Содержание
Что такое коллекторная машина | значение термина
Физика — конспекты, новости, репетиторы » Техническая энциклопедия
Опубликовано
коллекторная машина это
электрическая машина (генератор, двигатель), у которой обмотка ротора соединена с коллектором. Коллектор состоит из ряда медных пластин, закреплённых на поверхности короткого цилиндра, насаженного на вал ротора. Пластины электрически изолированы друг от друга и от ротора. К пластинам, расположенным диаметрально относительно оси ротора, присоединены концы одного или нескольких витков обмотки ротора.
Через эти пластины и прилегающие к ним две угольные контактные щётки ток из электрической сети поступает в виток обмотки ротора, приводя его во вращение. При вращении ротора угольные щётки соприкасаются с чередующимися парами пластин коллектора, в результате обеспечивается непрерывная подача тока в обмотки ротора.
Различают коллекторные машины постоянного и переменного тока. Коллекторные машины постоянного тока достаточно широко распространены, но наличие коллектора ограничивает их мощность до нескольких мегаватт и напряжение до 1.5 кВ. Коллекторные машины переменного тока (коллекторные асинхронные двигатели) применяются значительно реже бесколлекторных, гл. обр. в электроприводе с возможностью регулировать частоту вращения ротора в широких пределах и в тех случаях, когда требуется получение больших угловых скоростей при питании током промышленной частоты 50 Гц (напр., однофазные двигатели малой мощности в бытовых электроприборах, электроинструменте). Коллекторный генератор переменного тока позволяет регулировать частоту тока независимо от частоты вращения ротора генератора. В этом качестве коллекторный генератор используется как преобразователь частоты. Коллекторные преобразователи частоты входят в состав двух или более электрических машин, связанных между собой механически и(или) электрически, с целью плавного и экономичного регулирования частоты вращения электродвигателя (обычно асинхронного) в нереверсивных электроприводах средней и большой мощности. К нач. 21 в. коллекторные преобразователи практически вытеснены полупроводниковыми преобразователями частоты.
К нач. 21 в. коллекторные преобразователи практически вытеснены полупроводниковыми преобразователями частоты.
Источник: Энциклопедия «Техника». — М.: Росмэн. 2006.
Универсальные электродвигатели. Как они работают?
Чем отличается коллекторный и бесколлекторный мотор
Электродвигатель постоянного тока. Принцип работы.
Коллекторные двигатели.
Принцип работы бесщеточного двигателя постоянного тока
Чем отличаются коллекторный и бесколлекторный мотор?
Принцип работы синхронного электродвигателя
Универсальный электродвигатель
Таходатчик для любого коллекторного мотора.
Электроника, часть 6. Коллекторные и бесколлекторные двигатели.
MMAX Rh2031 против Rh2035. Тест драйв коллекторной и бесколлекторной модели от Remo Hobby
КИА Моторс смотри / Твои дилеры конченые кидалы
Как обкатать коллекторный двигатель радиоуправляемой модели машины
Какой мотор лучше, или какая разница в моторах стиральных машин
Автохлам из Ростова-на-Дону. Как нас обманывают дилеры
Как нас обманывают дилеры
Простая Проверка якоря коллекторного двигателя Омметром
✔ Коллекторные VS Бесколлекторные моторы для новичков:от А до Я. Как выбрать то, что нужно?[Подкаст]
❕❕❕ Коллекторный мотор без магнитов, вечный двигатель?
Инверторный двигатель | Принцип работы | Плюсы и минусы
Устройство коллекторного двигателя постоянного тока.
Поделиться или сохранить к себе:
принцип действия и устройство, регуляторы оборотов, контроллер управления на ШИМ tda1085 • Мир электрики
Содержание
- Коллекторные электродвигатели
- Регуляторы оборотов для КД
- Особенности бесколлекторного двигателя
В настоящее время коллекторные двигатели получили широкое применение в быту и на производстве. Такие электромеханические устройства могут быть как постоянного, так и переменного тока. В зависимости от их предназначения возникает необходимость в изменении скорости вращения оборотов электродвигателя. С такой задачей может справиться тиристорный регулятор напряжения или симисторный регулятор мощности для электродвигателя.
