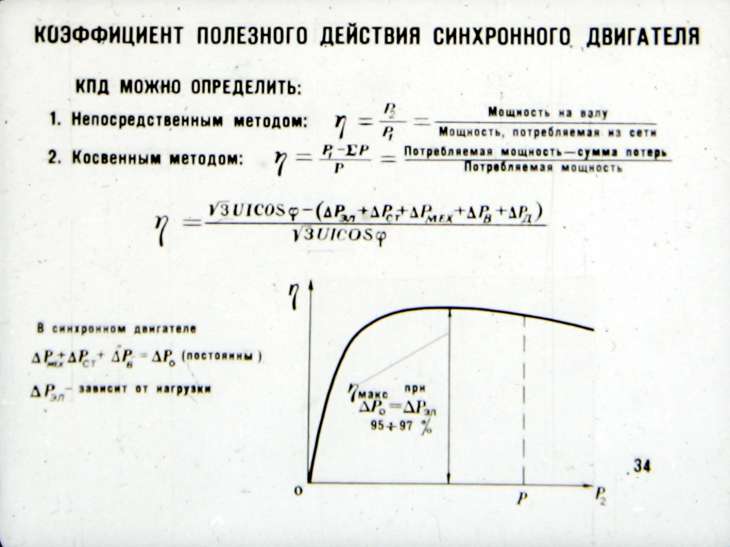 Хк – сопротивление индуктивное асинхронного электродвигателя при коротком замыкании:
Хк – сопротивление индуктивное асинхронного электродвигателя при коротком замыкании: Поэтому величина r12 существенно мала, по сравнению Хк, и ею можно пренебречь без ущерба для точности:
Поэтому величина r12 существенно мала, по сравнению Хк, и ею можно пренебречь без ущерба для точности: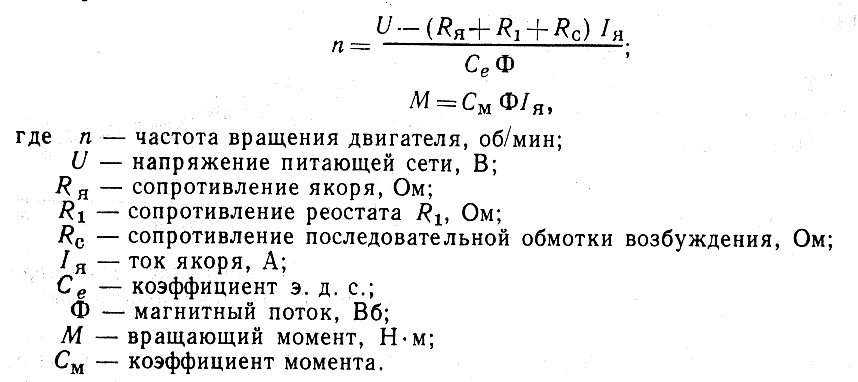
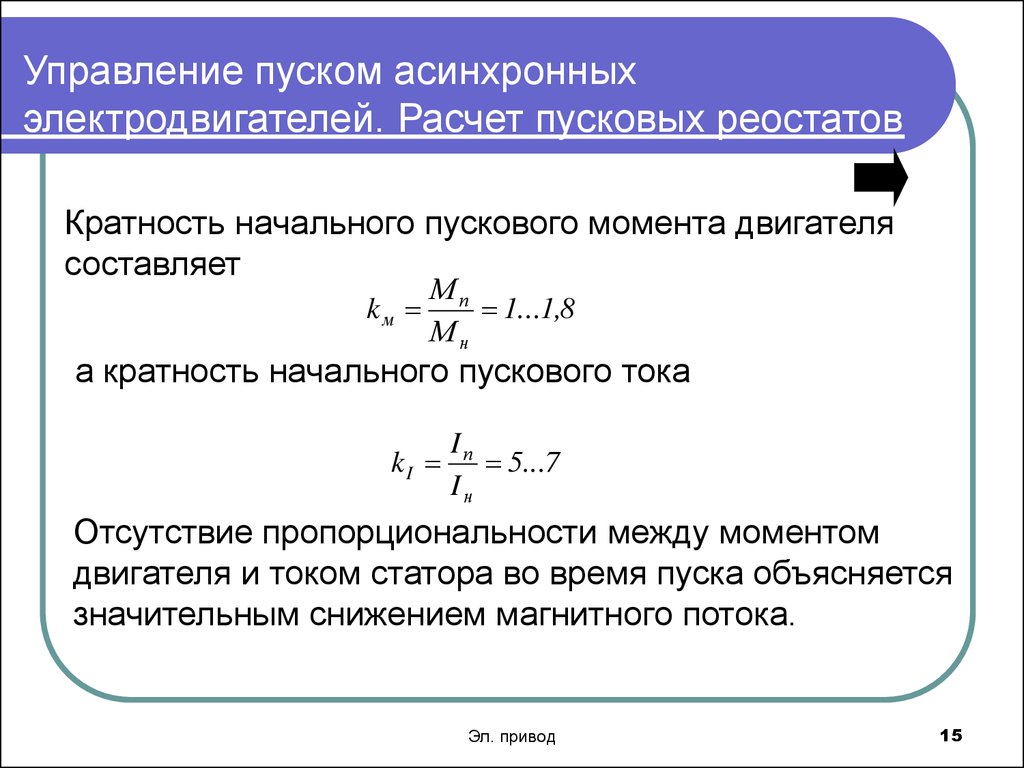 Для крановых и металлургических:
Для крановых и металлургических: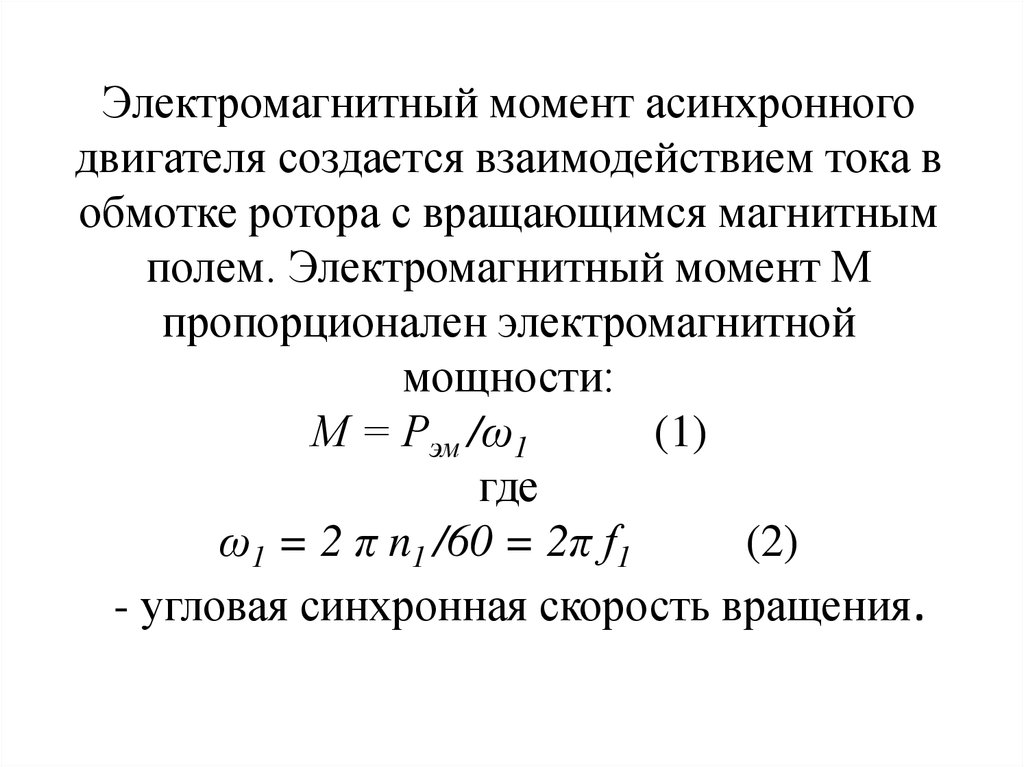
 Именно момент вращения определяет мощность Вашего двигателя. Измеряется в ньютонах на метр или в килограмм-силах на метр.
Именно момент вращения определяет мощность Вашего двигателя. Измеряется в ньютонах на метр или в килограмм-силах на метр.
