Содержание
Как управлять шаговым двигателем
Когда нам нужны точность и стабильность, мы выбираем шаговый двигатель — степпер. То, как спроектировано это устройство позволяет ему двигаться лишь от одного шага к следующему и фиксироваться в этом положении. Обычный степпер имеет шагов на один полный переворот; если мы при этом укажем моторчику передвинуться на шагов в одном направлении, то он повернётся ровно на градусов. Когда мы даём команду пройти 1 шаг, степпер поворачивается ровно на 1. Степперы есть в принтерах, сканерах, промышленных роботах, 3Д-принтерах и во многих устройствах, где нужна точность в движении. Существует два типа шаговых двигателей: униполярные и биполярные.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Подключение шагового двигателя к Ардуино
- Управление и подключение шагового двигателя к Ардуино (Arduino)
- Управление шаговым двигателем с помощью Android Things
- Схемы управления шаговыми двигателями
- Шаговый электродвигатель
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
- Шаговый двигатель
- Теория управления шаговыми двигателями
- Шаговый двигатель и драйвер для него
- Управление шаговым двигателем. Инструкция
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Обзор копеечной платы управления шаговым двигателем.
Подключение шагового двигателя к Ардуино
Шаговые двигатели являются неотъемлемой частью самых различных электромеханизмов, начиная от бытовой техники и заканчивая производственным оборудованием. Управление шаговым двигателем осуществляется с помощью внешнего оборудования, в качестве которого может выступать как простой контроллер ШД, так и сложная система во главе с ПК, к которому подключается блок управления шаговым двигателем.
Независимо от того, какая схема управления использована, управление шаговым двигателем может осуществляться в одном из трёх режимов:. Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз.
При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза; точки равновесия ротора идентичны полюсам статора.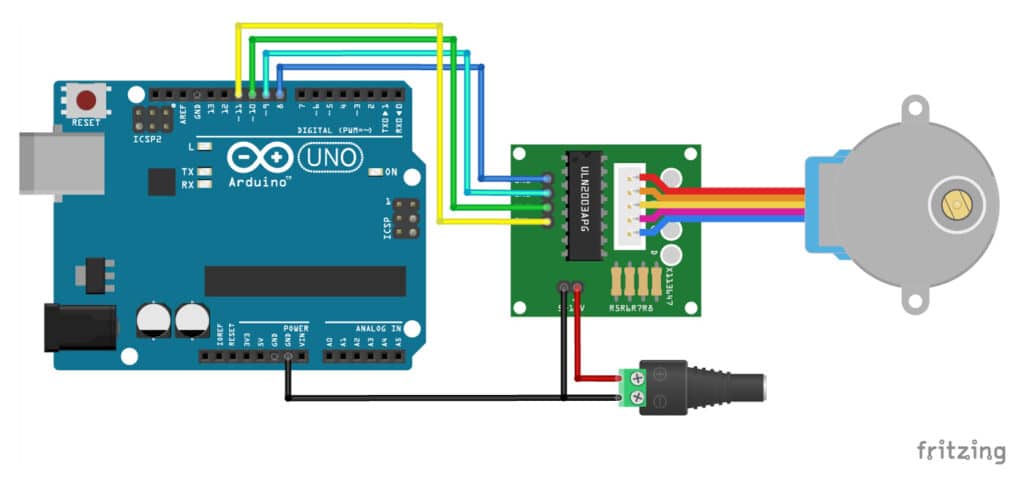 Данный режим имеет недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным — четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз.
Данный режим имеет недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным — четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз.
Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы. Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза.
При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, между шагами включаются сразу обе. Такой режим коммутации очень популярен, однако следует отметить, что при его применение получение полного момента невозможно. Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора.
При работе в таком режиме, как и в полушаговом, работают две фазы, однако токи обмоток в данном случае распределяются неравномерно. В микрошаговом режиме шагового двигателя происходит смещение положения ротора и магнитного поля статора между полюсов. Величина микрошага зависит от конкретного устройства, составляя от трети полного шага и менее. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако коммутация несколько усложняется.
В микрошаговом режиме шагового двигателя происходит смещение положения ротора и магнитного поля статора между полюсов. Величина микрошага зависит от конкретного устройства, составляя от трети полного шага и менее. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако коммутация несколько усложняется.
Если вам необходимо купить шаговый двигатель, контроллер шагового двигателя или блок управления шаговым двигателем в наличии по доступней цене, удобнее всего оформить заказ на нашем сайте. Обратите внимание: используйте только те модели коммутационных устройств, которые совместимы с выбранной вами моделью ШД! Если вы не знаете, как выбрать контроллер для шагового двигателя, проконсультируйтесь у технического специалиста, позвонив по телефону по России звонок бесплатный 8 либо по электронной почте.
Купите шаговый двигатель и коммутатор шагового двигателя в Stepmotor. Все шаговые двигатели, блоки управления и драйверы ШД есть в наличии, отгрузка сразу после оплаты.
Звоните 8 Корзина пуста. Главная Статьи Управление шаговым двигателем. Способы управления шаговым двигателем Независимо от того, какая схема управления использована, управление шаговым двигателем может осуществляться в одном из трёх режимов: — полношаговом; — полушаговом; — микрошаговом. Устройства управления OMDv2 Драйвер шагового двигателя.
В избранное. Товар добавлен в избранное Избранное. Товар уже в избранном Избранное. Устройства управления OMD Драйвер шагового двигателя.
Устройства управления шаговыми двигателями. Advanced Control. Drive Source. Fulling Motor. Lapp Group. Led Effect. Mean Well. Schneider Electric. Ардатовский светотехнический завод АСТЗ. Завод Вентилятор. Кореневский завод НВА. Лайт Аудио Дизайн. Новый Свет. Озёрский кабельный завод. Псковский кабельный завод. Световые Технологии. Тайко Электроникс. Технологии Света.
My Account Search Искать: Поиск.
Управление и подключение шагового двигателя к Ардуино (Arduino)
Электродвигатели преобразуют электрическую энергию в энергию механическую, а что касается шаговых двигателей, то они преобразуют энергию электрических импульсов во вращательные движения ротора. Движение, порождаемое действием каждого импульса, начинается и повторяется с высокой точностью, благодаря чему шаровые двигатели являются эффективными приводами для устройств, требующих точного позиционирования. Шаговые двигатели на постоянных магнитах включают в себя: ротор с постоянными магнитами, обмотки и магнитопровод статора. Возбуждаемые обмотки создают магнитные северный и южный полюса, как показано на рисунке. Движущееся магнитное поле статора вынуждает ротор все время выравниваться вслед за ним. Это вращающееся магнитное поле можно настраивать, управляя последовательным возбуждением катушек статора, приводящих ротор во вращение.
Движение, порождаемое действием каждого импульса, начинается и повторяется с высокой точностью, благодаря чему шаровые двигатели являются эффективными приводами для устройств, требующих точного позиционирования. Шаговые двигатели на постоянных магнитах включают в себя: ротор с постоянными магнитами, обмотки и магнитопровод статора. Возбуждаемые обмотки создают магнитные северный и южный полюса, как показано на рисунке. Движущееся магнитное поле статора вынуждает ротор все время выравниваться вслед за ним. Это вращающееся магнитное поле можно настраивать, управляя последовательным возбуждением катушек статора, приводящих ротор во вращение.
Простой Arduino-код для проверки шагового двигателя. //простое подключение.
Управление шаговым двигателем с помощью Android Things
В статье рассматриваются типы шаговых двигателей, особенности их применения и схемы несложных устройств управления, позволяющие оценить возможности и освоить этот тип двигателей на практике. Статья написана на основании опыта автора по использованию шаговых двигателей в робототехнике.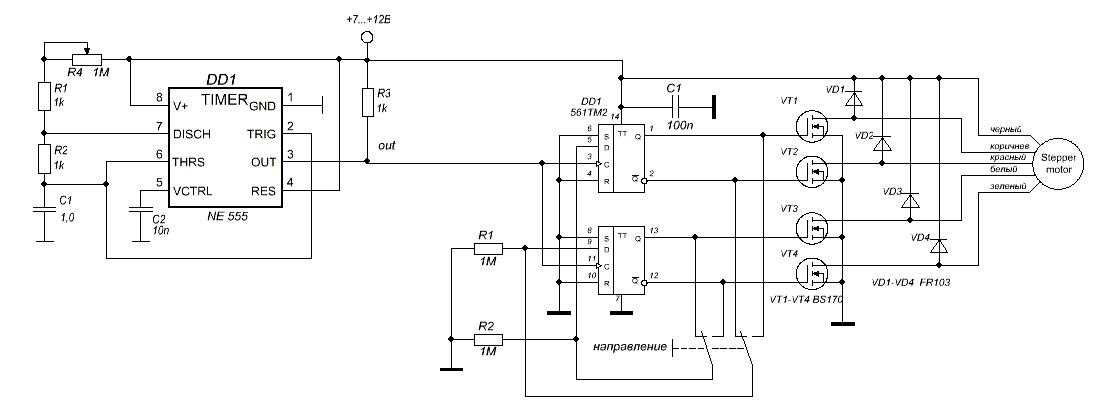 А именно для систем синхронной связи на постоянном токе. Скорость вращения шагового двигателя определяется только частотой следования импульсов управления. Для устройств на основе шаговых двигателей, как правило, не требуется концевых выключателей или каких-то конечных сенсоров. При этом подсчитываются импульсы ЭДС, генерируемые обмоткой двигателя при вращении его ротора внешней силой. Таким образом, момент, развиваемый двигателем, зависит только от параметров обмоток. Статор гибридного двигателя также имеет зубцы, обеспечивая большее количество эквивалентных полюсов, на которых расположены обмотки. В униполярном двигателе рис.
А именно для систем синхронной связи на постоянном токе. Скорость вращения шагового двигателя определяется только частотой следования импульсов управления. Для устройств на основе шаговых двигателей, как правило, не требуется концевых выключателей или каких-то конечных сенсоров. При этом подсчитываются импульсы ЭДС, генерируемые обмоткой двигателя при вращении его ротора внешней силой. Таким образом, момент, развиваемый двигателем, зависит только от параметров обмоток. Статор гибридного двигателя также имеет зубцы, обеспечивая большее количество эквивалентных полюсов, на которых расположены обмотки. В униполярном двигателе рис.
Схемы управления шаговыми двигателями
Это довольно простая схема контроллера шагового двигателя, которая позволит вам осуществить управление шаговым двигателем через параллельный порт вашего компьютера. Шаговый двигатель можно применить в конструировании роботов, в изготовлении печатных плат, использовать в качестве микродрели, автоматической кормушки для аквариумных рыбок и т. Шаговые двигатели отличаются от регулируемых двигателей постоянного тока. Вместо того чтобы вращаться как двигатели постоянного тока, шаговый двигатель совершает дискретное вращение под воздействием серии импульсов.
Шаговые двигатели отличаются от регулируемых двигателей постоянного тока. Вместо того чтобы вращаться как двигатели постоянного тока, шаговый двигатель совершает дискретное вращение под воздействием серии импульсов.
