Содержание
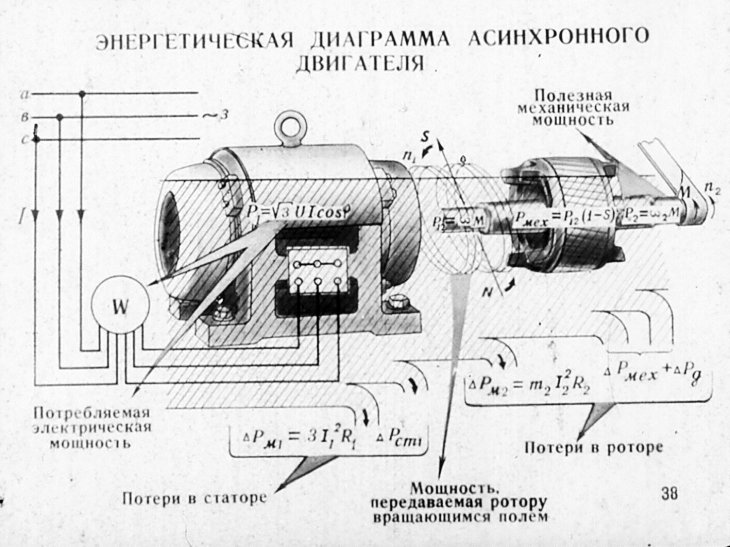
3) Энергетическая диаграмма асинхронного двигателя
За
время dt
электрическая
энергия P1dt,
потребляемая
асинхронным двигателем из сети,
преобразовывается в механическую P2dt.
При
работе машины неизбежно происходит
потеря преобразуемой ею энергии и,
следовательно, потребляемая двигателем
мощность Р1
будет
больше полезной Р2,
развиваемой
на валу двигателя.
Процесс
преобразования энергии и потери,
происходящие при работе двигателя,
можно иллюстрировать энергетической
диаграммой (рис. 22.1). Потребляемая
двигателем мощность из сети P1
= m1U1l1
cosφ1
частично расходуется на покрытие потерь
в обмотках статора Рm1
=т1I12r1
и
в стали сердечника статора Рс1
на
гистерезис и вихревые токи. Оставшаяся
Оставшаяся
часть мощности Pэм
= P1—Рm1—Рс1,
называемая
электромагнитной, передается ротору
через воздушный зазор вращающимся
магнитным полем. Энергия, полученная
ротором, преобразуется в механическую
и частично расходуется на покрытие
потерь в роторе. На диаграмме показано,
что электромагнитная мощность, поступающая
на ротор, может быть представлена в виде
суммы двух мощностей: Рэм=P’2
+Pm2
Так
как сердечник ротора при работе двигателя
перемагничивается с малой частотой
pns/6O=f2=Sf1
то
потери в стали ротора будут также малы
(на энергетической диаграмме они не
показаны).
Не
вся энергия, преобразованная машиной
в механическую (P’2dt)
является
полезной энергией P2dt,
так
как часть ее расходуется на покрытие
механических потерь Pмехdt
от
трения в подшипниках и о воздух
вращающихся частей машины.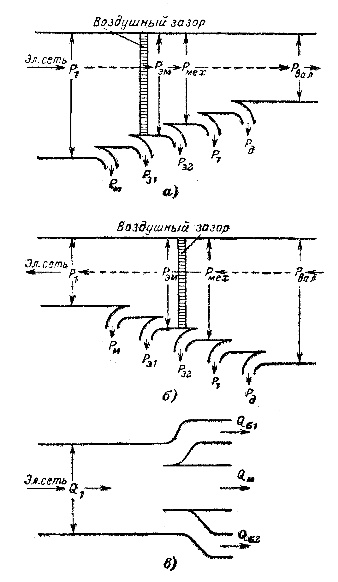 Таким образом,
Таким образом,
мощность, развиваемая вращающимся
ротором, P’2=P2+Pмех
