Содержание
Токи короткого замыкания от электродвигателей
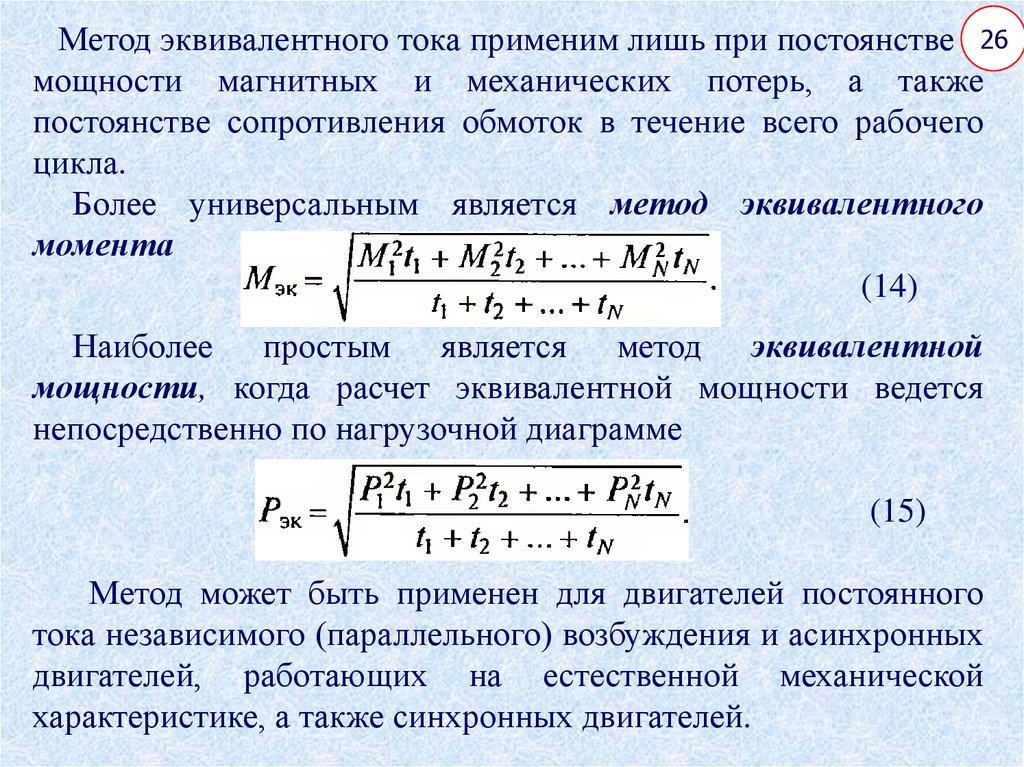
Общие указания
Увеличение тока в месте к. з. за счет подпитки от синхронных и асинхронных двигателей заметно проявляется в тех случаях, когда мощный двигатель (или группа двигателей) подключен в непосредственной близости к точке повреждения. Такие условия возникают в установках 3-6 кВ собственных нужд тепловых станций или на подстанциях предприятий с двигателями 6-10 кВ.
При внезапном трехфазном к. з. на зажимах двигателя или за малым внешним сопротивлением (например, за кабелем) за счет запасенной электромагнитной энергии двигатель посылает ток к месту повреждения. Этот ток в процессе к. з. у асинхронного двигателя спадает до нуля, а у синхронного — до установившегося значения, определяемого током возбуждения.
Подпитку от двигателей следует учитывать при проверке аппаратов и проводников РУ 3-10 кВ по условиям к. з., а также при расчете релейной защиты оборудования 3-10 кВ. Для указанных целей надо знать сверхпереходный ток двигателя
, ударный ток , периодическую и апериодическую составляющие тока в произвольный момент t переходного процесса и в момент отключения к. з. τ, т. е. .
з. τ, т. е. .
Общее выражение для периодической составляющей тока асинхронного двигателя спустя время t после начала к. з. имеет вид
где I» — сверхпереходный ток; I‘ — переходный ток; T» и T‘ — постоянные времени затухания сверхпереходного и переходного токов соответственно.