Коллекторный двигатель (КД) представляет собой электрическую машину, которая преобразовывает электрическую энергию в механическую и обратно. Классифицируются КД по роду питающего тока, их разделяют на следующие группы:
- Питание постоянным током. Имеют простую конструкцию, высокий пусковой момент и управляются плавной регулировкой частоты вращения.
- Универсальные КД можно питать от постоянного и переменного напряжения. Основные достоинства: простота управления, недорогая стоимость и компактность.
КД постоянного тока в зависимости от типа индуктора могут быть на постоянных магнитах или дополнительных катушках возбуждения. Постоянные магниты создают необходимый магнитный поток, способствующий образованию вращающего момента. Двигатели, где применяются катушки возбуждения, различаются по типу обмоток.
Двигатели универсальные состоят из следующих элементов:
- Коллектора.

- Щеткодержателей для фиксации щёток.
- Щёток (графитовых или медно-графитовых), служащих для электрического контакта между статорными обмотками и обмотками якоря.
- Статорного сердечника, как правило, состоящего из электротехнической стали.
- Обмотки статора.
- Вала якоря.
Такого типа КД могут быть с параллельным и последовательным возбуждением.
Универсальные двигатели могут работать также и от переменного напряжения, когда при смене полярности в обмотках возбуждения возникает наводящий ток необходимого направления для реверсирования вращения якоря (аверс/реверс). Для регулировки скорости вращения вала электродвигателя, используются различные электрические схемы регуляторов оборотов коллекторных двигателей.
Регуляторы оборотов для КД
Существует несколько типов управляющих схем для регулировки оборотов коллекторных двигателей. Для маломощных устройств с напряжением питания 12 В (вольт) можно использовать реостат или простейшую схему, собранную на транзисторе, за основу которой можно взять любой компенсационный стабилизатор постоянного тока с регулировкой напряжения.
Для плавной регулировки оборотов якоря более мощного КД необходим тиристорный регулятор напряжения постоянного тока. Для протекания тока через тиристор необходимо на его управляющий электрод подать кратковременный импульс. В зависимости от частоты поданных импульсов создаётся порог открывания тиристора, что изменяет величину напряжения на выходе регулятора оборотов. Частоту импульсов можно изменять, включив в схему регулятора генераторный транзистор, например, КТ117, или собрать схему управления на таймере 555 (КР1006ВИ1 отечественного производства).
Такой регулятор постоянного тока можно использовать только с КД постоянного напряжения. Используя тиристоры в высокоиндуктивной нагрузке, так как они могут не до конца закрыться, чревато для выхода из строя регулятора.
Регулировку рекомендуется производить с помощью регулятора оборотов коллекторного двигателя с обратной связью, который задаёт скорость вращения с помощью формирователя опорного напряжения в схеме. В момент нагрузки скорость вращения снижается, а вместе с ней вращающий момент.
В момент нагрузки скорость вращения снижается, а вместе с ней вращающий момент.
За счёт уменьшения противо-ЭДС между управляющим электродом и катодом тиристора возникшей в двигателе пропорционально увеличится напряжение управления на тиристоре. Увеличение величины напряжения, с малым фазовым углом, открывается тиристор и подаёт на двигатель максимальный ток.
Тиристор подбирается таким образом, чтобы пусковой ток КД не превышал его максимально допустимые параметры. Регулировку можно производить только на КД состоящих из щёточного узла.
Тиристорный регулятор по схематическим соображениям не может регулировать обороты асинхронных электродвигателей.
