Содержание
Как подключить шаговый двигатель без контроллера
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель , который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Как работает шаговый двигатель?
- Драйверы и контроллеры шагового двигателя
- Как запустить шаговый двигатель без драйвера
- Как подключить шаговый двигатель без контроллера
- Как запустить шаговый двигатель?
- Контроллер шагового двигателя
- Советы для начинающих. Arduino и шаговый двигатель Nema 17
- Главное меню
- Программируемый контроллер шаговых двигателей SMSD-4.2
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Лазерный гравер своими руками из DvD приводов laser engraver
 youtube.com/embed/y4WdOPGjXUE» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/y4WdOPGjXUE» frameborder=»0″ allowfullscreen=»»/>
Как работает шаговый двигатель?
Шаговый двигатель — это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Так, пожалуй, можно дать строгое определение. Наверное, каждый видел, как выглядит шаговый двигатель внешне: он практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов рис.
Внешний вид шаговых двигателей семейства ДШИ Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми. Чем же хорош шаговый двигатель?
Но не все так хорошо Что выбрать? Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель — дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество.
Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей. Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи.
Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки.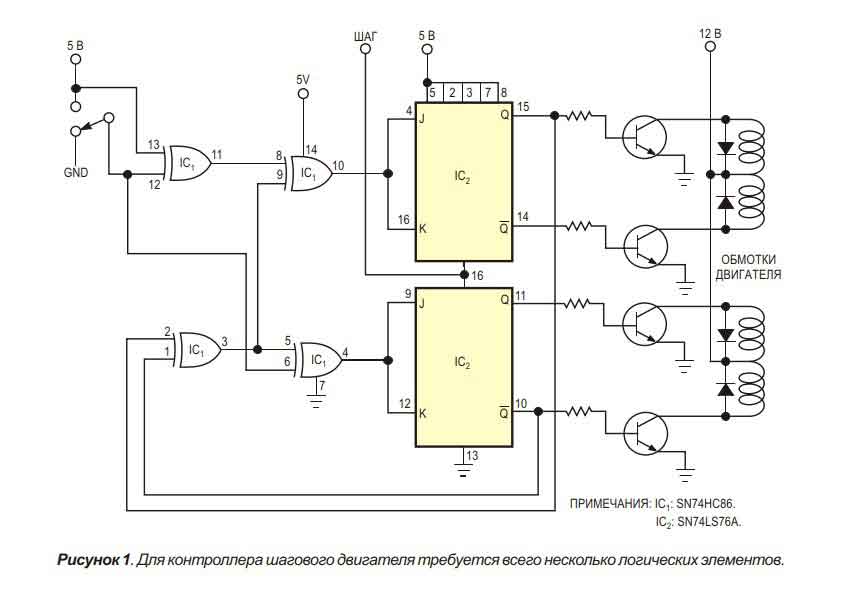
Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка. При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем.
Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением.
Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у котрых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях.
К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора.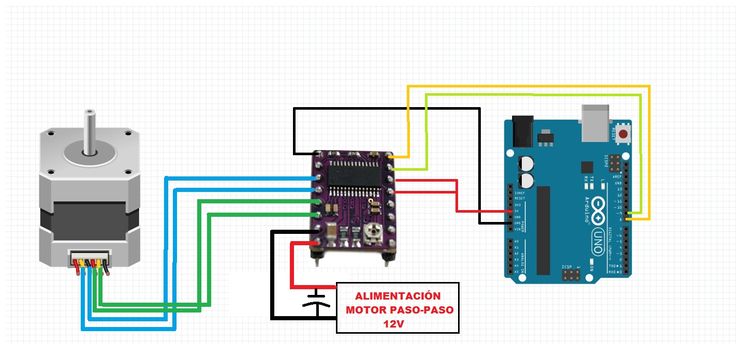 Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто.
Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто.
В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент.
Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы. Виды шаговых двигателей. Существуют три основных типа шаговых двигателей:.
Виды шаговых двигателей. Существуют три основных типа шаговых двигателей:.
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами или гибридного чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три реже четыре обмотки с одним общим выводом.
Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов.
Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов.
Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков.
Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания.
После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. Двигатели с переменным магнитным сопротивлением. Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала рис.
Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имет шаг 30 град. Двигатель с переменным магнитным сопротивлением. При включени тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, то есть зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка.
Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках.
Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот.
Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов.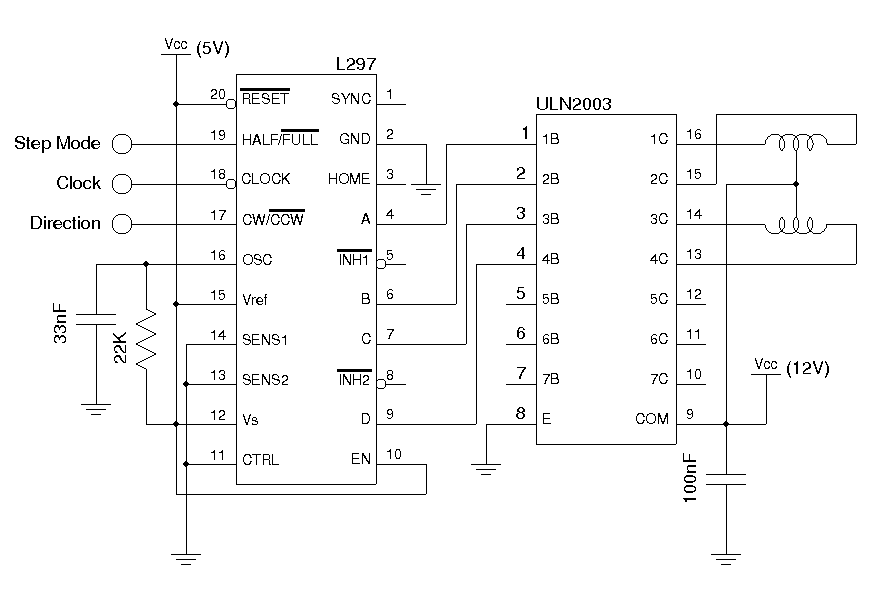 Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях. Двигатели с постоянными магнитами. Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты рис.
Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях. Двигатели с постоянными магнитами. Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты рис.
Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Двигатель с постоянными магнитами. Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град.
При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга.
Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 — 24 шага на оборот угол шага 7.
Разрез реального шагового двигателя с постоянными магнитами показан на рис. Разрез шагового двигателя с постоянными магнитами.
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит. Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, котрая ограничивает максимальную скорость.
Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением. Гибридные двигатели.
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от до угол шага 3. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Типичное число шагов на оборот для гибридных двигателей составляет от до угол шага 3. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении рис. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов.
Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.
Драйверы и контроллеры шагового двигателя
Мы принимаем формат Sprint-Layout 6! Экспорт в Gerber из Sprint-Layout 6. Попробуйте вот по такой схеме, только ёмкость конденсатора придётся подобрать под конкретный двигатель. Конденсаторы Panasonic. Часть 4.
Схема контроллера униполярного шагового двигателя на MOSFET How do you charge your phone wherever you are without electricity (% Effective . собранного на микросхеме A и подключение его к ардуино драйвер на.
Как запустить шаговый двигатель без драйвера
Шаговый двигатель используется в машинах для точного перемещения. Наладим управление шаговым двигателем через USB с компьютера своими. Драйвер двигателей своими руками. Для непосредственного управления маломощными электродвигателями можно использовать. Наладим управление шаговым двигателем через USB с компьютера своими руками. Нам потребуется: 1 Шаговый двигатель, возьмем — Nema23 76 мм, вместо него может быть другой, управлять будем биполяным методом, любой. Управление биполярным шаговым двигателем. Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью.
Управление биполярным шаговым двигателем. Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью.
Как подключить шаговый двигатель без контроллера
Управление шаговым двигателем выполняется в пошаговом или саморазгонном режиме. Диапазон регулировки максимального выходного тока, А — от 3 до 6; 2. Режим работы: саморазгонный; пошаговый. Масса — не более 0,3 кг.
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение прошивка для него. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности.
Как запустить шаговый двигатель?
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора. Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления.
Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления.
