Содержание
Как узнать мощность электродвигателя если нет таблички
На этапе подбора Вы можете столкнуться с тем, что у электромотора нет паспорта, а информацию с шильдика невозможно идентифицировать. У наших покупателей возникает вопрос: как узнать мощность электродвигателя, если нет таблички? В данной статье постараемся определить мощность двигателя и его обороты по известным параметрам.
Существует несколько способов, как определить мощность асинхронного электродвигателя 380В/220 Вольт:
- По диаметру вала
- По габаритам и крепежным размерам
- По току и напряжению
- По сопротивлению обмоток
Как узнать мощность электродвигателя по диаметру вала
Самый простой способ определить мощность трехфазного электродвигателя без бирки — это измерить диаметр и длину вала. Ниже в таблицах Вы найдете необходимые размеры, которые помогут самостоятельно узнать мощность асинхронного двигателя.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Перейти к выбранной модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 | |||
Как определить обороты вала электродвигателя
Асинхронные трехфазные двигатели серии АИР имеют 4 диапазона вращения ротора: 3000, 1500, 1000 и 750 об/мин. В зависимости от этого будет меняться количество полюсов. Для наглядности, рассмотрим на примере электродвигателя с маркировкой АИР 160:
В зависимости от этого будет меняться количество полюсов. Для наглядности, рассмотрим на примере электродвигателя с маркировкой АИР 160:
- АИР 160 М2 – число 2 обозначает 3000 оборотов
- АИР 160 М4 – 4 означает, что вал вращается со скоростью 1500 об/мин
- АИР 160 М6 – 6 обозначает частоту вращения в 1000 об. мин
- АИР 160 М8 – где 8 это скорость вращения вала составляет 750 оборотов
В случае невозможности узнать маркировку мотора, Вы сможете определить количество полюсов при помощи амперметра. Подключите измерительный прибор к обмотке статора. При вращения вала, стрелка на циферблате устройства будет колебаться. Число отклонений равно количеству полюсов двигателя.
Также можно определить обороты асинхронного электродвигателя по обмотке. Катушка обмотки статора у электрического двигателя на 3000 об/мин занимает половину окружности (начало и конец обмотки параллельны друг другу). У мотора с оборотами 1500 в минуту угол расположения обмотки составляет 120°, а на 1000 об — 90°.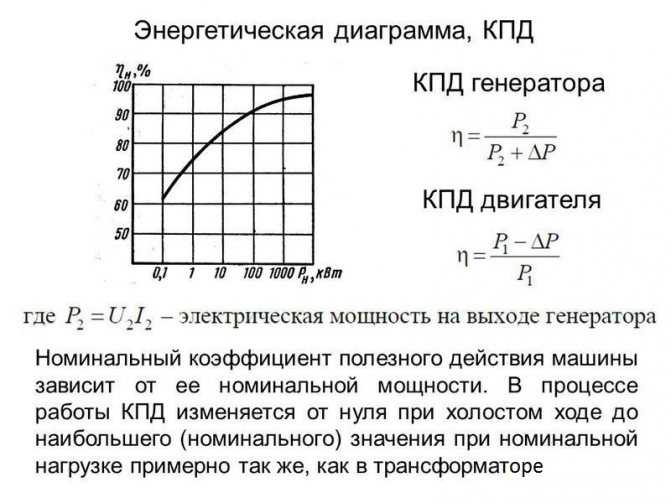 Перейти к таблицам с обмоточными данными на все электродвигатели типа АИР.