энергетической диаграммы следует, что
Pэм—P’2=Pm2 ‘
(22.1)
Так
как мощность может быть представлена
произведением момента, развиваемого
машиной, на угловую частоту, то (22.1)
можно
придать следующий вид:
MΩ1—MΩ2=Pm2=m2I22r2,
(22.2)
где
М~
электромагнитный
момент, развиваемый машиной; Ω1,
Ω2—
угловые
частоты вращения поля статора И ротора;
т2—число
фаз ротора; I2—
ток в фазе обмотки вращающегося ротора;
r2
—
активное сопротивление фазы обмотки
ротора.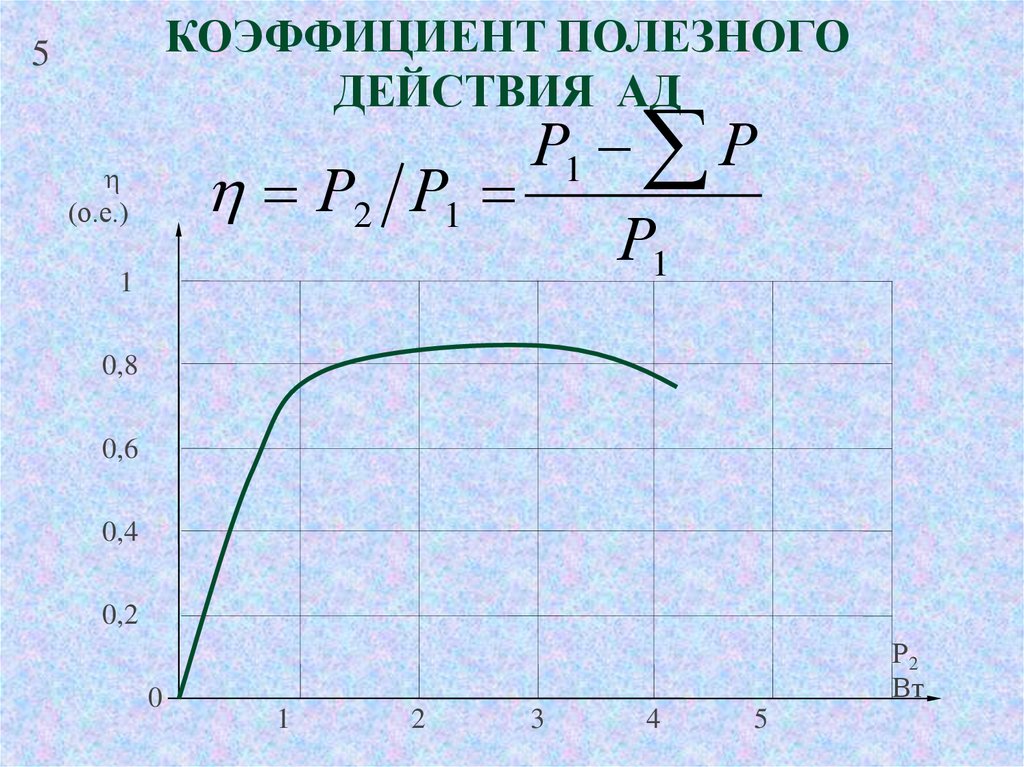
Выражение
(22.2) можно преобразовать к виду ,
MΩ1—MΩ2=
MΩ1(Ω1
— Ω2
)
/
Ω1=Pэм*Sоткуда
Pm2=SPэм
(22.3)
т.
е. потери в меди обмотки ротора определяются
произведением скольжения на электромагнитную
мощность. Из (22.3) получим
Pэм=Pm2/S=m1I22r2/S
(22. 4)
4)
или
после приведения параметров обмотки
ротора к цепи статора
Pэм=m1(I’2)2r’2/S
Максимального
значения КПД двигателя достигает при
нагрузке, близкой к номннальной. Двигатели
малой и средней мощности имеют номинальный
КПД
в
пределах 70…90%, двигатели большей мощности
имеют КПД
примерно
94…96%.
Билет
5.1. Способы
представления син. величин:
1)
изображение в прямоугольных координатах:
с помощью графического изображения в
прямоугольных координатах можно находить
опережающую и отстающую син. величины.
2)
векторное изображение син. ЭДС, напряжений,
токов: рис. 2.11
3)
в виде тригонометрических функций:
пример: u=Umsin(ωt+ψu).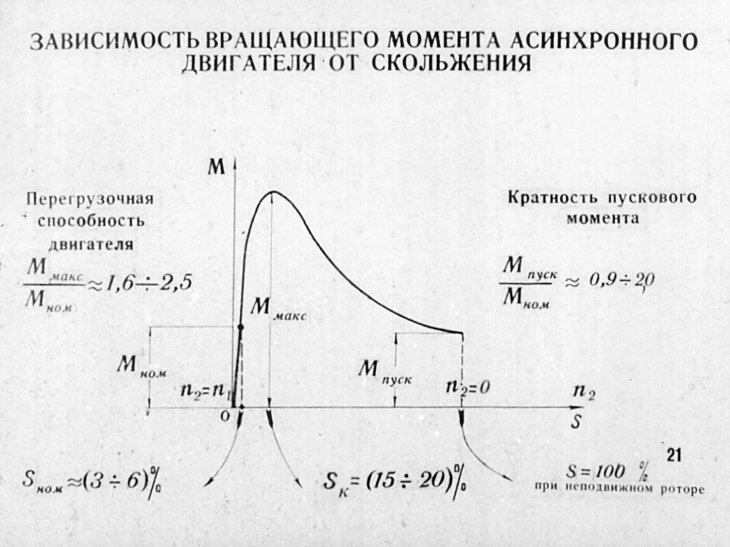
4)в
виде комплексных чисел.
З-ны
Кирхгофа в комплексной фазе:
1)Сумма
комплексных токов в узле равно нулю:
2)Сумма
комплексных ЭДС в контуре равна сумме
комплексных падений напряжения в этом
контуре:
.
З-н
Ома в комплексной форме:
и
,
где коэффициент
— комплексное электрическое сопротивление.
2.
