Содержание
Электродвигатели Parker Hannifin
Электродвигатели Parker Hannifin представлены двигателями постоянного тока, коллекторныыми двигателями с постоянными магнитами, и двигателями переменного тока, синхронными и асинхронными с короткозамкнутым ротором.
Синхронные двигатели.
Серия GVM.
Двигатели GVM являются синхронными серводвигателями переменного тока на постоянных магнитах. Достаточно большая величина крутящего момента, быстродействие и эффективность двигателей Parker Hannifin серии GVM обеспечивают требуемые условия для достижения впечатляющих рабочих характеристик во множестве платформ транспортных средств. Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Одним из знаковых применений двигателей серии GVM является использование в мотоциклах-прототипах фирмы Victory в гонке 2015 года на острове Мэн. Гонка на острове Мэн — самая длинная гонка для электромотоциклов в мире.
Двигатель Parker Hannifin серии GVM выдерживает очень высокие средние скорости порядка 200 км/ч
и обеспечивает длительную беспрерывную работу
в экстремальных температурных условиях.
Питание: 24 — 800 В DC.
Тип: синхронный, с редкоземельными магнитами.
Количество полюсов: 12.
Крутящий момент: до 376 Н·м.
Номинальная мощность: до 170 кВт.
Частота вращения: до 9800 Об/мин.
Обратная связь: резольвер, SinCos энкодер, бессенсорный.
Типоразмер: 142, 210.
Исполнение: IP67, IP6K9K (опц.).
Особенности: Отличное решения для мобильных приложений (электрокары, электромотоциклы и т.д.).
Серия NV.
Серия NV — синхронные двигатели с постоянными магнитами разработанные для высокоскоростных приложений. Высокая точность, низкий уровень вибрации и долгий срок службы обеспечивают работу при максимальной скорости вращения до 17000 об/мин. Уровень защиты корпуса: IP64, IP65, IP67 (по запросу).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 11,5 Нм.
Номинальная мощность: 0,7 — 11 кВт.
Частота вращения: 7000 — 17000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 60, 80, 110, 130.
Исполнение: IP64, IP65 (опц.).
Особенности: Подходят для высокоскоростных приложений.
Серия SMB/H/E, MB/H/E, NX.
Серии двигателей SMB/H/E, MB/H/E, NX представляют линейку синхронных двигателей с постоянными или редкоземельными магнитами.
Благодаря инновационной технологии «Salient Pole» (использование неодимового магнита — мощного постоянного магнита, состоящего из сплава редкоземельного элемента неодима, бора и железа) двигатели серии SMB/H/E, MB/H/E достигают высоких ускорений и выдерживают большие перегрузки без риска размагничивания или отрыва магнита. Совместимы со следующими сериями приводов: SLVD-N, TPD-M, HiDrive, ViX, TWIN-N/SPD-N.
Двигатели серии NX — компактные, с низкой пульсацией момента и плавным ходом, являются эффективной альтернативой традиционным индукционным двигателям. Бессенсорная версия двигателя была разработана в качестве альтернативного решения для минимизации затрат в сочетании с приводом Parker Hannifin AC650S.
Питание: 230, 400 — 480 В AC.
Тип: синхронный, с постоянными / редкоземельными магнитами.
Количество полюсов: 4 — 10.
Крутящий момент: 0,35 — 269 Нм.
Номинальная мощность: 0,2 — 67 кВт.
Частота вращения: 0 — 10000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), инк. энкодер.
Типоразмер: 40, 42, 56, 60, 70, 82, 92, 100, 105, 115, 120, 142, 145, 155,170, 205, 265.
Исполнение: IP44, IP64, IP65, IP67.
Особенности: Компактные с низкой пульсацией момента и плавным ходом.
Серия NK.
Серия NK — встраиваемые компактные бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений, обеспечивают работу при максимальной скорости вращения до 15000 об/мин.
Питание: 230, 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 90 Нм.
Номинальная мощность: 0,2 — 34 кВт.
Частота вращения: 1000 — 15000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 42, 56, 62, 80, 110, 143.
Исполнение: IP00.
Особенности: Встраиваемые, компактные, для высокоскоростных приложений.
Серия TM/TK.
Серии синхронных двигателей с постоянными магнитами TM/TK обладают высокой прочностью и обеспечивают работу в жестких условиях. Высокий крутящий момент на малых оборотах предоставляет пользователю решение для следующих приложений: прессы, миксеры, намоточные машины, экструдеры. Серия TM имеет бескорпусное исполнение.
Питание: 400 — 480 В AC.
Тип: синхронный, с постоянными магнитами / +бескорпусной.
Количество полюсов: 24 — 120.
Крутящий момент: 90 — 22100 Нм.
Номинальная мощность: 6,9 — 394 кВт.
Частота вращения: 29 — 2500 Об/мин.
Обратная связь: Endat энкодер, бессенсорный, резольвер (опц.).
Типоразмер, мм: 398, 600, 830 / 230, 385, 565, 795.
Исполнение: IP54 / IP00.
Особенности: Высокий крутящий момент на малых оборотах, для прессов, миксеров, намоточных машин, экструдеров.
Серия HKW/SKW.
Серия HKW/SKW — бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений мощностью до 230 кВт. Электродвигатели используются в приложениях, где высокий крутящий момент на низкой скорости и высокая скорость при постоянной мощности являются критичными характеристиками.
Питание: 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 4 — 16.
Крутящий момент: 3,5 — 1250 Нм.
Номинальная мощность: 2,0 — 230 кВт.
Частота вращения: 260 — 23200 Об/мин.
Обратная связь: бессенсорный, резольвер (опц. ).
).
Типоразмер: 73, 82, 85, 91, 96, 108, 155.5, 195, 242, 310.
Исполнение: IP00.
Особенности: Встраиваемые, решения для высокоскоростных приложений.
Серия MGV.
Синхронный двигатель MGV на постоянных магнитах обеспечивает работу при максимальной скорости вращения до 45000 об/мин, используется во многих компонентах автомобильных или авиационных испытательных установок.
Питание: 400 — 480 В AC.
Тип: синхронный, на постоянных магнитах.
Количество полюсов: 4 — 16.
Крутящий момент: 6,8 — 1500 Нм.
Номинальная мощность: 15 — 500 кВт.
Частота вращения: 5000 — 45000 Об/мин.
Обратная связь: резольвер.
Типоразмер: 430, 635, 840, 860, 950, 966, A50, B40, B50.
Исполнение: IP40.
Особенности: Для высокоскоростных приложений тестовых стендов.
Серия EX/EY.
Синхронные электродвигатели EX/EY с постоянными магнитами обеспечивают работу в Зоне 2 при окружающей температуре от 40 ºC до 60 º. Оборудование соответствует стандартам ATEX, IECEx (Зона 1, 2).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 1,75 — 41 Нм.
Номинальная мощность: до 6,3 кВт.
Частота вращения: 0 — 7600 Об/мин.
Обратная связь: резольвер, энкодер (опц.) (EnDat, Hiperface), бессенсорный.
Типоразмер:, 70, 92, 120, 121, 155.
Исполнение: IP64, IP65.
Особенности: ATEX, IECEx (зона 1, 2).
Асинхронные двигатели. Серия MS/MR.
Асинхронные двигатели серии MR подходят для использования со всеми сериями приводов Parker Hannifin переменного тока. Благодаря прочной жесткой конструкции и своим рабочим характеристикам, двигатели серии MR используются в жестких условиях.
Серия MS асинхронных двигателей Parker Hannifin была специально разработана для высокодинамичных приложений и использования с приводами переменного тока Parker Hannifin, имеющими векторное управление по замкнутому контуру, а именно: AC890, AC690+. Двигатели позволяют выполнять операции на постоянной мощности при максимальной скорости вращения до 8000 об/мин. Размеры корпуса идентичны корпусу двигателя постоянного тока с аналогичной мощностью. Уровень защиты корпуса: IP23, IP54, IP55 (опционально).
Размеры корпуса идентичны корпусу двигателя постоянного тока с аналогичной мощностью. Уровень защиты корпуса: IP23, IP54, IP55 (опционально).
Питание: 400-460 В AC.
Тип: асинхронный.
Количество полюсов: 2 — 6.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальная мощность: 0,09 — 524 кВт.
Частота вращения: 0 — 8000 Об/мин.
Обратная связь: энкодер, резольвер (опц.).
Типоразмер: MS100, MS133, MS166, MS180, MS225, MS280; 56 — 200, 180 — 355.
Исполнение: IP23, IP54, IP55.
Особенности: Решение для широкого ряда приложений.
Коллекторные двигатели. Серия RS, RX / AXEM.
Сервомоторы серии RS — малоинерционные двигатели с магнитом из редкоземельных металлов.
Серия RX представляет собой высокоинерционные двигатели с ферритовым магнитом, которые демонстрируют высокие характеристики при работе на холостом ходу. Двигатель RX является экономически эффективным решением для различных серво-приложений. Серия RX также обеспечивает работу маломощных систем в Чистых помещениях.
Сервомоторы RS/RX постоянного тока в сочетании с приводами серии RTS полностью подходят для применений, где требуется компактное решение или высокий динамический уровень.
Двигатели серии AXEM являются одними из самых распространенных серводвигателей во всем мире — парк установленного оборудования насчитывает более 2 000 000 единиц. Сервомотор обеспечивает высокую динамику и управление на низкой скорости, а также работу без шума и вибраций. Надежное и эффективное решение с низкими эксплуатационными расходами.
Питание: 14 — 178 В DC.
Тип: коллекторный с редкоземельными магнитами / с плоским ротором.
Количество полюсов: 4 / нет.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальный ток: 1,5 — 28 А.
Частота вращения: 2000 — 4800 Об/мин.
Обратная связь: тахогенератор, энкодер, резольвер.
Типоразмер: 39, 52, 58, 68, 83, 84, 97, 100, 110, 120, 140, 160, 211, 278.
Исполнение: IP20, IP40, IP54.
Особенности: Отличное управление на низкой скорости вращения, компактность, для медицинских приложений.
Видеоролик ВСП: Электромеханика Parker Hannifin.
Брошюра: Электромеханика Parker Hannifin (PDF, RU) …>>
Информационный бюллетень: Электродвигатели Parker Hannifin (PDF, RU) ..>>
Информационный бюллетень: Электромеханика Parker Hannifin (PDF, RU) …>>
Информационный бюллетень: Серводвигатели серии SMB / SMH / SME Parker Hannifin (PDF, RU) …>>
Информационный бюллетень: Серводвигатели серии MB / MH / ME Parker Hannifin (PDF, RU) …>>
Каталог: Решения для управления движением (26 MB, PDF, EN) …>>
Синхронный двигатель переменного тока в Волгограде: 630-товаров: бесплатная доставка, скидка-10% [перейти]
Партнерская программаПомощь
Волгоград
Каталог
Каталог Товаров
Одежда и обувь
Одежда и обувь
Стройматериалы
Стройматериалы
Здоровье и красота
Здоровье и красота
Текстиль и кожа
Текстиль и кожа
Детские товары
Детские товары
Продукты и напитки
Продукты и напитки
Электротехника
Электротехника
Дом и сад
Дом и сад
Промышленность
Промышленность
Сельское хозяйство
Сельское хозяйство
Вода, газ и тепло
Вода, газ и тепло
Все категории
ВходИзбранное
ЭлектротехникаЭлектрические машины, электродвигателиОбщепромышленные электродвигателиДвигатели переменного токаСинхронный двигатель переменного тока
46 917
3GAA111101-ADE; Асинхронный двигатель M2AA 112 M,IE1 ,мощн 4кВт,3000 об/мин, B3 ABB Производитель:
ПОДРОБНЕЕЕще цены и похожие товары
63 213
Электродвигатель АИР 160S6 — 11×970 IM1081(B3) лапы энерал
ПОДРОБНЕЕЕще цены и похожие товары
108 034
Электродвигатель АИС 180L4 — 22×1470 IM1081(B3) лапы энерал
ПОДРОБНЕЕЕще цены и похожие товары
Двигатель переменного тока синхронный однофазный, оригинал LG EAU42744406 Тип: двигатель,
ПОДРОБНЕЕЕще цены и похожие товары
462
519
Электродвигатель для микроволновки 49TYZ-A2, диаметр вала 7 мм x 11 мм, переменный ток 220-240 В, 4 Вт, 5/6 об/мин, вращающийся, синхронный, для печи
ПОДРОБНЕЕЕще цены и похожие товары
50KTYZ Синхронный двигатель с постоянным магнитом CW CCW Низкоскоростной двигатель с высоким крутящим моментом 220 В переменного тока 6-10 Вт миниатюрный 30 об мин
ПОДРОБНЕЕЕще цены и похожие товары
Двигатель переменного тока, однофазный, синхронный для швейных машин с педалью Jegon HF-0926N, 220 В.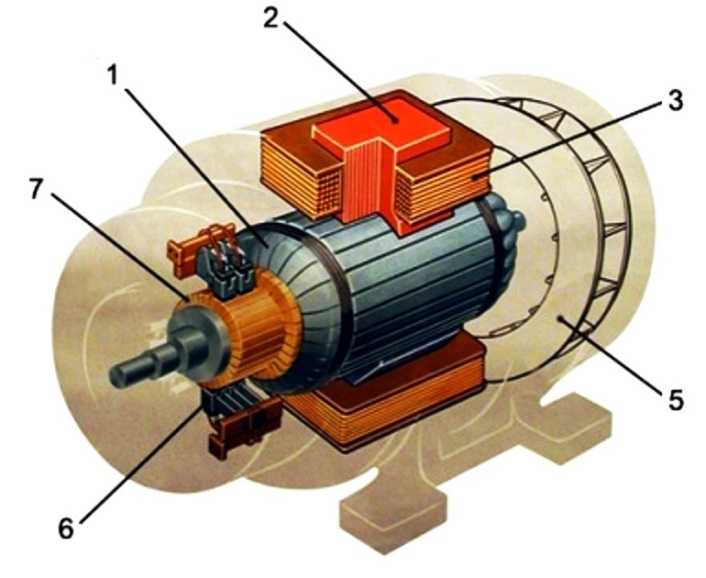 , 90 Вт.
