Содержание
Механическая и угловая характеристики синхронных электродвигателей
Механическая и угловая характеристики синхронных электродвигателей
Синхронные двигатели начинают широко внедрять в строительное производство, применяя их для привода машин средней и большой мощности, не требующих регулирования скорости: компрессоров, насосов, камнедробилок, экскаваторов.
Синхронный двигатель имеет неизменную скорость вращения, поэтому его механическая характеристика представляет прямую линию, параллельную оси абсцисс. В квадранте координатной системы она характеризует двигательный, а в квадранте — генераторный режим (рис. 35,а).
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Рис. 35. Механическая и угловая характеристики синхронного двигателя
а — механическая характеристика; б — угловая характеристика
Синхронный двигатель обладает абсолютно жесткой механической характеристикой. Однако его момент не может иметь беспредельно большого значения. При некотором предельном или максимальном значении нагрузочного момента синхронный двигатель выходит из устойчивой синхронной работы и останавливается.
Однако его момент не может иметь беспредельно большого значения. При некотором предельном или максимальном значении нагрузочного момента синхронный двигатель выходит из устойчивой синхронной работы и останавливается.
При увеличении нагрузки синхронного двигателя ротор его начинает отставать от поля статора, угол внутреннего сдвига фаз © при этом возрастает. Увеличению угла © соответствует рост момента синхронного двигателя. Однако при возрастании до значений, больших момент начинает уменьшаться и становится возможным выпадение из синхронизма и остановка двигателя.
Синхронный двигатель может работать и генератором с отдачей энергии в сеть при синхронной скорости, когда нагрузочный момент на его валу будет иметь отрицательное значение. Такой режим используется в сетевых двигателях преобразовательной группы системы Г—Д. Для целей торможения такой режим практического значения не имеет, поскольку при этом нельзя получить снижения скорости.
Торможение синхронных двигателей противовключе-нием практически не применяется из-за больших толчков тока и усложненной аппаратуры управления. Вместо этого обычно применяют динамическое торможение.
Вместо этого обычно применяют динамическое торможение.
При динамическом торможении синхронного двигателя к кольцам ротора подводится постоянный ток, а обмотка статора замыкается на сопротивление. Механические характеристики синхронного двигателя в этом режиме будут подобны характеристикам асинхронного двигателя при динамическом торможении.
Современные синхронные двигатели имеют в роторе кроме нормальной рабочей обмотки, питаемой постоянным током, еще и специальную пусковую короткозам-кнутую обмотку. С помощью этой обмотки двигатель пускается в ход как асинхронный, поэтому в пусковых режимах он обладает асинхронной характеристикой.
Хотя синхронный двигатель является несколько более сложной машиной, чем асинхронный двигатель с ко-роткозамкнутым ротором (из-за наличия у первого возбудителя, колец и щеточного устройства), тем не менее он применяется очень широко, заменяя асинхронный электродвигатель. Объясняется- это главным образом тем, что синхронный двигатель может работать с опережающим cos ф, отдавая в сеть реактивную мощность, необходимую для возбуждения асинхронных машин и трансформаторов. Тем самым повышается cos ф всего предприятия в целом и уменьшается мощность компенсирующих устройств. При значительной мощности синхронных двигателей в данной электроустановке от компенсирующих устройств можно полностью отказаться. Коэффициент полезного действия синхронных двигателей и надежность их выше, чем асинхронных, вследствие увеличенного зазора между статором и ротором и меньшей чувствительности к изменениям напряжения сети. Последнее обстоятельство вызывается тем, что момент асинхронного двигателя пропорционален квадрату напряжения сети, а момент синхронного — первой степени напряжения.
Тем самым повышается cos ф всего предприятия в целом и уменьшается мощность компенсирующих устройств. При значительной мощности синхронных двигателей в данной электроустановке от компенсирующих устройств можно полностью отказаться. Коэффициент полезного действия синхронных двигателей и надежность их выше, чем асинхронных, вследствие увеличенного зазора между статором и ротором и меньшей чувствительности к изменениям напряжения сети. Последнее обстоятельство вызывается тем, что момент асинхронного двигателя пропорционален квадрату напряжения сети, а момент синхронного — первой степени напряжения.
Для уменьшения величины пусковых токов и связанного с ними снижения напряжения, особенно в сетях небольшой мощности, пуск синхронных двигателей осуществляется обычно через реактор, а в некоторых случаях— через автотрансформатор. Ограничение пусковых токов защищает обмотки двигателей от повышенных динамических нагрузок, возникающих при прямом включении в сеть.
