Содержание
» Управление шаговым двигателем
Это
довольно простая схема контроллера шагового двигателя, которая позволит
вам точно управлять однополярным шаговым двигателем через параллельный
порт вашего компьютера. Шаговый двигатель можно применить в
конструировании роботов, в изготовлении печатных плат, использовать в
качестве микродрели, автоматической кормушки для аквариумных рыбок и
т.д. Если вы никогда не работали с шаговыми двигателями, то эта статья для вас.
Как работает шаговый двигатель?
Шаговые двигатели отличаются от
регулируемых двигателей постоянного тока. Вместо того чтобы вращаться
как двигатели постоянного тока, шаговый двигатель совершает
дискретное вращение под воздействием серии импульсов. В нашем примере
двигателю необходимо 48 импульсов чтобы совершить полный оборот в
360 градусов.
Другое преимущество шаговых двигателей
— то, что их скорость вращения может быть достигнута почти мгновенно
при изменении направления вращения на противоположное.
Шаговый двигатель состоит из ротора -
постоянного магнита, который вращается внутри, и статор — четыре
катушки (север, восток, юг, запад), которые являются частью корпуса и
не перемещаются. Ротор совершает вращение посредством последовательных
импульсов напряжение постоянного тока подаваемого к одной или
двум катушкам одновременно.
Устройство Шагового двигателя.
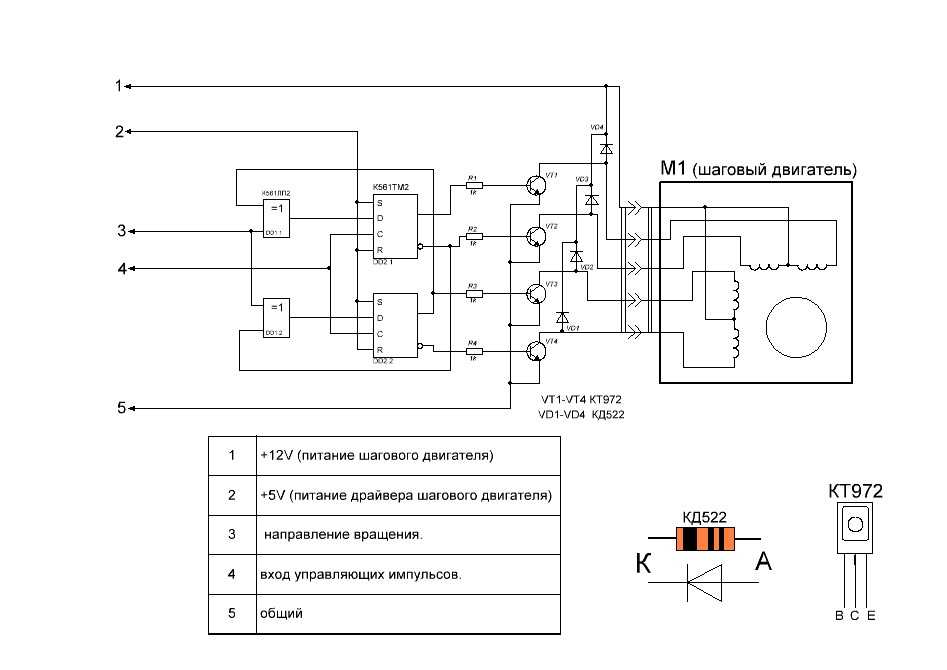
Чтобы управлять шаговым двигателем
необходим контроллер. Контроллер — схема, которая подает напряжение к
любой из четырех катушек статора. Устройство может быть построено с
использованием интегральной микросхемы типа ULN2003
(отечественный аналог К1109КТ22)
состоящая из набора мощных составных ключей с защитными диодами
на выходе. Наличие защитных диодов позволяет подключать индуктивные
нагрузки без дополнительной защиты от выбросов обратного
напряжения.
Подключения шагового двигателя.
Однополярный двигатель должен иметь
пять или шесть контактов в зависимости от модели. Если двигатель имеет
Если двигатель имеет
шесть контактов то необходимо соединить выводы 1 и 2 (красный) вместе и
подключить их к плюсу 12-24V напряжения питание. Оставшиеся выводы a1
(желтый), b1 (черный), a2 (оранжевый), b2 (коричневый) подключить к
контроллеру согласно схеме.
Способы управления.