Особенности бесколлекторного двигателя
С виду бесколлекторный двигатель схож с КД, но по конструктивным особенностям имеется различие из-за отсутствия коллектора и щёток.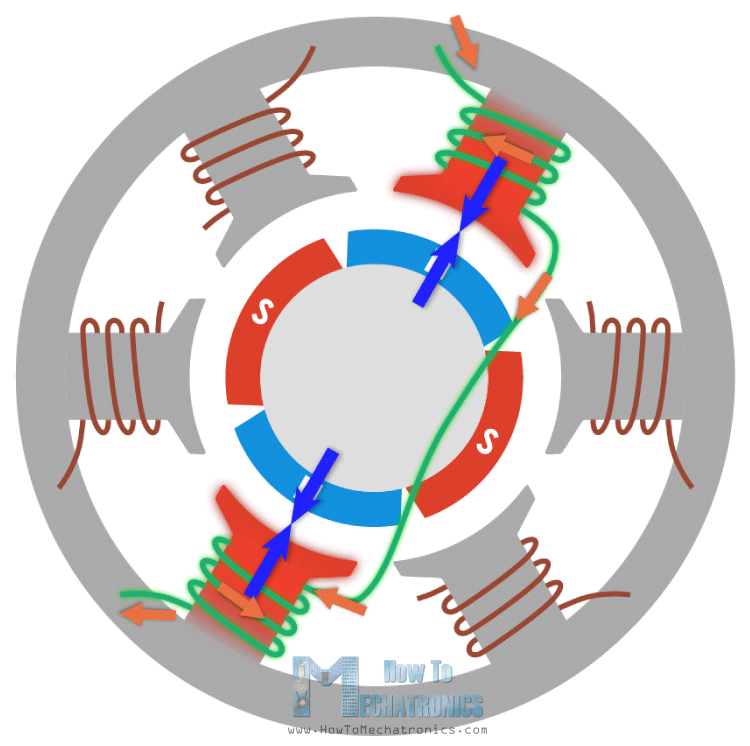 В бесколлекторном двигателе постоянные магниты расположены вокруг вала, так называемого ротора, а обмотки находятся непосредственно на статоре вокруг ротора и имеют определённое количество пар полюсов, от которых зависит скорость мотора. Некоторые бесколлекторные моторы оснащаются сенсорными датчиками, предназначенными для слежения за положением ротора, и управляются электронными регуляторами скорости, собранными на контроллере.
В бесколлекторном двигателе постоянные магниты расположены вокруг вала, так называемого ротора, а обмотки находятся непосредственно на статоре вокруг ротора и имеют определённое количество пар полюсов, от которых зависит скорость мотора. Некоторые бесколлекторные моторы оснащаются сенсорными датчиками, предназначенными для слежения за положением ротора, и управляются электронными регуляторами скорости, собранными на контроллере.
Основными достоинствами бесколлекторных моторов являются отсутствие искрения щёток, создающих помехи, и отсутствие постоянного трения, повышающего температуру внутри двигателя. Отсутствие изнашивающихся частей — коллектора и щёток — увеличивает срок эксплуатации таких моторов, не считая замены подшипников. К недостаткам можно отнести лишь высокую стоимость изделия.
Особой популярностью пользуются однофазные асинхронные двигатели переменного тока, которые используют в различных станках на производстве, а также в бытовых электроприборах, где необходимо использовать разные скорости вращения. Для этих целей используется симисторный регулятор мощности для электродвигателя.
Для этих целей используется симисторный регулятор мощности для электродвигателя.
Регулятор оборотов асинхронного двигателя своими руками можно сделать на ШИМ-контроллере tda1085, который управляет симистором. Контроллер можно использовать для управления стиральной машиной совместно с таходатчиком, который считывает импульсы от тахогенератора. Регулирование оборотов осуществляется без потери мощности и независимо от нагрузки.
Разница между коллекторным и бесщеточным двигателем
Хотя наличие щеток является основным фактором, отличающим коллекторные и бесщеточные двигатели постоянного тока, это не единственная разница. На этой странице объясняются различия в том, как работают два типа двигателей и как они управляются.
Различные детали, используемые в щеточных и бесщеточных двигателях постоянного тока
Двигатели состоят из статора и ротора. Магнитная сила, возникающая при протекании тока через катушку, заставляет ротор вращаться. Так работают все электродвигатели, независимо от того, щеточные они или бесщеточные.
