Содержание
Линейные электродвигатели
- Подробности
- Категория: Электрические машины
- электродвигатель
Интересные и широкие перспективы развития электропривода связаны с применением так называемых линейных двигателей.
Большое число производственных механизмов и устройств имеют поступательное или возвратно-поступательное движение рабочих органов (подъемно-транспортные машины, механизмы подач различных станков, прессы, молоты и т. д.). В качестве привода этих механизмов и устройств до недавнего времени использовались обычные электродвигатели в сочетании со специальными видами механических передач (кривошипно-шатунный механизм, передача винт — гайка), преобразовывавших вращательное движение двигателей в прямолинейное движение рабочего органа.
Применение линейных электродвигателей позволяет упростить или полностью исключить механическую передачу, повысить экономичность и надежность работы привода и производственного механизма в целом.
Специфичность конструкции линейного двигателя определила появление и некоторых специальных терминов, применяемых для обозначения отдельных его частей. В настоящее время еще не принята единая система терминологии, поэтому в технической литературе одинаковый смысл вкладываются в понятия: статор — первичный элемент — индуктор, ротор — вторичный элемент — бегун — якорь — реактивная полоса. Часть двигателя, получающая энергию из сети, названа статором (хотя она не всегда является неподвижной частью), а часть двигателя, получающая энергию со статора, названа вторичным элементом.
Рис. 1. Принцип построения линейного двигателя переменного тока.
Линейные двигатели могут быть асинхронными, синхронными и постоянного тока, повторяя по принципу своего действия соответствующие двигатели вращательного движения.
Наибольшее распространение получили асинхронные линейные двигатели, которые мы и рассмотрим вначале. Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать (рис. 1) статор 1 и ротор 4 с обмотками 2 и 3 обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость, как это и показано на рисунке. Образовавшаяся «плоская» конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки 2 статора такого двигателя подключить к сети переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления т:
1) статор 1 и ротор 4 с обмотками 2 и 3 обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость, как это и показано на рисунке. Образовавшаяся «плоская» конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки 2 статора такого двигателя подключить к сети переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления т:
Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки 3 ротора и индуктирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по известному правилу Ленда, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться с некоторым отставанием (скольжением) от магнитного поля, как и в обычном асинхронном двигателе.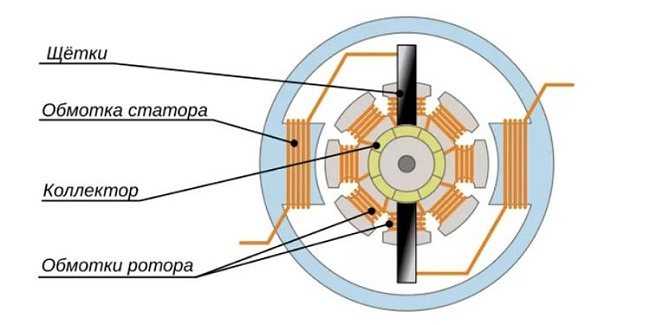
Рис. 2. Линейные двигатели.
а — с длинным вторичным элементом; б — с коротким вторичным элементом; в — двухстаторный; г —с сердечником; 5 — со вторичным элементом в виде полосы.
Представленная на рис. 1 конструкция представляет собой линейный двигатель с одинаковыми размерами статора и вторичного элемента. Помимо такой конструкции, в зависимости от назначения линейного двигателя вторичный элемент может быть длиннее статора (рис. 2,а) или короче его (рис. 2,6). Такие двигатели получили соответственно название двигателей с коротким статором и коротким вторичным элементом.
Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Часто — и в этом одно из достоинств линейного асинхронного двигателя — в качестве вторичного элемента используется металлический лист (полоса), как это показано на рис. 2Д. Вторичный элемент при этом может располагаться также между двумя статорами (рис. 2,в) или между статором и ферромагнитным сердечником (рис. 2,г). Двигатель с конструктивной схемой, приведенной на рис. 2,6, получил название двигателя с односторонним статором, со схемой по рис. 2,в — с двусторонним статором и со схемой по рис. 2,г — с односторонним статором и сердечником.
2,г). Двигатель с конструктивной схемой, приведенной на рис. 2,6, получил название двигателя с односторонним статором, со схемой по рис. 2,в — с двусторонним статором и со схемой по рис. 2,г — с односторонним статором и сердечником.
Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы, как, например, на рис. 2,в, г. Некоторое распространение получили составные сложные вторичные элементы с прилегающими друг к другу полосами из немагнитного и ферромагнитного материала, при этом ферромагнитная полоса выполняет роль части магнитопровода.
Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока.
Отметим, что линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте.
Разновидностями линейных асинхронных двигателей являются дуговой и трубчатый (коаксиальный) двигатели.
Рис. 3. Дуговой двигатель.
Дуговой двигатель характеризуется расположением обмотки на части окружности, как это показано на рис. 3. Особенностью этого двигателя является зависимость частоты вращения его ротора I от длины дуги, на которой располагаются обмотки 2 статора 3.
Пусть обмотки статора располагаются на дуге, длина которой соответствует центральному углу сс=2тр, где т — длина полюсного деления и р — число пар полюсов. Тогда за один период тока вращающееся поле статора совершит поворот на угол. а в течение
одной минуты поле повернется на оборотов, т. е. будет иметь частоту вращения яр, об/мин. Выбирая различные а, можно выполнять дуговые двигатели с различными частотами вращения ротора.
е. будет иметь частоту вращения яр, об/мин. Выбирая различные а, можно выполнять дуговые двигатели с различными частотами вращения ротора.
Одна из типовых конструкций трубчатого линейного двигателя представлена на рис. 4.
Статор двигателя 1 имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки 2 (обмотки статора) и металлические шайбы 3, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент 4 также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуктирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении.
Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Рис. 4. Трубчатый (коаксиальный) линейный двигатель.
Рассмотрим теперь несколько типовых практических конструкций линейных асинхронных двигателей в совокупности с производственными механизмами.
Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей. Одно из них, уже отмеченное выше, определяется прямолинейностью движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств.
Рис. 5. Сочленение линейного двигателя с транспортным средством.
Другое, не менее важное обстоятельство связано с независимостью силы тяги от силы сцепления колес с рельсовым путем, что недостижимо для обычных систем электрической тяги.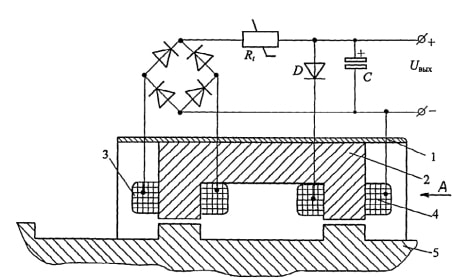 Поэтому ускорения и скорости движения средств транспорта при использовании линейных двигателей могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, динамической устойчивостью ходовой части транспорта и пути. Исключается при использовании линейных двигателей и буксование колес электрического транспорта.
Поэтому ускорения и скорости движения средств транспорта при использовании линейных двигателей могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, динамической устойчивостью ходовой части транспорта и пути. Исключается при использовании линейных двигателей и буксование колес электрического транспорта.
Одна из возможных конструктивных схем сочленения линейного двигателя с рельсовым транспортным средством показана на рис. 5. Линейный двигатель, укрепленный на тележке 3 подвижного состава, имеет конструкцию с двусторонним статором 1. Вторичным элементом является укрепленная между рельсами полоса 2. Напряжение на статор двигателя подается с помощью скользящих контактов.
Известны также конструкции линейных двигателей, где вторичным элементом являются рельс или элементы
несущей конструкции. Такие схемы характерны, в частности, для монорельсовых пассажирских и грузовых дорог и механизмов передвижения кранов..jpg) На рис. 6 в качестве примера показаны отечественный линейный двигатель, сконструированный для монорельсовой дороги. Этот двигатель имеет двусторонний статор 1 с обмоткой 2, внутри которого находится вторичный элемент в виде полосы 3. Статор двигателя перемещается по полосе с помощью несущих роликов 5. Ролики 4 служат для взаимной фиксации статора и вторичного элемента в горизонтальном направлении. Технические данные этого двигателя следующие: максимальная сила тяги 3800 Н, скорость двигателя 37 км/ч, номинальный ток 200 А, коэффициент полезного действия 50%,коэффициент мощности 0,4. Двигатель питается от трехфазной сети переменного тока частотой 50 Гц и напряжением 380 В.
На рис. 6 в качестве примера показаны отечественный линейный двигатель, сконструированный для монорельсовой дороги. Этот двигатель имеет двусторонний статор 1 с обмоткой 2, внутри которого находится вторичный элемент в виде полосы 3. Статор двигателя перемещается по полосе с помощью несущих роликов 5. Ролики 4 служат для взаимной фиксации статора и вторичного элемента в горизонтальном направлении. Технические данные этого двигателя следующие: максимальная сила тяги 3800 Н, скорость двигателя 37 км/ч, номинальный ток 200 А, коэффициент полезного действия 50%,коэффициент мощности 0,4. Двигатель питается от трехфазной сети переменного тока частотой 50 Гц и напряжением 380 В.
На рис. 7 показан пример использования линейных асинхронных двигателей для механизмов транспортировки грузов различных изделий. Конвейер, предназначенный для перемещения сыпучего материала 1 из бункера 2, имеет металлическую ленту 3, укрепленную на барабанах 4. Металлическая лента проходит внутри статоров 5 линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
Рис. 6. Линейный двигатель для монорельсовой дороги.
Рис. 7. Линейный двигатель для транспортеров.
Большой интерес представляет использование линейного двигателя для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Конструктивная схема такого молота показана па рис. 8. Статор линейного двигателя 1 располагается на стреле молота 2 и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки 3. Ударная часть молота 4 является одновременно вторичным элементом двигателя.
Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки.
В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки.
Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
Широкое распространение получает линейный двигатель и в легкой промышленности, в частности в текстильном производстве. Примером использования линейного двигателя в текстильной промышленности является привод челнока или прокладчика нити ткацкого станка. Идея такого применения линейных двигателей основывается на принципиальной возможности органического объединения функций челнока и вторичного элемента линейного двигателя.
Рис. 8. Линейный двигатель для сваезабивного молота.
Одна из возможных принципиальных схем ткацкого станка показана на рис. 9. Система электропривода образована двумя цилиндрическими статорами 1 и 2,
снабженными концевыми амортизаторами 3. Вторичным элементом является легкий алюминиевый прокладчик 4 с захватом для нити, который перемещается из одного статора в другой по направляющему каналу 5.
Вторичным элементом является легкий алюминиевый прокладчик 4 с захватом для нити, который перемещается из одного статора в другой по направляющему каналу 5.
При нахождении прокладчика в статоре 1 устройство управления 6 подает напряжение на этот статор таким образом, что образовавшееся бегущее магнитное поле выталкивает прокладчик из статора. Прокладчик по направляющему каналу перелетает в другой статор, прокладывая нить, и тормозится там с помощью работающего в тормозном режиме статора 2 и амортизатора 3. Затем устройство управления переключает статор 2 для образования бегущего поля в направлении статора I, а сам статор 1 — в тормозной режим. Цикл перемещения прокладчика повторяется.
Рис. 9. Линейный двигатель для ткацких станков.
Ткацкие станки, выполненные по этому принципу, отличаются высокой производительностью, простотой автоматизации и удобством в обслуживании.
В настоящее время многие отечественные организации и заводы разрабатывают и серийно выпускают линейные асинхронные двигатели, среди них:
двигатели мощностью от нескольких ватт до 660 кВт со скоростями движения от 1,4 до 42 м/с для систем транспорта;
двухстаторные тяговые двигатели мощностью от 5 до 1000 кВт со скоростью движения 8,4—11,2 м/с для промышленного транспорта и различных производственных механизмов;
одностаторные тяговые двигатели для транспорта мощностью 26, 120 и 660 кВт со скоростью движения соответственно 10, 25,2 и 33,6 м/с;
тяговые двигатели с использованием рельса в качестве вторичного элемента;
линейные микродвигатели переменного и постоянного тока для привода машин легкой промышленности и для самопишущих измерительных приборов.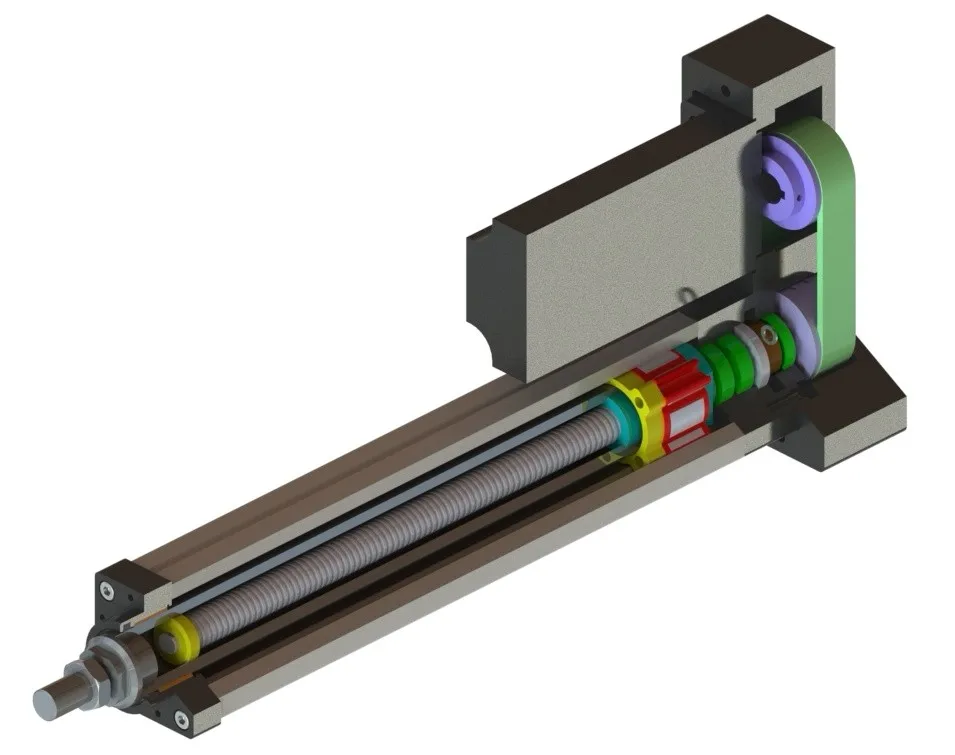
Таблица 1
| Тип привода-толкателя | Номинальное усилие, Н | Ход штока, м | Время хода, с | Полезная мощность, Вт |
ПТЛ-75 | 750 | 0,15 | 0,33 | 330 |
ЛТЛ-150 | 1500 | 0,25 | 0,56 | 660 |
ПТЛ-300 | 3000 | 0,3 | 0,67 | 1320 |
ПТЛ-100 | 1000 | 0,12 | 0,27 | 441 |
ПТЛ-200 | 2000 | 0,2 | 0,4 | 880 |
ПТЛ-600 | 6000 | 0,4 | 0,89 | 2640 |
В табл. 1 приведены технические данные цилиндрических линейных асинхронных двигателей, исиользуемых в безредукторном приводе-толкателе со скоростью движения штока 0,45 м/с.
1 приведены технические данные цилиндрических линейных асинхронных двигателей, исиользуемых в безредукторном приводе-толкателе со скоростью движения штока 0,45 м/с.
Таблица 2
| Тип двигателя | Мощность, кВт | Скорость бегущего поля, м/с | Среднее пусковое усилие, Н | КПД. % | Масса, кг |
ЛАД 1 | 40 | 12 | 450 | 64 | 690 |
ЛАД 2 | 40 | 18 | 600 | 63 | 700 |
ЛАД 3 | 120 | 12 | 1100 | 70 | 870 |
Для привода слитковозов в прокатном производстве разработаны линейные асинхронные двигатели, технические данные которых приведены в табл.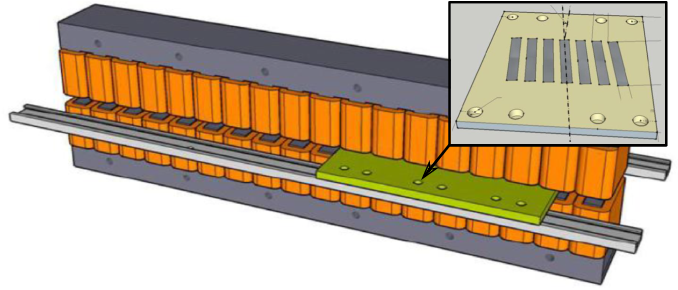 2.
2.
Наряду с асинхронными линейными двигателями применяются линейные двигатели постоянного тока. Они чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных пусковых усилий.
Кроме того, линейные двигатели постоянного тока (как и двигатели вращательного движения) позволяют при необходимости просто регулировать скорость движения рабочих органов. Рассмотрим примеры применения этих двигателей.
На рис. 10 показана схема привода продольного хода стола плоскошлифовального станка с использованием линейного двигателя постоянного тока. На столе 1 станка расположен вторичный элемент (якорь) 2 двигателя. Ток к обмоткам якоря подводится через коллектор 3 и щетки 4, установленные на станине 5 станка. На станине по всей длине хода якоря расположены полюсы двустороннего статора 6, при этом станина является одновременно и магнитопроводом двигателя.
На рис. 11 показана еще одна конструктивная схема линейного двигателя постоянного тока, который применяется для перемещения промышленных изделий. Этот двигатель по существу представляет собой двигатель постоянного тока с полым цилиндрическим якорем, разрезанный по образующей и развернутый в плоскость.
Этот двигатель по существу представляет собой двигатель постоянного тока с полым цилиндрическим якорем, разрезанный по образующей и развернутый в плоскость.
Рис. 11. Линейный двигатель для транспортировки изделий.
Рис. 10. Линейный двигатель для шлифовального станка.
Подвижная часть двигателя — якорь — состоит из немагнитного остова 1 и укрепленной на нем обмотки 2 якоря, которая может быть выполнена из изолированного обмоточного провода или изготовлена из медной фольги путем ее травления. Ширина витков обмотки в направлении движения, как и в обычных двигателях постоянного тока, близка к полюсному делению (т. е. расстоянию по окружности между полюсами магнитной системы двигателя). Токоподвод к обмотке осуществляется с помощью коллектора 3 и щеток 4. На станине двигателя 5 крепится комплект полюсов 6 с обмотками возбуждения 7, размещенных в ряд по направлению движения якоря. Другими частями магнитопровода двигателя являются стальные сердечники 8 и сама станина, выполненная также из ферромагнитного материала. Якорь двигателя вместе со столиком 9 для крепления перемещаемого изделия 10 движется по неподвижным опорам 11 так, что его плоскости с обмотками все время находятся в зазоре между сердечниками 8 и полюсами 6.
Якорь двигателя вместе со столиком 9 для крепления перемещаемого изделия 10 движется по неподвижным опорам 11 так, что его плоскости с обмотками все время находятся в зазоре между сердечниками 8 и полюсами 6.
На принципе работы линейного двигателя основано действие специальных насосов для перекачки электропроводящих жидкостей и в том числе жидких металлов. Такие насосы, часто называемые магнитогидродинамическими, широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя.
Магнитогидродинамические насосы (МГД-насосы) могут быть постоянного или переменного тока. Конструктивная схема МГД-насоса постоянного тока показана на рис. 12.
Первичным элементом — статором двигателя является С-образный электромагнит 1 (для упрощения рисунка его обмотка возбуждения не показана). В воздушный зазор электромагнита помещается трубопровод 2 с жидким металлом. С помощью электродов 3, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника.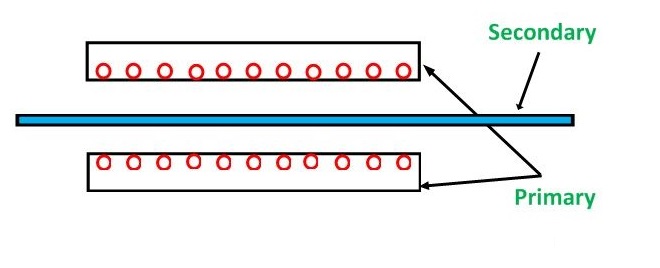 Часто обмотка возбуждения включается последовательно в цепь электродов 3.
Часто обмотка возбуждения включается последовательно в цепь электродов 3.
Рис. 12. Магнитогидродинамический насос постоянного тока.
При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле (см. рис. I). Под действием этой силы металл начнет перемещаться по трубопроводу, причем направление его движения просто определить по известному правилу левой руки.
Один из выполненных МГД-насосов этого типа имеет следующие данные: потребляемая мощность 625 кВт, ток 250 000 А, напряжение 2,5 В, КПД 62,5%. Насос обеспечивает транспортировку жидкого натрия при температуре 800°С со скоростью 12,4 м/с по каналу сечением 53×15,2 см2. Номинальный расход насоса 3670 м3/ч при напоре 39 Н/см2.
Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла.
Принцип линейного двигателя используется при разработке реактивных плазменных двигателей космических ракет. Модель такого плазменного двигателя можно также изобразить с помощью схемы, приведенной на рис. 12, где место жидкого металла заняла плазма — высокотемпературный (400°С и более) ионизированный и поэтому токопроводящий газ. Электроэнергию для работы такого двигателя предполагается получить с помощью ядерного реактора.
В последние годы все шире используются синхронные линейные двигатели. Основной областью применения этих двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице.
Следует при этом отметить, что применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с так называемой магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Рассмотрим конкретные примеры использования линейных синхронных двигателей для транспорта. На рис. 13 показана схема путепровода и вагона электропоезда со скоростью движения 400—500 км/ч, предназначенного для перевозки 100 пассажиров.
Тяговый синхронный линейный двигатель имеет электромагнитное возбуждение с использованием сверхпроводящих магнитов. Обмотка возбуждения 1 состоит из ряда катушек, равномерно укрепленных под днищем вагона 5. В криогенной системе охлаждения обмоток используется жидкий гелий. Плоская трехфазная обмотка переменного тока 2 уложена в бетонное полотно дороги и питается от трехфазного инвертора, преобразующего напряжение постоянного тока в трехфазное напряжение переменного тока (здесь кратко рассмотрен принцип действия инвертора). С помощью инвертора осуществляются пуск, изменение скорости движения и торможение поезда. Номинальный ток обмотки 250 А; длина секции обмоток, одновременно включаемых на напряжение, 5 км. Номинальная мощность двигателя 5,2 МВт, номинальное тяговое усилие 40 кН, cos φ=0,92, коэффициент полезного действия 72%.
С помощью инвертора осуществляются пуск, изменение скорости движения и торможение поезда. Номинальный ток обмотки 250 А; длина секции обмоток, одновременно включаемых на напряжение, 5 км. Номинальная мощность двигателя 5,2 МВт, номинальное тяговое усилие 40 кН, cos φ=0,92, коэффициент полезного действия 72%.
Путепровод 6 представляет собой бетонное полотно шириной 3,7 м, плоский характер поверхности которого выбран с целью снижения накопления льда и снега.
Рис. 13. Линейный синхронный двигатель для привода подвижного состава.
Вагон подвешивается над полотном дороги на высоте 15 см с помощью специальной системы магнитной подвески. Эта система состоит из удлиненных сверхпроводящих электромагнитов 3, расположенных по краям днища вагона, и плоских алюминиевых полос 4, укрепленных в полотне дороги. Принцип работы системы магнитной подвески основывается на действии электродинамических сил, возникающих при взаимодействии потоков сверхпроводящих электромагнитов 3 на борту вагона и вихревых токов, наведенных в алюминиевых полосах 4. Расисты показали, что при использовании магнитной подвески масса вагона оказывается на 20 т меньше, чем при системе подвески на воздушной подушке.
Расисты показали, что при использовании магнитной подвески масса вагона оказывается на 20 т меньше, чем при системе подвески на воздушной подушке.
Для обеспечения поперечной устойчивости поезда при его движении применяется специальная система стабилизации. Она предусматривает укладку дополнительной обмотки (на рисунке не показана) вдоль оси дорожного полотна и основана на взаимодействии токов в этой обмотке с полем тяговых электромагнитов.
Разработанная система электрической тяги с применением описанного выше синхронного линейного двигателя отличается хорошими эксплуатационными показателями, однако для ее работы необходима укладка обмоток в полотно дороги, что удорожает изготовление системы и усложняет ее обслуживание, особенно при значительной протяженности дороги. В связи с этим были разработаны конструкции линейных синхронных двигателей, которые не требуют укладки обмоток в железнодорожное полотно. К их числу относятся линейные синхронные двигатели с так называемым униполярным возбуждением и когтеобразными полюсами. Двигатели того и другого исполнения были использованы для привода 50-тонного состава со скоростью движения 480 км/ч. Параметры двигателей: номинальная мощность 1340 кВт, тяговое усилие 106 Н, частота напряжения переменного тока 350 Гц. Расчетное значение коэффициента мощности равно 1, а коэффициента полезного действия 91— 96%. Масса двигателей при зазоре между составом и вторичным элементом в 1,5 см не превышает 4 т.
Двигатели того и другого исполнения были использованы для привода 50-тонного состава со скоростью движения 480 км/ч. Параметры двигателей: номинальная мощность 1340 кВт, тяговое усилие 106 Н, частота напряжения переменного тока 350 Гц. Расчетное значение коэффициента мощности равно 1, а коэффициента полезного действия 91— 96%. Масса двигателей при зазоре между составом и вторичным элементом в 1,5 см не превышает 4 т.
Рис. 14. Линейный синхронный двигатель с униполярным возбуждением.
На рис. 14 показана конструктивная схема синхронного линейного двигателя с униполярным возбуждением. Двигатель имеет два статора 1, установленных на подвижной части состава. Бегущее магнитное поле создается с помощью обмоток 2, подключаемых к сети переменного тока. Статоры соединяются магнитопроводом 3, на котором расположена обмотка униполярного возбуждения 4. Эта обмотка создает постоянный по направлению магнитный поток Фп, который пронизывает ферромагнитный вторичный элемент 5, укладываемый в. путепровод. Взаимодействие бегущего магнитного поля с намагниченным вторичным элементом создает силу тяги подвижного состава.
путепровод. Взаимодействие бегущего магнитного поля с намагниченным вторичным элементом создает силу тяги подвижного состава.
