Содержание
✔ Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
Электродвигатели постоянного тока
Используются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
Электродвигатели переменного тока
Пользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т. д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
Шаговые электродвигатели
Действуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
Серводвигатели
Относятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
Линейные электродвигатели
Обладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
Синхронные двигатели
Являются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
Асинхронные двигатели
Также, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Перейти в каталог электродвигаетелей
Электрические машины
В качестве энергоносителя в электрической машине может быть использовано как магнитное, так и электрическое поле. Машины, в которых для преобразования энергии используется магнитное поле, называются индуктивными, а те, в которых используется электрическое поле, — емкостными. Возможно также совместное использование магнитного и электрического полей. Такие машины называются индуктивно-емкостными.
На практике наибольшее распространение получили индуктивные машины.
Принято различать электромеханические преобразователи в зависимости от цели преобразования энергии на:
- генераторы — источники электрической энергии;
- электродвигатели — источники механической энергии;
- специальные электрические машины — электромеханические преобразователи с более сложным целевым назначением
Современные электрические машины имеют самое разнообразное конструктивное исполнение и могут реализовывать различные роды напряжения и тока, а также различные виды движения — вращательное, колебательное, линейное и т. д.
д.
Диапазон мощностей современных электрических машин составляет 10-17 — 109 Вт. На рисунке 1 показаны области распространения и зоны использования емкостных (график 1), индуктивно-емкостных (график 2) и индуктивных (график 3) электрических машин. Электрическая машина является весьма экономичным преобразователем энергии.
Рисунок 1 – Области распространения электрических машин
Для управления современными электрическими машинами используются сложные электронные системы, которые конструктивно объединяются с электромеханическим преобразователем и образуют так называемую электромеханотронную систему, выступающую как единый технический комплекс. Все это существенно расширяет функциональные возможности электрических машин и обеспечивает их широкое внедрение во все сферы производственной и бытовой деятельности человечества [1].
Основополагающие законы электромеханического преобразования энергии в индуктивных машинах
Закон Ампера
Согласно закону, установленному Ампером, на проводник с током в магнитном поле действует сила
,
- где F – сила, Н,
- I – сила тока, А,
- – длина проводника, м,
- B — магнитная индукция, Тл,
- — угол между направлением тока и вектором магнитной индукции, град.

Направление этой силы определяется по правилу «левой руки».
Закон электромагнитной индукции Фарадея
Открытие электромагнитной индукции в 1831 году Фарадеем — одно из фундаментальных открытий в электродинамики. Максвеллу принадлежит следующая углубленная формулировка закона электромагнитной индукции:
Всякое изменение магнитного поля во времени возбуждает в окружающем пространстве электрическое поле.
Циркуляция вектора напряженности E этого поля по любому неподвижному замкнутому контуру s определяется выражением [3] [4]
,
- где E – напряженность электрического поля, В/м,
- ds – элемент контура, м,
- Ф — магнитный поток, Вб,
- t — время, с
Электродвижущая сила индукции возникающая в замкнутом контуре, равна скорости изменения во времени потока магнитной индукции
,
- где – электродвижущая сила индукции, В
Знак «-» показывает, что индукционный ток, возникающий в замкнутом проводящем контуре имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.
Вращающаяся электрическая машина — электротехническое устройство, предназначенное для преобразования энергии на основе электромагнитной индукции и взаимодействия магнитного поля с электрическим током, содержащее, по крайней мере, две части, участвующие в основном процессе преобразования и имеющие возможность вращаться или поворачиваться относительно друг друга [2].
Вращающаяся машина постоянного тока, или машина постоянного тока — вращающаяся электрическая машина, основной процесс преобразования энергии в которой обусловлен потреблением или генерированием только постоянного электрического тока.
Вращающаяся машина переменного тока — вращающаяся электрическая машина, основной процесс преобразования энергии в которой обусловлен потреблением или генерированием переменного электрического тока.
Виды вращающихся электрических машин
По характеру магнитного поля в основном воздушном зазоре
Одноименнополюсная машина — вращающаяся электрическая машина, у которой нормальная составляющая магнитной индукции во всех точках основного воздушного зазора имеет один и тот же знак.
Разноименнополюсная машина — вращающаяся электрическая машина, у которой нормальная составляющая магнитной индукции в различных участках основного воздушного зазора имеет разные знаки.
Явнополюсная машина — разноименнополюсная машина, в которой полюса выступают в сторону основного воздушного зазора.
Неявнополюсная машина — разноименнополюсная машина с равномерным основным воздушным зазором.
- А.И.Вольдек, В.В.Попов. Электрические машины. Введение в электромеханику. Машины постоянного тока и трансформаторы. Учебник для вузов.-СПб.: Питер, 2007.
- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
- И.В.Савельев. Курс общей физики, том II. Электричество.-М.:Наука, 1970.
