Содержание
Шаговые двигатели с энкодером ШД42
Основные характеристики
Основные характеристики
| Полный шаг двигателя, град | 1,8 |
|---|---|
| Погрешность углового шага, град | ±0,09 |
| Радиальное биение вала не более, мм | 0,02 |
| Осевое биение вала не более, мм | 0,08 |
| Максимально допустимая радиальная нагрузка на вал на расстоянии 20 мм от фланца, Н | 28 |
| Максимально допустимая осевая нагрузка на вал, Н | 10 |
Скачать паспорт
Скачать описание
Заказать
Описание шаговых двигателей с энкодером ШД42
Шаговые двигатели ШД42‑03Э, ШД42‑06Э и ШД42‑08Э оснащены встроенным оптическим
инкрементным энкодером с разрешением 1000 имп/оборот.
Шаговые двигатели серии ШД42 выполнены в одном из самых распространенных типоразреров стандарта NEMA
17 со стороной
фланца 42 мм.
Данные оптического энкодера могут использоваться блоком управления для коррекции угла поворота,
контроля за скоростью
и возможным пропуском шагов вследствие превышения момента нагрузки.
Значительный крутящий момент и встроенный энкодер позволяют использовать эти двигатели в устройствах
точного позиционирования, в аналитическом приборостроении.
Также они могут использоваться в микроманипуляторах, устройствах подачи растворов, полуавтоматах
многопараметрового
контроля, оборудовании для отбора проб, автоматических анализаторах, перемешивающих устройствах и
приборах для анализа
нефтепродуктов.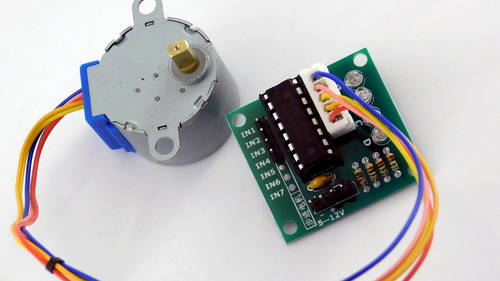
Технические характеристики
| Модель | Рабочий ток/ фаза | Крутящий момент 1 | Скорость вращения | Длина | Вес |
|---|---|---|---|---|---|
| А | Н*м | об/мин | мм | кг | |
| ШД42-03Э | 2,3 | 0,3 | 1800 | 61 | 0,3 |
| ШД42-06Э | 0,6 | 76 | 0,5 | ||
| ШД42-08Э | 0,8 | 82 | 0,55 |
1Максимальный квазистатический синхронизирующий момент
Габаритные и присоединительные размеры шаговых двигателей с энкодером ШД42
Назначение контактов энкодера и фаз двигателя
Сигналы энкодера
С этим товаром покупают
SMD‑1.
 6DIN
6DINДрайверы шаговых двигателей
подробнее
Редуктор EH042
Планетарный безлюфтовый редуктор
подробнее
MDR-40-24 MW
Источник питания
подробнее
Муфта SJC
Безлюфтовая упругая муфта
подробнее
 6DIN
6DIN Задать вопрос
Хотите узнать дополнительную информацию о продукции — задайте вопрос. Наш специалист свяжется с вами в ближайшее время.
Шаговые двигатели с энкодером ШД86
Основные характеристики
Основные характеристики
| Полный шаг двигателя, град | 1,8 |
|---|---|
| Погрешность углового шага, град | ±0,09 |
| Количество выходных каналов | 2 (А, В) или 3 (А, В, I) |
| Разрешение энкодера, им/об | до 1024 |
| Радиальное биение вала не более, мм | 0,02 |
| Осевое биение вала не более, мм | 0,08 |
| Максимально допустимая радиальная нагрузка на вал на расстоянии 20 мм от фланца, Н | 220 |
| Максимально допустимая осевая нагрузка на вал, Н | 60 |
Скачать паспорт
Скачать описание
Заказать
Описание шаговых двигателей с энкодером ШД86
Шаговые двигатели (NEMA 34) с энкодером – предназначены для преобразования электрической энергии во вращательное движение с точным позиционированием. Укомплектованный энкодером шаговый двигатель в совокупности с необходимым органом управления представляет собой сервопривод.
Укомплектованный энкодером шаговый двигатель в совокупности с необходимым органом управления представляет собой сервопривод.
В ассортименте продукции нашей компании, представлены три шаговых двигателя с энкодером, типоразмера NEMA34 (размер фланца 86х86мм). Различие между тремя двигателями в величине крутящего момента, от 34 до 87 кгс*см.
При работе с шаговыми двигателями, оснащенными оптическим энкодером, пользователь получает ряд преимуществ:
- Отслеживание точности позиционирования, до 1024 импульса на один оборот вала
- Отслеживание направления вращения
- Получение информации о возможном пропуске шагов (после анализа данных полученных от энкодера)
- Правильное управление током двигателя в приводах с обратной связью могут устранить проблемы среднечастотного резонанса
Для полноценной работы с шаговыми двигателями серии ШД86‑Э, необходимо применять соответствующие драйверы и контроллеры.
Технические характеристики двигателей
| Модель | Ток фазы, А | Количество фаз | Сопротивление (фаза), Ом | Индуктивность (фаза), мГн | Крутящий момент, кгс*см | Длина, мм | Момент инерции ротора, г*см2 |
|---|---|---|---|---|---|---|---|
| ШД8665‑2.8Э | 2,8 | 4 | 1,4 | 3,9 | 34 | 65 | 1000 |
| ШД8680‑4.2Э | 4,2 | 4 | 0,75 | 3,4 | 46 | 80 | 1400 |
ШД86118‑6. 0Э 0Э | 6,0 | 2 | 0,6 | 6,5 | 87 | 118 | 2700 |
Технические характеристики энкодеров
- Количество выходных каналов: 2 (А, В) или 3 (А, В, I)
- Разрешение энкодера до 1024 им/об
- Рабочая температура: от -40° C до 100° C
- Напряжение питания (Vcc): -0,5В до 7В
- Выходное напряжение: от 0,5В до Vcc
- Выходной ток на канал: от 1,0 мА до 5 мА
Габаритные размеры энкодеров
Для энкодера с одиночным
TTL-сигналом
Для энкодера с дифференциальным
выходным сигналом
Форма выходных сигналов
Направление вращения:
Когда кодовое колесо вращается по часовой
стрелке (если смотреть с торца энкодера),
ведущим становится канал “А”, канал “В” —
ведомый. Если кодовое колесо вращается против
Если кодовое колесо вращается против
часовой стрелки, то ведущим становится канал
“В”, а канал “А” ведомым.
Индексная ширина импульса (Pо) составляет
поворот кодового колеса на 90 градусов.
С этим товаром покупают
SMSD‑4.2LAN
Ethernet контроллер шаговых двигателей
подробнее
SMSD‑8.0LAN
Ethernet контроллер шаговых двигателей
подробнее
SMD‑4.
2DIN ver.2Драйвер шаговых двигателей
подробнее
SMD‑8.0DIN
Драйвер шаговых двигателей
подробнее
 2DIN ver.2
2DIN ver.2 Задать вопрос
Хотите узнать дополнительную информацию о продукции — задайте вопрос. Наш специалист свяжется с вами в ближайшее время.
Шаговые двигатели Leadshine со встроенным энкодером серии ES-M
На главнуюКаталог товаровСервоприводУпрощенные сервоприводы Leadshine Шаговые двигатели Leadshine со встроенным энкодером серии ES-M
Шаговые двигатели Leadshine со встроенным энкодером серии ES-M
Шаговые двигатели Leadshine серии ES-M поставляются со встроенным инкрементальным энкодером с разрешением 1000 имп/об. Шаговые двигатели этой серии имеют типоразмеры NEMA 23 (57 мм) и 34 (86 мм) и обладают крутящим моментом до 8 Н·м. Данная серия была разработана специально для использования в комплексе с серводрайверами Leadshine серии ES-D, параметры входного напряжения которых 100 В постоянного тока или 80 В переменного тока. При использовании с серводрайверами серии ES-D устраняются потери шага, автоколебания, возможность перерегулирования и задержки по времени, при этом обеспечивается высокий крутящий момент, плавное движение и низкий уровень шума.
Данная серия была разработана специально для использования в комплексе с серводрайверами Leadshine серии ES-D, параметры входного напряжения которых 100 В постоянного тока или 80 В переменного тока. При использовании с серводрайверами серии ES-D устраняются потери шага, автоколебания, возможность перерегулирования и задержки по времени, при этом обеспечивается высокий крутящий момент, плавное движение и низкий уровень шума.
Особенности модели
|
|
• Шаговые двигатели типоразмеров NEMA 23 (57 мм) и 34 (86 мм).
|
Схема подключения шагового двигателя ES-M и серводрайвера ES-D
- Описание
- Характеристики
- Информация для заказа
- Загрузки
При использовании с серводрайверами Leadshine ES-D шаговые двигатели серии ES-M могут обеспечить высокий крутящий момент для применения в различных приложениях, имеющих систему управления движением. Шаговые двигатели этой серии являются идеальным решениям для увеличения технических показателей и производительности систем с шаговыми двигателями без обратной связи, или могут заменить многие бесщёточные электродвигатели переменного тока в системах с сервоуправлением, требующих высокий крутящий момент при низкой скорости. Шаговые двигатели Leadshine серии ES-M также могут управляться с помощью обычного шагового привода без обратной связи. С помощью встроенного энкодера с высоким разрешением, они могут обеспечить управление положением в режиме реального времени, при использовании контроллера движения, ПЛК или любого другого внешнего устройства. Шаговые двигатели Leadshine серии ES-M нашли свое применение в области автоматизации производства, медицинской, полупроводниковой и упаковочной промышленности, электронном оборудовании и других приложениях.
Шаговые двигатели Leadshine серии ES-M нашли свое применение в области автоматизации производства, медицинской, полупроводниковой и упаковочной промышленности, электронном оборудовании и других приложениях.
Габаритные размеры шаговых двигателей ES-M
| ES | M | 3 | 23 | 09 |
| Серия | Тип шагового двигателя M: стандартная модель | Количество фаз 2: 2 фазы 3: 3 фазы | Типоразмер 23: NEMA 23 (57 мм) 24: NEMA 24 (60 мм) 34: NEMA 34 (86 мм) | Момент двигателя 09: 0,9 Н·м 15: 1,5 Н·м 20: 2,0 Н·м 30: 3,0 Н·м 40: 4,0 Н·м 80: 8,0 Н·м |
| Общий каталог по упрощенным сервоприводам Leadshine (ENG) | |
| Техническое описание шаговых двигателей серии ES-M (ENG) |
Подробнее о моделях шаговых двигателей Leadshine серии ES-M
| Модель | Количество фаз | Типоразмер | Удерживающий момент, Н·м | Соответствие серводрайверов |
| ES-M32309 | 3 | NEMA 23 | 0,9 | ES-D508 |
| ES-M32320 | 3 | NEMA 23 | 2,0 | ES-D508 |
| ES-M22415 | 2 | NEMA 23 | 1,5 | ES-D808/ES-D1008 |
| ES-M22430 | 2 | NEMA 24 | 3,0 | ES-D808/ES-D1008 |
| ES-M23440 | 2 | NEMA 34 | 4,0 | ES-D808/ES-D1008 |
| ES-M23480 | 2 | NEMA 34 | 8,0 | ES-D808/ES-D1008 |
Рекомендуемые товары:
Шаговые двигатели Leadshine серии ES-M32309
Шаговые двигатели Leadshine серии ES-M32320
Шаговые двигатели Leadshine серии ES-M22415
Шаговые двигатели Leadshine серии ES-M22430
Шаговые двигатели Leadshine серии ES-M23440
Шаговые двигатели Leadshine серии ES-M23480
Серводрайверы Leadshine серии ES-D508
Серводрайверы Leadshine серии ES-D808
Серводрайверы Leadshine серии ES-D1008
Сага о абсолютном энкодере и шаговом двигателе
Техничка
Подпишитесь на автора
Подписаться
Не хочу
42
Давно я тут не писал постов про принтеры и электронику, но тут назрела тема использования абсолютного энкодера и попытке сделать вменяемое упралвение шаговым двигателем с рассчётом на точность позиционирования (не путать с повторяемостью).
В качестве подопытного было приобретено несколько разных магнитных энкодеров наподобие тех, что используются в таких проектах как mechaduino (или его китайская инкарнация как MSK Servo42) или же в системах стабилизации камер (внезапно там используются те же магнитные энкодеры). В итоге у меня оказалось два их от разных производителей:
- AS5048A с разрешением 12bit (если пересчитать в угол по нехитрой формуле 360/2**12 ~ 0.08789 градуса)
- TLE5012b с разрешением 15bit (опять же если пересчитать в угол то 360/2**15 ~ 0.01099 градуса)
В итоге я остановился на втором варианте, так как его разрешения хватает что бы легко ловить повороты даже для двигателя в 400 шагов на оборот при 32 микрошаге (а это получится примерно так 360/(400*32) ~ 0.028125 градуса), хотя это уже и экстремальный вариант.