Контроллер шагового двигателя
Замена подушки двигателя Ауди А6 С5 — пошаговая инструкция Опоры мотора, еще именуемые подушками, защищают элементы мотора от повреждения, на протяжении движения автомобиля. Главное предназначение опор мотора — защищать его от тряски и толчков в свое время езды по неровной поверхности. Естественно, продляется срок службы мотора, а езда в автомобил. CD румы бывают разные и моторы в них тоже. У многих имеются двигатели от жёстких дисков и все задавались вопросом как же его подключить? Большинство ошибочно думают, что в жёстких дисках применяются шаговые двигатели, но это не так. Принцип работы и управление шаговым двигателем с и без Также для контроля работы устройства используется драйвер шагового двигателя. Техногенный Апокалипсис начинается с выбора правильного шагового двигателя Всё просто, понятно и доступн
Как правильно подключить и запустить на ардуино шаговый двигатель от Но без контроллера все равно не обойтись (вариант с мультивибратором.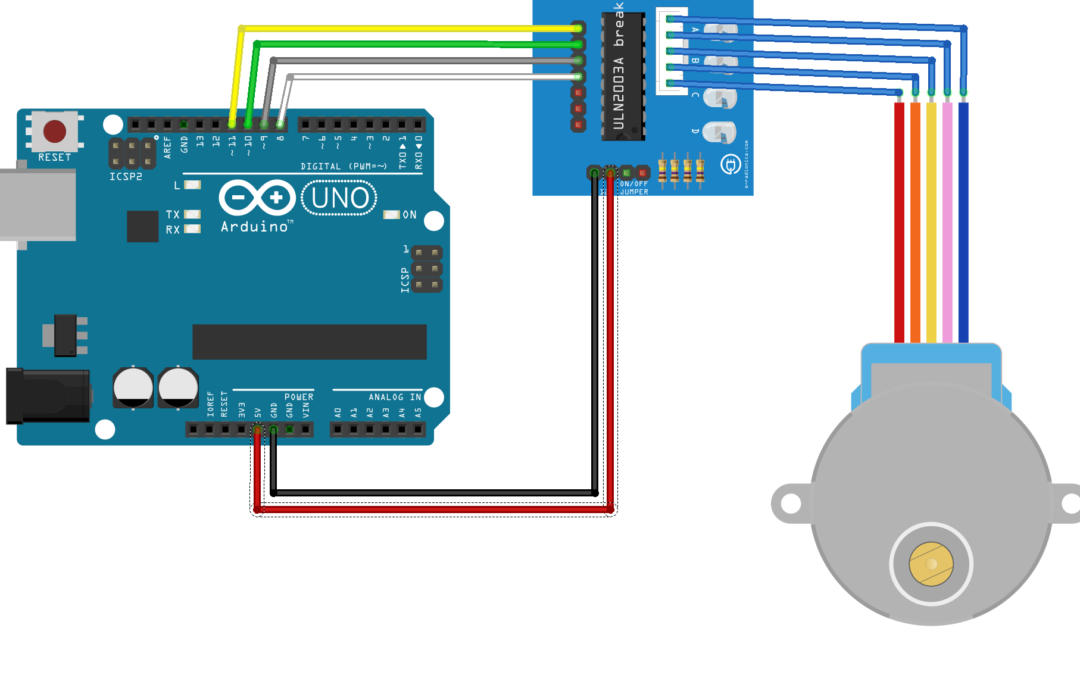
Советы для начинающих. Arduino и шаговый двигатель Nema 17
Шаговые двигатели применяются сегодня во многих промышленных сферах. Двигатели данного типа отличаются тем, что позволяют добиться высокой точности позиционирования рабочего органа, по сравнению с другими типами двигателей. Очевидно, что для работы шагового двигателя требуется точное автоматическое управление.
Главное меню
ВИДЕО ПО ТЕМЕ: Что можно извлечь из CD/DVD привода(для поделок) 2014
Шаговый двигатель — это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Так, пожалуй, можно дать строгое определение. Наверное, каждый видел, как выглядит шаговый двигатель внешне: он практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов рис. Внешний вид шаговых двигателей семейства ДШИ
Внешний вид шаговых двигателей семейства ДШИ
Хабр Geektimes Тостер Мой круг Фрилансим. Есть у меня несколько двигателей от жестких дисков.
Программируемый контроллер шаговых двигателей SMSD-4.2
Форум Список пользователей Все разделы прочитаны Справка Расширенный поиск. Форум Оборудование Подбор Оборудования Подбор оборудования для шагового двигателя. Страница 1 из 5 1 2 Последняя К странице: Показано с 1 по 10 из Тема: Подбор оборудования для шагового двигателя. Дмитрий Просмотр профиля Сообщения форума Личное сообщение Просмотр статей.
Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое. На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов. Вот технологии быстро растут.
Запуск шагового двигателя без электроники
Главная » Радиосхемы » Автоматика
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель, который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Но оказывается что данное мнение является ошибочным. Шаговый двигатель от принтера или от другого устрой устройства, можно легко запустить от переменного тока.
Для эксперимента использовался вот такой шаговый двигатель:
Обычно у них четыре вывода и две обмотки, в большинстве случаев, но есть и другие конечно.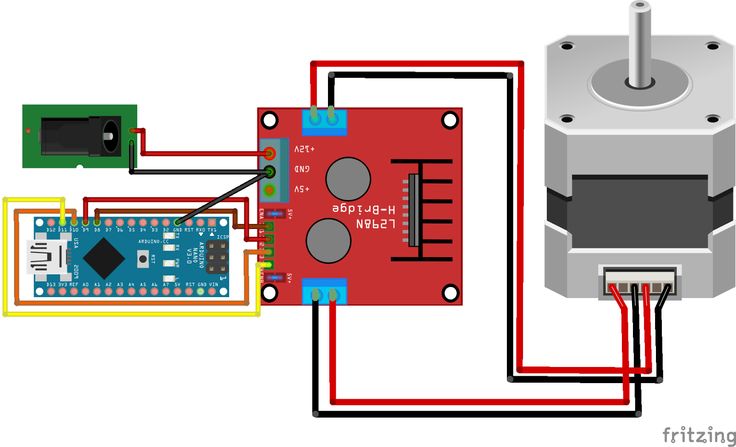 В данном случае будет рассмотрен самый ходовой двигатель.
В данном случае будет рассмотрен самый ходовой двигатель.
Схема шагового двигателя
Схема обмоток данного двигателя выглядит вот так:
Она очень похожа на схему обычного асинхронного двигателя.
Для запуска двигателя понадобится:
- Электролитический конденсатор 470-3300 мкФ.
- Источник переменного тока 12 Вольт.
Замыкаем обмотки последовательно, как на схеме ниже.
Середину проводов нужно скрутить и спаять.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом к источнику питания на любой контакт. Фактически электролитический конденсатор будет параллелен одной из обмоток.
Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все достаточно просто. Принцип работы этой схемы очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Единственные минус заключается в том, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Автор публикации
Рейтинг
( 4 оценки, среднее 4 из 5 )
0
16 375 просмотров
двигатели электроника
Источник
Понравилась статья? Поделиться с друзьями:
Основы шагового двигателя
Каждый двигатель преобразует энергию. Электродвигатели преобразуют электричество в движение. Шаговые двигатели преобразуют электричество во вращение. Шаговый двигатель не только преобразует электрическую энергию во вращение, но и может очень точно контролировать, насколько далеко он будет вращаться и как быстро.
Электродвигатели преобразуют электричество в движение. Шаговые двигатели преобразуют электричество во вращение. Шаговый двигатель не только преобразует электрическую энергию во вращение, но и может очень точно контролировать, насколько далеко он будет вращаться и как быстро.
Шаговые двигатели названы так потому, что каждый импульс электричества поворачивает двигатель на один шаг. Шаговые двигатели управляются драйвером, который посылает импульсы в двигатель, заставляя его вращаться. Количество импульсов, которые вращает двигатель, равно количеству импульсов, подаваемых на драйвер. Двигатель будет вращаться со скоростью, равной частоте тех самых импульсов.
Шаговые двигатели очень просты в управлении. Большинство драйверов ищут 5-вольтовые импульсы, которые являются уровнем напряжения большинства интегральных схем. Вам просто нужно разработать схему для вывода импульсов или использовать один из импульсных генераторов ORIENTAL MOTOR.
Одной из наиболее замечательных особенностей шаговых двигателей является их способность очень точного позиционирования. Это будет подробно рассмотрено позже. Шаговые двигатели не идеальны, всегда есть небольшие неточности. Стандартные шаговые двигатели ORIENTAL MOTOR имеют точность ± 3 угловых минуты (0,05°). Однако замечательной особенностью шаговых двигателей является то, что эта ошибка не накапливается от шага к шагу. Когда стандартный шаговый двигатель проходит один шаг, он будет двигаться на 1,8° ± 0,05°. Если тот же мотор пройдет миллион шагов, он пройдет 1 800 000° ± 0,05°. Ошибка не накапливается.
Это будет подробно рассмотрено позже. Шаговые двигатели не идеальны, всегда есть небольшие неточности. Стандартные шаговые двигатели ORIENTAL MOTOR имеют точность ± 3 угловых минуты (0,05°). Однако замечательной особенностью шаговых двигателей является то, что эта ошибка не накапливается от шага к шагу. Когда стандартный шаговый двигатель проходит один шаг, он будет двигаться на 1,8° ± 0,05°. Если тот же мотор пройдет миллион шагов, он пройдет 1 800 000° ± 0,05°. Ошибка не накапливается.
Шаговые двигатели могут быстро реагировать и ускоряться. У них низкая инерция ротора, поэтому они могут быстро набирать скорость. По этой причине шаговые двигатели идеально подходят для коротких и быстрых перемещений.
Система шагового двигателя
На приведенной ниже схеме показана типичная система на основе шагового двигателя. Все эти части должны присутствовать в той или иной форме. Производительность каждого компонента будет влиять на другие.
Первым компонентом является компьютер или ПЛК. Это мозг системы. Компьютер не только управляет системой шагового двигателя, но и остальной частью машины. Он может поднимать лифт или продвигать конвейер. Он может быть как сложным, как ПК или ПЛК, так и простым, как кнопка оператора.
Это мозг системы. Компьютер не только управляет системой шагового двигателя, но и остальной частью машины. Он может поднимать лифт или продвигать конвейер. Он может быть как сложным, как ПК или ПЛК, так и простым, как кнопка оператора.
