Содержание
Шагового двигателя 3D-принтера в Украине. Цены на Шагового двигателя 3D-принтера на Prom.ua
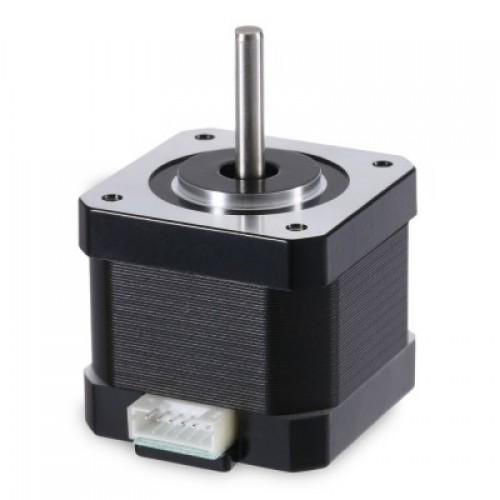
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер DL
Доставка по Украине
909.48 грн
454.74 грн
Купить
Интернет-магазин Delery
Шаговый двигатель NEMA23 2.8A 23HS5628-8.0, 3D-принтер DL
Доставка по Украине
2 052.16 грн
1 026.08 грн
Купить
Интернет-магазин Delery
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер DL
Доставка по Украине
909.48 грн
454.74 грн
Купить
Интернет-магазин Delery
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер SP
Доставка по Украине
937.46 грн
468.73 грн
Купить
Shoppes
Шаговый двигатель NEMA23 2.8A 23HS5628-8.0, 3D-принтер SP
Доставка по Украине
2 080.14 грн
1 040.07 грн
Купить
Shoppes
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер SP
Доставка по Украине
937.46 грн
468. 73 грн
73 грн
Купить
Shoppes
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер DS
Доставка по Украине
916.48 грн
458.24 грн
Купить
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер DS
Доставка по Украине
916.48 грн
458.24 грн
Купить
Шаговый двигатель NEMA23 2.8A 23HS5628-8.0, 3D-принтер DS
Доставка по Украине
2 059.16 грн
1 029.58 грн
Купить
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер CT
Доставка по Украине
937.46 грн
468.73 грн
Купить
Интернет-магазин Carty
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер CT
Доставка по Украине
937.46 грн
468.73 грн
Купить
Интернет-магазин Carty
Шаговый двигатель NEMA23 2.8A 23HS5628-8.0, 3D-принтер CT
Доставка по Украине
2 080.14 грн
1 040.07 грн
Купить
Интернет-магазин Carty
Гибкая муфта 5×5мм шагового двигателя 3D-принтера DL
Доставка по Украине
198. 22 грн
22 грн
99.11 грн
Купить
Интернет-магазин Delery
Гибкая муфта 5×5мм шагового двигателя 3D-принтера SP
Доставка по Украине
226.20 грн
113.10 грн
Купить
Shoppes
Гибкая муфта 5×5мм шагового двигателя 3D-принтера DS
Доставка по Украине
205.22 грн
102.61 грн
Купить
Смотрите также
Кронштейн угловой, крепление шагового двигателя NEMA17 42мм 3D-принтера DL
Доставка по Украине
373.12 грн
186.56 грн
Купить
Интернет-магазин Delery
Кронштейн угловой, крепление шагового двигателя NEMA17 42мм 3D-принтера SP
Доставка по Украине
401.10 грн
200.55 грн
Купить
Shoppes
Шаговый двигатель NEMA23 2.8A 23HS5628-8.0, 3D-принтер
На складе в г. Ровно
Доставка по Украине
845 — 1 323 грн
от 2 продавцов
845 грн
Купить
Магазин «Freedelivery»
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер
На складе в г.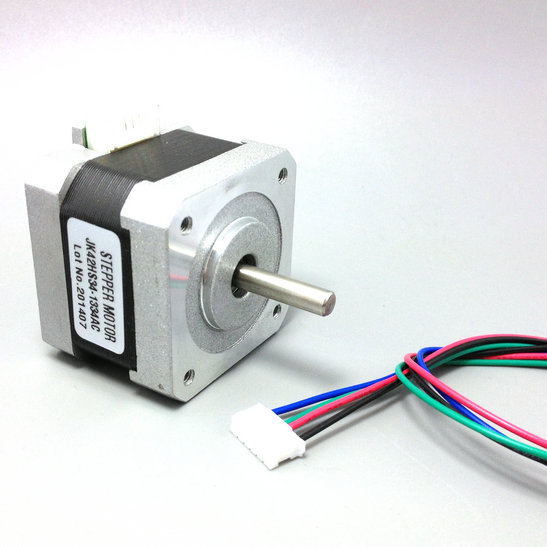 Ровно
Ровно
Доставка по Украине
355 — 637 грн
от 2 продавцов
355 грн
Купить
Магазин «Freedelivery»
Кронштейн угловой, крепление шагового двигателя NEMA17 42мм 3D-принтера DS
Доставка по Украине
380.12 грн
190.06 грн
Купить
Гибкая муфта 5×5мм шагового двигателя 3D-принтера CT
Доставка по Украине
226.20 грн
113.10 грн
Купить
Интернет-магазин Carty
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер
На складе в г. Ровно
Доставка по Украине
355 — 497 грн
от 4 продавцов
355 грн
Купить
Saga Market
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер
На складе
Доставка по Украине
по 355 грн
от 10 продавцов
355 грн
Купить
АльтМаркет — интернет магазин
Шаговый двигатель NEMA17 1.7A 17HS4401, 3D-принтер
На складе
Доставка по Украине
355 — 399 грн
от 9 продавцов
742 грн
371 грн
Купить
GoodStore | Подарки, Товары для дома и работы
Шаговый двигатель NEMA17 1. 7A 17HS4401, 3D-принтер
7A 17HS4401, 3D-принтер
На складе в г. Ровно
Доставка по Украине
355 — 394 грн
от 7 продавцов
355 грн
Купить
Чипест
Кронштейн угловой, крепление шагового двигателя NEMA17 42мм 3D-принтера CT
Доставка по Украине
401.10 грн
200.55 грн
Купить
Интернет-магазин Carty
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер
На складе
Доставка по Украине
355 грн
Купить
KRONS интернет- магазин
Шаговый двигатель NEMA17 0.7A 17HS4023, 3D-принтер, 105868
На складе в г. Ровно
Доставка по Украине
355 грн
Купить
Интернет магазин » Горячий Стиль «
Шаговый двигатель NEMA23 2.8A 23HS5628-8.0, 3D-принтер, 105869
На складе в г. Ровно
Доставка по Украине
845 грн
Купить
Интернет магазин » Горячий Стиль «
Какой шаговый двигатель использовать в нагретой камере
printer-building
chamber
Я хочу построить 3D-принтер с нагревательной камерой около 90 °C и площадью сборки 200х200х200 мм. Я никогда не строил систему CoreXY, поэтому в настоящее время моя конструкция представляет собой систему XY с движущимся двигателем X (установленным на Y). Поскольку у него есть нагревательная камера, я не могу использовать обычный шаговый двигатель (есть способ, но я должен обеспечить принудительное воздушное охлаждение, как НАСА, или водяное охлаждение). Экструдер-это тип Боудена. Я уже закупил почти все компоненты, но застрял в выборе двигателя.
Я никогда не строил систему CoreXY, поэтому в настоящее время моя конструкция представляет собой систему XY с движущимся двигателем X (установленным на Y). Поскольку у него есть нагревательная камера, я не могу использовать обычный шаговый двигатель (есть способ, но я должен обеспечить принудительное воздушное охлаждение, как НАСА, или водяное охлаждение). Экструдер-это тип Боудена. Я уже закупил почти все компоненты, но застрял в выборе двигателя.
Я мог бы найти высокотемпературный шаговый двигатель в Индии (вот откуда я родом), но он стоит слишком дорого. Я нашел один на сайтеVisionminer , они дилеры для принтеров Intamsys, у которых есть камера 90 °C, и они также обеспечивают замену шаговых двигателей.
Если сравнить стоимость, то мотор, который я нашел в Индии, стоит в три раза дороже, чем выше. Даже с доставкой я много сэкономлю. Но одна проблема заключается в том, что они не предоставляют никаких подробностей о крутящем моменте и номинальном токе. На сайте есть одно изображение,и оно гласит:
MOONS STEPPING MOTOR TYPE 17HDB001-11N 60904162 18/04/12
Я подумал, что это может быть ЛУННЫЙ двигатель, поэтому связался с ними, но ответа пока не последовало.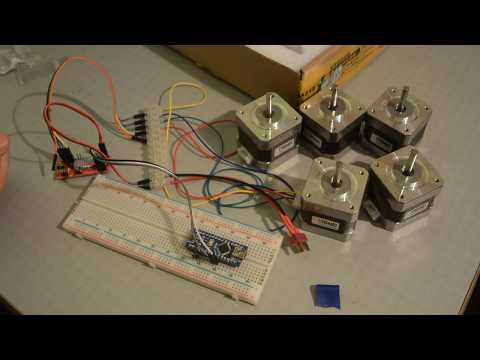 Я попытался найти двигатель по номеру детали, но безуспешно. Я тоже попробовал написать по почте Visionminer.
Я попытался найти двигатель по номеру детали, но безуспешно. Я тоже попробовал написать по почте Visionminer.
Кто-нибудь знает, что это за мотор? или знаете какие-нибудь высокотемпературные двигатели?
Также они используют затворные ремни, которые рассчитаны на температуру 85 °C. Насколько он будет надежен через 90 лет Камера °C?
@Athul, 👍2
Обсуждение
7 ответов
▲ 1
«Поскольку в нем есть нагревательная камера, я не могу использовать обычный шаговый двигатель», Конечно, вы можете, внутри не будет так тепло, если вы действительно не закроете его плотно, а это на самом деле не нужно. У меня есть корпус вокруг моего MIGBOT 200x200x200 мм (ранний клон Prusa с экструдером с прямым приводом), печатающий PLA с рабочим столом 60 °C, интерьер становится только на несколько градусов теплее. Двигатели могут потреблять гораздо больше тепла, чем вы думаете.
У меня есть пара фотографий в этой теме.
Передняя и задняя панели выполнены из поликарбоната 18×24 дюйма от Home Depot, я 3D напечатал угловые кронштейны и добавил пару кусков дерева для некоторой жесткости. Вся передняя часть закрывается на петли. Верхняя часть имеет размер 24×24 дюйма, а задняя 6″ шарнирно поднимается для доступа к SD-карте, которая находится на дисплее/панели управления.
,
@CrossRoads
▲ -2
Вам не нужно беспокоиться о ступенчатой камере нагрева, так как в прямом приводе используется вентилятор для охлаждения моторной зоны.
Когда я начал делать свой собственный принтер, у меня был тот же вопрос, но для того, чтобы мне было хорошо и спокойно. Я предпочитаю использовать экструдер для баудера.
Этот экструдер bowden поставляется в разных размерах: обычный, как показано на рисунке выше, маленький и мини -, как и другие, которые показаны предварительно собранными ниже.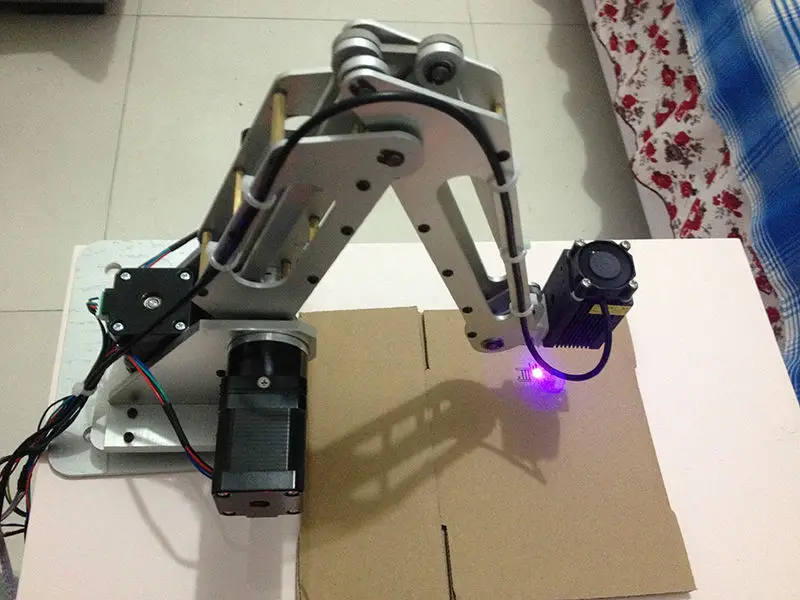
Однако вопрос должен быть другим, например, могу ли я печатать в духовке? для этого рассмотрим вопрос о других возможностях:
1.- Накройте или защитите двигатель фольгой, чтобы избежать нагрева.
2.- Добавьте водяное охлаждение, такое как процессор, чтобы вода стекала снаружи к двигателю, чтобы поддерживать низкую температуру.
3.- Добавьте охлаждающие вентиляторы, эти должны принимать воздух снаружи, и воздух может направляться гофрированной трубкой для двигателя экструдера и радиатора. Для двигателей X, Y и Z может быть установлена жесткая трубка.
Эти вентиляторы охлаждения не повлияют на температуру внутренней камеры из — за того, что процесс охлаждения является пунктуальным.
4.- Многие электронные компоненты рассчитаны на работу при температуре 105°, поэтому в короткие сроки это не повлияет, однако срок службы конструкции значительно сократится, так как при нормальных условиях она составляет до 5 лет, поэтому ваш принтер может работать до 1,5 лет.
Рекомендации:
Я не вижу реальной причины держать принтер изолированным от высоких температур, в то время как основная задача заключается в том, чтобы не допускать температурных колебаний в таких климатических условиях, как зима и лето. В моем случае типография имеет нормальную температуру 38°C летом и -2°C зимой, поэтому как я могу печатать с тем же качеством зимой, если принтер такой холодный? ах, мне нужна камера, чтобы поддерживать такую летнюю температуру. затем я сделал камеру такой, чтобы она достигала 38°C, а не всей температуры отпечатка на столе.
Если мне нужно распечатать ABS, поэтому я установил температуру стола на 80°C, чтобы детали не деформировались, из-за правильной температуры клея для ABS; кроме того, эта температура не будет перегревать камеру по крайней мере до 60°C, но ее можно уменьшить, экстрагируя тепло другим вентилятором. Для этого случая достаточно всего лишь одного или двух вентиляторов.
Примечание:
Идея поместить весь принтер в духовку поможет держать под контролем температуру 80°-95°C-это хорошо, но иногда ее трудно реализовать из-за материалов и других целей, а срок службы будет слишком низким.
Поэтому ваша камера должна включать только область печати или следовать рекомендациям, как показано на рисунке выше. Эти фотографии были взяты с сайта industrial RepRap, а также демонстрируют некоторые особенности, как я предлагаю.
,
@Fernando Baltazar
▲ 0
Для шагового двигателя важны две вещи: температура изоляции и точка Кюри магнита.
Вы, вероятно, не приближаетесь к точке Кюри.
Критическая температура-это сумма температуры окружающей среды плюс повышение температуры от мощности привода. В вашем случае я бы попытался установить двигатель на металлическую холодную пластину с водяным охлаждением. Поднесите к двигателю более низкую температуру. Установите полную поверхность двигателя на пластину с помощью термопластика.
Используйте крошечный насос, чтобы перемещать воду из резервуара через холодную плиту. Например, проверьте E3D Kracken.
,
@cmm
▲ 3
Альтернативой поиску степперов, которые могут выдержать жару, вы можете рассмотреть возможность не нагреваться рядом со степперами:
- Перемещение степперов за пределы отапливаемого объема сборки
С помощью 2 дополнительных шкивов на шаг, вы можете вывести шагатели за пределы объема сборки.

- Защитите двигатели от нагрева, поместив их в более прохладный туннель или за лицевой пластиной/крышкой
Вы также можете защитить степперы от нагрева, например, Ultimaker 3(E) степперы находятся за крышкой.
Имейте в виду, что при создании тепловой камеры с температурой 90 °C все печатные детали для CoreXY должны быть напечатаны в виде нити, способной выдерживать длительное воздействие температуры, которую вы хотите, чтобы камера была (или была изготовлена из металла). Для указанной температуры это подразумевает использование некоторых более экзотических типов нитей, см., например, этот ответ.
,
@0scar
▲ -1
Я просто скажу прямо. Если вы не можете спроектировать и построить базовую систему XY, то вам не следует даже пытаться создавать камеру с подогревом.
3D-принтеры Stratasys с обогреваемыми камерами используют дизайн H-Bot (предшественник CoreXY), чтобы все не попадало в камеру. Вы не можете использовать обычный hotend. У вас не может быть вентиляторов на этом хотэнде, чтобы сохранить его прохладным. Вы не можете иметь двигатели внутри камеры. Вы едва можете держать нить накала в камере, потому что она может размякнуть внутри трубки.
Вы не можете использовать обычный hotend. У вас не может быть вентиляторов на этом хотэнде, чтобы сохранить его прохладным. Вы не можете иметь двигатели внутри камеры. Вы едва можете держать нить накала в камере, потому что она может размякнуть внутри трубки.
В некоторых ответах говорится, что двигатели уже могут работать при высоких температурах. Это верно только в условиях окружающей среды. Тепло, которое генерируют катушки двигателя, пытается вырваться наружу из двигателя. Внутри стало намного жарче! Поэтому, если вы повысите температуру внешней среды до 90, тепло не уйдет так быстро; и если оно поднимется выше температуры плавления/горения, двигатель выйдет из строя.
https://en.wikipedia.org/wiki/Magnet_wire
https://electronics.stackexchange.com/questions/211986/burning-temperature-of-copper-winding-of-motor
После этого выходит из строя ПВХ-покрытие на подводящих проводах выйдет из строя, обычно прибегая к коротким, что может привести к разрушению шаговых драйверов.
Кроме того, все, что сделано из металла, будет расширяться. Шарикоподшипники будут расширяться, рельсы будут расширяться, а хотэнд будет расширяться. Линейная система может стать более жесткой или ослабленной; она может даже деформироваться в зависимости от типа стали. Если он станет более свободным, тогда исчезнет ваша способность к 3D-печати! В конечном итоге вам может потребоваться разработать и изготовить свои детали таким образом, чтобы они подходили и работали должным образом только тогда, когда они находятся в рабочем состоянии.
ПРАВКА: Вот что вам нужно построить:
AON-M2 : Высокотемпературный промышленный 3D-принтер
,
@user77232
▲ -2
Затем нужно добавить систему охлаждения воды для них.
Что-то вроде этого:
Кроме того, охлажденный водой hotend будет идти вперед, я думаю.
,
@Martynas
▲ 1
Можно купить дешевые высокотемпературные степперы. Например, можно купить LDO 180 °C намоточные степперы.
Например, можно купить LDO 180 °C намоточные степперы.
Их можно использовать до 135 °C без дополнительного охлаждения и с уменьшенным сроком службы, вероятно, еще выше.
,
@Peter Sorensen
Шаговые двигатели из принтера что может
Рейтинг статьи
Загрузка…
Эксперимент с шаговым двигателем Mitsumi от лазерного принтера.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Как-то раз достался мне (абсолютно безвозмездно) хладный труп лазерного принтера.