Периодический ток синхронного двигателя содержит установившийся ток
, поэтому для него выражение периодической составляющей будет иметь вид:
Учет двух составляющих свободного тока с постоянными Т» и T’ делает расчет периодического тока двигателя достаточно громоздким. Значения
с приемлемой для практических расчетов точностью можно получить, пользуясь упрощенной формулой, где вместо двух экспонент принята одна экспонента с расчетной постоянной времени (определение см. ниже).
Упрощенное выражение для периодической составляющей тока для асинхронного двигателя имеет вид
для синхронного двигателя
Апериодическую составляющую тока к. з. синхронного или асинхронного двигателя можно представить выражением
з. синхронного или асинхронного двигателя можно представить выражением
где
— постоянная времени апериодического тока.
Наибольший апериодический ток будет при начальном значении , равном
тогда
Приведенные выражения токов справедливы для единичного двигателя. В случае группы двигателей производят замену группы эквивалентным двигателем (см. ниже) и определяют все расчетные токи (
) от группы двигателей как токи от единичного эквивалентного двигателя.
Сверхпереходный ток двигателя
Сверхпереходный ток — это действующее значение периодической составляющей тока в начальный момент к. з. Подставив t=0 в общее выражение тока
найдем:
Ток I» определяют как:
где Е» — сверхпереходная э. д. с. двигателя; х» — сверхпереходное индуктивное сопротивление.
Значение Е» зависит от параметров двигателя и его загрузки до к. з.; его можно найти приближенно по соотношению
з.; его можно найти приближенно по соотношению
где
— напряжение, ток и фазовый угол двигателя в нагрузочном режиме.
Знак «-» соответствует асинхронному двигателю и недовозбужденному синхронному, знак «+»- перевозбужденному синхронному двигателю. При отсутствии исходных данных можно принимать Е»=0,9 для асинхронного двигателя и Е» = 1,1 для синхронного.
Сверхпереходное индуктивное сопротивление х» для асинхронного двигателя в каталоге обычно не приводится, поэтому сверхпереходный ток его определяют по кратности пускового тока :
Для синхронного двигателя и асинхронного двигателя типа ВДД следует принимать
Ударный ток двигателя
Общее выражение ударного тока для двигателя то же, что и для генератора (см. раздел):
Так как постоянные времени затухания периодической и апериодической составляющих тока у двигателя близки друг к другу, то при определении
следует учитывать затухание обеих составляющих, т. е.
е.
где
— действующее значение периодического тока при t=0,01 с, — апериодический ток при t=0,01 с.
Используя приведенную выше упрощенную формулу для тока , получим следующее выражение для ударного коэффициента:
Средние значения
и для разных серий асинхронных двигателей даны в табл. 38-8.
Ударный коэффициент можно приближенно определить по рис. 38-41, где дана зависимость от номинальной мощности асинхронного двигателя.
Для синхронных двигателей ударный коэффициент обычно лежит в пределах 1,75-1,9, причем верхнее значение относится к наиболее мощным двигателям (по 10-12 МВт в единице).
| Таблица 38-8 Средние значения постоянных еренени для серий асинхронных двигателей | ||
|---|---|---|
| Серии асинхронных двигателей | Расчетные постоянные времени, с | |
| АО | 0,04 | 0,028 |
| ДАЗО | 0,1 | 0,01 |
| А | 0,04 | 0,04 |
| АТД | 0,0006/Sн | 0,058 |
| ATM | 0,075 | 0,043 |
| ВДД | 0,06 | 0,07 |
| ДВДА | 0,07 | 0,04 |
| ДАМСО | 0,044 | 0,035 |
Рис.
 38-41.
38-41.
Значения ударного коэффициента для асинхронных двигателей
Токи двигателя в переходном процессе короткого замыкания. Ток к моменту отключения короткого замыкания
При расчете тока к.з. от двигателей для проверки аппаратов РУ или выбора релейной защиты периодическую составляющую тока от асинхронного двигателя можно определить по упрощенному выражению
где
— расчетная постоянная времени периодического тока; — сверхпереходное индуктивное сопротивление, определяемое по кратности пускового тока; — активное сопротивление ротора при номинальном скольжении, приведенное к статору.
Апериодические составляющие тока синхронного и асинхронного двигателя при наибольшем ее начальном значении определяют по выражению
где
постоянная времени апериодического тока; — активное сопротивление статорной цепи, включая внешнее сопротивление до точки к. з.