Есть несколько способов, которые вы можете использовать, чтобы управлять шаговым двигателем.
1. Одиночные импульсы
— самый простой способ. Одновременно подключается только одна
катушка. Необходимо 48 пульсов чтобы ротор совершил один
полный оборот. Каждый пульс перемещает ротор на 7,5 градусов.
2. Двойной импульс -
одновременное подключение двух соседних катушек. В этом случае также
необходимо 48 пульсов чтобы ротор совершил один полный оборот. Каждый
пульс перемещает ротор на 7,5 градусов.
3. Комбинированные импульсы
— чередование первого и второго способа.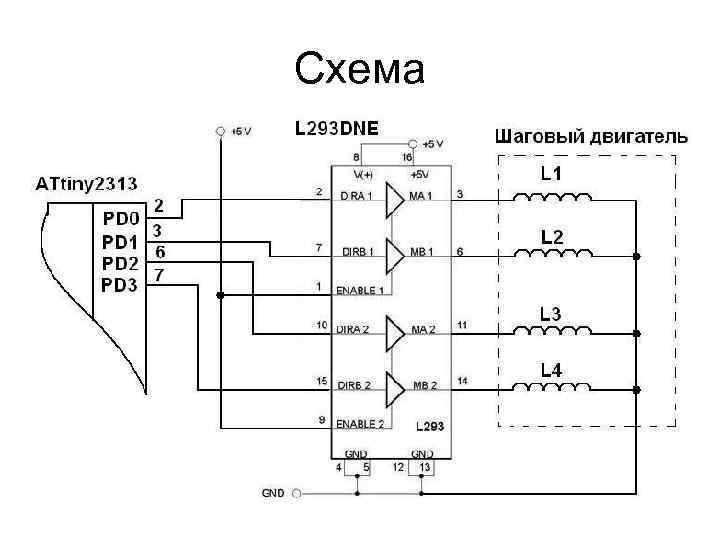 Двигатель нуждается в 96
Двигатель нуждается в 96
пульсах, чтобы совершить один оборот. Каждый пульс перемещает ротор
приблизительно на 3,75 градуса.
Программное обеспечение контроллера шагового двигателя.
Для управления работой шагового
двигателя используем компьютер и программу. При использовании
компьютера вы будете в состоянии сделать намного больше с вашим шаговым
двигателем и наиболее важно — визуализировать, как ток течет через
катушки.
В программе понятный графический
интерфейс, который позволяет точно управлять скоростью двигателя и
направлением вращения в реальном времени, а также позволяет выбирать
способы управления. Программа работает с версией Windows
(98/ME/2000/XP).
Скачать программу
(104.2 Kb, скачено — 5,962 )
Управление шаговыми двигателями с помощью Simatic S7-1200 с ограниченным количеством импульсных выходов / Хабр
В конце прошлого года ко мне обратилась одна фирма, которая предоставляет комплексные решения для зерновых культур с предложением рассмотреть проект автоматизации небольшой системы отбора проб зерна. Особенностью данного проекта являлось то, что конструктивные решения и исполнительные приводы уже были разработаны и реализованы в железе. Не вдаваясь в подробности технологического процесса отбора проб можно сказать, что цель автоматизации – это управление механическими задвижками зерно-воздушного потока, запуск шнекового смесителя для однородности проб, управление электродвигателями воздушных турбин, обработка управляющих сигналов оператора и датчиков некоторых шагов операций. Задвижки и смеситель были спроектированы так, что приводились в движение с помощью шаговых двигателей.
Особенностью данного проекта являлось то, что конструктивные решения и исполнительные приводы уже были разработаны и реализованы в железе. Не вдаваясь в подробности технологического процесса отбора проб можно сказать, что цель автоматизации – это управление механическими задвижками зерно-воздушного потока, запуск шнекового смесителя для однородности проб, управление электродвигателями воздушных турбин, обработка управляющих сигналов оператора и датчиков некоторых шагов операций. Задвижки и смеситель были спроектированы так, что приводились в движение с помощью шаговых двигателей.
