Содержание
Как осуществляется регулировка оборотов коллекторного двигателя без потери мощности
Содержание
- 1 Общие параметры
- 2 Регуляторы стандартные
- 2.1 Схема симисторная
- 2.2 Реостатная схема
- 2.3 Интегральная
- 3 Самостоятельное создание регулятора
- 3.1 Способ 2
- 4 Частотная регулировка
- 5 Изменение числа полюсов
- 6 Проведение регулирование в моторах АС
- 6.1 При помощи напряжения
- 6.2 Определение сопротивления
- 6.3 Применение двойного питания
- 7 Вывод
При эксплуатации коллекторных электродвигателей нередко возникает необходимость в регулировании оборотов устройства. Важно при этом не снизить общие показатели мотора, чтобы работа не пошла насмарку. Рассмотрим же детально особенности самостоятельного регулирования.
Регулятор по схеме
Силовые агрегаты данного типа активно используются в бытовой электрической технике, инструментах: стиральных машинах, болгарках, пылесосах, дрелях, квадрокоптерах и др. это обусловливается высокой результативностью приборов, которые демонстрируют большое число оборотов и высоким крутящим моментом (также и пусковым). Данных технических характеристик с лихвой хватает на обеспечения работы техники и инструментов на требуемом уровне.
это обусловливается высокой результативностью приборов, которые демонстрируют большое число оборотов и высоким крутящим моментом (также и пусковым). Данных технических характеристик с лихвой хватает на обеспечения работы техники и инструментов на требуемом уровне.
Сами моторы работают от сетей как постоянного, так и переменного токов, от обычных бытовых сетей. Чтобы осуществить управление скоростями оборотов ротора такого двигателя, необходимо использовать специальные регуляторы. При этом потери в мощностях будут минимальными.
Общие параметры
Принцип работы и общая конструкция таких силовых агрегатов известны большинству, ведь при создании или модернизации конструкции не обойтись без познаний в данной категории. Состоит мотор из таких ключевых элементов:
- ротора;
- статора;
- коммутационного узла щеточно-коллекторного типа.
При подаче питания на ротор и статор, на каждом из них образовываются магнитные поля, которые взаимодействуют между собой.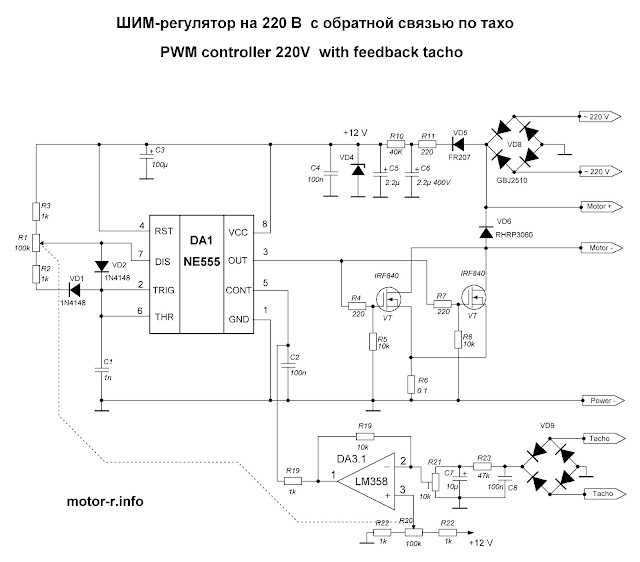 Это в свою очередь вызывает вращения у ротора.
Это в свою очередь вызывает вращения у ротора.
Подача питания на этот компонент осуществляется с применением графитовых щеток, которые плотно прилегают к ламелям коллектора. Чтобы изменить направленность оборотов ротора, нужно поменять положение фаз напряжения на одном из двух элементов: статоре или роторе.
Обмотки этих приспособлений могут получать питание от источников, или подключаться друг к другу параллельно. Именно на основе этой особенности силовые агрегаты классифицируются на параллельные и последовательные. От этого зависит способ возбуждения медных обмоток.
Если говорить про коллекторные моторы последовательного типа, то именно они чаще всего применяются в бытовых электрических приборах. Это обусловливается тем, что именно такое возбуждение дает возможность получать самый устойчивый к перегрузкам мотор.
Регуляторы стандартные
Что касается данных компонентов, то они реализуются множеством способов. Первая и самая простая схема – тиристорная. Такая технология применяется в бытовых приборах: стиральных машинах, дрелях, шуруповертах, пылесосах, и др. С легкостью подключаются к сетям переменного тока, в том числе и бытового назначения.
Такая технология применяется в бытовых приборах: стиральных машинах, дрелях, шуруповертах, пылесосах, и др. С легкостью подключаются к сетям переменного тока, в том числе и бытового назначения.
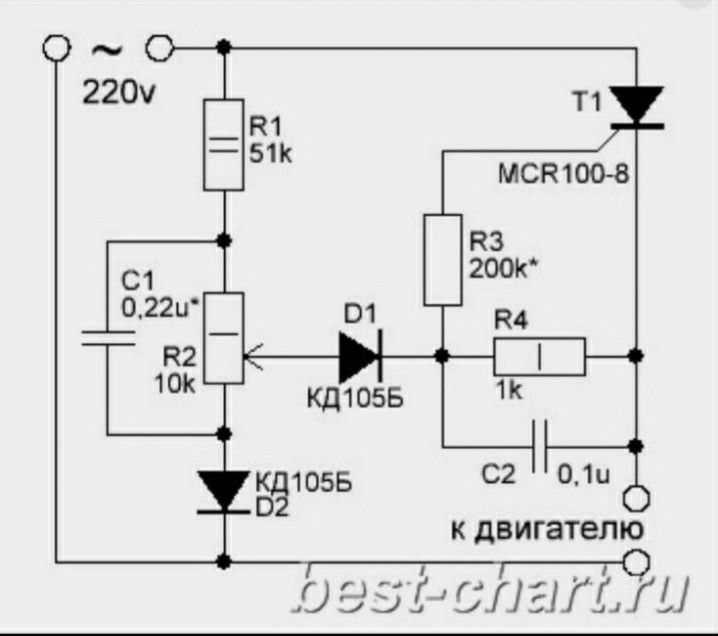
Стандартная схема
Работа этой схемы довольно простая: на всех участках сетевых токов, конденсатор получает ток при помощи резистора. Зарядка осуществляется до уровня открытия динистора, который подключен к регулирующим электродам сисмстора. После этого последний открывается и через него проходит ток к нагрузкам КД.
Схема дает возможность продуктивно регулировать время подзарядки конденсатора в управленческой цепи, а также определяя среднюю мощность напряжения, подаваемую на мотор.
Давайте упорядочим все шаги работы данной схемы. Вот они:
- подача тока к конденсатору от источника питания на 220 вольт;
- напряжение для пробоя динистора подается также, но уже через резистор переменного типа;
- непосредственно пробой;
- открытие симистора.
 Компонент работает непосредственно с показателями нагрузки;
Компонент работает непосредственно с показателями нагрузки; - чем выше напряжение – тем чаще симистор открывается.
 Компонент работает непосредственно с показателями нагрузки;
Компонент работает непосредственно с показателями нагрузки;
Данная технология обеспечивает простое, но в то же время эффективное регулирование интенсивности оборотов. Но, в то же время применение стандартной схемы не обеспечивает обратной связи, что также стоит учитывать при ее реализации. Исходя из этого, нужно также знать, что при изменении показателей нагрузки, параллельно будут нуждаться в настройке обороты мотора.
Схема симисторная
Этот механизм имеет много общих параметров с диммером, применяемом для регулирования уровня яркости ламп накалывания. Обратная связь также отсутствует. Реализовать реверс по току моно, но с применением вспомогательной электроники. Это делается для того, чтобы беспрепятственно удерживать мощность на заданных показателях, не допуская перегревов и перегрузок.
 youtube.com/embed/f-W7Zur0AC0?feature=oembed&wmode=opaque» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
youtube.com/embed/f-W7Zur0AC0?feature=oembed&wmode=opaque» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
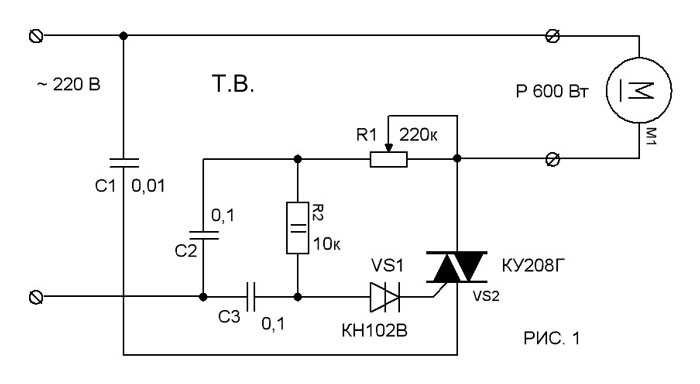
Реостатная схема
Относится к модифицированным схемам, но, несмотря на это, ее реализация также отличается простотой. С помощью получается стабилизировать обороты, а также рассеивать огромное количество вырабатываемого тепла. Регулировка осуществляется с помощью радиатора, который нужно заранее заготовить. Надо обеспечить и эффективный отвод тепла, что приводит к потерям энергии и, как следствие – коэффициента полезного действия. Для того чтобы предотвратить эти недостатки, рекомендуют применять активное охлаждение на постоянной основе.