Я совершенно новый для шаговых двигателей, и я изо всех сил пытаюсь контролировать шаговый двигатель с Android Things. У меня есть программа Arduino для управления шаговым двигателем Nema 23, который подключен к драйверу M
Шаговый электродвигатель
Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения шаги ротора. Первые шаговые двигатели появились в х годах XIX века и представляли собой электромагнит, приводящий в движение храповое колесо. За одно включение электромагнита храповое колесо перемещается на величину зубцового шага храпового колеса. Храповые шаговые двигатели и в настоящее время находят довольно широкое применение [1]. Конструктивно шаговые электродвигатели состоят из статора , на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого или из магнито-твёрдого материала.
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
Проблема эффективного управления шаговым двигателем долгое время не позволяла шаговому двигателю получить широкое распространение в промышленном оборудовании. В последние годы многие ведущие производители оборудования более серьезно обратили свое внимание на шаговые двигатели как альтернативную замену традиционно применяемым асинхронным двигателям. Большую роль в этом сыграло то, что на рынке начали появляться высокоэффективные драйвера для управления шаговым двигателем. Модель драйвера шагового привода ШД предназначена для управления шаговым двигателем в пошаговом режиме. Модель драйвера шагового привод ШД предназначена для управления шаговым двигателем в режиме свободного хода, то есть режим бесконтактного двигателя постоянного тока саморазгонный режим. Основные технические характеристики моделей ШД и ШД — управление по трем проводам; — питание — постоянный или переменный ток; — диапазон питающих напряжений от 20 В до 40 В; — потребляемый ток не более 1,75 А модель ШД или не более 3 А модель ШД ; — пусковой крутящий момент при использовании шагового двигателя ДШР Выполнены оба драйвера на основе микропроцессора с внутренним однократно программируемым ПЗУ. Микропроцессор обслуживают: блок питания, блок сброса, блок аварийного сброса, блок анализа токов обмоток, блок анализа положения ротора.
Микропроцессор обслуживают: блок питания, блок сброса, блок аварийного сброса, блок анализа токов обмоток, блок анализа положения ротора.
Доброго времени суток. Стоит задача управление шаговым двигателем ( серво-двигателем) с установленным в него энекодером.
Шаговый двигатель
Форум Список пользователей Все разделы прочитаны Справка Расширенный поиск. Показано с 1 по 5 из 5. Тема: Управление шаговым двигателем с энкодером с помощью ПЛК
Теория управления шаговыми двигателями
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения. Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов.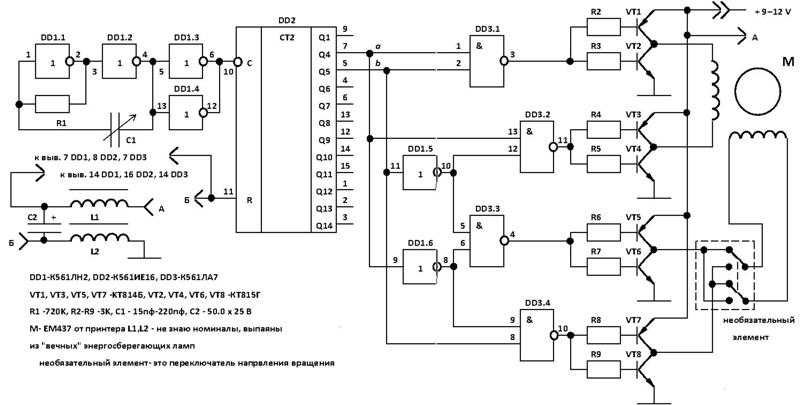
Материал перевел и подготовил RA3TOX сайт «Радиофанат» В данной статье описывается простой способ ручного управления четырехполюсным однополярным шаговым двигателем. Для этого необходим галетный переключатель, восемь недорогих выпрямительных диодов и несколько других компонентов.
Шаговый двигатель и драйвер для него
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Шаговый двигатель — это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах.
Управление шаговым двигателем. Инструкция
Предшественником шагового двигателя является серводвигатель.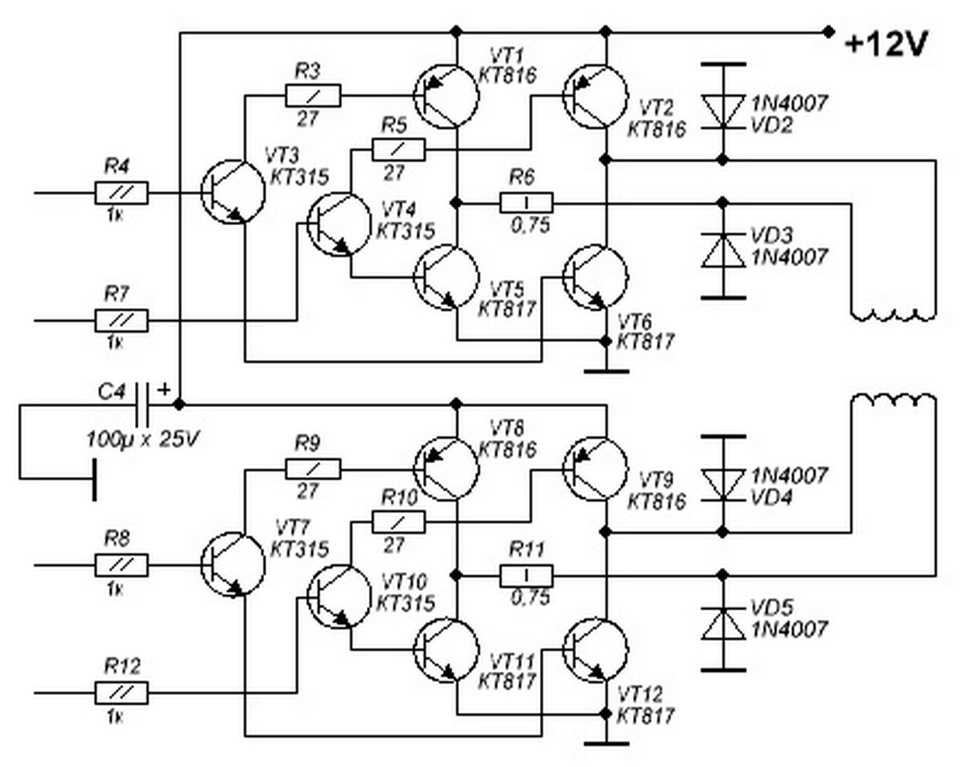 Шаговые импульсные двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода сервопривода разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства меньше элементов и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Шаговые импульсные двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода сервопривода разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства меньше элементов и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Что такое шаговый двигатель и как им управлять
Шаговый двигатель – это устройство, преобразующее электрическую энергию в механическую. При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
Каждый шаг представляет собой угол, величина которого зависит от устройства соответствующего двигателя. Кроме того, величиной угла можно управлять.
Шаговые двигатели используются в самых разных областях: в автомобилестроении, приборостроении, везде, где требуется механическое движение с высокой точностью позиционирования.
Популярно использование шагового двигателя и в точной робототехнике.
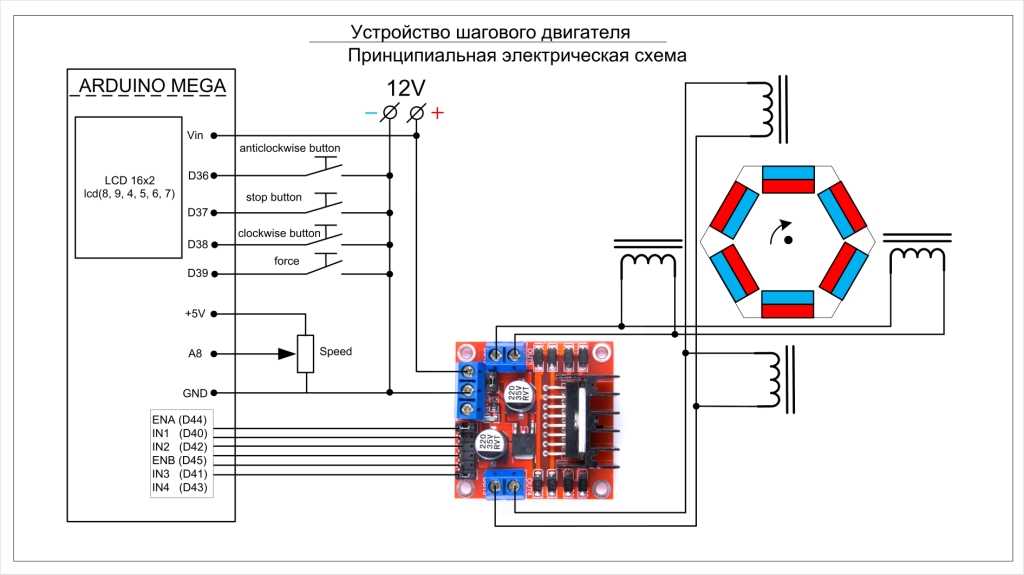
Устройство шагового двигателя
Как любой мотор, шаговый двигатель состоит из статора и ротора. Обмотки шагового двигателя выполнены на статоре. Они не зависят друг от друга. На роторе установлены постоянные магниты. Когда ток подается на одну из обмоток, ротор поворачивается на соответствующий угол, после чего останавливается. Подача тока на следующую обмотку опять вызывает поворот ротора, за которым следует остановка. Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Таким образом, устройство шагового двигателя позволяет контролировать угол поворота ротора и частоту его вращения.
В отличие от сервопривода никакого датчика позиционирования в устройстве шагового двигателя не предусмотрено.
Если есть желание разобрать двигатель, чтобы познакомиться с его устройством, то это плохая идея. Система ротор-статор представляет собой замкнутый магнитопровод, который при вмешательстве теряет ряд своих свойств, что может негативно сказаться на работе двигателя. Поэтому разбирать двигатель категорически не рекомендуется.
Система ротор-статор представляет собой замкнутый магнитопровод, который при вмешательстве теряет ряд своих свойств, что может негативно сказаться на работе двигателя. Поэтому разбирать двигатель категорически не рекомендуется.
Принцип работы шагового двигателя
Перемещение шагового двигателя состоит из многочисленных шагов. Управление шаговым двигателем осуществляется с печатной платы, питание может подаваться от источника постоянного тока.
Отличие шагового двигателя от сервопривода
В отличие от сервопривода шаговый двигатель перемещается по шагам. Благодаря этому с его помощью можно совершать очень точные движения. Угол поворота выходного вала сервопривода обычно ограничен диапазоном от 0°C до 180°C. У шагового двигателя такого ограничения нет. Он может вращаться непрерывно. Однако управлять шаговым двигателем сложнее, чем сервоприводом.
Основные технические характеристики шагового двигателя
Крутящий момент — механическая характеристика шагового двигателя. Чем выше крутящий момент, тем лучше способность двигателя преодолевать возникающее при вращении сопротивление.
Чем выше крутящий момент, тем лучше способность двигателя преодолевать возникающее при вращении сопротивление.
Удерживающий момент – это момент блокировки ротора, когда шаговый двигатель находится под напряжением, но вращения не происходит.
