Содержание
3) Энергетическая диаграмма асинхронного двигателя
За
время dt
электрическая
энергия P1dt,
потребляемая
асинхронным двигателем из сети,
преобразовывается в механическую P2dt.
При
работе машины неизбежно происходит
потеря преобразуемой ею энергии и,
следовательно, потребляемая двигателем
мощность Р1
будет
больше полезной Р2,
развиваемой
на валу двигателя.
Процесс
преобразования энергии и потери,
происходящие при работе двигателя,
можно иллюстрировать энергетической
диаграммой (рис. 22.1). Потребляемая
двигателем мощность из сети P1
= m1U1l1
cosφ1
частично расходуется на покрытие потерь
в обмотках статора Рm1
=т1I12r1
и
в стали сердечника статора Рс1
на
гистерезис и вихревые токи. Оставшаяся
Оставшаяся
часть мощности Pэм
= P1—Рm1—Рс1,
называемая
электромагнитной, передается ротору
через воздушный зазор вращающимся
магнитным полем. Энергия, полученная
ротором, преобразуется в механическую
и частично расходуется на покрытие
потерь в роторе. На диаграмме показано,
что электромагнитная мощность, поступающая
на ротор, может быть представлена в виде
суммы двух мощностей: Рэм=P’2
+Pm2
Так
как сердечник ротора при работе двигателя
перемагничивается с малой частотой
pns/6O=f2=Sf1
то
потери в стали ротора будут также малы
(на энергетической диаграмме они не
показаны).
Не
вся энергия, преобразованная машиной
в механическую (P’2dt)
является
полезной энергией P2dt,
так
как часть ее расходуется на покрытие
механических потерь Pмехdt
от
трения в подшипниках и о воздух
вращающихся частей машины. Таким образом,
Таким образом,
мощность, развиваемая вращающимся
ротором, P’2=P2+Pмех
энергетической диаграммы следует, что
Pэм—P’2=Pm2 ‘
(22.1)
Так
как мощность может быть представлена
произведением момента, развиваемого
машиной, на угловую частоту, то (22.1)
можно
придать следующий вид:
MΩ1—MΩ2=Pm2=m2I22r2,
(22.2)
где
М~
электромагнитный
момент, развиваемый машиной; Ω1,
Ω2—
угловые
частоты вращения поля статора И ротора;
т2—число
фаз ротора; I2—
ток в фазе обмотки вращающегося ротора;
r2
—
активное сопротивление фазы обмотки
ротора.
Выражение
(22.2) можно преобразовать к виду ,
MΩ1—MΩ2=
MΩ1(Ω1
— Ω2
)
/
Ω1=Pэм*Sоткуда
Pm2=SPэм
(22.3)
т.
е. потери в меди обмотки ротора определяются
произведением скольжения на электромагнитную
мощность. Из (22.3) получим
Pэм=Pm2/S=m1I22r2/S
(22. 4)
4)
или
после приведения параметров обмотки
ротора к цепи статора
Pэм=m1(I’2)2r’2/S
Максимального
значения КПД двигателя достигает при
нагрузке, близкой к номннальной. Двигатели
малой и средней мощности имеют номинальный
КПД
в
пределах 70…90%, двигатели большей мощности
имеют КПД
примерно
94…96%.
Билет
5.1. Способы
представления син. величин:
1)
изображение в прямоугольных координатах:
с помощью графического изображения в
прямоугольных координатах можно находить
опережающую и отстающую син. величины.
2)
векторное изображение син. ЭДС, напряжений,
токов: рис. 2.11
3)
в виде тригонометрических функций:
пример: u=Umsin(ωt+ψu).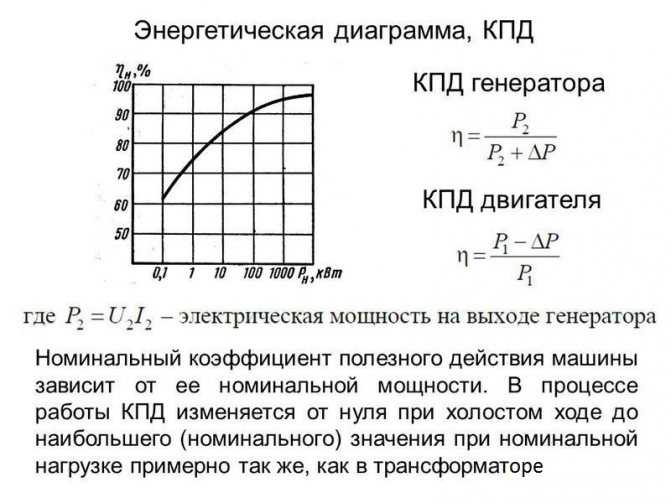
4)в
виде комплексных чисел.
З-ны
Кирхгофа в комплексной фазе:
1)Сумма
комплексных токов в узле равно нулю:
2)Сумма
комплексных ЭДС в контуре равна сумме
комплексных падений напряжения в этом
контуре:
.
З-н
Ома в комплексной форме:
и
,
где коэффициент
— комплексное электрическое сопротивление.
2.
Режимом
короткого замыкания трансформатора
называют
такой режим, когда выводы вторичной
обмотки замкнуты проводом с сопротивлением,
равным нулю (Zн
= 0).
Короткое замыкание трансформатора в
условиях эксплуатации создает
аварийный режим, так как вторичный
ток, а следовательно, и первичный
увеличиваются в несколько раз по
сравнению с номинальным. Поэтому в
цепях с трансформаторами предусматривают
защиту, которая при коротком замыкании
автоматически отключает трансформатор.
Опыт
короткого замыкания.
Этот опыт проводят для определения
параметров трансформатора. Собирают
электрическую цепь, соответствующую
схеме (рис. 7.22), в которой вторичная
7.22), в которой вторичная
обмотка замкнута накоротко металлической
перемычкой или проводником с сопротивлением,
близким к нулю. К первичной обмотке
подводят такое напряжение, при котором
ток в ней равен номинальному значению
I1ном.Измеряют
напряжение Uк,
ток I1ном
и
активную мощность Рк
потребляемой энергии.
В режиме короткого замыкания Uк
очень мало, поэтому потери мощности
в магнитопроводе Рп0
~ U12
в
сотни раз меньше, чем при номинальном
напряжении. Таким образом, можно считать,
что Рп0
= 0, и измеряемая ваттметром мощность
Рпк
— это мощность потерь энергии,
затрачиваемой на нагрев обмоток
трансформатора. Поэтому можно считать,
что мощность Рпк
соответствует электрическим потерям
в обмотках трансформатора. Ее называют
электрическими
потерями или
потерями
короткого замыкания.
По
данным измерений определяют следующие
три параметра трансформатора:
1)
напряжение короткого замыкания ик
=
(Uк/U1ном)*100%;
2)
мощность потерь короткого замыкания
Рпк
при I1=I1ном;
3)
полное, активное и индуктивное
сопротивления трансформатора: Zk=Uk/I1ном;
Rk=Pпк/I21ном;
Xk=
.
Зная сопротивления
Zk,
Rk
и Хк
трансформатора,
можно построить треугольник
напряжений короткого замыкания
(треугольник
ОАВ
на
рис. 7.21), а также определить активную
и индуктивную составляющие напряжения
короткого замыкания: Uка=Uкcosφк
; Uкр=Uкsinφк
.
