Содержание
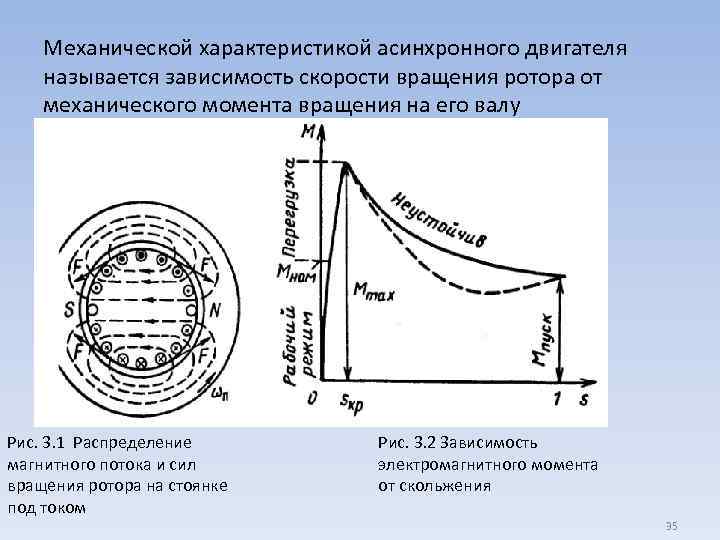
Электромагнитный момент и механические характеристики асинхронного двигателя
Областное государственное бюджетное профессиональное образовательное учреждение «Томский политехнический техникум» (ОГБПОУ «ТПТ») Электромагнитный момент и механические характеристики асинхронного двигателя
Томск 2019
Асинхронные электродвигатели
- Асинхронные машины получили наиболее широкое применение в современных электрических установках и являются самым распространенным видом бесколлекторных электрических машин переменного тока. Как и любая электрическая машина, асинхронная машина обратима и может работать как в генераторном, так и двигательном режимах. Однако преобладающее применение имеют асинхронные двигатели, составляющие основу современного электропривода.
Электромагнитная схема асинхронного электродвигателя
Асинхронные электродвигатели предназначены для преобразования электрической энергии переменного тока в механическую энергию.
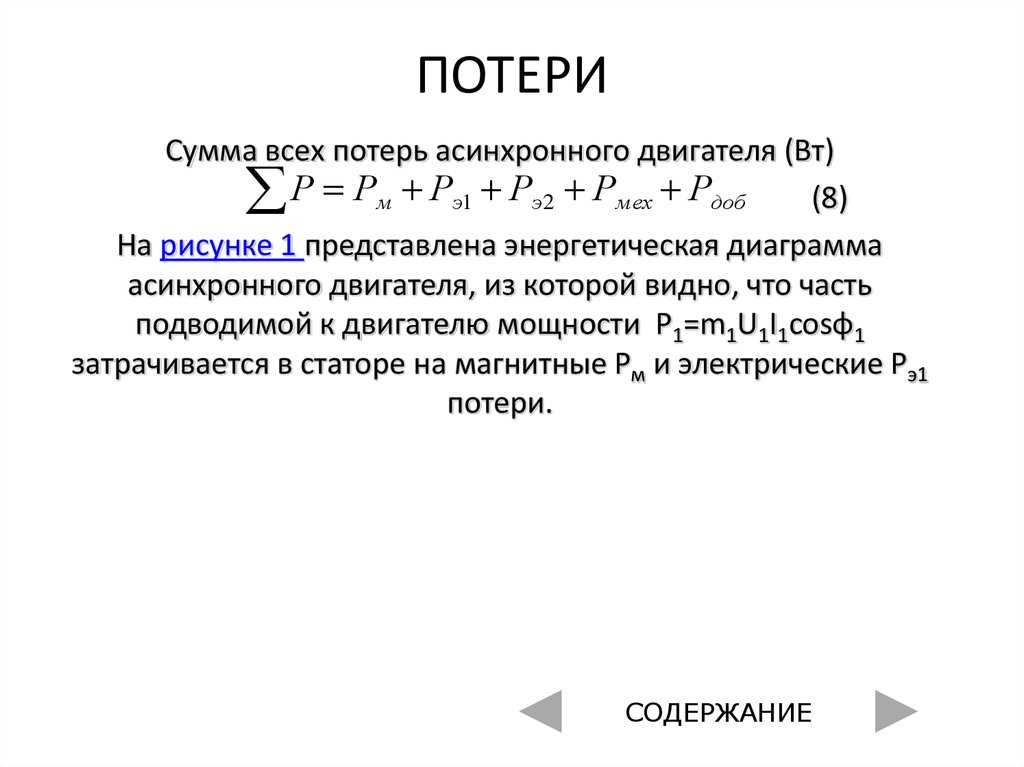
Энергетическая диаграмма асинхронного двигателя
Понятие электромагнитной мощности АД
Из энергетической диаграммы следует, что электромагнитная мощность асинхронного двигателя:
Р эм =Р 1 -(Р м1 +Р э1 )
Электрические потери в роторе прямо пропорциональны скольжению:
Р э2 = s Р эм
Электрические потери в обмотке ротора:
Р э2 = m 2 I 2 2 r 2 = m 1 I ‘2 2 r ′ 2 .
Принцип образования электромагнитного момента асинхронного двигателя
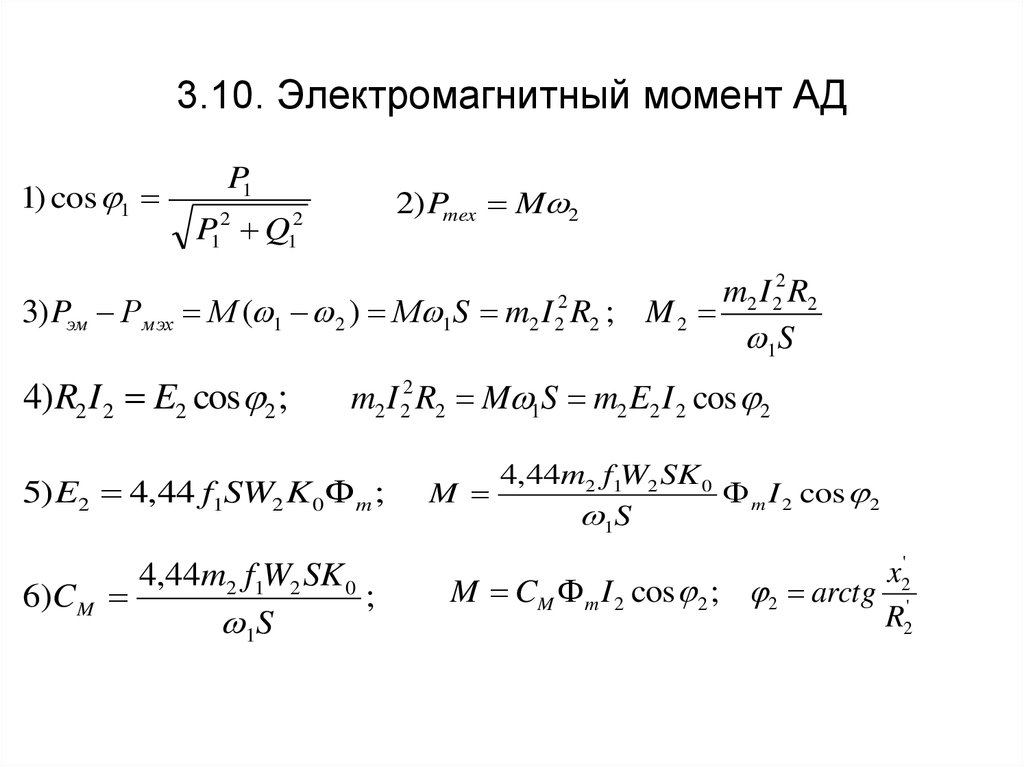
Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем статора.