Сопоставление линейных синхронных двигателей с униполярным возбуждением и когтеобразными полюсами с асинхронным линейным двигателем на то же тяговое усилие показало, что последний имеет худший коэффициент мощности (около 0,6), более низкий КПД (около 80%) и большую массу на единицу мощности двигателя.
- Назад
- Вперёд
- Вы здесь:
- Главная
- Оборудование
- Эл. машины
- Линейные электродвигатели
Еще по теме:
- Испытания по определению электрических величин электрических машин
- Основные повреждения электродвигателей
- Двигатели типа ДАБ
- Методы сушки электрических машин
- Автоматизация испытаний электрических машин
Цилиндрический линейный двигатель — новый этап эволюции электроэрозионных станков
Основные изменения, происходившие в приводной части станков за последний век, связаны с постепенным приближением двигателя к рабочему органу.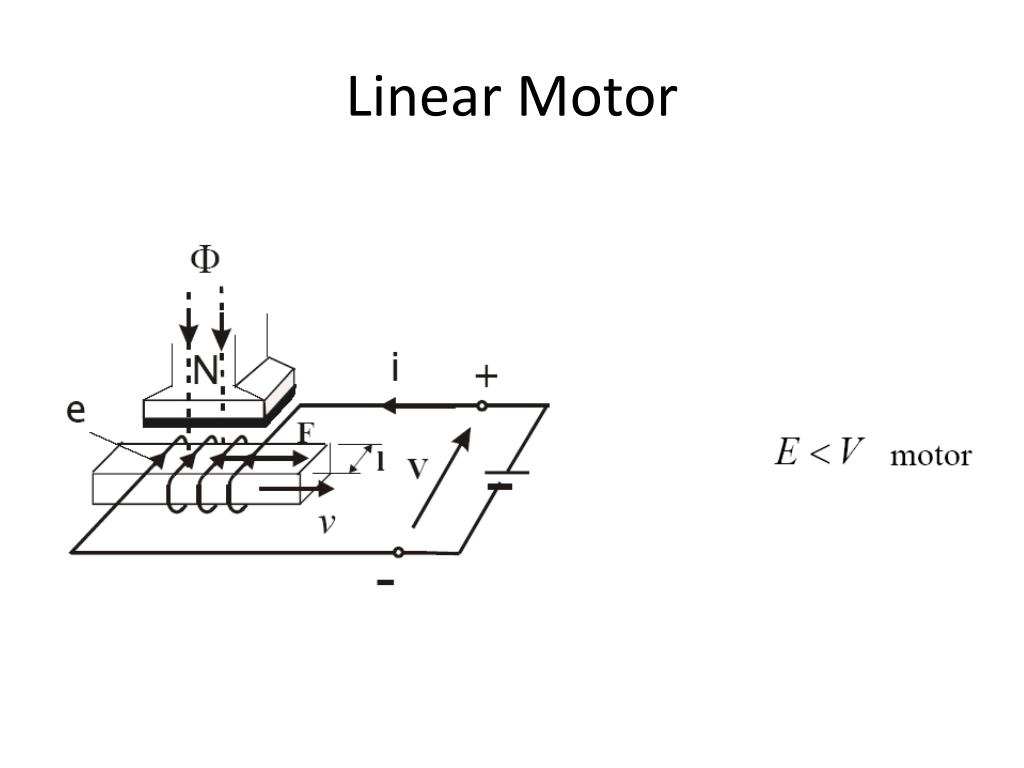 На этом пути были массивные коробки подач с огромным количеством промежуточных элементов кинематической цепи, двух-трех ступенчатые редукторы, ременные передачи, прямые приводы через муфту. Всегда переход к следующему этапу был связан с применением последних научных разработок, получивших тем или иным способом свое приложение в станкостроении, появлением новых технологий либо удешевлением существующих. Изначально крайне дорогими являлись приводы на основе регулируемых электродвигателей и с шарико-винтовыми парами (ШВП), поэтому лишь отдельные производители находили целесообразным их использование. В наши дни уже сложно представить современный станок, который бы обошелся без ШВП или в котором величина подачи регулируется ступенчато, за счет перемещения блоков зубчатых колес.
На этом пути были массивные коробки подач с огромным количеством промежуточных элементов кинематической цепи, двух-трех ступенчатые редукторы, ременные передачи, прямые приводы через муфту. Всегда переход к следующему этапу был связан с применением последних научных разработок, получивших тем или иным способом свое приложение в станкостроении, появлением новых технологий либо удешевлением существующих. Изначально крайне дорогими являлись приводы на основе регулируемых электродвигателей и с шарико-винтовыми парами (ШВП), поэтому лишь отдельные производители находили целесообразным их использование. В наши дни уже сложно представить современный станок, который бы обошелся без ШВП или в котором величина подачи регулируется ступенчато, за счет перемещения блоков зубчатых колес.
Характерно то, что на каждом этапе никогда сразу не появлялась конструкция, оптимальная во всех отношениях. Совершенствование всегда происходило путем проб и ошибок, последовательной доработкой и устранением недостатков. В конечном итоге повсеместное распространение получали конфигурации узлов, прошедшие проверку временем, длительной эксплуатацией и доказавшие свою экономическую эффективность.
В конечном итоге повсеместное распространение получали конфигурации узлов, прошедшие проверку временем, длительной эксплуатацией и доказавшие свою экономическую эффективность.
Рис. 1. ШВП
Такой вот отработанной, давно зарекомендовавшей себя, проверенной конструкцией является на данный момент привод с использованием ШВП, связанной с двигателем напрямую посредством муфты, реже ремня или зубчатой передачи. Производство всех элементов привода уже давно отработано, технологии оптимизированы, поэтому и стоимость вполне конкурентоспособна.
Тем не менее, желание конструкторов максимально сократить кинематическую цепь никуда не исчезло. Последней ступенькой, через которую надо было перешагнуть, стала шарико-винтовая пара. И сделать это позволили линейные двигатели.
Применение линейных двигателей в приводах подач современных станков является тем закономерным результатом, к которому привела их эволюция на протяжении десятков последних лет. Однако сейчас использование линейных приводов находится лишь на начальной стадии. Технология их изготовления до сих пор не до конца автоматизирована, цена высока, а применение далеко не всегда уместно. Линейный двигатель не получил своего «эталонного» воплощения (или ряда таких воплощений, испытанных временем, выбор из которых производится в зависимости от специфики использования) и существуют различные конструктивные исполнения, которые, несмотря на ряд безусловных общих преимуществ, значительно отличаются друг от друга, имея различные сильные и слабые стороны. Это тот этап, который проходит любая инновация. И все больше производителей останавливаются на линейных двигателях для приводов подач, причем как для оборудования специфического, такого, как электроэрозионные станки, так и для фрезерных и токарных станков.
Технология их изготовления до сих пор не до конца автоматизирована, цена высока, а применение далеко не всегда уместно. Линейный двигатель не получил своего «эталонного» воплощения (или ряда таких воплощений, испытанных временем, выбор из которых производится в зависимости от специфики использования) и существуют различные конструктивные исполнения, которые, несмотря на ряд безусловных общих преимуществ, значительно отличаются друг от друга, имея различные сильные и слабые стороны. Это тот этап, который проходит любая инновация. И все больше производителей останавливаются на линейных двигателях для приводов подач, причем как для оборудования специфического, такого, как электроэрозионные станки, так и для фрезерных и токарных станков.
Использование линейных двигателей оправдано для прецизионного оборудования и в том случае, когда большую роль играет динамическая характеристика привода: максимально допустимые ускорения, величины максимально и минимально допустимых скоростей. Тем не менее, даже на оборудование такого класса линейные привода устанавливаются, зачастую, лишь в маркетинговых целях, ведь ультрапрецизионное оборудование по умолчанию должно быть «напичкано» инновациями, позволяющими добиться высочайшей точности, недоступной конкурентам. При этом позабытыми оказываются как экономическая эффективность использования таких приводов, которая приводит к неоправданному повышению стоимости обработки, так и технологическая необходимость такого решения в целом.
При этом позабытыми оказываются как экономическая эффективность использования таких приводов, которая приводит к неоправданному повышению стоимости обработки, так и технологическая необходимость такого решения в целом.
В свете вышесказанного обращает на себя внимания стратегия, выбранная компанией Mitsubishi Electric. Более 40 лет назад компания представила свой первый электроэрозионный проволочно-вырезной станок, а уже в 1978 году — серийный высокоскоростной и высокоточный 4-х координатный электроэрозионный проволочно-вырезной обрабатывающий станок.
Рис. 2. Mitsubishi NA1200
Сегодня ноу-хау, накопленное за многие десятилетия в сочетании с интенсивной исследовательской работой, остаются решающим критерием при разработке новых систем электроэрозионной обработки. Являясь одним из ведущих производителей электроэрозионного оборудования и в то же время одним из крупнейших производителей линейных двигателей, японская фирма вплоть до недавнего времени не устанавливала их на свои станки. Лишь в 2009 году на станках серии NA (рис. 2) впервые были применены линейные двигатели (цилиндрические). Возникает вопрос, почему гигантская корпорация отказывается от использования в своем оборудовании своих же собственных компонентов, несмотря на то, что эти компоненты (линейные двигатели) успешно продаются по всему миру?
Лишь в 2009 году на станках серии NA (рис. 2) впервые были применены линейные двигатели (цилиндрические). Возникает вопрос, почему гигантская корпорация отказывается от использования в своем оборудовании своих же собственных компонентов, несмотря на то, что эти компоненты (линейные двигатели) успешно продаются по всему миру?
Стоит внимательно присмотреться к конкретным конструкциям, чтобы получить ответ на этот вопрос.
На сегодняшний день наиболее распространенными в металлообрабатывающих станках являются плоские линейные двигатели. Принципиальная схема такого двигателя приведена на рис. 3.
Рис. 3. Плоский линейный двигатель: принципиальная схема
Двигатель состоит из двух основных частей: ползуна, представляющего собой сердечник 1 с обмотками 2 и неподвижной частью с постоянными магнитами 3.
Как раз наличие сердечника и является основным источником характерных данному типу двигателей недостатков:
Значительное тепловыделение при работе.

При функционировании линейного двигателя через обмотки проходит электрический ток и, согласно закону Джоуля-Ленца, происходит их нагрев. Это не является особенностью данной конкретной конструкции и свойственно любому проводнику с током. Однако не для любого проводника с током тепловые деформации играют столь существенную роль, как в металлообработке, особенно когда речь идет о прецизионном оборудовании!
Кроме того дополнительным источником тепла является сердечник, в котором при движении ползуна появляются вихревые токи Фуко, способствующие его дополнительному нагреву.
Усугубляет ситуацию то, что отвод излишнего тепла в окружающую среду крайне затруднен. Сверху на ползуне смонтирован стол, снизу на минимальном расстоянии находится плита с постоянными магнитами. Таким образом, практически все тепло, выделяющееся при работе двигателя, передается на стол станка, вызывая тепловые деформации, ведущие к перекосам рабочего органа и, как следствие, недопустимым погрешностям обработки, чрезмерному износу направляющих.
Рис. 4. Тепловыделение в плоском линейном двигателе
Максимальная температура может превышать 100°С! Безусловно, ни о какой высокой точности говорить при таких значениях температуры нельзя. Поэтому использование плоского линейного двигателя абсолютно нецелесообразно без мощной системы охлаждения.
Оснащение конструкции охлаждающим контуром практически полностью решает проблему чрезмерного тепловыделения, но очевидно, что такая мощная система охлаждения значительно увеличивает стоимость двигателя, расходы на эксплуатацию станка и напрямую отражается на себестоимости обработки.
Наличие постоянной силы магнитного притяжения.
На сердечник плоского линейного двигателя постоянно воздействует сила притяжения со стороны магнитов.
Рис. 5. Сила притяжения, воздействующая на сердечник
Эта сила воздействует постоянно и не изменяет своего значения при работе двигателя. Согласно данным каталога фирмы Mitsubishi Electric величина силы магнитного притяжения колеблется в пределах 500–7000Н в зависимости от типоразмера линейного двигателя.
Таким образом, возрастает нагрузка на направляющие станка, что усиливает их износ, кроме того увеличиваются и потери на трение в направляющих, и, как следствие, снижается КПД привода.Кроме того очень важно, что сила магнитного взаимодействия напрямую зависит от зазора Δ между частями плоского линейного двигателя. При отклонении зазора от номинального сила может увеличиваться или уменьшаться в пределах 30%.
Рис. 6. Зависимость силы притяжения от зазора в двигателе
Рассмотренная зависимость позволяет говорить о высокой чувствительности плоского линейного двигателя к изменению величины воздушного зазора между его частями. Практически это влечет к появлению дополнительных сложностей, возникающих при сборке и монтаже приводов с плоскими линейными двигателями.
Кроме нормальной составляющей силового взаимодействия магнитов и сердечника, существует также воздействие, направленное параллельного вектору перемещения двигателя. Подробнее об этом, а также о последствиях расписано в следующем пункте.
Ограничения по плавности движения.
Общее поле, создаваемое постоянными магнитам (что видно и из рис. 7), будет являться неоднородным: в каких-то местах плотность потока индукции будет выше, чем в других. Силовое взаимодействие между сердечником плоского линейного двигателя и магнитами имеет составляющую, параллельную направлению перемещения ползуна. Конструктивно эти явления вызваны в первую очередь наличием расстояния между магнитами, которое приводит к неоднородности магнитного поля.
Рис. 7. Поле постоянных магнитов
Горизонтальная составляющая силового воздействия изменяется соответственно изменению вектора и плотности потока магнитной индукции: в каких-то местах она достигает своего максимума, в каких-то практически равна нулю. Следствием этого является наличие так называемых «предпочтительных положений» у плоского линейного двигателя. Т.е. на всей величине хода присутствуют положения, которые соответствуют минимуму потенциальной энергии.
Ползун сам стремится занять такое положение, а для вывода из него требуется приложить усилие.Экспериментально полученные данные, отражающие колебания выходного усилия привода, приведены на рис. 8.
Рис. 8. Колебания выходного усилия
Характеристика на рисунке была получена следующим образом: при перемещении двигателя с постоянной скоростью с усилителя снимаются данные об изменении тока. Таким образом, при известной скорости двигателя и его силовой постоянной, получается зависимость, приведенная на рисунке.
Такие колебания силы накладывают определенные ограничения на плавность движения двигателя, на качество получаемой поверхности, если речь идет о приводе металлообрабатывающего станка, и на точность обработки. Основные методы борьбы: установка магнитов под углом, использование программных средств и прочее, позволяют значительно снизить амплитуду колебания, но не устраняют его полностью, к тому же способствуют удорожанию изготовления двигателя и станка в целом.
На рис. 9 наглядно показаны изменения поля, создаваемого постоянными магнитами после их установки под углом.
Рис. 9. Изменение пространственного распределения плотности магнитного потока при использовании конструкции с повернутыми магнитами
На рис. 10 приведено уменьшение колебаний силы при использовании измененной конструкции.
Рис. 10. Уменьшение колебаний силы при установке магнитов под углом
Общая неэффективность конструкции.
Конструкция плоского линейного двигателя изначально геометрически неэффективна. Как видно из рис. 11, для совершения работы по перемещению задействована лишь «верхняя» часть магнитного потока. Таким образом, крайне дорогостоящие редкоземельные магниты, которые применяются во всех типах линейных двигателей, используются менее чем на 50%.
Рис. 11. Распределение магнитного потока
 Таким образом, возрастает нагрузка на направляющие станка, что усиливает их износ, кроме того увеличиваются и потери на трение в направляющих, и, как следствие, снижается КПД привода.
Таким образом, возрастает нагрузка на направляющие станка, что усиливает их износ, кроме того увеличиваются и потери на трение в направляющих, и, как следствие, снижается КПД привода.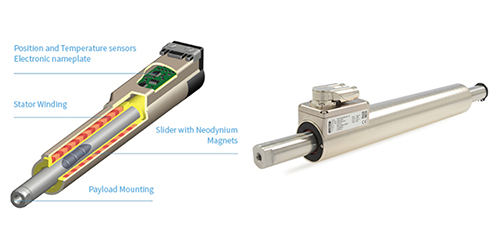
 Ползун сам стремится занять такое положение, а для вывода из него требуется приложить усилие.
Ползун сам стремится занять такое положение, а для вывода из него требуется приложить усилие.
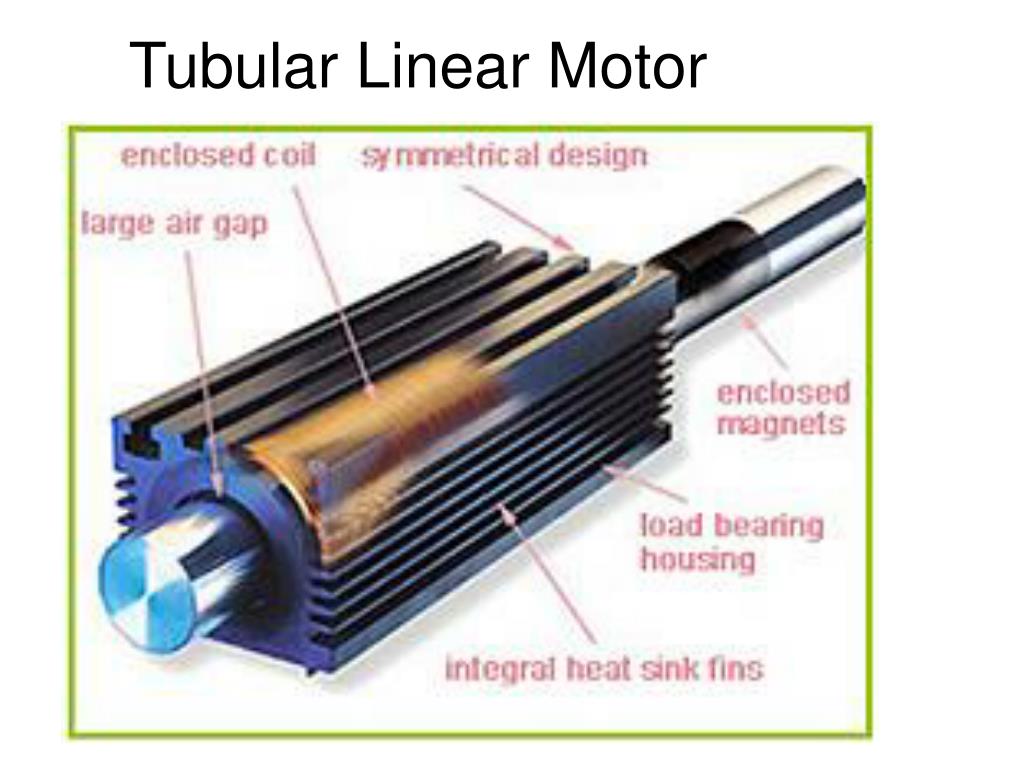
Рассмотрим теперь линейный двигатель, использованный компанией Mitsubishi Electric. В ультрапрецизионном станке Mitsubishi NA 1200 в качестве приводов по осям X, Y, U, V использованы цилиндрические линейные двигатели
В ультрапрецизионном станке Mitsubishi NA 1200 в качестве приводов по осям X, Y, U, V использованы цилиндрические линейные двигатели
Принципиальная схема цилиндрического линейного двигателя представлена на рис. 12. Особенность его конструкции заключается в том, что обмотки 2 расположены вокруг сформированных в виде цилиндра постоянных магнитов 1, а сердечника нет в принципе!
Рис. 12. Цилиндрический линейный двигатель: принципиальная схема
Цилиндрический линейный двигатель, благодаря своей конструкции, лишен всех рассмотренных выше недостатков плоского линейного двигателя. Остановимся подробнее на каждом из них.
Тепловыделение.
Цилиндрический линейный двигатель не требует специальной отдельной системы охлаждения. То тепло, которое неизбежно выделяется в обмотках, эффективно отводится окружающей средой и непосредственно на стол станка передается незначительная его часть.
Плюс в конструкции нет сердечника — источника дополнительного нагрева под действием вихревых токов.Рис. 13. Схема отвода тепла в цилиндрическом линейном двигателе
В результате испытаний (перемещение стола на длину 200 мм со скоростью 1 м/с, ускорением 1 G, задержкой 1 с в каждом из концов хода) было установлено, что повышение температуры стола не превышает 5°С. Графически результаты представлены на рис. 14.
Рис. 14. Прирост температуры стола станка с цилиндрическим линейным двигателем
В принципе, при более тяжелых режимах работы температура стола может подниматься и выше оговоренных 5°С, но в любом случае значительно меньше, чем у плоского линейного двигателя.
Несмотря на это, в станках серии NA предусмотрен контур охлаждения линейных двигателей, интегрированный в общую систему термической стабилизации и динамической термической компенсации станка. Он позволяет практически ликвидировать нагрев стола, связанный с тепловыделением в обмотках линейного двигателя.
И как следствие — избавиться от тех минимальных погрешностей, которые он вызывает и которые способны оказывать воздействие на работу столь точного оборудования. При этом необходимая мощность системы охлаждения значительно меньше, а контур значительно проще, чем у плоского линейного двигателя.Нет ограничений по плавности движения.
В связи с тем, что в конструкции цилиндрического линейного двигателя нет сердечника, ему не свойственны недостатки, связанные с его наличием.
Между цилиндром и обмотками ползуна не возникает дополнительных силовых воздействий (ни в радиальном, ни в осевом направлении), поэтому движение при работе происходит плавно, без скачков нагрузки или скорости. На рис. 15 и 16 соответственно представлены графики изменения скорости при движении на высоких и низких скоростях.
Благодаря симметричной конструкции и отсутствию сердечника, колебания величины зазора принципиально не влияют на работу цилиндрического линейного двигателя, что облегчает его сборку и изготовление.
Рис. 15. Погрешность скорости (область высоких скоростей)
Рис. 16. Погрешность скорости (область низких скоростей)
Эффективное использование всего магнитного потока.
Рис. 17. Эффективное использование всего магнитного потока
Благодаря симметричности конструкции, в цилиндрическом линейном двигателе используется весь магнитный поток. Это дает дополнительное экономическое преимущество перед плоской конфигурацией, ведь для достижения того же результата требуется практически в 2 раза меньше редкоземельных магнитов, либо в 2 раза менее сильные магниты. Это весьма существенное преимущество, так как стоимость постоянных редкоземельных магнитов составляет немалую долю от общей стоимости линейного двигателя.
Ремонтопригодность.
Благодаря отсутствию механического контакта, отпадает необходимость в смазке, двигатель работает абсолютно бесшумно и не подвергается износу. Однако в случае необходимости демонтаж и монтаж цилиндрического линейного двигателя, по сравнению даже с ШПВ, осуществляется значительно проще и быстрее и не требует дополнительной юстировки, что существенно повышает его ремонтопригодность.
 Плюс в конструкции нет сердечника — источника дополнительного нагрева под действием вихревых токов.
Плюс в конструкции нет сердечника — источника дополнительного нагрева под действием вихревых токов. И как следствие — избавиться от тех минимальных погрешностей, которые он вызывает и которые способны оказывать воздействие на работу столь точного оборудования. При этом необходимая мощность системы охлаждения значительно меньше, а контур значительно проще, чем у плоского линейного двигателя.
И как следствие — избавиться от тех минимальных погрешностей, которые он вызывает и которые способны оказывать воздействие на работу столь точного оборудования. При этом необходимая мощность системы охлаждения значительно меньше, а контур значительно проще, чем у плоского линейного двигателя.
.jpg)
Вернемся к вопросу, который прозвучал в начале: почему же лишь сравнительно недавно линейные двигатели появились в станках Mitsubishi? Теперь ответить на него значительно проще.
Рис. 18. Mitsubishi MV1200R
Очевидно, что специалисты компании, в угоду желанию быть на гребне волны технического прогресса, не стали отдавать предпочтение плоским линейным двигателям, которые не устраивали их в первую очередь по экономическим показателям: высокая собственная стоимость, высокая стоимость эксплуатации и ремонта, которые неминуемо переносятся на стоимость получаемой на станке детали. До тех пор, пока использование классических приводов с ШВП было оправданно экономически и при этом позволяло добиваться высочайшей точности обработки, инженеры компании лишь присматривались к тому, как покажут себя линейные двигатели применительно к электроэрозионным станкам. В результате решение нашлось. На рынке появился относительно новый тип линейных двигателей — цилиндрический линейный двигатель (ЦЛД), который обладает рядом преимуществ по сравнению с аналогами и весьма эффективен с экономической точки зрения: низкое потребление энергии, простота производства и сборки. Все те недостатки плоских линейных двигателей, рассмотренные выше, не свойственны цилиндрическим.
Все те недостатки плоских линейных двигателей, рассмотренные выше, не свойственны цилиндрическим.
В 2009 году в производство была запущена серия ультрапрецизионных станков NA с ЦЛД. Эти станки великолепно зарекомендовали себя и заставили задуматься японских специалистов о модернизации и остальных станков, производимых фирмой. В марте 2012 года компания Mitsubishi Electric объявила о начале производства новой серии MV с ЦЛД и продемонстрировала эти станки на выставке «INTERMOLD 2012» в Осаке (Япония). Серия MV призвана заменить прекрасно себя зарекомендовавшие серии FA и BA. Притом, что новые станки обладают великолепными технологическими возможностями и превосходной точностью, главное их преимущество — в экономичности и чрезвычайно низких текущих издержках. Во многом благодаря использованию ЦЛД, станки серии MV потребляют на 69% меньше энергии, чем их предшественники и на 42% позволяют снизить стоимость обработки при 30% сокращении времени! Это действительно потрясающий результат, который позволяет утверждать, что ЦЛД будут и дальше успешно использоваться в станках компании Mitsubishi Electric.
Применение ЦЛД потребовало разработки и применения самой передовой технологии управления с использованием сверхскоростной оптоволоконной связи и системной коммуникацией в режиме реального времени. Безусловно, нас ждет дальнейшее совершенствование конструкции и системы управления, но уже сейчас можно достаточно уверенно утверждать, что применение ЦЛД в электроэрозионных станках — это инновационное решение, которое ознаменовало собой новый этап эволюции в станкостроении.