 Номинальное количество оборотов двигателя не совпадает с реальным. Точное количество оборотов вы сможете найти, зная маркировку, в таблице выше.
Номинальное количество оборотов двигателя не совпадает с реальным. Точное количество оборотов вы сможете найти, зная маркировку, в таблице выше. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.
Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
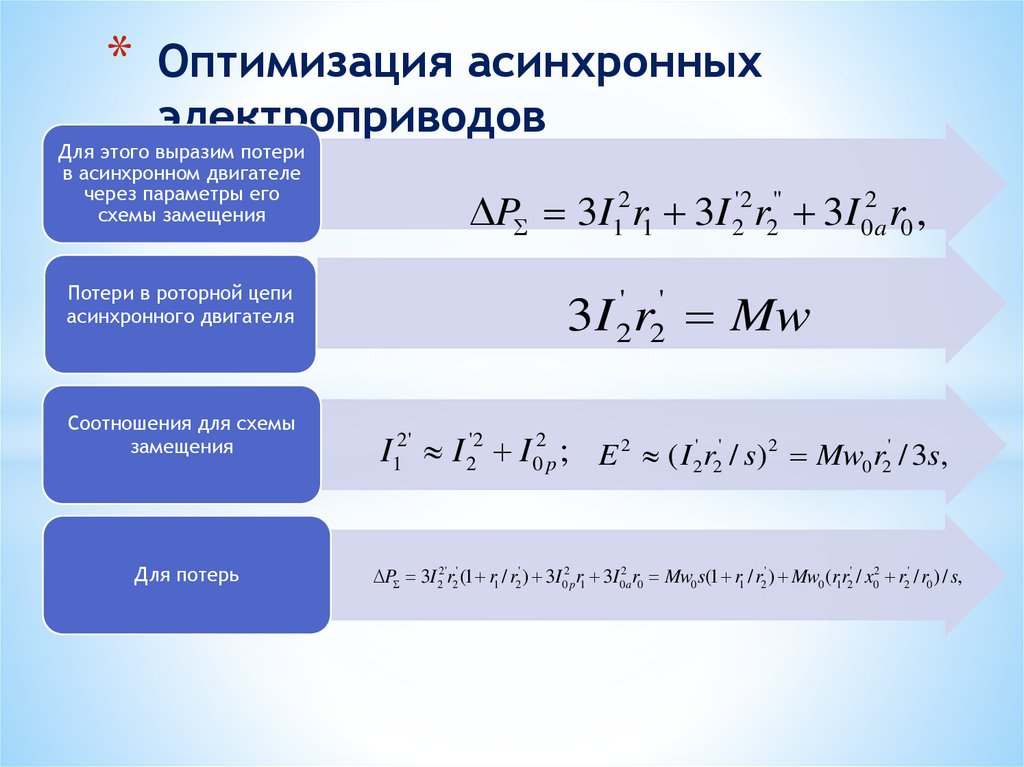 Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.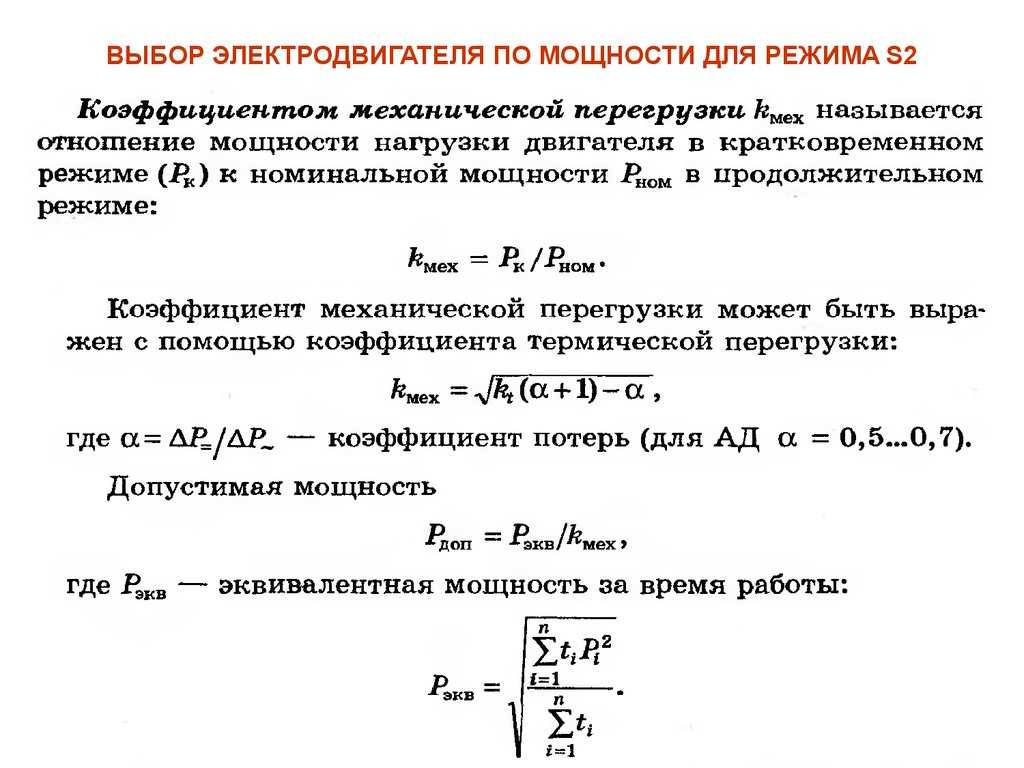 п. д. η от полезной мощности на валу
п. д. η от полезной мощности на валу Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Φ несколько уменьшится. Увеличение
Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Φ несколько уменьшится. Увеличение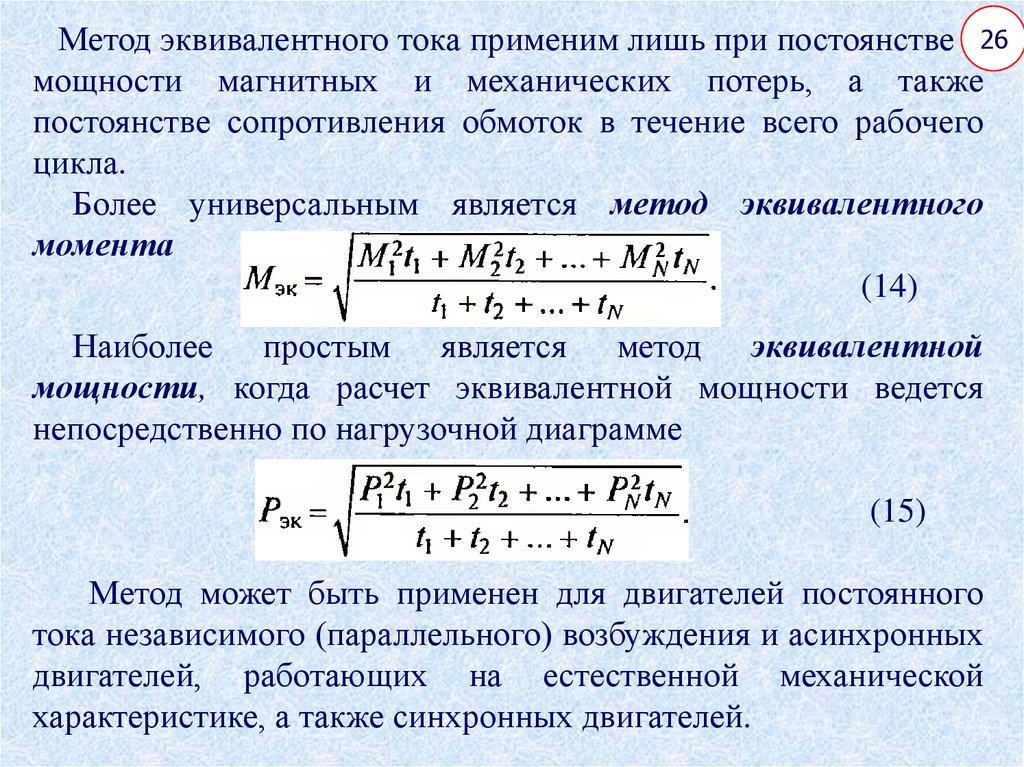
 е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (I
е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (I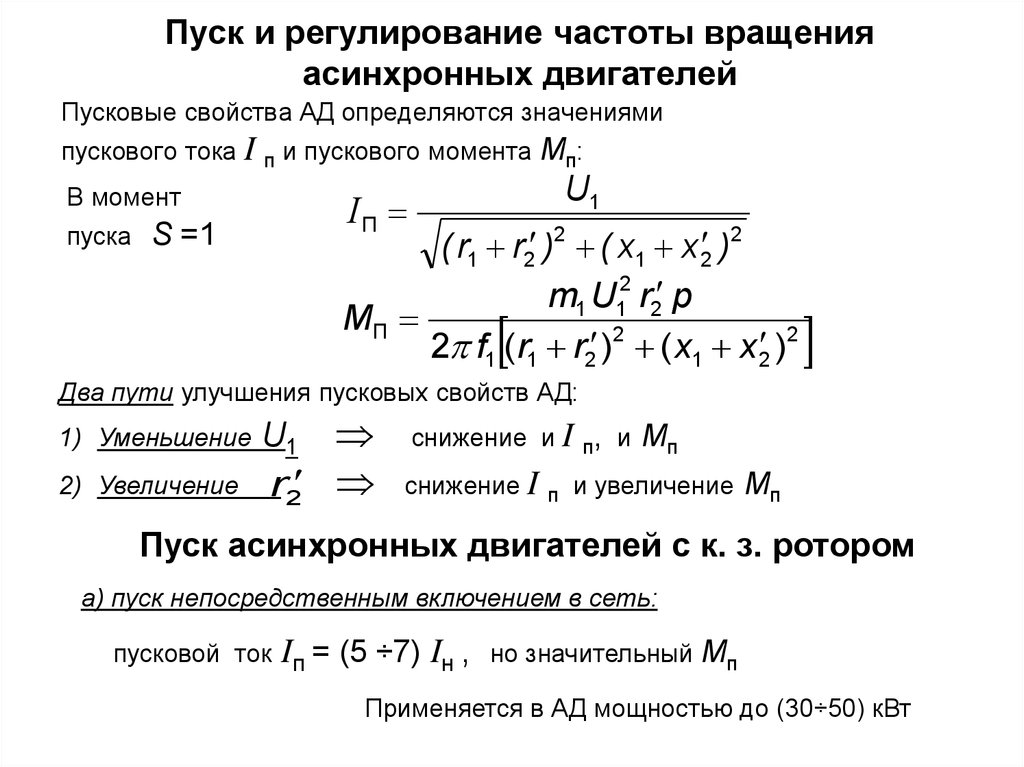 е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и при перегрузках. Эти двигатели широко используются в транспортных и подъемных устройствах. При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения. Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво. Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения. С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем в двигателях параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения.
