Содержание
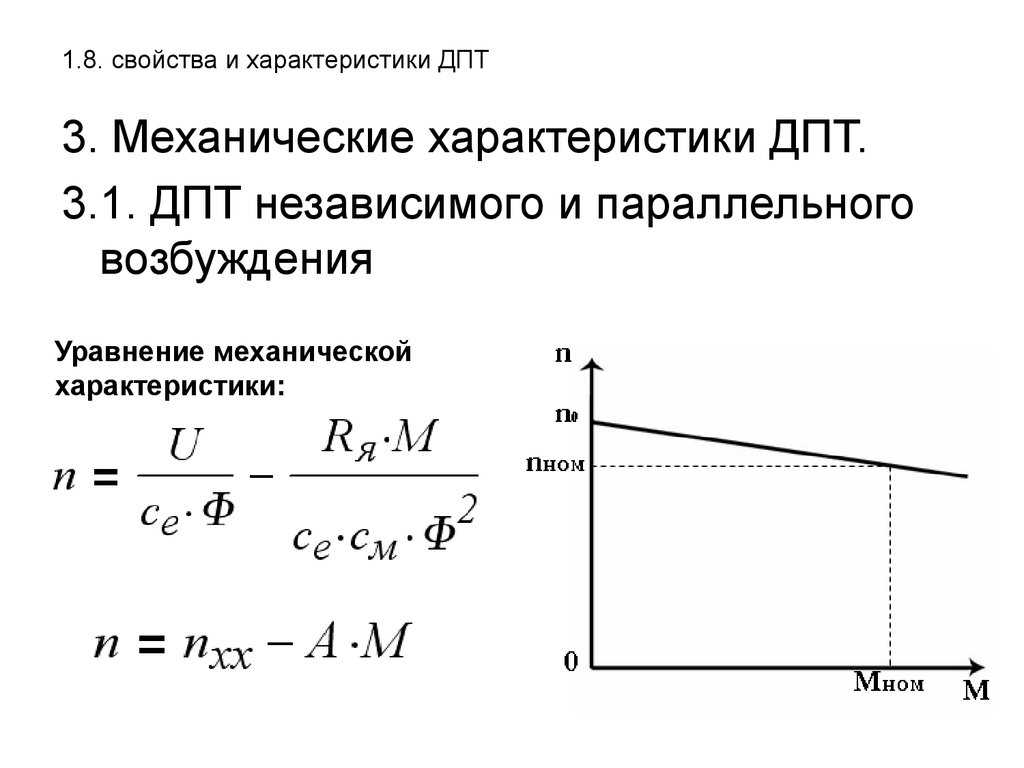
3.6. Механические характеристики синхронного двигателя
Синхронные
двигатели, если они работают при
постоянной частоте с неизменной угловой
скоростью, применяются для приводов,
не требующих регулирования скорости.
К таким приводам относятся: компрессоры,
холодильные машины, камнедробилки и т.
п. Основное достоинство синхронного
двигателя заключается в возможности
работать с высоким коэффициентом
мощности.
Угловая
скорость синхронного двигателя (рис.
3.26, б) при работе в установившемся режиме
с возрастанием нагрузки на валу до
определенного значения, не превышающего
максимального момента
,
остается строго постоянной и равна
синхронной угловой скорости.
.
Поэтому
механическая характеристика его имеет
вид прямой линии, параллельной оси
абсцисс. Если момент нагрузки превышает,
то двигатель может выпасть из синхронизма.
Современные
синхронные двигатели имеют в роторе
кроме нормальной рабочей обмотки,
питаемой постоянным током, еще и
специальную пусковую короткозамкнутую
обмотку. С помощью этой обмотки двигатель
С помощью этой обмотки двигатель
пускается в ход как асинхронный, и
поэтому в пусковых режимах он обладает
характеристикой асинхронного двигателя.
На рис. 3.22 представлены две пусковые
характеристики синхронного двигателя,
одна из них1
соответствует пуску с пониженным
начальным пусковым моментом
и значительным«входным» моментом,
под которым понимается момент, развиваемый
при скорости, равной 0,95
.
При этой скорости возможно вхождение
двигателя в синхронизм после включения
постоянного тока в обмотку возбуждения.
Если
пусковая клетка имеет увеличенное
активное сопротивление, то начальный
пусковой момент
будет больше, чем в предыдущем случае,
а входной момент
уменьшится (кривая2
на рис. 3.22). Выбор одной из двух указанных
пусковых характеристик зависит от
моментов сопротивления,
которым обладают производственные
механизмы.
Для
решения вопроса устойчивой работы
двигателя при пульсирующей нагрузке
необходимо знать зависимость момента
от угламежду напряжением и ЭДС двигателя (рис.
3.23.). Эта зависимостьносит название угловой характеристики
синхронного двигателя.
Уравнение
угловой характеристики имеет вид
,
где
— максимальный момент
,
—
ток короткого замыкания
С
увеличением нагрузки угол
возрастает, что вызывает увеличение
момента двигателя и обеспечивает
равенство,
т.е. условие нового устойчивого состояние
электропривода. Приусловие
устойчивой работы нарушается, так как
при увеличении нагрузки уголпродолжает возрастать, а момент,
развиваемый двигателем, уменьшается,
вследствие чего двигатель выпадает из
синхронизма.
Номинальному
моменту двигателя
практически
соответствует угол.
При этом перегрузочная способность
двигателя равна.
4.1.
Из приведенных уравнений выберите
уравнение для расчета механической
характеристики асинхронного двигателя,
учитывающего активное сопротивление
статора.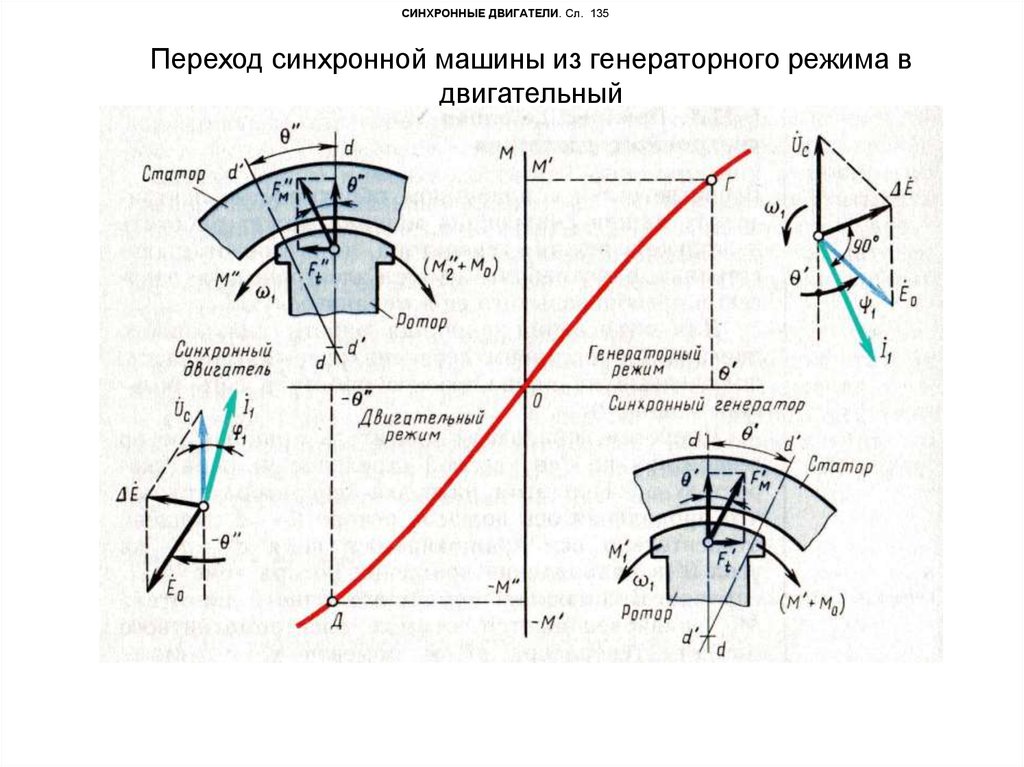
О | 1) | 2) |
3) | 4) |
Правильный ответ
____
4.2.
Из приведенных уравнений выберите
уравнение для расчета критического
скольжения асинхронного двигателя в
двигательном режиме.
О | 1) | 2) |
3) | 4) |
Правильный ответ
____
4. 3.
3.
Из приведенных уравнений выберите
уравнение для расчета критического
момента асинхронного двигателя в
двигательном режиме.
т | 1) | 2) |
3) | 4) |
Правильный ответ
____
4.4.
Из приведенных уравнений выберите
уравнение для расчета критического
момента асинхронного двигателя в
генераторном режиме.
О | 1) | 2) |
3) | 4) |
Правильный ответ
____
4. 5.
5.
Из приведенных уравнений выберите
уравнение для расчета критического
скольжения асинхронного двигателя в
двигательном режиме при введении в
роторную цепь дополнительного
сопротивления
О | 1) | 2) |
3) | 4) |
Правильный ответ
____
4.6. |
Правильный ответ
____
4. |
 7.
7. Правильный ответ
____
4.8. |
Правильный ответ
____
4.9. |
Правильный ответ
____
4. |
 10.
10. Правильный ответ
____
4.11. |
Правильный ответ
____
4.12. |
Правильный ответ
____
4. |
 13.
13. Правильный ответ
____
4.14.
Из приведенных уравнений выберите
уравнение для синхронной скорости и
максимального момента синхронного
двигателя.
О | 1) | 2) |
1) | 1) |
Правильный ответ
____
4.15.
Из приведенных уравнений выберите
уравнение для расчета угловой
характеристики неявнополюсного
синхронного двигателя.
О | 1) | 2) |
3) | 4) |
Правильный ответ
____
4. |
 16.