Реостатная схема пример
Полученный регулятор ограничитель отличается своей эффективностью, при реализации смены числа оборотов двигателя. Также достичь производительности помогут силовые транзисторы, «отбирающие» определенную долю напряжения.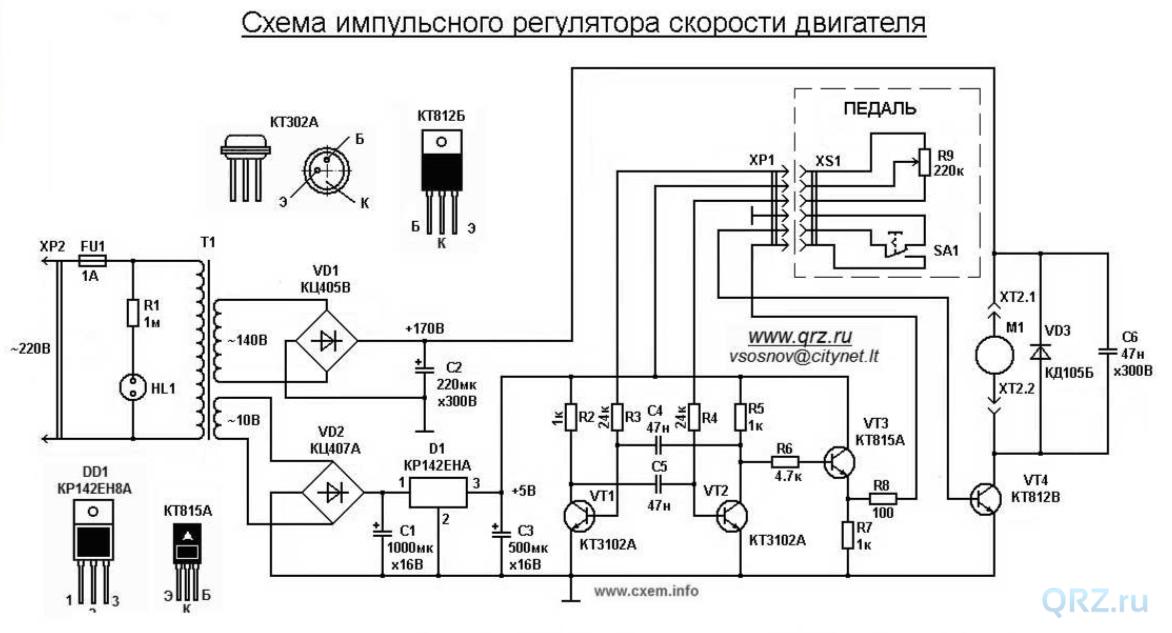 Это обусловливается тем, что количество тока из сети 220В доходит до мотора в меньшем объеме, благодаря этому, силовой агрегат не сталкивается с большими нагрузками.
Это обусловливается тем, что количество тока из сети 220В доходит до мотора в меньшем объеме, благодаря этому, силовой агрегат не сталкивается с большими нагрузками.
Интегральная
Стабилизация также относится к модифицированным схемам. Здесь в основе процесса регулирования лежит таймер интегрального действия. Его основная задача – контролировать уровни нагрузки на электродвигатель. Здесь также находят свое применение транзисторы. Особенность обусловливается микроконтроллером, входящим в состав системы, при этом, обладающим высокими параметрами выходного напряжения.
В ситуациях, когда имеет место нагрузка в 0,1 ампер, все токи поступают напрямую на плату, обходя транзисторы. Чтобы обеспечить эффективную работу регулятора, необходимо, чтобы на затворе было напряжение 12в. Следовательно, для слаженной работы, электрическая цепь и уровень напряжения в источнике питания должны соответствовать этому диапазону. Ресурс регулятора позволяет устанавливать компонент в мощных модификациях, для точного и быстрого регулирования их работы.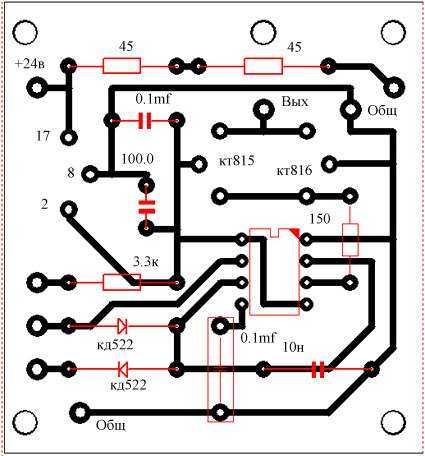
Интегральная схема
Самостоятельное создание регулятора
Заводские регуляторы представлены в широком ассортименте, как в интернете, так и обыкновенных магазинах. Но, если у вас нет желания приобретать готовый компонент и вы хотите собрать его самостоятельно – это реально осуществить. Чтобы задача была успешной – необходимо следовать алгоритму конструкции и иметь в наличии все необходимые компоненты.
Нам понадобятся:
- проводки;
- готовая схема;
- конденсаторные схемы;
- тиристор;
- резистор;
- паяльник.
Ориентируясь на схему компоновки, мощностной и оборотный регулятор будет отвечать за контроль первого полупериода. Самодельный стабилизатор имеет такой алгоритм работы (пример нашей модели):
- прибор, подключенный к стандартной сети питания на 220в, принимает ток на конденсатор;
- компонент сразу же срабатывает, после получения заряда;
- передача нагрузки к резисторам и нижним кабелям;
- соединение положительного конденсаторного контакта к тиристорному электроду;
- подача одного заряда напряжения на достаточном уровне;
- открытие второго полупроводника;
- конденсатор подает на тиристор нагрузку, он в свою очередь пропускает ее через себя;
- конденсатор разряжается;
- повторение полупериода;
Если мощность двигателя постоянного или переменного тока большая – регулятор обеспечивает экономную работу устройства.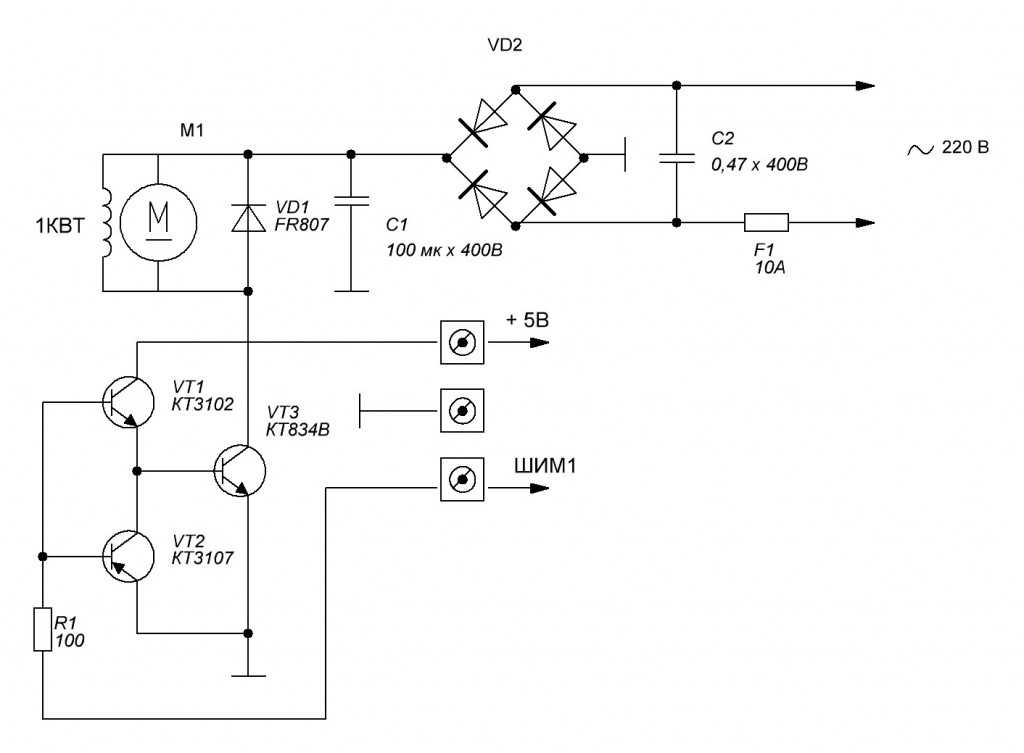 Для использования приспособления в своих бытовых, мощности и ресурса хватает. Но, когда нужно осуществлять регулирование оборотов без потери мощности и более крупных и производительных агрегатов, тогда стоит обратить внимание все же на заводские модификации. Несмотря на то, что такой вариант получится дороже, он обеспечит 100%-ю работоспособность и надежность.