При отсутствии точных параметров значения и для асинхронного двигателя следует принимать по табл. 38-8.
38-8.
Упрощенное выражение для периодической составляющей тока синхронного двигателя без учета форсйровки возбуждения имеет вид
где
— сверхпереходный ток двигателя; — установившийся ток двигателя.
Синхронная э. д. с. примерно пропорциональна току возбуждения в предшествующем режиме:
Для определения периодического и апериодического токов двигателя к моменту отключения к. з. в выражениях токов
и следует подставить t=τ — расчетное время отключения.
Периодический ток двигателя к моменту отключения:
— асинхронный двигатель;
-синхронный двигатель.
Апериодический ток двигателя к моменту отключения
Ток короткого замыкания от группы двигателей
На некоторых установках к шинам 3-10 кВ подключен ряд двигателей, в общем случае различных по типу и мощности. При оценке результирующего влияния всех двигателей на ток к. з. в месте повреждения целесообразно все двигатели или отдельные группы их заменить одним эквивалентным двигателем. При эквивалентировании должны быть выполнены условия; периодическая и апериодическая составляющие тока в момент t переходного процесса от группы двигателей и от эквивалентного двигателя должны быть равны друг другу с допустимой погрешностью. При малой продолжительности к. з. (до 0,2 с) можно эквивалентировать совместно группу из синхронных и асинхронных двигателей. В этом случае условия эквивалентирования группы из n двигателей будут:
При эквивалентировании должны быть выполнены условия; периодическая и апериодическая составляющие тока в момент t переходного процесса от группы двигателей и от эквивалентного двигателя должны быть равны друг другу с допустимой погрешностью. При малой продолжительности к. з. (до 0,2 с) можно эквивалентировать совместно группу из синхронных и асинхронных двигателей. В этом случае условия эквивалентирования группы из n двигателей будут:
Сверхпереходный ток эквивалентного двигателя
определяют как сумму сверхпереходных токов отдельных двигателей:
Постоянные времени
и эквивалентного двигателя следует определять как средневзвешенные величины в зависимости от сверхпереходных токов отдельных двигателей:
Периодическая и апериодическая составляющие тока к. з. от группы двигателей (или эквивалентного двигателя) равны:
При продолжительности к. з. более 0,2 с синхронные двигатели следует учитывать отдельно.
Учет токов короткого замыкания двигателей в установках собственных нужд 3-6 кВ тепловых электростанций
При выборе аппаратов и кабелей сети 3- 6 кВ собственных нужд тепловых станций с мощными блоками следует учитывать подпитку от двигателей с. н. 3-6 кВ. При определенной мощности генератора и пылеугольном топливе состав двигателей с. н. блока примерно одинаков. Это позволяет упростить учет токов к. з. от двигателей с. н.
Использованием изложенного выше метода эквивалентирования двигателей получены параметры эквивалентного двигателя, заменяющего группу двигателей, подключенных к секции с. н. одного блока. Если секция получает питание от трансформатора с расщепленной обмоткой, то учитываются двигатели одной .полусекции, связанные электрически.
В табл. 38-9 приведены параметры эквивалентного двигателя для с. н. блоков 100- 300 МВт. Даны значения ударного коэффициента
и коэффициентов и , характеризующие периодический и апериодический токи двигателя к моменту отключения к. з.
з.
Время отключения принято τ=0,1 с. Суммарная номинальная мощность двигателей и суммарный номинальный ток должны быть известны для конкретной станции. При отсутствии точных данных можно принимать номинальную мощность двигателей с. н. 6 кв блока равной 6-8% мощности блока.
По данным табл. 38-9 ток к. з. от двигателей с. н. секции блока определяют следующим образом.
Сверхпереходный ток
где
— сумма, номинальных токов двигателей с. н. секции.
