Содержание
Контроллер шагового двигателя схема | KAVMASTER
За какое-то время у меня скопилось много шаговых двигателей, но все не было времени ими заняться, а ведь шаговый двигатель вещь довольно интересная и полезная. Но у многих радиолюбителей возникают проблемы с запуском таких двигателей, вот я и решил собрать контроллер для проверки наиболее часто распространённых шаговых двигателей.
Блок управления шаговым двигателем
Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует очень много типов шаговых двигателей, но самыми простыми в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины (см. Рис.1). Их устанавливают в такие аппараты, как принтер, копир, дисковод и т.д.
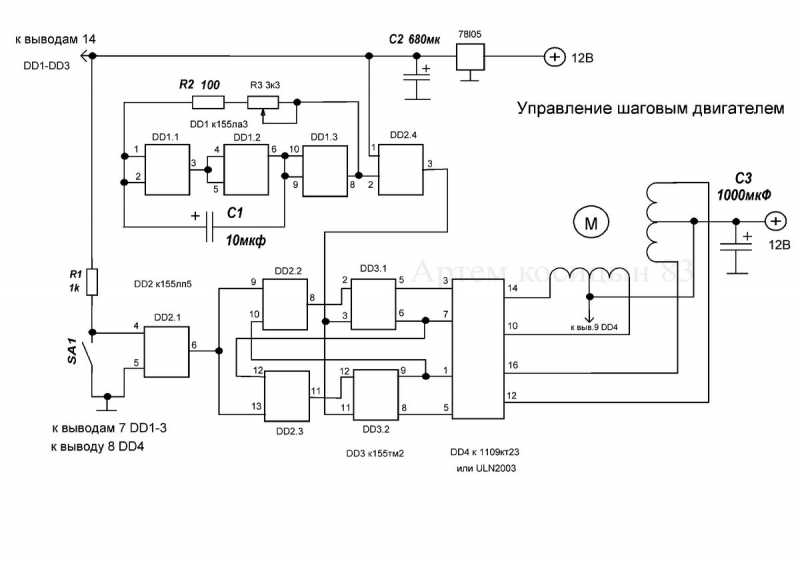
Схема управления шаговым двигателем.

На рисунке 2 представлена схема управления шаговым двигателем.
Сперва хотел разработать схему на жесткой логике, но когда определился с функциями, которые она должна выполнять, пришло твердое решение использовать для этих целей микроконтроллер. И так, что можно определить с помощью данного блока управления.
- Можно определить количество шагов.
- Определить один из двух алгоритмов работы двигателя.
- Опробовать работу двигателя в полушаговом режиме.
- Можно опробовать работу в полношаговом режиме.
Еще раз повторюсь, что разновидностей шаговых двигателей много и данный контроллер подойдет не для всех.
Программы управления шаговыми двигателями
Программа управления состоит из пяти подпрограмм, которые переключаются кнопкой BS3 – «Выбор программ». Номер выбранной подпрограммы отображается тремя светодиодами в двоичной системе счисления. При первом включении должен загореться светодиод HL1, индицирующий о том, что включена первая подпрограмма работы шагового двигателя в полушаговом режиме.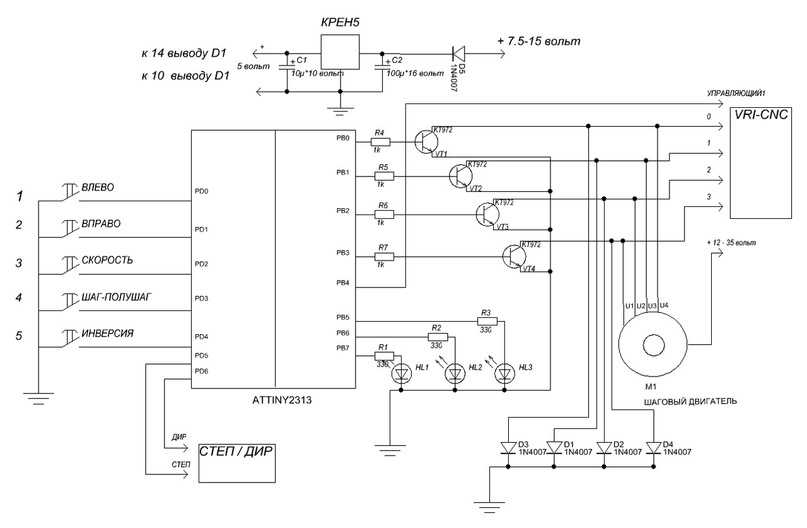 Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя.
Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя.
Возможно, придется экспериментировать. На скриншоте 1 (передняя панель виртуального осциллографа программы Proteus) можно наблюдать импульсную последовательность и коды полушагов работы двигателя. Некоторые из шаговиков по этому алгоритму у меня не работали.
Полношаговый алгоритм работы шагового двигателя
Подпрограмма №2 – светится второй светодиод. В этой подпрограмме двигатель будет работать по полно шаговому алгоритму, показанному на скрине 2.
Подпрограмма №3 – светятся первый и второй светодиоды. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3.
Количество шагов шагового двигателя
Подпрограмма №4 – светится третий светодиод. Данная подпрограмма обеспечивает один шаг двигателя при каждом нажатии на кнопку «Право». Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Подпрограмма №5 – светятся первый и третий светодиоды. В этой подпрограмме творится тоже самое, только алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 3.
Общий вид платы — на фото.
Файл прошивки, схему и рисунок печатной платы можно скачать по ссылке ниже.
Скачать файлы
Скачано: 1065, размер: 23.1 KB, дата: 10.Ноя.2018
Купить USB программатор PIC K150 ICSP
Автор публикации
Простой драйвер шагового двигателя | 2 Схемы
Содержание
Предлагается 2 варианта схем простейших драйверов шаговых моторов, реально рабочих, так как информация взята из зарубежных радиоконструкторов (ссылка на оригиналы в конце статьи).
Схема драйвера шагового двигателя
Схема драйвера шагового двигателя не содержит дорогих деталей и программируемых контроллеров. Работа может регулироваться в широком диапазоне с помощью потенциометра PR1. Есть изменение направления вращения двигателя. Катушки шагового двигателя переключаются с помощью четырех МОП-транзисторов T1-T4. Применение в блоке транзисторов большой мощности типа BUZ10 позволит подключить двигатели даже с очень большим током.
Особенности схемы и детали
- управление четырехфазным шаговым двигателем
- плавная регулировка скорости вращения в пределах всего диапазона
- изменение направления вращения мотора
- возможная остановка двигателя
- блок питания 12 В постоянного тока
Детали – IC1: 4070, IC2: 4093, IC3: 4027, T1-T4: BUZ10, BUZ11
Блок драйвер шагового двигателя собран на печатной плате, показанной на рисунке. Монтируем, как правило, начиная с припайки резисторов и панелек для интегральных микросхем, а под конец электролитические конденсаторы и транзисторы большой мощности.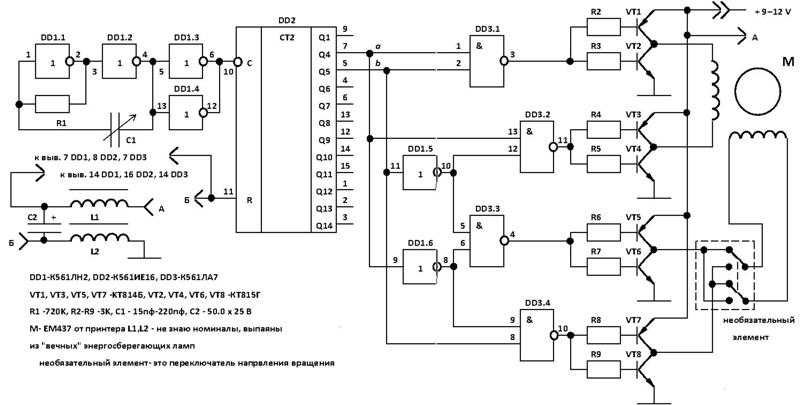
Блок, собранный из проверенных компонентов, не требует настройки и запускается сразу после подачи питания. Со значениями элементов, указанными на схеме, позволяет работать двигателю 5,25” и выполняет изменение скорости вращения в интервале от 40 об./мин. до 5 об./мин.
