Содержание
TMC5130 — микросхема управления компании TRINAMIC, снижаюшая шум шагового двигателя на 10 дБ
Немецкая компания TRINAMIC Motion Control анонсировала новую микросхему с интегрированными MOSFET, предназначенную для управления одноосным шаговым двигателем, и ставшую самой мощной в ее продуктовой линейке драйверов. Новые драйверы TMC5130 отдают в нагрузку пиковый ток до 2.5 А при напряжении питания 50 В, что позволяет использовать их для управления двигателями с типоразмерами от NEMA11 до NEMA23. В новых приборах использована новейшая запатентованная TRINAMIC технология, обеспечивающая тихую и свободную от вибраций работу мотора.
TMC5130 идеально подходят для средств лабораторной и офисной автоматизации, а также для любых других приложений, механизмы которых работают в непосредственной близости от человека-оператора. К оборудованию, эксплуатируемому в подобных условиях, часто предъявляются строгие требования по ограничению уровня акустических шумов. Микросхема TMC5130 стала первым устройством, в котором использована запатентованная TRINAMIC технология stealthChop, снижающая шумы и вибрации при большом крутящем моменте и низкой скорости вращения. Измерения показывают, что при использовании TMC5130 с профилем stealthChop производимый двигателем шум на 10 дБ ниже, чем с традиционными драйверами шаговых двигателей.
Измерения показывают, что при использовании TMC5130 с профилем stealthChop производимый двигателем шум на 10 дБ ниже, чем с традиционными драйверами шаговых двигателей.
Подключенный к управляющему микроконтроллеру через стандартный интерфейс SPI или интерфейс «шаг/направление», драйвер TMC5130 в реальном времени выполняет все необходимые вычисления, необходимые для управления положением и скоростью, в то время как интегрированные маломощные MOSFET непосредственно формируют токи обмоток шагового двигателя.
В микросхеме TMC5130 реализован запатентованный TRINAMIC профиль изменения тока sixPoint, минимизирующий неравномерность вращения вала. Этот профиль в фазах ускорения и замедления задает две независимые последовательности подачи на двигатель управляющих воздействий, благодаря чему уменьшаются рывки при работе мотора, и его движение становится более мягким. Профиль sixPoint также позволяет точнее управлять моментом вращения вала, чтобы привести его в соответствие с требованиями конкретного приложения, оптимизировав скорость и время разгона.
Для разработки приложения, создания макета, оптимизации конструкции и ускорения вывода конечного продукта на рынок TRINAMIC предлагает комплект средств разработки с интуитивно понятным программным интерфейсом и оценочной платой TMC5130.
Источник: http://kazus.ru/lenta/view/0_7951_0.html
Новости компании
Выступление профессора Шалумова по виртуальным испытаниям автомобильной электроники
7 декабря 2022 г.
Тема доклада: «Виртуальные испытания автомобильной электроники на внешние воздействия и надёжность в российской САПР АСОНИКА».
читать
Введены в действие первые национальные стандарты в области виртуальных испытаний электроники, разработанные НИИ «АСОНИКА»
17 октября 2022 г.
Это позволит создавать высоконадёжную отечественную электронику с минимальными затратами и в минимальные сроки
читать
Выступление профессора Шалумова в Совете Федерации о состоянии САПР электроники в России
11 октября 2022 г.
Выступление состоялось 6 октября 2022 г. в Совете Федерации. Тема семинара-совещания — «IT-отрасль: состояние, проблемы, перспективы».
читать
Все новости компании
Семейство драйверов шаговых двигателей AMIS-30xxx от ON Semiconductor
Шаговые двигатели в настоящее время имеют широкий ряд применений. Они используются в механических приводах многих устройств, таких как компьютерная периферия, видео- и цифровые камеры, автомобильные зеркала, камеры охранного наблюдения, текстильное оборудование, системы жизнеобеспечения и т.д. До недавнего времени компания ON Semiconductor не производила микросхемы драйверов биполярных шаговых двигателей, которые могли бы составить конкуренцию известным производителям — Allegro Microsystems, STMicroelectronics, TI, Toshiba, Infineon и др.
Ситуация изменилась после того, как ON Semiconductor приобрела в декабре 2007 г. компанию AMI Semiconductor (AMIS), широко известную разработкой и производством заказных и специализированных ИС для автомобильного, медицинского и промышленного секторов рынка. Продукция этой фирмы характеризуется высоким качеством и уровнем интеграции аналоговой и цифровой технологий. Разработки AMI Semiconductor сохранили свой индекс в названиях — AMIS, но теперь выпускаются под брендом ON Semi. Одной из удачных разработок компании в 2005 г. стала серия драйверов для шаговых двигателей AMIS-30xx. По сути, она ознаменовала очередной этап эволюции архитектуры и технологии драйверов шаговых двигателей (ШД). Для того чтобы по достоинству оценить уровень разработок AMIS, рассмотрим процесс эволюции микросхем для ШД от различных производителей.
Продукция этой фирмы характеризуется высоким качеством и уровнем интеграции аналоговой и цифровой технологий. Разработки AMI Semiconductor сохранили свой индекс в названиях — AMIS, но теперь выпускаются под брендом ON Semi. Одной из удачных разработок компании в 2005 г. стала серия драйверов для шаговых двигателей AMIS-30xx. По сути, она ознаменовала очередной этап эволюции архитектуры и технологии драйверов шаговых двигателей (ШД). Для того чтобы по достоинству оценить уровень разработок AMIS, рассмотрим процесс эволюции микросхем для ШД от различных производителей.
Начало внедрения шаговых двигателей
Шаговые двигатели были разработаны в начале 1960 гг. как более дешевая альтернатива позиционным сервоприводам для применения на растущем рынке периферийных компьютерных устройств. Главное преимущество ШД — обеспечение точного позиционирования без применения датчиков положения обратной связи. Это преимущество значительно снизило цену систем приводов компьютерной периферии и сделало ее массовым и доступным изделием. По мере совершенствования параметров, удешевления производства, а также упрощения и удешевления схем управления шаговые двигатели завоевали популярность и в других приложениях.
По мере совершенствования параметров, удешевления производства, а также упрощения и удешевления схем управления шаговые двигатели завоевали популярность и в других приложениях.
Биполярные и униполярные шаговые двигатели
Униполярные двигатели проще в управлении и требуют меньше управляющих элементов. Ранее этот фактор имел решающее значение в цене готового решения. После того, как значительно повысился уровень интеграции и снизилась цена микросхем драйверов, униполярные шаговые двигатели потеряли это преимущество. Если сравнивать их между собой, то биполярный ШД имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент, который пропорционален магнитному полю, создаваемому обмотками статора. Именно биполярные шаговые двигатели в основном выпускаются производителями.