Режимом
короткого замыкания трансформатора
называют
такой режим, когда выводы вторичной
обмотки замкнуты проводом с сопротивлением,
равным нулю (Zн
= 0).
Короткое замыкание трансформатора в
условиях эксплуатации создает
аварийный режим, так как вторичный
ток, а следовательно, и первичный
увеличиваются в несколько раз по
сравнению с номинальным. Поэтому в
цепях с трансформаторами предусматривают
защиту, которая при коротком замыкании
автоматически отключает трансформатор.
Опыт
короткого замыкания.
Этот опыт проводят для определения
параметров трансформатора. Собирают
электрическую цепь, соответствующую
схеме (рис.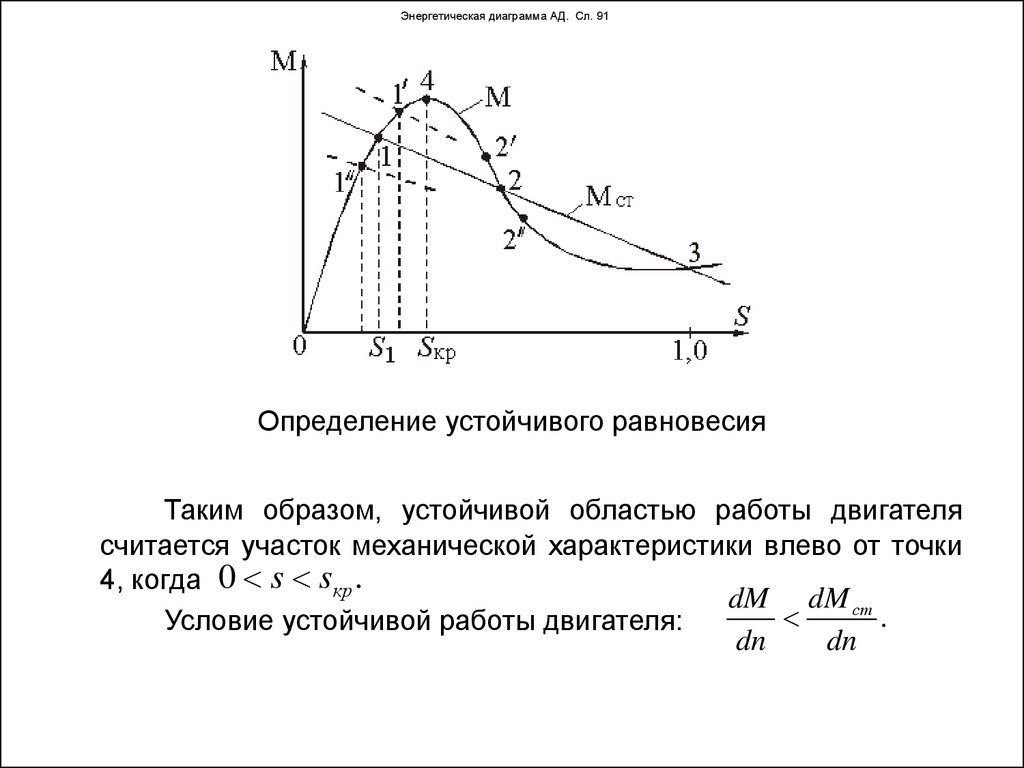 7.22), в которой вторичная
7.22), в которой вторичная
обмотка замкнута накоротко металлической
перемычкой или проводником с сопротивлением,
близким к нулю. К первичной обмотке
подводят такое напряжение, при котором
ток в ней равен номинальному значению
I1ном.Измеряют
напряжение Uк,
ток I1ном
и
активную мощность Рк
потребляемой энергии.
В режиме короткого замыкания Uк
очень мало, поэтому потери мощности
в магнитопроводе Рп0
~ U12
в
сотни раз меньше, чем при номинальном
напряжении. Таким образом, можно считать,
что Рп0
= 0, и измеряемая ваттметром мощность
Рпк
— это мощность потерь энергии,
затрачиваемой на нагрев обмоток
трансформатора. Поэтому можно считать,
что мощность Рпк
соответствует электрическим потерям
в обмотках трансформатора. Ее называют
электрическими
потерями или
потерями
короткого замыкания.
По
данным измерений определяют следующие
три параметра трансформатора:
1)
напряжение короткого замыкания ик
=
(Uк/U1ном)*100%;
2)
мощность потерь короткого замыкания
Рпк
при I1=I1ном;
3)
полное, активное и индуктивное
сопротивления трансформатора: Zk=Uk/I1ном;
Rk=Pпк/I21ном;
Xk=
.
Зная сопротивления
Zk,
Rk
и Хк
трансформатора,
можно построить треугольник
напряжений короткого замыкания
(треугольник
ОАВ
на
рис. 7.21), а также определить активную
и индуктивную составляющие напряжения
короткого замыкания: Uка=Uкcosφк
; Uкр=Uкsinφк
.