Принтер был разобран на органы, ценного и полезного для rep-rap-а в нем ничего не нашлось, кроме пожалуй шагового двигателя Mitsumi M49SP-1. Польза в котором сомнительная.
Погуглил, двигатель вроде достаточно мощный.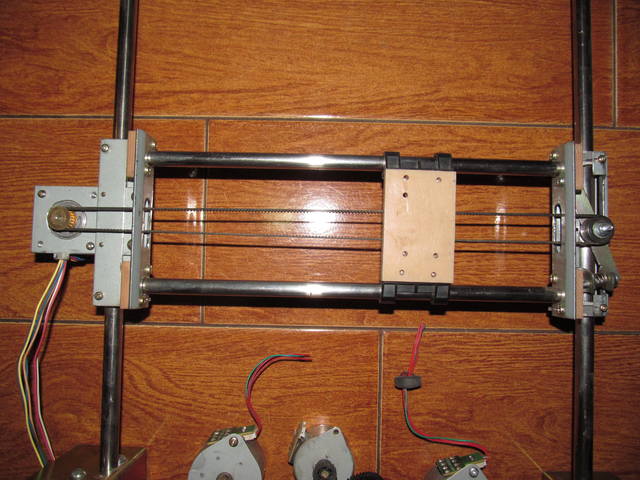 Один весомый минус — шаг в 7,5 градусов.
Один весомый минус — шаг в 7,5 градусов.
После раздумий куда его применить, пришла в голову мысль попробовать его в качестве привода экструдера принтера. В качестве эксперимента. Нормальные, обычные Nema17 шаговики у меня есть в некотором количестве,
но вот захотелось поэкспериментировать. Стало интересно, мысль овладела головой и руками.
Еще подумалось что микрошаг 32 ситуацию с шагом в 7,5 градусов слегка улучшит.
Спроектировал во FreeCAD-е и распечатал переходную пластину с закладными гайками м3 с этого мотора на nema17.
Родную шестерню не удалял, зубчики достаточно острые и по идее должны вполне цепляться за пруток.
Распечатанный экструдер у меня уже был, печатал остатками китайского пла.
С моим принтером пришел такой же, только литой. А модельку случайно нашел на тинге и распечатал в некотором количестве.
Собрал монстр-экструдер воедино.
Ножка из Леруа Мерлен на укосине.
А в катушку распечатал вот такие вставки и стопор.
Ток выставил экспериментально, чтоб мотор крутился и не пропускал шаги под нагрузкой.
Экспериментально определил количество шагов на 1см.
Тестовая печать прямоугольного столба в 2 стенки.
. дала вот такие занимательные артефакты.
Оно даже печатает, но при печати мотор разогрелся.
В общем для прямого привода моторчик явно не годится. 🙂
Надо попробовать собрать экструдер с редуктором или с ременной передачей.
Прекрасно понимаю что все это блажь и баловство, не заменит этот моторчик хорошо работающий nema17 17hs4401.
Подытожу: не каждый эксперимент удачный, зато в процессе приобретается бесценный опыт 🙂
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Станок с ЧПУ
Станок с ЧПУ (Числовым Программным Управлением) – станок, работа которого подчиняется заранее заданной программе. Благодаря этому для обработки детали не нужен человек. Нарисовал на компьютере детальку, установил в станок заготовку, нажал пуск и пошел пить чай. По возвращении достаешь готовую детальку из станка. Фантастика? Совсем нет, такой станочек можно сделать самостоятельно!
Благодаря этому для обработки детали не нужен человек. Нарисовал на компьютере детальку, установил в станок заготовку, нажал пуск и пошел пить чай. По возвращении достаешь готовую детальку из станка. Фантастика? Совсем нет, такой станочек можно сделать самостоятельно!
Оригинальная статья была опубликована на портале licrym.org Здесь публикуется с сокращениями. Как обычно — это единственный репост.
Текст приведенный ниже не будет содержать пошаговых инструкций – что как пилить и куда вставлять. Поняв концепцию и ориентируясь на те детали, что есть в наличии вы сможете собрать свой, уникальный вариант станка. Если есть возможность – можно купить готовый комплект для сборки, или заказать определенные узлы. Результат прямо зависит от аккуратности изготовления, количества промышленно изготовленных деталей и усидчивости.
Станок у нас будет с 3мя степенями свободы – поступательные движения по осям X, Y и Z. Рабочее поле прямо пропорционально длине направляющих, которые мы используем. Точность во многом будет зависеть от качества сборки.
Точность во многом будет зависеть от качества сборки.
Станок будет называться «Гефест».
Инструменты и материалы
При создании данного станка из инструмента использовались:
* Шуруповерт
* Лобзик
* Электроточило
* Резьбонарезной инструмент/напильники/надфили и прочая мелочь.
* Фанера
* алюминиевый уголок
* много всяких винтиков и гаечек
* Эпоксидный клей и эпоксилин
* Два шаговых моторчика протяжки бумаги от лазерных принтеров,
* Шаговый двигатель привода головки из матричного принтера
* Направляющие с бронзовыми подшипниками скольжения из матричных принтеров
* Метровая шпилька М10
Материалы закупаются в любом строительном магазине, детали вытаскиваются из старой техники.
Механика
Есть отличная статья где всё по полочкам расписано как надо бы делать станки.
Конструктивно была выбрана конструкция с жестким порталом, перемещающимся по оси X столом. Строгих требований к станку не предъявлялось – было просто интересно попробовать и не было желания тратить на эксперимент больших сумм денег. В итоге практически полностью станок был собран из того, что было в моих закромах.
В итоге практически полностью станок был собран из того, что было в моих закромах.
Направляющие были использованы из матричных принтеров, вместе с родными подшипниками скольжения. В качестве ходовых винтов – стальные строительные шпильки М10. Гайки на ходовых винтах – самые обыкновенные – шестигранные.
Если есть возможность – можно купить готовый координатный стол, например proxxon сразу исчезнет проблема с обеспечением точности.
По оси Z используется мебельная направляющая с шариками. В интернете видел станок полностью выполненный на таких мебельных направляющих.
Качество работы станка прямо зависит от точности изготовления. Шпильки, обточенные вручную на электроточиле дадут более худший результат, чем шпильки обточенные на токарном станке. В данном случае шпильки были обточены вручную, как выяснилось в итоге с небольшим нарушением соосности, что в конечном итоге привело к биениям.
Шпильки по оси X и Y упираются своими концами в шарикоподшипники, которые закреплены при помощи эпоксилина.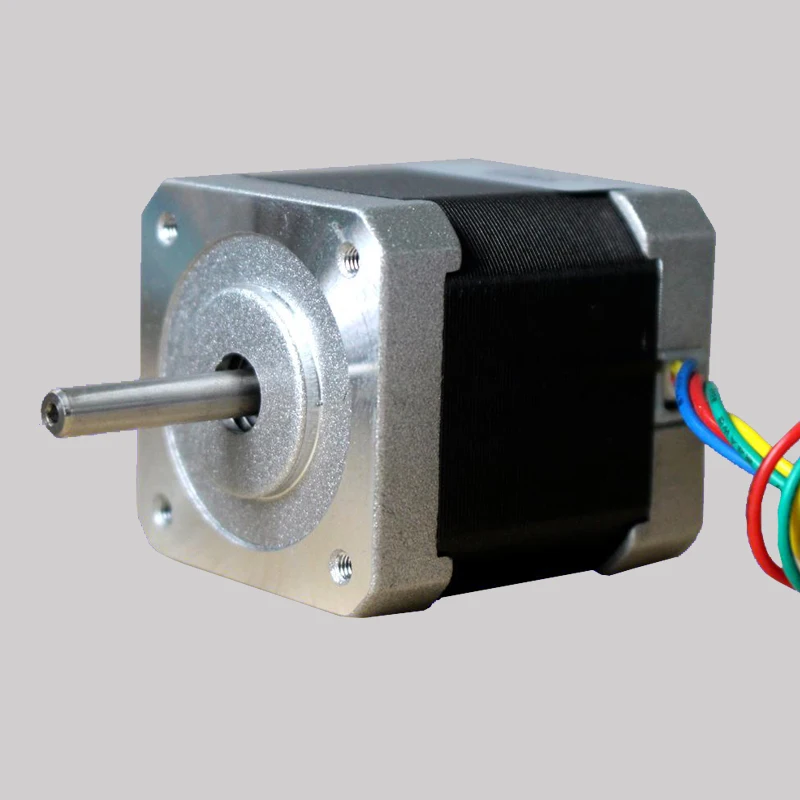 Вторым своим концом шпильки через муфты соединены с двигателями. Муфты выполнены из отрезка стальной трубочки с отверстиями под зажимающие винты. В качестве муфты можно использовать несколько слоев термоусадочной трубочки, дополнительно скрепленных нейлоновыми стяжками. При отсутствии сильного нагрева они могут дать приемлемый результат.
Вторым своим концом шпильки через муфты соединены с двигателями. Муфты выполнены из отрезка стальной трубочки с отверстиями под зажимающие винты. В качестве муфты можно использовать несколько слоев термоусадочной трубочки, дополнительно скрепленных нейлоновыми стяжками. При отсутствии сильного нагрева они могут дать приемлемый результат.
В связи с невозможностью изготовить все детали станка точно (а делалось всё вручную фактически на коленке) многие соединения выполнены на винтах, с последующей регулировкой. На фото станина станка и предварительно установленные направляющие с ходовыми винтами:
Стол с прикрепленным к нему приводом оси X:
После установки направляющих было необходимо выставить опоры с подшипниками скольжения так, что бы они не были перекошены и стол двигался по направляющим легко. После достаточно длинных танцев с надфилем этого удалось добиться и винты были затянуты.
Привод оси Y был сделан аналогичным образом:
Привод оси Z не имеет шарикоподшипника на конце винта.
В собранном состоянии детали станка должны перемещаться при вращении винта пальцами без значительных усилий. В противном случае мощности двигателя может просто не хватить на преодоление сил трения и деформации вследствие неточности станка.
В качестве шпинделя использована бормашинка proxxon. Можно закрепить любой достаточно мощный двигатель.
В качестве фрез можно использовать стоматологические буры, насадки для дремелей.
Двигатели
В качестве двигателей вполне подойдут шаговые двигатели от принтеров. Чем двигатель крупнее – тем лучше – бОльшую мощность от него можно получить. По оси X и Y установлены двигатели из привода бумаги лазерных принтеров, имеют 48 шагов на один оборот вала. По оси Z используется двигатель от привода головки матричного принтера с 200 шагов на один оборот вала. К сожалению, полную документацию на двигатели найти не удалось.
Электроника
Механика станка собрана, двигатели установлены. Теперь нам нужно сделать две вещи – это контроллер, который будет принимать сигналы от компьютера, и включать соотвествующие обмотки двигателей, и блок питания, который будет прокармливать всё это хозяйство.
Контроллер собран на базе микросхем L297 и L298 по следующей схеме.
Фото платы в сборе:
Это так называемый step/dir контроллер. Название говорит о том, что на вход подается для каждой из осей 2 сигнала: шаг (step) и направление (direction). Направление указывает – по часовой стрелке вращается двигатель или против. Каждый импульс step будет поворачивать вал двигателя ровно на один шаг.
Блок питания – простой трансформаторный, со сглаживающим конденсатором. Можно использовать компьютерный блок питания.
Контроллер вместе с блоком питания:
Контроллер подключается к компьютеру через LPT порт.
Программное обеспечение
Без программы станок всего лишь груда железа. Станки с ЧПУ обычно управляются G кодом, который стандартизирован. Прежде всего нам необходима программа, которая бы принимала на входе некоторую последовательность G команд и выдавала необходимые импульсы в LPT порт, к которому у нас подключен драйвер.
Примеры таких программ:
TurboCNC (работает под ДОС)
Mach4
KCAM
LinuxCNC
Я использовал программу Mach4, скриншот работы которой ниже:
В комплекте с Mach4 есть программа LazyCAM в которую был загружен dxf файл с картинкой, которая была превращена в набор управляющих G-кодов. Эти коды были отправлены в mach4 и запущена обработка.
Эти коды были отправлены в mach4 и запущена обработка.
Испытания
Испытания фломастером:
Вот процесс гравировки станком логотипа кафедры:
Отгравированное лого:
Как видим станок работает. На выполнение гравировки ушло порядка 15 минут. Из-за неточности обработки хвостов шпилек и неточности изготовления деталей есть биения, например видно волнистость линии на вершине елочки, шаг волнистости 1,5 мм как раз соответствует шагу резьбы.
Фактическая точность станка выходит порядка 0,5 мм. Максимальная скорость перемещения – 200 мм/мин. Рабочее поле 230*230 мм.
3D принтер Hercules Strong 2019
Характеристики:
- Толщина нити: 1,75
- Количество головок: 1
- Область построения (xyz)(см): 30 × 30 × 40
- Материал печати: PLA / ABS / HIPS / PVA / PETG / NYLON (PA) / FLEX / ABS/PC / AEROTEX / ASA / COPPERFILL / Carbon / POM / PP / Rubber / SANDFILL / SBS / TPU / Tough PLA / WAX3D / WOODFILL /
- Наличие LCD экрана: да
- Габариты: 48 x 52 x 80
- Вес: 48 кг
- Производитель: Imprinta
- Страна: Россия
- Технология печати: FDM
- Скорость перемещения: до 150 мм/с
- Описание
- Отзывы
3д принтера Hercules Strong 2019 – свежая модель принтера от российского производителя IMPRINTA.
Принтер оснащен одним экструдером с активным воздушным охлаждением. Имеет сопло с несколькими размерами: 0.5 мм, 0.2мм, 1.2мм. Экструдер нагревается до 280 градусов и печатает всеми стандартными материалами. Размер камеры печати — 300 * 300 * 400 мм, автоматически (программно) калибруется нулевая координата по Z плоскости рабочего стола. Стол покрывается съемным стеклом. Корпус у Hercules Strong 2019 закрытый с регулируемой принудительной вентиляцией. По оси Z толщина слоя составляет от 0,15 мм до 0,9 мм. Принтер оснащен системой контроля наличия и подачи пластика — Sensitive check. Управляется принтер через монохромный дисплей (русифицирован).
Принтер может похвастаться системой контроля наличия и подачи пластика — Sensitive check. Формат поддерживаемых катушек для внутреннего размещения — 65 х 200 мм, для размещения на моде — 115 х 300 мм. Интерфейс управления принтером реализован через монохромный дисплей (русифицирован). По XY установлены рельсовые направляющие 12 мм. Ось Z — валы прецизионные, диаметром 16 мм. Тип передачи XY — ременная coreXY GT-2. Концевые датчики оптические.
Тип передачи XY — ременная coreXY GT-2. Концевые датчики оптические.
Контроллер — Hercules Control Board на базе ядра ARM CORTEX M3 32-бит, 100 МГц. Шаговые двигатели — XYZ: NEMA17 1.68A 1.8° 4.4Kg*cm, Ex: NEMA11 0.67A 1.8° 1.2Kg*cm
UNI Форум
Какие шаговые двигатели и драйвера лучше ставить на UNI?
Какие шаговые двигатели и драйвера лучше ставить на UNI?
Сообщение UNI » 24 янв 2020, 10:27
Шаговый двигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Шаговые двигатели, применяемые в построении 3D принтеров, имеют стандарт NEMA (национальная ассоциация производителей оборудования) и посадочный размер NEMA 17 (посадочный размер фланца 42мм). Разные двигатели NEMA17 отличаются моментом удержания, индуктивностью, сопротивлением обмоток, максимальным током, углом поворота за шаг.
В зависимости от места применения, используемых драйверов, системы питания (12В или 24В и более) выбирать стоит разные моторы. Для осей XYZ и экструдеров в 3D принтере UNI мы рекомендуем использовать 17HS8401 в паре с драйверами ТМС2208 или LV8729 и питанием 24В и углом перемещения за шаг 1,8 градусов (200 шагов на оборот). Для экструдеров с редукторами можно использовать более «слабые» моторы 17HS4401 и другие.
При выборе шагового двигателя стоит обращать внимание на:
Момент удержания – чем больше, тем лучше.
Индуктивность обмоток – чем меньше, тем лучше.
Драйвер – это электронное силовое устройство, которое на основании цифровых сигналов управляет обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться). Стандартном являются сигналы STEP/DIR/ENABLE. STEP – тактирующий сигнал шага, DIR – сигнал направления, ENABLE – сигнал включения/выключения драйвера.
При выборе драйвера следует учитывать несколько моментов:
— Сила тока, которую может обеспечить драйвер. Желательно чтобы максимальная сила тока драйвера была на 15-30% больше тока фазы шагового двигателя.
Желательно чтобы максимальная сила тока драйвера была на 15-30% больше тока фазы шагового двигателя.
— Напряжение питания, влияющая на динамику (момент), вибрации, нагрев ШД и драйвера. Чем больше индуктивность двигателя – тем большее напряжение требуется для драйвера (поэтому мы и стараемся выбрать ШД с как можно меньшей индуктивностью!).
— Наличие или отсутствие режимов деления шага (желательно 1/128 или 1/256).
— Качество изготовления и применяемых электронных компонентов.
В 3D принтере UNI мы рекомендуем использовать следующие драйверы шаговых двигателей:
TMC2208 – улучшенный тихий режим при делении шага до 1/256, UART, различные режимы работы, не греются. Максимальный ток – 1,4А. Сопротивление выходных транзисторов (влияющих на тепловыделение – чем меньше, тем прохладнее) – 570 mOhm. Стоимость – средняя.
LV8729 – чуть менее тихие, не греются. Рекомендованы для 32 битных плат управления, т.к. при дроблении шага 1/128 практически бесшумные. Максимальный ток – 1,8А.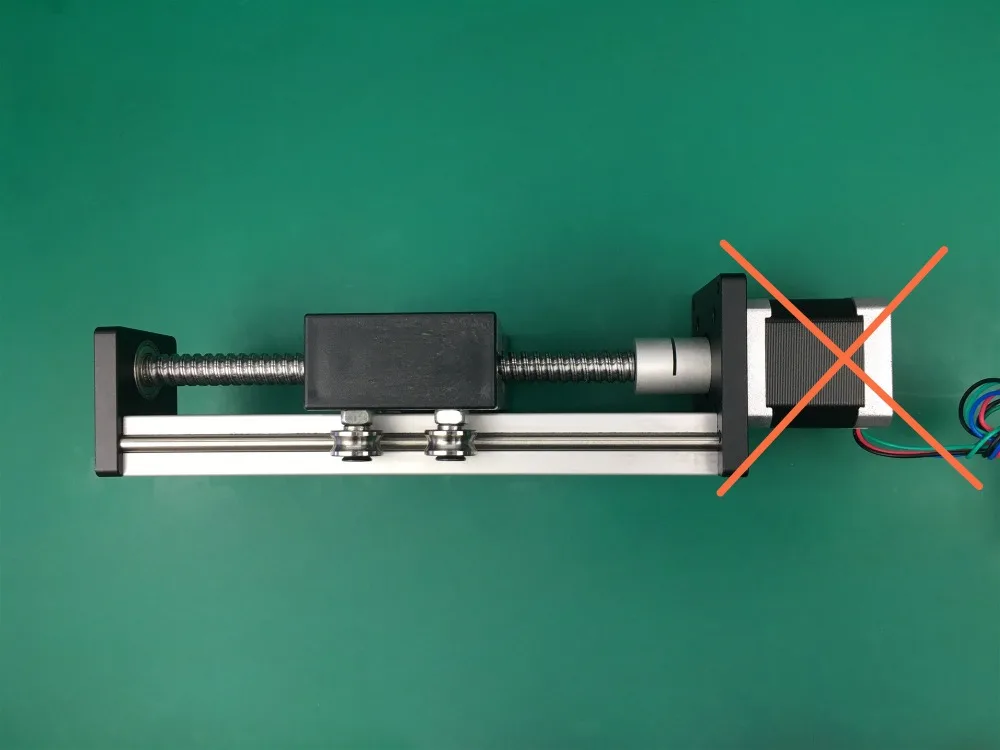 Сопротивление выходных транзисторов – 650 mOhm. Чуть более дешевые, чем ТМС2208.