Энергетическая диаграмма асинхронного двигателя | Электрические машины
- Подробности
- Категория: Оборудование
- электродвигатель
Содержание материала
- Электрические машины
- Основные электромагнитные схемы электрических машин
- Устройство многофазных обмоток
- Магнитное поле и МДС многофазных обмоток
- Электродвижущие силы, индуктируемые в обмотке
- Асинхронные машины
- Явления в асинхронной машине при неподвижном роторе
- Явления в асинхронной машине при вращающемся роторе
- Уравнения, схема замещения и векторная диаграмма
- Энергетическая диаграмма асинхронного двигателя
- Механическая характеристика асинхронной машины
- Статическая устойчивость асинхронной машины
- Экспериментальное исследование асинхронных двигателей
- Рабочие характеристики асинхронного двигателя
- Двигатели с улучшенными пусковыми свойствами
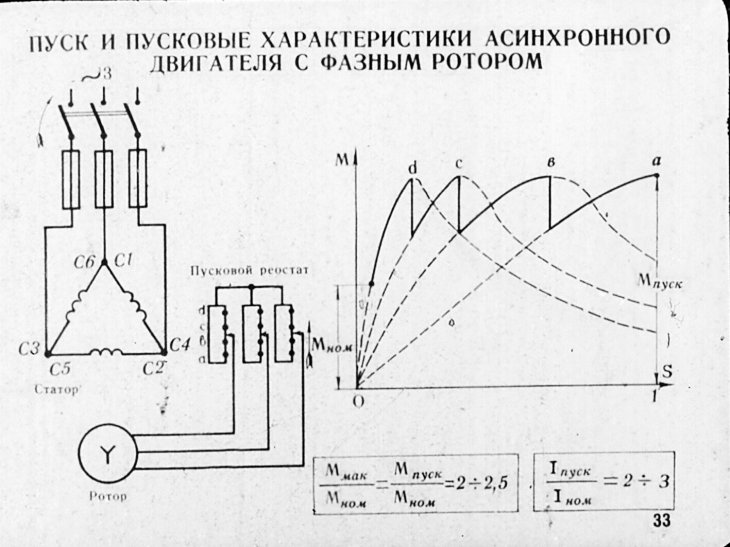
- Пуск асинхронных двигателей
- Регулирование частоты вращения асинхронных двигателей
- Несимметричные режимы работы асинхронных двигателей
- Однофазные асинхронные двигатели
- Генераторный режим асинхронной машины
- Трансформаторный режим асинхронной машины
- Синхронные машины
- Магнитное поле синхронной машины при холостом ходе
- Расчет магнитной цепи синхронной машины при хх
- Магнитное поле синхронной машины при нагрузке
- Приведение МДС обмотки статора к МДС возбуждения
- Уравнения напряжений и векторные диаграммы
- Уравнения векторные диаграммы с учетом насыщения
- Работа на автономную нагрузку
- Параллельная работа синхронных машин
- Включение генератора в сеть
- Регулирование активной мощности синхронной машины
- Регулирование реактивной мощности синхронной машины
- Угловая характеристика синхронной машины
- Статическая устойчивость синхронной машины
- U-образные характеристики
- Синхронные двигатели
- Синхронные компенсаторы
- Несимметричные режимы синхронных генераторов
- Внезапное трехфазное кз синхронного генератора
- Качания и динамическая устойчивость синхронной машины
- Машины постоянного тока
- ЭДС обмотки якоря и электромагнитный момент
- Магнитное поле машины постоянного тока при нагрузке
- Коммутация
- Генераторы постоянного тока
- Характеристики генераторов с самовозбуждением
- Параллельная работа генераторов постоянного тока
- Двигатели постоянного тока
- Характеристики двигателя постоянного тока
- Регулирование частоты вращения
Страница 10 из 51
Энергетическая диаграмма позволяет судить о характере распределения мощности, потребляемой двигателем из сети.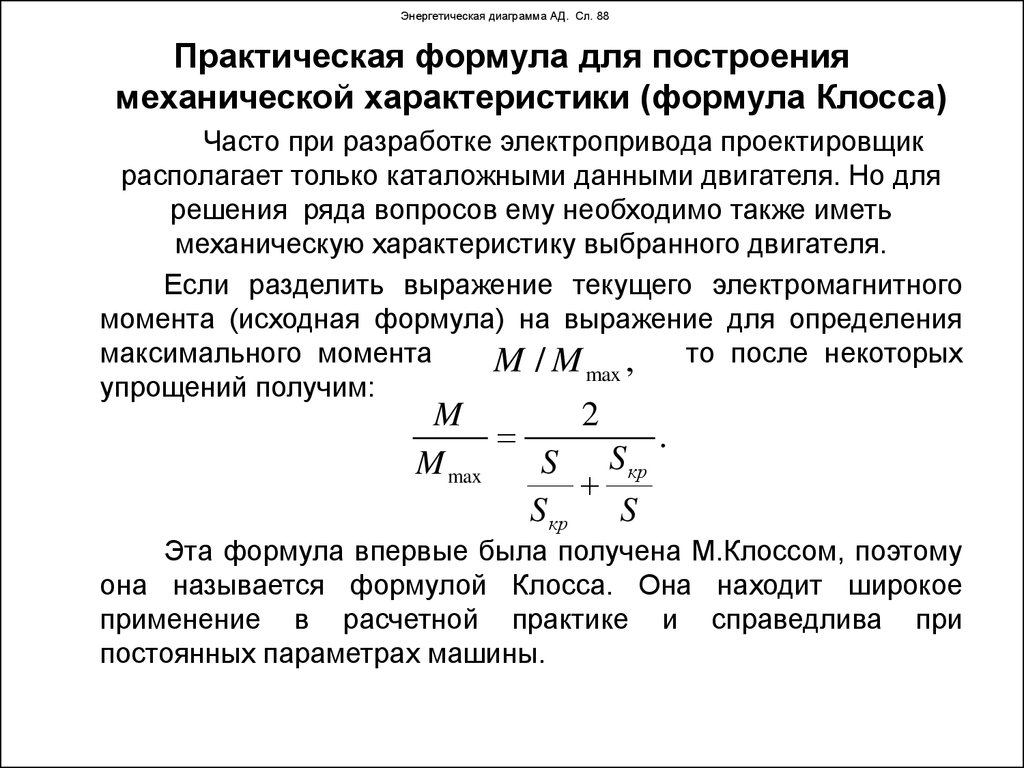 Ее можно получить с помощью векторной диаграммы (рис.4.9). При работе асинхронный двигатель потребляет из сети активную мощность
Ее можно получить с помощью векторной диаграммы (рис.4.9). При работе асинхронный двигатель потребляет из сети активную мощность
.
Из векторной диаграммы можно получить следующие соотношения:
С учетом этих соотношений выражение для мощности преобразуется к виду
.
Отсюда следует, что мощность расходуется в статоре на покрытие электрических потерь в обмотке статора,
и на покрытие потерь в стали,
.
Остальная мощность поступает через воздушный зазор в ротор. Эта мощность определяет электромагнитный момент двигателя, поэтому ее называют электромагнитной мощностью
.
Из векторной диаграммы можно получить следующее соотношение:
,
поэтому для электромагнитной мощности справедливо второе выражение:
.
Часть электромагнитной мощности, как мы выяснили выше, теряется в виде электрических потерь в обмотке ротора,
,
а остальная часть мощности преобразуется в механическую мощность
.
Часть механической мощности теряется внутри самой машины в виде механических потерь , магнитных потерь и добавочных потерь . Механические потери включают потери на трение и на вентиляцию. Их расчет выполняется по эмпирическим формулам. Магнитные потери обычно малы и отдельно не определяются , а учитываются в вместе с потерями в стали статора. Добавочные потери вызваны в основном высшими гармониками магнитных полей. Они трудно поддаются расчету. Поэтому добавочные потери оценивают приближенно величиной 0,5% от номинальной мощности двигателя.
Полезная мощность на валу двигателя
.
В соответствии с изложенным энергетическую диаграмму двигателя можно представить в виде, показанном на рис. 4.10. Сумма потерь определяет КПД двигателя
.
КПД двигателей мощностью от 1 кВт до 1000 кВт лежит в пределах .
- Назад
- Вперёд
- Назад
 org/BreadcrumbList»>
org/BreadcrumbList»>Еще по теме:
- Испытания по определению электрических величин электрических машин
- Основные повреждения электродвигателей
- Двигатели типа ДАБ
- Методы сушки электрических машин
- Автоматизация испытаний электрических машин
|
Навигация:
Топ: Оснащения врачебно-сестринской бригады. Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья…
Интересное: Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными… Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы… Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным…
Дисциплины:
|
Стр 1 из 8Следующая ⇒ Энергетическая диаграмма асинхронной машины в двигательном режиме При работе асинхронной машины в двигательном режиме ее ротор под воздействием положительного электромагнитного момента, направленного в сторону перемещения магнитного поля, вращается со скоростью, меньшей скорости поля. Активная мощность Р1, потребляемая асинхронным двигателем из m1 – фазной сети, преобразуется в механическую мощность Р2 передаваемую через вал рабочему механизму с неизбежными потерями в различных частях машины, рис.1.
Рис.1. Энергетическая диаграмма асинхронного двигателя (а), схема связей между элементами двигателя (б). Мощность двигателя, потребляемая из m1-фазной сети, равна P1=m1U1I1cosφ1 (1) где U1; I1 — фазные напряжение и ток статора; φ1 — угол между векторами напряжения и тока статора (φ1 считается положительным, если ток отстает от напряжения). Часть мощности Р1 теряется в статоре в виде электрических потерь ΔРЭ1 в активном сопротивлении обмотки и в виде магнитных потерь ΔPМ1 в стали сердечника. РЭМ = Р1 — ΔРЭ1 — ΔPM1 = ω1М , (2) где М — электромагнитный момент; ω1=2πf1/p — угловая скорость вращения магнитного поля; f1 — частота сети; р — число пар полюсов асинхронного двигателя. Часть электромагнитной мощности РЭМ тратится в виде потерь DРЭЛ2 в активном сопротивлении обмотки ротора. Так как при номинальной угловой скорости вращения асинхронного двигателя частота перемагничивания стали ротора невелика (f2=1 – 3 Гц), то магнитные потери в стали малы и их обычно не учитывают. Тогда полная механическая мощность, развиваемая двигателем, равна РМЕХ=PЭМ — ΔРЭ2=ωМ, (3) где ω — угловая скорость вращения ротора. Механическая мощность, отдаваемая асинхронным двигателем рабочему механизму, равна P2=PМЕХ — ΔРМЕХ — ΔРд, (4) где ΔРМЕХ — потери мощности на трение в подшипниках и вентиляционные; ΔРд — добавочные потери мощности, вызванные высшими гармоническими МДС обмоток. Коэффициент полезного действия асинхронного двигателя равен η=P2 / P1. (5) Электромеханическое преобразование энергии происходит в асинхронной машине во всех режимах, кроме режимов холостого хода и короткого замыкания. Включение добавочных сопротивлений в цепь ротора Конструктивные особенности асинхронной машины с фазным ротором позволяют в каждую фазу обмотки ротора включить добавочные сопротивления — активные или реактивные. Введение добавочных сопротивлений в цепь ротора дает возможность ограничить величину пускового тока, увеличить до значения максимального пусковой момент, осуществить плавный запуск двигателя и т. Энергетическая диаграмма асинхронной машины в двигательном режиме При работе асинхронной машины в двигательном режиме ее ротор под воздействием положительного электромагнитного момента, направленного в сторону перемещения магнитного поля, вращается со скоростью, меньшей скорости поля. Активная мощность Р1, потребляемая асинхронным двигателем из m1 – фазной сети, преобразуется в механическую мощность Р2 передаваемую через вал рабочему механизму с неизбежными потерями в различных частях машины, рис.1.