Энергетическая диаграмма асинхронного двигателя | Электрические машины
- Подробности
- Категория: Оборудование
- электродвигатель
Содержание материала
- Электрические машины
- Основные электромагнитные схемы электрических машин
- Устройство многофазных обмоток
- Магнитное поле и МДС многофазных обмоток
- Электродвижущие силы, индуктируемые в обмотке
- Асинхронные машины
- Явления в асинхронной машине при неподвижном роторе
- Явления в асинхронной машине при вращающемся роторе
- Уравнения, схема замещения и векторная диаграмма
- Энергетическая диаграмма асинхронного двигателя
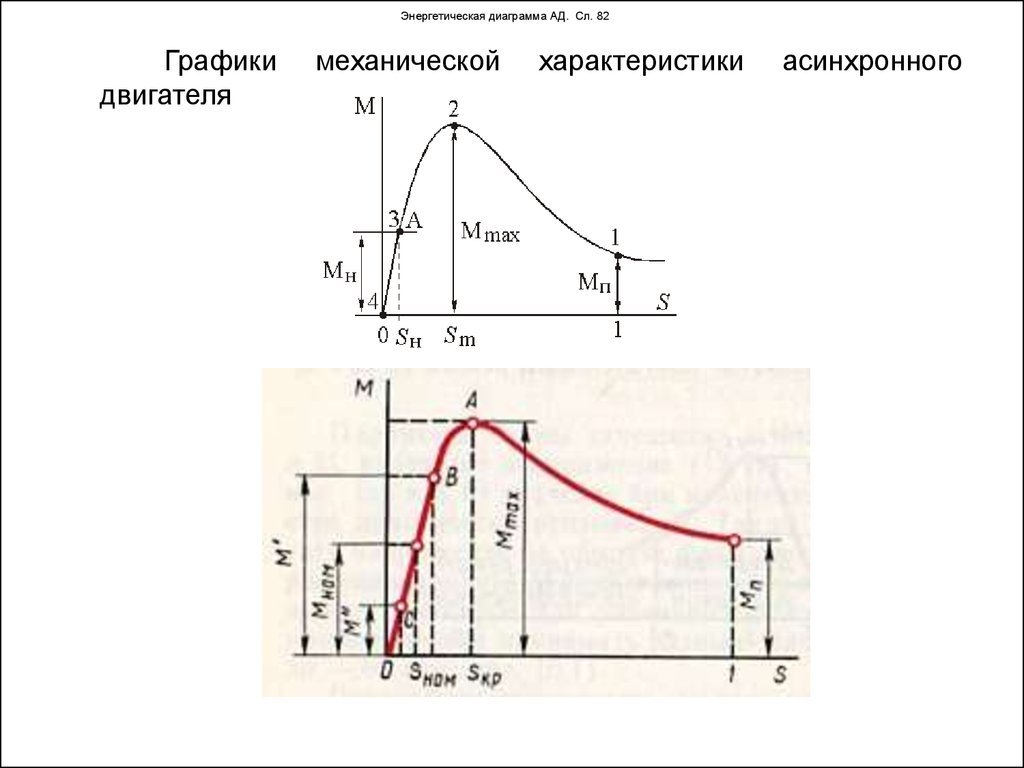
- Механическая характеристика асинхронной машины
- Статическая устойчивость асинхронной машины
- Экспериментальное исследование асинхронных двигателей
- Рабочие характеристики асинхронного двигателя
- Двигатели с улучшенными пусковыми свойствами
- Пуск асинхронных двигателей
- Регулирование частоты вращения асинхронных двигателей
- Несимметричные режимы работы асинхронных двигателей
- Однофазные асинхронные двигатели
- Генераторный режим асинхронной машины
- Трансформаторный режим асинхронной машины
- Синхронные машины
- Магнитное поле синхронной машины при холостом ходе
- Расчет магнитной цепи синхронной машины при хх
- Магнитное поле синхронной машины при нагрузке
- Приведение МДС обмотки статора к МДС возбуждения
- Уравнения напряжений и векторные диаграммы
- Уравнения векторные диаграммы с учетом насыщения
- Работа на автономную нагрузку
- Параллельная работа синхронных машин
- Включение генератора в сеть
- Регулирование активной мощности синхронной машины
- Регулирование реактивной мощности синхронной машины
- Угловая характеристика синхронной машины
- Статическая устойчивость синхронной машины
- U-образные характеристики
- Синхронные двигатели
- Синхронные компенсаторы
- Несимметричные режимы синхронных генераторов
- Внезапное трехфазное кз синхронного генератора
- Качания и динамическая устойчивость синхронной машины
- Машины постоянного тока
- ЭДС обмотки якоря и электромагнитный момент
- Магнитное поле машины постоянного тока при нагрузке
- Коммутация
- Генераторы постоянного тока