На макетке была собрана конструкция из stm32f103c8t6 aka bluepill энкодера и драйвера шагового двигателя tmc2130 (взял то что было под руками).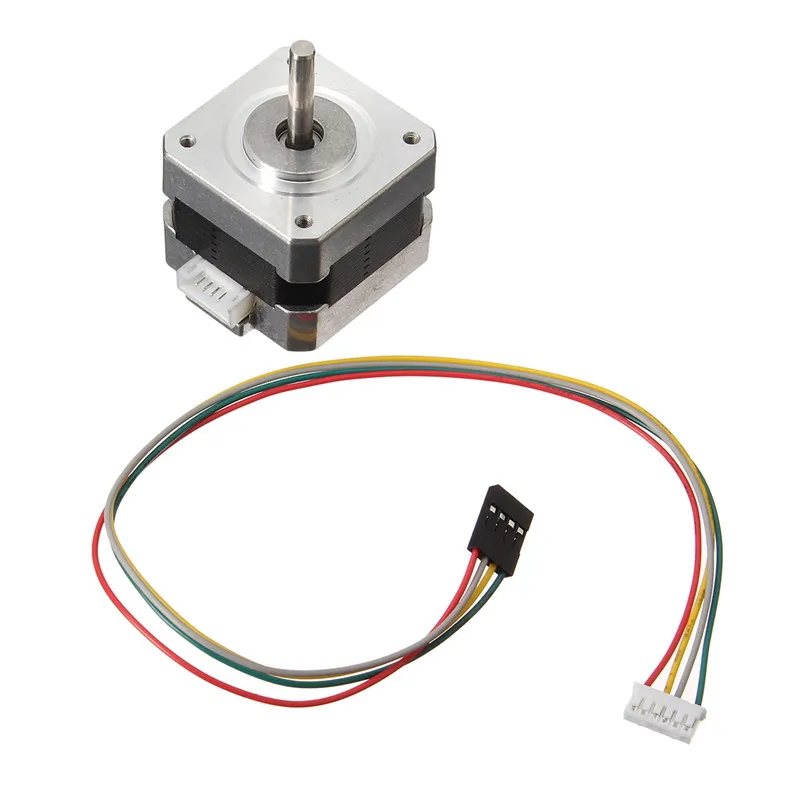 Всё это счастье было запрограммировано на довольно простые действия:
Всё это счастье было запрограммировано на довольно простые действия:
- stm32 имеет прерывания на трех пинах которые подключены к Step/Dir/Enable на плате управления принтером
- при получении сигналов на Step/Dir/Enable производится stm32 делает шаг через tmc2130
- после завершения шага (если успевает) считывает положение двигателя через энкодер tle5012b (на валу двигателя помещён магнит)
- stm32 печатает в UART инфу о количестве шагов, микрошаге, количесве оборотов и текущем угле поворота двигателя (энкодер таки абсолютный и умеет считать обороты)
Дальше у меня возникла идея проверить насколько точно шаговик встаёт по шагам. Для этого в управляющей плате принтера (которая тоже stm32 но пожирнее) были выставлены виртуальные 80 steps/mm для оси X (в принципе это значение стандартное для 20 зубой шпули для GT2) а драйвер двигателя был выставлен в 16 микрошаг (двигатель у меня 1.8 градуса, 200 шагов на оборот, и как следствия с 16 микрошагом каждый шаг соответсвует 360/(200*16) = 0.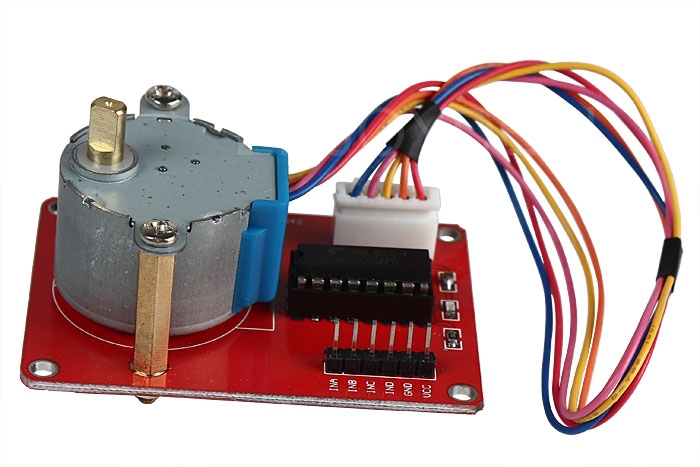 1125 градуса, запомним эту цифру). Я решил посмотреть как у нас зависит точность выставления угла поворота от скорости принтера (а как следствие и точность).
1125 градуса, запомним эту цифру). Я решил посмотреть как у нас зависит точность выставления угла поворота от скорости принтера (а как следствие и точность).
Как происходило тестирование:
- Был выбран набор скоростей: 10, 25, 50, 75, 100, 125, 150, 200, 250 мм/с
- Для каждой скорости передвижение с X0 до X160 и обратно и ожидание в крайних положения по 2 секунды (это 4 оборота движка в одну строну и в другую) повторялось по 25 раз
- Данные с энкодера писались в лог (скриптик с сериал консоли всё писал в файлики)
В итоге получилось довольно занятная картинка:
На картинке выше нарисована статистика собранная по каждой скорости в виде так называемого boxplot (прямоугольник это все значения которые были в измерениях и лежат в пределах одного стандартного отклонения, зеленая линия это среднее значение, оражевая линия это медиана). На картинке нарисовано отклонение от значения медианы для каждой измеренной точки для каждой скорости. Как её интерпретировать:
Как её интерпретировать:
- На низких скоростях (до 50 мм/с), у нас повторяемость очень неплохая, на уровне погрешности измерения энкодера
- На скорости 75мм/с (а это у нас ~1.875 оборота в секунду) ошибка повторяемости позиционирования шаговика становится сравнимой с одним микрошагом
- На скоростях 100, 125, 150 и 200 мм/с у нас ошибка повторяемости позиционирования шаговика снова становится сравнимой с погрешностью датчика угла поворота (особенность драйвера tmc2130, для него это другой режим работы и он пытается делать точное позиционирование)
- А вот на скорости в 250мм/с система идёт в разнос и повторяемость падает до ~0.7 градусов (что примерно 7 шагов при дроблении 1/16, или если пересчитать в мм то это будет ~0.1 мм в среднем)
Но это если речь идёт о повторяемости а не о точности. А это разные понятия. Так что теперь поговрим про точность. Будем считать, как это далают прошивки большниства принтеров, что перемещение на один микрошаг у нас всегда одианково (в данном случае это 0. 1125 градуса или 0.0125 мм если у нас 80 шагов на мм). Посмотрим насколько это так.
1125 градуса или 0.0125 мм если у нас 80 шагов на мм). Посмотрим насколько это так.
То что мы видим при скорости 10мм/с (да довольно медленно)
На картинках нарисовано чтение с датчика и счётчик шагов (данные датчика это синяя линия) а так же идеальные значения углов для данного номера шага (хе хе, довольно просто посчитать) а так же вертикальными черточками различия реально измеренного от идеального. Какие выводы можно сделать по этой картинке:
- Шаги у нас не равномерны (что в целом понятно, исходя из физики двигателя)
- Какие то шаги у нас почти точно попадают в идеальные значения углов поворота (но не все…, совсем не все…)
- Хотя точность позиционирования у нас не очень высокая, но повторяемость хорошая (синяя линия на картинке это статистика по 25 повторам
Теперь посмотрим что будет если шаговик пойдёт немного быстрее 25 мм/с
Картинка в целом не поменялась, но ошибка позиционирования возросла (разница между реальным и идеальным положением)
Теперь 50 мм/с
Видно что позиционирование стало ещё хуже. ..
..
Теперь 75 мм/с
Всё поплыло ещё дальше…
100 мм/с
Ошибка осталась на прежнем уровне (tmc2130 перешел в другой режим работы)
125мм/с
150 мм/с
200 мм/с
и 250мм/с
Как видим, с увеличением скорости ошибка позиционирования растёт… Что можно нарисовать примерно так…
Картинка похожа на первую. Опять же зеленая линия это среднее. Оражневая медиана. Какие выводы можно сделать?
- Что приятно средняя ошибка позиционирования примерно 0. Что означает что шаговик с одинаковой вероятность как проскакивает положение, так и недоходит до него (по этому среднее и есть 0).
- А вот медиана уже становится большой. На уровне 0.5-0.8 градуса.
- Разброс ошибок довольно большой, он растёт с примерно 0. 2 градусов при 10мм/с до 4 градусов при 250мм/с, что соответсвует разбросу хода от 0.02 до 0.5 мм (хе хе.. кто там хвастался что печатает на скорости 200+мм/с….?)
- Ещё замечу, что всё это измерялось на свободном шаговике без нагрузки. С нагрузкой будет все печальнее (и я это проверю в следующей части)
 2 градусов при 10мм/с до 4 градусов при 250мм/с, что соответсвует разбросу хода от 0.02 до 0.5 мм (хе хе.. кто там хвастался что печатает на скорости 200+мм/с….?)
2 градусов при 10мм/с до 4 градусов при 250мм/с, что соответсвует разбросу хода от 0.02 до 0.5 мм (хе хе.. кто там хвастался что печатает на скорости 200+мм/с….?)Что из всего этого следует?
Если хочется повышать качество печати, то надо слегка поменять подход к позиционирования шаговика в прошивках (позицоинирование у него не линейное, и это надо учитывать). По идее надо сделать умный closed-loop шаговик, которые будет в состоянии корректировать нелинейности при перемещении.
Продолжение следует…
Подпишитесь на автора
Подписаться
Не хочу
42
Еще больше интересных статей
39
Подпишитесь на автора
Подписаться
Не хочу
Всем привет, я новичок в 3д печати, жду свой первый принтер (flying bear ghost 6), а пока жду руки ч. ..
..
Читать дальше
3
Подпишитесь на автора
Подписаться
Не хочу
Спойлер — М25 нас спасает
Преамбула
Владельцы потребительских прин…
Читать дальше
243
Подпишитесь на автора
Подписаться
Не хочу
Добрый день.
Решил я тут попробовать перейти с 8 бит на 32.
Готовы…
Читать дальше
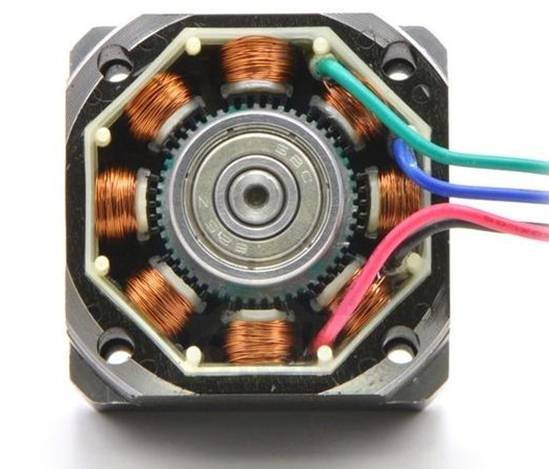
Валкодер из шагового двигателя
Уважаемые посетители, Вы просматриваете страницу на которой собраны. Множество полезных статей. Сделай сам сборник полезных статей Главная Регистрация Правила. О сайте.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Шд + энкодер, как?
- roboforum.ru
- www.cncmasterkit.ru
- Управление шаговым двигателем с помощью валкодера
- Валкодер из шагового двигателя (encoder). Шаговый Двигатель. stepper motors
- Использование шагового двигателя в роли энкодера
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: USB-энкодер из шагового двигателя
Шд + энкодер, как?
Что нового? Если это ваш первый визит, рекомендуем почитать справку по сайту. Для того, чтобы начать писать сообщения, Вам необходимо зарегистрироваться. Для просмотра сообщений регистрация не требуется. Забыли пароль? Показано с 1 по 4 из 4. Тема: Еще раз о энкодере из шагового двигателя. Опции темы Версия для печати Отправить по электронной почте… Подписаться на эту тему…. Finder Просмотр профиля Сообщения форума Созданные темы. Еще раз о энкодере из шагового двигателя.
Для того, чтобы начать писать сообщения, Вам необходимо зарегистрироваться. Для просмотра сообщений регистрация не требуется. Забыли пароль? Показано с 1 по 4 из 4. Тема: Еще раз о энкодере из шагового двигателя. Опции темы Версия для печати Отправить по электронной почте… Подписаться на эту тему…. Finder Просмотр профиля Сообщения форума Созданные темы. Еще раз о энкодере из шагового двигателя.
Доброе время суток всем! Хочу возобновить обсуждение схем управления регулятором. Я прочитал на форуме всё, что относится к данному вопросу и не нашел одной вещи. Самому пока придумать не получилось — подзабыл цифровую технику. К делу. Мне необходимо получить схему, которая анализирует этот сдвиг фазы и выдает на выходе 0 или 1 в зависимости от направления вращения.
Увы, сам оказался слаб. Последний раз редактировалось Konkere; Konkere Просмотр профиля Сообщения форума Домашняя страница Созданные темы. Re: Еще раз о энкодере из шагового двигателя Спасибо. Off топик: И как это я не допер!
Последний раз редактировалось Finder; Waters Просмотр профиля Сообщения форума Созданные темы. FAQ, технологии, электронные компоненты и измерения Кабинет А. Социальные закладки Социальные закладки Digg del. Смайлы Вкл. HTML код Выкл. Текущее время: All rights reserved.
FAQ, технологии, электронные компоненты и измерения Кабинет А. Социальные закладки Социальные закладки Digg del. Смайлы Вкл. HTML код Выкл. Текущее время: All rights reserved.
roboforum.ru
Тема в разделе » Схемотехника, компоненты, модули «, создана пользователем d00m , 4 мар Войти или зарегистрироваться. Искать только в заголовках Сообщения пользователя: Имена участников разделяйте запятой. Новее чем: Искать только в этой теме Искать только в этом разделе Отображать результаты в виде тем. Быстрый поиск. С какой точностью нужно знать угол поворота? Каковы габариты устройства?
Поставил задачу управление шаговым двигателем комбинированными импульсами с помощью энкодера. Двигатель 28byj; драйвер.
www.cncmasterkit.ru
Тема раздела Общие вопросы в категории Станки ЧПУ, Hobby CNC, инструмент ; Может я не так вопрос поставлю, потому как тема шаговых двигателей и вообще электорники не совсем моя, но ведь не Правила форума. Правила Расширенный поиск. Показано с 1 по 26 из Опции темы Версия для печати Отправить по электронной почте… Подписаться на эту тему…. Может я не так вопрос поставлю, потому как тема шаговых двигателей и вообще электорники не совсем моя, но ведь не стыдно не знать, стыдно не хотеть знать Скажите как работает энкодер с ШД, через программу? Или энкодер сам как то тормозит сигналы пока ШД не совершит все шаги чтобы повернуться на нужный градус? Сообщение от Zander1. Сообщение от Soling.
Может я не так вопрос поставлю, потому как тема шаговых двигателей и вообще электорники не совсем моя, но ведь не стыдно не знать, стыдно не хотеть знать Скажите как работает энкодер с ШД, через программу? Или энкодер сам как то тормозит сигналы пока ШД не совершит все шаги чтобы повернуться на нужный градус? Сообщение от Zander1. Сообщение от Soling.
Управление шаговым двигателем с помощью валкодера
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку. Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими. Также у нас есть DIY сообщество , где приветствуются обзоры вещей, сделанных своими руками. Прикосновение к символу эпохи. Внедряю в павербанк.
Имя Запомнить? Пароль Справка Календарь Все разделы прочитаны.
Валкодер из шагового двигателя (encoder). Шаговый Двигатель. stepper motors
Японская компания Oriental Motor расширяет свою линейку шаговых двигателей серии AZ с абсолютным энкодером. Теперь эти двигатели могут быть оснащены угловыми редукторами WPLE с передаточными числами от 5 до 40 и максимальным выходным моментом до Нм. Компания Oriental motor выпустила новую серию шаговых двигателей PKP. Эта серия включает в себя стандартые и высокоточные шаговые двигатели, которые могут быть оснащены энкодером, электромагнитным тормозом и редуктором. Энкодер из шагового двигателя на Ардуино. Очень простая и реально рабочая схема всего из 8 деталей, шаговог
Теперь эти двигатели могут быть оснащены угловыми редукторами WPLE с передаточными числами от 5 до 40 и максимальным выходным моментом до Нм. Компания Oriental motor выпустила новую серию шаговых двигателей PKP. Эта серия включает в себя стандартые и высокоточные шаговые двигатели, которые могут быть оснащены энкодером, электромагнитным тормозом и редуктором. Энкодер из шагового двигателя на Ардуино. Очень простая и реально рабочая схема всего из 8 деталей, шаговог
Использование шагового двигателя в роли энкодера
В электромеханике одним из интересных моментов является то, что обычный двигатель постоянного тока может играть роль также генератора. Вы можете использовать электричество для вращения вала или использовать вращающийся вал для выработки электроэнергии. На основе этого принципа можно сделать немало полезных вещей. И в данном материале мы покажем, как использовать шаговый двигатель в качестве датчика. Применение шагового мотора в качестве датчика имеет смысл.