Ударный ток
Ток к моменту отключения при t=0,1 с (выключатели ВМП-10, ВМГ-133, ВЭМ-6): периодическая составляющая
апериодическая составляющая
| Таблица 38-9 Характеристика группы двигателей собственных нужд блока с турбогенератором | ||||||
|---|---|---|---|---|---|---|
| Рн блока, МВт | ||||||
| 100 150 200 300 | 5,7 — 5,8 5,5 | 0,08 0,08 0,09 0,05 | 0,04 0,03 0,035 — | 1,65 1,59 1,65 — | 0,29 0,29 0,33 0,14 | 0,08 0,04 0,06 — |
Редукторы, мотор-редукторы: ООО «Приводные технологии»
+7 (495) 369- 04- 89
+7 (910) 726- 725- 4
+375 (17) 272- 04- 08
+375 (29) 61- 787- 61
info@tech-privod. com
com
Редукторы, мотор-редукторы, редукторные механизмы:
червячные редукторы, цилиндрические редукторы, конические редукторы,
планетарные редукторы. Бытовая и промышленная приводная техника:
мини редукторы, электродвигатели, двигатели постоянного тока, DC моторы,
шаговые двигатели, устройства плавного пуска, частотные преобразователи.
Вариаторы, мотор-барабаны, редукторы для смесителей, сервоприводы.
| о компании | |||||||||
Приводные Технологии — развивающаяся компания малого бизнеса, основным видом деятельности которой является производство, маркетинг и промоушинг, бытовой и промышленной, доступной и надежной приводной техники. Интеграция новейших технологий современного редукторостроения к отечественным условиям производства, — особенность наших технических решений, предлагаемых рынку. Современные запросы приводов стали более требовательны к механической передаточной части, к подводимому электрическому оборудованию, к последующим приводным муфтам и др. | |||||||||
|
| ||||||||
 Наши предложения редукторных мини-моторов, редукторных узлов и силовых передаточных машин предназначены для эксплуатации в разных отраслях, для достижения различных целей, с любым набором требований и т.д. Помимо всего этого, имеется широкий выбор электрических устройств для оперативного контроля и регулирования режимов работы привода, — так называемая, область приводной электроники. подробнее
Наши предложения редукторных мини-моторов, редукторных узлов и силовых передаточных машин предназначены для эксплуатации в разных отраслях, для достижения различных целей, с любым набором требований и т.д. Помимо всего этого, имеется широкий выбор электрических устройств для оперативного контроля и регулирования режимов работы привода, — так называемая, область приводной электроники. подробнее Представляем продукцию одного из … подробнее
Представляем продукцию одного из … подробнее .. 90 об/мин
.. 90 об/мин 5T
5T* Копирование информации с сайта запрещено законом об авторском праве.
© 2022
Приводные технологии
Российская Федерация
+7 (495) 369-04-89
+7 (910) 726-725-4 (МТС) Смоленск
Республика Беларусь
+375 17 272-04-08 (т/ф) Минск
+375 29 61-787-61 (Velcom) Минск
tech-privod.com
Сайт работает на платформе Nestorclub.com
Рассчитать потребление тока двигателем
спросил
Изменено
2 года, 7 месяцев назад
Просмотрено
508 раз
\$\начало группы\$
У меня следующая проблема:
МОЯ ПОПЫТКА
Хорошо на этом сайте, https://www. jcalc.net/motor-current-calculator, я нашел формулу для тока двигателя при полной нагрузке и 3-х фазном питании:
jcalc.net/motor-current-calculator, я нашел формулу для тока двигателя при полной нагрузке и 3-х фазном питании:
\ $I=\frac{P\cdot 1000}{\sqrt{3}\cdot V\cdot pf \cdot \eta} \$, где \$ P\$ — номинальная мощность двигателя, \$ V\$ — напряжение , \$pf \$ — коэффициент мощности, \$\eta \$ — КПД. Подставив мои значения в уравнение, мы получим:
\$I=\frac{P\cdot 1000}{\sqrt{3}\cdot V\cdot pf \cdot \eta} =\frac{12\text{кВт} \cdot 1000}{\sqrt{3} \cdot 220 \text{V} \cdot 0,89\cdot 0.87}=40.67 \text{A}\$
Это кажется ОЧЕНЬ большим током, и это заставило меня усомниться в своем ответе.
Правильно ли я использовал формулу и правильно ли использовал информацию — на данный момент я не использую тот факт, что есть промах \$5\%\$. Я надеюсь, что кто-то может помочь мне с этим.
- ток
- асинхронный двигатель
- домашнее задание
\$\конечная группа\$
\$\начало группы\$
Ваш расчет верен. Ваше использование междуфазного напряжения и деления на квадратный корень из 3 решает пофазный аспект проблемы. Вы, вероятно, можете найти двигатели такого размера, которые имеют немного более высокий КПД и немного лучший коэффициент мощности, но этот ток примерно типичен для трехфазного двигателя такого размера.