16. Правильный ответ
____
4.17. |
Правильный ответ
____
Лекция 5
Синхронный двигатель | Электротехника
Принцип действия синхронного двигателя.
Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя.
Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС и .
Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС и .
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС , которая направлена против напряжения сети . Сумма ЭДС с учётом падения напряжения на активном сопротивлении обмотки статора уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс.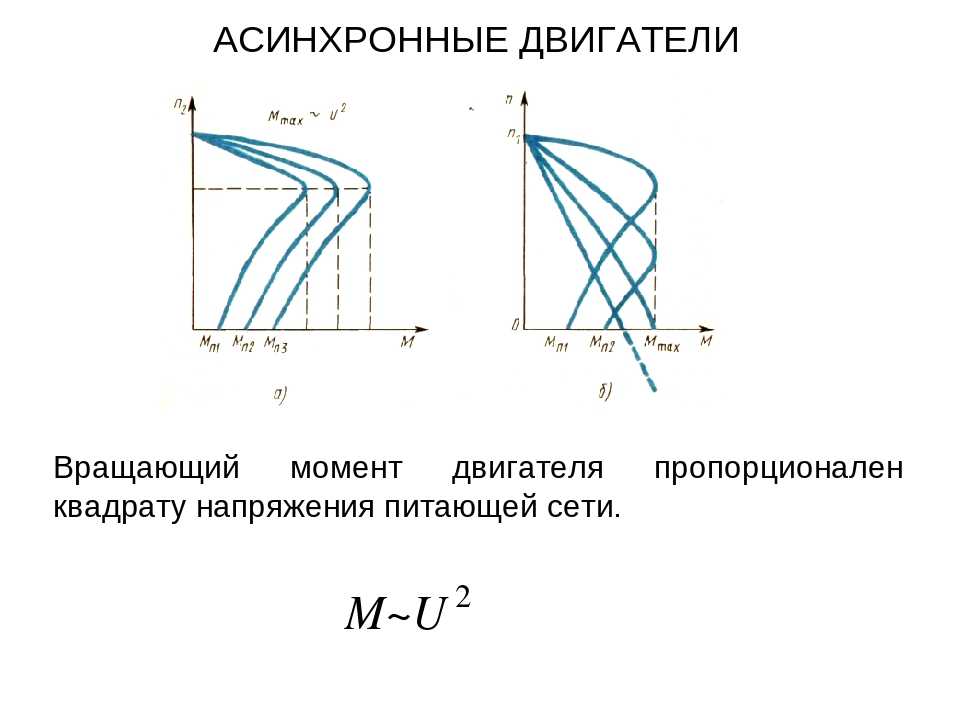 В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6).
В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6).
В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора.
В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
, (4.4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что
=0).
Векторная диаграмма синхронного двигателя.
Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя.
Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности.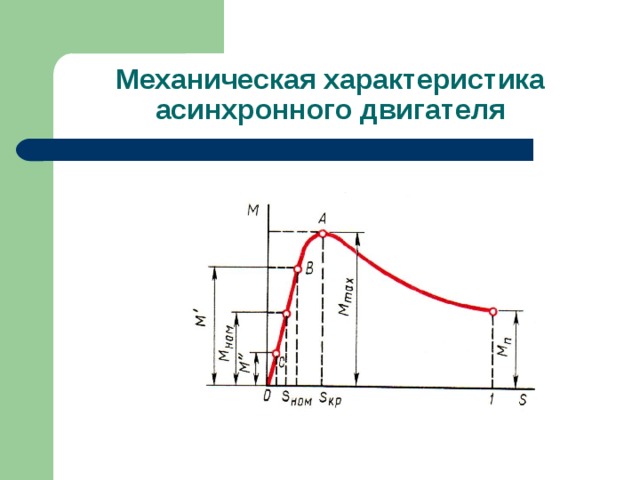
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор, где — угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок , где —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
.
Механический момент на валу двигателя
,
(4.5)
где — угловая скорость ротора; Мтах = — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
Угловая и механическая характеристики.
Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды.
В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние.
Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.
Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя.
Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), =, ток отстаёт по фазе от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =и ток является чисто активным.
Наоборот, при перевозбуждении и вектор тока опережает по фазе вектор напряжения ,, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при .
U – образные характеристики.
Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем , левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается (рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
Рис. 4.17 и 4.18
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.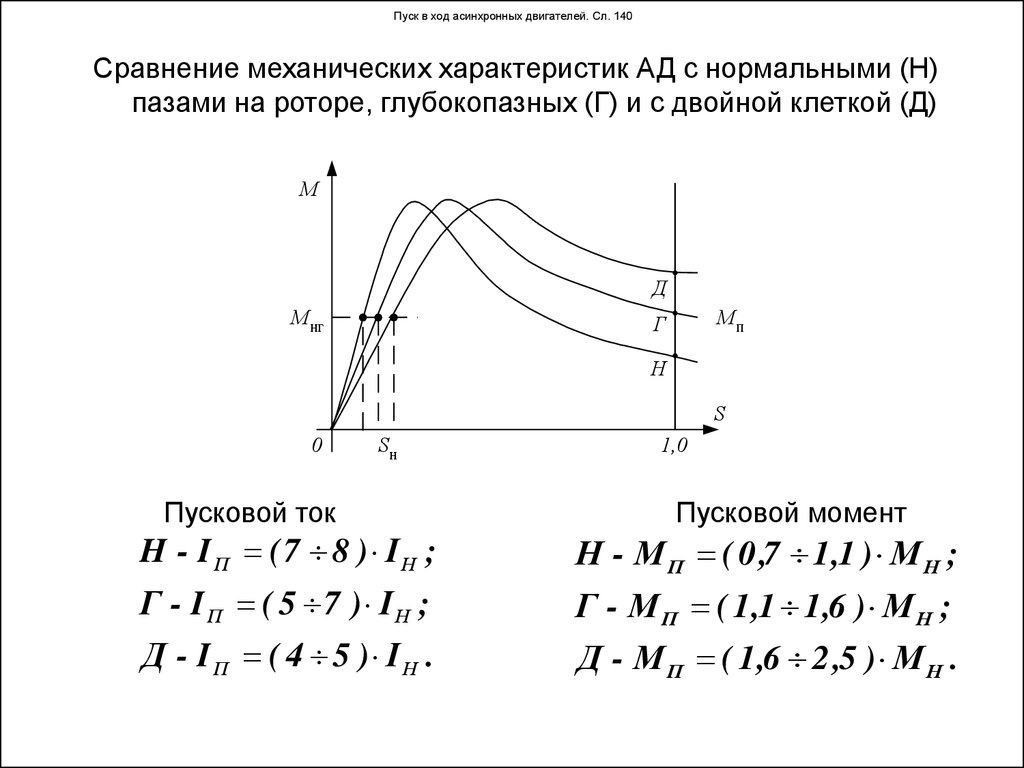
Синхронные компенсаторы.
Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя.
Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).
При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв.
Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный.
В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей.
Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.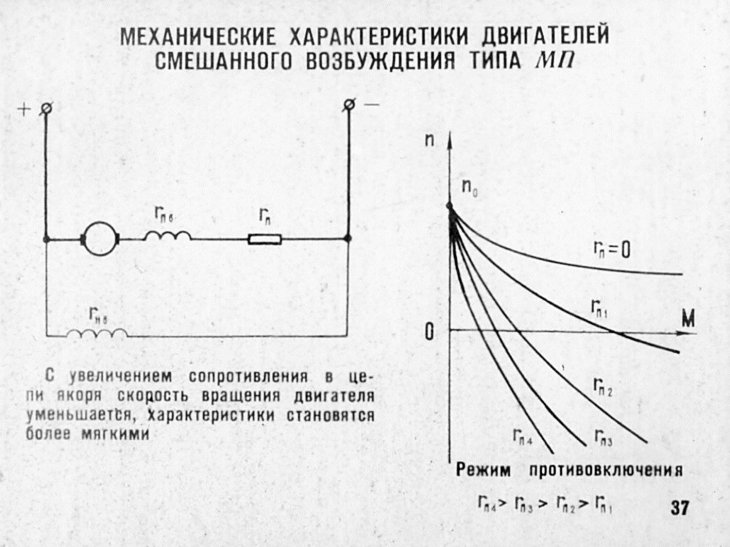 п.
п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Механические характеристики и свойства синхронных электродвигателей
Страница 5 из 54
Синхронным называют такой электродвигатель переменного тока, у которого угловая скорость (частота вращения) ротора одинакова с угловой скоростью (частотой вращения) вращающегося поля, т. е. ω=ω0 (п=n0).
е. ω=ω0 (п=n0).
При работе синхронного электродвигателя питание статорной обмотки производится переменным током, а роторной — постоянным. Роторная обмотка называется обмоткой возбуждения, а питающий ее постоянный ток — током возбуждения. Взаимодействие магнитных полей ротора и статора создает электромагнитный вращающий момент. Однако, поскольку переменный ток меняет свое направление с частотой 50 периодов в секунду (50 Гц), при включении двигателя ротор не может сразу начать вращение и вибрирует, так как испытывает непрерывные толчки в обе стороны. Для того чтобы можно было запустить синхронный двигатель в ход, его ротор, кроме обмотки возбуждения, снабжают дополнительной пусковой обмоткой (короткозамкнутой или фазной) —с такой обмоткой двигатель включается как обычный асинхронный электродвигатель от полного или пониженного напряжения сети. При достижении двигателем угловой скорости, близкой к синхронной (0,95—0,98ω0), в обмотку возбуждения подается постоянный ток (ток возбуждения), после чего угловая скорость вращения ротора становится одинаковой с угловой скоростью вращающегося поля, двигатель входит в синхронизм и начинает работать в синхронном режиме. При синхронной частоте вращения ротора наличие дополнительной пусковой обмотки не оказывает никакого действия, так как эта обмотка, вращаясь синхронно с магнитным полем, не пересекается магнитными линиями, токи в ней не индуктируются и вращающий момент не создается.