Электромагнитный момент М пропорционален электромагнитной мощности, Н ∙м :
М = Р эм / ω 1 (7)
где ω 1 = 2 π n 1 /60 = 2 π f 1 / р — угловая синхронная скорость вращения, рад/с
Подставив в значение электромагнитной мощности из формулы Р Э2 = s Р ЭМ , получим:
М = Р Э2 / (ω 1 s) = m 1 I ′ 2 2 r′ 2 /(ω 1 s) (8 )
т.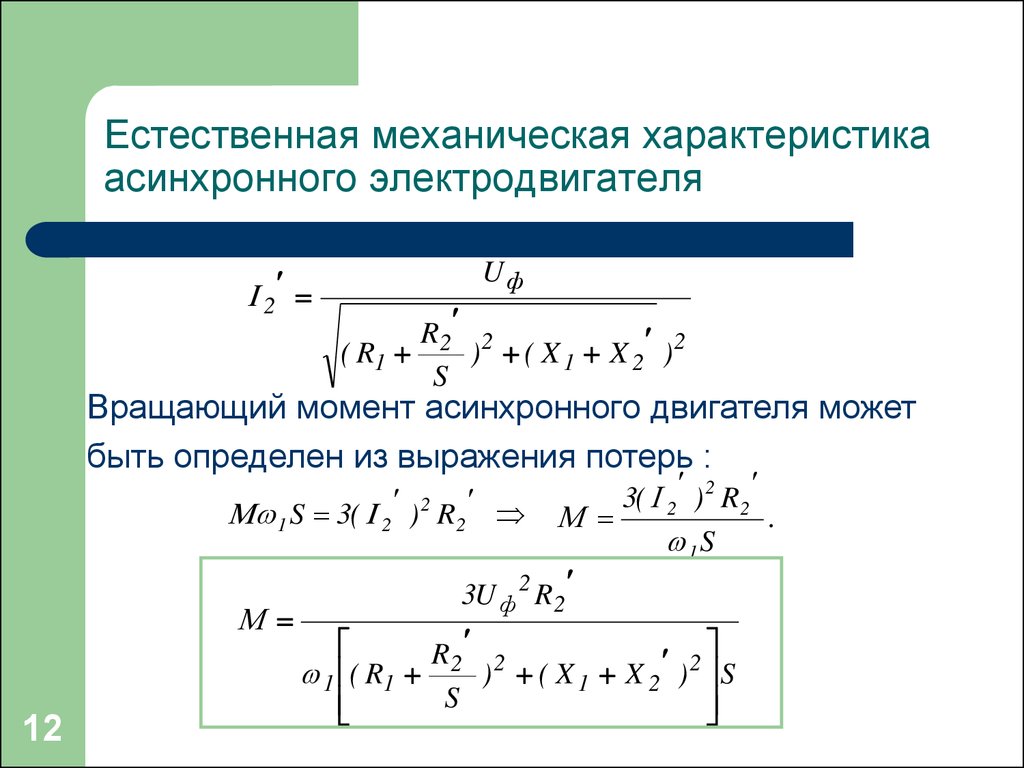 е. электромагнитный момент асинхронного двигателя пропорционален мощности электрических потерь в обмотке ротора.
е. электромагнитный момент асинхронного двигателя пропорционален мощности электрических потерь в обмотке ротора.
Значение тока ротора : I ′ 2 = U 1 /
Значение электромагнитного момента асинхронного двигателя
Если значение тока ротора по подставить в (8), то получим формулу электромагнитного момента асинхронной машины, (Н ∙ м):
М = (9)
Параметры схемы замещения асинхронной машины r 1 , r’ 2 , х 1 и х’ 2 являются постоянными, так как их значения при изменениях нагрузки машины остается практически неизменными. Также постоянными можно считать напряжение на обмотке фазы статора U 1 и частоту f 1 . В выражении момента M единственная переменная величина — скольжение s, которое для различных режимов работы асинхронной машины может принимать разные значения в диапазоне от + ∞ до — ∞ .
Механическая характеристика асинхронной машины
Зависимость момента от скольжения M = f ( s ) при U 1 = const , f 1 = const и постоянных параметрах схемы замещения называется механической характеристикой асинхронной машины.
Анализ выражения (9), представляющего собой аналитическое выражение механической характеристики M = f ( s ), показывает, что при значениях скольжения s = 0 и s = ∞ электромагнитный момент М = 0. Из этого следует, что механическая характеристика M = f ( s ) имеет максимум.
Механическая характеристика асинхронной машины
Анализ механической характеристики асинхронной машины
- Для определения величины критического скольжения s кр , соответствующего максимальному моменту, необходимо взять первую производную от (9) и приравнять ее нулю: dM / ds = 0.
- В результате:
s кр = ± r / 2 / (10)
- Подставив значение критического скольжения по формуле (10) в выражение электромагнитного момента (9), после ряда преобразований получим выражение максимального момента, (Н ∙ м):
M max = ± (11)
В выражениях (10) и (11) знак плюс соответствует двигательному, а знак минус — генераторному режиму работы асинхронной машины.
Упрощенные формулы для критического скольжения и максимального момента
- Для асинхронных машин общего назначения активное сопротивление обмотки статора r 1 намного меньше суммы индуктивных сопротивлений: r 1
s кр ≈ ± r / 2 /(x 1 +x / 2 ) (1 2 )
M max = ± (13)
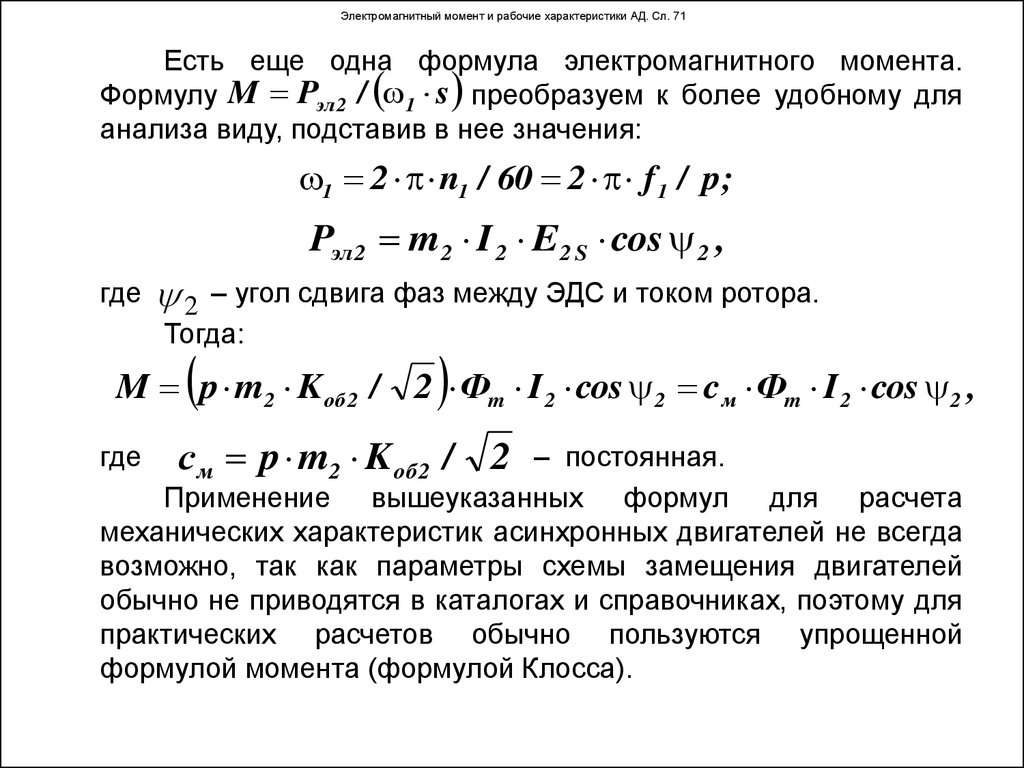
Упрощенная формула электромагнитного момента или формула Клосса
Применение формулы изученной формулы момента для расчета механических характеристик асинхронных двигателей не всегда возможно, так как параметры схемы замещения двигателей обычно не приводятся в каталогах и справочниках, поэтому для практических расчетов обычно пользуются упрощенной формулой момента. В основу этой формулы положено допущение, что активное сопротивление обмотки статора асинхронного двигателя r 1 = 0, при этом:
M = M max (14)
Критическое скольжение определяют по формуле:
s кр = s ном ( λ + ) (15)
Формула Клосса
- Расчет механической характеристики намного упрощается, если его вести в относительных единицах M = M / M max .