Стопорный момент (тормозящий момент) нужен, чтобы при совершении шага происходила фиксация ротора в конечной позиции. При отсутствии стопорного момента без поданного питания происходило бы проворачивание.
Номинальное напряжение – зависит от индуктивности двигателя. Чем выше индуктивность, тем выше требуется напряжение.
Номинальный ток – подается на обмотки шагового двигателя. Измеряется в Амперах.
Угол полного шага – способность двигателя совершать перемещение при одном шаге, указывается в градусах.
Момент инерции ротора – влияет на способность двигателя к разгону. Чем выше момент инерции, тем хуже разгон мотора.
Чем выше момент инерции, тем хуже разгон мотора.
Длина двигателя – длина корпуса без вала.
Типы шаговых двигателей
По строению различают следующие типы шаговых двигателей:
Шаговый двигатель с постоянным магнитом. Постоянный магнит такого двигателя выполнен в виде диска. Он расположен на роторе, и создает крутящий момент за счет притяжения и отталкивания обмотки на статоре.
Шаговый двигатель с переменным магнитным сопротивлением. Такой шаговый двигатель не имеет постоянного магнита. На его роторе расположено зубчатое колесо из специального металла. Крутящий момент невысокий, но зато отсутствует стопорящий момент.
Гибридный шаговый двигатель. Представляет собой сочетание двух вышеперечисленных видов двигателей. Для гибридных двигателей характерна очень маленькая величина шага, в результате чего они способны достигать максимальной точности. Однако стоимость таких двигателей достаточно высока.
Однако стоимость таких двигателей достаточно высока.
По типу обмотки шаговый двигатель может быть униполярным и биполярным.
Преимущества шаговых двигателей
• Главное преимущество шагового двигателя – это точность величины шага.
• Шаговый двигатель может быть быстро запущен и также быстро остановлен. Для выполнения этих действий требуется минимальное время.
• Обладает высокой надежностью. Стабильная работа при высоких нагрузках.
• Нет необходимости в датчиках или других элементах, обеспечивающих обратную связь. Позиционирование полностью определяется поступающими импульсами.
• Большой диапазон скоростей, в том числе возможность достижения низких скоростей.
• Доступная цена.
• Простота в установке и использовании.
Подключение шагового двигателя к печатным платам Arduino
Доступная цена шаговых двигателей и их точная эффективная работа сделали такие двигатели востребованным компонентом в любительской робототехнике. Для реализации различных творческих проектов шаговые двигатели подключатся к программируемому контроллеру Arduino. Такое подключение выполнить достаточно просто.
Для реализации различных творческих проектов шаговые двигатели подключатся к программируемому контроллеру Arduino. Такое подключение выполнить достаточно просто.
Обычно шаговый двигатель имеет от 4 до 6 проводов для подключения. Если у шагового двигателя четыре провода, то это биполярный двигатель. У биполярного двигателя два провода подключаются к одной обмотки, два – к другой.
Шесть проводов имеет униполярный двигатель. При этом два провода подключаются к концам каждой обмотки, а один – к ее середине. Эти провода подключаются к заземлению.
В униполярном двигателе за счет способа его подключения скорость вращения выше, но меньше крутящий момент. Если требуется увеличить крутящий момент, то из униполярного двигателя всегда можно сделать биполярный. Для этого просто не нужно подключать дополнительные провода.
При этом для контроллера не имеет значение, какой способ подключения выбран. В обоих случаях управление производится через два выхода для каждой обмотки.
В обоих случаях управление производится через два выхода для каждой обмотки.
Способ подключения выбирается в зависимости от того, что является в приоритете: скорость вращения или крутящий момент.
Нет необходимости задействовать ШИМ-выходы, так как управление двигателем зависит только от подачи тока на обмотки.
ШИМ-выходы используются для полушаговых и микрошаговых режимов. С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем.
Питание шагового двигателя
Рекомендуется использовать внешний источник питания 5-12 В, в противном случае ресурсов платы Arduino может оказаться недостаточно.
Следует всегда помнить, что во время подключения или отключения двигателя на программируемый контроллер не должно подаваться питание! Иначе контроллер может просто сгореть.
Библиотеки и управление шаговым двигателем
Использование библиотеки позволяет упростить управление шаговым двигателем. Среди предлагаемых библиотек можно выделить библиотеку Stepper и Accel Stepper. Библиотеку Stepper не нужно скачивать, она входит в Arduino IDE и подойдет для управления шаговым двигателем в простых проектах, предусматривающих использование лишь одного двигателя. Библиотека Stepper подключается командой #include.
Библиотека Accel Stepper обладает большими возможностями. Например, с ее помощью можно управлять сразу несколькими шаговыми двигателями, а также их работой на низких скоростях. Эта библиотека предусматривает возможность ускорения и замедления. А главное она позволяет добиться плавной работы мотора.
После подключения библиотеки создается объект stepper и указывается, к каким пинам подключаются обмотки. Для этого необходимо задать количество шагов для одного оборота вала.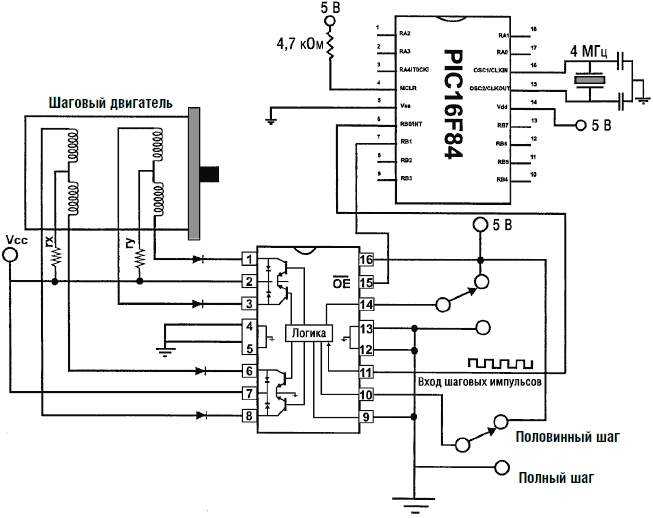
Драйвер
Также для управления шаговым двигателем используется драйвер. Драйвер позволяет управлять мощными двигателями, ток на которые соответственно поступает с внешнего источника питания.
Импульсы, поступающие на двигатель, формирует микроконтроллер. Для усиления этих импульсов и используется драйвер.
Функции драйвера
Прежде всего, драйвер нужен, чтобы обеспечить поступление тока на обмотки статора. Также драйвер отвечает за коммутацию обмоток и выполняет защитные функции. Тип драйвера влияет на мощность на валу двигателя.
На сегодняшний день существует большой выбор драйверов для шаговых двигателей, например, L293, ULN2003, A3967SLB и многие другие.
Возможные сложности
Перегрев шагового двигателя. Рабочая температура двигателя может достигать 80°C, но это еще не означает, что двигатель перегревается. Если температура мотора превышает 80°C, то только тогда можно говорить о перегреве. В случае перегрева первым делом нужно проверить, какой рабочий ток выставлен на драйвере, соответствует ли он номинальному току двигателя. Можно снизить питающее напряжение, но это приведет к снижению крутящего момента, и соответственно скажется на работе двигателя. В крайнем случае, на корпус двигателя можно установить радиатор и/или вентилятор.
Если температура мотора превышает 80°C, то только тогда можно говорить о перегреве. В случае перегрева первым делом нужно проверить, какой рабочий ток выставлен на драйвере, соответствует ли он номинальному току двигателя. Можно снизить питающее напряжение, но это приведет к снижению крутящего момента, и соответственно скажется на работе двигателя. В крайнем случае, на корпус двигателя можно установить радиатор и/или вентилятор.
Пропуск шагов. Это достаточно распространенная неприятность, связанная с работой шаговых двигателей. Причины могут быть разные. Вот некоторые из них.
• Некачественный драйвер. Если драйвер неоригинальный, то он не всегда может справиться с непростым управлением шаговым двигателем.
• Ошибки в настройке драйвера. Например, ошибочно выставленное напряжение.
• Перегрузка двигателя. В этом случае нужно проверить, действительно ли двигатель подходит для тех целей, в которых он используется. Вероятно, нужно снизить скорость двигателя или использовать более габаритную модель.
Вероятно, нужно снизить скорость двигателя или использовать более габаритную модель.
Выбор шагового двигателя
К основным параметрам, по которым производится выбор двигателя, относятся: производитель, габариты двигателя, тип двигателя, ток фазы и индуктивность. Как правило, лучше работают двигатели с меньшей индуктивностью.
Заключение
Шаговые двигатели – эффективное решение, если нужно достичь точного перемещения в пространстве. Они представляют собой бюджетную альтернативу сервоприводу. Благодаря уже созданным библиотекам ими легко управлять. Преимущества шаговых двигателей очевидны, поэтому они являются востребованным продуктом на рынке электронных устройств.
Управление униполярными двигателями в практических решениях
В статье, опубликованной в [1], автором не были в полном объеме раскрыты вопросы, касающиеся схем управления униполярными шаговыми двигателями, и примененные им на практике варианты решений для приводов на основе шаговых двигателей этого типа. Поскольку тема шаговых двигателей вызвала повышенный интерес, а упомянутый вопрос не был освещен достаточно полно, то предлагается его более подробное рассмотрение. Тем более что по опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных.
Поскольку тема шаговых двигателей вызвала повышенный интерес, а упомянутый вопрос не был освещен достаточно полно, то предлагается его более подробное рассмотрение. Тем более что по опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных.
Основное преимущество униполярных шаговых двигателей заключается в простоте систем управления. Они не требуют сложных драйверов и дорогостоящих ИМС. Кроме того, и сами двигатели менее дороги, так как в основном данный тип включения обмоток характерен для двигателей на постоянных магнитах. Все это можно найти в статье автора, опубликованной ранее в [1]. Практическое решение для управления униполярным шаговым двигателем понадобилось при использовании двигателя серии P542-M48 [2], а именно униполярного шагового двигателя P542-M482U с встроенным редуктором G23 (125:1). Поскольку двигатель униполярный, схема его управления, как было указано выше, не содержит ни дорогих ИМС, ни специальных сложных драйверов. Здесь достаточно обычных ключей. Коммутатор включения обмоток выполнен на базе технического решения, опубликованного в [3]. Пример практической схемы управления, разработанной автором статьи, которая пригодна для самых различных применений, приведен на рис. 1.
Здесь достаточно обычных ключей. Коммутатор включения обмоток выполнен на базе технического решения, опубликованного в [3]. Пример практической схемы управления, разработанной автором статьи, которая пригодна для самых различных применений, приведен на рис. 1.
Рис. 1. Схема управления униполярного шагового двигателя с универсальным коммутатором
Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «Шаг», необходимое направление вращения устанавливается через вход «Направление вращения». Оба сигнала имеют логические уровни, и если для их формирования используются выходы с открытым коллектором, то требуются соответствующие резисторы подтяжки (на схеме рис. 1 они не показаны). Временная диаграмма работы коммутатора схемы (рис. 1) приведена на рис. 2.