Синхронные линейные двигатели HIWIN
На главнуюКаталог товаровСервоприводСервопривод HIWIN Синхронные линейные двигатели HIWIN
Синхронные линейные двигатели HIWIN
Линейные двигатели — приводные компоненты для обеспечения поступательного или возвратно-поступательного движения. Линейные двигатели могут заменить двигатели с шарико-винтовой передачей, ременные и цепные приводы, кривошипно-шатунные механизмы, передачи типа «шестерня-рейка» в существующих или новых производственных процессах. Обеспечивают гибкость построения технологической системы, улучшенные КПД и производительность, а также более качественные характеристики управления.
Обеспечивают гибкость построения технологической системы, улучшенные КПД и производительность, а также более качественные характеристики управления.
Принцип действия синхронных линейных двигателей можно объяснить на основе принципа действия вращающихся синхронных двигателей. Если «разрезать и развернуть» синхронный серводвигатель, как это показано на рисунке, то в конце концов мы придем к структуре линейного двигателя.
Линейный двигатель состоит из первичной части — шихтованный пакет стали с обмоткой и термодатчиком и вторичной части с постоянными магнитами, заключенными в защитную оболочку. Первичная обмоточная часть (у вращающегося двигателя это статор) перемещается вдоль магнитной части линейного двигателя (у вращающегося двигателя магниты расположены на роторе). Между статором и ротором для достижения максимальной и равномерной силы тяги необходимо обеспечивать постоянную величину воздушного зазора. Охлаждение синхронных линейных двигателей основано на естественном рассеивании тепла, выделяющегося в основном в обмоточной части. Возможно использование принудительного охлаждения для более эффективного удаления избыточного тепла. Скорость перемещения подвижной части двигателя достигает 6 м/с. Величины номинальной силы тяги могут достигать 6000 Н, максимальной силы тяги — до 12600 Н.
Возможно использование принудительного охлаждения для более эффективного удаления избыточного тепла. Скорость перемещения подвижной части двигателя достигает 6 м/с. Величины номинальной силы тяги могут достигать 6000 Н, максимальной силы тяги — до 12600 Н.
Преимущества синхронных линейных двигателей по сравнению с вращающимися серводвигателями:
• могут обеспечить линейные скорости до 6 м/с и более;
• ускорения до 80 м/с2;
• прямой привод без редукторов и промежуточных передач;
• отсутствие люфта и крутильной упругости в трансмиссии приводного механизма;
• могут приводиться в движение более высокие массы нагрузки;
• более высокая точность позиционирования до ± 1,0 мкм и повторяемость движений с погрешностью до ± 2 инкрементов датчика обратной связи;
• малый износ частей двигателя.
Области применения синхронных линейных двигателей:
• металлообработка;
• упаковочные технологии;
• сборочные и обрабатывающие технологии;
• деревообработка;
• перемещение и транспортировка грузов;
• производство специальных машин
Использование линейных двигателей в качестве приводных двигателей линейных столов:
- Серии LMS/LMSA
- Серии LMF/LMFA
- Серия LMSC
- Cерия LMC
- Cерия LMT
- Загрузки
Синхронные линейные двигатели HIWIN отличаются очень высокой плотностью электромагнитного поля и минимальной пульсацией силы.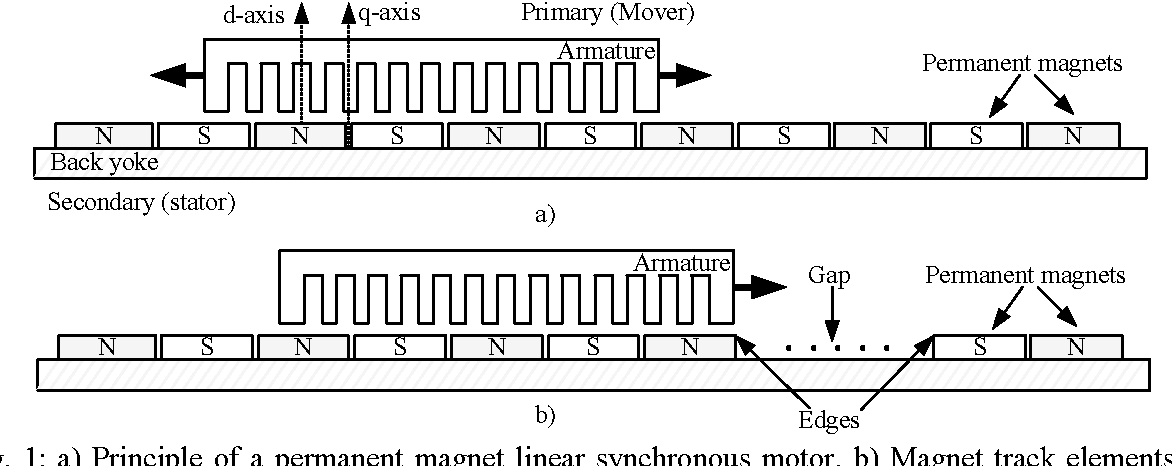 Линейные моторы имеют следующие преимущества: отсутствует износ; нулевой зазор; низкая частота пульсации. Линейные двигатели с металлическим сердечником широко применяются при автоматизации производства, в станкостроении, в полупроводниковой промышленности, в станках лазерной резки, в автоматизации производства печатных плат и во многих других отраслях промышленности.
Линейные моторы имеют следующие преимущества: отсутствует износ; нулевой зазор; низкая частота пульсации. Линейные двигатели с металлическим сердечником широко применяются при автоматизации производства, в станкостроении, в полупроводниковой промышленности, в станках лазерной резки, в автоматизации производства печатных плат и во многих других отраслях промышленности.
|
|
Линейные двигатели HIWIN серии LMS
|
|
Линейные двигатели HIWIN серии LMSA
|
| Руководство пользователя по монтажу PDF >>> |
Характеристики линейного двигателя серии LMS
| Обозначение | Единица измерения | LMS13 | LMS23 | LMS17 | LMS27 | LMS27L | LMS37 | LMS37L | LMS47 | LMS47L | LMS57 | LMS57L | LMS67 | LMS67L | |
| Постоянная сила (120°) | Fc | Н | 203 | 240 | 228 | 382 | 382 | 535 | 535 | 733 | 733 | 879 | 879 | 1069 | 1069 |
| Постоянный ток (120°) | lc | Аср | 4. 6 6 | 3.9 | 3.9 | 3.9 | 7.9 | 3.9 | 7.9 | 3.9 | 7.9 | 3.9 | 7.9 | 3.9 | 7.9 |
| Пиковая сила для 1 сек. | Fp | H | 406 | 480 | 456 | 764 | 764 | 1070 | 1070 | 1466 | 1466 | 1758 | 1758 | 2138 | 2138 |
| Пиковый ток для 1 сек. | lp | Aср | 13.8 | 11. 8 8 | 11.8 | 11.8 | 23.7 | 11.8 | 23.7 | 11.8 | 23.7 | 11.8 | 23.8 |
11.8
| 23.8 |
| Наивысшая сила для 0,5 сек. | Fu | Н | 540 | 639 | 609 | 1017 | 1017 | 1425 | 1425 | 1953 | 1953 | 2343 | 2343 | 2850 | 2850 |
| Наивысший ток для 0,5 сек. | lu | Aср | 24. 6 6 | 21.0 | 21.0 | 21.0 | 42.0 | 21.0 | 42.0 | 21.0 | 42.0 | 21.0 | 42.0 | 21.0 | 42.0 |
| Постоянная силы | Kf | Н/Аср | 44 | 61 | 58 | 97 | 46 | 136 | 68 | 186 | 93 | 223 | 112 | 271 | 136 |
| Сила притяжения | Fa | Н | 805 | 1350 | 1221 | 2036 | 2036 | 2850 | 2850 | 4071 | 4071 | 4885 | 4885 | 5700 | 5700 |
Макс. температура обмотки температура обмотки | Tmax | °C | 120 | 120 | 120 | 120 | 120 | 120 | 120 | 120 | 120 | 120 | 120 | 120 | 120 |
| Электрическая постоянная времени | Ke | мс | 10.4 | 10.5 | 10.6 | 11.3 | 8.9 | 11.6 | 11.0 | 13.0 | 12.2 | 12.4 | 12.0 | 12.4 | 12.6 |
| Сопротивление (межфазное при 25°С) | R25 | Ω | 3. 1 1 | 4.6 | 4.8 | 6.8 | 1.6 | 8.9 | 2.1 | 11.9 | 2.7 | 13.8 | 3.1 | 15.4 | 3.4 |
| Сопротивление (межфазное при 120°С) | R120 | Ω | 4.1 | 6.1 | 6.3 | 9.0 | 2.1 | 11.7 | 2.8 | 15.7 | 3.6 | 18.2 | 4.1 | 20.3 | 4.5 |
| Индуктивность (межфазная) | L | мГн | 32.2 | 48.4 | 50.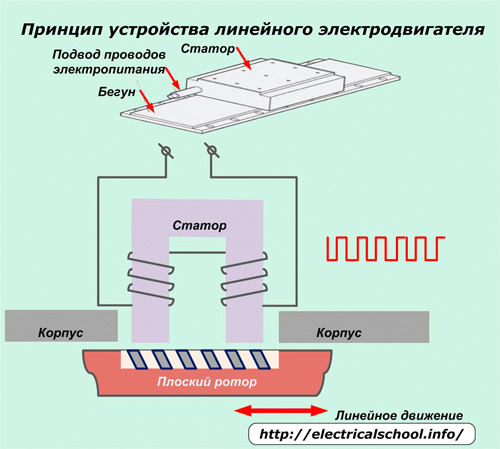 8 8 | 76.8 | 14 | 103.4 | 23.1 | 154.4 | 33 | 170.8 | 37.3 | 190.7 | 43 |
| Шаг полюсной пары | 2т | мм | 32 | ||||||||||||
| Критический радиус изгиба кабеля двигателя (LAPP 796CP_4×1.5G) | Rbend | мм | 45(500В)/69(600В) | ||||||||||||
| Коэффициент противоЭДС | Kw | Вср/(м/сек.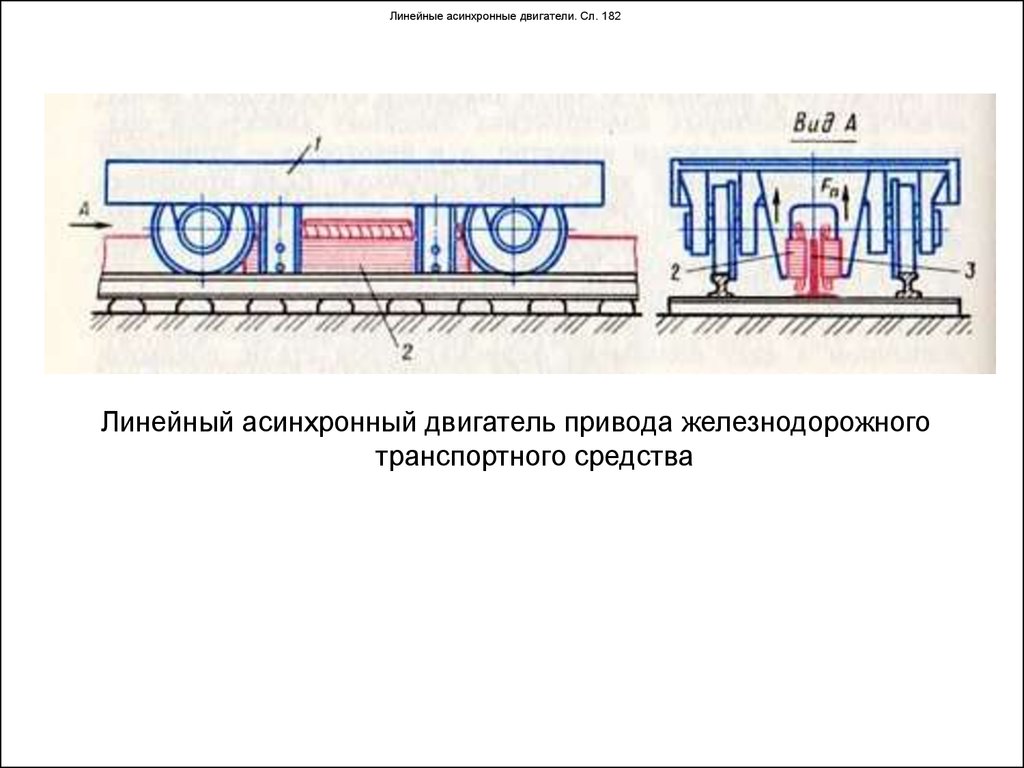 ) ) | 26 | 43 | 31 | 51 | 24 | 71 | 36 | 101 | 51 | 121 | 61 | 141 | 71 |
| Постоянная электродвигателя | Km | Нм/√Вт | 20,4 | 23,2 | 21,6 | 30,4 | 31,4 | 37,2 | 38,3 | 44,0 | 46,2 | 49,0 | 51,6 | 56,4 | 60,2 |
| Термостойкость (при 25°С) | Rth | °С/Вт | 0,7 | 0,7 | 0,6 | 0,5 | 0,5 | 0,3 | 0,4 | 0,3 | 0,3 | 0,2 | 0,2 | 0,2 | 0,2 |
| Датчик температуры | 3 PTC SNM120 | ||||||||||||||
Макс.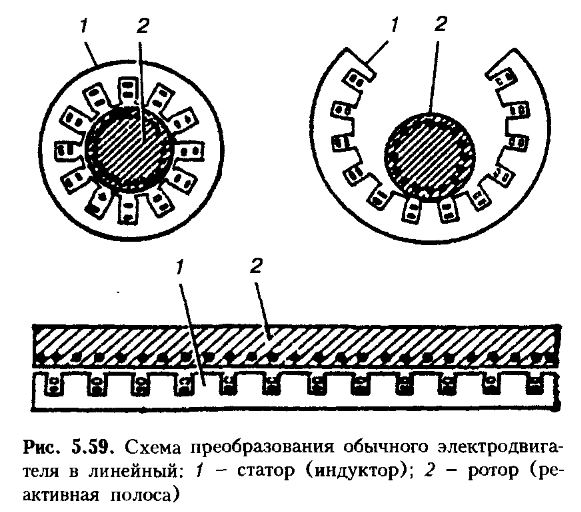 пост. напряжение пост. напряжение | В | 500/600 | |||||||||||||
| Масса генератора усилий | Mf | кг | 1.8 | 2.7 | 2.7 | 4.1 | 4.1 | 5.9 | 5.9 | 8 | 8 | 9.4 | 9.4 | 10.8 | 10.8 |
| Единичная масса статора | Ms | кг/м | 4.2 | 6.2 | 4.2 | 6.2 | 6.2 | 8.2 | 8.2 | 11.5 | 11.5 | 13. 7 7 | 13.7 | 15.9 | 15.9 |
| Ширина статора | Ws | мм | 60 | 80 | 60 | 80 | 80 | 80 | 100 | 100 | 130 | 130 | 150 | 170 | 170 |
| Длина статора/Размер N | Ls | мм | 128 мм/N=1, 192 мм/N=2, 320мм/N=4 | ||||||||||||
| Крепежный размер статора | Ws1 | мм | 45 | 65 | 45 | 65 | 65 | 85 | 85 | 115 | 115 | 135 | 135 | 155 | 155 |
| Габаритная высота | H | мм | 55,2 | 55,2 | 57,4 | 57,4 | 57,4 | 57,4 | 57,4 | 57,4 | 57,4 | 57,4 | 57,4 | 57,4 | 57,4 |
Характеристики линейного двигателя серии LMSA
| Обозначение | Единица измерения | LMSA11 | LMSAL | LMSA12 | LMSA12L | LMSA13 | LMSA13L | LMSA21 | LMSA21L | LMSA23 | LMSA23L | LMSA23L | LMSA23L | LMSA31 | LMSA31L | LMSA32 | LMSA32L | LMSA33 | LMSA33L | |
| Постоянная сила (120°) | Fc | Н | 103 | 103 | 205 | 205 | 308 | 308 | 181 | 181 | 362 | 362 | 544 | 544 | 292 | 292 | 583 | 583 | 875 | 875 |
| Постоянный ток (120°) | lc | Аср | 2. 1 1 | 4.7 | 4.2 | 9.4 | 6.3 | 14.1 | 2.0 | 4.4 | 3.9 | 8.8 | 5.9 | 13.1 | 2.0 | 4.5 | 4.0 | 8.9 | 6.0 | 13.4 |
| Пиковая сила для 1 сек. | Fp | H | 289 | 289 | 589 | 579 | 868 | 868 | 512 | 512 | 1023 | 1023 | 1535 | 1535 | 823 | 823 | 1646 | 1646 | 2469 | 2469 |
Пиковый ток для 1 сек. | lp | Aср | 6.3 | 14.1 | 12.7 | 28.3 | 19.0 | 42.4 | 5.9 | 13.1 | 11.8 | 26.3 | 17.6 | 39.4 | 6.0 | 13.4 | 12.0 | 26.8 | 18.0 | 40.2 |
| Постоянная силы | Kf | Н/Аср | 48.6 | 21.7 | 48.6 | 21. 7 7 | 48.6 | 21.7 | 92.5 | 41.4 | 92.5 | 41.4 | 92.5 | 41.4 | 145.8 | 65.2 | 145.8 | 65.2 | 145.8 | 65.2 |
| Сила притяжения | Fa | Н | 770 | 770 | 1540 | 1540 | 2310 | 2310 | 1288 | 1288 | 2576 | 2576 | 3864 | 3864 | 2120 | 2120 | 4240 | 4240 | 6360 | 6360 |
Макс. температура обмотки температура обмотки | Tmax | °C | 120 | |||||||||||||||||
| Электрическая постоянная времени | Ke | мс | 4.4 | 4.3 | 4.5 | 4.1 | 4.4 | 4.0 | 4.6 | 4.6 | 4.9 | 4.6 | 4.9 | 4.8 | 4.9 | 4.9 | 4.9 | 4.9 | 4.9 | 5.0 |
| Сопротивление (межфазное при 25°С) | R25 | Ω | 8. 4 4 | 1.7 | 4.1 | 0.9 | 2.8 | 0..6 | 13.8 | 2.8 | 6.8 | 1.4 | 4.6 | 0.9 | 19.2 | 4.0 | 9.6 | 2.0 | 6.4 | 1.3 |
| Сопротивление (межфазное при 120°С) | R120 | Ω | 11.6 | 2.3 | 5.7 | 1.2 | 3.9 | 0.8 | 19.0 | 3.9 | 9.4 | 1.6 | 6.3 | 1.2 | 26.5 | 5.5 | 13.2 | 2. 8 8 | 8.8 | 1.8 |
| Индуктивность (межфазная) | L | мГн | 37.1 | 7.3 | 18.5 | 3.7 | 12.4 | 2.4 | 64 | 12.8 | 33.0 | 6.4 | 22.4 | 4.3 | 94.1 | 19.6 | 47.1 | 9.8 | 31.3 | 6.5 |
| Шаг полюсной пары | 2т | мм | 30 | |||||||||||||||||
Критический радиус изгиба кабеля двигателя (LAPP 796CP_4×1. 5G) 5G) | Rbend | мм | 69 | |||||||||||||||||
| Коэффициент противоЭДС | Kw | Вср/(м/сек.) | 28.1 | 12.6 | 28.1 | 12.6 | 28.1 | 12.6 | 53.4 | 23.9 | 53.4 | 23.9 | 53.9 | 23.9 | 84.2 | 37.7 | 84.2 | 37.7 | 84.2 | 37.7 |
| Постоянная электродвигателя | Km | Нм/√Вт | 13.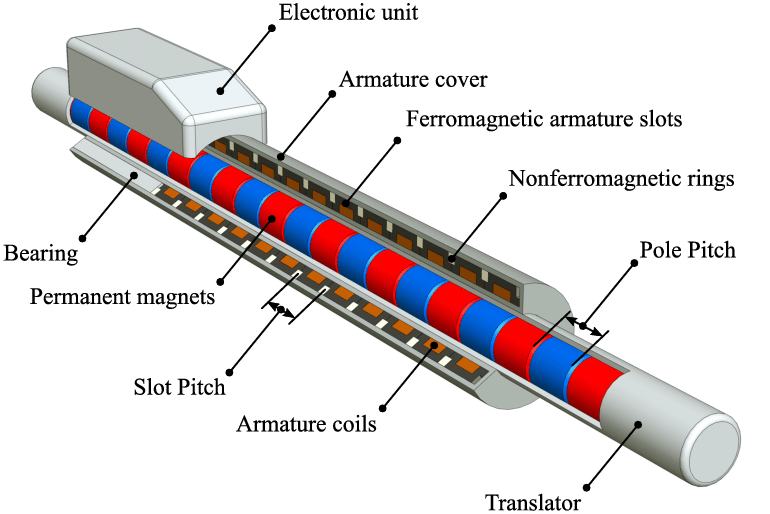 7 7 | 13.6 | 19.6 | 18.7 | 23.7 | 22.9 | 20.3 | 20.2 | 28.9 | 28.6 | 35.2 | 35.6 | 27.2 | 26.6 | 38.4 | 37.7 | 47.0 | 46.7 |
| Термостойкость (при 25°С) | Rth | °С/Вт | 1.23 | 1.23 | 0.63 | 0.63 | 0.41 | 0.41 | 0.87 | 0.87 | 0.44 | 0.44 | 0.29 | 0.29 | 0.60 | 0.60 | 0. 30 | 0.30 | 0.20 | 0.20 |
| Датчик температуры | 3 PTC SNM 120 | |||||||||||||||||||
| Макс. пост. напряжение | В | 600 | ||||||||||||||||||
| Масса генератора усилий | Mf | кг | 0.7 | 0.7 | 1.4 | 1.4 | 2. 1 | 2.1 | 1.1 | 1.1 | 2.2 | 2.2 | 3.3 | 3.3 | 1.9 | 1.9 | 3.8 | 3.8 | 5.7 | 5.7 |
| Единичная масса статора | Ms | кг/м | 2.7 | 2.7 | 2.7 | 2.7 | 2.7 | 2.7 | 4.8 | 4.8 | 4.8 | 4.8 | 4.8 | 4.8 | 8.5 | 8.5 | 8.5 | 8.5 | 8.5 | 8. 5 |
| Ширина статора | Ws | мм | 52 | 52 | 52 | 52 | 52 | 52 | 86 | 86 | 86 | 86 | 86 | 86 | 116 | 116 | 116 | 116 | 116 | 116 |
| Длина статора/Размер N | Ls | мм | 120 мм/N=2, 180 мм/N=3, 300 мм/N=5 | |||||||||||||||||
| Крепежный размер статора | Ws1 | мм | 42 | 42 | 42 | 42 | 42 | 42 | 74 | 74 | 74 | 74 | 74 | 74 | 104 | 104 | 104 | 104 | 104 | 104 |
| Габаритная высота | H | мм | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 36 | 36 | 36 | 36 | 36 | 36 |
Подробные характеристики в формате PDF
| Линейные двигатели HIWIN серии LMS | Линейные двигатели HIWIN серии LMSA | ||
| LMS13 | LMS17 | LMSA11 | LMSA11L |
| LMS23 | LMS27 | LMSA12 | LMSA12L |
| LMS27L | LMS37 | LMSA13 | LMSA13L |
| LMS37L | LMS47 | LMSA21 | LMSA21L |
| LMS47L | LMS57 | LMSA22 | LMSA22L |
| LMS57L | LMS67 | LMSA23 | LMSA23L |
| LMS67L | LMSA31 | LMSA31L | |
| LMSA32 | LMSA32L | ||
| LMSA33 | LMSA33L | ||
Информация для заказа линейных двигателей HIWIN серии LMSA, обмоточная часть
| LM | SA | 1 | 1 |
| Модель | Тип | Ширина обмоточной части | Длина обмоточной части |
| LM: линейный двигатель | SA: тип линейного двигателя | 1: 56 мм | 1: 118 мм |
| 2: 86 мм | 2: 223 мм | ||
| 3: 116 мм | 3: 328 мм |
Информация для заказа линейных двигателей HIWIN серии LMSA, магнитная часть
| LM | SA | 1 | S | 1 | E |
| Модель | Тип | Ширина магнитной части | Модель магнитной части | Длина магнитной части | Покрытие магнитов |
| LM: линейный двигатель | SA: тип линейного двигателя | 1: 56 мм | S: Стандарт | 1: 118 мм | E: эпоксидное покрытие |
| 2: 86 мм | С: По заказу клиента | 2: 223 мм | Нет: нержавеющая плита | ||
| 3: 116 мм | 3: 328 мм |
Синхронные линейные двигатели HIWIN серии LMF имеют водяное охлаждение обмоточной части спиральной формы. Двигатели отличаются высокой плотностью электромагнитного поля и минимальной пульсацией силы. Эти трехфазные линейные двигатели состоят из главной части (якоря или обмоточной части) с железным сердечником и вторичной части (статором) с постоянными магнитами. Благодаря возможности последовательной установки нескольких статоров длина хода в двигателе может быть неограниченно увеличена.