Шаговый двигатель с энкодером. Нужен ли шаговому двигателю энкодер? Преимущества и особенности шаговых сервоприводов.
Нужен ли шаговому двигателю энкодер? Преимущества и особенности шаговых сервоприводов.
Вернуться в Новичкам или основы основ роботостроения. Сейчас этот форум просматривают: Google [Bot] и гости: 2. Задавайте ваши вопросы, какими бы простыми они не казались, постоянные посетители форума постараются ответить на них по мере своих сил.
Шаговые двигатели, отличающиеся такими преимуществами, как простота конструкции, высокая точность, хороший КПД, надёжность и долговечность, пользуются очень высоким спросом на современном рынке. Удовлетворяющие потребности очень широкого круга пользователей, используются они практически повсеместно, в сферах, простирающихся от моделизма до крупных систем промышленной автоматизации. При этом абсолютно понятно, что, в зависимости от целей использования шагового электродвигателя и нагрузок, которые будут приходиться на данный агрегат, шаговый двигатель может быть использован как отдельно, так и в комплекте с дополнительным оборудованием — например, с контроллером.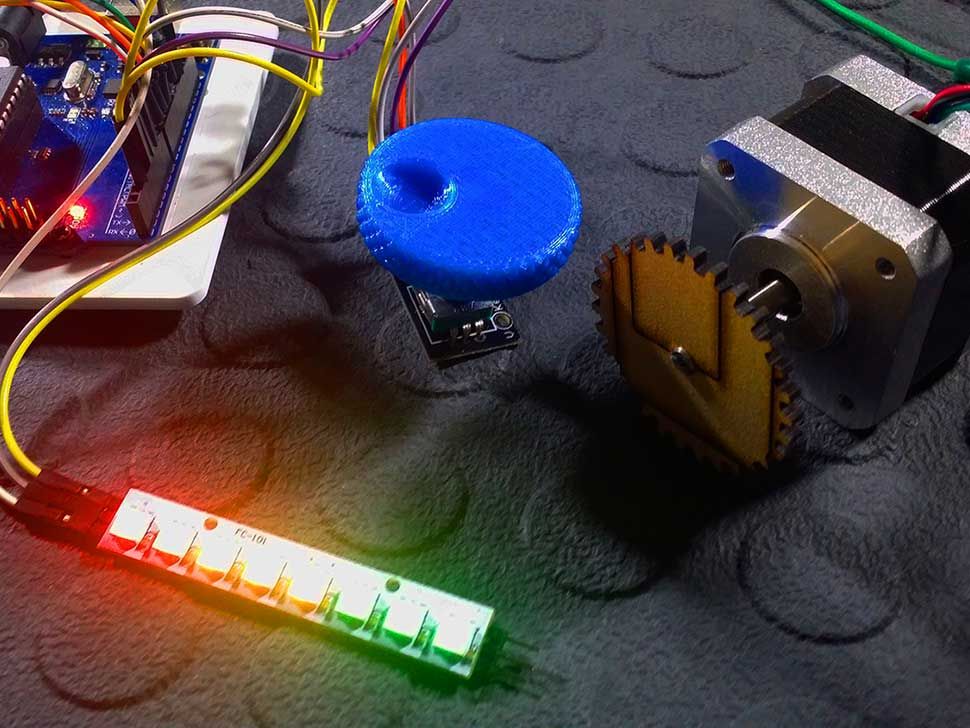 Насколько актуально применение энкодеров совместно с шаговыми электродвигателями, попробуем разобраться в данном материале. Однако на практике дело обстоит несколько иначе. Существует ряд причин, по которым серводвигатель на основе шагового двигателя шаговый двигатель с контроллером может пропускать шаги.
Насколько актуально применение энкодеров совместно с шаговыми электродвигателями, попробуем разобраться в данном материале. Однако на практике дело обстоит несколько иначе. Существует ряд причин, по которым серводвигатель на основе шагового двигателя шаговый двигатель с контроллером может пропускать шаги.
Что нового? Если это ваш первый визит, рекомендуем почитать справку по сайту.
Самодельный валкодер из шагового двигателя синтезатора частоты КВ трансивера. Шаговый двигатель. Скачать схемы по ссылке:. Ссылка на страницу с видео:. Шаговый Двигатель.
Технология «Теплый дом» позволяет возводить объекты нового качества за счет использования несъемной опалубки из промышленного пенополистирола пенопласта. Компания «Термодом» — первый в Крыму и Севастополе производитель термоблоков и листового пенопласта, использующихся в строительстве по технологии «Теплый дом». В любое время года — ровная температура поверхности стен снижает движение воздуха внутри помещения. Высокая теплоизоляционная способность термоблоков создает тепло в зимнее время и освежающую прохладу летом.
Валкодер из шагового двигателя схема
alexxy Загрузка
04.05.2019
15633
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
42
Давно я тут не писал постов про принтеры и электронику, но тут назрела тема использования абсолютного энкодера и попытке сделать вменяемое упралвение шаговым двигателем с рассчётом на точность позиционирования (не путать с повторяемостью).
В качестве подопытного было приобретено несколько разных магнитных энкодеров наподобие тех, что используются в таких проектах как mechaduino (или его китайская инкарнация как MSK Servo42) или же в системах стабилизации камер (внезапно там используются те же магнитные энкодеры). В итоге у меня оказалось два их от разных производителей:
- AS5048A с разрешением 12bit (если пересчитать в угол по нехитрой формуле 360/2**12 ~ 0. 08789 градуса)
- TLE5012b с разрешением 15bit (опять же если пересчитать в угол то 360/2**15 ~ 0.01099 градуса)
 08789 градуса)
08789 градуса)В итоге я остановился на втором варианте, так как его разрешения хватает что бы легко ловить повороты даже для двигателя в 400 шагов на оборот при 32 микрошаге (а это получится примерно так 360/(400*32) ~ 0.028125 градуса), хотя это уже и экстремальный вариант.
На макетке была собрана конструкция из stm32f103c8t6 aka bluepill энкодера и драйвера шагового двигателя tmc2130 (взял то что было под руками). Всё это счастье было запрограммировано на довольно простые действия:
- stm32 имеет прерывания на трех пинах которые подключены к Step/Dir/Enable на плате управления принтером
- при получении сигналов на Step/Dir/Enable производится stm32 делает шаг через tmc2130
- после завершения шага (если успевает) считывает положение двигателя через энкодер tle5012b (на валу двигателя помещён магнит)
- stm32 печатает в UART инфу о количестве шагов, микрошаге, количесве оборотов и текущем угле поворота двигателя (энкодер таки абсолютный и умеет считать обороты)
Дальше у меня возникла идея проверить насколько точно шаговик встаёт по шагам. Для этого в управляющей плате принтера (которая тоже stm32 но пожирнее) были выставлены виртуальные 80 steps/mm для оси X (в принципе это значение стандартное для 20 зубой шпули для GT2) а драйвер двигателя был выставлен в 16 микрошаг (двигатель у меня 1.8 градуса, 200 шагов на оборот, и как следствия с 16 микрошагом каждый шаг соответсвует 360/(200*16) = 0.1125 градуса, запомним эту цифру). Я решил посмотреть как у нас зависит точность выставления угла поворота от скорости принтера (а как следствие и точность).
Для этого в управляющей плате принтера (которая тоже stm32 но пожирнее) были выставлены виртуальные 80 steps/mm для оси X (в принципе это значение стандартное для 20 зубой шпули для GT2) а драйвер двигателя был выставлен в 16 микрошаг (двигатель у меня 1.8 градуса, 200 шагов на оборот, и как следствия с 16 микрошагом каждый шаг соответсвует 360/(200*16) = 0.1125 градуса, запомним эту цифру). Я решил посмотреть как у нас зависит точность выставления угла поворота от скорости принтера (а как следствие и точность).
Как происходило тестирование:
- Был выбран набор скоростей: 10, 25, 50, 75, 100, 125, 150, 200, 250 мм/с
- Для каждой скорости передвижение с X0 до X160 и обратно и ожидание в крайних положения по 2 секунды (это 4 оборота движка в одну строну и в другую) повторялось по 25 раз
- Данные с энкодера писались в лог (скриптик с сериал консоли всё писал в файлики)
В итоге получилось довольно занятная картинка: На картинке выше нарисована статистика собранная по каждой скорости в виде так называемого boxplot (прямоугольник это все значения которые были в измерениях и лежат в пределах одного стандартного отклонения, зеленая линия это среднее значение, оражевая линия это медиана). На картинке нарисовано отклонение от значения медианы для каждой измеренной точки для каждой скорости. Как её интерпретировать:
На картинке нарисовано отклонение от значения медианы для каждой измеренной точки для каждой скорости. Как её интерпретировать:
- На низких скоростях (до 50 мм/с), у нас повторяемость очень неплохая, на уровне погрешности измерения энкодера
- На скорости 75мм/с (а это у нас ~1.875 оборота в секунду) ошибка повторяемости позиционирования шаговика становится сравнимой с одним микрошагом
- На скоростях 100, 125, 150 и 200 мм/с у нас ошибка повторяемости позиционирования шаговика снова становится сравнимой с погрешностью датчика угла поворота (особенность драйвера tmc2130, для него это другой режим работы и он пытается делать точное позиционирование)
- А вот на скорости в 250мм/с система идёт в разнос и повторяемость падает до ~0.7 градусов (что примерно 7 шагов при дроблении 1/16, или если пересчитать в мм то это будет ~0.1 мм в среднем)
Но это если речь идёт о повторяемости а не о точности. А это разные понятия. Так что теперь поговрим про точность. Будем считать, как это далают прошивки большниства принтеров, что перемещение на один микрошаг у нас всегда одианково (в данном случае это 0.1125 градуса или 0.0125 мм если у нас 80 шагов на мм). Посмотрим насколько это так.
Будем считать, как это далают прошивки большниства принтеров, что перемещение на один микрошаг у нас всегда одианково (в данном случае это 0.1125 градуса или 0.0125 мм если у нас 80 шагов на мм). Посмотрим насколько это так.
То что мы видим при скорости 10мм/с (да довольно медленно)
На картинках нарисовано чтение с датчика и счётчик шагов (данные датчика это синяя линия) а так же идеальные значения углов для данного номера шага (хе хе, довольно просто посчитать) а так же вертикальными черточками различия реально измеренного от идеального. Какие выводы можно сделать по этой картинке:
- Шаги у нас не равномерны (что в целом понятно, исходя из физики двигателя)
- Какие то шаги у нас почти точно попадают в идеальные значения углов поворота (но не все…, совсем не все…)
- Хотя точность позиционирования у нас не очень высокая, но повторяемость хорошая (синяя линия на картинке это статистика по 25 повторам
Теперь посмотрим что будет если шаговик пойдёт немного быстрее 25 мм/с
Картинка в целом не поменялась, но ошибка позиционирования возросла (разница между реальным и идеальным положением)
Теперь 50 мм/с
Видно что позиционирование стало ещё хуже…
Теперь 75 мм/с
Всё поплыло ещё дальше…
100 мм/с
Ошибка осталась на прежнем уровне (tmc2130 перешел в другой режим работы)
125мм/с
150 мм/с200 мм/с и 250мм/с Как видим, с увеличением скорости ошибка позиционирования растёт… Что можно нарисовать примерно так… Картинка похожа на первую. Опять же зеленая линия это среднее. Оражневая медиана. Какие выводы можно сделать?
Опять же зеленая линия это среднее. Оражневая медиана. Какие выводы можно сделать?
- Что приятно средняя ошибка позиционирования примерно 0. Что означает что шаговик с одинаковой вероятность как проскакивает положение, так и недоходит до него (по этому среднее и есть 0).
- А вот медиана уже становится большой. На уровне 0.5-0.8 градуса.
- Разброс ошибок довольно большой, он растёт с примерно 0.2 градусов при 10мм/с до 4 градусов при 250мм/с, что соответсвует разбросу хода от 0.02 до 0.5 мм (хе хе.. кто там хвастался что печатает на скорости 200+мм/с….?)
- Ещё замечу, что всё это измерялось на свободном шаговике без нагрузки. С нагрузкой будет все печальнее (и я это проверю в следующей части)
Что из всего этого следует?
Если хочется повышать качество печати, то надо слегка поменять подход к позиционирования шаговика в прошивках (позицоинирование у него не линейное, и это надо учитывать). По идее надо сделать умный closed-loop шаговик, которые будет в состоянии корректировать нелинейности при перемещении.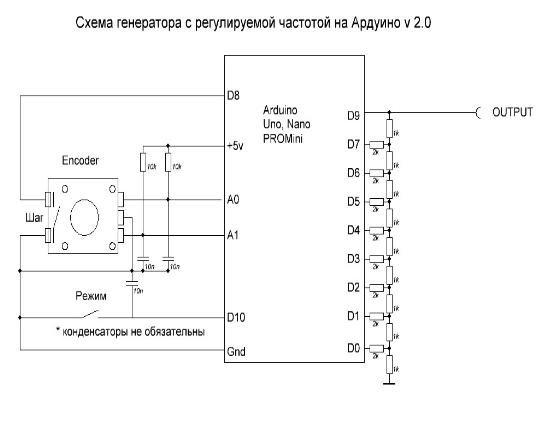
Продолжение следует…
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Подписаться
42
Валкодер шаговый двигатель схема
В электромеханике одним из интересных моментов является то, что обычный двигатель постоянного тока может играть роль также генератора.
Вы можете использовать электричество для вращения вала или использовать вращающийся вал для выработки электроэнергии. На основе этого принципа можно сделать немало полезных вещей.
И в данном материале мы покажем, как использовать шаговый двигатель в качестве датчика.
Применение шагового мотора в качестве датчика имеет смысл. Если катушки в двигателе могут перемещать вал, то перемещение вала должно вызвать ток в катушках. Однако следует заметить, что при низких скоростях вы можете пропустить импульсы. Опять же, устройство не оптимизировано для этого типа операций.
В схеме используется дифференциальный усилитель на основе двух ОУ для считывания импульсов от катушки. Два операционных усилителя с двух катушек создают квадратурный сигнал, как обычный энкодер.
Когда вал поворачивается в одном направлении, один импульс будет следовать за другим. При вращении в другом направлении последовательность импульсов будет реверсирована.
Для проверки работоспособности концепции можно собрать схему из Arduino, двух двигателей и драйвера A4988.
- А можно с одним двигателем и светодиодным кольцом AdaFruit NeoPixel в качестве индикатора, как на видео ниже.
- В любом случае считывать импульсы с датчика/двигателя поможет следующий код:
- Предлагается использовать в качестве валкодера шаговый двигатель от старых 5-ти дюймовых дисководов.
Двигатель имеет две обмотки. При вращении вала на выводах этих обмоток будут появляться импульсы ,сдвинутые по фазе, которые можно усилить до уровня логической «1». Для этого предлагается схема , разработанная VK6BRO .
Для этого предлагается схема , разработанная VK6BRO .