 В этом случае уравнение механической характеристики имеет вид:
В этом случае уравнение механической характеристики имеет вид:
 В этом случае уравнение механической характеристики имеет вид:
В этом случае уравнение механической характеристики имеет вид:M = (16)
- Применение упрощенной формулы для расчета электромагнитного расчета наиболее целесообразно при расчете рабочего участка механической характеристики и при скольжениях s s кр ошибка может достигать 15—17%.
Анализ механической характеристики асинхронной машины
Из формулы (9) следует, что электромагнитный момент асинхронного двигателя пропорционален квадрату напряжения сети:
M ≡ U 1 2 .
Это в значительной степени отражается на эксплуатационных свойствах двигателя: даже небольшое снижение напряжения сети вызывает заметное уменьшение вращающего момента асинхронного двигателя .
Например, при уменьшении напряжения на 10% относительно номинального ( U 1 = 0,9 U ном) электромагнитный момент двигателя уменьшается на 19% : M / =0,9 2 M ,
где М— момент при номинальном напряжении сети, М / — момент при пониженном напряжении.
Пусковой момент асинхронного двигателя
Подставив в выражение электромагнитного момента (9) скольжение s = 1, получим выражение пускового момента асинхронного двигателя, Н ∙м:
Мп =
где U 1 — фазное значение напряжения, В;
m 1- число фаз;
р- число пар полюсов обмотки статора;
f- частота тока в обмотке статора ,Гц
Механическая характеристика асинхронного двигателя
Анализ механической характеристики асинхронного двигателя
- Под действием пускового момента начинается вращение ротора двигателя, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой М = f ( s ).
- При критическом скольжении s кр момент достигает максимального значения М m ах .
- С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент М начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х. х. M 0 и полезного нагрузочного момента (момента на валу двигателя) М 2 , :
 х. M 0 и полезного нагрузочного момента (момента на валу двигателя) М 2 , :
х. M 0 и полезного нагрузочного момента (момента на валу двигателя) М 2 , :М = М 0 + M 2 = M ст (12)
Статический момент М ст равен сумме противодействующих моментов при равномерном вращении ротора ( n 2 = const ). Если противодействующий момент на валу двигателя М 2 соответствует номинальной нагрузке двигателя, то установившийся режим работы двигателя определится точкой на механической характеристике с координатами М = М ном и s = s ном , где М ном и s ном — номинальные значения электромагнитного момента и скольжения.
Условие устойчивой работы асинхронного двигателя
- Из анализа механической характеристики также следует, что устойчивая работа асинхронного двигателя возможна при скольжениях меньше критического ( s
- Работа асинхронного двигателя становится неустойчивой при скольжениях s ≥ s кр. Так, если электромагнитный момент двигателя М = М m ах, а скольжение s = s к p , то даже незначительное увеличение нагрузочного момента М 2 , вызвав увеличение скольжения s , приведет к уменьшению электромагнитного момента М. За этим следует дальнейшее увеличение скольжения и т. д., пока скольжение не достигнет значения s = 1, т. е. пока ротор двигателя не остановится.
- Таким образом, при достижении электромагнитным моментом максимального значения наступает предел устойчивой работы асинхронного двигателя. Следовательно, для устойчивой работы двигателя необходимо, чтобы сумма нагрузочных моментов действующих на ротор, была меньше максимального момента:
 За этим следует дальнейшее увеличение скольжения и т. д., пока скольжение не достигнет значения s = 1, т. е. пока ротор двигателя не остановится.
За этим следует дальнейшее увеличение скольжения и т. д., пока скольжение не достигнет значения s = 1, т. е. пока ротор двигателя не остановится.Мст = (М 0 + М 2 )
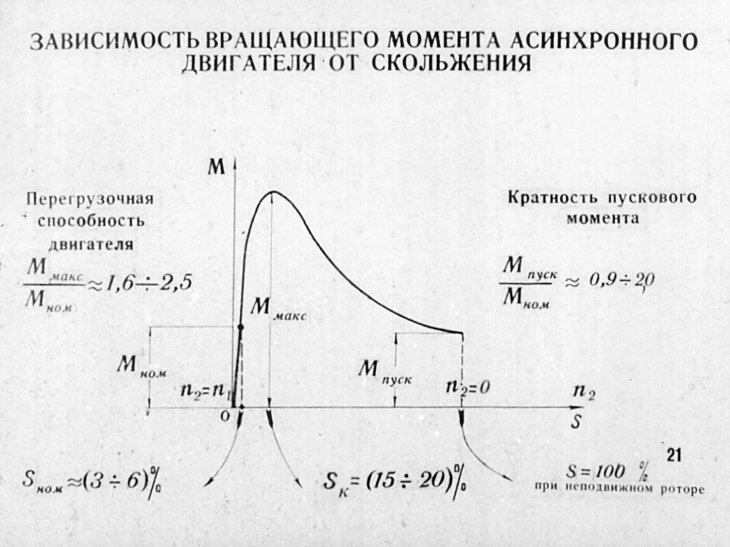
- Для надежной работы асинхронного двигателя и чтобы случайные кратковременные нагрузки не вызывали остановок двигателя, необходимо, чтобы он обладал перегрузочной способностью.
Перегрузочная способность АД
Перегрузочная способность двигателя λ определяется отношением максимального момента М max к номинальному Мном. Для асинхронных двигателей общего назначения перегрузочная способность составляет
λ = Mmax / M ном = 1,7 ÷ 2,5.
- Следует также обратить внимание на то, что работа двигателя при скольжении s
Механические характеристики асинхронного двигателя при изменениях напряжения сети
Механические характеристики асинхронного двигателя при изменениях активного сопротивления обмотки ротора
Механические характеристики асинхронного двигателя при изменениях активного сопротивления обмотки ротора
- Значение максимального момента двигателя не зависит от активного сопротивления ротора r / 2 , а критическое скольжение s кр , то, как это видно из (10) пропорционально сопротивлению r 2 ‘.
- Если в асинхронном двигателе постепенно увеличивать активное сопротивление цепи ротора, то значение максимального момента будет оставаться неизменным, а критическое скольжение будет увеличиваться. При этом пусковой момент двигателя Мп возрастает с увеличением сопротивления r 2 ‘ до некоторого значении. На рисунке это соответствует сопротивлению г 2 III , при котором пусковой момент равен максимальному. При дальнейшем увеличении сопротивления r 2 ‘ пусковой момент уменьшается.
- Анализ графиков М = f ( s ) приведенных на рисунке, также показывает, что изменения сопротивления ротора r 2 ‘ сопровождаются изменениями частоты вращения: с увеличением r 2 ‘ при неизменном нагрузочном моменте Мст скольжение увеличивается, т.е. частота вращения уменьшается (точки 1, 2, 3 и 4).

Электромагнитные моменты от высших пространственных гармоник магнитного поля асинхронного двигателя
- МДС трехфазной обмотки статора помимо основной гармоники содержит ряд высших пространственных гармоник. Каждая из этих гармоник создает в машине вращающееся магнитное поле, частота вращения которого в ν раз меньше частоты вращения поля основной гармоники. При этом высшие пространственные гармоники МДС порядка ν = 6х + 1 создают прямовращающиеся (прямые) поля, а гармоники порядка ν = 6х — I — обратновращающиеся (обратные) поля.