Рис. 2. Временная диаграмма универсального коммутатора с реверсом (маркеры показывают изменение очередности включения фаз): Q1 D2-2, Q2 D2-2 — верхние две трассы; Q1 D2-1, Q2 D2-1 — нижние две трассы
Как можно видеть, здесь реализован полношаговый режим управления (подробно см. [1]) с перекрытием фаз, то есть один импульс сдвигает ротор двигателя на один шаг, но в некоторый момент (половина длительности импульса) фазы накладываются друг на друга (рис. 2). Если нет необходимости в реверсе, схема коммутатора может быть значительно упрощена (рис. 3), при этом частота вращения остается неизменной, а диаграмма управления остается аналогичной той, которая приведена на рис. 2 (трассы до переключения очередности фаз), но уже без возможности изменения направления вращения двигателя.
[1]) с перекрытием фаз, то есть один импульс сдвигает ротор двигателя на один шаг, но в некоторый момент (половина длительности импульса) фазы накладываются друг на друга (рис. 2). Если нет необходимости в реверсе, схема коммутатора может быть значительно упрощена (рис. 3), при этом частота вращения остается неизменной, а диаграмма управления остается аналогичной той, которая приведена на рис. 2 (трассы до переключения очередности фаз), но уже без возможности изменения направления вращения двигателя.
Рис. 3. Упрощенная схема коммутатора шагового двигателя (без реверса)
Момент вращения устанавливается изменением тока в обмотках двигателя от регулируемого источника напряжения положительной полярности (автором использован импульсный понижающий стабилизатор, выполненный по типовой схеме на стандартной ИМС с опцией внешнего включения). Расчет такого DC/DC-преобразователя можно легко выполнить в интерактивном режиме [4]. Полное отключение двигателя без удержания ротора осуществляется снятием питающего напряжения с обмоток, это легко выполнить через вход выключения преобразователя, задав в [4] при выборе ИМС соответствующую опцию. В авторском варианте применена ИМС LM2675M-ADJ [5]. Остановка с фиксацией ротора, то есть режим удержания, осуществляется подачи напряжения с частотой коммутации (вход «Шаг»), одновременно желательно уменьшить величину питающего обмотки напряжения Vdc по крайней мере вдвое. С этой точки зрения выбор преобразователя с возможностью регулировки выходного напряжения на ИМС, подобной LM2675M-ADJ, является оптимальным. Пример авторского варианта схемы для формирования напряжения питания обмоток шагового двигателя приведен на рис. 4. Такая схема пригодна для запитки шаговых двигателей любого типа.
В авторском варианте применена ИМС LM2675M-ADJ [5]. Остановка с фиксацией ротора, то есть режим удержания, осуществляется подачи напряжения с частотой коммутации (вход «Шаг»), одновременно желательно уменьшить величину питающего обмотки напряжения Vdc по крайней мере вдвое. С этой точки зрения выбор преобразователя с возможностью регулировки выходного напряжения на ИМС, подобной LM2675M-ADJ, является оптимальным. Пример авторского варианта схемы для формирования напряжения питания обмоток шагового двигателя приведен на рис. 4. Такая схема пригодна для запитки шаговых двигателей любого типа.
Рис. 4. Схема запитки шагового двигателя с удержанием и выключением
Схема (рис. 4) обеспечивает подачу двух напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания (формулы, необходимые для расчета выходного напряжения, приведены в [5]). Рабочий режим включается подачей высокого логического уровня на контакт BRAKE (торможение) разъема Х1. Допустимость снижения напряжения питания определяется тем, что момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя момент удержания с редуктором 25:6 равен 19,8 Н·см, а момент вращения всего 6 Н·см. Но при увеличении отношения эта зависимость нивелируется и для двигателей с редукторами с отношением 80 и выше — практически не отличается. Основная выгода этого метода в том, что он позволяет уменьшить общее потребление тока. В нашем случае с 460 до 230 мА, то есть в два раза, а мощность — в четыре, с 5,52 до 1,38 Вт! Как говорится, почувствуйте разницу. Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт ON/OFF разъема Х1. Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах на транзисторах VT1, VT2 нет необходимости.
Допустимость снижения напряжения питания определяется тем, что момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя момент удержания с редуктором 25:6 равен 19,8 Н·см, а момент вращения всего 6 Н·см. Но при увеличении отношения эта зависимость нивелируется и для двигателей с редукторами с отношением 80 и выше — практически не отличается. Основная выгода этого метода в том, что он позволяет уменьшить общее потребление тока. В нашем случае с 460 до 230 мА, то есть в два раза, а мощность — в четыре, с 5,52 до 1,38 Вт! Как говорится, почувствуйте разницу. Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт ON/OFF разъема Х1. Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах на транзисторах VT1, VT2 нет необходимости.
Примечание. В этом варианте применение резисторов подтяжки недопустимо! В качестве дросселя автором использовалась катушка SDR1006-331K (Bourns). Общее питание формирователя напряжения для обмоток двигателя в рассмотренных режимах может быть уменьшено до 16-18 В. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть лучше закладывать номинальный ток схемы питания, равный удвоенному номинальному току обмоток.
Общее питание формирователя напряжения для обмоток двигателя в рассмотренных режимах может быть уменьшено до 16-18 В. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть лучше закладывать номинальный ток схемы питания, равный удвоенному номинальному току обмоток.
Согласно спецификации [2] оптимальным для двигателей серии P542-M48 является шаг с частотой f = (300-500) Гц. Это и будет определять частоту вращения вала, но частота вращения зависит и от конструкции самого двигателя. В нашем случае, без учета редуктора, частота вращения составит:
f×7,5/360=(6,25–10,42) об/с,
где 7,5 — это угол поворота ротора двигателя на один шаг управления, он-то и задан конструктивно. Дальнейшее понижение частоты вращения определяется редуктором.
Частота коммутации обмоток вполне может быть увеличена до 1,5 кГц. Для этого, чтобы компенсировать уменьшение момента вращения, неизбежного с ростом частоты, применяются специальные методы запитки обмоток двигателя.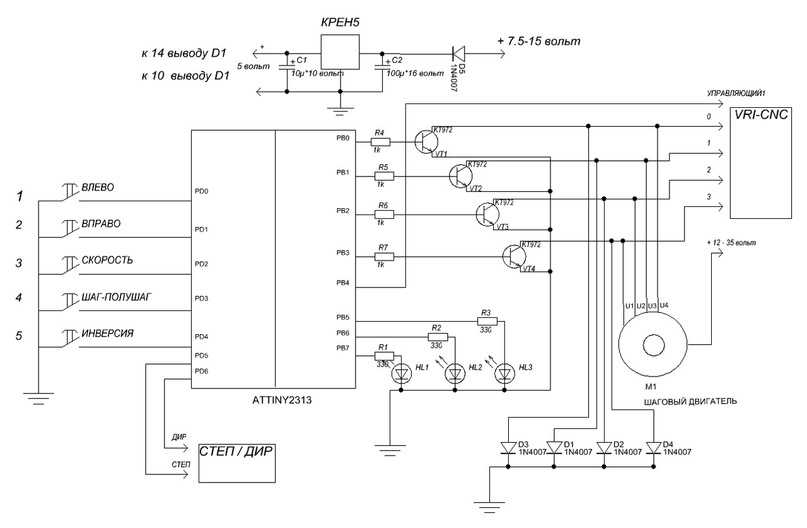 Если внимательно читать спецификацию [2], то можно заметить, что момент вращения двигателя (сноска «Standard Versions:») задан для двух условий, а именно: для условия, обозначенного как L/R, и условия, которое обозначено как L/4R. Можно заметить, что во втором случае частота вращения ротора шагового двигателя, при котором обеспечивается указанный в спецификации момент, заметно выше, а именно 550 вместо 300 Гц. Что это за условия? Проблема обеспечения момента вращения для шагового двигателя заключается в том, что для него не требуется подача напряжения как такового, а необходимо обеспечение тока в обмотках. Именно этот ток создает магнитное поле статора, взаимодействующее с постоянным магнитным полем ротора. Момент на роторе двигателя как раз и определяется взаимодействием этих магнитных полей.
Если внимательно читать спецификацию [2], то можно заметить, что момент вращения двигателя (сноска «Standard Versions:») задан для двух условий, а именно: для условия, обозначенного как L/R, и условия, которое обозначено как L/4R. Можно заметить, что во втором случае частота вращения ротора шагового двигателя, при котором обеспечивается указанный в спецификации момент, заметно выше, а именно 550 вместо 300 Гц. Что это за условия? Проблема обеспечения момента вращения для шагового двигателя заключается в том, что для него не требуется подача напряжения как такового, а необходимо обеспечение тока в обмотках. Именно этот ток создает магнитное поле статора, взаимодействующее с постоянным магнитным полем ротора. Момент на роторе двигателя как раз и определяется взаимодействием этих магнитных полей.
Как известно, ток в индуктивности не может изменяться скачком, а растет по экспоненте до значения Imax = Vdc/R:
I(t)=Imax(1–e—t/t).
Требуемое для этого время определяется постоянной времени цепи:
t=L/R,
где L — это индуктивность обмотки двигателя; R — общее сопротивление в цепи обмотки. Это сопротивление может быть как собственно активным сопротивлением обмотки двигателя RL, так и его суммой с некоторым добавочным резистором. Как видно из приведенной формулы, скорость изменения тока в обмотке обратно пропорциональна ее индуктивности и прямо пропорциональна сопротивлению. Чем быстрее ток достигнет своего максимального уровня:
Imax=Vdc/RL,
где Vdc — это номинальное напряжение запитки обмотки; RL — активное сопротивление в цепи обмотки, — тем скорее установится заданный момент на роторе. Это и определяет скорость вращения вала шагового двигателя в зависимости от частоты коммутации. Таким образом, наша цель — установить (быстро, насколько возможно) ток в обмотке на уровне Vdc/RL.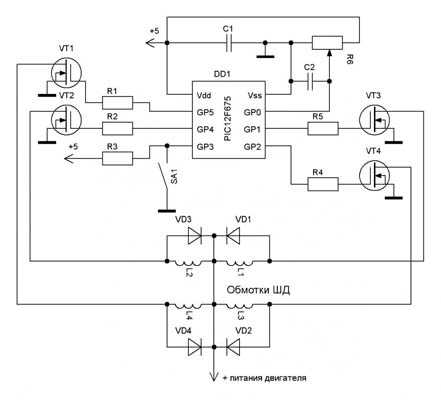
Просто увеличить напряжение на двигателе выше номинального крайне нежелательно, даже если вы уверены в том, что при выбранной скорости вращения ротора ток в обмотках не превысит допустимый. Остановка двигателя при такой подаче питания может привести к его выходу из строя. Уменьшить время установки номинального тока в обмотке можно, увеличив напряжение Vdc лишь на некоторое время, в несколько раз меньшее длительности импульса управления, но это потребует дополнительных ключей, а потому такой способ используется очень редко. Самым простым методом оказывается включение последовательно с обмоткой двигателя дополнительного сопротивления с одновременным кратным увеличением напряжения питания Vdc. Это и ускорит накопление тока в индуктивности, и не приведет к выходу двигателя из строя, так как требование по максимальному току обмотки не будет нарушено. Вот именно на этот режим и «намекает» спецификация [2]. В классической теории применим режим L/5R, но для рассматриваемого типа двигателя спецификация рекомендует режим L/4R.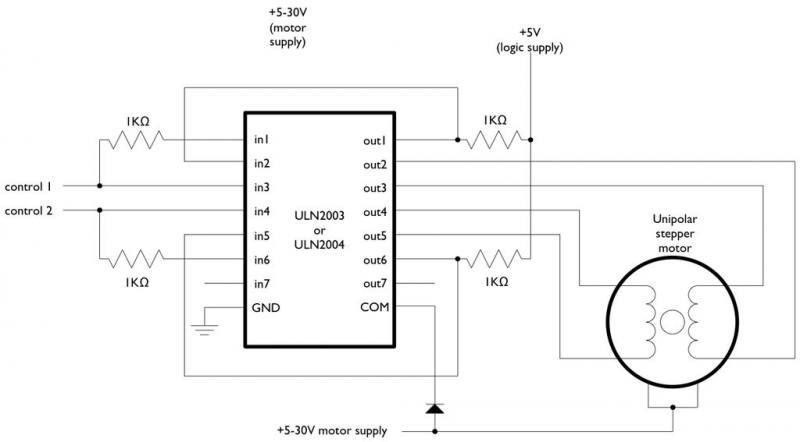 Обращаю внимание, что здесь имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки RL и добавочного резистора номиналом 3RL. Ограничение на использование этого метода накладывает высокая рассеиваемая мощность на добавочных резисторах. В рассматриваемом случае при повышении напряжения питания до 4 Vdc на добавочных резисторах при малых скоростях вращения, и особенно при остановке двигателя, будет рассеиваться мощность до:
Обращаю внимание, что здесь имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки RL и добавочного резистора номиналом 3RL. Ограничение на использование этого метода накладывает высокая рассеиваемая мощность на добавочных резисторах. В рассматриваемом случае при повышении напряжения питания до 4 Vdc на добавочных резисторах при малых скоростях вращения, и особенно при остановке двигателя, будет рассеиваться мощность до:
PR=(3Vcd)2/3RL.