- Д.В.Сивухин. Общий курс физики. Т.III. Электричество.-М.:Наука, 1977.
Библиографический список
Электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Посмотреть все СМИ
- Ключевые сотрудники:
- Никола Тесла
Томас Давенпорт
Ипполит Фонтейн
Майкл Фарадей
- Похожие темы:
- синхронный двигатель
линейный двигатель
арматура
Индукционный двигатель
коммутатор
См. всю связанную информацию →
всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников, несущих ток, в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что в обмотках статора протекает набор из трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Викторина «Британника»
Энергия и ископаемое топливо
От ископаемого топлива и солнечной энергии до электрических чудес Томаса Эдисона и Николы Теслы — мир живет за счет энергии. Используйте свои природные ресурсы и проверьте свои знания об энергии в этой викторине.
Используйте свои природные ресурсы и проверьте свои знания об энергии в этой викторине.
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается.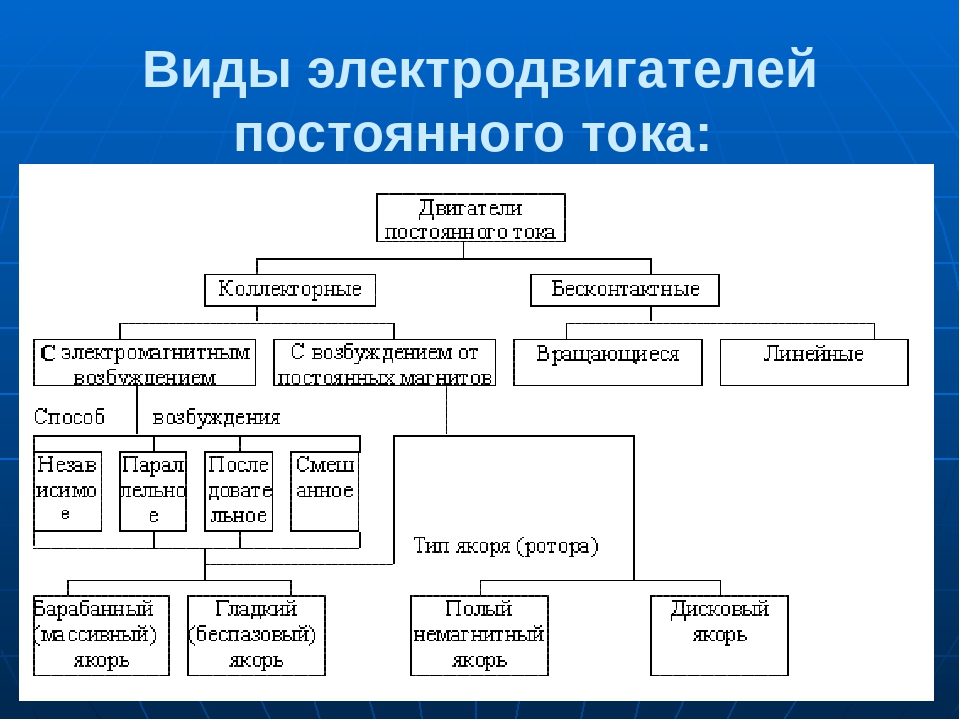 Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
Другие синхронные скорости можно получить с источником постоянной частоты, создав машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — число полюсов (которое должно быть четное число). Данную железную раму можно намотать для любого из нескольких возможных чисел пар полюсов, используя катушки, которые охватывают угол приблизительно (360/ р )°. Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — число полюсов (которое должно быть четное число). Данную железную раму можно намотать для любого из нескольких возможных чисел пар полюсов, используя катушки, которые охватывают угол приблизительно (360/ р )°. Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Что такое электродвигатель?
Электродвигатели представляют собой устройства, преобразующие электрическую энергию в механическую, обычно в форме вращательного движения.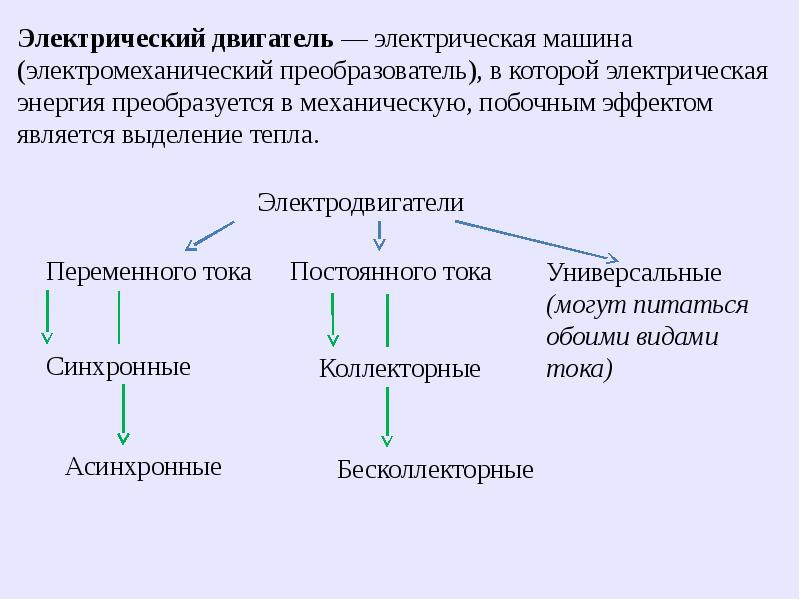 Проще говоря, это устройства, которые используют электроэнергию для выработки движущей силы.