Раннее было принято решение построить систему автоматизации на базе одноплатного микрокомпьютера Orange pi plus 2e и микроконтроллера Arduino Nano. Для этих плат нашлось применения для другого подобного проекта, но это уже другая история. Но в последствии, после обсуждений всех преимуществ и недостатков остановились на PLC CPU 1214C DC/DC/DC с каталожным номером 6ES7 214-1AG40-0XB0 у которого на борту можно сконфигурировать до четырех импульсных выводов управления и модуль дискретных выходов SM 1222 DQ16 x 24VDC с каталожным номером 6ES7 222-1Bh42-0XB0.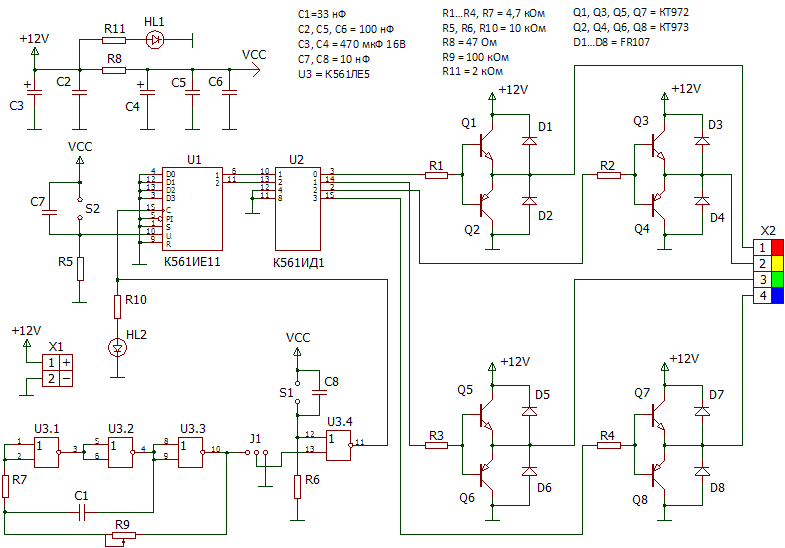 Шаговые двигатели были выбраны из серии KRS56, управляемые драйверами TB6560 V2.
Шаговые двигатели были выбраны из серии KRS56, управляемые драйверами TB6560 V2.
Выше представлено изображение из functional manual S7-1200 Motion Control V13 SP1 для понимания общей картины структуры управления
Рисунок 1 – схема выходов управления драйверами ШД и схема подключения ШД
Загвоздка состояла в том, что хотели найти компромис между бюджетом и оптимально выбранными комплектующими. И первая задача по управлению состояла в том, что на борту PLC только четыре импульсных вывода, а в исходном проекте необходимо было управлять восьмью шаговыми двигателями и одним сервоприводом по ШИМ. После ознакомления с тех-требованиями алгоритма управления системы выяснилось, что одновременный запуск приводов (шаговых двигателей) был не более двух единиц. И конструкция задвижек позволяла оставлять их без удерживающего момента. Поэтому решил реализовать программно так, чтобы один импульсный вывод можно задействовать для множества драйверов шаговых двигателей, управляя разрешающим входом EN драйвера.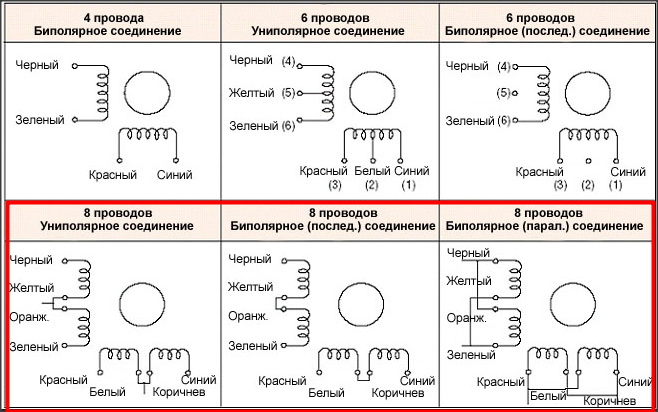 Импульсный вывод ШИМ управления сервопривода, конечно, оставался обособленно, т.к. это является аппаратно сконфигурированным. Таким образом я реализовал функциональный блок управления ШД. Алгоритм управления системой был выполнен в программном пакете TIA Portal v14 на графическом языке LAD.
Импульсный вывод ШИМ управления сервопривода, конечно, оставался обособленно, т.к. это является аппаратно сконфигурированным. Таким образом я реализовал функциональный блок управления ШД. Алгоритм управления системой был выполнен в программном пакете TIA Portal v14 на графическом языке LAD.
