Содержание
Контроллер бесколлекторного/ коллекторного двигателя — Сервосила SC-25C (круглой формы)
Контроллеры электродвигателей
Контроллеры СЕРВОСИЛА — это встраиваемые блоки управления для сервоприводов и тяговых электроприводов на основе коллекторных или бесколлекторных синхронных двигателей. Контроллеры превращают любой бесколлекторный или коллекторный электродвигатель в сервопривод или в интеллектуальный тяговый электропривод.
Контроллеры предназначены для управления электродвигателями (PMSM, BLDC, Direct Drive, Gimbal, Brushed) любых производителей в сочетании с различными энкодерами положения вала (BISS-C, SSI, SPI, ШИМ, квадратурный) или без них. Для подключения к управляющим компьютерам АСУ или к бортовым системам управления контроллеры предоставляют интерфейсы управления CAN и USB.
Компания Сервосила изначально разработала данные контроллеры для применения в своих собственных продуктах — руках-манипуляторах и сервоприводах. Технология этих контроллеров прошла несколько итераций разработки и совершенствования и включила в себя значительный опыт, накопленный компанией в процессе эксплуатации своих роботов в различных, зачастую экстремальных, условиях. С тех пор контроллеры СЕРВОСИЛА нашли широкое применение в самых различных отраслях промышленности и науки, — везде, где требуется компьютерное управление бесколлекторными или коллекторными двигателями.
Технология этих контроллеров прошла несколько итераций разработки и совершенствования и включила в себя значительный опыт, накопленный компанией в процессе эксплуатации своих роботов в различных, зачастую экстремальных, условиях. С тех пор контроллеры СЕРВОСИЛА нашли широкое применение в самых различных отраслях промышленности и науки, — везде, где требуется компьютерное управление бесколлекторными или коллекторными двигателями.
Контроллеры электродвигателей поставляются в двух исполнениях — плата прямоугольной формы (модель SC-25R) и плата круглой формы (модель SC-25C). Данные модели совершенно идентичны по интерфейсам и возможностям и отличаются только формой плат. Максимальный ток фазы двигателя — 25А.
Основными областями применения данных устройств являются:
- сервомеханизмы, сервоприводы,
- тяговые электроприводы,
- АСУ ТП, промышленные линии, конвейеры, насосы,
- робототехнические устройства,
- медицинская техника,
- сельскохозяйственная техника,
- интеллектуальное торговое оборудование,
- автоматизированное складское оборудование,
- испытательные стенды с компьютерным управлением,
- системы измерения и автоматической диагностики,
- тяговые электроприводы различных мобильных шасси,
- станки с ЧПУ,
- системы компьютерного зрения.


Поддерживаемые типы двигателей (любых производителей):
- Бесколлекторные синхронные двигатели (PMSM, BLDC, Direct Drive, Gimbal), в том числе T-Motor, Maxon, Dunker и других.
- Бездатчиковые и с датчиками Холла (Sensorless и Sensored).
- Со встроенными энкодерами и с внешними энкодерами.
- Коллекторные двигатели, в том числе, с энкодерами для измерения скорости и положения.
- Соленоиды.
Контроллеры имеют набор интерфейсов для подключения внешних датчиков абсолютного положения вала («энкодеров») с разрешением до 20 бит:
- Квадратурный интерфейс с индекс-сигналом,
- BISS-C интерфейс (в том числе к магнитным энкодерам),
- SSI интерфейс,
- ШИМ интерфейс,
- SPI интерфейс.
Датчики положения вала («энкодеры») применяются в различных режимах сервоуправления, в режимах Direct Drive, а также для поддержания плавного движения вала на низких скоростях вращения. Если энкодер в электроприводе отсутствует, то для таких случаев контроллеры поддерживают режимы бездатчикового управления (sensorless control) и управления по датчикам Холла (sensored control), а также серворежимы direct control, в которых энкодеры могут не требоваться.
Если энкодер в электроприводе отсутствует, то для таких случаев контроллеры поддерживают режимы бездатчикового управления (sensorless control) и управления по датчикам Холла (sensored control), а также серворежимы direct control, в которых энкодеры могут не требоваться.
Если энкодер в приводе присутствует, то контроллеры используют его, когда это имеет смысл. Если энкодер не подключен, то контроллеры могут работать и без него, но, возможно, в упрощенном режиме работы.
Подключение двигателей, датчиков положения вала, датчиков Холла и управляющих шин CANb и USB 2.0 производится:
- либо через штатные разъемы на платах контроллеров,
- либо посредством припайки кабелей в специально предусмотренные отверстия на платах, чем обеспечивается виброустойчивость соединений.
Конструктивно разъемы для подключения кабелей расположены только с одной из сторон плат; тыльная сторона плат не имеет разъемов и предназначена для подключения теплоотводного радиатора или для монтажа платы напрямую на корпус электропривода, использующегося для отвода тепла от платы.
Контроллеры не имеют разъемов, выходящих «в сторону»; все разъемы имеют только ориентацию «вверх». Это сделано для облегчения интеграции контроллеров внутрь корпусов устройств, таких как сервоприводы цилиндрической формы, или в отсеки электрооборудования небольших габаритов.
Предусмотрен механизм для обновления прошивки плат через порт RS232.
Режимы управления
В контроллерах реализованы следующие режимы управления бесколлекторными двигателями:
1.Стабилизация выходного момента на валу (ETC: Electronic Torque Control). Применяется для точного управления силой, с которой электропривод воздействует на нагрузку, например, в испытательных стендах, АСУ ТП или в шагающих роботах.
2.Стабилизация скорости вращения вала (ESC: Electronic Speed Control). Применяется для поддержания заданной скорости вращения двигателя, вне зависимости от меняющейся внешней нагрузки, например, в тяговых электроприводах конвейеров, насосов или в шасси мобильных роботов. Контроллер автоматически увеличивает или уменьшает момент на валу для того, чтоб поддерживать скорость вращения вала постоянной.
Контроллер автоматически увеличивает или уменьшает момент на валу для того, чтоб поддерживать скорость вращения вала постоянной.
3. Сервоуправление (Servo Control) — поворот до заданного положения вала и последующее удержание вала с использованием датчика положения вала (энкодера) через редуктор или напрямую. Применяется в робототехнических руках-манипуляторах, АСУ ТП, станках с ЧПУ и любых других устройствах, где необходимо повернуть вал двигателя на заданный угол, а затем поддерживать положение при изменяющейся внешней нагрузке. В зависимости от подключенного энкодера положения вала обеспечивается точность поворота сервопривода до 20 бит.
4. Direct Drive — точное управление положением вала посредством прямого позиционирования магнитного поля статора электродвигателя, в том числе при отсутствии редуктора в электроприводе. Применяется в системах компьютерного зрения, станках с ЧПУ, линейных двигателях, — везде где требуется максимальная точность управления положением без редукторов. В этом режиме электропривод на бесколлекторном двигателе может заменить шаговые двигатели при значительном улучшении точности.
В этом режиме электропривод на бесколлекторном двигателе может заменить шаговые двигатели при значительном улучшении точности.
5.Тормоз вала («блокировка вращения»), — блокировка вращения вала вне зависимости от воздействия внешних нагрузок, например, для фиксации остановленного конвейера или для торможения колес мобильного шасси, стоящего «на горке». Блокировка происходит только работой бесколлекторного двигателя без применения каких-либо дополнительных тормозных устройств. Для блокировки вала применяется метод, минимизируещий потребление электрической энергии.
6. Рекуперация энергии в батарею. Если контроллер питается от батареи, то он способен «пропускать» ток обратно в батарею тогда, когда электродвигатель работает в режиме электрогенератора, например, при торможении мобильного шасси. При этом возможно программное управление силой тока, идущего в батарею. Этот режим также применяется в системах «стартер-генератор» в сочетании с двигателями внутреннего сгорания (ДВС), в которых после запуска ДВС электродвигатель переходит в режим электрогенератора.
В контроллерах СЕРВОСИЛА реализованы современные алгоритмы управления электродвигателями:
- Direct Drive Control,
- Electronic Speed Control (ESC),
- Electronic Torque Control (ETC),
- Field Oriented Control (FOC),
- с Back-EMF Observer и Hall Sensors Observer,
- с функцией Q-D axis coupling compensation для гладкости хода,
- с опциональным field weakening для достижения максимальных скоростей вращения,
- с интеллектуальными алгоритмами защиты
- и управления динамикой электродвигателя,
- и автоматическим определением характеристик двигателя и привода.
Реализованный набор алгоритмов обеспечивает динамическую устойчивость и малошумность работы электродвигателя, а также достижение максимального момента или максимальной скорости вращения вала (в зависимости от задачи) при оптимизации энергопотребления и обеспечении защиты электродвигателя от перегрева, а редуктора от поломки.
Также с помощью данных контроллеров можно управлять соленоидами.
Автонастройка
Для облегчения настройки контроллера под выбранный электродвигатель предусмотрен режим автонастройки, в котором автоматически определяются основные характеристики электродвигателя и вычисляются оптимальные настройки законов управления. Эта функция значительно упрощает интеграцию контроллера с новыми бесколлекторными двигателями, если даже характеристики двигателя точно не известны по каким-либо причинам («утерян datasheet»).
Интерфейсы программного управления
Предусмотрены следующие интерфейсы для интеграции с управляющими компьютерами или бортовыми системами управления:
- Шина CAN с протоколом верхнего уровня CANopen. Контроллеры имеют два порта CAN для облегчения построения «гирлянды» из контроллеров. До 126 контроллеров СЕРВОСИЛА могут быть подключены к единой шине CAN. Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы.
 Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы.
Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы.
- Порт USB 2.0, который автоматически инициализируется, как виртуальный COM-порт в Windows 10, 8 и в Linux. Установка специальных драйверов не требуется ни в Windows, ни в Linux. Порт USB 2.0 у контроллеров СЕРВОСИЛА удобен тем, что позволяет управлять электродвигателями с помощью обычных персональных компьютеров или их промышленных вариантов, например, на испытательных стендах или автоматизированных системах контроля качества. Контроллеры СЕРВОСИЛА способны выполнять функцию USB-в-CAN шлюза («переходника USB2CAN») для обеспечения доступа управляющих компьютеров к сети CAN. Этот «переходник» работает как в Windows 10, 8, так и в Linux.
К Windows 10/8/7 контроллеры СЕРВОСИЛА подключаются через интерфейс USB 2.0, который автоматически определяется, как виртуальный COM-порт. Управляющие пользовательские программы, работающие под Windows, могут посылать текстовые команды в контроллер СЕРВОСИЛА через этот виртуальный COM-порт, а также получать обратно телеметрию в текстовом виде. Обмен данными происходит через стандартный текстовый протокол SLCAN.
Управляющие пользовательские программы, работающие под Windows, могут посылать текстовые команды в контроллер СЕРВОСИЛА через этот виртуальный COM-порт, а также получать обратно телеметрию в текстовом виде. Обмен данными происходит через стандартный текстовый протокол SLCAN.
Подключенный по USB 2.0 контроллер также выполняет роль USB-to-CAN шлюза и позволяет обеспечить доступ управляющих компьютеров с ОС Windows или ОС Linux ко всей сети CAN. Таким образом, через единый интерфейс USB 2.0 к компьютеру с ОС Windows или Linux можно подключить «гирлянду» контроллеров СЕРВОСИЛА для управления целым комплексом электроприводов, например, в составе испытательного стенда, АСУ ТП или мобильного робота, а также любые другие устройства, поддерживающие шину CAN, например, инерциальные датчики или GPS приемник.