Рис.1. Энергетическая диаграмма асинхронного двигателя (а), схема связей между элементами двигателя (б). Мощность двигателя, потребляемая из m1-фазной сети, равна P1=m1U1I1cosφ1 (1) где U1; I1 — фазные напряжение и ток статора; φ1 — угол между векторами напряжения и тока статора (φ1 считается положительным, если ток отстает от напряжения). Часть мощности Р1 теряется в статоре в виде электрических потерь ΔРЭ1 в активном сопротивлении обмотки и в виде магнитных потерь ΔPМ1 в стали сердечника. Оставшаяся часть представляет собой электромагнитную мощность РЭМ, которая передается из цепи статора в цепь ротора посредством вращающегося магнитного поля РЭМ = Р1 — ΔРЭ1 — ΔPM1 = ω1М , (2) где М — электромагнитный момент; ω1=2πf1/p — угловая скорость вращения магнитного поля; f1 — частота сети; р — число пар полюсов асинхронного двигателя. Часть электромагнитной мощности РЭМ тратится в виде потерь DРЭЛ2 в активном сопротивлении обмотки ротора. Так как при номинальной угловой скорости вращения асинхронного двигателя частота перемагничивания стали ротора невелика (f2=1 – 3 Гц), то магнитные потери в стали малы и их обычно не учитывают. РМЕХ=PЭМ — ΔРЭ2=ωМ, (3) где ω — угловая скорость вращения ротора. 12345678Следующая ⇒ Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций… Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого… Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим… Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства…
|
 Оставшаяся часть представляет собой электромагнитную мощность РЭМ, которая передается из цепи статора в цепь ротора посредством вращающегося магнитного поля
Оставшаяся часть представляет собой электромагнитную мощность РЭМ, которая передается из цепи статора в цепь ротора посредством вращающегося магнитного поля
 д.
д.
 Тогда полная механическая мощность, развиваемая двигателем, равна
Тогда полная механическая мощность, развиваемая двигателем, равна PowerFactor-EnergyConservation
Энергосбережение является горячей темой в наши дни, и все «знают», что низкий коэффициент мощности может означать потерю электроэнергии.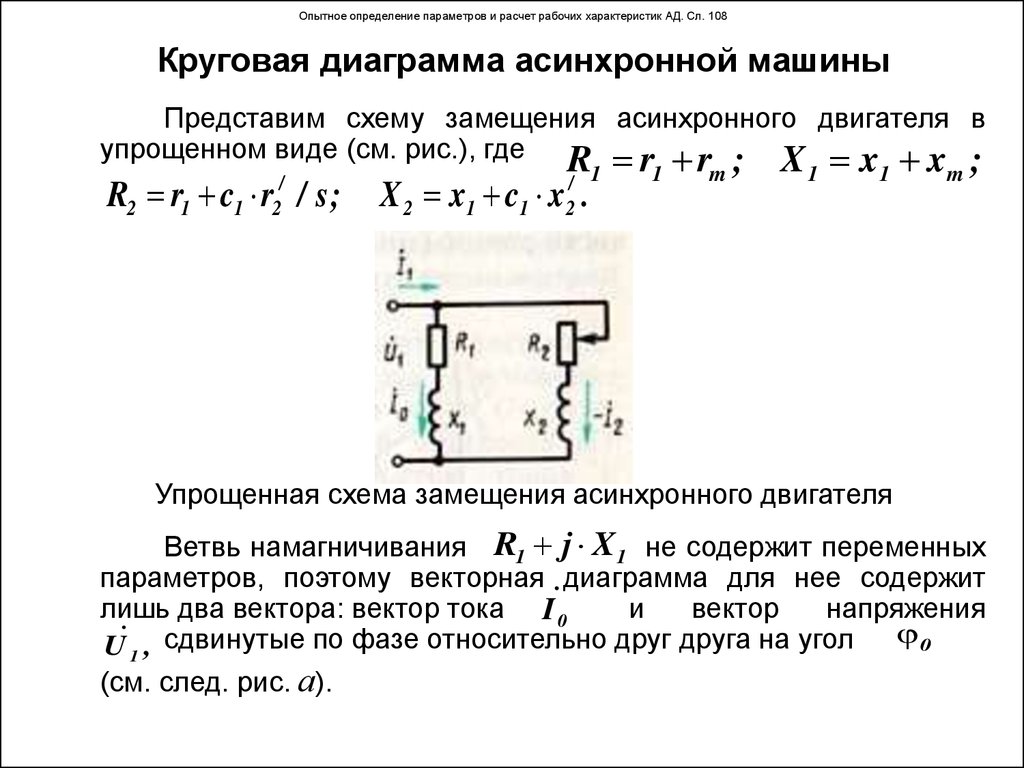 Много вопросов задают о коэффициенте мощности асинхронных двигателей. Некоторые конкуренты подчеркивают высокий коэффициент мощности своих двигателей. Почему бы и нет?
Много вопросов задают о коэффициенте мощности асинхронных двигателей. Некоторые конкуренты подчеркивают высокий коэффициент мощности своих двигателей. Почему бы и нет?
Асинхронные двигатели являются лишь одним из видов электрооборудования, которое снижает коэффициент мощности установки. При этом учитывается коэффициент мощности всей системы предприятия. Существуют способы корректировки низкого коэффициента мощности системы, поэтому максимальный коэффициент мощности двигателя не является жизненно важным. Коррекция коэффициента мощности системы часто является лучшим способом.
Краткий обзор теории
Истинная мощность , измеряемая в ваттах (Вт), представляет собой мощность, потребляемую электрическим сопротивлением системы, которая выполняет полезную работу.
Реактивная мощность , измеряемая в вольт-амперах, реактивная (ВАР) представляет собой мощность, накапливаемую и отводимую асинхронными двигателями, трансформаторами и соленоидами, потребляющими реактивную мощность.
Полная мощность , измеряемая в вольт-амперах (ВА), представляет собой напряжение в системе переменного тока, умноженное на весь ток, протекающий в ней. Это векторная сумма активной и реактивной мощности.
Коэффициент мощности — это отношение фактической мощности, используемой в системе, к полной мощности, потребляемой от источника. Обычно выражается в процентах: Вт/ВА x 100. Косинус угла между ВА и Вт на этой векторной диаграмме ø является мерой коэффициента мощности. Чем больше ток VAR, тем ниже коэффициент мощности.
Только реальная мощность (Вт) в системе совершает полезную работу. Но утилита должна генерировать и распределять то, что действительно течет: Полная мощность (ВА). Коммунальные службы обычно измеряют только ватты, но коммунальные службы могут измерить общий коэффициент мощности предприятия, и обычно взимают штраф за тариф, если этот коэффициент мощности низкий. На предприятии система распределения электроэнергии также должна быть рассчитана на распределение и коммутацию полной мощности, а не только полезных ватт. Короче говоря, разница между полезной мощностью и полной мощностью, на которую указывает коэффициент мощности, представляет собой мощность, которая не работает, но стоит пользователю денег.
Короче говоря, разница между полезной мощностью и полной мощностью, на которую указывает коэффициент мощности, представляет собой мощность, которая не работает, но стоит пользователю денег.
Почему не высокий коэффициент мощности двигателя?
Как показано на диаграмме, если вектор реактивной мощности короткий, коэффициент мощности будет высоким. Таким образом, может показаться, что двигатели с высоким коэффициентом мощности помогут, потому что они будут вносить меньший вклад в общий вектор реактивной мощности системы. Но… Во-первых: нагрузка двигателя может не иметь большого влияния на коэффициент мощности системы. Это верно, когда:
- Нагрузка двигателя относительно мала по сравнению с резистивной нагрузкой (Вт) на систему предприятия, потребляемой таким оборудованием, как освещение предприятия и резистивное отопление.
- Большая часть нагрузки асинхронных двигателей представлена большими высокоскоростными двигателями. Их коэффициент мощности изначально высок, и коэффициент мощности меньшего количества небольших двигателей не будет иметь большого значения.

- На заводе используются синхронные двигатели. Они не увеличивают вектор VAR, показанный на диаграмме, они имеют тенденцию уменьшать его.
- Двигатели являются лишь частью индуктивной нагрузки, отвечающей за длину вектора реактивной мощности диаграммы. Практически на любом заводе есть силовые трансформаторы, вероятно, сварочные трансформаторы, возможно, электромагнитные механизмы и оборудование для индукционного нагрева. Также существует «паразитная индуктивность» в проводке установки, и теоретически эти системы проводки являются чисто резистивными нагрузками.
- Высокий коэффициент мощности двигателя приводит к нерациональному использованию, если двигатель слишком велик для рабочей нагрузки или большую часть времени работает при пониженной нагрузке.

В описанных выше ситуациях высокий коэффициент мощности двигателя не будет сильно влиять на общий коэффициент мощности системы. Вероятно, недостаточно, чтобы оправдать стоимость и другие недостатки двигателей, рассчитанных на максимальный коэффициент мощности.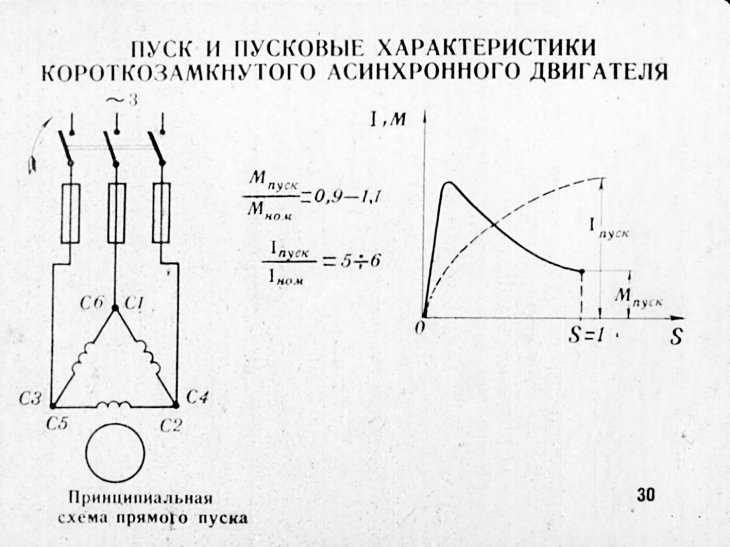
Второй: Вы не получите такую же хорошую конструкцию двигателя, сосредоточившись на высоком коэффициенте мощности. Разработчик двигателя должен учитывать ряд параметров, таких как повышение температуры, характеристики крутящего момента и КПД, а также коэффициент мощности, и он не может оптимизировать их все. Попытка разработать двигатель с высоким коэффициентом мощности и высокой эффективностью обходится дорого, а некоторые конструктивные изменения, улучшающие коэффициент мощности, такие как уменьшенный воздушный зазор, на самом деле оказывают противоположное влияние на эффективность.