Для использования приспособления в своих бытовых, мощности и ресурса хватает. Но, когда нужно осуществлять регулирование оборотов без потери мощности и более крупных и производительных агрегатов, тогда стоит обратить внимание все же на заводские модификации. Несмотря на то, что такой вариант получится дороже, он обеспечит 100%-ю работоспособность и надежность.
А сейчас давайте рассмотрим другие, нестандартные, но довольно распространенные методы регулировки и стабилизации.
Способ 2
Здесь используется микросхема типа TDA 1085 со стандартной платой. Можно при желании создать собственную, «модернизировав» и изменив неподходящие элементы. К примеру, можно применять двухстороннюю печатную плату. Конденсаторные и резисторные детали могут применяться при поверхностном монтаже. Рекомендуется развести друг от друга низко- и высоковольтные цепи. А «земля» должна разводиться с учетом параметров микросхемы.
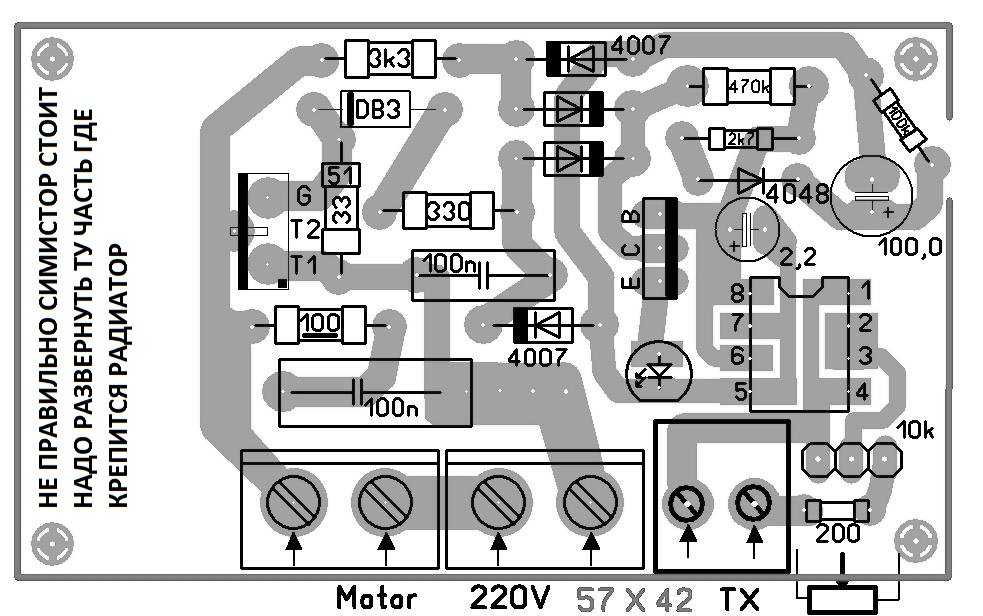
Пример собранной платы
В результате получается компактная двусторонняя плата, обеспечивающая точное регулирование.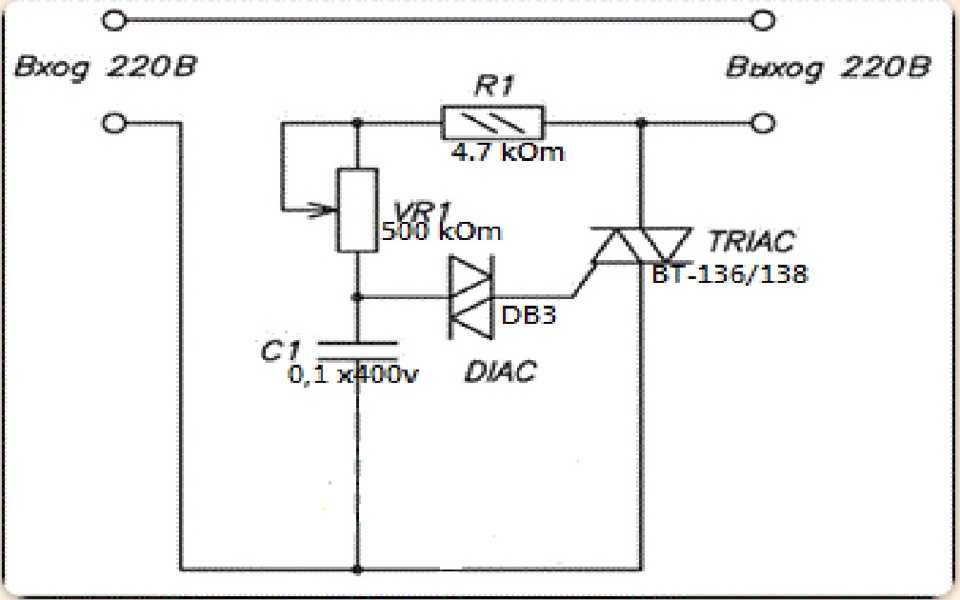
Частотная регулировка
Для решения этой задачи применяются частотные преобразователи (драйверы, инверторы), которые присоединяются к прибору. Они обеспечивают выпрямление напряжения, поступающего от источника. Агрегаты внутри формируют напряжение и частоты на необходимых уровнях. Далее осуществляется подача этих параметров на эл двигатель.
Стабилизация коллекторного двигателя 12вВсе характеристики, необходимые для регулирования работы, частотник рассчитывает сам, ориентируясь на внутренние алгоритмы, которые установлены производителем.
Из преимуществ такого способа стоит выделить:
- быстрое достижение плавности регулировки частот оборотов электрического мотора;
- возможность изменения скоростей и направлений вращения моторов;
- требуемые параметры поддерживаются самостоятельно;
- экономические выгоды.
Из слабых сторон стоит выделить обязательность наличия преобразователя, который нужно приобретать отдельно.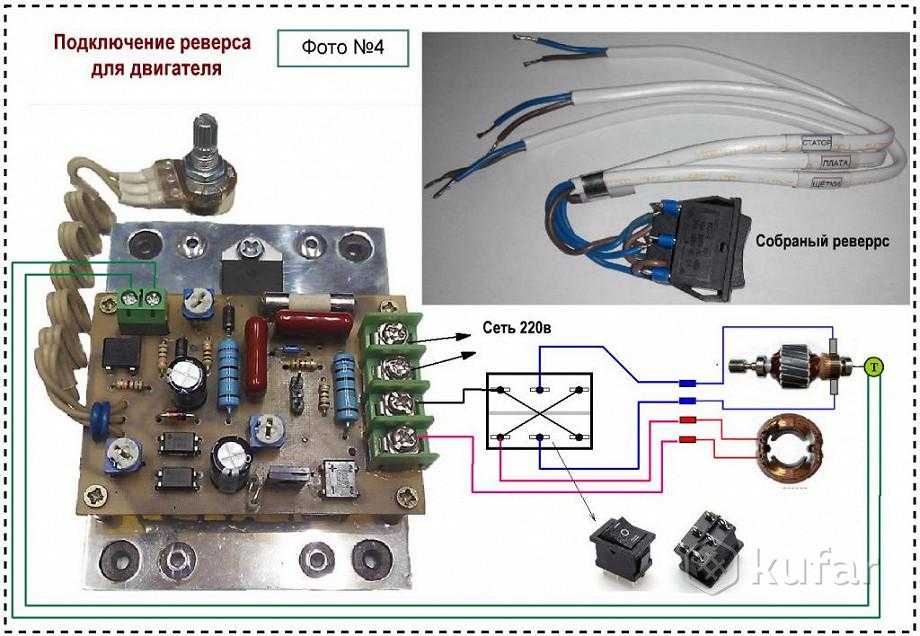 Но, справедливости ради отметим, что цена на частотники невысокая и они легко впишутся в бюджет любого дома, хозяйства, предприятия.
Но, справедливости ради отметим, что цена на частотники невысокая и они легко впишутся в бюджет любого дома, хозяйства, предприятия.
Изменение числа полюсов
Уменьшение или увеличение количества пар полюсов – еще один эффективный способ провести регулировку. Этот вариант особо актуален для моделей двигателей многоскоростного действия со сложными роторными обмотками. Данные элементы разделены на определенные группы и чередуются в процессе работы. Осуществляется это посредством коммутации, подключением последовательным или параллельным способом.
К преимуществам такого варианта регулировки относят:
- высокий КПД силового агрегата;
- требовательные механические выходные характеристики.
Стоимость реализации – одна из самых высоких, если сравнивать с другими технологиями. Вес и размеры готовой установки также немаленькие, что требует наличия свободного места для монтажа. Сам мониторинг оборотов осуществляется со ступенью в 1500 – 3000 оборотов в минуту.
Проведение регулирование в моторах АС
Устройства, работающие от переменного напряжения, также поддерживают регулирование оборотов. Рассмотрим вкратце основные способы такого управления, характерные для АС модификаций с фазными роторами.