К ОС Linux контроллеры СЕРВОСИЛА подключаются либо по интерфейсу CAN, либо по интерфейсу USB 2.0. В случае подключения по CAN управляющие пользовательские программы могут использовать стандартный Linux SocketCAN API для посылки команд в контроллеры СЕРВОСИЛА и для получения телеметрии в обратном направлении. В сети Интернет можно найти примеры исходного кода множества программ, работающих через SocketCAN API.
В сети Интернет можно найти примеры исходного кода множества программ, работающих через SocketCAN API.
Если же контроллер СЕРВОСИЛА подключен к Linux через интерфейс USB 2.0 (а не через CAN), то контроллер идентифицируется в Linux, как виртуальный COM-порт, также, как и в ОС Windows. В этом случае управляющие пользовательские программы могут использовать либо стандартный Linux SocketCAN API через встроенный в Linux драйвер SLCANd, либо же работать с виртуальным COM-портом напрямую с использованием стандартного текстового протокола команд SLCAN.
При подключении через USB 2.0 к ОС Linux контроллер также может выполнять функцию USB-to-CAN шлюза и обеспечить доступ ОС Linux ко всей сети CAN. Эта функция полезна в случае, если управляющая компьютерная система с ОС Linux не имеет своего собственного физического CAN порта. В этом случае контроллеры СЕРВОСИЛА могут играть вспомогательную роль интерфейсного адаптера USB-в-CAN.
Для разработки программ, управляющих контроллерами СЕРВОСИЛА через CAN или USB 2. 0, в общем случае не требуются какие-либо специализированные библиотеки, SDK или средства разработки кроме тех, которые уже имеются в стандартных ОС Linux и Windows. Разрабатывать программы можно на языках C/C++, Java, Python, MATLAB, или любых других, которые могут работать с виртуальными COM-портами, со стандартным SocketCAN API в Linux, или же программных пакетов или ПЛК, которые уже имеют встроенную поддержку CANopen, например, LabView.
0, в общем случае не требуются какие-либо специализированные библиотеки, SDK или средства разработки кроме тех, которые уже имеются в стандартных ОС Linux и Windows. Разрабатывать программы можно на языках C/C++, Java, Python, MATLAB, или любых других, которые могут работать с виртуальными COM-портами, со стандартным SocketCAN API в Linux, или же программных пакетов или ПЛК, которые уже имеют встроенную поддержку CANopen, например, LabView.
Программное обеспечение «Сервоскоп»
В комплект поставки входит программное обеспечение «Сервоскоп», которое автоматизирует процесс настройки контроллеров под конкретный электродвигатель и позволяет строить графики и получать отладочную телеметрию с электроприводов по сети CAN или USB 2.0. Данное графическое программное обеспечение работает как под ОС Windows 10/8, так и под ОС Linux, в том числе, на популярных дистрибутивах Debian и Ubuntu. Установка драйверов не требуется.
Симулятор электроприводов
Для упрощения отладки пользовательского управляющего программного обеспечения в комплект поставки входит программный симулятор контроллера СЕРВОСИЛА. Программный симулятор распространяется бесплатно в составе программного обеспечения «Сервоскоп». Этот симулятор полностью воспроизводит управляющий интерфейс CAN/CANopen контроллеров СЕРВОСИЛА и позволяет отлаживать пользовательское программное обеспечение управления электроприводом без риска повредить реальный электродвигатель или редуктор электропривода.
Программный симулятор распространяется бесплатно в составе программного обеспечения «Сервоскоп». Этот симулятор полностью воспроизводит управляющий интерфейс CAN/CANopen контроллеров СЕРВОСИЛА и позволяет отлаживать пользовательское программное обеспечение управления электроприводом без риска повредить реальный электродвигатель или редуктор электропривода.
Поддерживаемые типы двигателей
- Бесколлекторые синхронные двигатели (brushless): PMSM, BLDC, Direct Drive, Gimbal, как с датчиками Холла, так и бездатчиковые.
- Коллекторные двигатели (brushed), в том числе, с энкодерами для измерения скорости и положения.
- Соленоиды.
Режимы управления электродвигателями
- Стабилизация момента на валу.
- Стабилизация скорости (ESC).
- Сервоуправление.
- Прямое управление (Direct Drive).
- Тормоз вала.
- Рекуперация (электрогенератор).
- Системная идентификция (автонастройка).
Встроенные алгоритмы управления электродвигателями
- Field-Oriented Control (FOC),
- EMF Observer,
- Hall Sensors Observer,
- D-Q axis Coupling Compensation,
- Field Weakening,
- Защиты,
- Управление динамикой разгона-торможения.
Количество последовательно подключенных контроллеров («гирлянда») в единой цепочке управления и питания:
- До 127 шт через шину CAN.
- До 16 шт через встроенный USB-to-CAN шлюз.
Функции GPIO интерфейса
- 2 шт. входов для концевых выключателей
- 1 шт. вход для emergency stop
- 1 шт. выход GPIO (дискретный или ШИМ)
- 1 шт. вход GPIO (дискретный)
Интерфейсы и API для программного управления
- Linux SocketCAN API,
- CANopen,
- Текстовый протокол SLCAN через виртуальный COM-порт (USB2.0) для Windows 10, 8 и Linux.
| Бездатчиковое управление | Да |
| Возможные варианты скорости передачи данных по шине CAN | 1 мбит/сек, 500, 250, 125, 100, 50 кбит/сек |
| Встроенный шлюз сетей управления | USB-to-CAN шлюз(11-битные и 29-битные) |
| Входное напряжение питания | 7-60 V DC |
| Высота | 16 мм |
| Диаметр | 62 мм |
| Интерфейс энкодера BISS/C | Да |
| Интерфейс энкодера SPI | Да |
| Интерфейс энкодера SSI | Да |
| Интерфейс энкодера Квадратурный с индексным сигналом | Да |
| Интерфейс энкодера ШИМ | Да |
| Количество CAN портов | 2 шт.(параллельные) |
| Количество USB 2.0 портов | 1 шт. |
| Максимальное разрешение датчика положения вала | 20 бит |
| Максимальный ток через фазу двигателя | 25 А(желательно с радиатором) |
| Масса | ~ 23 грамма |
| Номинальный (рекомендуемый) ток через фазу двигателя | 15 А(желательно с радиатором), 12 А(без радиатора) |
| Поддерживаемые операционные системы | Windows, Linux:Debian, Ubuntu, Astra, Raspberry PI |
| Прямое управление (Direct Drive) | Да |
| Режим «Тормоз» | Да |
| Режим сервоуправления | Да |
| Режим стабилизации момента | Да |
| Режим стабилизации скорости (ESC) | Да |
| Рекуперация энергии в батарею | Да |
| Системная идентификция (автонастройка) | Да |
| Терминальное сопротивление 120 Ом для шины CAN | Есть. Включается-выключается посредством джампера. Включается-выключается посредством джампера. |
| Управление по датчикам Холла (Sensored) | Да |
| Управляющие интерфейсы | Шина CAN, USB2.0 |
| Функция «D-Q Coupling Compensation» | Да |
| Функция «Field Oriented Control» | Да |
| Функция «Field Weakening» | Да |
| Функция автонастройки под электродвигатель | Есть |
| Энергопотребление в режиме ожидания при неработающем двигателе | 80-120 мА |
| Вес, г | 50 |
Регуляторы хода для бесколлекторных моторов
RC Design / Статьи / Аппаратура Радиоуправления
Автор — Сергей Потупчик (serj)
- Вступление
- Основные характеристики контроллеров
- Особенности подключения
- Настройки
- Программирование
- Возможные проблемы
- О выключателях
- Производители контроллеров
- Заключение
Вступление
Данная статья посвящена практическим аспектам применения регуляторов хода (далее — контроллеров) для бесколлекторных моторов, и особенностям их эксплуатации.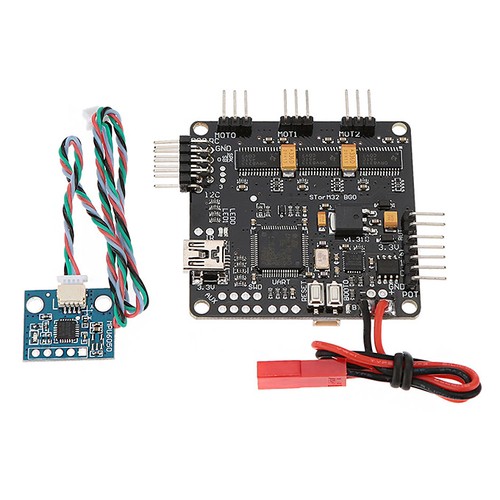
Бесколлекторные моторы, и соответственно регуляторы хода для них можно разделить на 2 основных класса — с датчиками положения ротора и без них. Бездатчиковые проще в изготовлении, поэтому большинство моторов и контроллеров в настоящее время именно такие (кроме специальных автомодельных). Далее речь пойдет именно о бездатчиковых регуляторах хода.
Большинство применяемых в моделизме бесколлекторных моторов построены по принципу «вывернутого наизнанку» коллекторного двигателя: статор с обмотками неподвижен, а ротор с постоянными магнитами вращается. Количество обмоток – всегда три.
Среди бесколлекторных моторов для моделизма можно выделить две основные группы — с внутренним ротором, где постоянный магнит вращается внутри обмоток, и с внешним ротором (outrunner). Последние имеют, как правило, большее количество магнитных полюсов, и больший крутящий момент по сравнению с моторами с внутренним ротором, что позволяет применять их на авиамоделях без использования редуктора — они могут «напрямую» крутить винты большого диаметра.
Основные характеристики контроллеров
Максимальный постоянный (сontinius) ток – указывает, какой ток контроллер способен держать продолжительное время. Как правило, этот параметр входит в обозначение контроллера (например Jes -18, Phoenix -10). Иногда указывают величину «кратковременного» тока, допустимого в течении нескольких секунд.
«Кратковременный» ток способны держать выходные транзисторы контроллера, но рассеивать выделяемое при этом токе количество тепла контроллер не в состоянии.
Максимальное рабочее напряжение — указывается, с каким количеством NiCd или литий-полимерных банок можно использовать контроллер. Для контроллеров с ВЕС-ом, эта величина может быть разная, в зависимости от количества сервомашинок. Это связано с рассеиванием тепла стабилизатором схемы ВЕС — при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера.
Это связано с рассеиванием тепла стабилизатором схемы ВЕС — при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера.
Максимальные обороты (maximum rpm) — программное ограничение максимальных оборотов. Всегда указывается для двухполюсного двигателя. Для многополюсных моторов это число надо разделить на количество пар полюсов. Например, если указано 63000 rpm, то для мотора с 12-ю магнитами максимальные обороты будут 63000/6=10500 rpm, а это уже не так много… Данная функция не дает мотору набрать большее, чем указано количество оборотов, некоторые контроллеры при превышении этого значения на холостом ходу начинают сбоить, вызывая значительные броски тока — мотор начинает резко дергаться. Этот эффект не является признаком неисправности мотора ли контроллера.
Этот эффект не является признаком неисправности мотора ли контроллера.
Внутреннее сопротивление – полное сопротивление силовых ключей контроллера, без учета проводов. Чем мощнее контроллер, тем меньше его внутреннее сопротивление. Как правило, сопротивление проводов сравнимо с внутренним сопротивлением контроллера и вносит до 30% потерь. Для примера, внутреннее сопротивление контроллера Castle Creations Phoenix-25 13 mOhm, а сопротивление 30 см провода сечением 1кв.мм – 6 mOhm, то есть почти треть потерь приходится на провода.