Биполярный контроллер шаговых двигателей
Схема представляет собой дешевую, и прежде всего легко собираемую альтернативу доступным микропроцессорным биполярным контроллерам шаговых двигателей. Рекомендуется там, где точность управления играет меньшую роль, чем цена и надежность.
Принципиальную схему можно разделить на следующие блоки:
- последовательный чип, генерирующий битовые строки,
- локальный генератор тактового сигнала,
- схема управления питанием катушек,
- выходные буферы Н-моста,
- схемы защиты входных сигналов управления.
Контроллер должен питаться постоянным напряжением, хорошо отфильтрованным, желательно стабилизированным.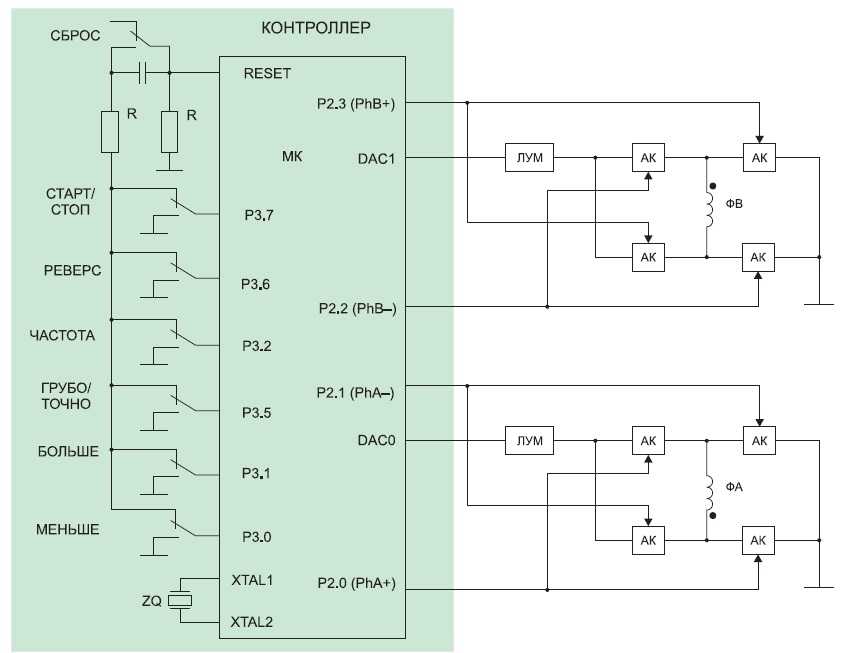
Теперь пару слов про H-мосты, которые будут работать с этим драйвером. Они должны принимать на своих входах все возможные логические состояния (00, 01, 10, 11), без риска какого-либо повреждения. Просто в некоторых конфигурациях мостов построенных из дискретных элементов, запрещается одновременное включение двух входов – их естественно нельзя использовать с этим контроллером. Мосты выполненные в виде интегральных микросхем (например L293, L298), устойчивы к этому.
И в завершение третий вариант контроллера, на микросхемах STK672-440, имеющий все необходимые защиты и функции смотрите по ссылке.
- Скачать описание на простой драйвер шагового двигателя
- Скачать описание на биполярный контроллер шаговых моторов
Схема драйвера шагового двигателя
Цепь двоичного счетчика декад теоретически является схемой привода двигателя. Преимущества этой схемы в том, что ее можно использовать для работы 2-10-шаговых шаговых двигателей. Давайте поговорим об основах шагового двигателя, прежде чем двигаться дальше.
Преимущества этой схемы в том, что ее можно использовать для работы 2-10-шаговых шаговых двигателей. Давайте поговорим об основах шагового двигателя, прежде чем двигаться дальше.
Шаговый двигатель не работает от постоянного источника питания. Только регулируемые и упорядоченные импульсы мощности могут привести его в действие. Мы должны обсудить УНИПОЛЯРНЫЕ и БИПОЛЯРНЫЕ шаговые двигатели, прежде чем идти дальше. Мы можем взять центр, отводящий все обмотки для общей местности или общей мощности, как это видно в ОДНОПОЛЯРНОМ шаговом двигателе.