 Каждая из этих гармоник создает в машине вращающееся магнитное поле, частота вращения которого в ν раз меньше частоты вращения поля основной гармоники. При этом высшие пространственные гармоники МДС порядка ν = 6х + 1 создают прямовращающиеся (прямые) поля, а гармоники порядка ν = 6х — I — обратновращающиеся (обратные) поля.
Каждая из этих гармоник создает в машине вращающееся магнитное поле, частота вращения которого в ν раз меньше частоты вращения поля основной гармоники. При этом высшие пространственные гармоники МДС порядка ν = 6х + 1 создают прямовращающиеся (прямые) поля, а гармоники порядка ν = 6х — I — обратновращающиеся (обратные) поля.Асинхронные паразитные моменты
- Магнитные поля от высших пространственных гармоник, сцепляясь с обмоткой ротора, наводят в ней ЭДС и создают в двигателе собственные электромагнитные асинхронные моменты.
- Эти моменты ухудшают свойства двигателя, поэтому их принято называть паразитными. При рассмотрении выражения электромагнитного момента и механической характеристики асинхронного двигателя имелось в виду действие лишь магнитного поля основной гармоники. Если же учесть влияние высших пространственных гармоник поля, то кривая электромагнитного момента (см. рис.) окажется искаженной.

Механическая характеристика асинхронного двигателя типа АИРМ160М4У3 М*= f ( s ), где M * = M / M max
M * = 1,0; M *ном=0,44; М*п=0,46; М* min = 0 , 34
Асинхронные паразитные моменты и способы ослабления их влияниия
- Заметное влияние на форму кривой электромагнитного момента оказывают асинхронные паразитные моменты от гармоник поля зубцового порядка (обусловленных наличием зубцов на статоре и роторе):
vZ1 = (Z1/p) ± 1 ; vZ2 = (Z2/p) ± 1 .
- Эффективное средство ослабления влияния высших гармоник на свойства двигателей — скос пазов ротора в пределах зубцового деления. В этом случае ЭДС в стержнях ротора от зубцовых гармоник поля статора снижаются почти до нуля.
- Действие высших гармоник поля ослабляют также правильным выбором числа пазов статора Z 1 и ротора Z 2 . Рекомендуется соотношение Z 2 ≤ l ,25 ( Z 1 ± p ) .
 Рекомендуется соотношение Z 2 ≤ l ,25 ( Z 1 ± p ) .
Рекомендуется соотношение Z 2 ≤ l ,25 ( Z 1 ± p ) .Синхронные моменты
- Между вращающимися магнитными полями высших пространственных гармоник статора и ротора, имеющими одинаковый порядок, возникают силы магнитного взаимодействия. Результатом этого взаимодействия является возникновение синхронного момента М c ν . В общем случае поля статора и ротора от высших пространственных гармоник вращаются с разными частотами ( n ν 1 ≠ n ν 2 ), а поэтому направление синхронного момента Mc ν меняется в зависимости от взаимного расположения магнитных полюсов взаимодействующих полей. Обычно частота изменения знака момента Mc ν велика, и из-за большой инерции ротора этот момент не оказывает заметного влияния на вращение ротора. Но при некоторой частоте вращения ротора поля высших гармоник статора и ротора начинают вращаться с одинаковой частотой вращения ( n ν 1 = n ν 2 ). В этом случае направление синхронного момента Mc ν становится стабильным. В зависимости от взаимного расположения магнитных полюсов магнитных полей момент Mc ν может быть положительным или отрицательным.
 В зависимости от взаимного расположения магнитных полюсов магнитных полей момент Mc ν может быть положительным или отрицательным.
В зависимости от взаимного расположения магнитных полюсов магнитных полей момент Mc ν может быть положительным или отрицательным.Синхронные моменты и способы их уменьшения
- Синхронные моменты в асинхронном двигателе нежелательны, т. е. являются паразитными, так как они могут вызвать провалы в механической характеристике двигателя. Наибольшего значения синхронные моменты достигают при наличии зубцовых гармоник поля статора и ротора одинакового порядка, т. е. при ν z 1 = ν z 2 . Синхронные моменты наиболее опасны при следующих соотношениях пазов статора и ротора ( Z 1 и Z 2 ):
Z 1 = Z 2 ; Z 1 — Z 2 = ±2p.
Особенно нежелательно равенство числа пазов на статоре и роторе ( Z 1 = Z 2 ), так как это может привести к «прилипанию» ротора к статору: зубцы ротора силами магнитного тяжения удерживаются под зубцами статора. Уменьшению синхронных моментов способствует скос пазов на роторе.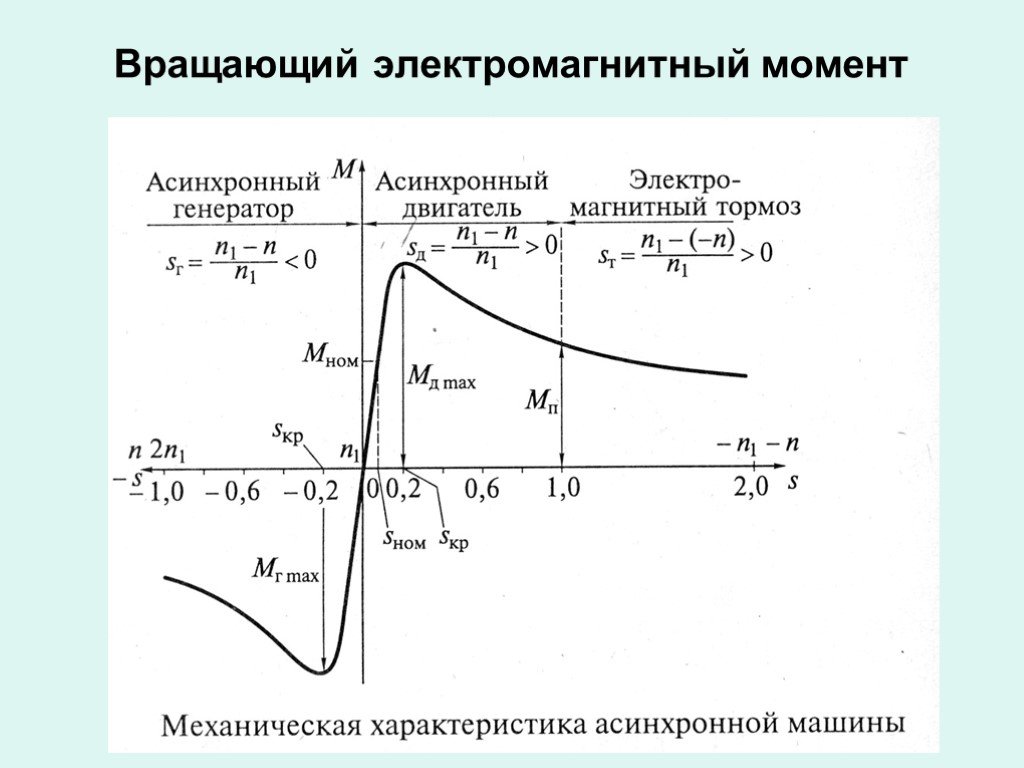
Спасибо за внимание !
Электромагнитный момент асинхронного двигателя переменного тока
Момент, развиваемый двигателем равен электромагнитной мощности, деленной на синхронную скорость вращения электропривода.
M = Pэм/ω0
Электромагнитная мощность – это мощность, передаваемая через воздушный зазор от статора к ротору, и она равна потерям в роторе, которые определяются по формуле:
Pэм = m · I22 · (r2’/s)
m – число фаз.