Частота импульсов контроллера (PWM Frequency) — как правило, составляет 7-8 Кгц. У «продвинутых» контроллеров частоту регулирования можно программировать на другие значения- 16 и 32 Кгц. Эти значения применяется в основном для высокооборотных 3-4-х витковых моторов с малой индуктивностью, при этом улучшается линейность регулирования частоты вращения.
Особенности подключения
Провода — не такое простое дело, как может показаться на первый взгляд.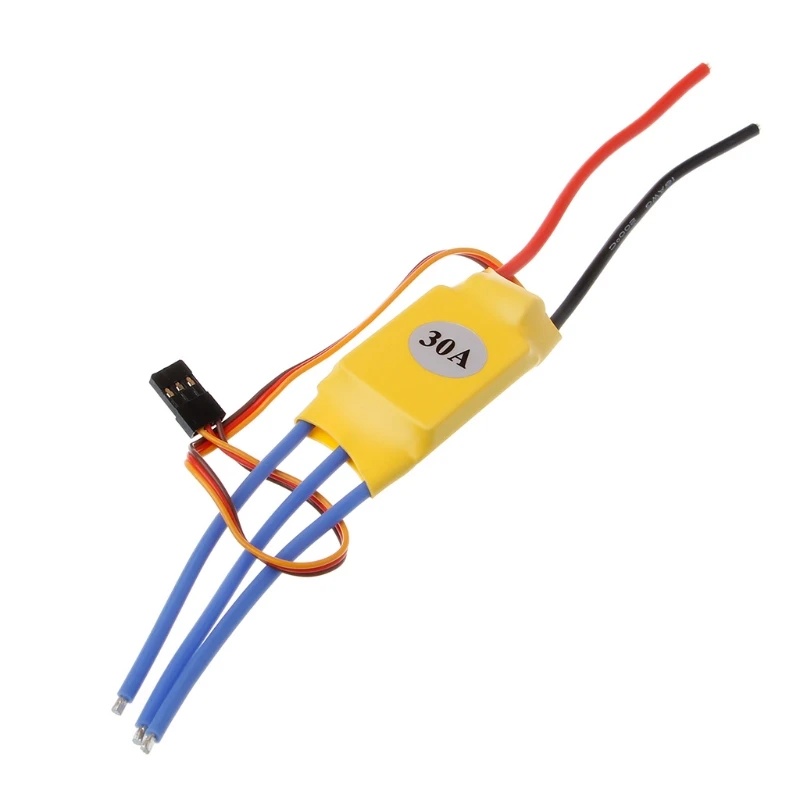 Есть несколько важных аспектов.
Есть несколько важных аспектов.
Самое главное — нельзя делать провода от контроллера до аккумулятора большой длины! Дело в том, что стартовые токи беколлекторных моторов намного больше, чем аналогичных коллекторных, и при работе моторов возникают большие броски тока. Конденсаторы, всегда стоящие на входе контроллера, должны быть специального типа, но многие производители ставят обычные.
При удлинении проводов от контроллера до батареи начинает сказываться их индуктивность, и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и «повисает» процессор контроллера). Известно несколько случаев полного «выгорания в дым» контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера.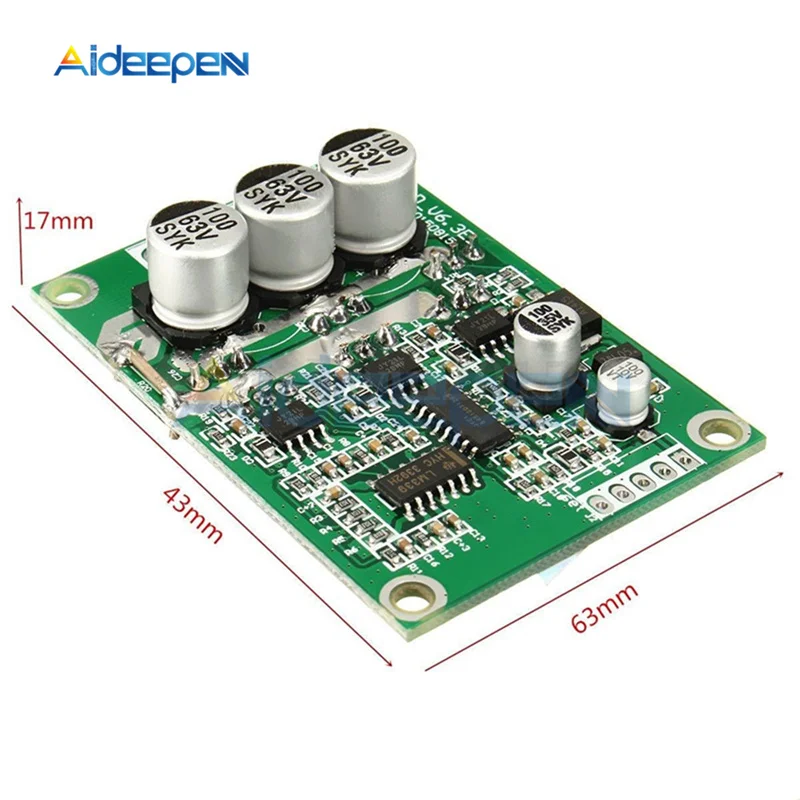 Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Кроме того, длинные провода до батареи могут вызывать проблемы при резком старте мотора — контроллер может не перейти от режима старта к рабочему режиму при слишком резком прибавлении “газа”. Для предотвращения этого эффекта во многих контроллерах есть специальные настройки.
Настройки
Практически все современные контроллеры имеют множество программных настроек. От них зависит режим работы, надежность, а иногда и работоспособность контроллера в паре с тем или иным мотором. Здесь мы попробуем перечислить основные настройки, и объяснить, как и на что они влияют.
Напряжение выключения мотора (cut-off voltage) – при каком минимальном напряжении на батарее мотор будет выключен. Эта функция предназначена для сохранения работоспособности аппаратуры при разряде батареи и для защиты самой батареи от переразряда (последнее особенно важно для литий- полимерных аккумуляторов). На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
Тип выключения мотора (cut-off voltage) – как правило имеет 2 значения — плавный (soft cut-off) и жесткий (hard cut-off).
При плавном выключении мотора контроллер сбрасывает обороты постепенно, не позволяя напряжению на батарее упасть ниже заданного, при этом контроль над моделью сохраняется до последнего.
При жестком — мотор немедленно останавливается если зафиксированно падение напряжения ниже заданного. Жесткое отключение может доставить некоторые неудобства при разряженном аккумуляторе: манипулируя газом, вместо небольшой прибавки оборотов иногда получается полный останов мотора.
Тормоз (brake) – торможение мотора после установки газа в «ноль». Может иметь значения включен/выключен, на некоторых контроллерах есть еще программируемая величина тормоза 50-100% и задержка включения тормоза после полного сброса газа. Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии «Advanced» тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот… Намудрили чехи, однако.
Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии «Advanced» тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот… Намудрили чехи, однако.
Опережение (Timing) – параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
Для двухполюсных моторов при увеличении опережения обороты и мощность на максимальных оборотах растут, а общий КПД падает. Для двух и 4-х полюсных моторов с внутренним ротором рекомендуют значения от 5 до 15 градусов. При больших значениях опережения мощность практически не растет, а КПД падает на 3-5% — это важно для соревнований, где счет идет именно на эти проценты.
Для многополюсных моторов с внешним ротором ситуация иная — для них оптимальным по КПД и мощности является опережение 25-30°. При изменении угла опережения от 5 до 25° растут и КПД и выходная мощность. Однако прирост этот невелик — около 3%. Как говорится — в полете не заметно, но осознавать приятно…
При изменении угла опережения от 5 до 25° растут и КПД и выходная мощность. Однако прирост этот невелик — около 3%. Как говорится — в полете не заметно, но осознавать приятно…
Режим старта (start mode) — не имеет как правило каких-то числовых значений, описывается только как мягкий, (soft) жесткий (hard), быстрый (fast) и пр. Быстрый старт рекомендуется для моторов без редукторов и для использования в соревнованиях. При использовании быстрого старта в моторах с редукторами возможно повреждение шестерен. Плавный старт обеспечивает меньшие пусковые токи в момент старта и позволяет избежать возможных перегрузок по току контроллера, но время раскрутки мотора до полных оборотов увеличивается.
Время акселерации или задержка акселерации (acseleleration time или acseleration delay) – устанавливает время набора оборотов после старта до максимума. Устанавливается меньше для моторов с легкими пропеллерами без редукторов и больше для моторов с редукторами и в случае срабатывания защиты по току при резком прибавлении газа.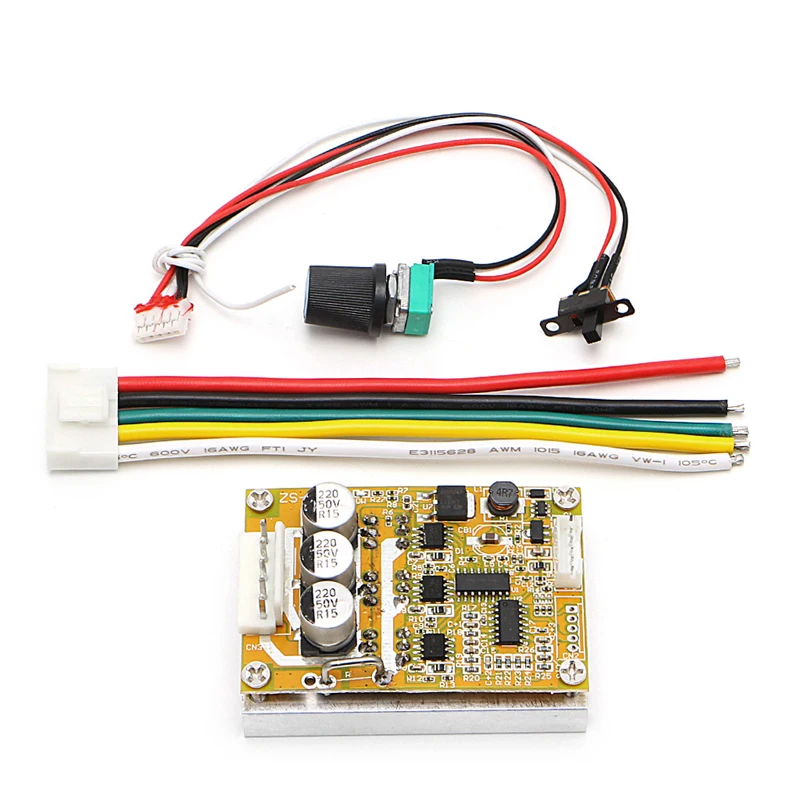
Ограничение тока (Curent limiting) – уровень срабатывания защиты по току. Устанавливается более чувствительным в случае применения моторов с большим стартовым током и батарей с высоким внутренним сопротивлением. При этом желательно установить плавное отключение мотора, в противном случае при резких манипуляциях газом мотор будет останавливаться. Не рекомендуется отключать защиту по току, если вы не уверены ,что ток мотора не может превысить максимально допустимое значение для контроллера. Это может привести к повреждению контроллера большими стартовыми токами.
Режим газа (throttle type или throttle mode) – устанавливает зависимость оборотов мотора от ручки газа. Может иметь значения автокалибровки ( auto calibrating ) – при этом контроллер самостоятельно определяет положение малого и полного газа, а также фиксированный ( fixed ) — когда характеристика задана производителем.