е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и при перегрузках. Эти двигатели широко используются в транспортных и подъемных устройствах. При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения. Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво. Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения. С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем в двигателях параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения.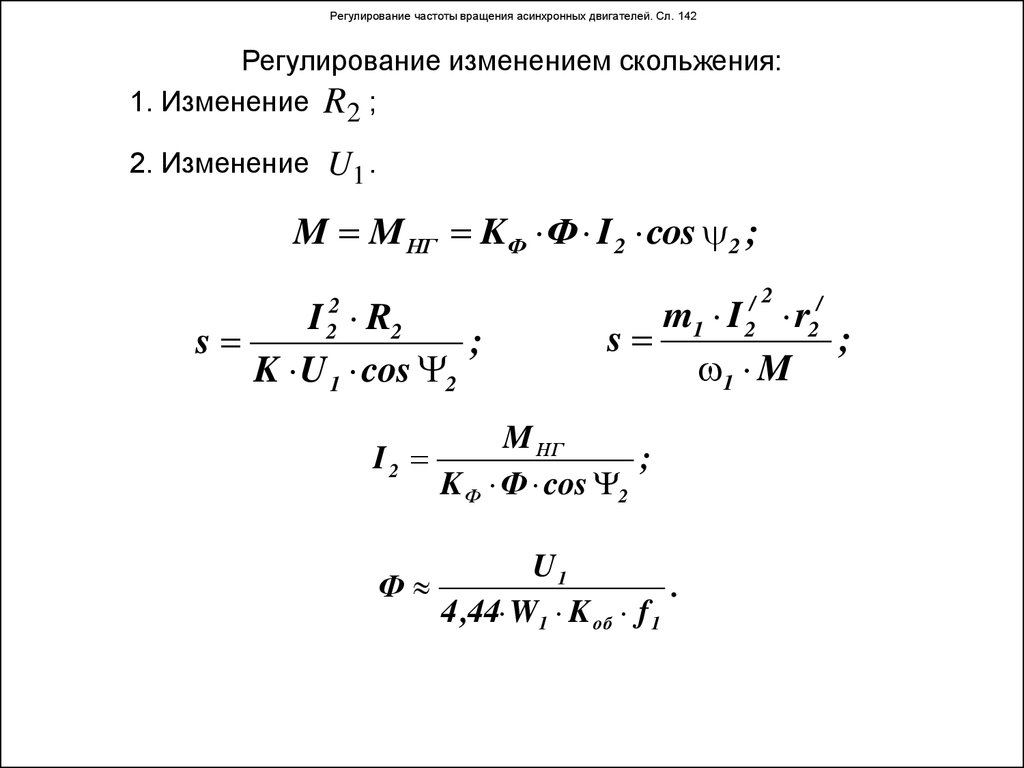 При холостом ходе двигатель смешанного возбуждения не идет в разнос, так как магнитный поток не уменьшается до нуля в результате наличия параллельной обмотки возбуждения. При увеличении нагрузки в двигателях смешанного возбуждения происходит увеличение магнитного потока и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей степени, чем в двигателях последовательного возбуждения.