Перейти к таблицам с обмоточными данными на все электродвигатели типа АИР.
- 2 полюса — 3000 об/мин
- 4 полюса — 1500 об/мин
- 6 полюсов — 1000 об/мин
- 8 полюсов — 750 об/мин
Как определить мощность электродвигателя по габаритам
Достаточно легкий метод узнать мощность двигателя в квт – это измерить размеры корпуса. Чтобы определить мощность электромотора по габаритным размерам, воспользуйтесь таблицами:
Определить мощность электродвигателя на лапах по габаритам
|
P, кВт
|
3000 об/мин
|
1500 об/мин
|
1000 об/мин
|
750 об/мин
| ||||
|
L10, мм
|
B10, мм
|
L10, мм
|
B10, мм
|
L10, мм
|
B10, мм
|
L10, мм
|
B10, мм
| |
|
1,5
|
100
|
125
|
100
|
125
|
125
|
140
|
140
|
160
|
|
2,2
|
125
|
140
|
140
|
160
|
190
| |||
|
3
|
125
|
140
|
112
|
160
|
190
| |||
|
4
|
112
|
160
|
140
|
216
| ||||
|
5,5
|
140
|
190
|
216
|
178
| ||||
|
7,5
|
190
|
216
|
178
|
254
| ||||
|
11
|
178
|
216
|
178
|
254
|
210
| |||
|
15
|
254
|
254
|
210
|
241
|
279
| |||
|
18,5
|
210
|
210
|
241
|
279
|
267
|
318
| ||
|
22
|
203
|
279
|
203
|
279
|
267
|
318
|
310
| |
|
30
|
241
|
241
|
310
|
311
|
356
| |||
|
37
|
267
|
318
|
267
|
318
|
311
|
356
|
406
| |
|
45
|
310
|
310
|
406
|
349
| ||||
|
55
|
311
|
356
|
311
|
356
|
349
|
368
| 457
| |
|
75
|
406
|
406
|
368
|
457
|
419
| |||
|
90
|
349
|
349
|
419
|
406
|
508
| |||
|
110
|
368
|
457
|
368
|
457
|
406
|
508
|
547
| |
|
132
|
419
|
419
|
457
|
610
|
355
| |||
|
160
|
406
|
508
|
406
|
508
|
610
|
355
| ||
|
200
|
457
|
457
|
560
|
610
| ||||
|
250
|
610
|
355
|
610
|
355
|
560
|
610
| ||
|
315
|
630/800
|
686/630
|
—
|
—
| ||||
L10 — расстояние между отверстиями по длине на лапах
B10 — расстояние между отверстиями по ширине лап
Определить мощность электродвигателя по размерам фланца
|
P, кВт
|
3000 об/мин
|
1500 об/мин
|
1000 об/мин
|
750 об/мин
| ||||
|
D20, мм
|
D22, мм
|
D20, мм
|
D22, мм
|
D20, мм
|
D22, мм
|
D20, мм
|
D22, мм
| |
|
1,5
|
165
|
11
|
165
|
11
|
215
|
14
|
215
|
14
|
|
2,2
|
215
|
14
|
265
| |||||
|
3
|
215
|
14
|
365
| |||||
|
4
|
265
|
300
|
19
| |||||
|
5,5
|
265
|
300
|
19
| |||||
|
7,5
|
265
|
300
|
19
| |||||
|
11
|
300
|
19
| ||||||
|
15
|
350
| |||||||
|
18,5
|
350
|
400
| ||||||
|
22
|
350
|
350
|
400
| |||||
|
30
|
500
| |||||||
|
37
|
400
|
400
|
500
| |||||
|
45
|
400
| |||||||
|
55
|
500
|
500
|
550
|
24
| ||||
|
75
|
500
|
550
|
24
| |||||