При помощи напряжения
Для этого используются автотрансформаторы типа ЛАТР, которые осуществляют изменение напряжения на моторных обмотках. Таким образом производится и регулирование оборотов вала.
Метод является подходящим также и для вариаций с короткозамкнутыми роторами. Оператор имеет возможность проводить управление в пределах от минимальных до номинальных параметров двигателя.
Регулятор
Определение сопротивления
Переменное сопротивление реостата (или несколько таких явлений) реализуется непосредственно в цепи ротора. Оно воздействует на роторное поле и показатели тока, из-за чего получается изменять величины скольжения и точное число оборотов электродвигателя. Существует закономерность: чем уровень тока меньше, тем выше показатель скольжения двигателя и меньше скорость.
Преимущества:
- широкий диапазон регулирования оборотов электрического оборудования;
- сдержанные выходные характеристики машины.
К недостаткам относят:
- уменьшение продуктивности мотора;
- общее снижение рабочих параметров механизма.
Применение двойного питания
Здесь используются двигатели с двойным питанием, подающимся через вентильные приспособления. Основной упор делается на изменение показателей скольжения. При регулировании работы крупных специализированных машин, компонент подает и регулирует величину ЭДС (электродвижущей силы) на ротор от отдельно выбранных источников напряжения.
Вывод
При подаче напряжения у асинхронных моделей моторов наблюдаются рывки ротора. Это явление негативно влияет на работу, как самого агрегата, так и его привода. Именно поэтому, регулировка осуществляется по принципу плавного старта. Он обеспечивается такими факторами:
- старт посредством ЛАТР;
- разгон и работу мотора путем переключения обмоток по схемам треугольник/звезда;
- применение защитных устройств, например, частотного преобразователя.
Важно при регулировании оборотов не потерять в мощности. Применение вышеописанных методов позволит определить вращения без снижения продуктивности. Широкий выбор заводских моделей, но, можно реализовать деталь и самостоятельно.
Регулятор оборотів колекторного двигуна зі зворотним зв’язком
Опис
Плата регулятор оборотів без втрати потужності для двигунів від пральних машин, controller TDA1085
Повністю зібрана налаштована і перевірена плата регулювання обертів двигунів від пральних машин без втрати потужності для двигунів потужністю до 1000 Вт. Плата зібрана на оригінальному контролері TDA1085C? а не його дешевих аналогах/ Встановлений потужний симистор з струмом до 40 А що забезпечує великий запас пристрою по потужності. Дана плата служить для управління колекторним двигуном який оснащений таходатчиком або датчиком холу. Такі двигуни встановлені на сучасні пральні машини Indesit, Samsung, LG та інших. Регулятор дозволяє змінювати швидкість обертання вала двигуна з підтриманням потужності в межах від 0 до15000 обертів вминуту. Швидкість обертання двигуна відстежується тахогенератором.
Дана плата служить для управління колекторним двигуном який оснащений таходатчиком або датчиком холу. Такі двигуни встановлені на сучасні пральні машини Indesit, Samsung, LG та інших. Регулятор дозволяє змінювати швидкість обертання вала двигуна з підтриманням потужності в межах від 0 до15000 обертів вминуту. Швидкість обертання двигуна відстежується тахогенератором.
Відео огляд плати регулятора обертів зі зворотним зв’язком:
Плата забезпечує підтримку обертів без втрати потужності навіть на мінімальних обертах двигуна!
Так як двигуни від пральних машин володіють високою надійністю, і досить доступні за ціною,при цьому у багатьох просто лежать вдома без діла від зламаної пральної машини, то їх широко застосовують для виготовлення різних верстатів і пристосувань: точильних верстатів, токарних і навіть фрезерних верстатів, свердлильних верстатів, медогонок, гончарних кругів, та іншого обладнання.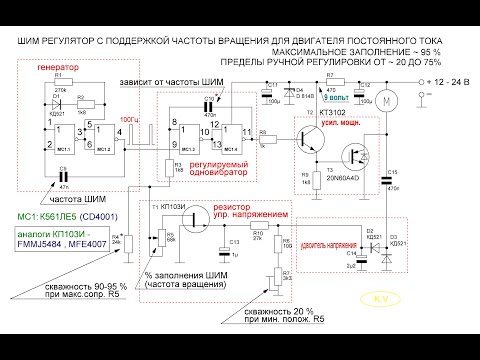
Плата не тільки регулює оберти, але і надійно підтримує їх при появі навантаження на валу!
На платі встановлені підстроювальні резистори для налаштування:
— Максимальних обертів
— Швидкості набору обертів при обертанні потенціометра
— Швидкості реакції плати на появу навантаження на валу
— Налаштування та синхронізації роботи таходатчика
Комплектація плати регулятора обертів:
1. Спаяний, налаштована і перевірена плата регулятора обертів.
2. Змінний резистор з пластиковою ручкою.
3. Клавішний перемикач включення контролера.
4. Клавішний перемикач напрямку обертання (Для реверсу).
5. Світлодіод індикації.
6. Запасний запобіжник.
7. Короткий опис.
Є в наявності комплект плати регулятора обертів з усіма необхідними проводами. Крім самої плати в комплект входить:
- Мережевий шнур для підключення живлення довжиною 1 метр.
- Провід для підключення таходатчика довжиною 1 метр
- Дроти для підключення двигуна з розпаяним тумблером реверсу. Від тумблера до двигуна 1 метр
- Світлодіод з проводом 20 див.
- Тумблер включення з проводом 20 див.
- Резистор регулятора обертів з проводами 20 див.
- Запасний запобіжник і короткий опис додаються
 Від тумблера до двигуна 1 метр
Від тумблера до двигуна 1 метрВартість плати регулятора обертів з комплектом проводів становитиме 800 грн. Якщо вам потрібний такий комплект, то обов’язково повідомте про це по телефону і напишіть в коментарі до замовлення.
Техніка безпеки при роботі з регулятором
Для того щоб уникнути ураження електричним струмом при поводженні з регулятором обертів, дотримуйтесь основні заходи безпеки:
— Ніколи не доторкайтеся до підключеного до мережі 220v платі руками.
— З обережністю проводите налаштування плати, при необхідності робіть це за допомогою викрутки з прогумованою ручкою.
— Будьте обережні з перемінним резистором, на ньому теж присутня напруга в місцях підключення до клем і у місцях з’єднання з проводами.
— Настійно рекомендую спочатку підключити двигун і мережевий провід до плати, а потім вже підключати до мережі 220V.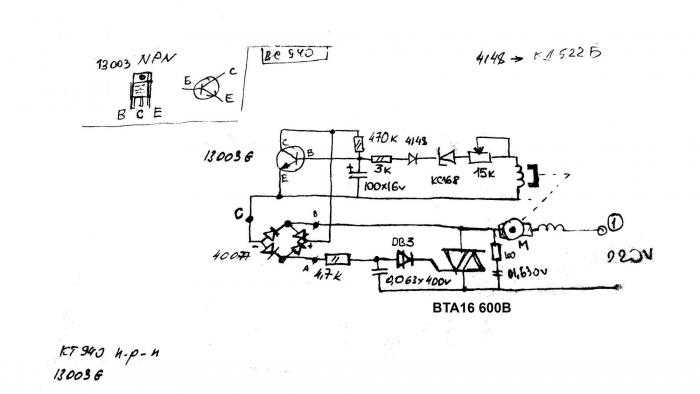 — Бажано плату помістити в корпус, передбачивши отвори
— Бажано плату помістити в корпус, передбачивши отвори
для вентиляції. Якщо корпус металевий обов’язково його заземляємо, разом із двигуном.
— Не допускайте перегріву симістора, відстежуйте температуру шляхом на радіаторі. Температура не повинна перевищувати 80°С. Не торкайтеся до радіатора до відключення регулятора від мережі.
— Пам’ятайте, що в разі виходу симістора з ладу, двигун може вийди на максимальні оберти, тому встановіть кнопку аварійного відключення живлення.