Лучший способ
Независимо от того, как двигатели влияют на коэффициент мощности системы, его можно исправить, и это лучший способ. Вектор VAR на приведенной выше диаграмме представляет собой индуктивное реактивное сопротивление. Но есть еще и емкостное реактивное сопротивление, которое создает противоположный вектор VAR. Если на систему воздействуют оба вида реактивного сопротивления, они имеют тенденцию компенсировать друг друга. На приведенной ниже векторной диаграмме системы емкостная реактивная мощность почти так же велика, как индуктивная реактивная мощность, поэтому W более близко к ВА, а Вт/ВА x 100 — коэффициент мощности системы — является высоким.
На приведенной ниже векторной диаграмме системы емкостная реактивная мощность почти так же велика, как индуктивная реактивная мощность, поэтому W более близко к ВА, а Вт/ВА x 100 — коэффициент мощности системы — является высоким.
Как:
Иногда вращающиеся конденсаторы используются для создания емкостного реактивного сопротивления в системе предприятия, но статические конденсаторы более распространены. Может быть, один центральный банк для корректировки всей системы завода или банк на каждом из нескольких центров нагрузки завода. Или индивидуальная установка конденсатора на каждый двигатель. Какой из этих подходов лучше всего подходит для данного предприятия, требует анализа многих переменных, и мы не можем давать общие рекомендации. Сомневающийся покупатель должен обратиться к крупным производителям конденсаторов за подробной информацией и советом специалиста.
Подводя итоги
Теперь вы понимаете, почему мы не используем самый высокий коэффициент мощности, предусмотренный в конструкции двигателя.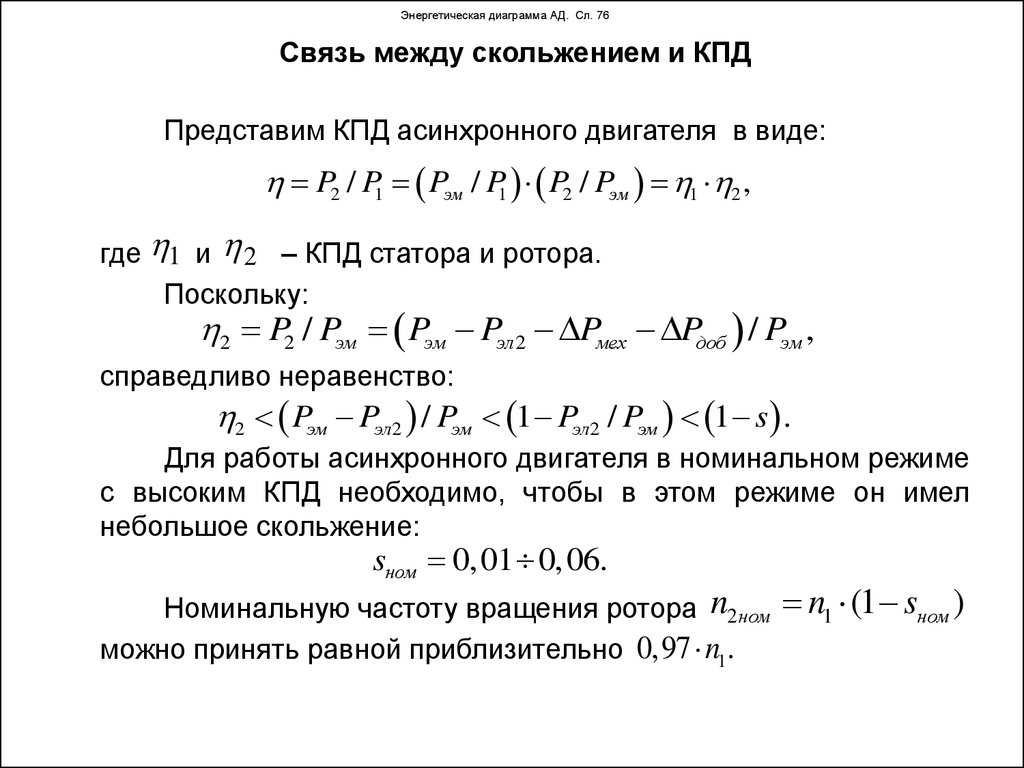 Эффективность и другие желательные характеристики должны быть заложены в двигатель, потому что нет хорошего способа — внешнего по отношению к двигателю — добиться их эффекта. Но влияние коэффициента мощности двигателя на коэффициент мощности системы предприятия, в какой бы степени оно ни оказывалось, может быть компенсировано внешними средствами, а конденсаторы могут улучшить коэффициент мощности до 95-98%, что является большим улучшением, чем может быть реализовано в двигателе. . Внешняя коррекция имеет большое преимущество, заключающееся в корректировке трансформаторов и другого оборудования в системе предприятия, которое также имеет тенденцию к снижению коэффициента мощности. С помощью конденсаторов системный коэффициент мощности объекта может быть «адаптирован» в соответствии со структурой выставления счетов коммунального предприятия, так что объект платит только за коррекцию коэффициента мощности в той степени, которая действительно сэкономит деньги.
Эффективность и другие желательные характеристики должны быть заложены в двигатель, потому что нет хорошего способа — внешнего по отношению к двигателю — добиться их эффекта. Но влияние коэффициента мощности двигателя на коэффициент мощности системы предприятия, в какой бы степени оно ни оказывалось, может быть компенсировано внешними средствами, а конденсаторы могут улучшить коэффициент мощности до 95-98%, что является большим улучшением, чем может быть реализовано в двигателе. . Внешняя коррекция имеет большое преимущество, заключающееся в корректировке трансформаторов и другого оборудования в системе предприятия, которое также имеет тенденцию к снижению коэффициента мощности. С помощью конденсаторов системный коэффициент мощности объекта может быть «адаптирован» в соответствии со структурой выставления счетов коммунального предприятия, так что объект платит только за коррекцию коэффициента мощности в той степени, которая действительно сэкономит деньги.
Как работает асинхронный двигатель? Объясняется диаграммой
Электрический двигатель — это электрическая машина, преобразующая электрическую энергию в механическую.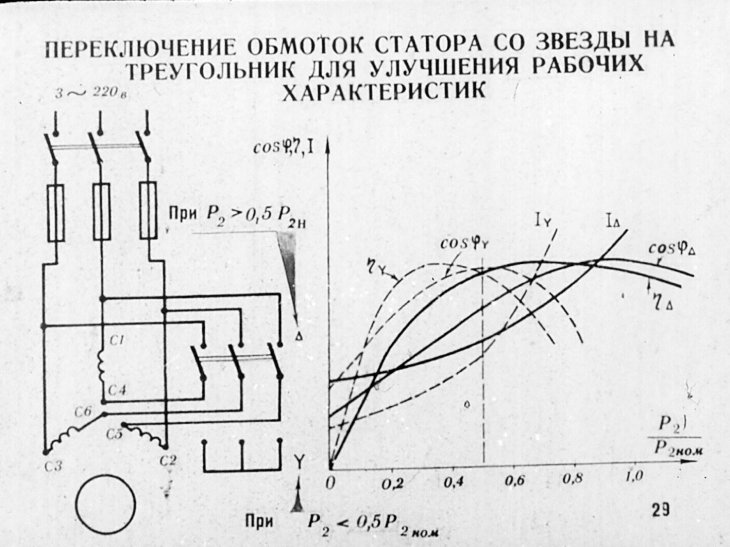 В зависимости от типа источника питания существует три типа электродвигателей: 1. Двигатель постоянного тока (работает от источника постоянного тока) 2. Двигатель переменного тока (работает от источника переменного тока) 3. Универсальный двигатель (работает как от переменного, так и от постоянного тока) поставлять). Наиболее пригодные двигатели переменного тока работают по принципу электромагнитной индукции, поэтому их называют асинхронными двигателями. Асинхронный двигатель является наиболее удобным двигателем и имеет много преимуществ. В этой статье мы узнаем принцип работы асинхронного двигателя.
В зависимости от типа источника питания существует три типа электродвигателей: 1. Двигатель постоянного тока (работает от источника постоянного тока) 2. Двигатель переменного тока (работает от источника переменного тока) 3. Универсальный двигатель (работает как от переменного, так и от постоянного тока) поставлять). Наиболее пригодные двигатели переменного тока работают по принципу электромагнитной индукции, поэтому их называют асинхронными двигателями. Асинхронный двигатель является наиболее удобным двигателем и имеет много преимуществ. В этой статье мы узнаем принцип работы асинхронного двигателя.
Трехфазный асинхронный двигатель состоит из двух основных частей — статора и ротора. Статор состоит из трехфазной обмотки, которая должна быть подключена к источнику питания. Ротор свободно вращается и имеет короткозамкнутую обмотку.