|
90
|
500
|
28
| ||||||
|
110
|
550
|
24
|
550
|
24
|
28
| |||
|
132
|
550
|
680
| ||||||
|
160
|
550
|
28
|
28
|
680
| ||||
|
200
|
550
|
740
|
24
| |||||
|
250
|
680
|
680
|
740
|
24
|
—
| |||
|
315
|
680
|
—
| ||||||
D20 — по диаметру большого фланца
D22 — диаметр отверстий фланца
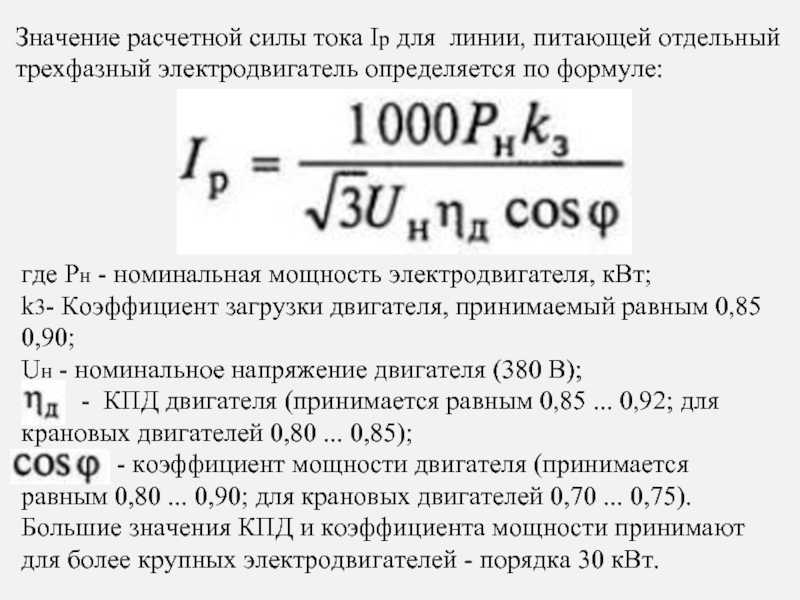
Расчет мощности электродвигателя по току и напряжению
Перед тем как определить мощность трехфазного двигателя по току, — его подключают к электрической сети, поочередно замеряя напряжение и токи в цепях обмотки статора.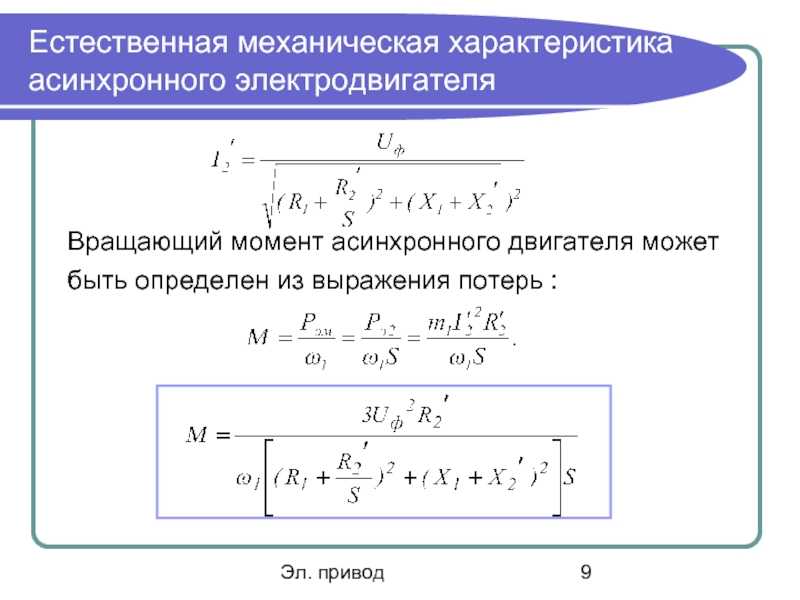 Узнать мощность электродвигателя по току можно тестером (мультиметром). С его помощью можно не только проверить, на сколько киловатт электродвигатель рассчитан, но и узнать напряжение, сопротивление, проверить цепи питания на обрыв. Для расчета мощности электродвигателя по току, используйте формулу:
Узнать мощность электродвигателя по току можно тестером (мультиметром). С его помощью можно не только проверить, на сколько киловатт электродвигатель рассчитан, но и узнать напряжение, сопротивление, проверить цепи питания на обрыв. Для расчета мощности электродвигателя по току, используйте формулу:
- Р — мощность электродвигателя
- U — напряжение
- Iа — токи 1 фазы
- Iв — ток 2 фазы
- Iс — токи 3 фазы
Перейти по ссылке, чтобы узнать как определить ток электродвигателя по мощности.
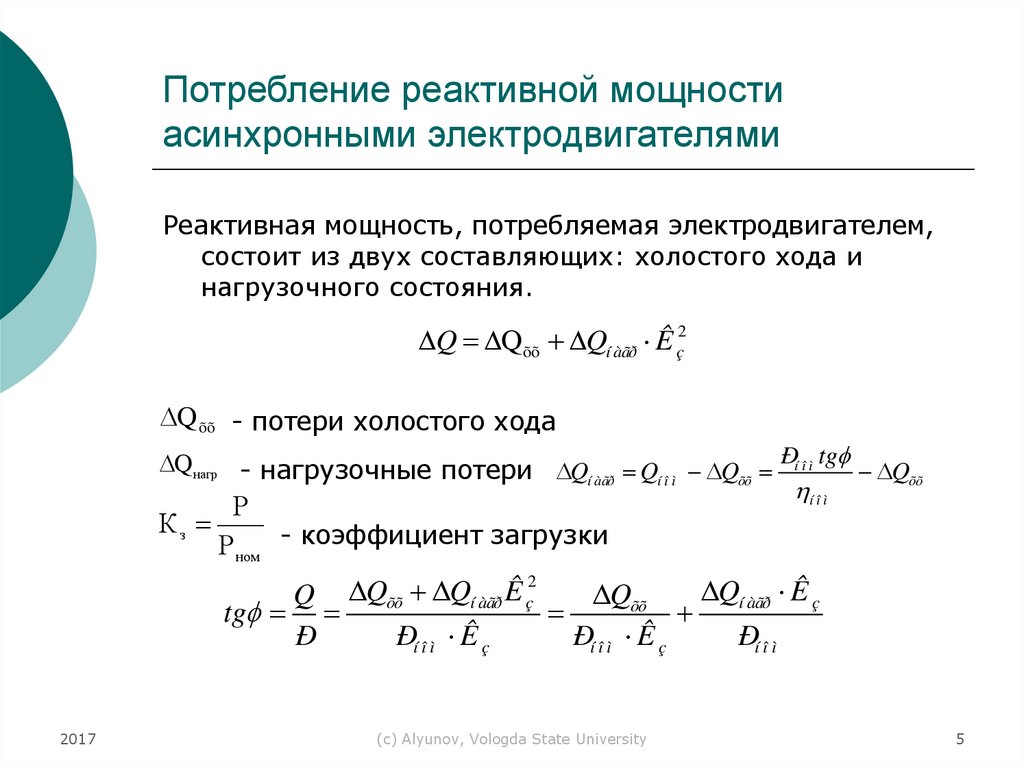
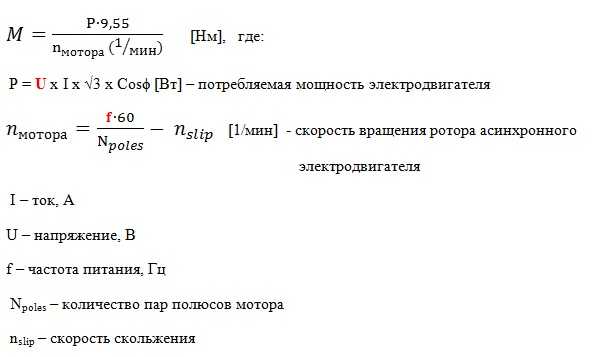
Как определить коэффициент мощности асинхронного двигателя
Коэффициентом мощности электродвигателя (соs φ) называется отношения активной потребляемой мощности (P) и полной потребляемой электрической мощности (S) при работе электродвигателя с номинальной мощностью, напряжением, частотой тока и скоростью вращения вала двигателя.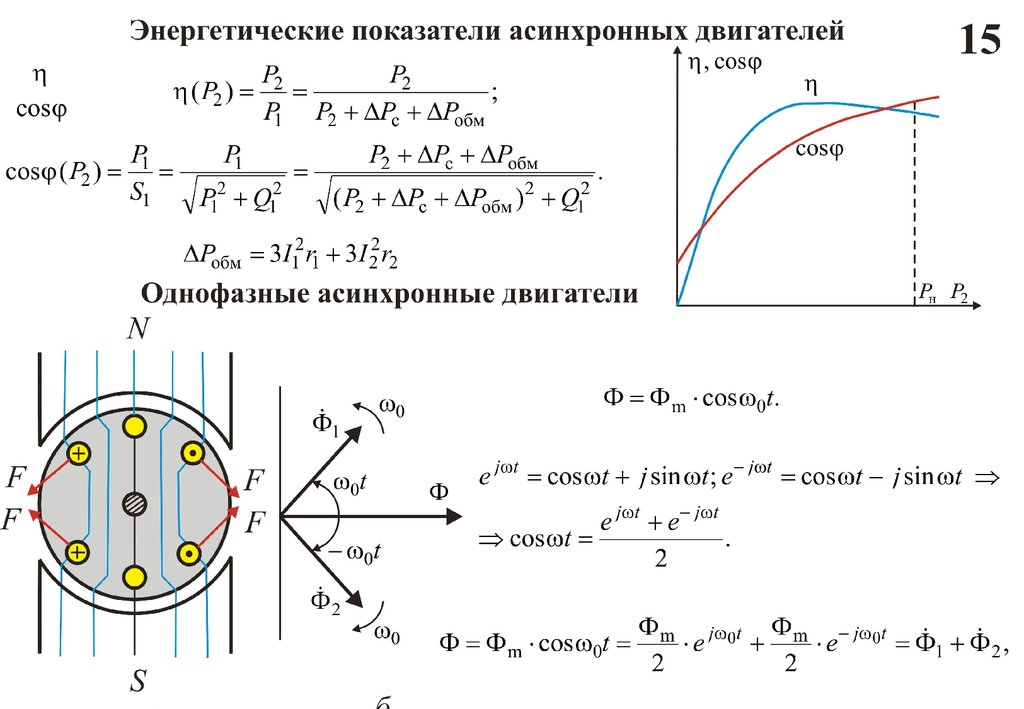
Числовой коэффициент мощности всегда меньше единицы и будет соответствовать расчету по формуле соs φ = P(Вт)/S(ВА).
Узнать коэффициент мощности асинхронного трехфазного электродвигателя с использованием формулы:
- cosφ — косинус фи
- P — активная мощность (Вт)
- √3 — квадратный корень из трех
- U — напряжение (В)
- I — Ток (А)
Узнать мощность электродвигателя по сопротивлению обмоток
Рассчитать мощность двигателя в кВт можно по формуле. Для этого подключаем электродвигатель по схеме треугольник к сети и замеряем сопротивление. Полученные значения делим на два. Результат заносим в формулу: P=(220v*220v)/R после умножаем на три. При соединении звездой, результат умножается на шесть.