M = Mэм = (Pm/ω0) · (I2’)2 · (r2’/s)
Электромеханической характеристикой асинхронного двигателя является зависимость I2’ от скольжения. Но так как асинхронная машина работает только в качестве электродвигателя, основной характеристикой является механическая характеристика.
Упрощенное выражение механической характеристики:
M = Mэм = (Pm/ω0) · (I2’)2 · (r2’/s)
Подставив в это выражение значение тока, получим:
M = [P·3·Uф2·(r2’/s)] / [ω0·[(r1 + r2’/s)2 + (x1 + x2’)2]]
Будем считать, что m=3.
Ω = ω0/p
Вместо ω0 нужно подставить механическую скорость, в результате чего число пар полюсов сокращается.
Уравнение механической характеристики асинхронного двигателя:
M = [3·Uф2·(r2’/s)] / [ω0·[(r1 + r2’/s)2 + (x1 + x2’)2]]
При переходе асинхронного двигателя в генераторный режим, скорость вращения ω > ω0 и скольжение становится отрицательным (s Когда скольжение изменяется от 0 до +∞, режим называется «режимом электромагнитного тормоза».
Задаваясь значениями скольжения от о до +∞, получим характеристику:
Кривые электромагнитного момента и токов асинхронной машины (полная механическая характеристика асинхронного двигателя).
Как видно из механической характеристики, она имеет два экстремума: один на отрезке изменения скольжения на участке от 0 до +∞, другой на отрезке от 0 до -∞.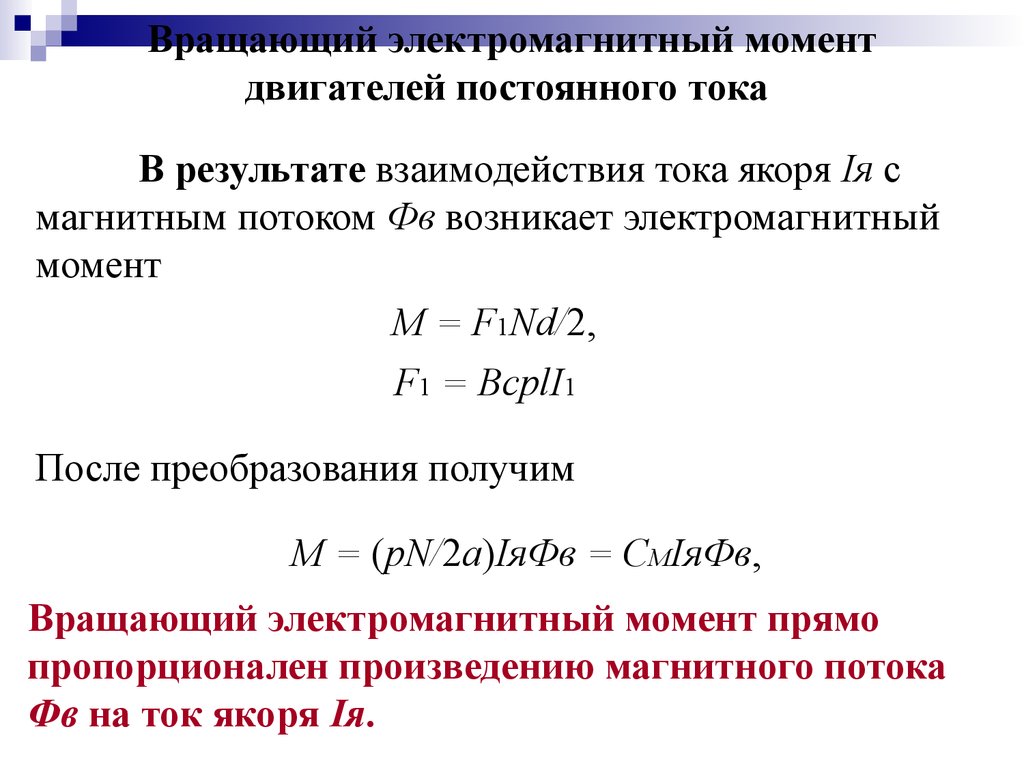
dM/ds=0
Mmax = [3·Uф2·(r2’/s)] / [2ω0·[r1 ± √(r12 + (x1 + x2’)2)]]
+ относится к двигательному режиму.
– относится к генераторному режиму.
Mmax=Mкр
Mкр – критический момент.
Скольжение, при котором момент достигает максимума, называется критическим скольжением, и оно определяется по формуле:
sкр = ±[r2’/(x1+x2’)]
Критическое скольжение имеет одинаковое значение и в двигательном и в генераторном режимах.
Величину Mкр можно получить, подставив в формулу момента значение критического скольжения.
Момент при скольжении равном 1 называется пусковым моментом. Выражение для пускового момента можно получить, подставив 1 в формулу:
Mп = [3·Uф2·r2’] / [ω0·[(r1 + r2’)2 + (x1 + x2’)2]]
Поскольку знаменатель в формуле момента максимального на несколько порядков больше Uф, принято считать Mкр≡Uф2.
Критическое скольжение зависит от величины активного сопротивления обмотки ротора R2’. Момент пусковой, как видно из формулы, зависит от активного сопротивления ротора r2’. это свойство пускового момента используется в асинхронных двигателях с фазным ротором, у которых пусковой момент увеличивают путем введения активного сопротивления в цепь ротора.
Электромагнитный крутящий момент и мощность | bartleby
Что такое электромагнитный момент?
Электромагнитный крутящий момент — это крутящий момент, необходимый для запуска вращения двигателя, и он обычно равен крутящему моменту нагрузки. Выходной электромагнитный момент (момент, создаваемый якорем на воздушном зазоре) представляет собой момент нагрузки на холостом ходу, а момент нагрузки равен электромагнитному моменту. Из-за электромагнитной силы электрический крутящий момент представляет собой круговое движение. Крутящий момент – это радиальная сила от оси вращения. Это векторное векторное произведение радиуса и векторов силы.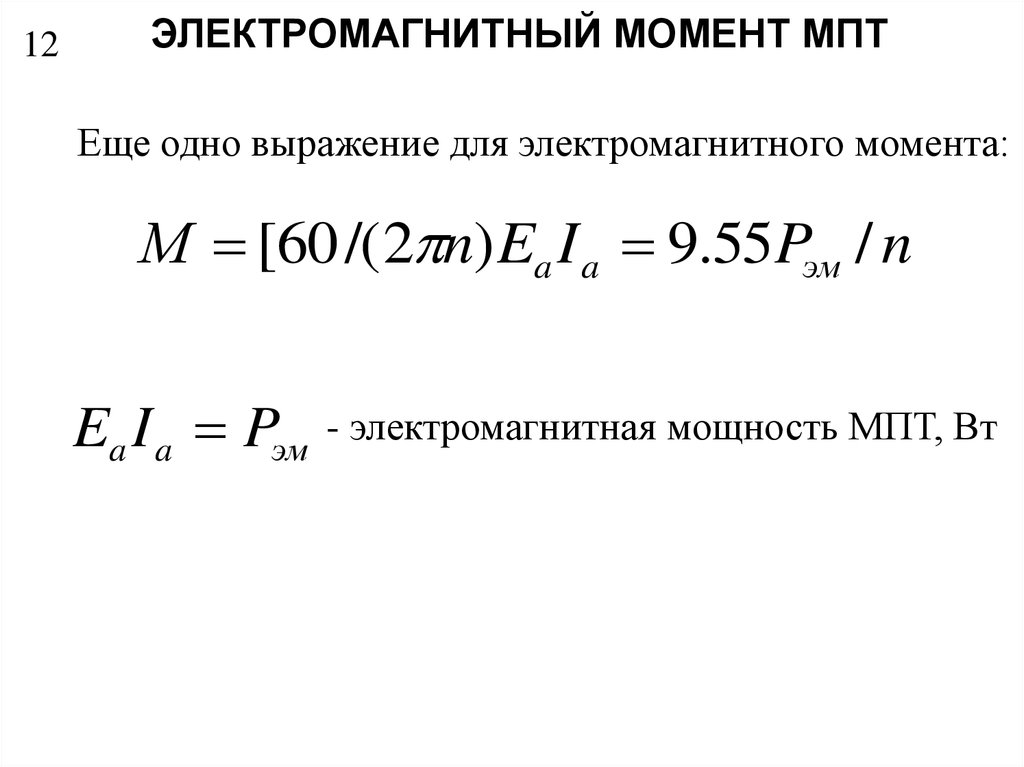
Что такое электромагнитная энергия?