Фактически, с учетом допустимого коэффициента нагрузки, придется использовать добавочный резистор номиналом в 160 Ом с рассеиваемой мощностью 10 Вт. Как видим, эффективность такого решения чрезвычайно низкая. Как выход из положения — использование импульсных стабилизаторов с ограничением максимального тока. Применение данного метода для биполярных шаговых двигателей было рассмотрено в [1], здесь для управления биполярным двигателем использовался драйвер с встроенной функцией нарезки, так называемый чоппинг (от англ. chopping — «нарезка»). В чем его суть? На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс заряда для индуктивности обмоток. После достижения заданной величины тока преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Это решение нельзя назвать дешевым, но его КПД гораздо выше. Сравнение методов управления током в обмотках двигателя приведено на рис. 5.
chopping — «нарезка»). В чем его суть? На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс заряда для индуктивности обмоток. После достижения заданной величины тока преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Это решение нельзя назвать дешевым, но его КПД гораздо выше. Сравнение методов управления током в обмотках двигателя приведено на рис. 5.
Рис. 5. Форма тока в обмотках шагового двигателя при различных вариантах питания [7]
Еще одним важным моментом является правильный выбор диодов, шунтирующих обмотку двигателя (VD1-VD4, рис. 1). Назначение этих диодов — гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, неизбежен выход из строя транзисторных ключей и устройства в целом.
Естественно, и выбор транзистора для ключей управления обмотками должен осуществляться с учетом максимального тока коммутации, а его подключение — предусматривать необходимость заряда/разряда емкости затвора.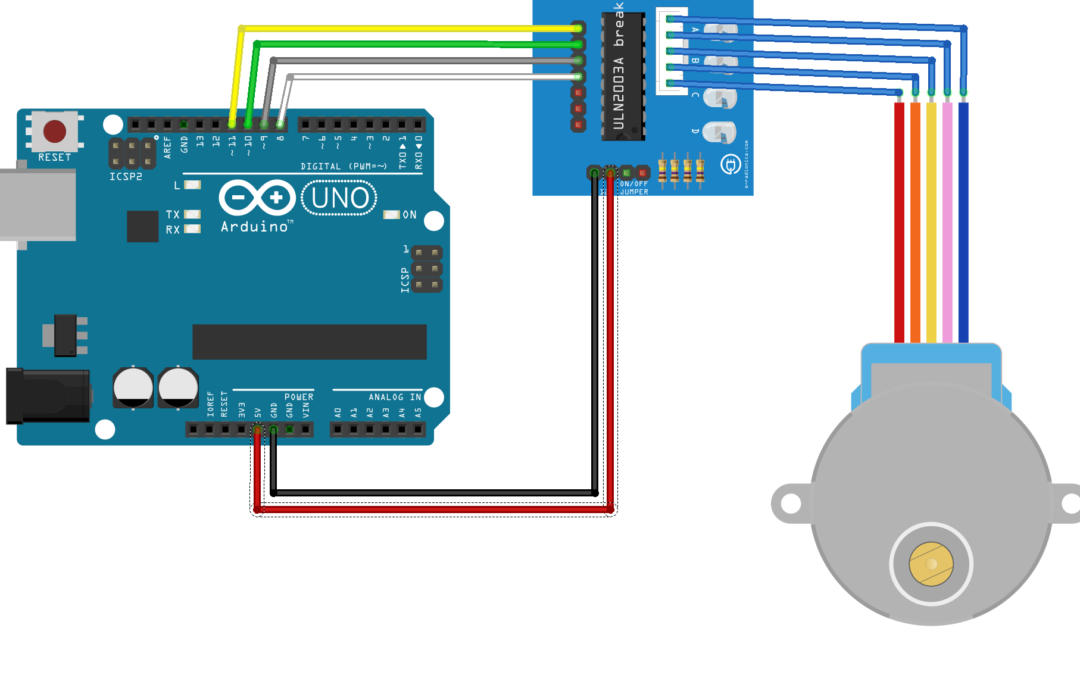 В ряде случаев прямое подключение выходных MOSFET-транзисторов к ИМС коммутатора может быть недопустимым. В этом случае следует выбрать соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с малым током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I = 230 мА ток управления по базе ключа должен составить по крайней мере не менее 15 мА (хотя для нормальной работы ключа нужен ток базы 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем типа 74HC74 недостижим, поэтому потребуются дополнительные драйверы для выходных ключей.
В ряде случаев прямое подключение выходных MOSFET-транзисторов к ИМС коммутатора может быть недопустимым. В этом случае следует выбрать соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с малым током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I = 230 мА ток управления по базе ключа должен составить по крайней мере не менее 15 мА (хотя для нормальной работы ключа нужен ток базы 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем типа 74HC74 недостижим, поэтому потребуются дополнительные драйверы для выходных ключей.
Таким образом, оптимальным вариантом для управления коммутацией обмоток является использование подходящих по току и сопротивлению канала в открытом состоянии Rdc(on) полевых транзисторов с изолированным затвором (MOSFET) с учетом рекомендаций, описанных выше. В авторском варианте были применены транзисторы IRLML2803 с Rdc(on) = 0,25 Ом, допустимой мощностью рассеивания 540 мВ и постоянным током стока 0,93 А при температуре +70 °C. Мощность, рассеиваемая на ключах, выполненных на транзисторах IRLML280, при полной остановке ротора не превысит:
В авторском варианте были применены транзисторы IRLML2803 с Rdc(on) = 0,25 Ом, допустимой мощностью рассеивания 540 мВ и постоянным током стока 0,93 А при температуре +70 °C. Мощность, рассеиваемая на ключах, выполненных на транзисторах IRLML280, при полной остановке ротора не превысит:
PVT< Rdc(on)I2=13,2 мВт.
В большинстве случаев такой оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их полного расчета можно воспользоваться методикой, приведенной, например, в [6].
В завершение еще раз небольшое напоминание: когда речь идет о частоте вращения ротора шагового двигателя, то имеется в виду именно то, о чем говорилось, — вращение ротора самого двигателя без редуктора. При этом необходимо учитывать угол поворота его ротора на один шаг. Для рассматриваемого типа двигателя он составляет 7,5°. Имеются двигатели с углом поворота на один шаг от 18° до 0,9° (чаше 1,8°). Для получения конечного результата необходимо обязательно учитывать этот параметр и коэффициент понижения частоты вращения ротора двигателя соответствующим редуктором. Все нужные параметры для правильного выбора типа двигателя серии P542-M48 приведены в спецификации [2].
Для получения конечного результата необходимо обязательно учитывать этот параметр и коэффициент понижения частоты вращения ротора двигателя соответствующим редуктором. Все нужные параметры для правильного выбора типа двигателя серии P542-M48 приведены в спецификации [2].
Литература
- Рентюк В. Шаговые двигатели и особенности их применения // Компоненты и технологии. 2013. № 10.
- Geared stepper motor P542-M48 series, Mclennan Servo Supplies Ltd. www.mclennan.co.uk
- Rentyuk V. Control stepper motors in both directions // EDN March 18. 2010.
- Рентюк В. Проектирование DC/DC-преобразователей в системе WEBENCH Design Center. Электрик. 2013. № 10.
- LM2675 SIMPLE SWITCHER Power Converter High Efficiency 1A Step-Down Voltage Regulator, Texas Instruments Inc., Rev. June 2005.
- Дьяконов В. П., Маскимчук А. А., Ремнев А. М., Смердов В. Ю. Энциклопедия устройств на полевых транзисторах. М., СОЛОН-Р, 2002.

- Емельянов А. В., Шилин А. Н. Шаговые двигатели: учебное пособие. ВолгГТУ, Волгоград, 2005.

Драйвер шагового двигателя — Полное объяснение
В этой статье мы попытаемся объяснить все важные вещи о драйвере шагового двигателя , которые вам нужно знать.
Содержание
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — это электронное устройство, используемое для управления шаговым двигателем. Сам по себе он обычно ничего не делает и должен использоваться вместе с контроллером типа PoKeys57CNC.
Существует множество различных типов драйверов шаговых двигателей, но в целом все они делают одно и то же — двигают шаговые двигатели.
Нужен ли драйвер для шагового двигателя?
Да. Шаговым двигателям требуются напряжения и/или токи, которые контроллер просто не может создать. Поэтому нам нужно использовать драйвер шагового двигателя. Это электронное устройство преобразует наши инструкции по движению от контроллера в последовательность, в которой обмотка шагового двигателя будет включаться или выключаться, обеспечивая при этом достаточную мощность.
Все это мы, конечно, будем производить с помощью микроконтроллера, управляющего несколькими полевыми транзисторами, но разработка и программирование потребуют времени. К счастью, уже есть существующие решения.
Подводя итог, можно сказать, что контроллеры, как правило, являются чисто цифровыми устройствами с малой выходной мощностью, поэтому мы используем аналоговый силовой каскад в качестве интерфейса между цифровым (контроллер) и механическим (двигатель) миром.
Как работают драйверы шаговых двигателей?