Магнитная сила, возникающая при протекании тока через катушку, заставляет ротор вращаться. Так работают все электродвигатели, независимо от того, щеточные они или бесщеточные.
Однако существует разница между щеточными и бесщеточными двигателями в конструкции статора и ротора. Более того, в то время как наличие щеток и коллектора необходимо, учитывая, как щеточный двигатель постоянного тока достигает вращения, для бесщеточного двигателя постоянного тока вместо этого требуется схема привода.
| Коллекторный двигатель постоянного тока | Бесщеточный двигатель постоянного тока | |
|---|---|---|
| Ротор | Намотанный многослойный сердечник | Постоянный магнит |
| Статор | Постоянный магнит | Намотанный многослойный сердечник |
| Управление | Щетки и коллектор | Магнитный датчик и схема привода |
Ротор щеточного электродвигателя постоянного тока имеет конструкцию, состоящую из намотанной катушки на многослойный сердечник и вал.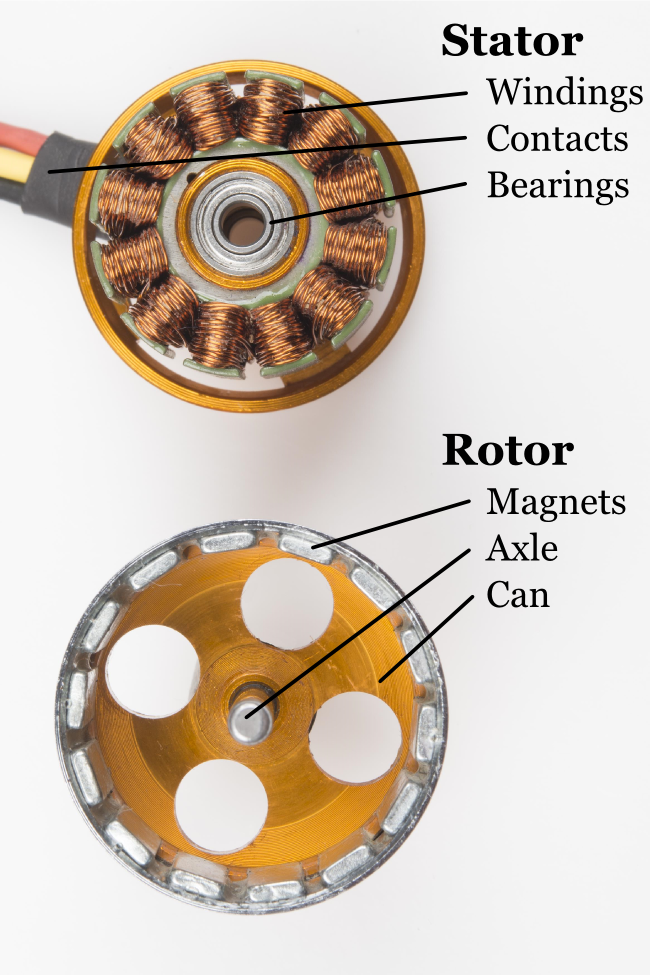 При вращении ротора в магнитном поле вместе с ним вращается и коллектор, при этом поочередно контактируя с каждой из щеток. Каждый раз, когда коммутатор поворачивается от одной щетки к другой, он меняет направление тока в катушке, тем самым поддерживая циклическое движение ротора и приводя в действие двигатель. Управление скоростью и крутящим моментом коллекторного двигателя постоянного тока осуществляется путем изменения напряжения и тока.
При вращении ротора в магнитном поле вместе с ним вращается и коллектор, при этом поочередно контактируя с каждой из щеток. Каждый раз, когда коммутатор поворачивается от одной щетки к другой, он меняет направление тока в катушке, тем самым поддерживая циклическое движение ротора и приводя в действие двигатель. Управление скоростью и крутящим моментом коллекторного двигателя постоянного тока осуществляется путем изменения напряжения и тока.