Если не получилось узнать мощность и обороты
Если не получилось определить мощность электродвигателя и обороты самостоятельно или Вы сомневаетесь в достоверности полученных измерений – обратись к специалистам Завода Электромеханического Оборудования. Квалифицированные сотрудники нашего предприятия помогут подобрать электромотор или произвести ремонт нерабочего электродвигателя.
Квалифицированные сотрудники нашего предприятия помогут подобрать электромотор или произвести ремонт нерабочего электродвигателя.
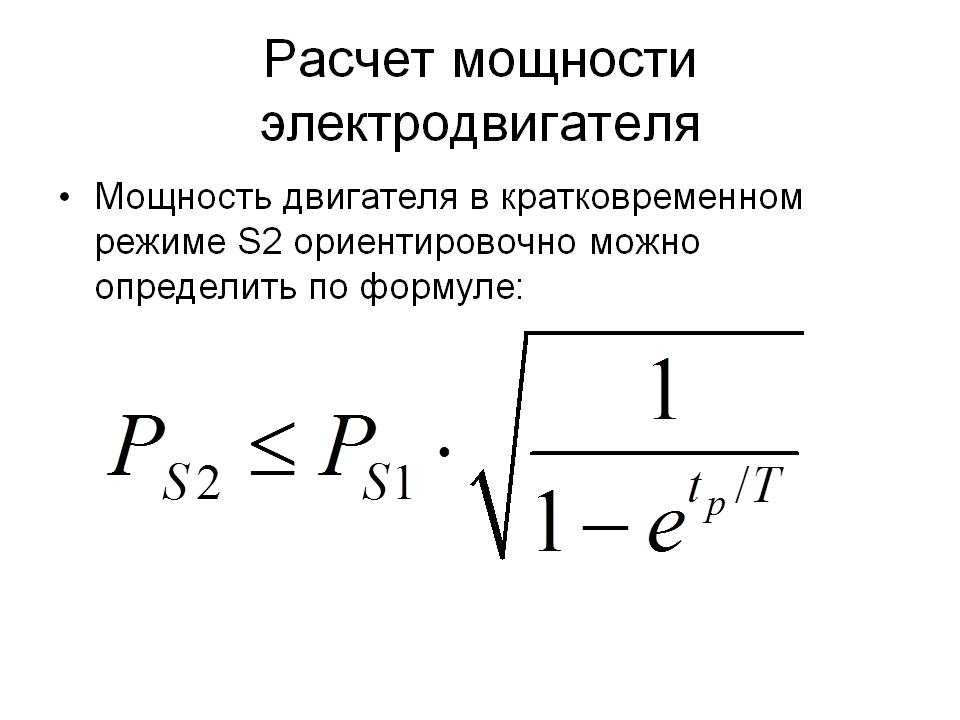
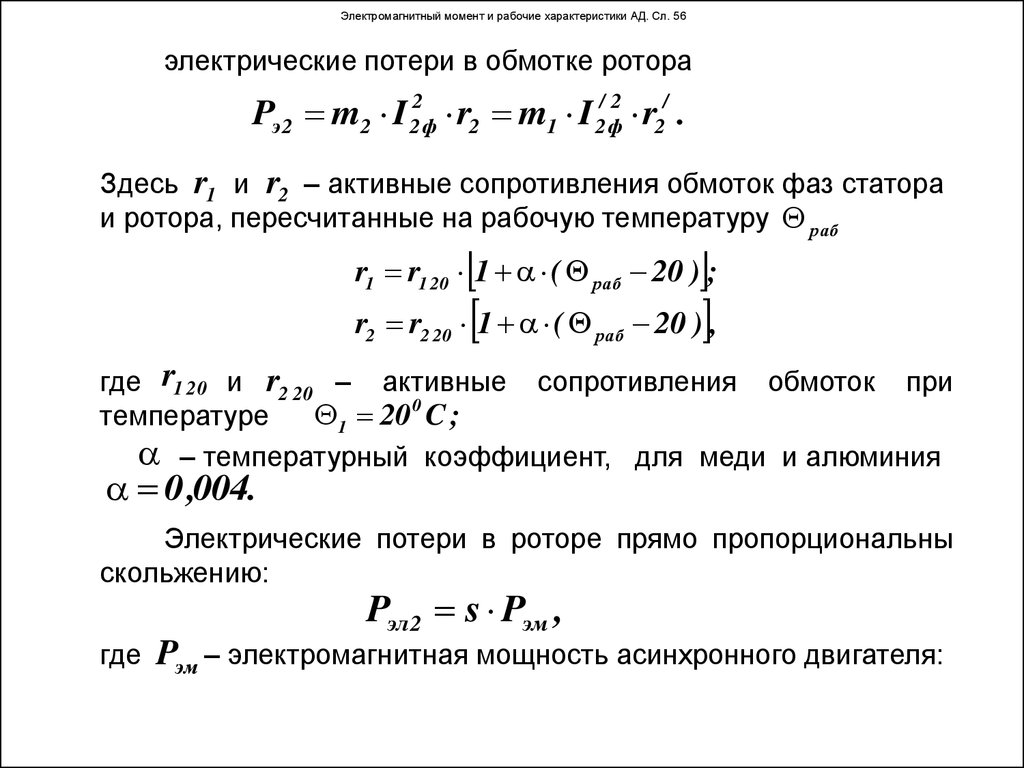
Электромагнитная мощность и потери в асинхронном двигателе
Мощность, потребляемая
двигателем из сети, определяется по
формуле
Р1 =
√3 U1I1cos
φ1.
Часть этой
мощности (рис. 10.16)
теряется в обмотке статора:
ΔРобм1 =
3 I12r1,
Рис. 10.16. Потери
мощности в асинхронном двигателе
а
часть, ΔРст1,
составляет потери в сердечнике статора
от перемагничивания и вихревых токов.
Мощность, передаваемая
вращающимся магнитным полем ротору,
называется электромагнитной мощностью
и составляет
Рэм = P1 —
ΔРобм1 —
ΔРст1 =
3Е2кI2 cos
ψ2.
(10,34)
Часть электромагнитной
мощности теряется в обмотке ротора:
ΔРобм2 =
3 I22r2,
(10,35)
а
часть, ΔРст2,
составляет потери в сердечнике ротора
от гистерезиса и перемагничивания.
Мощность,
преобразуемая в механическую, равна
Рмех = Рэм —
ΔРобм2 —
ΔРст2.
(10,36)
Небольшая часть
механической мощности теряется на
тре-ние в подшипниках ротора о воздух
и вентиляцию.
Мощность, развиваемая
двигателем на валу,
Рв = Рмех —
ΔРмех .
(10,37)
Все потери мощности,
кроме вентиляционных, которые представляют
собой затраты мощности на продувание
воздуха внутри двигателя с целью лучшего
охлаждения, превращаются в теплоту и
нагревают двигатель.
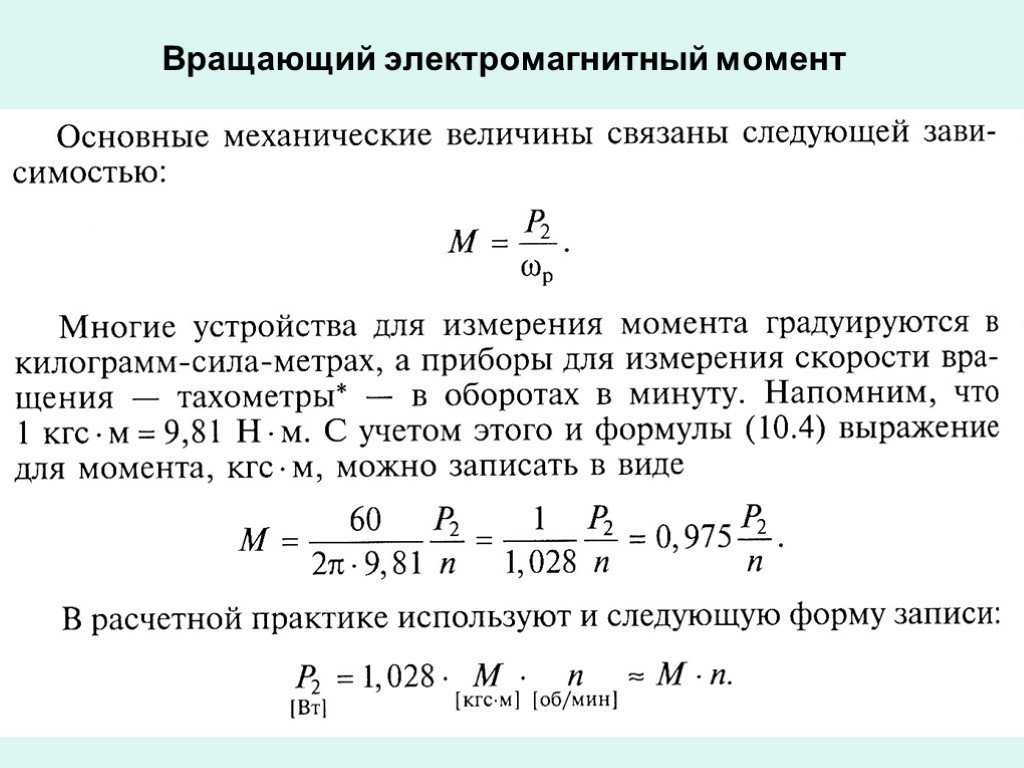
Известно, что
мощность равна произведению момента
на частоту вращения:
Р =
Мω.
В асинхронном
двигателе произведение электромагнитного
момента, возникающего в результате
взаимодействия тока ротора с магнитным
полем, на частоту вращения поля
представляет собой электромагнитную
мощность:
Мэмω0 = Рэм.
(10,38)
Механическая
мощность, развиваемая двигателем, равна
произведению электромагнитного момента
на частоту вращения ротора.
Мэмω
= Рмех.