При холостом ходе двигатель смешанного возбуждения не идет в разнос, так как магнитный поток не уменьшается до нуля в результате наличия параллельной обмотки возбуждения. При увеличении нагрузки в двигателях смешанного возбуждения происходит увеличение магнитного потока и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей степени, чем в двигателях последовательного возбуждения. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.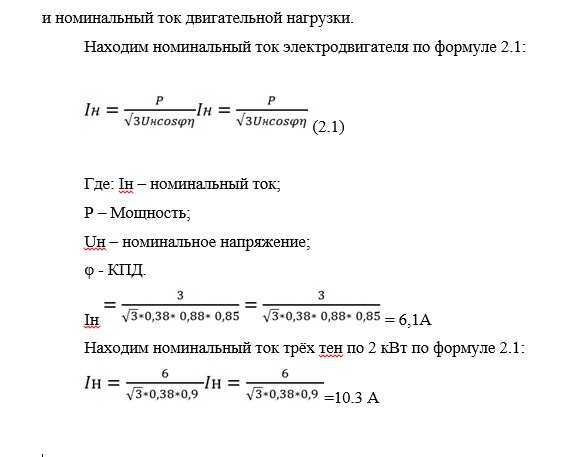
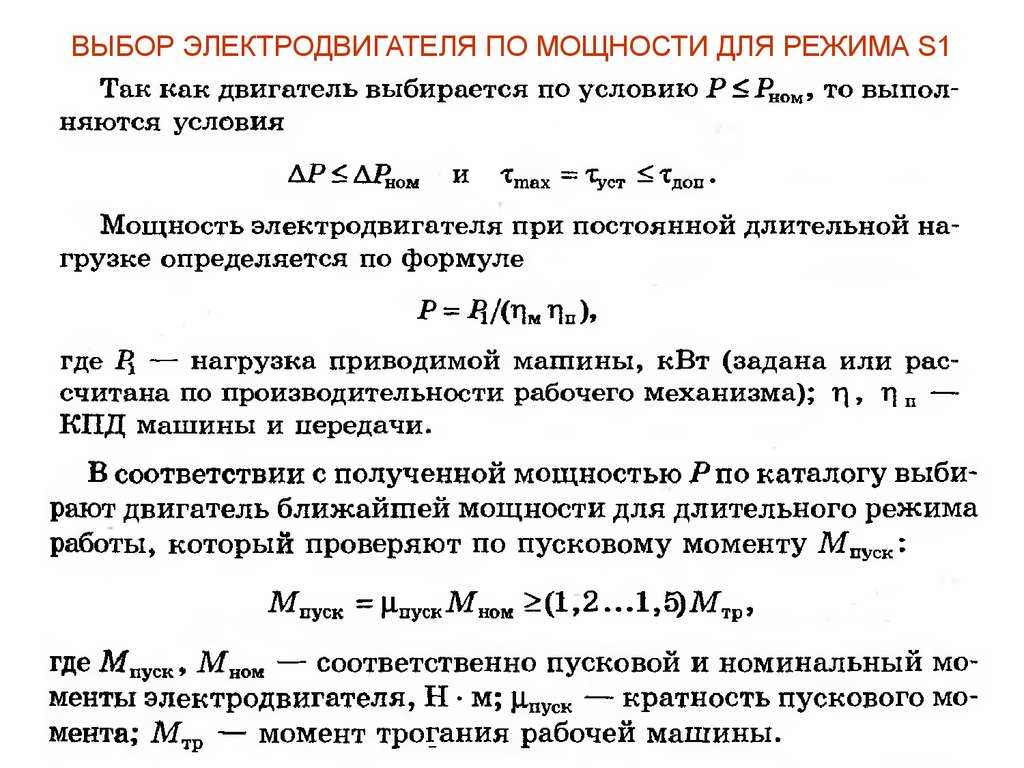
 При такой нагрузке происходит деформация вала ,только не изгиб, который был бы при нулевой длине плеча, а скручивание, при котором отдельные сечения вала не повторяют друг друга, а оказываются повернутыми друг относительно друга на определённые углы, тем большие, чем больше приложенная сила, или чем больше рычаг при одной и той же силе. По этой причине момент называют крутящим. Не следует ожидать, что вы увидите эту закрутку стального вала диаметром, например, 20 мм, нанеся перед нагрузкой на поверхность вала линии, параллельные его оси. Величина закрутки будет в реальности настолько мала, что её непросто измерить даже с помощью специальных приборов, измерителей крутящего момента.
При такой нагрузке происходит деформация вала ,только не изгиб, который был бы при нулевой длине плеча, а скручивание, при котором отдельные сечения вала не повторяют друг друга, а оказываются повернутыми друг относительно друга на определённые углы, тем большие, чем больше приложенная сила, или чем больше рычаг при одной и той же силе. По этой причине момент называют крутящим. Не следует ожидать, что вы увидите эту закрутку стального вала диаметром, например, 20 мм, нанеся перед нагрузкой на поверхность вала линии, параллельные его оси. Величина закрутки будет в реальности настолько мала, что её непросто измерить даже с помощью специальных приборов, измерителей крутящего момента.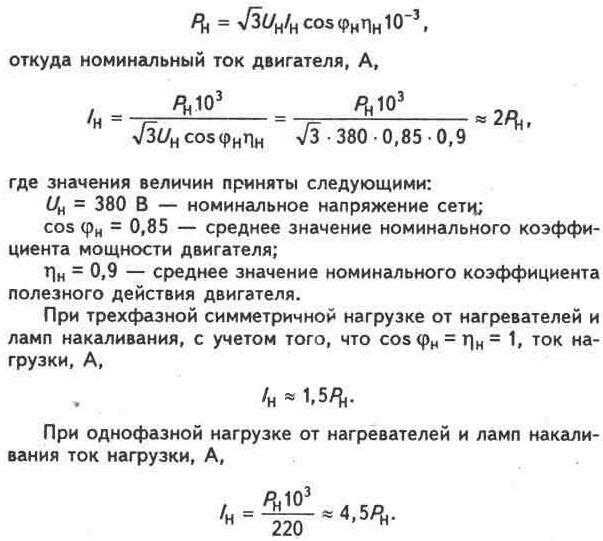 Это угловая скорость вращения вала.
Это угловая скорость вращения вала. Внешними воздействиями на двигатель являются напряжения статора и момент сил сопротивления.
Внешними воздействиями на двигатель являются напряжения статора и момент сил сопротивления. Многим при этом кажется, что мощность останется та же, т.к. скорость не меняется. Но это не так!