Вторая часть — индексатор или карта ПЛК. Это говорит шаговому двигателю, что делать. Он выдаст правильное количество импульсов, которое двигатель будет перемещать, и изменяет частоту, чтобы двигатель ускорялся, работал на скорости, а затем замедлялся.
Это может быть отдельный компонент, например индексатор ORIENTAL MOTOR SG8030 или плата генератора импульсов, которая вставляется в ПЛК. Форма нематериальна, но она должна присутствовать, чтобы двигатель двигался.
Следующие четыре блока составляют драйвер двигателя. Логика фазового управления принимает импульсы от индексатора и определяет, какая фаза двигателя должна быть включена. Фазы должны быть под напряжением в определенной последовательности, и логика управления фазами позаботится об этом. Источник питания логики представляет собой низкоуровневый источник питания, который питает ИС в драйвере. Это зависит от набора микросхем или дизайна приложения, но большинство источников питания логики находятся в диапазоне 5 вольт. Источник питания двигателя — это напряжение питания для питания двигателя. Этот уровень напряжения обычно находится в диапазоне 24 В постоянного тока, но может быть намного выше. Наконец, усилитель мощности представляет собой набор транзисторов, который позволяет току питать фазы. Они постоянно включаются и выключаются, чтобы двигатель работал в правильной последовательности.
Источник питания логики представляет собой низкоуровневый источник питания, который питает ИС в драйвере. Это зависит от набора микросхем или дизайна приложения, но большинство источников питания логики находятся в диапазоне 5 вольт. Источник питания двигателя — это напряжение питания для питания двигателя. Этот уровень напряжения обычно находится в диапазоне 24 В постоянного тока, но может быть намного выше. Наконец, усилитель мощности представляет собой набор транзисторов, который позволяет току питать фазы. Они постоянно включаются и выключаются, чтобы двигатель работал в правильной последовательности.
Все эти компоненты дают команду двигателю перемещать нагрузку. Нагрузкой может быть ходовой винт, диск или конвейер.
Типы шаговых двигателей
В настоящее время существует три основных типа шаговых двигателей.
- Переменное сопротивление (VR)
- Постоянный магнит (ПМ)
- Гибрид
ORIENTAL MOTOR производит только гибридные шаговые двигатели.
Шаговые двигатели с переменным сопротивлением имеют зубья на роторе и статоре, но не имеют магнита. Поэтому он не имеет фиксирующего момента. Постоянный магнит имеет магнит для ротора, но не имеет зубцов. Обычно магнит PM имеет грубые углы шага, но у него есть фиксирующий крутящий момент.
Гибридные шаговые двигатели сочетают в себе магнит от постоянного магнита и зубья от двигателей с переменным сопротивлением. Магнит намагничен в осевом направлении, что означает, что на диаграмме справа верхняя половина представляет собой северный полюс, а нижняя половина — южный полюс. На магните две зубчатые чашки ротора с 50 зубьями. Две чашки смещены на 3,6°, так что если мы посмотрим вниз на ротор между двумя зубцами на чашке северного полюса, мы увидим один зубец на чашке южного полюса прямо посередине.
Эти двигатели имеют двухфазную конструкцию с 4 полюсами на фазу. Полюса, отстоящие друг от друга на 90°, составляют каждую фазу. Каждая фаза намотана так, что полюса на 180° имеют одинаковую полярность, а полюса на 90° — противоположную полярность. Если бы ток в этой фазе был изменен на противоположный, то изменилась бы и полярность. Это означает, что мы можем сделать любой полюс статора либо северным, либо южным полюсом.
Если бы ток в этой фазе был изменен на противоположный, то изменилась бы и полярность. Это означает, что мы можем сделать любой полюс статора либо северным, либо южным полюсом.
На роторе 50 зубьев. Шаг между зубьями составляет 7,2°. При движении двигателя некоторые зубья ротора смещаются с зубьями статора на 3/4 шага зубьев, 1/2 шага зубьев и 1/4 шага зубьев. Когда двигатель шагает, он выбирает самый простой маршрут, поскольку 1/4 от 7,2° составляет 1,8°, двигатель перемещается на 1,8° каждый шаг.
Наконец, крутящий момент и точность зависят от количества полюсов (зубьев). Чем больше полюсов, тем лучше крутящий момент и точность. ORIENTAL MOTOR предлагает шаговые двигатели высокого разрешения. Шаг зубьев этих двигателей вдвое меньше, чем у нашего стандартного двигателя. Ротор имеет 100 зубьев, поэтому угол между зубьями составляет 3,6°. Когда двигатель перемещается на 1/4 шага зуба, он перемещается на 0,9°. Разрешение наших моделей с высоким разрешением в два раза больше, чем у стандартных моделей: 400 шагов на оборот против 200 шагов на оборот.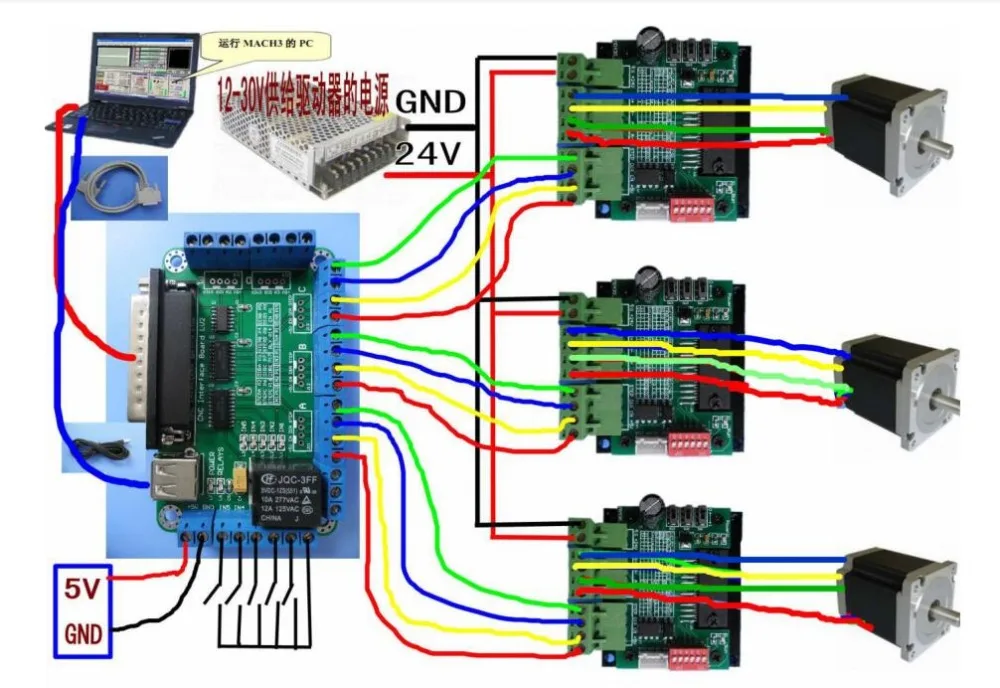
Меньшие углы шага означают меньшую вибрацию, поскольку мы не делаем так далеко с каждым шагом.
Структура
На рисунке ниже показано поперечное сечение 5-фазного шагового двигателя. Шаговый двигатель состоит в основном из двух частей: статора и ротора. Ротор, в свою очередь, состоит из трех компонентов: стакана ротора 1, стакана ротора 2 и постоянного магнита. Ротор намагничен в осевом направлении, так что, например, если чашка ротора 1 поляризована на север, чашка ротора 2 будет поляризована на юг.
Статор имеет 10 магнитных полюсов с маленькими зубьями, каждый полюс снабжен обмоткой.
Каждая обмотка соединена с обмоткой противоположного полюса, так что оба полюса намагничиваются с одинаковой полярностью, когда ток проходит через пару обмоток. (Пропускание тока через данную обмотку намагничивает противоположную пару полюсов той же полярности, то есть северной или южной.)
Противоположная пара полюсов составляет одну фазу. Поскольку имеется 10 магнитных полюсов, или пять фаз, в этом конкретном двигателе называется 5-фазным шаговым двигателем.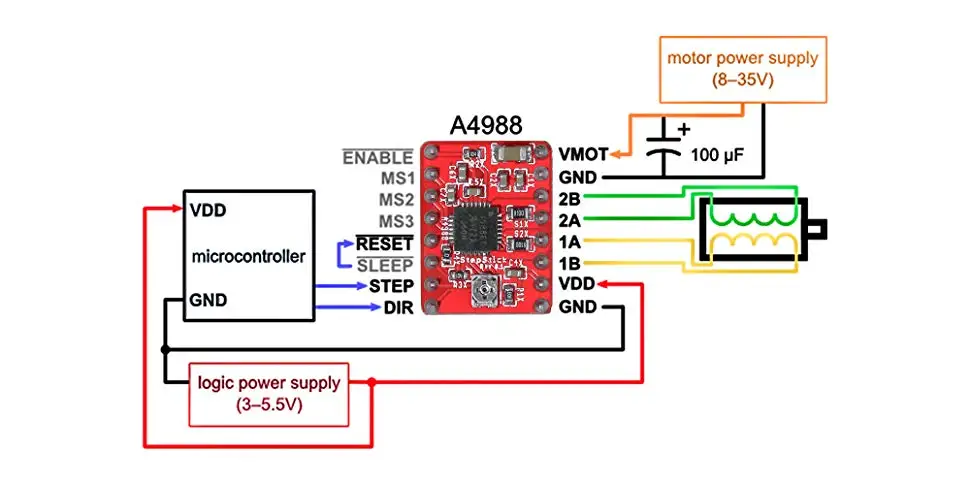
По внешнему периметру каждого ротора имеется 50 зубьев, при этом зубья чашки ротора 1 и чашки ротора 2 механически смещены друг относительно друга на половину шага зубьев.