Buy from Amazon
Hardware Components
The following components are required to make Stepper Motor Driver Circuit
| S. No | Component | Value | Qty |
|---|---|---|---|
| 1 | 555 Timer IC | 1 | |
| 2 | Конденсатор | 1 мкф, 100 мкф | 1 |
| 3 | . 0034 0034 | 1 | |
| 4 | Resistor | 1K, 22K | 1 |
| 5 | Supply voltage | +9V to +12V | 1 |
| 6 | IC | CD4017 | 1 |
| 7 | Diode | 1N4007 | 1 |
| 8 | Transistor | 2N3904 or 2N2222 | 2 |
NE555 IC Pinout
Для получения подробного описания схемы выводов, размеров и технических характеристик загрузите техническое описание микросхемы NE555.
Схема работы
На рисунке показана принципиальная схема двухкаскадного драйвера шагового двигателя. ИС таймера 555 теперь производит часы или прямоугольную волну, как показано на принципиальной схеме. В этом случае тактовая частота не может постоянно поддерживаться, поэтому шаговый двигатель должен иметь переменную скорость вращения.
Потенциометр или пресет с резистором 1 кОм в ответвлении между 6-м и 7-м контактами задается для достижения этой переменной скорости. Сопротивление меняется в зависимости от горшка, поэтому 555 изменений в ответвлении дают тактовую частоту.
На рисунке важна только третья формула. Вы можете видеть, что частота обратно пропорциональна R2, что составляет 1 K + 220 K POT в цепи. Таким образом, увеличение R2 вызывает снижение частоты. И затем частота уменьшается, если горшок меняется, чтобы увеличить сопротивление ветви.
Счетчик DECADE BINARY поставляется вместе с часами, созданными микросхемой таймера 555. Двоичный счетчик теперь подсчитывает количество импульсов, подаваемых на часы, и формирует высокий вывод для соответствующего вывода.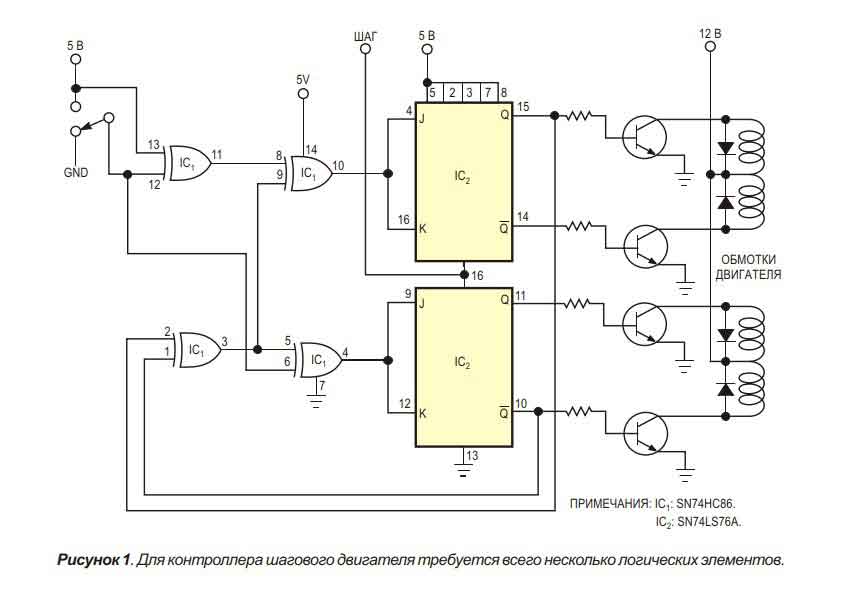 Если число событий равно 2, то на выводе счетчика Q1 устанавливается высокий уровень, а на выводе счетчика Q5 — высокий уровень, если подсчитано 6. Это эквивалентно двоичному счетчику, за исключением того, что счет является десятичным, т. е. 1 2 3 4 — 9, поэтому только выводы Q6 будут иметь высокий уровень, если счет равен 7. (1 + 2 + 4) В двоичных счетчиках выводы сильные в двоичных счетчиках Q0. , Q1 и Q2. Эти выходы подаются на транзисторы для лучшей работы шагового двигателя.