Многим при этом кажется, что мощность останется та же, т.к. скорость не меняется. Но это не так!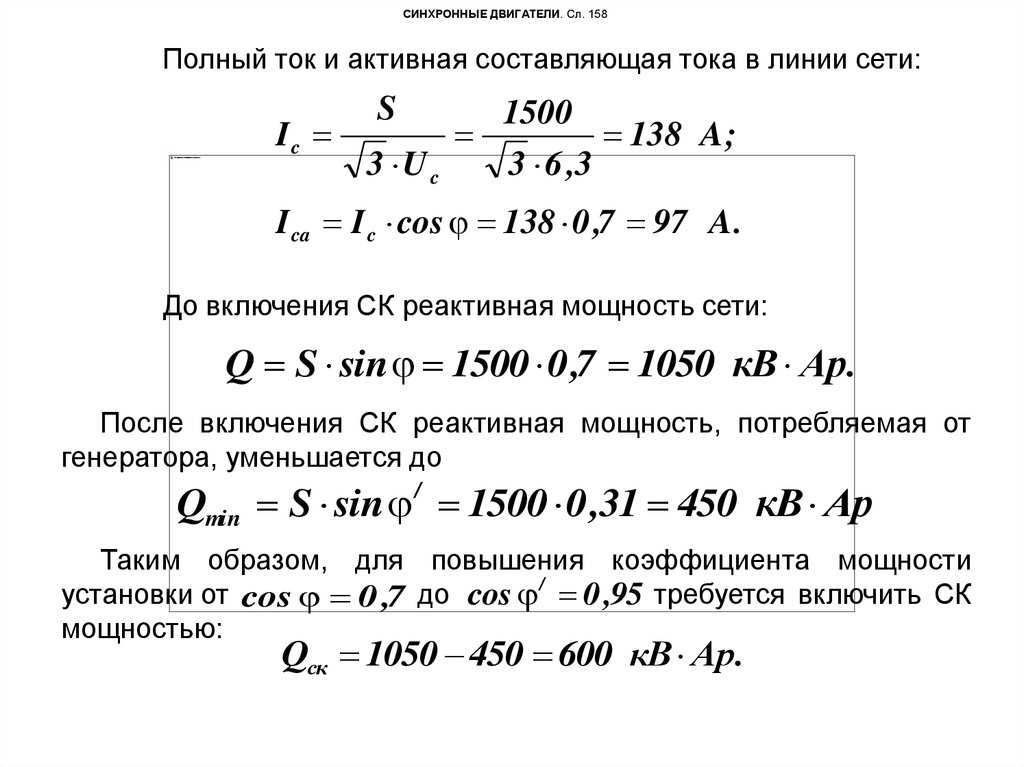 Процесс происходит при температуре в 500 градусов, а коэффициент сжатия находится в районе 10 единиц.
Процесс происходит при температуре в 500 градусов, а коэффициент сжатия находится в районе 10 единиц. Одним из основных технических параметров, которые важно учитывать при подборе, является мощность двигателя..
Одним из основных технических параметров, которые важно учитывать при подборе, является мощность двигателя..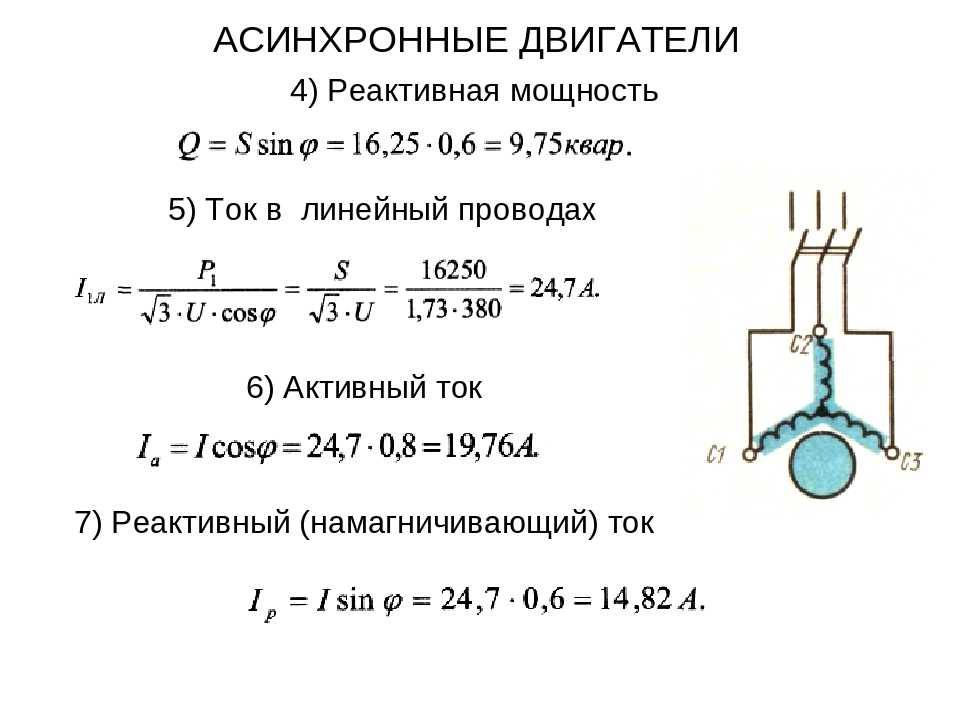
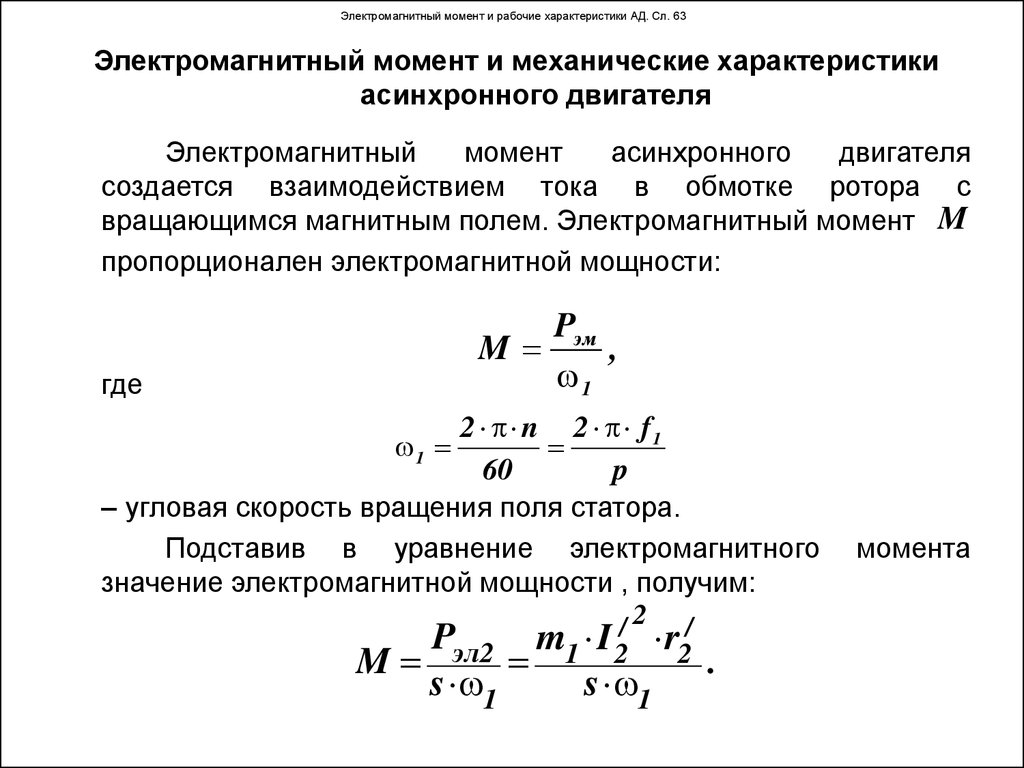