Проще говоря, это устройства, которые используют электроэнергию для выработки движущей силы.
Электродвигатели не только обеспечивают простое и эффективное средство создания высокой выходной мощности привода, но их также легко уменьшить, что позволяет встраивать их в другие машины и оборудование. В результате они находят широкое применение как в промышленности, так и в повседневной жизни.
Принцип действия
Помнишь, тебя в школе учили правилу левой руки Флеминга? Электродвигатели являются применением этого правила, при этом сила, создаваемая электрическим током, протекающим через катушку в присутствии магнитного поля, заставляет вал двигателя вращаться.
На приведенной ниже диаграмме правило левой руки Флеминга говорит нам о том, что направленная вверх сила генерируется, когда ток течет перпендикулярно магнитному полю от магнита * .
*
Магнитное поле: Область, в которой присутствует магнитная сила (направленная от северного (N) к южному (S) полюсу магнита).

Как достигается вращение в электродвигателе
В случае щеточного электродвигателя постоянного тока *1 , например, эту силу можно использовать для поддержания непрерывного вращения путем изменения направления тока на каждом полуобороте катушки (что достигается с помощью щеток и коммутатора *2 )
*1
Двигатель постоянного тока: Двигатель, работающий от постоянного тока (DC)
*2
Щетки и коллектор: При совместном использовании они меняют направление тока каждый раз, когда вал двигателя делает пол-оборота.
История электродвигателей
Британский ученый Майкл Фарадей пользуется особым влиянием среди многих ученых 19 века, сыгравших определенную роль в изобретении и разработке электродвигателей. В 1821 году Фарадей провел успешный эксперимент, в котором вращение проволоки осуществлялось с помощью магнита вместе с магнитным полем, создаваемым электрическим током. В 1831 году он изобрел закон магнитной индукции, заложив основу для значительного прогресса в области электродвигателей и генераторов.
В 1831 году он изобрел закон магнитной индукции, заложив основу для значительного прогресса в области электродвигателей и генераторов.
Со временем было изобретено множество других типов электродвигателей, а также конструкции, которые можно считать архетипическими двигателями постоянного тока.
Впоследствии, в 1872 году, практический электродвигатель был не столько изобретен, сколько открыт, когда один из генераторов, выставленных на Всемирной выставке в Вене, начал вращаться сам по себе после того, как был случайно подключен к другому генератору. Это привело людей к пониманию того, что то, как работают генераторы, можно использовать и в двигателях. Последовавший за этим быстрый рост практического использования генераторов был таким, что они стали основой многих отраслей промышленности в 20 веке.
Двигатели и генераторы
В то время как электродвигатели преобразуют электрическую энергию во вращение и другие виды механической энергии, генераторы выполняют обратную функцию преобразования механической энергии в электрическую.
Несмотря на эти противоположные функции, двигатели и генераторы очень похожи по конструкции и принципу действия. Фактически, простой эксперимент, в котором два модельных двигателя соединяются вместе, — это все, что нужно, чтобы продемонстрировать, что электрический двигатель может также работать как генератор.
Естественно, учитывая различные способы их использования, два типа машин всегда разрабатывались отдельно.
Типы электродвигателей
Электродвигатели бывают самых разных форм в зависимости от типа используемого тока, конструкции их катушек (обмоток) и того, как они генерируют магнитное поле. Соответственно, их можно классифицировать по различным признакам.
Ниже описаны три типа электродвигателей, обычно используемых как в быту, так и в промышленности.
Двигатели постоянного тока
Это двигатели, приводимые в действие источником постоянного тока. Они подразделяются на щеточные и бесщеточные (BLDC) двигатели в зависимости от того, используют ли они щетки *1 .
В то время как коллекторным двигателям постоянного тока для работы требуется только подключение к источнику питания постоянного тока, бесщеточным двигателям постоянного тока требуется датчик для определения ориентации магнитных полюсов ротора *2 и схема привода для подачи соответствующего тока.
*1
Щетка: Деталь, используемая вместе с коллектором.
