Содержание
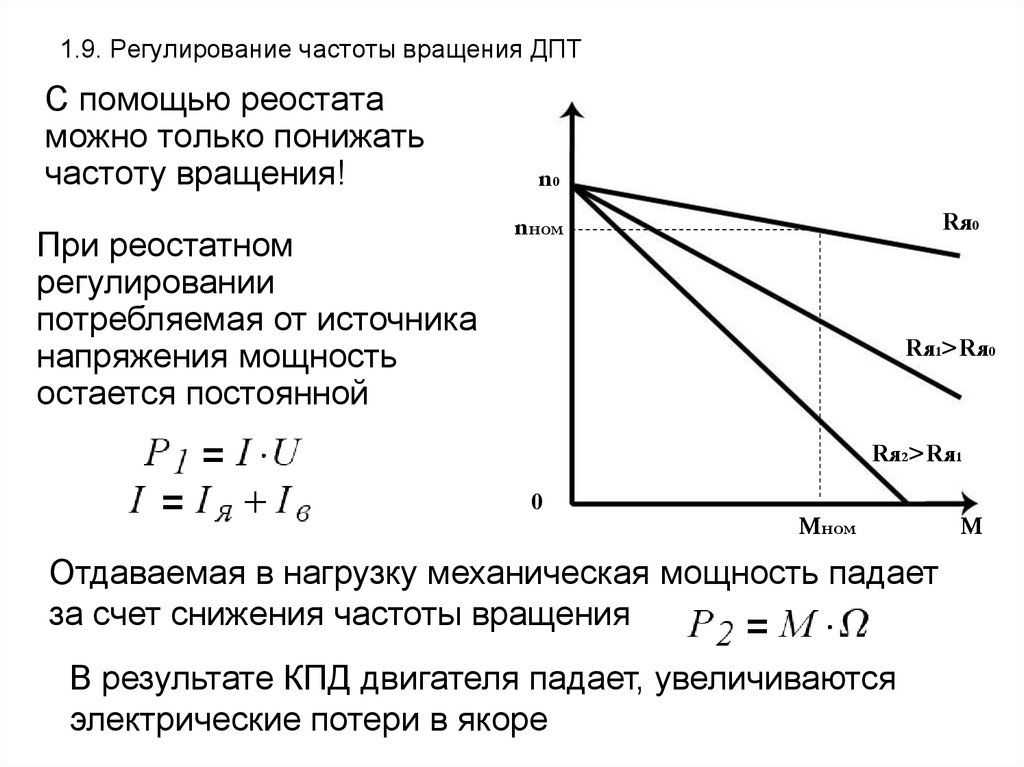
6.8 Потери и кпд машин постоянного тока
При
работе генератора (или двигателя)
постоянного тока полезная (выходная)
мощность, отдаваемая машиной, всегда
меньше подводимой от первичного
двигателя (или сети) за счет наличия
нескольких видов потерь мощности.
Электрические
потери возникают
в обмотке якоря, в обмотке возбуждения,
обмотке добавочных полюсов и в щеточном
контакте.
Потери
в стали
складываются из потерь на перемагничивание
(гистерезис) и вихревые токи в стальном
сердечнике якоря при его вращении в
постоянном магнитном поле.
Механические
потери
обусловлены потерями на трение в
подшипниках, щеток о коллектор, потерями
на вентиляцию и составляют от (1…4)%.
Добавочные
потери
обусловлены потерями в стали полюсных
наконечников от пульсации магнитного
потока при вращении зубчатого якоря,
и составляют 1% от отдаваемой мощности
для генераторов и 1% от потребляемой
мощности для двигателей.
КПД
машины определяется отношением полезной
мощности Р2
к потребляемой мощности Р1
и
составляется: для генераторов
(6.2) |
где
UI –
мощность, отдаваемая потребителю; ∑∆Р
– суммарные потери.
Для двигателей
(6.3) |
где
UI
– мощность, потребляемая двигателем
от сети.
КПД
машины постоянного тока зависит от
нагрузки (рисунок 6.9) и при номинальной
мощности составляет от 75 до 95%.
Рисунок
6. 9 – Зависимость КПД машины постоянного
9 – Зависимость КПД машины постоянного
тока от нагрузки
7 Асинхронные и синхронные машины
Лекция
7
Цель
лекции: Ознакомление
с устройством, принципом действия,
режимами работы и основными характеристиками
асинхронных и синхронных машин.