Сопротивление выходных транзисторов – 650 mOhm. Чуть более дешевые, чем ТМС2208.
Хорошим вариантом считаем использование драйверов TMC2208 на осях XY, а LV8729 на оси Z и экструдерах. Получаем в результате приемлемую стоимость, тихую и надежную работу 3D принтера.
Обратите внимание что использование данных драйверов шаговых двигателей в UNI подразумевает использование 32 битной платы управления (Lerdge Х или K).
Кроме того, драйвер шагового двигателя является высокочастотным оборудованием, требующим отмотки проводов, идущих к ШД вокруг ферритовых колец в начале и в конце провода (один виток на кольцо!).
Для сборки бюджетного, но шумного варианта 3D принтера так же можно использовать дешевые, но надежные драйверы:
A4988 — максимальный ток 2А, микрошаг 1/16, Сопротивление выходных транзисторов 640mOhm.
DRV8825 – максимальный ток 2,5А, микрошаг 1/32, сопротивление выходных транзисторов 500mOhm. Данный драйвер мы НЕ рекомендуем к использованию!
голоса
Рейтинг статьи
Оценка статьи:
Загрузка. ..
..
Adblock
detector
Шаговые двигатели от принтера применение в самоделках. Как работает шаговый электродвигатель? Подключение шагового двигателя
С каждым годом люди ведут поиски альтернативных источников. Самодельная электростанция из старого автомобильного генератора будет кстати в отдалённых участках, где нет подключения к общей сети. Она сможет свободно заряжать аккумуляторные батареи, а также обеспечит работу нескольких бытовых приборов и освещения. Куда использовать энергию, что будет вырабатываться решаете вы, а также собрать его своими руками или приобрести у производителей, которых на рынке предостаточно. В этой статье мы поможем вам разобраться со схемой сборки ветрогенератора своими руками из тех материалов которые всегда есть у любого хозяина.
Рассмотрим принцип работы ветро-электростанции. Под быстрым ветровым потоком активируется ротор и винты, после в движение приходит основной вал, вращающий редуктор, а потом происходит генерация.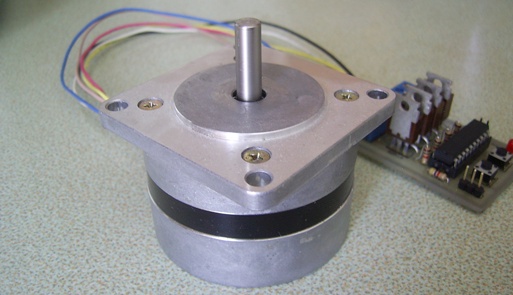 На выходе мы получаем электричество. Следовательно, чем выше скорость вращения механизма, тем больше производительности. Соответственно, при расположении конструкций учитывайте местность, рельеф, знать участки территорий, где большая скорость вихря.
На выходе мы получаем электричество. Следовательно, чем выше скорость вращения механизма, тем больше производительности. Соответственно, при расположении конструкций учитывайте местность, рельеф, знать участки территорий, где большая скорость вихря.
Инструкция сборки из автомобильного генератора
Для этого вам потребуется заранее приготовить всё комплектующие. Самым важным элементом является генератор. Лучше всего брать тракторный или автобусный, он способен выработать намного больше энергии. Но если такой возможности нет, то вероятнее стоит обойтись и более слабыми агрегатами. Для сборки аппарата вам понадобится:
вольтметр
реле аккумуляторной зарядки
сталь для изготовления лопастей
12 вольтовый аккумулятор
коробка для проводов
4 болта с гайками и шайбами
хомуты для крепления
Сборка устройства для дома на 220в
Когда все потребное готово переходите к сборке. Каждый из вариантов может иметь дополнительные детали, но они чётко оговариваются непосредственно в руководстве.
Первым делом соберите ветряное колесо — главный элемент конструкции, ведь именно эта деталь будет преображать энергию ветра в механическую. Лучше всего, чтобы у него было 4 лопасти. Запомните, что чем меньше их количество, тем больше механической вибрации и тем сложней будет его сбалансировать. Делают их из листовой стали или железной бочки. Форму они должны носить не такую, как вы видели в старых мельницах, а напоминающие крыльчатый тип. У них аэродинамическое сопротивление намного ниже, а эффективность выше. После того как вы с помощью болгарки, вырежете ветряк с лопастями диаметром 1.2-1.8 метра, его вместе с ротором требуется прикрепить с осью генератора, просверлив отверстия и соединив болтами.
Сборка электрической схемы
Закрепляем провода и подключаем их непосредственно к аккумулятору и преобразователю напряжения. Требуется использовать все, что в школе на уроках физики вас учили мастерить при сборке электрической схемы. Перед началом разработки подумайте, какие кВт вам нужны. Важно отметить, что без последующей переделки и перемотки статора вовсе не пригодны, рабочие обороты составляют 1,2 тыс-6 тыс. об/м, а этого недостаточно для производства энергии. Именно по этой причине требуется избавится от катушки возбуждения. Чтобы поднять уровень напряжения, перемотайте статор тонким проводом. Как правило, в результате мощность будет при 10 м/с 150-300 ватт. После сборки ротор хорошо будет магнитить, будто к нему подключили питание.
Важно отметить, что без последующей переделки и перемотки статора вовсе не пригодны, рабочие обороты составляют 1,2 тыс-6 тыс. об/м, а этого недостаточно для производства энергии. Именно по этой причине требуется избавится от катушки возбуждения. Чтобы поднять уровень напряжения, перемотайте статор тонким проводом. Как правило, в результате мощность будет при 10 м/с 150-300 ватт. После сборки ротор хорошо будет магнитить, будто к нему подключили питание.
Роторные самодельные ветрогенераторы очень надёжны в работе и экономично выгодны, единственным их несовершенством является страх сильных порывов ветра. Принцип работы имеет простой — вихрь через лопасти заставляет механизм крутиться. В процессе этих интенсивных вращений вырабатывается энергия, необходимого вам напряжения. Такая электростанция – это очень удачный способ обеспечить электричеством небольшой дом, конечно, чтобы выкачивать воду из скважины его мощности будет недостаточно, но посмотреть телевизор или включить свет во всех помещениях с его помощью возможно.
Из домашнего вентилятора
Сам вентилятор может быть в нерабочем состоянии, но из него требуется всего несколько деталей — это стойка и сам винт. Для конструкции понадобиться небольшой шаговый двигатель спаянный диодным мостиком для того, чтобы он выдавал постоянное напряжение, бутылочка от шампуня, пластиковая водопроводная трубка длиной примерно 50 см, заглушка для неё и крышка от пластикового ведра.
На станке делают втулку и фиксируют в разъёме от крыльев разобранного вентилятора. В эту втулку будет крепиться генератор. После закрепления, нужно заняться изготовлением корпуса. Срезают с помощью станка или в ручном режиме дно от бутылки шампуня. Во время отрезания, требуется также оставить отверстие на 10, чтобы в него вставить ось, выточенную из алюминиевого прута. Прикрепляют её с помощью болта и гайки к бутылочке. После того как была выполнена припайка всех проводов, в корпусе бутылочки проделывают ещё одно отверстие для вывода этих самых проводов. Протягиваем их и закрепляем в бутылочке сверху на генераторе. По форме они должны совпадать и корпус бутылки должен надёжно скрывать все его части.
Протягиваем их и закрепляем в бутылочке сверху на генераторе. По форме они должны совпадать и корпус бутылки должен надёжно скрывать все его части.
Хвостовик для нашего устройства
Чтобы в будущем он улавливал потоки ветра с разных сторон, соберите хвостовик, использовав заранее подготовленную трубку. Хвостовая часть будет крепиться с помощью откручиваемой крышки от шампуня. В ней тоже делают отверстие и, предварительно надев на один конец трубки заглушку, протягивают её и закрепляют к основному корпусу бутылочки. С другой стороны, трубку пропиливают ножовкой и вырезают ножницами из крышки пластикового ведра крыло хвостовика, оно должно иметь круглую форму. Все что вам нужно, это попросту обрезать края ведра, которыми оно прикреплялось к основной ёмкости.
На заднюю панель подставки прикрепляем USB выход и складываем все полученные детали в одну. Крепить радио или подзаряжать телефон можно будет через этот вмонтированный USB порт. Конечно, сильной мощностью он от бытового вентилятора не обладает, но все же освещение одной лампочки может обеспечить.
Ветрогенератор своими руками из шагового двигателя
Устройство из шагового двигателя даже при небольшой скорости вращения вырабатывает около 3 Вт. Напряжение может подниматься выше 12 В, а это позволяет заряжать небольшой аккумулятор. В качестве генератора можно вставить шаговый двигатель от принтера. В таком режиме у шагового двигателя вырабатывается переменный ток, а его без труда преобразовать в постоянный, используя несколько диодных мостов и конденсаторы. Схему вы можете собрать собственноручно. Стабилизатор устанавливают за мостами, в следствии получим постоянное выходное напряжение. Чтобы контролировать зрительно напряжение, можно установить светодиод. С целью уменьшения потери 220 В, для его выпрямления, применяются диоды Шоттки.
Лопасти будут из трубы ПВХ. Заготовку рисуют на трубе, а затем вырезают отрезным диском. Размах винта должен составлять около 50 см, а ширина — 10 см. Нужно выточить втулку с фланцем под размер вала ШД. Она насаживается на вал двигателя и крепится с помощью винтов, непосредственно к фланцам будут крепиться пластиковые “винты”.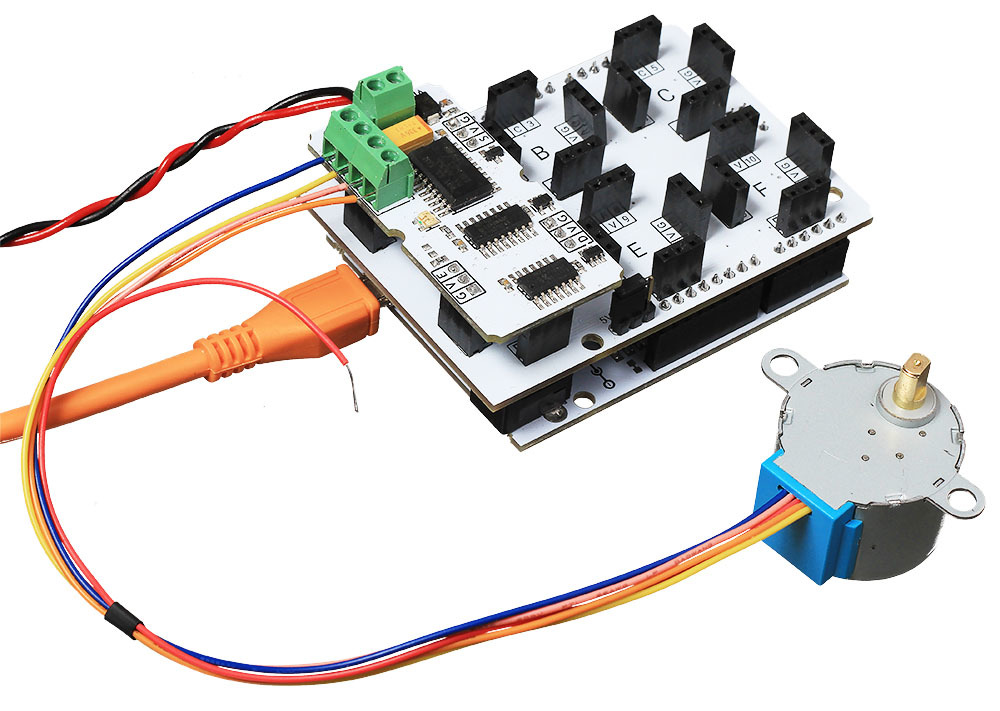 Также проведите балансировку – от концов крыльев отрезаются кусочки пластика, угол наклона изменить посредством нагрева и изгиба. В само устройство вставляют кусок трубы, к которому его тоже прикрепляют болтами. Что касается электрической платы, то её лучше разместить внизу, а к ней вывести питание. С шагового двигателя выходят до 6 проводов, которые соответствуют двум катушкам. Для них потребуются токосъёмные кольца для передачи электроэнергии от подвижной части. Соединив все детали между собой переходим к тестированию конструкции, которая будет начинать обороты при 1 м/с.
Также проведите балансировку – от концов крыльев отрезаются кусочки пластика, угол наклона изменить посредством нагрева и изгиба. В само устройство вставляют кусок трубы, к которому его тоже прикрепляют болтами. Что касается электрической платы, то её лучше разместить внизу, а к ней вывести питание. С шагового двигателя выходят до 6 проводов, которые соответствуют двум катушкам. Для них потребуются токосъёмные кольца для передачи электроэнергии от подвижной части. Соединив все детали между собой переходим к тестированию конструкции, которая будет начинать обороты при 1 м/с.
Ветряк из мотор-колесо и магнитов
Не каждый знает, что ветрогенератор из мотор-колеса можно собрать своими руками за короткое время, главное заранее запастись нужными материалами. Для него лучше всего подходит ротор Савониуса, его можно приобрести готовый или же самостоятельно. Он состоит из двух полуцилиндрических лопастей и перекрытия, из которых и получаются оси вращения ротора. Материал для их изделия выбирайте самостоятельно: дерево, стеклоткань или пвх-трубу, что является самым простым и оптимальным вариантом. Изготовляем место соединения деталей, на котором нужно проделать отверстия для крепления в соответствии с количеством лопастей. Потребуется стальной поворотный механизм, чтобы устройство могло выдерживать любую погоду.
Изготовляем место соединения деталей, на котором нужно проделать отверстия для крепления в соответствии с количеством лопастей. Потребуется стальной поворотный механизм, чтобы устройство могло выдерживать любую погоду.
Из ферритовых магнитов
Ветрогенератор на магнитах будет сложно освоить малоопытным мастерам, но все же можно попробовать. Итак, должны быть четыре полюса, в каждом будет находиться по два ферритовых магнита. Покрывать их будут накладки из металла толщиной чуть меньше миллиметра для распределения более равномерного потока. Основных катушек должно быть 6 штук, перемотаны толстым проводом и должны находиться через каждый магнит, занимая пространство, соответствующее длине поля. Крепление схем обмотки может быть на ступице от болгарки, в середину которой установлен заранее выточенный болт.
Регулируется поток подачи энергии высотой закрепления статора над ротором, чем он выше, тем меньше залипаний, соответственно мощность понижается. Для ветряка нужно сварить опору-стойку, а на диске статора закрепить 4 больших лопасти, которые вы можете вырезать из старой металлической бочки или крышки от пластикового ведра. При средней скорости вращения выдаёт примерно до 20 ватт.
При средней скорости вращения выдаёт примерно до 20 ватт.
Конструкция ветряка на неодимовых магнитах
Если вы хотите узнать о создании, нужно сделать основой ступицу автомобиля с дисками тормоза, такой выбор вполне оправдан, ведь она мощная, надёжная и хорошо сбалансированная. После того как вы отчистите ступицу от краски и грязи, переходите к расстановке неодимовых магнитов. Их потребуется по 20 штук на диске, размер должен составлять 25х8 миллиметров.
Магниты нужно размещать, учитывая чередование полюсов, перед склейкой лучше создать бумажный шаблон либо прочертить линии, делящие диск на сектора, чтобы не перепутать полюса. Очень важно, чтобы они, стоящие друг напротив друга, были с разными полюсами, то есть притягивались. Клеят их супер-клеем. Поднимите бордюрчики по краям дисков, и в центре намотайте скотч или залепите пластилином для недопущения растекания. Чтобы изделие работало с максимальной отдачей, катушки статора следует рассчитать правильно. Увеличение количества полюсов приводит к росту частоты тока в катушках, благодаря этому, устройство даже при низкой частоте оборота даёт большую мощность.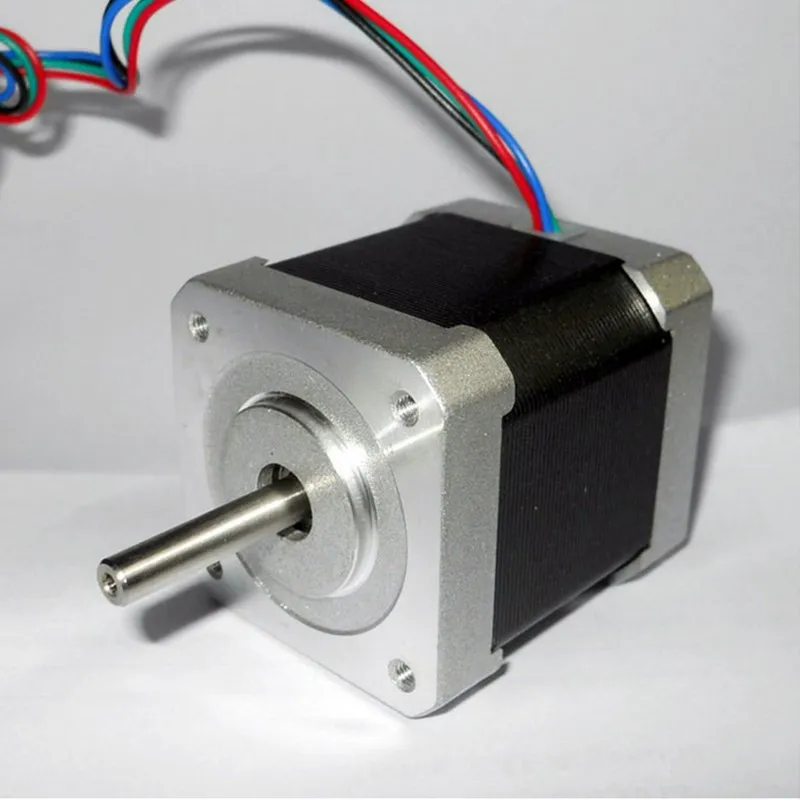 Намотка катушек осуществляется более толстыми проводами, с целью снижения сопротивления в них.
Намотка катушек осуществляется более толстыми проводами, с целью снижения сопротивления в них.
Когда основная часть готова, изготовляют лопасти, как в предыдущем случае и закрепляют их к мачте, что может быть изготовлена из обыкновенной пластиковой трубы с диаметром- 160 мм. В конце концов наш генератор, работающий на принципе магнитной левитации, с диаметром в полтора метра и шестью крыльями, в 8м/с, способен обеспечить до 300 Вт.
Цена разочарования или дорогой флюгер
Сегодня существует множество вариантов как сделать устройство для преобразования энергии ветра, каждый способ по-своему эффективен. Если вы ознакомлены с методикой изготовления оборудования вырабатывающего энергию, то будет неважно на базе чего его делать, главное, чтобы он отвечал задуманной схеме, и на выходе давал хорошую мощность.