Если число событий равно 2, то на выводе счетчика Q1 устанавливается высокий уровень, а на выводе счетчика Q5 — высокий уровень, если подсчитано 6. Это эквивалентно двоичному счетчику, за исключением того, что счет является десятичным, т. е. 1 2 3 4 — 9, поэтому только выводы Q6 будут иметь высокий уровень, если счет равен 7. (1 + 2 + 4) В двоичных счетчиках выводы сильные в двоичных счетчиках Q0. , Q1 и Q2. Эти выходы подаются на транзисторы для лучшей работы шагового двигателя.
Применение и использование
Поскольку шаговый двигатель управляется цифровым способом с помощью входного импульса, он может работать в системах с компьютерным управлением. Они используются в станках с числовым программным управлением и используются для магнитофонов, дисков, принтеров и электрических часов.
Похожие сообщения:
Схема контроллера шагового двигателя
by Kiran Saleem
1317 просмотров
В этом уроке мы собираемся сделать «схему контроллера шагового двигателя».
Когда требуется определенное количество оборотов, необходимы шаговые двигатели. Название этого двигателя дано так, потому что вращение вала имеет ступенчатую форму, которая отличается от двигателя постоянного тока или любого другого двигателя. В других двигателях скорость вращения и угол остановки не полностью контролируются, если не подключена необходимая цепь. Это неуправление присутствует из-за момента инерции. Чтобы шаговый двигатель работал правильно и без остановок, нам нужен контроллер шагового двигателя. Итак, здесь мы разрабатываем простую схему контроллера шагового двигателя с таймером 555 с несколькими легкодоступными компонентами, которая обеспечивает непрерывную работу шагового двигателя без каких-либо прерываний или остановки шага.
Эта схема состоит из двух ступеней, первая используется для генерации прямоугольных импульсов, а другая — для подачи шагового импульса на шаговый двигатель. Теперь с помощью этой схемы мы можем управлять униполярными шаговыми двигателями с разным номинальным напряжением.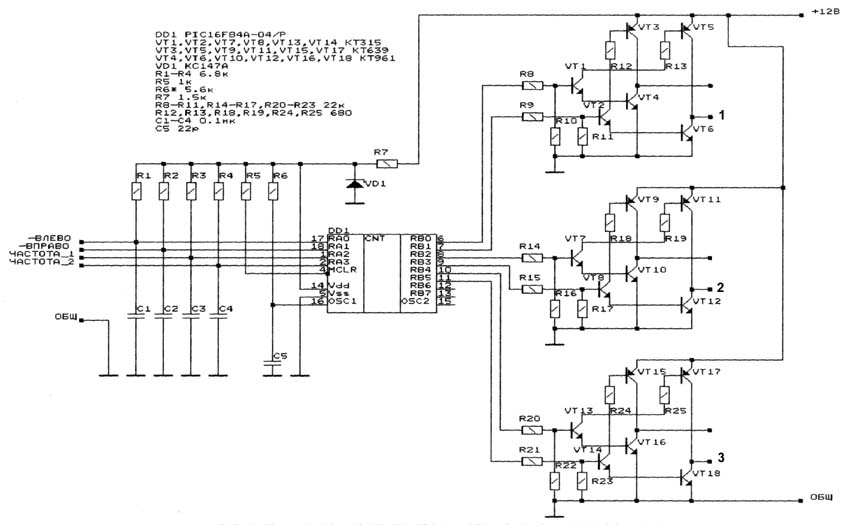 Если вы хотите управлять шаговыми двигателями выше 12 В, добавьте внешний источник питания к шаговому двигателю и силовым переключающим транзисторам, потому что эта схема использует только источник питания 9 В и способна управлять шаговыми двигателями ниже 12 В.
Если вы хотите управлять шаговыми двигателями выше 12 В, добавьте внешний источник питания к шаговому двигателю и силовым переключающим транзисторам, потому что эта схема использует только источник питания 9 В и способна управлять шаговыми двигателями ниже 12 В.