Ознайомитися зі схемою підключення даної плати до двигуна, а так само особливості підключення датчика Холла ви можете в статті перейшовши за посиланням
Схема комутації реверсу двигуна:
Відео огляд підключення реверсу до плати регулятора обертів
Характеристики
Інформація для замовлення
AB-026: Бездатчиковый стабилизатор скорости для двигателя постоянного тока
Стабилизатор скорости без датчика для двигателя постоянного тока
Введение
Скорость двигателя — это параметр двигателя постоянного тока, который часто измеряется и контролируется, как правило, с помощью дополнительных датчиков и обратной связи с обратной связью.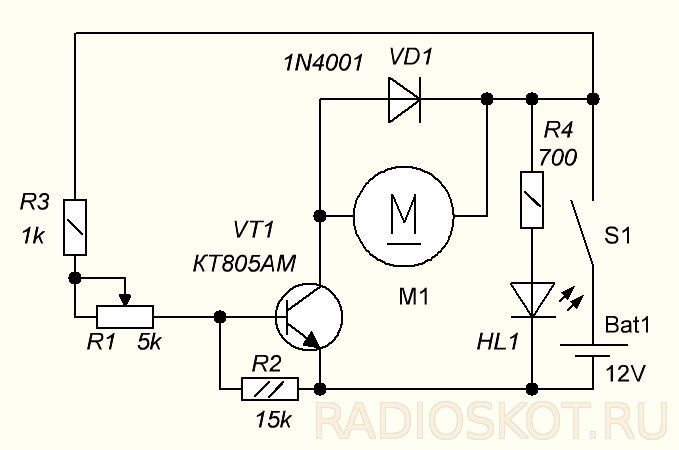 Для этого метода управления скоростью требуется какой-либо датчик скорости, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторы имеют задние валы именно для этой цели, например, 212-109.
Для этого метода управления скоростью требуется какой-либо датчик скорости, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторы имеют задние валы именно для этой цели, например, 212-109.
Система управления с обратной связью для скорости двигателя постоянного тока
Эта блок-схема представляет собой типичную систему управления с замкнутым контуром, которая может быть спроектирована для аналогового или цифрового управления.
Датчики Холла и оптические датчики обычно используются с цифровыми контроллерами, тогда как в аналоговых схемах часто используются тахогенераторы. При ШИМ-управлении можно добиться хорошей точности, гибкости и снизить потери мощности. Однако это происходит за счет дополнительного компонента и, возможно, модификации механической конструкции, если вы планируете использовать его в существующем продукте.
Для коллекторных двигателей постоянного тока можно измерять и контролировать скорость без каких-либо датчиков на двигателе, используя базовую характеристику — напряжение противо-ЭДС, зависящее от скорости.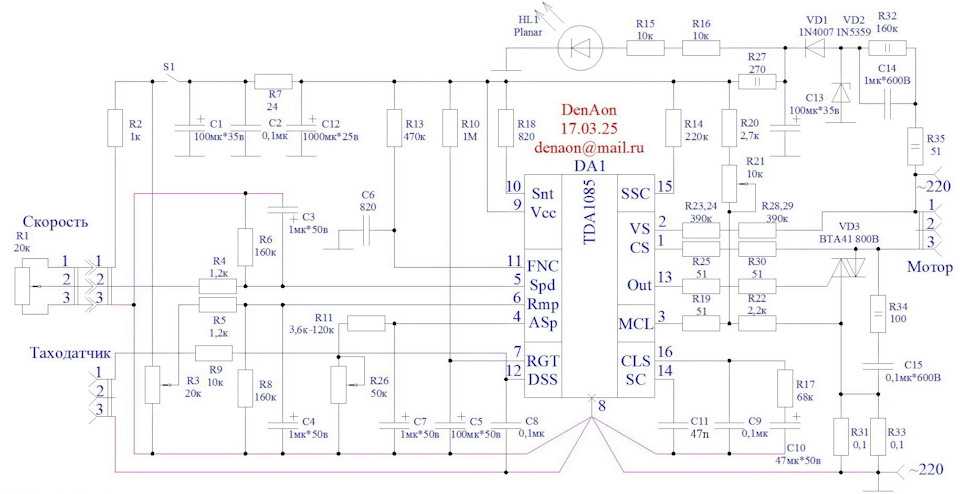
Аналоговое измерение скорости двигателя без датчика
Двигатель постоянного тока моделируется как последовательное соединение источника напряжения с внутренним сопротивлением и обратной ЭДС. Напряжение на клеммах двигателя представляет собой сумму противо-ЭДС и напряжения, падающего на сопротивление катушки.
Свяжитесь с нами по телефону
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные, экономичные миниатюрные механизмы и моторы, соответствующие вашим требованиям.
Эквивалентная схема коллекторного двигателя постоянного тока
Падение напряжения на внутреннем сопротивлении якоря зависит от тока двигателя (и, следовательно, от момента нагрузки). Невозможно измерить скорость напрямую, измеряя только напряжение на клеммах двигателя.
Сопротивление обмотки Ra, как правило, постоянное – хотя оно и имеет небольшую температурную зависимость, мы можем компенсировать его, чтобы падение напряжения на якоре двигателя было пропорционально току двигателя.
Поскольку прямое измерение противоЭДС невозможно, нам необходимо рассчитать ее по следующему уравнению:
К сожалению, напрямую измерить напряжение якоря тоже нельзя, однако можно подключить дополнительный (внешний) резистор последовательно с двигателем. Измерение падения напряжения на этом последовательном резисторе позволяет определить противо-ЭДС.
Эквивалентная схема коллекторного двигателя постоянного тока с последовательным резистором
Если мы установим значение последовательного резистора равным сопротивлению двигателя, мы гарантируем, что любое изменение падения напряжения на последовательном резисторе будет равно падению напряжения на якоре: 𝑉𝑎=𝐼𝑎×𝑅𝑎𝑉𝑠=𝐼𝑎× 𝑅𝑠𝑅𝑠=𝑅𝑎𝑉𝑠=𝑉𝑎
Итак, сначала нам нужно узнать или измерить сопротивление якоря двигателя. Это можно сделать, измерив сопротивление на клеммах двигателя с помощью омметра или измерив ток останова при известном напряжении питания. При использовании последнего предпочтительно использовать низкое напряжение питания, чтобы избежать повреждения из-за перегрузки по току.
Например, при поставке двигателя 1,2 В и измерением 100 мА во время стойла сопротивление якоря рассчитывается как: 𝑉𝑠𝑢𝑝𝑝𝑙𝑦 = 𝐼𝑠𝑡𝑎𝑙𝑙 × 𝑅𝑎𝑅𝑎 = 𝑉𝑠𝑢𝑝𝑝𝑙𝑦𝐼𝑠𝑡𝑎𝑙𝑙𝑅𝑎 = 1,2𝑉100𝑚𝐴𝑅𝑎 = 12 Ом
При использовании омметра для измерения сопротивления выводов усредните несколько показаний при различных положениях ротора.
Напряжение питания будет равно последовательному напряжению резистора, напряжению сопротивления якоря и напряжению обратной ЭДС.
Мы можем вычислить напряжение обратной ЭДС, вычитая двойное падение напряжения на последовательном резисторе из напряжения питания.
Чтобы уменьшить потери мощности, мы можем использовать более низкое значение последовательного сопротивления, но резистор в конечном итоге уменьшит напряжение, воспринимаемое двигателем. С помощью мостовой схемы можно сохранить высокую чувствительность измерения и компенсировать потери мощности в двигателе:
Мостовая схема для измерения напряжения противо-ЭДС
Правая ветвь моста состоит из последовательно соединенных двигателя M и резистора Rs . Левая ветвь представляет собой последовательное соединение резисторов R1 и R2 , каждая ветвь подключена к источнику питания. Напряжение противоЭДС измеряется между точками A и B .
Rнагрузка представляет собой входное сопротивление нашей измерительной схемы. Поскольку он будет состоять из операционного усилителя, его входное сопротивление будет намного больше, чем другие сопротивления в этой схеме (идеальные операционные усилители имеют бесконечное входное сопротивление).
Нам необходимо убедиться, что напряжение между точками A и B не зависит от тока двигателя и напряжения питания и зависит только от скорости двигателя и входного сопротивления измерительной цепи ( Rload ).
Начнем с анализа цепи без обратной ЭДС, т.е. когда двигатель заглох. Чтобы мост был сбалансирован, напряжение между точками A и B должно быть равно нулю. Это происходит до тех пор, пока соотношение между R1 и R2 то же, что и Rs и Ra :𝑅2𝑅1=𝑅𝑎𝑅𝑠
h коэффициент усиления нашего моста:ℎ=𝑅1𝑅2=𝑅𝑠𝑅𝑎
Если мы выведем двигатель из состояния остановки, напряжение противоЭДС будет пропорционально скорости:𝑉𝑏𝑒𝑚𝑓=𝑘𝑒×𝑛
, где ke — электрическая постоянная для нашего двигателя, а n — скорость двигателя.
Если двигатель может вращаться на скорости холостого хода, для идеального двигателя мы ожидаем, что Ia равно 0. Это связано с тем, что идеальные двигатели не учитывают сопротивление воздуха и трение в подшипниках. Напряжение на скорости без нагрузки:𝑉𝑟𝑝𝑚𝑁𝐿=𝑘𝑒×𝑛𝑁𝐿
Из этого Vbemf может быть подписано как:
Где K — пропорциональный коэффициент между Vbemf и V_rpm в нашей схеме.