Асинхронные машины
7.1. Устройство асинхронных машин
Асинхронные
машины являются самым распространенным
видом бесколлекторных электрических
машин переменного тока. Асинхронная
машина – машина переменного тока, у
которой в установившемся режиме
магнитное поле статора, участвующее в
основном процессе преобразования
энергии, и ротор вращаются с разными
скоростями.
Преобладающее
применение имеют асинхронные
двигатели,
составляющие основу современного
электропривода: привод устройств
автоматики, бытовые электроприборы,
привод крупного горного оборудования.
Асинхронные
двигатели могут быть как однофазными,
так и трехфазными. Кроме асинхронных
Кроме асинхронных
двигателей, преобразующих электрическую
энергию переменного тока в механическую
энергию, имеются асинхронные машины,
выполняющие функции преобразователя
частоты, регулятора напряжения и
фазорегулятора.
Асинхронный
двигатель состоит из двух частей,
разделенных воздушным зазором:
неподвижного статора
и вращающегося ротора.
Каждая из этих частей имеет сердечник
и обмотку. Обмотка статора включается
в сеть и является первичной, а обмотка
ротора – вторичной, так как энергия в
нее поступает из обмотки статора за
счет магнитной связи между этими
обмотками. По конструкции асинхронные
двигатели разделяются на двигатели: с
короткозамкнутым ротором
и двигатели с
фазным ротором.
Двигатели
трехфазного асинхронного двигателя с
короткозамкнутым ротором,
(рисунок
7.1) имеют наиболее широкое применение.
Статор
состоит из
корпуса и сердечника с трехфазной
обмоткой. Каждая фазная обмотка состоит
Каждая фазная обмотка состоит
из одной или нескольких катушечных
групп, которые располагаются по
окружности статора на одинаковом
расстоянии друг от друга. Фазные обмотки
соединяются треугольником или звездой
и подключаются к трехфазной сети. Корпус
двигателя отливают из алюминиевого
сплава или из чугуна. Поверхность
корпуса имеет продольные ребра для
охлаждения двигателя. В корпусе
расположен
сердечник
статора, имеющий шихтованную конструкцию:
отштампованные листы из тонколистовой
электротехнической стали толщиной 0,5
мм покрыты слоем изоляционного лака,
собраны в пакет и скреплены скобами
или сварными швами. Такая конструкция
уменьшает вихревые токи, возникающие
в процессе перемагничивания сердечника
вращающимся магнитным полем. На
внутренней поверхности сердечника
статора имеются продольные пазы, в
которых расположены пазовые части
обмотки статора, соединенные лобовыми
частями.
В
расточке статора расположен ротор,
состоящий из вала и сердечника с
обмоткой, представляющей собой
алюминиевые или медные стержни,
расположенные в пазах сердечника ротора
и замкнутые с двух сторон короткозамыкающими
кольцами. Сердечник ротора также имеет
Сердечник ротора также имеет
шихтованную конструкцию, но листы
ротора не покрыты изоляционным лаком,
а имеют на своей поверхности тонкую
пленку окисла.
Другая
разновидность трехфазных асинхронных
двигателей – двигатели
с фазным ротором –
конструктивно
отличается устройством ротора, который
имеет более сложную конструкцию. На
валу ротора закреплен шихтованный
сердечник с трехфазной обмоткой,
выполненной аналогично обмотке статора.
Эту обмотку соединяют звездой, а ее
концы присоединяют к трем контактным
кольцам, на которые накладывают по две
щетки, располагаемые в щеткодержателях
на валу. Асинхронные двигатели с фазным
ротором имеют более сложную конструкцию
и менее надежны, но обладают лучшими
регулировочными и пусковыми свойствами.