У меня много различной оргтехники, которая вышла из строя. Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.
К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
И как оказалось — я ошибался. Шаговый двигатель от принтера или ещё от какого устройства, довольно просто запустить от переменного тока.
Я взял вот такой двигатель.
Обычно у них четыре вывода, две обмотки. В большинстве случаем, но есть и другие конечно. Я рассмотрю самый ходовой.
Схема шагового двигателя
Его схема обмоток выглядит примерно так:
Очень похоже на схему обычного асинхронного двигателя.
Для запуска понадобится:
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
Замыкаем обмотки последовательно.
Середину проводов скручиваем и запаиваем.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.
Фактически конденсатор будет параллелен одной из обмоток.
Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Вы, хоть понимаете, что пишете? Или пишете для того, чтобы человека поддержать в его начинаниях и он, потратив деньги на комплектующие для своей системы, в конечном итоге получил абсолютно неработоспособную вещь? Вы отвечаете: «Двигатель, как генер подойдет» — да, подойдет, но откуда вы взяли 1,1-1,5А? Это при каком напряжении? При какой скорости вращения ротора? Далее пишете: «Стандарт мощности 1м ленты, вроде, 5Вт. ..» — стандарта мощности тут нет, а ленты бывают и около 5Вт и около 14Вт, и около 7Вт на метр и др., а это очень большой разброс. Продолжаем: «Так как вы столько накрутили то вполне может хватить для заряда аккумулятора» — это, вообще, что означает? То, что чем сложнее, навороченнее и запутаннее схема, тем больше ее отдача и эффективность? Полная ерунда. Для зарядки 12В мотоаккума нужно около 14-15В при токе примерно 0,6-0,7А (для емкости примерно 7А/ч). Вы уверены, что система способна долговременно выдавать такие параметры? Ведь, чтобы зарядить разряженный аккум мотоцикла, 2-3-х часов не хватит. Считаете, также, что заряжать можно и от 18В? Да, можно, но электролит выкипит через неделю, если не раньше, и пластины посыпятся. Хороша рекомендация! Неприхотливы в зарядке — это не означает, что их можно заряжать любым напряжением. Далее Вы пишете: «Будет очень даже отлично, ведь вдруг забыл выключить свет и аккумулятор сел еще до того как успеет подзарядится» — говорите так, будто зарядка аккума происходит только в светлое время суток))) Это ветряк, а не солнечная батарея.
..» — стандарта мощности тут нет, а ленты бывают и около 5Вт и около 14Вт, и около 7Вт на метр и др., а это очень большой разброс. Продолжаем: «Так как вы столько накрутили то вполне может хватить для заряда аккумулятора» — это, вообще, что означает? То, что чем сложнее, навороченнее и запутаннее схема, тем больше ее отдача и эффективность? Полная ерунда. Для зарядки 12В мотоаккума нужно около 14-15В при токе примерно 0,6-0,7А (для емкости примерно 7А/ч). Вы уверены, что система способна долговременно выдавать такие параметры? Ведь, чтобы зарядить разряженный аккум мотоцикла, 2-3-х часов не хватит. Считаете, также, что заряжать можно и от 18В? Да, можно, но электролит выкипит через неделю, если не раньше, и пластины посыпятся. Хороша рекомендация! Неприхотливы в зарядке — это не означает, что их можно заряжать любым напряжением. Далее Вы пишете: «Будет очень даже отлично, ведь вдруг забыл выключить свет и аккумулятор сел еще до того как успеет подзарядится» — говорите так, будто зарядка аккума происходит только в светлое время суток))) Это ветряк, а не солнечная батарея. При правильно работающей системе, при постоянном ветре, аккум вообще не должен разряжаться, если даже забыли выключить свет. Но идея фотоэлемента сама по себе хороша с точки зрения автоматизации. Далее: светодиодная лента, наверное, будет работать, как Вы говорите, и при 30 вольтах, однако, долго ли? Сопротивления ограничивают ток, да, но он же будет расти пропорционально повышению напряжения, а не оставаться постоянным! Диоды очень не любят превышения рабочего тока. Так, что результат известен: перегрев диодов и, как следствие, резкое снижение срока эксплуатации, либо выход их из строя крайне быстрый. Следом пишете: «Емкость также не критична, добавьте еще 1 пленочный конденсатор на 1 мкф» — для чего? Это что, фильтр помех? Почему тогда 1мкФ? И зачем там вообще фильтр? А, если не фильтр, а сглаживающий пульсации элемент, то тут как раз его емкость критична! Емкость — это основной параметр конденсатора вообще-то. А 1мкФ — это пустое место для описанной человеком системы, ничего он не сгладит.
При правильно работающей системе, при постоянном ветре, аккум вообще не должен разряжаться, если даже забыли выключить свет. Но идея фотоэлемента сама по себе хороша с точки зрения автоматизации. Далее: светодиодная лента, наверное, будет работать, как Вы говорите, и при 30 вольтах, однако, долго ли? Сопротивления ограничивают ток, да, но он же будет расти пропорционально повышению напряжения, а не оставаться постоянным! Диоды очень не любят превышения рабочего тока. Так, что результат известен: перегрев диодов и, как следствие, резкое снижение срока эксплуатации, либо выход их из строя крайне быстрый. Следом пишете: «Емкость также не критична, добавьте еще 1 пленочный конденсатор на 1 мкф» — для чего? Это что, фильтр помех? Почему тогда 1мкФ? И зачем там вообще фильтр? А, если не фильтр, а сглаживающий пульсации элемент, то тут как раз его емкость критична! Емкость — это основной параметр конденсатора вообще-то. А 1мкФ — это пустое место для описанной человеком системы, ничего он не сгладит. Даже 1000мкФ, которую хотел установить автор вопросов — очень мало для его задумки. Я бы понял, если бы это было 5000-7000 или даже 10000мкФ, а то и больше. В конце человек спрашивает, хватит ли мотоаккума, чтобы лента светилась всю ночь, и Вы отвечаете, что, мол, конечно, хватит. Вы изучали физику в школе? Или еще изучаете? Это было Ваше предположение пальцем в небо или хоть какой-нибудь элементарный расчет? Давайте прикинем очень грубо: человек писал, что хочет установить 10-15м ленты. Даже, если взять минимальные значения, т.е. 10м ленты мощностью 5Вт/м, то путем нехитрых подсчетов получаем 50Вт мощности. Поделив мощность ленты на напряжение аккума (примерно 12,8В) получим ток: 50/12,8=3,9А. Емкость обычного мотоаккума примерно равна 7А/ч. Т.о. можно прикинуть, сколько времени проработает лента от полностью заряженного аккума: 7/3,9=1,79ч=1ч 47мин., т.е. почти два часа. Это далеко не вся ночь. К тому же, в расчет взяты минимальные параметры и, если длина ленты или/и ее мощность будут больше, соответственно время работы от аккума пропорционально уменьшится.
Даже 1000мкФ, которую хотел установить автор вопросов — очень мало для его задумки. Я бы понял, если бы это было 5000-7000 или даже 10000мкФ, а то и больше. В конце человек спрашивает, хватит ли мотоаккума, чтобы лента светилась всю ночь, и Вы отвечаете, что, мол, конечно, хватит. Вы изучали физику в школе? Или еще изучаете? Это было Ваше предположение пальцем в небо или хоть какой-нибудь элементарный расчет? Давайте прикинем очень грубо: человек писал, что хочет установить 10-15м ленты. Даже, если взять минимальные значения, т.е. 10м ленты мощностью 5Вт/м, то путем нехитрых подсчетов получаем 50Вт мощности. Поделив мощность ленты на напряжение аккума (примерно 12,8В) получим ток: 50/12,8=3,9А. Емкость обычного мотоаккума примерно равна 7А/ч. Т.о. можно прикинуть, сколько времени проработает лента от полностью заряженного аккума: 7/3,9=1,79ч=1ч 47мин., т.е. почти два часа. Это далеко не вся ночь. К тому же, в расчет взяты минимальные параметры и, если длина ленты или/и ее мощность будут больше, соответственно время работы от аккума пропорционально уменьшится. Вот, как-то так.
Вот, как-то так.
Я бы не стал всего этого писать, но дело в том, что лента стоит денег, аккум и фотореле тоже… И деньги это немалые, а чел, получивший одобрение и поддержку своей идеи в комментах людей, не понимающих сути и нюансов процесса, радостно побежит в магаз, потратит деньги на комплектующие, а в итоге получит систему, неработоспособную в принципе, изначально. Не надо давать советы, не разбираясь в вопросе!
Обычно дует лёгенький ветерок но мой мини ветрячёк периодически раскручивается до очень больших оборотов, винт вращается с такой скоростью, что его практически не видно, правда при таких оборотах доносится едва слышное рокатание лопастей. Сейчас этот ветрячёк поддерживает в рабочем состоянии старенький, но рабочий аккумулятор, чтобы тот не разряжался. Максимальная мощность ветрячка всего до 100мА, возможно он может выдать и больше, но у нас обычно дует небольшой ветер, и замерял на обычном ветерке.
Конструкцию подобных ветрячков подсмотрел на одном заморском сайте и решил повторить, так и родился этот малыш. В качестве генератора использовал шаговый моторчик от давно нерабочего и пылившегося у меня струйного принтера. Разобрав его выкрутил маторчик. Далее посмотрел, повертел, покрутил руками, померил сколько даёт, давал очень мало, но вольты поднимались выше 12-ти, а значит он теоретически мог заряжать аккумулятор.
В качестве генератора использовал шаговый моторчик от давно нерабочего и пылившегося у меня струйного принтера. Разобрав его выкрутил маторчик. Далее посмотрел, повертел, покрутил руками, померил сколько даёт, давал очень мало, но вольты поднимались выше 12-ти, а значит он теоретически мог заряжать аккумулятор.
Далее из транзистора сделал крепление для лопастей. Транзистор просверлил по диаметру вала на котором стаяла зубчатая насадка, в общем под её размеры. Надел на вал транзистор, капнул клея и покрутил убедившись что всё ровно. Потом окончательно зафиксировал с помощъю эпоксидки. Развёл немного и залил отверстие транзистора, дополнительно защитил моторчик от непогоды замазав дырочки в моторчике. Ниже фотография сего генератора.
Далее из отрезка ПВХ трубы, диаметром 110мм, вырезал лопасти, на трубе нарисовал заготовку, которую вырезал отрезной машинкой. Размеры взял примерные ширина получилась 9см, а размах винта 48см. Просверлил отверстия и прикрутил винт к моторчику-генератору с помощъю маленьких болтиков.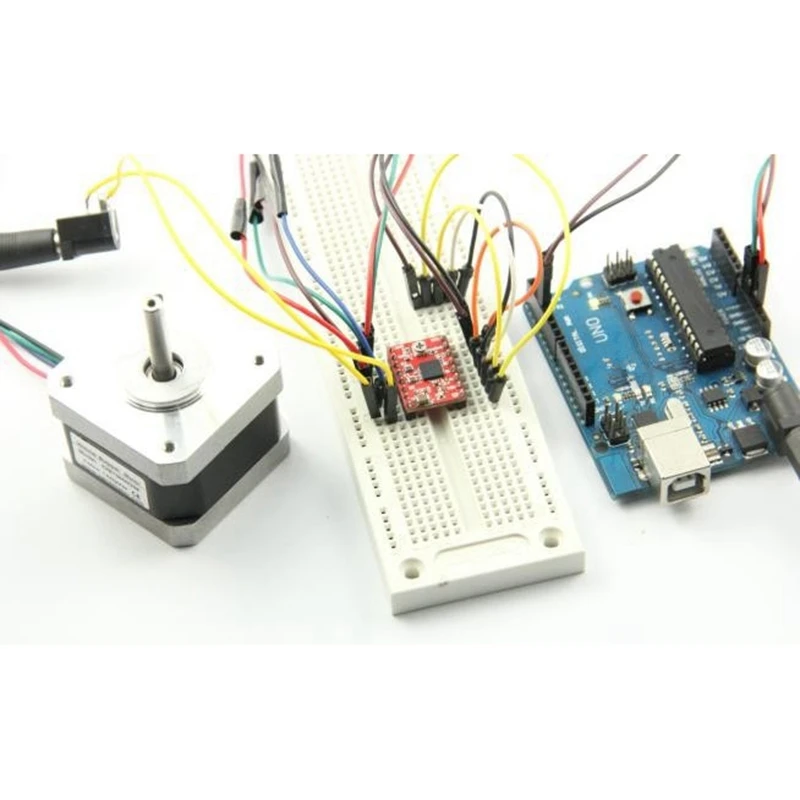
За основу использовал отрезок 55-той ПВХ трубы, далее вырезал хвост из фанерки, и добавил кусочек от 110-той.Моторчик вклеил внутри трубы. После сборки получилась вот такая ветроэлектростанция. Сразу собрал выпрямитель.Так как этот мотор не хотел давать много вольт на малых оборотах, то собрал по схеме удвоения и включил последовательно.
Диоды взял HER307, конденсаторы — 3300мкф
Схему укутал в полиэтилен и вставил в трубу выпрямитель, потом мотор и привязал его проволокой сквозь просверленные дырочки, пространство замазал силиконом. Так-же силиконом потом замазал все дырдочки сверху, а снизу просверлил одно отверстие на всякий случай, чтобы если что вода стекла, и испарялся конденсат.
Хвост закрепил насквозь болтом, полукруглый хвост вставил и привязал проволокой, он и так прочно держится. Нашёл центр тяжести, просверлил (диам. 9мм.) Ещё просверлил диам. 6мм два болта М10, насквозь, под ось. (Болты М10 здесь служат «подшипником» оси) Ввернул сверху и снизу болты М10 в трубу, смазал длинный болт М6 солидолом и всё скрутил, получилось довольно жёстко. Болт-ось (М6) прикрутил к уголку, а его к палке. Сверху на болт М10 одел на силиконе пробку, теперь ось воды не боится. Всё ветрогенератор изготовлен.
Болт-ось (М6) прикрутил к уголку, а его к палке. Сверху на болт М10 одел на силиконе пробку, теперь ось воды не боится. Всё ветрогенератор изготовлен.
Для мачты взял несколько брусочков. которые скрутил саморезами, закрепил ветряк и поднял на ветер. Подключил к аккумулятору, зарядка идёт, но очень слабенькая, поддерживает аккумулятор от естественного разряда. Так как верячок крутиться, то остался доволен, по крайней мере буду знать откуда ветер дует.Этот вариант — как сказано на том сайте — little weekend project, то-есть маленький проект для выходных, для удовольствия что-нить поковырять, тем более я не потратил ни копейки… клей не в счёт. Так по идее может пару маленьких светодиодов зажечь, или мобильный телефон за пару суток зарядить, но скорее всего такой слабый ток телефон примет за плохой контакт и отключит, написав на дисплее плохое соединение.
В будущем если будет время и желание может сделаю на освещение двора, вот только второй такой-же соберу и аккумулятор небольшой поставлю, или несколько аккумуляторных батареек. Для этого остался ещё один шаговый, только этот выдаёт под 2х20вольт от прокручивания рукой, но ток маленький. А второй — на щётках, сразу постоянка. От руки 10 вольт, КЗ — 0,5 Ампера. А ещё всё-же буду мучить автогенератор, вот только магниты дождусь.
Для этого остался ещё один шаговый, только этот выдаёт под 2х20вольт от прокручивания рукой, но ток маленький. А второй — на щётках, сразу постоянка. От руки 10 вольт, КЗ — 0,5 Ампера. А ещё всё-же буду мучить автогенератор, вот только магниты дождусь.
Пришла в голову простая, очевидная, но гениальная мысль. Ведь если учесть, что шаговый двигатель является не только моторчиком, который обеспечивает механическую работу абсолютно разных устройств (начиная от принтеров сканеров и другой офисной аппаратуры, заканчивая различными агрегатами, применяемыми в более серьезных устройствах). Шаговый двигатель так же может послужить отличным генератором электричества!
А его самый главный плюс во всем, это то, что ему вовсе не требуются большие обороты, он вполне может исправно работать и при малых нагрузках. То есть даже при минимальном действии силы направленной на него, шаговый двигатель отлично вырабатывает энергию. Самое главное, что этой энергии вполне хватит на различные нужды, вроде освещения дороги велосипедисту с помощью подключенного к шаговому двигателю фонаря.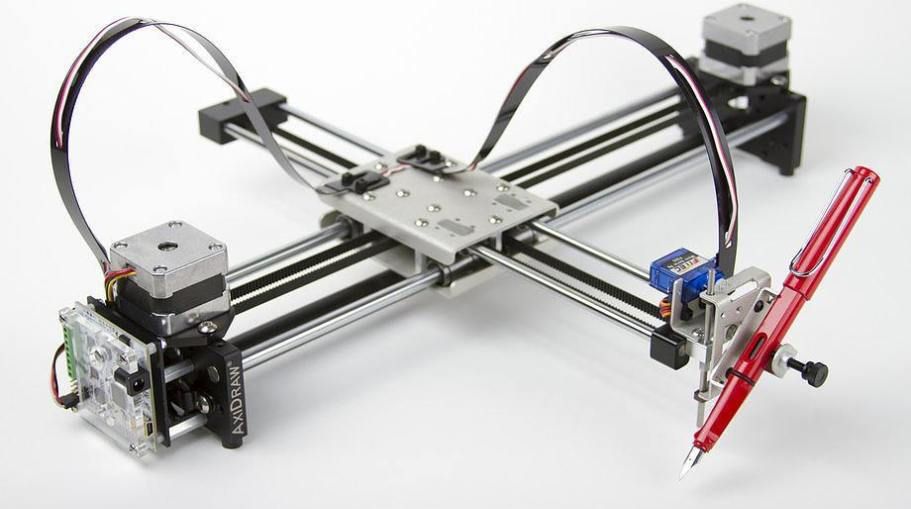
К сожалению с обычным генератором стандартному велосипеду будут все же необходимы начальные обороты, до того как фонарик начнет испускать лучи достаточно яркого света для четкого освещения пути. Но при использовании шагового двигателя этот недостаток удаляется сам собой, то есть освещение будет подаваться сразу как только начнется вращение колеса.
Но правда у этой чудо конструкции все же будет ряд недочетов. Например наиболее явный из них, это большое магнитное залипание. Но на самом деле это не так страшно для велосипедиста.
Что приступая к работе нам будет необходимо найти некоторые детали:
1) Собственно сам шаговый двигатель.
2) парочка конденсаторов большой емкости.
3) светодиодные фонари
4) стабилизатор напряжения 5-6 вольт.
Найти шаговый двигатель довольно просто в силу того, что он весьма распространен во всех офисных приборах. Единственное что нужно понимать, это то, что чем больше шаговый двигатель — тем соответственно лучше для нас.
Тут будет описано и представлено несколько моделей шаговых двигателей и различные варианты их крепления к железному коню.
Для начала возьмем самый большой двигатель, что удалось раздобыть автору. Он демонтировал его из обычного офисного плоттера для печати(по сути это принтер, только в несколько раз большего размера).
Внешне двигатель довольно велик.
Но прежде чем приступить к изучению схемы стабилизации так же схемы питания, стоит обратить внимание на методику крепления этого агрегата к велобайку.
Если взгляните на рисунок, то поймете, что генератор расположен ближе к оси колеса и вращение передается от дополнительного круга.