В бесщеточном двигателе постоянного тока, напротив, постоянный магнит является частью узла ротора. Более того, в то время как щетки и коллектор в коллекторном двигателе постоянного тока находятся в физическом контакте, в бесщеточном двигателе постоянного тока такого контакта нет. Вместо этого ток, протекающий через катушку, изменяется в соответствии с ориентацией магнитных полюсов ротора, которая определяется датчиком.
Различная основная конструкция щеточных и бесщеточных двигателей постоянного тока
В этом разделе содержится более подробная информация об этих различиях в управлении двумя типами двигателей.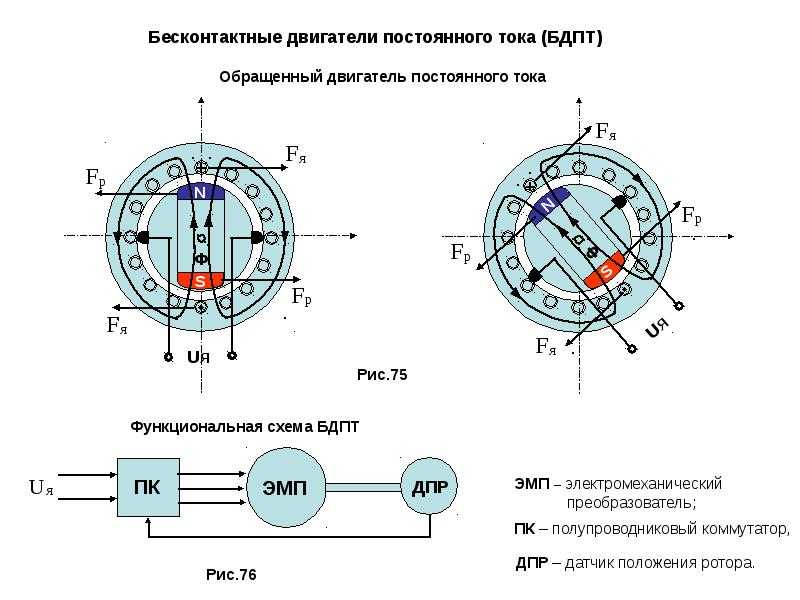
Управление коллекторными двигателями постоянного тока
Вращением коллекторных двигателей постоянного тока управляют щетки и коллектор. Статор содержит магнит возбуждения, и электрический ток протекает через катушку в роторе. То есть электрический контакт между щетками и коммутатором позволяет току течь от щетки к коммутатору, а затем к катушке. Этот ток в катушке создает магнитную силу (с направлением, определяемым правилом левой руки Флеминга), и это заставляет ротор вращаться. Однако направление магнитной силы смещается к центру, когда вращение приближается к 90°, и это приведет к остановке вращения.
Чтобы избежать этого, ток отключается незадолго до того, как ротор достигает положения 90°. Ротор продолжает вращаться по инерции после 90°, пока ток снова не начнет течь, на этот раз в противоположном направлении. Это обратное направление тока перемещает ротор из положения 90° в противоположное положение 270°, где направление потока снова меняется на противоположное. Другими словами, вращение ротора вызывает изменение направления тока через катушку каждые 180°, что, в свою очередь, поддерживает вращение.
Другими словами, вращение ротора вызывает изменение направления тока через катушку каждые 180°, что, в свою очередь, поддерживает вращение.
Управление крутящим моментом и скоростью двигателя осуществляется путем изменения тока в катушке без изменения геометрии катушки, количества витков или плотности потока магнита возбуждения. Чем выше ток, тем больше крутящий момент и тем быстрее вращается двигатель.
Управление бесщеточными двигателями постоянного тока
Управление работает по-другому в бесщеточных двигателях постоянного тока, так как обмотка сердечника находится в статоре, конфигурация, противоположная щеточным двигателям постоянного тока.