Теперь мы можем составить систему уравнений для нашей схемы:
Текущие уравнения
Решение для I5 :𝐼5=ℎ(ℎ+1)𝑉𝑟𝑝𝑚𝑁𝐿×𝐾2ℎ(𝑅𝑎+𝑅2)+(ℎ+1)2×𝑅𝑙𝑜𝑎𝑑
Таким образом, выходное напряжение равно: 𝑉𝑟𝑝𝑚 = 𝐼5 × 𝑅𝑙𝑜𝑎𝑑 = ℎ (ℎ+1) × 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾2ℎ (𝑅𝑎+𝑅2)+(ℎ+1) 2 × 𝑅𝑙𝑜𝑎𝑑 × 𝑅𝑙𝑜𝑎𝑑
И для работы без нагрузки:𝑉𝑟𝑝𝑚=ℎℎ+1×𝑉𝑟𝑝𝑚𝑁𝐿×𝐾
Выходное напряжение между точками A и B не зависит от источника питания и тока двигателя как без нагрузки, так и в режиме нагрузки. Оно зависит от х , и при увеличении выходного напряжения также увеличивается.
Как упоминалось ранее, сопротивление якоря будет меняться в зависимости от температуры, что разбалансирует мост и повлияет на выходную мощность об/мин . Мост следует настраивать при рабочей температуре двигателя, чтобы свести к минимуму этот эффект.
Этот метод стабилизации скорости был популярным решением для регуляторов скорости ротора регулятора скорости, используемых в магнитофонах с использованием аналоговой электроники. В эпоху магнитофонов многие компании производили микросхемы для управления двигателем постоянного тока, чтобы лента двигалась с постоянной скоростью. Это было интересное решение, потому что оно работало линейно и не создавало шума, как контроллеры на основе ШИМ.
Общие ИС
включали LA5586, TDA7274, BA6220 и AN6550. К сожалению, большинство из них снято с производства и теперь доступно только на вторичном рынке. Схемы в ИС были немного другими, но принцип работы по-прежнему основан на мостовой схеме выше.
Эквивалент контроллера скорости двигателя LA5586 и прикладная схема
Обратите внимание, что эквивалентная схема нарисована с источниками тока и постоянным коэффициентом тока. Коэффициент текущей ликвидности составляет от 20 до 40, в зависимости от конкретной микросхемы, и обозначается как 9.0055 К . В интегральных схемах легко сделать два источника тока с одинаковыми температурными параметрами.
Двигатель подключен к одному плечу моста, а второе плечо содержит резистор со значением K раз больше, чем внутреннее сопротивление двигателя.
Цепь установившегося режима для контроллера двигателя
В установившемся режиме ток двигателя в K раз больше, чем ток через Rt . Отрицательный вход ОУ подключен к источнику напряжения, поэтому падение напряжения на резисторе Rt всегда будет ниже напряжения двигателя. Разница будет равна Vref . Напряжение в точке A (относительно земли) всегда будет выше, чем напряжение в точке B .
Без Rs ток через Rt в 40 раз меньше тока двигателя. Когда нагрузка двигателя увеличивается, напряжение в точке B увеличивается, а также увеличивается выходное напряжение усилителя. Более высокое напряжение усилителя вызывает более высокий ток двигателя, что увеличивает крутящий момент двигателя. Регулирование скорости может быть достигнуто добавлением шунтирующего резистора – напряжение между точками A и B всегда равны опорному напряжению, поэтому легко контролировать дополнительный ток, добавляемый к Rt .
Эта цепь будет сбалансирована, когда напряжение двигателя равно сумме напряжений между Rt и Rs ( Vref ). Уравнение устойчивого состояния: 𝐼𝑚 × 𝑅𝑚+𝑉𝑏𝑒𝑚𝑓 = 𝑅𝑇 × 𝐼𝑠+𝑅𝑇 × 𝐼𝑠+𝐼𝑚𝐾+𝑉𝑟𝑒𝑓
Из этого уравнение для заднего ЭМФ: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓+(1+1𝐾) × 𝑅𝑇 × 𝐼𝑠+𝑅𝑇𝐾 –𝑅𝑚×𝐼𝑚
Предполагая:𝐾×𝑅𝑚=𝑅𝑇
тогда количество оборотов определяется VBEMF : 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓+𝑅𝑇 × (1+1𝐾) × 𝐼𝑠
Важно, чтобы во всех случаях RT составлял менее K x RM , в противном случае схема была переполнена и нестабильной.
Аналоговый регулятор скорости с отрицательным сопротивлением
Увеличение нагрузки на двигатель приводит к увеличению потребляемого тока и снижению скорости. Обратная ЭДС и напряжение на двигателе также уменьшаются, этот метод управления известен как регулятор отрицательной клеммы.
В этом случае мы используем операционный усилитель для управления скоростью, поэтому наше R_load будет на тысячи больше, чем другие сопротивления в этой цепи, и его снова можно опустить.
Из предыдущего раздела мы знаем, что напряжение источника питания не изменилось Vrpm , что позволяет нам питать нашу схему от мощного операционного усилителя или добавлять транзистор к выходу стандартного операционного усилителя. усилитель Подключив инвертирующий вход к плечу моста, между двигателем и последовательным резистором, мы можем управлять питанием моста напряжением, подключенным к неинвертирующему выходу.
Цепь управления напряжением двигателя
Входное напряжение подается на неинвертирующий вход операционного усилителя, а инвертирующий вход подключается непосредственно к клемме двигателя. Мы пока не можем управлять скоростью с помощью схемы, в связи с этим наш усилитель работает как буфер (или повторитель напряжения) с коэффициентом усиления равным 1. По сути, входное напряжение определяет напряжение двигателя.
Можно изменить скорость двигателя, задав напряжение Vin, но это не поддерживает постоянную скорость при изменении нагрузки. При постоянном входном напряжении двигатель будет вращаться быстрее при малых нагрузках и медленнее при увеличении нагрузки. Нам нужно еще несколько компонентов для стабилизации скорости двигателя.
Падение напряжения на Rs пропорционально падению напряжения на сопротивлении якоря двигателя, мы будем использовать это напряжение для компенсации падения напряжения на сопротивлении якоря. Это можно сделать, изменив схему к приведенной ниже — добавив R1 и R2 и подключив их среднюю точку к неинвертирующему входу операционного усилителя.
Цепь регулятора скорости двигателя
Соотношение R1 и R2 должно быть таким же, как Rs и Ra для обеспечения стабилизации скорости. На изображении выше показана полная схема и ее эквивалент для справки, управляющее напряжение должно быть таким же, как напряжение обратной ЭДС на желаемой скорости.
Коэффициент компенсации определяется значением Rs , но удобнее использовать стандартное значение сопротивления, чем менять R1 или R2 соответственно.
Если скорость двигателя снижается при приложении нагрузки, R2 значение должно быть увеличено (или R1 должно быть уменьшено). Если скорость двигателя начинает колебаться (или имеет тенденцию к увеличению) при приложении нагрузки, R2 следует уменьшить или ( R1 следует увеличить).
Чтобы спроектировать эту схему, нам нужно знать, какова величина противо-ЭДС при желаемой скорости:
- Чтобы определить напряжение противо-ЭДС на желаемой скорости, вал двигателя можно установить на бурильную машину и привести в движение. Достигнув желаемой скорости (проверено тахометром), измерьте напряжение на клеммах двигателя с помощью высокоимпедансного вольтметра.
- Измерьте внутреннее сопротивление обмотки с помощью омметра на клеммах двигателя, рекомендуется получить среднее значение из нескольких различных измерений положения ротора.
- Выберите значение Rs из стандартных значений, оно может быть меньше сопротивления двигателя.
- Выберите R1 и R2 , чтобы соотношение было таким же, как соотношение между Rs и Ra . Фактические номиналы резисторов должны быть больше Rs и Ra для экономии тока. Поскольку эквивалентное сопротивление ветвей моста будет разным, операционный усилитель должен быть с низким входным током.
- Подайте управляющее напряжение, соответствующее требуемой противо-ЭДС.
- Проверьте скорость и внесите соответствующие коррективы (указанные в абзаце перед этим списком).
Для температурной компенсации можно выбрать Rs с тем же температурным коэффициентом, что и у обмоток двигателя – для меди 3400ppm. Этот резистор следует разместить как можно ближе к двигателю, чтобы поддерживать одинаковый температурный режим.
Простую схему стабилизации скорости двигателя можно сделать только на транзисторах:
Транзисторный регулятор скорости
В этой схеме T2 работает как выходной каскад, а T1 как усилитель ошибки. Сигнал на коллекторе T1 является выходным сигналом, эмиттер работает как инвертирующий вход, а база — как неинвертирующий вход.
Сигнал напряжения на двигателе подключен к неинвертирующему входу, поскольку выходной каскад инвертирует этот сигнал, что означает, что больший сигнал на коллекторе вызывает меньший ток двигателя.
Диоды D1 и D2 создают опорное напряжение, напряжение на эмиттере Т1 всегда ниже напряжения на клеммах двигателя. Напряжение компенсации берется из R3 и вычитается из напряжения питания моста, которое измеряется делителем напряжения R4 , R5 и R1 .