Скорость-момент
Очень важно, чтобы вы знали, как читать кривую скорость-момент, так как она скажет нам, что двигатель может и не может делать. Кривые скорость-момент представляют данный двигатель и данный привод. Когда двигатель работает, его крутящий момент зависит от типа привода и напряжения. Один и тот же двигатель может иметь очень разную кривую скорости вращения при использовании с другим приводом.
ORIENTAL MOTOR приводит кривые скорость-момент для справки. Если двигатель используется с аналогичным приводом, с аналогичным напряжением и током, вы должны получить аналогичные характеристики. См. приведенную ниже интерактивную кривую скорость-момент:
Чтение кривой скорость-момент
- Удерживающий момент
Величина крутящего момента, создаваемого двигателем в состоянии покоя, когда через его обмотки протекает номинальный ток.
- Пуск/Стоп Область
Значения, при которых двигатель может мгновенно запускаться, останавливаться или реверсировать. - Момент втягивания
Значения крутящего момента и скорости, которые двигатель может запускать, останавливать или реверсировать синхронно с входными импульсами. - Момент вытягивания
Значения крутящего момента и скорости, при которых двигатель может работать синхронно с входными фазами. Максимальные значения, которые двигатель может обеспечить без остановки. - Максимальная начальная скорость
Максимальная скорость, с которой двигатель может запуститься, измеренная без нагрузки. - Максимальная рабочая скорость
Максимальная скорость вращения двигателя, измеренная без нагрузки.
In order to operate in the region between the pull-in и вытягивании, двигатель должен сначала запуститься в зоне пуска/останова. Затем частота пульса увеличивается до тех пор, пока не будет достигнута желаемая скорость. Для остановки скорость двигателя снижается до тех пор, пока она не станет ниже кривой крутящего момента.
Затем частота пульса увеличивается до тех пор, пока не будет достигнута желаемая скорость. Для остановки скорость двигателя снижается до тех пор, пока она не станет ниже кривой крутящего момента.
Крутящий момент пропорционален току и количеству витков провода. Если мы хотим увеличить крутящий момент на 20%, мы должны увеличить ток примерно на 20%. Точно так же, если мы хотим уменьшить крутящий момент на 50%, уменьшим ток на 50%.
Из-за магнитного насыщения нет смысла увеличивать ток более чем в 2 раза от номинального. В этот момент увеличение тока не увеличит крутящий момент. При токе, примерно в 10 раз превышающем номинальный, вы рискуете размагнитить ротор.
Все наши двигатели имеют изоляцию класса B и могут выдерживать температуру 130°C до разрушения изоляции. Если мы допускаем разницу температур внутри и снаружи в 30°, температура корпуса не должна превышать 100°C.
Индуктивность влияет на крутящий момент на высоких скоростях. Индуктивность является причиной того, что двигатели не имеют высокой степени крутящего момента до бесконечности. Каждая обмотка двигателя имеет определенное значение индуктивности и сопротивления. Индуктивность в генри, деленная на сопротивление в омах, дает нам значение секунд. Это количество секунд (постоянная времени) представляет собой количество времени, которое требуется катушке для зарядки до 63% от ее номинального значения. Если двигатель рассчитан на 1 ампер, через 1 постоянную времени катушка будет на 0,63 ампер. После примерно 4 или 5 постоянных времени катушка будет до 1 ампер. Поскольку крутящий момент пропорционален току, если ток заряжается только до 63%, двигатель будет иметь только около 63% своего крутящего момента после 1 постоянной времени.
Каждая обмотка двигателя имеет определенное значение индуктивности и сопротивления. Индуктивность в генри, деленная на сопротивление в омах, дает нам значение секунд. Это количество секунд (постоянная времени) представляет собой количество времени, которое требуется катушке для зарядки до 63% от ее номинального значения. Если двигатель рассчитан на 1 ампер, через 1 постоянную времени катушка будет на 0,63 ампер. После примерно 4 или 5 постоянных времени катушка будет до 1 ампер. Поскольку крутящий момент пропорционален току, если ток заряжается только до 63%, двигатель будет иметь только около 63% своего крутящего момента после 1 постоянной времени.
На низких скоростях это не проблема. Ток может входить и выходить из катушек достаточно быстро, поэтому двигатель имеет номинальный крутящий момент. Однако на высоких скоростях ток не может пройти достаточно быстро, пока не переключится следующая фаза. Крутящий момент уменьшается.
Напряжение драйвера играет большую роль в быстродействии.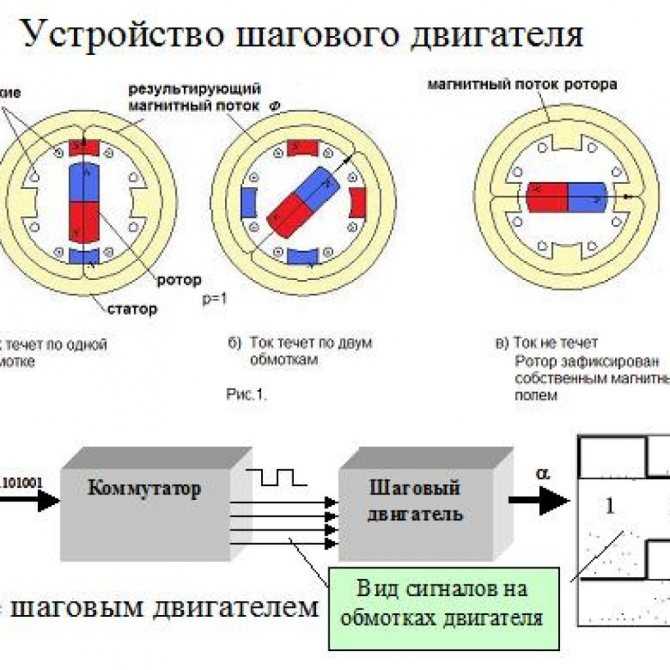 Чем выше отношение напряжения привода к напряжению двигателя, тем лучше производительность на высоких скоростях. Высокие напряжения вызывают ток в обмотках с большей скоростью, чем 63%, упомянутые выше.
Чем выше отношение напряжения привода к напряжению двигателя, тем лучше производительность на высоких скоростях. Высокие напряжения вызывают ток в обмотках с большей скоростью, чем 63%, упомянутые выше.
Вибрация
Когда шаговый двигатель совершает переход от одного шага к другому, ротор не останавливается мгновенно. ротор фактически проходит конечное положение, оттягивается назад, проходит конечное положение в противоположном направлении и продолжает двигаться вперед и назад, пока, наконец, не остановится (см. интерактивную диаграмму ниже). Мы называем это «звоном», и он возникает при каждом шаге двигателя. Подобно шнуру для банджи, импульс переносит ротор за точку его остановки, затем он «подпрыгивает» вперед и назад, пока, наконец, не остановится. Однако в большинстве случаев двигатель получает команду перейти к следующему шагу, прежде чем он остановится.
На приведенных ниже графиках показан звон при различных условиях нагрузки. Без нагрузки двигатель сильно стучит.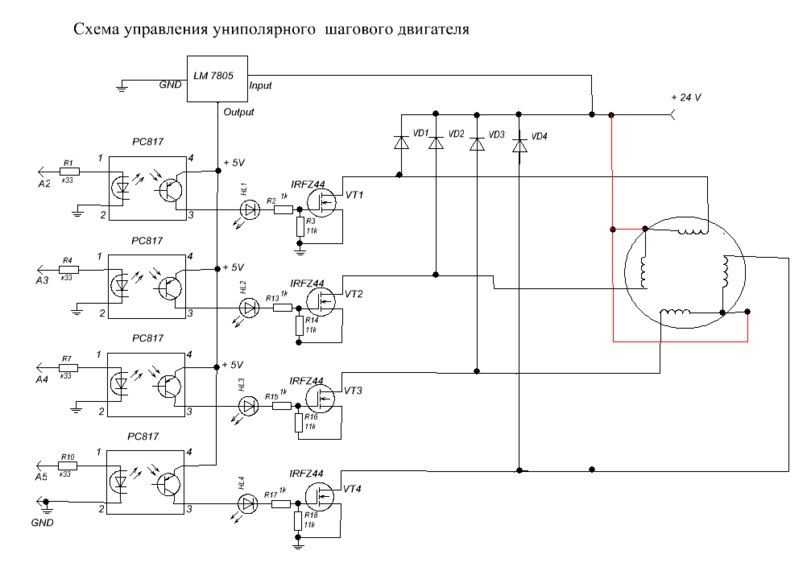 Много звонка означает много вибрации. Двигатель часто глохнет, если он не нагружен или слегка нагружен, потому что вибрация настолько высока, что теряется синхронность. При тестировании шагового двигателя обязательно добавляйте нагрузку.