Например, трехфазный бесщеточный двигатель постоянного тока с внешним ротором состоит из трех катушек статора, соединенных с шестью переключателями. Магнитная полярность (N или S) катушек определяется включением или выключением этих переключателей, и это делается таким образом, что ротор вращается. То есть поток тока регулируется так, чтобы чередовать магнитные полярности статора таким образом, чтобы магнитные силы притяжения и отталкивания заставляли ротор вращаться с высокой скоростью.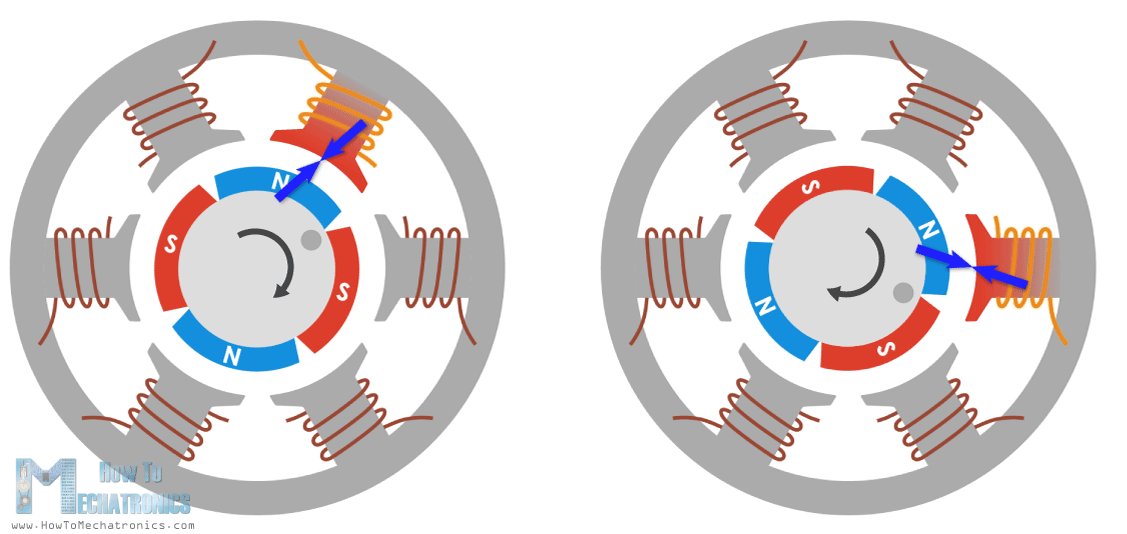
Элементы, составляющие схему управления бесщеточным двигателем постоянного тока, могут включать в себя датчик магнитной полярности для определения скорости двигателя, схему для сравнения фактической скорости двигателя с эталонной скоростью, схему для расчета требуемого напряжения привода и цепь привода, которая обеспечивает это напряжение.
Коллекторный двигатель постоянного тока (слева) и бесщеточный двигатель постоянного тока (внутренний ротор BLDC: справа)r
Различные риски, связанные с долговечностью и шумом
Физический контакт между щетками и коллектором в щеточном двигателе постоянного тока означает, что эти детали изнашиваются по мере использования. Кроме того, связанные с этим риски электрических помех, искрения и акустического шума делают этот контакт проблематичным на высоких скоростях. В то время как коллекторные двигатели постоянного тока хороши для поддержания низких первоначальных затрат, необходимость технического обслуживания, такого как регулярный осмотр или замена деталей, может увеличить их долгосрочные затраты.
Между тем, отсутствие щеток означает, что бесщеточные двигатели постоянного тока не подвержены износу этих деталей или электрическому шуму, вызванному контактом щеток. Они просты в управлении по сравнению с щеточными двигателями постоянного тока, поскольку они могут использовать технологию, называемую синусоидальным приводом, для обеспечения бесшумной работы с низким уровнем вибрации и электрического шума. Вот почему бесщеточные двигатели постоянного тока, как правило, выбирают для приложений, требующих двигателей с длительным сроком службы и высокой эффективностью.
Отличается необходимостью датчика положения ротора
Поскольку они полагаются на свою способность изменять направление тока, коллекторные двигатели постоянного тока не должны определять положение ротора.