И все же так как модель велосипеда у каждого своя и кто-то не захочет повреждать раму саморезами, вам будет нужно самому разработать крепление а так же круг вращения, вариантов тут действительно много.
Если же вы не представляете себе как прикрутить большой шаговый двигатель к конструкции, есть вариант поменьше:
Вам остается только выбрать вариант генератора, подходящего под размеры вашего транспортного средства.
Чтож когда с шаговыми двигателями разобрались, можно приступить и к фонарям и цепям питания.
Фонари необходимо взять светодиодные. схема выпрямления будет выглядеть так: блок выпрямительных диодов, несколько конденсаторов большой ёмкости и естественно стабилизатор напряжения. В принципе это стандартная схема питания.
Шаговый двигатель стандартно имеет на выходе четыре проводка, которые соответствуют двум катушкам. именно по этой причине на изображении выпрямительных блока тоже два. Этот самодельный генератор электричества вполне может выдавать аж до 50 вольт напряжения на больших оборотах, так что, конденсаторы лучше взять соответственные(напряжение выше 50). Ну а стабилизатор на напряжение 5-6 вольт.
И так в чем же суть самоделки, и почему она понадобилась?
Все дело в его преимуществе, даже только тронувшись с места- вам путь будет уже ярко освещен фонарем, запитанным от нашего шагового двигателя- он же генератор.
Так же хотелось бы отметить, что в процессе движения фонарь не будет мигать или тухнуть- освещение будет плавным и ровным.
Шаговый двигатель от принтера для чего можно использовать
Рейтинг статьи
Загрузка…
Infinum3d — 3D-принтер своими руками
Экструдер. Часть I.
Продолжим на тему того, каким образом филамент подается в зону плавления (HotEnd’а).
На фото классический репраповский экструдер — родоначальник всех 3d-печатающих механизмов у самодельщиков.
Стоит отметить тот факт, что редуктор (с отношением не менее1:5) обязательно нужен для привода филамента диаметром 3,0 мм. Назначение редуктора — повысить момент на валу за счет уменьшения частоты вращения. Другими словами, будет крутить сильнее, но медленнее, а нам, как раз, большая частота вращения и не нужна — пластик должен успевать плавиться.
Если имеем дело с прутком 1,75 мм либо еще меньшего диаметра, то редуктор нам делать необязательно. Хотя, если используется совсем слабый двигатель (например, от старого принтера Epson, который я использовал поначалу), то редуктор все-таки придется делать.
Так как пластик 3 мм значительно (!) дешевле более тонких вариантов (к тому же распространеннее), то и привод мы будем делать, рассчитывая на более тостый филамент. А уже пластик 1,75 (и подобные) мы сможем «толкать» этим экструдером вообще без проблем. В этом случае потребуется лишь небольшая модификация хотэнда (об этом позже).
Итак.
Для начала нам нужен двигатель. Причем шаговый и очень желательно биполярный, иначе с управлением придется повозиться. Отличить его от униполярного (еще одна разновидность шаговиков) можно по количеству выводов. Их должно быть 4. В этом случае можно будет использовать типовой драйвер управления (Pololu). Схема такого двигателя:
В принципе, можно подключить и двигатель, который имеет 6 выводов — главное правильно определить где какие обмотки, после чего просто останется 2 ненужных провода, которые можно просто отрезать.
В данном случае у нас останутся неподключенными «желтый» и «белый» провода.
Из старых принтеров можно наковырять много полезного, но движки там стоят очень слабые, особенно в новых струйниках, поэтому годятся для применения только с редукторами с очень большим передаточным отношением. Вот пример таких двигателей:
Из всего этого многообразия для использования в качестве привода филамента пойдет разве что Epson EM-257 — он как раз имеет нужное количество выводов (4), а также более-менее неплохой момент на валу. Вот еще несколько подобных двигателей:
Они конечно слабоваты для нашей цели, и, в идеале, лучше использовать аналог Nema17 (тот, что применяется в оригинальном репрапе), зато их можно купить за копейки на любом радиорынке или выковырять из старого железа. К слову — не стоит брать за основу экструдера советские ДШИ-200, которые очень популярны у станкостроителей, т.к. они слишком тяжелые, чтобы их тягать в качестве печатающей головы.
Донор выглядит примерно так как на фото. А в разобранном виде что-то вроде:
Фото не мое, но принципиально эти планетарные редукторы сильно друг от друга не отличаются. Поэтому ищем дохлый шуруповерт и вперед — разбирать.
Поэтому ищем дохлый шуруповерт и вперед — разбирать.
Как и раньше, нам понадобится толковый токарь, который поможет насадить приводную шестерню от оригинального шуруповертного движка на наш шаговик. Также необходимо будет выточить крышку-корпус для подшипника выходного вала. Фотографии моего варианта выложу позже (придется разобрать готовый экструдер). Можно, в принципе, сделать чертеж крышки, которая была выточена из алюминия, хотя токарю обычно хватает простого объяснения «на пальцах» чего именно мы хотим от него получить.
Вроде бы пора брать фотоаппарат в руки и начинать детальную фотосессию всех тонкостей процесса, а то в интернете кончились картинки, которые идеально подойдут к моему описанию.
Электроника для ЧПУ станков, в которой можно использовать драйвер шагового двигателя A4988.
Драйвер шагового двигателя A4988 можно подключить к микроконтроллеру, например к Arduino, напрямую.
Скетч вращения шагового двигателя NEMA 17, драйвер A4988.
Программа для вращения шагового двигателя NEMA 17, драйвер A4988.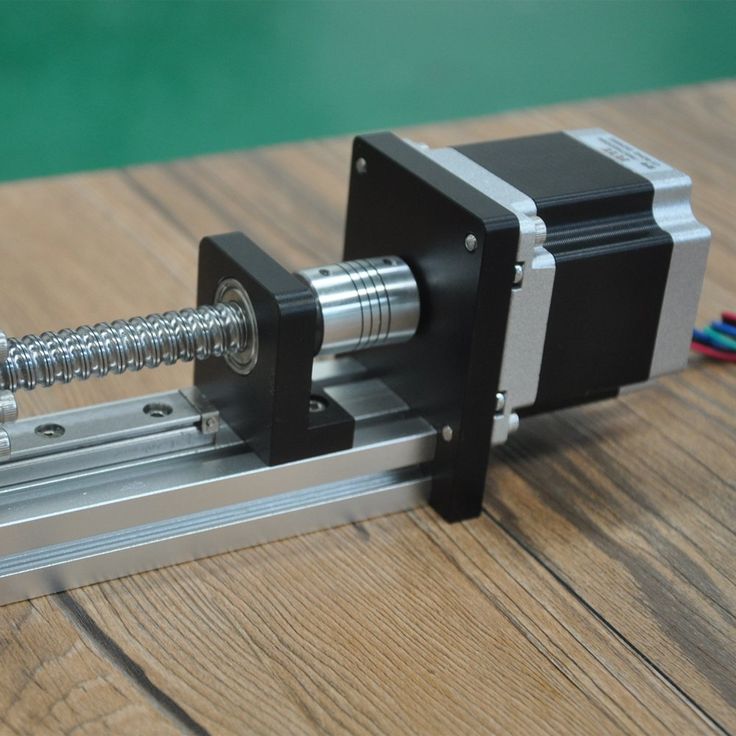 Сначала мотор совершает полный оборот в одну сторону, потом в другую.
Сначала мотор совершает полный оборот в одну сторону, потом в другую.
Подробнее о подключении шаговых двигателей к Ardiono смотрите на сайте Ардуино технологии.
Для более простого подключения шагового двигателя к Arduino или другому микроконтроллеру существуют модули. Модули бывают разные, на фото ниже приведен пример двух различных модулей.
Распиновку и как подключать модуль драйвера A4988 будем рассматривать в следующей статье.
Использование драйвера A4988 с CNC shield v3 и CNC shield v4.
Драйвер A4988 можно установить на CNC shield v3 и CNC shield v4. CNC shield используются для управления ЧПУ станками и облегчают сборку электроники.
Данный набор позволяет без пайки собрать электронику для двух осевых, трех осевых, четырех осевых ЧПУ станков, а также для самостоятельной сборки 3D принтеров. При реализации ЧПУ станков данные шилды используются достаточно часто благодаря своей низкой цене и простоте сборки.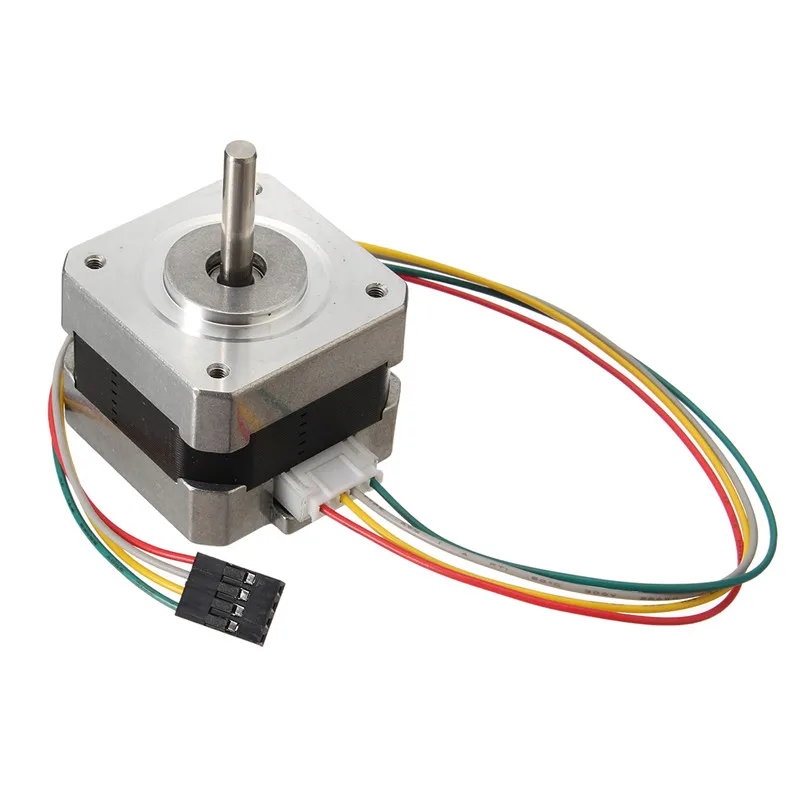
Более подробно CNC shield v3 и CNC shield v4 будем рассматривать в следующих статьях.
Мы еще не рассмотрели использование данных драйверов для создания 3D принтеров на основе Ramps. Но это совсем другая история.
Вывод можно сделать следующий. Не смотря на свою небольшую стоимость и небольшой размер, драйвера отлично подходят для реализации большого количества проектов. От самодельных станков, до роботов манипуляторов.
Понравился Драйвер шагового двигателя A4988? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Программной
Прошивка оболочкой для Wiring — «языка» для программирования Arduino — служит программа с одноименным Arduino — названием, недавно значительно обновленная и получившая номер гордый версии Arduino 1. 0 после 23 ранних Arduino релизов IDE.
0 после 23 ранних Arduino релизов IDE.
Кратко опишу наши скачиваем:
- действия Arduino 1.0
- Устанавливаем
- Устанавливаем дополнительные для библиотеки M-Shield
- Выбираем нашу плату: Board-Tools-тип платы (у меня это Diecimila Arduino or Duemilanove w/ ATmega168
- Подключаем контроллер с кабеля помощью USB A-B
- Возможно вам потребуется драйвер установить FTDI USB, скачать его сайтас можно FTDI.
- Выбираем com-порт: Serial-Tools Port-ваш порт
- Verify
- Подробная
Upload информация о среде программирования Arduino, ее использовании и установке на сайте Arduino.
голоса
Рейтинг статьи
Оценка статьи:
Загрузка…
Adblock
detector
3D -принтеров Stepper Motors & Stepper Drivers
Sort By
ActureBestsellersCustomer Reviewsprice, Low -Highprice, High -Lownew Presescalles
Bondtech nema17 Stepper 25mm
- .
- Высокий крутящий момент
- Original Bond Tech

BondTech Радиатор
- Лучшее рассеивание тепла
- Самоклеящаяся подложка
Creality Шаговый двигатель
8 типов моделей
- Оригинальная запчасть
- From Creality 3D
Anycubic Шаговый двигатель
5 Типы моделей
- Оригинальная запчасть
- By Anycubic
BIGTREETECH Драйвер шагового двигателя
8 типов моделей
- Высокое качество
- Доступны различные версии
- Возможность обновления
Артиллерия Шаговый двигатель
- Оригинальная запчасть
- От артиллерии
FLSUN СТИПЕР
3 Типы моделей
- Оригинальная запасная часть
00111111111111111111111011011011013.
BondTech Шаговый двигатель NEMA17
- Планетарная передача
- Высокий крутящий момент
- Original Bond Tech
Артиллерия Шаговый двигатель
- Оригинальная запчасть
- Артиллерия
BIGTREETECH Драйвер шагового двигателя EZ
2 типа моделей
- Драйвер 2-в-1 и радиатор
- Тихие движения
- Очень прочный
BIQU Драйвер шагового двигателя
- Оригинальная запчасть
9019 BTECHTRIG
9
20009 EZ Driver Connector
- Адаптер для повышения совместимости
E3D Hemera XS Motor
- Оригинальная запчасть
- Для E3D Hemera XS
- Включая ведущую шестерню
E3D Hemera Motor
- Оригинальная запчасть
- Для E3D Hemera
- Включая ведущую шестерню
Zortrax Двигатель экструдера
- Оригинальные запчасти
9 Все цены вкл. НДС.
НДС.
Почему в 3D-принтерах используются шаговые двигатели? (У нас есть ответ) — 3dprintscape.com
Вы могли заметить, что двигатели в 3D-принтерах не похожи на традиционные двигатели. Эти двигатели могут выполнять одно и то же действие непрерывно. В этой статье мы объясним причины, по которым в 3D-принтерах используется такой двигатель.
В 3D-принтерах используются шаговые двигатели, поскольку они более эффективны и точны для создания небольших узоров по сравнению с другими двигателями, такими как серводвигатели или щеточные двигатели.
Шаговые двигатели дешевле и не требуют для работы системы обратной связи. Эти электромагнитные устройства отлично подходят для машин, которые выполняют одну и ту же операцию снова и снова. Давайте подробнее рассмотрим, что такое шаговые двигатели, как они работают в 3D-принтерах и в каких других отраслях используются эти двигатели.
Что такое шаговые двигатели?
Шаговые двигатели — это двигатели с электронной коммутацией, которые используют электричество и магнитные принципы для создания движения. Этот тип двигателя требует источника постоянного тока.
Этот тип двигателя требует источника постоянного тока.
Части шагового двигателя
Шаговый двигатель состоит из следующих частей:
- Ротор
- Зубья статора
- Источники питания постоянного тока
Как работает шаговый двигатель?
Зубья статора размещаются вокруг ротора. Зубья в роторе и статоре никогда не будут одинаковыми. Это сделано специально, чтобы создать движение.
Первоначально часть зубьев ротора будет совмещена с зубьями статора. Остальные будут расположены по-другому, чтобы обеспечить движение. Следующий набор зубьев статора электризуется, чтобы притянуть ротор. Это заставляет ротор двигаться по часовой стрелке или против часовой стрелки, в зависимости от того, как он был установлен.
Шаговые двигатели в 3D-принтерах
Теперь вы понимаете основы работы этих двигателей. Давайте посмотрим, как они используются в 3D-принтерах.
Сколько двигателей у 3D-принтера?
3D-принтер имеет как минимум четыре шаговых двигателя и использует их для:
- перемещения рабочей платформы вверх и вниз, называемого двигателем Z.
- Перемещение рабочей платформы вперед и назад, называемое двигателем Y.
- Перемещайте платформу сборки влево и вправо, называемую мотором X.
- Загрузите материал для печати, называемый двигателем экструдера.
Зачем использовать шаговые двигатели в 3D-принтерах?
Шаговые двигатели обладают многими преимуществами, поэтому вы можете найти их в большинстве современных 3D-принтеров. Вот некоторые из преимуществ шаговых двигателей:
- Надежность. Вы можете рассчитывать на долговечный двигатель, который при регулярном использовании может работать годами.
- Наличие. Эти двигатели дешевы в производстве, и на рынке их много. Именно из-за такого сочетания они имеют доступную цену.
- Точность. Эти двигатели работают поэтапно, и это отлично подходит для 3D-печати, потому что вам не нужна система обратной связи, чтобы знать, какие шаги были выполнены. Кроме того, они могут делать микрошаги, которые составляют часть всего движения.
- Крутящий момент. Если вы сравните его с другими двигателями, шаговые двигатели не имеют большого крутящего момента. Тем не менее, это преимущество в 3D-печати, потому что оно помогает с точностью. Еще одним положительным моментом в его крутящем моменте является удерживающий крутящий момент. Шаговые двигатели могут сохранять исходное положение после приложения силы.
- Консистенция. Шаговые двигатели не сильно различаются по размеру от одного производителя к другому.

Недостатки шаговых двигателей
Как говорится, где свет, там и тень. Шаговые двигатели хороши не во всем. Ниже перечислены некоторые недостатки использования электродвигателей.
- От системы управления не получен ответ о возможных пропущенных шагах.
- Скорости с низким крутящим моментом. Это критический фактор, влияющий на время, необходимое для доставки готовой печати. Печать сложной фигуры может занять несколько дней.
- Они могут нагреваться до высоких температур из-за высокого потребления электроэнергии.

Другие варианты использования шаговых двигателей
Шаговые двигатели используются не только в 3D-принтерах. Эти типы двигателей служат другим целям. Вот некоторые примеры:
- Роботы
- Антенны
- Жесткие диски
- Игрушки
Другие двигатели в 3D-принтерах
Когда мы говорим о 3D-печати, наиболее часто упоминаются шаговые двигатели. Тем не менее, серводвигатели также пытаются пробиться на рынок.
Что такое серводвигатель?
Серводвигатель — это еще один тип двигателя, который использует электричество для создания движения. Одной из особенностей серводвигателя является его энкодер. Он использует энкодер для обеспечения обратной связи о шагах, пропущенных двигателем.
Еще одним важным аспектом серводвигателей является то, что они могут работать от постоянного или переменного тока.
Parts Of A Servo Motor
The internal components of a servo motor include:
- Gears
- Potentiometer
- Motor
- Circuit
- Servo case
Differences Between A Servo Motor And A Stepper Motor
As Вы уже знаете, серводвигатели сконструированы иначе, чем шаговые двигатели. Разные конструкции означают разные характеристики. Вот некоторые из основных различий между этими двумя типами двигателей:
Разные конструкции означают разные характеристики. Вот некоторые из основных различий между этими двумя типами двигателей:
- Серводвигатели обеспечивают обратную связь о любом отсутствующем шаге в процессе.
- Серводвигатели могут быть более точными, чем шаговые двигатели.
- Если вам нужен высокий крутящий момент и высокая скорость, серводвигатели работают намного лучше, чем шаговые двигатели.
Интересные факты о 3D-принтерах и шаговых двигателях
- Первое известное упоминание о шаговых двигателях относится к 1930-м годам.
- Разработка шагового двигателя была тесно связана с такими техническими разработками, как транзистор.
- Шаговые двигатели широко используются в роботизированных манипуляторах для медицинских целей, производственных и офисных разработок с конца 1970-х годов.