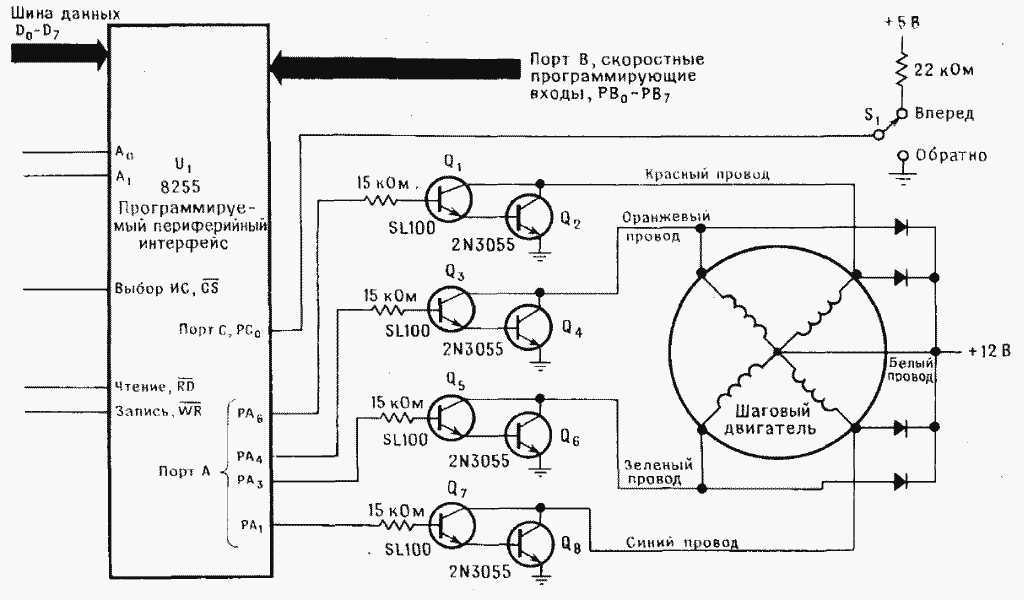
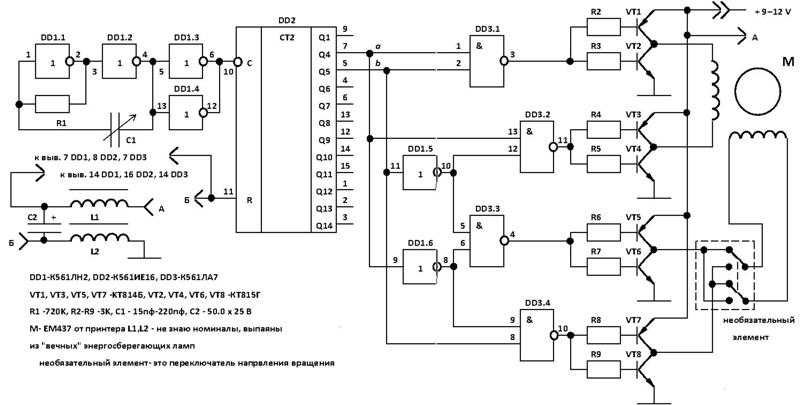
Схема управления биполярным шаговым двигателем
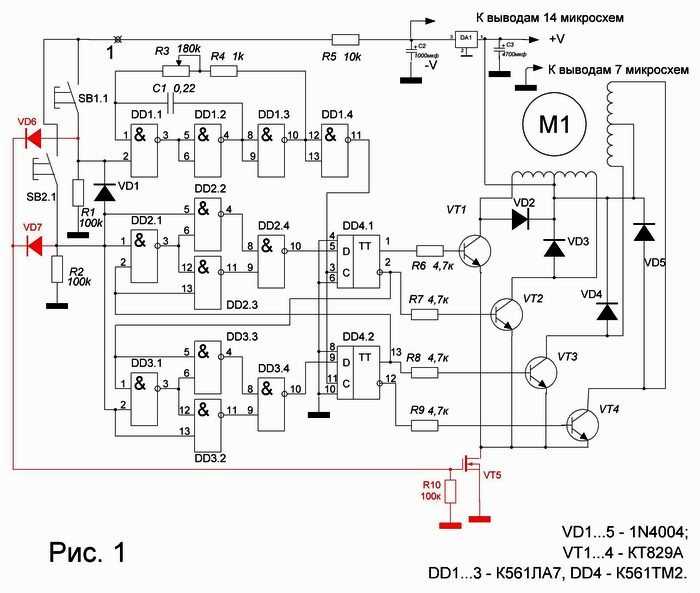
Двигатель имеет две обмотки, каждая из которых управляется мостовой схемой ключей. На рисунке 1 показана базовая схема управления биполярным шаговым двигателем.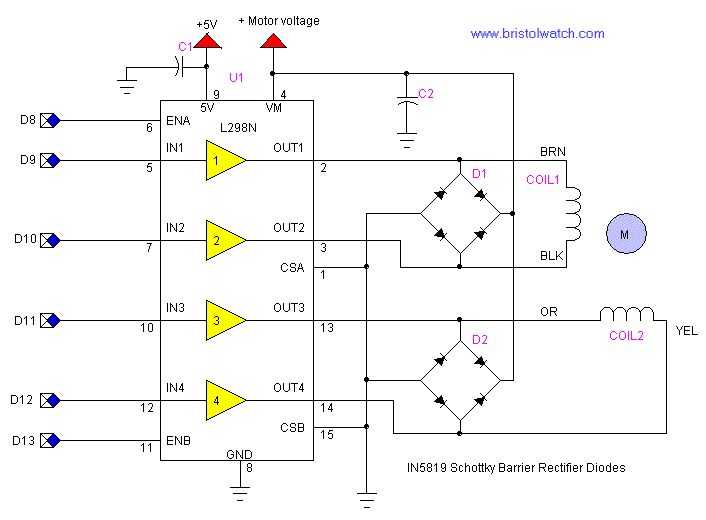
Для требуемой фазировки токов через обмотки внешняя схема должна обеспечить синхронное управление ключами двух мостовых схем. Первые схемы управления шаговыми двигателями были реализованы полностью на дискретных элементах и микросхемах комбинационной логики.
Рис. 1. Базовая схема управления биполярным шаговым двигателем |
Первый этап интеграции драйверов шагового двигателя
Первым этапом интеграции стала реализация в одном корпусе элементов моста и простой логики управления его ключами. Примером такой микросхемы является UC3717 фирмы Unitrode (в настоящее время часть TI), которая была разработана до 1995 г. Для управления двигателем требовалось использовать две такие микросхемы и внешний контроллер шаговых перемещений. Применялся линейный токовый режим с большими потерями мощности на обмотках и биполярных транзисторах.
Компания Infineon примерно в то же время (1996 г.) стала выпускать микросхему драйвера SAA1042, в котором были интегрированы сразу две мостовых схемы, логика управления двумя мостовыми схемами, тактовый генератор, логика управления поворота на шаг и полшага, а также защитные диоды. К тому же времени компания Motorola разработала драйвер MC3479, аналогичный по структуре SAA1042.
К тому же времени компания Motorola разработала драйвер MC3479, аналогичный по структуре SAA1042.
Датчики токовой перегрузки
В структуру драйвера стали вводить датчики выходного тока для слежения за токовой перегрузкой в мостовых схемах. Примером такого драйвера явилась микросхема TLE4729G Infineon. Контроль тока производился отдельно в каждом мосту (в нижнем плече) через внешний резистивный датчик. Сигналы перегрузки по каждому каналу управления обмотками были доступны внешнему управляющему контроллеру в виде сигналов ошибки (открытый коллектор).