Рисунок 2 – Функциональный блок управления драйвером ШД
Внутри функциональный блок представляет собой простую дискретную логику на лестничной диаграмме с сохранением состояния и таймаутом на срабатывание
Рисунок 3 – Функциональный блок детально
Настройка и программирование импульсных выходов для управления шаговыми двигателями подробно расписаны в мануалах, например STEP 7 S7- — 1200 Motion Control V13 SP1, также в сети есть видеоролики с объснением требуемых шагов
Приведу лишь пару скриншотов настройки импульсного выхода в моем проекте
Рисунок 4 – параметрирование импульсного выхода
Для управления непосредственно самим ипульсным выходом необходимо использовать библиотечные функции такие как MC_Power, MC_Home, MC_MoveAbsolute и прочие в данном разделе.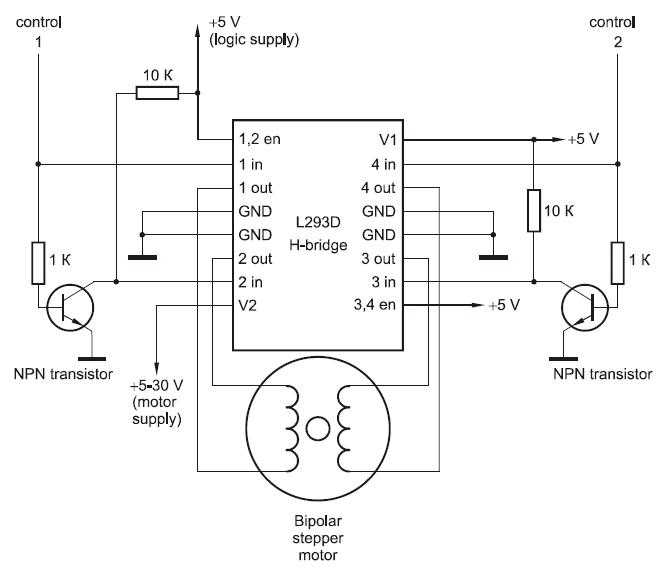 Подробное описание функций находится в справочном разделе TIA Portal и в указанных мануалах.
Подробное описание функций находится в справочном разделе TIA Portal и в указанных мануалах.
На следующем рисунке приведены части логики, где в части и части 2 показано использование библиотечных функциональных блоков управления ипульсными выходами. Блок MC_Power используется для инициализации аппаратного управления, блок MC_Home – для обнуления позиции. Так как логика работы управления ШД поворотной части задвижки основывается на выборе точных позиций опытным путем, то используется блок MC_MoveAbsolute, где значения точных позиций и скорость являются уставками и расположены в соответсвующих тегах блока данных. На скрине упущены промежуточные преобразования между управляющим экземпляром блока FB1 SHUTTER и блоком MC_MoveAbsolute. Если кратко, то выходные сигналы из первого блока, такие как SW_OUT_EN – разрешение запуска драйвера ШД, являются входными для второго блока в качестве сигнала “execute”. На рисунке в части 3 и 4 показано управление выходными сигналами PLC, идущими на входа драйверов ШД, которые также формируются в блоке FB1 SHUTTER. Другими словами, можно создать множество экземпляров данного блока FB1 SHUTTER, связанного с управляющими библиотечными блоками импульсных выходов. Но соответствующие драйверы ШД будут задействованы только при наличии (или отсутствии в зависимости от схемы подключения) разрещающих входных сигналов, которые можно формировать отдельными ветвями логики.
Другими словами, можно создать множество экземпляров данного блока FB1 SHUTTER, связанного с управляющими библиотечными блоками импульсных выходов. Но соответствующие драйверы ШД будут задействованы только при наличии (или отсутствии в зависимости от схемы подключения) разрещающих входных сигналов, которые можно формировать отдельными ветвями логики.
Рисунок 5 – Логика управления импульсным выходом
В следующей статье я хочу показать, как можно создать несложный HMI на основе Node-red js-библиотек scadavis.io для контроля и визуацилизации процесса для Simatic PLC
Управление шаговым двигателем | Все о шаговых двигателях
Сохранить
Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Шаг во времени, шаг во времени
Давай, друзья, шаг во времени
Шаг во времени
Шаг во времени, шаг во времени
Шаг во времени, шаг во времени
2 Никогда не нужна причина, никогда не нужна рифма
Мы шагаем во времени, мы шагаем во времени
«Шаг во времени»
Роберт Б. Шерман и Ричард М. Шерман
Шерман и Ричард М. Шерман
Управление шаговым двигателем немного сложнее управления обычным щеточным двигателем постоянного тока. Шаговым двигателям требуется шаговый контроллер для включения фаз в своевременной последовательности, чтобы двигатель вращался.