Много звонка означает много вибрации. Двигатель часто глохнет, если он не нагружен или слегка нагружен, потому что вибрация настолько высока, что теряется синхронность. При тестировании шагового двигателя обязательно добавляйте нагрузку.
На двух других графиках показан двигатель с нагрузкой. Правильная загрузка двигателя сгладит его работу. Нагрузка должна составлять от 30% до 70% крутящего момента, который может создать двигатель, а отношение инерции нагрузки к инерции ротора должно составлять от 1:1 до 10:1. Для более коротких и быстрых движений соотношение должно быть ближе к 1:1–3:1.
Специалист по применению ORIENTAL MOTOR и инженеры могут помочь в выборе правильного размера.
Двигатель будет демонстрировать гораздо более сильные вибрации, если частота входных импульсов соответствует собственной частоте двигателя. Это называется резонансом и обычно происходит на частоте около 200 Гц. В резонансе превышение и недорегулирование становятся намного больше, и вероятность пропуска шагов намного выше. Резонанс меняется в зависимости от инерции нагрузки, но обычно он составляет около 200 Гц.
Резонанс меняется в зависимости от инерции нагрузки, но обычно он составляет около 200 Гц.
2-фазные шаговые двигатели могут пропускать шаги только группами по четыре. Если вы пропускаете шаги, кратные четырем, вибрация вызывает потерю синхронизма или нагрузка слишком велика. Если количество пропущенных шагов не кратно четырем, велика вероятность того, что проблемы вызваны неправильным количеством импульсов или электрическими помехами.
Есть несколько способов обойти резонанс. Самый простой способ — вообще избежать такой скорости. 200 Гц — это не очень быстро для двухфазного двигателя со скоростью 60 об/мин. Большинство двигателей имеют максимальную начальную скорость около 1000 импульсов в секунду или около того. Таким образом, в большинстве случаев вы можете запустить двигатель на более высокой скорости, чем резонансная скорость.
Если вам нужно начать со скорости ниже резонансной скорости, быстро ускорьтесь через резонансный диапазон.
Другим решением является уменьшение угла шага.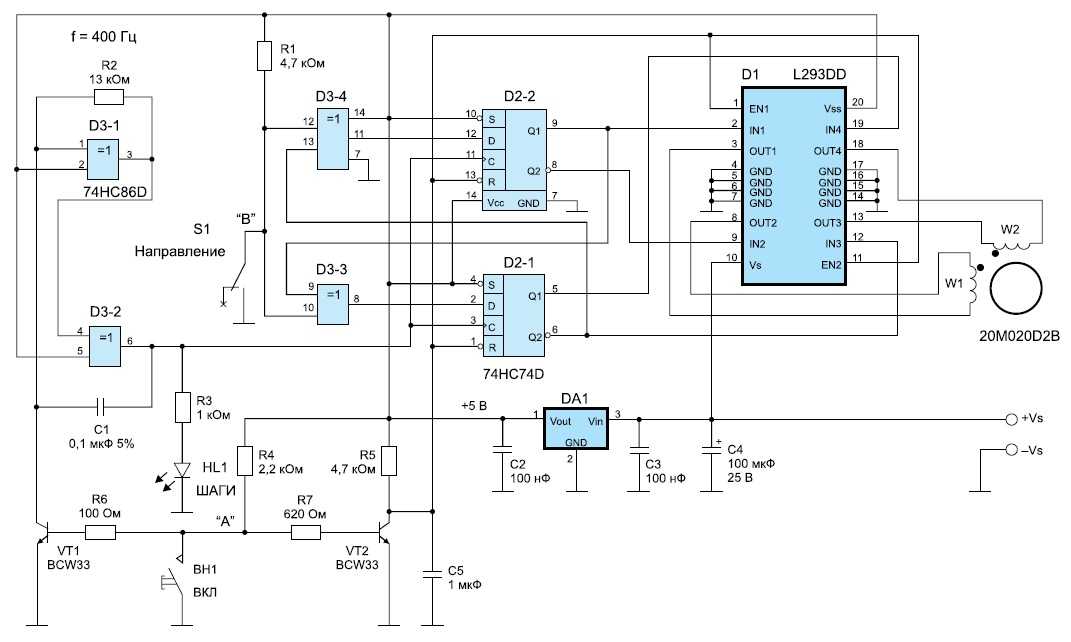 Двигатель всегда будет промахиваться и промахиваться больше для больших углов шага. Если двигателю не нужно далеко перемещаться, он не создаст достаточной силы (крутящего момента), чтобы выйти за пределы допустимого диапазона. Каждый раз, когда угол шага уменьшается, мотор не будет так сильно вибрировать. Вот почему полушаговые и микрошаговые системы так эффективно снижают вибрацию.
Двигатель всегда будет промахиваться и промахиваться больше для больших углов шага. Если двигателю не нужно далеко перемещаться, он не создаст достаточной силы (крутящего момента), чтобы выйти за пределы допустимого диапазона. Каждый раз, когда угол шага уменьшается, мотор не будет так сильно вибрировать. Вот почему полушаговые и микрошаговые системы так эффективно снижают вибрацию.
Убедитесь, что мощность двигателя соответствует нагрузке. Выбрав правильный двигатель, вы можете улучшить производительность.
Также доступны демпферы. Демпферы устанавливаются на задний вал двигателя и поглощают часть энергии колебаний. Они часто сглаживают вибрирующий двигатель недорого.
5-фазные шаговые двигатели
Относительно новая технология шаговых двигателей — 5-фазные. Наиболее очевидная разница между 2-фазным и 5-фазным (см. интерактивную схему ниже) заключается в количестве полюсов статора. В то время как двухфазные двигатели имеют 8 полюсов, по 4 на фазу, пятифазный двигатель имеет 10 полюсов, по 2 на фазу. Ротор такой же, как у двухфазного двигателя.
Ротор такой же, как у двухфазного двигателя.
В то время как двухфазный двигатель перемещается на 1/4 шага зубьев каждую фазу. 5-фазный из-за своей конструкции перемещается на 1/10 шага зуба. Поскольку шаг по-прежнему составляет 7,2°, угол шага составляет 0,72°. Просто исходя из конструкции, разрешение 5-фазного датчика составляет 500 шагов на оборот, а двухфазного — 200 шагов на оборот. Пятифазный предлагает разрешение в 2,5 раза лучше, чем двухфазный.
При более высоком разрешении вы получаете меньший угол шага, что, в свою очередь, снижает вибрацию. Поскольку угол шага у 5-фазного в 2,5 раза меньше, чем у 2-фазного, звон, вибрации значительно ниже. Как в 2-фазном, так и в 5-фазном режиме ротор должен промахиваться или опускаться более чем на 3,6°, чтобы пропускать шаги. Поскольку угол шага 5-фазного двигателя составляет всего 0,72°, для двигателя почти невозможно превышение или недорегулирование на 3,6°. Вероятность потери синхронизма с 5-фазным шаговым двигателем очень мала.
Методы привода
Существует четыре различных метода привода шаговых двигателей:
- Волновой привод (полный шаг)
- 2 фазы включены (полный шаг)
- 1-2 фазы включены (половина шага)
- Микрошаг
Волновой привод
На приведенной ниже диаграмме метод волнового привода упрощен для лучшей иллюстрации теории. На иллюстрации каждый поворот на 90° соответствует 1,8° поворота ротора в реальном двигателе.
В методе волнового привода (также называемом методом однофазного включения) одновременно включается только одна фаза. Когда мы запитываем фазу А от южного полюса, она притягивает северный полюс ротора. Выключаем А и включаем В, ротор поворачивается на 90° (1,8°) и так далее. Каждый раз подается питание только на одну фазу.
Волновой привод имеет четырехступенчатую электрическую последовательность вращения двигателя.
2 фазы включены
В методе «2 фазы включены» две фазы всегда находятся под напряжением.
Еще раз на приведенном ниже рисунке каждые 90° представляют собой поворот на 1,8°. Если обе фазы A и B запитаны как южные полюса, северный полюс ротора будет одинаково притягиваться к обоим полюсам и выстраиваться прямо посередине. По мере того, как на фазы подается питание, ротор будет вращаться, чтобы выровняться между двумя полюсами, находящимися под напряжением.
Метод «двухфазного включения» включает четырехступенчатую электрическую последовательность вращения двигателя.
Стандартные 2-фазные и 2-фазные двигатели типа M компании ORIENTAL MOTOR используют метод «2 фазы вкл».
Какое преимущество имеет метод «2 фазы» по сравнению с методом «1 фаза»? Ответ — крутящий момент. В методе «1 фаза включена» одновременно включается только одна фаза, поэтому мы имеем одну единицу крутящего момента, действующую на ротор. В методе «2 фазы включены» у нас есть две единицы крутящего момента, действующие на ротор: 1 в положении на 12 часов и 1 в положении на 3 часа. Если мы сложим эти два вектора крутящего момента вместе, мы получим результат под углом 45°, а величина увеличится на 41,4%. Используя метод «2 фазы вкл.», мы можем получить тот же угол шага, что и метод «1 фаза вкл.», но с крутящим моментом на 41% больше.
Если мы сложим эти два вектора крутящего момента вместе, мы получим результат под углом 45°, а величина увеличится на 41,4%. Используя метод «2 фазы вкл.», мы можем получить тот же угол шага, что и метод «1 фаза вкл.», но с крутящим моментом на 41% больше.