Также в некоторых контроллерах присутствует режим «гувернер» (governor), он предназначен для вертолетов, когда положению ручки газа соответствуют определенные обороты, а не мощность двигателя, контроллер в данном режиме работает как автоматическая система поддержания оборотов, прибавляя мощность при увеличении нагрузки на двигатель.
Реверс (reverse) — смена направления вращения. Обычно для изменения направления вращения двигателя надо поменять местами любые два провода от мотора. Но в продвинутых контроллерах, возможно изменить направление вращения мотора программно.
В некоторых контроллерах, например в Kontronik серии «Beat», нет отдельных настроек параметров, но есть выбор комплексных режимов – планер, самолет, корабль, вертолет и даже автомобиль с задним ходом!
Программирование
Тут совет один — читайте внимательно инструкцию. Как правило, вход в режим программирования делается таким образом, что при нормальном использовании включить его очень затруднительно. В некоторых контроллерах для программирования есть специальные перемычки (джамперы), а создатели Castle Creations предусмотрели кроме обычного (с передатчика), программирование через компьютер, с помощью специального USB адаптера, подключаемого к контроллеру через разъем для приемника — просто и гораздо удобней, чем считать вспышки светодиода или писки мотора. ..
..
Из нюансов следует отметить, что у некоторых контроллеров, например ТММ, процедуру программирования следует провести до конца — все параметры записываются в конце цикла программирования, а у других — например Castle Creations — программирование можно закончить в любой момент.
Возможные проблемы
Как показывает практика — 70% проблем при использовании контроллеров связано со стартом двигателей. Если мотор у вас плохо стартует, то есть начинает вращаться, а потом останавливается — большинство причин кроется в больших бросках тока и как следствие, провалах питающего напряжения. В первую очередь проверьте провода до батареи. Пробную проверку лучше производить на той длине проводов, которые даны изготовителем, или короче.
Далее — попробуйте снять нагрузку с мотора и проверить его на холостом ходу. Если на хостом ходу все в порядке, а при установке пропеллера мотор упорно не желает крутится, только дергается в одном направлении, попробуйте поставить мягкий старт или увеличить время акселерации.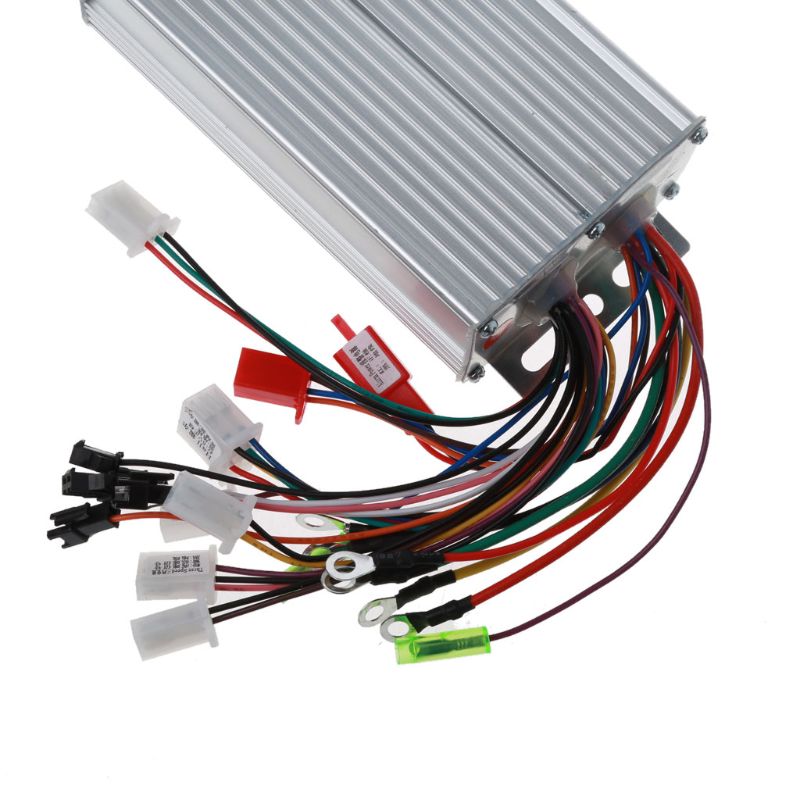 Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет…
Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет…
Старые «золотые» Jeti серия Jes 18, отличаются, например одной особенностью — у них нет плавного выключения, и при попытке работы мотора с большими пусковыми токами от старых аккумуляторов, при резком движении ручкой газа мотор останавливается, если напряжение упало до 5.2 вольта. Это не неисправность контроллеров, это у них такой алгоритм выключения мотора: напряжение упало — мотор остановился…
Иногда бывает, что мотор стартует в другую сторону, набирает примерно 20-30% оборотов, потом «одумывается», и резко начинает крутится в нужном направлении. Останов и реверс сопровождаются резким броском тока, иногда срабатывает токовая защита. Данная ситуация происходит только с 2-3х витковыми двухполюсными спортивными моторами при наличии резкого старта. Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации — опять же использование плавного старта.
Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации — опять же использование плавного старта.
О выключателях
Наличие выключателя в контроллере — это дополнительное удобство, позволяющее не залезать каждый раз вовнутрь модели, чтобы включить или выключить аппаратуру. Некоторые производители контроллеров не ставят выключателей на контроллеры предназначенные для токов ниже 40А, таковы например Castle Creations и Astro Flight.
Привлекает решение проблемы выключателей у контроллеров ТММ. У них каждая модель имеет версию с выключателем и без. Причем выключатель электронный, работает на размыкание, и если он в полете случайно оторвется (что вообще-то трудно себе представить) то контроллер и аппаратура останется включенной. Если контроллер ТММ забыть выключить, он при отсутствии сигнала с приемника начнет попискивать мотором. Подобная функция есть и у Astro Flight.
Про «выключатель» у контроллеров Jeti уже упоминалось в статье про литий- полимерные аккумуляторы, он выключает лишь питание приемника, контроллер при этом всегда включен. И не подает никаких сигналов об этом постепенно разряжая «в ноль» батарею, что для литиевых аккумуляторов заканчивается фатально.
И не подает никаких сигналов об этом постепенно разряжая «в ноль» батарею, что для литиевых аккумуляторов заканчивается фатально.
Производители контроллеров
Лидером в производстве профессиональных контроллеров для спортсменов является, конечно же Schulze Electronik – на этих контроллерах летает, плавает и ездит большинство спортсменов. Однако это и самые дорогие контроллеры.
Далее в списке популярности стоит Castle Creations – сравнительно молодая фирма (основана в 1997г), специализирующаяся исключительно на выпуске регуляторов хода. В Америке она является лидером по количеству продаж.
Также профессиональные, но опять-таки довольно дорогие контроллеры для спортсменов делает немецкая фирма Kontronik.
Продукция чешских фирм MGM Compro (это их контроллеры называются TMM) и Jeti Models (они же делают контроллеры для фирмы Hacker motors) ориентирована в основном на рынок хобби.
Американская фирма Astro Flight, специализирующаяся на выпуске электромоторов для моделизма, также делает контроллеры к своим моторам, однако отдельно от моторов найти их в продаже проблемматично…
При выборе контроллера главный совет — внимательно изучите все характеристики приглянувшейся вам модели. У некоторых фирм, например Jeti models и MGM Compro (TMM), контроллеры на один и тот же ток и напряжение могут быть с разными версиями программного обеспечения и иметь разное число настроек. Если вы планируете использовать литий-полимерные аккумуляторы — контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
Если вы планируете использовать литий-полимерные аккумуляторы — контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
Заключение
Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления… Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня…
Обсудить на форуме
Контроллер бесколлекторного двигателя своими руками
Итак, сегодня у нас будет контрольная. Схема самодельный драйвер бесколлекторного. Регулятор скорости бесколлекторного. Драйвера mosfet ключей. Для двигателей.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Регулятор оборотов коллекторного двигателя своими руками
- roboforum.ru
- Схема регулятора скорости бесколлекторного двигателя (ESC)
- Бесколлекторный двигатель своими руками – Создание и тестирование бесколлекторного мотора / Habr
- Регулятор бесколлекторного двигателя — усовершенствование
- Бесколлекторные двигатели» ЛикБез и проектирование
- Прямой эфир
- Шим контроллер на бесколлекторный двигатель своими руками
- Please turn JavaScript on and reload the page.
- Контроллер своими руками из cd-rom

ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: контроллер bldc
Регулятор оборотов коллекторного двигателя своими руками
В настоящее время коллекторные двигатели получили широкое применение в быту и на производстве. Такие электромеханические устройства могут быть как постоянного, так и переменного тока. В зависимости от их предназначения возникает необходимость в изменении скорости вращения оборотов электродвигателя.
С такой задачей может справиться тиристорный регулятор напряжения или симисторный регулятор мощности для электродвигателя. Коллекторный двигатель КД представляет собой электрическую машину, которая преобразовывает электрическую энергию в механическую и обратно.
Классифицируются КД по роду питающего тока, их разделяют на следующие группы:. КД постоянного тока в зависимости от типа индуктора могут быть на постоянных магнитах или дополнительных катушках возбуждения.
Постоянные магниты создают необходимый магнитный поток, способствующий образованию вращающего момента. Двигатели, где применяются катушки возбуждения, различаются по типу обмоток. Для регулировки скорости вращения вала электродвигателя, используются различные электрические схемы регуляторов оборотов коллекторных двигателей.
Существует несколько типов управляющих схем для регулировки оборотов коллекторных двигателей. Для маломощных устройств с напряжением питания 12 В вольт можно использовать реостат или простейшую схему, собранную на транзисторе, за основу которой можно взять любой компенсационный стабилизатор постоянного тока с регулировкой напряжения.
Для плавной регулировки оборотов якоря более мощного КД необходим тиристорный регулятор напряжения постоянного тока. Для протекания тока через тиристор необходимо на его управляющий электрод подать кратковременный импульс. В зависимости от частоты поданных импульсов создаётся порог открывания тиристора , что изменяет величину напряжения на выходе регулятора оборотов.
Для протекания тока через тиристор необходимо на его управляющий электрод подать кратковременный импульс. В зависимости от частоты поданных импульсов создаётся порог открывания тиристора , что изменяет величину напряжения на выходе регулятора оборотов.
Частоту импульсов можно изменять, включив в схему регулятора генераторный транзистор, например, КТ, или собрать схему управления на таймере КРВИ1 отечественного производства. Такой регулятор постоянного тока можно использовать только с КД постоянного напряжения.
Используя тиристоры в высокоиндуктивной нагрузке, так как они могут не до конца закрыться, чревато для выхода из строя регулятора. Регулировку рекомендуется производить с помощью регулятора оборотов коллекторного двигателя с обратной связью, который задаёт скорость вращения с помощью формирователя опорного напряжения в схеме.
В момент нагрузки скорость вращения снижается, а вместе с ней вращающий момент. За счёт уменьшения противо-ЭДС между управляющим электродом и катодом тиристора возникшей в двигателе пропорционально увеличится напряжение управления на тиристоре. Увеличение величины напряжения, с малым фазовым углом, открывается тиристор и подаёт на двигатель максимальный ток.
Увеличение величины напряжения, с малым фазовым углом, открывается тиристор и подаёт на двигатель максимальный ток.
Тиристор подбирается таким образом, чтобы пусковой ток КД не превышал его максимально допустимые параметры. Регулировку можно производить только на КД состоящих из щёточного узла.