Простейший тип драйвера можно собрать из нескольких транзисторов. Они просто последовательно включаются и выключаются, чтобы подавать питание на фазы и двигать двигатель. Униполярные драйверы относительно недороги в изготовлении, но работают только с униполярными двигателями. На сайте Arduino есть отличное руководство по его сборке.
Учебное пособие по униполярному шаговому приводу
Для управления биполярным двигателем требуется 2 полных Н-моста, чтобы он мог реверсировать ток в фазах. Н-мосты сложно построить с нуля. Но для упрощения задачи доступно множество чипов H-bridge.
L293D — один из самых популярных и экономичных чипов. Их можно найти в основе большинства моторных щитов первого поколения, в том числе невероятно популярного V1 Adafruit Motor Shield.
Их можно найти в основе большинства моторных щитов первого поколения, в том числе невероятно популярного V1 Adafruit Motor Shield.
Есть отличный туториал по использованию голого L293D с Arduino в системе обучения Adafruit:
Урок 16 — Шаговые двигатели
Adafruit Motor Shield V2 — это большой шаг вперед по сравнению с базовыми контроллерами на базе L293D. Экран V2 использует два драйвера MOSFET TB6612. По сравнению с L293D, TB6612 обеспечивает удвоенную пропускную способность по току и значительно меньшее падение напряжения, что позволяет более эффективно управлять шаговыми двигателями.
Всего с 2 микросхемами драйверов и 4 полными H-мостами каждый шилд может управлять двумя шаговыми двигателями. Чипы драйверов взаимодействуют через специальный чип драйвера ШИМ с интерфейсом I2C. Это освобождает множество контактов GPIO для других целей, а также делает экран штабелируемым. Вы можете сложить до 32 из них для управления 64 двигателями всего с 2 контактами ввода-вывода!
Информацию об этом гонщике можно найти в системе обучения.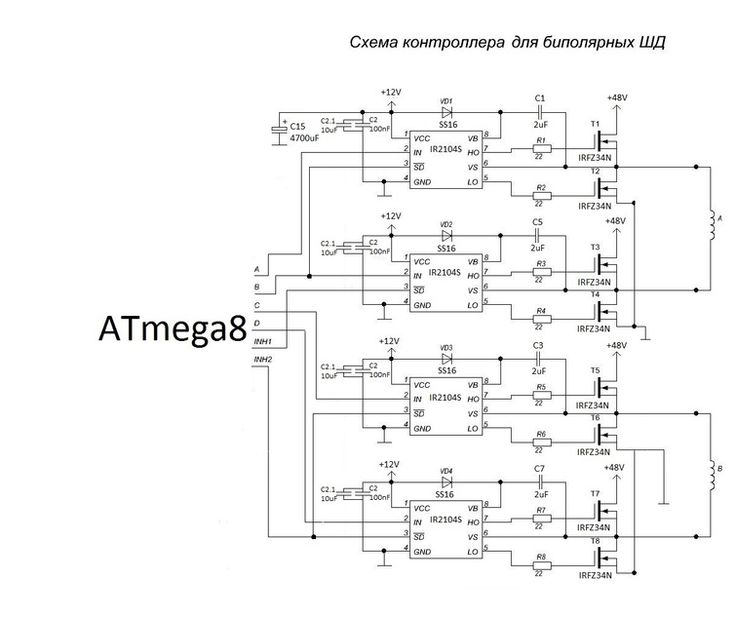
Направляющая Adafruit Motor Shield V2
Платы контроллеров ЧПУ gShield и TinyG делают вас на шаг ближе к шаговым двигателям промышленного уровня. Эти платы оснащены драйверами «прерывателя» постоянного тока, которые можно настроить для обеспечения максимального крутящего момента и скорости от ваших двигателей.
ЧПУ TinyG имеет встроенный интерпретатор G-кода и 4 выхода двигателя, что делает его полным встроенным решением для 4-осевого станка с ЧПУ малого и среднего размера.