, 90 Вт.
ПОДРОБНЕЕЕще цены и похожие товары
Двигатель переменного тока, однофазный, синхронный для оверлоков с педалью Jegon HF-1528S, 220 В., 150 Вт.
ПОДРОБНЕЕЕще цены и похожие товары
9 999 999
Электродвигатель АМН180S2 — 37×2935 IM1001(B3) лапы энерал
ПОДРОБНЕЕЕще цены и похожие товары
114 925
Электродвигатель АИР 180M4 — 30×1470 IM1081(B3) лапы элмаш
ПОДРОБНЕЕЕще цены и похожие товары
1 400
1499
Регулятор оборотов двигателя переменного тока US-52 до 400W Тип: Ограничитель мощности, Размер:
В МАГАЗИНЕще цены и похожие товары
12 343
Редуктор переменного тока, мотор YN90-40 Вт, микромотор 220 В, 40 Вт, однофазный двигатель
ПОДРОБНЕЕЕще цены и похожие товары
1 632
1774
Синхронный мотор-редуктор 220 В переменного тока 60KTYZ 60-KTYZ Мотор-редуктор 220 В, 2,5 об/мин
ПОДРОБНЕЕЕще цены и похожие товары
Коробка передач двигателя постоянного тока автомобиля коробки передач 6В электрического двигателя РС 390 18000 об/мин
ПОДРОБНЕЕЕще цены и похожие товары
7 195
7574
Редукторный двигатель переменного тока 60 Вт 220 В/редукторный электродвигатель 5IK60RGN-CF + регулятор скорости, редукторный электродвигатель
ПОДРОБНЕЕЕще цены и похожие товары
Коробка передач двигателя постоянного тока автомобиля коробки передач 6В электрического двигателя РС 390 18000 об/мин
ПОДРОБНЕЕЕще цены и похожие товары
Коробка передач двигателя постоянного тока автомобиля коробки передач 6В электрического двигателя РС 390 18000 об/мин
ПОДРОБНЕЕЕще цены и похожие товары
15 307
Трехфазный шаговый двигатель 110 j12220-360, 20 нм, 220 В переменного тока
ПОДРОБНЕЕЕще цены и похожие товары
1 010 332
Эл.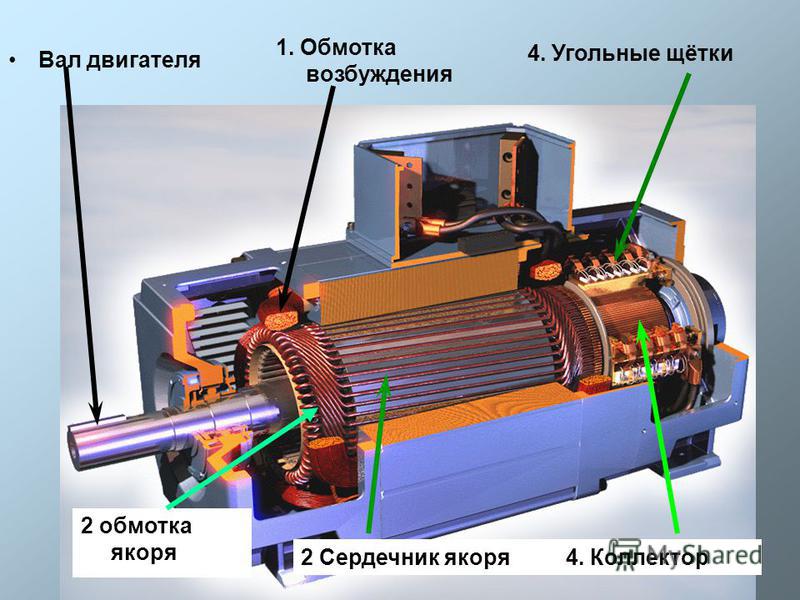 двигатель взрывозащищенный ВА 315M2 — 200 кВт 2975 об/мин IM1081(B3) лапы элмаш
двигатель взрывозащищенный ВА 315M2 — 200 кВт 2975 об/мин IM1081(B3) лапы элмаш
ПОДРОБНЕЕЕще цены и похожие товары
Трехфазный двигатель с коробкой передач, переменный ток 380 В, 60 Вт Редукторный двигатель переменного тока
ПОДРОБНЕЕЕще цены и похожие товары
Низкоскоростной редукторный двигатель, 6 Вт, 0,75-450 об/мин, переменный ток, 110 В, 220 В, коробка-редуктор, индукционный двигатель, регулятор по
ПОДРОБНЕЕЕще цены и похожие товары
12 118
18935
Преобразователь частоты переменного тока 50/60 Гц, однофазный, вход 220 В, трехфазный 380 выход
ПОДРОБНЕЕЕще цены и похожие товары
18 343
22370
Регулятор частоты переменного тока VFD 380, 7, 5 кВт-11 кВт, 3-фазный регулятор скорости, Инверторный двигатель VFD, инвертор
ПОДРОБНЕЕЕще цены и похожие товары
18 982
Редукторный электродвигатель переменного тока 220 В, 250 Вт, редукторный двигатель 6RK250GU-CF с комплектом контроллеров скорости, вал 15 мм, 1350
ПОДРОБНЕЕЕще цены и похожие товары
172392010 Эл. двигатель переменного тока (мотор диспенсера с червячной передачей) CF690
двигатель переменного тока (мотор диспенсера с червячной передачей) CF690
ПОДРОБНЕЕЕще цены и похожие товары
469
939
Конденсатор для двигателя CBB60, 450 в, конденсаторы для водяного насоса, конденсаторы для запуска двигателя в переменного тока, 3 мкФ ф-80 мкФ, 2 шт / набор (2 шт.)
ПОДРОБНЕЕЕще цены и похожие товары
Регулятор оборотов двигателя переменного тока US-52 до 400W
ПОДРОБНЕЕЕще цены и похожие товары
42 377
Двигатель переменного тока 3-х фазный 2-х скоростной для тестомеса, арт. SL3315
ПОДРОБНЕЕЕще цены и похожие товары
2 страница из 18
Синхронные электродвигатели Toshiba на постоянных магнитах. Официальный сайт.
Toshiba с гордостью представляет новые продукты для двигателей низкого напряжения с постоянными магнитами. Учитывая постоянное увеличение законодательного регулирования энергоэффективности, Toshiba предлагает высокоэффективные электродвигатели с постоянными магнитами переменного тока, разработанные для соответствия уровням эффективности IE4 и «Super Premium».
Учитывая постоянное увеличение законодательного регулирования энергоэффективности, Toshiba предлагает высокоэффективные электродвигатели с постоянными магнитами переменного тока, разработанные для соответствия уровням эффективности IE4 и «Super Premium».
В двигателе с постоянными магнитами переменного тока используются редкоземельные неодимовые элементы в конструкции ротора. Благодаря использованию постоянных магнитов, встроенных в конструкцию двигателя переменного тока, двигатель использует одинаковую выходную мощность и высокую плотность крутящего момента с уменьшенными размерами и весом.
Узнать цены или приобрести
Категория: Низковольтные электродвигатели Toshiba
Описание
Типоразмеры и чертежи электродвигателей Toshiba Tosh-ECO™
Листовка
Описание
Синхронные (вентильные) электродвигатели на постоянных магнитах Toshiba поставляются по цене значительно меньшей, чем такие мировые бренды как ABB, Siemens и SEW, при превосходном качестве для ответственных применений. Компания СПИК СЗМА является эксклюзивным партнером Toshiba на рынке России и СНГ.
Компания СПИК СЗМА является эксклюзивным партнером Toshiba на рынке России и СНГ.
Стандартные функции
- полностью закрытый вентилятор
- повышение средней эффективности на 5-8% по сравнению с асинхронными двигателями
- высокая механическая прочность и коррозионная стойкость
- высокий КПД, соответствующий стандарту энергоэффективности IE4 по ГОСТ IEC 60034-30-1-2016
- номинальная частота сети 50 Гц
- номинальное напряжение сети (50 Гц): 400 В
- номинальные скорости (50 Гц): 1800, 3600 и 4500 об./мин.
- трехфазные электродвигатели мощностью 0,37 … 315 кВт
- сервисный фактор (коэффициент перегрузки) 1.0
- конструкция формфакторов 71 — 315 по МЭК 60072-1
- изоляция класса F; Работа с частотными преобразователями, Превосходит требования МЭК 60034-25
- соответствует глобальным стандартным спецификациям, таким как IEC60034, МЭК 60072-1 , ГОСТ Р МЭК 60204-1— 2007
- степень защиты IP55
- отсутствие скольжения, синхронная частота вращения ротора и сети питания, точный контроль скорости и положения ротора
- отсутствие потерь I2R в роторе
- вращающаяся на 90˚ клеммная коробка в верхнем положении (F-3) с двумя точками заземления дополнена пластиковым кабельным вводом и заглушкой
- подходит для высокоскоростной работы до 20%.
 Допускается скорость выше номинальной при постоянной мощности (за пределами максимальной скорости NEMA)
Допускается скорость выше номинальной при постоянной мощности (за пределами максимальной скорости NEMA) - алюминиевый корпус для типоразмеров 71 … 132
- чугунный корпус для типоразмеров 160 … 315
- возможности монтажа в любом положении до типоразмеров меньше 160. Для всех типоразмеров — горизонтальное положение монтажа
- без NAFTA квалификации
 Допускается скорость выше номинальной при постоянной мощности (за пределами максимальной скорости NEMA)
Допускается скорость выше номинальной при постоянной мощности (за пределами максимальной скорости NEMA)
Области применения электродвигателей с постоянными магнитами Tosh-ECO™
- насосы
- вентиляторы
- компрессоры
- конвейеры
Типоразмеры и чертежи электродвигателей Toshiba Tosh-ECO™
| Мощность, кВт | Скорость, об/мин. (50 Гц) | Напряжение, В | Типоразмер | Вес, кг | Номер модели Ссылка на чертеж | Ном. ток, А | КПД, % |
|---|---|---|---|---|---|---|---|
| 0.55 | 3600 | 400 | 71M | 5 | PM1 | 1.2 | 88.0 |
0. 55 55 | 1800 | 400 | 71M | 5 | PM2 | 1.2 | 87.1 |
| 0.75 | 4500 | 400 | 71M | 5 | PM3 | 1.6 | 88.2 |
| 0.75 | 3600 | 400 | 71M | 5 | PM4 | 1.6 | 88.6 |
| 0.75 | 1800 | 400 | 71M | 6 | PM5 | 1.6 | 88.6 |
| 1.1 | 4500 | 400 | 71M | 5 | PM6 | 2.3 | 89.5 |
| 1.1 | 3600 | 400 | 71M | 6 | PM7 | 2.3 | 90.0 |
| 1.1 | 1800 | 400 | 71M | 7 | PM8 | 2.3 | 89.7 |
| 1.5 | 4500 | 400 | 71M | 6 | PM9 | 3.2 | 90.4 |
| 1.5 | 3600 | 400 | 71M | 6 | PM10 | 3.2 | 90.9 |
1. 5 5 | 1800 | 400 | 71M | 7 | PM11 | 3.2 | 89.9 |
| 1.5 | 1800 | 400 | 90L | 11 | PM12 | 3.2 | 90.9 |
| 2.2 | 4500 | 400 | 71M | 7 | PM13 | 4.6 | 91.5 |
| 2.2 | 4500 | 400 | 90L | 11 | PM14 | 4.7 | 90.0 |
| 2.2 | 3600 | 400 | 71M | 7 | PM15 | 4.5 | 91.8 |
| 2.2 | 3600 | 400 | 90L | 11 | PM16 | 4.6 | 91.3 |
| 2.2 | 1800 | 400 | 90L | 13 | PM17 | 4.5 | 91.5 |
| 3 | 4500 | 400 | 90L | 11 | PM18 | 6.4 | 91.2 |
| 3 | 3600 | 400 | 90L | 13 | PM19 | 6.3 | 91. 6 6 |
| 3 | 1800 | 400 | 90L | 15 | PM20 | 6.2 | 91.5 |
| 4 | 4500 | 400 | 90L | 13 | PM21 | 8.3 | 92.0 |
| 4 | 3600 | 400 | 90L | 15 | PM22 | 8.3 | 91.7 |
| 4 | 1800 | 400 | 90L | 18 | PM23 | 8.1 | 92.1 |
| 4 | 1800 | 400 | 112M | 24 | PM24 | 8.1 | 92.2 |
| 5.5 | 4500 | 400 | 90L | 15 | PM25 | 11.5 | 92.6 |
| 5.5 | 3600 | 400 | 90L | 17 | PM26 | 11.2 | 93.0 |
| 5.5 | 3600 | 400 | 112M | 24 | PM27 | 11.3 | 92.2 |
| 5.5 | 1800 | 400 | 112M | 27 | PM28 | 11. 1 1 | 92.8 |
| 7.5 | 3600 | 400 | 112M | 27 | PM29 | 15 | 92.8 |
| 7.5 | 1800 | 400 | 112M | 32 | PM30 | 14.9 | 93.4 |
| 11 | 3600 | 400 | 112M | 32 | PM31 | 22 | 93.6 |
| 11 | 1800 | 400 | 113M | 35 | PM32 | 22 | 93.6 |
| 11 | 1800 | 400 | 132M | 54 | PM33 | 22 | 94.2 |
| 15 | 3600 | 400 | 112M | 35 | PM34 | 29 | 93.9 |
| 15 | 3600 | 400 | 132M | 54 | PM35 | 31 | 94.0 |
| 15 | 1800 | 400 | 132M | 61 | PM36 | 29 | 94.7 |
| 18.5 | 3600 | 400 | 132M | 61 | PM37 | 37 | 94. 3 3 |
| 18.5 | 1800 | 400 | 132M | 68 | PM38 | 36 | 94.8 |
| 22 | 3600 | 400 | 132M | 68 | PM39 | 44 | 94.4 |
| 30 | 3600 | 400 | 132M | 75 | PM40 | 58 | 94.7 |
Листовка
28.2. Управление скоростью двигателя переменного тока
12/12/2014
0 Комментарии
(* в предыдущем параграфе речь шла об управлении двигателями постоянного тока)
Работа двигателей переменного тока основана на явлении вращения магнитного поля, создаваемого набором стационарных обмоток (называемых обмотками статора), питаемых источником переменного тока с разными фазами. Этот эффект похож на поведение мигающих «бегущих огоньков» в гирлянде, которые создают впечатление «движения» в одном направлении. Если наборы обмоток запитать подобным образом (каждая обмотка достигает пика напряженности поля в разное время относительно соседних) то эффект будет похож на движение магнитного поля в одном направлении. Если эти обмотки расположены по кругу, то движущееся магнитное поле будет вращаться вокруг центра этого круга, как это проиллюстрировано следующими изображениями (читайте слева направо и сверху вниз, как будто вы читаете слова в предложении):
Если эти обмотки расположены по кругу, то движущееся магнитное поле будет вращаться вокруг центра этого круга, как это проиллюстрировано следующими изображениями (читайте слева направо и сверху вниз, как будто вы читаете слова в предложении):
Любой намагниченный предмет, помещенный в центр круга, будет пытаться вращаться с той же угловой частотой, что и магнитное поле. Синхронный двигатель переменного тока использует этот принцип, когда его намагниченный ротор движется с точно той же скоростью, что и магнитное поле.