- Характеристики генераторов с самовозбуждением
- Параллельная работа генераторов постоянного тока
- Двигатели постоянного тока
- Характеристики двигателя постоянного тока
- Регулирование частоты вращения
Страница 10 из 51
Энергетическая диаграмма позволяет судить о характере распределения мощности, потребляемой двигателем из сети.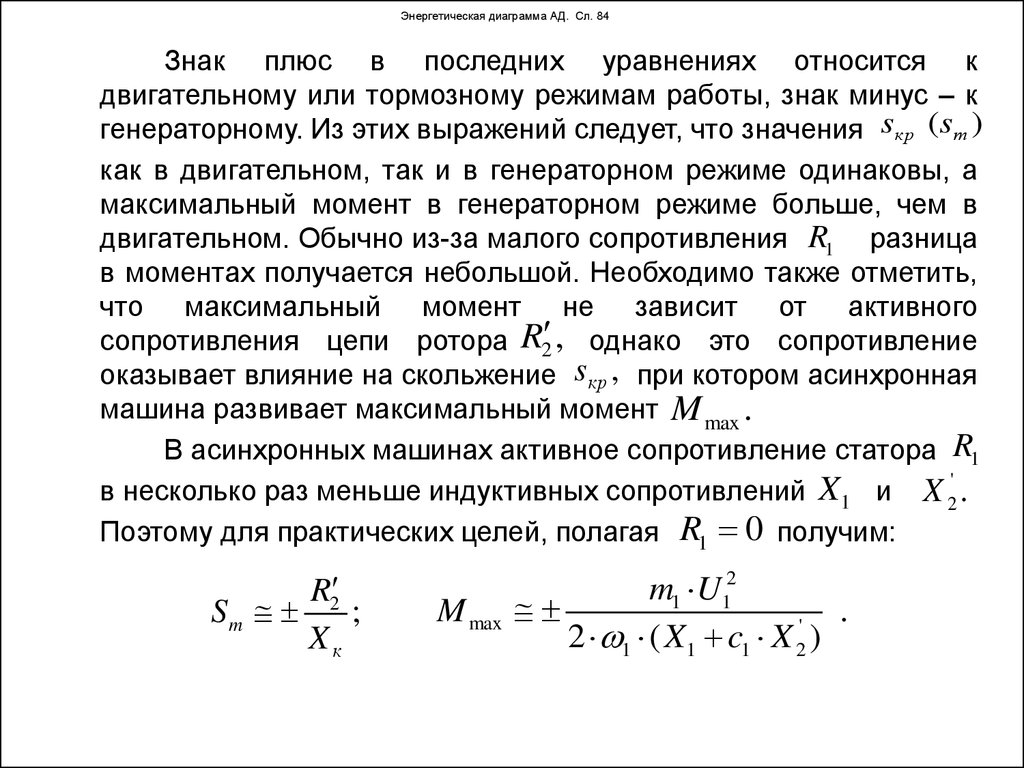 Ее можно получить с помощью векторной диаграммы (рис.4.9). При работе асинхронный двигатель потребляет из сети активную мощность
Ее можно получить с помощью векторной диаграммы (рис.4.9). При работе асинхронный двигатель потребляет из сети активную мощность
.
Из векторной диаграммы можно получить следующие соотношения:
С учетом этих соотношений выражение для мощности преобразуется к виду
.
Отсюда следует, что мощность расходуется в статоре на покрытие электрических потерь в обмотке статора,
и на покрытие потерь в стали,
.
Остальная мощность поступает через воздушный зазор в ротор. Эта мощность определяет электромагнитный момент двигателя, поэтому ее называют электромагнитной мощностью
.
Из векторной диаграммы можно получить следующее соотношение:
,
поэтому для электромагнитной мощности справедливо второе выражение:
.
Часть электромагнитной мощности, как мы выяснили выше, теряется в виде электрических потерь в обмотке ротора,
,
а остальная часть мощности преобразуется в механическую мощность
.
Часть механической мощности теряется внутри самой машины в виде механических потерь , магнитных потерь и добавочных потерь . Механические потери включают потери на трение и на вентиляцию. Их расчет выполняется по эмпирическим формулам. Магнитные потери обычно малы и отдельно не определяются , а учитываются в вместе с потерями в стали статора. Добавочные потери вызваны в основном высшими гармониками магнитных полей. Они трудно поддаются расчету. Поэтому добавочные потери оценивают приближенно величиной 0,5% от номинальной мощности двигателя.
Полезная мощность на валу двигателя
.
В соответствии с изложенным энергетическую диаграмму двигателя можно представить в виде, показанном на рис. 4.10. Сумма потерь определяет КПД двигателя
.
КПД двигателей мощностью от 1 кВт до 1000 кВт лежит в пределах .