- 3D-печать представляет изображение в виде нескольких горизонтальных слоев, наложенных друг на друга. Вот почему вам нужны двигатели для перемещения горячего конца.

Часто задаваемые вопросы
Каков срок службы шаговых двигателей?
Срок службы до 10 000 часов непрерывной работы. Это эквивалентно использованию его по восемь часов в день в течение пяти лет.
Могут ли шаговые двигатели работать непрерывно?
Да, могут. Это одно из преимуществ, которые они предлагают. Вот почему вы найдете их в машинах, которые выполняют то же самое движение.
Вам нужен энкодер с шаговым двигателем?
Нет, нет. Шаговые двигатели очень жесткие и стабильные. Но его можно добавить в качестве резервного устройства.
Какие шаговые двигатели наиболее распространены в 3D-принтерах?
К наиболее распространенным двигателям в 3D-принтерах относятся:
- NEMA 14
- NEMA 17
- NEMA 23
- NEMA 24
Что означает NEMA?
NEMA — это аббревиатура Национальной ассоциации производителей электрооборудования, организации, отвечающей за определение стандартов для электротехнической продукции.
Какой шаговый двигатель самый мощный?
Победителем здесь станет NEMA 23 с удерживающим моментом 3 Нм.
Какой мотор чаще всего используется в 3D-принтерах?
Самый распространенный шаговый двигатель — NEMA 17. Большинство машин используют эту модель, потому что она дешевле остальных и ее очень легко найти.
Что такое «блинный мотор»?
Шаговый двигатель с номинальным крутящим моментом от 20 до 25 Н⋅см. Вы можете найти эти двигатели в портативных или небольших 3D-принтерах.
Что такое «стандартный двигатель»?
Шаговый двигатель с номинальным крутящим моментом 40-45 Н⋅см. Это самая распространенная категория двигателей для 3D-принтеров.
Что такое шаговый двигатель с высоким крутящим моментом?
Чтобы шаговый двигатель считался высокомоментным, он должен превышать 50 Н⋅см. Двигатели с высоким крутящим моментом также известны как Big Beef. Вы можете найти эти двигатели в больших 3D-принтерах.
Вы можете найти эти двигатели в больших 3D-принтерах.
Статьи по теме
- Как распечатать файл из Thingiverse (простой способ!)
- Используете много мощных 3D-принтеров? (Числа внутри)
- Создайте температурную башню с помощью Cura — простой способ
- Какие фигуры нельзя напечатать в 3D? – Подробности внутри!
- Почему 3D-печать работает медленно?
Заключительные мысли о 3D-принтерах Двигатели
3D-принтеры — это усовершенствованные механизмы, точные и аккуратные по своей конструкции. Эта точность достигается благодаря их шаговым двигателям.
Шаговые двигатели отлично подходят для повторяющихся действий. Несмотря на то, что они не такие быстрые и мощные, как другие двигатели, они отлично подходят для 3D-печати. В конце концов, когда приходится чем-то жертвовать, все согласятся, что качество не подлежит обсуждению.
Другие двигатели пытаются проникнуть в бизнес 3D-принтеров. Но на данный момент конкурировать с шаговыми двигателями было бы забавным испытанием.
Но на данный момент конкурировать с шаговыми двигателями было бы забавным испытанием.
Обязательно загляните на наш канал на YouTube. Если вам нужна дополнительная информация или у вас есть какие-либо вопросы, оставьте комментарий ниже или присоединяйтесь к нам в Discord. Если вам понравилась эта статья и вы хотите прочитать другие, нажмите здесь.
Калькулятор охлаждения шагового двигателя для 3D-принтеров
Существует несколько практических причин, по которым может потребоваться охлаждение компонентов внутри 3D-принтера. Первое и самое важное — убедиться, что ваш принтер остается в рабочем состоянии и не нуждается в обслуживании. Одним из наиболее важных компонентов большинства 3D-принтеров является шаговый двигатель. Это двигатели, которые отвечают за выдавливание и позиционирование модели в плоскостях x, y и z. Эти три мотора могут работать так сильно, что могут обжечь вас, если вы попытаетесь дотронуться до них во время печати. Хотя эти шаговые двигатели предназначены для работы в горячем состоянии, существует ограничение на то, насколько горячими они должны быть в течение длительного времени. Поэтому мы решили посвятить эту страницу разбору основ охлаждения шаговых двигателей.
Поэтому мы решили посвятить эту страницу разбору основ охлаждения шаговых двигателей.
Шаговые двигатели промышленного класса имеют магнитные сердечники, которые начинают разрушаться при достижении температуры выше 80°C. В теплые дни, когда температура окружающей среды может быть выше 30°C, температура поверхности стандартного шагового двигателя будет колебаться между 70°C и 75°C для длительной печати при умеренных скоростях экструзии. Хотя это по своей сути не плохо для долговечности принтера, оно ограничивает количество экспериментов, которые можно безопасно проводить с заводской настройкой.
Магнитный сердечник шагового двигателя начинает разрушаться при 80°C
Примеры
Прекрасным примером этого является попытка увеличить скорость черновой печати. Увеличение скорости экструзии при сохранении постоянной выходной температуры потребует дополнительного крутящего момента от экструзионного двигателя. Этот дополнительный крутящий момент потребует большей мощности, что приводит к рассеиванию тепла из-за электромеханической неэффективности. Другими словами, моторы нагреваются сильнее, когда вы пытаетесь печатать быстрее. В жаркий день использование стандартных шаговых двигателей на высоких скоростях в течение длительного времени может привести к преждевременному износу магнитного сердечника.
Другими словами, моторы нагреваются сильнее, когда вы пытаетесь печатать быстрее. В жаркий день использование стандартных шаговых двигателей на высоких скоростях в течение длительного времени может привести к преждевременному износу магнитного сердечника.
Другим практическим примером является обычная попытка свести к минимуму расслаивание из-за сквозняков, проникающих в зону сборки. Это часто делается путем ограждения окружающей территории и сохранения тепла от платформы сборки и горячего конца. Однако это дополнительное тепло и отсутствие воздушного потока могут вызвать много проблем для вашего 3D-принтера, если их не учитывать. Это справедливо даже в том случае, если вы используете принтер на умеренной скорости в замкнутом пространстве.
Добавление пассивного радиатора к 3D-принтеру для недорогого и не требующего особого обслуживания охлаждения шагового двигателя
Одним из самых простых способов охлаждения компонентов системы без нарушения работы всей системы является добавление пассивных радиаторов.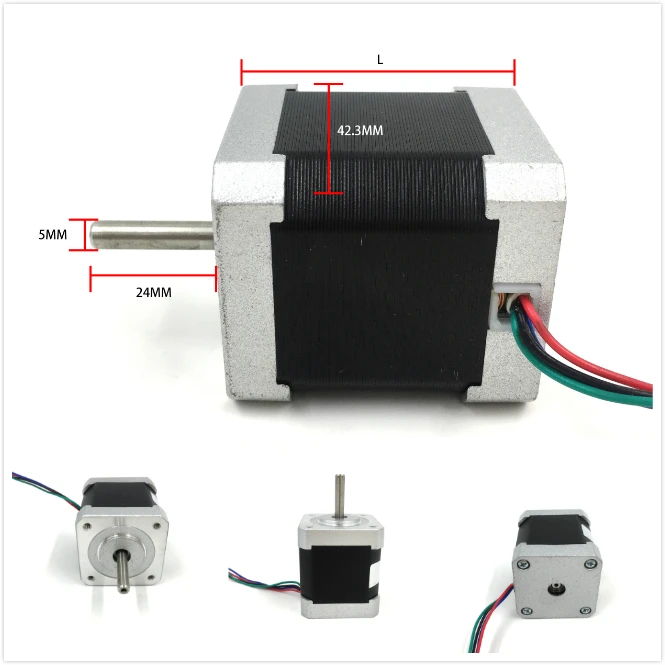 Это увеличит рассеивание тепла отдельными компонентами за счет расширения площади, доступной для конвективной теплопередачи. Следующие уравнения теплопередачи и их производные помогают проиллюстрировать этот эффект:
Это увеличит рассеивание тепла отдельными компонентами за счет расширения площади, доступной для конвективной теплопередачи. Следующие уравнения теплопередачи и их производные помогают проиллюстрировать этот эффект:
Вывод
Это общее уравнение для конвективной теплопередачи, которое зависит от коэффициента теплопередачи (h), площади поверхности двигателя (A1) и разница температур двигателя и окружающего воздуха (ΔT1). Подставьте исходные значения сюда.
Это уравнение вводит новый сценарий с другой площадью поверхности и разницей температур. Вот куда пойдут значения теплоотвода.
В зависимости от рассматриваемой ситуации следует использовать одно из двух приведенных выше уравнений. Первый случай представляет собой добавление корпуса к системе, так что мощность, рассеиваемая двигателем, остается постоянной, в то время как разница температур, необходимая для теплопередачи, изменяется. Второй случай представляет собой увеличение скорости печати, что увеличивает требуемую рассеиваемую мощность, в то время как теплопередача из-за перепада температур остается постоянной. Мы будем продолжать использовать первый случай для этой демонстрации.
Мы будем продолжать использовать первый случай для этой демонстрации.
Выпадает общий коэффициент теплопередачи. Это упрощение, так как коэффициент теплопередачи несколько меняется при добавлении ограждения, поскольку потоки ветра уменьшаются почти до нуля. Однако этими изменениями можно пренебречь, если интегрировать их в течение всей продолжительности печати. Это связано с тем, что значительные черновики обычно являются периодическими и краткими на незакрытых принтерах. Этих случаев достаточно для создания отслоившихся слоев на микроуровне, но они не очень важны при том уровне непрерывной теплопередачи, с которым мы имеем дело в этих шаговых двигателях.
Выводы
Вот первый существенный вывод для наших расчетов: множитель площади, необходимый для поддержания постоянной температуры поверхности, обратно пропорционален соотношению температурных дельт. Например, если ΔT1 равно 10, а ΔT2 равно 5, вам потребуется удвоить эффективную площадь поверхности, чтобы поддерживать постоянную температуру двигателя.
Это уравнение вводит новые переменные, начальную площадь поверхности (A0) и конечную площадь поверхности с теплоотводом (Af), чтобы сделать сценарий более понятным.
В этом уравнении As представляет собой площадь одной стороны шагового двигателя, если предположить, что двигатель представляет собой идеальный куб.
Это уравнение вводит две новые переменные: площадь поверхности применяемого радиатора и x для представления количества используемых радиаторов.
Площадь радиатора включает несколько новых переменных, которые относительно легко понять. Переменные h и l представляют общую высоту, ширину и длину радиатора. Переменная n представляет количество ребер на радиаторе, а представляет толщину ребер.
Объединение (6), (8) и (9) дает нам уравнение, в котором число радиаторов является единственной независимой переменной, для которой необходимо найти решение. Все остальные переменные можно легко измерить в вашей системе.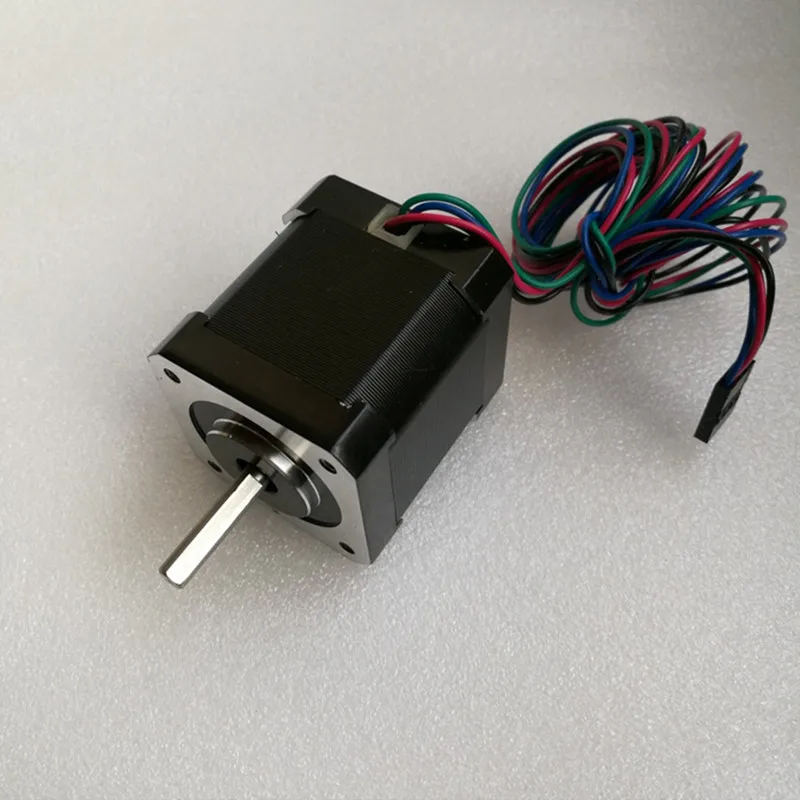
Это наше окончательное уравнение с независимой переменной (количество радиаторов, необходимых для поддержания постоянной температуры поверхности), изолированное и легко решаемое. Все другие зависимые переменные, перечисленные справа, могут быть измерены в вашей системе в соответствии с предоставленными определениями:
Определения
| ΔT1 | Начальная разница температур между поверхностью двигателя и окружающим воздухом |
| ∆T2 | Конечная разница температур между поверхностью двигателя и окружающим воздухом |
| Как | Площадь стенки одиночного шагового двигателя |
| n | Количество ребер |
| ч | Высота ребер |
| л | Длина основания радиатора |
| с | Ширина основания радиатора |
| т | Толщина ребер |
Расширение возможностей управления шаговыми двигателями в 3D-печати
Гостевой блог Яна Котарски
Теория
В сообществе 3D-печати новичкам часто трудно понять, как на самом деле работают шаговые двигатели.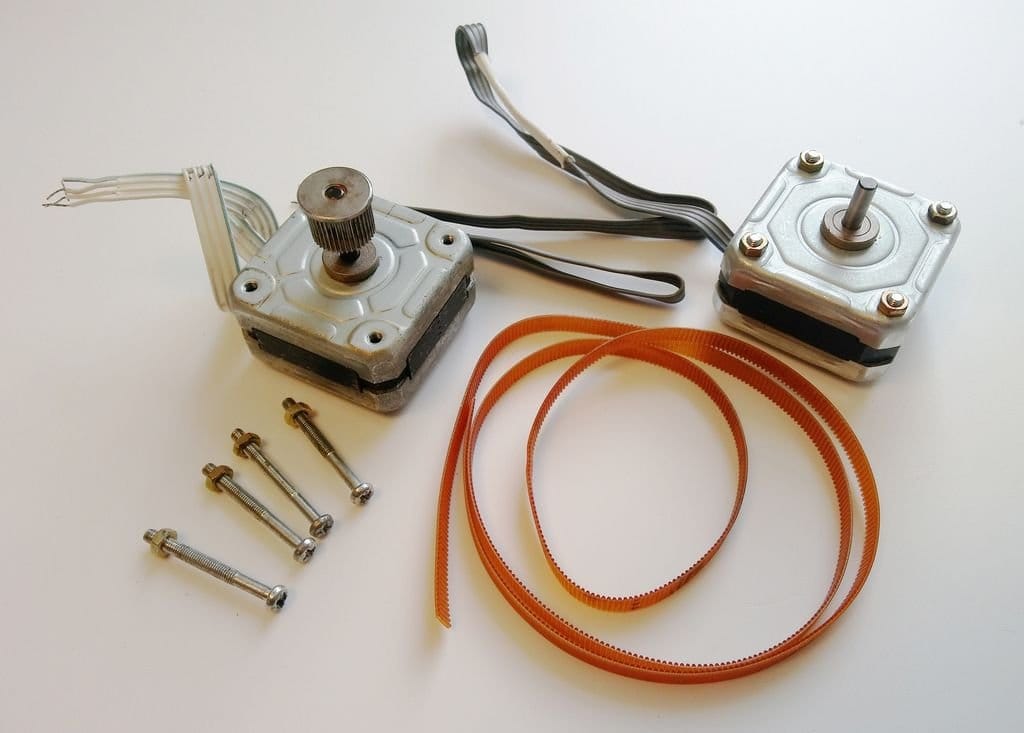 Такие вопросы, как «номинальное напряжение для моего двигателя 4,6 В, могу ли я использовать его, если мой принтер имеет блок питания 12/24 В?» и подобные всплывают время от времени.
Такие вопросы, как «номинальное напряжение для моего двигателя 4,6 В, могу ли я использовать его, если мой принтер имеет блок питания 12/24 В?» и подобные всплывают время от времени.
Это потому, что большая часть электроники, которую мы используем каждый день, использует источник постоянного напряжения с переменным током, и это то, о чем мы привыкли думать. Светодиодная лента на 12 В будет питаться от стабильного контролируемого напряжения 12 В, а потребление тока будет увеличиваться по мере увеличения количества диодов — нагрузки.
Степпер
двигатели запитываются обратным способом – ток постоянный/регулируемый (подробнее
об этом позже), а требуемое напряжение меняется вместе с нагрузкой. Это
почему в 3D печати блоки питания 12В заменили на 24В и даже выше
подачи напряжения – потому что (помимо других преимуществ) таким образом принтер может
подавать больше мощности двигателям, достигать более высоких скоростей движения и быть более
динамический, несмотря на то, что установленный ток двигателя остается на том же уровне.
Но
типичный источник питания обеспечивает постоянное напряжение. Как он преобразуется в
регулируемый, контролируемый ток? Это работа драйвера шагового двигателя, например
TMC2208.
Регулировка тока достигается с помощью метода, называемого ШИМ (широтно-импульсная модуляция). Напряжение очень быстро включается и выключается с помощью MOSFET-транзисторов, что приводит к протеканию тока на желаемом уровне. Но этот метод управления током не будет работать с простой резистивной нагрузкой — регулировка тока может быть достигнута только при возбуждении катушек — а они вместе с магнитами или другими катушками заставляют вращаться шаговый двигатель. Катушка – индуктор – имеет интересное свойство – она «замедляет» протекание тока, добавляя ему «инерции». Это означает, что если приложить напряжение, ток, протекающий через индуктор, будет расти не сразу, а медленно. То же самое происходит и при отключении напряжения — ток не сразу упадет до нуля ампер, а со временем уменьшится.
Кстати, светодиоды на самом деле тоже регулируются по току, но в случае простой светодиодной ленты для регулирования тока достаточно резистора, так что в итоге светодиодная лента работает как устройство постоянного напряжения.
Практические измерения
Описанный метод управления током может быть
четко видно на реальных измерениях:
Желтая кривая представляет ток, протекающий через катушку двигателя, голубая линия показывает включение/выключение напряжения. Это измерение было сделано в режиме ожидания, когда двигатель не вращался, а удерживал свое положение. Ток в значительной степени постоянен, а напряжение регулярно включается на короткий период времени, а затем снова отключается. Обратите внимание, что это переключение происходит более 30 000 раз в секунду!
Когда
мотор начинает двигаться, вот тогда и происходит самое интересное. Форма
форма текущей волны больше не плоская — это синусоида. Чтобы повернуть
двигатель, ток должен изменяться, чтобы чередовать магнитное поле, которое
приводит к движению. Этот принцип верен для всех бесколлекторных электродвигателей.
Этот принцип верен для всех бесколлекторных электродвигателей.