Таким образом, когда трехфазный источник питания подается на обмотку статора, он создает вращающееся магнитное поле (RMF). Как только магнитное поле создается обмоткой статора, между обмоткой статора и ротора возникает электромагнитная индукция. Поскольку обмотка ротора закорочена, она также создает магнитное поле. Теперь из-за взаимодействия между магнитным полем ротора и магнитным полем статора крутящий момент развивается на роторе, и ротор начинает вращаться, поскольку он свободно вращается.
Поскольку обмотка ротора закорочена, она также создает магнитное поле. Теперь из-за взаимодействия между магнитным полем ротора и магнитным полем статора крутящий момент развивается на роторе, и ротор начинает вращаться, поскольку он свободно вращается.
Асинхронный двигатель работает по тому же принципу, что и трансформатор. Здесь мы можем рассматривать обмотку статора как первичную обмотку, а обмотку ротора как вторичную обмотку. Так что не интересно, как работает асинхронный двигатель, но более интересно и необходимо знать, как вращающееся магнитное поле создает поле в статоре, ради которого вращается асинхронный двигатель.
Читайте также: Объяснение преимуществ и недостатков асинхронного двигателя
Как возникает вращающееся магнитное поле (RMF) в асинхронном двигателе?
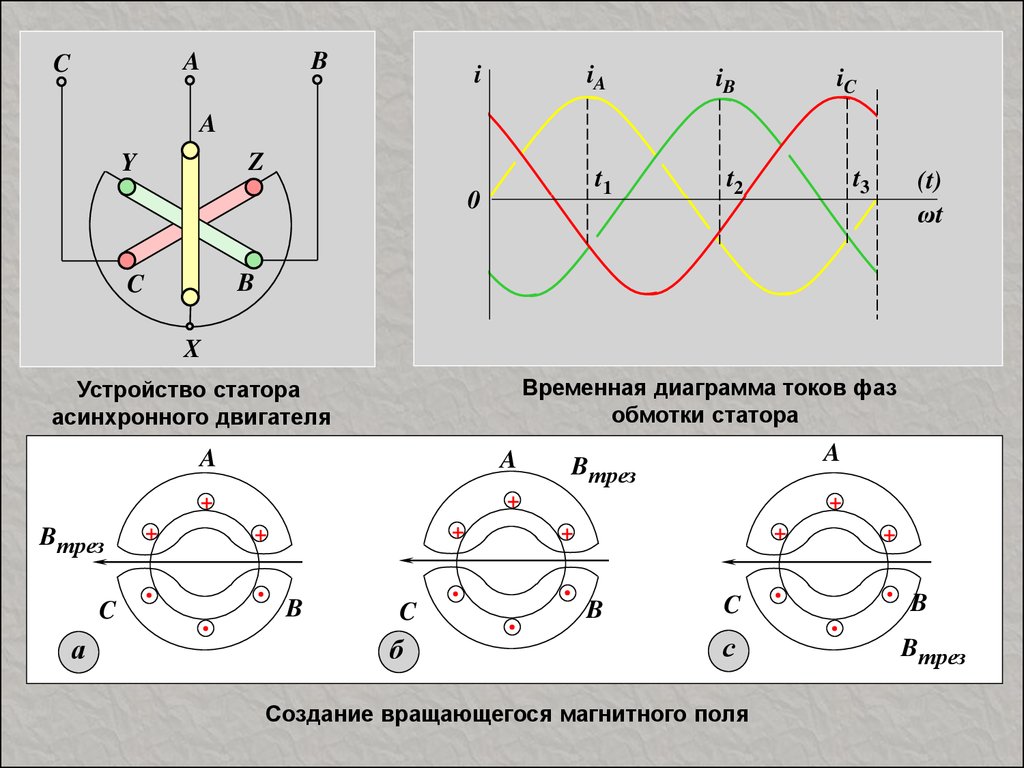
RMF или вращающееся магнитное поле является основным явлением вращения асинхронного двигателя. Создание вращающегося магнитного поля зависит от расположения обмотки статора, частоты и переменного свойства трехфазного источника переменного тока. Величина и полярность источника переменного тока изменяются со временем. Величина всегда достигает нулевого значения и своего пикового значения. В трехфазном источнике переменного тока напряжение во всех трех фазах не достигает пикового значения одновременно.
Величина и полярность источника переменного тока изменяются со временем. Величина всегда достигает нулевого значения и своего пикового значения. В трехфазном источнике переменного тока напряжение во всех трех фазах не достигает пикового значения одновременно.
На приведенной выше диаграмме вы можете видеть, что сначала фаза R достигает своего пикового значения, затем фаза Y, затем фаза B. Таким образом, это свойство очень помогает создавать вращающееся магнитное поле в асинхронном двигателе.
Ниже приведена схема, чтобы было легче понять, как ротор вращается при изменении магнитного поля.
Здесь вы можете видеть, что обмотка статора имеет три витка — A, B, C. На практике очень много витков расположены таким образом. Чтобы было проще понять, возьмем только три катушки. Вы можете видеть, что катушки A, B, C подключены к фазам R, Y, B соответственно. Теперь, если трехфазный источник переменного тока подается на обмотку статора, в соответствии с характером трехфазного источника питания сначала будет под напряжением катушка A, затем катушка B, затем катушка C, и это будет повторяться в зависимости от частоты.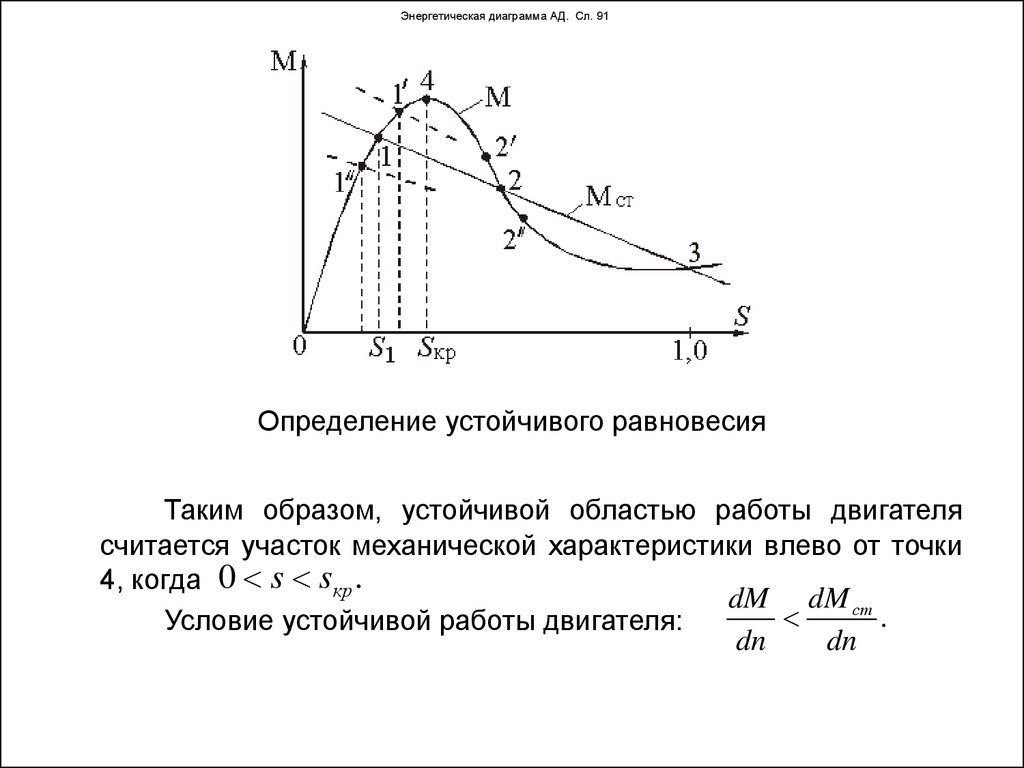 поставлять. Итак, теперь вы можете понять, что катушки A, B, C находятся под напряжением таким образом, что создают вращающееся магнитное поле. Таким образом, ротор асинхронного двигателя вращается с вращающимся магнитным полем.
поставлять. Итак, теперь вы можете понять, что катушки A, B, C находятся под напряжением таким образом, что создают вращающееся магнитное поле. Таким образом, ротор асинхронного двигателя вращается с вращающимся магнитным полем.
См. также: Объяснение воздействия перенапряжения и перенапряжения на двигатель
Скорость асинхронного двигателя
Скорость асинхронного двигателя или скорость ротора полностью зависит от скорости вращающегося магнитного поля или RMF, потому что из-за этого только ротор может вращаться. Итак, если мы контролируем скорость RMF, скорость ротора также будет контролироваться. Скорость вращающегося магнитного поля называется синхронной скоростью.
Скорость вращающегося магнитного поля можно контролировать двумя способами — 1. Управление частотой 2. Увеличением и уменьшением числа. полюсов.