Как и следовало ожидать, эти усовершенствованные высокопроизводительные платы более сложны в работе и рекомендуются для опытных пользователей.
Подробности об этих платах и их работе можно найти в TinyG Wiki и на форумах Synthetos.
Форумы Synthetos
Tiny G Wiki
Типы шаговых двигателей
Сопоставление драйвера с шаговым двигателем
Это руководство было впервые опубликовано 05 мая 2014 г. Оно было последним
обновлено 05 мая 2014 г.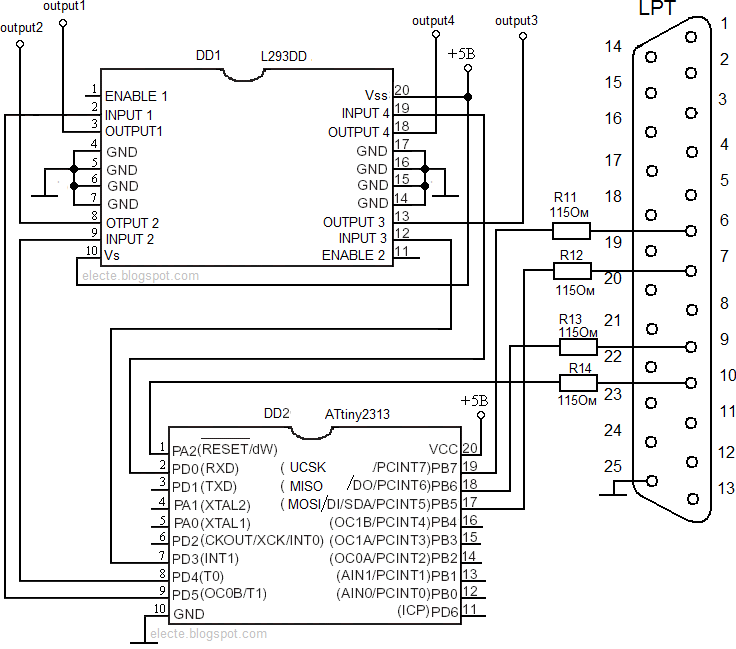
Эта страница (Управление шаговым двигателем) последний раз обновлялась 26 апреля 2014 г.
Текстовый редактор на базе tinymce.
Основы драйвера шагового двигателя | Видео TI.com
- Учебный дом TI
- Лаборатория точности TI
- TI Precision Labs — Драйверы двигателей
- Шаговые двигатели
- Основные сведения о драйвере шагового двигателя
Лаборатория TI Precision
МЕНЮ
TI Precision Labs — Усилители (106)
TI Precision Labs — Часы и хронометраж (18)
TI Precision Labs — Преобразователи данных (88)
TI Precision Labs — интерфейс (44)
TI Precision Labs — Изоляция (18)
TI Precision Labs — Микроконтроллеры (18)
TI Precision Labs — драйверы двигателей
(35)Знакомство с драйверами двигателей (2)
Коллекторные двигатели постоянного тока (4)
Шаговые двигатели (8)
Бесщеточные двигатели постоянного тока (9)
Моторная техника (4)
Проектирование с помощью драйверов двигателей (8)
TI Precision Labs — Коммутаторы и мультиплексоры (22)
TI Precision Labs — датчики (77)
TI Precision Labs — Аудио (7)
Электронная почта
[ВОСПРОИЗВЕДЕНИЕ МУЗЫКИ] Добро пожаловать в первую главу серии TI Precision Labs, посвященной шаговым двигателям. Меня зовут Джеймс Локридж, и сегодня я расскажу об основах шаговых двигателей. Во многих приложениях используются шаговые двигатели, поскольку они обеспечивают точное управление положением без использования внешних датчиков или сложных алгоритмов управления.
Меня зовут Джеймс Локридж, и сегодня я расскажу об основах шаговых двигателей. Во многих приложениях используются шаговые двигатели, поскольку они обеспечивают точное управление положением без использования внешних датчиков или сложных алгоритмов управления.
Иногда это называется управлением положением без обратной связи. Шаговый двигатель может обеспечивать непрерывное движение или поддерживать фиксированное положение ротора в зависимости от требований системы. Эти особенности делают степперы простыми в реализации и недорогим решением для разработчиков систем.