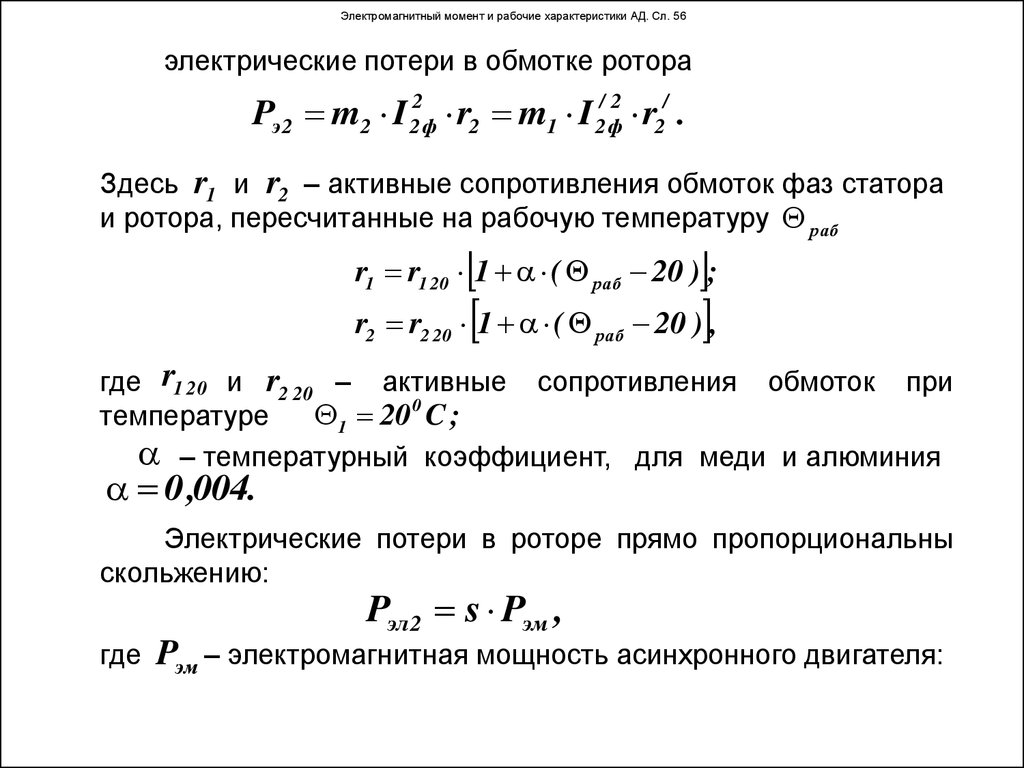 Чем зазор больше, тем ток намагничивания выше. Вследствие этого оптимальным для хорошей работы мотора является небольшой зазор, поскольку он напрямую влияет на КПД двигателя – на потери, на вращающий момент. Чересчур малый зазор, однако, приводит к появлению трения и к ослаблению фиксаторов
Чем зазор больше, тем ток намагничивания выше. Вследствие этого оптимальным для хорошей работы мотора является небольшой зазор, поскольку он напрямую влияет на КПД двигателя – на потери, на вращающий момент. Чересчур малый зазор, однако, приводит к появлению трения и к ослаблению фиксаторов Эти силы и формируют крутящий момент, а он, в свою очередь, вращает ось..