В любом электропроводящем предмете (проводнике), помещенном в центр круга, будет возникать индукция при изменении направления магнитного поля вокруг этого проводника. Поле будет индуцировать электрические токи внутри проводника, которые, в свою очередь, будут действовать против вращающегося магнитного поля таким образом, что предмет будет «гнаться» за полем, всегда чуть отставая. Индукционный двигатель переменного тока работает по этому принципу, когда его ненамагниченный (но электропроводящий) ротор вращается со скоростью немного меньшей, чем синхронная скорость* вращающегося магнитного поля.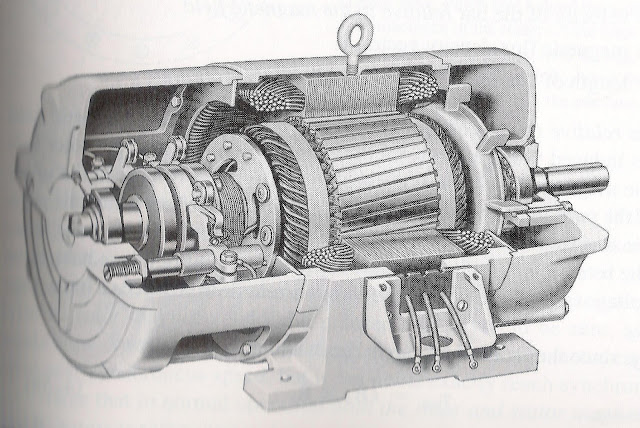
*Разность этих скоростей называется скоростью скольжения, в русскоязычной литературе применяется термин скольжение, определяющий относительную разность.
Скорость вращения магнитного поля прямо пропорциональна частоте источника переменного тока и обратно пропорциональна числу полюсов в статоре:
S = 120f / n
S – синхронная скорость вращающегося магнитного поля в оборотах в минуту
f – частота в герцах
n – число полюсов статора на одно фазу (простейший возможный индукционный двигатель имеет два полюса)
Отношение между синхронной скоростью, частотой и числом полюсов можно понять по аналогии с «бегущими огоньками»: скорость каждого огонька в гирлянде – это функция частоты мигания и числа лампочек на единицу длины. Если число лампочек удвоить, расположив дополнительные лампочки между имеющимися (так чтобы длина гирлянды не изменилась), видимая скорость сократится вдвое: с сокращением расстояния между парами лампочек потребуется больше циклов («миганий») чтобы «пробежать» гирлянду первоначальной длины. Таким же образом, статор с бОльшим числом полюсов на его окружности требует бОльшего числа циклов от источника питания для совершения магнитным полем полного оборота.
Таким же образом, статор с бОльшим числом полюсов на его окружности требует бОльшего числа циклов от источника питания для совершения магнитным полем полного оборота.
Синхронный двигатель переменного тока вращается с точно такой же скоростью, что и магнитное поле: пример из практики – четырехполюсный синхронный двигатель, вращающийся с 1800 оборотами в минуту с приложенным питанием частотой 60 Гц. Индукционный двигатель будет вращаться немного медленней магнитного поля: например, индукционный двигатель вращающийся с 1720 об/мин при питающей частоте 60 Гц (т.е. 80 об/мин – скорость скольжения). Индукционные двигатели проще в производстве и обслуживании, что делает их наиболее популярными из двух типов двигателей, применяемых в промышленности.
В случае когда при производстве статора двигателя число обмоток фиксировано*, частоту источника питания мы можем изменять при помощи электронной схемы. Высокомощная схема, разработанная для изменения частоты питания двигателей переменного тока называется частотным преобразователем (ЧП), а вместе с самим двигателем — частотно-регулируемым приводом (ЧРП).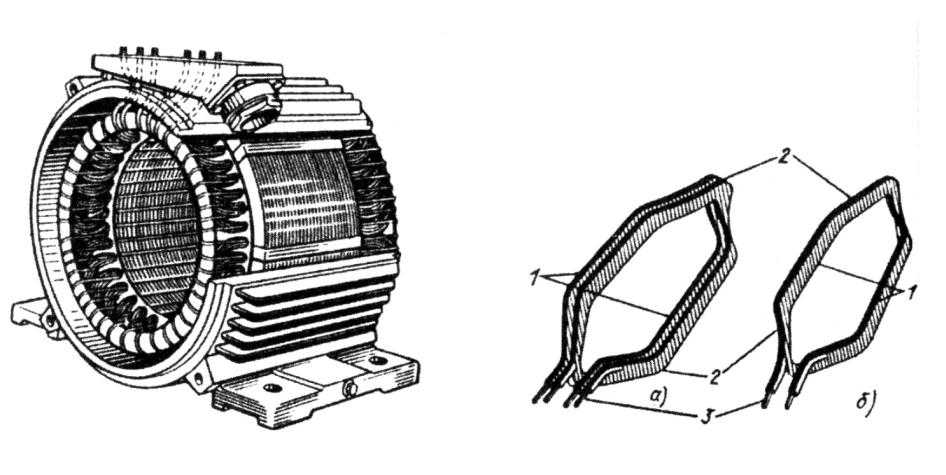
* существуют многоскоростные двигатели с выбираемым числом полюсов. Например, двигатель с дополнительным числом обмоток статора, который подключается по 4-полюсной схеме для высокой скорости, и по 8-полюсной для низкой. Если нормально нагруженный двигатель имеет на «высокой скорости» 1740 об/мин, то на «низкой» в два раза меньше – 870 об/мин. При фиксированной частоте питания этот двигатель будет иметь только две возможные скорости
Частотно-регулируемые приводы крайне полезны, они позволяют обычному двигателю с фиксированным числом полюсов обеспечивать необходимую мощность в широком диапазоне скоростей. К достоинствам ЧРП следует отнести уменьшение электропотребления (двигатель вращается так быстро как это требуется, а не на полную), уменьшение вибрации (меньше скорость=меньше вибрация, хотя существуют и резонансные явления), возможность плавного разгона и торможения для сокращения износа механических составляющих в результате ускоряющих сил.
Другой чертой, присущей большинству частотно-регулируемых приводов является возможность активного торможения нагрузки — это когда ЧРП заставляет двигатель прикладывать отрицательный момент к нагрузке для её замедления. Некоторые частотные преобразователи для энергосбережения позволяют рекуперировать кинетическую энергию в течение процесса торможения.
Некоторые частотные преобразователи для энергосбережения позволяют рекуперировать кинетическую энергию в течение процесса торможения.
Преобразователи частоты содержат электронные компоненты преобразующие входное переменное питание с постоянной частотой в выходное с переменной частотой (и напряжением). В преобразователе обычно имеется три различных блока. Выпрямитель использует диоды для преобразования переменного напряжения в постоянное. Фильтр сглаживает выпрямленное напряжение, т.к. оно имеет пульсации. И наконец, инвертор преобразует отфильтрованное постоянное напряжение обратно в переменное, только на этот раз с уровнями напряжения и частоты необходимыми для желаемой скорости вращения двигателя.
Упрощенная схема для частотного преобразователя показана ниже, выпрямитель слева (преобразует переменное напряжение в постоянное), фильтрующий конденсатор сглаживает выпрямленное напряжение, и транзисторный мост превращает постоянное напряжение в переменное с необходимой частотой*. Схема управления транзисторами опущена для упрощения:
Схема управления транзисторами опущена для упрощения:
*Обратите внимание на обратно-включенные диоды между стоком и истоком каждого из транзисторов. Эти диоды служат для защиты транзисторов от обратного напряжения, но они также позволяют двигателю «возвращать» энергию назад в шину постоянного тока (действуя как генератор) когда скорость вращения двигателя превышает скорость вращения магнитного поля, что может происходить когда привод дает двигателю команду на останов. При добавлении некоторых компонентов это приводит к некоторым интересным возможностям, таким как регенеративное торможение.
Как и в приводах двигателей постоянного тока, силовые транзисторы в частотных преобразователях быстро включаются и отключаются с меняющейся скважностью. Однако в отличии от приводов постоянного тока, переключения силовых транзисторов в преобразователях частоты должны быть очень быстрыми чтобы синтезировать синусоиду переменного тока из постоянного, получаемого с шины после выпрямителя. В электронных схемах приводов постоянного тока скважность ШИМ определяет текущую мощность двигателя, и поэтому она остаётся постоянной пока от двигателя требуется постоянная мощность. Но с частотными преобразователями дела обстоят иначе: коэффициент заполнения (величина, обратная к скважности) должен изменяться от нуля до максимума и обратно до нуля, генерируя таким образом ток синусоидальной формы для работы двигателя.
В электронных схемах приводов постоянного тока скважность ШИМ определяет текущую мощность двигателя, и поэтому она остаётся постоянной пока от двигателя требуется постоянная мощность. Но с частотными преобразователями дела обстоят иначе: коэффициент заполнения (величина, обратная к скважности) должен изменяться от нуля до максимума и обратно до нуля, генерируя таким образом ток синусоидальной формы для работы двигателя.
Соответствие между генерируемым быстроменяющимся ШИМ-сигналом и синусоидой показано на рисунке:
Эта концепция быстро переключающихся в соответствии с ШИМ транзисторов позволяет приводу «нарезать» любые произвольные формы сигналов из отфильтрованного постоянного напряжения, получаемого от выпрямителя. Фактически можно синтезировать любую частоту (сверху ограничена максимальной частотой импульсов ШИМ) и любое напряжение (максимум определяется напряжением шины постоянного тока), что даёт ЧРП работать в широком диапазоне скоростей.
Не смотря на то, что управление частотой – это ключ к управлению скоростью синхронного или индукционного двигателя, самого по себе его не достаточно. В то время как скорость двигателя переменного тока является прямой функцией частоты (она по сути определяет то, как быстро магнитное поле вращается по окружности статора), момент почти пропорционален току в обмотках статора. А поскольку обмотки статора по своей природе являются индуктивностями, то их реактивное сопротивление будет описываться формулой XL=2πfL. Поэтому при росте частоты реактивное сопротивление растет пропорционально. Этот рост реактивного сопротивления в свою очередь приводит к падению тока в статоре (при условии, что напряжение остается постоянным при увеличении частоты). Это может стать причиной чрезмерного падения момента на высоких скоростях или его превышения (а вследствие и перегрева статора!) на низких. По этой причине переменное напряжение приложенное ПЧ к двигателю обычно делают прямо пропорциональным частоте, в результате чего ток в статоре будет оставаться в необходимых рабочих пределах во всём диапазоне скоростей ЧРП. Это соотношение называют «V/F» -, «V/Hz» — отношением, или скалярной характеристикой.