Второй способ — увеличение и уменьшение числа. полюсов невозможно, когда двигатель находится в рабочем состоянии, поэтому используется первый метод, управление частотой.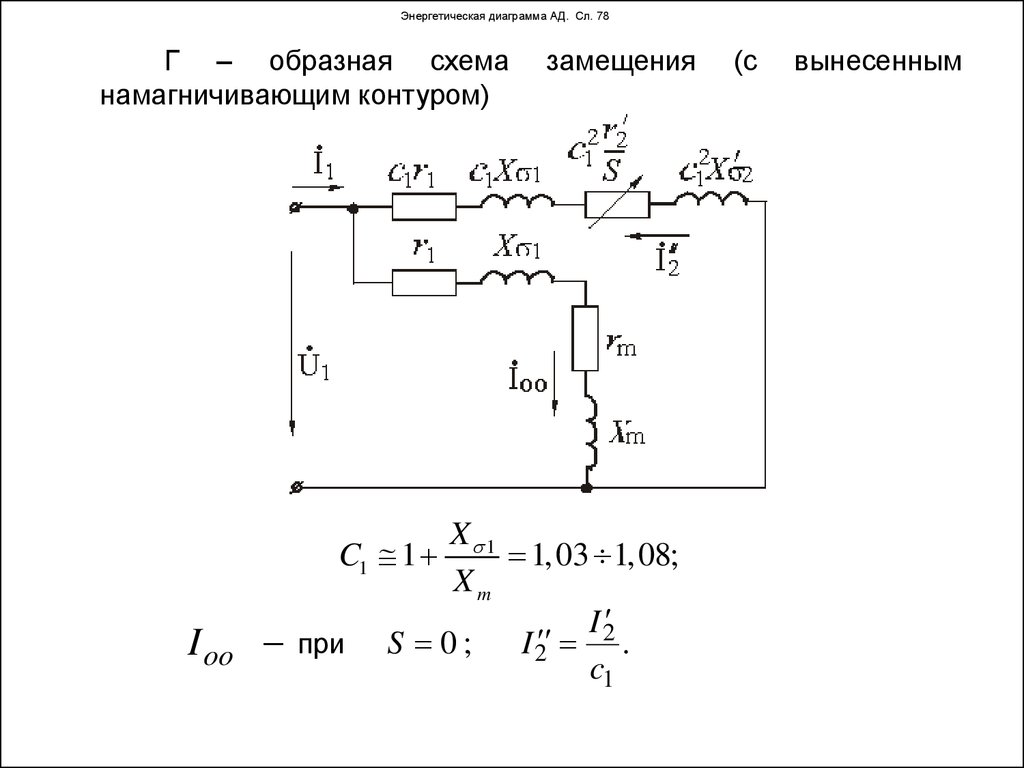 Когда частота трехфазного источника переменного тока увеличивается, скорость также увеличивается, и наоборот.
Когда частота трехфазного источника переменного тока увеличивается, скорость также увеличивается, и наоборот.
Помните, что скорость асинхронного двигателя не может точно регулироваться путем изменения напряжения питания, потому что большое изменение напряжения очень мало влияет на изменение скорости. На самом деле не рекомендуется изменять напряжение питания при подключении к большой нагрузке. Асинхронный двигатель с большой нагрузкой всегда должен работать при номинальном напряжении. Если мы внезапно понизим напряжение питания ниже номинального напряжения, он будет потреблять чрезмерный ток, и обмотка может сгореть. Так, управление скоростью путем изменения напряжения питания подходит только для однофазных или маломощных асинхронных двигателей.
Читайте также:
Благодарим вас за посещение сайта. продолжайте посещать для получения дополнительных обновлений. Кроме того, подпишитесь на этот блог со своим идентификатором электронной почты.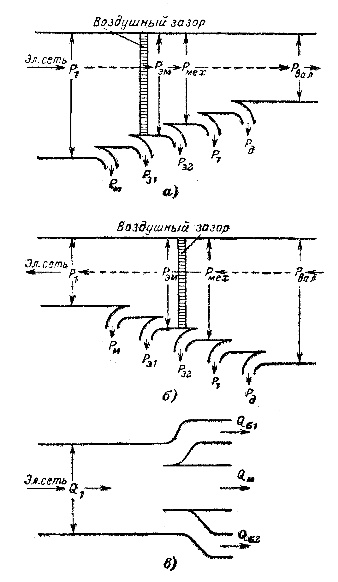
Асинхронные двигатели — Подвал схем
Асинхронные двигатели на сегодняшний день являются наиболее распространенным типом электродвигателей. Это связано с тем, что они просты по конструкции, относительно дешевы в производстве и чрезвычайно надежны, поскольку фактически имеют только одну движущуюся часть. В отличие от двигателей постоянного тока или универсальных двигателей, для передачи энергии на ротор не требуются щетки или скользящие контакты — как мы увидим, это происходит за счет индукции. В отличие от двигателей с постоянными магнитами или бесщеточных двигателей постоянного тока (BLDC), здесь не требуются экзотические магниты или датчики положения ротора на эффекте Холла.
Давайте начнем с рассмотрения типичного трехфазного асинхронного двигателя, обычно используемого в промышленных условиях. Это иллюстрирует принципы работы, применимые к другим типам. Неподвижная часть двигателя, статор, имеет три обмотки, каждая из которых подключена к разным фазам входящего питания.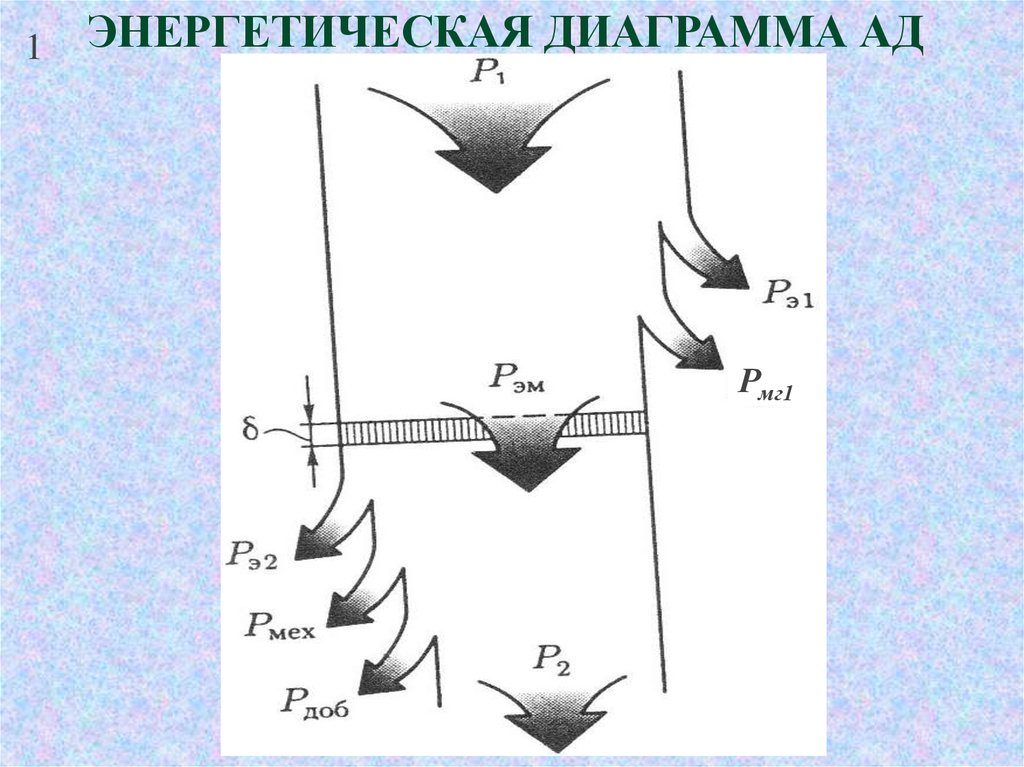 Они расположены чередующимся образом, поэтому они создают вращающееся магнитное поле. На рис. 1 показан двигатель в разобранном виде. Вы можете просто увидеть обмотки статора с правой стороны, идущие параллельно оси двигателя в пазах статора под полосами изоляционного материала.
Они расположены чередующимся образом, поэтому они создают вращающееся магнитное поле. На рис. 1 показан двигатель в разобранном виде. Вы можете просто увидеть обмотки статора с правой стороны, идущие параллельно оси двигателя в пазах статора под полосами изоляционного материала.
РИСУНОК 1. На этой фотографии показано, как устроен типичный небольшой трехфазный асинхронный двигатель. Обмотки статора проходят в пазах статора параллельно оси двигателя. Ротор изготовлен из стальных пластин с заделанными в них «обмотками» ротора в виде алюминиевых стержней. Вы можете видеть только верхнюю часть стержней, идущую под небольшим углом к оси статора. Стержни закорочены алюминиевыми кольцами, видимыми на концах пакета ротора.
На рис. 2 показано упрощенное поперечное сечение статора, который состоит из множества тонких пластин стали, как сетевой трансформатор. Обмотки представлены на схеме красными, зелеными и синими кружками. Точка в круге обозначает положительный ток, текущий от нас, а крестик — текущий к нам. Ток, протекающий по обмотке, создаст магнитное поле под прямым углом к обмотке вдоль соответствующей оси, показанной пунктиром. Размер и направление этого поля будут зависеть от полярности и величины тока в любой момент времени.
Ток, протекающий по обмотке, создаст магнитное поле под прямым углом к обмотке вдоль соответствующей оси, показанной пунктиром. Размер и направление этого поля будут зависеть от полярности и величины тока в любой момент времени.
РИСУНОК 2. На этой упрощенной диаграмме показано, как трехфазный ток создает вращающийся вектор потока. Каждый «моментальный снимок» делается в точке на одну шестую цикла позже, чем предыдущий. Отдельные обмотки создают магнитное поле, угол и величина которого зависят от полярности и величины питающего тока. Они складываются, чтобы получить вектор чистого потока, показанный толстой черной стрелкой. При таком расположении обмоток вектор потока плавно поворачивается вокруг статора один раз за каждый цикл сети (электросети).