Тиристорный регулятор по схематическим соображениям не может регулировать обороты асинхронных электродвигателей. С виду бесколлекторный двигатель схож с КД, но по конструктивным особенностям имеется различие из-за отсутствия коллектора и щёток. В бесколлекторном двигателе постоянные магниты расположены вокруг вала, так называемого ротора, а обмотки находятся непосредственно на статоре вокруг ротора и имеют определённое количество пар полюсов, от которых зависит скорость мотора.
Некоторые бесколлекторные моторы оснащаются сенсорными датчиками , предназначенными для слежения за положением ротора, и управляются электронными регуляторами скорости, собранными на контроллере. Основными достоинствами бесколлекторных моторов являются отсутствие искрения щёток , создающих помехи, и отсутствие постоянного трения, повышающего температуру внутри двигателя.
Отсутствие изнашивающихся частей — коллектора и щёток — увеличивает срок эксплуатации таких моторов, не считая замены подшипников. К недостаткам можно отнести лишь высокую стоимость изделия. Особой популярностью пользуются однофазные асинхронные двигатели переменного тока, которые используют в различных станках на производстве, а также в бытовых электроприборах, где необходимо использовать разные скорости вращения. Для этих целей используется симисторный регулятор мощности для электродвигателя.
Регулятор оборотов асинхронного двигателя своими руками можно сделать на ШИМ-контроллере tda, который управляет симистором. Контроллер можно использовать для управления стиральной машиной совместно с таходатчиком, который считывает импульсы от тахогенератора.
Регулирование оборотов осуществляется без потери мощности и независимо от нагрузки. Добавить комментарий Не отвечать.
Уважаемые читатели! Мы не приемлем в комментариях мат, оскорбления других участников, спам и ссылки на сторонние ресурсы, враждебные заявления в сторону администрации и посетителей ресурса. Комментарии, нарушающие правила сайта, будут удалены. Следить за комментариями этой статьи. Если Вам нравятся статьи, подпишитесь на наш канал в Яндекс Дзене, чтобы не пропустить свежие публикации.
Комментарии, нарушающие правила сайта, будут удалены. Следить за комментариями этой статьи. Если Вам нравятся статьи, подпишитесь на наш канал в Яндекс Дзене, чтобы не пропустить свежие публикации.
Вы с нами? Главная Без рубрики Регулятор оборотов коллекторного двигателя своими руками. Без рубрики Для производства Законодательство и законы Измерения и расчёт Интересное Кабель и провода Освещение Основы электротехники Полезно знать Полезные советы Электрика в квартире Электрооборудование. Регулятор оборотов коллекторного двигателя своими руками.
Содержание 1 Коллекторные электродвигатели. Автор: admin Распечатать Оцените статью:. Войти с помощью:. Задать вопрос эксперту. В ближайшее время мы опубликуем информацию.
roboforum.ru
В настоящее время коллекторные двигатели получили широкое применение в быту и на производстве. Такие электромеханические устройства могут быть как постоянного, так и переменного тока. В зависимости от их предназначения возникает необходимость в изменении скорости вращения оборотов электродвигателя. С такой задачей может справиться тиристорный регулятор напряжения или симисторный регулятор мощности для электродвигателя. Коллекторный двигатель КД представляет собой электрическую машину, которая преобразовывает электрическую энергию в механическую и обратно. Классифицируются КД по роду питающего тока, их разделяют на следующие группы:.
С такой задачей может справиться тиристорный регулятор напряжения или симисторный регулятор мощности для электродвигателя. Коллекторный двигатель КД представляет собой электрическую машину, которая преобразовывает электрическую энергию в механическую и обратно. Классифицируются КД по роду питающего тока, их разделяют на следующие группы:.
Регулятор хода бесколлекторного двигателя BLMC-SLА случае это мкф на 25В, но вполне достаточно мкф, просто не было под рукой).
Схема регулятора скорости бесколлекторного двигателя (ESC)
Как вы уже знаете из прошлых постов, у нас в компании есть DIY-движение. В свободное от работы время коллеги занимаются фрезеровкой печатных плат в домашних условиях , делают тепловизор на FLIR Lepton , а также решают семейные разногласия с помощью 4 контроллеров и 2 умных часов. Продолжим серию увлекательный историй! Сегодня я расскажу, как сделать контроллер к трехфазному двигателю электровелосипеда своими руками. Целью создания такого контроллера было:.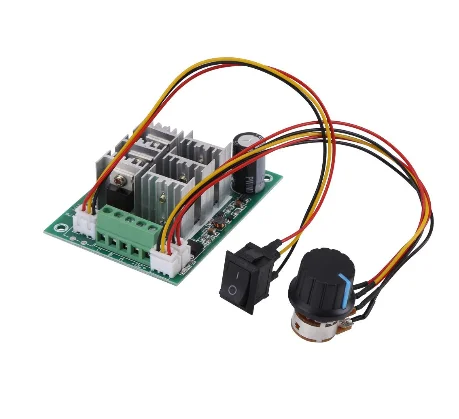 В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — тыс.
В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — тыс.
Бесколлекторный двигатель своими руками – Создание и тестирование бесколлекторного мотора / Habr
В большинстве вращающихся электронных проборов используется коллекторный двигатель. Он позволяет получить необходимый в некоторых случаях высокий пусковой момент. Принцип его работы основан на вращении ротора под воздействием магнитного поля статора, на который подается напряжение. Для того чтобы получить подходящую скорость вращения без потери мощности необходимо устройство контроля за скоростью вращения.
Авторизация Зарегистрироваться Логин или эл.
Регулятор бесколлекторного двигателя — усовершенствование
Преимущества бесколлекторных двигателей по сравнению с бензиновыми двигателями. Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока. Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. В коллекторном двигателе наоборот, обмотки находятся на роторе.
Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока. Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. В коллекторном двигателе наоборот, обмотки находятся на роторе.
Бесколлекторные двигатели» ЛикБез и проектирование
Выключение двигателя через определенное количество оборотов PIC 16f Двигатель с датчиком кол-ва оборотов. Выключить двигатель через 2 оборота. Для этого я решил присобачить схему простейшего Автоматический регулятор оборотов минидрели вчерась случайно наткнулся на вот эту статью а конкретно на схему Илександъра Савова. Драйвер бесколлекторного двигателя Здравствуйте, коллеги! Заказал себе бесколлекторный двигатель током А, но не заказал
Для этого понадобятся: бесколлекторный двигатель, электронный регулятор хода управления двигателем, батарейный блок, блок радиоуправления и контроллер Arduino Nano. . Своими руками:) 36 в Блог им.
. Своими руками:) 36 в Блог им.
Прямой эфир
Посмотрите схему контроллера сколько на него концов подключается от этого электродвигателя, может все 4 и без конденсатора? Контроллер трехфазного двигателя для электровелосипеда. Управление мощным двигателем
Шим контроллер на бесколлекторный двигатель своими руками
ВИДЕО ПО ТЕМЕ: Регулятор бесколлекторного двигателя — усовершенствование
Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора. Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока БДПТ эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора.
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов — это далеко не полный перечень областей применения бесколлекторных двигателей БД постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Please turn JavaScript on and reload the page.
Главным преимуществом бесколлекторного двигателя постоянного тока является неимение контактов крутящего момента и переключения. Значит отсутствие источников потерь, как в двигателях с постоянными магнитами. Ранее их стоимость была высокой, поэтому они не были доступны. Сегодня цена стала приемлемой, а показатели значительно улучшились. При отсутствии в системе радиатора, мощность ограничивается от 2,5 до 4 ватт, а ток работы от 10 до 30 Ампер. КПД бесколлекторных электродвигателей очень высокий. Мотор постоянного тока 5 кватт 80 вольт для трамвайчика для детей.
Контроллер своими руками из cd-rom
Управляемый контроль тока мотора.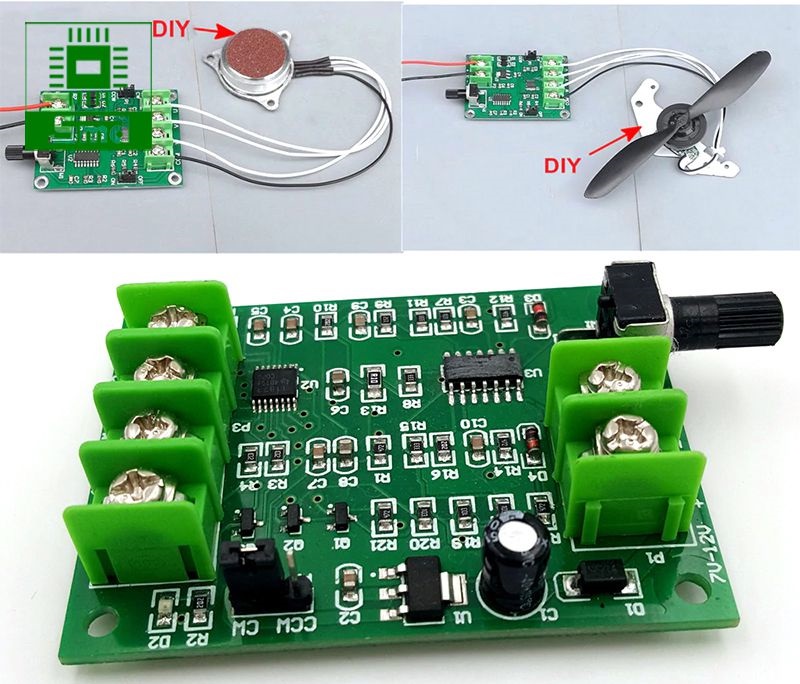 Как ограничение по максимальному току, так и оперативное управление предельным током мотора. Диапазон контроля токов 0.
Как ограничение по максимальному току, так и оперативное управление предельным током мотора. Диапазон контроля токов 0.
Контроллеры бесщеточных двигателей постоянного тока
Серводвигатель? Хаб Мотор? Инраннер или Аутраннер? От нескольких ватт до 30 кВт, если ваш двигатель имеет постоянные магниты и имеет 3 провода питания, у Roboteq есть один или несколько контроллеров, которые заставят его вращаться. Независимо от размера вашего двигателя или конфигурации канала, просто сопоставьте номинальные значения напряжения и тока, используя приведенные ниже таблицы продуктов, или воспользуйтесь поиском продуктов Roboteq.
Семейство SBL
Маломощный/компактный
KBL/MBL Family
Средняя мощность
Семейство FBL
Дополнительные функции
Семейство GBL
Очень высокая мощность
Перейти к выбору продуктов
Купить продукты
Мобильные роботы нуждаются в двух двигателях для движения и управления.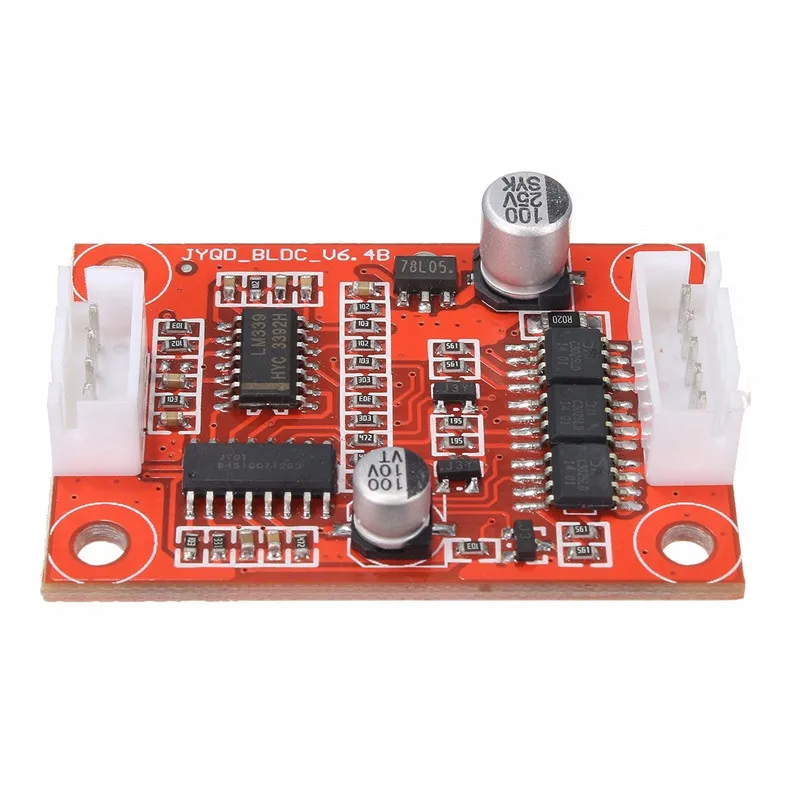 Только Roboteq может сделать это с помощью одного контроллера. По сравнению с традиционным подходом «Один двигатель/один контроллер» двухканальный вариант проще, дешевле и проще в интеграции и обслуживании.