Основной задачей драйвера является генерация соответствующего сигнала из входных данных для перемещения оси двигателя. Наиболее распространенный подход к управлению шаговым двигателем мы называем Н-мостом. Схемы Н-моста состоят из 4 полевых транзисторов с очень низким сопротивлением между контактами стока и истока (R DSon ) в активном состоянии. В общем случае нам нужно как минимум два H-моста, так как двигатель имеет минимум две катушки. При правильной комбинации сигналов на затворе полевого транзистора мы контролируем направление тока через катушку двигателя. Попеременное возбуждение двух обмоток вызывает смещение оси двигателя.
При правильной комбинации сигналов на затворе полевого транзистора мы контролируем направление тока через катушку двигателя. Попеременное возбуждение двух обмоток вызывает смещение оси двигателя.
Движение катушки вперед и назад
Как выбрать драйвер шагового двигателя?
При выборе правильного драйвера для нашей системы нам в первую очередь нужна информация о двигателях, которые мы будем использовать. Это основная важная информация. Мы должны выбрать драйвер в соответствии с мощностью, которую драйвер шагового двигателя может передать двигателю. Например, более крупный двигатель, такой как NEMA 34, имеет более высокое значение удерживающего момента, чем меньший NEMA 17. Вот почему NEMA 34 потребляет больше тока, и нам нужен драйвер с более высокой характеристикой силы тока.
Следующее, что нужно рассмотреть, это то, как и чем мы хотели бы управлять в драйвере. Обычно есть настройки на максимальный ток и микрошаг, о которых мы напишем в отдельной главе этой статьи. У нас может быть возможность настроить драйвер с перемычками или более сложное программное обеспечение, которое в большинстве случаев позволяет пользователю настраивать также другие специальные параметры, такие как параметры затухания, предел защиты от температуры, ток холостого хода и так далее.
У нас может быть возможность настроить драйвер с перемычками или более сложное программное обеспечение, которое в большинстве случаев позволяет пользователю настраивать также другие специальные параметры, такие как параметры затухания, предел защиты от температуры, ток холостого хода и так далее.
Некоторые драйверы мы можем использовать только с контроллером, который генерирует сигналы шага и направления. С другой стороны, другие мы можем вести по разным протоколам связи.
Типы драйверов
Обычно существует два типа драйверов. Драйверы постоянного напряжения (драйверы L/R) и драйверы постоянного тока (драйверы прерывателя).
- драйверы постоянного напряжения (драйверы L/R):
- они дешевле драйверов постоянного тока
- использовать напряжение для создания крутящего момента
- обычно не эффективен
- производительность хуже, чем у драйверов чоппера
- драйверы постоянного тока (драйверы прерывателя):
- дороже
- более сложные схемы
- использовать постоянный ток для создания крутящего момента
- намного лучше по производительности, чем драйверы L/R
Драйверы постоянного тока используются почти всегда, так как существует много доступных ИС, которые обеспечивают гораздо лучшую производительность.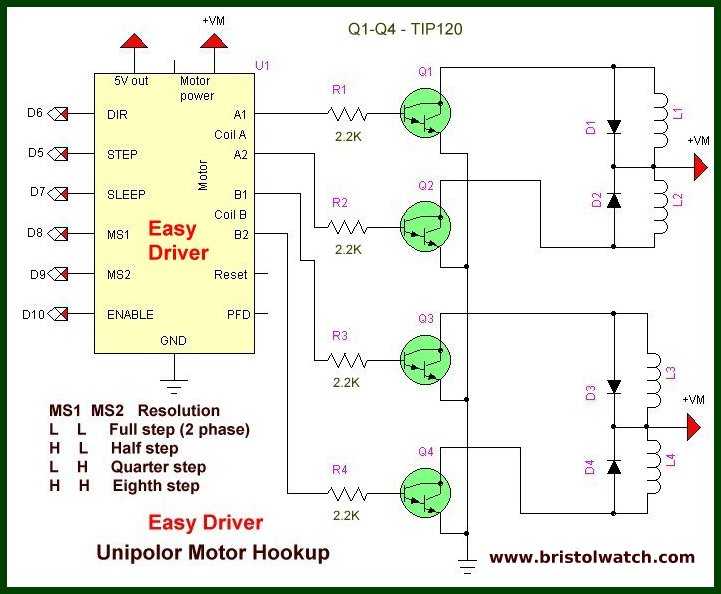 Вы можете найти интегральные схемы, которые уже имеют встроенные полевые транзисторы, они обычно предназначены для более низких токов (до пары А). Поскольку они маленькие, может возникнуть проблема с отводом тепла. Если мы используем внешние полевые транзисторы, максимальный ток ограничивается только характеристиками выбранного полевого транзистора и конструкции печатной платы.
Вы можете найти интегральные схемы, которые уже имеют встроенные полевые транзисторы, они обычно предназначены для более низких токов (до пары А). Поскольку они маленькие, может возникнуть проблема с отводом тепла. Если мы используем внешние полевые транзисторы, максимальный ток ограничивается только характеристиками выбранного полевого транзистора и конструкции печатной платы.
Например, PoStep25-256 использует интегральную схему со встроенными полевыми транзисторами и может обеспечивать ток до 2,5 А, в отличие от PoStep60-256, который использует внешние полевые транзисторы и может обеспечивать до 6 А.
Микрошаговый
Шаговые двигатели двигаются шагами, которые обычно составляют 1,8°, то есть 200 шагов на оборот. Это может быть проблемой, когда нам нужны небольшие движения. Одним из вариантов было бы использование какой-либо трансмиссии, но есть и другой способ — микрошаг. Микрошаг означает, что мы можем иметь более 200 шагов за оборот и, в свою очередь, иметь меньшие движения. Эта опция уже интегрирована в большинство микросхем и может быть настроена простым перемещением перемычки, как на PoStep25-256.
Эта опция уже интегрирована в большинство микросхем и может быть настроена простым перемещением перемычки, как на PoStep25-256.
При управлении шаговыми двигателями с полными шагами выходной сигнал драйвера шагового двигателя выглядит как прямоугольный сигнал и производит грубые движения. Чем больше микрошаг, тем больше выходной сигнал похож на синусоиду, и шаговый двигатель движется более плавно. Но есть в этом и обратная сторона. С увеличением значения микрошага крутящий момент значительно падает, и если значение слишком велико, может случиться так, что двигатель не сможет создать достаточный крутящий момент даже для вращения. Обычно 1/4, 1/8 или даже 1/16 могут обеспечить удовлетворительные плавные движения, при этом создавая достаточный крутящий момент.
На следующем изображении показано, как изменяется выходной сигнал при выборе различных значений микрошага. Вы можете видеть, что выходной сигнал все больше напоминает синусоиду.
Так что же означают эти значения микрошагов?
Микрошаг говорит нам, сколько микрошагов должен сделать степпер, чтобы произвести один полный шаг. Значение 1/1 говорит нам, что степпер должен сделать один микрошаг, чтобы произвести один полный шаг (так что микрошага нет). Значение 1/2 называется половиной шага и говорит нам, что шаговый двигатель должен сделать 2 микрошага для одного полного шага. Это означает, что шаговый двигатель должен сделать 400 шагов за один полный оборот. Значение 1/8 говорит нам о том, что двигатель должен сделать 8 микрошагов за один полный шаг и 1600 шагов за один полный оборот. Тот же принцип применяется ко всем значениям микрошагов.
Значение 1/1 говорит нам, что степпер должен сделать один микрошаг, чтобы произвести один полный шаг (так что микрошага нет). Значение 1/2 называется половиной шага и говорит нам, что шаговый двигатель должен сделать 2 микрошага для одного полного шага. Это означает, что шаговый двигатель должен сделать 400 шагов за один полный оборот. Значение 1/8 говорит нам о том, что двигатель должен сделать 8 микрошагов за один полный шаг и 1600 шагов за один полный оборот. Тот же принцип применяется ко всем значениям микрошагов.
Как управлять драйвером шагового двигателя?
Большинство драйверов шаговых двигателей принимают входные сигналы шага и направления. Это означает, что нам нужно только два сигнала для каждого драйвера. Шаговый сигнал используется для создания шагов и выглядит как ШИМ-сигнал. Каждый импульс означает, что степпер будет двигаться на один шаг (или микрошаг). Сигнал направления используется для указания направления (по часовой стрелке или против часовой стрелки) шагового двигателя. Есть приложения, в которых мы используем шаговый двигатель независимо, поэтому подходящим управлением драйвера является стандартный протокол связи, такой как MODBUS, USB или I2C.
Есть приложения, в которых мы используем шаговый двигатель независимо, поэтому подходящим управлением драйвера является стандартный протокол связи, такой как MODBUS, USB или I2C.
Конфигурация параметров драйвера
Как подключить шаговый двигатель?
Если вы изучали шаговые двигатели, то могли заметить, что у них разное количество соединительных проводов. Наиболее распространены двигатели с двумя обмотками катушки, 4 проводами. На рисунке ниже вы можете увидеть различные варианты подключения двигателей с 4, 6 или 8 проводами.
Заключение
Мы выяснили, что драйвер шагового двигателя необходим, если наша конструкция требует использования шагового двигателя, поскольку контроллер не может выдавать достаточный ток и достаточно высокое напряжение. Существуют разные типы, но драйверы чоппера обеспечивают наилучшую производительность. Кроме того, микрошаг предлагает на первый взгляд отличное решение, но создает проблему снижения крутящего момента. Он по-прежнему чрезвычайно полезен, но мы должны использовать его правильно. Существует множество различных интегральных схем для управления шаговым двигателем, а также множество уже готовых решений, таких как PoStep25-256 и PoStep60-256, которые обеспечивают решение plug and play и просты в использовании.
Существует множество различных интегральных схем для управления шаговым двигателем, а также множество уже готовых решений, таких как PoStep25-256 и PoStep60-256, которые обеспечивают решение plug and play и просты в использовании.
И если вы хотите узнать больше, вот отличная отправная точка.
p.s.: Статья о драйверах шаговых двигателей была SEO-оптимизирована с помощью словенского SEO-фрилансера Seo-Praktik.si.
Кроме того, вы можете проверить некоторые из наших последних блогов и продуктов, которые могут помочь вам улучшить ваши машины или получить некоторые идеи, как сделать их лучше:
- плазменный делитель напряжения (продукт)
- Датчик самонаведения (продукт) и сообщение в блоге о датчике самонаведения,
- Что такое плазменная резка с ЧПУ (блог),
- Драйвер биполярного шагового двигателя — PoStep25-256 — продукт
- Тестер печатных плат — для PoStep25-256 — блог
- 4-я ось для ЧПУ — блог
- Введение в аппаратную электронику ЧПУ — блог
- оборудование для плазменной резки — блог
- что такое плазменная резка с ЧПУ — блог
- что такое плавающая головка для плазменной резки с ЧПУ — блог
- руководство по поиску и устранению неисправностей плазменного резака — блог
- контроль высоты резака — THC
Related Posts
Учебное пособие по PoBlocks — Импульсный движок, пользовательский PoIL. ..
..