TMC2208 активно измеряет и регулирует ток, создавая синусоидальный сигнал.
Соответственно изменяется форма тока с заданной амплитудой и действующим напряжением.
Скорость вращения зависит от частоты текущей синусоиды.
Не беспокойтесь о волнистости измерения напряжения — это артефакт. Амплитуда, видимая внизу экрана, более или менее равна напряжению питания, которое я использовал (32 В). Среднеквадратичное значение является индикатором того, «сколько» эффективного напряжения подается на катушку двигателя. В этом случае измеренное/расчетное значение не очень точное, но оно показывает, что на этой скорости мы выдаем менее 40% номинального напряжения питания.
Когда мы увеличиваем масштаб, мы
хорошо видно указанное специальное свойство индуктора:
Когда напряжение включено, ток растет, но довольно медленно по сравнению с тем, как быстро растет/падает напряжение. Когда мы отключаем напряжение, ток, протекающий через катушку, падает, но опять же — довольно медленно. Прежде чем он станет слишком низким, драйвер включает питание, и ток снова увеличивается. По сути, так мы держим ток на необходимом уровне. Также обратите внимание, что время, в течение которого MOSFET-переключатель находится в открытом состоянии (как долго напряжение остается включенным), зависит от «положения» на синусоиде. Когда мы смотрим на синусоиду, мы видим области, которые изменяются медленно (вблизи вершины/вниза) и которые изменяются быстрее (около нуля по оси Y). Если мы хотим, чтобы ток следовал этой форме, нам просто нужно немного дольше подавать напряжение в «быстрой области» синусоиды!
Прежде чем он станет слишком низким, драйвер включает питание, и ток снова увеличивается. По сути, так мы держим ток на необходимом уровне. Также обратите внимание, что время, в течение которого MOSFET-переключатель находится в открытом состоянии (как долго напряжение остается включенным), зависит от «положения» на синусоиде. Когда мы смотрим на синусоиду, мы видим области, которые изменяются медленно (вблизи вершины/вниза) и которые изменяются быстрее (около нуля по оси Y). Если мы хотим, чтобы ток следовал этой форме, нам просто нужно немного дольше подавать напряжение в «быстрой области» синусоиды!
Маленький
неровности, отклонения от идеальной, гладкой формы синусоиды называются рябью и
всегда присутствуют, когда ток катушки управляется с помощью ШИМ.
Влияние нагрузки двигателя
В этот момент возникает один очень важный вопрос – что вызывает изменение требуемого напряжения (фактическая мощность, подаваемая на двигатель) при изменении нагрузки? Эта штука называется BEMF – B ack E lectro M otoric F сила – неотъемлемое свойство каждого электродвигателя. Я не хочу в этой статье вдаваться в физические подробности этого явления — проще говоря, катушка двигателя при вращении вырабатывает «встречное» напряжение, которое борется с тем напряжением, которое мы подаем от источника питания к двигатель, поэтому он называется противо-ЭДС. Чем выше скорость (или нагрузка), тем выше BEMF, с которым нам нужно бороться.
Я не хочу в этой статье вдаваться в физические подробности этого явления — проще говоря, катушка двигателя при вращении вырабатывает «встречное» напряжение, которое борется с тем напряжением, которое мы подаем от источника питания к двигатель, поэтому он называется противо-ЭДС. Чем выше скорость (или нагрузка), тем выше BEMF, с которым нам нужно бороться.
На BEMF влияют три основных фактора:
- Индуктивность катушки двигателя – чем меньше, тем лучше;
- установка тока – чем выше ток, тем мощнее двигатель, но тем больше генерируется BEMF;
- скорость/механическая нагрузка – естественно, BEMF увеличивается вместе с нагрузкой. Вот как работает бессенсорное самонаведение с использованием StallGuard — оно измеряет BEMF!
Фактическое влияние BEMF
Вкл.
На измерении ниже мы можем видеть движение с ускорением и крупные планы двух
регионы – с низкой/высокой скоростью.
Когда скорость была еще довольно низкой, у контроллера мотора все еще было достаточно запаса для плавного регулирования тока, поэтому синусоиду можно считать идеальной. Но если мы немного увеличим масштаб, то увидим, что ток больше похож на треугольник, а напряжение подается не очень точно. Это связано с тем, что у контроллера не было запаса напряжения для правильного регулирования тока, и, по сути, синусоида искажается, хотя двигатель все еще работает.
Но если мы немного увеличим масштаб, то увидим, что ток больше похож на треугольник, а напряжение подается не очень точно. Это связано с тем, что у контроллера не было запаса напряжения для правильного регулирования тока, и, по сути, синусоида искажается, хотя двигатель все еще работает.
Теперь, когда мы понимаем, как управляется шаговый двигатель, мы можем перейти к следующему пункту и ответить на последний вопрос — что происходит, когда BEMF настолько велико, что упомянутое «встречное» напряжение становится слишком близким к напряжению питания? Можно было бы догадаться, что мотор начнет терять шаги — и это правда, но не сразу! Честно говоря, я был удивлен тем, насколько хорошо драйверы и моторы справляются с экстремальными скоростями. Давайте посмотрим:
Это ток, протекающий через катушку двигателя во время полного хода с использованием источника питания 24 В. Принтер запускается из состояния покоя, затем разгоняется до 900 мм/с при 9000 мм/с 2 и затем останавливается.
Так что же происходит на самом деле? В начале драйвер способен поддерживать достоверную синусоиду, но чуть позже, когда BEMF приближается к напряжению питания, форма волны ухудшается, как мы видели выше. Но в этот момент принтер еще не достиг нужной скорости — вскоре обратное напряжение, генерируемое двигателем, стало настолько высоким, что достичь заданного значения тока было невозможно. Он падает до тех пор, пока не будет достигнута желаемая скорость, а затем амплитуда становится стабильной, но мы больше не смотрим на синусоиду — в этот момент она намного ближе к прямоугольной волне.
Эти результаты выглядят довольно плохо, но на самом деле — они в порядке! Машина работала с такими настройками больше года без проблем. Это вполне нормально для высокоскоростных приложений. Конечно, крутящий момент сильно снижается, и точность может быть не идеальной, но после замедления двигатели восстанавливают номинальный крутящий момент, и положение становится точным. 900 мм/с — это максимальная скорость, которую я считал безопасной до того, как начал терять шаги.
я
также пытался использовать необработанные данные с осциллографа для расчета и отображения
усредненное «потребление напряжения» при работе. Это оказалось немного сложнее
чем я ожидал, поэтому результаты носят лишь ориентировочный характер — вот почему
номера не представлены. В любом случае:
два графика представляют напряжение и ток с «локальным среднеквадратичным значением», которое более или менее
усредненное эффективное значение. Мы видим, что по мере увеличения скорости нам нужно
подавать все больше и больше напряжения, пока мы не достигнем предела, и в этот момент
ток немного падает. Из этих графиков можно сделать два важных вывода:
- Мы никогда не сможем обеспечить 100% напряжения питания, потому что нам нужно, чтобы ток изменялся -> нам нужно некоторое время, чтобы он упал;
- На высоких скоростях мы не можем передать полную мощность мотору.
Преимущества более высокого напряжения питания
Некоторые
из вас могли бы понять, что в большинстве измерений я использовал 32 В,
питание не 24В. Это правда — недавно я обновил свою машину до 32 В и
Это правда — недавно я обновил свою машину до 32 В и
вот почему я решил поиграть со своим осциллографом и сравнить оба
опции.
Был
это того стоит? Определенно!
С
переместите параметры, как и раньше, форма волны выглядит намного лучше и
амплитуда тока на ~60% выше, чем раньше, что означает лучшую стабильность и
более высокий запас до того, как двигатели начнут терять шаги. С другой стороны, вместо
более высокий запас прочности, я могу печатать с довольно высокими ускорениями и даже достигать
скорость 1200 мм/с! Не то, чтобы это имело большой смысл для нити
принтер.. но я очень доволен результатами.
Резюме и рекомендации
Четный
разница в несколько вольт улучшит работу нашего драйвера шагового двигателя или
позволяют нам достигать более высоких скоростей. Иногда более высокая скорость печати
снижение качества печати, но это часто не является большой проблемой и, по крайней мере,
мы можем увеличить скорость перемещения, что не только сократит время печати, но и
также полезно для настройки ретракции.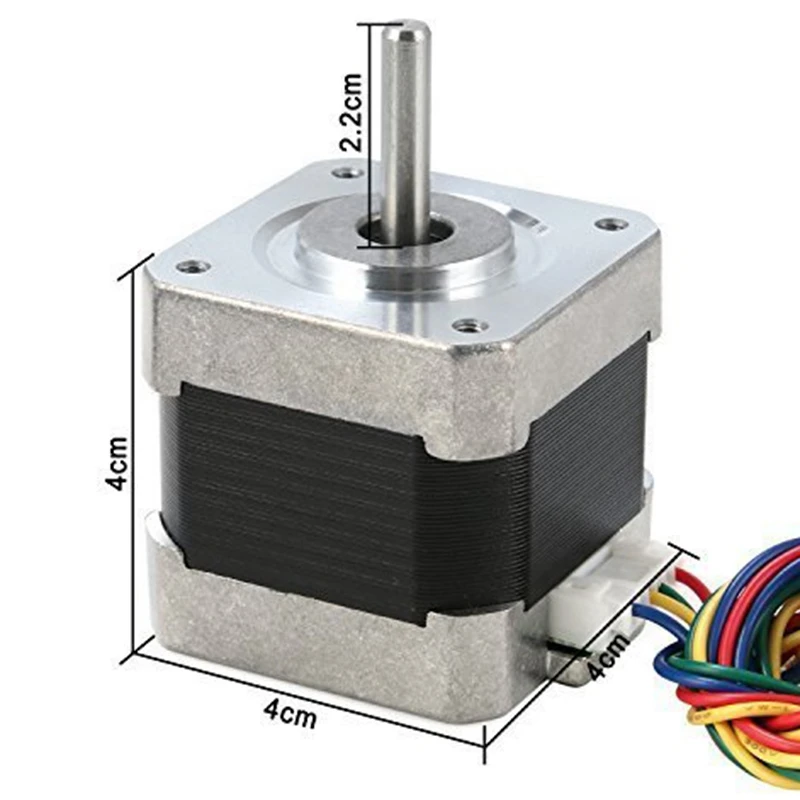
С
все знания мы получили, теперь мы можем подобрать моторы для нашей машины подробнее
уверенно. Итак:
- Номинальная индуктивность и сопротивление двигателя должны быть как можно ниже;
- Для таких драйверов, как TMC2208 или TMC2130, номинальный ток двигателя 1,5–1,7 А должен быть оптимальным;
- Для TMC2209, TMC2660 и TMC51X0 подойдут двигатели с номинальным током 2,0–2,5 А;
- Выберите как можно более высокое напряжение питания двигателя, но перепроверьте параметры ваших драйверов и материнской платы!
Лично я думаю, что в ближайшие несколько лет мы будем видеть все больше и больше 36-вольтовых, а затем и 48-вольтовых готовых материнских плат для Reprap/коммерческих 3D-принтеров, поскольку наши машины продолжают улучшаться и могут использовать повышение скорости. Единственным недостатком является то, что нагреватели обычно рассчитаны на 24 В, но, возможно, это тоже изменится! Посмотрим.
Используемое оборудование:
- Осциллограф Siglent SDS 1104X-E
- Датчик тока Hantek CC65
- Блок питания Mean Well 150 Вт
- 3D-принтер CoreXY
- Пользовательская плата TMC2208
- Нагарадж, Судхир. 2014. «Умная настройка шаговых двигателей стала проще». Технический документ Texas Instruments, литература № SLYY066C, декабрь 2014 г.
- Локридж, Джеймс. 2018. «Умная настройка для эффективного вождения шагового двигателя». Примечание по применению Texas Instruments, литература № SLVAE58, ноябрь 2018 г.
- Митра, Дипанкар. «Бессенсорное обнаружение останова с помощью DRV8889-Q1». Отчет о применении Texas Instruments, литература № SLVAEI3, январь 2020 г.
- Икер, Мэдисон и Дипанкар Митра. «Как уменьшить слышимый шум в шаговых двигателях». Отчет о применении Texas Instruments, литература № SLVAES8, май 2020 г.
- Митра, Дипанкар. «Как улучшить плавность движения и точность шаговых двигателей». Отчет о применении Texas Instruments, литература № SLOA293, сентябрь 2020 г.
- Основные сведения о двигателях переменного тока и их применении
- Основы двигателей и двигатели постоянного тока
- Управление двигателем с ориентацией на поле, Часть 1: Принципы
- Основы электродвигателей переменного, постоянного и ЕС-двигателей (часть 2)…
- Основы электродвигателей переменного, постоянного и ЕС-двигателей, часть 1 —…
- Номинальный крутящий момент
- Размер двигателя
- Количество шагов
- Из-за мотора очень сложно сбиться с пути; ультра-тихий режим
- Имеет большую площадь термопрокладки для снижения рабочей температуры
- Предотвращает сотрясение двигателя
- Поддерживает обнаружение остановки
- Поддерживает режим STEP/DIR и UART
90 PWM 3 Подробнее о 3 90 PWM 90 9000
https://en. wikipedia.org/wiki/широтно-импульсная_модуляция
wikipedia.org/wiki/широтно-импульсная_модуляция
30 июля 2021 г. /
Тринамик /
Категории: Гостевой блог, Продукты, технологии
Метки: 3D печать, гостевой блог, драйвер двигателя, технология, TMC2208
Преодоление проблем проектирования шаговых двигателей в 3D-принтерах
Дипанкар Митра, системный инженер, Texas Instruments
3D-печать — быстро развивающийся рынок со значительным потенциалом роста. 3D-принтеры создают трехмерные объекты сложной формы и геометрии путем последовательного нанесения материалов непосредственно из модели автоматизированного проектирования. Сельское хозяйство, здравоохранение, автомобилестроение, локомотивостроение и авиастроение являются одними из первых, кто применил 3D-печать для проектирования прототипов и производства. С более широким внедрением в этих отраслях растет спрос на небольшие, точные, энергоэффективные и бесшумные 3D-принтеры.
Все 3D-принтеры используют несколько шаговых двигателей для получения качественной печати. Эти шаговые двигатели перемещают платформу принтера по осям X-Y-Z, перемещают экструдер или изменяют цвет вывода на принтер. Использование высокопроизводительных драйверов шаговых двигателей может помочь двигателям принтеров работать бесшумно, точно и эффективно. В этой статье я расскажу, как найти правильные драйверы шагового двигателя для создания 3D-принтера с нуля или обновления существующего.
Эти шаговые двигатели перемещают платформу принтера по осям X-Y-Z, перемещают экструдер или изменяют цвет вывода на принтер. Использование высокопроизводительных драйверов шаговых двигателей может помочь двигателям принтеров работать бесшумно, точно и эффективно. В этой статье я расскажу, как найти правильные драйверы шагового двигателя для создания 3D-принтера с нуля или обновления существующего.
Требования к драйверу шагового двигателя 3D-принтера на системном уровне и показатели производительности
Шаговый двигатель движется дискретными шагами во время своего вращения, определяемого углом шага. Он имеет две обмотки электрического тока, каждая из которых управляется с помощью Н-моста. Как показано на рис. 1, драйвер шагового двигателя подает токовые сигналы, приближающиеся к синусоиде (синий цвет) на одну катушку и косинусоиде (красный цвет) на другую. Один (90-градусный) квадрант формы волны тока соответствует повороту шагового двигателя на один угол шага – 1,8 градуса для большинства современных гибридных шаговых двигателей.
Рисунок 1: Форма кривой тока катушки шагового двигателя
В зависимости от сложности и доступных функций один 3D-принтер может содержать от четырех до десяти шаговых двигателей. На рис. 2 показана упрощенная блок-схема 3D-принтера.
Рисунок 2: Блок-схема 3D-принтера
Давайте рассмотрим основные системные требования драйверов шаговых двигателей, используемых в 3D-принтерах.
Напряжение питания Н-моста
Автономная мощность переменного тока преобразуется преобразователями переменного тока в постоянный ток более низкого напряжения для работы Н-моста шагового драйвера. Наиболее распространенные напряжения питания постоянного тока, используемые сегодня, составляют 12 В или 24 В. При той же выходной мощности работа при 24 В вдвое меньше среднего тока по сравнению с работой при 12 В.
Некоторые производители разрабатывают свои 3D-принтеры для работы при еще более высоких номинальных напряжениях питания, таких как 36 В или 48 В. Более высокое напряжение питания при более низком среднем токе приводит к меньшим потерям при передаче и меньшему весу кабелей. Более высокое напряжение также приводит к более высокому крутящему моменту на высоких скоростях, что приводит к более высокой скорости печати.
Более высокое напряжение питания при более низком среднем токе приводит к меньшим потерям при передаче и меньшему весу кабелей. Более высокое напряжение также приводит к более высокому крутящему моменту на высоких скоростях, что приводит к более высокой скорости печати.
Номинальное напряжение питания 36 В означает, что драйвер шагового двигателя должен выдерживать напряжение не менее 45 В при максимальном допуске 25 % на шине питания. Для номинального напряжения питания 24 В должно быть достаточно драйвера шагового двигателя с абсолютным максимальным номинальным напряжением 30 В.
Несоответствие между номинальным напряжением, указанным в техническом описании шагового двигателя, и напряжением питания драйвера шагового двигателя может сбивать с толку. Вы должны помнить, что номинальное напряжение двигателя — это просто произведение его номинального тока и сопротивления обмотки. Напряжение питания шагового драйвера может безопасно превышать номинальное напряжение двигателя.
Номинальный ток шагового драйвера
В большинстве 3D-принтеров используются шаговые двигатели размера 17 Национальной ассоциации производителей электрооборудования (NEMA) с номинальным крутящим моментом от 0,3 Н·м до 0,5 Н·м. В зависимости от применения номинальный ток шагового двигателя может составлять от нескольких сотен миллиампер до 2 А, а в редких случаях и выше. Шаговые двигатели, используемые для перемещения XYZ платформы принтера или движения экструдера, как правило, рассчитаны на более высокие токи по сравнению с шаговыми двигателями, используемыми для выбора цвета.
Ограничение по току драйвера шагового двигателя должно быть выше, чем максимальное потребление тока шаговым двигателем с приемлемым коэффициентом запаса. В некоторых системах используется один и тот же драйвер двигателя для управления шаговыми двигателями как с высоким, так и с низким током. Оптимальным решением было бы использование совместимых по выводам драйверов шаговых двигателей, рассчитанных на низкие и высокие токи, для управления различными шаговыми двигателями, используемыми в системе 3D-принтера.
Температура окружающей среды и сопротивление во включенном состоянии
Большинство 3D-принтеров требуют, чтобы температура поверхности печатной платы не превышала 80°C; поэтому драйверы шаговых двигателей должны иметь хорошие тепловые характеристики. Чтобы удерживать температуру полупроводникового кристалла в допустимых пределах, драйверы шаговых двигателей с высоким сопротивлением в открытом состоянии (> 500 мОм как на стороне высокого, так и на низком уровне вместе) должны использовать большой радиатор, что увеличивает стоимость системы. Некоторые 3D-принтеры даже используют драйверы затвора с многочисленными внешними компонентами для более низких рабочих температур. Для двигателей, рассчитанных на 2 А, сопротивление во включенном состоянии, близкое к 350 мОм, в большинстве случаев позволяет вообще обойтись без радиатора.