С подобным двигателем получается около 200 импульсов на оборот . Ненужную алюминиевую втулку с оси двигателя проще всего снять, предварительно слегка разогрев ее.
| Вид печатной платы валкодера | Общий вид валкодера |
| Печатная плата размером 35х35 мм приклеивается к задней части двигателя. |
- Рисунок печатной платы в формате Sprint-Layout
- Добавления от EW2CE
- Валкодер из шаговика сначала не пошел, но после доработки схемы и подключении двух лишних проводов в противофазе все пошло отлично.
| У двигателя 6 проводов: | |
| Белый | 1 |
| Голубой | 2 |
| Красный | 3 |
| Желтый | 4 |
И остаются 2 провода, черный и коричневый или в некоторых движках 2-черных.Их нужно подключить к 1 и 4 выводам в противофазе, тоесть так что бы движок начал вращаться с большем усилием.
На выходе схемы я поставил последовательно по резистору 4,7ком. Обязательно нужно поставить резисторы по 1 МОм в цепях обратной связи микросхемы LM358. После этих переделок все пошло отлично, даже на малых скоростях. Вобщем при любых манипуляциях валкодер сбоев не дает и не пропускает импульсы. Я думаю что все описал. У нас уже многие повторили с этими переделками, и во всех все получилось.
Рисунок печатной платы в формате Sprint-Layout
Вечный энкодер (валкодер) с устойчивыми положениями из шагового двигателя
Механический энкодер — вещь удобная в использовании, но он имеет некоторые досадные недостатки. В частности, контакты со временем изнашиваются и приходят в негодность, появляется дребезг. Оптические энкодеры гораздо надежнее, но они дороже, многие из них боятся пыли, и они редко встречаются в таком виде, в котором их удобно было бы использовать в радиотехнике.
Короче, когда я узнал о том, что шаговый двигатель можно использовать как энкодер, эта идея мне очень понравилась. Практически вечный энкодер! Замучить его невозможно: соберешь раз и можешь энкодить всю жизнь.
Практически вечный энкодер! Замучить его невозможно: соберешь раз и можешь энкодить всю жизнь.
Содержание / Contents
↑ Шаговый двигатель и схема
Я разобрал несколько дисководов, везде двигатели были разные. Встречались на шлейфе, встречались с косой цветных проводов. На шлейфе общий провод — крайний. Всё остальное находится прозвонкой.
По сопротивлению понятно: с выхода на выход сопротивление вдвое больше, чем с выхода на общую точку. А можно даже не прозванивать.
Если открутить четыре винта, внутри коммутационная плата, на ней видно, где общий провод.
Форма претензии по ремонту автомобиля
Исходная схема многократно встречается в Сети в вариациях. Я оттолкнулся от статьи Thomas (OZ2CPU) .
У неё есть достоинства, но есть и недостатки, об этом далее. Собрал пробный вариант в виде макета, и понял, что ничего не понял Для начала хотелось бы сразу видеть, в какую сторону происходит шаг. Схема выдавала квадратурный код, как и обычный энкодер. Этот код надо было каким-то образом превратить в мигание светодиода — «правый» или «левый».
Этот код надо было каким-то образом превратить в мигание светодиода — «правый» или «левый».
Разработал и протестировал вот такую схему:
Кстати, эту схему на логике можно использовать и для обычного энкодера, я её и отрабатывал на нём.
Для сборки понадобятся 8 элементов «2И-НЕ», я использовал два чипа 74HC00.Элемент U2A, диод, конденсатор и U2B создают короткий импульс в момент положительного фронта. Элемент U6D, U4D и U2D — мультиплексор, который пересылает этот испульс либо на один, либо на другой светодиод.
Разумеется, этот же функционал можно сделать на единственном микроконтроллере, но это далеко не для всех доступно и удобно. Всё-таки элементы 2И-НЕ можно найти где угодно, в т. ч. советские (74хх00, К155ЛА3, К555ЛА3).
Последние два инвертора (U5D и U3D) можно выкинуть, ведь ничто нам не мешает подключить светодиоды не к земле, а к плюсу питания.
Если крепко пошевелить мозгом, схему можно было бы ещё упростить, но эту задачу оставляем на будущее.
Печатки нет, поскольку всё собиралось только на макетке.
↑ Недостатки схемы и их преодоление
↑ Видео в работе
Жалко, что видео не передает тактильные ощущения на валу!
↑ Итого
В целом работа энкодера меня устраивает. Крутить такую «ручку громкости» необычно приятно.Работа над устройством будет продолжена.
Спасибо за внимание!
Камрад, рассмотри датагорские рекомендации
???? Купон до 1000₽ для новичка на Aliexpress
Никогда не затаривался у китайцев? Пришло время начать! Камрад, регистрируйся на Али по нашей ссылке. Ты получишь скидочный купон на первый заказ. Не тяни, условия акции меняются.
???? Полезные и проверенные железяки, можно брать
Куплено и опробовано читателями или в лаборатории редакции.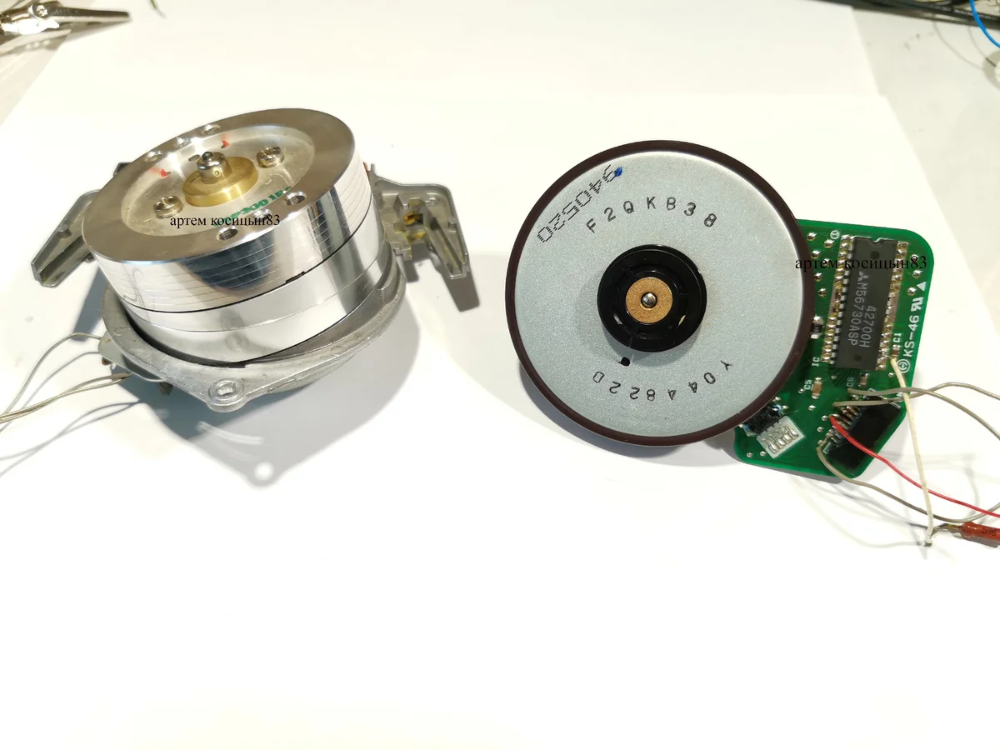
Тема: Валкодер из шагового двигателя
Собрал эту схемку http://ru3ga.qrz.ru/UZLY/encod.htm , работает великолепно, но перестраивает частоту через один импульс. Получилось примерно 100 импульсов вместо 200. Как сделать чтобы было 200.
Вот это дааааа. Читал форумы по этим темам, там столько людей собирало их, а никто не испытывал похоже. У одного меня проблема с ним что ли?
Проблема не с шаговым двигателем и схемой, а с ПРОГРАММОЙ!
А они разве не одинаковые. На входе синтеза формируется 10, 11, 01, 00. Это 4 щелчка двигателя. При этом происходит два шага наверх. Как можно получить два импульса за 1 щелчок.
Возмите упрощенную модель для оптовалкодера с оптюратором с четырьмя прорезями (Мальтийский крест). Это четыре «щелчка». За один оборот вы получите восемь изменеий состояния оптопары, а на двух фотоприемниках — шестнадцать.
Ну так с оптопарой понятно. У неё 2 фотоприёмника и 8 состояний. У шаговика 2 обмотки и . состояний. Я кстати разобрал двигатель и вывел все выводы обмоток отдельно. Получилось 2 пары обмоток совмещенных под 90 град. Можно ли включить 4 обмотки как нибудь. Я написал письмо RD3AY по поводу этой проблемы, но пока ответа нет.
Я кстати разобрал двигатель и вывел все выводы обмоток отдельно. Получилось 2 пары обмоток совмещенных под 90 град. Можно ли включить 4 обмотки как нибудь. Я написал письмо RD3AY по поводу этой проблемы, но пока ответа нет.
С валкодером из шагового двигателя то же, что и с оптовалкодером. Посмотрите на схему, ссылку на которую Вы приводите ранее. И там и там на выходе два сигнала сдвинутые на 90 град. с цифровыми уровнями. Есть, правда, еще один нюанс. В валкодере из шагового двигателя Вы имеете именно ЩЕЛЧКИ — механическую фиксацию угла поворота.
Один щелчек, как мы выяснили, это два перехода. Т.е. сдвинуть валкодер только на один переход НЕ ПОЛУЧИТСЯ! Это можно сделать только используя оптический валкодер. Заодно отпадет надобность в операционниках, значительно снижается вес и габариты. Вот пример реализации валкодера из компьютерной мыши.
Такие валкодеры прменяются в моем DDS синтезаторе.
Да, но некоторые шаговички имеют функцию так называемую режым полушагов.
 и при этом как раз таки имеют место быть промежуточные числа, которые не воспринимаются PIC-ом трансивера. При поключении шаговика с двумя обмотками, но с 50-ю щелчками, всё ровно, переключает при каждом щелчке. это скорее дело в движке.
и при этом как раз таки имеют место быть промежуточные числа, которые не воспринимаются PIC-ом трансивера. При поключении шаговика с двумя обмотками, но с 50-ю щелчками, всё ровно, переключает при каждом щелчке. это скорее дело в движке.Тогда смотри сообщение номер три.
Изначально непонятно о чем идет речь? Что за конструкция? Какой контроллер? Кто писал программу? Есть ли возможность ее изменить? Если валкодер с формирователем исправно работает в статическом режиме (медленное вращение с контролем состояний по обоим каналам) то очевидно, что неувязки в управляемом устройстве.
Тест драйв ниссан кашкай 2012 механика
Тема: Валкодер из шагового двигателя
Идея давно реализована. Лет 40 назад. Лучше взять на 400 Гц бесконтактный. Перестройку можно сделать плавную. Будет плавный синтезатор, как ГПД, но это будет настоящий синтезатор с опорной стабильностью.
Да, давно реализовано. От кварцевого генератора формируется 3 фазное напряжение с низкой частотой (можно при помощи 3-х dds) и подается на техфазную обмотку (чаше статорную).
С однофазной снимается напряжение с фазой, пропорциональной углу поворота ротора. Это напря жение по фазе сравнивается с напряжением одной из фаз и разность времен перехода через 0 заполняется кварцованной частотой.
Можно получить любое значение «импоборот».
- Это в системах с ЧПУ и других, где нужна обратная связь по положению.
- Но их в современных системах вытеснили оптические и магнитные енкодеры.
Стал вопрос повторить валкодер из шаговика потому как фирменный не купить, мышек с оптикой не найти они кончились. Шаговик был удачно куплен на барахолке. С него наружу торчит 5 выводов. Красный желтый белый синий и зеленый. Подозреваю что 4 обмотки соеденены звездой и имеют общий центральный вывод. давайте его определим. Насамом деле это не сложно.
1 Промеряем Оммическое сопротивление всех возможных сочетаний пар проводов. Для этого берем наугад первый и промеряем его со всеми остальными ( мы получим 4 пары). Затем второй и уже с первым не промеряем а только с оставшимися тремя( получаем 3 пары) Потом следующий и так до конца.
- Мои результаты красный — желтый 164 Ом красный — зеленый 140 Ом красный — белый 264 Ом
- красный синий 264 Ом.
- желтый — зеленый 140 Ом желтый — белый 262 Ом
- желтый — синий 262 Ом
- зеленый — белый 140 Ом зеленый — синий 140 Ом
- белый — синий 262 Ом.
Итак очевидно что Все пары которые имеют 140 Ом имеют зеленый вывод. это говорит о том что Зеленый это середина креста из 4х обмоток.
Схема формирователя импульсов с оригинальной статьи http://ru3ga.qrz.ru/UZLY/encod.htm Но с добавками-доделками. Резисторы в обратной цепи ОУ и резисторы в выходных цепях.
Полчаса упражнений с паяльником на макетке и о чудо синтезатор реагирует на поворот вала шаговика будь то резкое вращение будь то попытка провернуть вал настолько нежно чтобы схема не отреагировала. Но это невозможно.
Работает на все 100 %. Колво импульсов на оборот 100 штук. Это конструктивная особенность шаговика и с этим прийдется мириться.ю Незнаю плохо это или хорошо.
 у меня нет пока опыта работы с синтезатором.
у меня нет пока опыта работы с синтезатором.Построю свой MiniYes раскажу.
РадиоКот :: Энкодер из шагового двигателя
Добавить ссылку на обсуждение статьи на форумеРадиоКот >Статьи >
| Теги статьи: | ЭнкодерИз желудей и спичекШаговый двигательДобавить тег |
Энкодер из шагового двигателя.
Использование шаговых двигателей (ШД) в качестве энкодера по-прежнему остается привлекательным решением, т.к. промышленные энкодеры, при всех своих достоинствах, имеют существенные недостатки — цена и сложности при покупке единичных экземпляров.
Если контактные энкодеры еще с трудом можно приобрести, то цена бесконтактных энкодеров совершенно неподъемная. В моем случае исключалось применение контактного энкодера, т.к. не допускались пропуски и генерация паразитного (из-за дребезга) сигнала при вращении.