(10,39)
Если
пренебречь потерями мощности в сердечнике
ротора вследствие их малости относительно
потерь в обмотке ротора, то разность
электромагнитной и механической
мощностей, как следует из (10.36), будет
равна потерям мощности в обмотке ротора1:
Рэм — Рмех =
ΔРобм2 =
3 I22r2.
(10,40)
Подставив в (10.40)
вместо мощности их значения из (10. 38) и
38) и
(10.39), получим
Мэмω0 — Мэмω
= 3 I22r2,
откуда
Мэм = | 3 I22r2 | . |
ω0 — |
Заменив
ω0 —
ω через ω0s,
что вытекает из (10.23), получим выражения
электромагнитного момента
Мэм = | 3 I22r2 | . |
ω0s |
(10. 41)
41)
1 Короткозамкнутая
обмотка ротора имеет не три, а m фаз. Для
общности выводов обмотка ротора приведена
к трем фазам, которые имеют обмотки
статора и ротора двигателя с фазным
ротором.
и электромагнитной
мощности
Pэм = | 3 I22r2 | . |
s |
(10.42)
Момент,
развиваемый двигателем на валу, будет
меньше электромагнитного момента на
величину ΔМмех,
обусловленную силами трения в подшипниках,
ротора о воздух и вентиляционными
потерями:
М = Мэм —
ΔМмех .
Потери
момента ΔМмех для
асинхронных двигателей средней и большой
мощности относительно малы, и ими обычно
пренебрегают.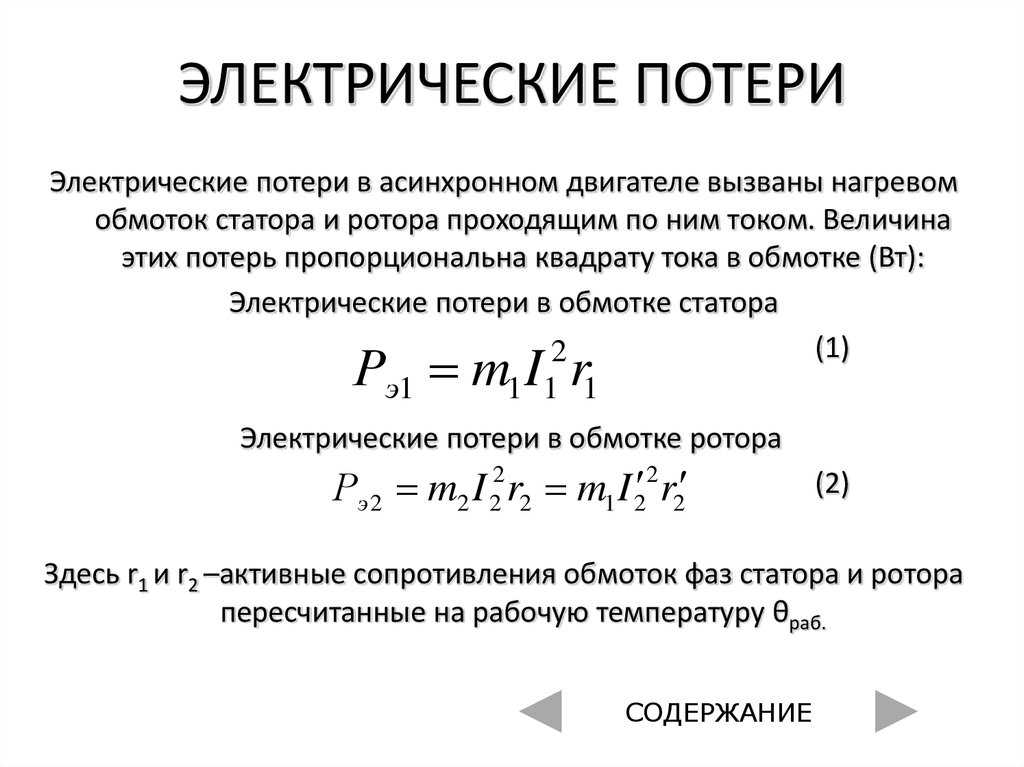 В практических расчетах
В практических расчетах
часто принимают, что
М = Мэм.
(10,43)
В выражении (10.41)
отсутствует магнитный поток, что на
первый взгляд противоречит принципу
действия двигателя. Однако легко
показать, что это не так: магнитный поток
вошел в уравнение в неявном виде.
Выразив
в (10.41) потери мощности в обмотке I22r2 через
ЭДС, ток и cos ψ2 ротора
| /\ |
|
3I22r2 = | E2, I2 | ) |
Получим
Mэм = | 3E2I2 cos | . |
ω0s |

(10.44)
Подставляя
в (10.44) вместо ЭДС Е2 ее
значение из (10.27) и учитывая (10.42), получаем
Mэм = | 3E2кsI2 cos | = | 3•4,44f1w2Фk02I2 cos | = |
ω0s | ω0 |
(10.45)
где С =
3 • 4,44f1w2k02/ω0 —
конструктивный коэффициент, обусловливающий
момент двигателя.
Используя выражения
(10.40), (10.42), можно получить два соотношения:
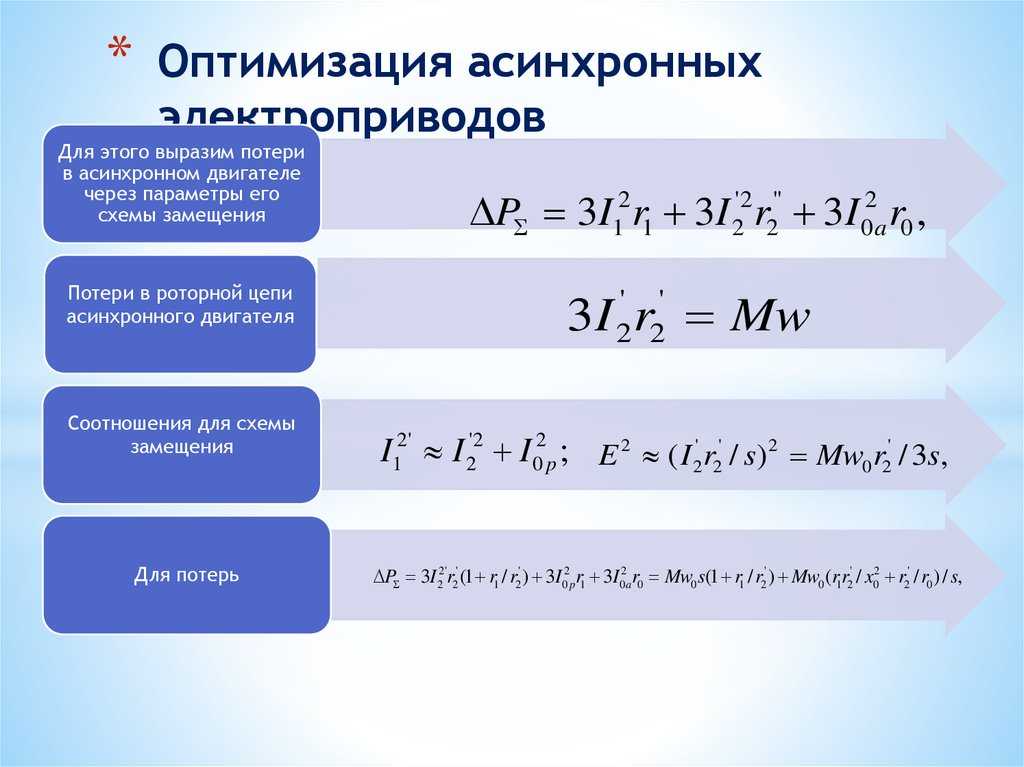
потери в обмотке
ротора
ΔPобм2 = Pэмs;
механическая
мощность, развиваемая двигателем,
Pмех = Pэм(1
— s)
Из
этих выражений вытекает, что при
неподвижном роторе, когда s =
l, вся электромагнитная мощность
преобразуется в теплоту в обмотке
ротора, а механическая мощность равна
нулю. При номинальном режиме работы,
когда s ≈ 0,02
— 0,08, почти вся электромагнитная мощность
(0,92 — 0,98) преобразуется в механическую
и только небольшая ее часть (0,02 — 0,08)
преобразуется в теплоту в обмотке
ротора.