Это соотношение называют «V/F» -, «V/Hz» — отношением, или скалярной характеристикой.
Возьмём в качестве примера ЧРП, запрограммированный на постоянное отношение «V/F». Если на полной скорости (50 Гц) выходное напряжение на двигатель составляет 380 В, тогда выходное напряжение будет равно 190 В на половине скорости (25 Гц), и 95 В на четверти максимальной скорости (12,5 Гц).
ЧРП производятся для управления промышленными двигателями широкого диапазона типоразмеров и мощностей. Некоторые ЧП малы и могут уместиться в вашу руку, другие огромны и для их транспортировки требуются грузовые вагоны. На следующей фотографии показана пара частотников Allen-Bradley среднего размера (около 75 кВт каждый, 1,2 м в высоту), используемых для управления насосами для сточных вод фабрики:
Частотно-регулируемые приводы двигателей переменного тока не требуют обратной связи по скорости, которая необходима приводам для регулирования скорости двигателей постоянного тока. Причина этого очень проста: управляемой переменной в приводах переменного тока является частота питания двигателя, а вращаемые магнитным полем двигатели по своей природе являются частотно-управляемыми машинами.
Причина этого очень проста: управляемой переменной в приводах переменного тока является частота питания двигателя, а вращаемые магнитным полем двигатели по своей природе являются частотно-управляемыми машинами.
Например, четырехполюсный индукционный двигатель, питаемый частотой 60 Гц, имеет номинальную скорость 1728 об/мин (при условии 4% скольжения). Если ЧРП выдает на двигатель переменный ток частотой 30 Гц, то скорость этого двигателя будет приблизительно равна половине номинального значения или 864 об/мин. Двигателю переменного тока действительно не требуется обратная связь от датчика скорости, потому что реальная скорость двигателя всегда будет ограничена выходной частотой привода. Управление частотой – это управление скоростью двигателя для синхронных и индукционных двигателей переменного тока, поэтому обратная связь от тахогенератора не является необходимой для того, чтобы приблизительно* «узнать» как быстро крутится двигатель. Отсутствие необходимости обратной связи по скорости для приводов переменного тока устраняет потенциальную угрозу безопасности, общую для всех приводов постоянного тока: вероятность «выбега» в случае потери приводом сигнала обратной связи от датчика скорости, при котором на двигатель подается полная мощность.
Как и с приводами постоянного тока, цепи ЧРП являются источниками мощного электрического шума. Прямоугольные импульсы, создаваемые быстрыми переключениями силовых полупроводниковых устройств, эквивалентны бесконечным рядам высокочастотных синусоидальных волн (эту эквивалентность, известную как ряды Фурье, математически доказал Жан Батист Жозеф Фурье (1768-1830)), некоторые из которых могут иметь достаточно высокую частоту для самостоятельного распространения в пространстве в виде электромагнитных волн. Эти электромагнитные помехи могут быть довольно интенсивными в случае высокомощных цепей промышленных приводов. По этой причине настоятельно не рекомендуется прокладывать любые силовые моторные кабели или кабели, питающие переменным током схемы приводов, рядом с сигнальными или управляющими проводами, т.к. создаваемый шум будет нарушать работу любых систем, использующих эти низкоуровневые сигналы.
Электромагнитный шум от силовых кабелей переменного тока может быть уменьшен пропусканием переменного тока через цепи низкочастотных фильтров, называемых сетевыми дросселями, расположенных вблизи привода. Эти сетевые дроссели, содержащие катушки индуктивности с ферромагнитными сердечниками, соединенные последовательно с приводом, блокируют высокочастотный шум, не давая ему вернуться назад к источнику переменного тока, где он может оказать влияние на другое электронное оборудование. Меньшее, что может быть сделано с электромагнитным шумом между приводом и двигателем — это экранирование кабелей хорошо заземленным кабелепроводом.
Эти сетевые дроссели, содержащие катушки индуктивности с ферромагнитными сердечниками, соединенные последовательно с приводом, блокируют высокочастотный шум, не давая ему вернуться назад к источнику переменного тока, где он может оказать влияние на другое электронное оборудование. Меньшее, что может быть сделано с электромагнитным шумом между приводом и двигателем — это экранирование кабелей хорошо заземленным кабелепроводом.
0 Комментарии
3419 — Стр 4
4. цилиндра из пластин электротехнической стали насаженных на вал, в пазах находящаяся короткозамкнутая обмотка, петли которой присоединяются к пластинам коллектора.
5. Явнополюсный ротор синхронной машины переменного тока выполняют в
виде:
1.цилиндра из пластин электротехнической стали насаженных на вал, в пазах находящаяся обмотка в виде беличьей клетки;
2.цилиндра из пластин электротехнической стали насаженных на вал, в пазах находящейся обмотки из провода, соединенные по звезде, концы выведены на контактные кольца;
3. цилиндра из пластин электротехнической стали насаженных на вал, в пазах находящейся обмотки из провода, концы выведены на 2 контактных кольца;
цилиндра из пластин электротехнической стали насаженных на вал, в пазах находящейся обмотки из провода, концы выведены на 2 контактных кольца;
4.стального обода, насаженного на вал, по наружной сторон которого, прикреплены полюсные наконечники из пластин электротехнической стали, обмотки выведены на 2 контактных кольца.
6.Явнополюсный ротор применяют в синхронных машинах переменного тока:
1.большой мощности;
2.высокой частоты вращения;
3.низкой частоты вращения;
4.малой мощности.
7.Неявнополюсный ротор применяют в синхронных машинах переменного тока:
1.большой мощности;
2.высокой частоты вращения;
3.низкой частоты вращения;
4.малой мощности.
8.При заданной частоте напряжение холостого хода синхронного генератора будет зависеть от:
1.активного сопротивления якорной обмотки;
2.полного сопротивления якорной обмотки;
3.реакции якоря;
4.тока возбуждения.
9.Влияние МДС якоря генератора на основную МДС называют:
1. реакцией якоря;
реакцией якоря;
2.коммутацией;
3.регулировочной характеристикой;
4.внешней характеристикой.
10.При идеально активной нагрузке синхронного генератора его внешняя характеристика будет:
1.возрастающей;
2.постоянной;
3.слабо убывающей;
4.сильно убывающей.
11.При активно-емкостной нагрузке синхронного генератора его внешняя характеристика будет:
1.возрастающей;
2.постоянной;
3.слабо убывающей;
4.сильно убывающей.
12.При активно-индуктивной нагрузке синхронного генератора его внешняя характеристика будет:
1.возрастающей;
2.постоянной;
3.слабо убывающей;
4.сильно убывающей.
13.Зависимость напряжения синхронного генератора от тока нагрузки при заданной частоте и токе возбуждения называется:
1.характеристикой холостого хода;
2.внешней характеристикой;
3.регулировочной характеристикой;
4.механической характеристикой.
14.Зависимость ЭДС синхронного генератора от тока возбуждения при заданной частоте называется:
1. характеристикой холостого хода;
характеристикой холостого хода;
2.внешней характеристикой;
3.регулировочной характеристикой;
4.механической характеристикой.
15.Величина крутящего момента на валу синхронного двигателя переменного
тока:
1.прямо пропорциональна напряжению сети;
2.прямо пропорционально квадрату напряжения сети;
3.обратно пропорциональна напряжению сети;
4.обратно пропорционально квадрату напряжения сети.
16.Максимальный кутящий момент синхронного двигателя не будет зависеть от:
1.напряжения сети;
2.тока возбуждения;
3.сопротивления якорных обмоток;
4.угловой характеристики.
17.Процесс параллельного включения синхронного генератора в сеть большой мощности называют:
1.коммутацией;
2.синхронизацией;
3.шунтированием;
4.реверсированием.
18.Если угловая характеристика синхронного двигателя будет больше 900 то
двигатель:
1.остановится;
2.будет вращаться не синхронно;
3.будет работать с перегрузкой;
4. перейдет в режим электротормоза.
перейдет в режим электротормоза.
19.При отсутствии сдвига фазы между напряжением и ЭДС синхронной машины переменного тока она может выступать в роли:
1.автотрансформатора;
2.электротормоза;
3.фазорегулятора;
4.компенсатора реактивной мощности.
20.В недовозбужденном состоянии синхронный двигатель переменного тока:
1.не потребляет мощность из сети;
2.потребляет только активную мощность;
3.потребляет активно – индуктивную мощность;
4.потребляет активно – емкостную мощность.
21.В перевозбужденном состоянии синхронный двигатель переменного тока:
1.не потребляет мощность из сети;
2.потребляет только активную мощность;
3.потребляет активно–индуктивную мощность;
4.потребляет активно-емкостную мощность.
22.Синхронные двигатели рассчитывают на работу в режиме:
1.идеально активной нагрузки;
2.недовозбуждения при cos =0,8;
3.перевозбуждения при cos =0,8;
4.перевозбуждения при cos =0,4.
23.Синхронные микромашины 3-х фазного тока бывают:
1.реактивные и гистерезисные;
2.реактивные и фазные;
3.гистерезисные и фазные;
4.активные и коллекторные.
24.Синхронная 3-х фазная микромашина с ротором, возбуждающимся за счет индуктивной составляющей тока статора называется:
1.фазной;
2.коллекторной ;
3.гистерезисной;
4.реактивной.
25.Синхронная микромашина, выполненная с ротором в виде тонкостенного цилиндра из магнитотвердого материала, насаженного на втулку называется:
1.фазной;
2.коллекторной ;
3.гистерезисной;
4.реактивной.
26.В малогабаритном оборудовании с постоянной частотой вращения привода используются:
1.синхронные микромашины;
2.асинхронные микромашины;
3.машины постоянного тока;
4.коллекторные машины переменного тока.
27.Синхронные машины получили распространение в оборудовании:
1.с постоянной частотой вращения;
2.с высоким пусковым моментом;
3. с широким пределом регулирования частоты вращения;
с широким пределом регулирования частоты вращения;
4.с мягкой механической характеристикой.
28.Наиболее широкое применение синхронные машины получили в качестве:
1.генераторов постоянного тока;
2.генераторов переменного тока;
3.двигателей систем автоматики;
4.двигателей подъемно-транспортных механизмов.
ТЕМА 7. МАШИНЫ ПОСТОЯННОГО ТОКА.
1.Цель работы: изучить принцип действия и устройство машин постоянного
тока.
2.Вопросы для самостоятельного изучения темы.
1.Устройство электрической машины постоянного тока.
2.Принцип действия электрической машины постоянного тока.
3.Работа электрической машины постоянного тока в режиме генератора.
4.Генераторы с независимым возбуждением.
5.Генераторы с самовозбуждением. Принцип самовозбуждения генератора с параллельным возбуждением.
6.Характеристики генераторов.
7.Работа электрической машины постоянного тока в режиме двигателя. Основные уравнения.
8. Механические характеристики электродвигателей постоянного тока.
Механические характеристики электродвигателей постоянного тока.
3. Тестовые задания к теме
1.Статор машины постоянного тока выполняют в виде:
1.полого цилиндра, набранного из пластин электротехнической стали с пазами для обмоток расположенных с внутренней стороны цилиндра;
2.полого литого цилиндра с пазами для трех фазных обметок;
3.полого литого цилиндра с внутренней стороны которого закреплены полюсные наконечники, набранные из пластин электротехнической стали;
4.полого цилиндра, набранного из пластин электротехнической стали с литыми полюсными наконечниками закрепленными с внутренней стороны.
2.Ротор машины постоянного тока выполняют в виде:
1.цилиндра из пластин электротехнической стали насаженных на вал, в пазах находящаяся обмотка в виде беличьей клетки;
2.цилиндра из пластин электротехнической стали насаженных на вал, в пазах находящейся обмотки из провода, соединенные по звезде, концы выведены на контактные кольца;
3.цилиндра из пластин электротехнической стали насаженных на вал, в пазах находящейся обмотки из провода, концы выведены на 2 контактных кольца;
4. цилиндра из пластин электротехнической стали насаженных на вал, в пазах находящаяся короткозамкнутая обмотка, петли которой присоединяются к пластинам коллектора.
цилиндра из пластин электротехнической стали насаженных на вал, в пазах находящаяся короткозамкнутая обмотка, петли которой присоединяются к пластинам коллектора.
3.В генераторе постоянного тока коллекторно-щеточный механизм необходим
для:
1.синхронизации машины;
2.улучшения коммутации;
3.выпрямления тока;
4.сохранения постоянства крутящего момента.
4.В двигателях постоянного тока коллекторно-щеточный механизм необходим
для:
1.синхронизации машины;
2.улучшения коммутации;
3.выпрямления тока;
4.сохранения постоянства крутящего момента.
5.Добавочные полюса в машинах постоянного тока устанавливают для:
1.синхронизации машины;
2.улучшения коммутации;
3.выпрямления тока;
4.сохранения постоянства крутящего момента.
6.Оптимальные условия эксплуатации машины постоянного тока достигаются когда щетки находятся:
1.на физической нейтрали;
2.на магнитной нейтрали;
3.в плоскости главных полюсов;
4. в плоскости добавочных полюсов.