Несущая энергия электромагнитной волны определяется как электромагнитная мощность. Поскольку магнетизм — это форма энергии, отраженная или излучаемая объектами, которая может путешествовать в пространстве в виде электрических волн и магнитов. Электромагнитная мощность создается энергией, которая течет в волне, и переносимая таким образом энергия пропорциональна квадрату амплитуды волны. Примеры такой несущей способности волн включают радиоволны, микроволны, инфракрасный свет, видимый свет (все цвета спектра, которые мы видим), ультрафиолетовый свет, рентгеновские лучи и гамма-лучи.
Типы электромагнитного крутящего момента
Четыре типа крутящего момента в двигателе: крутящий момент с заблокированным ротором (LRT), тяговый момент (PUT), опрокидывающий крутящий момент (BDT) и крутящий момент при полной нагрузке (FLT).
Полная нагрузка Против. Скорость двигателя
Крутящий момент с заблокированным ротором
Крутящий момент с заблокированным ротором (LRT) — это крутящий момент, создаваемый двигателем, ротор которого неподвижен и к двигателю прилагается полная мощность.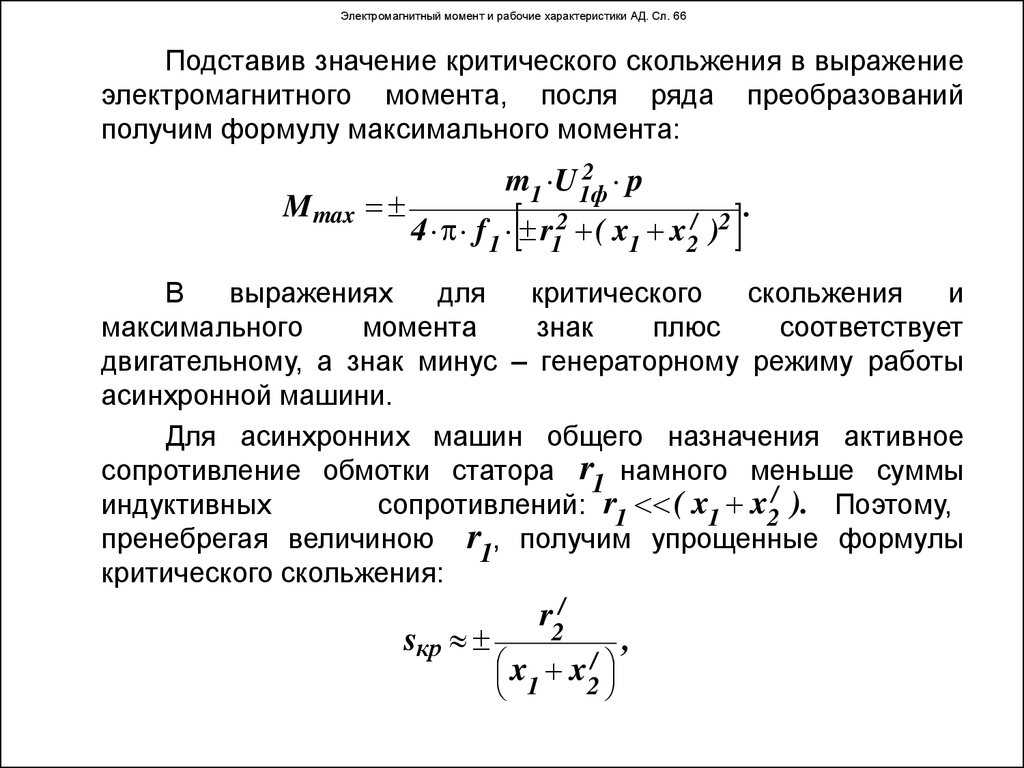 Первый крутящий момент, также известный как крутящий момент заблокированного ротора, представляет собой крутящий момент двигателя каждый раз, когда он запускается с ограниченным напряжением и частотой. Это крутящий момент, создаваемый, когда мощность подается на двигатель в состоянии покоя, т. Е. Когда синхронный двигатель приводится в действие при полном напряжении, а вал закрыт на месте. Это крутящий момент, используемый для начала ускорения нагрузки. Крутящий момент заблокированного ротора автомобиля является важным фактором. Крутящий момент с заблокированным ротором — это электрический крутящий момент двигателя, который увеличивается, когда он находится в состоянии покоя или при нулевой синхронной скорости. Величина тока блокировки ротора определяется мощностью синхронного двигателя и конструктивными особенностями. Вот некоторые важные моменты для крутящего момента ротора:
Первый крутящий момент, также известный как крутящий момент заблокированного ротора, представляет собой крутящий момент двигателя каждый раз, когда он запускается с ограниченным напряжением и частотой. Это крутящий момент, создаваемый, когда мощность подается на двигатель в состоянии покоя, т. Е. Когда синхронный двигатель приводится в действие при полном напряжении, а вал закрыт на месте. Это крутящий момент, используемый для начала ускорения нагрузки. Крутящий момент заблокированного ротора автомобиля является важным фактором. Крутящий момент с заблокированным ротором — это электрический крутящий момент двигателя, который увеличивается, когда он находится в состоянии покоя или при нулевой синхронной скорости. Величина тока блокировки ротора определяется мощностью синхронного двигателя и конструктивными особенностями. Вот некоторые важные моменты для крутящего момента ротора:
- Устройства плавного пуска с пониженным напряжением: Они используются для ограничения тока пуска, чтобы уменьшить крутящий момент заблокированного ротора или пусковой крутящий момент, и обычно используются в системах, которые трудно запустить или которые требуют тщательного контроля, таких как хорошие транспортные насосы, ящики, лифты и т. д.
 д.
д.- Короткозамкнутый ротор: Короткозамкнутый ротор состоит из плакированного металлом в центре с равномерно расположенными медными стержнями или алюминиевыми стержнями, размещенными в осевом направлении в окружающей области, постоянно укороченными на концах кольцами .
- Ротор с обмоткой: Ротор представляет собой стальной цилиндр с изгибом в 3 градуса, равномерно разнесенный на 120 градусов и соединенный Y-образной подвеской.
- Неявнонаправленный ротор: Цилиндрический ротор изготовлен из прочной стали с промежутками по внешней длине цилиндра для удержания обмотки возбуждения ротора с медными стержнями с лентой, вставленными в промежутки и защищенными клиньями.
Тяговый момент (PUT)
Подтягивающий момент — это небольшой крутящий момент, создаваемый электродвигателем переменного тока при переходе от нулевой скорости к полной нагрузке (до того, как он достигнет точки останова крутящего момента).
Опрокидывающий крутящий момент (BDT)
Опрокидывающий крутящий момент — это максимальный крутящий момент, доступный до того, как крутящий момент падает по мере того, как электрическая машина разгоняется до рабочих условий.
Крутящий момент при полной нагрузке (FLT)
Крутящий момент при полной нагрузке требует, чтобы ограниченная мощность электромобилей вырабатывалась на скорости с полной нагрузкой.