Рисунок
7.1. Асинхронный двигатель с короткозамкнутым
ротором:
1
– вал; 2, 6 – подшипники; 3, 7 – подшипниковые
щиты; 4 –коробка выводов; 5, 8 – вентилятор
и его кожух; 9 – сердечник ротора с
короткозамкнутой обмоткой; 10 – сердечник
статора с обмоткой; 11– корпус; 12 – лапы
Коэффициент полезного действия машины постоянного тока
Общие положения
Коэффициент полезного действия определяется как отношение полезной, или отдаваемой, мощности P2 к потребляемой мощности P1:
| (1) |
или в процентах
| (2) |
Современные электрические машины имеют высокий коэффициент полезного действия (к.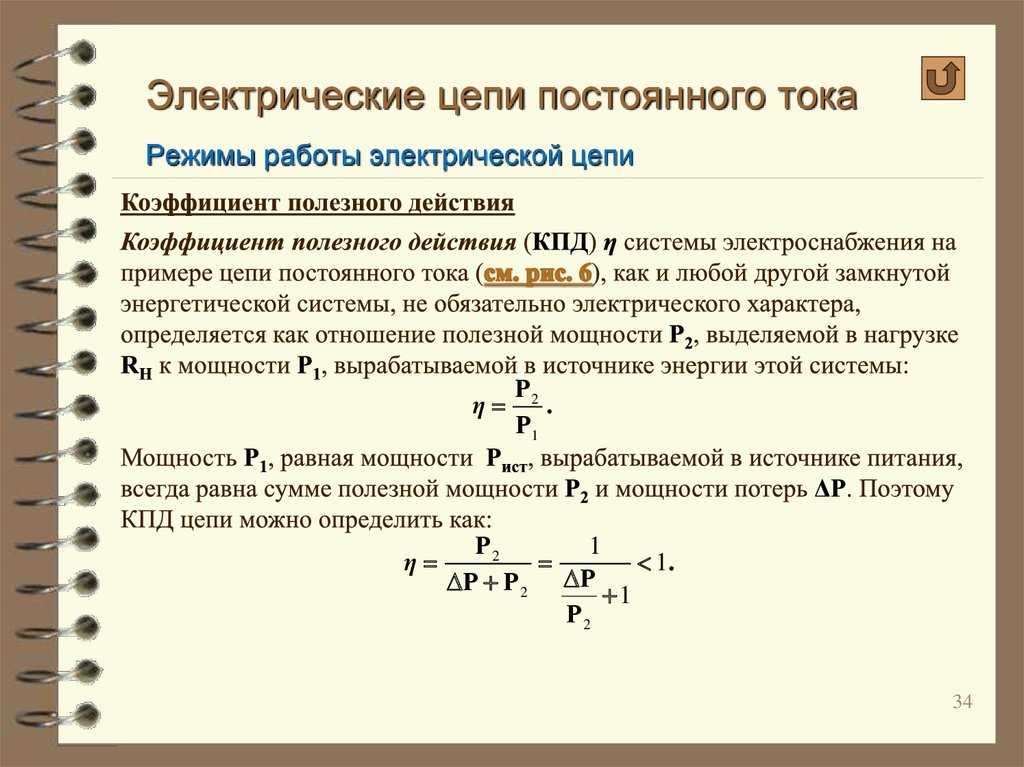 п. д.). Так, у машин постоянного тока мощностью 10 кВт к. п. д. составляет 83 – 87%, мощностью 100 кВт – 88 – 93% и мощностью 1000 кВт – 92 – 96%. Лишь малые машины имеют относительно низкие к. п. д.; например, у двигателя постоянного тока мощностью 10 Вт к. п. д. 30 – 40%.
п. д.). Так, у машин постоянного тока мощностью 10 кВт к. п. д. составляет 83 – 87%, мощностью 100 кВт – 88 – 93% и мощностью 1000 кВт – 92 – 96%. Лишь малые машины имеют относительно низкие к. п. д.; например, у двигателя постоянного тока мощностью 10 Вт к. п. д. 30 – 40%.
| Рисунок 1. Зависимость коэффициента полезного действия электрической машины от нагрузки |
Кривая к. п. д. электрической машины η = f(P2) сначала быстро растет с увеличением нагрузки, затем к. п. д. достигает максимального значения (обычно при нагрузке, близкой к номинальной) и при больших нагрузках уменьшается (рисунок 1). Последнее объясняется тем, что отдельные виды потерь (электрические Iа2rа и добавочные) растут быстрее, чем полезная мощность.
Прямой и косвенный методы определения коэффициента полезного действия
Прямой метод определения к. п. д. по экспериментальным значениям P1 и P2 согласно формуле (1) может дать существенную неточность, поскольку, во-первых, P1 и P2 являются близкими по значению и, во-вторых, их экспериментальное определение связано с погрешностями. Наибольшие трудности и погрешности вызывает измерение механической мощности.
п. д. по экспериментальным значениям P1 и P2 согласно формуле (1) может дать существенную неточность, поскольку, во-первых, P1 и P2 являются близкими по значению и, во-вторых, их экспериментальное определение связано с погрешностями. Наибольшие трудности и погрешности вызывает измерение механической мощности.
Если, например, истинные значения мощности P1 = 1000 кВт и P2 = 950 кВт могут быть определены с точностью 2%, то вместо истинного значения к. п. д.