В точке A сетевого цикла, например, ток красной фазы будет иметь максимальное положительное значение, а токи зеленого и синего будут отрицательными и немного меньшими по величине. Создаваемые ими поля показаны в виде векторов (стрелок) соответствующего цвета. Таким образом, чистое магнитное поле будет направлено влево, как показано жирным черным вектором. В точке B на осциллограмме (одна шестая цикла или 60° позже) ток зеленой фазы будет иметь максимальное отрицательное отклонение, а токи красной и синей фаз будут положительными, но с немного меньшей величиной. Это приводит к чистому вектору потока, как показано на B.
Таким образом, чистое магнитное поле будет направлено влево, как показано жирным черным вектором. В точке B на осциллограмме (одна шестая цикла или 60° позже) ток зеленой фазы будет иметь максимальное отрицательное отклонение, а токи красной и синей фаз будут положительными, но с немного меньшей величиной. Это приводит к чистому вектору потока, как показано на B.
Аналогично работает для точки C и так далее. Трехфазная обмотка создает магнитное поле, которое плавно вращается вокруг статора один раз за каждый цикл сети. Это соответствует скорости вращения 50 оборотов в секунду или 3000 об/мин для сети 50 Гц и 3600 об/мин для сети 60 Гц. Такое расположение известно как 2-полюсная конфигурация. так как есть 2 полюса (северный и южный) каждой фазной обмотки.
Если мы чередуем другие обмотки набора, как показано на рисунке 3 9 0008 тот же анализ показывает, что вектору чистого потока теперь требуется два цикла сети (электросети), чтобы вращаться вокруг статора. Наш вектор потока теперь вращается со скоростью 1500 об/мин или 1800 об/мин в зависимости от частоты сети.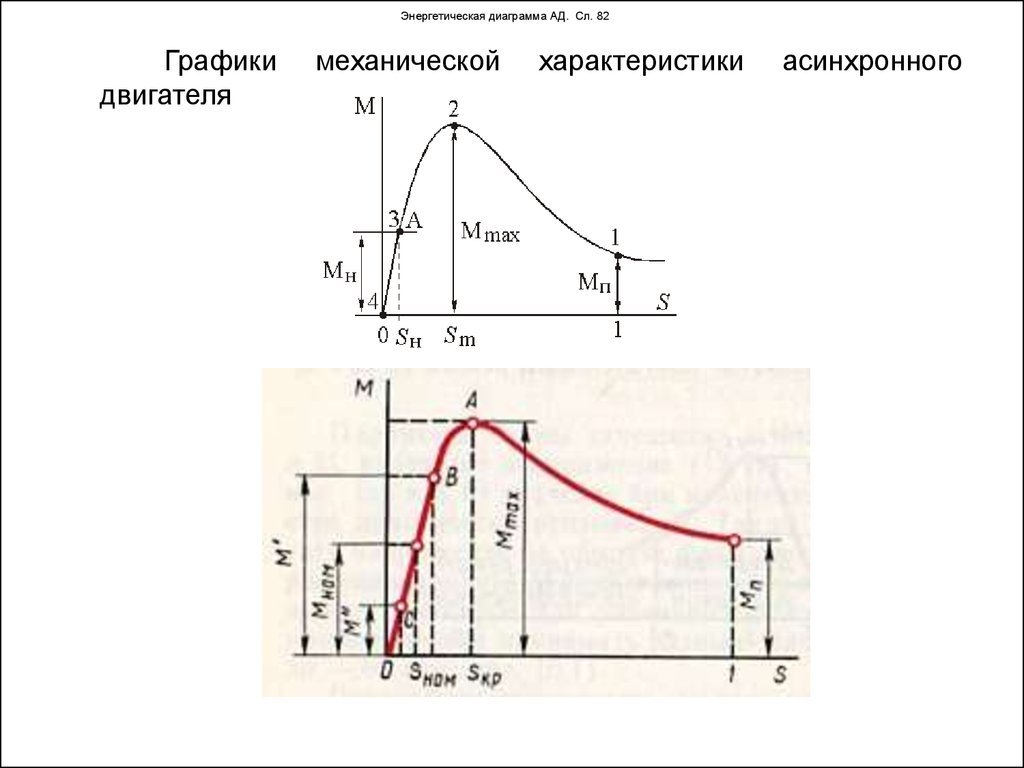 Это известно как 4-полюсная конфигурация. небольшие асинхронные двигатели, такие как этот, обычно доступны в 2-, 4-, 6- или (редко) 8-полюсных конфигурациях. Скорость вращающегося вектора потока известна как синхронная скорость (n s ) асинхронного двигателя. Как мы увидим, вал не вращается с этой скоростью.
Это известно как 4-полюсная конфигурация. небольшие асинхронные двигатели, такие как этот, обычно доступны в 2-, 4-, 6- или (редко) 8-полюсных конфигурациях. Скорость вращающегося вектора потока известна как синхронная скорость (n s ) асинхронного двигателя. Как мы увидим, вал не вращается с этой скоростью.
— РЕКЛАМА—
—Реклама здесь—
РИСУНОК 3. Чередование второго набора обмоток, как показано здесь, дает вектор потока, который вращается со скоростью, вдвое меньшей, чем на рисунке 2. Эта конфигурация известна как четырехполюсный двигатель. . Поле вращается с синхронной скоростью 1500 об/мин для сети 50 Гц и 1800 об/мин для 60 Гц.
А теперь об удивительной штуке. Если мы вставим ротор, который также имеет набор обмоток, мы получим ток, протекающий по этим обмоткам за счет действия трансформатора. можно посмотреть с Рисунок 1 что ротор также изготовлен из многослойной стали, а «обмотки» обычно представляют собой алюминиевые стержни, залитые в пазы и закороченные алюминиевым кольцом на каждом конце.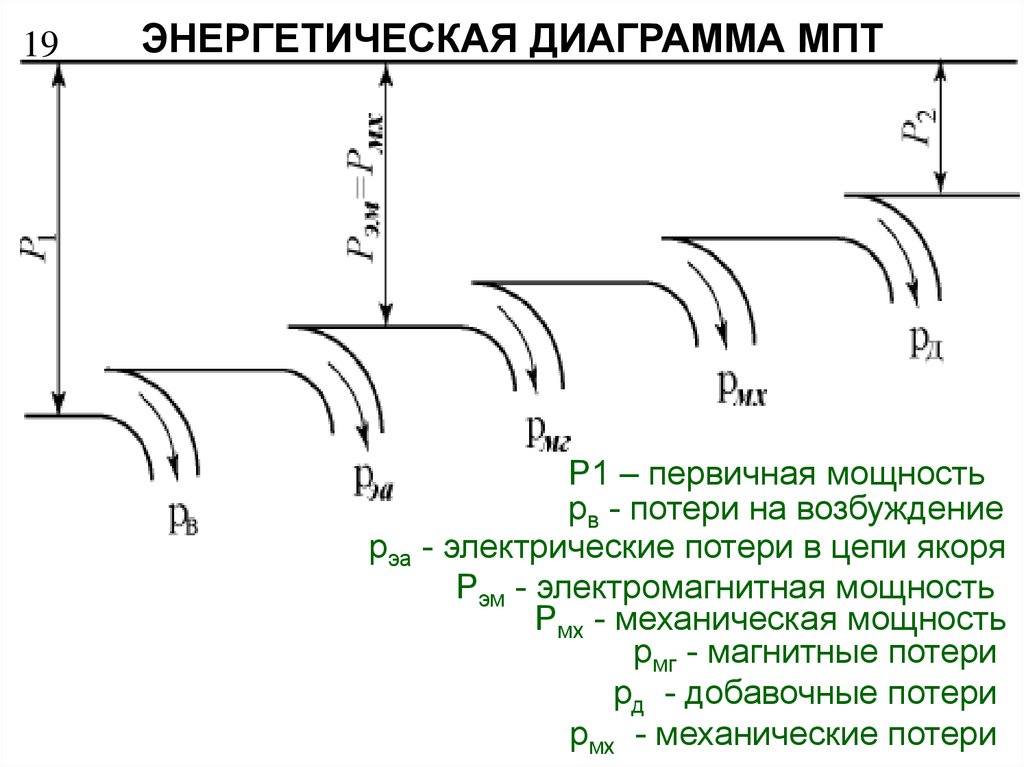 Если вы сможете представить «обмотки» ротора без многослойного стального сердечника, вы поймете, почему этот тип двигателя часто называют асинхронным двигателем с короткозамкнутым ротором. Рисунок 4 показывает это в упрощенной форме.
Если вы сможете представить «обмотки» ротора без многослойного стального сердечника, вы поймете, почему этот тип двигателя часто называют асинхронным двигателем с короткозамкнутым ротором. Рисунок 4 показывает это в упрощенной форме.
РИСУНОК 4. На этой схеме показана та же конфигурация обмотки, что и на Рисунке 2, но с установленным ротором. Вращающееся магнитное поле индуцирует ток в статоре за счет действия трансформатора. Этот ток создает собственное магнитное поле, которое взаимодействует с полем статора, создавая крутящий момент, ускоряющий ротор. По мере увеличения скорости ротора относительная скорость вращения вектора потока статора, видимая ротором, и, следовательно, крутящий момент уменьшаются. Статор переходит на стабильную скорость холостого хода, когда этот крутящий момент уравновешивается трением и аэродинамическим сопротивлением ротора.
Когда ротор неподвижен, токи, индуцируемые в стержнях ротора, могут быть очень большими, поскольку они эффективно закорачивают витки. В этот момент ток ротора будет соответствовать частоте сети. Токи ротора создают магнитное поле, которое взаимодействует с полем статора, поэтому создается крутящий момент, и статор начинает вращаться.
В этот момент ток ротора будет соответствовать частоте сети. Токи ротора создают магнитное поле, которое взаимодействует с полем статора, поэтому создается крутящий момент, и статор начинает вращаться.