*2
Ротор: часть двигателя, которая вращается. Вал двигателя является частью ротора.
Двигатели переменного тока
Это двигатели, приводимые в действие источником переменного тока. Они сгруппированы в зависимости от того, является ли источник питания однофазным *1 или трехфазным *2 .
Однофазные двигатели далее сгруппированы в конденсаторные двигатели, в которых используется конденсатор *3 для создания крутящего момента, и двигатели с экранированными полюсами, которые имеют дополнительную катушку (обмотку), называемую экранирующей катушкой *4 .
*1
Однофазный: Обычный источник питания переменного тока, обычно доступный в домах.
*2
Трехфазный: тип источника питания переменного тока, используемый в основном в промышленности.
*3
Конденсатор: электронный компонент, хранящий электрическую энергию.
*4
Затеняющая катушка: катушка с замкнутой цепью, намотанная вокруг части сердечника статора.
Шаговые двигатели
Это двигатели, которые вращаются на фиксированный шаг (угол) каждый раз, когда вводится импульс *1 .
Шаговые двигатели можно сгруппировать по структуре их ротора. Двигатели с постоянными магнитами (PM) *2 имеют магнит в роторе *3 , двигатели с переменным сопротивлением (VR) *4 имеют железный сердечник, а гибридные двигатели имеют и то, и другое.
*1
Импульс: Короткий всплеск электричества, производимый включением и выключением источника питания.
*2
Ротор: часть двигателя, которая вращается. Вал двигателя является частью ротора.
*3
Двигатель с постоянными магнитами: Двигатель с постоянным магнитом
.
*4
Двигатель
VR: двигатель с переменным магнитным сопротивлением, в котором сердечники расположены подобно зубьям шестерни, при этом такое расположение определяет угол шага.

Обзор типов электродвигателей
В таблице ниже перечислены основные характеристики трех различных типов двигателей.
В дополнение к перечисленным выше существует множество других типов электродвигателей.
| Тип | Характеристики |
|---|---|
| Линейный двигатель | Двигатель, скользящий в линейном направлении |
| Ультразвуковой двигатель | Двигатель, приводимый в движение ультразвуковыми колебаниями |
| Двигатель без сердечника | Коллекторный двигатель постоянного тока с ротором без железного сердечника или бесщеточный двигатель со статором без железного сердечника |
| Универсальный двигатель | Двигатель с фазным ротором и статором, работающий как на переменном, так и на постоянном токе |
| Двигатель с гистерезисом | Двигатель переменного тока, в роторе которого используется материал, обладающий гистерезисом и вращающийся за счет гистерезисного крутящего момента |
| Двигатель SR | Шаговый двигатель VR, который также имеет функцию определения положения ротора, что позволяет избежать потери синхронизации |
Применение в двигателях
Хотя электродвигатели используются по-разному, ниже перечислены общие области применения бесщеточных двигателей постоянного тока и шаговых двигателей, поставляемых ASPINA.
Области применения бесщеточных двигателей постоянного тока
Благодаря небольшим размерам, высокой мощности, низкому уровню шума и вибрации, а также длительному сроку службы бесщеточные двигатели постоянного тока находят широкое применение в таких приложениях, как системы вентиляции (очистители воздуха и другие виды кондиционер), бытовая техника, холодильники, водонагреватели, торговые автоматы, копировальные аппараты, принтеры, проекторы, оргтехника, контрольно-измерительные приборы, транспортные средства и медицинские приборы.
- Кондиционеры
- Финансовые терминалы (банкоматы), разменные автоматы, автоматы по обмену валюты, автоматы по продаже билетов
- Бытовая техника
- Чистые помещения
- Водонагреватели и горелки
- Оптические изделия
- Торговые автоматы
- Принтеры
- Морозильные и холодильные витрины
- Копировальные аппараты
- Медицинское оборудование
- Офисное оборудование
- Системы лабораторного анализа
Области применения шаговых двигателей
Превосходная точность остановки, высокий крутящий момент на средних и низких скоростях и превосходная чувствительность шаговых двигателей означают, что они могут использоваться в самых разных приводных устройствах, требующих точного управления.
- Производственное оборудование
- Приводы оптических дисков (приводы Blu-ray, DVD и т. д.)
- Медицинское оборудование
- Лазерные принтеры
- Лабораторные аналитические приборы
- Цифровые камеры
- Банкоматы
- Жалюзи кондиционера
- Торговые автоматы
- Развлекательные автоматы
- Автоматы по продаже билетов
- Копировальные аппараты
- Роботы
Решение проблем с электродвигателями
ASPINA поставляет не только автономные шаговые двигатели, но и системные продукты, включающие системы привода и управления, а также механические конструкции. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым в различных отраслях промышленности, областях применения и потребительских продуктах, а также для ваших конкретных производственных схем.