η = 950/1000 = 0,95
можно получить
или
Поэтому ГОСТ 25941-83, «Машины электрические вращающиеся. Методы определения потерь и коэффициента полезного действия», предписывает для машин с η% ≥ 85% косвенный метод определения к. п. д., при котором по экспериментальным данным определяется сумма потерь pΣ.
Подставив в формулу (1) P2 = P1 — pΣ, получим
| (3) |
Применив здесь подстановку P1 = P2 + pΣ, получим другой вид формулы:
| (4) |
Так как более удобно и точно можно измерять электрические мощности (для двигателей P1 и для генераторов P2), то для двигателей более подходящей является формула (3) и для генераторов формула (4).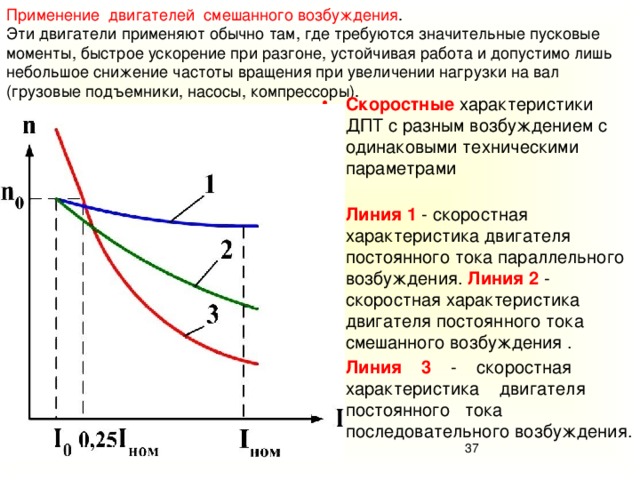 Методы экспериментального определения отдельных потерь и суммы потерь pΣ описываются в стандартах на электрические машины и в руководствах по испытанию и исследованию электрических машин. Если даже pΣ определяется со значительно меньшей точностью, чем P1 или P2, при использовании вместо выражения (1) формул (3) и (4) получаются все же значительно более точные результаты.
Методы экспериментального определения отдельных потерь и суммы потерь pΣ описываются в стандартах на электрические машины и в руководствах по испытанию и исследованию электрических машин. Если даже pΣ определяется со значительно меньшей точностью, чем P1 или P2, при использовании вместо выражения (1) формул (3) и (4) получаются все же значительно более точные результаты.
Условия максимума коэффициента полезного действия
Различные виды потерь различным образом зависят от нагрузки. Обычно можно считать, что одни виды потерь остаются постоянными при изменении нагрузки, а другие являются переменными. Например, если генератор постоянного тока работает с постоянной скоростью вращения и постоянным потоком возбуждения, то механические и магнитные потери являются также постоянными. Наоборот, электрические потери в обмотках якоря, добавочных полюсов и компенсационной изменяются пропорционально Iа², а в щеточных контактах – пропорционально Iа. Напряжение генератора при этом также приблизительно постоянно, и поэтому с определенной степенью точности P2 ∼ Iа.
Напряжение генератора при этом также приблизительно постоянно, и поэтому с определенной степенью точности P2 ∼ Iа.
Таким образом, в общем, несколько идеализированном случае можно положить, что
или
P2 = kнг × P2н, | (5) |
где коэффициент нагрузки
Kнг = I / Iн = P2 / P2н | (6) |
Определяет относительную величину нагрузки машины.
Суммарные потери также можно выразить через kнг:
pΣ = p0 + kнг × p1 + kнг² × p2, | (7) |
где p0 – постоянные потери, не зависящие от нагрузки; p1 – значение потерь, зависящих от первой степени kнг при номинальной нагрузке; p2 – значение потерь, зависящих от квадрата kнг, при номинальной нагрузке.
Подставим P2 из (5) и pΣ из (7) в формулу к. п. д.
Тогда
| (8) |
Установим, при каком значении kнг к. п. д. достигает максимального значения, для чего определим производную dη/dkнг по формуле (8) и приравняем ее к нулю:
Это уравнение удовлетворяется, когда его знаменатель равен бесконечности, т. е. при kнг = ∞. Этот случай не представляет интереса. Поэтому необходимо положить равным нулю числитель. При этом получим
p0 = kнг² × p2. | (9) |
Таким образом, к. п. д. будет максимальным при такой нагрузке, при которой переменные потери kнг² × p2, зависящие от квадрата нагрузки, становятся равными постоянным потерям p0.