При синхронной частоте вращения ротора наличие дополнительной пусковой обмотки не оказывает никакого действия, так как эта обмотка, вращаясь синхронно с магнитным полем, не пересекается магнитными линиями, токи в ней не индуктируются и вращающий момент не создается.
Питание обмотки возбуждения осуществляется от возбудителя — генератора постоянного тока, смонтированного на самом двигателе, или отдельно стоящего возбудительного агрегата — генератора постоянного тока с приводом от асинхронного электродвигателя трехфазного тока. Кроме вращающихся возбудительных агрегатов заводы выпускают статические возбудители из полупроводниковых (тиристорных) выпрямителей. Возбудительные агрегаты для взрывозащищенных машин нефтяных насосных и газокомпрессорных станций должны быть также во взрывозащищенном исполнении или расположены в отдельном невзрывоопасном помещении.
Рис. 6. Схемы пуска и возбуждения синхронных электродвигателей
На рис. 6,а изображена схема питания обмотки возбуждения ОВ синхронного двигателя СД от вращающегося возбудителя В (генератора постоянного тока) с обмоткой возбуждения ОВВ и реостатом возбуждения РВ. При пуске синхронного двигателя вследствие большой частоты вращения электромагнитного поля относительно неподвижного ротора на концах обмотки возбуждения (на кольцах ротора) возникают большие напряжения, опасные для изоляции ротора. Для предотвращения этого обмотку возбуждения перед пуском замыкают на разрядное сопротивление СР, которое отключается контактором КВ1 одновременно с включением постоянного тока двухполюсным контактором КВ2. Для механизмов, не требующих при пуске больших моментов (например, центробежных насосов и вентиляторов), применяют схему без разрядного сопротивления, с глухим подключением возбудителя к обмотке возбуждения (рис. 6,б), а в качестве разрядного используют сопротивление обмотки возбуждения возбудителя ОВВ. На рис. 6,в изображена схема возбуждения от комплектного статического возбудителя с блоком управления БУ. Регулирование тока возбуждения осуществляется реостатом возбуждения РВ. Обмотка возбуждения ОВ получает питание постоянным током от селенового выпрямителя БС.
При пуске синхронного двигателя вследствие большой частоты вращения электромагнитного поля относительно неподвижного ротора на концах обмотки возбуждения (на кольцах ротора) возникают большие напряжения, опасные для изоляции ротора. Для предотвращения этого обмотку возбуждения перед пуском замыкают на разрядное сопротивление СР, которое отключается контактором КВ1 одновременно с включением постоянного тока двухполюсным контактором КВ2. Для механизмов, не требующих при пуске больших моментов (например, центробежных насосов и вентиляторов), применяют схему без разрядного сопротивления, с глухим подключением возбудителя к обмотке возбуждения (рис. 6,б), а в качестве разрядного используют сопротивление обмотки возбуждения возбудителя ОВВ. На рис. 6,в изображена схема возбуждения от комплектного статического возбудителя с блоком управления БУ. Регулирование тока возбуждения осуществляется реостатом возбуждения РВ. Обмотка возбуждения ОВ получает питание постоянным током от селенового выпрямителя БС.
Рис. 7. Механическая характеристика синхронного электродвигателя
Механическая характеристика синхронного электродвигателя обусловлена его основным свойством — постоянной угловой скоростью (частотой вращения) и представляется в виде прямой линии, параллельной оси моментов. Как видно из рис. 7, механическая характеристика обрывается при М=Мmаx. Это означает, что при колебаниях нагрузки, не превышающих Mmax, значение мгновенной угловой скорости колеблется около средней величины, весьма близкой к ω0. При значительном увеличении момента нагрузки (больше Mmax) двигатель выпадает из синхронизма и останавливается или переходит в асинхронный режим. Во избежание выпадения из синхронизма при случайных толчках нагрузки синхронные двигатели делают такими, что их максимальный момент в 2—2,5 раза больше номинального Mmax=(2:2,5)Мnom.
Пуск синхронного двигателя характеризуется тремя моментами: пусковым Мпуск, необходимым для трогания двигателя с места под нагрузкой; входным Мвх, при входе в синхронизм, т. е. при угловой скорости, близкой к синхронной (0,95-:-0,98ω0), и максимальным Ммах (критическим), при синхронной скорости и номинальных напряжении и токе возбуждения ротора. Минимальные моменты, необходимые для пуска механизмов насосных и компрессорных станций, приведены в табл. 5.
е. при угловой скорости, близкой к синхронной (0,95-:-0,98ω0), и максимальным Ммах (критическим), при синхронной скорости и номинальных напряжении и токе возбуждения ротора. Минимальные моменты, необходимые для пуска механизмов насосных и компрессорных станций, приведены в табл. 5.
Пуск синхронных электродвигателей может быть осуществлен как от полного, так и от пониженного напряжения, в зависимости от мощности питающей сети. Способы ограничения пускового тока, если прямой пуск недопустим, те же, что и для асинхронных двигателей (включение активных и реактивных сопротивлений и автотрансформаторов в цепь статора).
Минимальные моменты синхронных двигателей, необходимые для пуска механизмов
Статор синхронного электродвигателя, будучи присоединен к сети переменного тока, получает от нее необходимую для намагничивания реактивную мощность. Ротор намагничивается подаваемым в него током возбуждения (постоянным током). При малом токе возбуждения электродвигатель потребляет из сети реактивную мощность, при большом — отдает ее в сеть.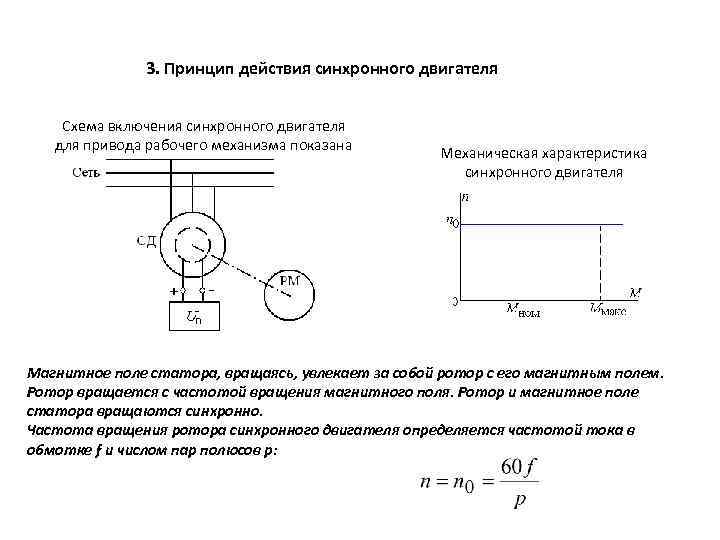 В первом случае говорят, что двигатель работает с отстающим коэффициентом мощности, во втором — с опережающим коэффициентом мощности.
В первом случае говорят, что двигатель работает с отстающим коэффициентом мощности, во втором — с опережающим коэффициентом мощности.
Рис. 8. Схемы электродвигателей постоянного тока с последовательным (а), параллельным (б) и смешанным (а) возбуждением
Свойство синхронных электродвигателей отдавать в сеть реактивную мощность используют для компенсации недостающей в сети реактивной мощности, т. е. для улучшения коэффициента мощности сети.
- Назад
- Вперёд
Характеристики крутящего момента и скорости синхронного двигателя
Характеристики синхронного двигателя представляют собой двигатели с постоянной скоростью. Скорость двигателя определяется количеством полюсов и частотой. По сравнению с асинхронным двигателем он очень чувствителен к внезапным изменениям нагрузки. Это вызывает колебание ротора и, в конечном итоге, приводит к проблемам со стабильностью. Он не имеет пускового момента и требует пускового оборудования, чтобы довести его до номинальной скорости. Когда он работает с номинальной скоростью, поле возбуждается. Демпферные обмотки на полевых полюсах помогают гасить колебания и обеспечивают пусковой момент. Двигатель может работать с различными коэффициентами мощности путем изменения возбуждения. Синхронные двигатели с перевозбуждением работают при опережающих коэффициентах мощности, а недовозбужденные — при отстающих. Они достаточно эффективны. Их эффективность и способность корректировать коэффициент мощности путем изменения возбуждения делают синхронные двигатели привлекательными для приложений большой мощности. Они предпочтительны в качестве приводов с постоянной скоростью в промышленности.
Когда он работает с номинальной скоростью, поле возбуждается. Демпферные обмотки на полевых полюсах помогают гасить колебания и обеспечивают пусковой момент. Двигатель может работать с различными коэффициентами мощности путем изменения возбуждения. Синхронные двигатели с перевозбуждением работают при опережающих коэффициентах мощности, а недовозбужденные — при отстающих. Они достаточно эффективны. Их эффективность и способность корректировать коэффициент мощности путем изменения возбуждения делают синхронные двигатели привлекательными для приложений большой мощности. Они предпочтительны в качестве приводов с постоянной скоростью в промышленности.
Векторная диаграмма характеристики синхронного двигателя показана на рис. 1.32. Теория этих двигателей была разработана на основе синхронного реактивного сопротивления, которое учитывает реактивное сопротивление рассеяния и реакцию якоря. Явнополюсная машина с неравномерным воздушным зазором описывается прямым и квадратурным реактивными сопротивлениями. Изменение тока якоря двигателя при изменении его возбуждения описывается V-образными кривыми при развитии двигателя заданной мощности.
Изменение тока якоря двигателя при изменении его возбуждения описывается V-образными кривыми при развитии двигателя заданной мощности.
Изменение возбуждения вызывает:
- изменение тока якоря
- изменение коэффициента мощности сети
- незначительное изменение угла нагрузки.
Однако существуют минимальное и максимальное возбуждения для данной развиваемой мощности.