Бесщеточные двигатели постоянного тока, с другой стороны, нуждаются в этой возможности, потому что они управляются на основе магнитной полярности ротора, когда он вращается в разных положениях. Определение положения ротора также помогает поддерживать стабильный контроль скорости и крутящего момента.
Определение положения ротора также помогает поддерживать стабильный контроль скорости и крутящего момента.
Сводка
В то время как щеточные двигатели постоянного тока имеют щетки и коммутатор, для бесщеточных двигателей постоянного тока требуется схема управления. Два типа двигателей также имеют противоположную конфигурацию в зависимости от того, расположены ли намотанные многослойные сердечники и постоянные магниты в статоре или в роторе. Эти различные различия следует учитывать при выборе наилучшего двигателя для каждого применения.
Решение проблем с бесщеточными двигателями постоянного тока
ASPINA поставляет не только автономные бесщеточные двигатели постоянного тока, но и системные продукты, включающие системы привода и управления, а также механические конструкции. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым в различных отраслях промышленности, областях применения и потребительских продуктах, а также для ваших конкретных производственных схем.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних стадиях разработки.
Вы боретесь со следующими проблемами?
- Выбор двигателя
- У вас еще нет подробных спецификаций или проектных чертежей, но нужен совет по двигателям?
- У вас нет штатного специалиста по двигателям, и вы не можете определить, какой тип двигателя лучше всего подойдет для вашего нового продукта?
- Разработка двигателей и связанных с ними компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и заказать приводные системы и разработку двигателей?
- Хотите сэкономить время и силы на перепроектирование существующих механических компонентов при замене двигателя?
- Уникальное требование
- Вам нужен нестандартный двигатель для вашего продукта, но ваш обычный поставщик отказался?
- Не можете найти двигатель, обеспечивающий требуемый контроль, и почти теряете надежду?
Ищете ответы на эти вопросы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Свяжитесь с нами
Ссылки на глоссарий и страницы часто задаваемых вопросов Матовые двигатели | Прямые выпуски новостей KDE
Неудивительно, что самая большая разница между щеточными и бесщеточными двигателями заключается в щетках. Но что это на самом деле означает?
Принцип внутренней работы щеточных и бесщеточных двигателей во многом одинаков. Когда обмотки двигателя находятся под напряжением, создается временное магнитное поле, отталкивающее или притягивающее постоянные магниты. Эта магнитная сила преобразуется во вращение вала, позволяя двигателю совершать работу. Когда вал вращается, электрический ток направляется к различным наборам обмоток, поддерживая электродвижущее отталкивание или притяжение, заставляя ротор постоянно вращаться.
История щеточных и бесщеточных двигателей
Коллекторные двигатели постоянного тока используются с 1856 года и до сих пор часто используются в электрических силовых установках, кранах, бумагоделательных машинах и сталепрокатных заводах. Однако, поскольку их щетки изнашиваются и требуют частой замены, бесщеточные двигатели постоянного тока с электронными регуляторами скорости вытесняют щеточные двигатели во многих областях применения. Износ щеток стал существенным недостатком из-за интенсивных требований к применению и сильного шума электрического разряда (также известного как электростатический разряд, особенно в аэрокосмических приложениях), и родился новый двигатель.
Однако, поскольку их щетки изнашиваются и требуют частой замены, бесщеточные двигатели постоянного тока с электронными регуляторами скорости вытесняют щеточные двигатели во многих областях применения. Износ щеток стал существенным недостатком из-за интенсивных требований к применению и сильного шума электрического разряда (также известного как электростатический разряд, особенно в аэрокосмических приложениях), и родился новый двигатель.