Значение коэффициента нагрузки при максимуме к. п. д., согласно формуле (9),
| (10) |
Если машина проектируется для заданного значения ηмакс, то, поскольку потери kнг × p1 обычно относительно малы, можно считать, что
p0 + p2 ≈ pΣ = const.
Изменяя при этом соотношение потерь p0 и p2, можно достичь максимального значения к. п. д. при различных нагрузках. Если машина работает большей частью при нагрузках, близких к номинальной, то выгодно, чтобы значение kнг [смотрите формулу (10)] было близко к единице. Если машина работает в основном при малых нагрузках, то выгодно, чтобы значение kнг [смотрите формулу (10)] было соответственно меньше.
Источник: Вольдек А.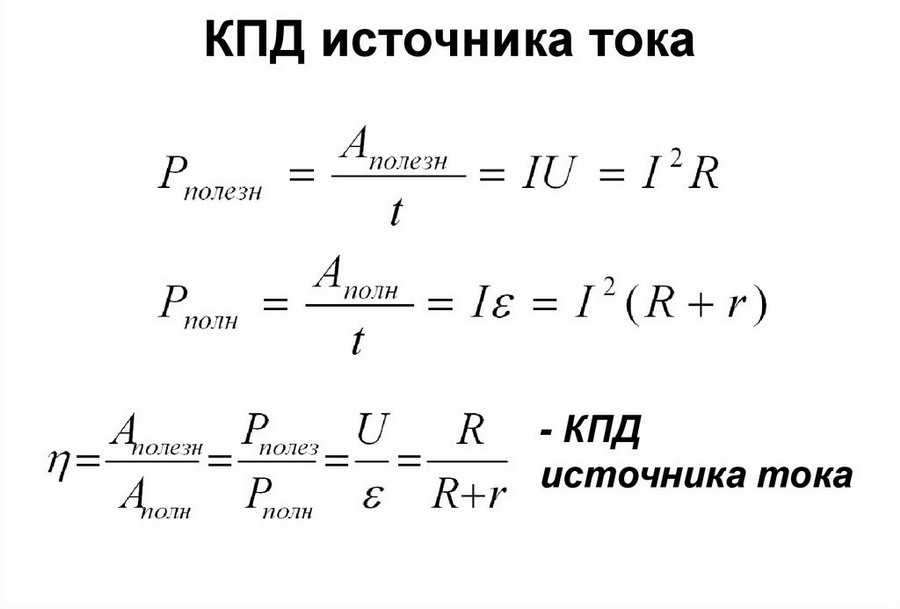 И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Сравнение эффективности двигателей переменного тока
, постоянного тока и BLDC
Эта статья была написана с помощью ChatGPT.
Электродвигатели широко используются во многих отраслях промышленности и применениях. От электромобилей до бытовой техники, эти двигатели необходимы для преобразования электрической энергии в механическую.
Однако не все электродвигатели имеют одинаковый КПД. В этой статье мы рассмотрим различия между различными типами электродвигателей и сравним их эффективность.
Содержание:
- Что такое КПД двигателя
- КПД двигателя постоянного тока
- КПД двигателя переменного тока
- КПД двигателя BLDC
Что такое КПД двигателя
Во-первых, давайте определим, что мы подразумеваем под КПД двигателя. КПД двигателя — это отношение выходной мощности к входной мощности, выраженное в процентах.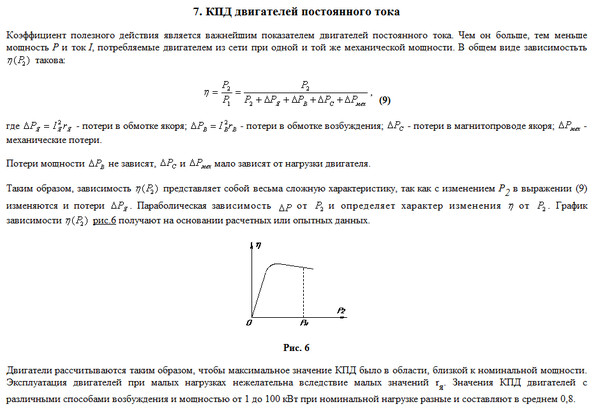
Показывает, насколько эффективно двигатель преобразует электрическую энергию в механическую. Чем выше эффективность, тем меньше энергии теряется в виде тепла или других форм отходов, и тем больше энергии доступно для полезной работы.