в плоскости добавочных полюсов.
7.В магнитопроводе ротора машины постоянного тока магнитное поле будет:
1.постоянным;
2.пульсирующим;
3.вращающимся;
4.частично вращающимся.
8.Генератор постоянного тока, обмотка возбуждения которого подключена к цепи управления называется:
1.генератором частоты;
2.регулятором фазы;
3.электромашинным усилителем;
4.гистерезисным двигателем.
9.К недостатка электромашинных усилителей относят:
1.низкую выходную мощность;
2.низкий коэффициент усиления на больших мощностях;
3.инерционность цепи усиления;
4.большое выходное сопротивление.
10.Электромашинные усилители мощности имеют коэффициент усиления:
1.меньше 1;
2.20-200;
3.200-2000;
4.2000-20000.
11.Величина ЭДС генератора постоянного тока не зависит от:
1.конструкции;
2.сопротивления якоря;
3.частоты вращения ротора;
4.величины магнитного потока.
12.Для работы генератора постоянного тока на самовозбуждении необходимо:
1. отсутствие нагрузки;
отсутствие нагрузки;
2.наличие остаточного магнитного потока;
3.параллельная схема возбуждения;
4.последовательная схема возбуждения.
13.Тип внешней характеристики генератора постоянного тока будет зависеть от:
1.частоты вращения;
2.схемы возбуждения;
3.сопротивления обмоток;
4.остаточного магнитного потока.
14.В якоре двигателя постоянного тока напряжение сети уравновешивается суммой противо-ЭДС и:
1.активного падения напряжения в цепи якоря;
2.индуктивного падения напряжения в цепи якоря;
3.емкостного падения напряжения в цепи якоря;
4.падения напряжения на полном сопротивлении цепи якоря.
15.При увеличении тока возбуждения двигателя постоянного тока его частота вращения будет:
1.оставаться неизменной;
2.линейно возрастать;
3.линейно убывать;
4.убывать по функции .
16.Величина крутящего момента двигателя постоянного тока пропорциональна:
1.току якоря и частоте вращения ротора;
2. току якоря и магнитному потоку;
току якоря и магнитному потоку;
3.магнитному потоку и частоте вращения ротора;
4.магнитному потоку и противо-ЭДС якоря.
17.Основное назначение реостата в цепи якоря двигателя постоянного тока это:
1.изменение частоты вращения;
2.изменение момента на валу;
3.улучшение условий пуска;
4.увеличение КПД.
18.Основное назначение реостата в цепи возбуждения двигателя постоянного
тока это:
1.изменение частоты вращения;
2.изменение момента на валу;
3.улучшение условий пуска;
4.увеличение КПД.
19.Кратность пускового тока к номинальному для двигателей постоянного тока находится в пределах:
1.1-2;
2.4-6;
3.5-7;
4.10-20.
20.Магнитные потери машин постоянного тока складываются из потерь в:
1.станине, полюсных наконечниках и якоре;
2.станине и якоре;
3.наконечниках и якоре;
4.и полюсных наконечниках.
21.Не бывает включения генератора постоянного тока с независимым возбуждением по:
1. параллельной схеме;
параллельной схеме;
2.последовательной схеме;
3.смешанной схеме;
4.схеме.
22.Обрыв цепи возбуждения в двигателе постоянного тока с параллельным возбуждением при холостом ходе приведет к:
1.двигателе;
2.недопустимому разгону двигателя;
3.замыканию цепи якоря;
4.возрастанию крутящего момента на валу.
23.Двигатели постоянного тока с последовательным возбуждением не используют на холостом ходу из-за:
1.остановке двигателе;
2.недопустимому разгону двигателя;
3.короткому замыканию цепи якоря;
4.возрастанию крутящего момента на валу.
24.Момент на валу двигателя постоянного тока с последовательным возбуждением будет пропорционален:
1.току якоря;
2.квадрату тока якоря;
3.току возбуждения;
4.частоте вращения якоря.
25.Механическая характеристика двигателя постоянного тока с последовательным возбуждением будет:
1.возрастающей;
2.абсолютно жесткой;
3.жесткой;
4.мягкой.
26.В машинах постоянного тока за счет совместного применения последовательного и параллельного возбуждения можно получить:
1.возрастающую внешнюю характеристику;
2.убывающую внешнюю характеристику;
3.неизменную внешнюю характеристику;
4.практически любую внешнюю характеристику.
27.В машинах постоянного тока за счет совместного применения последовательного и параллельного возбуждения можно получить:
1.мягкую механическую характеристику;
2.абсолютно жесткую механическую характеристику;
3.жесткую механическую характеристику;
4.практически любую внешнюю кроме абсолютно жесткой.
28.Для изменения направления вращения в коллекторной машине необходимо:
1.поменять порядок чередования фаз;
2.отключить обмотку возбуждения;
3.поменять полярность включения якоря и индуктора;
4.поменять полярность включения либо якоря, либо индуктора.
29.В коллекторных машинах переменного тока из пластин электрической стали изготавливают:
1. магнитопровод статора, а ротор – сплошной;
магнитопровод статора, а ротор – сплошной;
2.магнитопровод ротора, а статор – сплошной;
3.весь магнитопровод, кроме корпуса станины;
4.весь магнитопровод.
30.В коллекторных машинах переменного тока фазосдвигающие элементы используют:
1.в цепи якоря;
2.в цепи индуктора;
3.в цепи якоря и индуктора;
4.не применяют.
31.В коллекторных машинах переменного тока в цепи индуктора используют фазосдвигающий элемент для:
1.сдвига в пространстве магнитных полей якоря и индуктора;
2.увеличения сдвига фазы между напряжением на якоре и индукторе;
3.уменьшением сдвига фазы между напряжением на якоре и индукторе;
4.уменьшение сдвига фазы между током в якоре и индукторе.
32.Добавочные полюса в коллекторных машинах применяют для:
1.компенсации реакции якоря;
2.компенсации реакции индуктора;
3.уменьшения основного магнитного потока;
4.увеличения основного магнитного потока.
33.В коллекторных машинах переменного тока коммутация значительно хуже чем в машинах постоянного тока из-за:
1. ЭДС от вращения якоря;
ЭДС от вращения якоря;
2.ЭДС реакции якоря;
3.ЭДС от дополнительных полюсов;
4.трансформаторной ЭДС.
34.Основным недостатком коллекторных машин переменного тока является:
1.низкий пусковой момент;
2.мягкая механическая характеристика;
3.плохое регулирование режимов работы;
4.плохие условия коммутации.
35.В коллекторных машинах переменного тока в отличие от постоянного, в якоре используют меньшее количество витков для:
1.уменьшения крутящего момента;
2.уменьшения реакции якоря;
3.увеличения тока якоря;
4.уменьшение трансформаторной ЭДС.
36.В секции якоря в коллекторных машинах переменного тока вводят дополнительные резисторы для:
1.уменьшения крутящего момента;
2.уменьшения реакции якоря;
3.уменьшение трансформаторной ЭДС;
4.улучшения коммутации.
37.В электрический привод не входит:
1.электродвигатель;
2.передаточный механизм связывающий двигатель и потребитель;
3. аппаратура управления двигателем;
аппаратура управления двигателем;
4.генератор электрической энергии.
38.Электропривод, при котором каждая машина приводится во вращение своим двигателем, называется:
1.групповым;
2.одиночным;
3.многодвигательным;
4.трансмиссионным.
39.Электропривод, при котором группа машин приводится во вращение одним двигателем, называется:
1.передаточным;
2.одиночным;
3.многодвигательным;
4.трансмиссионным.
40.Электропривод, в котором для привода различных частей одной машины используют одиночные двигатели, называется:
1.групповым;
2.одиночным;
3.многодвигательным;
4.трансмиссионным.
41.Статическая нагрузка на валу двигателя зависит от:
1.нагрузки на рабочий механизм;
2.веса всех движущихся частей связанных с валом двигателя;
3.геометрических размеров рабочего механизма;
4.ускорения вала двигателя.
42 Динамический момент на валу двигателя не будет зависеть от:
1.нагрузки на рабочий механизм;
2. веса всех движущихся частей связанных с валом двигателя;
3.геометрических размеров рабочего механизма;
4.ускорения вала двигателя.
43.При установившемся режиме работы электропривода динамический момент на валу двигателя:
1.меньше нуля;
2.больше нуля;
3.равен нулю;
4.равен статическому.
44.Номинальная мощность двигателя для электропривода, работающего при длительной нагрузке, выбирается по:
1.допустимому нагреву двигателя;
2.продолжительности включения;
3.перегрузочной способности;
4.пусковому моменту.
45.Мощность двигателя выбранного для электропривода может быть скорректирована исходя из:
1.допустимому нагреву двигателя;
2.продолжительности включения;
3.перегрузочной способности;
4.пусковому моменту.
46.Выбранный для электропривода двигатель проверяют исходя из:
1.условий допустимого нагрева;
2.величины среднего тока двигателя;
3.величины средней мощности потребляемой из сети двигателем;
4. максимального и пускового моментов.
47.Универсальным, применимым для всех типов, является метод подбора мощности привода по:
1.методу средних потерь;
2.методу эквивалентных токов;
3.методу эквивалентных мощностей;
4.методу эквивалентных моментов.
48.На основе допущения о том, что механические потери, потери в стали и активное сопротивление обмоток не зависит от нагрузки можно для подбора двигателя электропривода использовать метод:
1.средних потерь;
2.эквивалентных токов;
3.эквивалентных мощностей;
4.эквивалентных моментов.
49.На основе допущения о постоянстве магнитного потока машины и его независимости от нагрузки можно для подбора двигателя для электропривода использовать метод:
1.средних потерь;
2.эквивалентных токов;
3.эквивалентных мощностей;
4.эквивалентных моментов.
50.На основе допущения о абсолютной жесткости механической характеристики двигателя можно для подбора двигателя для электропривода использовать метод:
1. средних потерь;
2.эквивалентных токов;
3.эквивалентных мощностей;
4.эквивалентных моментов.
51.Режим работы двигателя считается длительным если его продолжительность включения составляет:
1.40%;
2.60%;
3.80%;
4.90%.
52.Режим работы двигателя считается повторно-кратковременным если:
1.время цикла меньше 10 минут и продолжительность включения меньше 60% от времени цикла;
2.продолжительность включения меньше 40%;
3.число включений в час больше паспортного;
4.за время работы двигатель не нагревается до постоянной температуры.
53.Кратковременным режим работы двигателя считается если:
1.время цикла меньше 10 минут и продолжительность включения меньше 60% от времени цикла;
2.продолжительность включения меньше 40%;
3.число включений в час больше паспортного;
4.за время работы двигатель не нагревается до постоянной температуры. 54.Не существует стандартной продолжительности включения двигателя равной:
1. 15%;
2.25%;
3.40%;
4.80%.
55.Допустимое число включений в час при выборе электродвигателя не будет зависеть от:
1.кратности пускового и номинального тока;
2.времени пуска;
3.фактической продолжительности включения;
4.кратности пускового и номинального момента.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Основная литература
1. Славинский А. К. Электротехника с основами электроники [Электронный ресурс]: рек. Министерством образования и науки РФ в качестве учебного пособия для студентов образовательных учреждений среднего образования / А.К. Славинский, И.С. Туревский. — М.: ИД ФОРУМ: НИЦ ИНФРА-М, 2015. — 448 с. — ЭБС «Знаниум».
Дополнительная литература
1. Кузовкин, В. А. Электротехника и электроника [Электронный ресурс] : рек. УМО среднего профессионального образования в качестве учебника для студентов СПО / В. А. Кузовкин, В. В. Филатов. — М. : Издательство Юрайт, 2016. — 431 с. — ЭБС Юрайт.
Синхронные двигатели, прямой привод, реверсивный синхронный двигатель
Показать только в наличии
Синхронные двигатели представляют собой распространенный вид электродвигателей, питаемых переменным током. У нас в Allied Electronics есть сотни вариантов на выбор, и мы являемся главным авторизованным дистрибьютором компонентов в Северной Америке, поэтому вы можете быть уверены, что мы сможем поставить детали, подходящие для вашего проекта.
У нас есть синхронные двигатели от ряда ведущих производителей, включая Siemens, Schneider Electric и Crouzet, и вы можете быть уверены, что все детали соответствуют самым высоким отраслевым стандартам.
Читайте дальше, чтобы узнать больше о синхронных двигателях, их различных типах, для каких областей применения они наиболее подходят и почему вы можете положиться на Allied Electronics в предоставлении необходимых вам компонентов.
Что такое синхронные двигатели и как они работают?
Как и все электродвигатели, синхронные двигатели преобразуют электрическую энергию в механическую. Для этого вал двигателя вращается со скоростью, синхронизированной с частотой подаваемого переменного тока. Создаваемое магнитное поле помогает генерировать крутящий момент, который обеспечивает движение приложения.
Синхронные двигатели отличаются от асинхронных тем, что они вращаются с той же скоростью, что и частота сети. Однако в асинхронных двигателях магнитное поле ротора вращается немного медленнее, чем поле статора.
Какие существуют типы синхронных двигателей?
Существует несколько различных типов синхронных двигателей, и в целом их можно разделить на реактивные, с постоянными магнитами и с гистерезисом.
- Реактивные двигатели имеют зубья на роторе, которые фиксируются и позволяют ему вращаться с той же скоростью, что и магнитное поле.