Уменьшение потерь мощности и защита от перегрузок
На следующем этапе эволюции структуры драйвера для снижения потерь в мостовых схемах биполярные транзисторы заменили на DMOS. Кроме того, стал использоваться метод ШИМ токового управления, который позволил значительно уменьшить рассеиваемую на драйвере мощность. В структуре драйвера появились схемы защиты от перегрузки по току и перегрева кристалла, схемы обнаружения обрыва обмоток и короткого замыкания. Был добавлен режим энергосбережения.
Был добавлен режим энергосбережения.
Микрошаговое управление
На рисунке 2 показаны диаграммы сигналов управления обмотками шагового биполярного двигателя для различных режимов. Обычно используется полношаговый или полушаговый режимы. Драйверы для их поддержки существенно проще и дешевле.
Рис. 2. Диаграммы сигналов для управления шаговым двигателем |
Микрошаговый режим позволяет осуществлять дробление основного шага на несколько позиций и получать непосредственно без редуктора большую точность позиционирования вала двигателя. Allegro Microsystems была первой фирмой, которая разработала и начала серийный выпуск недорогих интегральных драйверов SLA7042M и SLA7044M для двигателей, которые поддерживали режим микрошагового управления (1996 г.).
Упрощение интерфейса управления
На следующем этапе в структуру драйвера была добавлена логика, которая упростила управление двигателем и снизила нагрузку на внешний контроллер. Отныне для управления вращением вала на один шаговый угол требовались всего два сигнала — сигнал направления DIR и тактовый сигнал CLK (или NXT), задающий скорость вращения. Этот интерфейс впервые появился у драйверов Allegro Microsystems и в дальнейшем стал использоваться в драйверах других производителей.
Отныне для управления вращением вала на один шаговый угол требовались всего два сигнала — сигнал направления DIR и тактовый сигнал CLK (или NXT), задающий скорость вращения. Этот интерфейс впервые появился у драйверов Allegro Microsystems и в дальнейшем стал использоваться в драйверах других производителей.
Обратная связь. Датчик рассогласования угла поворота вала
Шаговые двигатели имеют ряд особенностей управления, связанных с инерционностью вала двигателя с нагрузкой и дискретностью движений вала. После выполнения каждого шага под управлением токовых импульсов, поданных на обмотки, производилась фиксация вала за счет закорачивания цепей обмоток (режим Slow) или переполюсовки сигналов для более быстрой фиксации (Fast) (см. рис. 3).
Рис. 3. Режимы переключения мостовой схемы драйвера |
При большой нагрузке на валу, а также при большой скорости вращения могли возникать паразитные явления — проскок на шаг вперед, пропуск шага или полное заклинивание двигателя, а также резонансные явления, когда двигатель находился на границе допустимых режимов. Для преодоления этих недостатков потребовалась обратная связь, возможность изменять режимы управления фазами разгона и торможения при выполнении шага и др.
Для преодоления этих недостатков потребовалась обратная связь, возможность изменять режимы управления фазами разгона и торможения при выполнении шага и др.
Адаптация параметров управления
После оценки сигнала обратной связи можно выработать стратегию для изменения параметров управляющих сигналов. Например, если ситуация соответствует зоне проскока на шаг вперед, значит, для данного скоростного режима недостаточна сила торможения. В этом случае можно уменьшить ток активной фазы или использовать режим быстрого торможения. В руководстве по драйверам приводятся методики для выбора оптимальных параметров управления. Для адаптации параметров управляющих сигналов под конкретные параметры двигателя и режим движения, а также возможности динамической подстройки параметров сигналов для устранения потери шага, резонансного эффекта, повышения динамики на больших скоростях был добавлен последовательный интерфейс и соответствующие схемы цифровой регулировки параметров. Параметры загружались в соответствующие режимные регистры. Этот уровень был впервые использован в микросхемах драйверов Allegro Microsystems, а затем появился в структурах драйверов STMicroelectronics, TI, Infineon.
Этот уровень был впервые использован в микросхемах драйверов Allegro Microsystems, а затем появился в структурах драйверов STMicroelectronics, TI, Infineon.
Драйверы четвертого поколения
К началу разработки компанией AMIS своей архитектуры драйверов на рынке уже присутствовали драйверы шаговых двигателей, которые имели, с одной стороны, достаточно высокий уровень интеграции, а с другой — набор функциональных параметров, обеспечивавших реализацию оптимальной и дешевой схемы управления. В качестве примера такого драйвера можно привести драйвер-контроллер А3992 Allegro Microsystems. Для его управления использовался ШИМ, в мостовых схемах — полевые ключи; были реализованы различные типы защит от перегрузок. Загрузка параметров и управление движением производилась через последовательный интерфейс. Поддерживался режим микрошага. В обеих мостовых схемах использовались два внешних резистивных токовых датчика для контроля перегрузки. Для улучшения формы кривой при микрошаговом режиме в А3977 применялось автоматическое изменение режима спада тока в зависимости от текущего микрошага (Mixed Decay Mode).
Архитектура серии драйверов AMIS-30xxx
При ее разработке требовалось создать модульную архитектуру для реализации линейки микросхем с функциональными параметрами, ориентированными на различные варианты применения с разными уровнями цен. Степень интеграции и функциональности должна была соответствовать лучшим на то время образцам интегральных драйверов-контроллеров. В архитектуре требовались модули, обеспечивавшие расширенные функциональные возможности. На рисунке 4 показана модульная архитектура линейки драйверов AMIS-30xxx.
Рис. 4. Архитектура микросхем драйверов AMIS-30xxx |
Белые поля соответствуют резидентным модулям, которые присутствуют во всех микросхемах семейства. Цветными полями маркированы необязательные модули, определяющие специфику и назначение микросхемы драйвера. В семейство AMIS-30xxx входит семь микросхем (A–G), различающихся интерфейсом управления, поддержкой некоторых функций и электрическими характеристиками (см.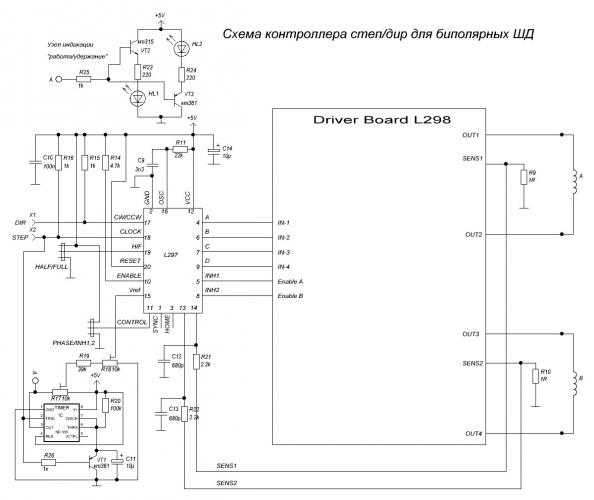 табл. 1).
табл. 1).
Размер микрокорпуса NQFP32 — всего 7×7мм. Семейство образовано двумя сериями драйверов AMIS-305xx (четыре микросхемы) и AMIS-306xx (три микросхемы). Они отличаются некоторыми функциональными элементами, применением и, что особенно важно, ценой.