|
|
Линейные двигатели HIWIN серии LMF
|
|
|
Линейные двигатели HIWIN серии LMFA
|
| Руководство пользователя по монтажу PDF >>> |
Характеристики линейного двигателя серии LMF
| Обозначение | Единица измерения | LMF01 | LMF01L | LMF02 | LMF02L | LMF03 | LMF03L | LMF11 | LMF11L | LMF12 | LMF12L | LMF13 | LMF13L | LMF14 | LMF14L | LMF21 | LMF21L | LMF22 | LMF22L | LMF23 | LMF23L | LMF24 | LMF24L | |
| Постоянная сила | Fc | Н | 63 | 63 | 126 | 126 | 189 | 189 | 115 | 115 | 230 | 230 | 344 | 344 | 459 | 459 | 172 | 171 | 342 | 343 | 516 | 517 | 688 | 688 |
| Постоянный ток | lc | Аср | 1. 3 | 3.2 | 2.7 | 6.3 | 4.0 | 9.5 | 1.3 | 3.2 | 2.7 | 6.3 | 4.0 | 9.5 | 5.3 | 12.6 | 1.3 | 3.2 | 2.7 | 6.3 | 4.0 | 9.5 | 5.3 | 12.6 |
| Постоянная сила (водяное охлаждение) | Fc(wc) | Н | 126 | 126 | 253 | 253 | 379 | 379 | 230 | 230 | 459 | 459 | 687 | 688 | 917 | 917 | 344 | 343 | 683 | 686 | 1032 | 1033 | 1376 | 1376 |
| Постоянный ток (водяное охлаждение) | lc(wc) | Аср | 2. 7 | 6.3 | 5.3 | 12.6 | 8.0 | 18.9 | 2.7 | 6.3 | 5.3 | 12.7 | 8.0 | 19.0 | 10.7 | 25.3 | 2.7 | 6.3 | 5.3 | 12.6 | 8.0 | 19.0 | 10.7 | 25.3 |
| Пиковая сила для 1 сек. | Fp | H | 336 | 336 | 674 | 674 | 1010 | 1010 | 612 | 612 | 1224 | 1224 | 1834 | 1834 | 2446 | 2446 | 917 | 917 | 1834 | 1834 | 2753 | 2753 | 3670 | 3670 |
| Пиковый ток для 1 сек. | lp | Aср | 8.9 | 21.0 | 17.8 | 42.2 | 26. 7 | 63.2 | 8.9 | 21.1 | 17.8 | 42.2 | 26.7 | 63.2 | 35.6 | 84.3 | 8.9 | 21.0 | 17.7 | 42.0 | 26.7 | 63.3 | 35.6 | 84.3 |
| Постоянная силы | Kf | Н/Аср | 47.3 | 20.0 | 47.3 | 20. 0 | 47.3 | 20.0 | 85.8 | 36.3 | 85.8 | 36.3 | 85.8 | 36.3 | 85.8 | 36.3 | 128.7 | 54.4 | 128.7 | 54.4 | 128.7 | 54.4 | 128.7 | 54.4 |
| Сила притяжения | Fa | Н | 570 | 570 | 1140 | 1140 | 1710 | 1710 | 954 | 954 | 1909 | 1909 | 2863 | 2863 | 3818 | 3818 | 1431 | 1431 | 2863 | 2863 | 4294 | 4294 | 5727 | 5727 |
| Макс. температура обмотки | Tmax | °C | 120 | |||||||||||||||||||||
| Электрическая постоянная времени | Ke | мс | 4.3 | 3.3 | 4.4 | 3.1 | 4.3 | 3.3 | 4.9 | 4.8 | 4.9 | 4.6 | 4.8 | 4.6 | 4.9 | 4.7 | 5.0 | 4.8 | 5.2 | 5.0 | 5.1 | 4.8 | 5.3 | 5.0 |
| Сопротивление (межфазное при 25°С) | R25 | Ом | 9. 0 | 2.1 | 4.4 | 1.1 | 3.0 | 0.7 | 12.4 | 2.3 | 6.2 | 1.2 | 4.4 | 0.8 | 3.1 | 0.6 | 17.2 | 3.3 | 8.6 | 1.6 | 5.8 | 1.1 | 4.3 | 0.8 |
| Сопротивление (межфазное при 120°С) | R120 | Ом | 11.9 | 2.8 | 5.8 | 1.5 | 4.0 | 0.9 | 16.4 | 3.0 | 8. 2 | 1.6 | 5.8 | 1.1 | 4.1 | 0.8 | 22.7 | 4.4 | 11.3 | 2.1 | 7.6 | 1.5 | 5.7 | 1.1 |
| Индуктивность (межфазная) | L | мГн | 39.0 | 7.0 | 19.3 | 3.4 | 12.9 | 2.3 | 60.7 |
11.1
| 30.4 | 5.5 | 21.0 | 3.7 | 15.2 | 2.8 | 85. 6 | 16.0 | 44.3 | 8.0 | 29.7 | 5.3 | 22.6 | 4.0 |
| Шаг полюсной пары | 2т | мм | 30 | |||||||||||||||||||||
| Критический радиус изгиба кабеля двигателя | Rbend | мм | 108.8 | 108.8 | 108.8 | 108.8 | 108. 8 | 112.5 | 108.8 | 108.8 | 108.8 | 108.8 | 108.8 | 112.5 | 108.8 | 112.5 | 108.8 | 108.8 | 108.8 | 108.8 | 108.8 | 112.5 | 108.8 | 112.5 |
| Коэффициент противоЭДС | Kv | Вср/(м/сек.) | 27. 0 | 11.4 | 27.0 | 11.4 | 27.0 | 11.4 | 49.0 | 20.7 | 49.0 | 20.7 | 49.0 | 20.7 | 49.0 | 20.7 | 73.5 | 31.1 | 73.5 | 31.1 | 73.5 | 31.1 | 73.5 | 31.1 |
| Постоянная электродвигателя (при 25°С) | Km | Нм/√Вт | 12.9 | 11.3 | 18.4 | 15.6 | 22.3 | 19. 5 | 19.9 | 19.5 | 28.1 | 27.0 | 33.4 | 33.1 | 39.8 | 38.2 | 25.3 | 24.5 | 35.8 | 35.1 | 43.6 | 42.4 | 50.7 | 49.7 |
| Термостойкость | Rth | °С/Вт | 3.01 | 2.30 | 1.53 | 1.09 | 1.00 | 0.76 | 2.17 | 2.09 | 1.08 | 1.00 | 0.68 | 0.67 | 0.54 | 0. 50 | 1.57 | 1.47 | 0.79 | 0.76 | 0.51 | 0.48 | 0.39 | 0.38 |
| Термостойкость (водяное охлаждение) | Rth(wc) | °С/Вт | 0.75 | 0.58 | 0.38 | 0.27 | 0.25 | 0.19 | 0.54 | 0. 52 | 0.27 | 0.25 | 0.17 | 0.17 | 0.14 | 0.13 | 0.39 | 0.37 | 0.20 | 0.19 | 0.13 | 0.12 | 0.10 | 0.09 |
| Минимальный расход водяного охлаждения | — | л/мин. | 3.3 | 3.7 | 4. 0 | |||||||||||||||||||
| Температура водяного охлаждения | — | °С | 20 | |||||||||||||||||||||
| Датчик температуры | — | KTY84-130 + 3 PTC SNM120 | ||||||||||||||||||||||
| Макс. пост. напряжение | — | В | 750 | |||||||||||||||||||||
| Масса генератора усилий | Mf | кг | 1. 5 | 1.5 | 2.3 | 2.3 | 3.1 | 3.1 | 2.4 | 2.4 | 4 | 4 | 5.6 | 5.6 | 7.6 | 7.6 | 3.2 | 3.2 | 5.5 | 5.5 | 8 | 8 | 10.4 | 10.4 |
| Единичная масса статора | Ms | кг/м | 3.7 | 5.8 | 9.8 | |||||||||||||||||||
| Ширина статора | Ws | мм | 58 | 88 | 118 | |||||||||||||||||||
| Длина статора/Размер N | Ls | мм | 120 мм/N=2, 180 мм/N=3, 300 мм/N=5 | |||||||||||||||||||||
| Крепежный размер статора | Ws1 | мм | 48 | 74 | 104 | |||||||||||||||||||
| Габаритная высота | H | мм | 48. 5 | 50.5 | ||||||||||||||||||||
Характеристики линейного двигателя серии LMFA
| Обозначение | Единица измерения | LMFA31 | LMFA31L | LMFA32 | LMFA32L | LMFA33 | LMFA33L | LMFA34 | LMFA34L | LMFA41 | LMFA41L | LMFA42 | LMFA42L | LMFA43 | LMFA43L | LMFA44 | LMFA44L | LMFA52 | LMFA52L | LMFA53 | LMFA53L | LMFA54 | LMFA54L | LMFA62 | LMFA62L | LMFA63 | LMFA63L | LMFA64 | LMFA64L | |
| Постоянная сила | Fc | Н | 380 | 380 | 759 | 759 | 1139 | 1139 | 1519 | 1519 | 495 | 495 | 990 | 990 | 1484 | 1484 | 1979 | 1979 | 1422 | 1422 | 2133 | 2133 | 2844 | 2844 | 1979 | 1979 | 2969 | 2969 | 3958 | 3958 |
| Постоянный ток | lc | Аср | 3. 1 | 4.6 | 6.2 | 9.1 | 9.3 | 13.7 | 12.4 | 18.3 | 2.9 | 4.3 | 5.8 | 8.5 | 8.7 | 12.8 | 11.5 | 17.0 | 6.2 | 9.1 | 9.3 | 13.7 | 12.4 | 18.3 | 5.8 | 11.5 | 8.7 | 17.3 | 11.5 | 23.1 |
| Постоянная сила (водяное охлаждение) | Fc(wc) | Н | 759 | 759 | 1519 | 1519 | 2278 | 2278 | 3037 | 3037 | 990 | 990 | 1979 | 1979 | 2969 | 2969 | 3958 | 3958 | 2844 | 2844 | 4266 | 4266 | 5688 | 5688 | 3958 | 3958 | 5938 | 5938 | 7917 | 7917 |
| Постоянный ток (водяное охлаждение) | lc(wc) | Аср | 6. 2 | 9.1 | 12.4 | 18.3 | 18.6 | 27.4 | 24.7 | 36.5 | 5.8 | 8.5 | 11.5 | 17.0 | 17.3 | 25.6 | 23.1 | 34.1 | 12.4 | 18.3 | 18.6 | 27.4 | 24.7 | 36.5 | 11.5 | 23.1 | 17. 3 | 34.6 | 23.1 | 46.2 |
| Пиковая сила для 1 сек. | Fp | H | 1750 | 1750 | 3500 | 3500 | 5250 | 5250 | 7000 | 7000 | 2603 | 2603 | 5207 | 5207 | 7810 | 7810 | 10413 | 10413 | 6925 | 6925 | 10388 | 10388 | 13850 | 13850 | 10413 | 10413 | 15620 | 15620 | 20827 | 20827 |
| Пиковый ток для 1 сек. | lp | Aср | 19.2 | 28.3 | 38.4 | 56.6 | 57.5 | 84.9 | 76.7 | 113.3 | 17.9 | 26.4 | 35.8 | 52.9 | 53.5 | 79.3 | 71.6 | 105.7 | 38.4 | 56.6 | 57.5 | 84.9 | 76.7 | 113.2 | 35.8 | 71.6 | 53.7 | 107.4 | 71.3 | 142.6 |
| Постоянная силы | Kf | Н/Аср | 122. 7 | 83.1 | 122.7 | 83.1 | 122.7 | 83.1 | 122.7 | 83.1 | 171.4 | 116.1 | 171.4 | 116.1 | 171.4 | 116.1 | 171.4 | 116.1 | 229.9 | 155.7 | 229.9 | 155.7 | 229.9 | 155.7 | 342.7 | 171. 4 | 342.7 | 171.4 | 342.7 | 171.4 |
| Сила притяжения | Fa | Н | 3430 | 3430 | 6860 | 6860 | 10290 | 10290 | 13720 | 13720 | 5145 | 5145 | 10290 | 10290 | 15435 | 15435 | 20580 | 20580 | 13700 | 13700 | 20550 | 20550 | 27400 | 27400 | 20580 | 20580 | 30870 | 30870 | 41160 | 41160 |
| Макс. температура обмотки | Tmax | °C | 120 | |||||||||||||||||||||||||||
| Электрическая постоянная времени | Ke | мс | 11.3 | 11.4 | 11.3 | 11.4 | 11.3 | 11.4 | 11.3 | 11.4 | 12.0 | 12.1 | 12.0 | 12.1 | 12.0 | 12.1 | 12.0 | 12.1 | 12.2 | 12.4 | 12.2 | 12.4 | 12.2 | 12.4 | 12. 0 | |||||
| Сопротивление (межфазное при 25°С) | R25 | Ом | 4.3 | 1.9 | 2.1 | 1.0 | 1.4 | 0.6 | 1.1 | 0.5 | 6.0 | 2.7 | 3.0 | 1.4 | 2.0 | 0.9 | 1.5 | 0.7 | 3.9 | 1.8 | 2.6 | 1.2 | 2.0 | 0.9 | 6.0 | 1.5 | 4.0 | 1. 0 | 3.0 | 0.8 |
| Сопротивление (межфазное при 120°С) | R120 | Ом | 5.6 | 2.6 | 2.8 | 1.3 | 1.9 | 0.9 | 1.4 | 0.6 | 7.9 | 3.6 | 4.0 | 1.8 | 2.6 | 1.2 | 2.0 | 0.9 | 5.1 | 2.3 | 3.4 | 1.6 | 2.6 | 1.2 | 7.9 | 2. 0 | 5.3 | 1.3 | 4.0 | 1.0 |
| Индуктивность (межфазная) | L | мГн | 48.3 | 22.2 | 24.2 | 11.1 | 16.1 | 7.4 | 12.1 | 5.5 | 72.0 | 33.0 | 36.0 | 16.5 | 24.0 | 11.0 | 18.0 | 8.3 | 47.7 | 21.9 | 31.8 | 14.6 | 23.9 | 10. 9 | 72.0 | 18.0 | 48.0 | 12.0 | 36.0 | 9.0 |
| Шаг полюсной пары | 2т | мм | 46 | |||||||||||||||||||||||||||
| Коэффициент противоЭДС | Kv | Вср/(м/сек.) | 70.9 | 48.0 | 70.9 | 48.0 | 70.9 | 48.0 | 70.9 | 48.0 | 98.9 | 67.0 | 98.9 | 67.0 | 98. 9 | 67.0 | 98.9 | 67.0 | 132.7 | 89.9 | 132.7 | 89.9 | 132.7 | 89.9 | 197.9 | 98.9 | 197.9 | 98.9 | 197.9 | 98.9 |
| Постоянная электродвигателя (при 25°С) | Km | Нм/√Вт | 48.4 | 48.7 | 68.5 | 68.9 | 83. 9 | 84.4 | 96.9 | 97.4 | 57.1 | 57.5 | 80.8 | 81.3 | 98.9 | 99.5 | 114.2 | 114.9 | 95.0 | 95.6 | 116.4 | 117.1 | 134.4 | 135.2 | 114.2 | 114.2 | 139.9 | 139.9 | 161.6 | 161.6 |
| Термостойкость | Rth | °С/Вт | 1. 17 | 1.19 | 0.59 | 0.59 | 0.39 | 0.40 | 0.29 | 0.30 | 0.96 | 0.97 | 0.48 | 0.49 | 0.32 | 0.32 | 0.24 | 0.24 | 0.32 | 0.33 | 0.21 | 0.22 | 0.16 | 0.16 | 0.24 | 0.24 | 0.16 | 0.16 | 0.12 | 0.12 |
| Термостойкость (водяное охлаждение) | Rth(wc) | °С/Вт | 0. 29 | 0.30 | 0.15 | 0.15 | 0.10 | 0.10 | 0.07 | 0.07 | 0.24 | 0.24 | 0.12 | 0.12 | 0.08 | 0.08 | 0.06 | 0.06 | 0.08 | 0.08 | 0.05 | 0.05 | 0.04 | 0.04 | 0.06 | 0.06 | 0. 04 | 0.04 | 0.03 | 0.03 |
| Минимальный расход водяного охлаждения | — | л/мин. | 4.0 | 5.2 | 5.7 | 6.2 | 5.2 | 5.7 | 6.2 | 6.3 | 6.8 | 7.3 | 6.8 | 7.3 | 7.8 | |||||||||||||||
| Температура водяного охлаждения | — | °С | 20 | |||||||||||||||||||||||||||
| Датчик температуры | — | KTY84-130 + 3 PTC SNM120 | ||||||||||||||||||||||||||||
| Макс. входн. мощность | Pelmax | Вт | 10255 | 13910 | 20509 | 27821 | 30764 | 41731 | 41019 | 55642 | 10598 | 14198 | 21197 | 28396 | 31691 | 42594 | 42393 | 56792 | 24645 | 32267 | 36967 | 48400 | 49290 | 64534 | 26878 | 42393 | 40316 | 63590 | 53478 | 84510 |
| Макс. кол-во выделяемого тепла | Qp,h,max | Вт | 324 | 320 | 648 | 641 | 972 | 961 | 1296 | 1281 | 396 | 391 | 792 | 782 | 1187 | 1173 | 1583 | 1565 | 1181 | 1167 | 1771 | 1751 | 2362 | 2334 | 1583 | 1583 | 2375 | 2375 | 3166 | 3166 |
| Сила торможения (водяное охлаждение) | F0 | Н | 531 | 531 | 1063 | 1063 | 1594 | 1594 | 2126 | 2126 | 693 | 693 | 1385 | 1385 | 2078 | 2078 | 2771 | 2771 | 1991 | 1991 | 2986 | 2986 | 3982 | 3982 | 2771 | 2771 | 4156 | 4156 | 5542 | 5542 |
| Ток торможения (водяное охлаждение) | I0 | Аср | 4. 3 | 6.4 | 8.7 | 12.8 | 13.0 | 19.2 | 17.3 | 25.6 | 4.0 | 6.0 | 8.1 | 11.9 | 12.1 | 17.9 | 16.2 | 23.9 | 8.7 | 12.8 | 13.0 | 19.2 | 17.3 | 25.6 | 8.1 | 16.2 | 12. 1 | 24.3 | 16.2 | 32.3 |
| Макс. пост. напряжение | — | В | 750 | |||||||||||||||||||||||||||
| Масса генератора усилий | Mf | кг | 6.4 | 6.4 | 11.7 | 11.7 | 17.3 | 17.3 | 22.5 | 22.5 | 9.5 | 9.5 | 16.2 | 16.2 | 23 | 23 | 29 | 29 | 23. 8 | 23.8 | 32.3 | 32.3 | 40.8 | 40.8 | 32.2 | 32.2 | 44.2 | 44.2 | 56.2 | 56.2 |
| Единичная масса статора | Ms | кг/м | 16.2 | 22.3 | 25 | 40.1 | ||||||||||||||||||||||||
| Ширина статора | Ws | мм | 134 | 180 | 240 | 334 | ||||||||||||||||||||||||
| Длина статора/Размер N | Ls | мм | 184 мм/N=2, 276 мм/N=3, 460 мм/N=5 | |||||||||||||||||||||||||||
| Крепежный размер статора | Ws1 | мм | 115 | 161 | 222 | 316 | ||||||||||||||||||||||||
| Габаритная высота | H | мм | 64. 1 | 66.1 | 64.1 | 66.1 | ||||||||||||||||||||||||
Подробные характеристики в формате PDF
| Линейные двигатели HIWIN серии LMF | Линейные двигатели HIWIN серии LMFA | ||||||
| LMF01 | LMF01L | LMF33 | LMF33L | LMFA31 | LMF31L | LMF44 | LMFA44L |
| LMF02 | LMF02L | LMF34 | LMF34L | LMFA32 | LMF32L | LMF52 | LMFA52L |
| LMF03 | LMF03L | LMF41 | LMF41L | LMFA33 | LMF33L | LMF53 | LMFA53L |
| LMF11 | LMF11L | LMF42 | LMF42L | LMFA34 | LMF34L | LMF54 | LMFA54L |
| LMF12 | LMF12L | LMF43 | LMF43L | LMFA41 | LMF41L | LMF62 | LMFA62L |
| LMF13 | LMF13L | LMF44 | LMF44L | LMFA42 | LMF42L | LMF63 | LMFA63L |
| LMF14 | LMF14L | LMF52 | LMF52L | LMFA43 | LMF43L | ||
| LMF21 | LMF21L | LMF53 | LMF53L | ||||
| LMF22 | LMF22L | LMF54 | LMF54L | ||||
| LMF23 | LMF23L | LMF62 | LMF62L | ||||
| LMF24 | LMF24L | LMF63 | LMF63L | ||||
| LMF31 | LMF31L | LMF64 | LMF64L | ||||
| LMF32 | LMF32L | ||||||
Информация для заказа линейных двигателей HIWIN серии LMFA, обмоточная часть
| LM | SA | 3 | 1 |
| Модель | Тип | Ширина обмоточной части | Длина обмоточной части |
| LM: линейный двигатель | FA: тип линейного двигателя | 3: 141 мм | 1: 214 мм |
| 4: 188 мм | 2: 375 мм | ||
| 5: 248 мм | 3: 536 мм | ||
| 6: 342 мм | 4: 697 мм |
Информация для заказа линейных двигателей HIWIN серии LMFA, магнитная часть
| LM | FA | 3 | S | 1 | E |
| Модель | Тип | Ширина магнитной части | Модель магнитной части | Длина магнитной части | Покрытие магнитов |
| LM: линейный двигатель | FA: тип линейного двигателя | 3: 134 мм | S: Стандарт | 1: 118 мм | E: эпоксидное покрытие |
| 4: 180 мм | С: По заказу клиента | 2: 276 мм | Нет: нержавеющая плита | ||
| 5: 240 мм | 3: 460 мм | ||||
| 6: 334 мм |
Синхронные линейные двигатели HIWIN серии LMSC c металлическим сердечником имеют аналогичные свойства с линейными двигателями серии LMSЛинейные двигатели серии LMS. Благодаря особому расположению обмоточной части двигателя (якоря) между двумя магнитными частями (статорами) сила притяжения между обмоточной и магнитной частью компенсируется. В результате чего уменьшается нагрузка на направляющие в готовых решениях — линейных столахКоординатные столы HIWIN.
|
|
Линейные двигатели HIWIN серии LMSC
|
Характеристики линейного двигателя серии LMSC
| Обозначение | Единица измерения | LMSC7 | LMSC7(WC) | LMSC7L | LMSC7L(WC) | |
| Постоянная сила (120°) | Fc | Н | 1070 | 1819 | 1070 | 1819 |
| Постоянный ток (120°) | lc | Аср | 3. 9 | 6.7 | 7.9 | 13.4 |
| Пиковая сила для 1 сек. | Fp | H | 2140 | |||
| Пиковый ток для 1 сек. | lp | Aср | 11.8 | 23.7 | ||
| Постоянная силы | Kf | Н/Аср | 271 | 136 | ||
| Сила притяжения | Fa | Н | 0 | |||
| Макс. температура обмотки | Tmax | °C | 120 | |||
| Электрическая постоянная времени | Ke | мс | 10.5 | 10.0 | ||
| Сопротивление (межфазное при 25°С) | R25 | Ом | 17.8 | 4.2 | ||
| Сопротивление (межфазное при 120°С) | R120 | Ом | 23. 5 | 5.5 | ||
| Индуктивность (межфазная) | L | мГн | 206.8 | 46.2 | ||
| Шаг полюсной пары | 2т | мм | 32 | |||
| Критический радиус изгиба кабеля двигателя | Rbend | мм | 45 (500 В) / 69 (600 В) | |||
| Коэффициент противоЭДС | Kv | Вср/(м/сек. ) | 141 | 71 | ||
| Постоянная электродвигателя (при 25°С) | Km | Нм/√Вт | 52.4 | 54.2 | ||
| Термостойкость | Rth | °С/Вт | 0.17 | 0.06 | 0.18 | 0.06 |
| Датчик температуры | — | 3 PTC SNM120 | ||||
| Макс. пост. напряжение | — | В | 500/600 | |||
| Масса генератора усилий | Mf | кг | 14 | |||
| Единичная масса статора | Ms | кг/м | 16.4 | |||
| Ширина статора | Ws | мм | 100 | |||
| Длина статора/Размер N | Ls | мм | 128 мм/N=1, 192 мм/N=2, 320 мм/N=4 | |||
| Крепежный размер статора | Ws1 | мм | 85 | |||
| Габаритная высота | H | мм | 131. 5 | |||
Синхронные линейные двигатели HIWIN серии LMC предназначены для использования на ограниченных длинах хода. Двигатели легкие и динамичные. Это связано с применением в них облегченных катушек в обмоточной части (первичной части). Вторичная часть состоит из П-образного статора из постоянных магнитов. Двигатели не имеют люфта, в них отсутствует пульсация силы и снижена к минимуму пульсация скорости. В линейных двигателях серии LMC отсутствуют силы притяжения из-за конструкции обмоточной части, не имеющей металлического сердечника. Двигатели LMC используются в оборудовании для производства полупроводников и ЖК-дисплеев, в автоматическом оптическом контроле, в станках с ЧПУ.
|
|
• Максимальная скорость — 5 м/с
|
| Открыть руководство пользователя по монтажу (PDF)>>> |
|
Серия LMCA
| Подробнее>>> | |
|
Серия LMCB
| Подробнее>>> | |
|
Серия LMCC
| Подробнее>>> | |
|
Серия LMCD
| Подробнее>>> | |
|
Серия LMCE
| Подробнее>>> | |
|
Серия LMCF
| Подробнее>>> | |
|
Серия LMC-EFC
| Подробнее>>> | |
|
Серия LMC-EFE
| Подробнее>>> | |
|
Серия LMC-EFF
| Подробнее>>> |
Синхронные линейные двигатели HIWIN серии LMT c магнитной частью в види цилиндрического вала заменяют механизм шарико-винтовой пары, при этом обеспечивают более высокую скорость и точность. Магнитный вал легко устанавливается, т.к. не учитывается зазор, имеет нулевую зубцовую пульсацию силы и высокую пульсацию скорости. Двигатель LMT разработан для невысоких полезных нагрузок и движением по продолжительной кривой с высокой скорость. Линейные двигатели с цмлиндрической магнитной частью применяются в 3D-принтерах, в производстве полупроводников и ЖК-дисплеев, мобильных телефонов, сенсорных панелей, в оптических системах контроля, в ЧПУ станках.
|
|
• Максимальная скорость — 5 м/с
|
| Открыть руководство пользователя по монтажу (PDF)>>> |
|
Серия LMT8
| Подробнее>>> | |
|
Серия LMT2
| Подробнее>>> | |
|
Серия LMT6
| Подробнее>>> | |
|
Серия LMTA
| Подробнее>>> | |
|
Серия LMTB
| Подробнее>>> | |
|
Серия LMTC
| Подробнее>>> | |
|
Серия LMTD
| Подробнее>>> | |
|
Серия LMTE
| Подробнее>>> |
| Общий каталог по линейным двигателям HIWIN (ENG) | |
| Руководство пользователя для линейных двигателей HIWIN серий LMS/LMSA/LMF/LMFA (ENG) | |
| Руководство пользователя для линейных двигателей HIWIN серий LMC (ENG) | |
| Руководство пользователя для линейных двигателей HIWIN серий LMT (ENG) | |
| Руководство пользователя для сервопривода D1 (ENG) | |
| Программа «Lightening» настройки сервопривода HIWIN серии D1 (ENG) |
Назначение принцип действия линейные двигатели
Линейный двигатель
Лине́йный дви́гатель
— электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например:
Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором
, или
первичным элементом
, а часть двигателя, получающую энергию от статора, называют
вторичным элементом
или якорем (название «ротор» к деталям линейного двигателя не применяется, так как слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет).
Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Передачи винт-гайка с бесколлекторными микро мотор-редукторами Faulhaber
Микро мотор-редукторы с винтовым штоком, диаметр корпуса 3 или 6 мм, продолжительная осевая нагрузка – до 41,2 Н, кратковременная осевая нагрузка – до 61,8 Н, скорость линейного перемещения – до 150 мм/мин
Ссылка на подробное описание передач винт-гайка с микро мотор-редукторамиFaulhaber:
Малогабаритные передачи винт-гайка с бесколлекторными микродвигателями Faulhaber
Ознакомиться с описанием всей продукции компании Faulhaber можно по данной ссылке.
Синхронный линейный двигатель
Основной областью применения синхронных двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающим 96%. Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Принципы
п s знак равно 2 ж s / п = 2f_ / p>
где f
s
— частота питающей сети в Гц,
p
— число полюсов, а
ns
— синхронная скорость магнитного поля в оборотах в секунду.
Картина бегущего поля имеет скорость:
v s знак равно 2 т ж s = 2tf_ >
где v
s
— скорость линейного бегущего поля в м / с, а
t
— шаг полюсов.
скорость вторичной обмотки линейного двигателя определяется выражением
v р знак равно ( 1 — s ) v s = (1-s) v_ >
Привод, создаваемый линейными асинхронными двигателями, чем-то похож на обычные асинхронные двигатели; движущие силы демонстрируют примерно аналогичную характеристическую форму относительно скольжения, хотя и модулируемую концевыми эффектами.
Существуют уравнения для расчета тяги двигателя.
Конечный эффект
В отличие от асинхронного двигателя круглого сечения, линейный асинхронный двигатель демонстрирует «конечные эффекты». Эти конечные эффекты включают потери производительности и эффективности, которые, как полагают, вызваны уносом магнитной энергии и потерями в конце первичной обмотки из-за относительного движения первичной и вторичной обмоток.
Линейные двигатели нового поколения
Приводы подач всех современных металлообрабатывающих станков с ЧПУ, в том числе и электроэрозионных (ЭЭ) строятся по традиционной схеме. Так, в одном из типажей ЭЭ станков перемещения рабочего органа РО (каретки подач) осуществляется от двигателя постоянного тока через ременную передачу на ходовой винт. Через шариковую гайку (она скреплена с РО пружинами механизма защиты от соударений) вращение винта трансформируется в продольное перемещение РО.
Ременный привод станков
Более надежные и современные приводы выполнены без ременной передачи. В этих приводах высокомоментный двигатель переменного тока непосредственно соединен с ходовым винтом.
Непосредственный привод
Недостатки указанных видов приводов достаточно известны и очевидны:
Поскольку эти недостатки определяют основные качественные характеристики приводов (точность и равномерность хода РО, величину мертвого хода при реверсе, допустимые ускорения и скорости РО), конструкторская мысль станкостроителей давно пытается как-то уменьшить их влияние на работу приводов и оборудования в целом. Например, в соединении ходового винта с гайкой для уменьшения трения уже давно используют дорогое и сложное шариковинтовое соединение; для ликвидации зазоров в соединение винта с гайкой вводятся специальные устройства натяга соединения; ходовые винты особо точных станков изготавливают по классу эталонных; погрешности шага винтов пытаются скомпенсировать системами компенсаторов; в борьбе с температурными деформациями создаются изощрённые системы охлаждения и т. д. Проблемы, проблемы, проблемы. И уже давно ясно, что проблемы приводов с ходовыми винтами не решить никогда из-за их физико-технической сущности и построенного типа, как такового.
Электромагнитная система Линейный электродвигатель
Потребовались многие годы работы ученых и конструкторов в разных странах, прежде чем был достигнут успех. Особенно интенсивно велись работы в Японии, где электромагнитный привод (уже как линейный привод) был впервые успешно использован как движитель для сверхскоростных поездов. Там же были попытки создания линейных приводов для металлообрабатывающих станков, но они имели существенные недостатки: создавали сильные магнитные поля, грелись, а главное не обеспечивали равномерности в движении РО. Лишь на пороге нового тысячелетия начался серийный выпуск станков (пока в основном электроискровых (электроэрозионных)) с принципиально новыми линейными двигателями, в которых решены все проблемы по обеспечению равномерным движением РО станков со сверхвысокой точностью, с большим диапазоном регулирования скорости, с громадными ускорениями, мгновенным реверсом, с простотой обслуживания и наладки и др.
Точная и равномерная подача РО во всем диапазоне скоростей и нагрузок обеспечивается двумя техническими решениями:
организовала на своих заводах серийный выпуск широкой гаммы ЛД с характеристиками: с ходом подач от 100 до 2220 мм, с максимальной скоростью перемещения РО до 180 м/мин с ускорениями до 20G (. ) при точности исполнения заданных перемещений (в нормальном режиме работ) равной 0,0001мм (0,1 мкм). Нагрев этих ЛД при работе не превышает + 2° С от температуры помещения. Обеспечивается практически мгновенная остановка РО, реверс, моментальная реакция привода на команды системы ЧПУ и т.д. На один и тот же рабочий орган монтируется (например, для увеличения мощности) несколько линейных двигателей. Так, в частности, устроен привод оси Z всех ЭЭ прошивочных станков «СОДИК».
Использует
Также существуют двухосные линейные двигатели. Эти специализированные устройства использовались для обеспечения прямого движения по оси X
— Y
для точной лазерной резки ткани и листового металла, автоматизированного черчения и формирования кабеля. Кроме того, линейные асинхронные двигатели с цилиндрической вторичной обмоткой использовались для обеспечения одновременного линейного и вращательного движения для монтажа электронных устройств на печатных платах.
Большинство используемых линейных двигателей — это LIM (линейные асинхронные двигатели) или LSM (линейные синхронные двигатели). Линейные двигатели постоянного тока не используются, так как они дороже, а линейный SRM имеет низкую тягу. Таким образом, для длительных пробегов на тяговых усилиях предпочтительнее использовать LIM, а для краткосрочных — LSM.
Линейные асинхронные двигатели также использовались для запуска самолетов, система Westinghouse Electropult в 1945 году была ранним примером, а электромагнитная система запуска самолетов (EMALS) должна была быть поставлена в 2010 году.
Линейные асинхронные двигатели также используются в ткацких станках, магнитная левитация позволяет бобинам плавать между волокнами без прямого контакта.
Первый безканатный лифт, изобретенный ThyssenKrupp, использует линейный индукционный привод.
Источник
Линейные электродвигатели. Основные разновидности и их применение
Назначение и типы линейных электродвигателей
Ротационные электродвигатели обычно предназначены для реализации вращательного движения рабочего механизма. Иногда эти двигатели осуществляют поступательные или возвратно-поступательные движения. Достигается это при помощи кинематических передач усложняющих конструкцию и снижающих коэффициент полезного действия привода. Применение линейных электродвигателей позволяет устранить эти недостатки.
В ротационных электродвигателях индуктор представляет собой цилиндр, внутри которого вращается ротор. В плоских линейных электродвигателях индуктор развернут на плоскости. Индуктор цилиндрического линейного электродвигателя — цилиндр, внутри которого линейно перемещаются вторичные элементы.
Основные типы линейных электродвигателей: линейные асинхронные электродвигатели, линейные синхронные электродвигатели, линейные электродвигатели постоянного тока, линейные шаговые электродвигатели. Наибольшее применение получили линейные асинхронные электродвигатели. Первичная обмотка асинхронного линейного электродвигателя возбуждает бегущее электромагнитное поле. В результате взаимодействия первичного поля и индуктируемых токов во вторичном элементе возникает тяговое усилие. Вторичный элемент прямолинейно перемещается. В линейных асинхронных электродвигателях имеют место ухудшающие характеристики краевые эффекты. Разомкнутость магнитной цепи в продольном направлении вызывает продольный краевой эффект. Увеличение числа полюсов индуктора снижает продольный краевой эффект. Наличие на краях вторичного элемента продольных составляющих токов, не создающих полезное тяговое усилие — поперечный краевой эффект. Увеличение ширины вторичного элемента снижает влияние поперечного краевого эффекта. Итак, принцип действия как ротационных, так и линейных электродвигателей имеет одну и ту же физическую природу.
Применение линейных электродвигателей
Линейные электродвигатели применяются там, где они упрощают конструкцию, повышают производительность машин и оборудования, или в тех случаях, когда использование ротационных электродвигателей по их характеристикам невозможно. Применение линейных электродвигателей наиболее перспективно в промышленном и пассажирском транспорте. В конвейерных поездах индукторы электропривода расположены вдоль рельсового пути, вторичный элемент электродвигателя находится на подвижном составе. Такие поезда удобны при транспортировке угля, руды и строительных материалов. На примере системы городского эстакадного пассажирского транспорта показан другой вариант исполнения линейного электродвигателя, где вторичный элемент установлен вдоль пути в виде токопроводящей вертикальной полосы. А индукторы установлены в движущемся вагоне. Линейные асинхронные электродвигатели широко применяются в приводах различных исполнительных механизмов и устройств. В приводах разъединителей тяговых подстанций цилиндрический линей электродвигатель существенно упрощает конструкцию, повышает быстродействие и эксплуатационную надежность оборудования.
В ряде случаев, вторичным элементом двигателя может быть и деталь рабочего механизма. Привод поворотного стола манипулятора осуществлен на базе плоских линейных электродвигателей, что обеспечивает высокую точность углового позиционирования стола и существенно упрощает механическую часть устройства. В отдельных случаях, линейные асинхронные электродвигатели могут эффективно выполнять сразу несколько целевых функций. Литейная карусельная машина. Ее привод реализован на линейных электродвигателях плоского исполнения. Он может перемещать и при технологической необходимости подогревать из ложницы. Коэффициент полезного действия таких приводов значительно выше, чем КПД приводов с одной целевой функцией.
Принцип работы линейного асинхронного электродвигателя может быть использован при создании других электромагнитных устройств, например в сепараторах цветных металлов. Линейные электродвигатели успешно применяются в различных системах внутрицехового транспорта. Основными преимуществами линейных электродвигателей являются возможность получения непосредственного прямолинейного движения, больших скоростей и ускорений, простота конструкции, бесшумность и надежность работы. Развитие микропроцессорной техники и разработка новых средств управления позволяют постоянно расширять области эффективного применения линейных электродвигателей.
использование
Линейные двигатели обычно используются для приведения в действие высокопроизводительного оборудования промышленной автоматизации. Их преимущество, в отличие от любого другого широко используемого актуатора, такого как шариковый винт, ремень ГРМ, или же рейка и шестерня, заключается в том, что они обеспечивают любую комбинацию высокой точности, высокой скорости, большой силы и большого хода.
Широко используются линейные двигатели. Одно из основных применений линейных двигателей — это движение шаттла в ткацкие станки.
Линейные двигатели использовались для раздвижных дверей и различных подобных приводов. Кроме того, они использовались для обработки багажа и даже для перевозки крупногабаритных сыпучих материалов.
Линейные двигатели иногда используются для создания вращательного движения, например, они использовались в обсерваториях для работы с большим радиусом кривизны.
Линейные двигатели также могут быть использованы в качестве альтернативы традиционным подъемникам с цепным приводом для американских горок. Каботажное судно Maverick в Cedar Point использует один такой линейный двигатель вместо цепного подъемника.
Линейный двигатель использовался для разгона автомобилей для краш-тесты.[11]
Индустриальная автоматизация
Сочетание высокой точности, высокой скорости, большого усилия и большого хода делает бесщеточные линейные двигатели привлекательными для привода оборудования промышленной автоматизации. Они обслуживают такие отрасли и приложения, как полупроводники. степперы, электроника технология поверхностного монтажа, автомобильная декартовых координатных роботов, авиакосмическая промышленность химическое измельчение, оптика электронный микроскоп, здравоохранение лабораторная автоматизация, еда и напитки выбрать и разместить.
Станки
Синхронные линейные двигатели приводы, используемые в станках, обеспечивают высокое усилие, высокую скорость, высокую точность и высокую динамическую жесткость, что приводит к высокой плавности движения и малому времени стабилизации. Они могут достигать скорости 2 м / с и микронной точности при коротком времени цикла и гладкой поверхности. [12]
Двигательная установка поезда
Обычные рельсы
Все следующие приложения находятся в быстрый транзит и есть активная часть мотора в автомобилях.[13][14]
Bombardier Innovia Metro
Основная статья: Bombardier Innovia Metro
Первоначально разработанный в конце 1970-х годов УТДК в Канаде как Система транзита промежуточной мощности (ICTS). Испытательный трек построен в г. Миллхейвен, Онтарио, для обширных испытаний автомобилей-прототипов, после чего были построены три линии:
ICTS был продан Бомбардье Транспорт в 1991 году и позже известный как Расширенный быстрый транзит (ART) перед тем, как принять свой текущий брендинг в 2011 году. С тех пор было выполнено еще несколько установок:
Все системы метро Innovia используют третий рельс электрификация.
Японское линейное метро
Одной из самых больших проблем, с которыми столкнулись японские инженеры-железнодорожники в 1970–1980-х годах, было постоянно растущие затраты на строительство метро. В ответ Японская ассоциация метрополитена в 1979 году начала изучение возможности создания «мини-метро» для удовлетворения спроса на городской транспорт. В 1981 году Японская ассоциация инженеров железнодорожного транспорта изучила возможность использования линейные асинхронные двигатели для таких малопрофильных метрополитенов, и к 1984 г. японские специалисты проводили исследования по практическому применению линейных двигателей для городских железных дорог. Министерство земли, инфраструктуры, транспорта и туризма. В 1988 г. была проведена успешная демонстрация Limtrain на Сайтама и повлияли на окончательное внедрение линейного двигателя в Линия Нагахори Цуруми-рёкути в Осака и Toei Line 12 (ныне Линия Тоэй Оэдо) в Токио.[16]
На сегодняшний день следующие линии метро в Японии используют линейные двигатели и воздушные линии для сбора энергии:
Кроме того, Kawasaki Heavy Industries также экспортировал линейное метро в Метро Гуанчжоу в Китае;[17] все линии линейного метро в Гуанчжоу используют электрификацию третьей железной дороги:
Монорельс
Основная статья: Монорельс
. Пожалуйста помоги улучшить эту статью к добавление цитат в надежные источники. Материал, не полученный от источника, может быть оспорен и удален. Найдите источники:
«Линейный двигатель» – Новости
·
газеты
·
книги
·
ученый
·
JSTOR
(Июль 2009 г.)(Узнайте, как и когда удалить этот шаблон сообщения)
Магнитная левитация
Основная статья: Маглев (транспорт)
Бирмингемский международный шаттл на магнитной подвеске
Аттракционы
Основная статья: Список аттракционов
Во всем мире существует множество американских горок, которые используют LIM для ускорения движения транспортных средств. Первое существо Полет страха
в Kings Island и Королевский Доминион, оба открылись в 1996 году.Звездный крейсер Галктика: Человек против Сайлонов & Месть мумии в Юниверсал Студиос Сингапур открыт в 2010 году. Они оба используют LIM для ускорения с определенной точки заездов. Месть мумии также находится в Юниверсал Студиос Голливуд и Юниверсал Студиос Флорида.Невероятный Халк Coaster в Острова приключений Universal также использует линейные двигатели.
Запуск самолета
Предлагаемые и исследования
Асинхронный линейный двигатель
движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы. Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
строительство
Первичная обмотка линейного электродвигателя обычно состоит из плоского магнитного сердечника (обычно ламинированного) с поперечными прорезями, которые часто имеют прямой разрез с катушками, уложенными в прорези, причем каждая фаза дает переменную полярность, так что разные фазы физически перекрываются.
Вторичное часто представляет собой лист из алюминия, часто с железным опорной плитой. Некоторые модули LIM являются двухсторонними, с одной первичной обмоткой на каждой стороне вторичной, и в этом случае железная подкладка не требуется.
Существует два типа линейных двигателей: короткая первичная обмотка
, где катушки усечены короче вторичной обмотки, и короткая вторичная обмотка
, где проводящая пластина меньше. Короткие вторичные модули LIM часто наматываются как параллельные соединения между катушками одной и той же фазы, тогда как короткие первичные обмотки обычно наматываются последовательно.
Первичные обмотки ЛАД с поперечным потоком имеют ряд сдвоенных полюсов, расположенных бок о бок в поперечном направлении с противоположными направлениями намотки. Эти полюса, как правило, производится либо с соответствующим образом вырезать пластины ламинированной подложки или серией поперечных U-образные сердечники.
Магнитный двигатель своими руками: как сделать
Практически все в нашей жизни зависит от электричества, но существуют определенные технологии, которые позволяют избавиться от локальной проводной энергии. Предлагаем рассмотреть, как сделать магнитный двигатель своими руками, его принцип работы, схема и устройство.
Типы и принципы работы
Существует понятие вечных двигателей первого порядка и второго.
Первый порядок – это устройства, которые производят энергию сами по себе, из воздуха, второй тип – это двигатели, которым необходимо получать энергию, это может быть ветер, солнечные лучи, вода и т.д., и уже её они преобразовывают в электричество.
Согласно первому началу термодинамики, обе эти теории невозможны, но с таким утверждением не согласны многие ученые, которые и начали разработку вечных двигателей второго порядка, работающих на энергии магнитного поля.
Фото – Магнитный двигатель дудышева
Над разработкой «вечного двигателя» трудилось огромное количество ученых во все времена, наиболее большой вклад в развитие теории о магнитном двигателе сделали Никола Тесла, Николай Лазарев, Василий Шкондин, также хорошо известны варианты Лоренца, Говарда Джонсона, Минато и Перендева.
Фото – Магнитный двигатель Лоренца
У каждого из них своя технология, но все они основаны на магнитном поле, которое образовывается вокруг источника. Стоит о двигателей не существует в принципе, т.к. магниты теряют свои способности приблизительно через 300-400 лет.
Самым простым считается самодельный антигравитационный магнитный двигатель Лоренца. Он работает за счет двух разнозаряженных дисков, которые подключаются к источнику питания. Диски наполовину помещаются в полусферический магнитный экран, поле чего их начинают аккуратно вращать. Такой сверхпроводник очень легко выталкивает из себя МП.
Простейший асинхронный электромагнитный двигатель Тесла основан на принципе вращающегося магнитного поля, и способен производить электричество из его энергии. Изолированная металлическая пластина помещается как можно выше над уровнем земли.
Другая металлическая пластина помещается в землю. Провод пропускается через металлическую пластину, с одной стороны конденсатора и следующий проводник идет от основания пластины к другой стороне конденсатора.
Противоположный полюс конденсатора, будучи подключенным к массе, используется как резервуар для хранения отрицательных зарядов энергии.
Фото – Магнитный двигатель Тесла
Роторный кольцар Лазарева пока что считается единственным работающим ВД2, кроме того, он прост в воспроизведении, его можно собрать своими руками в домашних условиях, имея в пользовании подручные средства. На фото показана схема простого кольцевого двигателя Лазарева:
Фото – Кольцар Лазарева
На схеме видно, что емкость поделена на две части специальной пористой перегородкой, сам Лазарев применял для этого керамический диск. В этот диск установлена трубка, а емкость заполнена жидкостью. Вы для эксперимента можете налить даже простую воду, но желательно применять улетучивающийся раствор, к примеру, бензин.
Работа осуществляется следующим образом: при помощи перегородки, раствор попадает в нижнюю часть емкости, а из-за давления по трубке перемещается наверх. Это пока что только вечное движение, не зависящее от внешних факторов. Для того чтобы соорудить вечный двигатель, нужно под капающей жидкостью расположить колесико.
На основе этой технологии и был создан самый простой самовращающийся магнитный электродвигатель постоянного движения, патент зарегистрирован на одну российскую компанию. Нужно под капельницу установить колесико с лопастями, а непосредственно на них разместить магниты.
Из-за образовавшегося магнитного поля, колесо начнет вращаться быстрее, быстрее перекачиваться вода и образуется постоянное магнитное поле.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Рассмотрим процесс управления в каждом случае
ШВП и реечная передача содержат большое количество элементов, способных со временем подвергаться износу: вал, шкив, винт, шарики, гайку и т.п. Линейный двигатель в свою очередь содержит только ротор и статор, разделенные воздушны зазором. Между источником энергии и рабочим органом не располагается никаких промежуточных элементов, а передача энергии осуществляется через воздушный зазор. Благодаря отсутствию механических сочленений линейный привод лишен механических люфтов.
В силу меньшего количества этапов преобразования электрической энергии в поступательное движение, линейный привод обладает лучшим КПД, нежели привод на ШВП или зубчатой рейке.
Спектакль
Линейные асинхронные двигатели часто менее эффективны, чем обычные роторные асинхронные двигатели; Концевые эффекты и часто присутствующий относительно большой воздушный зазор обычно уменьшают силы, возникающие при той же самой электрической мощности. Аналогичным образом, эффективность во время работы генератора (электрическое торможение / рекуперация) с линейным асинхронным двигателем была отмечена как относительно низкая из-за конечных эффектов. Большой воздушный зазор также увеличивает индуктивность двигателя, что может потребовать больших и более дорогих конденсаторов.
Принцип работы электродвигателя
> Теория > Принцип работы электродвигателя
Принцип работы электродвигателя основан на использовании эффекта электромагнитной индукции. Само устройство предназначено для создания механической энергии за счёт использования электрических полей. Тип и мощность получаемой энергии зависят от способа взаимодействия магнитных полей и собственно устройства электродвигателя. В зависимости от типа используемого напряжения двигатели классифицируют на постоянного и переменного тока.
Электродвигатель постоянного тока
Принцип действия этих двигателей основан на использования постоянных магнитных полей, создаваемых в корпусе устройства. Для их создания служит либо постоянный магнит, закреплённый на корпусе, либо электромагниты, расположенные по периметру ротора.
Основным отличием двигателей постоянного тока является наличие в их корпусе постоянно действующего магнита, закреплённого на корпусе машины. Мощность электродвигателя зависит от этого магнита, точнее от его поля. Магнитное поле в якоре создаётся при подключении к нему постоянного тока. Но для этого необходимо, чтобы полюса постоянного магнитного поля якоря менялись местами. Для этого используются специальные коллекторно-щёточные устройства.
Они устроены в виде кольца-коллектора, зафиксированного на валу движка и подключённого к обмотке якоря. Кольцо разделено на сектора, разделённые диэлектрическими вставками. Соединение сектора коллектора с цепью якоря создаётся через скользящие по нему графитные щетки. Для более плотного контакта щётки прижимаются к кольцу коллектора пружинами. Графит применяется ввиду своей скользящей способности, высокой теплопроводности и мягкости.
Его применение практически не вредит проводникам коллектора.
При большой мощности электромоторов постоянного тока использование постоянного магнита неэффективно из-за большого веса такого устройства и низкой мощности создаваемого постоянным магнитом поля.
Для создания магнитного поля статора в этом случае используется конструкция из ряда катушечных электромагнитов, подключённых к отрицательной или положительной линии питания.
Одноименные полюсы подключаются последовательно, их количество составляет от одного до четырёх, количество щёток соответствует количеству полюсов, но, в общем, конструкция якоря практически идентична вышеописанной.
Для упрощения запуска электрического двигателя используют два варианта возбуждения:
История
Историю линейных электродвигателей можно проследить, по крайней мере, с 1840-х годов до работы Чарльза Уитстона в Королевском колледже в Лондоне, но модель Уитстона была слишком неэффективной, чтобы быть практичной. Возможный линейный асинхронный двигатель описан в патенте США 782312 (1905; изобретатель Альфред Цеден из Франкфурта-на-Майне) и предназначен для приведения в движение поездов или лифтов. Немецкий инженер Герман Кемпер построил рабочую модель в 1935 году. В конце 1940-х годов профессор Эрик Лейтвейт из Имперского колледжа в Лондоне разработал первую полноразмерную рабочую модель.
котором два противоположных полюса размещаются рядом. Это позволяет использовать очень длинные опоры и, таким образом, обеспечивает высокую скорость и эффективность.
Сравнение характеристик различных типов приводов
Износ
В отличие зубчатой передачи и координатных систем на ШВП, линейный привод не содержит механических компонентов, поэтому обладает высокой степенью надежности и не подвержен износу.
Люфты
Механические люфты системы напрямую влияют на повторяемость позиционирования координатной системы. В силу большего количества механических сочленений координатные системы на ШВП и зубчатой рейке имеют большую величину механического люфта, тогда как координатные системы на линейном приводе лишены механических люфтов.
Точность на длинных ходах
Точность на длинных ходах в случае координатной системы на линейном приводе определяется точностью системы обратной связи по положению (магнитной или оптической линейкой), а также точностью установки портала (прямого угла) и самой системы слежения. В случае координатных систем на основе ШВП или зубчатой рейки, точность определяется качеством изготовления станины и установки направляющих. В обоих случаях, чтобы компенсировать отклонения на больших ходах, требуется калибровка координатной системы при помощи лазерного интерферометра. При отсутствии надлежащего качества производства и инженерно-технических возможностей для калибровки координатной системы, использованием прямого (линейного) привода является более предпочтительным в силу своей простоты.
Динамика
Координатные системы на базе ШВП и зубчатой рейки значительно уступают линейному приводу в том, что касается динамических характеристик. Основной причиной этому являются их конструктивные и технологические особенности (большое количество промежуточных элементов, зазоры, резко меняющееся трение во множестве сопрягаемых деталей, погрешности в шаге винта и многое другое). Все это со временем сказывается на динамических характеристиках станка.
В свою очередь, в системах с линейным приводом решены вопросы обеспечения требуемых динамических характеристик как при управлении траекторией движения, так и при обеспечении должной точности позиционирования.
Надёжность
В силу меньшего количества механических компонентов и сочленений система на линейном приводе обеспечивает наиболее высокий уровень надёжности. Однако, всегда следует помнить, что привод является не единственным компонентом станка лазерной резки, и следует оценивать общую надёжность системы в целом.