Эти силы и формируют крутящий момент, а он, в свою очередь, вращает ось.. По параметру «принцип работы» классификация следующая
По параметру «принцип работы» классификация следующая
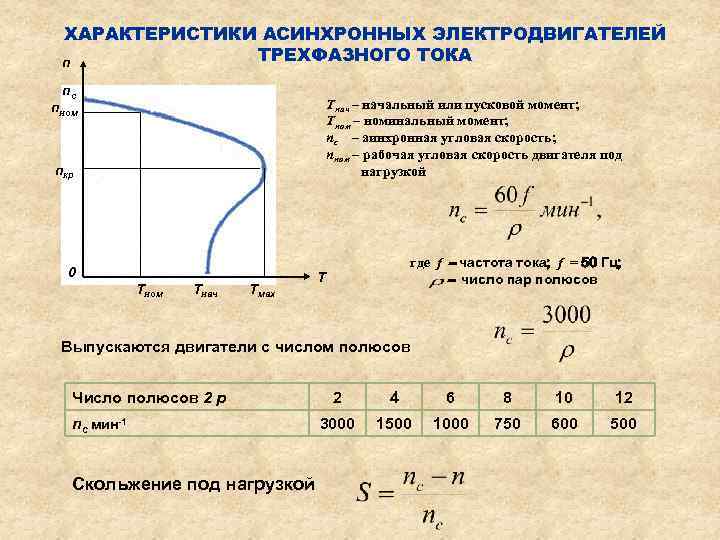
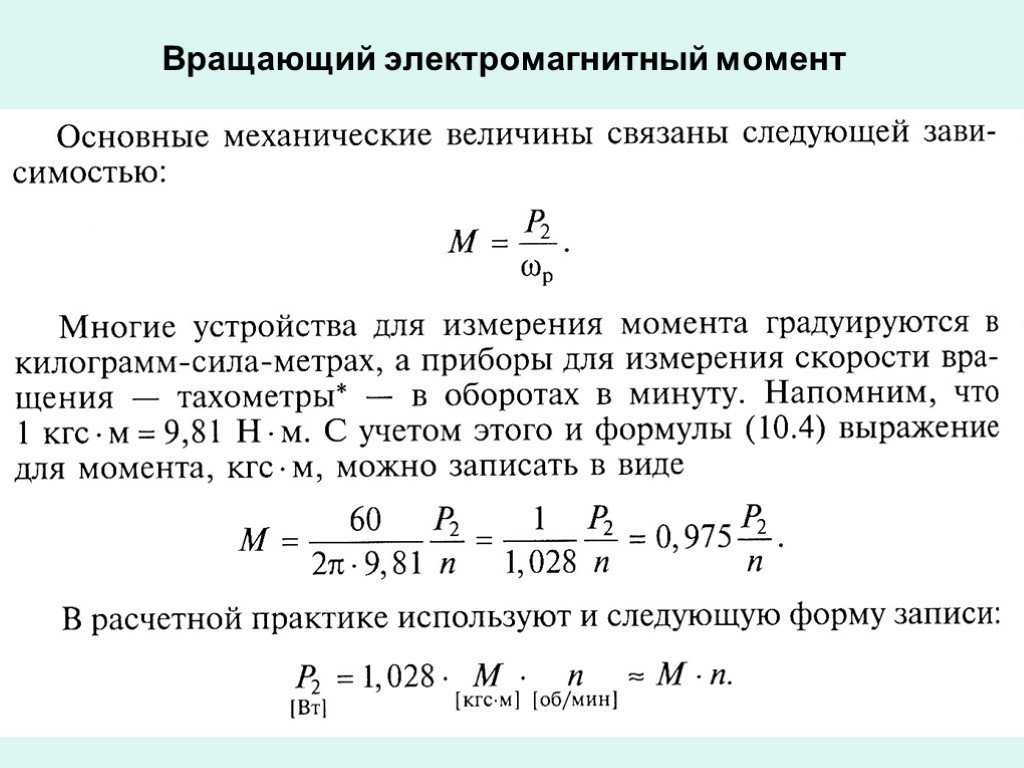 Это дано:
Это дано: :
: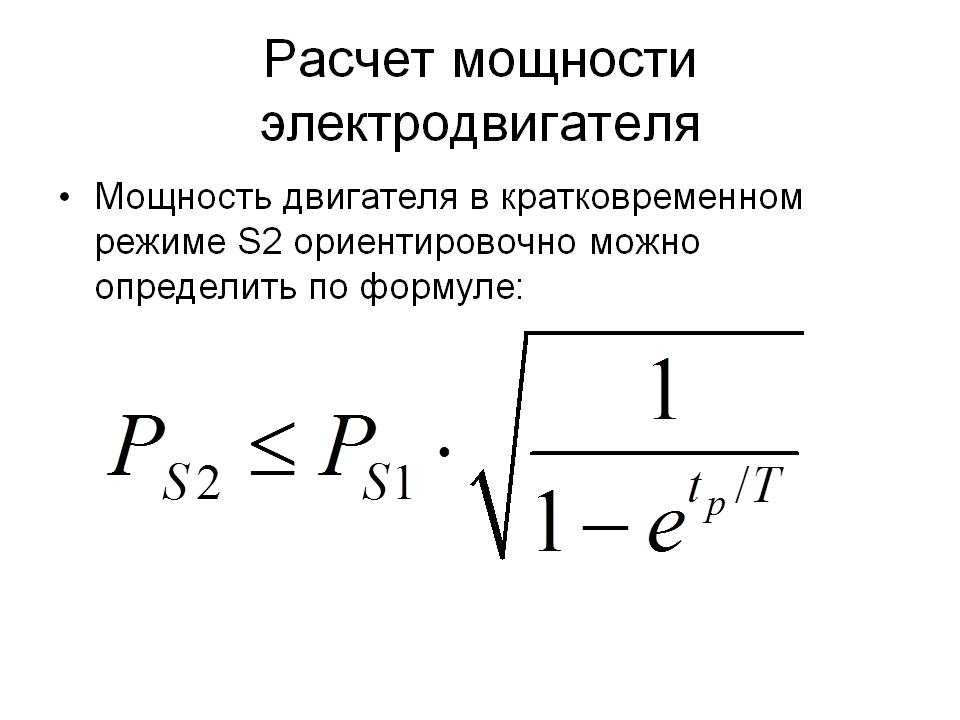 расчеты.
расчеты.