Таблица 1. Основные технические характеристики однокристальных драйверов/контроллеров ШД компании ON Semiconductor
Характеристика | Линейка драйверов | ||||||
| 30511 | 30512 | 30521 | 30522 | 30622 | 30623 | 30624 |
Диапазон напряжений питания, В | 6…30 | 8…29 | 6…30 | ||||
Средний выходной ток, А | 0,4 | 0,8 | 0,4 | 0,57 | 0,4 | ||
Импульсный выходной ток, А | 0,8 | 0,8 | 1,6 | 1,6 | 0,8 | ||
RDS(on) (25°С), Ом | 0,45 | 0,5 | |||||
Частота коммутации ШИМ, кГц | 45 | ||||||
Контроллер позиционирования | Нет | Есть | |||||
Макс. | 1/32 | 1/16 | |||||
Интерфейс | SPI | I2C | LIN | I2C | |||
Встроенный стабилизатор напряжения (5 В) для питания внешних схем | — | Есть | — | Есть | |||
Рабочий температурный диапазон, °C | -40…125 | ||||||
Типы корпусов | SOIC24 | NQFP32 | SOIC20 | SOIC20, NQFP32 | SOIC20 | ||
 уровень дискретности режима микрошага
уровень дискретности режима микрошагаОсобенности серии AMIS-305xx
Первая серия микросхем AMIS-305xx (см. рис. 5) имеет простой пошаговый режим управления движения валом. При разработке большинства современных приложений она может служить отличной и недорогой альтернативой драйверам Allegro Microsystems, Infineon, Toshiba, TI, National Semiconductor, ROHM, обеспечивая функциональную совместимость. Их интерфейс управления образован последовательным портом SPI для конфигурирования и мониторинга и специализированными линиями ввода-вывода, в т.ч. для управления ШД.
рис. 5) имеет простой пошаговый режим управления движения валом. При разработке большинства современных приложений она может служить отличной и недорогой альтернативой драйверам Allegro Microsystems, Infineon, Toshiba, TI, National Semiconductor, ROHM, обеспечивая функциональную совместимость. Их интерфейс управления образован последовательным портом SPI для конфигурирования и мониторинга и специализированными линиями ввода-вывода, в т.ч. для управления ШД.
Рис. 5. Структурная схема ASSP AMIS-305xx |
Пошаговая система управления производится в данной серии двумя сигналами. DIR (direction) определяет направление вращения, а сигнал на входе NXT (Next) подается в качестве команды для выполнения очередного шага поворота вала. Скорость движения и режим дробления шага устанавливаются предварительно через режимные регистры драйвера.
Работая совместно с внешним микроконтроллером, ИС AMIS305xx выполняет преобразование заданной команды управления путем генерации на выходе драйверного каскада ШИМ-сигналов.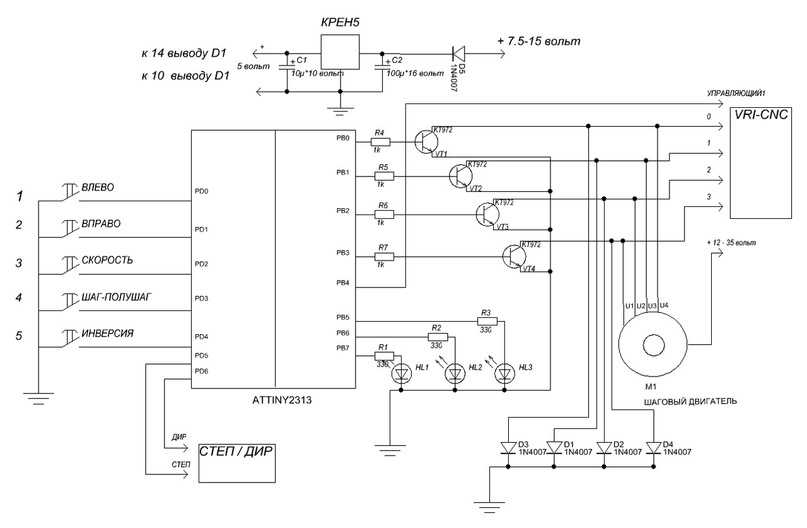 Важным преимуществом AMIS-305xx является реализация слежения за рассогласованием угла поворота вала за счет контроля сигнала противо-ЭДС на обмотках двигателя через вывод SLA. Эта функция открывает широкие возможности по контролю и анализу работы ШД, обнаружению пропуска шага и возврата на шаг назад, введению обратных связей по положению и скорости, не требуя применения каких-либо дополнительных внешних компонентов.
Важным преимуществом AMIS-305xx является реализация слежения за рассогласованием угла поворота вала за счет контроля сигнала противо-ЭДС на обмотках двигателя через вывод SLA. Эта функция открывает широкие возможности по контролю и анализу работы ШД, обнаружению пропуска шага и возврата на шаг назад, введению обратных связей по положению и скорости, не требуя применения каких-либо дополнительных внешних компонентов.
Характеристики серии AMIS-306xx
Серия имеет три характерных отличия от AMIS-305xx:
1) в микросхеме через последовательный интерфейс реализована поддержка управления движением на уровне команд позиционирования;
2) в структуре имеется контроллер позиционирования, состоящий из программируемых счетчиков и регистров;
3) слежение за рассогласованием угла вала выполняется автоматически и не требует дополнительной программной поддержки. Используется тот же сигнал противо-ЭДС и интегрированный автомат, изменяющий динамические параметры сигналов управления.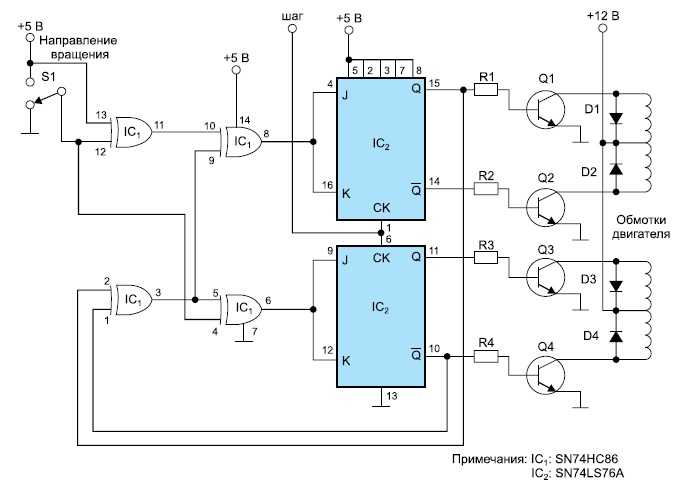
Рис. 6. Структурная схема драйвера |
Контроллер позиционирования обеспечивает управление разгоном и замедлением двигателя по определенной диаграмме скорости с программируемыми значениями минимальной и максимальной скорости, ускорения/замедления, для определения исходного положения ротора и перевода его в заданное положение, а также для контроля состояния внешнего контакта на входе SWI. Вход SWI можно использовать при отладке рабочих режимов или в штатном режиме типа концевика. Вход подключен к отдельному механическому замыкателю/концевику, связанному с валом. При прохождении заданной позиции вала, когда происходит замыкание/размыкание механического ключа, это состояние транслируется по последовательному интерфейсу в управляющий внешний контроллер и может быть использовано для контроля точности работы позиционирования или в качестве опорной точки для калибровки прохождения заданного угла, или точки реверса движения вала.