СХЕМА
ЗАМЕЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Для анализа работы
асинхронного двигателя пользуются
схемой замещения. Схема замещения
асинхронного двигателя аналогична
схеме замещения трансформатора и
представляет собой электрическую схему,
в которой вторичная цепь (обмотка ротора)
соединена с первичной цепью (обмоткой
статора) гальванически вместо магнитной
связи, существующей в двигателе.
Рис. 10.17. Схема
замещения асинхронного двигателя
Основное отличие
асинхронного двигателя от трансформатора
в энергетическом отношении состоит в
следующем. Если в трансформаторе энергия,
переданная переменным магнитным полем
во вторичную цепь, поступает к потребителю
в виде электрической энергии, то в
асинхронном двигателе энергия, переданная
вращающимся магнитным полем ротору,
преобразуется в механическую и отдается
валом двигателя потребителю в виде
механической энергии.
Электромагнитные
мощности, передаваемые магнитным полем
во вторичную цепь трансформатора и
ротору двигателя, имеют одинаковые
выражения:
Рэм = Р1 —
ΔР1.
В трансформаторе
электромагнитная мощность за вычетом
потерь во вторичной обмотке поступает
к потребителю:
Р2 = Рэм —
3I22r2 =
3U2I2 cos
φ2 =
3I22rп =
3I’22r’п,
(10. 46)
46)
где rп —
сопротивление потребителя. В асинхронном
двигателе электромагнитная мощность
за вычетом потерь в обмотке ротора
превращается в механическую мощность:
Р2 = Рмех = Рэм —
3I22r2 = Рэм —
3I’22r’2.
(10.47)
Подставив
в (10.47) вместо Р ее
значение из (10.42), получим
Pмех=3I22 | r2(1 | =3I’22 | r’2(1 | = | |||
s | s | ||||||
где r’э = r’2 | 1 | . | |||||
s | |||||||
(10,48)
Сравнивая выражения
(10.46) и (10.48), можно заключить, что
r’п = r’э.
Таким
образом, потери мощности в
сопротивлении r’э численно
равны механической мощности, развиваемой
двигателем.
Заменив
в схеме замещения трансформатора
сопротивление нагрузки r’п на r’э = r’2 (1
— s)/s,получим
схему замещения асинхронного двигателя
(рис. 10.17). Все остальные элементы схемы
замещения аналогичны соответствующим
элементам схемы замещения
трансформатора: r1, х1 —
активное сопротивление и индуктивное
сопротивление рассеяния фазы обмотки
статора; r’2, х’2—
приведенные к обмотке статора активное
сопротивление и индуктивное сопротивление
рассеяния фазы обмотки ротора.
Приведенные
значения определяются так же, как и для
трансформатора:
r’2 =
r2k2, х’2 = х2k2,
где k
= E1/E2к = U1ф/E2к —
коэффициент трансформации двигателя.
Может возникнуть
сомнение в возможности использования
гальванической связи цепей статора и
ротора в схеме замещения, поскольку
частоты в этих цепях на первый взгляд
не одинаковы. Первая часть схемы замещения
представляет собой эквивалентную схему
фазы обмотки ротора, которая, как было
показано в § 10.7, приведена к частоте
тока статора. В реальном же двигателе
в отличие от схемы замещения частоты
тока ротора и статора не одинаковы.
Формулы и уравнения линейных и асинхронных двигателей
Следующие уравнения и формулы, относящиеся к линейным и асинхронным двигателям, можно использовать для расчета основных параметров при анализе и проектировании однофазного и трехфазного асинхронного двигателя.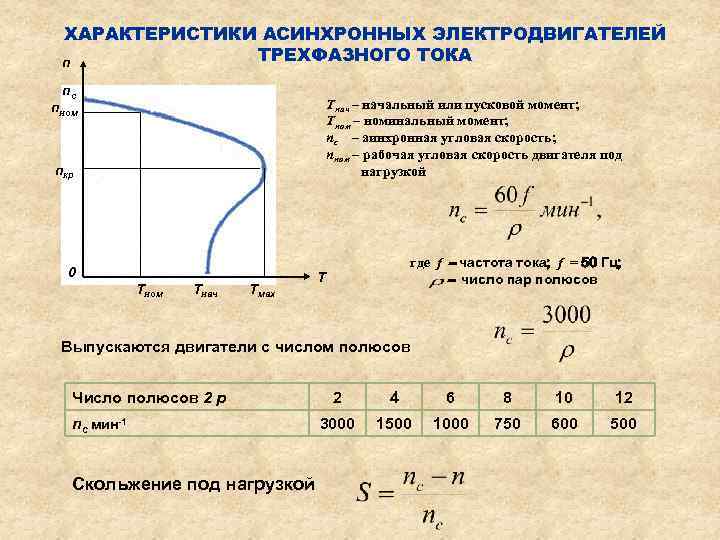
Содержание
Формула и уравнения для асинхронного двигателя:
ЭДС индукции:
e инд = vB л
12
, где
- e ind = ЭДС индукции
- v = скорость ротора
- B = плотность магнитного потока
- l = длина проводников внутри магнитного поля
Ток ротора:
Ток ротора определяется по формуле:
Создаваемый крутящий момент:
Термины, используемые в уравнениях и формулах крутящего момента двигателя.
- N с = Синхронная скорость
- s = скольжение двигателя
- s b = пробойная или выдвижная накладка
- E 1 = напряжение статора или входное напряжение
- E 2 = ЭДС ротора на фазу в состоянии покоя
- R 2 = сопротивление ротора на фазу
- X 2 = реактивное сопротивление ротора на фазу
- В = напряжение питания
- К = соотношение оборотов ротора/статора на фазу
Пусковой момент
- Максимальный пусковой момент Условие
R 2 = X 2
- Отношение пускового момента к напряжению питания
- Крутящий момент в рабочем состоянии
- Полный крутящий момент
- Условия максимального рабочего крутящего момента
- Максимальный рабочий крутящий момент
- Накладка аварийная
- Отношение крутящего момента к максимальному крутящему моменту
- ω скольжение = ω с – ω (Угловая скорость в Рад/с)
T ст α V 2
R 2 = sX 2
Скорость скольжения и скольжение асинхронного двигателя:
Скорость скольжения представляет собой разницу между синхронной скоростью и скоростью вращения ротора; 9 = N с
Где
- N скольжение = скорость скольжения
- N с = Синхронная скорость = 120f/P
- N = скорость вращения двигателя
Скольжение асинхронного двигателя является относительным показателем, выраженным в процентах. Это дано:
Это дано:
Где
- S — скольжение асинхронного двигателя
Скорость ротора :
Скорость ротора асинхронного двигателя определяется как
- N = (1-с)N
- ω = (1-с) ω с (угловая скорость в рад/с)
Электрическая частота ротора:
Где
- f r = частота ротора
- f = Частота линии
- P = Количество полюсов
Мощность асинхронного двигателя:
Связанные термины, используемые в формулах и уравнениях мощности двигателя.