Hardware Required
| SR NO | Value | Qty |
| 1 | IC CD4017 | 1 |
| 2 | Transistors BC547 | 4 |
| 3 | IC 555 | 1 |
| 4 | Diode 1N4007 | 4 |
| 5 | Capacitor 1uF , 0. 01uF 01uF | 1,1 |
| 6 | Resistor 1KΩ , 2KΩ | 2,1 |
| 7 | Variable Resistor 100KΩ | 1 |
| 8 | Stepper Motor | 1 |
| 9 | Connecting Wires | – |
| 10 | Батарея 9 В | 1 |
Принципиальная схема
Шаговый двигатель
Шаговые двигатели представляют собой двигатели постоянного тока, которые перемещаются дискретными шагами. Этот двигатель также известен как шаговый двигатель, и в основном это бесщеточный электродвигатель постоянного тока, который делит свое полное вращение на несколько равных шагов. У них есть несколько катушек, которые организованы в фазы. При последовательном включении каждой фазы двигатель будет вращаться шаг за шагом. Шаговый двигатель не работает при постоянном питании. Он может работать только на контролируемых и упорядоченных импульсах мощности. Шаговое управление с компьютерным управлением позволяет добиться очень точного позиционирования и/или контроля скорости. По этой причине шаговые двигатели являются предпочтительными двигателями для многих приложений с точным управлением движением, таких как 3D-принтеры, станки с ЧПУ, автоматические двери и т. д.
У них есть несколько катушек, которые организованы в фазы. При последовательном включении каждой фазы двигатель будет вращаться шаг за шагом. Шаговый двигатель не работает при постоянном питании. Он может работать только на контролируемых и упорядоченных импульсах мощности. Шаговое управление с компьютерным управлением позволяет добиться очень точного позиционирования и/или контроля скорости. По этой причине шаговые двигатели являются предпочтительными двигателями для многих приложений с точным управлением движением, таких как 3D-принтеры, станки с ЧПУ, автоматические двери и т. д.
Этот шаговый двигатель делится на две категории в зависимости от его обмотки статора: ОДНОПОЛЯРНЫЕ и БИПОЛЯРНЫЕ шаговые двигатели.
Биполярный шаговый двигатель
В БИПОЛЯРНОМ шаговом двигателе у нас есть концы фаз и нет центральных отводов. Итак, биполярный шаговый двигатель имеет одну обмотку на фазу и всего 4 вывода для соединения двух наборов внутренних катушек электромагнита. Управление этим типом шагового двигателя отличается и является сложным, а схема управления не может быть легко спроектирована без микроконтроллера.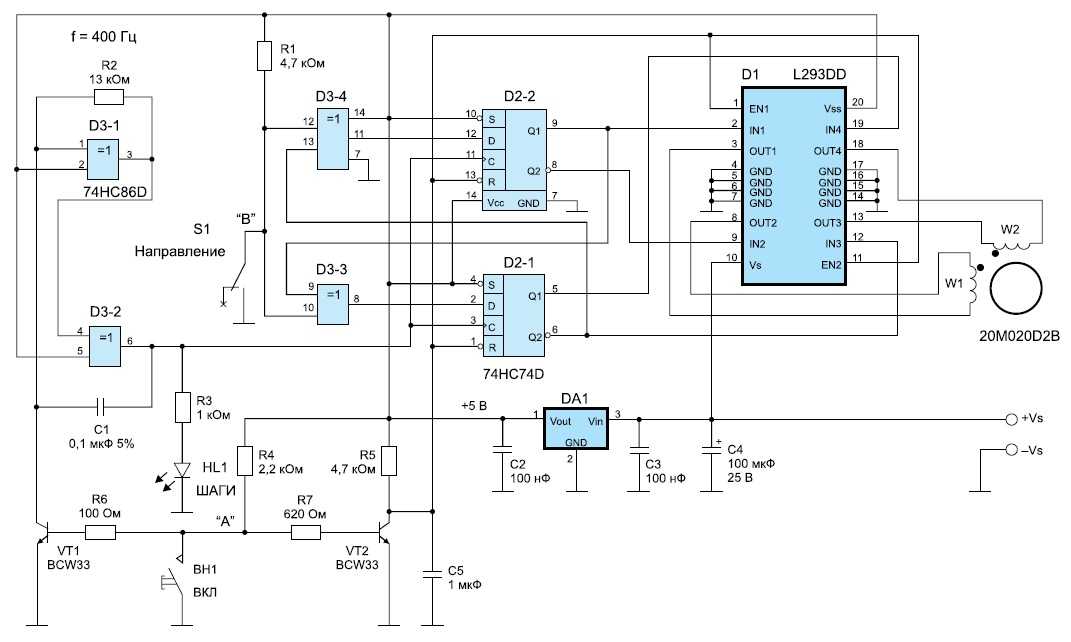 Таким образом, можно добиться изменения направления тока через катушки двигателя вперед и назад, это может быть сложнее, чем униполярный, но H-мост и схемы драйвера шагового двигателя делают это очень простым.