Измерение электромагнитного момента
Крутящий момент — это мера силы, которая может заставить элемент вращаться вокруг оси. Мощность — это то, что заставляет объект ускоряться в линейной кинематике. Кроме того, крутящий момент является причиной углового ускорения. Следовательно, крутящий момент может быть описан из-за равенства вращения линейной мощности. Точка, в которой вращается элемент, является осью вращения. В физике крутящий момент — это просто тенденция к повороту или скручиванию.
Электромагнитный крутящий момент
Простой способ расчета крутящего момента состоит в том, чтобы сначала определить плечо рычага, а затем умножить его на мгновенное приложение силы. Крутящий момент зависит от значения силы и вертикального расстояния между точкой и коэффициента приложенной силы. Следовательно, математический крутящий момент выражается следующим образом:
Крутящий момент зависит от значения силы и вертикального расстояния между точкой и коэффициента приложенной силы. Следовательно, математический крутящий момент выражается следующим образом:
τ=F r sin θ
Направление крутящего момента
Плотность энергии электромагнитной волны
Рассмотрим магнитное поле, которое распространяется в расслабленной атмосфере в положительном направлении оси x. Электрическое поле связано с волновыми изменениями в направлении y, а магнитное поле чередуется в направлении z. Электрическое и магнитное поля математически представлены в форме косинуса:
Eyx, t=E0 cos kx-ωtBzx, t=B0 cos kx-ωt
Энергия, запасенная в любой части электрической волны, представляет собой сумму электрических плотность энергии и магнитное поле. Количество энергии, хранимой в объеме, представляет собой количество электрической энергии (U), которое представляет собой общее количество электрической энергии (U E ) и плотность энергии магнитного поля (U B ).
Обобщение феноменологических уравнений для электромагнитных полей в сверхпроводниках основано на алгебраическом пространстве-времени.
Определение плотности магнитного поля, в котором 𝜇 0 — проницаемость в свободном пространстве, а 𝜺 0 — диэлектрическая проницаемость в свободном пространстве, уравнение для единицы мощности Джм3.
U=UB+UE=121μ0B2+ε0E2
Различия между электромагнитной мощностью и электромагнитным моментом
- Мощность — это количество энергии, потребляемой в единицу времени, а крутящий момент — это уровень электричества, действие которого может вращаться вокруг объекта.
- Единица силы представляет собой второй объем, а единица крутящего момента равна объему. Единицей мощности в системе СИ является ватт, а единицей крутящего момента в системе СИ является ньютон-метр.
- Электроэнергия является результатом работы генератора или батареи, а мощность электрической машины увеличивается за счет выполнения работы.
- Крутящий момент возникает, когда энергия прикладывается к объекту или телу.
Распространенные ошибки
Помните, что крутящий момент электродвигателя пропорционален выходной мощности магнитного потока и току якоря. Механический крутящий момент или момент нагрузки пропорционален произведению силы на расстояние. Ток и напряжение синхронного двигателя изменяются в зависимости от используемого момента нагрузки. Когда синхронный двигатель работает стабильно, ток и напряжение якоря не изменяются, а электрический момент равен и противоположен механическому моменту. Итак, здесь механический момент равен вращению линейной силы. В зависимости от исследования его также называют моментом, моментом силы, вращающей силой или точкой поворота. Идея механического крутящего момента возникла из исследований Архимеда по использованию рычагов.
Контекст и приложения
В каждом из экспертных экзаменов для студентов и аспирантов эта тема огромна и в основном преподается в
- Бакалавр технологии в области электротехники и электроники
- Бакалавр наук в области физики
- Магистр Физика
- Электромагнитное излучение
- Механический крутящий момент
Практические задачи
Q1.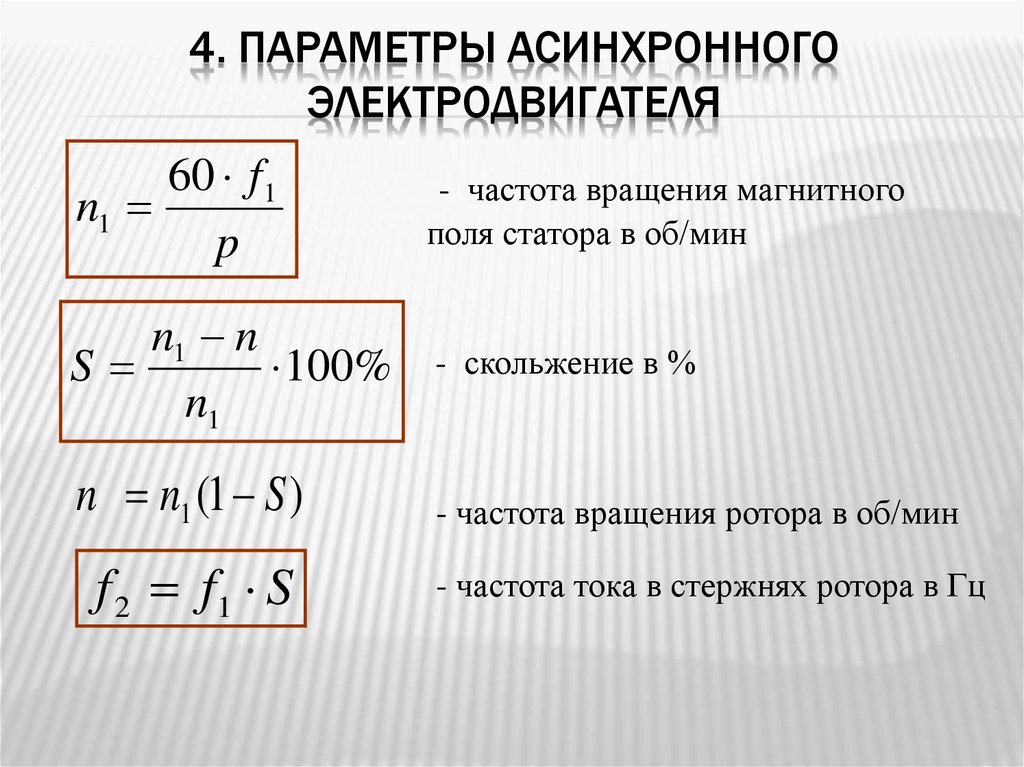 Для крутящего момента T=BIAcosθ найдите угол, при котором крутящий момент минимален.
Для крутящего момента T=BIAcosθ найдите угол, при котором крутящий момент минимален.
- 30
- 45
- 60
- 90
Правильный вариант: (D)
Объяснение: . Крущен петля дирижации дается T = BIA COS. Минимальный крутящий момент относится к нулевому крутящему моменту. Это возможно только тогда, когда угол равен 90° или перпендикулярен, так как это делает член cos90=0.
Q2. Значение мощности, генерируемой волной, когда ее компонент H составляет 0,75 единицы.
- 141,375
- 444,832
- 233,975
- 567,223
Правильный вариант:
В воздушной среде η=377, при этом H=0,75. A
Подставьте значения и решите как
P=377×0,7522P=141,375 ед. Определить мощность волны с напряженностью поля 8 в воздухе.
- 0,05
- 0,02
- 0,08
- 0,09
Правильный вариант: (c)
Объяснение:
Замените значения E=8 и η=377 воздуха.
Решите для мощности
P=822×377P=0,08 ед.
Q4. Предположим, что электрическое поле имеет напряженность 5 единиц и плотность поля 7 единиц. Найдите мощность, приходящуюся на единицу скорости волны.
- 90
- 66
- 35
- 19
Правильный вариант: (c)
Объяснение: Скорость мощности на мощность — это продукт. Решите как
Pv=E.dPv=5×7Pv=35 единиц
Q5. Учтите, что средняя мощность волны равна 10 единицам, а волна имеет поверхностную плотность 0,2 единицы. Определить полную мощность волны.
- 2.2
- 2.0
- 2.4
- 2.5
Правильный вариант: (б)
Полная формула is. Подставляем значения Pavg=10 и ∫ds=0,2, общая мощность равна 2 единицам.