- Назад
- Вперёд
- Назад
 org/BreadcrumbList»>
org/BreadcrumbList»>Еще по теме:
- Испытания по определению электрических величин электрических машин
- Основные повреждения электродвигателей
- Двигатели типа ДАБ
- Методы сушки электрических машин
- Автоматизация испытаний электрических машин
Эффективность и блок-схема мощности асинхронного двигателя
Ступени передачи мощности асинхронного двигателя:
Асинхронный двигатель преобразует подаваемую к нему электрическую энергию в механическую.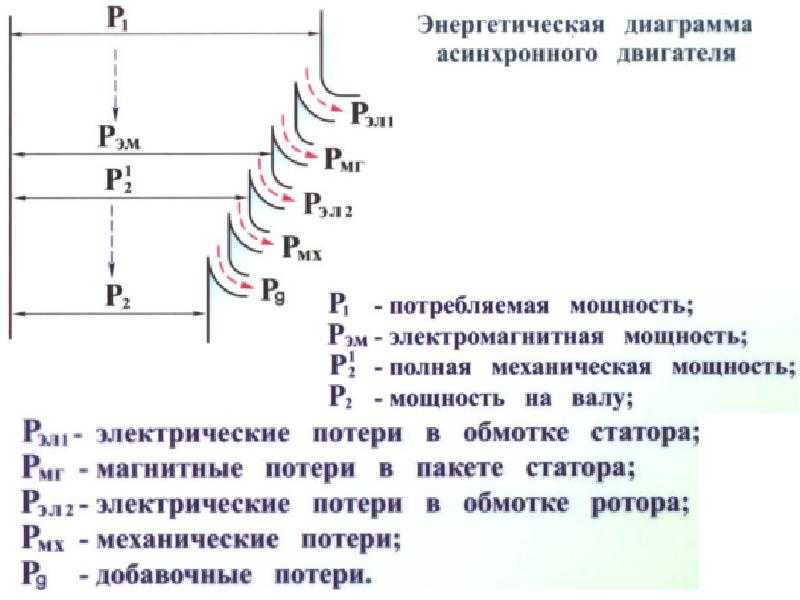 Различные этапы этого преобразования называются этапами передачи мощности в асинхронном двигателе. 3-фазная мощность, подводимая к асинхронному двигателю, т. е. вход статора, равна
Различные этапы этого преобразования называются этапами передачи мощности в асинхронном двигателе. 3-фазная мощность, подводимая к асинхронному двигателю, т. е. вход статора, равна
P in = √3 В L I L Cos Φ
Где V L и I L — линейные значения напряжения и тока питания статора, а Cos Φ — коэффициент мощности двигателя. Часть этой мощности расходуется на потери в стали и меди статора. Остальная мощность индуктивно передается на ротор через воздушный зазор. Это называется входом ротора P 2 . Следовательно,
P 2 = P в — потери в стали и меди в статоре
Потери в роторе состоят из большей части потерь в меди и очень малых потерь в стали в роторе, которыми обычно пренебрегают. Вычитая потери в меди ротора из P 2 , получим полную механическую мощность, развиваемую двигателем P м .
P м = P 2 — потери в меди ротора
Часть P м расходуется на механические потери, а оставшаяся часть представляет собой мощность, доступную для нагрузки на валу.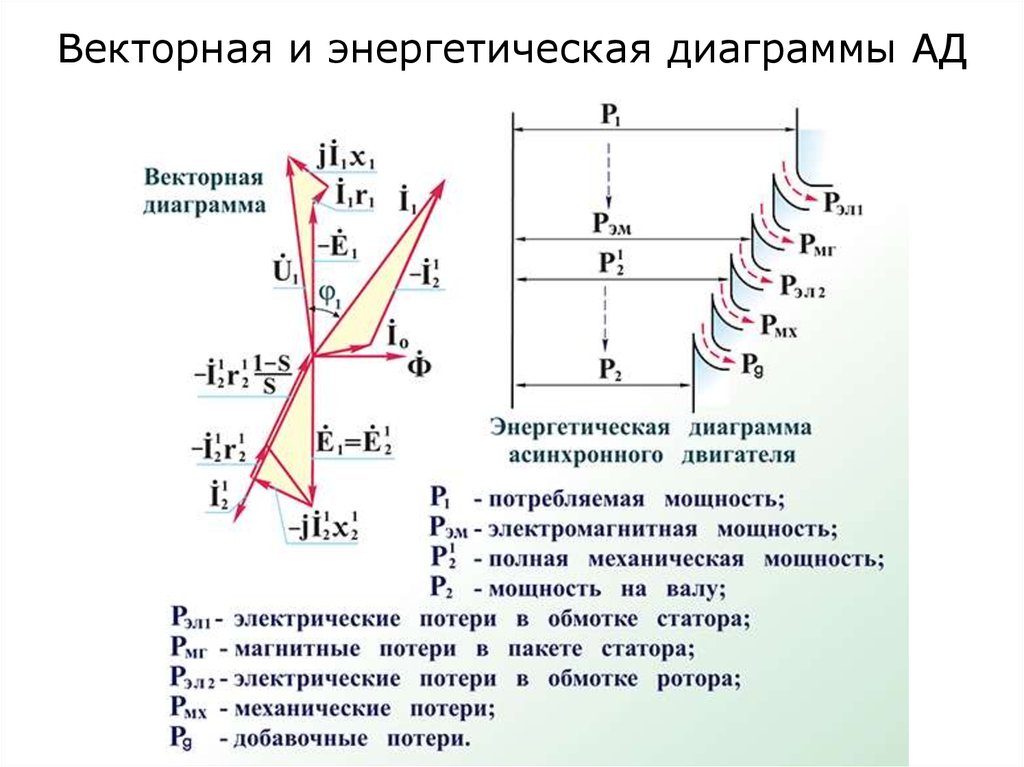 Это называется чистой выходной мощностью двигателя P из . Вышеупомянутые этапы могут быть показаны схематически, называемой диаграммой потока мощности асинхронного двигателя.