R7 и C2 представляют собой схему запуска, помогающую преодолеть статическое трение, а C1 — это конденсатор частотной компенсации, предотвращающий высокочастотные колебания.
Поскольку нам необходимо точное измерение противоЭДС, которое зависит от контактного сопротивления между коллектором и щетками, лучше всего использовать двигатели с металлическими щетками. Большинство двигателей Precision Microdrives имеют металлические щетки и подходят для этого метода регулирования скорости.
Регулятор скорости со специализированной ИС
Эта схема основана на AN6651, специализированном контроллере двигателя, ранее популярном в магнитофонах.
AN6651 работает по тому же принципу, что и LA5586, описанный выше. Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40:1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя при таком же падении напряжения на R1 , как и на внутреннем сопротивлении двигателя: 𝐾=40 𝑅1=𝐾×𝑅𝑚
AN6651 работает по тому же принципу, что и LA5586, описанный выше. Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40:1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя: 𝐾=40 𝑅1=𝐾×𝑅𝑚
Например, используя стандартное значение 390 Ом для R1 (более низкое значение снижает тенденцию к возникновению колебаний), нам нужно найти значения для последовательного соединения R2 и R3. Давайте воспользуемся двигателем постоянного тока 132-100 и установим целевую скорость 2400 об/мин. Сначала нам нужны некоторые технические детали:
- Сопротивление двигателя, 𝑅𝑚 = 10 Ом
- Входное напряжение для нагрузки NO со скоростью 2400 об / мин, 𝑉𝑚 = 3,87𝑉
- ток для нагрузки NO со скоростью 2400 об / мин, 𝐼𝑚 = 23𝑚𝐴
9 0006666. Мы можем расчет. на внутреннее сопротивление как: 23 Ом × 10 Ом = 0,23 Ом
, и мы также можем рассчитать Vbemf как: 3,87 Ом −0,23 Ом = 3,65 Ом
В установившемся режиме, когда цепь сбалансирована, уравнение для цепи: × 𝑅𝑚+𝑉𝑏𝑒𝑚𝑓 = 𝑅1 × (𝐼𝑅2𝑅3+𝐼𝑅2𝑅3+𝐼𝑚𝐾+𝑉𝑟𝑒𝑓
Из этого уравнения мы можем рассчитать заднюю ЭМФ: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓+𝑅1 × (1+140) × 2𝑅3
Как мы знаем из таблицы данных Vref = 1V, так: 𝐼𝑅2𝑅3 = 𝑉𝑏𝑒𝑚𝑓 — 𝑉𝑟𝑒𝑓𝑅1 × (1+140)
Для нашего двигателя есть: 𝐼𝑅2𝑅3 = 3,64–1390 × (1+140) 𝐼𝑅2𝑅3 = 0,0051𝐴 = 5,1𝑚𝐴
С этим значением мы можем рассчитать последовательное сопротивление R2 и R3 : 𝐼𝑅2𝑅3 = 𝑉𝑟𝑒𝑓𝑅2+𝑅3𝑅2+𝑅3 = 𝑉𝑟𝑒𝑓𝐼𝑅2𝑅3𝑅2+𝑅3 = 195 ОД
Мы можем использовать константный стандартный сопротивление 150 ω плюс а плюс плюс плюс а плюс плюс а плюс плюс плюс плюс а плюс. Потенциометр на 100 Ом, что дает нам диапазон для точной настройки. Вычисленные значения являются приблизительными, в реальной цепи ток внутреннего источника опорного напряжения также значителен (от 0,8 до 2 мА для AN6651), это вызовет изменение тока двигателя.
Добавление потенциометра позволяет настройке регулировать скорость, и его необходимо откалибровать через некоторое время, чтобы двигатель прогрелся до рабочей температуры, чтобы свести к минимуму результирующий сдвиг сопротивления.
132-100 и цепь регулятора скорости AN6651
Плата Precision Microdrives 132-100 с AN6651
Плата Precision Microdrive 132-100 с AN6651
Регулятор скорости с дискретным операционным усилителем
Это улучшенная версия схемы операционного усилителя, описанной выше, с использованием специальной ИС. Основным улучшением является работа при низком напряжении благодаря использованию эталона с низким напряжением запрещенной зоны. Использование этого дискретного компонента минимизирует размер схемы, что идеально подходит для современных небольших корпусов.
В этой схеме компенсационное напряжение берется с последовательно включенного резистора R8 , значение которого меньше внутреннего сопротивления двигателя для снижения потерь мощности. Вторая опора моста состоит из R6 и R7 . Соотношение этих резисторов должно быть таким же, как R8 и сопротивление обмотки двигателя. R8 можно выбрать в качестве типового значения, тогда R6 и R7 следует выбрать для компенсации внутреннего падения напряжения. Для стабильной работы коэффициент R7 / R6 должно быть больше, чем Rm / R8 .
Эта схема подходит для небольших двигателей с номинальным напряжением 1В ~ 2В.
Схема стабилизации скорости двигателя на основе операционного усилителя
Регулятор скорости с транзисторами
Эта недорогая схема построена на транзисторах для управления скоростью двигателя, хотя она не обеспечивает такой же точности, как операционный усилитель, ее можно сделать очень маленькой и полезной для недорогих приложений.
В этой схеме опорное напряжение составляет 1,2 В, а D1 работает как опорное напряжение. Противо-ЭДС двигателя больше, чем опорное напряжение – в зависимости от делителя напряжения R2 , R3 и R4 :
- требуемая обратная ЭДС составляет 3,6 В, делитель напряжения R2 , R3 и R4 должен иметь коэффициент: 3,61,2=3·
- Итак, у нас есть максимальный диапазон для тонкой настройки схемы, это нужно делать, когда потенциометр ( R3 ) находится в среднем положении. Теперь нам нужно разделить оставшееся значение между каждым из остальных резисторов.
- Когда мы знаем коэффициент делителя напряжения, выбрать R6 и R8 несложно. Нам нужно иметь такое же соотношение между делителем напряжения и R6 , R8 и внутренним сопротивлением двигателя.
Эта схема рассчитана на одну постоянную скорость, и изменение скорости с помощью триммера влияет на компенсацию скорости. Таким образом, триммер следует использовать только для настройки этой схемы в очень низкоскоростных диапазонах. Чтобы использовать эту схему с широким диапазоном настройки скорости, нам нужно внести некоторые изменения:
Двухтранзисторный регулятор скорости двигателя
Трехтранзисторный регулятор скорости двигателя
Эта схема работает по тем же правилам, что и предыдущая двухтранзисторная версия, но основное улучшение заключается в увеличении коэффициента усиления опорного напряжения на транзисторе Q2 . Это позволяет нам использовать опорное напряжение с запрещенной зоной микромощности, которое более стабильно, чем стандартные диоды. Еще одним улучшением от добавления Q2 является температурная компенсация Vbe между 9Транзисторы 0055 Q1 и Q2 .
Расчет этой схемы начинается с задания напряжения противо-ЭДС. В этой схеме опорное напряжение равна LM385 — 2,5 В и напряжению VBE из Q2 : 𝑉𝑟𝑒𝑓 = 𝑉𝑏𝑔𝑟𝑒𝑓+𝑉𝑏𝑒 = 1,2𝑉+0,7𝑉 = 1,9 0007
, если нам нужно VBEMF , чтобы быть 3,8V. , коэффициент делителя напряжения R2 , R4 и R3 должен быть 2:1. Потенциометр ( R3 ) предназначен для точной настройки этого напряжения, но в этой схеме изменение скорости с помощью триммера вызовет изменение компенсации. Итак, R3 предназначен только для окончательной настройки скорости в небольшом диапазоне, скажем, 5% или меньше, и должен использоваться только для компенсации допуска других значений компонентов.
После настройки этого делителя напряжения выбор значений R6 и R7 становится простым, если известно внутреннее сопротивление двигателя. Эквивалентное параллельное соединение R6 , R7 и сопротивление двигателя должно иметь то же соотношение, что и R2 , R3 и R4 делителя напряжения (с R3 потенциометр установлен в среднее положение).
Precision Microdrives Трехтранзисторный контроллер скорости двигателя
Precision Microdrives Трехтранзисторный контроллер скорости двигателя
Аналоговый регулятор скорости с режимом переключения
В данных указаниях по применению описывается простая реализация аналогового регулятора скорости двигателя, основанная на измерении противо-ЭДС и управляющем ШИМ-сигнале.
При использовании ШИМ с двигателем постоянного тока по-прежнему можно управлять скоростью двигателя без каких-либо датчиков. Используя обычный недорогой драйвер с одним полевым МОП-транзистором, можно измерить противо-ЭДС, когда двигатель вращается, а транзистор закрыт.