Точность контурных перемещений мало зависит от типа привода и определяется в первую очередь механической жёсткостью конструкций координатной системы (в т.ч. портала), а также частотным ответом координатной системы (который, в свою очередь, зависит от конструктивных особенностей портала, крепления головки и других компонентов).
Точность контурных перемещений также связана с динамическими характеристиками координатной системы. Установив мощный привод можно добиться высокой динамики на холостых ходах (с отключенным инструментом), но для обеспечения точности, если конструкция станка недостаточно жёсткая, требуется значительное понижение значений ускорений и торможений.
Стоимость
Координатная система на линейном приводе дороже, чем координатная система на ШВП или зубчатой рейке. Это объясняется тем, что для прямого привода требуется длинная «магнитная дорога», вдоль которой и движется привод, собранная из мощных неодимовых магнитов. В то время как у обычного серводвигателя количество таких магнитов значительно меньше и они находятся на роторе, который поворачивается множество раз в пределах рабочего хода координаты.
Таблицу можно прокручивать влево/вправо
| Координатная система на ШВП | Координатная система на зубчатой рейке | Линейный двигатель |
| Подвержена износу. Высокий износ при некачественном изготовлении. | Подвержена износу. Высокий износ при некачественном изготовлении. | Отсутствие изнашиваемых компонентов. |
| Наличие люфтов в тележках и приводе, влияющих на точность. | Наличие люфтов в тележках и приводе, влияющих на точность. | Отсутствие механических люфтов. |
| Снижение точности на длинных ходах. | Снижение точности на длинных ходах. | Высокая точность на любых ходах. |
| Средняя динамика. | Высокая динамика перемещения (при использовании мощного привода). | Высокая динамика перемещения (при использовании мощного привода). |
| Высокая надёжность при должном качестве изготовления. | Высокая надёжность при должном качестве изготовления. | Высокая надёжность. |
| Средняя стоимость. | Средняя стоимость. | Высокая стоимость. |
Выводы
Линейный привод обладает рядом неоспоримых преимуществ, по сравнению с ШВП или реечной передачей. Сам по себе линейный привод увеличивает срок службы оборудования, повышает точность координатной системы и динамику перемещений.
При этом нельзя утверждать, что использование ШВП и зубчатой рейки больше не актуально в современном станкостроении. При должном качестве изготовления, данные схемы перемещения хорошо характеризуют себя в технике начального уровня — маломощных станках, для которых не предъявляется высоких требований к скорости и количеству выпускаемой продукции. Тем не менее, для станков более высокого уровня — линейный привод по-прежнему остается наиболее эффективным решением, обеспечивающим высокую динамику и прецизионную точность позиционирования.
Компания Unimach производит станки на всех трёх типах приводов: ШВП, зубчатой рейке и линейном (прямом) приводе, что позволяет всегда предложить наиболее эффективное решение с точки зрения цены, производительности и надёжности для каждой задачи.
Источник
Достоинства и недостатки линейного двигателя
- Подробности
- Категория: Подвижной состав
оборудование поездов
тяга
Содержание материала
Применение линейных двигателей
Историческая справка
Принцип действия и конструкции
Достоинства и недостатки
Регулирование скорости и тяги
Перспективы применения
Страница 4 из 6
Достоинствами линейных асинхронных двигателей, используемых в качестве двигателя транспортных средств, являются:
отсутствие скользящих электрических контактов, вращающихся деталей и зубчатых колес; из-за отсутствия в приводе зубчатой передачи эксплуатационные расходы могут быть снижены на 25%;
отсутствие ограничений, обусловливаемых сцеплением колес с рельсами;
уменьшение массы двигателя, установленного на вагоне, связанное с тем, что элемент, играющий роль вторичного элемента, установлен на полотне дороги, однако в отличие от двигателей с вращающимися частями скорость ротора относительно статора не может быть повышена путем применения зубчатых колес. Это способствует увеличению веса линейного двигателя с продольным потоком по сравнению с эквивалентным двигателем с вращающимися частями, установленным на обычном вагоне. Следует сказать, что в связи с изобретением линейного двигателя с поперечным потоком этот недостаток несколько смягчается·;
улучшение тепловых характеристик, объясняемое тем, что работающий двигатель удаляется от нагреваемой им части реактивной шины;
отсутствие ограничений, накладываемых предельно допустимой окружной скоростью вращающихся деталей;
при экстренном торможении не возникает проблем. Чтобы затормозить вагон, надо поменять направление бегущего магнитного поля переключением двух фаз или питать обмотки линейного двигателя постоянным током, а также можно использовать рекуперативное торможение. Для этого необходимо снижать частоту питания, чтобы синхронная скорость была меньше скорости вагона. В этом случае линейный двигатель будет работать в режиме генератора [113];
двигатель бесшумный, не загрязняет воздух [122].
Линейному двигателю присущи следующие недостатки:
применение линейного двигателя связано с недостаточным использованием габарита подвижного состава;
увеличение стоимости из-за необходимости выполнения реактивной шины из цветного металла;
относительно низкий к.п.д. и коэффициент мощности; необходимость выполнения поперечной направляющей системы; трудность обеспечения прохождения кривых участков пути и стрелочных переводов;
необходимость обеспечения питания трехфазным током при переменных напряжениях и частоте [113, 154];
необходимо поддерживать малый зазор между неподвижным и подвижным элементами двигателя [122].
Есть еще одна проблема, которая присуща всем высокоскоростным видам электрического транспорта, — это проблема токосъема при высоких скоростях. Этим вопросом занимаются во многих странах мира [196, 197].
Все указанные недостатки являются недостатками конструкций и могут быть устранены по мере дальнейших разработок, а к. п.д. и cosφ зависят от особенностей линейного асинхронного двигателя.
Магнитные поля в тяговых линейных двигателях отличаются от магнитных полей реактивных асинхронных двигателей в силу ряда обстоятельств. Одни из них связаны с различием в параметрах (например, в десятки раз больший зазор в магнитной системе линейного двигателя) и отражаются на количественной стороне явлений, другие связаны с особенностями конструкции линейного двигателя и вызывают новые физические явления в машине.
Отметим важнейшие из них.
Индуктор тягового линейного двигателя имеет конечную длину в направлении бегущего магнитного поля, которое как бы возникает на одном и исчезает на другом конце сердечника индуктора. Эту особенность характеризуют как «разомкнутость» магнитной системы линейного двигателя. Она, в частности, вызывает несимметрию токов в обмотках индуктора и пульсирующую составляющую магнитного поля индуктора [21, 168]. Пульсацию магнитного поля можно уменьшить при помощи компенсирующих катушек или полностью устранить при помощи новой конструкции магнитной системы линейного двигателя [21, 126, 154]. Это явление называется первичным продольным краевым эффектом.
Отдельные участки реактивной шины последовательно входят в магнитное поле движущегося индуктора и затем выходят из этого поля. Процессы «входа-выхода» вызывают ряд новых, характерных и неустранимых явлений, совокупность которых называют вторичным продольным эффектом. Токи, наводимые в участках реактивной шины, определяются изменением магнитных потоков, сцепленных с контурами токов на этих участках. Изменение в потокосцеплениях вызывается как перемещением поля (скольжением) индуктора относительно шины со скоростью V=SV, так и процессами «входа» участков реактивной шины в магнитное поле индуктора и последующим их «выходом» из этого поля. Соответственно с этим токи в шине могут быть подразделены на токи скольжения, создающие тяговые усилия линейного двигателя, и вихревые токи, связанные с установлением и исчезновением магнитного поля в участках шины при их проходе через зазор индуктора.
Магнитные поля индуктора подразделяются на главное поле и на боковые и торцевые поля рассеяния. Последние являются пульсирующими полями. Явление вторичного краевого эффекта заключается в том, что в проводящем вторичном элементе не может сразу, мгновенно возникнуть магнитный поток. Во вторичном элементе возникает мгновенно электрическое поле, и токи, создаваемые этим полем, стремятся создать противопоток, в результате чего на входе резко падает индукция.
Аналогичная картина на выходе, только там токи во вторичном элементе стараются препятствовать уменьшению потока, и магнитное поле выносится за конец индуктора. Это явление тем ярче выражается, чем выше синхронная скорость.
Описанные краевые эффекты более или менее подробно анализированы в литературе [1, 6, 7, 21, 26, 31-33, 75, 76, 83, 97, 101, 120, 125, 129, 130, 141, 146, 159, 170-173]. Одновременно и в Японии [141], и в СССР, в Ленинградском политехническом институте и в ВЭлНИИ, были получены результаты, которые не объясняются ранее разработанной теорией вторичного продольного эффекта [204—206].
Лабораторный макет тягового линейного двигателя был разработан ВЭлНИИ и изготовлен на Новочеркасском электровозостроительном заводе. Все физические процессы в нем протекали, как в реактивном линейном двигателе, и было обеспечено удобство исследований. Он состоит из индуктора с двойным сердечником 1 (рис. 14), несущим обмотку 2 и установленным на раму 3 так, что зазор между сердечниками может регулироваться в пределах 20-50 мм. Функции реактивной шины в макете выполняет реактивный диск 4 из дюралюминия, насаженный на вал нагрузочной машины постоянного тока. Первый вариант сердечников имел среднюю длину 860 мм при ширине 120 мм. На сердечнике уложена шестиполюсная трехфазная обмотка.
Особенностью данного исполнения макета тягового линейного двигателя, отличающей его от аналогичных установок, является дугообразная форма сердечников индуктора. Этим обеспечивается соответствие траекторий бегущего магнитного поля индуктора и перемещений в нем элементов вращающегося реактивного диска, следствием чего является соответствие процессов макета линейного тягового двигателя данного исполнения таковым в реальном тяговом двигателе с поступательным движением элементов. Установка питается от машинного агрегата, чем обеспечивается синусоидальная форма кривых тока в обмотках линейного двигателя и снимаются побочные явления, связанные с, высшими гармоническими тока.
Рис. 14. Макет линейного двигателя.
По механическим параметрам макет тягового линейного двигателя может работать при линейных скоростях до 350 км/ч, но и по условиям питания эта скорость была ограничена 100 км/ч. Линейная скорость диска относится к середине ширины пакетов стали индуктора [204, 207].
При малых синхронных скоростях вторичного элемента вместо тормозных усилий появляются тяговые, при постепенном увеличении синхронной скорости тяговые усилия уменьшаются и переходят в тормозные (рис. 15) [205, 141].
Существуют также краевые поперечные эффекты, которые проявляются в поперечном направлении двигателя, так как ширина сердечника ограничена. Краевые поперечные эффекты существуют и во вращающихся машинах, но они менее значительны. Во-первых, во вращающемся двигателе ток проходит по проводникам, расположенным в роторе (за некоторым исключением), а не в общей массе ротора. В роторе асинхронного двигателя активный ток проходит по токопроводящим стержням, а обратный — по короткозамкнутым кольцам. Сплошной ротор линейного двигателя не позволяет отделить активные токи от обратных. Во-вторых, ширина ротора и статора во вращающемся двигателе одинакова. В линейном двигателе ротор может быть шире, чем статор, иметь ту же либо меньшую ширину, чем статор.
Обратные токи протекают и в тех зонах ротора, которые расположены за статором, если статор уже, чем ротор.
Если же в силу конструктивных причин статор шире, чем ротор, то обратные токи, естественно, проходят в частях ротора, находящихся в активной зоне статора. Поток возбуждения плохо используется, и это явление приводит к кажущемуся увеличению вторичного сопротивления. Этот эффект стремится увеличить пусковое усилие, но номинальный режим работы двигателя становится менее эффективным [175].
Рис. 15. Зависимость результирующей электромагнитной силы, вызванной процессами «входа-выхода», от индукции для различных синхронных скоростей движения
Явление описано и в зарубежной, и в отечественной литературе [8, 10, 11, 15, 68, 69, 71, 115].
<< Назад
Вперёд >>
Назад
Вперёд
Последние публикации
Близкие публикации:
Ремонт тяговых электродвигателей
Организация текущего ремонта ТР-3 тяговых электродвигателей тепловозов
Подвешивание тягового электродвигателя
Коллекторный тяговый электродвигатель
Асинхронные тяговые двигатели
© 2009-2022 — lokomo. ru, железные дороги.
Дуговой двигатель. Линейный двигатель. Электрические машины синхронной связи. Режимы работы АМ презентация, доклад
1.Дуговой двигатель
2.Линейный двигатель
3.Электрические машины синхронной связи
4. Режимы работы АМ
Асинхронные машины
5.Конструктивные формы исполнения АМ
6.Способы охлаждения ЭМ
Линейные асинхронные двигатели
Подвижная часть линейного двигателя совершает поступательное движение, поэтому применение этих двигателей для привода рабочих машин с поступательным движением рабочего органа позволяет :
упростить кинематику механизмов, уменьшить потери в передачах и повысить надежность механизма в целом .
Для объяснения принципа работы линейного асинхронного двигателя (ЛАД) обратимся к обычному АД (с вращательным движением ротора).
Если статор этого двигателя (рис. 1, а) мысленно «разрезать» и «развернуть» так, чтобы он образовал дугу с углом α (рис. 1, б), то диаметр ротора увеличится. При этом мы получим АД с дуговым статором. Частота вращения (об/мин) магнитного поля статора этого двигателя (синхронная частота):
n1 = n01 α /(2π)
(1)
где n01 — синхронная частота вращения обычного (до «разрезания») асинхронного двигателя, об/мин; α — угол дуги статора, рад.
Из (1) следует, что, изменяя угол α, можно получить дуговой асинхронный двигатель на любую синхронную частоту меньше частоты вращения n01.
Дуговые двигатели применяют для безредукторного привода устройств, требующих небольших частот вращения, исключив применение сложного и трудоемкого редуктора.
Если же «разрезанный» статор развернуть в плоскость, то получим асинхронный линейный двигатель (ЛАД) (рис. 1, в).
Рис. 1. К понятиям о дуговом и линейном двигателях:
а)обычный АД; б)дуговой АД: в) линейный АД (ЛАД)
Принципиальное конструктивное отличие ЛАД от асинхронного двигателя с вращательным движением ротора состоит в том, что первичный элемент линейного двигателя (индуктор) создает не вращающееся, а бегущее магнитное поле и нижняя часть двигателя с короткозамкнутой обмоткой (или без нее) называемая вторичным элементом, перемещается вдоль своей оси. Скорость бегущего поля в линейном двигателе (м/с) определяют по зависимости:
v1 = 2τf1 = f1Lc /p (2)
где f1 — частота тока в обмотке статора, Гц; τ — полюсное деление; Lc — длина статора (индуктора), м.
Принцип действия ЛАД :
бегущее поле индуктора, сцепляясь с к.з. обмоткой вторичного элемента двигателя, наводит в ней ЭДС. Возникающие в стержнях этой обмотки токи взаимодействуют с бегущим полем индуктора и создают на индукторе и вторичном элементе электромагнитные силы, стремящиеся линейно переместить подвижную часть двигателя относительно неподвижной. В некоторых конструкциях ЛАД подвижной частью является индуктор, а в некоторых — вторичный элемент, называемый в этом случае «бегунком».
Если вторичный элемент ЛАД невозможно изготовить с к.з. обмоткой, то применяют вторичные элементы в виде полосы из меди, алюминия или ферромагнитной стали. Наиболее удовлетворительными получаются характеристики ЛАД при составном вторичном элементе, например,- полоса из ферромагнитной стали, покрытая слоем меди.
Основной недостаток асинхронных двигателей с разомкнутым статором — дуговых и линейных — явление краевого эффекта, представляющего собой комплекс электромагнитных процессов, обусловленных разомкнутой конструкцией статора.
Нежелательные последствия краевого эффекта – это появление «паразитных» тормозных усилий, направленных против движения подвижной части двигателя, и возникновение поперечных сил, стремящихся сместить подвижную часть двигателя в поперечном направлении.
Кроме того, краевой эффект вызывает ряд других нежелательных явлений, ухудшающих рабочие характеристики линейных двигателей.
Применяют ЛАД для привода заслонок, ленточных конвейеров, подъемно-транспортных механизмов. На рис. 2 показано устройство ЛАД привода тележки подъемного крана.
Рис. 2. ЛАД привода тележки
подъемного крана
На тележке 3 расположен индуктор ЛАД, состоящий из шихтованного сердечника 6, в пазах которого расположена обмотка 5. Направляющая для колес 2 представляет собой стальную балку 1, к нижней части которой прикреплена стальная полоса 4 («бегун»). Бегущее магнитное поле индуктора наводит в стальной полосе 4 вихревые токи. Электромагнитные силы, возникающие в результате взаимодействия этих токов с магнитным полем индуктора, перемещают индуктор (тележку) вдоль стальной полосы 4.
Рис 3. ЛАД привода ж. д. транспортного средства
ЛАД значительной мощности применяют на транспорте в качестве тяговых двигателей (рис. 3) . Здесь индуктор 2 двигателя подвешен к транспортному средству 1, а стальная полоса 3 установлена вертикально на основании пути между рельсами. В этой конструкции поперечную силу FП, вызванную краевым эффектом, используют полезно, так как она уменьшает силу давления на несущие оси и колеса и, как следствие, уменьшает трение качения.
3
Понятие сельсины
Вообще словом сельсин называют электрические микромашины переменного тока, обладающие свойством самосинхронизации.
Само слово сельсин произошло от английского словосочетания self-synchronizing .
Сельсин передачи работают по принципу обычной механической передачи, только крутящий момент между валами передаётся не зубьями шестерён,
а магнитным потоком без непосредственного контакта.
.
.
Простейший сельсин состоит из статора с трёхфазной обмоткой (схема включения — треугольник или звезда) и ротора с однофазной обмоткой. Два таких устройства электрически соединяются друг с другом одноимёнными выводами — статор со статором и ротор с ротором.
На роторы подаётся одинаковое переменное напряжение. При таких условиях вращение ротора одного сельсина вызывает поворот ротора другого сельсина. При повороте одного из сельсинов (сельсин-датчика) на определённый угол в нём наводится ЭДС, отличная от первоначальной. Поскольку сельсины (их роторы) соединены, то эта же ЭДС будет возникать и во втором сельсине (сельсин-приёмнике) и по правилу левой руки он отклонится от первоначального положения на тот же угол.
Представим себе такую конструкцию: два обыкновенных электродвигателя, но роторы у них сделаны по-хитрому — они содержат обмотку (типа измерительной). Статор этих электродвигателей сделан как обыкновенный трехфазный двигатель: имеет три обмотки.
Если включить все обмотки по такой схеме :
То картина у нас получится следующая: поворот ротора в одном из сельсинов (ну пусть, к примеру, на левом) вызовет изменение ЭДС в окружающих его обмотках (по принципу обыкновенного трансформатора), эта самая ЭДС передастся на обмотки другого сельсина и вызовет поворот ротора в нём на тот-же угол
Кстати, сельсины еще иногда называют вращающийся трансформатор.
Зачем вообще нужно такое устройство как сельсин? Обычно он требуется в тех случаях, когда нужно либо передать вращение дистанционно либо следить за вращением.
Примеры применения сельсинов:
В радиолокации: при помощи сельсинов передается угол вращения приемно-передающей антенны. Один устанавливают непосредственно на саму кабину вращения (или антенну, смотря какая антенна), другой — в приемной кабине в индикаторе.
В радиолюбительской связи — когда требуется повернуть антенну на определенный угол дистанционно.
Электрические машины синхронной связи
(сельсины)
В современной технике часто возникает необходимость в синхронизации вращения или поворота осей механизмов. Эта задача успешно решается с помощью системы синхронной связи (системы слежения).
Синхронной связью называют электрическую связь, которая обеспечивает одновременное вращение или одновременный поворот двух (или более) находящихся на расстоянии друг от друга и механически не связанных валов.
Распространены два вида систем синхронной связи: система «электрического вала» (синхронного вращения) и система «передачи угла» (синхронного поворота).
Системы электрического вала применяют для синхронного (одновременного) вращения нескольких механизмов, имеющих значительные нагрузочные моменты на валу. Для привода таких механизмов применяют обычные асинхронные двигатели с фазным ротором. При этом
обмотки роторов электрически соединяют друг с другом, а обмотки статоров включают в общую сеть трехфазного тока.
Системы передачи угла (синхронного поворота) применяют для дистанционного управления или контроля положения в пространстве каких-либо устройств. Обычно такую систему выполняют на небольших асинхронных машинах (однофазных или трехфазных), называемых сельсинами.
Наибольшее применение получили однофазные сельсины. Такой сельсин имеет однофазную обмотку возбуждения и трехфазную обмотку синхронизации, соединенную звездой. Одну из обмоток располагают на роторе, а другую — на статоре.
Простейшая синхронная передача, называемая индикаторной, содержит два сельсина: сельсин-датчик (СД) и сельсин-приемник (СП) (рис. 4). При включении обмоток возбуждения в сеть на напряжение U1 в каждом из сельсинов создается магнитный поток возбуждения Ф. В обмотке синхронизации СД этот поток наводит ЭДС Ед, а в обмотке синхронизации СП — ЭДС Еп. Эти ЭДС направлены встречно.
Рис. 4. Схема синхронной передачи
Если роторы СД и СП занимают одинаковые положения относительно своих статоров, то Ед = Еп и система находится в равновесии – тока в общей цепи не будет.
Если же ротор СД повернуть на некоторый угол αд, то ЭДС в обмотке синхронизации СД изменится, равенство ЭДС нарушится ( Ед ≠ Еп ) и в цепи синхронизации появится результирующая ЭДС
которая создаст ток синхронизации
где Zд , Zп и Zл — сопротивления обмоток синхронизации СД и СП и сопротивление линейных проводов, Ом.
Ток синхронизации датчика взаимодействует с потоком возбуждения и создает на роторе СД электромагнитный момент, направленный встречно повороту ротора датчика,
т. е. момент, противодействующий механизму, поворачивающему ротор СД на заданный угол αд.
Ток синхронизации СП также взаимодействует с магнитным потоком возбуждения и создает
электромагнитный момент, направленный в сторону поворота ротора СД. Под действием этого момента, называемого синхронизирующим, ротор приемника совершает поворот на угол αп ≈ αд . После этого ротор СП займет такое же положение относительно статора, что и ротор СД, и в системе опять восстановится равновесие, так как ЭДС Еп и Ед станут одинаковыми. Если ротор СД вновь повернуть на некоторый угол, то этот же угол поворота будет воспроизведен приемником
При вращении ротора датчика ротор приемника также будет вращаться с такой же частотой. Однако угол поворота, установленный СД, воспроизводится ротором СП с некоторой ошибкой — рассогласованием. Для поворота ротора приемника необходимо, чтобы синхронизирующий момент, действующий на этот ротор, преодолел противодействующий момент, обусловленный силами трения в подшипниках и на контактных кольцах, а иногда еще и полезной нагрузкой на валу приемника. Ошибка в воспроизведении угла поворота оценивается углом рассогласования
Θ = αД — αп
Ротор СП синхронно следует за ротором СД, но угол рассогласования между роторами сельсинов всегда имеется и тем больше, чем больше противодействующий момент на валу СП. Угол рассогласования обычно не превышает 2,5°, а у сельсинов высокой точности он не более 0,75°.
Режимы работы асинхронной машины
Рис. 5. Режимы работы асинхронной машины
В режиме работы двигателя (рис. 5,б) без нагрузки на валу (режим холостого хода) ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1 и скольжение весьма мало отличается от нуля (s ≈ 0).
Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением sнom. Для асинхронных двигателей общего назначения
sнom = 1…8%, при этом для двигателей больщой мощности sном = 1%, а для двигателей малой мощности sном = 8%.
Генераторный режим.
Если обмотку статора включить в сеть, а ротор АМ посредством приводного двигателя ПД (двигатель внутреннего сгорания, турбина и т. п.), являющегося источником механической энергии, вращать в направлении вращения магнитного поля статора с частотой n2 > n1 , то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом работы той же машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление (АМ будет отдавать энергию в сеть).
Электромагнитный момент на роторе М также изменит свое направление, т. е. будет направлен встречно вращающемуся магнитному полю статора и станет тормозящим по отношению к вращающемуся моменту приводного двигателя М1 (рис. 5, а). В этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную мощность Р2 переменного тока.
Особенность работы асинхронного генератора состоит в том, что вращающееся магнитное поле в нем создается реактивной мощностью Q трехфазной сети, в которую включен генератор и куда он отдает вырабатываемую активную мощность Р2. Следовательно, для работы асинхронного генератора необходим источник
переменного тока, при подключении к которому происходит возбуждение генератора, т. е. в нем возбуждается вращающееся магнитное поле.
Режим торможения противовключением.
Если у работающего трехфазного АД поменять местами любую пару подходящих к статору из сети присоединительных проводов, то вращающееся поле статора изменит направление вращения на обратное.
При этом ротор АМ под действием сил инерции будет продолжать вращение в прежнем правлении. Другими словами, ротор и поле статора АМ будут вращаться в противоположных направлениях.
В этих условиях электромагнитный момент машины, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие (рис. 5, в).
Этот режим работы АМ называют электромагнитным торможением противовключением.
Активная мощность, поступающая из сети в машину при этом режиме, частично затрачивается на компенсацию механической мощности вращающегося ротора, т. е. на его торможение. В режиме электромагнитного торможения частота вращения ротора является отрицательной,
а поэтому скольжение приобретает положительные значения больше единицы:
1
Конструктивные формы исполнения электрических машин
Свойства электрических машин определяются не только их электромеханическими параметрами и формой характеристик.
Прежде всего, ЭМ должна быть:
безопасной в эксплуатации для обслуживающего персонала,
удобной при монтаже,
успешно противостоять воздействиям внешних факторов.
Перечисленные требования учитываются конструктивными формами исполнения ЭМ, которые определяются:
степенью защиты,
способами охлаждения и монтажа,
климатическими условиями и
местом эксплуатации
Степень защиты электрических машин обозначают двумя буквами IP — начальные буквы слов International Protection (международная защита) и двумя цифрами (44 или 23).
Первая цифра обозначает степень защиты персонала от соприкосновения с токоведущими и вращающимися частями и от попадания внутрь машины твердых тел.
Вторая цифра обозначает степень защиты от попадания внутрь машины воды.