- Как следует из названия, синхронные двигатели с постоянными магнитами имеют магниты, встроенные в ротор, которые создают постоянно присутствующее магнитное поле. Двигатели с прямым приводом представляют собой разновидность синхронных двигателей с постоянными магнитами. В них меньше движущихся частей, что повышает эффективность и срок службы компонента.
- Гистерезисные двигатели имеют гладкий ротор из высокоуглеродистой стали, который можно намагничивать и размагничивать. Синхронные двигатели с гистерезисом, как правило, используются в приложениях с низкой номинальной мощностью.
Где используются синхронные двигатели?
Двигатели с прямым приводом и другие синхронные двигатели чаще всего используются в приложениях, где важны точность и точность синхронизации. Некоторые повседневные примеры из них включают аналоговые часы, магнитофоны и таймеры.
Почему для синхронных двигателей выбирают Allied Electronics?
Независимо от того, обращаетесь ли вы в Allied Electronics за синхронными двигателями или любыми другими компонентами, будьте уверены, что у нас есть только продукция самого высокого качества, отвечающая отраслевым стандартам. У нас есть синхронные двигатели от таких компаний, как Siemens, Nidec Motors и Schneider Electric, и, как ведущий авторизованный дистрибьютор в Северной Америке, вы можете рассчитывать на то, что мы доставим то, что вам нужно, и когда вам это нужно.
Для двигателей с прямым приводом и других сопутствующих товаров обращайтесь в Allied Electronics. Если у вас есть какие-либо вопросы, пожалуйста, свяжитесь с нами, и мы сделаем все возможное, чтобы указать вам правильное направление. Кроме того, вы также можете найти множество полезных советов и советов в нашем экспертном центре.
Автоматические выключатели, предохранители и защита
(139126 результатов)
Соединители
(228562 результатов)
Электронные компоненты
(261651 результатов)
Корпуса, стойки и шкафы
(42111 результатов)
Удобства, уборка и техническое обслуживание
(22798 результатов)
Вентиляторы и управление температурным режимом
(11891 результатов)
Промышленные средства управления
(195399 результатов)
Промышленная передача данных
(10320 результатов)
Освещение и индикация
(37444 результатов)
Двигатели и средства управления двигателем
(42770 результатов)
ПЛК и HMI
(Результаты: 9801)
Пневматика и контроль жидкости
(389205 результатов)
Энергетические продукты
(35485 результатов)
Raspberry Pi, Arduino и средства разработки
(2900 результатов)
Реле
(26866 результатов)
Датчики
(121286 результатов)
Переключатели
(135173 результатов)
Испытания и измерения
(11953 результатов)
Инструменты и оборудование
(Результаты: 91830)
Провод и кабель
(116612 результатов)
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В перем. тока при 60 Гц, 7 Вт, 4 об/мин, 218 унций на дюйм при 175 л.с./с, 0,68, T
Произв. Деталь №: 2602-012
Товарный номер союзника: 70030121
В наличии:
73
+1
$168,52
/ шт.
+3
$154,49
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В перем. тока при 60 Гц, 7 Вт, 6 об/мин, 210 унций на дюйм при 175 п/с, 0,68, T
Производитель Деталь №: 2602-013
Товарный номер союзника: 70030122
В наличии:
39
+1
227,89 долларов США
/ шт.
+3
$ 217,07
/ шт.
+5
199,70 долларов США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В перем. тока при 60 Гц, 7 Вт, 10 об/мин, 180 унций на дюйм при 175 имп/с, 0,68, T
Производитель Деталь №: 2602-006
Товарный номер союзника: 70030123
В наличии:
75
+1
$161,13
/ шт.
+3
152,34 доллара США
/ шт.
+5
139,64 доллара США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В переменного тока при 60 Гц, 10 Вт, 60 об/мин, 41 унция/дюйм при 175 имп/с, 0,82, 10
Производитель Деталь №: 3204-024
Товарный номер союзника: 70030129
В наличии:
150
При заказе:
100
+1
$118,08
/ шт.
+3
$111,63
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, A, 300 об/мин, 115 В переменного тока, 3 Вт, крутящий момент 2 унции дюйма
Производитель Артикул №: 3001-001
Товарный номер союзника: 70259512
В наличии:
8
+1
$53,94
/ шт.
+3
52,26 доллара США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронизация, прямой привод, Mod T, 60 мм, 300 об/мин, 115 В переменного тока, 7 Вт, крутящий момент 8,5 (унция-дюйм)
Производитель Деталь №: 2601-001
Товарный номер союзника: 70274604
В наличии:
22
При заказе:
50
+1
$244,03
/ шт.
+3
231,81 долл. США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, модель серии LYG35
Производитель Деталь №: LYG35115F70P
Allied Stk №: 70672866
В наличии:
0
+1
$111,86
/ шт.
+3
$106,92
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, Синхронный, Прямой привод, 59мм, 600 об/мин, 115 В переменного тока при 60 Гц, крутящий момент 5,5 унций на дюйм
Производитель Номер по каталогу: 3203-001
Товарный номер союзника: 70228537
В наличии:
1
При заказе:
3
+1
$134,71
/ шт.
+3
128,75 долларов США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, прямой привод, 49 мм, синхронизация, 600 об/мин, 115 В переменного тока, 5 Вт, крутящий момент 2,3, AB
Производитель Деталь №: 3005-001
Товарный №: 70238557
В наличии:
16
+1
$89,81
/ шт.
+3
$85,67
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнивать не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, 42 мм, 300 об/мин, 24 В переменного тока при 60 Гц, крутящий момент 4 унции дюйма, 4 Вт
Производитель Деталь №: LYD42024D
Allied Stk №: 70030209
В наличии:
9
+1
20,63 доллара США
/ шт.
+3
19,61 доллара США
/ шт.
+5
$18,63
/ шт.
+25
17,70 долларов США
/ шт.
больше
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, PA, 59 мм, 300 об/мин, 115 В переменного тока, крутящий момент 8,5 унций дюйма
Производитель Деталь №: 3201-001
Товарный №: 70249982
В наличии:
6
+1
$135,43
/ шт.
+3
129,19 долларов США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, 42 мм, 300 об/мин, 115 В переменного тока при 60 Гц, крутящий момент 4 унции дюйма, 4 Вт
Производитель Деталь №: LYD42115D
Allied Stk №: 70030186
В наличии:
23
+1
29,54 доллара США
/ шт.
+3
28,23 доллара США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Крузе
Синхронный реверсивный двигатель переменного тока, 1 об/мин, 240 В
Производитель Номер по каталогу: 80547020
Товарный номер: 70520293
В наличии:
1
1
336,45 долларов США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В перем. тока при 60 Гц, 5 Вт, 12 об/мин, 73 унции/дюйм при 175 имп/с, 0,5, 50
Производитель Деталь №: 3006-005
Товарный №: 70030116
В наличии:
0
1
$163,99
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В перем. тока при 60 Гц, 5 Вт, 20 об/мин, 44 унции/дюйм при 175 имп/с, 0,5, 30
Производитель Деталь №: 3006-007
Товарный №: 70030117
В наличии:
0
+1
165,29 долларов США
/ шт.
+3
157,99 долларов США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В переменного тока, 60 Гц, 5 Вт, 10 об/мин, 88 унций на дюйм, 175 л.с./с, 0,5
Производитель Деталь №: 3006-004
Товарный номер союзника: 70030190
В наличии:
0
+1
$155,27
/ шт.
+3
148,42 доллара США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, 55 мм, 250/300 об/мин, 115 В переменного тока при 60 Гц
Производитель Деталь №: LYD55T115DS
Allied Stk #: 70030188
В наличии:
0
+1
$51,36
/ шт.
+3
49,08 долларов США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, PB, 59мм, 500 об/мин, 230 В переменного тока, крутящий момент 6,6 унции дюйма
Производитель Деталь №: 3203-007
Товарный №: 70249988
В наличии:
0
+1
$145,06
/ шт.
+3
138,65 долларов США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Найдек Моторс)
Двигатель, синхронный, прямой привод, 35 мм, 300 об/мин, 115 В переменного тока при 60 Гц, крутящий момент 1,5 унции дюйма
Производитель Деталь №: LYD35115D
Allied Stk №: 70030208
В наличии:
2
+1
24,96 доллара США
/ шт.
+3
23,85 доллара США
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, 55 мм, 24 В переменного тока, 300 об/мин, 5 Вт, крутящий момент 6,5 унций дюйма
Производитель Деталь №: LYD55T024DL
Allied Stk №: 70245259
В наличии:
95
1
$36,33
/ шт.
ДОБАВИТЬ В КОРЗИНУ
ОБНОВИТЬ КОРЗИНУ
0 сейчас в корзине
Ошибка при обновлении корзины
Показано 20
из 1201 результата
Синхронный асинхронный двигатель | Вопросы для собеседования по электротехнике
В приложениях, требующих высокого пускового момента и постоянной скорости, можно использовать синхронные асинхронные двигатели. Он имеет преимущества как синхронных, так и асинхронных двигателей. Синхронный двигатель обеспечивает постоянную скорость, тогда как асинхронные двигатели могут запускаться при полной нагрузке.
Рассмотрим обычный асинхронный двигатель с контактными кольцами, имеющий трехфазную обмотку на роторе, как показано на рис. 1.
Первоначально он работает как асинхронный двигатель с контактными кольцами с помощью пусковых сопротивлений. Когда сопротивление отключено, двигатель работает с проскальзыванием. Теперь соединения меняются, и возбудитель подключается последовательно с обмотками ротора, которые остаются в цепи постоянно. Двигатель подключается к возбудителю, который дает постоянный ток. подача к двигателю через токосъемные кольца. Одна фаза несет полный постоянный ток. ток, в то время как два других несут половину полного постоянного тока. тока, так как они включены параллельно. В связи с этим d.c. возбуждения, на роторе образуются постоянные полюса (N и S).
Поскольку двигатель работает как асинхронный двигатель, первоначально может быть создан высокий пусковой момент (до двойного значения полной нагрузки). Когда постоянный ток возбуждение при условии, что он приводится в синхронизм и начинает работать с постоянной скоростью. Синхронный асинхронный двигатель обеспечивает постоянную скорость, большой пусковой момент, низкий пусковой ток и коррекцию коэффициента мощности.
Возможно, что переменный ток обмотка надевается на ротор, а d.c. возбуждение осуществляется на статоре. Это упрощает управление механизмом. Это также дает лучшие возможности для изоляции, что позволяет использовать более высокие напряжения и более низкий постоянный ток. возбуждения.
Постоянный ток обмотка должна быть рассчитана таким образом, чтобы давать высокие м.д.с. с умеренным постоянным током мощность возбуждения. Потери возбуждения должны быть равномерно распределены по обмотке. Распределение mmf должно быть почти синусоидальным. Он также должен обеспечивать демпфирование вибраций и должен удовлетворительно запускаться как асинхронный двигатель.
Когда машина работает как асинхронный двигатель, в роторе индуцируются переменные токи, и скорость вращения ниже синхронной. Когда ротор несет постоянный ток. токи в роторе, и он работает ниже синхронной скорости. Когда ротор несет постоянный ток. токи поля ротора и, следовательно, ротор должен работать на синхронной скорости. Это означает, что скольжение должно быть сведено к нулю. Но если есть какое-либо отклонение от этой скорости при нормальной работе, то в роторе снова возникают наведенные токи. Ротор имеет низкое сопротивление, поэтому его обмотки действуют как демпфирующие обмотки. Следовательно, не требуются отдельные демпфирующие обмотки.
При возбуждении постоянным током быстро устанавливается синхронизирующий момент. Величина этого крутящего момента равна T м sinθ, где θ — угол между полем статора и ротора. В дополнение к этому также присутствует крутящий момент асинхронного двигателя, который пропорционален скольжению (dθ/dt), если скольжение мало. Также может быть постоянный крутящий момент нагрузки, если он запускается под нагрузкой, и, наконец, для ускорения ротора требуется крутящий момент J (d 2 θ/d 2 t).
Можно видеть, что θ<π, пока синхронизирующий момент действует в направлении, противоположном направлению момента нагрузки, что имеет тенденцию уменьшать угловую скорость dθ/dt движения скольжения. когда π<θ<2π, тогда синхронизирующий крутящий момент действует в сочетании с крутящим моментом нагрузки, увеличивая скольжение, то есть ничего, кроме угловой скорости dθ/dt, и двигатель не синхронизируется.
Поскольку движение скольжения неравномерно, двигатель подвергается механическим нагрузкам. Также могут быть колебания тока и коэффициента мощности. Следовательно, желательно, чтобы двигатель синхронизировался как можно быстрее после переключения постоянного тока. возбуждение. Это требует, чтобы синхронизирующий момент был значительно больше, чем момент нагрузки, и он должен быть противоположен моменту нагрузки. Угол, полученный в момент переключения d.c. возбуждение также влияет на втягивание в шаг. На следующих рисунках представлены осциллограммы тока ротора при приложении возбуждения для различных значений θ. Когда возбуждение задерживается более чем на 60 o видно, что ротор не синхронизируется, так как крутящий момент асинхронного двигателя и синхронизирующий крутящий момент работают совместно, и крутящий момент будет иметь пульсирующее значение.