Программирование траектории движении
Драйвер AMIS-306xx управляется командами высокого уровня, которые подаются через I2C или LIN-интерфейс. Алгоритм управления AMIS-306XX реализован в виде конечного автомата, т.е. разработчику следует подать команду переместить двигатель в определенное положение, предварительно задав необходимое ускорение и максимальную скорость, а также требуемый размер микрошага.
Фазы разгона и торможения
Определяются рядом уровней нарастающих или спадающих напряжений, которые будут использоваться при выполнении соответствующей фазы по команде, поданной через сетевой интерфейс. Хост-контроллер при этом освобождается от локального контроля данных процессов. Для контроля используется встроенный запрограммированный пользователем автомат. Заданы начальные и конечные точки процессов, определены ряды значений, устанавливающие степень ускорения и торможения.
Выбор: AMIS-305xx или AMIS-306xx?
Следует учесть, что драйверы AMIS-306xx стоят дороже, чем AMIS-305xx. Выбор за разработчиком. Собственно, наличие счетчика числа шагов не всегда облегчает задачу, если в устройстве так или иначе используется микроконтроллер либо DSP. Расчет траектории производится программно. В большинстве приложений ресурс управляющего микроконтроллера достаточен для того, чтобы решать сложные задачи в реальном масштабе времени. Поскольку не во всех случаях потребуются предельные режимы движения шагового двигателя, то не понадобится и сложный алгоритм управления динамическими параметрами драйвера. Реализованный в микросхеме интерфейс SPI можно использовать для задания таких параметров драйвера как амплитуда тока, шаговый режим, частота ШИМ. Микросхема драйвера, в свою очередь, передает в микроконтроллер статусы флагов состояния. В состав обоих семейств драйверов шаговых двигателей ON Semiconductor входит обратная связь, которая позволяет сравнивать электрическое и расчетное положение ротора, что можно использовать для контроля функционирования двигателя.
Выбор за разработчиком. Собственно, наличие счетчика числа шагов не всегда облегчает задачу, если в устройстве так или иначе используется микроконтроллер либо DSP. Расчет траектории производится программно. В большинстве приложений ресурс управляющего микроконтроллера достаточен для того, чтобы решать сложные задачи в реальном масштабе времени. Поскольку не во всех случаях потребуются предельные режимы движения шагового двигателя, то не понадобится и сложный алгоритм управления динамическими параметрами драйвера. Реализованный в микросхеме интерфейс SPI можно использовать для задания таких параметров драйвера как амплитуда тока, шаговый режим, частота ШИМ. Микросхема драйвера, в свою очередь, передает в микроконтроллер статусы флагов состояния. В состав обоих семейств драйверов шаговых двигателей ON Semiconductor входит обратная связь, которая позволяет сравнивать электрическое и расчетное положение ротора, что можно использовать для контроля функционирования двигателя.
Драйвер AMIS-30621 идеально подходит для позиционирования подвижных элементов небольших устройств. Его основные приложения: коррекция угла наклона ламп в автомобильных фарах, кондиционеры, привод холостого хода двигателей, механика систем круиз-контроля, промышленное оборудование, устройства домашней автоматизации.
Его основные приложения: коррекция угла наклона ламп в автомобильных фарах, кондиционеры, привод холостого хода двигателей, механика систем круиз-контроля, промышленное оборудование, устройства домашней автоматизации.
Концепция интеллектуального шагового двигателя
Достигнутый благодаря новой технологии уровень интеграции позволил получить миниатюрный драйвер и уменьшить число сигналов управления. Возможность объединения в одной ИС аналоговых и силовых каскадов на повышенные напряжения, а также низковольтных цифровых каскадов сделало возможным появление полностью интегрированных контроллеров ШД. Собственно двигатель получил цифровой интерфейс. Реализованные на базе таких ИС платы контроллеров обладают столь малыми размерами, что становятся частью двигателя, который в таком случае можно назвать интеллектуальным.
Для реализации концепции умного двигателя нашлись и партнеры. Достигнута предварительная договоренность с крупнейшими производителями биполярных шаговых двигателей японских фирм NMB (Nippon Minebea), Shinano Kenshi, Oriental Motors, Nidec Servo Corp.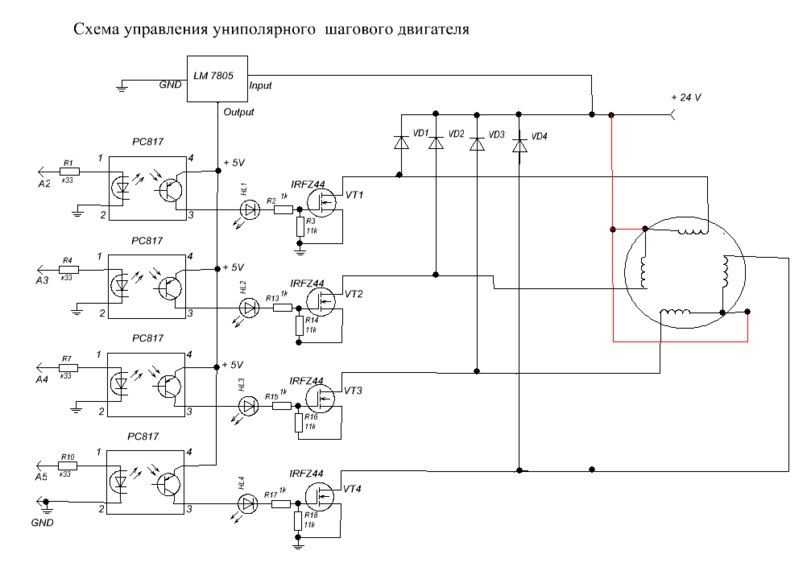 , Moons о заказе драйверов AMIS. Впечатляет и объем выпуска шаговых двигателей этими фирмами — свыше 100 млн шт. в год! В программе выпуска будут использоваться драйверы AMIS30624 (i2C), AMIS30623 (LIN) и AMIS-30523 (CAN).
, Moons о заказе драйверов AMIS. Впечатляет и объем выпуска шаговых двигателей этими фирмами — свыше 100 млн шт. в год! В программе выпуска будут использоваться драйверы AMIS30624 (i2C), AMIS30623 (LIN) и AMIS-30523 (CAN).
Своими разработками AMI Semiconductor значительно расширила спектр предложений для данного сегмента рынка, получив реальные шансы потеснить на рынке драйверов шаговых двигателей других крупнейших производителей.
Литература
1. К. Староверов. Интегральные решения ON Semiconductor для управления шаговыми двигателями//Новости электроники №5, 2009.
2. О. Пушкарев. Драйверы шаговых двигателей фирмы Allegro//Современная электроника, декабрь 2004.
3. Datasheet AMIS-30621 and AMIS−30622 Products//www.onsemi.com.
4. Datasheet AMIS-30623 and AMIS−30624 Products//www.onsemi.com.
5. AMIS-30621 Micro-Stepping Motor Driver Datasheet OnSemi//Industries, LLC, 2009 August, 2009 − Rev. 2.
Драйверы шаговых двигателей
Интегрированные драйверы и контроллеры шаговых двигателей.