В этом учебном пособии по PoBlocks мы опишем, как PoBlocks может…
Подробнее Мы добавили новую функцию в наш популярный универсальный двигатель…
Подробнее
Проверка контактных колец с помощью PoKeys
Проверка контактных колец? Что это должно делать…
Подробнее
Выбор и интеграция шагового двигателя медицинского аппарата —
Мартин Келлингхузен, инженер, разработка продуктов | Нет комментариев
В последнее время почти каждое медицинское устройство, которое я разрабатываю, требует наличия шагового двигателя. После столь частой работы с этими двигателями я хотел бы поделиться тем, что я узнал о шаговых двигателях для медицинских устройств, различных типах конфигураций шаговых двигателей и о том, как правильно управлять шаговыми двигателями.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой бесщеточный электродвигатель постоянного тока, который перемещает определенное число физических градусов за электрический шаг.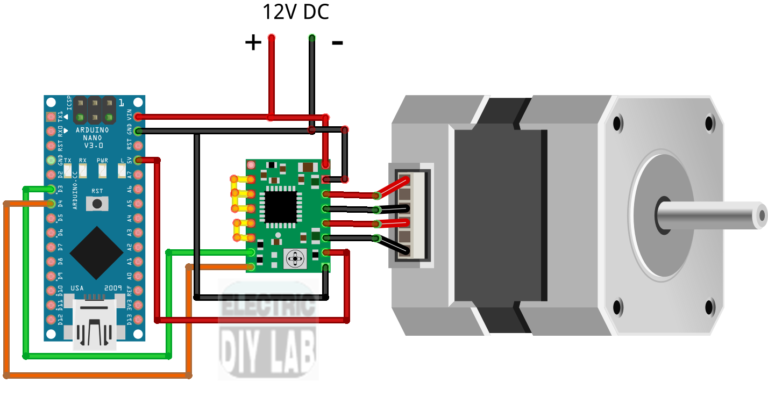 В большинстве спецификаций это определяется как угол шага. Он определяет разрешение вращения для конкретной модели двигателя. Удобным свойством шаговых двигателей по сравнению с традиционными двигателями является их способность двигаться с переменной скоростью в любом направлении, затем полностью останавливаться и удерживать положение с достаточно высоким крутящим моментом в течение неопределенного времени (если позволяет выделение тепла). Это определяется как удерживающий крутящий момент, который является величиной крутящего момента, необходимой для перемещения двигателя на один шаг, когда обмотки находятся под напряжением при номинальном токе, а ротор неподвижен. Шаговый двигатель может использовать управление движением без обратной связи. Это означает, что контроллер отслеживает количество пройденных им шагов и знает положение в градусах, в котором повернулся двигатель. Управление движением с разомкнутым контуром полезно для приложений с линейным движением, которые приводят в движение ходовой винт или ремень, таких как станки с ЧПУ, 3D-принтеры или приводы шприцев.
В большинстве спецификаций это определяется как угол шага. Он определяет разрешение вращения для конкретной модели двигателя. Удобным свойством шаговых двигателей по сравнению с традиционными двигателями является их способность двигаться с переменной скоростью в любом направлении, затем полностью останавливаться и удерживать положение с достаточно высоким крутящим моментом в течение неопределенного времени (если позволяет выделение тепла). Это определяется как удерживающий крутящий момент, который является величиной крутящего момента, необходимой для перемещения двигателя на один шаг, когда обмотки находятся под напряжением при номинальном токе, а ротор неподвижен. Шаговый двигатель может использовать управление движением без обратной связи. Это означает, что контроллер отслеживает количество пройденных им шагов и знает положение в градусах, в котором повернулся двигатель. Управление движением с разомкнутым контуром полезно для приложений с линейным движением, которые приводят в движение ходовой винт или ремень, таких как станки с ЧПУ, 3D-принтеры или приводы шприцев.
Конфигурации привода шагового двигателя
Шаговые двигатели обычно имеют две конфигурации обмоток. Прежде чем выбрать конфигурацию, подходящую для вашего приложения, вы должны понять основную разницу между ними. Этот выбор будет важен при выборе способа привода двигателя.
Первый тип конфигурации — униполярный двигатель. Униполярные шаговые двигатели имеют обмотку с центральным отводом на фазу (см. рис. 1), что делает их особенно простыми в управлении. Центральный отвод каждой обмотки может быть общим для обеих фаз. Два внешних конца для каждой обмотки могут управляться одним транзистором. Для простейшего униполярного драйвера требуется всего четыре транзистора для двунаправленного движения. Самый простой способ идентифицировать униполярный двигатель — это обычно иметь пять или шесть выводов в зависимости от того, был ли внутренний отвод подсоединен внутри или нет. Недостатком является то, что половина каждой фазы обесточивается во время каждого шага.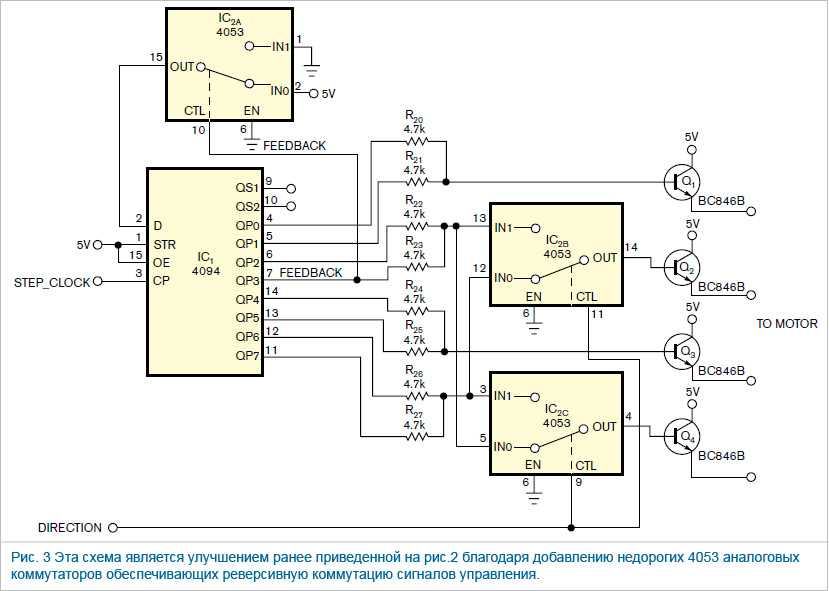 Это означает, что униполярные двигатели обычно крупнее и весят больше по сравнению с биполярными двигателями.
Это означает, что униполярные двигатели обычно крупнее и весят больше по сравнению с биполярными двигателями.
Рис. 1. Конфигурация с униполярным или биполярным двигателем
Наиболее популярной конфигурацией является биполярный двигатель. Биполярные шаговые двигатели имеют по одной обмотке на фазу (см. рис. 1). Чтобы изменить направление движения, необходимо изменить направление тока в обмотке. Для достижения двунаправленного движения требуется полный H-мост на фазу для управления биполярным двигателем. Реальным преимуществом использования биполярных шаговых двигателей является их повышенная эффективность по сравнению с униполярными двигателями. Вся обмотка находится под напряжением во время движения, что приводит к меньшим и более легким двигателям, которые могут создавать удивительно большой крутящий момент. Самый простой способ идентифицировать биполярный шаговый двигатель — это наличие у него четырех выводов, по два на фазу, и ни один из них не является общим.
Совет для профессионалов: вы можете использовать униполярный двигатель как биполярный, если не будете обращать внимание на центральное касание.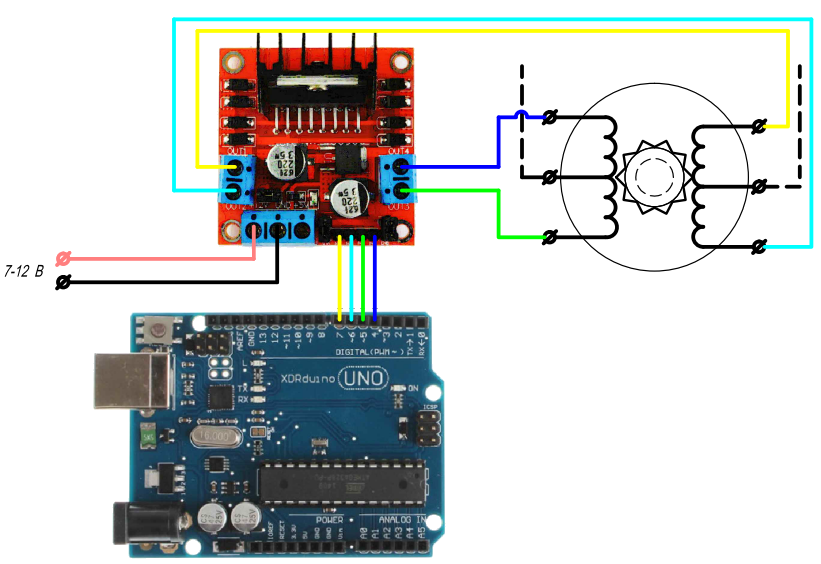 Это может пригодиться, если конкретная конструкция двигателя доступна только в униполярной конфигурации.
Это может пригодиться, если конкретная конструкция двигателя доступна только в униполярной конфигурации.
Сигналы привода шагового двигателя
Обычно для управления движением шагового двигателя используются три типа сигналов привода. Каждый тип привода усложняется, но добавляет дополнительные функции и опции.
Волновой привод активирует только одну фазу за раз. Волновые приводы легко реализовать с помощью базового оборудования, но они используются редко. Поскольку одновременно подается питание только на одну катушку, крутящий момент значительно снижается.
Полношаговый привод аналогичен волновому приводу, но обе фазы всегда включены. Это приводит к максимальному номинальному крутящему моменту, приложенному к двигателю. Временная последовательность в полношаговом приводе также способствует более плавному вращению, поскольку следующая фаза не включается внезапно, а вместо этого плавно вводится во время вращения.
Рис. 2. Волновой привод в сравнении с полношаговым приводом
Микрошаговый/синусоидальный сигнал обычно реализуется встроенными драйверами шагового двигателя для создания тока катушки, который приближается к синусоидальному. Популярная для систем, требующих плавной работы, синусоида снижает шум двигателя (преобразование Фурье). Обычно для этого требуется дополнительная схема, поскольку интегральная схема (ИС) обычно отслеживает и регулирует ток с помощью контура управления с обратной связью.
Популярная для систем, требующих плавной работы, синусоида снижает шум двигателя (преобразование Фурье). Обычно для этого требуется дополнительная схема, поскольку интегральная схема (ИС) обычно отслеживает и регулирует ток с помощью контура управления с обратной связью.
Схемы привода шагового двигателя
Наиболее распространенные методы управления шаговым двигателем включают простое постоянное напряжение или L/R ( L относится к электрический индуктивность и R – электрический драйвер сопротивление) , прерыватель или синусоидальный/микрошаговый драйвер.
Цепь драйвера L/R использует постоянное напряжение для управления каждой катушкой. В цепи L/R постоянная времени катушки ограничивает максимальную величину тока, который может подаваться на катушку, определяемую соотношением между индуктивностью и сопротивлением катушки. Чтобы максимизировать крутящий момент двигателя, ток также должен быть максимизирован. Для достижения этого в цепи L/R обычно используется большое управляющее напряжение для смещения индуктивности. Этот метод привода в настоящее время менее популярен, поскольку мы можем создавать более высокий крутящий момент с меньшим выделением тепла, используя современные методы переключения.