- P 1 = входная мощность статора
- P 2 = Входная мощность ротора
- P м = Полная выходная мощность ротора
- P вых = выходная мощность
- Т г = полный крутящий момент
- T ш = крутящий момент на валу
Входная мощность ротора:
P 2 = T г ω с
- Полная выходная мощность ротора:
2
P м = T г ω
- Выходная мощность:
P вых = T ш ω
P1 = P2 + потери в статоре = P м + потери в меди ротора = P OUT + Потери намонтаж и трения
Вход ротор Вход: Выходная механическая мощность: ротор CU Catio:
, где
- P CR = I 9000 29
- P CR = I 9000 2
- P CR = I 9000 2
- P CR = I 9000 2
- P CR = I 9000 2
- .
 потеря
потеря
Синхронный Ватт:
Крутящий момент, при котором машина на синхронной скорости будет генерировать один ватт;
КПД асинхронного двигателя:
- Эффективность ротора:
- Общая эффективность
Формула и уравнения для линейного асинхронного двигателя:
Синхронная скорость:
Где
- В с 9 0 = линейная 8 синхронная скорость 8
- w = ширина одного шага полюсов
- f = частота сети
Слип:
Где
- v с = линейная синхронная скорость
- v = Фактическая скорость
тяга или сила :
, где
P 2 = Входная мощность ротора
Ротор CU Потеря:
Gross Mechanical Power:
Gross Mechanical Power:
Gross Mechanical Power:
.
:- Преобразование формул и уравнений
- Основные формулы и уравнения электротехники
- Формулы основных электрических величин
- Формулы мощности в однофазных и трехфазных цепях постоянного и переменного тока
- Формулы и уравнения в области электротехники и электроники
- Символы электродвигателей
URL скопирован
Показать полную статью
Связанные статьи
Кнопка «Вернуться к началу»
Мощность и крутящий момент в асинхронных двигателях
Здравствуйте, ребята, я надеюсь, что вы все хорошо проводите время в своей жизни. В сегодняшнем уроке мы обсудим Мощность и крутящий момент в асинхронных двигателях. Поскольку асинхронные двигатели являются двигателями с самозапуском, их отношения мощности (P) и крутящего момента (t) значительно отличаются от соотношений в синхронном двигателе. Как мы уже говорили, асинхронный двигатель также известен как вращающийся трансформатор.
Его входное питание представляет собой 3-х кратную схему тока (I) и напряжения (V).В случае обычного трансформатора выходом является электрическая мощность, получаемая от вторичной части трансформатора. Но в случае, когда вторичная часть двигателя (обмотки) или (ротор) имеет короткое замыкание в его конечной точке, поэтому невозможно получить выход в виде электрической мощности, а его выход представляет собой механическую мощность. В сегодняшнем посте мы рассмотрим, как крутящий момент возникает в асинхронном двигателе, и как он связан с мощностью двигателя. Итак, начнем с Мощность и крутящий момент в асинхронных двигателях.
Мощность и крутящий момент в асинхронных двигателях
- Входное питание (P в ), подаваемое на асинхронный двигатель, представляет собой 3-ø токи (I) и напряжения (V).
- После подачи питания на статор двигателя мы должны столкнуться с некоторыми потерями мощности в статоре, известными как потери в меди или потери I 2 R.
- Некоторые части потребляемой мощности также теряются из-за гистерезисных потерь и вихревых токов в стабилизирующей части двигателя.
- Остаточная мощность передается на ротор двигателя, пересекая воздушный зазор между неподвижной частью (статор) и вращающейся частью (ротор).
- Эта мощность называется мощностью воздушного зазора (P AG ) двигателя.
- Оставшаяся мощность, переданная на ротор после устранения потерь в меди I 2 R, преобразуется в механическую мощность на роторе.
- После этой потери мощности из-за трения, потери сопротивления воздуха (P F&W ) и из-за паразитных потерь (P misc ) оставшаяся мощность, которую мы получаем на выходе, называется выходной мощностью двигателя (P out ).
- В диаграмме потока мощности в этой точке упоминаются потери в сердечнике, обычно они в этой точке не упоминаются.
- Особенности потерь в сердечнике, где они отмечены в двигателе, несколько случайны.
- Эти потери (потери в сердечнике) двигателя существуют наполовину со стороны статора и наполовину со стороны ротора.
- Между тем, асинхронный двигатель обычно работает на скорости, близкой к синхронной скорости (n sync ), относительное вращение полей над корпусом ротора довольно вялое, а потери в сердечнике ротора малы, связанные с потерями в сердечнике на задающей части ротора.
- Так как основная часть потерь в сердечнике (I 2 R) приходится на конформирующую часть двигателя, по этой причине потери в сердечнике указаны в этом месте на силовой диаграмме.
- Этот тип потерь был обозначен R c в соответствующей (эквивалентной) схеме двигателя, эту схему мы уже изучали в прошлом уроке по эквивалентной схеме асинхронного двигателя .
- Если потери в сердечнике (I 2 R) предполагаются только нулевым (X ватт) вместо этого компонента схемы, они часто берутся вместе с механическими потерями и вычитаются в том месте на рисунке, где расположены механические потери. .
- Другие потери, а именно паразитные, парусные и дробные, зависят от скорости двигателя, чем больше скорость, тем больше эти потери.
- Но если скорость двигателя почти равна или приближается к синхронной скорости, то потери в сердечнике будут иметь меньшее значение.
- Итак, эти 3 класса потерь иногда объединяют и называют вращательными потерями.
- Полные потери вращения двигателя часто измеряются как непрерывные (постоянные) при изменении скорости, в то время как составные потери изменяются в противоположных направлениях при изменении скорости.
Уравнения мощности и крутящего момента асинхронного двигателя
- Сначала мы обсудим уравнения мощности ротора.
Уравнение мощности асинхронного двигателя
- Если мы изучим пофазную эквивалентную схему асинхронного двигателя, то мы можем использовать ее для расчета крутящего момента и мощности, чтобы понять работу двигателя.
- Значение входного тока (I) для фазы (ø) двигателя может быть получено путем деления входного напряжения (V) на полное равное полное сопротивление (Z).
I1 = V ø /Z eq
Z eq = R1+Jx1 + 1/ (Gc -JB M + (1/(V2/s + Jx2))
- Итак, статор (I 2 9 R) можно рассчитать потери в меди (P SCL ), потери в сердечнике и роторе (I 2 R).
- Потери в статоре (I 2 R) в 3-ø указаны ниже.
(P SCL )= 3I 1 R 1
- Потери в сердечнике определяются как.
P сердечник = 3E 2 G c
- Воздушный зазор обозначен как.
P AG = P в – (P SCL )- P сердечник
- Если мы наблюдаем на соответствующей (эквивалентной) схеме ротора. Компонент схемы, на который может расходоваться мощность воздушного зазора (P AG ), находится в сопротивлении R 2 /S.