Войдите в свою учетную запись onsemi, чтобы увидеть ваши любимые сохраненных фильтров .
Зарегистрируйтесь сейчас
Сертифицировано AEC
Без галогенидов
Без свинца
Поддержка PPAP
Инвертировать значение диапазона
Инвертировать значение диапазона
0
Инвертировать значение диапазона0003
Значение диапазона инвертирования
Значение диапазона инвертирования
—
1/128
1/16
1/2
1/32
1/64
~ Na ~
Clock
I2C
LIN
Параллель
SPI
Serial
Внешний
Внешний резистор
Полностью интегрированный
~ NA ~
Open Coil
~
Thermal
Uvlo
~
Uvlo
~
~
Uvlo
~
~
Uvlo
~
~
~
0003
NQFP-32
QFN-32
QFN-44
QFN-48
QFNW-24
QFNW-32
SIP-19
SOIC-20W
SOIC-24
SOIC-8 NB
WLCSP-10
WLCSP-40
WLCSP-8
Значение диапазона инверта
Загрузка . ..
..
Последние поставки
Внешний резистор
QFN-44
. Внешний резистор
Thermal
QFN-48
Подробнее
Последние поставки
Полностью интегрированные
Over-Current
SOIC-24
Более подробная информация
Последняя партия
Полностью интегрированные
Thermal
NQ-
.
Подробнее
Последние поставки
Полностью интегрированный
Тепловой
NQFP-32
Подробнее
Последние поставки
Полностью интегрированный
Over-Current
NQFP-32
Подробнее
Последние поставки
Полностью интегрированные
Thermal
QFN-32
Подробнее
Последняя суда
Консультационные продажи
.
Максимальный ток,
Открытая катушка,
UVLO
SOIC-8 NB,
NQFP-32
Подробнее
Последние поставки
20003
Полностью интегрированный
UVLO,
OPEN COIL
SOIC-20W,
NQFP-32
Подробнее
NQFP-32,
.
Подробнее
Последние поставки
Полностью интегрированные
UVLO,
Over-Current,
Thermal
SOIC-20W,
NQFP-32
больше.
Active
0003
Serial
WLCSP-40
More Details
Active
Serial
WLCSP-10
More Details
Active
Serial
WLCSP-10
More Details
Active
Серийный номер
WLCSP-8
Подробнее
Активный
Полностью интегрированный
Открытый теплообменник
QFNW-32
Активный
Подробнее0002 Fully Integrated
Open Coil
QFNW-24
More Details
Active
Fully Integrated
Open Coil
QFNW-32
More Details
Active
Fully Integrated
QFNW-32
Подробнее
Последние поставки
Полностью интегрированный
Термический
SIP-19
Подробнее
Последние поставки
Полностью интегрированный
Термальный
SIP-19
Подробнее
Последние поставки
Полностью интегрированные
Over-Current
SIP-19
Подробнее
Последние отгрузки
Полностью интегрированный
Thermal
SIP-1
More
Детали
Последние поставки
Полностью интегрированные
Сверхтоковые
SIP-19
Подробнее
Последние поставки
Полностью интегрированные
Тепловые
SIP-19
Подробнее
Последние поставки
Полностью интегрированные
Thermal
SIP-19
Подробнее
Последние поставки
Over Current
SIP-1
MAR Детали
Последние поставки
Полностью интегрированные
Сверхтоковые
SIP-19
Подробнее
Последние поставки
Полностью интегрированные
2 Открытая катушка0003
SIP-19
Подробнее
Последние поставки
Полностью интегрированные
Thermal
SIP-19
Подробнее
Последние поставки
SIP
Полностью интегрированные
Thermal
SIP-10003
Подробнее
Последние поставки
Параллельный
Полностью интегрированный
SIP-19
Подробнее
Последние поставки
Внешний
SIP-19
More Details
Loading.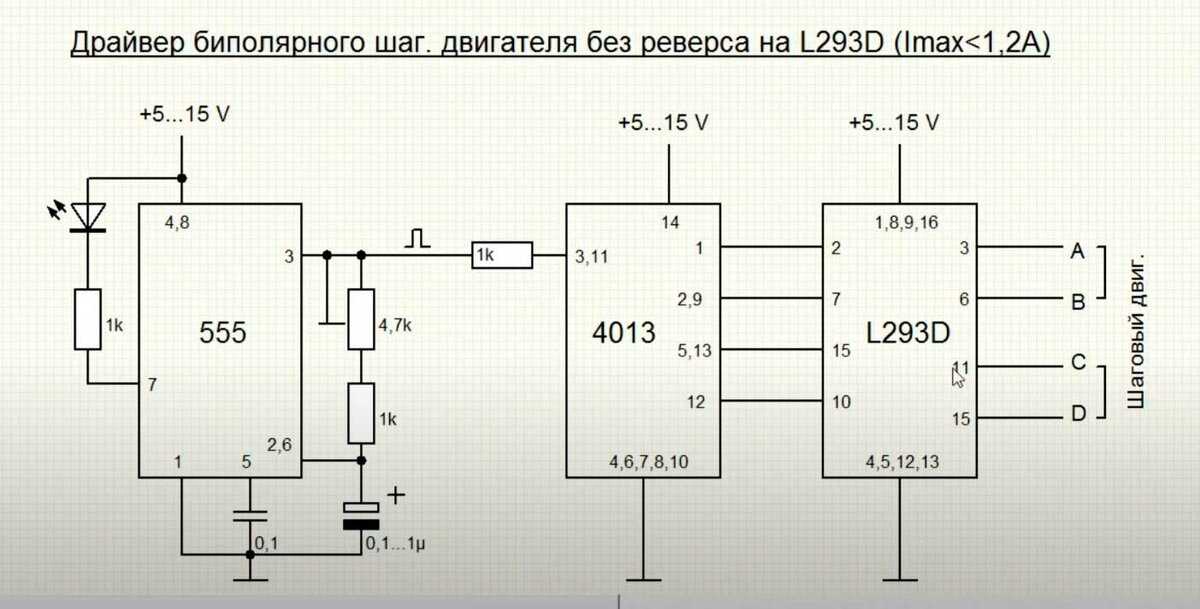 ..
..
Printer Friendly Version
PDF Format
Excel Format
CSV Format
Close Search
Product Groups:
33
┗
Orderable Детали:
45
Загрузка…
Привет, я пришел с миром!
Я ваш дружелюбный помощник по веб-сайтам, и я был создан, чтобы помочь вам ориентироваться на нашем веб-сайте и показать вам наши полезные функции. Я постараюсь найти то, что вам нужно!
Приятного посещения.
Фильтры
Если вы хотите удалить какой-либо фильтр, нажмите X рядом с ним. Фильтр будет удален после сохранения изменений. Вы сделали ошибку? Нажмите серую кнопку с удаленным фильтром еще раз, и он вернется.