Увеличение механической нагрузки при постоянном возбуждении приведет к торможению ротора. Угол, на который ротор имеет тенденцию отставать от положения без нагрузки, называется углом нагрузки. В процессе достижения конечного положения ротор совершает колебания, которые гасятся демпфирующими обмотками.
Развиваемая мощность Характеристики синхронного двигателя:
Векторная диаграмма синхронного двигателя с цилиндрическим ротором при отстающем коэффициенте мощности показана на рис. 1.32. Мощность, развиваемая двигателем, определяется выражением , где
1.32. Мощность, развиваемая двигателем, определяется выражением , где
δ — угол нагрузки
В — напряжение на клеммах
E t — развиваемое двигателем напряжение Развиваемая мощность зависит от возбуждения. Увеличение возбуждения приводит к увеличению P д . Следовательно, угол нагрузки уменьшается при заданной развиваемой мощности. Перегрузочная способность двигателя увеличивается с увеличением возбуждения, и машина становится более стабильной. Если сопротивлением якоря можно пренебречь, развиваемая мощность будет равна
. Для явнополюсного ротора использование одного синхронного реактивного сопротивления дает ненадежные результаты. Производительность двигателя определяется использованием двух реактивных сопротивлений, а именно реактивных сопротивлений прямой оси и квадратурной оси (X d , X q ), первое больше второго.
Векторная диаграмма явнополюсного синхронного двигателя с перевозбуждением показана на рис. 1.32(b). Пренебрегая сопротивлением якоря, развиваемая мощность определяется выражением
1.32(b). Пренебрегая сопротивлением якоря, развиваемая мощность определяется выражением
, а развиваемый крутящий момент
. По сравнению с машинами с круглым ротором очевидны следующие отличия:
- составляющая из-за заметности, которая зависит от разницы реактивных сопротивлений двух осей. Это называется силой сопротивления (крутящим моментом). Явнополюсный ротор развивает большую мощность для заданного угла нагрузки. Это означает, что мощность на градус угла нагрузки больше у ротора с явно выраженными полюсами, чем у круглого ротора, когда возбуждение одинаково в обоих случаях (в остальном два двигателя идентичны).
- Максимальный крутящий момент в явнополюсном роторе возникает при угле крутящего момента, который меньше, чем соответствующий угол двигателя с круглым ротором.
- Крутящий момент имеется в явнополюсном роторе даже при нулевом возбуждении.
Диаграмма угла мощности синхронного двигателя:
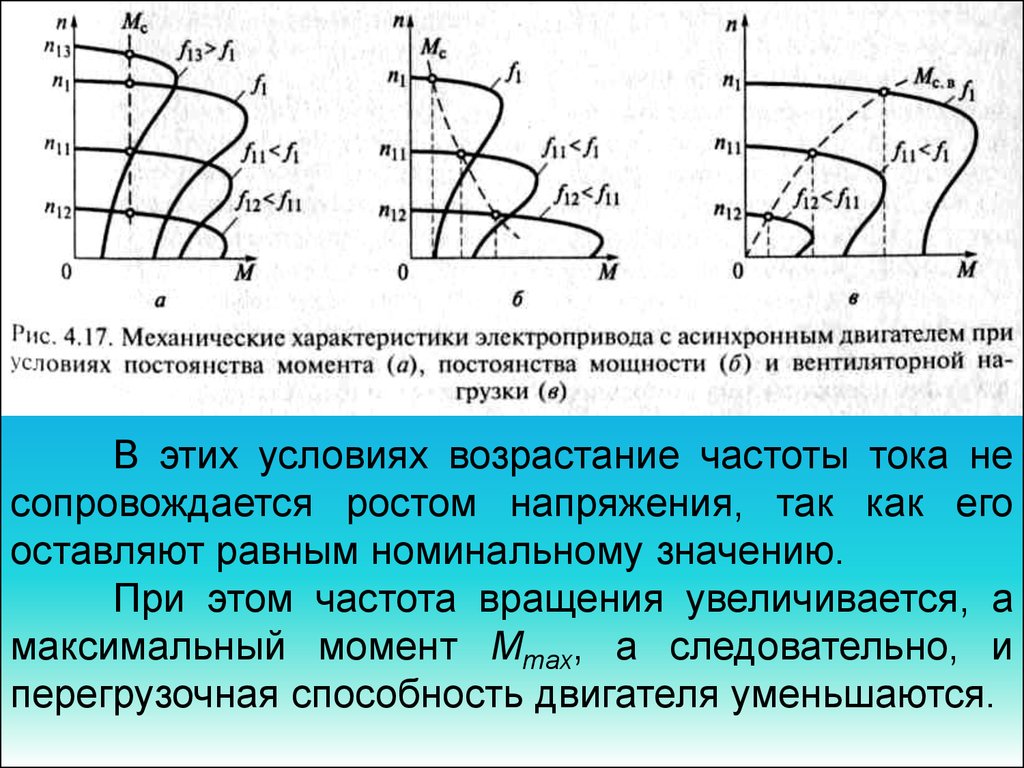
Характеристики угла мощности обоих типов ротора показаны на рис. 1.33 для различных возбуждений. Крутящий момент, развиваемый в синхронном двигателе, прямо пропорционален приложенному напряжению, в отличие от асинхронных двигателей, где он пропорционален квадрату напряжения. Следовательно, он менее чувствителен к перепадам напряжения.
1.33 для различных возбуждений. Крутящий момент, развиваемый в синхронном двигателе, прямо пропорционален приложенному напряжению, в отличие от асинхронных двигателей, где он пропорционален квадрату напряжения. Следовательно, он менее чувствителен к перепадам напряжения.
Характеристики крутящего момента синхронного двигателя показаны на рис. 1.34. Характеристика параллельна оси крутящего момента, так как двигатель имеет постоянную скорость.
Демпферные обмотки, предусмотренные на полюсных поверхностях для подавления вибраций, также могут использоваться для запуска двигателя по принципу асинхронного двигателя. Характеристики момента и скорости
синхронного двигателя во время пуска аналогичны характеристикам асинхронного двигателя и изображены на рис. 1.34 для различных сопротивлений демпфера. Для получения лучшего пускового момента демпферная обмотка должна иметь высокое сопротивление. Однако это подавляет их основную функцию демпфирования колебаний, поскольку для этой задачи более эффективен демпфер с низким сопротивлением. В зависимости от применения двигателя требуется разумный выбор сопротивления.
В зависимости от применения двигателя требуется разумный выбор сопротивления.
Желательные изменения кривой крутящего момента синхронного двигателя:
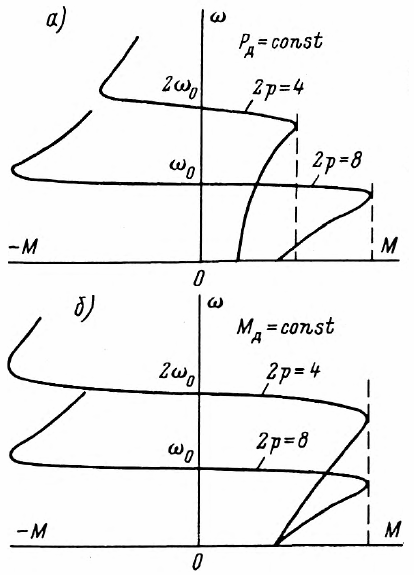
Скорость характеристики синхронного двигателя может быть изменена только путем изменения частоты, т. е. характеристика крутящего момента синхронного двигателя может быть изменена только с помощью изменение частоты питания. Чтобы избежать возможного насыщения, напряжение также изменяется в зависимости от частоты. Переменное напряжение и переменная частота используются для изменения кривой скорости-крутящего момента.
Тиристорные преобразователи питания обеспечивают питание двигателя. Можно выделить три режима работы:
- V ∕ f и E ∕ f постоянная
- В и E ∕ f постоянная
- В ∕ f и постоянная E
В первом режиме работы двигатель работает при постоянном потоке без учета влияния сопротивления. Ток, потребляемый двигателем, не зависит от частоты статора. Таким образом, возможны кривые скорость-момент, подобные кривым для параллельного двигателя. Рабочие характеристики показаны на рис. 1.35. Во втором режиме работы двигатель имеет характеристику последовательного двигателя, но присутствуют эффекты насыщения. Ток, потребляемый на низких частотах, высок. Рабочие характеристики показаны на рис. 1.36. Третий режим работы дает смешанную производительность, как показано на рис. 1.37.
Ток, потребляемый двигателем, не зависит от частоты статора. Таким образом, возможны кривые скорость-момент, подобные кривым для параллельного двигателя. Рабочие характеристики показаны на рис. 1.35. Во втором режиме работы двигатель имеет характеристику последовательного двигателя, но присутствуют эффекты насыщения. Ток, потребляемый на низких частотах, высок. Рабочие характеристики показаны на рис. 1.36. Третий режим работы дает смешанную производительность, как показано на рис. 1.37.
Управление скоростью синхронного двигателя:
С появлением тиристорных преобразователей мощности синхронные двигатели становятся все более популярными в качестве приводов с переменной скоростью. Возможны два типа управления синхронным двигателем при питании от тиристорных силовых преобразователей.