Пятифазные двигатели немного отличаются. Вместо того, чтобы использовать метод «две фазы», мы используем метод «четыре фазы». Каждый раз мы включаем 4 фазы и мотор делает шаг.
Пятифазный двигатель проходит 10-ступенчатую электрическую последовательность.
1-2 фазы включены (полушаг)
Метод «1-2 фазы включен» или полушаг объединяет два предыдущих метода. В этом случае мы запитываем фазу А. Ротор выровняется. В этот момент мы держим фазу А включенной и активируем фазу В. Теперь ротор одинаково притягивается к обеим линиям вверх посередине. Ротор повернулся на 45° (0,9°). Теперь отключаем фазу А, но оставляем включенной фазу В. Мотор делает еще один шаг. И так далее и тому подобное.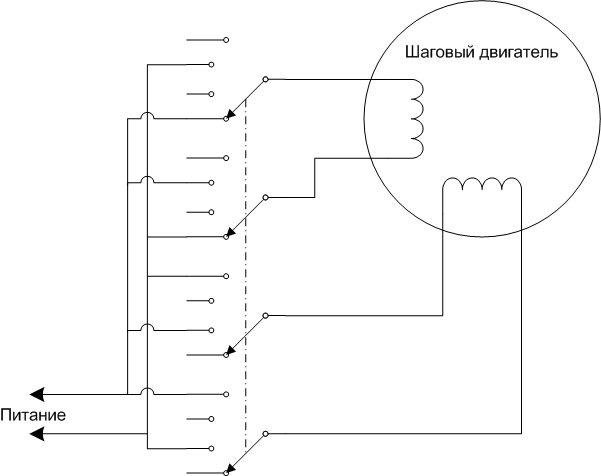 Чередуя одну фазу и две фазы, мы сократили угол шага вдвое. Помните, что при меньшем угле шага уменьшается вибрация.
Чередуя одну фазу и две фазы, мы сократили угол шага вдвое. Помните, что при меньшем угле шага уменьшается вибрация.
(Для 5-фазного двигателя мы чередуем 4 фазы и 5 фаз.)
Полушаговый режим имеет восьмиступенчатую электрическую последовательность. Для пятифазного двигателя в методе «4-5 фаз включено» двигатель проходит 20-ступенчатую электрическую последовательность.
Микрошаг
Микрошаг — это способ сделать маленькие шаги еще меньше. Чем меньше шаг, тем выше разрешение и лучше характеристики вибрации. В микрошаге фаза не полностью включена или полностью выключена. Он частично включен. Синусоидальные волны применяются как к фазе A, так и к фазе B, на расстоянии 90° друг от друга (0,9° в пятифазном шаговом двигателе).
Когда максимальная мощность находится в фазе A, фаза B равна нулю. Ротор выровняется с фазой A. По мере того, как ток в фазе A уменьшается, он увеличивается в фазе B. Ротор будет делать крошечные шаги к фазе B, пока фаза B не достигнет своего максимума, а фаза A не станет нулевой. Процесс продолжается вокруг других фаз, и у нас есть микрошаг.
Процесс продолжается вокруг других фаз, и у нас есть микрошаг.
Есть некоторые проблемы, связанные с микрошагом, в основном с точностью и крутящим моментом. Поскольку фазы являются только фазами, только частично запитаны, крутящий момент двигателя снижается, как правило, примерно на 30%. Кроме того, из-за того, что разница крутящего момента между ступенями настолько мала, двигатель иногда не может справиться с нагрузкой. В таких случаях двигателю можно дать команду двигаться на 10 шагов, прежде чем он действительно начнет движение. Во многих случаях необходимо замкнуть цикл с помощью энкодеров, которые увеличивают цену.
Системы шаговых двигателей
- Системы с открытым контуром
- Системы с замкнутым контуром
- Сервосистемы
Разомкнутый контур
Шаговые двигатели спроектированы как система разомкнутого контура. Генератор импульсов посылает импульсы в схему чередования фаз. Секвенсор фаз определяет, какие фазы необходимо отключить или включить, как описано в информации о полном шаге и полушаге.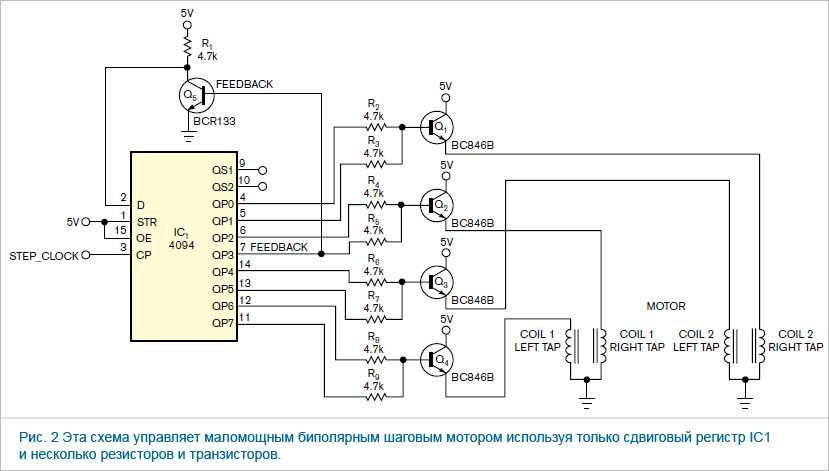 Секвенсор управляет полевыми транзисторами большой мощности, которые затем вращают двигатель.
Секвенсор управляет полевыми транзисторами большой мощности, которые затем вращают двигатель.
Однако в системе с разомкнутым контуром нет проверки положения и невозможно узнать, выполнил ли двигатель заданное движение.
Замкнутый контур
Самый популярный метод замыкания контура — установка энкодера на задний вал двухвального двигателя. Кодер представляет собой тонкий диск с линиями на нем. Диск проходит между передатчиком и приемником. Каждый раз, когда между ними появляется линия, на сигнальные линии выводится импульс. Эти импульсы возвращаются на контроллер, который ведет их подсчет. Обычно в конце перемещения контроллер сравнивает количество импульсов, отправленных водителю, с количеством импульсов, отправленных энкодером обратно. Обычно записывается процедура, согласно которой, если два числа различны, разница затем компенсируется. Если числа совпадают, ошибки не произошло и движение продолжается.
Этот метод имеет два недостатка: стоимость (и сложность) и отклик. Дополнительная стоимость энкодера, наряду с увеличением сложности контроллера, увеличивает стоимость системы. Кроме того, поскольку исправление (если оно есть) выполняется в конце хода, в систему может быть добавлено дополнительное время.
Дополнительная стоимость энкодера, наряду с увеличением сложности контроллера, увеличивает стоимость системы. Кроме того, поскольку исправление (если оно есть) выполняется в конце хода, в систему может быть добавлено дополнительное время.
Сервосистема
Другим вариантом является сервосистема. Сервосистема, как правило, представляет собой двигатель с малым числом полюсов, обеспечивающий высокую скорость, но не имеющий встроенной функции позиционирования. Чтобы сделать его устройством положения, требуется обратная связь, обычно и энкодер или резольвер, и контуры управления. Сервопривод по существу включается и выключается, пока счетчик резольвера не достигнет определенной точки. Следовательно, сервопривод работает на основе ошибки. Например, сервопривод получает команду двигаться на 100 оборотов. Счетчик резольвера показывает ноль, и двигатель включается. Когда счетчик резольвера достигает 100 оборотов, двигатель выключается. Если положение отклоняется, двигатель снова включается, чтобы вернуть его в исходное положение. Как сервопривод реагирует на ошибку, зависит от настройки усиления. Если настройка усиления высока, двигатель будет очень быстро реагировать на любые изменения ошибки. Если настройка коэффициента усиления низкая, двигатель не будет так быстро реагировать на изменения ошибки. Задействованы любые настройки усиления по времени, временные задержки вводятся в систему управления движением.
Как сервопривод реагирует на ошибку, зависит от настройки усиления. Если настройка усиления высока, двигатель будет очень быстро реагировать на любые изменения ошибки. Если настройка коэффициента усиления низкая, двигатель не будет так быстро реагировать на изменения ошибки. Задействованы любые настройки усиления по времени, временные задержки вводятся в систему управления движением.
AlphaStep Системы шаговых двигателей с замкнутым контуром
AlphaStep — революционный шаговый двигатель компании Oriental Motor. AlphaStep имеет встроенный резольвер, обеспечивающий обратную связь по положению. В любой момент времени мы знаем, где находится ротор.
Драйвер AlphaStep имеет входной счетчик. Подсчитываются все импульсы, поступающие на привод. Обратная связь резольвера поступает на счетчик положения ротора. Любое отклонение присутствует в счетчике отклонений. Обычно двигатель работает в разомкнутом контуре. Мы делаем векторы крутящего момента, и двигатель следует за ними. Если счетчик отклонения показывает что-то большее, чем ± 1,8°, то фазовращатель включает вектор крутящего момента в верхней части кривой смещения крутящего момента, генерируя максимальный крутящий момент, чтобы вернуть ротор в синхронное состояние. Если двигатель отключен на несколько ступеней, секвенсор активирует несколько векторов крутящего момента в верхней части кривой смещения крутящего момента. Водитель выдерживает перегрузку до 5 секунд. Если он не может вернуть двигатель в синхронизм в течение 5 секунд, водитель выдаст ошибку и отправит сигнал тревоги.