Проверка состояния запасов
Запасы не найдены
Обратитесь в отдел продаж
Powered by
Интегральные схемы (ИС) — Trinamic
Микросистемы Trinamic подходят для всех приложений, требующих управления двигателем и движением. Их продукты устанавливают стандарт производительности для таких приложений, как цифровое производство, Интернет вещей, медицинские устройства, робототехника, автоматизация лабораторий, промышленные приложения и приложения с питанием от аккумуляторов.
Их продукты устанавливают стандарт производительности для таких приложений, как цифровое производство, Интернет вещей, медицинские устройства, робототехника, автоматизация лабораторий, промышленные приложения и приложения с питанием от аккумуляторов.
Небольшие, бесшумные, точные и чрезвычайно эффективные с потреблением тока в режиме ожидания <50 нА (тип.) драйверы двигателей Trinamic с питанием от батарей устанавливают стандарт для Интернета вещей, домашней автоматизации и портативных устройств. Вместе с самым низким в своем классе RDson LS 170 мОм и HS 170 мОм (тип.) эти ИС драйвера двигателя экономят срок службы батареи, как никакие другие.
| TMC2300-LA | 1 | 2…11V | yes | yes | 1…256 | QFN20 (3×3) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| TMC6300-LA | 1 | 2…11V | 1.4A | QFN20 (3×3) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| TMC7300-LA | 2 | 2…11V | 2.0A | Да | Да | Да | Да | Да | QFN20 (3×3). единый пакет, включающий предварительные драйверы, датчики, схемы защиты и силовые мосты. Эти микросхемы драйверов шаговых двигателей позволяют создавать мощные, гибкие конструкции с сильноточным профилем, идеально подходящим для двигателя, и значительно снижают сложность конструкции и время разработки.
Gate driver ICs for stepper motors allow for flexible designs with a high current profile using external MOSFETs. Разработанные с предварительным драйвером, обеспечивающим полную диагностику через SPI, драйверы шаговых затворов идеально подходят для экономии времени и средств за счет снижения сложности конструкции. Благодаря лучшему в отрасли управлению током все предварительные драйверы шаговых двигателей Trinamic обеспечивают плавное и точное микрошаговое управление, повышая при этом надежность и надежность всей конструкции системы.
Чипы cDriver™ от Trinamic представляют собой интегрированные решения с контроллером движения и драйвером в одном устройстве, преобразующие цифровую информацию в физическое движение. Они сочетают сложный генератор рампы для автоматического позиционирования цели с самым совершенным в отрасли драйвером шагового двигателя. Высокоинтегрированный и энергоэффективный компактный cDriver™ позволяет создавать миниатюрные и масштабируемые системы для экономичных решений.
Специальные контроллеры движения и интерфейсов для шаговых двигателей разгружают микроконтроллер от критических задач в реальном времени, вычисляя линейное изменение и позиционирование на проверенном интегрированном оборудовании, которое является безопасным и надежным. Единый двунаправленный интерфейс SPI для управления движением и диагностики позволяет сократить количество необходимых трасс отведений, что позволяет создавать чрезвычайно миниатюрные и компактные конструкции.
ethercate-высокий уровень. . Используя микросхемы подчиненного контроллера EtherCAT от Trinamic, этот мощный интерфейс можно комбинировать с передовыми системами управления двигателем и движением. Чипы подключают периферийные устройства, оптимизированные для встроенных приложений управления движением и двигателем, к быстрой полевой шине, обеспечивая точную синхронизацию распределенных приводов.
Двигатели постоянного тока все чаще используются в приложениях, где важна ЭМС, а также в приложениях с самыми высокими требованиями к энергоэффективности. Благодаря синусоидальной коммутации бесщеточные двигатели постоянного тока образуют бесшумные и эффективные приводы для отопления и вентиляции.
Trinamic’s integrated 3-phase driver ICs for brushless DC and PMSM motors allow you to design highly efficient drives.
ИС драйвера двигателя постоянного тока Trinamic объединяют в себе высокоэффективный силовой каскад с внутренним зарядовым насосом, обеспечивающий лучшее в своем классе сопротивление RDSON. Даже при низком напряжении питания крошечные микросхемы драйвера двигателя обеспечивают высокий ток для достижения наилучших результатов. |
 2″> 1.2A
2″> 1.2A 4″> 1.4A
4″> 1.4A 0A
0A 4″> 1.4A
4″> 1.4A 5″ data-value-desc=»36″> 4.5…36V
5″ data-value-desc=»36″> 4.5…36V 1″> 1.1A
1″> 1.1A 4″> 1.4A
4″> 1.4A
 5)
5) 1″> 1.1A
1″> 1.1A 1″> 1.1A
1″> 1.1A 5″ data-value-desc=»36″> 4.5…36V
5″ data-value-desc=»36″> 4.5…36V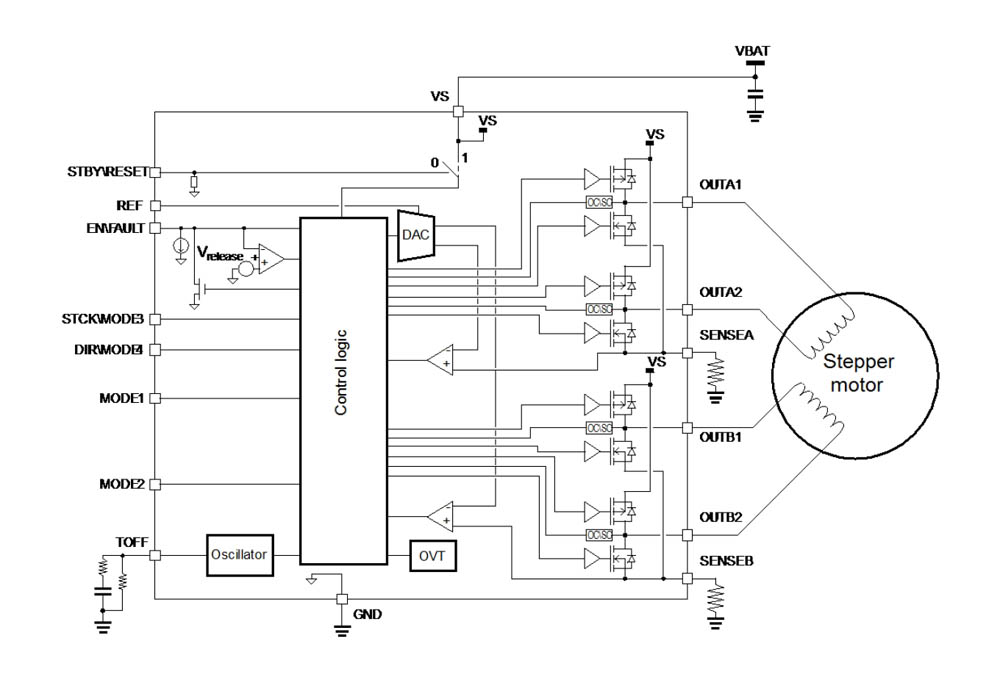 Некоторые также поддерживают S/D для упрощения управления шаговыми двигателями.