- Раздельное управление
- Самоконтроль
Используемый тип управления влияет как на динамические, так и на установившиеся характеристики двигателя.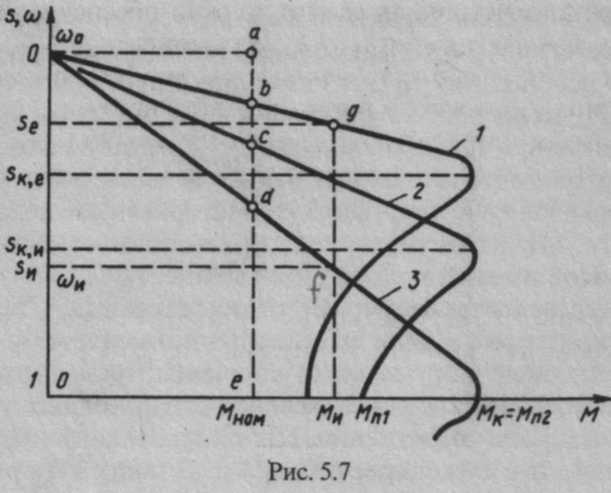 в первом случае (рис. 1.38) двигатель питается от источника переменной частоты, частота управляется извне от кварцевого генератора. Двигатель имеет нормальную работу синхронного двигателя со всеми его проблемами со стабильностью и рывками. В самоконтроле (рис. 1.39), частота входа определяется скоростью вращения ротора или напряжением статора. Датчик положения ротора используется для управления импульсами запуска инвертора. К тому времени, когда ротор перемещается на два шага полюсов, все тиристоры в инверторе срабатывают один раз в последовательности. Таким образом, входная частота и скорость вращения ротора связаны. Плюсы зажигания могут быть получены также путем измерения напряжения статора. Благодаря самоконтролю двигатель обладает хорошей стабильностью, а также хорошими динамическими характеристиками. Двигатель приобретает характеристики двигателя постоянного тока. Инвертор с датчиком положения ротора или датчиком наведенного напряжения эквивалентен шестисегментному коммутатору. Самоуправляемый синхронный двигатель может заменить двигатель постоянного тока, который имеет ограничения из-за механического коммутатора.
в первом случае (рис. 1.38) двигатель питается от источника переменной частоты, частота управляется извне от кварцевого генератора. Двигатель имеет нормальную работу синхронного двигателя со всеми его проблемами со стабильностью и рывками. В самоконтроле (рис. 1.39), частота входа определяется скоростью вращения ротора или напряжением статора. Датчик положения ротора используется для управления импульсами запуска инвертора. К тому времени, когда ротор перемещается на два шага полюсов, все тиристоры в инверторе срабатывают один раз в последовательности. Таким образом, входная частота и скорость вращения ротора связаны. Плюсы зажигания могут быть получены также путем измерения напряжения статора. Благодаря самоконтролю двигатель обладает хорошей стабильностью, а также хорошими динамическими характеристиками. Двигатель приобретает характеристики двигателя постоянного тока. Инвертор с датчиком положения ротора или датчиком наведенного напряжения эквивалентен шестисегментному коммутатору. Самоуправляемый синхронный двигатель может заменить двигатель постоянного тока, который имеет ограничения из-за механического коммутатора.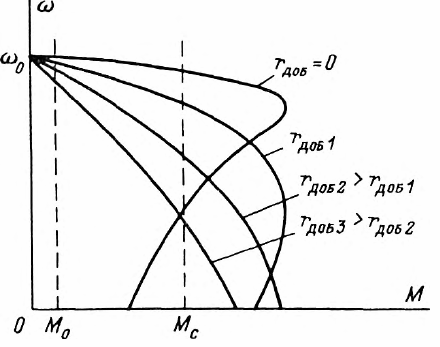 В этом режиме работы его также называют бесколлекторным двигателем (CLM). Двигатель может питаться от VSI или CSI или циклопреобразователя. При питании от CSI двигатель может перевозбуждаться, чтобы использовать напряжение машины для коммутации.
В этом режиме работы его также называют бесколлекторным двигателем (CLM). Двигатель может питаться от VSI или CSI или циклопреобразователя. При питании от CSI двигатель может перевозбуждаться, чтобы использовать напряжение машины для коммутации.
Форма кривой входного напряжения и тока для характеристики синхронного двигателя несинусоидальны. Временные гармоники формы волны приводят к пульсациям крутящего момента и нагреву якоря. Эти эффекты минимальны при использовании циклоконвертера. В случае питания CSI присутствуют всплески напряжения. Они влияют на изоляцию двигателя и номинальное напряжение инвертора.
Модель динамики упрощенного трехфазного синхронного
машина
Основное содержание
Моделирование динамики упрощенного трехфазного синхронного
машина
Библиотека
Simscape / Electrical / Specialized Power Systems / Electrical Machines
Описание
Блок Simplified Synchronous Machine моделирует электрические и
механические характеристики простой синхронной машины.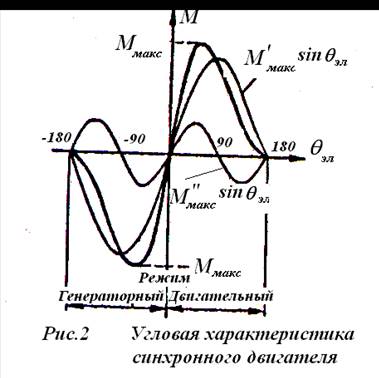
Электрическая система для каждой фазы состоит из источника напряжения
последовательно с импедансом RL, который реализует внутренний импеданс
машины. Значение R может быть равно нулю, но значение L должно
будь позитивным.
Блок Simplified Synchronous Machine реализует механическую систему
описывается формулой
Δω(t)=12H∫0t(Tm−Te) −KdΔω(t)dtω(t)=Δω(t)+ω0,
, где
Δ ω = изменение скорости
относительно скорости работы
H =
постоянная инерции
Tm = механическая
крутящий момент
Te = электромагнитный крутящий момент
Kd = коэффициент демпфирования, представляющий
влияние демпферных обмоток
ω ( т )
= механическая скорость ротора
ω 0 =
скорость работы (1 о.е.)
Хотя параметры можно вводить как в единицах СИ, так и
за единицу в диалоговом окне, внутренние расчеты выполняются в
за единицу. На следующей блок-схеме показано, как механическое
часть модели реализована. Модель вычисляет отклонение с
Модель вычисляет отклонение с
отношение к скорости работы; а не сама абсолютная скорость.
Коэффициент демпфирования Kd имитирует эффект демпфирующих обмоток
обычно используется в синхронных машинах. Когда машина подключена
к бесконечной сети (нулевой импеданс), изменение машины
дельта угла мощности (δ) в результате изменения механического
мощность ( P m ) можно приблизить
by the following second-order transfer function:
δPm=ωs/(2H)s2+2ζωns+ωn2,
where
δ | Power angle delta: angle of internal voltage Е с |
P м | Механическая мощность в о.е. |
ω N | Частота электромеханических колебаний = ωspmax/(2H) в RAD/S |
ζ | . |
ω S | Электрическая частота в RAD/S |
P MAX 9047 | |
H | Inertia constant(s) |
K d | Damping factor (pu_of_torque / pu_of_speed) |
 2 (KDIPIO
2 (KDIPIO Эта приблизительная передаточная функция, которая была получена
предполагая sin(δ) = δ, справедливо для малых степенных углов (δ
< 30 градусов). Из предыдущего выражения ζ следует
что значение Kd, необходимое для получения данного коэффициента демпфирования ζ:
Kd=4ζωsHPmax/2.
Параметры
В библиотеке Machines вы можете выбрать между единицами SI или единицами pu Упрощенный
Блоки Synchronous Machine для указания электрических и механических параметров
модель. Эти два блока имитируют точно такую же упрощенную модель синхронной машины;
Эти два блока имитируют точно такую же упрощенную модель синхронной машины;
единственная разница заключается в том, как вы вводите единицы измерения параметра.
Вкладка «Конфигурация»
- Тип соединения
Укажите количество проводов, используемых в трехфазном соединении Y:
трехпроводной (нейтраль недоступна) или четырехпроводной (нейтраль доступна).
По умолчанию3-жильный Y.- Механический ввод
Выберите механическую мощность, подаваемую на вал или ротор
скорость как вход Simulink ® блока или для представления машины
вал вращательным механическим портом Simscape™.Выберите
Механическая мощность Pm(по умолчанию)
указать потребляемую механическую мощность в Вт или в pu и изменить маркировку
блока ввода наPm. Скорость машины
определяется машиной Инерция J (или постоянная инерции H для
пу машины) и разницей между механическим моментом Тм ,
в результате приложенной механической мощности Pm ,
и внутренний электромагнитный момент Te .
соглашение о знаках механической мощности — когда скорость положительна,
положительный сигнал механической мощности указывает на режим генератора, а
отрицательный сигнал указывает на двигательный режим.Выберите
Скорость w, чтобы задать скорость
input, в рад/с или в pu, и измените маркировку входа блока наw.
Задается скорость машины и механическая часть модели
(постоянная инерции H) игнорируется. Использование скорости в качестве механического
input позволяет моделировать механическое соединение между двумя машинами.На следующем рисунке показано, как моделировать жесткое соединение валов.
в мотор-генераторной установке, когда момент трения в машине игнорируется
2. Выход скорости машины 1 (двигатель) связан со скоростью
вход машины 2 (генератора), а электромагнитный момент машины 2
выход Te подается на вход механического крутящего момента Tm
машина 1. Фактор кВт учитывает единицы скорости обеих машин
(pu или rad/s) и передаточное отношение коробки передач w2/w1. Коэффициент КТ учитывает
единицы крутящего момента обеих машин (pu или Нм) и номинальные характеристики машины. Также,
поскольку инерция J2 игнорируется в машине 2, J2 относится к машине
К инерции машины 1 J1 необходимо добавить 1 скорость.Выберите
Механический порт вращениядля
добавить в блок механический поворотный порт Simscape, который позволяет
соединение вала машины с другими блоками Simscape, имеющими
механические поворотные порты. Вход Simulink, представляющий
механическая мощность Pm или скоростьw
затем машина снимается с блока.На следующем рисунке показано, как подключить идеальный источник крутящего момента
блок из библиотеки Simscape на вал машины для представления
машина в режиме двигателя или в режиме генератора, когда скорость ротора
положительный.- Использовать имена сигналов для идентификации меток шин
имена сигналов для идентификации меток шины. Выберите этот параметр для
приложения, требующие, чтобы метки сигналов шины содержали только буквенно-цифровые символы.