Читать далее: Синхронное вращение двух асинхронных электродвигателей в системе электропривода
Синхронный двигатель | Электротехника
Принцип действия синхронного двигателя.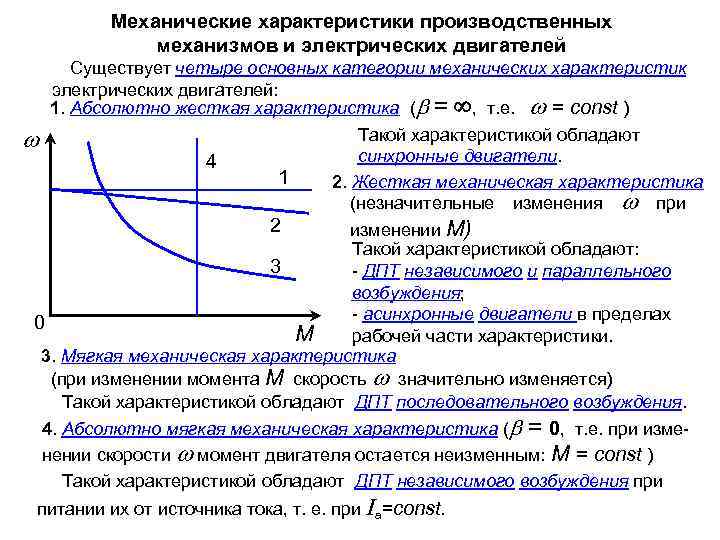
Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя.
Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС и .
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС , которая направлена против напряжения сети . Сумма ЭДС с учётом падения напряжения на активном сопротивлении обмотки статора уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6).
В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора.
В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
, (4. 4)
4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что
=0).
Векторная диаграмма синхронного двигателя.
Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя.
Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор, где — угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок , где —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
.
Механический момент на валу двигателя
,
(4.5)
где — угловая скорость ротора; Мтах = — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
Угловая и механическая характеристики.
Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды.
В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние.
Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики.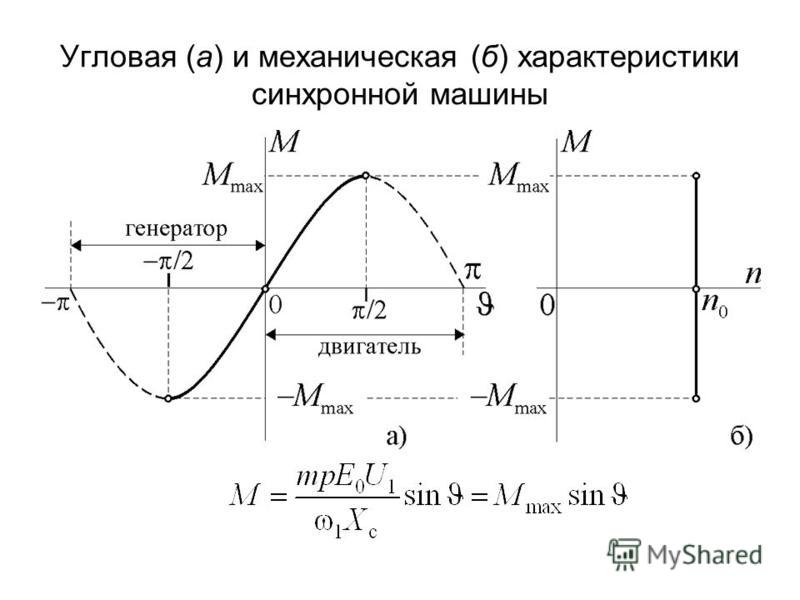 Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.
Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.
Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя.
Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), =, ток отстаёт по фазе от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =и ток является чисто активным.
Наоборот, при перевозбуждении и вектор тока опережает по фазе вектор напряжения ,, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при .
U – образные характеристики.
Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем , левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается (рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
Рис. 4.17 и 4.18
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы.
Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя.
Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).
При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв.
Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный.
В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей.
Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т. п.