Только Roboteq может сделать это с помощью одного контроллера. По сравнению с традиционным подходом «Один двигатель/один контроллер» двухканальный вариант проще, дешевле и проще в интеграции и обслуживании.
Двигатели координируются внутри контроллера, что обеспечивает превосходные и безопасные характеристики привода.
Два контроллера могут даже объединиться, чтобы управлять 4 двигателями с колесами Mecanum для перемещения всенаправленных роботов. Мы можем показать вам, как это сделать.
Прочитайте наше руководство Mecanum How-to
Добавьте магнитный датчик наведения Roboteq, и вы получите полностью функциональную машину с автоматическим управлением по линии, состоящую всего из двух компонентов.
Сделайте его еще лучше с нашей системой управления литиевыми батареями. Вы можете добавить модуль Robot IO eXtender Module (RIOX) с инерциальным измерительным блоком (IMU) для дополнительной стабильности. Используйте подходящие мотор/колеса в сборе от наших проверенных партнеров по двигателям. Загрузите программное обеспечение для магнитной навигации и получите бесплатную экспертную поддержку от Roboteq, чтобы все это работало на вас.
Загрузите программное обеспечение для магнитной навигации и получите бесплатную экспертную поддержку от Roboteq, чтобы все это работало на вас.
Как построить AGV с магнитным управлением
Узнайте о Robot IO eXtender и IMU
Нашими контроллерами можно управлять практически из любого места. От простых кнопок до джойстиков, радио, ПЛК или компьютеров, Roboteq может взаимодействовать с ним. Имеется большое количество импульсных/аналоговых/цифровых входов для концевых выключателей, потенциометров, энкодеров, кнопок или датчиков. Цифровые выходы обеспечивают торможение, освещение или соленоиды. Нужно больше ИО? Используйте наш RIOX IO eXtender через CANbus и не знайте ограничений!
Контроллеры бесщеточных двигателей работают за счет создания вращающегося магнитного поля внутри катушек двигателя. Затем следуют магниты ротора, вызывая вращение. В дополнение к обычному грубому 6-ступенчатому трапецеидальному вращению контроллеры Roboteq способны к более точному и тихому 512-ступенчатому синусоидальному вращению. Благодаря усовершенствованному полево-ориентированному управлению (FOC) двигатель всегда работает с оптимальной эффективностью.
Благодаря усовершенствованному полево-ориентированному управлению (FOC) двигатель всегда работает с оптимальной эффективностью.
Что такое поле-ориентированное управление?
Знание положения ротора в режиме реального времени необходимо для его плавного и эффективного вращения. Мы поддерживаем практически все известные типы роторных датчиков от самых распространенных до самых точных. Нет датчика? Без проблем! Мы также поддерживаем работу без датчиков.
Как работают бесщеточные двигатели
Вот некоторые из ключевых слов, которые все наши контроллеры понимают благодаря встроенному языку программирования MicroBasic. Думайте об этом как о встроенном ПЛК прямо в контроллер без дополнительной оплаты. Эта эксклюзивная функция Roboteq позволит вам настроить контроллер в соответствии с вашими самыми необычными требованиями.
Узнайте о сценариях MicroBasic
Все наши контроллеры имеют 1-мегабитный интерфейс CANbus.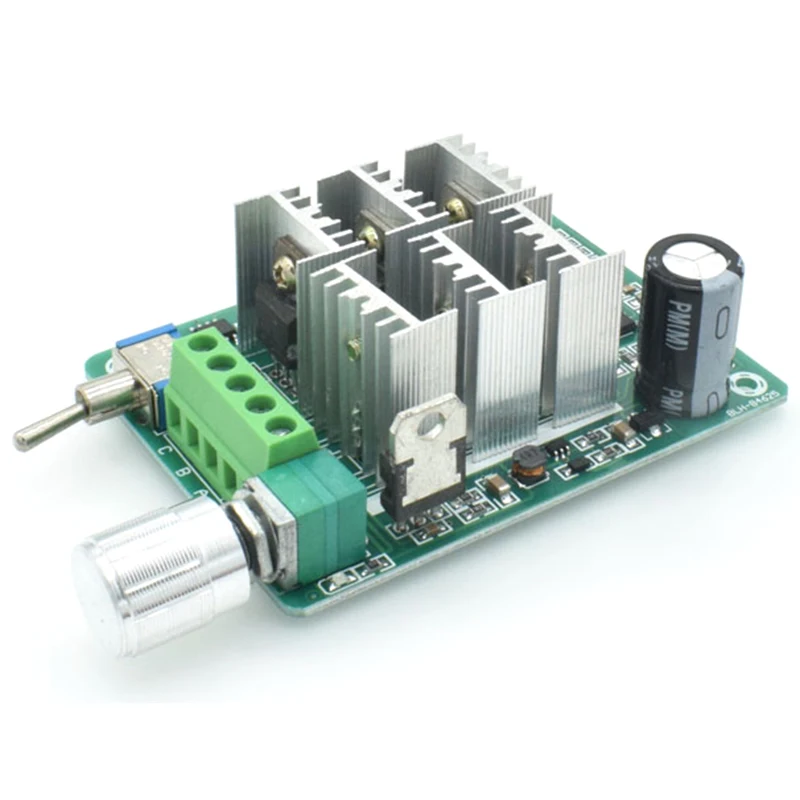 Используя простую пару проводов, вы можете заставить два или более контроллера работать вместе, подключиться к джойстикам, ПЛК, системам управления батареями или любому другому интеллектуальному датчику. А благодаря четырем различным доступным протоколам CAN вы можете быть уверены, что они смогут понять друг друга.
Используя простую пару проводов, вы можете заставить два или более контроллера работать вместе, подключиться к джойстикам, ПЛК, системам управления батареями или любому другому интеллектуальному датчику. А благодаря четырем различным доступным протоколам CAN вы можете быть уверены, что они смогут понять друг друга.
Узнайте о ячеистой сети RoboCAN
Большая часть функций контроллеров Roboteq никогда не используется. Однако эта неиспользуемая функциональность существует, потому что мы все знаем, что в конечном итоге «то, что может пойти не так, пойдет не так». От чрезмерных токов до повышенного/пониженного напряжения, от коротких замыканий до обрыва обратной связи — неожиданности не могут сравниться с бесщеточным контроллером двигателя постоянного тока от Roboteq!
В приложениях для мобильных роботов «Стоп» всегда должен означать остановку. И «Всегда» на самом деле означает всегда, даже если контроллер мотора неисправен и не отвечает. Для этого все большее число наших контроллеров реализуют функцию STO — Safe Torque Off.
Нет необходимости в специальных инструментах программирования. Загрузите нашу бесплатную утилиту Roborun+ для ПК и начните изучать возможности!
Разгонитесь и поддерживайте нужную скорость с желаемым ускорением. Двигайтесь вперед или назад с контролируемым крутящим моментом. Остановитесь именно там, где вам нужно. Потребляйте или восстанавливайте энергию. Благодаря быстрой частоте обновления контура 1 мс, пяти основным режимам работы и множеству настраиваемых параметров наши контроллеры заставят ваш двигатель работать точно, плавно и быстро, как того требует ваше приложение.
Просмотреть все режимы
Высокая мощность при низком напряжении означает большой ток. Большой ток означает тепло. А чрезмерная жара означает беду! Полевые МОП-транзисторы со сверхвысокой эффективностью, сильноточные клеммы и проводка, а также инновационные методы охлаждения — это лишь некоторые из технологий, которые использует Roboteq, чтобы сделать наши контроллеры одними из самых крутых для своего размера.
Подробнее о токах и нагреве
Контроллеры Roboteq продемонстрировали надежность в ходе строгих заводских испытаний и многолетней эксплуатации в тысячах пользовательских приложений. Однако ничто так не иллюстрирует прочность нашего продукта, как этот сильно помятый блок. Он подвергся абсолютной жестокости, пережив более 200 боев боевых роботов, во время которых робота регулярно били, таранили и подбрасывали в воздух на 3 метра!
Прочитайте о качестве Roboteq
Наши контроллеры являются одними из самых сложных, но также и самыми простыми в использовании благодаря подробной документации, программным инструментам и примерам применения. Но если вы столкнетесь с трудностями, вы можете быть уверены, что получите своевременные и точные ответы от нашей высококвалифицированной службы поддержки. В конце концов, мы можем добиться успеха только в том случае, если вы добьетесь успеха!
ЛУЧШИЙ продукт
Я работал со многими контроллерами двигателей, и я должен сказать, что на данный момент это ЛУЧШИЕ из тех, с которыми я работал. Отличная работа над дизайном и программным обеспечением.
Отличная работа над дизайном и программным обеспечением.
Т.К. — США
Лучшая документация
Я занимаюсь разработкой и проектированием продуктов уже довольно много лет, и я считаю, что это лучшее руководство, которое я видел за это время. Он полный, актуальный и пояснительный. Отличная работа!
B.V. – Нидерланды
Маломощные и компактные контроллеры бесщеточных двигателей постоянного тока. Одноканальный или двухканальный. Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 30А и 60В. Нижняя проводящая пластина. Ориентирован на управление машинами и робототехнику. Контроллеры SBL1xxx поддерживают трапециевидный режим и требуют, чтобы датчики Холла приводили в движение двигатели. SBL2xxx также поддерживает синусоидальный режим с полевым управлением.
Посмотреть продукты семейства SBL
Одноканальные бесщеточные контроллеры двигателей постоянного тока средней мощности. Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 120А. Несколько вариантов напряжения до 60В. Кондуктивная охлаждающая пластина с крышкой из АБС-пластика. Ориентирован на управление машинами и робототехнику. Предназначен для AGV и небольших электромобилей. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле. Доступно в базовой версии (MBL1xxx)
Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 120А. Несколько вариантов напряжения до 60В. Кондуктивная охлаждающая пластина с крышкой из АБС-пластика. Ориентирован на управление машинами и робототехнику. Предназначен для AGV и небольших электромобилей. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле. Доступно в базовой версии (MBL1xxx)
Посмотреть продукты семейства KBL/MBL
Очень мощные одноканальные многофункциональные контроллеры бесщеточных двигателей постоянного тока. Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 300 А. Несколько вариантов напряжения до 96В. Охлаждающая пластина с толстой проводимостью с крышкой из АБС-пластика. Предназначен для электромобилей, бронетранспортеров, автомобилей для гольфа, погрузочно-разгрузочного оборудования, электрических лодок, транспортных средств с автоматическим управлением, сельскохозяйственных роботов и других приложений с высокой мощностью. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле.
Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле.
Продукты семейства FBL
Высокомощные одноканальные или среднемощные двухканальные контроллеры бесщеточных двигателей постоянного тока. Усовершенствованная 32-разрядная базовая технология, несколько вариантов подключения и поддержка сценариев. До 2 х 75 А или 1 х 150 А. Несколько вариантов напряжения до 96В. Построен в экструдированном алюминиевом корпусе. Ориентирован на мобильных роботов и небольшие электромобили. Доступен в версиях «Basic» и «Advanced Control». Контроллеры базовой версии работают только в трапециевидном режиме и требуют датчиков Холла для управления двигателями. Модели Advanced Control поддерживают синусоидальный режим и управление, ориентированное на поле.
Посмотреть продукты семейства HBL
Очень мощные двухканальные и одноканальные многофункциональные контроллеры бесщеточных двигателей постоянного тока. Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 2 х 180 А или 1 х 360 А. Несколько вариантов напряжения до 96В. Охлаждающая пластина с толстой проводимостью с крышкой из АБС-пластика. Дополнительное водяное охлаждение. Предназначен для погрузочно-разгрузочного оборудования, автоматизированных транспортных средств, транспортных средств для перевозки личного состава, сельскохозяйственных роботов и других приложений с высокой мощностью. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле.
До 2 х 180 А или 1 х 360 А. Несколько вариантов напряжения до 96В. Охлаждающая пластина с толстой проводимостью с крышкой из АБС-пластика. Дополнительное водяное охлаждение. Предназначен для погрузочно-разгрузочного оборудования, автоматизированных транспортных средств, транспортных средств для перевозки личного состава, сельскохозяйственных роботов и других приложений с высокой мощностью. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле.
Посмотреть продукты семейства GBL
Двухканальные бесщеточные контроллеры двигателей постоянного тока средней мощности. Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 2 х 60А. Кондуктивная охлаждающая пластина с крышкой из АБС-пластика. Предназначен для AGV и небольших электромобилей. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле.
Посмотреть модели семейства OBL
Контроллеры бесщеточных двигателей Kelly — Kelly Controls
KVD — Герметичный трапециевидный контроллер бесщеточного двигателя (24–72 В) (140–380 А)
Программируемые контроллеры двигателей Kelly KVD обеспечивают эффективное, плавное и бесшумное управление электрическими мотоциклами, тележками для гольфа и картингами, а также промышленным управлением двигателями. Он использует высокомощные МОП-транзисторы и ШИМ для достижения эффективности до 99% в большинстве случаев. Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами. Он также позволяет пользователям настраивать параметры, проводить тесты и быстро и легко получать диагностическую информацию. Клиенты могут запрограммировать контроллер KVD с помощью программного обеспечения для ПК и приложения для Android. Теперь у клиентов есть еще один вариант программирования контроллера трапециевидной волны. Программное обеспечение APP основано на планшете с ОС Android. Клиенты могут добавить кабель Z-TEK USB-RS232 для программирования контроллера KVD, если они хотят использовать планшет Android.
Он использует высокомощные МОП-транзисторы и ШИМ для достижения эффективности до 99% в большинстве случаев. Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами. Он также позволяет пользователям настраивать параметры, проводить тесты и быстро и легко получать диагностическую информацию. Клиенты могут запрограммировать контроллер KVD с помощью программного обеспечения для ПК и приложения для Android. Теперь у клиентов есть еще один вариант программирования контроллера трапециевидной волны. Программное обеспечение APP основано на планшете с ОС Android. Клиенты могут добавить кабель Z-TEK USB-RS232 для программирования контроллера KVD, если они хотят использовать планшет Android.
KVD отличается улучшенным корпусом по сравнению с контроллерами KBL с улучшенной гидроизоляцией и защитой от пикового тока.
Рекомендуется для новых клиентов.
KBL — универсальный контроллер бесщеточного двигателя с рекуперацией (12–96 В) (100–400 А)
Программируемый контроллер двигателя постоянного тока Kelly KBL обеспечивает эффективное, плавное и бесшумное управление тележками для гольфа, картингами, электрическими мотоциклами, вилочными погрузчиками, гибридными транспортными средствами, электромобилями, электрическими лодками, а также регулированием скорости или крутящего момента двигателя в промышленности. Контроллер скорости двигателя использует высокомощный полевой МОП-транзистор, ШИМ для достижения эффективности 99% в большинстве случаев. Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. Этот программируемый контроллер бесщеточного двигателя также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
Контроллер скорости двигателя использует высокомощный полевой МОП-транзистор, ШИМ для достижения эффективности 99% в большинстве случаев. Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. Этот программируемый контроллер бесщеточного двигателя также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
KBL-E — универсальный контроллер бесщеточного двигателя с рекуперацией (48–72 В) (400–500 А)
Программируемый контроллер двигателя постоянного тока Kelly KBL обеспечивает эффективное, плавное и бесшумное управление тележками для гольфа, картингами, электрическими мотоциклами, вилочными погрузчиками, гибридными транспортными средствами, электромобилями, электрическими лодками, а также регулированием скорости или крутящего момента двигателя в промышленности. Контроллер скорости двигателя использует высокомощный полевой МОП-транзистор, ШИМ для достижения эффективности 99% в большинстве случаев. Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. Этот программируемый контроллер бесщеточного двигателя также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. Этот программируемый контроллер бесщеточного двигателя также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
KSL — Бессенсорный бесщеточный контроллер двигателя постоянного тока (12–72 В) (100–500 А)
Программируемый бессенсорный контроллер двигателя постоянного тока Kelly KSL обеспечивает эффективное, плавное и бесшумное управление вентиляторами, водяным насосом, кондиционером, компрессором и т. д. Контроллер скорости двигателя использует высокомощный полевой МОП-транзистор и ШИМ для достижения эффективности 99% в большинстве случаев. Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. Этот программируемый контроллер бесщеточного двигателя также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
Контроллеры KSL производятся для бессенсорных двигателей постоянного тока, особенно для вентиляторов, водяных насосов, кондиционеров, компрессоров и т. д.
д.
KBS-X — мини-контроллер бесщеточного двигателя (12–72 В) (25–55 А)
Kelly KBS Программируемый контроллер двигателя постоянного тока BLDC обеспечивает эффективное, плавное и бесшумное управление электрическими мотоциклами, тележками для гольфа, картингами, а также регулирование скорости или крутящего момента промышленных двигателей. Контроллер скорости двигателя использует высокомощный полевой МОП-транзистор с ШИМ для достижения эффективности 99% в большинстве случаев. Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. Этот программируемый контроллер бесщеточного двигателя также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
KBS-E — мини-контроллер бесщеточного двигателя (12–72 В) (80–110 А)
Kelly KBS Программируемый контроллер двигателя BLDC обеспечивает эффективное, плавное и бесшумное управление электрическими мотоциклами, тележками для гольфа, картингами, а также регулированием скорости или крутящего момента промышленных двигателей. Контроллер скорости двигателя использует высокомощный полевой МОП-транзистор, ШИМ для достижения эффективности 99% в большинстве случаев. Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. это 9Программируемый контроллер бесщеточного двигателя 0114 также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
Контроллер скорости двигателя использует высокомощный полевой МОП-транзистор, ШИМ для достижения эффективности 99% в большинстве случаев. Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. это 9Программируемый контроллер бесщеточного двигателя 0114 также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
KEB — Контроллер бесщеточного двигателя E-Bike (24–84 В) (150–450 А)
Kelly KEB48200X программируемый Контроллер бесщеточного двигателя постоянного тока для электровелосипеда обеспечивает эффективное, плавное и бесшумное управление электровелосипедом, электрическим мотоциклом, скутером и т. д. Контроллер бесщеточного электродвигателя для электровелосипеда выдает высокий стартовый ток и строго ограничивает ток аккумулятора . Регулятор скорости двигателя может работать с относительно небольшой батареей, но обеспечивает хорошее ускорение и подъем в гору. Контроллер скорости двигателя BLDC использует высокомощный полевой МОП-транзистор, ШИМ для достижения эффективности 99%. В большинстве случаев мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. Этот программируемый контроллер бесщеточного двигателя также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
Контроллер скорости двигателя BLDC использует высокомощный полевой МОП-транзистор, ШИМ для достижения эффективности 99%. В большинстве случаев мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. Этот программируемый контроллер бесщеточного двигателя также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
KEB-E — Контроллер бесщеточного двигателя E-Bike (72–84 В) (500–550 A)
Kelly KEB48200X программируемый Контроллер бесщеточного двигателя постоянного тока для электровелосипеда обеспечивает эффективное, плавное и бесшумное управление электровелосипедом, электрическим мотоциклом, скутером и т. д. Контроллер бесщеточного электродвигателя для электровелосипеда выдает высокий стартовый ток и строго ограничивает ток аккумулятора . Регулятор скорости двигателя может работать с относительно небольшой батареей, но обеспечивает хорошее ускорение и подъем в гору.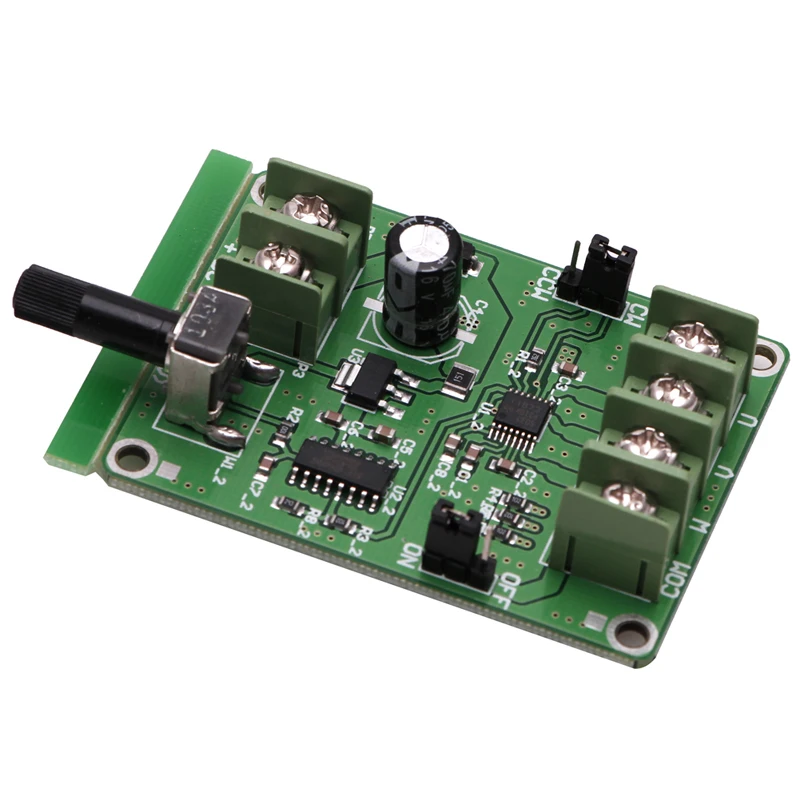 Контроллер скорости двигателя BLDC использует высокомощный полевой МОП-транзистор, ШИМ для достижения эффективности 99%. В большинстве случаев мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. Этот программируемый контроллер бесщеточного двигателя также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
Контроллер скорости двигателя BLDC использует высокомощный полевой МОП-транзистор, ШИМ для достижения эффективности 99%. В большинстве случаев мощный микропроцессор обеспечивает комплексное и точное управление контроллерами двигателей BLDC. Этот программируемый контроллер бесщеточного двигателя также позволяет пользователям быстро и легко задавать параметры, проводить тесты и получать диагностическую информацию.