персонажи. Значение по умолчанию очищено.Если этот флажок снят, для выходных данных измерений используется
определение сигнала для идентификации меток шины. Этикетки содержат
не буквенно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
 Коэффициент КТ учитывает
Коэффициент КТ учитывает
Вкладка «Параметры»
- Номинальная мощность, междуфазное напряжение,
и частота Номинальная полная мощность Pn (ВА), частота fn (Гц) и среднеквадратичное значение
междуфазное напряжение Vn (В). Вычисляет номинальный крутящий момент и преобразует
единицы СИ в pu. По умолчанию[187e6 13800 60].- Инерция, коэффициент демпфирования и пары
полюсов Инерция (J в кг.м 2 или H в секундах)
коэффициент демпфирования (Kd) и количество пар полюсов (p). Демпфирование
коэффициент должен быть указан в (pu крутящего момента)/(pu скорости) в обеих машинах
диалоговые окна (в пу и в СИ). По умолчанию[3,7 0 20]для
pu и[3.для СИ. 895e6 0 20] - Внутренний импеданс
Сопротивление R (Ом или о.е.) и реактивное сопротивление L (H или о.е.) для
каждую фазу. Значение по умолчанию:[0,02 0,3]для о.е. и[0,0204для СИ.
0,8104e-3]- Начальные условия
Начальное отклонение скорости (% от номинальной), угол ротора (градусы),
величины линейного тока (A или pu) и фазовые углы (градусы). Эти
значения автоматически вычисляются утилитой потока нагрузки
Блок питания. По умолчанию[ 0,0 0,0,0 0,0,0 ].- Шаг расчета (-1 для унаследованного)
Определяет шаг расчета, используемый блоком. Чтобы унаследовать
шаг расчета, указанный в блоке Powergui, установите этот параметр на-1.
По умолчанию−1.
 895e6 0 20]
895e6 0 20] Вкладка «Дополнительно»
Чтобы включить вкладку «Дополнительно», установите параметр Тип моделирования
блок powergui на Discrete и, на
Настройки вкладка, снимите флажок Автоматически обрабатывать дискретные
параметры решателя и решателя вкладки «Дополнительно» блоков .
- Модель дискретного решателя
Задает метод интегрирования, используемый блоком. Выбор
Трапециевидный неитеративный(по умолчанию),
Трапециевидная робастнаяиОбратный Эйлер.
надежныйПри выборе Автоматически обрабатывать дискретный решатель и Расширенный
вкладка солвер настройки блоков параметр в powergui
блок, модель дискретного решателя автоматически устанавливается наТрапециевидный.
надежныйТрапециевидный неитеративныйтребует добавления
незначительная шунтирующая нагрузка на клеммах машины для поддержания стабильности моделирования,
и симуляция может не сойтись и остановиться, когда количество машин увеличится.
в модели.Трапециевидная прочнаяиОбратный Эйлерпозволяют исключить необходимость использования паразитных нагрузок.
робастные К
устранить топологические ошибки машин, подключенных к индуктивной цепи
(например, автоматический выключатель, включенный последовательно с машиной), машина
моделирует незначительную внутреннюю нагрузку0,01% от номинальной мощности.Прочный трапециевидныйнемного точнее, чем
Обратный Эйлер робастный, особенно когда модель
моделируются на больших шагах выборки.Трапециевидный прочныймай
производить небольшие затухающие числовые колебания напряжения машины в условиях холостого хода,
в то время какОбратный Эйлер надежныйпредотвращает колебания и
сохраняет точность.Для получения дополнительной информации о том, какой метод использовать в вашем приложении, см. Моделирование дискретных электрических систем.
- Время выборки (-1 для унаследованного)
Определяет шаг расчета, используемый блоком.
Чтобы унаследовать указанный шаг расчета
в блоке powergui установите для этого параметра значение-1
(дефолт).
 К
К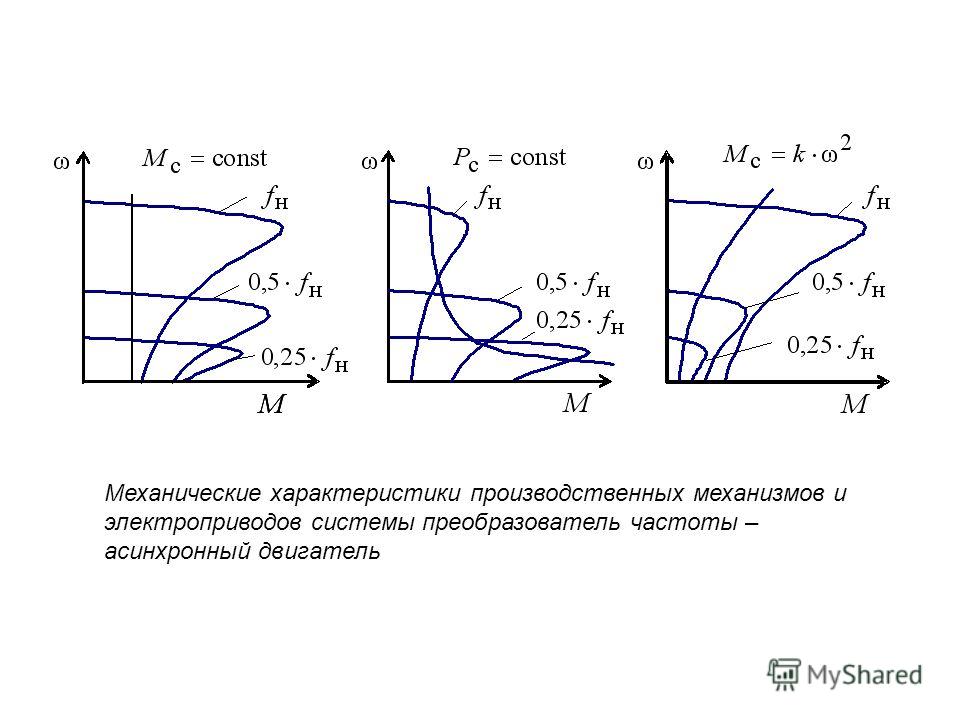 Чтобы унаследовать указанный шаг расчета
Чтобы унаследовать указанный шаг расчетаВкладка «Распределение нагрузки»
Параметры потока нагрузки определяют параметры блока для использования с инструментом «Поток нагрузки»
Блок питания. Эти параметры потока нагрузки предназначены для инициализации модели.
Только. Они не влияют на блочную модель или на производительность моделирования.
Конфигурация вкладки Load Flow
зависит от опции, выбранной для параметра Тип генератора .
- Тип генератора
Укажите тип генератора машины.
Выберите
качелидля реализации генератора
контроль величины и фазового угла напряжения на его клеммах.
Величина опорного напряжения и угол задаются Swing.
напряжение на шине или фотоэлектрической шине и Угол напряжения на шине качания параметры
блока Load Flow Bus, соединенного с машинными терминалами.Выберите
PV(по умолчанию) для реализации
генератор, контролирующий свою выходную активную мощность P и величину напряжения
V. P задается параметром Active power Generation P .
блока. V определяется шиной Swing или шиной PV.
напряжение параметр блока Load Flow Bus подключен
к терминалам машины. Вы можете контролировать минимум и максимум
реактивная мощность, вырабатываемая блоком с использованием Минимум
реактивная мощность Qmin и Максимальная реактивная мощность
Параметры Qmax .Выберите
PQдля реализации генератора
контролируя его выходную активную мощность P и реактивную мощность Q. P и
Q указаны Активная выработка мощности P и Реактивная
мощность генерации Q параметры блока соответственно.- Выработка активной мощности P
Укажите активную мощность, которую вы хотите вырабатывать машиной,
в ваттах. Когда машина работает в моторном режиме, вы указываете отрицательное
ценность. Этот параметр доступен, если вы укажете Генератор
тип какPVилиPQ.
По умолчанию0.- Выработка реактивной мощности Q
Укажите реактивную мощность, которую вы хотите вырабатывать машиной,
в варс. Отрицательное значение указывает на то, что реактивная мощность поглощается
машиной. Этот параметр доступен, только если вы укажете Генератор
введите какPQ. По умолчанию0.- Минимальная реактивная мощность Qmin
Этот параметр доступен, только если вы укажете Генератор
тип какPV. Указывает минимум
реактивная мощность, которая может быть выработана машиной при сохранении
напряжение на клеммах при его эталонном значении. Это опорное напряжение
определяется параметром Swing bus или PV bus voltage
блока Load Flow Bus, соединенного с машинными терминалами.
значение по умолчанию-inf, что означает наличие
отсутствие нижнего предела реактивной мощности. По умолчанию-инф.- Максимальная реактивная мощность Qmax
Этот параметр доступен, только если вы укажете Генератор
тип какPV. Указывает максимальное
реактивная мощность, которая может быть выработана машиной при сохранении
напряжение на клеммах при его эталонном значении. Это опорное напряжение
определяется параметром Swing bus или PV bus voltage
блока Load Flow Bus, соединенного с машинными терминалами.
значение по умолчанию+inf, значит есть
отсутствие верхнего предела реактивной мощности. По умолчанию+inf.