Мне не удалось получить удовлетворительных результатов при испытаниях контактных инкрементального и абсолютного энкодеров.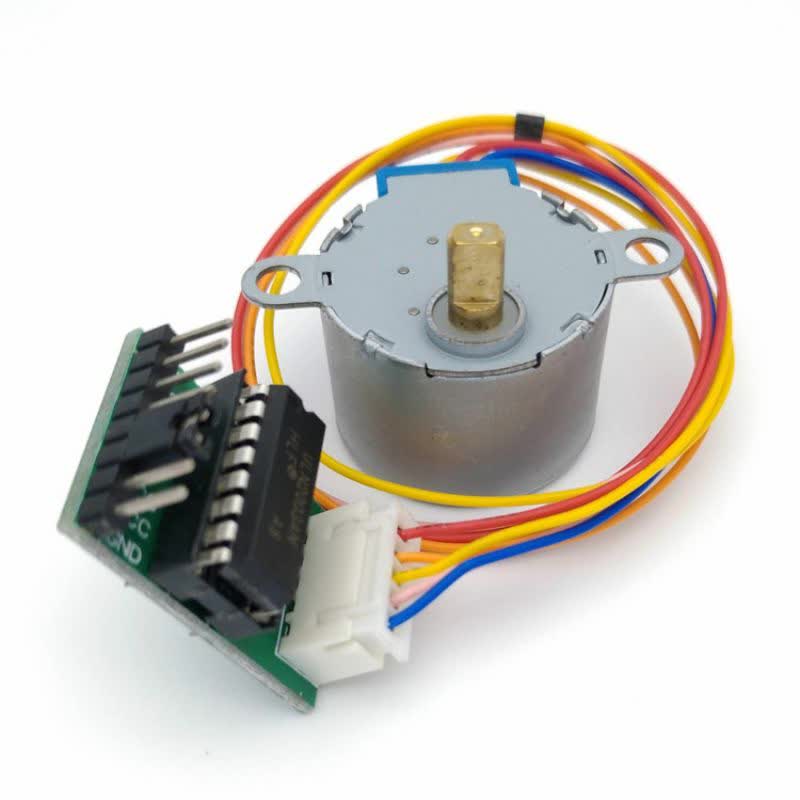 Марки называть не буду.
Марки называть не буду.
В итоге, склонился к применению ШД от старого 5-дюймового дисковода. За основу взял https://ru3ga.qrz.ru/UZLY/encod.htm, но большое число элементов совсем не радовало.
В результате, схема была приведена к виду, показанному на Рис.1.
Для подавления паразитных колебаний у обоих каналов закорочена одна из полуобмоток, что обеспечило достаточное демпфирование, резко снизило скорость нарастания сигнала при больших скоростях вращения и позволило использовать ШД с внутренним соединением средних выводов обмоток. Также введен гистерезис порядка 50…100 мВ (зависит от напряжения питания 4…5В).
После изменений работа схемы при напряжении питания 5В меня устроила, но хотелось, чтобы она работала от 3В. Большое число элементов и сравнительно большой потребляемый ток, привели к схеме Рис. 2.
2.
Подключение обмоток двигателя осталось таким же, а в качестве формирователя сигнала использована микросхема HEF4069 (можно заменить CD4069, MC14069). Ввод схемы в линейную область сделан на одном инверторе, выход которого соединен с входом.
Такое соединение позволяет превратить инвертор в повторитель напряжения, примерно равного половине напряжения питания без использования дополнительного резистивного делителя. При 3В схема на LM358 отказалась работать из-за недостаточно хороших выходных уровней компаратора. Качество работы обеих схем при 5В питании получилось примерно одинаковое.
При монотонном пошаговом повороте вала двигателя наблюдалась четкая последовательность 2-битного кода Грея. Но! При смене направления вращения первый шаг нарушал эту последовательность.
Например:
| Вращение по часовой | Вращение против часовой |
| 00 | 11 |
| 01 | 10 |
| 11 | 00 |
| 10 | 01 |
Видно, что при смене направления происходило изменение состояния обоих каналов, что противоречило правилу кодирования. Последующие шаги соответствовали правильной последовательности нового направления. Эта особенность поведения ШД (смена состояния в обоих каналах) учитывалась программно. Для примера приведены ассемблерные программы обработки сигналов ШД в качестве энкодера для AVR и MSP430.
Последующие шаги соответствовали правильной последовательности нового направления. Эта особенность поведения ШД (смена состояния в обоих каналах) учитывалась программно. Для примера приведены ассемблерные программы обработки сигналов ШД в качестве энкодера для AVR и MSP430.
На Рис.3 приведены диаграммы сигналов, генерируемых ШД при включении обмоток в соответствии со схемами. Алгоритм обработки сигналов энкодера показан на двух нижних диаграммах Рис.3 -при поступлении прерывания от активного фронта канала А анализируется уровень и флаг требования прерывания канала B.
Если флаг установлен, что говорит о смене направления вращения, дополнительно анализируется состояние внутреннего рабочего флага, который сигнализирует о предыдущем направлении вращения и идет соответствующее изменение значения счетчика шагов.
Это сделано для исключения неоднозначности определения кодовой последовательности, возникающей при смене направления вращения. Если флаг сброшен, что говорит об отсутствии смены направления вращения, идет простое изменение значения счетчика шагов.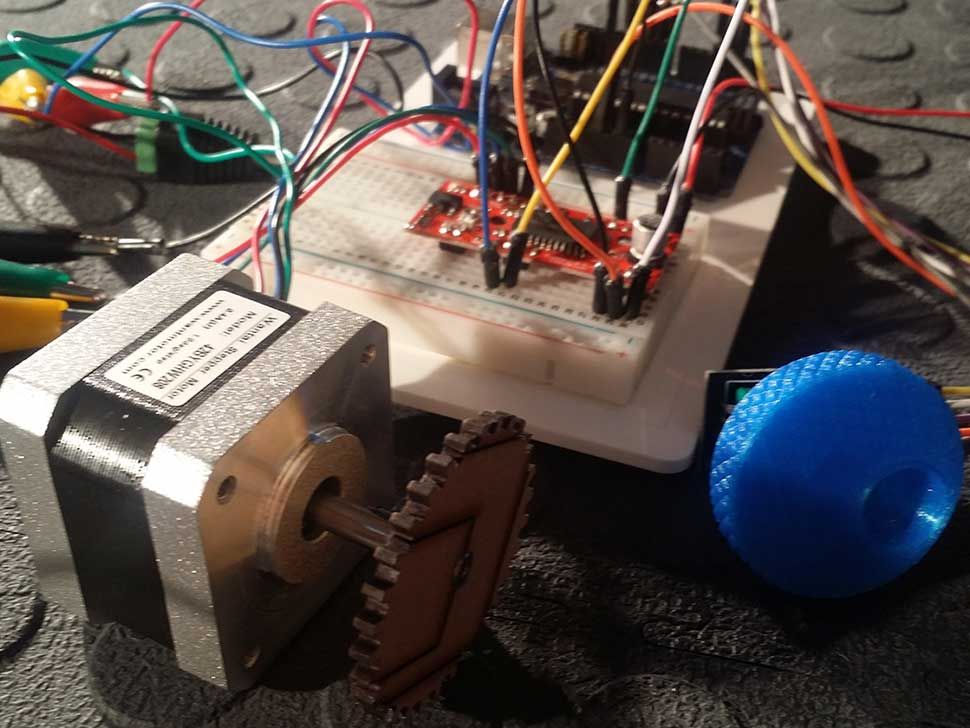
-совершенно аналогично идет обработка прерывания от активного фронта канала В. В итоге получается обработка каждого шага двигателя.
- Шаговый двигатель, в качестве энкодера, был встроен в конструкцию ленточной пилорамы для повышения точности изготовления пиломатериалов.
- Файлы: Прошивки для AVR и MSP430.
- Вопросы, как обычно, складываем тут.
| Как вам эта статья? | Заработало ли это устройство у вас? |
Эти статьи вам тоже могут пригодиться:
ЭНКОДЕР +PIC16F628ADRO unit. Цифровая индикация положения на линейных энкодерахОчерки копателя кристаллов
Валкодер из двигателя
Page 2
Гетеродины и задающие генераторы современных приемников и радиолюбительских трансиверов сегодня все чаще делают на основе синтезаторов частоты с микроконтроллерным управлением.
Однако настраивать такой приемник на станцию, набирая значение частоты на клавиатуре очень неудобно, а для плавкой перестройки (точнее, дискретной с очень мелким шагом, имитирующей обычную аналоговую) необходим точный преобразователь угла поворота ручки настройки в цифровой код — так называемый валкодер.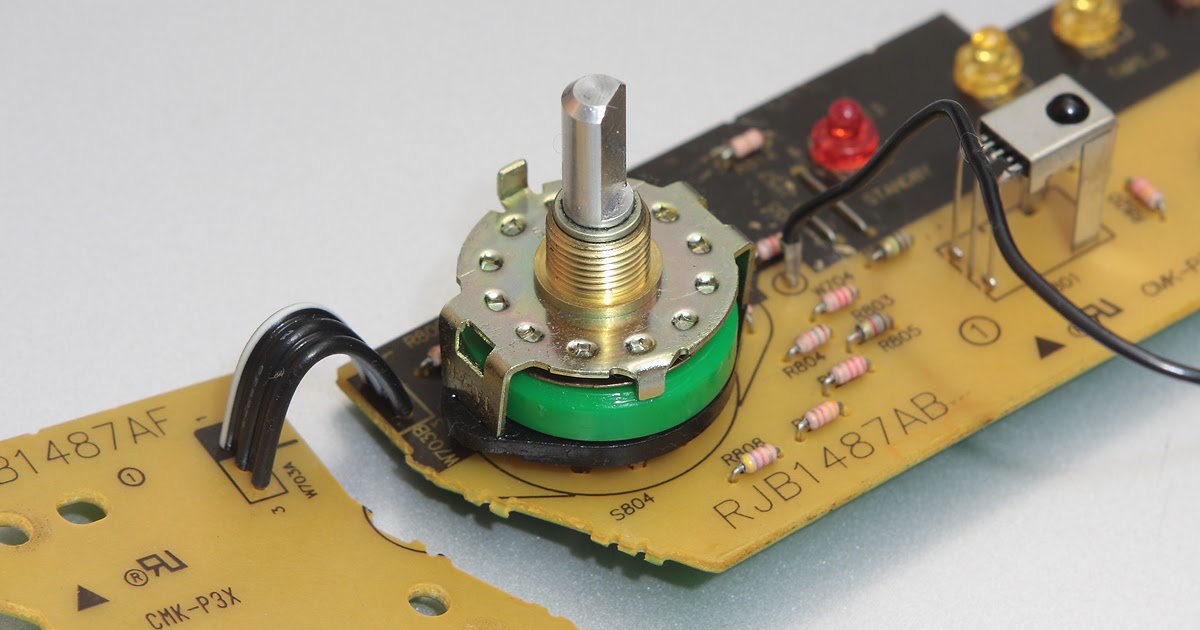 Стоимость этого прецизионного устройства нередко превосходит цену всех остальных деталей синтезатора вместе взятых. Тем не менее радиолюбителю из Германии (Steffen Braun, DJ5AM) удалось из деталей неисправной компьютерной «мыши» изготовить простой и дешевый, но вполне подходящий для любительского применения валкодер[1].
Стоимость этого прецизионного устройства нередко превосходит цену всех остальных деталей синтезатора вместе взятых. Тем не менее радиолюбителю из Германии (Steffen Braun, DJ5AM) удалось из деталей неисправной компьютерной «мыши» изготовить простой и дешевый, но вполне подходящий для любительского применения валкодер[1].
Вращательное движение шара компьютерной мыши внутри нее воспринимают два оптоэлектронных датчика угла поворота. Генерируемые ими импульсы поступают в компьютер, обрабатываются им и управляют перемещением курсора относительно осей X и Y экрана монитора.
Основной принцип — преобразование угла поворота в число импульсов вполне подходит для валкодера, к тому же каждый из датчиков «мыши» снабжен двумя соответствующим образом расположенными чувствительными элементами, что позволяет определить не только угол, но и направление поворота.
Подробнее прочитать об устройстве и работе этих датчиков можно в [2] (в оригинале — ссылка на статью в малодоступном отечественному читателю немецком журнале Мы заменили ее статьей из нашего журнала. — Ред.).
— Ред.).
Приступая к работе, необходимо вскрыть корпус «мыши» и убедиться, что пластмассовый подшипник, в котором вращается вал датчика, находится между контактирующей с обрезиненным шаром утолщенной частью вала и диском с прорезями.
У многих «мышей» это не так — вал укреплен в двух подшипниках, расположенных по его концам. Такая конструкция для наших целей непригодна. Утолщенная часть (головка) вала диаметром приблизительно 4 мм должна быть достаточно длинной для установки ручки настройки.
Расстояние от головки до диска должно быть не менее 15 мм.
Для крепления валкодера к передней панели приемника или трансивера потребуется еще одна деталь — алюминиевая втулка с наружной резьбой и гайкой от переменного резистора. В отверстие втулки пропускают вал датчика.
Возможно для выполнения этой операции пластмассовый подшипник, в котором вращается вал.
придется обточить напильником, а алюминиевую втулку — укоротить, чтобы на выступающую из нее головку вала можно было насадить ручку настройки.
Выпаивать оптопары из печатной платы «мыши» не следует, чтобы не повредить их. Отделенную от платы часть с оптопарами крепят эпоксидным клеем или другим способом к втулке-подшипнику таким образом, чтобы оптопары заняли прежнее положение относительно диска. До окончательного затвердевания клея следует убедиться, что диск легко вращается.
Излучающие диоды и фоготранзисторы «мыши» внешне очень схожи. Различить их можно, проследив печатные проводники на плате. Излучатели обычно соединены последовательно. Эту цепь необходимо сохранить и подключить ее через гасящий резистор к источнику питания. Номинал резистора выбирают исходя из тока через диоды не более 5 мА. Чаще всего подходит 1 кОм.
Далее выводы омметра, установленного на предел измерения 100 кОм, подключают к коллектору и эмиттеру одного из фототранзисторов и, медленно вращая диск, убеждаются, что показания прибора резко уменьшаются при каждом освещении фототранзистора излучающим диодом через прорезь в диске.
Если это не так. возможно, выводы коллектора и эмиттера определены неправильно и полярность подключения к ним омметра нужно изменить. На результат может повлиять и слишком яркое внешнее освещение, поэтому работу следует выполнять а тени.
Таким же образом проверяют фото транзистор второй оптопары.
Микросхемы DD1, DD2 и прочие элементы соединяют согласна схеме жесткими проводами и выводами, всю сборку приклеивают к механическим узлам валкодера. Внешний вид этой конструкции показан на рис. 3. Если ваякодер послужит частью более сложного изделия, микросхемы DD1 и DD2 могут быть установлены на его печатной плате.
ЛИТЕРАТУРА
- Braun S. «Aus die Maus»: Inkrementale Drehgeber — einfash realisiert. — Funkamateur, 2002, № 4, S. 362, 363.
- Долгий А. «Мышь»: Что внутри и чем питается. — Радио. 1996. № 9. с. 28—30.
Радио №9 2002г.
Page 3
Page 4
Page 5
Page 6
Управление шаговым двигателем с помощью валкодера
Блоки управления шаговыми двигателями обычно содержат несколько логических микросхем или микроконтроллер. Однако в тех случаях, когда сложный закон управления двигателем не требуется, а достаточно лишь вращать его вал в одну или другую сторону, отсчитывая число шагов «на глаз», от сложной логики можно отказаться.
Однако в тех случаях, когда сложный закон управления двигателем не требуется, а достаточно лишь вращать его вал в одну или другую сторону, отсчитывая число шагов «на глаз», от сложной логики можно отказаться.
Для ручного управления шаговым двигателем, открывающим и закрывающим теплицу, я применил валкодер.