- Таким образом, мощность воздушного зазора (P AG ) также может быть представлена как.
(P AG ) = 3I 2 2 (R 2 /с) ——(A)
- Реальные резистивные потери мощности в цепи ротора принимаются уравнением.
P RCL = 3I 2 R x R R
- Так как мощность не изменяется при обозначении (отнесении) к идеальному (идеальному) трансформатору, потери в меди ротора 7 RCL (P ) также может быть указано как
P РКЛ = 3I 2 2 x R 2 —(B)
- Когда все потери, возникающие в двигателе, таком как P SCL , потери в сердечнике, потери в меди на роторе исключены из входного сигнала, подаваемого на питание остаточная мощность преобразуется из электрической в механическую.
- Эта преобразованная мощность может быть определена как.
P CONV = P AG -P RCL = (3I 2 2 x R 2 /с) – (3I 2 2 x R R ) = 3I 2 2 R 2 (1/с – 1)
- Из уравнения А и В видно, что потери в меди (P RCL) эквивалентны мощности воздушного зазора (P AG ), умноженной на скольжение (S).
P RCL = sp AG
- Из этого уравнения видно, что потери в меди ротора прямо пропорциональны скольжению двигателя.
- Если ротор не движется, то значение скольжения будет равно единице, тогда P AG полностью израсходуется в роторе.
- Разумно, если ротор не движется, P из будет равен 0.
- Как мы обсуждали это ранее.
P CONV = P AG -P RCL
- Это обеспечит дополнительную связь между мощностью воздушного зазора (P AG ) и P conv от электрического к механическому.
P CONV = P AG -P RCL
- Подставляем значение P RCL в приведенное выше уравнение.
P CONV = P AG – sp AG
P CONV = (1-s)P AG
- 9002 выходную мощность двигателя можно определить как.
- P CR = I 9000 2
Р вых = Р conv – P F&W – P misc
- P out – это выходная мощность двигателя, которую мы получили после устранения различных потерь, возникающих в трехфазном асинхронном двигателе.
Крутящий момент в асинхронном двигателе
- Индукционный крутящий момент T ind в двигателе, объясняемый как крутящий момент, создаваемый внутренними преобразованиями электрической энергии в механическую.
- Этот крутящий момент (t) отличается от крутящего момента, фактически достигаемого в точках (терминалах) двигателя, на величину, идентичную моментам трения и ветра в двигателе.
- Значение крутящего момента определяется как.
t ind = P conv /w m
- Этот крутящий момент известен как индуцированный крутящий момент в двигателе.
- Вышеприведенное уравнение крутящего момента также может быть определено в виде потерь на скольжение и мощности в воздушном зазоре.
t ind = (1-s)P AG / (1-s)w sync
- Это уравнение особенно ценно, поскольку оно объясняет индуцированный крутящий момент (t ind ) в виде мощности воздушного зазора (P AG ) и синхронной скорости (W sync ), которая не колеблется. Информация (P AG ) следовательно прямые урожаи t ind .
Разделение P
RCL и P conv в эквивалентной цепи асинхронного двигателя
- Как мы уже говорили, мощность, поступающая от (P AG ), некоторая часть теряется в меди ротора (P RCL ) а остальное преобразуется в выходную механическую мощность.
- Возможно выделить 2 части мощности воздушного зазора (P AG ) и обозначить их четко на схеме двигателя.
(P AG ) = 3I 2 2 (R 2 /s)
P RCL = 3I 2 R x R R
- These 2 given equations приведите выражения для потерь мощности в воздушном зазоре и потерь в меди ротора.
- Мощность воздушного зазора (P AG ) — это мощность, которая будет затрачена на сопротивление величиной R 2 /с.
- Принимая во внимание, что потери в меди ротора (P RCL ) — это мощность, которая будет потрачена на сопротивление значения (R).
- Изменение среди них (P conv ), которое должно быть силой, потраченной в форме сопротивления.
R усл = (R2/S) – R 2 = R2(1/s -1)
- Соответствующая схема Per-ø с потерями в меди ротора (P RCL ) и мощностью, преобразованной в механическая часть, разделенная на отдельные компоненты, показана на схеме.
Это полная статья о мощности и крутящем моменте асинхронного двигателя, я описал уравнение и связанные термины мощности и крутящего момента. Если у вас есть какие-либо вопросы, задайте их в комментариях. Увидимся в следующем уроке «Характеристики скорости вращения асинхронного двигателя».
- P CR = I 9000 2
- P CR = I 9000 2
- P CR = I 9000 2
 потеря
потеря :
: Его входное питание представляет собой 3-х кратную схему тока (I) и напряжения (V).
Его входное питание представляет собой 3-х кратную схему тока (I) и напряжения (V).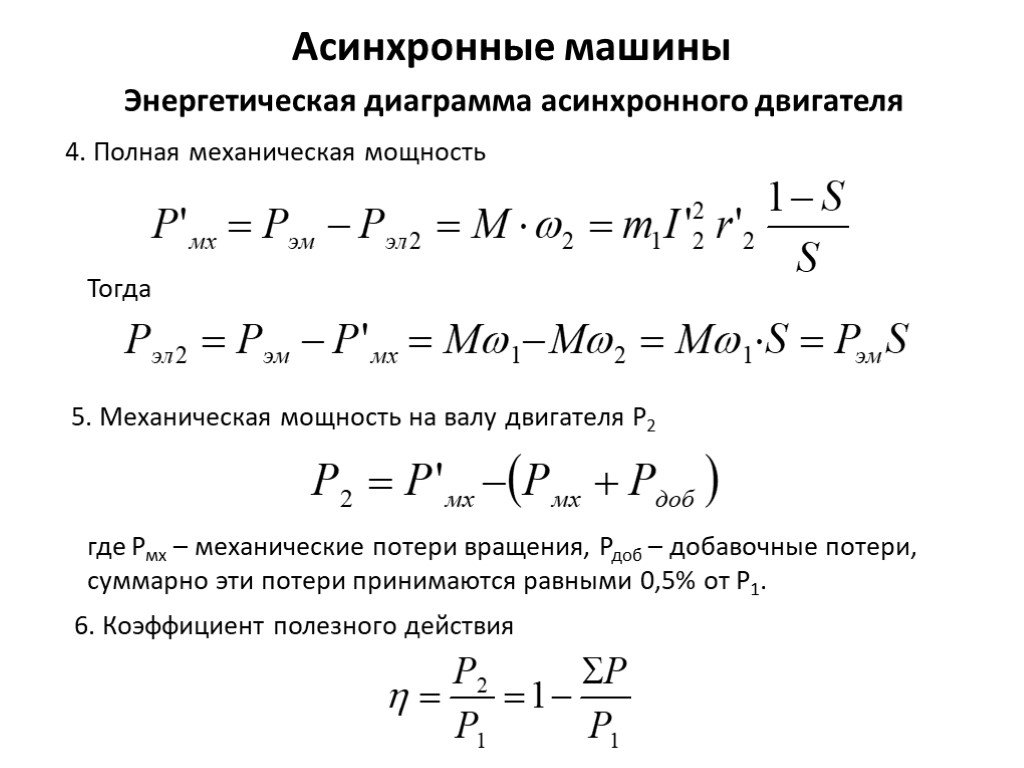
 .
.