Мы обеспечим вас пошаговыми решениями миллионов задач из учебников, экспертами в любой области наготове 24 часа в сутки, 7 дней в неделю, когда вы запутались, и многое другое.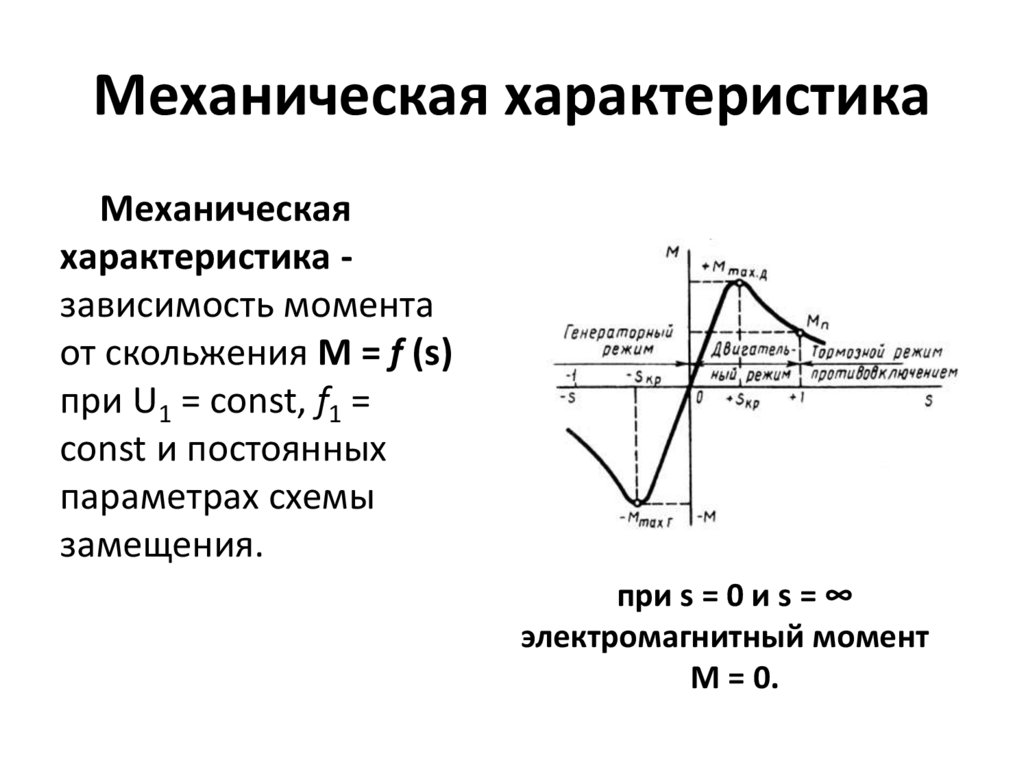
Ознакомьтесь с примером решения вопросов и ответов по электротехнике здесь!
*Время ответа зависит от темы и сложности вопроса. Среднее время отклика составляет 34 минуты для платных подписчиков и может быть больше для рекламных предложений.
Расчет электромагнитного момента асинхронного двигателя с кольцевыми обмотками по программе «ANSYS Maxwell»
- title={Расчет электромагнитного момента асинхронного двигателя с кольцевыми обмотками с помощью «ANSYS Maxwell»},
author={Ольга В Тихонова и Анатолий Пластун},
journal={Конференция IEEE российских молодых исследователей в области электротехники и электронной техники (EIConRus) 2017},
год = {2017},
страницы = {1600-1605}
}- О. Тихонова, А. Пластун
- Опубликовано в 2017 г.
- Машиностроение
- 2017 г. асинхронный двигатель с кольцевыми обмотками (АДРО), предназначенный для использования в оборудовании по переработке радиоактивных отходов, в средах с повышенным уровнем радиации и температурой более 200 градусов по заказу «ANSYS Maxwell». Конструкция магнитной системы статора не имеет оси симметрии и обеспечивает послойную организацию движения магнитного поля статора: от прямолинейного движения в ярме статора до кругового…
Просмотр на IEEE
doi.org
Электромагнитный расчет асинхронного двигателя с помощью «ANSYS Maxwell»
- Тихонова О.В., Пластун А.В. (EIConRus)
- 2018
Приведены расчетный метод определения индукции в воздушном зазоре, основной поток, метод расчета и построения механической характеристики асинхронного двигателя с короткозамкнутым ротором и графики различных представлены характеристики.
Нетрадиционный закон создания периодически изменяющегося разнополюсного магнитного поля в электрических машинах переменного тока малой мощности с использованием кольцевых катушек в многофазной обмотке якоря
- Пластун А.В., Тихонова О.В., Малыгин И. В.
Физика
- 2018
В статье представлены способы создания периодически изменяющегося разнополюсного магнитного поля в маломощных электрических машинах. Авторы рассматривают классические конструкции электрических машин и машин с…
ПОКАЗАНЫ 1-10 ИЗ 24 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантность Наиболее влиятельные документыНедавность
Тороидальный силовой дроссель с постоянным магнитом и повышенным током насыщения
В этом документе представлен силовой дроссель с тороидальным сердечником, в зазоре которого используется постоянный магнит ) для увеличения тока насыщения при сохранении того же размера и индуктивности.…
Оперативный мониторинг механических неисправностей в приводах асинхронных двигателей с регулируемой скоростью с использованием распределения Вигнера
В этой статье предлагается использовать частотно-временное распределение, распределение Вигнера, для анализа тока статора, и представлены результаты в установившемся режиме и во время переходных процессов с колебаниями момента нагрузки и дисбалансом нагрузки.
Бездатчиковое управление асинхронными машинами — с подачей сигнала или без?
Диаграммы потока сигналов комплексных пространственно-векторных величин используются для подробного описания систем, используемых в бездатчиковом управлении асинхронными двигателями.
Сравнение различных методов диагностики неисправностей ротора асинхронного двигателя значительному влиянию на промышленное производство. Поэтому было представлено большое количество методов обнаружения, чтобы избежать…
Сравнение параметров трансформатора с круглой и прямоугольной обмоткой для беспроводной передачи энергии на основе анализа методом конечных элементов
- Daniel Ongayo, M. Hanif
Engineering
13-я Бразильская конференция IEEE по силовой электронике и 1-я Южная конференция по силовой электронике (COBEP/SPEC) 2015
- 2015
- Р. Шнибха, А. С. Альбарабар
Инженерное дело
- 2012
- M. Díaz, R. Cárdenas, F. Rojas, J Клэр
Машиностроение
- 2014
3 Основные параметры силовых трансформаторов (БПЭ) — это собственная индуктивность, взаимная индуктивность и коэффициент связи.
Из-за уникального и сложного характера этих трансформаторов…Интеллектуальный метод диагностики асинхронных двигателей путем контроля коэффициента мощности с использованием только измеренного тока
Эта статья посвящена точному, раннему и надежному обнаружению и диагностике неисправностей асинхронных двигателей с использованием усовершенствованного метода измерения параметров мощности. Устройства защиты IM, как правило…
3-фазный 4-проводной матричный генератор падений/скачков напряжения на основе преобразователя для проверки низковольтной проходимости в системах преобразования энергии ветра
Высокое проникновение энергии от систем преобразования энергии ветра (WECS) может иметь значительное влияние на стабильность, качество электроэнергии и надежность энергосистем.
 Конструкция магнитной системы статора не имеет оси симметрии и обеспечивает послойную организацию движения магнитного поля статора: от прямолинейного движения в ярме статора до кругового…
Конструкция магнитной системы статора не имеет оси симметрии и обеспечивает послойную организацию движения магнитного поля статора: от прямолинейного движения в ярме статора до кругового…  В.
В.
 Из-за уникального и сложного характера этих трансформаторов…
Из-за уникального и сложного характера этих трансформаторов…