Прежде чем углубиться в тему шаговых двигателей, я рассмотрю, какое место они занимают среди других распространенных типов двигателей: коллекторные двигатели постоянного тока, бесщеточные двигатели постоянного тока и шаговые двигатели являются наиболее распространенными типами двигателей, питаемых от источников постоянного тока. Коллекторные двигатели постоянного тока имеют обмотку на роторе.
Щетки из металла или углерода подают питание на обмотку через коммутатор на роторе. При вращении ротора коммутатор меняет направление тока, протекающего по обмоткам. Когда ток меняет направление в обмотке ротора, меняется полярность магнитного поля ротора. Коммутатор гарантирует, что полярность магнитного поля на роторе всегда противоположна магнитному полю, создаваемому магнитами или обмотками на статоре. Это создает непрерывное движение в коллекторном двигателе постоянного тока.
При вращении ротора коммутатор меняет направление тока, протекающего по обмоткам. Когда ток меняет направление в обмотке ротора, меняется полярность магнитного поля ротора. Коммутатор гарантирует, что полярность магнитного поля на роторе всегда противоположна магнитному полю, создаваемому магнитами или обмотками на статоре. Это создает непрерывное движение в коллекторном двигателе постоянного тока.
Бесщеточный двигатель постоянного тока содержит постоянные магниты на роторе и обмотки на статоре. Это противоположно конструкции коллекторного двигателя постоянного тока. Для бесщеточного двигателя постоянного тока нет ни щеток, ни механического коммутатора.
Коммутация осуществляется электрически. Как правило, бесщеточные двигатели постоянного тока имеют три фазы, которые создают движение при подаче питания в правильной последовательности. Анимация и изображение показывают асинхронный двигатель с магнитами ротора, расположенными в виде кожуха вокруг внутренней обмотки статора.
Шаговые двигатели похожи на бесщеточные двигатели постоянного тока, поскольку они также управляют коммутацией электрически. Шаговые двигатели обычно имеют только две фазы. Однако существуют степперы с тремя и более фазами.
Шаговые двигатели обычно имеют только две фазы. Однако существуют степперы с тремя и более фазами.
Ротор шагового двигателя перемещается дискретными позиционными шагами в зависимости от величины и направления токов в каждой фазной обмотке. Шаговые двигатели бывают трех основных типов: с постоянными магнитами, гибридные и с переменным сопротивлением. Шаговый двигатель с постоянными магнитами имеет постоянный магнит на роторе.
Катушки обмотки ориентированы вокруг той же оси, что и ротор. Зубья ротора на статоре помогают направить магнитное поле от ротора для взаимодействия с обмотками на статоре. Магнитные полюса ротора ориентированы параллельно оси вращения ротора на поверхности ротора. Движение ротора происходит, когда постоянный магнит перемещается, чтобы выровняться с магнитным полем обмотки под напряжением.
В двигателе с переменным сопротивлением не используются постоянные магниты. Ротор изготовлен из той же магнитной стали, что и статор. Двигатель с переменным магнитным сопротивлением получил свое название потому, что магнитное поле заставляет ротор перемещаться в положение, при котором воздушный зазор и магнитное сопротивление минимальны. Разница в сопротивлении создается формой зубьев статора как на роторе, так и на статоре. Шаговый двигатель с переменным магнитным сопротивлением обычно требует по крайней мере трехфазных обмоток для эффективного управления направлением вращения ротора.
Разница в сопротивлении создается формой зубьев статора как на роторе, так и на статоре. Шаговый двигатель с переменным магнитным сопротивлением обычно требует по крайней мере трехфазных обмоток для эффективного управления направлением вращения ротора.
Гибридный шаговый двигатель получил свое название, потому что ротор содержит постоянный магнит, а статор и ротор имеют зубья ротора, как и шаговый двигатель с переменным сопротивлением. Постоянный магнит шагового двигателя ориентирован магнитным полем в том же направлении, что и ось вращения ротора. Это отличается от конструкции шагового двигателя с постоянными магнитами.
Зубья ротора на торцевых крышках с обеих сторон магнита перенаправляют путь магнитного потока наружу от магнита к зубцам статора, чтобы максимизировать взаимодействие магнитного поля с обмотками. Из трех типов двигателей гибридные двигатели являются наиболее распространенными, а двигатели с переменным сопротивлением — наименее распространенными.