Для машин напряжением до 1000 В установлено шесть степеней защиты, обозначаемых следующим образом:
0 — защита отсутствует;
1 — зашита от случайного соприкосновения большого участка человеческого тела с токоведущими и вращающимися частями;
2 — защита от соприкосновения пальцев человека с токоведущими и вращающимися частями и зашита от попадания внутрь машины твердых тел диаметром не менее 12,5 мм;
3 — защита от соприкосновения с токоведущими и вращающимися частями инструмента, проволоки и других предметов, толщина которых превышает 2,5 мм; защита от попадания внутрь машины твердых тел диаметром не менее 2,5 мм;
4 — защита от соприкосновения с токоведущими и вращающимися частями предметов толщиной более 1 мм и защита от попадания внутрь машины твердых тел толщиной не менее I мм;
5 — полная защита от соприкосновения с токоведущими и вращающимися частями и полная защита от вредных отложений пыли внутри машины.
Существует девять степеней защиты от проникания воды внутрь машины:
0 — защита отсутствует;
1 — защита от капель сконденсировавшейся воды, падающих вертикально;
2 — защита от капель воды, падающих под углом не более 15° к вертикали.
3 — защита от дождя, падающего под углом не более 60° к вертикали;
4 — защита от брызг воды любого направления;
5 — защита от водяных струй в любом направлении;
6 — защита от воздействий, характерных для палубы корабля, включая захлестывание морской волной;
7 — защита при погружении в воду в течение времени и давлении, указанных в стандарте;
8 — зашита при погружении в воду на неограниченное время при давлении указанном в стандарте
Способы охлаждения электрических машин
По способу охлаждения электрические машины разделяют на два вида:
машины с естественным охлаждением и
машины с искусственным охлаждением.
Естественное охлаждение электрических машин.
Эти машины не имеют вентиляторов или каких-либо других устройств, способствующих охлаждению машины.
Охлаждение происходит естественным путем за счет теплопроводности и конвекции.
Искусственное охлаждение электрических машин.
В этом случае в машинах применяют специальное устройство, обычно вентилятор, создающий движение в машине воздуха, охлаждающего нагретые части машины.
Значительную группу машин с искусственным охлаждением составляют машины с самовентиляцией, у которых вентилятор закреплен на валу машины;
в процессе работы он, вращаясь, создает аэродинамический напор.
Самовентиляция может быть наружной и внутренней.
При наружной самовентиляции воздухом обдувается внешняя поверхность корпуса статора. Машина в этом случае имеет закрытое исполнение с ребристой поверхностью
(для увеличения поверхности охлаждения) (рис. 9.а).
При внутренней самовентиляции в корпусе и подшипниковых щитах машины делают специальные отверстия, через которые из окружающей машину среды воздух проникает внутрь машины, охлаждает ее, а затем выбрасывается наружу (рис.6 и рис.9,б)..
Рис. 6. Принцип внутренней самовентиляции электрической машины
Для более эффективного охлаждения в магнитопроводе некоторых электрических машин делают вентиляционные каналы, через которые проходит охлаждающий воздух.
Вентиляционные каналы называют аксиальными, если они расположены параллельно оси ротора, и радиальными, если они расположены перпендикулярно этой оси.
Вентиляцию, при которой охлаждающий воздух перемещается вдоль оси машины, называют аксиальной (рис. 7, а).
Если же воздух перемещается перпендикулярно оси машины по радиальным каналам, то вентиляцию называют радиальной (рис. 7,б).
Рис.7. Аксиальная (а) и радиальная (б) системы вентиляции:
1 — статор; 2 — ротор
Конструктивные формы исполнения по степени защиты увязаны со способами охлаждения и с высотой оси вращения.
За высоту оси вращения машины принимают расстояние от оси вращения вала до опорной плоскости лап (рис.8).
Рис.8. Высота оси вращения электрической машины
Серии трехфазных асинхронных двигателей
Серия трехфазных асинхронных двигателей 4А охватывает диапазон мощностей от 0,06 до 400 кВт.
В основу разделения двигателей на типоразмеры положен конструктивный параметр — высота оси вращения h
(см. рис. 8).
Двигатели серии 4А изготовляют с высотой оси вращения 50,56,63, 71,80,90, 100, 112, 132, 160, 180,200,225, 250,
280,315 и 355 мм.
Двигатели каждой высоты оси вращения выполняют двух типоразмеров с разной длиной пакетов сердечников, но одинаковым штампом их пластин.
Двигатели изготовляют на синхронные частоты вращения 3000, 1500, 1000, 750, 600 и 500 об/мин .
Рис. 9. Асинхронные двигатели серии 4А:
а — закрытого обдуваемого исполнения, б — защищенного исполнения
Двигатели серии 4А изготовляют в двух исполнениях:
1.закрытое обдуваемое (рис. 9, а) и
2.защищенное с внутренней самовентиляцией (рис. 9, б).
Двигатели закрытого исполнения всего диапазона высот осей вращения изготовляют с к.з. ротором,
а при высоте оси вращения 200, 225 и 250 мм — еще и с фазным ротором (4АК).
Двигатели защищенного исполнения изготовляют с к.з. ротором (4АН) при высоте оси вращения h > 160 мм,
а при высоте оси вращения h > 200 мм еще и с фазным ротором (4АНК)..
Пример расшифровки типоразмера АД:
Обозначение типоразмера двигателя серии 4А, например, 4АН280М2УЗ, расшифровывается следующим образом:
4 — порядковый номер серии,
А — вид двигателя (асинхронный),
Н — защищенный (отсутствие данного знака означает закрытое обдуваемое исполнение),
280 — высота оси вращения (три или две цифры), мм,
S, М или L — установочный размер по длине станины,
2 (или 4, 6, 8, 10, 12) — число полюсов,
УЗ — климатическое исполнение (У) и категория размещения (3).
Линейный асинхронный двигатель: принцип работы, характеристики и применение движение вместо вращательного движения. Помимо крутящего момента, это устройство генерирует линейное движение и силу. Вырезав вырез радикальной формы во вращающемся индукторе и, таким образом, выровняв сечение, конструкция и функциональность линейного асинхронного двигателя могут быть продемонстрированы на диаграмме ниже.
Однофазный линейный асинхронный двигатель
Каталог
Чарльз Уитстон начал проектировать линейный асинхронный двигатель в Лондоне в 1840-х годах, но он по-прежнему неэффективен. Принимая во внимание, что Герман Кемпер разработал операционную модель в 1935 году, а Эрик представил полноразмерную операционную версию в 1940 году. После этого это устройство использовалось во множестве приложений в самых разных отраслях. Линейный асинхронный двигатель, его теория работы, производительность, архитектура, конструкция, преимущества и недостатки, а также основные области применения подробно описаны в этой статье. Давайте подробнее рассмотрим концепцию.
LIM расшифровывается как Linear Induction Motor и представляет собой улучшенную версию роторного асинхронного двигателя, который производит линейное поступательное движение вместо вращательного движения. Помимо крутящего момента, это устройство генерирует линейное движение и силу. Вырезав вырез радикальной формы во вращающемся индукторе и, таким образом, выровняв сечение, конструкция и функциональность линейного асинхронного двигателя могут быть продемонстрированы на диаграмме ниже.
Выход представляет собой ровный статор или статор с железными пластинами на верхней стороне, несущие трехфазные многополюсные обмотки с проводниками, расположенными под углом 900 градусов к направлению движения. Он также включает обмотку с беличьим корпусом, которая обычно состоит из бесконечного алюминиевого или медного листа, удерживаемого на твердой железной опоре.
Независимо от названия устройства, не все линейные асинхронные двигатели генерируют линейное движение, и лишь немногие из них используются для обеспечения оборотов большого диаметра, что делает использование бесконечных первичных секций более дорогим.
I. Общие сведения о линейном асинхронном двигателе
1. Конструкция линейного асинхронного двигателя
И если это не кажется стандартным асинхронным двигателем, основная структура и архитектура линейного асинхронного двигателя почти идентичны таковым у трехфазного асинхронного двигателя. Первичная часть линейного асинхронного двигателя создается в месте разреза в секции статора многофазного асинхронного двигателя и располагается на плоской поверхности. Точно так же, когда разрез делается в части ротора многофазного асинхронного двигателя и располагается на плоской поверхности, формируется вторичная часть линейного асинхронного двигателя.
Кроме того, существует модель линейного асинхронного двигателя под названием DLIM (Двусторонний линейный асинхронный двигатель), которая используется для повышения производительности. В этой модели основной сегмент расположен на противоположном конце вторичного сегмента. Как на главной, так и на вторичной сторонах эта конструкция используется для увеличения использования потока. Так устроен линейный асинхронный двигатель.
2. Принцип работы линейного асинхронного двигателя
Когда для питания первичной части двигателя используется управляемое трехфазное управление, поток потока возникает по всей длине первичной части. Вращающееся магнитное поле в статорной части трехфазного асинхронного двигателя эквивалентно этому линейному вращению магнитного поля.
Из-за относительного ускорения между проводником и движением потока может возникнуть индукция электрического тока в проводниках вторичной обмотки. Индуцированный ток взаимодействует с движением потока, создавая либо линейную, либо круговую тягу энергии, как видно из:
Vs = 2tfs м/сек
сила вынуждает вторичную секцию двигаться в том же направлении, что и первичную секцию, создавая требуемое прямолинейное смещение. Когда на устройство подается питание, создаваемое поле становится линейно движущимся полем со скоростью, представленной приведенным выше уравнением.
Величина частоты питания, рассчитанная в Гц, выражается в уравнении как fs.
Линейное движущееся поле, оцениваемое в м/с, обозначается буквой «Vs».
Буква «t» обозначает шаг линейного полюса, то есть расстояние между полюсами, измеренное в метрах.
В = (1-с)Вс
Согласно той же логике, в случае асинхронного двигателя вторичный бегунок не сохраняет ту же скорость, что и значение скорости магнитного поля. В результате этого происходит скольжение.
Ниже приведена схема линейного индукционного двигателя:
3. Преимущества и недостатки линейного индукционного двигателя
. сил. Поскольку в системах LIM нет постоянных магнитов, при сборке машины сила притяжения отсутствует.
Преимущество линейных асинхронных двигателей заключается в том, что они могут летать на большие расстояния. Постоянные магниты не имеют вторичных частей, поэтому эти системы в основном используются для приложений большой длины. Отсутствие магнитов во втором сегменте делает эти устройства недорогими, поскольку создание магнитной дорожки жизненно важно для цены устройства.
Подходит для тяжелых условий эксплуатации. Линейные асинхронные двигатели наиболее широко используются в линейных двигателях высокого давления, где требуется постоянное номинальное усилие ускорения около 25 г и сотни фунтов.
Недостатки
Системы LIM более сложны в разработке, поскольку требуют сложных алгоритмов управления.
На время службы усилили силы притяжения.
В состоянии покоя показывает небольшое усилие.
Увеличенный физический размер устройства требует большего размера корпуса.
Для доступности требуется больше мощности. КПД линейных двигателей с постоянными магнитами ниже, и они выделяют больше тепла.
Это требует интеграции оборудования водяного охлаждения в архитектуру.
II. Характеристики линейного асинхронного двигателя
Конечный эффект
По сравнению с круговыми асинхронными двигателями, LIM имеет функцию, известную как «Конечный эффект». Конечным результатом являются потери качества и выхода, которые вызваны отводом и понижением магнитной энергии в конце основной секции из-за относительного движения между первичной и вторичной секциями.
Только во вторичном сегменте система, как правило, обладает той же универсальностью, что и роторная машина, требуя, чтобы она была разнесена примерно на два полюса, но с минимальным основным уменьшением тяги, которое существует при малом скольжении, несмотря на тот факт, что она либо на 8 или более полюсов длиннее. Из-за характера концевых эффектов машины LIM не могут работать налегке, в то время как асинхронные двигатели общего назначения могут работать как двигатель с более близким синхронным полем в условиях низкой нагрузки. Для сравнения, линейные двигатели производят эквивалентные потери в результате конечного эффекта.
Тяга
Устройства LIM создают привод, который практически идентичен приводу обычных асинхронных двигателей. Даже если они модулируются конечными результатами, эти движущие силы имеют характеристическую кривую, очень похожую на скольжение. Тяговое усилие — еще один термин для этого. Это показано:
F = Pg/Vs
измеряется в ньютонах
Левитация
что приводит к существенно определенному расстоянию по мере увеличения скольжения в любом направлении. Это происходит только в односторонних двигателях, поскольку обычно этого не происходит, когда вторичный сегмент защищен железной опорной пластиной, поскольку это обеспечивает притяжение, которое преодолевает подъемную нагрузку.
Поперечный краевой эффект
Линейные асинхронные двигатели часто имеют поперечный краевой эффект, что означает, что пути тока в одном и том же направлении движения создают потери, минимизируя эффективную тягу. Как следствие, возникает поперечный краевой эффект.
Производительность
Эффективность линейного асинхронного двигателя можно рассчитать, используя принцип, описанный ниже, в котором синхронная скорость движущейся волны выражается как:
Vs = 2f (сердцевина линейного полюса) … …..м/с
‘f’ соответствует подаваемой частоте, измеренной в герцах
Скорость вторичной части роторного асинхронного двигателя в ЛАД меньше синхронной скорости и определяется как:
Vr = Vs (1-с), ‘ с ‘ — скольжение LIM, и оно равно
S = (Vs – Vr)/Vs
Линейная сила определяется как F = мощность воздушного зазора/Vs
Кривая скорости тяги LIM почти эквивалентна кривой зависимости скорости вращения асинхронного двигателя от крутящего момента. По сравнению с линейным асинхронным двигателем и роторным асинхронным двигателем линейный асинхронный двигатель требует большего воздушного зазора, что приводит к увеличению тока намагничивания и минимальной выходной мощности и коэффициенту мощности.
В RIM части статора и ротора имеют одинаковые участки, а в LIM один сегмент короче другого. Более короткий участок будет иметь более непрерывное прохождение, чем более длинный участок с постоянной скоростью.
III. Применение линейного асинхронного двигателя
В таких системах в основном используются линейные асинхронные двигатели.
Конвейерные ленты с алюминием
Управляющий механизм, который представляет собой электронную динамику
Высокоуровневые выключатели
Приложения для улучшения Shuttles
779696
Приложения для улучшения Shottles
7
.
Как работает линейный асинхронный двигатель?
Линейный асинхронный двигатель похож по конструкции на круговой двигатель, который открывается плоско. Магнитное поле теперь проходит по плоской поверхности двигателя, а не вращается. Статор обычно состоит из многофазной обмотки в многослойном железном сердечнике.
Что такое технология линейного двигателя?
Линейный двигатель представляет собой электродвигатель, у которого статор и ротор «развернуты», поэтому вместо создания крутящего момента (вращения) он создает линейную силу по всей своей длине. ... Высокоскоростные линейные двигатели обычно используются в исследованиях высокоскоростных столкновений, в качестве оружия или в качестве двигателей массы для движения космических кораблей.
В линейных асинхронных двигателях используются магниты?
Линейный асинхронный двигатель (LIM) представляет собой асинхронный линейный двигатель переменного тока (AC), который работает по тем же общим принципам, что и другие асинхронные двигатели, но обычно предназначен для непосредственного создания прямолинейного движения. Их практическое использование включает магнитную левитацию, линейные двигатели и линейные приводы.
Посмотреть больше
Подпишитесь на Utmel!
Популярные сообщения
UTMEL- Акция первой продажи
Что такое микроконтроллер?
Сколько транзисторов в процессоре?
Варистор: определение, назначение, работа и тестирование
Что такое переменный конденсатор?
Основы фоторезисторов: типы, принцип действия и применение
Структура и принцип работы полевых транзисторов
Что такое контроллер памяти?
Принцип работы и характеристики стабилитронов
Основы переключающих диодов: работа, типы и анализ схем
Сопутствующие детали
Более
Линейный асинхронный двигатель: работа, типы и применение
Линейный асинхронный двигатель (ЛИД): принцип работы, классификация, характеристики, преимущества, недостатки и области применения
Содержание
Что такое линейный асинхронный двигатель?
Асинхронный двигатель используется для преобразования электрической энергии в энергию вращения. Другой формой асинхронного двигателя является линейный асинхронный двигатель. Он используется для преобразования электрической энергии в линейное движение.
Линейный асинхронный двигатель известен как LIM. Он работает по принципу электромагнитной индукции. Этот тип двигателя наиболее популярен в тяговых приложениях. Подобно обычному асинхронному двигателю, линейный асинхронный двигатель также имеет две обмотки; первичная обмотка и вторичная обмотка. В большинстве случаев первичная обмотка состоит из меди, а вторичная — из алюминия.
Трехфазный асинхронный двигатель производит линейное поступательное движение, а однофазный асинхронный двигатель производит колебательное движение.
- Связанный пост: Асинхронный двигатель и линейные асинхронные двигатели Формулы и уравнения
Принцип работы линейного асинхронного двигателя
Принцип работы линейного асинхронного двигателя аналогичен принципу работы обычного асинхронного двигателя. Принцип заключается в том, что «когда между полем и проводниками короткого замыкания возникают относительные движения, в проводнике индуцируются токи. Проводник с током создает ЭДС (электродвижущую силу), и за счет этой силы проводник пытается двигаться таким образом, чтобы устранить наведенный ток (согласно закону Ленца).
В обычном асинхронном двигателе индуцированное магнитное поле по своей природе вращается. Следовательно, движение в проводнике также вращательное. Но в случае линейного асинхронного двигателя движение поля прямолинейно. Следовательно, движение проводника линейно.
При подключении трехфазного источника к первичной обмотке возникает бегущий поток. Этот поток распространяется по длине первичной части и индуцирует ЭДС во вторичной. Эта ЭДС циркулирует во вторичной обмотке. Этот индуцированный ток взаимодействует с бегущим потоком и создает силу.
Если одна часть (первичная или вторичная) является неподвижной, а вторая часть (вторичная или первичная) может двигаться, то на движущийся элемент будет воздействовать сила.
- Связанный пост: Дифференциальный трансформатор с линейной переменной
Тяговый локомотив с использованием LIM
Если первичная обмотка неподвижна, а вторичная подвижна, сила или тяга генерируется в том же направлении, что и бегущая волна. Точно так же, если вторичная обмотка закреплена, а первичная обмотка подвижна, сила или тяга генерируется в направлении, противоположном бегущей волне.
На приведенном ниже рисунке показан тяговый локомотив с подвижным первичным и неподвижным вторичным.
С помощью пантографа производится сбор однофазного питания с ВЛ. Это однофазное питание преобразуется в трехфазное с помощью преобразователя. Теперь это трехфазное питание подается на первичную обмотку трехфазного линейного асинхронного двигателя.
Из-за трехфазного питания в первичной обмотке создается бегущий поток, который связывает вторичную обмотку и создает ЭДС.
Эта ЭДС обеспечивает циркуляцию тока во вторичной обмотке. А за счет взаимодействия с первичным бегущим потоком и вторичным током на локомотиве создается тяга или сила, и он начинает движение.
Уравнение линейной синхронной скорости:
В S = 2 τf … м/с
Связанный пост:
- Однофазный асинхронный двигатель – конструкция, работа, типы1
- Трехфазный асинхронный двигатель – конструкция, работа, типы и применение
Классификация линейных асинхронных двигателей
В зависимости от конструкции линейные асинхронные двигатели делятся на два типа;
- Односторонний LIM
- Двусторонний ЛИМ
Односторонний ЛИМ
В одностороннем линейном асинхронном двигателе одна из двух (первичная или вторичная) обмотка неподвижна, а другая вращается. Следовательно, односторонний LIM можно разделить на два типа;
Подвижная первичная и фиксированная вторичная
Как следует из названия, первичная обмотка подвижна, а вторичная обмотка неподвижна. Этот тип двигателя имеет пазы в железном сердечнике первичной обмотки и его перемещения. Трехфазная обмотка размещена в пазах первичной обмотки.
На приведенном ниже рисунке показаны детали конструкции подвижного первичного и фиксированного вторичного одностороннего LIM.
Направление движения противоположно направлению бегущего потока.
Подвижная вторичная и фиксированная первичная
В одностороннем двигателе этого типа первичная обмотка неподвижна, а вторичная обмотка подвижна. В первичной обмотке имеются пазы и размещена трехфазная обмотка.
На приведенном ниже рисунке показаны детали конструкции подвижного вторичного и фиксированного первичного одностороннего LIM.
В этом типе двигателя направление движения совпадает с направлением бегущего потока.
Двухсторонний LIM
Двухсторонний LIM используется для тяговых целей. Особенно популярны подвижная первичная и фиксированная вторичная конструкции. На рисунке ниже показана конструкция двустороннего ЛИМ. На рисунке ниже показана конструктивная схема двустороннего ЛИМ.
Когда требуемое движение аналогично, расстояние между двумя пределами короче, чем первичный делается длиннее, чем вторичный.
Если расстояние больше основного, оно становится короче вторичного.
Двусторонний линейный асинхронный двигатель обеспечивает лучшие магнитные свойства, а сила, получаемая в этом двигателе, больше. Коэффициент мощности лучше из-за правильной магнитной связи (по сравнению с односторонним LIM). Но стоимость этого мотора больше.
Похожие сообщения:
- Характеристики крутящего момента-скольжения и крутящего момента-скорости асинхронного двигателя
- Регулирование скорости двигателя постоянного тока – методы регулирования напряжения, реостата и магнитного потока
Рабочие параметры LIM
Когда трехфазный симметричный источник питания подключен к первичной обмотке, создается линейное движущееся магнитное поле. Поле перемещается на расстояние двухполюсных шагов (2τ) за один цикл частоты питания (f).
Синхронная скорость линейного асинхронного двигателя определяется как;
В S = 2 τf … м/с
Где,
- τ = Шаг полюсов (м)
- f = Частота (Гц)
Подобно обычному асинхронному двигателю, первичный элемент движется в направлении, противоположном полю с фиксированным вторичным полем, со скоростью V. Тогда скольжение определяется как;
Из приведенного выше уравнения мы можем сказать, что синхронная скорость не зависит от количества полюсов, но зависит от шага полюсов.
Таким образом, изменение скорости достигается за счет регулировки шага полюсов τ. А тяга или сила определяется как;
Где,
- P = мощность, подводимая к двигателю (Вт)
- В с = линейная синхронная скорость (м/с)
Активная мощность P m определяется как механическая мощность и представляет собой мощность, развиваемую двигателем;
P m = P r ( 1 – s )
Аналогично обычному двигателю, КПД ротора определяется как;
Потери в меди ротора = sP f
Из-за большего воздушного зазора ток намагничивания большой, а коэффициент мощности низкий. Следовательно, КПД этого двигателя очень низкий.
Связанный пост:
- Уравнение мощности, напряжения и ЭДС двигателя постоянного тока
- Что такое КПД двигателя и как его повысить?
Преимущества и недостатки LIM
Преимущества
Ниже перечислены преимущества линейного асинхронного двигателя.
- Низкая начальная стоимость
- Низкие эксплуатационные расходы
- Нет перегрева
- Без ограничения максимальной скорости
- Отношение мощности к весу лучше, чем у обычного асинхронного двигателя
- Тяговое усилие не зависит от скорости
Недостатки
Недостатки линейных асинхронных двигателей перечислены ниже.
- Низкий коэффициент мощности
- Низкая эффективность
- В линейном асинхронном двигателе воздушный зазор больше, чем в обычном асинхронном двигателе. Поэтому возникает большой ток намагничивания.
- Стоимость рельса, закрепленного по осевой линии пути, очень высока.
- Это вызывает трудности при переходе, поэтому для перехода необходимы другие условия.
Применение линейных асинхронных двигателей
Ниже перечислены области применения линейных асинхронных двигателей.
- Этот тип двигателя широко используется в качестве тягового двигателя.
- Металлические ленточные конвейеры
- Операции с раздвижными дверями
- Для транспорта (средне- и высокоскоростные автомобили)
- В депо для маневровых работ
- Электромагнитные насосы
Related Posts:
- Типы электродвигателей – Классификация двигателей переменного и постоянного тока и специальных двигателей
- Применение электродвигателей
- Пускатель двигателя – типы пускателей двигателя и методы пуска двигателя
- Пускатель прямого действия — схема подключения пускателя DOL для двигателей
- Расчет размера кабеля для двигателей LT и HT
- Методы управления скоростью двигателя постоянного тока
- Машина постоянного тока – конструкция, работа, типы и применение
- Серводвигатель – типы, конструкция, работа, управление и применение
- Бесщеточный двигатель постоянного тока (BLDC) – конструкция, принцип работы и применение
- – типы, конструкция, работа и применение
- Что такое КПД двигателя и как его повысить?
- Асинхронный двигатель и линейные асинхронные двигатели Формулы и уравнения
- Что такое мотор-генератор и как он работает?
- Как запустить трехфазный асинхронный двигатель от однофазного источника питания?
- Формулы и уравнения в области электротехники и электроники
- Символы электродвигателей
Шаговый двигатель
Показать полную статью
Связанные статьи
Кнопка «Вернуться к началу»
Линейные двигатели: время для откровенного разговора
Линейное движение требуется для всех видов промышленных систем и оборудования, от станков и конвейерных лент до решений для сканирования и печати. Обычный двигатель, соединенный с подходящим компонентом механического привода, обычно способствует этому прямолинейному движению. Но что, если бы существовала концепция, позволяющая сделать линейное движение более эффективным за счет использования прямого привода? Ну, есть. Линейные двигатели неуклонно завоевывают долю промышленного рынка в течение последних двух десятилетий. Для тех, кто хочет узнать больше, читайте дальше.
Как работают линейные двигатели?
Линейный двигатель обеспечивает прямую связь с нагрузкой. Этот принцип прямого привода основан на использовании силы магнитного поля для перемещения катушки вдоль дорожки постоянных магнитов. Чтобы визуализировать эту конфигурацию, представьте тип электромагнитной «рейки и шестерни», где шестерня — это вращающееся магнитное поле, а рейка — это статические постоянные магниты. Притяжение и отталкивание, возникающие между катушками и дорожкой постоянного магнита, создают необходимое движение.