п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Характеристики крутящего момента и скорости синхронного двигателя
Характеристики синхронного двигателя представляют собой двигатели с постоянной скоростью. Скорость двигателя определяется количеством полюсов и частотой. По сравнению с асинхронным двигателем он очень чувствителен к внезапным изменениям нагрузки. Это вызывает колебание ротора и, в конечном итоге, приводит к проблемам со стабильностью. Он не имеет пускового момента и требует пускового оборудования, чтобы довести его до номинальной скорости. Когда он работает с номинальной скоростью, поле возбуждается. Демпферные обмотки на полевых полюсах помогают гасить колебания и обеспечивают пусковой момент. Двигатель может работать с различными коэффициентами мощности путем изменения возбуждения. Синхронные двигатели с перевозбуждением работают при опережающих коэффициентах мощности, а недовозбужденные — при отстающих. Они достаточно эффективны. Их эффективность и способность корректировать коэффициент мощности путем изменения возбуждения делают синхронные двигатели привлекательными для приложений большой мощности. Они предпочтительны в качестве приводов с постоянной скоростью в промышленности.
Скорость двигателя определяется количеством полюсов и частотой. По сравнению с асинхронным двигателем он очень чувствителен к внезапным изменениям нагрузки. Это вызывает колебание ротора и, в конечном итоге, приводит к проблемам со стабильностью. Он не имеет пускового момента и требует пускового оборудования, чтобы довести его до номинальной скорости. Когда он работает с номинальной скоростью, поле возбуждается. Демпферные обмотки на полевых полюсах помогают гасить колебания и обеспечивают пусковой момент. Двигатель может работать с различными коэффициентами мощности путем изменения возбуждения. Синхронные двигатели с перевозбуждением работают при опережающих коэффициентах мощности, а недовозбужденные — при отстающих. Они достаточно эффективны. Их эффективность и способность корректировать коэффициент мощности путем изменения возбуждения делают синхронные двигатели привлекательными для приложений большой мощности. Они предпочтительны в качестве приводов с постоянной скоростью в промышленности.
Векторная диаграмма характеристики синхронного двигателя показана на рис. 1.32. Теория этих двигателей была разработана на основе синхронного реактивного сопротивления, которое учитывает реактивное сопротивление рассеяния и реакцию якоря. Явнополюсная машина с неравномерным воздушным зазором описывается прямым и квадратурным реактивными сопротивлениями. Изменение тока якоря двигателя при изменении его возбуждения описывается V-образными кривыми при развитии двигателя заданной мощности.
Изменение возбуждения вызывает:
- изменение тока якоря
- изменение коэффициента мощности сети
- незначительное изменение угла нагрузки.
Однако существуют минимальное и максимальное возбуждения для данной развиваемой мощности.
Увеличение механической нагрузки при постоянном возбуждении приведет к торможению ротора. Угол, на который ротор имеет тенденцию отставать от положения без нагрузки, называется углом нагрузки. В процессе достижения конечного положения ротор совершает колебания, которые гасятся демпфирующими обмотками.
В процессе достижения конечного положения ротор совершает колебания, которые гасятся демпфирующими обмотками.
Развиваемая мощность Характеристики синхронного двигателя:
Векторная диаграмма синхронного двигателя с цилиндрическим ротором при отстающем коэффициенте мощности показана на рис. 1.32. Мощность, развиваемая двигателем, определяется выражением , где
δ — угол нагрузки
В — напряжение на клеммах
E t — развиваемое двигателем напряжение Развиваемая мощность зависит от возбуждения. Увеличение возбуждения приводит к увеличению P д . Следовательно, угол нагрузки уменьшается при заданной развиваемой мощности. Перегрузочная способность двигателя увеличивается с увеличением возбуждения, и машина становится более стабильной. Если сопротивлением якоря можно пренебречь, развиваемая мощность будет равна
. Для явнополюсного ротора использование одного синхронного реактивного сопротивления дает ненадежные результаты. Производительность двигателя определяется использованием двух реактивных сопротивлений, а именно реактивных сопротивлений прямой оси и квадратурной оси (X d , X q ), первое больше второго.
Производительность двигателя определяется использованием двух реактивных сопротивлений, а именно реактивных сопротивлений прямой оси и квадратурной оси (X d , X q ), первое больше второго.
Векторная диаграмма явнополюсного синхронного двигателя с перевозбуждением показана на рис. 1.32(b). Пренебрегая сопротивлением якоря, развиваемая мощность определяется выражением
, а развиваемый крутящий момент
. По сравнению с машинами с круглым ротором очевидны следующие отличия:
- составляющая из-за заметности, которая зависит от разницы реактивных сопротивлений двух осей. Это называется силой сопротивления (крутящим моментом). Явнополюсный ротор развивает большую мощность для заданного угла нагрузки. Это означает, что мощность на градус угла нагрузки больше у ротора с явно выраженными полюсами, чем у круглого ротора, когда возбуждение одинаково в обоих случаях (в остальном два двигателя идентичны).