Но не обычный, с двумя группами контактов, замыкающихся и размыкающихся со сдвигом на полшага, а специально изготовленный, имеющий четыре (по числу обмоток двигателя) группы чередующихся контактов, поочерёдно замыкающихся с подвижным контактом при вращении вала, на котором укреплён подвижный контакт. Неподвижные контакты валкодера соединены с обмотками двигателя через электронные ключи, коммутирующие обмотки.
Конструкция самодельного валкодера изображена на рис. 1. На кольцо 4 из изоляционного материала намотана обмотка 3, содержащая 28 витков, четырьмя сложенными вместе лакированными одножильными медными проводами.
1. На кольцо 4 из изоляционного материала намотана обмотка 3, содержащая 28 витков, четырьмя сложенными вместе лакированными одножильными медными проводами.
Размеры кольца 4 и диаметр проводов должны быть подобраны так, чтобы на внутренней поверхности кольца витки плотно, практически без зазоров, легли в один слой, а провода чередовались в порядке 1-2-3-4 без перехлёстов.
Рис. 1. Конструкция самодельного валкодера
К верхнему закруглённому срезу кольца 4 провода должны прилегать, по возможности, плотнее, зазоры между ними заливают эпоксидной смолой. Внутрь кольца 4 туго вставлена вырезанная из листового изоляционного материала центрирующая шайба 7 с отверстием для латунного вала 1. Шайбу 7 тоже крепят эпоксидной смолой. Такое же отверстие, как в центрирующей шайбе 7, сверлят в основании 2.
После затвердевания смолы кольцо 4 с обмоткой кладут верхним торцом на лист уложенной на гладкую поверхность мелкозернистой наждачной бумаги и равномерно сошлифовывают провода-контакты и эпоксидные перемычки между ними приблизительно на четверть диаметра провода. Так создают контактную поверхность, по которой скользит стальной шарик 6 подвижного контакта 5. Парасталь-медьобеспечи-вает надёжный контакт и лёгкое скольжение.
Так создают контактную поверхность, по которой скользит стальной шарик 6 подвижного контакта 5. Парасталь-медьобеспечи-вает надёжный контакт и лёгкое скольжение.
Упругий подвижный контакт 5 с отверстием для шарика 6 припаивают ближе к верхнему концу вала 1. На нижний конец вала 1 надевают две металлические шайбы 8 и пропускают вал через отверстие в центрирующей шайбе 7, затем сквозь кольцо 4 с обмоткой (повёрнутое контактной поверхностью вверх) и, наконец, через отверстие, просверленное в основании 2.
Подбирая оптимальное положение кольца 4 на основании 2, добиваются, чтобы вал 1 легко вращался, а шарик 6 скользил строго по оголённой поверхности контактов, равномерно прижимаясь к ней. В этом положении кольцо 4 фиксируют на основании 2 эпоксидной смолой. Остаётся только устранить осевое перемещение вала 1, прижав его кронштейном 9. Получился валкодер на 112 положений (рис. 2).
Рис. 2. Валкодер
Он будет поочерёдно подключать к источнику питания обмотки униполярного шагового двигателя, который за один оборот вала валкодера станет делать 112 шагов. Направление шагов будет таким же, как у надетой на вал валкодера ручки управления, а их частота будет определяться скоростью её вращения.
Направление шагов будет таким же, как у надетой на вал валкодера ручки управления, а их частота будет определяться скоростью её вращения.
На рис. 3 показана принципиальная схема блока управления униполярным шаговым двигателем M1 с помощью описанного валкодера, обозначенного на ней S1. Поскольку в блоке четыре одинаковых электронных ключа, рассмотрим только один из них, собранный на транзисторах VT1 и VT2.
Рис. 3. Принципиальная схема блока управления униполярным шаговым двигателем M1 с помощью валкодера
Предположим, что в момент подачи питания подвижный контакт валкодера не соединён ни с одним из неподвижных контактов группы A. Поэтому транзистор V71 открыт, а конденсатор C1 разряжен. Транзистор VT2 закрыт, ток через включённую в цепь его стока обмотку двигателя M1 не течёт. Светодиод HL1 погашен.
В момент соединения подвижного контакта с неподвижным контактом группы А транзистор VT1 закрывается. Конденсатор C2 начинает заряжаться через резисторы R3 и R4.
 Вызванное током зарядки падение напряжения на резисторе R4 открывает полевой транзистор УТ2 и удерживает его открытым.
Вызванное током зарядки падение напряжения на резисторе R4 открывает полевой транзистор УТ2 и удерживает его открытым.Через обмотку двигателя течёт ток, а светодиод HL1 включён, сигнализируя об этом. Но когда конденсатор C2 зарядится до такой степени, что напряжение на резисторе R4 упадёт ниже порога открывания транзистора VT2, он закроется.
Это ограничит длительность импульсов тока в обмотке, что необходимо в тех случаях, когда ручку валкодера продолжительное время не вращают или делают это слишком медленно.
https://www.youtube.com/watch?v=DJjU8qEre_Y
Имейте в виду, что отсутствие тока в обмотках двигателя в паузах между шагами экономит электроэнергию и снижает нагрев двигателя и транзисторов в электронных ключах, но ослабляет фиксацию его ротора в статических положениях. Это не имеет большого значения, если надёжная фиксация ротора двигателя в достигнутом положении не требуется или, например, в случаях, когда вращающий момент передают на перемещаемый объект через червячный редуктор.
При размыкании подвижного и неподвижного контактов транзистор W1 открывается. Через него и диод VD1 разряжается конденсатор C2. Если транзистор VT2 был открыт, он закроется и прекратит ток в обмотке двигателя, а светодиод HL1 погаснет.
Диод VD2 предназначен для подавления импульсов напряжения самоиндукции, возникающих на обмотке в моменты прекращения текущего через неё тока. Фильтр R1d необходим для предотвращения самовозбуждения устройства. Оно возможно, поскольку валкодер состоит, по существу, из четырёх катушек индуктивности, связанных между собой как индуктивно, так и через межвитковые ёмкости.
Резисторы R21-R24 ограничивают ток в обмотках двигателя. Их сопротивление придётся подбирать индивидуально для двигателя каждого типа. Возможно, они совсем не потребуются.
Светодиоды HL1-HL4 рекомендуется разместить так, чтобы создаваемый ими «бегущий огонь», перемещаясь, показывал направление вращения ротора шагового двигателя.
При несовпадении этих направлений или пропуске шагов нужно проверить порядок подключения обмоток двигателя к выходам электронных ключей.
Я испытывал это устройство с шаговыми двигателями PM42L-EPAO и 103-550-0149 и получил хорошие результаты.
Схема устройства управления биполярным шаговым двигателем сложнее рассмотренной, так как требуется не только переключать обмотки, но и изменять направление текущего через них тока. Она изображена на рис. 4. Входные цепи A-E могут быть подключены как к одноимённым выходам электронных ключей устройства, собранного по схеме рис.
3, так и непосредственно к таким же группам контактов валкодера. Однако в последнем случае не будет ограничения длительности импульсов тока в обмотках двигателя.
Рис. 4. Схема устройства управления биполярным шаговым двигателем
Общий вывод обмоток двигателя в рассматриваемом случае подключён к искусственной средней точке напряжения питания Uпит, созданной с помощью узла на транзисторах VT5-VT7.
Это уменьшило в два раза подаваемое на обмотки двигателя напряжение, но избавило от необходимости применять дополнительные электронные ключи для коммутации вторых выводов каждой обмотки. , устанавливают подборкой резистора R15. Учтите, что при изменении напряжения питания подборку резистора придётся повторить.
, устанавливают подборкой резистора R15. Учтите, что при изменении напряжения питания подборку резистора придётся повторить.
От узла на транзисторах VT5-VT7 можно отказаться, если применить для питания двигателя двухполярный источник с реальной средней точкой, которую следует соединить с цепью Z.
Устройство было проверено с двигателями 16PU-M002-G1 и M49SP-1. Выяснилось, что при продолжительной работе и токе, потребляемом двигателем, более 0,2 А все мощные транзисторы следует установить на теплоотводы.
В любительских условиях паспортные данные на применяемые шаговые двигатели, как правило, отсутствуют. Нет и данных о назначении их выводов, число которых к тому же бывает разное.
Я обычно выхожу из затруднительного положения следующим образом.
Прежде всего, с помощью омметра нахожу выводы каждой из обмоток. Если их две (с общим выводом или без него) — двигатель биполярный. При отсутствии общего вывода создаю его, соединив вместе по одному (любому) выводу каждой обмотки.
Чтобы безошибочно оценивать на глаз направление шагов вала двигателя, надеваю на него указатель в виде стрелки.
Затем, поочерёдно подключая к общему и к свободному выводу каждой обмотки источник питания в разной полярности, нахожу такую последовательность подключений, при которой вал двигателя без пропусков и сбоев «шагает» в нужном направлении.
Приблизительно такую же процедуру я использую с униполярным двигателем.
Он может иметь четыре обмотки с общим пятым выводом или две пары обмоток с отдельным общим выводом каждая (всего шесть выводов). В последнем случае общие провода пар я объединяю в один. Подключая источник питания плюсом к общему проводу всех обмоток, а минусом — поочерёдно к каждой обмотке, определяю их последовательность для шагов в нужном направлении.
Самый сложный случай — двигатель с четырьмя обмотками, имеющими восемь отдельных выводов. Эти обмотки можно соединять по-разному, делая двигатель униполярным или биполярным. Но на поиск правильной последовательности подачи на них напряжения придётся затратить гораздо больше времени, чем в предыдущих случаях.
С. Долганов, г. Барабинск Новосибирской обл.
NEMA17-16-06PD-AMT112S Шаговый двигатель 1,4 А с энкодером — ROB-15078
Этот продукт имеет ограничения на доставку, поэтому он может иметь ограниченные варианты доставки или не может быть отправлен в следующие страны:
- Афганистан
- Албания
- Алжир
- Американское Самоа
- Андорра
- Ангола
- Ангилья
- Антарктида
- Антигуа и Барбуда
- Аргентина
- Армения
- Аруба
- Австралия
- Австрия
- Азербайджан
- Багамы
- Бахрейн
- Бангладеш
- Барбадос
- Беларусь
- Бельгия
- Белиз
- Бенин
- Бермуды
- Бутан
- Боливия
- Босния и Герцеговина
- Ботсвана
- Остров Буве
- Бразилия
- Британская территория в Индийском океане
- Бруней-Даруссалам
- Болгария
- Буркина-Фасо
- Бурунди
- Камбоджа
- Камерун
- Канада
- Кабо-Верде
- Каймановы острова
- Центральноафриканская Республика
- Чад
- Чили
- Китай
- Остров Рождества
- Кокосовые (Килинг) острова
- Колумбия
- Коморские острова
- Конго
- Острова Кука
- Коста-Рика
- Кот д’Ивуар
- Хорватия
- Кипр
- Чехия
- Дания
- Джибути
- Доминика
- Доминиканская Республика
- Восточный Тимор
- Эквадор
- Египет
- Сальвадор
- Экваториальная Гвинея
- Эритрея
- Эстония
- Эфиопия
- Фолклендские (Мальвинские) острова
- Фарерские острова
- Фиджи
- Финляндия
- Франция
- Французская Гвиана
- Французская Полинезия
- Южные территории Франции
- Габон
- Гамбия
- Грузия, Республика
- Германия
- Гана
- Гибралтар
- Греция
- Гренландия
- Гренада
- Гваделупа
- Гуам
- Гватемала
- Гвинея
- Гвинея-бисау
- Гайана
- Гаити
- Острова Херд и Макдональд
- Гондурас
- Гонконг
- Венгрия
- Исландия
- Индия
- Индонезия
- Ирак
- Ирландия
- Израиль
- Италия
- Ямайка
- Япония
- Иордания
- Казахстан
- Кения
- Кирибати
- Кувейт
- Кыргызстан
- Лаос
- Латвия
- Ливан
- Лесото
- Либерия
- Ливия
- Лихтенштейн
- Литва
- Люксембург
- Макао
- Македония, Республика
- Мадагаскар
- Малави
- Малайзия
- Мальдивы
- Мали
- Мальта
- Маршалловы Острова
- Мартиника
- Мавритания
- Маврикий
- Майотта
- Мексика
- Микронезия, Федеративные Штаты
- Молдова
- Монако
- Монголия
- Черногория
- Монтсеррат
- Марокко
- Мозамбик
- Мьянма
- Намибия
- Науру
- Непал
- Нидерланды
- Нидерландские Антильские острова
- Новая Каледония
- Новая Зеландия
- Никарагуа
- Нигер
- Нигерия
- Ниуэ
- Остров Норфолк
- Северные Марианские острова
- Норвегия
- Оман
- Пакистан
- Палау
- Панама
- Папуа-Новая Гвинея
- Парагвай
- Перу
- Филиппины
- Питкэрн
- Польша
- Португалия
- Пуэрто-Рико
- Катар
- Воссоединение
- Румыния
- Россия
- Руанда
- Сент-Китс и Невис
- Сент-Люсия
- Сент-Винсент и Гренадины
- Самоа
- Сан-Марино
- Сан-Томе и Принсипи
- Саудовская Аравия
- Сенегал
- Сербия
- Сейшелы
- Сьерра-Леоне
- Сингапур
- Словацкая Республика
- Словения
- Соломоновы Острова
- Сомали
- Южная Африка
- Южная Георгия и Южные Сандвичевы острова
- Южная Корея
- Испания
- Шри-Ланка
- Сент-Хелена
- Сен-Пьер и Микелон
- Суринам
- Острова Шпицберген и Ян-Майен
- Свазиленд
- Швеция
- Швейцария
- Тайвань
- Таджикистан
- Танзания, Объединенная Республика
- Таиланд
- Того
- Токелау
- Тонга
- Тринидад и Тобаго
- Тунис
- Турция
- Туркменистан
- Острова Теркс и Кайкос
- Тувалу
- Уганда
- Украина
- Объединенные Арабские Эмираты
- Соединенное Королевство
- Малые отдаленные острова США
- Уругвай
- Узбекистан
- Вануату
- Город-государство Ватикан (Святой Престол)
- Венесуэла
- Вьетнам
- Виргинские острова (Британия)
- Виргинские острова (США)
- Острова Уоллис и Футуна
- Западная Сахара
- Йемен
- Югославия
- Заир
- Замбия
- Зимбабве
Некоторые товары доставляются сторонними организациями.
Чтобы наш каталог был полным и постоянно расширялся, SparkFun сотрудничает с несколькими компаниями для доставки избранного списка наших продуктов.
Что это значит для меня?
- Заказанные товары могут быть доставлены в разные даты
- Заказанные товары могут быть доставлены в другой упаковке
- SparkFun будет продолжать заниматься поддержкой и возвратом этих товаров
Есть другие вопросы?
- Ознакомьтесь с нашей полной политикой прямой доставки
- Электронная почта [email protected]
- Позвоните нам по телефону 303-284-0979
- Дом
- Категории товаров
- Шаговый двигатель
- NEMA17-16-06PD-AMT112S 1.4A Шаговый двигатель с энкодером
Осталось всего 7!