Бесколлекторные двигатели значительно новее и изобретены во время появления инноваций в электронике. Достижения в области твердотельных технологий в начале 1960-х годов привели к изобретению в 1962 году первого бесщеточного двигателя постоянного тока (BLDC), который Т.Г. Уилсон и П.Х. Трики назвал «машиной постоянного тока с твердотельной коммутацией». Ключевым элементом бесщеточного двигателя является то, что он не требует физического коммутатора, что делает его наиболее популярным выбором для компьютерных дисководов, робототехники и самолетов.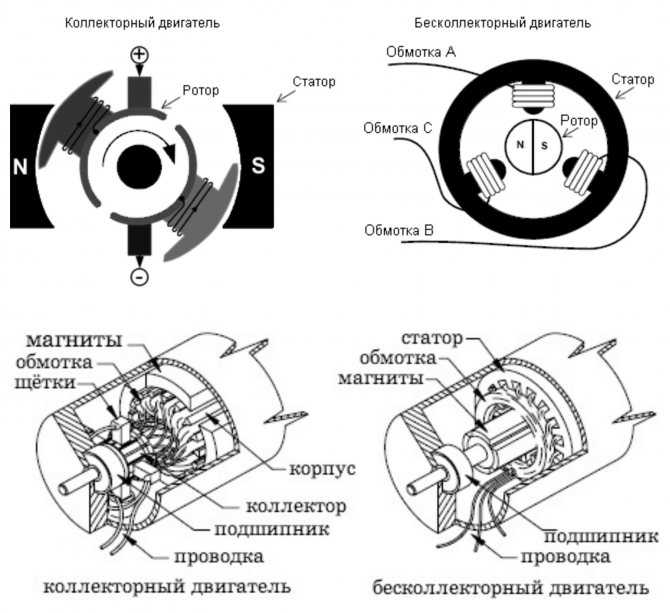
Преимущества бесщеточного двигателя
Поскольку бесщеточные двигатели постоянного тока не имеют изнашиваемых щеток, они представляют собой огромный технологический скачок. Бесщеточные двигатели имеют значительно более высокую эффективность и производительность, а также меньшую подверженность механическому износу, чем их щеточные аналоги.
Бесщеточные двигатели имеют ряд других преимуществ, в том числе:
- Более высокое отношение крутящего момента к весу
- Увеличенный крутящий момент на ватт входной мощности (повышенная эффективность)
- Повышенная надежность и снижение требований к техническому обслуживанию
- Снижение рабочего и механического шума
- Увеличенный срок службы (отсутствие эрозии щеток и коллектора)
- Устранение ионизирующих искр от коллектора (ESD)
- Почти полное устранение электромагнитных помех (EMI)
Современные бесщеточные двигатели
Несмотря на их надежность, первоначальным недостатком ранних бесщеточных двигателей было то, что они не могли генерировать большую мощность. Когда лучшие материалы для постоянных магнитов стали доступны в 19 в.В 80-х годах они позволили бесщеточным двигателям генерировать столько же (или больше) мощности, как и предыдущие щеточные двигатели на рынке. В конце 80-х годов Роберт Э. Лордо построил первый крупный бесщеточный двигатель постоянного тока, мощность которого в десять (10) раз превышала мощность предыдущих бесщеточных двигателей.
Когда лучшие материалы для постоянных магнитов стали доступны в 19 в.В 80-х годах они позволили бесщеточным двигателям генерировать столько же (или больше) мощности, как и предыдущие щеточные двигатели на рынке. В конце 80-х годов Роберт Э. Лордо построил первый крупный бесщеточный двигатель постоянного тока, мощность которого в десять (10) раз превышала мощность предыдущих бесщеточных двигателей.
Современные бесщеточные двигатели устраняют многие недостатки щеточных двигателей, сочетая более высокую выходную мощность, меньшие размеры и вес, лучшее рассеивание тепла и эффективность, более широкий диапазон рабочих скоростей и очень низкий уровень электрических шумов. Бесщеточные двигатели не имеют электрических контактов, рассчитанных на износ, что обеспечивает наибольшее преимущество в надежности и сокращении интервалов технического обслуживания для коммерческого и промышленного применения.
Бесщеточные двигатели KDE Direct
Бесщеточные двигатели KDE Direct, разработанные и спроектированные в США, обеспечивают лучшую в своем классе мощность, производительность и эффективность.