- Максимальный крутящий момент в явнополюсном роторе возникает при угле крутящего момента, который меньше, чем соответствующий угол двигателя с круглым ротором.

- Крутящий момент имеется в явнополюсном роторе даже при нулевом возбуждении.

Диаграмма угла мощности синхронного двигателя:
Характеристики угла мощности обоих типов ротора показаны на рис. 1.33 для различных возбуждений. Крутящий момент, развиваемый в синхронном двигателе, прямо пропорционален приложенному напряжению, в отличие от асинхронных двигателей, где он пропорционален квадрату напряжения. Следовательно, он менее чувствителен к перепадам напряжения.
Характеристики крутящего момента синхронного двигателя показаны на рис. 1.34. Характеристика параллельна оси крутящего момента, так как двигатель имеет постоянную скорость.
Демпферные обмотки, предусмотренные на полюсных поверхностях для подавления вибраций, также могут использоваться для запуска двигателя по принципу асинхронного двигателя. Характеристики момента и скорости
синхронного двигателя во время пуска аналогичны характеристикам асинхронного двигателя и изображены на рис. 1.34 для различных сопротивлений демпфера. Для получения лучшего пускового момента демпферная обмотка должна иметь высокое сопротивление. Однако это подавляет их основную функцию демпфирования колебаний, поскольку для этой задачи более эффективен демпфер с низким сопротивлением. В зависимости от применения двигателя требуется разумный выбор сопротивления.
1.34 для различных сопротивлений демпфера. Для получения лучшего пускового момента демпферная обмотка должна иметь высокое сопротивление. Однако это подавляет их основную функцию демпфирования колебаний, поскольку для этой задачи более эффективен демпфер с низким сопротивлением. В зависимости от применения двигателя требуется разумный выбор сопротивления.
Желательные изменения кривой крутящего момента синхронного двигателя:
Скорость характеристики синхронного двигателя может быть изменена только путем изменения частоты, т. е. характеристика крутящего момента синхронного двигателя может быть изменена только с помощью изменение частоты питания. Чтобы избежать возможного насыщения, напряжение также изменяется в зависимости от частоты. Переменное напряжение и переменная частота используются для изменения кривой скорости-крутящего момента.
Тиристорные преобразователи питания обеспечивают питание двигателя. Можно выделить три режима работы:
- V ∕ f и E ∕ f постоянная
- В и E ∕ f постоянная
- В ∕ f и постоянная E
В первом режиме работы двигатель работает при постоянном потоке без учета влияния сопротивления. Ток, потребляемый двигателем, не зависит от частоты статора. Таким образом, возможны кривые скорость-момент, подобные кривым для параллельного двигателя. Рабочие характеристики показаны на рис. 1.35. Во втором режиме работы двигатель имеет характеристику последовательного двигателя, но присутствуют эффекты насыщения. Ток, потребляемый на низких частотах, высок. Рабочие характеристики показаны на рис. 1.36. Третий режим работы дает смешанную производительность, как показано на рис. 1.37.
Ток, потребляемый двигателем, не зависит от частоты статора. Таким образом, возможны кривые скорость-момент, подобные кривым для параллельного двигателя. Рабочие характеристики показаны на рис. 1.35. Во втором режиме работы двигатель имеет характеристику последовательного двигателя, но присутствуют эффекты насыщения. Ток, потребляемый на низких частотах, высок. Рабочие характеристики показаны на рис. 1.36. Третий режим работы дает смешанную производительность, как показано на рис. 1.37.
Управление скоростью синхронного двигателя:
С появлением тиристорных преобразователей мощности синхронные двигатели становятся все более популярными в качестве приводов с регулируемой скоростью. Возможны два типа управления синхронным двигателем при питании от тиристорных силовых преобразователей.
- Раздельное управление
- Самоконтроль
Используемый тип управления влияет как на динамические, так и на установившиеся характеристики двигателя. в первом случае (рис. 1.38) двигатель питается от источника переменной частоты, частота управляется извне от кварцевого генератора. Двигатель имеет нормальную работу синхронного двигателя со всеми его проблемами со стабильностью и рывками. В самоконтроле (рис. 1.39), частота входа определяется скоростью вращения ротора или напряжением статора. Датчик положения ротора используется для управления импульсами запуска инвертора. К тому времени, когда ротор перемещается на два шага полюсов, все тиристоры в инверторе срабатывают один раз в последовательности. Таким образом, входная частота и скорость вращения ротора связаны. Плюсы зажигания могут быть получены также путем измерения напряжения статора. Благодаря самоконтролю двигатель обладает хорошей стабильностью, а также хорошими динамическими характеристиками. Двигатель приобретает характеристики двигателя постоянного тока. Инвертор с датчиком положения ротора или датчиком наведенного напряжения эквивалентен шестисегментному коммутатору. Самоуправляемый синхронный двигатель может заменить двигатель постоянного тока, который имеет ограничения из-за механического коммутатора.