Если счетчик отклонения показывает что-то большее, чем ± 1,8°, то фазовращатель включает вектор крутящего момента в верхней части кривой смещения крутящего момента, генерируя максимальный крутящий момент, чтобы вернуть ротор в синхронное состояние. Если двигатель отключен на несколько ступеней, секвенсор активирует несколько векторов крутящего момента в верхней части кривой смещения крутящего момента. Водитель выдерживает перегрузку до 5 секунд. Если он не может вернуть двигатель в синхронизм в течение 5 секунд, водитель выдаст ошибку и отправит сигнал тревоги.
Отличительной особенностью AlphaStep является то, что он корректирует пропущенные шаги на лету. Он не ждет до конца движения, чтобы внести исправления. Как только ротор возвращается в пределах 1,8 °, драйвер возвращается в режим разомкнутого контура и посылает правильные фазы питания.
На приведенном ниже графике показана кривая смещения крутящего момента, когда блок находится в режиме разомкнутого или замкнутого контура.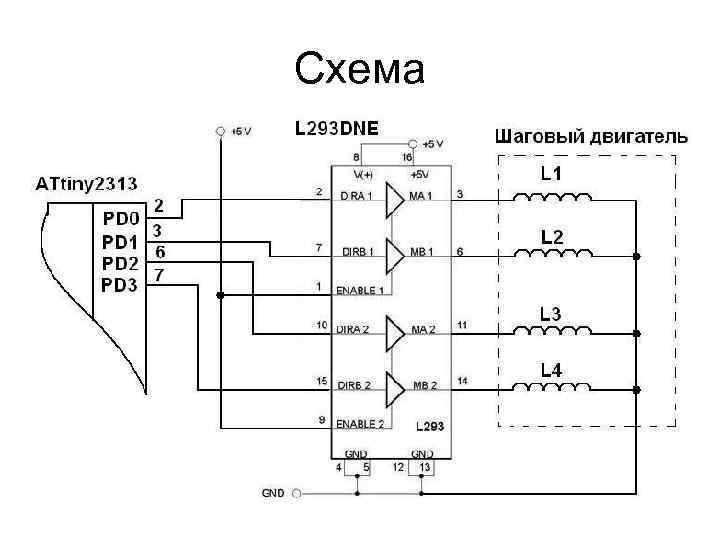 Кривая смещения крутящего момента представляет собой крутящий момент, создаваемый одной фазой. Он создает максимальный крутящий момент, когда зубья ротора смещены на 1,8°. Двигатель может пропустить шаг только в том случае, если он промахивается более чем на 3,6°. Поскольку водитель берет на себя управление вектором крутящего момента, когда он отклоняется на 1,8°, двигатель не может пропускать шаги, за исключением случаев, когда он перегружен более чем на 5 секунд.
Кривая смещения крутящего момента представляет собой крутящий момент, создаваемый одной фазой. Он создает максимальный крутящий момент, когда зубья ротора смещены на 1,8°. Двигатель может пропустить шаг только в том случае, если он промахивается более чем на 3,6°. Поскольку водитель берет на себя управление вектором крутящего момента, когда он отклоняется на 1,8°, двигатель не может пропускать шаги, за исключением случаев, когда он перегружен более чем на 5 секунд.
Многие думают, что точность шага AlphaStep составляет ± 1,8°. Точность шага AlphaStep составляет 5 угловых минут (0,083°). Водитель управляет векторами крутящего момента за пределами 1,8°. Оказавшись внутри 1,8°, зубья ротора выровняются с вектором создаваемого крутящего момента. AlphaStep следит за тем, чтобы правильный зуб совпадал с вектором крутящего момента.
AlphaStep доступен во многих версиях. ORIENTAL MOTOR предлагает версии с круглым валом и редуктором с несколькими передаточными числами для увеличения разрешения и крутящего момента или для уменьшения отраженной инерции. Почти все версии могут быть оснащены отказоустойчивым магнитным тормозом. ORIENTAL MOTOR также имеет версию 24 В постоянного тока, называемую серией ASC.
Почти все версии могут быть оснащены отказоустойчивым магнитным тормозом. ORIENTAL MOTOR также имеет версию 24 В постоянного тока, называемую серией ASC.
Заключение
Таким образом, шаговые двигатели отлично подходят для позиционирования. Шаговые двигатели можно точно контролировать как по расстоянию, так и по скорости, просто изменяя количество импульсов и их частоту. Их большое количество полюсов дает им точность, и в то же время они работают без обратной связи. Если размер шагового двигателя подобран правильно для приложения, шаговый двигатель никогда не пропустит ни одного шага. А поскольку им не нужна позиционная обратная связь, они очень экономичны.
Учебное пособие по шаговым двигателям. Как предотвратить потери шагов с помощью шаговых двигателей
Использование шаговых двигателей — отличный выбор. Тем не менее, ключевой проблемой являются потери шага. Потери ступеней в большинстве случаев можно предотвратить или исправить.
Шаговые двигатели работают без обратной связи.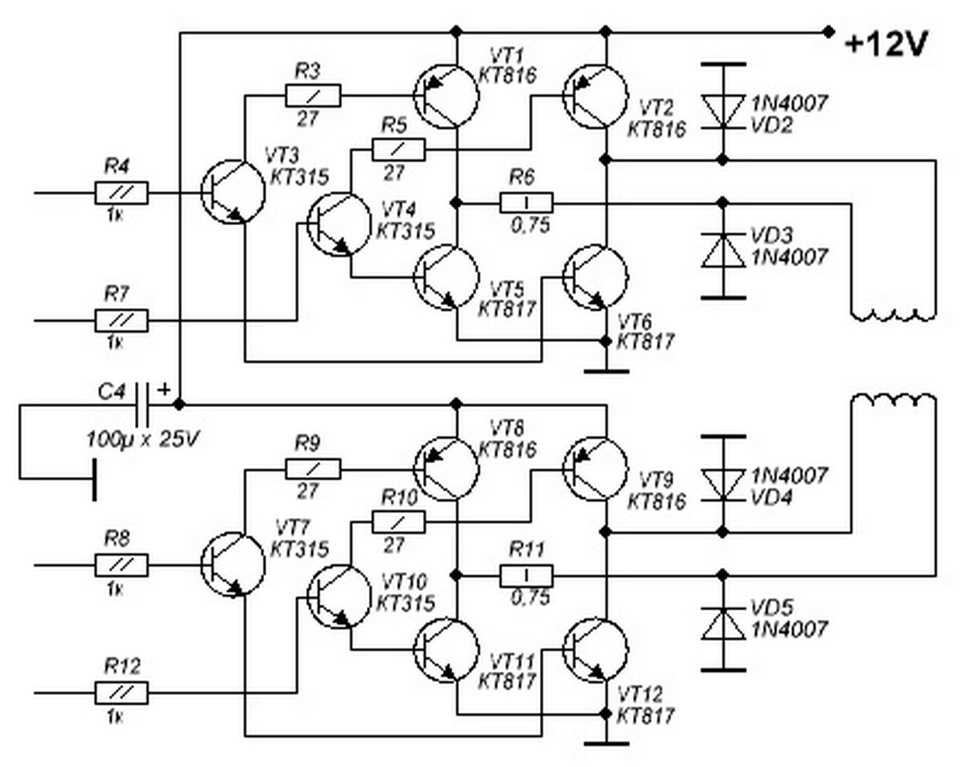 Когда шаговый двигатель не работает должным образом в определенной ситуации, общий вывод состоит в том, что либо двигатель, либо электроника привода неисправны. Выбор двигателя и выбор контроллера имеют решающее значение. Однако другие факторы способствуют потерям шага.
Когда шаговый двигатель не работает должным образом в определенной ситуации, общий вывод состоит в том, что либо двигатель, либо электроника привода неисправны. Выбор двигателя и выбор контроллера имеют решающее значение. Однако другие факторы способствуют потерям шага.
Следующие пункты важно исследовать для анализа ступенчатых потерь или неработоспособности в различных приложениях.
Скачать
A. Выбор шагового двигателя
Первая задача — правильно выбрать шаговый двигатель для приложения. Для наилучшего выбора необходимо соблюдать следующие основные теоретические правила:
1. Выберите двигатель, исходя из максимальной точки крутящего момента/скорости, необходимой для приложения (выбор на основе наихудшего случая)
2. Используйте расчетный запас в 30 % от опубликованной кривой зависимости крутящего момента от скорости (кривая выдвижения).
3. Убедитесь, что приложение не может быть остановлено внешними событиями
Важно помнить, что шаговый двигатель не работает как двигатель постоянного тока. Параметризация рабочей точки отсутствует, и фазный ток не увеличивается при увеличении нагрузки. Если соотношение скорости и крутящего момента соответствует техническим характеристикам двигателя, проблем не возникнет. Если это требование не соответствует техническим характеристикам, двигатель глохнет (функция OK или NOT OK). В любом случае ток в фазах не меняется и подстраивается под ситуацию.