KVD — Герметичный трапециевидный контроллер бесщеточного двигателя (24–72 В) (140–380 А) — Kelly Controls
Программируемые контроллеры двигателей Kelly KVD
обеспечивают эффективное, плавное и бесшумное управление электрическими мотоциклами, тележками для гольфа и картингами, а также промышленным управлением двигателями. Он использует высокомощные МОП-транзисторы и ШИМ для достижения эффективности до 99% в большинстве случаев. Мощный микропроцессор обеспечивает комплексное и точное управление контроллерами. Он также позволяет пользователям настраивать параметры, проводить тесты и быстро и легко получать диагностическую информацию. Клиенты могут запрограммировать контроллер KVD с помощью программного обеспечения для ПК и приложения для Android. Теперь у клиентов есть еще один вариант программирования контроллера трапециевидной волны. Программное обеспечение APP основано на планшете с ОС Android. Клиенты могут добавить кабель Z-TEK USB-RS232 для программирования контроллера KVD, если они хотят использовать планшет Android.
Клиенты могут запрограммировать контроллер KVD с помощью программного обеспечения для ПК и приложения для Android. Теперь у клиентов есть еще один вариант программирования контроллера трапециевидной волны. Программное обеспечение APP основано на планшете с ОС Android. Клиенты могут добавить кабель Z-TEK USB-RS232 для программирования контроллера KVD, если они хотят использовать планшет Android.
KVD отличается улучшенным корпусом по сравнению с контроллерами KBL с улучшенной гидроизоляцией и защитой от пикового тока.
Рекомендуется для новых клиентов.
99,00 $ – 299,00 $
Описание
| Модель | Напряжение батареи | Максимальное рабочее напряжение | Ток 30 секунд | Непрерывный ток |
|---|---|---|---|---|
| КВД2412Н | 20–24 В | 30 В | 140 А | 60 А |
| КВД2415Н | 20-24В | 30В | 160А | 70А |
| КВД2418Н | 20-24В | 30В | 220А | 80А |
| КВД2430Н | 20-24В | 30В | 270А | 90А |
| КВД2445Н | 20-24В | 30В | 350А | 100А |
| KVD2412NX | 20-24 В | 30 В | 200 А | 75 А |
| KVD6018N | 40-60В | 80В | 220А | 80А |
| KVD6030N | 40-60В | 80В | 270А | 90А |
| КВД7212Н | 40-72В | 86В | 140А | 60А |
| КВД7215Н | 40-72В | 86В | 160А | 70А |
| КВД7218Н | 40-72В | 86В | 220А | 80А |
| KVD7212NX | 40-72В | 86В | 200А | 75А |
| КВД7230Н | 40-72В | 86В | 270А | 90А |
| КВД7245Н | 40-72В | 86В | 350А | 100А |
| КВД7250Н | 40-72В | 86В | 380А | 110А |
| Герметичный трапециевидный бесщеточный контроллер Kelly KVD | ||||
Особенности:
- Интеллектуальные функции с мощным микропроцессором.
- Синхронное выпрямление, сверхмалое падение напряжения, быстрая ШИМ для достижения очень высокой эффективности.
- Электронный реверс.
- Контроль напряжения на 3 фазах двигателя, шине и источнике питания.
- Контроль напряжения на источнике напряжения 12В и 5В.
- Измерение тока на всех 3 фазах двигателя.
- Текущий контур управления.
- Аппаратная защита от перегрузки по току.
- Аппаратная защита от перенапряжения.
- Настраиваемый предел тока двигателя и аккумулятора.
- Низкая ЭМС.
- Защита батареи: уменьшение тока, предупреждение и отключение при настраиваемом высоком и низком напряжении батареи.
- Прочный алюминиевый корпус для максимального отвода тепла и работы в неблагоприятных условиях.
- Прочные сильноточные клеммы и прочные авиационные разъемы для слабых сигналов.
- Тепловая защита: сокращение тока, предупреждение и отключение при высокой температуре.
- Контроллер может выполнять Auto_Identify для датчиков Холла различной степени.
- Настраиваемая защита высокой педали: контроллер не будет работать, если при включении будет обнаружен высокий уровень газа.
- Умножение тока: меньший ток от батареи, больший ток на двигатель.
- Простая установка: работает 3-проводной потенциометр.
- Стандартный ПК/ноутбук для программирования. Для клиентов есть еще один вариант программирования контроллера KVD. Стандартный планшет с ОС Android для программирования. Нужен кабель Z-TEK USB TO RS232 для подключения контроллера к приложению в планшете.
- Предусмотрена пользовательская программа. Легко использовать. Без затрат для клиентов.
- Поддержка двигателей с любым количеством полюсов.
- До 40 000 электрических оборотов в минуту в стандартной комплектации. (Электрические обороты в минуту = механические обороты в минуту * пары полюсов двигателя; пары полюсов двигателя = количество полюсов двигателя/2).
- KVD-N: Защита от пыли и воды в герметичном состоянии, IP66
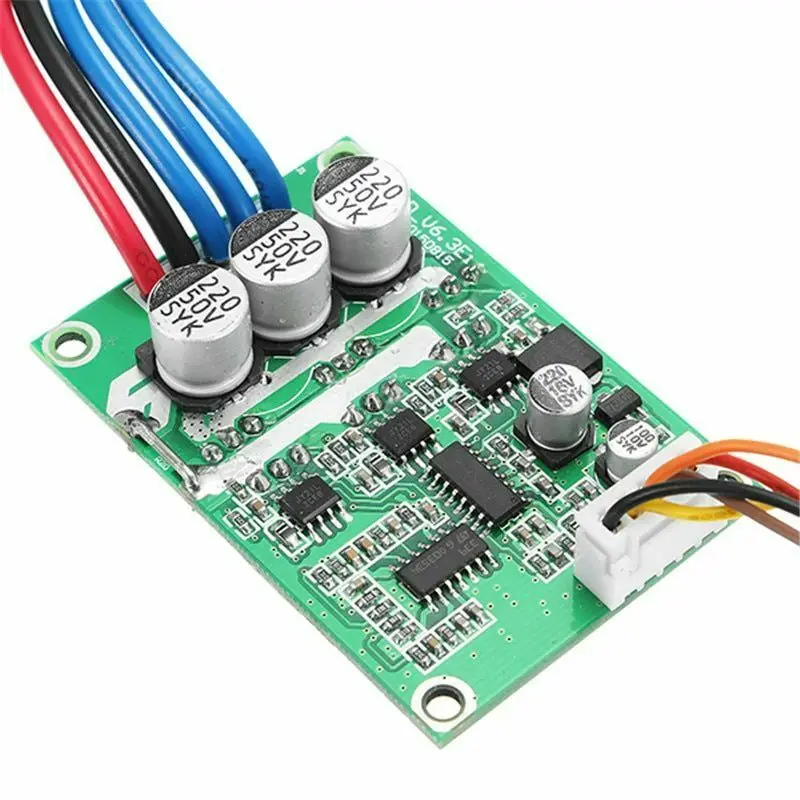
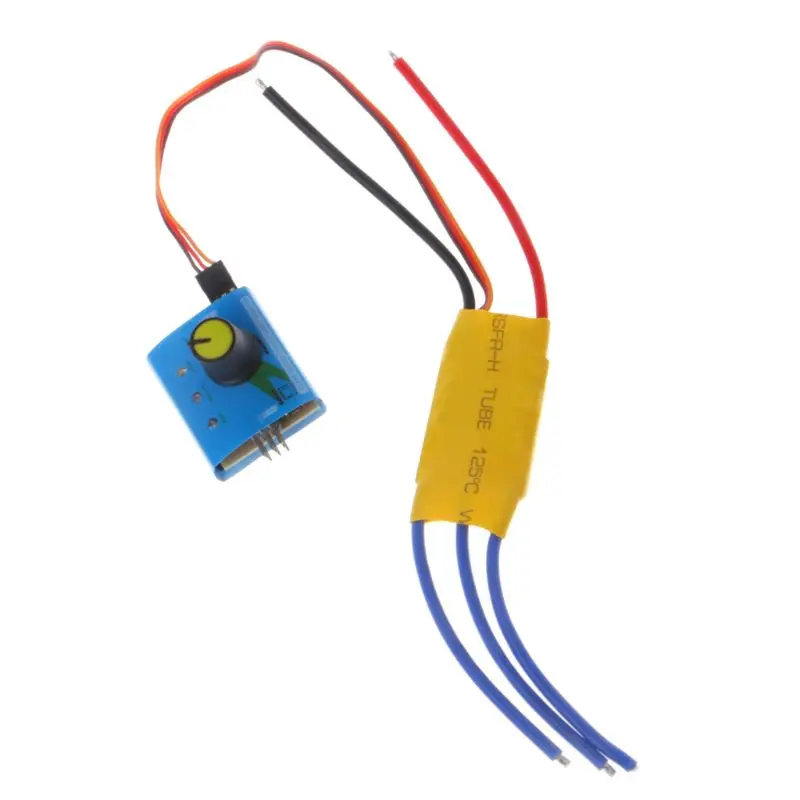
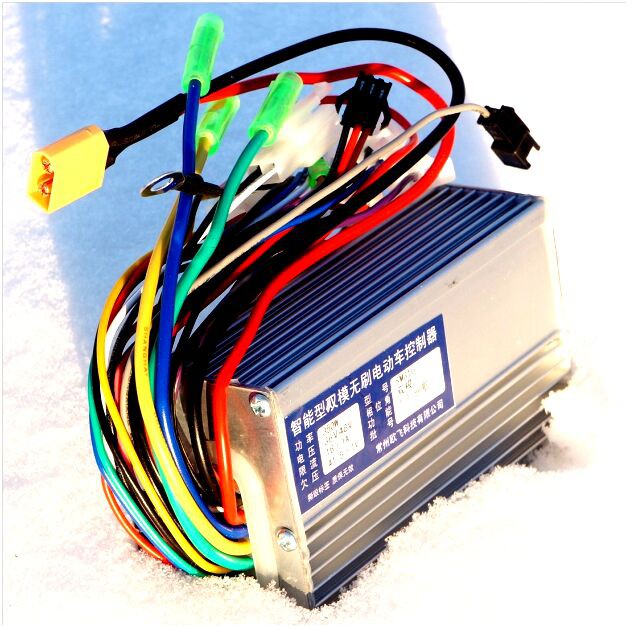
Общие характеристики:
- Рабочая частота: 16,6 кГц.
- Ток батареи в режиме ожидания: < 0,5 мА.
- Ток питания датчика 5 В или 12 В: 40 мА.
- Диапазон напряжения питания контроллера: PWR, от 40 В до 72 В для контроллеров с номинальным напряжением, равным или ниже 72 В. Модель KVD24V: PWR, от 20 до 30 В. Таким образом, все контроллеры КВД-Н относятся к неизолированному типу.
- Ток питания, PWR, 30 мА, тип.
- Настраиваемый диапазон напряжения батареи, B+.
- Стандартный вход дроссельной заслонки: 0–5 В (3-проводной резистивный потенциометр), 1–4 В (активная дроссельная заслонка Холла).
- Вход дроссельной заслонки: 0-5 вольт. Можно использовать 3-проводной потенциометр для получения сигнала 0-5 В.
- Полная мощность Диапазон рабочих температур: от 0 ℃ до 70 ℃ (температура MOSFET).
- Диапазон рабочих температур: от -40 ℃ до 100 ℃ (температура MOSFET).