Источник: Tecnotion
Чтобы объяснить немного подробнее, переменный трехфазный ток проходит через катушки, создавая вращающееся (или «поступательное» в случае линейного двигателя) электромагнитное поле. Это электромагнитное поле взаимодействует с постоянным магнитом, и результирующая сила в конечном итоге приводит к преобразованию электрической энергии в линейную механическую энергию с высоким уровнем эффективности. Скорость изменения тока определяет скорость движения, а сила тока определяет генерируемую силу.
Линейные двигатели в работе не отличаются от роторных двигателей, но в том смысле, что они открываются и раскатываются в плоском виде. Ротор с действующими постоянными магнитами становится неподвижной частью линейного двигателя, а статор (с катушками) становится подвижной частью.
Основные преимущества
Одним из основных преимуществ линейных двигателей является устранение так называемых «эластичных» компонентов трансмиссии, таких как редукторы и муфты, которые могут привести к таким проблемам, как люфт и ошибка движения/резонанса. В результате пропускная способность и жесткость системы движения могут быть намного выше, обеспечивая лучшую воспроизводимость и точность.
Другим значительным преимуществом является устранение необходимости в системах кинематического привода, таких как шарико-винтовые пары, ремни и шкивы, червячные передачи и системы реечной передачи, которые необходимы традиционным двигателям для преобразования вращательного движения в поступательное. Таким образом, линейные двигатели обеспечивают гораздо более высокую эффективность и точность позиционирования даже на высоких скоростях, одновременно обеспечивая очень плавное регулирование скорости с низкой пульсацией.
В отличие от щеточных двигателей, в прямом приводе нет контакта между движущимися частями. Благодаря отсутствию механического износа пользователи станков могут наслаждаться образцовой надежностью и сроком службы. TCO (общая стоимость владения) также снижается по сравнению с традиционными решениями.
Еще одним важным фактором является пространство. Поскольку подвижная часть линейного двигателя соединяется непосредственно с нагрузкой, это может сэкономить место и упростить конструкцию машины, что представляет собой большое преимущество как для разработчиков систем, так и для пользователей.
Параметры выбора
При выборе линейного двигателя для конкретного применения необходимо учитывать множество факторов, включая требования к динамическим характеристикам машины или системы. На первый план часто выходят такие параметры процесса, как рабочий цикл, пиковое усилие и максимальная скорость.
Доступны два основных типа линейных двигателей. Любое приложение с небольшой полезной нагрузкой, которое требует чрезвычайно точных движений или очень высокого ускорения, обычно использует преимущества линейного двигателя без железа. Однако для приложений, требующих высокой продолжительности рабочего цикла, линейные двигатели с железным сердечником создают большую непрерывную силу.
Линейные двигатели с железным сердечником
Конструкция линейных двигателей с железным сердечником предусматривает установку обмоток катушек внутри набора стальных пластин для усиления создаваемого электромагнитного потока. Этот тип линейного двигателя обеспечивает чрезвычайно высокое постоянное усилие и хорошее рассеивание тепла для своего размера, что делает его идеальным для применений, связанных с большими полезными нагрузками. Примеры включают станки, выполняющие фрезерные, токарные, штамповочные, формовочные и лазерные операции, а также оборудование для текстильного производства.
Одним из недостатков, который многие инженеры связывают с двигателями с железным сердечником, является зубчатое зацепление, паразитная сила, возникающая из-за создания (постоянными магнитами) флуктуирующей силы притяжения к магнитным материалам, таким как железо. Короче говоря, железный сердечник имеет «предпочтительные» положения по отношению к магнитам, поэтому двигатель должен изменять силу тяги, чтобы преодолевать эти положения, что приводит к неплавному «зубчатому» движению.
Однако современные решения с оптимизированной конструкцией железного сердечника ограничивают эту историческую проблему, обеспечивая низкую производительность. Например, некоторые линейные двигатели имеют магниты, которые не ортогональны направлению движения, а вместо этого установлены с небольшим углом наклона, что помогает сгладить движение в достаточной степени для решения большого количества обычных промышленных применений.
Линейные двигатели без сердечника
В линейных двигателях без сердечника нет силы притяжения или зубчатого зацепления между катушкой и магнитной дорожкой. В результате безжелезные варианты обеспечивают отсутствие силы пульсации, высокую точность, постоянную линейную силу, а также высокую скорость и ускорение. Кроме того, в 95% случаев безжелезные линейные двигатели работают за счет перемещения более легкой катушки, что помогает достичь более динамичного движения и постоянной скорости. Чрезвычайно тонкая форма вариантов без железа также выгодна, поскольку она предоставляет машиностроителям гибкие варианты монтажа.
Возможности применения линейного двигателя этого типа широки и разнообразны; по сути, любая машина или система, перемещающая небольшую массу с высокой скоростью и высокой точностью. Примеры включают решения для производства полупроводников, испытательные машины, столики для микроскопов или инспекций, а также автоматизированное оборудование для медицинских или медико-биологических лабораторий.
Заключение
Существует множество причин, по которым в последние годы резко возросло использование линейных двигателей. Мало того, что этот тип двигателя обеспечивает высокую мощность в широком диапазоне скоростей, его доступность в широком диапазоне размеров делает его легко адаптируемым для большинства применений. В конечном счете, выбор линейного двигателя обеспечит эффективную и действенную безредукторную сборку в интересах как машиностроителей, так и пользователей.
Для получения рекомендаций по выбору линейного двигателя в зависимости от конкретного применения всегда обращайтесь к специалисту по предоставлению комплексных системно-интегрированных решений. Этот фактор важен, поскольку машиностроители должны учитывать не только линейный двигатель, но и линейный энкодер (для обратной связи) и сервопривод, которые должны иметь такой же высокий уровень технических характеристик, чтобы обеспечить точное и плавное движение.
Линейный асинхронный двигатель
— конструкция, схема, принцип работы, области применения и характеристики
В этой теме вы изучаете линейный асинхронный двигатель — конструкция, схема, принцип работы, области применения и характеристики.
Линейный асинхронный двигатель — это особый тип асинхронного двигателя, предназначенный для обеспечения линейного движения на основе принципа «всякий раз, когда происходит относительное движение между возбуждением и короткозамкнутыми проводниками, индуцируются токи, что приводит к возникновению электромагнитных сил, которые перемещают проводник в противоположном направлении». направление».
Рисунок 1: Линейный асинхронный двигатель.
Линейный асинхронный двигатель состоит из статора и ротора, причем обе части являются подвижными. Статор и ротор разделены воздушным зазором. Обычно статор называют первичным, а ротор – вторичным. Статор состоит из магнитопровода с трехфазной обмоткой, размещенной в пазах, а ротор представляет собой металлический лист из меди (или) алюминия. Разрез линейного асинхронного двигателя показан на рисунке 1.
Конструктивные особенности линейного асинхронного двигателя
Линейный асинхронный двигатель представляет собой особый тип многофазного асинхронного двигателя, в котором статор (первичный) и ротор (вторичный) разрезаны радиальной плоскостью, а затем развернуты (рис. 2 (а) и (б)) так, что вместо создавая крутящий момент (вызывая вращение), он создает линейную силу (вызывая линейное движение) по своей длине. В принципе, существует столько же различных типов линейных электродвигателей, сколько и вращающихся электрических машин. Однако наибольшей популярностью пользуются линейные электродвигатели асинхронного типа.
Рис. 2: (a) Обычный трехфазный асинхронный двигатель с короткозамкнутым ротором цилиндрической формы, (b) Примитивный линейный асинхронный двигатель.
В своей простейшей форме линейный асинхронный двигатель состоит из системы возбуждения с трехфазной распределенной первичной обмоткой, размещенной в пазах. Полевая система может иметь один или два основных цвета, как показано на рис. 3 (а) и (б) или (в) и (г) соответственно. Линейный асинхронный двигатель с одной первичной обмоткой называется односторонним линейным асинхронным двигателем (SLIM), тогда как линейный асинхронный двигатель с двумя первичными обмотками называется двусторонним линейным асинхронным двигателем (DSLIM). Вторичная обмотка линейного асинхронного двигателя обычно представляет собой проводящую пластину из меди или алюминия. В одностороннем линейном асинхронном двигателе ферромагнитная пластина обычно размещается на другой стороне проводящей пластины, чтобы обеспечить путь с низким сопротивлением для основного потока. В зависимости от применения линейный асинхронный двигатель может иметь короткую первичную обмотку (рис. 3 (а) и (б)) или короткую вторичную обмотку (рис. 2 (в) и (г)). В отличие от многофазного асинхронного двигателя линейный асинхронный двигатель может иметь подвижную первичную обмотку с фиксированной вторичной обмоткой или подвижную вторичную обмотку с фиксированной первичной обмоткой.
Рис. 3: Схематическое изображение (a) Односторонний линейный асинхронный двигатель с короткой первичной обмоткой, (b) Двухсторонний линейный асинхронный двигатель с короткой первичной обмоткой, (c) ) Односторонний линейный асинхронный двигатель с короткой вторичной обмоткой, (d) Двухсторонний линейный асинхронный двигатель с короткой вторичной обмоткой
Принцип действия линейного асинхронного двигателя
Когда первичная обмотка линейного асинхронного двигателя возбуждается от сбалансированного трехфазного питания, создается линейно бегущее поле. Скорость (линейная) этого поля определяется выражением
\[{{\text{v}}_{\text{1}}}\text{= 2f}\left( \text{полюс-шаг} \right )\text{ = f}\lambda \text{ м/с}\]
где $\text{ }\!\!\lambda\!\!\text{ }$ — длина волны бегущего поля и равно двум шагам полюсов.
Это линейно бегущее поле индуцирует вихревые токи во вторичной обмотке. Взаимодействие между первичным и вторичным полями приводит к возникновению линейной силы, тем самым отталкивая вторичное (если оно подвижно) от первичного и увлекая его в направлении линейно движущегося магнитного поля. Как и в случае обычного асинхронного двигателя, скорость (линейная), с которой движется вторичный элемент, меньше ${{\text{v}}_{\text{1}}}$ и равна
\[\text{v }\text{ }\!\!~\!\!\text{ }\text{ = }{{\text{v}}_{\text{1}}}\left ( \text{l – S} \right)\text{ м/с}\]
Тяговая характеристика линейного асинхронного двигателя
В случае линейного асинхронного двигателя сила, вызывающая линейное движение, равна называется тягой. Характеристика тяги-скорости линейного асинхронного двигателя показана на рис. 4. Она аналогична характеристике крутящего момента-скорости обычного асинхронного двигателя.
Рис. 4: Тягово-скоростная характеристика линейного асинхронного двигателя
Применение линейного асинхронного двигателя
Существует множество применений линейных асинхронных двигателей. Некоторые из них перечислены ниже:
Система запуска самолетов, вооружение, американские горки, челночные движители, запорные клапаны, индукционные мешалки для расплавленных металлов, автоматические раздвижные двери в электропоездах, конвейеры, тягачи, электромагнитные насосы, передвижные краны, высокие -скоростная тяга, разгон легковых и грузовых автомобилей для краш-тестов в помещении, приводы для h. v. автоматические выключатели, ударные экструдеры для металлов и т. д.
Принцип работы линейного асинхронного двигателя
Привет друзья, в этой статье я собираюсь описать принцип работы линейного асинхронного двигателя . В этой статье вы найдете ответы на различные вопросы о LIM.
Линейный асинхронный двигатель представляет собой усовершенствованный вариант цилиндрического асинхронного двигателя. Это особый тип асинхронного двигателя, который обеспечивает линейное движение вместо вращательного, как в случае обычного асинхронного двигателя.
Если асинхронный двигатель на рисунке (A) разрезать по оси и разложить, как показано на рисунке (B), он соответствует линейному асинхронному двигателю (LIM).
Вторичный проводник теперь отображается в виде листа. Обычно это проводящая пластина из меди или алюминия, в которой индуцируются токи взаимодействия.
Мобильными можно сделать основной или дополнительный сервер. Неподвижный элемент, конечно, должен быть непрерывным на всем протяжении предполагаемого перемещения.
Магнитное притяжение между элементами может быть уравновешено во вращающейся машине, но не может быть легко уравновешено в плоской машине. Чтобы сбалансировать магнитное притяжение, первичная обмотка расположена по обе стороны от вторичной (рис. C). Эта конструкция обычно используется для тяги.
Первичная обмотка имеет трехфазную распределенную обмотку, размещенную в пазах. Он работает по тому же принципу, что и цилиндрический асинхронный двигатель.
При питании первичной обмотки ЛАД от трехфазного источника создается магнитное поле, движущееся по прямой от одного конца к другому с линейной синхронной скоростью V с .
Линейная синхронная скорость определяется как:
В с = 2 тс м/с
Где t = шаг полюсов в метрах.
f = частота сети.
Здесь следует отметить, что синхронная скорость не зависит от количества полюсов, и поэтому любая желаемая линейная скорость может быть достигнута путем регулировки шага полюсов.
Поскольку поток движется линейно, он индуцирует токи в пластине ротора. Индуцированные токи, взаимодействуя с полем, создают тягу на пластине ротора и вовлекают пластину ротора в том же направлении. Это основной «принцип работы линейного асинхронного двигателя».
Как и цилиндрический асинхронный двигатель, LIM также работает со скоростью меньше синхронной. Он не может работать на синхронной скорости. Причины те же, что и в случае цилиндрического асинхронного двигателя.
Скольжение линейного асинхронного двигателя, s = (v s – v)/v s
Тяговое усилие или тяга F можно регулировать, изменяя как частоту, так и напряжение, так что плотность индукции остается постоянной.
Поперечный краевой эффект и торцевой эффект
Есть два особых эффекта, которые возникают в LIM, но не в цилиндрическом асинхронном двигателе. Эти эффекты представляют собой поперечный краевой эффект и торцевой эффект.
Путь индуцированного тока во вторичной обмотке определен нечетко, поскольку вторичная обмотка ЛАД представляет собой сплошную проводящую пластину. Часть путей тока, параллельных направлению движения вторичного контура, не создает полезной тяги, а только способствует потерям.
Это известно как поперечный краевой эффект в линейном асинхронном двигателе, потому что пути тока, параллельные направлению движения, больше проходят по краям проводящей пластины.
В ЛАД с короткой первичной обмоткой пути тока к концу структуры поля на проводящей пластине выходят за пределы структуры поля, и такие участки путей тока не создают полезной тяги, а только способствуют потерям в двигателе. Это известно как концевой эффект в линейном асинхронном двигателе. Его можно эффективно уменьшить, увеличив число полюсов двигателя.
Применение линейного асинхронного двигателя
- Линейный асинхронный двигатель обычно используется для тяги, при которой первичная часть конечной длины осуществляется на транспортном средстве, а вторичная часть имеет форму непрерывного токопроводящего рельса (используется алюминий).
- LIM имеет преимущество перед цилиндрическим асинхронным двигателем для скорости более 200 км/ч. Он обеспечивает отличный источник движущей силы для поездов с магнитной подвеской, где цилиндрический асинхронный двигатель выходит из строя.
- Используется в автоматических раздвижных дверях.
- Может использоваться в конвейерах, мостовых кранах, самосвалах и т. д.
- Использование LIM до сих пор ограничено лишь несколькими приложениями из-за конструктивных трудностей и экономических соображений.
Преимущества и недостатки линейного асинхронного двигателя
Преимущества линейных асинхронных двигателей:
- Низкая начальная стоимость.
- Низкие затраты на обслуживание благодаря отсутствию вращающихся частей.
- Нет ограничения максимальной скорости из-за центробежных сил.
- Нет перегрева ротора.
- Отношение мощности теста к весу.
Недостатками линейных асинхронных двигателей являются:
- Типичный воздушный зазор в ЛАД составляет порядка 25 мм, в то время как в цилиндрическом двигателе он составляет около 1 мм, т. е. он имеет больший воздушный зазор, что приводит к снижению коэффициента мощности. .
- LIM имеет гораздо более высокое сопротивление ротора, работает с большим скольжением при заданной тяге и, соответственно, имеет низкий КПД.
- Очень высокие капитальные затраты на реактивный рельс, закрепленный вдоль центральной линии пути.
Спасибо, что прочитали о принципе работы линейного асинхронного двигателя .
Трехфазный асинхронный двигатель | Все сообщения
- Конструкция трехфазного асинхронного двигателя
- Вращающееся магнитное поле в трехфазном асинхронном двигателе
- Принцип работы трехфазного асинхронного двигателя
- Скольжение асинхронного двигателя
- Формула крутящего момента для асинхронного двигателя
- Характеристики проскальзывания крутящего момента асинхронного двигателя
- Потери в асинхронном двигателе
- Испытания асинхронных двигателей
- Способы пуска асинхронного двигателя
- Двойной асинхронный двигатель с короткозамкнутым ротором
- Регулятор скорости трехфазного асинхронного двигателя
- Что такое частотно-регулируемый привод?
- Принцип работы стартера автотрансформатора
- Тепловое реле перегрузки работает
- Эквивалентная схема асинхронного двигателя
© www. yourelectricalguide.com/ Принцип работы линейного асинхронного двигателя.
ПОИСК В ЭТОМ БЛОГЕ
Ищи:
КАТЕГОРИИ
КАТЕГОРИИвыберите категориюОсновы переменного тока (8)Основные понятия (14)Аккумуляторы (8)Автоматические выключатели (9)Двигатели постоянного тока (8)Электроизмерительные приборы (14)Электромагнетизм (6)Электроника (12)Гостевой пост (4)Приборные трансформаторы ( 4)Инструментарий (29)MCQ (99)Электростанции (11)Однофазные двигатели (5)Синхронные машины (7)Трехфазный асинхронный двигатель (18)Трансформатор (23)Система передачи (19)Без категории (21)Использование электрической энергии (10)
СВЯЖИТЕСЬ С НАМИ
[адрес электронной почты защищен]
БЫСТРЫЕ ССЫЛКИ
Главная
О нас
Подача гостевых сообщений
Скачать бесплатные книги в формате PDF
Грамматика английского языка 4 Все
E Notes 4U
сообщить об этом объявлении
Строительство, работа и ее применение
Асинхронный двигатель — это обычно используемый электродвигатель переменного тока. В этом двигателе электрический ток, необходимый в роторе для создания крутящего момента, достигается за счет электромагнитной индукции от вращающегося магнитного поля обмотки статора. Ротор этого двигателя может быть с обмоткой или с короткозамкнутым ротором. Асинхронные двигатели также называют «асинхронными двигателями», потому что они работают с меньшей скоростью по сравнению с их синхронной скоростью. На рынке доступны различные типы асинхронных двигателей, и особый тип асинхронного двигателя известен как линейный асинхронный двигатель или LIM. Итак, в этой статье обсуждается обзор линейный асинхронный двигатель – работа с приложениями.
Тип асинхронного двигателя, который используется для достижения линейного движения вместо вращательного движения путем изменения подачи электрической энергии на линейное движение, известен как линейный асинхронный двигатель. Статор и ротор в этом асинхронном двигателе называются соответственно первичным и вторичным. Схема линейного асинхронного двигателя показана ниже.
Линейный асинхронный двигатель
Вторичная обмотка этого двигателя включает ровный алюминиевый проводник через ферромагнитный сердечник. Если первичная обмотка этого асинхронного двигателя подключена к 3-фазному источнику питания, то сигнал бегущего потока может генерироваться по всей длине первичной обмотки. Из-за относительного движения алюминиевого проводника и сигнала бегущего потока в алюминиевом проводнике может индуцироваться ток.
Таким образом, этот индуцированный ток также генерирует волну магнитного потока, которая передается через сигнал бегущего потока первичной обмотки для создания линейной силы. Если вторичная обмотка двигателя постоянна, а первичная обмотка может свободно перемещаться, после этого сила будет перемещать первичную обмотку в направлении волны бегущего потока.
Принцип работы
Принцип работы линейного асинхронного двигателя связан с этим 3-фазным асинхронным двигателем, однако в случае линейного асинхронного двигателя неподвижная часть, такая как статор, плоская или развернутая, в результате чего он создает линейные силы посредством своих длина.
Конструкция линейного асинхронного двигателя
Ниже показана конструкция линейного асинхронного двигателя, которая включает ротор и статор, разделенные воздушным зазором. Как правило, в этом двигателе статор называется первичной катушкой, тогда как ротор называется вторичной катушкой (реактивной пластиной). Статор в этом двигателе включает магнитопровод с трехфазной обмоткой, расположенной в пазах. Ротор представляет собой металлический лист из алюминия или меди, в котором индуцируется ток.
Конструкция линейного асинхронного двигателя
Ширина реактивной пластины должна быть эквивалентна размеру сборки катушки. Магнитное притяжение между реакционной пластиной и узлом катушки может быть уравновешено двусторонней первичной конструкцией.
Рабочий
Линейный асинхронный двигатель работает аналогично вращательному двигателю, но линейный асинхронный двигатель был разрезан и развернут для создания линейного движения, а не вращательного движения. Этот двигатель состоит из двух частей: первичной и вторичной.
После подачи питания на двигатель они будут взаимодействовать друг с другом, но первичный должен быть зафиксирован, пока вторичный движется.
Если на первичную обмотку этого двигателя подается трехфазное питание, то может генерироваться магнитный поток, который будет перемещаться по всей длине первичной обмотки. Таким образом, из-за движения этого магнитного потока внутри проводника будет возникать ток. Этот проводник выполнен из алюминия внутри вторичного линейного асинхронного двигателя.
Ток, индуцируемый во вторичной обмотке этого двигателя, будет взаимодействовать с бегущим потоком и создавать линейную силу или линейное движение. Если вторичная обмотка в двигателе зафиксирована, а первичная движется, то сила будет перемещать первичную обмотку по направлению к бегущей волне.
Как мы уже говорили, 3-фазное питание подается на обмотку статора, после чего может формироваться магнитное поле. Таким образом, это поле движется с линейной синхронной скоростью, которую можно определить как
Vs = 2τf м/с
Где
«τ» — шаг полюса в метрах.
‘f’ — частота в Гц.
Здесь синхронная скорость не определяется количеством полюсов, и любая предпочтительная линейная скорость может быть достигнута путем изменения шага полюсов. Когда поток движется линейно, он индуцирует токи внутри пластины ротора. Таким образом, индуцированные токи, взаимодействующие через поле, создают тягу на пластине ротора и тянут пластину ротора в том же направлении.
Подобно цилиндрическому асинхронному двигателю, этот асинхронный двигатель также работает на скорости ниже синхронной, поскольку не может работать на синхронной скорости. Когда этот двигатель является асинхронным или асинхронным, скорость вторичной обмотки невелика при синхронной скорости. Основное различие между этими двумя скоростями называется скольжением. Таким образом, скольжение линейного асинхронного двигателя можно определить как
Скольжение линейного асинхронного двигателя (s) = (vs – v)/vs
Здесь линейную силу или тягу можно контролировать, просто изменяя как напряжение, так и частоту, поэтому что плотность индукции останется постоянной.
Характеристики
Характеристики линейного асинхронного двигателя включают следующее.
Скорость и тяга Характеристики линейного асинхронного двигателя
В линейном асинхронном двигателе сила, создающая линейное движение, называется тягой. Здесь характеристики силы тяги LIM показаны ниже. Эти характеристики аналогичны характеристикам крутящий момент-скорость обычных асинхронных двигателей.
Всякий раз, когда этот двигатель выходит из неактивного состояния и разгоняется до синхронной скорости, сила тяги достигает максимума на скорости поступательного движения, а затем падает. Это связано с тем, что разница в магнитном потоке в алюминиевом листе уменьшается, когда разница в магнитном поле, создаваемом катушкой, достигает синхронной скорости. давайте посмотрим
Зачем использовать LIM?
LIM подходят для приложений, требующих высокоточного перемещения с низким энергопотреблением на большие расстояния и высоких скоростей. Они идеально подходят для приложений автоматизации и робототехники, а также для требований, требующих перемещения чего-либо с точностью, но не с большим усилием, например, перемещение объектов из одного места в другое или их точное позиционирование по отношению к другим объектам (таким как при работе с оборудованием для производства полупроводников).
В чем разница между линейным асинхронным двигателем и обычным асинхронным двигателем?
Линейные асинхронные двигатели имеют магнитный сердечник, прикрепленный к статору, что помогает сохранять соосность с ротором. Это означает, что нет необходимости во внешнем источнике питания или системе управления, чтобы поддерживать правильное выравнивание ротора со статором. Кроме того, поскольку нет необходимости в щетках или контактных кольцах, линейные асинхронные двигатели намного проще, чем стандартные асинхронные двигатели.
Требуется ли техническое обслуживание асинхронного двигателя?
Нет, асинхронный двигатель не требует обслуживания.
Преимущества
К преимуществам линейного асинхронного двигателя относятся следующие.
- Эти моторы не дорогие.
- Простая конструкция.
- Стоимость обслуживания меньше из-за отсутствия вращающихся частей.
- Нет ограничения максимальной скорости из-за центробежных сил.
- Они используются в приложениях большой длины, поскольку не имеют второстепенных деталей.
К недостаткам линейных асинхронных двигателей относятся следующие.
- Этот двигатель имеет больший воздушный зазор, который обычно составляет 25 мм, что приводит к меньшему коэффициенту мощности.
- Этот двигатель имеет более высокое сопротивление ротора.
- Больший воздушный зазор и немагнитная реактивная рейка требуют большего тока намагничивания, что приводит к низкому коэффициенту мощности и низкой эффективности.
- По оценке обычного роторного асинхронного двигателя, этому двигателю требуется больший воздушный зазор.
- Этот двигатель потребляет больший ток намагничивания, чем роторный асинхронный двигатель с аналогичными характеристиками.
- Коэффициент мощности и КПД ниже, чем у обычного асинхронного двигателя с такими же характеристиками.
- Увеличенный физический размер устройства требует большего размера пакета.
- Эффективность этого двигателя низкая, и они выделяют больше тепла.
Применения
Применения линейных асинхронных двигателей включают следующее.
- Подходит для тяжелых условий эксплуатации.
- Эти двигатели наиболее широко используются в приложениях с высоким давлением, где необходимы стабильные номинальные усилия с ускорением почти 25 г и сотнями фунтов.
- Основным применением асинхронного двигателя этого типа является транспортировка везде, где первичная часть расположена на транспортном средстве, а вторичная проложена по пути.
- Они помогают перемещать материалы в кранах.