 Когда машина работает в моторном режиме, вы указываете отрицательное
Когда машина работает в моторном режиме, вы указываете отрицательное
Входы и выходы
-
Pm Механическая мощность, подаваемая на машину, в ваттах. Вход может быть константой
сигнал или он может быть подключен к выходу гидравлической турбины и
Губернаторский блок. Частота внутренних источников напряжения зависит от
механическая скорость машины.-
w Альтернативный ввод блока вместо
Pm(в зависимости
на значение параметра Механический вход )
— скорость машины, в рад/с.-
E Амплитуда внутренних напряжений блока. Может
быть постоянным сигналом или он может быть подключен к выходу напряжения
регулятор. Если вы используете машину с единицами СИ, этот ввод должен быть в
вольт между фазами RMS. Если вы используете машину единиц pu, она должна
быть в пу.-
m Выход Simulink блока представляет собой вектор, содержащий
измерительные сигналы. Вы можете демультиплексировать эти сигналы с помощью
Блок Bus Selector предоставляется в библиотеке Simulink. В зависимости
в зависимости от типа маски, которую вы используете, единицы измерения находятся в СИ или в о.е.Name
Definition
Units
ias
Stator current is_a
A or pu
ibs
Stator current is_b
A or pu
ics
Stator Текущий IS_C
A OR PU
VA
Терминальное напряжение VA
V или PU
99999928 9028 9028 9028 9028 9028 9028 9028 9028 9028 9028
V OR PU
9028
V OR PU
9999928
V OR PU
9999928
V OR PU
V OR PU
. 0229vb
Terminal voltage Vb
V or pu
vc
Terminal voltage Vc
V or pu
ea
Internal voltage Ea
V or pu
eb
Internal voltage Eb
V or pu
ec
Internal voltage Ec
V or pu
theta
Rotor angle theta
rad
w
Rotor speed wm
rad/s
Pe
Electrical power Pe
W
 Частота внутренних источников напряжения зависит от
Частота внутренних источников напряжения зависит от 0229
0229Предположения
Электрическая система блока Simplified Synchronous Machine состоит
исключительно источника напряжения за синхронным реактивным сопротивлением и сопротивлением. Все остальные само-
Все остальные само-
индуктивностями намагничивания якоря, возбуждения и демпфирующей обмоток пренебрегают.
влияние демпфирующих обмоток аппроксимируется коэффициентом демпфирования Kd. Три источника напряжения
и ответвления импеданса RL соединены Y-образно (три провода или четыре провода). Нагрузка может или может
не быть уравновешенным.
Ограничения
Когда вы используете блоки Simplified Synchronous Machine в дискретных системах, вы
возможно, придется использовать небольшую резистивную паразитную нагрузку, подключенную к клеммам машины, чтобы
избежать числовых колебаний. Большие времена расчета требуют больших нагрузок. Минимальное сопротивление
нагрузка пропорциональна времени расчета. Помните, что при временном шаге 25 мкс на частоте 60 Гц
системы, минимальная нагрузка составляет примерно 2,5% от номинальной мощности машины. Например,
Упрощенная синхронная машина мощностью 200 МВА в энергосистеме, дискретизированная с периодом дискретизации 50 мкс
требуется примерно 5% резистивной нагрузки или 10 МВт. Если время выборки уменьшить до 20 мкс,
Если время выборки уменьшить до 20 мкс,
резистивная нагрузка 4 МВт должна быть достаточной.
Примеры
power_simplealt
пример использует блок Simplified Synchronous Machine для представления 1000 МВА,
Эквивалентный источник 315 кВ, 60 Гц, подключенный к бесконечной шине (трехфазное программируемое напряжение).
Исходный блок). Блок Simplified Synchronous Machine (SI Units) используется как синхронный
генератор. Внутреннее сопротивление и реактивное сопротивление установлены соответственно на 0,02 о.е. (1,9845 Ом).
и 0,2 о.е. (X = 19,845 Ом; L = 0,0526 Гн). Инерция машины J = 168 870
кг.м 2 , что соответствует постоянной инерции H = 3 с.
электрическая частота равна ω с = 2*π*60 = 377 рад/с. У машины два
пар полюсов так, что его синхронная скорость равна 2*π*60/2 = 188,5 рад/с или 1800 об/мин.
Опция Load Flow
Powergui использовался для инициализации машины для запуска симуляции.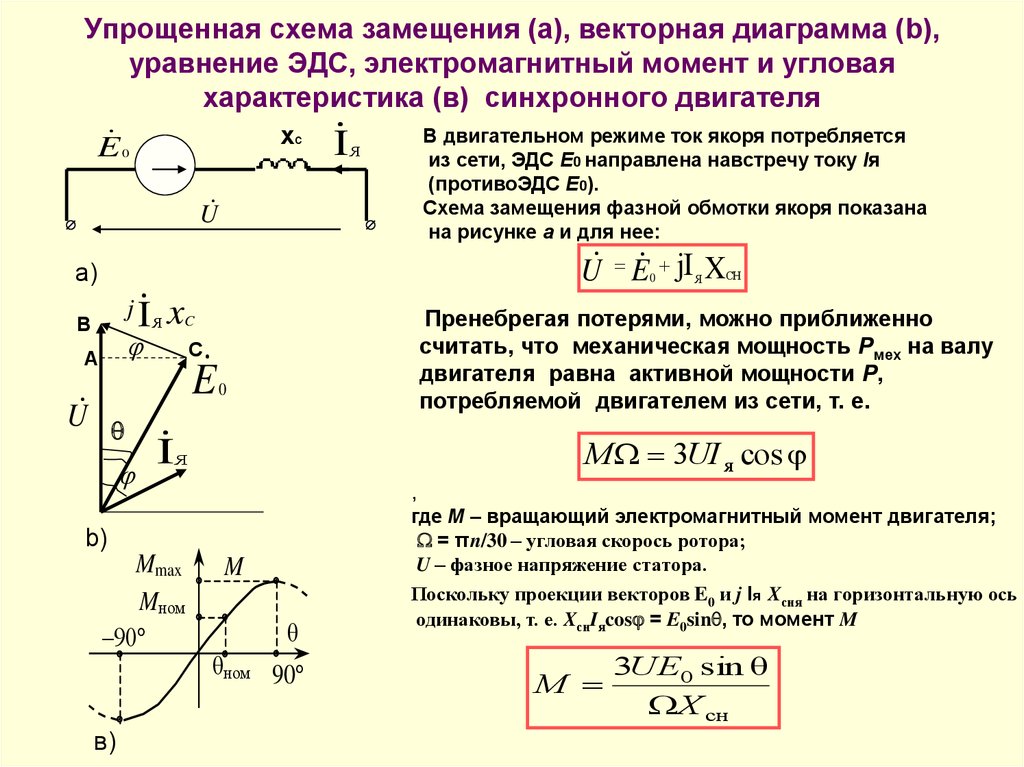
в установившемся режиме с машиной мощностью 500 МВт. Требуемый внутренний
напряжение, вычисленное потоком нагрузки, составляет 1,0149 о.е. Следовательно, внутренний
напряжение E = 315e3*1,0149= 319 690 В среднеквадратичное между фазами.
в блоке Constant, подключенном к входу E. Максимальная мощность
которое может выдать машина с напряжением на клеммах В t =
1,0 о.е. и внутреннее напряжение E = 1,0149 о.е. P max =
V t *E/X = 1,0149/0,2 = 5,0745 о.е.
Коэффициент демпфирования Kd регулируется для получения коэффициента демпфирования
ζ = 0,3. Требуемое значение Kd:
Kd=4ζωsHPmax/2=64,3
Два блока Фурье измеряют угол степени δ. Этот угол вычисляется как
разность между фазовым углом внутреннего напряжения фазы А и фазовым углом фазы А
напряжение на клеммах.
В этом примере выполняется шаг механической мощности
прикладываются к валу. Машина изначально работает в установившемся режиме
с механической мощностью 505 МВт (механическая мощность, необходимая для
выходная электрическая мощность 500 МВт с учетом резистивных потерь).
При t = 0,5 с механическая мощность резко возрастает до 1000 МВт.
Запустите пример и наблюдайте за электромеханическим переходным процессом
в блоке Scope, отображающем угол мощности δ в градусах,
скорость машины в об/мин и электрическая мощность в МВт.
При начальной электрической мощности Pe = 500 МВт (0,5 о.е.) нагрузка
угол δ составляет 5,65 градуса, что соответствует ожидаемому значению:
Pe=VtEsinδX=1,0⋅1,0149⋅sin(5,65∘)0,2=0,5 о.е.
По мере увеличения механической мощности от 0,5 до 1,0 о.е.
угол нагрузки увеличивается и проходит серию недозатухающих колебаний
(коэффициент демпфирования ζ = 0,3) перед стабилизацией до нового значения
11,3 градуса. Частота колебаний определяется выражением:
fn=12πωsPmax2H=2,84 Гц.
См. также
Система возбуждения, гидравлическая турбина и регулятор, powergui, паровая турбина и регулятор, синхронная машина SI
Фундаментальная синхронная машина
Фундаментальная синхронная машина
Стандарт
История версий
Представлен до R2006a
Вы щелкнули ссылку, соответствующую этой команде MATLAB:
Запустите команду, введя ее в командном окне MATLAB.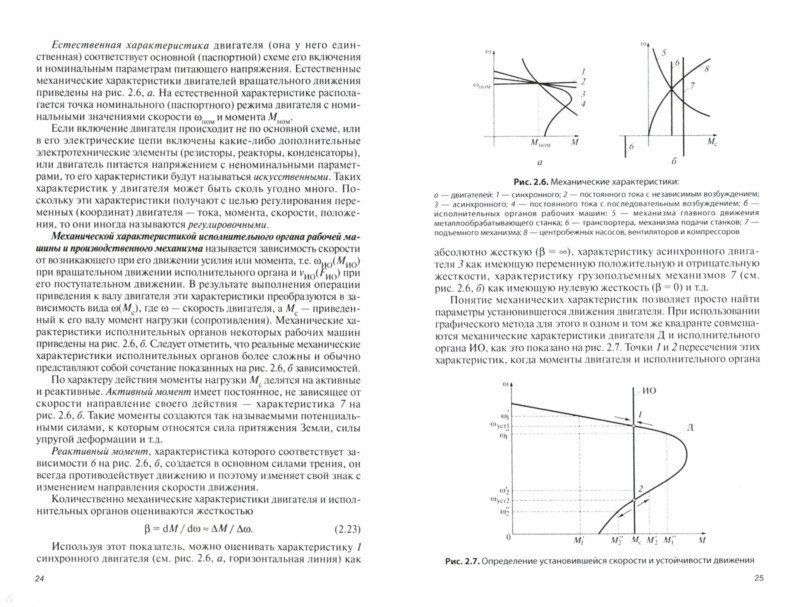
Веб-браузеры не поддерживают команды MATLAB.