Параметризация рабочей точки отсутствует, и фазный ток не увеличивается при увеличении нагрузки. Если соотношение скорости и крутящего момента соответствует техническим характеристикам двигателя, проблем не возникнет. Если это требование не соответствует техническим характеристикам, двигатель глохнет (функция OK или NOT OK). В любом случае ток в фазах не меняется и подстраивается под ситуацию.
Следующим шагом является проверка двигателя с помощью практических испытаний и проверка того, не возникают ли во время работы ступенчатые потери. Обратите внимание, что по своей конструкции шаговый двигатель не может потерять только один шаг. Если скорость низкая, он потеряет кратность 4 шагам (8, 12, 16… шагов), а если скорость высокая, то перестанет вращаться. В случаях потери менее 4 ступеней причина в коммутации.
Поскольку двигатель обычно не оборудован устройством обратной связи и поскольку ток двигателя не оказывает никакого влияния, найти основную причину неисправности не всегда легко.
В следующих разделах приведены некоторые возможные первопричины в случае сбоя квалификационного теста.
Б. Режим работы
В зависимости от типа профиля движения анализ различается
B1. Старт-стоп
В этом режиме работы двигатель подключается к нагрузке и работает с постоянной скоростью. Двигатель должен разогнать нагрузку (инерцию и трение) в течение первого шага до заданной частоты.
Рис.1. Старт-стоп частота
Режим отказа: двигатель не запускается
БИ 2. Профиль ускорения и рампы (трапециевидный)
В этом случае двигателю разрешено разгоняться до максимальной частоты с заданной в драйвере скоростью ускорения.
Рис.2. Трапециевидный профиль скорости
Режим отказа: двигатель не запускается
Причины и решения см. в B1 «Старт-стоп».
Режим отказа: двигатель не завершает рампу ускорения.
Режим отказа: двигатель завершает разгон, но останавливается при достижении постоянной скорости.

C. Ошибки внешней коммутации
Как объяснялось ранее, шаговый двигатель по своей конструкции теряет количество шагов, кратное 4 (8, 12, 16… шагов). Если скорость высока, потеря шага приведет к потере синхронизма. Мотор глохнет. Если количество пропущенных ступеней не кратно 4 ступеням, двигатель исправен, и исследование должно быть сосредоточено на последовательности коммутации, обеспечиваемой электроникой.
Показанный драйвер представляет собой тип, которым можно управлять без какого-либо дополнительного элемента управления напрямую с помощью 4-битного слова.
Рис.4. Типичный драйвер
Коммутация происходит следующим образом (режим работы одной фазы ВКЛ):
Таблица 1: Коммутация одной фазы ВКЛ — типичный драйвер
Эта последовательность обычно не является причиной какого-либо сбоя или потери ступеней во время нормальной работы, когда ток подается все время на фазы. Это меняется при отключении питания.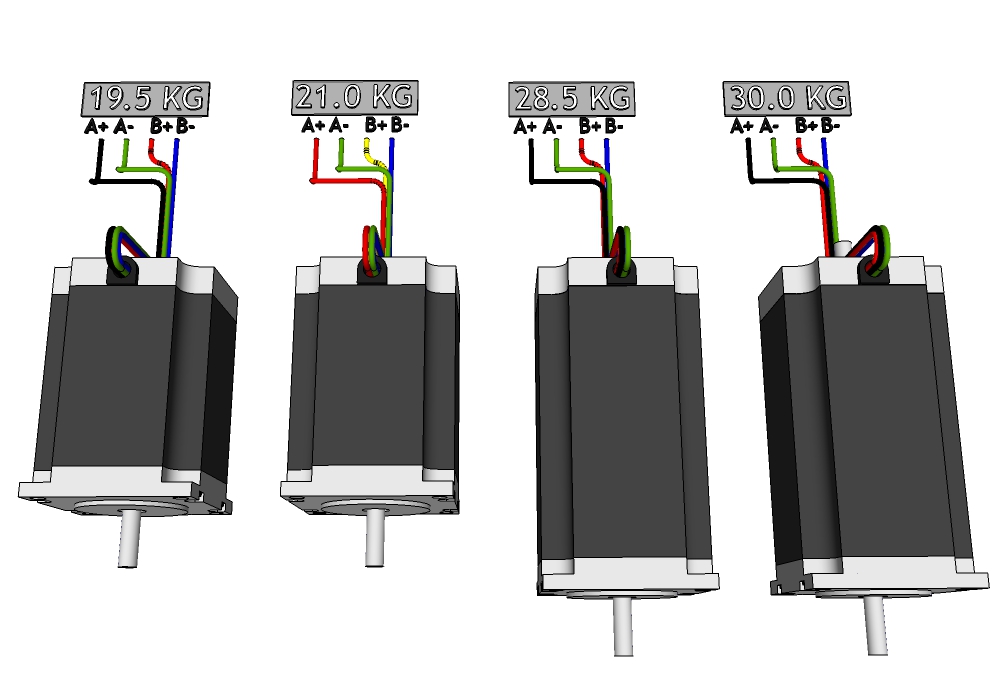 При отключении питания контроллера, который обеспечивает 4 бита примера (4 бита для Phase1, Phase2, Enable1, Enable2), статус счетчика будет потерян, что необходимо для обеспечения непрерывной пошаговой последовательности в соответствии с приведенной выше таблицей.
При отключении питания контроллера, который обеспечивает 4 бита примера (4 бита для Phase1, Phase2, Enable1, Enable2), статус счетчика будет потерян, что необходимо для обеспечения непрерывной пошаговой последовательности в соответствии с приведенной выше таблицей.
Таким образом, при включении питания не гарантируется, что счетчик найдет положение, которое было до отключения питания. Если есть разница между положением счетчика и реальным положением ротора, двигатель будет выполнять неконтролируемые шаги. Максимальная ошибка может составлять 2 шага в направлении против часовой стрелки или по часовой стрелке.
Решение
Перед выключением питания запомните 4-битное слово (больше для более сложных приводов) и перезагрузите его из памяти для инициализации счетчика. Снова включите питание в этом положении, прежде чем продолжить коммутацию.
D. Внешние события
Д1. Заднее вождение
В некоторых случаях механизм/нагрузка, приводимая в движение двигателем, во время движения заводится и возвращает эту энергию обратно двигателю при отключении токов.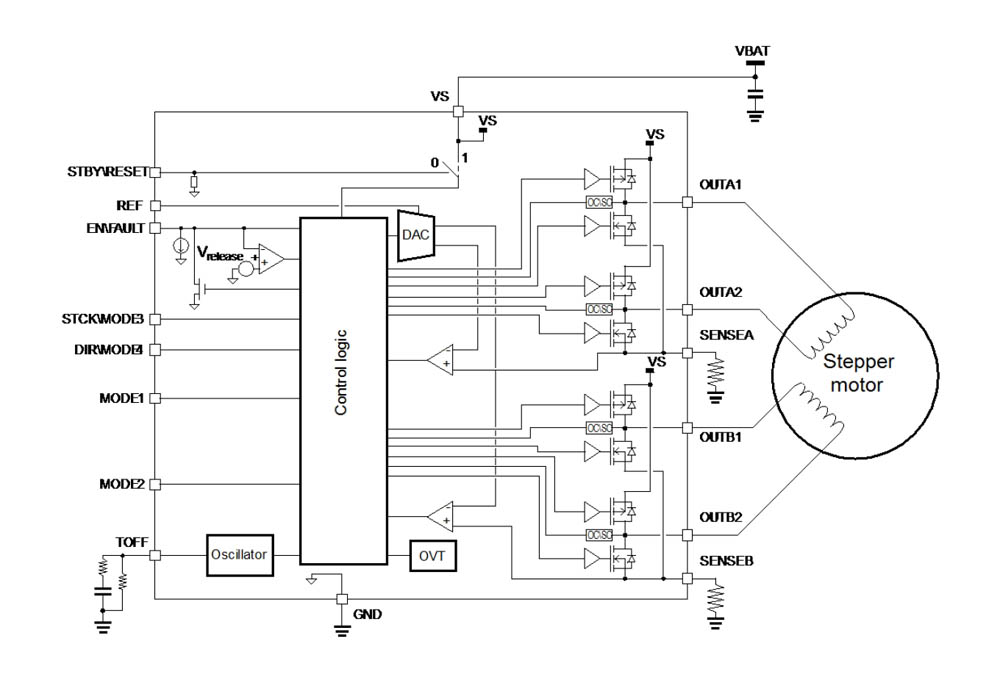 Этот механизм может быть редуктором.
Этот механизм может быть редуктором.
Поскольку механизм возвращает эту энергию обратно, вал двигателя может вращаться назад. Если это обратное движение больше, чем угол одного шага, двигатель при включении тока для следующего движения не будет развивать достаточный крутящий момент для завершения первого шага. Он может не запуститься или запуститься только после 4 полных шагов.
Этот тип отказа также приводит к потере как минимум одного коммутационного цикла из 4 ступеней.
Этот тип отказа может возникнуть только в приложениях, где токи двигателя значительно уменьшаются или отключаются после движения.
Решения
- Запрограммируйте коммутацию таким образом, чтобы значение и полярность токов двигателей сохранялись до их отключения. Сохраненные значения должны применяться при повторном включении тока двигателя.
- Вместо отключения питания поддерживайте пониженный ток в режиме ожидания каждый раз, когда двигатель останавливается.