Таким образом, можно добиться изменения направления тока через катушки двигателя вперед и назад, это может быть сложнее, чем униполярный, но H-мост и схемы драйвера шагового двигателя делают это очень простым.
Униполярный шаговый двигатель
В УНИПОЛЯРНОМ шаговом двигателе мы можем взять отвод от центра обеих фазных обмоток для общего заземления или общего питания. Здесь униполярный имеет 5, 6 и 8 выводов и управляет одной обмоткой с центральным отводом на каждую фазу входа. На этом изображении показаны различные типы униполярных шаговых двигателей и конфигурация их выводов. В первом случае черный берется за общий. В случае 2 мы можем принять черное и белое за точку соприкосновения или силу. В случае, когда 3 оранжевых, черных, красных, желтых, все объединяются для общего заземления или питания. Чтобы узнать больше, обратитесь к техническому описанию вашего шагового двигателя.
Объяснение работы
На принципиальной схеме показан двухступенчатый драйвер шагового двигателя.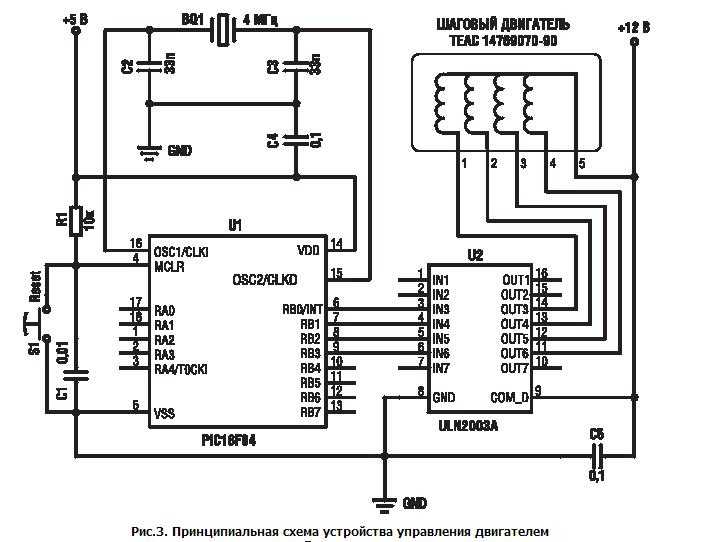 Здесь таймер IC 555 работает как нестабильный мультивибратор для генерации тактового сигнала или прямоугольного сигнала. И произвел прямоугольный импульс на основе времязадающего резистора и времязадающего конденсатора. Частота генерации тактовых импульсов в этом случае не может поддерживаться постоянной, поэтому нам нужно получить переменную скорость для шагового двигателя. Чтобы получить эту переменную скорость, предустановка помещается последовательно с резистором 1 кОм в ответвлении между 6 -й и 7 -й пин.
Здесь таймер IC 555 работает как нестабильный мультивибратор для генерации тактового сигнала или прямоугольного сигнала. И произвел прямоугольный импульс на основе времязадающего резистора и времязадающего конденсатора. Частота генерации тактовых импульсов в этом случае не может поддерживаться постоянной, поэтому нам нужно получить переменную скорость для шагового двигателя. Чтобы получить эту переменную скорость, предустановка помещается последовательно с резистором 1 кОм в ответвлении между 6 -й и 7 -й пин.