Наиболее распространенными типами электродвигателей являются двигатели постоянного тока, двигатели переменного тока и бесщеточные двигатели постоянного тока. Каждый из этих двигателей имеет свои преимущества и недостатки, когда речь идет об эффективности.
Эффективность двигателя постоянного тока
Двигатели постоянного тока являются простейшим типом электродвигателя, и они уже много лет используются в самых разных областях. Они работают, используя постоянный ток для создания магнитного поля, которое вращает якорь двигателя.
Двигатели постоянного тока известны своим высоким пусковым моментом и управляемостью. Однако они также известны своей низкой эффективностью, обычно в пределах 50-80%.
Это связано с потерями энергии в виде тепла в обмотках и щетках двигателя.
Двигатели переменного тока Эффективность
Двигатели переменного тока более сложны, чем двигатели постоянного тока, но чаще используются в промышленных и коммерческих целях. Они работают за счет использования переменного тока для создания вращающегося магнитного поля, которое приводит в движение ротор двигателя.
Двигатели переменного тока известны своим высоким КПД, обычно в пределах 75-90%. Это потому, что у них нет щеток, что исключает связанные с ними потери энергии.
Однако двигатели переменного тока менее управляемы, чем двигатели постоянного тока, и их пусковой момент обычно ниже.
BLDC Motor Efficiency
Бесщеточные двигатели постоянного тока представляют собой новый тип электродвигателей, сочетающий в себе лучшие характеристики двигателей постоянного и переменного тока.
В них используется ротор с постоянными магнитами и электронный контроллер для переключения тока в обмотках двигателя.
Бесщеточные двигатели постоянного тока известны своим высоким КПД, обычно в пределах 80-95%. Это потому, что они не имеют щеток и используют электронное переключение для управления током, что исключает потери энергии.
Это потому, что они не имеют щеток и используют электронное переключение для управления током, что исключает потери энергии.
Бесщеточные двигатели постоянного тока также отличаются высокой управляемостью и пусковым моментом.
Заключение
В заключение следует отметить, что КПД электродвигателя зависит от типа двигателя и области его применения.
При сравнении эффективности электродвигателей важно учитывать конкретное применение и требования.
Двигатели постоянного тока имеют меньший КПД, но высокую управляемость и пусковой момент. Двигатели переменного тока имеют более высокий КПД, но более низкую управляемость и пусковой момент. Бесщеточные двигатели постоянного тока обладают высокой эффективностью, управляемостью и пусковым крутящим моментом, но, как правило, стоят дороже.
При выборе электродвигателя важно учитывать компромисс между эффективностью, управляемостью и стоимостью, чтобы найти лучший вариант для ваших конкретных потребностей.
Оставить комментарий
Комментарии будут одобрены перед показом.
Похожие сообщения в блоге
Как проверить бесщеточный двигатель с упорным стендом
Как рассчитать и измерить тягу винта
Сравнение статических и динамических испытаний при измерении данных
Эффективность двигателя постоянного тока — ElectricalWorkbook
В этом разделе вы изучаете эффективность двигателя постоянного тока.
Эффективность двигателя постоянного тока определяется как отношение выходной мощности к потребляемой и может быть выражена как
\[\text{ }\!\!\eta\!\!\text{ }=\text { }\frac{\text{Выходная мощность}}{\text{Потребляемая мощность}}=\frac{\text{Выходная мощность}}{\text{Выходная мощность}+\text{Потери}}\]
\[=\frac{\text{Потребляемая мощность – потери}}{\text{Потребляемая мощность}}\]
Рис. 1: Кривая КПД двигателя постоянного тока
1: Кривая КПД двигателя постоянного тока
КПД обычно выражается как процент. КПД двигателя постоянного тока зависит от выходной мощности. Первоначально при низкой выходной мощности эффективность низкая из-за постоянных потерь. По мере увеличения выхода эффективность увеличивается, пока не достигнет определенного максимального значения. Если выпуск еще больше увеличить, то эффективность снижается из-за быстрого роста переменных потерь. Двигатели обычно рассчитаны на максимальную эффективность при работе с полной или почти полной нагрузкой. КПД двигателя постоянного тока при нормальных условиях работы может достигать 95%. Типичная кривая КПД, показывающая, как КПД зависит от выходной мощности, показана на рис. 1.
УСЛОВИЕ МАКСИМАЛЬНОЙ КПД
Условия максимального КПД двигателя постоянного тока можно получить, используя выражение для его КПД .
Рис. 2: Шунтирующий двигатель постоянного тока
Рассматривая случай параллельного двигателя постоянного тока (рис.