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и ознакомиться с местными событиями и предложениями. В зависимости от вашего местоположения мы рекомендуем вам выбрать: .
Вы также можете выбрать веб-сайт из следующего списка:
Европа
Свяжитесь с местным офисом
Анализ конструкции и характеристик высокоскоростного синхронного двигателя с постоянными магнитами с учетом механической конструкции высокоскоростных и высоконапорных центробежных насосов
- DOI:10.1109/TMAG.2018.2845874
- Идентификатор корпуса: 53014954
@article{Jang2018DesignAC,
title={Конструкция и анализ характеристик высокоскоростного синхронного двигателя с постоянными магнитами с учетом механической конструкции высокоскоростных центробежных насосов с высоким напором},
author={Чан Ган-Хён, Ан Чжи-хун, Ким Бёнгок, Ли Дон-Хён, Бан Джэ Сон и Чхве Чан Ён},
journal={Транзакции IEEE на Magnetics},
год = {2018},
объем = {54},
страницы={1-6}
} - G. Jang, Ji-hun Ahn, Jang-young Choi
- Опубликовано 1 ноября 2018 г. ) для центробежного насоса мощностью 110 л.с. и 12 500 об/мин с учетом механических и электромагнитных характеристик. Мы выбрали размер ротора на основе метода крутящего момента на единицу объема ротора. Анализ напряжений ротора был выполнен с использованием аналитического метода и метода конечных элементов. На основании этих результатов была выбрана соответствующая толщина втулки и материал с учетом механических…
Просмотр на IEEE
doi.org
Критерии проектирования и эксперименты с учетом механических характеристик высокоскоростного синхронного генератора с постоянными магнитами класса 8 кВт и 40 об/мин
- Чон-Ин Ли, К. Шин, Г. Джанг, Т. Bang, Dong-Wan Ryu, Jang-young Choi
Engineering
AIP Advances
- 2019
Постоянный магнит и толщина втулки были выбраны путем анализа конструкции ротора и учета механических характеристик при номинальная скорость вращения для предотвращения повреждения магнита во время работы на высокой скорости.
Проектирование и анализ конструкции высокоскоростного синхронного генератора с постоянными магнитами и ротором с учетом электромеханических характеристик
В высокоскоростном синхронном генераторе с постоянными магнитами (PMSG) конструкция ротора должна не только обеспечивать механическую стабильность при высоких скоростях, но и обеспечивать требуемую электромагнитные (ЭМ) характеристики.…
Проектирование высокоскоростного PMSG с двумя различными материалами вала с учетом эффекта вылета и механических характеристик
- Чон-Ин Ли, Т. Банг, Х. Ли, Чон-Хён Ву, Дж. На, Чан-Ён Чой
Инженерное дело
Прикладные науки
- 2021
- 2021
 Jang, Ji-hun Ahn, Jang-young Choi
Jang, Ji-hun Ahn, Jang-young Choi
машины должны быть спроектированы так, чтобы удовлетворять электромагнитным и механическим характеристикам. В этом исследовании конструкция высокоскоростного синхронного генератора с постоянными магнитами с двумя…
Анализ напряжения ротора для высокоскоростных машин с постоянными магнитами с учетом зазора сборки и температурного градиента
Для предварительно спроектированных высокоскоростных машин с постоянными магнитами (HSPMM) точная оценка прочности ротора чрезвычайно важна для обеспечения надежности ротора на высоких скоростях. В этом документе…
В этом документе…
Проектирование и испытания втулки из углепластика для высокоскоростного синхронного двигателя с постоянными магнитами и ротором, установленным на поверхности
- Юн Чжоу, Л. Тянь, Шенхан Гао, Цзинлинь Чжан, Лингюн Ян, Руи-Гуан Се
Машиностроение
- 2021
В этом исследовании изучался высокоскоростной (HS) синхронный двигатель с постоянными магнитами (HSPMSM) с защитной втулкой из армированного углеродным волокном пластика (CFRP) в роторе, установленном на поверхности. Ввиду…
Исследование потерь на вихревые токи ротора и анализ факторов проектирования тепловых характеристик высокоскоростной синхронной машины с постоянными магнитами
- Юэ Чжан, С. МакЛун, Руи Дай
Инженерия, материаловедение
2019 IEEE Конференция и выставка по электрификации транспорта, Азиатско-Тихоокеанский регион (ITEC Asia-Pacific)
- 2019
В этой статье представлены анализ потерь на вихревые токи ротора и анализ тепловых характеристик высокоскоростной синхронной машины с постоянными магнитами мощностью 150 кВт, 17000 об/мин. Во-первых, представлена структура машины…
Во-первых, представлена структура машины…
Термический анализ высокоскоростного двигателя с постоянными магнитами и обмоткой Грамма для импульсного генератора переменного тока с использованием CFD
Благодаря очень коротким виткам обмотки Грамма широко используются в высокоскоростных двигателях с постоянными магнитами (HSPMM). В этом исследовании изучались тепловые проблемы двигателя мощностью 300 кВт, 12 000 об/мин…
Высокоскоростные машины с постоянными магнитами
- T. He, Z. Zhu, Jintao Chen
Engineering
- 2022
конструкции статора, конфигурации обмотки, конструкции ротора и паразитные эффекты. Во-первых, однофазные и…
Индивидуальные методы проектирования и оптимизации PMSM для насосов воды
Необходимость уменьшить размер водяных насосов для получения компактных конструкций, адаптированных к нескольким рабочим точкам, открывает новые области исследований. PMSM являются предпочтительным выбором из-за выдающегося диапазона крутящего момента и скорости…
Обзор гидравлического и конструктивного проектирования высокоскоростных центробежных насосов
В последние годы большое внимание уделяется применению высокоскоростных центробежных насосов; тем не менее, разработка этого насоса сталкивается с рядом проблем. Чтобы получить более полную информацию…
Чтобы получить более полную информацию…
ПОКАЗАНЫ 1-10 ИЗ 18 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантности Наиболее влиятельные документыНедавность
Метод проектирования сверхвысокоскоростной двигатель/генератор с постоянными магнитами для электротурбо-компаундной системы
В этом документе представлена конструкция сверхвысокоскоростного двигателя/генератора с постоянными магнитами (ПМ) с номинальной мощностью и скоростью 10 кВт и 70 000 об/мин соответственно для использования в электродвигателе с турбонаддувом…
Сверхвысокая Скоростной двигатель, поддерживаемый подшипниками с воздушной фольгой, для топливных элементов охлаждения воздуходувки
В рамках исследования синхронного двигателя с постоянными магнитами, приводимого в движение мощностью 15 кВт при номинальной скорости 120 000 об/мин, в этой статье представлен подход к минимизации потерь на вихревые токи, которые происходят заметно…
Электромагнитный и термический анализ высокоскоростных машин с постоянными магнитами разомкнутого цикла с воздушным охлаждением и кольцевыми обмотками Грамма
- Jianning Dong, Yunkai Huang, Hui Yang
Инженерия, физика
IEEE Transactions on Magnetics 209 2009 3 3
В этой статье исследуются электромагнитные и тепловые характеристики высокоскоростного двигателя с постоянными магнитами с воздушным охлаждением (HSPMM) разомкнутой цепи с кольцевой обмоткой Грамма. Возьмите HSPMM 36 кр/мин, 75 кВт…
Возьмите HSPMM 36 кр/мин, 75 кВт…
Электромагнитная конструкция высокоскоростного твердого цилиндрического мотор с постоянным магнетом, оснащенным активными магнитными подшипниками
- Shilei Xu, Xiquan Liu, Yun LE
, Материаловая наука
IEEE Transaction
В этой статье представлена конструкция в электромагнитном аспекте высокоскоростной цельноцилиндрической машины с постоянными магнитами (ПМ), оснащенной магнитными подшипниками. Во-первых, выбор конструкций машин БДМ…
Конструкция ротора высокоскоростных синхронных двигателей с постоянными магнитами с учетом материалов ротора, магнита и втулки
В этом документе описывается конструкция ротора высокоскоростных синхронных двигателей с постоянными магнитами (PM) с учетом материалов ротора, магнита и втулки. Влияние четырех различных материалов втулки на два…
Конструкция ударопрочного ротора высокоскоростного СДПМ для комплексной импульсной энергетической системы
- Юань Ван, С. Цуй, Шаопэн Ву, Ливэй Сонг, И. Миляев, Сергей О Юрьевича
Engineering
IEEE Transactions on Plasma Science
- 2017
В этом документе представлены аналитические модели напряжений для упрощенного ротора с переменной скоростью синхронного двигателя с постоянными магнитами поверхностного монтажа (СДПМ). Воздействие разряда генератора на…
Механическая конструкция роторов высокоскоростных электродвигателей с постоянными магнитами для турбонагнетателей
- S. Barrans, M. Al-Ani, J. Carter
Инженерия, физика
- 2017
Для реализации турбокомпрессоров с электрическим наддувом требуются электродвигатели, способные работать на очень высоких скоростях. В этих двигателях часто используется ротор с постоянными магнитами с магнитами, удерживаемыми внутри…
Высокоэффективная система двигателей с постоянными магнитами на 200 000 об/мин
мощность на валу 2000 Вт при 200 000 об/мин при 90% эффективность.
- Юань Ван, С.
 Цуй, Шаопэн Ву, Ливэй Сонг, И. Миляев, Сергей О Юрьевича
Цуй, Шаопэн Ву, Ливэй Сонг, И. Миляев, Сергей О Юрьевича