Это называется чистой выходной мощностью двигателя P из . Вышеупомянутые этапы могут быть показаны схематически, называемой диаграммой потока мощности асинхронного двигателя.
Соотношение между входом ротора, потерями в меди ротора и выходом ротора:
Let,
- P 2 = Потребляемая мощность ротора
- P c = Потери в меди ротора в Н-м.
Фактический крутящий момент, доступный на валу, называется крутящим моментом вала или полезным крутящим моментом T sh ,
- T sh = Полный крутящий момент
- T g = Крутящий момент, потерянный из-за потерь на трение и сопротивление воздуха.
Теперь ввод в ротор осуществляется через воздушный зазор с помощью вращающегося магнитного поля, которое вращается со скоростью N с об/мин. Входная мощность ротора может быть выражена через полный крутящий момент T г и скорость как
. Теперь развиваемый крутящий момент остается тем же, но выходная мощность ротора, представляющая собой развиваемую полную механическую мощность P м , находится на скорости ‘N’ об/мин. . Таким образом, со стороны выхода мы можем написать
. Таким образом, со стороны выхода мы можем написать
Мы знаем, что потери в меди ротора,
Разделив уравнение 3 на 1, получим,
Таким образом, потери в меди ротора равны времени проскальзывания входа ротора. Теперь общая механическая мощность развилась,
Таким образом, развиваемая полная механическая мощность в (1 — s) раз превышает входную мощность ротора. Разделив уравнение 4 на 5, получим,
Из вышеизложенного можно сделать вывод, что
Как работает автомобильный двигатель
Включите JavaScript
Как работает автомобильный двигатель
Полный крутящий момент и крутящий момент на валу:
Крутящий момент, создаваемый ротором, представляет собой валовой механический крутящий момент, и из-за механических потерь он не может полностью использоваться для привода нагрузки . Крутящий момент нагрузки представляет собой чистый выходной крутящий момент, называемый крутящим моментом на валу или полезным крутящим моментом.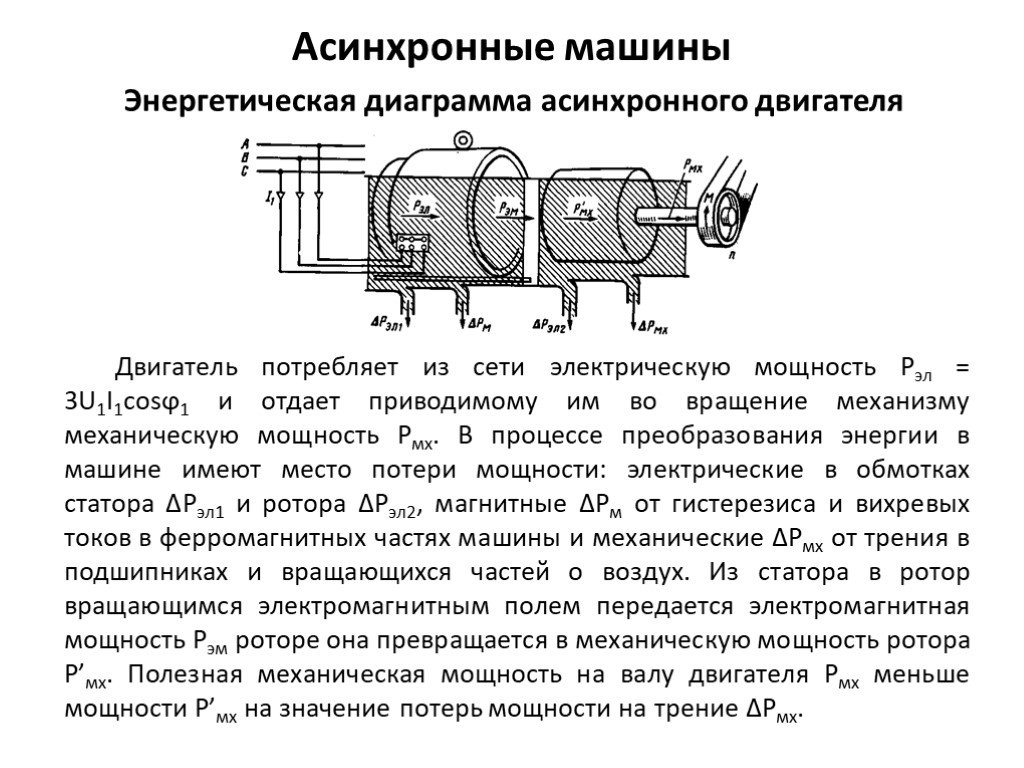 Следовательно, крутящий момент на валу задается как
Следовательно, крутящий момент на валу задается как
Полный крутящий момент задается как
где
- T потерянный = Потеря крутящего момента из-за механических потерь
- P вых = мощность двигателя
- P м = развиваемая механическая мощность
- N = скорость двигателя.