Управление скоростью двигателя с помощью противо-ЭДС в режиме переключения аналоговая схема
Этот контроллер состоит из ШИМ-модулятора, выходного транзистора и схемы «выборки и удержания» (иногда называемой схемой «следуй и удерживай»). Модулятор PWM имеет управляющий вход, который позволяет изменять рабочий цикл. Если это незнакомо, это может показаться сложным, но общая идея довольно проста:
- когда транзистор включен, напряжение питания подключено к клеммам двигателя, ток двигателя Im протекает через двигатель, заставляя его ускоряться
- , когда транзистор выключен, двигатель действует как генератор, а Vm равно Vbemf , что пропорционально скорости двигателя. Запускается схема Sample & Hold, которая сохраняет выборку Vbemf в конденсаторе
Затем суммирующий узел вычисляет разницу между требуемой скоростью и текущей скоростью, поскольку обе они представлены напряжением (желаемое напряжение и
).0055 Vbemf соответственно). Это напряжение ошибки используется для управления скоростью двигателя путем увеличения или уменьшения рабочего цикла модулятора ШИМ.
Из-за индуктивной природы двигателей постоянного тока измерение противо-ЭДС невозможно сразу после выключения транзистора. Когда транзистор переключается, генерируется сильный индуктивный всплеск, и индуктивный рециркуляционный ток Ir протекает через реверсивный диод. Необходима короткая задержка, пока напряжение противоЭДС не станет стабильным:
Измерение сигнала ШИМ на клеммах двигателя
Этот метод управления может быть выполнен с использованием только аналоговых компонентов или цифровых с микроконтроллером. Практическая реализация контроллера, основанного на этом методе и использующего двигатель постоянного тока 132-100, показана ниже:
Регулятор скорости двигателя на основе измерения противо-ЭДС и выхода ШИМ
В этой схеме напряжение на R2 представляет желаемую скорость, IC1A работает как усилитель ошибки и ПИД-регулятор.
Схема модулятора ШИМ состоит из IC1B и IC2 , где IC1B работает как генератор треугольных волн с частотой, определяемой R12 и C4 .
IC2 действует как компаратор, который сравнивает напряжение треугольного сигнала с выхода IC2 с заданным напряжением потенциометра R15 . Когда напряжение сигнала треугольника ниже, чем напряжение от R15 , выход компаратора высокий, и двигатель включен.
Цепь Sample & Hold изготовлена C3 , R10 , D2 , Q1 , R13 . Когда двигатель питается от T1 , Q2 включен, а узел R13 и D2 закорочен на землю, что не позволяет сделать выборку при подаче напряжения Vcc на двигатель. Диод D2 предотвращает разряд C3 , когда Q1 включен.
Когда T1 выключен, Q2 также выключен и Vbemf может заряжать конденсатор C3 . Напряжение на C3 подается на неинвертирующий вход усилителя ошибки IC1A . Этот усилитель вычитает текущее напряжение скорости из требуемого напряжения скорости (задается потенциометром R2 ). Когда противо-ЭДС увеличивается, выходное напряжение на IC1A также увеличивается — это сдвигает уровень сигнала треугольника вверх пропорционально погрешности скорости. Если уровень сигнала треугольника увеличивается, то время, в течение которого выходной транзистор находится во включенном состоянии, уменьшается, и коэффициент ШИМ также уменьшается.
Этот усилитель ошибки работает как схема ПИД-управления, где коэффициент усиления определяется 𝑅5𝑅5+𝑅10, а постоянная времени определяется R5 и C2 .
Схема Sample & Hold очень проста, потому что время выборки равно продолжительности состояния OFF в рабочем цикле PWM, поэтому напряжение выборки напрямую зависит от рабочего цикла. Кроме того, менее важно, если схема используется для управления приложением, которое не использует полный диапазон скорости двигателя. Его также можно уменьшить по выбору, изменив значения R10 , C3 и R13 , которые позволяют изменить время заряда/разряда C3 .
Диапазон изменения коэффициента заполнения ШИМ (от приложенного напряжения ошибки) определяется отношением R7 к R8 || R9 , однако, поскольку схема Sample & Hold настолько проста, этот диапазон не должен быть очень широким.
Эта схема предназначена для работы в узком диапазоне ШИМ, максимальный режим работы ШИМ уменьшается за счет задержки индуктивной нагрузки двигателя, а с учетом ограничений схемы Sample & Hold этот метод не следует использовать для широкий диапазон регулирования скорости.
Это демонстрирует принцип работы, поэтому для реального использования настоятельно рекомендуется улучшить простую схему Sample & Hold. Например, схема на недорогом LF398 может обеспечить время дискретизации 10 мкс.
По сравнению с аналоговой схемой отрицательной обратной связи этот метод:
- снижает потери мощности
- может быть более стабильным, так как температура не влияет на напряжение противоЭДС (за счет изменения сопротивления обмотки)
Однако также:
- не подходит для двигателей с высокой индуктивностью
- имеет узкий диапазон регулирования скорости
- имеет тенденцию к колебаниям
Информационный бюллетень
Подпишитесь на получение новых блогов, тематических исследований и ресурсов прямо на ваш почтовый ящик.
Зарегистрироваться
Имя
Первый
Последний
Адрес электронной почты (обязательно)
Согласие с условиями (обязательно)
Я прочитал и согласен с Условиями и Политикой конфиденциальности Precision Microdrives
Согласие на обсуждение (обязательно)
Я рад, что Precision Microdrives получил мои данные, чтобы мы могли обсудить мой запрос
Узнайте больше
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и испытанный сложный механизм — мы здесь, чтобы помочь. Узнайте больше о нашей компании.
- Почему PMD
- О нас
- Двигатели
- Механизмы
- Карьера
2114 — Регулятор скорости двигателя для больших двигателей постоянного тока
2114 — Регулятор скорости двигателя для больших двигателей постоянного тока — д-р Годфрид-Виллем Раес
Доктор Годфрид-Виллем RAES
Kursus Experimentele Muziek : Boekdeel
2: Живая электроника
Hogeschool Gent: Департамент музыки и драмы
| <Теруг Наар Инхудстафель Курсус> | ДВИГАТЕЛИ | Дит Хофдстукье это niet beschikbaar в Нидерландах. |
2114:
Применение
<Управление скоростью больших двигателей постоянного тока>
Скорость коллекторного двигателя постоянного тока (щеточный двигатель) зависит от приложенного напряжения.
Крутящий момент является функцией тока двигателя, поэтому его нельзя понизить.
скорость без снижения крутящего момента. Большие двигатели требуют довольно больших токов,
которые трудно контролировать с помощью схем регулирования тока или напряжения.
ШИМ — это стандартный ответ на проблемы, но у него есть свои каверзные стороны: если
модулированная волна слишком низкая (ниже звука) по частоте, двигатель станет
здоровенный источник звука и, следовательно, делать музыкальные приложения (автоматические инструменты)
почти невозможно. С другой стороны, если вы возьмете частоту намного выше звука,
тепло, выделяемое в силовом мосфете, может иметь тенденцию становиться непомерно высоким. Также
— важное соображение для наших собственных выступлений с использованием сонарных версий
мой невидимый инструмент — будет много ультразвукового шума, создающего гидролокатор
невозможный.
Итак, мы придумали совсем другой подход: вместо регулирования
источник питания постоянного тока с использованием последовательного транзистора, IGTB или MOSFET, мы разработали простой
схема, которая регулирует подачу переменного тока с помощью твердотельного симистора тиристора с нулевым переходом
модули. Мы использовали твердотельные реле Crouzet с диапазоном входного сигнала переключателя управления.
от 3 до 32 Вольт постоянного тока и мощностью выходного ключа до 10 А при минимальном напряжении переменного тока
от 24В.
Basic Stamp, микроконтроллер PIC, считывает байт из входного порта и
преобразует это в периодический импульс на выходном контакте 20. Минимальное время включения должно
быть 10 мс (для сети 50 Гц), и время включения/выключения этого сигнала будет определять
среднее напряжение, воспринимаемое двигателем. Твердотельные реле переключаются только
при переходе через ноль переменного напряжения. При частоте 50 Гц таких пересечений 100 в секунду.
Итак, если мы пропустим только 1 полуволну в секунду, выходное напряжение составит 1%
максимального значения. Если двигатель имеет очень малую массу, вы должны использовать очень
большой сглаживающий конденсатор на двигателе. Если двигатель имеет большую массу или приводы
какой-нибудь маховик (например, большой вентилятор), чем емкость конденсатора может
приниматься очень низко.
Это, очевидно, помогает для плавной работы двигателя, для распространения импульсов ВКЛ/ВЫКЛ.
равномерно в течение периода использования. Таким образом, для мощности 25% должна быть следующая схема:
б/у:
1000100010001000100010001000100010001000 ….
Для 50%:
1100110011001100110011001100110011001100…, каждый бит соответствует продолжительности
10 мс.
Выходной контакт 19 управляет реле, используемым для управления направлением вращения
двигателя (по часовой стрелке/по часовой стрелке). Контакт 13 показан подключенным к другому реле, с помощью которого
вся силовая цепь двигателя может быть включена или выключена.