Таким образом, двигатель может быть переведен в синхронизм, если возбуждение применяется в положении, которое занимает ротор, когда поля статора и ротора синхронизированы.
| Рис. 2 |
1.1 Рабочие характеристики синхронных асинхронных двигателей
При изучении рабочих характеристик синхронного асинхронного двигателя необходимо учитывать три различных типа крутящих моментов. К ним относятся пусковой момент, который указывает способность двигателя запускаться против нагрузки, пусковой момент, который указывает на способность двигателя поддерживать работу во время переключения с асинхронного двигателя на синхронный двигатель, пусковой момент, который представляет синхронную работу двигателя при Пиковая нагрузка. Первые два крутящих момента тесно связаны друг с другом и являются характеристиками машины, работающей как асинхронный двигатель. Вытягивающий момент является характеристикой, когда он работает синхронно. Кривые характеристик синхронного асинхронного двигателя, работающего при полной нагрузке, единица p.f. и при 0,8 п.ф. ведущий показан на рис. 3.
Когда нагрузка превышает синхронный тяговый момент, машина теряет синхронность и работает как асинхронный двигатель с колебаниями крутящего момента и проскальзыванием из-за постоянного тока. возбуждение. При уменьшении момента нагрузки двигатель автоматически ресинхронизируется.
1.2 Преимущества синхронного асинхронного двигателя
Ниже приведены преимущества синхронного асинхронного двигателя по сравнению с явнополюсным синхронным двигателем.
i) Синхронный асинхронный двигатель может запускаться и синхронизироваться при крутящем моменте, превышающем полную нагрузку, что невозможно для явнополюсного синхронного двигателя, который должен запускаться при небольшой нагрузке.
ii) Возбудитель, необходимый для синхронного асинхронного двигателя, имеет меньшую мощность, поскольку зазор невелик по сравнению с обычным явнополюсным двигателем.
iii) Обмотка ротора синхронного асинхронного двигателя может выполнять функцию обеспечения возбуждения и необходимого демпфирования. Таким образом, не требуется отдельной демпферной обмотки.
iv) Не требуется отдельного пускового и управляющего оборудования.
1.3 Недостатки синхронного асинхронного двигателя
i) Поскольку зазор мал по сравнению с обычным явнополюсным синхронным двигателем, он не обеспечивает большой перегрузочной способности.
ii) Изменение коэффициента мощности велико по сравнению с обычным синхронным двигателем.
iii) Изменение скорости невозможно для синхронного асинхронного двигателя, так как он работает при постоянном двигателе.
1.4 Применение синхронного асинхронного двигателя
В приложениях, в которых необходимо приводить в действие механическую нагрузку наряду с опережающими фазами синхронных двигателей, следует использовать синхронный асинхронный двигатель. Кроме того, этот двигатель можно использовать в тех случаях, когда крутящий момент под нагрузкой остается почти постоянным.0003
Асинхронные и синхронные двигатели — GE Motors — Каталоги в формате PDF | Техническая документация
Добавить в избранное
{{requestButtons}}
Выдержки из каталога
Синхронные двигатели
Опыт имеет значение Мы производим двигатели более 125 лет. В 1879 году основатель GE Томас Эдисон сконструировал первый электродвигатель для линии от 110 до 120 вольт в Менло-Парке, штат Нью-Джерси. Это устройство до сих пор существует и работает! Он находится в Исторической коллекции Эдисона в Нью-Джерси. С 1987, GE произвела более 15 000 машин среднего/высокого напряжения. С 1992 г. мы сертифицированы по системе качества ISO 9001:2000. С 1995 г. в наши производственные процессы встроены процессы «Шесть сигм». В настоящее время мы предлагаем полный ассортимент больших двигателей, и эти двигатели разработаны. ..
Корпуса Предназначен для работы Этот стандартный корпус подходит для большинства промышленных условий внутри помещений. Охлаждающий воздух поступает через торцевые щиты с обоих концов, проходит через концевые витки катушки, ротор и статор, затем выходит через отверстия в боковых сторонах рамы. Отверстия с жалюзи обеспечивают большую защиту, чем требуется стандартами NEMA. Воздушный поток спроектирован таким образом, чтобы устранить горячие точки и минимизировать шум. Для более высоких номиналов или для специальных более тихих рабочих конструкций отверстия для забора и выпуска охлаждающего воздуха расположены в легко снимаемом корпусе в виде цилиндра. Охлаждение…
Превосходная конструкция Рама статора и магнитный сердечник • Долгий и безотказный срок службы Предназначен для обеспечения оптического контроля. Сверхмощная изготовленная сталь или чугун сохраняют выравнивание. Пластины статора штампуются из высококачественной листовой электротехнической стали с низкими потерями и покрываются термостойкой изолирующей пленкой. Большинство рейтингов имеют прямоугольную рамную конструкцию с использованием пакетных сердечников. Магнитопровод состоит из пластин, сильно сжатых для механической прочности и полностью намотанных перед установкой пакета сердечников в раму. Эта конструкция позволяет…
Роторы Ротор с короткозамкнутым ротором • • • • • Низкая инерция ротора Увеличенное время опрокидывания Прочные соединения стержня с торцевым кольцом Пониженный шум от ветра Оптимальный крутящий момент в сравнении с проскальзыванием Конструкция Асинхронный двигатель с короткозамкнутым ротором представляет собой прочную, но простую конструкцию вала и магнитной цепи и электрическая обмотка. Магнитопровод состоит из дисков, штампованных из тонколистовой стали электротехнического класса, собранных в ламинированный магнитопровод, закрепленный на валу. Пластины покрыты термостойкой изоляционной пленкой, чтобы уменьшить магнитные потери и при этом сохранить стабильность размеров в условиях суровых…
Синхронный ротор • Универсальность пусковой обмотки • Бесщеточное возбуждение для минимального обслуживания и максимальной надежности Синхронные роторы предназначены в первую очередь для приложений, требующих высокоэффективных двигателей. Каждый полюс в сборе изготовлен из пластин из высокопрочной стали с обмоткой возбуждения постоянного тока, окружающей корпус полюса. Обмотка возбуждения состоит из прямоугольного отрезка изолированного медного провода, намотанного непосредственно на изолированный корпус полюса и соединенного высокотемпературной, высокопрочной изолирующей эпоксидной смолой, которая при отверждении делает катушку непроницаемой для грязи, влаги и других…
Балансировка После сборки все роторы проходят динамическую балансировку по классу балансировки API 541 для обеспечения бесшумной работы и длительного срока службы подшипников. Класс балансировки API 541 составляет менее одной трети класса балансировки ISO 2.5, обычно принятого в отрасли. Методы ступенчатой балансировки в соответствии с API 541 применяются ко всем 4-полюсным крестовинам и ко всем 2-полюсным машинам. Все конструкции 2-полюсных гибких роторов имеют центральную плоскость балансировки ротора в соответствии с API 541. Балансировочные станки способны балансировать даже самые большие роторы перед сборкой. Готовый двигатель работает на холостом ходу с номинальной…
Вибрационное оборудование Сейсмическое оборудование, такое как Robertshaw™, измеряет общую вибрацию. На раме располагаются от 1 до 6 единиц. Датчики бесконтактного типа, такие как Bentley Nevada™, измеряют вибрацию вала. 2-5 штук располагаются на корпусе подшипника. Ускорительный тип, такой как Metrix™, измеряет вибрацию корпуса подшипника. 1-6 шт. расположены на корпусе подшипника. Другие аксессуары При необходимости могут быть поставлены следующие аксессуары: • Защита от перенапряжения • Тахометры (конденсаторы и разрядники) • Реле превышения скорости • Трансформаторы тока • Направляющие рельсы • Реле давления • Подошвы • Пространство…
Все каталоги и технические брошюры GE Motors
MV7000 Flat Pack (FP)
16 страниц
Удаленный мониторинг и диагностика Visor
5 страниц
Каталог стандартных промышленных двигателей
211 страниц
Энергосбережение — TEFC для тяжелых условий эксплуатации
7 страниц
Преобразование мощности
91 страница
Услуги преобразователя частоты переменного тока
4 страницы
LV 7000-6 и 8
2 страницы
тематическое исследование
1 страниц
Серия MV7
5 страниц
Каталог стандартных промышленных двигателей
330 страниц
N37
12 страниц
Двигатели среднего и высокого напряжения и высокой скорости
16 страниц
D_Использование силы ветра
20 страниц
Промышленные генераторы — мощность, когда это важно
13 страниц
Информационный бюллетень SVC и STATCOM
4 страницы
Среднее/высокое напряжение и высокоскоростные двигатели
9Страницы
Низковольтные двигатели
8 страниц
Привод среднего напряжения MV6
20 страниц
Приводы LV 7000
4 страницы
Преобразователь частоты MV3000 BDM
2 страницы
Авторизованные международные сервисные центры Motor
34 страницы
Генераторы Брошюра
16 страниц
Приводной двигатель A$D Ultra с постоянным крутящим моментом и переменной скоростью
2 страницы
X$DUltra® 841 IEC
8 страниц
X$D Ultra® 841
6 страниц
Асинхронные двигатели среднего напряжения 500–7500 л.
с., 400–5600 кВт8 страниц
Возможности для вашего бизнеса
3 страницы
Брошюра Quantum LMV
8 страниц
Высокоэффективные двигатели ValueLine с вертикальным полым валом и большой тягой WPI
2 страницы
X$D Ultra 841 VSS
6 страниц
GEA18868 X$D Ultra661
4 страницы
GEA17458 X$D Ultra
8 страниц
DC2100e
4 страницы
Двигатель бронированной мельницы MD800
6 страниц
Оригинальные детали
6 страниц
Синхронные гидрогенераторы
10 страниц
GE Mill Drive увеличивает производительность Grupo Mexico
1 страниц
Электростанция ProSolar
3 страницы
Столетие назад мы вывели мощность на совершенно новый уровень
4 страницы
Новое направление для DP
12 страниц
Надежные моторы предпочитают китайские горнодобывающие компании
1 страниц
Энергосбережение
2 страницы
X$D Ультра? 841 VSS
6 страниц
MV7000
16 страниц
Серия MV4
9 страниц
Visor Asset Management?Visor 2.
02 страницы
Onduleur Central ProSolar
3 страницы
A$DUUltra
2 страницы
Стандартные эффективные двигатели VHS WPI
2 страницы
GEA18201A X$D МЭК
6 страниц
Информационный бюллетень DC Buyer’s Guide
180 страниц
Электродвигатели постоянного тока Kinamatic 1–500 л.с. Информационный бюллетень
6 страниц
Электродвигатели постоянного тока Kinamatic
6 страниц
Электродвигатели постоянного тока CD6000, 250–4500 л.
с.12 страниц
Pegasus MHV — асинхронные двигатели переменного тока для вертикальной установки
6 страниц
X$D Ultra841 IEC — высокоэффективные двигатели класса IE3 для сверхтяжелых условий эксплуатации
8 страниц
Высокоэффективные двигатели X$D IEC — IE2 для тяжелых условий эксплуатации
6 страниц
X$D Ultra: двигатели NEMA Premium для сверхтяжелых условий эксплуатации
8 страниц
X$D Ultra841 — двигатели NEMA Premium для сверхтяжелых условий эксплуатации
6 страниц
X$D Ultra 661 — двигатели теплообменника
4 страницы
Pegasus MHV — Асинхронный двигатель с фазным ротором
6 страниц
Решение для экскаваторов переменного и постоянного тока
12 страниц
Серия 9000-RCM
2 страницы
Электроэнергетика — двигатели и генераторы
12 страниц
Нефть и газ – двигатели и генераторы
12 страниц
Брошюра о линейке двигателей
8 страниц
Добыча полезных ископаемых — двигатели и генераторы
12 страниц
Архивные каталоги
2008 Каталог стандартных продуктов
248 страниц
Двигатель для любых сельскохозяйственных работ
15 страниц
Премиум-эффективность TEFC и защита от капель с открытым инвертором
2 страницы
Большие синхронные машины серии 9000
8 страниц
Инструкции по установке вертикального двигателя
19 страниц
GE Motors — линейка продуктов
6 страниц
Сравнить
Удалить все
Сравнить до 10 продуктов
Синхронный двигатель | bartleby
Что такое синхронный двигатель?
Синхронный двигатель представляет собой электродвигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с током питания переменной частоты. Целому числу циклов переменного тока период вращения точно равен. Статор двигателя в синхронном двигателе содержит многофазные электромагниты переменного тока, благодаря которым создается магнитное поле, вращающееся в такт колебаниям линейного тока. Ротор содержит постоянный магнит, и ротор вращается синхронно с полем статора с той же скоростью и в результате создает второе синхронизированное магнитное поле, которое в природе вращается. Когда синхронный двигатель снабжен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре, он называется машиной с двойным питанием. Наиболее распространенными двигателями переменного тока являются синхронные двигатели переменного тока и асинхронные двигатели переменного тока.
CC BY-SA 4.0 | Изображение предоставлено: https://en.wikipedia.org | Temdor
Асинхронный двигатель относится к типу асинхронного двигателя. Чтобы индуцировать ток в обмотке ротора, ротор должен вращаться немного медленнее, чем переменный ток. В приложениях синхронизации, таких как таймеры в бытовых приборах, синхронные часы, магнитофоны и т. Д., Используются небольшие синхронные двигатели. Синхронный двигатель доступен в дробных размерах лошадиных сил, которые самовозбуждаются до мощных промышленных размеров. Везде, где требуется точный моторный привод с постоянной скоростью, используются синхронные двигатели с дробным диапазоном мощности. Эти машины обычно используются в таймерах, электрических часах аналогового характера и других устройствах, где требуется точное время.