По мере увеличения скорости ротора частота и амплитуда тока, индуцируемого в стержнях статора, уменьшаются. Это связано с тем, что скорость вращающегося потока, наблюдаемого ротором относительно статора, уменьшается по мере того, как ротор ускоряется до синхронной скорости.
Если бы ротор мог достичь синхронной скорости, то не было бы индуцированного тока ротора и крутящего момента, поскольку ротор воспринимал бы вектор потока статора как стационарный, а мы знаем, что индукция может возникать только при изменении магнитного поля.
Таким образом, асинхронный двигатель без нагрузки достигает скорости, чуть меньшей синхронной скорости, при которой уменьшающийся крутящий момент, создаваемый взаимодействием поля ротор-статор, уравновешивается крутящим моментом, необходимым для преодоления трения и сопротивления воздуха (сопротивление из воздуха в роторе).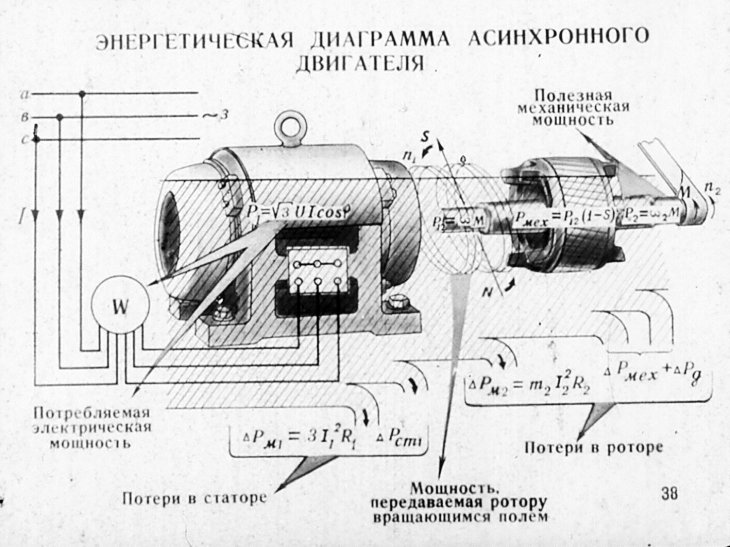 Разница между синхронной скоростью и скоростью вращения ротора называется скольжением, которое измеряется в процентах:
Разница между синхронной скоростью и скоростью вращения ротора называется скольжением, которое измеряется в процентах:
Типичное проскальзывание асинхронного двигателя без нагрузки составляет всего несколько процентов, поэтому скорость холостого хода типичного 4-полюсного двигателя при частоте 50 Гц может составлять около 1450 об/мин. Когда двигатель нагружен, скольжение увеличивается, и двигатель немного замедляется. Когда это происходит, ток, индуцируемый в роторе, увеличивается как по величине, так и по частоте, обеспечивая большую реакцию на вращающееся поле и больший крутящий момент. Зависимость между крутящим моментом и скоростью для типичного асинхронного двигателя показана на рис. 5.9 .0008
РИСУНОК 5. На этом графике красным цветом показана характеристика скорости вращения асинхронного двигателя. Крутящий момент равен нулю при синхронной скорости ns. Двигатель работает в точке холостого хода A, где скорость вращения ротора чуть ниже синхронной скорости. Когда двигатель нагружен, скольжение увеличивается, а скорость вращения ротора немного снижается.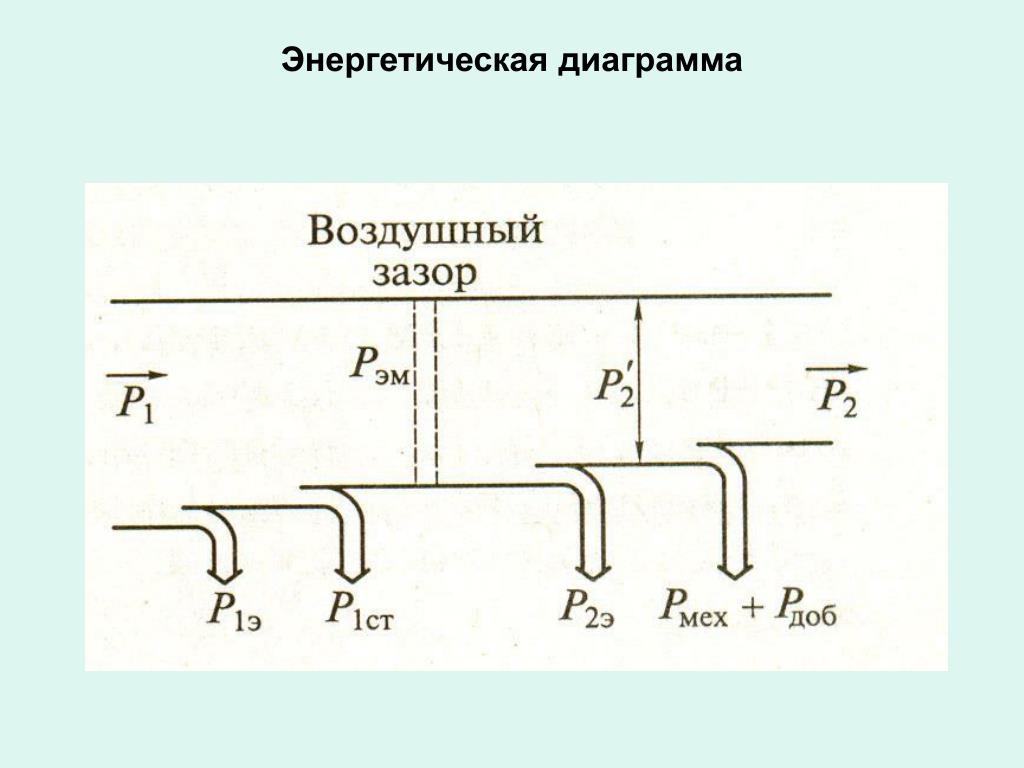 Установившийся режим работы достигается на пересечении кривых крутящего момента двигателя и нагрузки, как показано в точках B и C. Pont D — это «момент отрыва», когда двигатель не может обеспечить достаточный крутящий момент для привода нагрузки.
Установившийся режим работы достигается на пересечении кривых крутящего момента двигателя и нагрузки, как показано в точках B и C. Pont D — это «момент отрыва», когда двигатель не может обеспечить достаточный крутящий момент для привода нагрузки.
Красная линия представляет собой характеристику скорости вращения двигателя. Вы можете видеть, что при синхронной скорости n s крутящий момент равен нулю. Рабочий диапазон двигателя – это почти вертикальная область справа от кривой. Точка холостого хода обозначена точкой А – здесь скольжение мало, а скорость вращения близка к синхронной.
Для всех двигателей рабочей точкой будет точка пересечения характеристики скорости вращения двигателя и нагрузки. Две такие характеристики нагрузки показаны на графике: постоянный крутящий момент, такой как конвейерная нагрузка, показан зеленым цветом, и квадратичный, такой как вентилятор, синим цветом. Рабочие точки этих нагрузок обозначены буквами B и C соответственно. Момент отрыва (точка D) — это момент, при котором двигатель больше не может управлять нагрузкой и останавливается 9.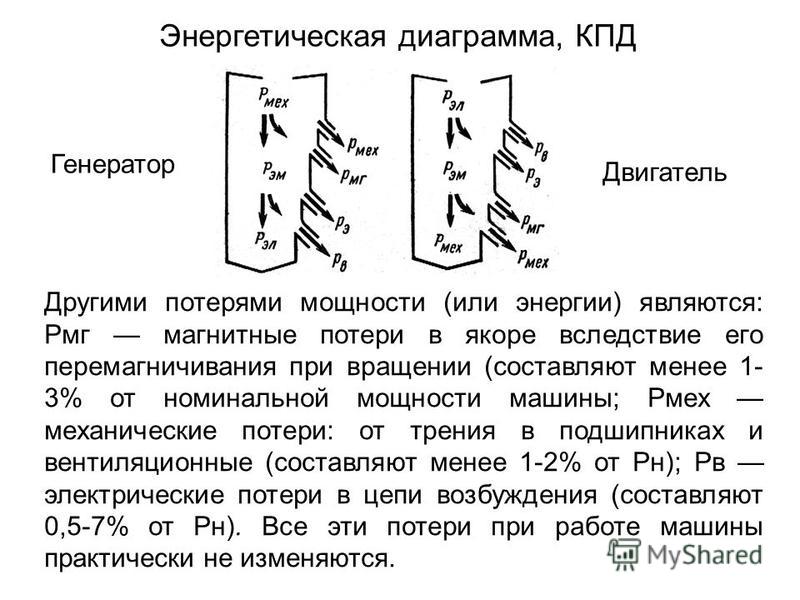 0003
0003
При полной нагрузке скольжение типичного двигателя находится в диапазоне от 5 до 10 %, поэтому регулирование скорости в диапазоне нагрузки будет аналогичным. Поэтому асинхронные двигатели не имеют идеального регулирования скорости, как синхронный двигатель, но более чем компенсируют этот недостаток с точки зрения простоты, стоимости и надежности.
— РЕКЛАМА—
—Реклама здесь—
Когда дело доходит до асинхронных двигателей, нужно изучить гораздо больше — например, мы не коснулись однофазных асинхронных двигателей и того, как мы можем контролировать и регулировать их скорость. моторы. Я мог бы затронуть эти темы в будущих статьях.
Артикул:
«Асинхронный двигатель». В Википедии, 6 октября 2021 г.
Не пропустите предстоящие выпуски Circuit Cellar.
Подписаться на журнал Circuit Cellar
Примечание. Мы сделали выпуск Circuit Cellar за май 2020 г. бесплатным образцом.