РОБ-15078
RoHS
$
121,95
Наличие на складе
Примечание:
Обратите внимание, что этот продукт имеет ограничения на доставку в некоторые страны.
Какие страны?
Примечание:
Обратите внимание, что этот продукт доставляется только внутри США
.
Избранное
Любимый
1
Список желаний
Описание
Функции
Документы
Шаговые серводвигатели CUI сочетают в себе шаговый двигатель NEMA с инкрементными энкодерами серии AMT11, обеспечивая надежный двигатель и решение с обратной связью для управления перемещением. Этот шаговый двигатель NEMA имеет удерживающий крутящий момент до 0,445 Н·м, цифровую установку нулевого положения, запатентованную технологию емкостного энкодера ASIC и разрешение приращения до 409. 6ППр. Шаговые двигатели NEMA с инкрементным энкодером могут быть соединены с контроллером для обеспечения обратной связи с обратной связью для всей сервосистемы. Инкрементный энкодер можно запрограммировать с помощью программного обеспечения AMT Viewpoint™, не снимая энкодер с двигателя.
6ППр. Шаговые двигатели NEMA с инкрементным энкодером могут быть соединены с контроллером для обеспечения обратной связи с обратной связью для всей сервосистемы. Инкрементный энкодер можно запрограммировать с помощью программного обеспечения AMT Viewpoint™, не снимая энкодер с двигателя.
ПРИМЕЧАНИЕ Для подключения этого продукта требуется кабель с разъемом JAE FI-W17S. Вроде ТОЛ-16261.
- Энкодер CUI AMT112S + шаговый двигатель LIN Engineering
- Шаговый двигатель с энкодером для режима обратной связи в паре
с контроллером - Небольшой компактный размер корпуса NEMA 17
- Удерживающий момент 63 унции на дюйм (0,445 Н·м)
- Запатентованная технология ASIC емкостного энкодера
- Инкрементальное разрешение до 4096 PPR
- Разрешение, программируемое с помощью программного обеспечения AMT Viewpoint™ для ПК
- Цифровая установка нулевой позиции
- Технический паспорт
- Комментарии
5 - Отзывы
0
Пока нет отзывов.
Двигатели и энкодеры — Trinamic
Компания Trinamic предлагает все двигатели и приводы различных размеров и мощности, необходимые для идеальной установки. Эти приводы QMOT, разработанные для использования с ведущими в отрасли наборами функций, такими как специализированное управление напряжением и током, обеспечивают наилучшие результаты для вашего приложения. Для использования с решениями с замкнутым контуром эти двигатели также предлагаются с энкодерами, установленными сзади.
Популярные благодаря высокому крутящему моменту на низких скоростях и в состоянии покоя, шаговые двигатели являются предпочтительным приводом, когда требуется точное позиционирование. В сочетании с ведущими в отрасли технологиями Trinamic, позволяющими использовать характеристики шагового двигателя в ваших интересах, они преобразуют цифровую информацию в идеальное физическое движение, используя до 51 200 микрошагов на полный оборот.
| QSh3818-32-07-006 | 11 | 6Ncm | 28mm | 28mm | 32mm | |
| QSh3818-51-07-012 | 11 | 12Ncm | 0.68A | 28mm | 28mm | 51mm |
| QSh5218-35-10-027 | 17 | 27Ncm | 1.00A | 42mm | 42mm | 35mm |
| QSh5218-41-10-035 | 17 | 35Ncm | 1.00A | 42mm | 42mm | 41mm |
| QSh5218-47-28-040 | 17 | 40Ncm | 42mm | 42mm | 47mm | |
| QSh5218-51-10-049 | 17 | 49Ncm | 1.00A | 42mm | 42mm | 51mm |
| QSH5718-41-28-055 | 23 | 55Ncm | 2.80A | 57mm | 57mm | 41mm |
| QSH5718-51-28-101 | 23 | 101Ncm | 2.80A | 57mm | 57mm | 51mm |
| QSH5718-56-28-126 | 23 | 126Ncm | 57mm | 57mm | 56mm | |
| QSH5718-76-28-189 | 23 | 189Ncm | 2.80A | 57mm | 57mm | 76mm |
| QSH6018-45-28-110 | 24 | 110Ncm | 2.80A | 60mm | 60mm | 45mm |
| QSH6018-56-28-165 | 24 | 165Ncm | 2.80A | 60mm | 60mm | 56mm |
| QSH6018-65-28-210 | 24 | 210Ncm | 60mm | 60mm | 65mm | |
| QSH6018-86-28-310 | 24 | 310Ncm | 2.80A | 60mm | 60mm | 86mm |
| QSH8618-96-55-700 | 34 | 700Ncm | 5.50A | 86mm | 86mm | 96mm |
 68″> 0.68A
68″> 0.68A 8″> 2.80A
8″> 2.80A 8″> 2.80A
8″> 2.80A 8″> 2.80A
8″> 2.80A
2-phase stepper motors combined с небольшими оптическими энкодерами идеально подходят для энергосберегающих приводов с прямой обратной связью. Добавленный энкодер поддерживает сервоуправление для повышения эффективности, позволяя использовать двигатели меньшего размера. Кроме того, дополнительный мониторинг позволяет осуществлять профилактическое обслуживание и создавать более надежные конструкции, идеально подходящие для требовательных приложений.
| QSh3818-32-07-006-8k | 11 | 6Ncm | 0.68A | 28mm | 28mm | 47mm |
| QSh3818-51-07-012-8k | 11 | 12Ncm | 0.68A | 28mm | 28mm | 66mm |
| QSh5218-35-10-027-10k | 17 | 27Ncm | 1.00A | 42mm | 42mm | 53mm |
| QSh5218-51-10-049-10k | 17 | 49Ncm | 1. 00A 00A | 42mm | 42mm | 69mm |
| QSH5718-51-28-101-10k | 23 | 101Ncm | 2.80A | 57mm | 57mm | 73mm |
| QSH5718-76-28-189-10k | 23 | 189Ncm | 2.80A | 57mm | 57mm | 98mm |
| QSH6018-65-28-210-10k | 24 | 210Ncm | 2.80A | 60mm | 60mm | 83mm |
| QSH6018-86-28-310-10k | 24 | 310Ncm | 60mm | 60mm | 104mm | |
| QSH6018-86-90-300-10k | 24 | 300Ncm | 9.00A | 60 мм | 60 мм | 104 мм |
Электродвигатели постоянного тока известны своей долговечностью, эффективностью и управляемостью. Широко используемые во многих приложениях приводы BLDC обеспечивают относительно высокий крутящий момент с хорошим откликом на скорость. Особенно когда они превращаются в сервоприводы с лучшими в отрасли ИС и модулями Trinamic, они представляют собой надежные решения, которые служат всю жизнь.
| QBL4208-100-04-025 | 42mm | 25Ncm | 8 | 4000rpm | 42mm | 42mm | 100mm | |
| QBL4208-41-04-006 | 42mm | 6.25Ncm | 1.78A | 8 | 4000rpm | 42mm | 42mm | 41mm |
| QBL4208-61-04-013 | 42mm | 12.5Ncm | 3.48A | 8 | 4000rpm | 42mm | 42mm | 61mm |
| QBL4208-81-04-019 | 42mm | 18.5Ncm | 5.14A | 8 | 4000rpm | 42mm | 42mm | 81mm |
| QBL5704-116-04-042 | 57mm | 42Ncm | 4 | 4000rpm | 57mm | 57mm | 116mm | |
| QBL5704-94-04-032 | 57mm | 32Ncm | 5.08A | 4 | 4000rpm | 57mm | 57mm | 94mm |
Инкрементальные энкодеры являются ключевыми средствами при работе с двигателями BLDC. Они не только повышают производительность приложения, но и освобождают инженеров от растущего давления миниатюризации и энергоэффективности, позволяя использовать диски меньшего размера. Кроме того, двигатели BLDC с энкодерами повышают эффективность за счет сокращения времени простоя до минимума.
| QBL4208-100-04-025-1k | 42mm | 25Ncm | 7. 00A | 8 | 4000rpm | 42mm | 42mm | 118mm |
| QBL4208-61-04-013-1k | 42mm | 13Ncm | 3.50A | 8 | 4000rpm | 42 мм | 42 мм | 79 мм |
Мониторинг приводов не только повышает эффективность приложения, но и сообщает вам о состоянии, в котором они находятся. приложения, оптические инкрементальные энкодеры для бесколлекторных двигателей постоянного тока, а также шаговые двигатели позволяют использовать меньшие приводы в приложениях, открывая новые варианты использования.
| TMCS-20-4-8k-AT-01 | 32768 increments | 20mm | 4mm | TTL | yes |
| TMCS-28 -5-10K-AT-01 | 40000 Приращения | 28mm | 5mm | TTL | YES |
| TMCS-25-5-1K-AT-0608 | |||||
| TMCS-25-5-1K-AT-0108 | |||||
| TMCS-25-5-1K-AT-0108 | |||||
| TTL | yes | ||||
| TMCS-28-6. 35-10k-AT-01 | 40000 increments | 28mm | 6mm | TTL | yes |
| TMCS-28-6.35-1k-AT- 01 | 4096 increments | 28mm | 6mm | TTL | yes |
| TMCS-40-6.35-10k-AT-01 | 40000 increments | 40mm | 6mm | TTL | yes |
Обратная связь на шаговых двигателях для лучшего позиционирования и удержания (и уменьшения звона)
Шаговые двигатели с обратной связью не являются полной заменой серводвигателям, но они могут обеспечить надежную альтернативу для многих реальных приложений. Эти решения в области динамического дизайна повышают производительность машины, не нарушая бюджета.
Джим Стивенс • Специалист по продукту | POSITAL Inc.
Шаговые двигатели являются лучшим выбором для многих приложений управления движением и положением. Они доступны в широком диапазоне размеров и значений крутящего момента и значительно дешевле, чем высококлассные серводвигатели. Итак, давайте поговорим о способах повышения производительности шагового двигателя до уровня серводвигателей путем добавления устройств обратной связи.
Шаговый двигатель, оснащенный энкодером и управляемый как бесщеточный серводвигатель, эффективен… и дешевле, чем настоящий серводвигатель bldc.
Преимущества и недостатки шаговых двигателей для решения
Шаговые двигатели представляют собой бесщеточные электродвигатели постоянного тока, которые перемещаются дискретными шагами, а не непрерывно вращательным движением. Эти шаговые движения вызываются сдвигами магнитного поля наборами электромагнитных катушек в статоре. Работа шагового двигателя зависит от контроллера — электронное устройство, подающее ток на обмотки статора двигателя в последовательности, приводящей к шаговым движениям. Возможности контроллера оказывают значительное влияние на производительность двигателя.
Доступно несколько типов шаговых двигателей, но наиболее распространенные разновидности обеспечивают хорошее разрешение (200 шагов на оборот или лучше), а также приличный крутящий момент на низких скоростях, прочную конструкцию, длительный срок службы и относительно низкую стоимость. Однако у них есть ограничения. Выходной крутящий момент падает при более высоких скоростях вращения, и (с простыми контроллерами) шаговые двигатели могут быть подвержены звону — высокочастотным вибрациям. Самым большим недостатком является то, что даже в приложениях позиционирования базовые системы с шаговыми двигателями работают под управлением без обратной связи.
Шаговые двигатели реагируют на команды контроллера продвинуться на определенное количество шагов, но не возвращают контроллеру информацию о том, было ли это движение завершено. Таким образом, если двигатель не может выполнить запрошенные шаговые движения, может возникнуть растущее несоответствие между тем, что контроллер предполагает как вращательное положение вала двигателя, и истинным положением вала (и любых присоединенных нагрузок или приводных механизмов). Такие несоответствия возникают, когда крутящий момент двигателя недостаточен для преодоления механического сопротивления… и на самом деле эти несоответствия могут стать серьезной проблемой при высоких оборотах, потому что именно тогда возможности двигателя по выходному крутящему моменту ограничены. Вот почему инженеры-конструкторы часто завышают характеристики шаговых двигателей — чтобы избежать пропущенных шагов, даже если это делает выбор шаговых двигателей слишком большим и тяжелым для всех профилей движения, кроме самых требовательных.
Другим недостатком является то, что когда традиционный шаговый двигатель останавливается, ток должен протекать через обмотки двигателя, чтобы удерживать вал шагового двигателя в нужном положении. Это потребляет электроэнергию и нагревает обмотки двигателя и окружающие компоненты.
Этот комплект энкодера с полым валом большого диаметра от Posital Inc. подходит для использования с шаговыми двигателями с полым валом.
Обратная связь в системах с шаговыми двигателями для надежного позиционирования
Добавление энкодеров в систему с шаговыми двигателями для получения обратной связи о положении вала по существу замыкает контур управления. Добавление этих устройств обратной связи увеличивает общую стоимость системы, но не так сильно, как переход на серводвигатель.
Одним из подходов к добавлению обратной связи энкодера является работа в режиме перемещения и проверки . В этом случае к хвостовому валу шагового двигателя добавляется простой инкрементный энкодер. Затем, когда контроллер выдает двигателю пошаговые команды, энкодер постоянно подтверждает контроллеру, что заданные движения были выполнены. Если двигатель не выполняет запрошенное количество шагов, контроллер может запросить дополнительные шаги, пока двигатель не достигнет заданного положения. Более сложные контроллеры также увеличивают фазный ток в двигателе, чтобы повысить крутящий момент для выполнения этих дополнительных шагов.
Энкодеры, используемые в таких установках с перемещением и проверкой, обычно имеют разрешение, кратное 200 положениям на оборот.
Обратите внимание, что установки, использующие режимы перемещения и проверки, могут по-прежнему выигрывать от включения двигателей увеличенной мощности, но не до такой степени, которая требуется для простых систем с разомкнутым контуром.
Также обратите внимание, что этот режим может помочь интеллектуальным контроллерам точно настроить удерживающие токи в двигателе для небольшого повышения эффективности во время остановки… хотя общее потребление энергии по-прежнему остается высоким.
Шаговое управление с обратной связью с абсолютными энкодерами
Другим несколько более сложным вариантом для критически важных приложений управления положением является полностью замкнутая система управления с использованием многооборотных абсолютных энкодеров. Используемые здесь энкодеры прикрепляются к хвостовому валу шагового двигателя для контроля:
• углового положения шагового двигателя, а также
• количества полных оборотов шагового двигателя.
В этой конфигурации шаговый двигатель управляется подобно бесщеточному двигателю постоянного тока с большим числом полюсов, а энкодер постоянно обеспечивает обратную связь по положению с контроллером. Затем ток удержания, подаваемый на двигатель, точно соответствует величине, необходимой для поддержания положения в пределах заданного допуска положения. Шаговый двигатель, управляемый как бесщеточный серводвигатель, является энергоэффективным и менее дорогим, чем настоящий серводвигатель bldc. Так почему бы не использовать недорогие шаговые двигатели для всех сервоприводов bldc?