в первом случае (рис. 1.38) двигатель питается от источника переменной частоты, частота управляется извне от кварцевого генератора. Двигатель имеет нормальную работу синхронного двигателя со всеми его проблемами со стабильностью и рывками. В самоконтроле (рис. 1.39), частота входа определяется скоростью вращения ротора или напряжением статора. Датчик положения ротора используется для управления импульсами запуска инвертора. К тому времени, когда ротор перемещается на два шага полюсов, все тиристоры в инверторе срабатывают один раз в последовательности. Таким образом, входная частота и скорость вращения ротора связаны. Плюсы зажигания могут быть получены также путем измерения напряжения статора. Благодаря самоконтролю двигатель обладает хорошей стабильностью, а также хорошими динамическими характеристиками. Двигатель приобретает характеристики двигателя постоянного тока. Инвертор с датчиком положения ротора или датчиком наведенного напряжения эквивалентен шестисегментному коммутатору. Самоуправляемый синхронный двигатель может заменить двигатель постоянного тока, который имеет ограничения из-за механического коммутатора. В этом режиме работы его также называют бесколлекторным двигателем (CLM). Двигатель может питаться от VSI или CSI или циклопреобразователя. При питании от CSI двигатель может перевозбуждаться, чтобы использовать напряжение машины для коммутации.
В этом режиме работы его также называют бесколлекторным двигателем (CLM). Двигатель может питаться от VSI или CSI или циклопреобразователя. При питании от CSI двигатель может перевозбуждаться, чтобы использовать напряжение машины для коммутации.
Форма кривой входного напряжения и тока для характеристики синхронного двигателя несинусоидальны. Временные гармоники формы волны приводят к пульсациям крутящего момента и нагреву якоря. Эти эффекты минимальны при использовании циклоконвертера. В случае питания CSI присутствуют всплески напряжения. Они влияют на изоляцию двигателя и номинальное напряжение инвертора.
[решено] Для синхронного двигателя n
Этот вопрос ранее задавался в
PSPCL JE EE 2019 Shift 1 Previous Year Paper
Посмотреть все PSPCL JE Papers >
- прямая линия, параллельная оси Y
- прямая линия под углом 45 градусов к оси X
- параболическая линия между двумя осями
- 2 прямая 9 линия, параллельная оси X
Вариант 1: прямая линия, параллельная оси Y
Свободно
ST 1: цепи постоянного тока
3,9 тыс. пользователей
пользователей
20 вопросов
20 баллов
25 минут
Синхронный двигатель:
- Это двигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с частотой питающего тока; период вращения точно равен целому числу циклов переменного тока.
- Работа синхронного двигателя обусловлена взаимодействием магнитных полей статора и ротора.
- Обмотка статора обеспечена 3-фазным питанием, а обмотка ротора обеспечена питанием постоянного тока.
- Он называется синхронным двигателем, потому что ротор вращается с той же скоростью, что и вращающееся магнитное поле.
- Это двигатель с постоянной скоростью, поскольку даже при увеличении нагрузки двигатель продолжает работать с той же синхронной скоростью.
- Синхронные двигатели используются там, где требуется точная и постоянная скорость, например, в шаровых мельницах, часах, проигрывателях и т. д.
 д.
д.Крутящий момент, развиваемый синхронным двигателем:
\({T_d} = \frac{{{P_d}}}{{2\pi {N_s}}}\) …1)
Где,
T d = развиваемый крутящий момент
P d = мощность, развиваемая двигателем
N s = синхронная скорость
9 ось крутящего момента, поскольку двигатель является «двигателем с постоянной скоростью».
Рис. Моментно-скоростная характеристика синхронного двигателя.
- Таким образом, для синхронного двигателя характер характеристики скорости-крутящего момента, если крутящий момент находится по оси Y, а скорость по оси X, представляет собой прямую линию, параллельную оси Y.
Примечание:
Из уравнения 1) кажется, что крутящий момент и скорость обратно пропорциональны, для которого ответом будет «параболическая линия между двумя осями», но помните, что синхронный двигатель — это двигатель с постоянной скоростью (в скорость которых не меняется и остается N s ).