Ваше использование междуфазного напряжения и деления на квадратный корень из 3 решает пофазный аспект проблемы. Вы, вероятно, можете найти двигатели такого размера, которые имеют немного более высокий КПД и немного лучший коэффициент мощности, но этот ток примерно типичен для трехфазного двигателя такого размера.
Скольжение не нужно, но это намек на то, что этот мотор не так эффективен, как можно было ожидать. Типичное скольжение для трехфазного двигателя составляет от 2% до 3%. Скольжение прямо пропорционально мощности, теряемой на сопротивлении ротора. Еще один намек на КПД и коэффициент мощности — это количество полюсов двигателя. 4-полюсные двигатели обычно имеют самый высокий КПД и коэффициент мощности. Двигатели с более чем 6 полюсами обычно имеют значительно более низкий коэффициент мощности.
\$\конечная группа\$
6
\$\начало группы\$
Мощность на фазу 4 кВт. Фазное напряжение \$220/\sqrt3\$ = 127 вольт. Проще говоря, это означает, что фазный ток: —
Фазное напряжение \$220/\sqrt3\$ = 127 вольт. Проще говоря, это означает, что фазный ток: —
$$\dfrac{4000}{127} = 31,5 \text{ ампер}$$
Таким образом, это будет больше, чем с учетом коэффициента мощности и эффективности. .
Как коэффициент мощности, так и КПД преобразуют реальную мощность 4 кВт в полную мощность: —
$$\dfrac{4000}{0,87 \times 0,89} = 5166\text{ VA}$$
Итак, подставив это обратно в первое уравнение, мы получим ток 40,67 ампер.
\$\конечная группа\$
3
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
Как рассчитать число оборотов двигателя
При эксплуатации, мониторинге, ремонте или замене двигателя важно понимать его технические характеристики. Одним из важных измерений является число оборотов в минуту или RPM, которое описывает скорость двигателя. В этом руководстве мы обсудим, как рассчитать число оборотов двигателя и почему это так важно.
Одним из важных измерений является число оборотов в минуту или RPM, которое описывает скорость двигателя. В этом руководстве мы обсудим, как рассчитать число оборотов двигателя и почему это так важно.
Что такое число оборотов двигателя?
Об/мин — это единица измерения, используемая для описания скорости двигателя. Он обозначает количество оборотов в минуту и описывает скорость, с которой вращается ротор, то есть количество раз, которое вал ротора совершает полный оборот в минуту. Его можно использовать для измерения скорости двигателей, турбин, центрифуг, конвейеров и другого оборудования.
Почему важно рассчитывать число оборотов в минуту
Расчет числа оборотов двигателя, а также другие измерения, такие как крутящий момент, напряжение и мощность, необходимы при выборе двигателя для конкретного применения. Расчет скорости двигателя может помочь вам выбрать правильный тип двигателя при замене компонентов и принять более взвешенные решения по ремонту. Вам также необходимо понимать число оборотов в минуту, чтобы эффективно контролировать и контролировать работу двигателя.
Вам также необходимо понимать число оборотов в минуту, чтобы эффективно контролировать и контролировать работу двигателя.
Запросить цену
Скорости асинхронного двигателя переменного тока
Двигатели переменного тока предназначены для работы на определенных скоростях. Эти скорости одинаковы даже для разных моделей и производителей. Скорость данного двигателя зависит от частоты сети источника питания, а не от напряжения, а также от количества полюсов, которые он имеет. Двигатели переменного тока часто имеют два или четыре полюса, но могут иметь и больше. Связь между полюсами и числом оборотов двигателя связана с магнитным полем, создаваемым полюсами статора. Это поле приводит к созданию магнитных полей в роторе, которые связаны с частотой поля в статоре.
Также необходимо учитывать скольжение, которое представляет собой разницу между синхронной скоростью статора и фактической рабочей скоростью. Ротор всегда вращается немного медленнее, чем магнитное поле статора, и всегда пытается «догнать» его, что создает крутящий момент, необходимый для запуска двигателя.