Некоторые также поддерживают S/D для упрощения управления шаговыми двигателями.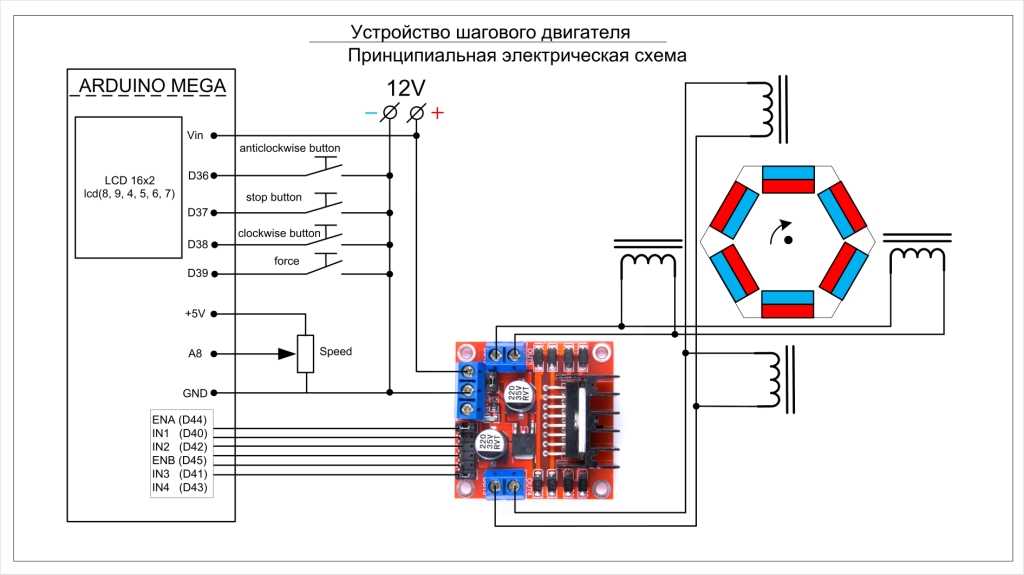 5×10.5)
5×10.5)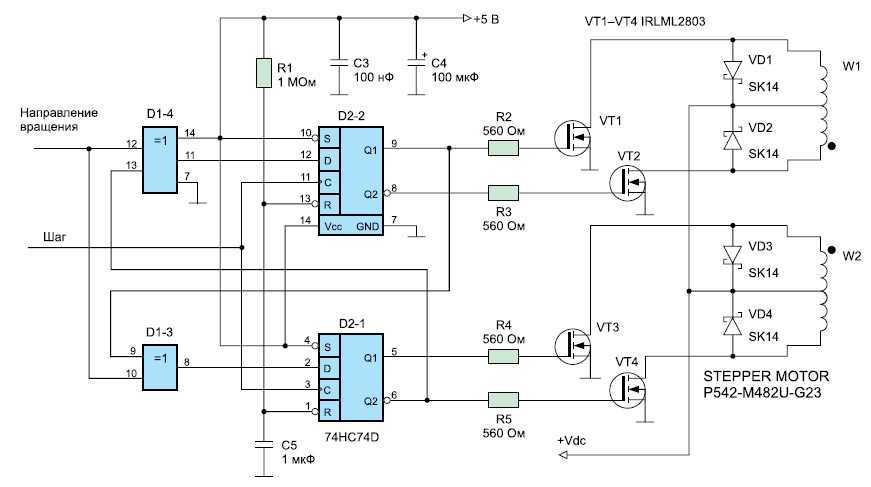 Обладая ориентированным на поле управлением, интегрированным в надежные строительные блоки, ИС контроллера позволяют быстро внедрять динамические сервосистемы. Благодаря тому, что все критичные ко времени вычисления выполняются аппаратно, полностью интегрированные ИС сервоконтроллера значительно сокращают время разработки приложений с выдающейся динамикой.
Обладая ориентированным на поле управлением, интегрированным в надежные строительные блоки, ИС контроллера позволяют быстро внедрять динамические сервосистемы. Благодаря тому, что все критичные ко времени вычисления выполняются аппаратно, полностью интегрированные ИС сервоконтроллера значительно сокращают время разработки приложений с выдающейся динамикой.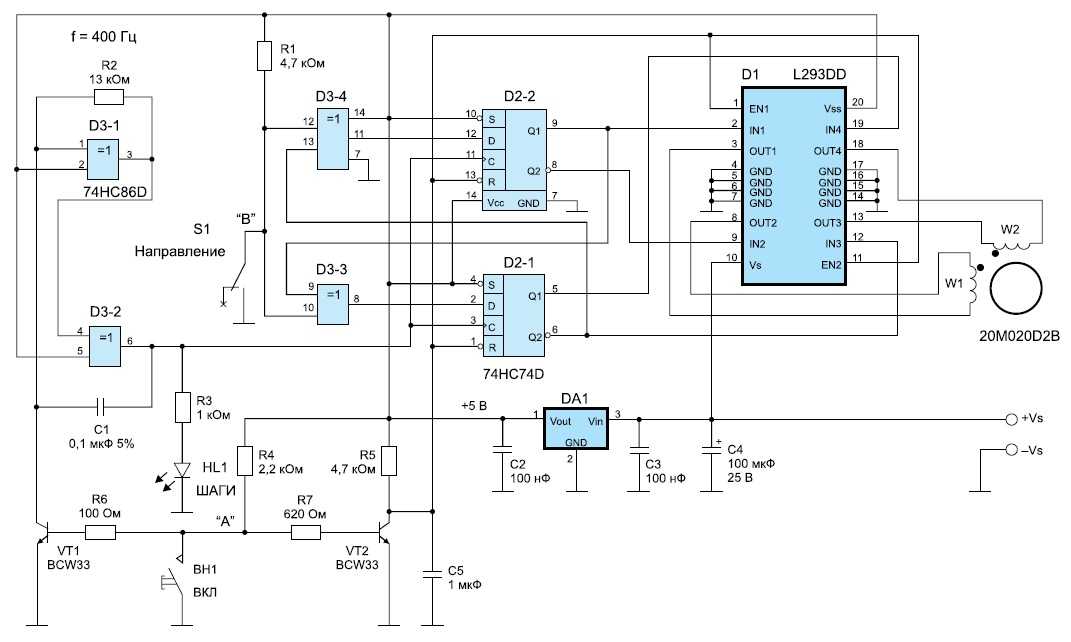 ИС предварительного драйвера BLDC от Trinamic, оснащенные системой обратной связи с высоким разрешением и ориентированным на поле управлением, являются лучшим решением для мощных приводов.
ИС предварительного драйвера BLDC от Trinamic, оснащенные системой обратной связи с высоким разрешением и ориентированным на поле управлением, являются лучшим решением для мощных приводов. Драйверы обеспечивают прямое мостовое управление для синусоидальной коммутации трехфазных двигателей с использованием 6-линейного управления от ЦП. Мощные МОП-транзисторы, зарядный насос и варианты обратной связи по току — все это упаковано в 3-фазный драйвер для двигателей BLDC и PMSM, что делает его высокоэффективным решением для мощных приводов.
Драйверы обеспечивают прямое мостовое управление для синусоидальной коммутации трехфазных двигателей с использованием 6-линейного управления от ЦП. Мощные МОП-транзисторы, зарядный насос и варианты обратной связи по току — все это упаковано в 3-фазный драйвер для двигателей BLDC и PMSM, что делает его высокоэффективным решением для мощных приводов.