Для достижения этого в цепи L/R обычно используется большое управляющее напряжение для смещения индуктивности. Этот метод привода в настоящее время менее популярен, поскольку мы можем создавать более высокий крутящий момент с меньшим выделением тепла, используя современные методы переключения.
Второй и более распространенный способ привода — встроенный измельчитель. Прерыватель пытается преодолеть индуктивность катушки, подавая высокое напряжение на катушку и отключая ее после того, как ток достигает установленного порога. С помощью чувствительного резистора и контура обратной связи входное напряжение отсекается для достижения желаемого тока в каждой катушке. Основным преимуществом этой конструкции привода является возможность сократить время нарастания тока за счет преодоления индуктивности, но не чрезмерное сжигание энергии после завершения шага. Недостатки использования прерывателя заключаются в том, что он требует дополнительной электроники для измерения тока, требует источника высокого напряжения и требует управления переключением. Однако обо всем этом можно позаботиться, используя интегральную схему привода шагового двигателя.
Однако обо всем этом можно позаботиться, используя интегральную схему привода шагового двигателя.
Встроенные драйверы шагового двигателя
После того, как шаговый двигатель был выбран в соответствии с его механическими требованиями, следующим шагом является запуск этого двигателя. Сейчас проще, чем когда-либо, привести двигатель в рабочее состояние, выбрав готовую микросхему драйвера шагового двигателя или макетную плату. Многие из этих плат предоставляют такие функции, как текущая обратная связь, встроенные профили ускорения и даже встроенное планирование пути для более сложного управления движением.
Некоторые из моих любимых контроллеров, которые можно легко встроить практически в любое устройство, включают контроллер шагового двигателя DRV8825 или DRV8834 от TI, а также любую микросхему драйвера шагового двигателя Trinamic. В частности, микросхемы Trinamic могут управлять всем за вас и обеспечивать хороший бесшумный режим работы, предотвращение остановок и планирование пути.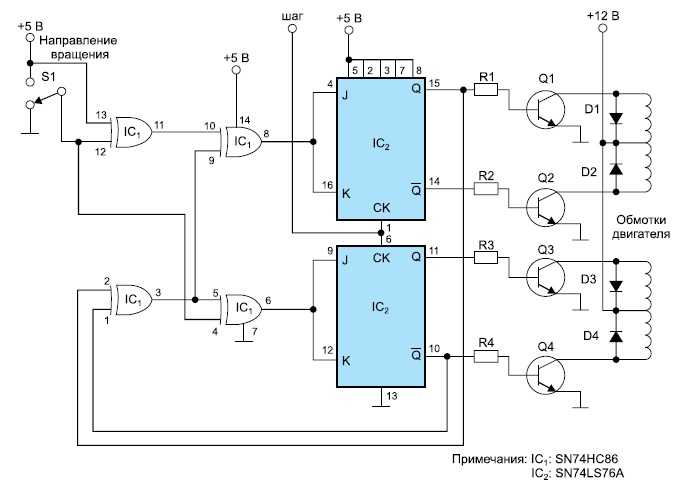
Почти все микросхемы драйверов шаговых двигателей можно заказать в виде макетной платы с простым подключением питания, подключением двигателя и конфигурацией с помощью припаиваемых перемычек, съемных перемычек или соединения UART. Как только будет доказано, что концепция работает должным образом, фактическая ИС драйвера шагового двигателя может быть легко встроена в пользовательскую печатную плату в соответствии с рекомендованной производителем компоновкой и проектными соображениями.
Я надеюсь, что эта информация оказалась для вас полезной и вы лучше понимаете шаговые двигатели для медицинских устройств и способы их управления.
Бесплатное фото 135689614 © Publicdomainphotos – Dreamstime.com
Мартин Келлингхузен, младший инженер-электрик в StarFish Medical. Выпускник Университета Виктории, Мартин работал над различными медицинскими устройствами и увлечен электротехникой — особенно всем, что ездит, летает или движется быстро!
Метки: биполярный двигатель, полный шаговый привод, микрошаговый/синусоидальный, шаговый двигатель, униполярный двигатель, волновой привод
Униполярный и биполярный привод для шаговых двигателей, Часть 3: ИС привода
By Bill Schweber Оставить комментарий
Шаговые двигатели могут быть сконфигурированы для униполярного или биполярного привода; каждый подход имеет различные атрибуты производительности и компромиссы.
Несмотря на полезность и пригодность шаговых двигателей для точного позиционирования, особенно в приложениях с возвратно-поступательным движением, одним из факторов, задержавших их широкое распространение, была проблема обеспечения необходимого управления драйверами. Однако появление встроенных ИС с высоким уровнем функциональности изменило ситуацию. Многие поставщики предлагают микросхемы драйверов шаговых двигателей с различными уровнями функций и возможностей.
Роль драйвера шагового двигателя заключается в том, чтобы выступать в качестве интерфейса между системным микроконтроллером (MCU) или процессором, который выдает директивы, связанные с движением. Затем он реализует их, напрямую управляя током и напряжением двигателя (рис. 1) или управляя внешними МОП-транзисторами.
Рис. 1. Драйвер шагового двигателя является посредником между микроконтроллером и самим двигателем; для более мощных двигателей обычно требуются дискретные внешние полевые МОП-транзисторы, управляемые драйвером для необходимого переключения тока. (Источник изображения: Texas Instruments)
Базовые драйверы поставляются с рядом номинальных комбинаций: обычные драйверы с одной ИС, которые могут подавать до 1 или 2 А на катушки двигателя с помощью встроенных полевых МОП-транзисторов. Для шаговых двигателей, которым требуется больший ток или напряжение, используется другой драйвер шагового двигателя, который работает как драйвер полевого МОП-транзистора и не подключается к двигателю напрямую. Разработчик добавляет подходящие внешние МОП-транзисторы с номиналами, соответствующими требованиям двигателя и проекта. Некоторые поставщики предлагают обширные семейства с различными возможностями управления напряжением и током, а также некоторые контроллеры шаговых двигателей, которые рассчитаны на более широкий диапазон температур или для автомобильных приложений.0009 (Рисунок 2) .
Разработчик добавляет подходящие внешние МОП-транзисторы с номиналами, соответствующими требованиям двигателя и проекта. Некоторые поставщики предлагают обширные семейства с различными возможностями управления напряжением и током, а также некоторые контроллеры шаговых двигателей, которые рассчитаны на более широкий диапазон температур или для автомобильных приложений.0009 (Рисунок 2) .
Рис. 2. Некоторые поставщики предлагают большой выбор контроллеров шаговых двигателей, охватывающих диапазон напряжений, токов и уровней квалификации. (Источник изображения: Texas Instruments)
Различия между этими драйверами заключаются не только в номинальном напряжении и токе или квалификации по надежности. Это также вопрос набора функций и функциональности. Некоторым приложениям требуется базовое управление, в то время как другим требуется дополнительная сложность и возможность использования в составе более сложной замкнутой системы.
Например, Texas Instruments DRV8847 представляет собой базовый драйвер двигателя с двойным H-мостом для таких приложений, как недорогие промышленные двигатели, бытовая техника и принтеры для торговых точек, и который можно использовать с униполярными и биполярными шаговыми двигателями. (Рисунок 3) .
(Рисунок 3) .
Рис. 3: DRV8847 — это компактный драйвер двигателей с двойным H-мостом для униполярных и биполярных шаговых двигателей, требующий управляющего тока до 1 или 2 А. (Изображение: Texas Instruments)
Эта крошечная 16-выводная ИС взаимодействует с микроконтроллером через простой четырехпроводной ШИМ-интерфейс и двухпроводной интерфейс I 9.0267 2 Также доступна версия C. Выходной каскад драйвера имеет N-канальные силовые МОП-транзисторы, сконфигурированные как два полных Н-моста для управления обмотками двигателя или четыре независимых полумоста. (Он также может использоваться для управления двигателями постоянного тока с одним или двумя щетками, а также соленоидами и реле, поскольку все они имеют одинаковую нагрузку.)
до 1 или 2 А (среднеквадратичное значение) на нагрузку в зависимости от того, как она настроена. Встроенные функции защиты включают блокировку при пониженном напряжении, защиту от перегрузки по току на каждом полевом транзисторе, защиту от короткого замыкания, обнаружение разомкнутой нагрузки и перегрева; состояния неисправности обозначаются состоянием выделенного контакта на корпусе.
Более сложный драйвер шагового двигателя — 3,3 В MC54113 от Performance Motion Devices, входящий в семейство Magellan MC58113 (рис. 4) . Это полностью программируемое устройство, размещенное в 100-контактном корпусе TQFP, обеспечивает управление позиционированием, скоростью и крутящим моментом для двухфазных шаговых двигателей (опять же, также для бесщеточных и коллекторных двигателей постоянного тока). Он функционирует как драйвер для указанных пользователем полевых МОП-транзисторов или силовых модулей, поскольку напрямую не управляет двигателем.
Рис. 4. MC54113 от Performance Motion Devices — это усовершенствованный контроллер шагового двигателя, обеспечивающий управление позиционированием, скоростью и крутящим моментом для двухфазных шаговых двигателей, а также драйвер для внешних МОП-транзисторов или силовых модулей. (Изображение: Performance Motion Devices)
MC54113 подключается к хост-процессору через параллельную шину, SPI (последовательный периферийный интерфейс), CANbus 2. 0B или даже классический последовательный интерфейс RS232/485. Он включает в себя различные выбираемые пользователем режимы профилирования управления движением, включая S-образную кривую, трапециевидную форму, контур скорости и электронный редуктор. Он также поддерживает опциональное использование датчика тока или обратной связи энкодера от ротора двигателя. Это позволяет реализовать ПИД-компенсацию сервоконтура и обнаруживать опрокидывание, а также упреждающую компенсацию скорости и ускорения для более четкого управления двигателем (Рисунок 5) . Делая все это, MC54113 освобождает системный процессор от значительной нагрузки по реализации этих функций.
0B или даже классический последовательный интерфейс RS232/485. Он включает в себя различные выбираемые пользователем режимы профилирования управления движением, включая S-образную кривую, трапециевидную форму, контур скорости и электронный редуктор. Он также поддерживает опциональное использование датчика тока или обратной связи энкодера от ротора двигателя. Это позволяет реализовать ПИД-компенсацию сервоконтура и обнаруживать опрокидывание, а также упреждающую компенсацию скорости и ускорения для более четкого управления двигателем (Рисунок 5) . Делая все это, MC54113 освобождает системный процессор от значительной нагрузки по реализации этих функций.
Рис. 5: MC54113 поддерживает обратную связь от датчиков тока или энкодеров для улучшенного управления с обратной связью и обнаружения неисправностей. (Изображение: Performance Motion Devices)
Шаговые двигатели широко используются в приложениях, начиная от небольших и недорогих принтеров и заканчивая более важными, такими как управление позиционированием функций трансмиссии в автомобилях.