Двигатели с постоянными магнитами и гибридные шаговые двигатели обычно имеют две фазные обмотки, хотя в некоторых случаях их может быть больше.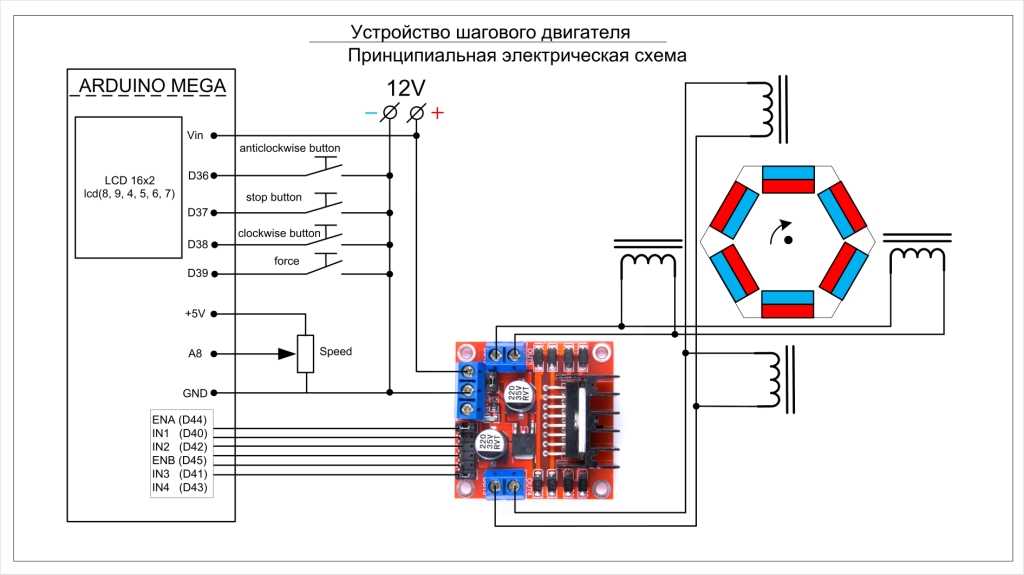 Гибридные двигатели обычно имеют меньший размер шага и более высокий крутящий момент, чем шаговые двигатели с постоянными магнитами.
Гибридные двигатели обычно имеют меньший размер шага и более высокий крутящий момент, чем шаговые двигатели с постоянными магнитами.
Гибридные шаговые двигатели и шаговые двигатели с постоянными магнитами бывают биполярными и униполярными. Для биполярных двигателей H-мосты позволяют току течь в любом направлении через обмотку. Направление тока определяет полярность магнитного поля, создаваемого этой обмоткой.
Униполярным двигателям нужны только полевые транзисторы нижнего или верхнего плеча, чтобы пропускать ток в одном направлении через обмотки. Обмотка униполярного двигателя имеет средний отвод, который можно подключить к земле или к источнику питания двигателя. Вместо того, чтобы управлять током в двух направлениях для изменения полярности магнитного поля статора, катушки для определенной фазы наматываются в противоположных направлениях, чтобы добиться изменения полярности магнитного поля, необходимого для продолжения движения ротора. Униполярные двигатели могут управляться как биполярные двигатели, если центральные отводы не подключены, а катушки подключены к драйверу биполярного шагового двигателя.
Встроенные драйверы шаговых двигателей контролируют положение ротора, возбуждая обмотки шаговых двигателей в определенной последовательности. В этом примере микроконтроллер посылает импульс драйверу шагового двигателя, чтобы указать, что ротор шагового двигателя должен переместиться в следующую позицию. Когда драйвер шагового двигателя получает импульс шага, он активирует одну из фазных обмоток в последовательности.
Когда он получает следующий импульс, он активирует следующую фазу, чтобы ротор мог продолжать движение. H-мосты, встроенные в драйвер шагового двигателя, контролируют ток в фазных обмотках в обоих направлениях, чтобы изменить полярность обмоток и продолжить движение ротора. Если микроконтроллер перестанет посылать ступенчатые импульсы, ротор останется неподвижным и выровняется с магнитным полем фазы, находящейся под напряжением.
Встроенные драйверы шаговых двигателей часто реализуют дополнительные функции защиты, микрошагов и настройки шаговых двигателей. Для получения дополнительной информации о шаговых двигателях и драйверах шаговых двигателей, интегрированных в TI, посетите страницу драйверов шаговых двигателей на сайте TI.