Шаговые двигатели, используемые в сервосистемах с замкнутым контуром, имеют физическое ограничение, которого нет у настоящих серводвигателей постоянного тока. В частности, управляемые таким образом шаговые двигатели по существу работают как 50-полюсные бесщеточные двигатели, поэтому не могут достигать скорости вращения, возможной с серводвигателями. Кроме того, роторы шаговых двигателей имеют более высокую инерцию, чем роторы настоящих серводвигателей постоянного тока эквивалентной мощности… поэтому они не могут обеспечить такое же ускорение.
Когда шаговый двигатель используется в режиме bldc, энкодер выполняет жизненно важную коммутация роль — сообщает точное положение вращения вала двигателя… что, в свою очередь, позволяет контроллеру активировать соответствующий набор электромагнитов статора для непрерывного вращения по мере необходимости. Кроме того, прецизионные абсолютные энкодеры также могут помочь усовершенствованным микрошаговым контроллерам в точной настройке фазного тока для уменьшения звона (вибрации), возникающего в более простых системах с шаговыми двигателями.
Правильный выбор энкодера для шагового двигателя
Как упоминалось выше, простой 9Инкрементальные энкодеры 0545 могут быть эффективными, когда шаговый двигатель используется в режиме перемещения и проверки. Инкрементальные энкодеры также поддерживают управление скоростью… хотя шаговые двигатели обычно не лучший выбор для непрерывной работы на постоянной скорости.
Абсолютные энкодеры , которые сообщают о поворотном положении вала, отлично подходят для осей критического позиционирования. Они выпускаются в автономных версиях (имеющих собственный закрытый корпус и вал) или в виде комплектов. Вот разница:
• Для автономных энкодеров требуется какая-либо муфта для соединения их с валом двигателя.
• Напротив, комплектные или модульные энкодеры интегрируются производителем станка в двигатель или приводной механизм для измерения вращательного движения непосредственно от приводного вала. Эти комплекты энкодеров могут быть встроены в корпус двигателя или прикреплены снаружи к концевому конусу двигателя.
Абсолютные магнитные энкодеры, которые измеряют обороты с помощью набора датчиков Холла, являются лучшим вариантом для управления шаговыми двигателями с обратной связью. Доступные как в виде автономных, так и в виде комплектов, они прочны и относительно нечувствительны к пыли, влаге и другим загрязнениям… а также просты в установке. Магнитные энкодеры, которые имеют форму комплекта, состоят из блока электроники (установленного на небольшой печатной плате) вместе с небольшой матрицей постоянных магнитов, прикрепленной к вращающемуся валу. Миниатюрные версии этих энкодеров в автономном исполнении (с внешним диаметром до 22 мм) доступны для особо малых двигателей.
Это изображение в разобранном виде 22-мм магнитного энкодера в сборе от Posital Inc. для особо малых приложений с шаговыми двигателями.
Многооборотные магнитные энкодеры могут отслеживать количество полных оборотов двигателя. Такие энкодеры полезны для управления приводными двигателями с помощью редукторов, червячных передач и кабельных барабанов. Счетчик оборотов для этих устройств построен на основе датчика Wiegand, который определяет полные обороты , а обеспечивает питание для схемы счетчика. Это гарантирует, что подсчет оборотов всегда будет точным, даже если обороты происходят, когда питание системы недоступно.
Комплект энкодеров Posital для шаговых двигателей включает магнитные, емкостные и оптические варианты.
Энкодеры с полым валом , использующие емкостное измерение, могут быть полезным вариантом в тех случаях, когда предпочтительнее устанавливать устройство измерения вращения на приводной стороне более крупных двигателей. Они доступны с многооборотными диапазонами измерения и центральным отверстием 30 и 50 мм.
Posital Inc. | www.posital.com
Шаговые двигатели с энкодером
Эти шаговые двигатели с высоким крутящим моментом теперь доступны с установленным энкодером. От Nema08 до Nema23.
Дополнительно:
|
| ||||
Узнайте больше об энкодере с SSI/BISS/квадратурным энкодером, одно- или абсолютным, многооборотным.
NEMA23/24/34 с энкодером JVL PA0260 с SSI/BISS/COSSIN и квадратурным инкрементным энкодером
| Крутящий момент [Нм] | Длина [мм] | Подключение двигателя / Номинальный ток | Соединения энкодера | Технология кодирования | Чертеж | Фото | |
| IP42 | |||||||
| МСТ171С16БТ2ДЖИ4.0ДЖ | 0,18 | 55 | M12 5pM L код 4 А | M12 8 пФ А код | Абс. Инкрементный 16384 CPR | ||
| МСТ176С35БТ2ДЖЛ4. 0Дж | 0,78 | 88 | M12 5pM L код 4 А | M12 8 пФ А код | Абс. Инкрементный 16384 CPR | ||
| MST231S01BT2JI6.0J | 0,97 | 89 | M12 L код 6,0 А | М12, 8 контактов, гнездо | Абс. Инкрементный 16384 CPR | ||
| MST232S01BT2JI6.0J | 1,97 | 110 | M12 L код 6,0 А | М12, 8 контактов, гнездо | Абс. Инкрементный 16384 CPR | ||
| MST232B087WBKI5.0JUL | 2,3 | 77 | 4 провода 100 мм 5,0 А | 10 контактов для SSI или ABZ* | Абс. Инкрементный 16384 CPR | ||
| MST234S03BT2JI6.0J | 3,08 | 147 | M12 L код 6,0 А | М12, 8 контактов, гнездо | Абс. Инкрементный 16384 CPR | ||
| MST234B437WBKI5.0JUL | 3,2 | 112 | 4 провода 100 мм 5,0 А | 10 контактов для SSI или ABZ* | Абс. Инкрементный 16384 CPR | ||
| МСТ340К49БТ2СК9.0Дж | 3,0 | 95 | M12 L код 9,0 А | M12 8-контактный гнездовой | Абс. SSI 16384 КПП | ||
| IP65-67 | |||||||
| МСТ171С61БТ2ДЖИ4.0Дж | 0,18 | 55 | M12 5pM L код 4 А | M12 8 пФ А код | Абс. Инкрементный 16384 CPR | ||
| MST176S62BT2JL4.0J | 0,78 | 88 | M12 5pM L код 4 А | M12 8 пФ А код | Абс. Инкрементный 16384 CPR | ||
| MST231S02BT2JI6.0J | 0,97 | 89 | M12 L код 6,0 А | М12, 8 контактов, гнездо | Абс. Инкрементный 16384 CPR | ||
| MST232S02BT2JI6.0J | 1,97 | 110 | M12 L код 6,0 А | М12, 8 контактов, гнездо | Абс. Инкрементный 16384 CPR | ||
| MST234S04BT2JI6.0J | 3,08 | 147 | M12 L код 6,0 А | М12, 8 контактов, гнездо | Абс. Инкрементный 16384 CPR | ||
| МСВ241Б234Г1СК3.0Дж | 1,3 | М12 А код 3,0 А | М12, 8 контактов, гнездо | Абс. SSI 16384 КПП | |||
| МСВ241Б234З1СК3.0Дж | 1,3 | М12 А код 3,0 А | М12, 8 контактов, гнездо | Абс. Инкрементный 16384 CPR | |||
| МСТ340К50БТ2СК9.0Дж | 3,0 | 95 | M12 L код 9,0 А | М12, 8 контактов, гнездо | Абс. Инкрементный 16384 CPR | ||
*Список кабельных принадлежностей см. ниже.
Нужен другой интерфейс, разрешение или просто нужна помощь в определении номера заказа? Щелкните эту ссылку для получения информации о заказе PA0260
NEMA08 — 34 с недорогим инкрементным энкодером
| Крутящий момент [Нм] | Длина [мм] | Разъем двигателя / Номинальный ток | Технология кодирования | Чертеж | Фото | ||
| IP42 | |||||||
| Nema08 с энкодером HS20A-1000 | |||||||
| МСТ082А393ВАЭ2. 80К | 0,029 | 55 | 4 провода 300 мм 0,8 А | 8-контактный разъем A+, A-, B+, B-, Z+, Z- (UL2464) 300 мм | Диск/Считыватель 1000 CPR | ||
| Nema17 с инкрементным энкодером | |||||||
| МСТ174А403З0Э23.0К | 0,43 | 69,1 | Кабель 4-жильный 1 м 3,0 А | Кабель 6-жильный 1 м | Диск/Считыватель 1000 CPR | ||
| Nema23 с инкрементным энкодером | |||||||
| МСТ232Б434З0Э24. 2К | 1,96 | 98 | Кабель 4-жильный 1 м 4,2 А | Кабель 8 жил 1 м | Диск/Считыватель 1000 CPR | ||
| МСТ232Б013З2Э26.0К | 1,6 | 95 | Кабель 4-жильный 400 мм 6,0 А | Кабель 6 жил 0,4 м | Диск/Считыватель 1000 CPR | ||
| МСТ232Б083З0Э24.0К | 2,2 | 95 | Кабель 4-жильный 1 м 4,0 А | Кабель 6-жильный 1 м | Диск/Считыватель 1000 CPR | ||
| МСТ234Б483З0Э25. 6К | 3,0 | 132 | Кабель 4-жильный 1 м 5,6 А | Кабель 6-жильный 1 м | Диск/Считыватель 1000 CPR | ||
| IP67 | |||||||
| Nema23 с инкрементным энкодером | |||||||
| МСВ231Б254В1Э24.0К | 1,2 | Кабель M12 A, код 1 м 4,0 А | Кабель 8 жил 1 м | Диск/Считыватель 1000 CPR | |||
| МСВ241Б254В1Э24.0К | 1,3 | Кабель M12 A, код 1 м 4,0 А | Кабель 8 жил 1 м | Диск/Считыватель 1000 CPR | |||
Список корпусов энкодера и вариантов подключения
| Питание M12 / энкодер M12 | PG Кабель питания 1 м / кодировщик M12 | PG Кабель питания 1 м / Кабель энкодера PG 1 м | Кабель питания 1 м / кабель кодировщика 1 м | Провод питания 300 мм / Проводной энкодер 300 мм |
| Опция: G1 | Опция: Z1 | Опция: V0 | Опция: Z0 | Опция: WA |
| *ВНИМАНИЕ* На фото показан 5-контактный разъем двигателя «мама», на самом деле разъем 5-контактный «папа» | Свободный конец кабеля | Оба свободных конца | Оба свободных конца | Оба свободных конца |
| Двигатель 100 мм, 4 провода, энкодер установлен сзади без корпуса | PG Кабель питания 1 м, M12, 5 контактов, вилка / энкодер M12 | PG Кабель питания 1 м M12 5-конт. изготовитель / PG Кабель энкодера 1 м M12 8-конт. гнездо | Кабель питания 1 м, M12, 5 контактов, вилка / кабель энкодера, 1 м, M12, 8 контактов, гнездо | Корпус с 1x M12, код L, 5-контактный, вилочный, и 1xM12, код A, 8-контактный, гнездовой |
| Опция: WB | Опция: Z3 | Опция: V1 | Опция: ZX | Опция: T2 |
| Свободный конец провода двигателя. Ниже приведен список способов подключения к этому кодировщику | M12 на конце троса | M12 на конце троса | M12 на конце троса |
Перечень кабельных принадлежностей для энкодера PA0260
| 10-контактный разъем 65 мм с M12 8-контактный штекер, для puls/dir | 10-контактный разъем 0,5 м с 10-проводным свободным концом | Кабель QS IO 1 м 16xAWG28+экран Ø6 мм | ||
| Артикул: WG0807 | Артикул: WG0795 | Артикул: WG1001 | ||
Контроллеры шаговых двигателей
| SMC66 с корпусом | SMC85 с корпусом | |||
| Ток до 6 А среднеквадратичного значения | Среднеквадратический ток до 9 А | |||
EL7041 | Терминал EtherCAT, 1-канальный интерфейс управления движением, шаговый двигатель, 48 В пост.
тока, 5 А, с инкрементным энкодером
- Технические данные
- Данные о жилье
К началу
Technical dataHousing data
| Technical data | EL7041, ES7041 | EL7041-1000 | |||
|---|---|---|---|---|---|
| Technology | compact drive technology | ||||
| Connection method | direct motor connection + feedback | ||||
| Количество входов | 2 x Конечная позиция, 1 X Encoder | ||||
| Тип нагрузки | 2-фазовый ход. Количество выходов | 1 x шаговый двигатель | |||
| Напряжение питания электроники | 24 В пост. тока (через силовые контакты) | ||||
| Напряжение питания | 8…48 В пост. тока (внешнее) 850593 | Выходной ток | макс. 5,0 A | ||
| Шаговая частота | настраивается до 8000 полных шагов/с | ||||
| Шаговый шаблон | 64-кратный микрошаговый | ||||
| ок. 30 кГц | |||||
| Разрешение | прибл. 5000 позиций в тип. применения (на оборот) | ||||
| Входной сигнал энкодера | 5…24 В пост. тока, тип. 5 мА, несимметричный | ||||
| Подключение энкодера | A, B, C, затвор/защелка | ||||
| Входная частота | макс. 400 000 инкрементов/с (с 4-кратной оценкой) | ||||
| Потребляемый ток, силовые контакты | тип. 50 мА | ||||
| Потребляемый ток Электронная шина | тип. 140 мА | ||||
| Распределенные часы | да | ||||
| Специальные функции | Контроль пройденного пути, вход энкодера | Для резонансных применений, вход Encoder | |||
| Электрическая изоляция | 500 В (E-BUS/Потенциал Полета) | ||||
| Относительная составность | 95 % | ||||
| 9508 % | |||||
| . 90 г | |||||
| Температура эксплуатации/хранения | 0…+55 °C/-25…+85 °C | ||||
| ЭМС-устойчивость/излучение | соответствует EN 61000-6-2/EN 6-1000 4 | ||||
| Вибро-/ударопрочность | соответствует EN 60068-2-6/EN 60068-2-27 | ||||
| Защита. рейтинг/установка поз. | IP20/see documentation | ||||
| Pluggable wiring | for all ESxxxx terminals | ||||
| Approvals/markings | CE, UL | ||||
- Технические данные
- Данные о жилье
К началу
Технические характеристики Данные корпуса
| Данные корпуса | EL-24-2x8pin | ES-24-2x8pin | 0595 | terminal housing with pluggable wiring level |
|---|---|---|
| Material | polycarbonate | |
| Dimensions (W x H x D) | 24 mm x 100 mm x 68 mm | |
| Installation | on 35 mm DIN rail , в соответствии с EN 60715 с замком | |
| Монтаж рядом с помощью | двойного паза и ключевого соединения | |
| Маркировка | Маркировка серии BZxxx | |
| Электропроводка | одножильный провод (e), гибкий провод (f) и наконечник (a): приведение в действие пружиной отвертки | |
| Сечение соединения | s*: 0,08…2,5 мм², st*: 0,08…2,5 мм², st*: 0 …2,5 мм², f*: 0,14…1,5 мм² | s*: 0,08…1,5 мм², st*: 0,08…1,5 мм², f*: 0,14…1,5 мм² | s*: AWG 28…16, ST*: AWG 28… 16, F*: AWG 26… 16 |
| Длина расчивания | .
| |