КПД асинхронного двигателя:
Отношение полезной мощности, доступной на валу (P из ) и полезной потребляемой электрической мощности (P из ) к двигателю называется общим КПД асинхронного двигателя. Мотор.
Максимальная эффективность достигается, когда переменные потери становятся равными постоянным потерям.
Кривая нормального КПД двигателя показана выше. Следовательно, КПД ротора определяется выражением
Пояснение эквивалентной электрической схемы асинхронного двигателя
Асинхронные двигатели
mplgmg
Без сомнения, асинхронные двигатели являются наиболее используемым типом двигателей в электротехнической промышленности. Мы уже обсуждали некоторые сведения об этих асинхронных двигателях в наших предыдущих статьях. Сегодня мы собираемся обсудить эквивалентную схему асинхронного двигателя, которая является одной из важных функций для анализа производительности двигателя.
эквивалентная схема асинхронного двигателя
Если мы рассматриваем решение проблем или поиск необходимых параметров, очень важно проанализировать эту эквивалентную схему асинхронного двигателя. Левая сторона рассматривается как сторона статора, а правая сторона Сторона считается стороной ротора асинхронного двигателя.
Пофазная эквивалентная схема приведена для фазной обмотки. затем обмотка служит либо для соединения звездой, либо для соединения треугольником в зависимости от идентичности эквивалентной цепи напряжения и тока для каждой фазы.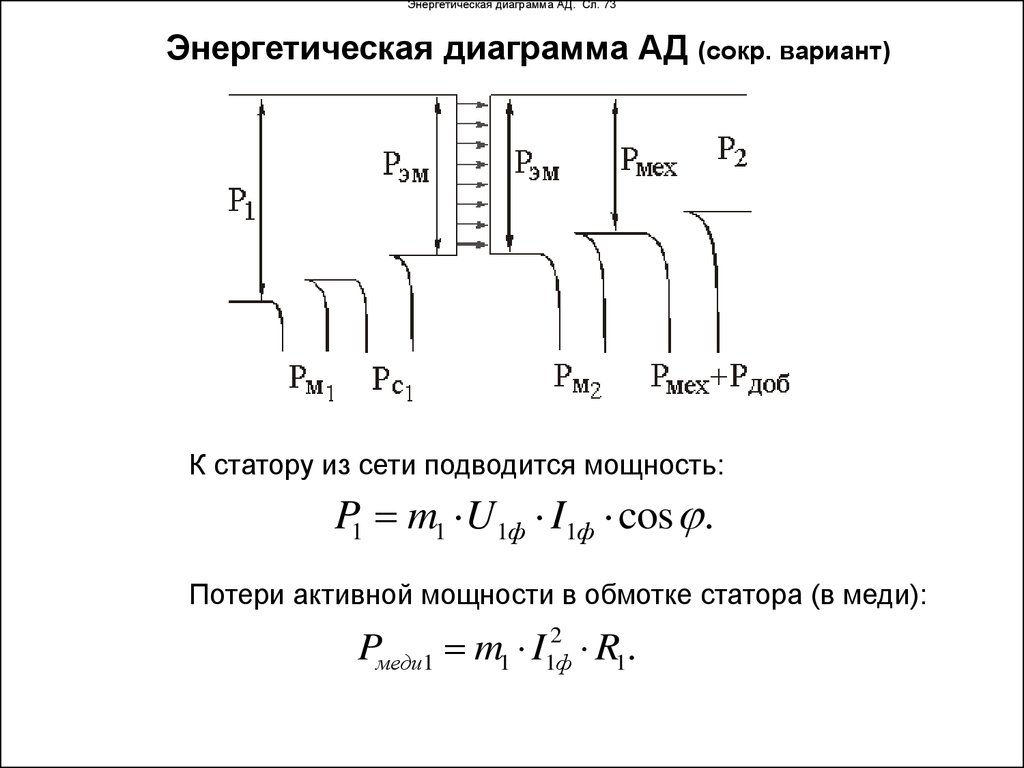
R1 — Сопротивление статора на фазу
R2 — Сопротивление ротора на фазу
RC — Сопротивление потери ядра на фазу
XM — Mignetizing Reactance Per Fase
XM — увеличивающаяся на фаза
9000 2 xm — увеличиваемость на фазу
9000 2 xm — увеличение масштабирования на фазу
9000 2 XM. фаза
X2 – реактивное сопротивление рассеяния ротора по фазам
Vs – напряжение статора или напряжение питания по фазам
Is – ток статора или ток питания по фазам
I0 — отсутствие тока нагрузки на фазу
I1 — Компонент, создающий крутящий момент тока статора на фазу
I2 — ток ротора на фазу
E165 9055
EMF STATAT E2 – ЭДС ротора в состоянии покоя
n1: n2 – Эффективное соотношение оборотов статора и ротора
с – Скольжение
Упрощенный эквивалентный параметр
Упомянутая эквивалентная схема асинхронного двигателя также может быть упрощена до нескольких форм.