Микрошаг, точность положения и плавность движения
В 3D-принтере качество печати зависит от точности положения шаговых двигателей, управляющих движением экструдера и платформы принтера в направлениях X-Y-Z. Работа шагового двигателя в полношаговом режиме приводит к скачку двигателя на один угол шага (в большинстве случаев на 1,8 градуса механического вращения), что приводит к перерегулированию, пульсациям крутящего момента и вибрациям. В результате большинство драйверов шаговых двигателей сегодня включают микрошаговый режим, который разбивает полный шаг на более мелкие равные сегменты и, следовательно, помогает уменьшить вибрации, плавно перемещая двигатель в его предполагаемое положение.
Работа шагового двигателя в полношаговом режиме приводит к скачку двигателя на один угол шага (в большинстве случаев на 1,8 градуса механического вращения), что приводит к перерегулированию, пульсациям крутящего момента и вибрациям. В результате большинство драйверов шаговых двигателей сегодня включают микрошаговый режим, который разбивает полный шаг на более мелкие равные сегменты и, следовательно, помогает уменьшить вибрации, плавно перемещая двигатель в его предполагаемое положение.
Микрошаг 1/16 уровня обычно считается стандартом в большинстве устаревших систем 3D-принтеров. Некоторые из новейших драйверов содержат микрошаги с шагом 1/32, 1/64, 1/128 и 1/256 для максимальной точности позиционирования и плавности движения. Однако более высокий микрошаг приведет к лучшей точности позиционирования только в том случае, если крутящий момент на микрошаг больше, чем крутящий момент, необходимый для перемещения нагрузки.
Согласование тока между каналами драйвера шагового двигателя влияет на общую точность позиционирования. Если ток одной катушки представляет собой чистую синусоидальную волну, а ток другой катушки представляет собой чистую косинусоидальную волну, это гарантирует, что выходной ток будет постоянным, а угол приращения одинаковым на каждом микрошаге. Любое отклонение от идеальных значений вызовет неравномерность приращений углового положения и приведет к неравномерному выходному крутящему моменту, неточностям положения и увеличению вибраций двигателя.
Если ток одной катушки представляет собой чистую синусоидальную волну, а ток другой катушки представляет собой чистую косинусоидальную волну, это гарантирует, что выходной ток будет постоянным, а угол приращения одинаковым на каждом микрошаге. Любое отклонение от идеальных значений вызовет неравномерность приращений углового положения и приведет к неравномерному выходному крутящему моменту, неточностям положения и увеличению вибраций двигателя.
Выбор режима затухания драйвера также играет большую роль в определении точности системы. Любая пульсация текущей формы сигнала является отклонением от желаемой формы и проявляется в виде вибрации и плохой точности. Если возможно, работа шагового двигателя в режиме медленного затухания вместо быстрого или смешанного затухания уменьшит пульсации. Однако из-за противоэлектродвижущей силы формы сигналов тока с медленным затуханием искажаются при высоких рабочих скоростях. Таким образом, режим медленного затухания, который может адаптироваться к высоким скоростям, является лучшим способом повышения точности. Плавная работа шагового двигателя должна привести к монотонному графику точности позиционирования, показанному на рисунке 3а, а не к резкому изменению угла шага, показанному на рисунке 3b.
Плавная работа шагового двигателя должна привести к монотонному графику точности позиционирования, показанному на рисунке 3а, а не к резкому изменению угла шага, показанному на рисунке 3b.
Рисунок 3a: Хорошая точность позиционированияРисунок 3b: Плохая точность позиционирования
Слышимый шум
3D-принтеры, особенно старые модели, могут быть настолько громкими, что может быть трудно находиться в одной комнате во время работы принтера. Шум в основном исходит от вентиляторов, шаговых двигателей и других движущихся механических частей, поэтому могут потребоваться дорогостоящие методы шумоподавления, такие как резиновые изоляторы, которые не устраняют шум полностью. Драйверы шагового двигателя более высокого качества могут помочь значительно снизить шум двигателя, что сводит к минимуму уровень шума, создаваемого принтером.
Режим медленного затухания обеспечивает наименьший уровень шума двигателя за счет сведения к минимуму пульсаций тока. Шаговые режимы с низким разрешением, такие как полный или половинный шаг, вызывают перерегулирование ротора и колебания вокруг следующего положения, что приводит к механическим вибрациям и шуму. Микрошаговый режим резко снижает перерегулирование и недорегулирование, что приводит к гораздо более тихой работе. Кроме того, использование эффективной частоты шага за пределами слышимого диапазона частот (примерно 20 кГц) значительно снижает шум, исходящий от шаговых двигателей.
Микрошаговый режим резко снижает перерегулирование и недорегулирование, что приводит к гораздо более тихой работе. Кроме того, использование эффективной частоты шага за пределами слышимого диапазона частот (примерно 20 кГц) значительно снижает шум, исходящий от шаговых двигателей.
Обнаружение остановки
Большинство 3D-принтеров включают в себя компонент, называемый конечным упором. Определяя положение двигателя, концевые упоры гарантируют, что печатающая головка остановится, когда она достигнет конечной точки движения в заданном направлении. Большинство торцевых упоров либо механические, либо оптические. К сожалению, оптические концевые упоры имеют низкую точность и сложны в настройке, а механические концевые упоры могут преждевременно изнашиваться и требуют периодического обслуживания. Эти внешние компоненты, предназначенные для контроля положения двигателя, увеличивают общую стоимость системы. Кроме того, некоторые системы сильно перегружают двигатель за пределами желаемой конечной точки, чтобы обеспечить достижение конечной точки, что снижает эффективность системы и вызывает слышимый шум и механические неисправности.
Бессенсорный метод обнаружения останова, встроенный в драйвер шагового двигателя, может заменить концевые упоры и решить эти проблемы. Схема обнаружения опрокидывания должна надежно определять конечную точку двигателя при изменении напряжения питания, температуры, скорости двигателя и параметров двигателя. Встроенное бессенсорное обнаружение опрокидывания также обеспечивает немедленную реакцию при возникновении опрокидывания по сравнению с решениями с датчиками положения, для которых требуется механизм тайм-аута.
Texas Instruments предлагает семейство драйверов шаговых двигателей, специально разработанных для 3D-принтеров нового поколения. Интеллектуальный режим управления пульсацией в этих драйверах работает с медленным затуханием, но также адаптируется к высокоскоростной работе, обеспечивая бесшумные и точные 3D-принтеры. Драйверы имеют микрошаговый уровень до 1/256, что обеспечивает превосходную регулировку тока. Согласование тока между каналами ±2,5% также помогает достичь высокой точности позиционирования.
В частности, DRV8424 и DRV8434 обеспечивают сопротивление во включенном состоянии 330 мОм (рассчитано на 2,5 А), а DRV8426 предлагает сопротивление 900 мОм (рассчитано на 1,5 А). Все три устройства совместимы по выводам, что добавляет гибкости при выборе драйвера шагового двигателя.
DRV8434S (с последовательным периферийным интерфейсом) и DRV8434A (с аналоговым интерфейсом ввода/вывода общего назначения) имеют функцию обнаружения опрокидывания без датчика, что устраняет необходимость в концевых упорах. Сопротивление 330 мОм во включенном состоянии также подходит для конструкций без радиаторов.
Семейство устройств доступно как в термоусадочном тонком малогабаритном корпусе (HTSSOP), так и в компактном корпусе без выводов (QFN) размером 4 мм на 4 мм, что помогает разработчикам найти компромисс между размером решения и тепловым производительность.
Использование драйверов шаговых двигателей с правильным набором функций может значительно уменьшить звуковой шум, повысить точность движения и повысить энергоэффективность 3D-принтеров. Драйверы шаговых двигателей, такие как DRV8424, DRV8426, DRV8434S и DRV8434A, обеспечивают разработчикам 3D-принтеров почти бесшумную работу.
Драйверы шаговых двигателей, такие как DRV8424, DRV8426, DRV8434S и DRV8434A, обеспечивают разработчикам 3D-принтеров почти бесшумную работу.
Дополнительные ресурсы

Вам также может понравиться:
Какой шаговый двигатель/драйвер лучше всего подходит для вашего 3D-принтера? – 3D Printerly
Если вам интересно, какой шаговый двигатель/драйвер лучше всего подходит для вашего 3D-принтера, вы обратились по адресу. Это довольно упускаемая из виду часть 3D-принтера, и она заслуживает более взвешенного решения, а не просто придерживаться того, что поставляется с вашим принтером.
Многие люди сообщают об улучшении отпечатков после установки более качественного шагового двигателя на их 3D-принтер. Какой из них лучше всего подходит для вашего 3D-принтера?
Какой из них лучше всего подходит для вашего 3D-принтера?
Для такой важной части 3D-принтера я задавался вопросом, какой шаговый двигатель лучше, поэтому я создал этот пост, чтобы узнать это, поэтому читайте ответы.
Для людей, которые пришли за быстрым ответом, лучшим шаговым двигателем для вашего 3D-принтера будет мотор StepperOnline NEMA 17. Он высоко оценен на Amazon и занимает первое место в списке креплений для электродвигателей. Низкий уровень шума, долгий срок службы, высокая производительность и отсутствие люфтов!
Многие описывают его как мотор, работающий по принципу «подключи и работай», но он требует некоторых знаний, но его установка не займет много времени. После того, как вы установите этот шаговый двигатель, любые проблемы с проскальзыванием, которые у вас были ранее, должны быть легко решены.
Если вы ищете лучший драйвер шагового двигателя, я бы выбрал драйвер шагового двигателя BIGTREETECH TMC2209 V1.2 от Amazon. Это значительно снижает шум в 3D-принтерах и обеспечивает более плавные движения в целом.
Теперь давайте рассмотрим, что делает шаговый двигатель таким важным.
Каковы ключевые функции шагового двигателя?
Под капотом каждого 3D-принтера вы найдете шаговый двигатель.
Правильное определение шагового двигателя — это бесщеточный электродвигатель постоянного тока , который делит полный оборот на равное количество шагов. Положение двигателя можно приказать перемещать и удерживать на определенных шагах и использовать с желаемым крутящим моментом и скоростью.
Проще говоря, шаговый двигатель — это то, что материнская плата использует для связи с двигателями вашего 3D-принтера, чтобы заставить его двигаться вокруг различных осей. Он обеспечивает точность, скорость и позиционирование движения объектов, поэтому является очень важным компонентом принтера.
Причина, по которой шаговые двигатели используются в 3D-принтерах, заключается в их широком спектре преимуществ, таких как низкая стоимость, высокий крутящий момент, простота, низкие эксплуатационные расходы, высокая надежность и возможность работы практически в любых условиях.
Также с технической стороны они очень надежны, потому что в двигателе нет контактных щеток, а это означает, что срок службы двигателя зависит исключительно от долговечности подшипника.
Шаговые двигатели также используются в медицинских инструментах, гравировальных станках, текстильном оборудовании, упаковочных машинах, станках с ЧПУ, робототехнике и многом другом.
Что делает шаговый двигатель лучше других?
Теперь важно знать, что шаговый двигатель может быть разных размеров, стилей и характеристик.
Для нас важны те факторы, которые лучше всего подходят именно для 3D-принтера. Поскольку нам нужно учитывать, какую работу будет выполнять двигатель, мы принимаем во внимание несколько вещей.
Основными факторами, которые делают шаговый двигатель лучше другого, являются:
Номинальный крутящий момент
Большинство шаговых двигателей имеют номинальный крутящий момент, который примерно соответствует мощности двигателя. Обычно, чем больше размер двигателя, тем больше номинальный крутящий момент у вас будет, потому что они имеют лучшую способность отдавать мощность.
Обычно, чем больше размер двигателя, тем больше номинальный крутящий момент у вас будет, потому что они имеют лучшую способность отдавать мощность.
У вас есть 3D-принтеры меньшего размера, такие как Prusa Mini, для которых потребуется меньший крутящий момент, чем, скажем, Anycubic Predator Delta Kossel, поэтому не забывайте о размере вашего принтера.
Размер двигателя
У вас есть широкий диапазон размеров шаговых двигателей, но многие из них определенно могут быть слишком мощными для простого 3D-принтера, который не требует слишком большой производительности.
Для 3D-принтеров мы обычно выбираем NEMA 17 (размеры лицевой панели 1,7 на 1,7 дюйма), потому что они достаточно велики, чтобы выполнять работу.
Обычно двигатели NEMA большего размера используются в продуктах, требующих промышленного применения, или в станках с ЧПУ. Имейте в виду, что NEMA просто описывает размер двигателя, а не другие его характеристики. Кроме того, два двигателя NEMA 17 могут быть очень разными и не обязательно взаимозаменяемыми.
Счетчик шагов
Счетчик шагов — это то, что дает нам необходимую точность с точки зрения разрешения движения или позиционирования.
Мы называем это числом шагов на оборот, и оно может варьироваться от 4 до 400 шагов, при этом общее число шагов равно 24, 48 и 200. 200 шагов на оборот соответствует 1,8 градусам на шаг
Для вас высокое разрешение, вам придется пожертвовать скоростью и крутящим моментом. По сути, двигатель с большим количеством шагов будет иметь более низкие обороты, чем другой двигатель с меньшим количеством шагов сопоставимого размера.
Если вам нужна более высокая частота шагов для эффективного вращения двигателей, потребуется больше мощности, чтобы крутящий момент был ниже, и наоборот. Поэтому, если вам нужна высокая точность движения, вам понадобится большое количество шагов, что уменьшит величину крутящего момента, который у вас есть.
Лучшие шаговые двигатели, которые вы можете купить сейчас
Шаговый двигатель NEMA-17
StepperOnline Двигатель NEMA 17, рекомендованный в начале этого поста, является отличным выбором для шагового двигателя. Тысячи счастливых клиентов с большим успехом использовали этот шаговый двигатель благодаря его высокому качеству и гибкой настройке.
Тысячи счастливых клиентов с большим успехом использовали этот шаговый двигатель благодаря его высокому качеству и гибкой настройке.
Он поставляется аккуратно упакованным и представляет собой биполярный двигатель на 2 А с 4 проводами и кабелем/разъемом длиной 1 метр. Единственным недостатком здесь являются несъемные кабели. Обратите внимание, что цвета кабелей не обязательно означают, что они являются парой.
Чтобы определить пары проводов, нужно прокрутить вал, затем коснуться двух проводов вместе и снова прокрутить. Если вал было труднее вращать, эти два провода составляют пару. Тогда два других провода составляют пару.
После того, как вы установите этот шаговый двигатель, ваша производительность станет непревзойденной и стабильной на долгие годы.
Usongshine NEMA 17 Motor — еще один вариант, который пользуется популярностью у пользователей 3D-принтеров и немного меньше, чем предыдущий вариант. Этот шаговый двигатель с высоким крутящим моментом изготовлен из высококачественной стали и имеет отличные характеристики.
Несколькими преимуществами этого шагового двигателя являются его эффективная теплопроводность и контроль качества каждого проданного шагового двигателя. Вы получаете шаговый двигатель (38 мм), 4-контактный кабель и разъем — мощное и бесшумное устройство, которое поможет вам в вашем путешествии по 3D-печати.
Проводка лучше проложена: черный и красный провода — это A+ и B+, а зеленый и синий — A- и B-.
Обслуживание клиентов также находится на переднем крае их продукта, поэтому вы можете быть спокойны после покупки.
Даже при скорости печати 120 мм/с и выше этот шаговый драйвер каждый раз обеспечивает потрясающую производительность.
Лучший драйвер шагового двигателя для 3D-принтеров (обновление)
Kingprint TMC2208 V3.0
Существует множество драйверов шагового двигателя, которые вы можете приобрести для своего 3D-принтера, но вам нужен тот, который хорошо работает для вашей конкретной машины.
Шаговый демпфер Kingprint TMC2208 V3. 0 с драйвером радиатора (4 шт.) от Amazon — отличный выбор, который нравится многим пользователям. Один пользователь сказал, что он перешел от стандартных драйверов к этим, и разница в шуме и управлении была поразительной.
0 с драйвером радиатора (4 шт.) от Amazon — отличный выбор, который нравится многим пользователям. Один пользователь сказал, что он перешел от стандартных драйверов к этим, и разница в шуме и управлении была поразительной.
Раньше у него был очень шумный 3D-принтер, который также дрожал в процессе печати, но теперь печать бесшумная и очень плавная. У них хорошая большая открытая площадь радиатора, поэтому установка немного упрощается.
Разница между этими и классическими степперами 4988 огромна. Еще одна приятная особенность, которая была добавлена к этому, — это разъемы для доступа к UART, поэтому вам не нужно припаивать их самостоятельно.
Один пользователь упомянул, как она не понимала, что 3D-печать может быть настолько бесшумной, что может существенно изменить шум. Если ваш 3D-принтер сильно вибрирует, даже до такой степени, что ваш стол вибрирует, как другой пользователь, вы захотите установить их как можно скорее.
После установки самой громкой вещью на 3D-принтерах стали вентиляторы.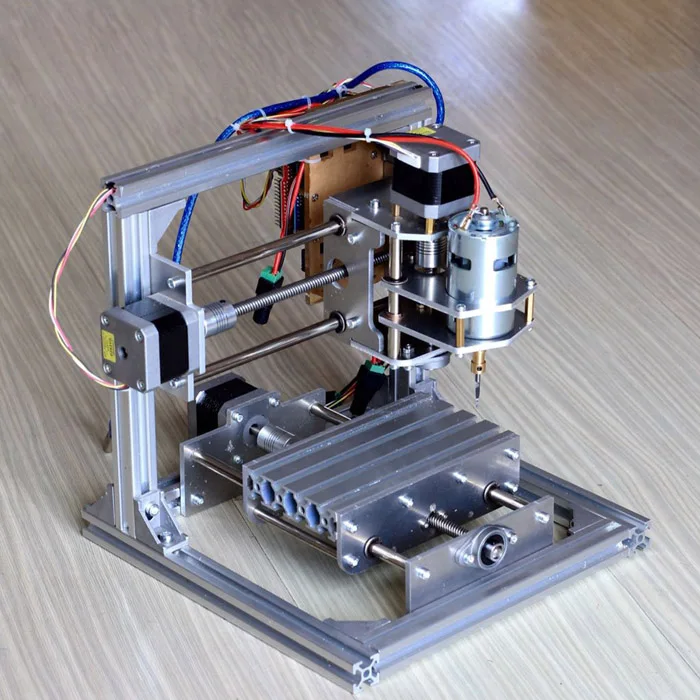
BIGTREETECH TMC2209 Драйвер шагового двигателя V1.2
BIGTREETECH — очень известная компания, занимающаяся производством аксессуаров для 3D-принтеров, которая производит действительно надежные и полезные детали. Если вы ищете одни из лучших драйверов шаговых двигателей, вы можете приобрести драйвер шагового двигателя BIGTREETECH TMC2209 V1.2 от Amazon.
Имеют пиковый драйвер 2,8 А, предназначенный для материнских плат SKR V1.4 Turbo, SKR V1.4, SKR Pro V1.2, SKR V1.3, в комплекте 2 штуки.
TMC2209 является усовершенствованием по сравнению с TMC2208, поскольку он имеет увеличенный ток 0,6–0,8 А, но также увеличивает функцию обнаружения опрокидывания.