Второй каскад представляет собой каскад IC CD4017 счетчика декад, и эта интегральная схема подсчитывает прямоугольные импульсы от IC таймера и обеспечивает вывод шаговых импульсов через выходные контакты Q0, Q1, Q2 и Q3. Каждый импульс подается в катушку шагового двигателя через переключающие транзисторы BC547. Размещенные здесь диоды предназначены для защиты транзисторов от индуктивных выбросов обмотки шагового двигателя. Если их не разместить, можно рискнуть взорвать транзисторы.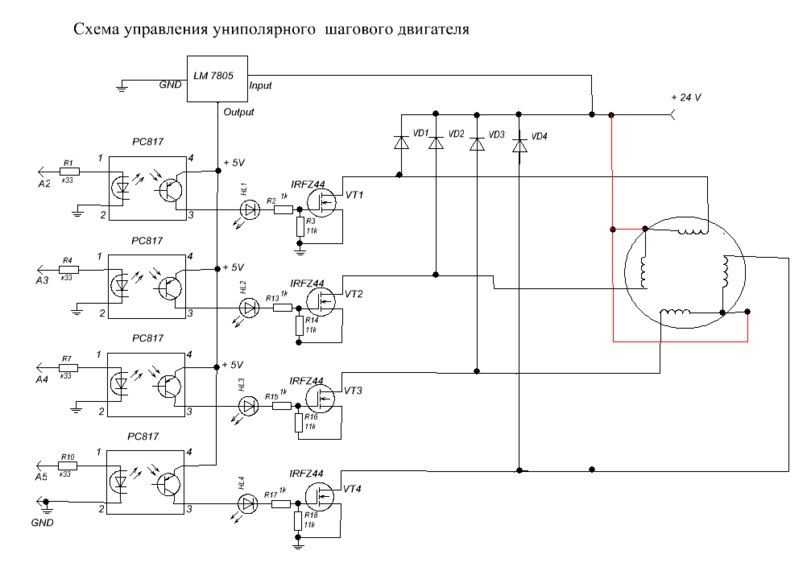 Чем больше частота импульсов, тем больше вероятность взрыва без диодов. В качестве предустановки устанавливается значение для определенной частоты импульсов. Эти часы подаются на счетчик декад, чтобы получать от него регулярные выходные данные. Выходы декадного счетчика подаются на транзисторы для управления мощными катушками шагового двигателя в последовательном порядке. Сложность заключается в том, что когда последовательность завершена, скажем, 1, 2, 3, 4, шаговый двигатель завершает четыре шага и готов к повторному запуску, однако счетчик может идти до 10, и поэтому он работает без перерыва. Если это происходит, шаговый двигатель должен ждать, пока счетчик не завершит свой цикл 10, что недопустимо. Это регулируется подключением RESET к Q4, поэтому, когда счетчик проходит пять счетов, он сбрасывается и начинается с одного, это запускает последовательность шагового двигателя. Следовательно, когда импульс и питание подаются на шаговый двигатель, его ротор начинает вращаться, и скорость вращения ротора может изменяться резистором VR1.
Чем больше частота импульсов, тем больше вероятность взрыва без диодов. В качестве предустановки устанавливается значение для определенной частоты импульсов. Эти часы подаются на счетчик декад, чтобы получать от него регулярные выходные данные. Выходы декадного счетчика подаются на транзисторы для управления мощными катушками шагового двигателя в последовательном порядке. Сложность заключается в том, что когда последовательность завершена, скажем, 1, 2, 3, 4, шаговый двигатель завершает четыре шага и готов к повторному запуску, однако счетчик может идти до 10, и поэтому он работает без перерыва. Если это происходит, шаговый двигатель должен ждать, пока счетчик не завершит свой цикл 10, что недопустимо. Это регулируется подключением RESET к Q4, поэтому, когда счетчик проходит пять счетов, он сбрасывается и начинается с одного, это запускает последовательность шагового двигателя. Следовательно, когда импульс и питание подаются на шаговый двигатель, его ротор начинает вращаться, и скорость вращения ротора может изменяться резистором VR1.