Чтобы отрегулировать скорость трехфазного двигателя переменного тока, вы можете отрегулировать частоту источника питания двигателя переменного тока с помощью элемента управления. Многие устройства управления переменным током также имеют однофазный вход, что позволяет запускать трехфазные двигатели, даже если у вас нет трехфазного питания. С другой стороны, большинство однофазных двигателей переменного тока не регулируются, поскольку они подключаются непосредственно к стандартной розетке и используют доступную частоту.
Скорость двигателя постоянного тока
Как и асинхронные двигатели переменного тока, двигатели постоянного тока с постоянными магнитами также имеют полюса, но полюса не влияют на скорость, как у двигателей переменного тока. На скорость двигателей постоянного тока влияет несколько других факторов, в том числе рабочее напряжение двигателя, сила магнитов и количество витков провода в якоре. Двигатели постоянного тока могут работать только на скоростях, номинальных для доступного для них напряжения.
Если батарея, от которой работает двигатель, начинает разряжаться и подавать меньшее напряжение, скорость двигателя снижается. Если вы подключите двигатель к источнику питания, скорость увеличится, хотя это может вызвать дополнительный износ двигателя. Вы также можете использовать элементы управления для регулировки скорости двигателя постоянного тока, который работает путем изменения напряжения, доступного для двигателя.
Услуги по ремонту двигателей переменного/постоянного тока
Как рассчитать число оборотов двигателя
Чтобы рассчитать число оборотов асинхронного двигателя переменного тока, вы умножаете частоту в герцах (Гц) на 60 — — для количества секунд в минуте — на два для отрицательные и положительные импульсы в цикле. Затем вы делите на количество полюсов двигателя:
- (Гц x 60 x 2) / количество полюсов = об/мин без нагрузки
Вы также можете вычислить рейтинг проскальзывания, вычитая номинальную скорость при полной нагрузке из синхронной скорости, разделив результат на синхронную скорость и умножив его на 100:
- ((синхронная скорость – номинальная скорость при полной нагрузке) / (синхронная скорость)) x 100 = рейтинг скольжения
Затем, чтобы найти число оборотов при полной нагрузке, вы конвертируете показатель скольжения в число оборотов в минуту, а затем вычитаете его из числа оборотов без нагрузки:
- Для расчета оборотов при полной нагрузке: об/мин – проскальзывание оборотов = об/мин при полной нагрузке
Скорость вращения двигателя постоянного тока зависит от напряжения, подаваемого на двигатель. Как правило, производитель двигателя сообщает вам число оборотов в минуту, которое вы можете ожидать при различных напряжениях. Чтобы достичь желаемых оборотов, вы можете отрегулировать напряжение в соответствии с рекомендациями.
Как правило, производитель двигателя сообщает вам число оборотов в минуту, которое вы можете ожидать при различных напряжениях. Чтобы достичь желаемых оборотов, вы можете отрегулировать напряжение в соответствии с рекомендациями.
Примеры расчета формулы оборотов двигателя
Давайте рассмотрим некоторые примеры формулы оборотов. Для двигателя переменного тока число полюсов и частота определяют число оборотов холостого хода. Для системы с частотой 60 Гц с четырьмя полюсами уравнение оборотов будет следующим:
- (Гц x 60 x 2) / количество полюсов = число оборотов без нагрузки
- (60 х 60 х 2) / 4
- 7 200 / 4 = 1 800 об/мин
Величина скольжения незначительно зависит от конструкции двигателя. Разумная скорость при полной нагрузке для четырехполюсного двигателя с частотой 60 Гц составляет 1725 об/мин. Скольжение – это разница между скоростью без нагрузки и скоростью с полной нагрузкой. В данном случае это будет:
- Обороты при полной нагрузке – Обороты без нагрузки = проскальзывание оборотов
- 1800 – 1725 = 75 об/мин
При частоте 60 Гц двухполюсный двигатель работает со скоростью 3600 об/мин без нагрузки и около 3450 об/мин с нагрузкой:
- (Гц x 60 x 2) / число полюсов = об/мин без нагрузки
- (60 х 60 х 2) / 4
- 7 200 / 2 = 3 600 об/мин
При частоте 60 Гц двигатель с шестью полюсами будет работать со скоростью 1200 об/мин без нагрузки и приблизительно со скоростью 1175 об/мин с нагрузкой.