Синхронный двигатель большой мощности обеспечивает две важные функции.
- Во-первых, он преобразует энергию переменного тока в работу.
- Во-вторых, он может обеспечивать коррекцию коэффициента мощности, поскольку может работать с опережающим или единичным коэффициентом мощности. Коэффициент мощности двигателя можно изменять, изменяя возбуждение двигателя постоянным или постоянным током.
Разница между асинхронным двигателем и синхронным двигателем заключается в том, что, поскольку синхронный двигатель не зависит от индукции тока для создания магнитного поля ротора, он вращается со скоростью, привязанной к частоте сети, в отличие от асинхронного двигателя.
Синхронная скорость
Синхронная скорость вращения синхронного двигателя определяется в об/мин по формуле:
NS = 120 x fp
где f = частота в Гц и p = число полюсов
и в рад/сек определяется как:
ωs = 4πfp
, где f = частота в Гц и p = количество полюсов
Пример
Рассмотрим однофазный 4-полюсный синхронный двигатель, работающий при частоте переменного тока 50 Гц. поэтому синхронная скорость будет равна NS = 120 x 504 = 1200 об/мин.
Конструкция
Статор и ротор являются основными компонентами синхронного двигателя. Статор как асинхронного, так и синхронного двигателя аналогичен по конструкции. В виде исключения корпус статора содержит обертку с синхронной электрической машиной двойного питания с фазным ротором. Клавиатуры и окружные ребра прикреплены к оберточной пластине. Крепление на раме и опоры необходимы для переноски машины. Для подключения к источнику питания возбуждения требуются щетки и токосъемные кольца, когда обмотка возбуждения возбуждается постоянным током, но когда она не возбуждена, она не подключается. С помощью бесщеточного возбудителя также можно возбуждать обмотку возбуждения. Для шести полюсов используются цилиндрические круглые роторы.
В отличие от неявнополюсного ротора, явнополюсный ротор используется, когда в некоторых машинах требуется большое количество полюсов. Конструкция синхронных двигателей почти аналогична конструкции синхронного генератора переменного тока. Стационарный якорь и обмотка вращающегося возбуждения используются в конструкции большинства синхронных двигателей. Этот тип конструкции является преимуществом двигателя постоянного тока, в котором используется вращающийся якорь.
Операции
За счет взаимодействия поля статора и ротора работает синхронный двигатель. Обмотка статора, которая присутствует в статоре, снабжена трехфазным питанием, а ротор снабжен питанием постоянного тока. Трехфазный вращающийся магнитный поток создается трехфазной обмоткой статора, по которой течет трехфазный ток. Ротор блокируется этим вращающимся магнитным полем и соответственно вращается вместе с ним. Говорят, что двигатель синхронизирован, когда поле ротора блокируется полем статора. Возможен также статор с однофазной обмоткой, но здесь направление вращения не определено, поскольку машина может начать вращаться в любом направлении, если только этому не препятствуют пусковые устройства.
Скорость двигателя зависит только от частоты сети, когда двигатель работает. Обмотка возбуждения больше не следует за вращающимся магнитным полем, и двигатель теряет синхронизацию, когда нагрузка двигателя превышает нагрузку пробоя. Если синхронизация выходит из строя, поскольку двигатель не может создавать крутящий момент, на практике синхронные двигатели имеют обмотки, называемые демпферными обмотками, для стабилизации работы и облегчения запуска.
Крутящий момент создается разностью фаз между вращающимся магнитным полем и ротором. Когда существует небольшая разность фаз между вращающимся ротором и вращающимся магнитным полем, создаваемый крутящий момент невелик. Крутящий момент, который развивается при пуске, называется пусковым моментом, а момент полной нагрузки двигателя называется рабочим моментом. Затем эквивалентного асинхронного двигателя, поскольку эти обмотки меньше и при длительной работе могут перегреваться, а в обмотках возбуждения ротора, поскольку индуцируются большие напряжения, устройства защиты синхронных двигателей могут определить это состояние и отключить подачу питания.
Методы пуска
Синхронные двигатели — это типы двигателей, которые не запускаются автоматически. Это связано с инерцией ротора, поэтому он не может мгновенно следовать за вращением магнитного поля статора. В состоянии покоя синхронный двигатель не создает собственного крутящего момента. Так что без какого-то дополнительного механизма он не может разогнаться до синхронной скорости.
Асинхронный двигатель с короткозамкнутым ротором входит в состав больших двигателей, работающих на промышленной частоте, что обеспечивает достаточный крутящий момент для ускорения, а при работе на скорости двигателя также служит для гашения колебаний. Обмотка возбуждения возбуждается, и двигатель выходит из синхронизма, когда скорость ротора приближается к синхронной.
Перед приложением нагрузки система очень больших двигателей может включать маломощный двигатель, который ускоряет синхронную машину, которая не нагружена. Изменяя частоту тока статора, двигатели с электронным управлением можно разогнать с нулевой скорости. Используются электрические механические часы с встроенным питанием или очень маленькие таймеры синхронного двигателя, которые используют частоту сети для запуска зубчатого механизма с правильной скоростью. Если момент инерции ротора и его механическая нагрузка достаточно малы, то такие небольшие синхронные двигатели могут запускаться без посторонней помощи.
При рассмотрении различных методов пуска важным параметром является экономичность эксплуатации. Возможным способом решения проблемы пуска двигателя является возбуждение ротора. Рабочий момент в синхронном двигателе составляет от 0,3 до 16 унций-дюйм. Синхронный двигатель с экранированными полюсами — это тип двигателя переменного тока, в котором используются катушки возбуждения с дополнительными медными экранирующими катушками для создания слабого вращающегося поля. Корпорация Nidec Motors производит лучшие синхронные двигатели.
Контекст и приложения
Эта тема важна для профессиональных экзаменов для выпускников и аспирантов.
- Бакалавр электротехники
- Магистр электротехники
Практические задачи
Q1. С каким коэффициентом мощности могут работать синхронные двигатели?
- Единичный коэффициент мощности
- Опережающий коэффициент мощности
- Оба a и b
- Ничего из перечисленного
Ответ: Вариант c
Объяснение: Он может работать с опережающим и единичным коэффициентом мощности, поскольку синхронные двигатели преобразуют энергию переменного тока в работу, а также обеспечивают коррекцию коэффициента мощности.
Q2. К какому типу относятся асинхронные двигатели?
- Синхронные двигатели
- Асинхронные двигатели
- Двигатели постоянного тока
- Ни один из этих
Ответ: Вариант b
Q3. Каков рабочий крутящий момент синхронных двигателей?
- от 0,3 до 16 унции в
- 17–20 унции
- 50–100 ун. двигателей составляет от 0,3 до 16 унций-в.
Q4. Что происходит с синхронной скоростью при изменении нагрузки?
- Увеличивается при увеличении нагрузки
- Уменьшается при уменьшении нагрузки
- Всегда остается постоянным
- Ни один из этих вариантов
Ответ: Вариант c
Объяснение: Синхронная скорость – это постоянная скорость, которая зависит от частоты питания и количества полюсов.
Q5. Что содержит ротор?
- Постоянный магнит
- Электрический магнит
- Электромагнит
- Ничего из перечисленного
Ответ : Вариант a
Объяснение: Ротор содержит постоянный магнит, и ротор вращается синхронно с полем статора с той же скоростью и в результате создает второе синхронизированное магнитное поле, которое в природе вращается.
- Часовой привод
- Электрическая машина с двойным питанием
- Коэффициент короткого замыкания
Мы обеспечим вас пошаговыми решениями миллионов задач из учебников, а специалисты в данной области наготове 24 часа в сутки, 7 дней в неделю, когда вы запутался и многое другое.
Ознакомьтесь с примером решения вопросов и ответов по электротехнике здесь!
*Время ответа зависит от темы и сложности вопроса. Среднее время отклика составляет 34 минуты для платных подписчиков и может быть больше для рекламных предложений.
Разница между синхронным двигателем переменного тока и двигателем с постоянными магнитами
Основное различие между синхронным двигателем переменного тока и двигателем с постоянными магнитами
Синхронный двигатель переменного тока:
- Синхронный двигатель переменного тока состоит из статора и ротора. Статор имеет цилиндрическую форму и имеет несколько витков вокруг своей поверхности. Ротор находится внутри статора и имеет несколько полюсов, по одному на каждую катушку статора.
- Поскольку синхронные двигатели содержат встроенный регулятор напряжения, пусковой момент остается практически постоянным на протяжении всего процесса разгона, а также синхронная скорость.
- широко используется во многих областях, поскольку ему не нужно использовать синхронный генератор поля возбуждения, синхронные двигатели могут создавать большой пусковой крутящий момент.
- У них нет постоянных магнитов, и для начала вращения им нужны два основных компонента: короткозамкнутая обмотка ротора и приложенное напряжение.
- обладают высоким КПД, хорошей управляемостью. Он подходит для всех видов нагрузки, диапазон регулирования скорости очень широк.
- обычно используется в качестве синхронного генератора или синхронного генератора переменного тока. Синхронный двигатель имеет выходное напряжение, скорость синхронной машины определяет скорость, с которой генерируется это выходное напряжение, и, следовательно, определяет частоту сетевого электричества (50 Гц или 60 Гц).
- Синхронный двигатель работает как турбина и направление выработки электроэнергии можно менять, переключая полярность каждой фазы.
- Синхронный двигатель обычно используется в очень больших приложениях, таких как передача электроэнергии (например, как часть систем постоянного тока высокого напряжения (HVDC)), железнодорожная тяга.
Синхронный двигатель переменного тока
Синхронные двигатели
Синхронный двигатель переменного тока
Двигатель с постоянными магнитами:
- Двигатель с постоянными магнитами (PMM) — это тип электродвигателя, в котором используются постоянные магниты для создания вращающихся магнитных полей, необходимых для вращения ротора.
- Двигатели с постоянными магнитами обеспечивают очень высокий пусковой крутящий момент и плавную работу, но для вращения ротора требуется внешнее электропитание (сеть переменного тока).
- Двигатели с постоянными магнитами используются во многих простых устройствах, таких как потолочные вентиляторы, ступица колеса или механизм для открытия и закрытия клапанов.
- Машины с постоянными магнитами могут работать от сети переменного тока (модифицированный стандартный тип), они также обеспечивают высокую эффективность и управляемость при низком уровне шума.
- Постоянные магниты можно использовать для изготовления двигателей с меньшим количеством движущихся частей.
- Они дороже, чем синхронные двигатели.
- Скорость ротора меньше, чем у синхронных двигателей.
- Обладает большой мощностью на единицу веса.
- Тяговые приводы на постоянных магнитах (PMLTD) в настоящее время используются в некоторых локомотивах, трамваях и электромобилях. АС
- Постоянные магниты не потеряют своего магнетизма, если они не нагреты до точки, при которой они размагничиваются.
Двигатель с постоянными магнитами (Источник изображения: wikipedia.org)
Синхронный двигатель переменного тока и двигатель с постоянными магнитами
Синхронные двигатели переменного тока Двигатели с постоянными магнитами Синхронный двигатель переменного тока состоит из статора и ротора. Статор имеет цилиндрическую форму и имеет несколько витков вокруг своей поверхности. Ротор находится внутри статора и имеет несколько полюсов, по одному на каждую катушку статора.Двигатели с постоянными магнитами используются во многих простых устройствах, таких как потолочные вентиляторы, ступица колеса или механизм для открытия и закрытия клапанов. У них нет постоянных магнитов, и для начала вращения им нужны два основных компонента: короткозамкнутая обмотка ротора и приложенное напряжение. Поскольку синхронные двигатели содержат внутренний регулятор напряжения, пусковой момент остается почти постоянным на протяжении всего процесса разгона, а также синхронная скорость. Двигатели с постоянными магнитами обеспечивают очень высокий пусковой крутящий момент и плавную работу, но для вращения ротора требуется внешнее электропитание (сеть переменного тока). Синхронный двигатель переменного тока широко используется во многих областях, поскольку не требует использования синхронного генератора поля возбуждения, синхронные двигатели могут создавать большой пусковой момент и имеют множество преимуществ, таких как высокий КПД, хорошая управляемость. Роланд Мендель Подходит для всех видов нагрузки, диапазон регулирования скорости очень широк. Машины с постоянными магнитами могут работать от сети переменного тока (модифицированный стандартный тип), они также обеспечивают высокую эффективность и управляемость при низком уровне шума. Синхронный двигатель переменного тока обычно используется в качестве синхронного генератора или синхронного генератора переменного тока. Йоши Таннамури Синхронный двигатель имеет выходное напряжение, скорость синхронной машины определяет скорость, с которой генерируется это выходное напряжение, и, следовательно, частоту сетевого электричества (50 Гц или 60 Гц). Тяговые приводы на постоянных магнитах (PMLTD) в настоящее время используются в некоторых локомотивах, трамваях и электромобилях. Постоянные магниты можно использовать для создания двигателей без движущихся частей. Синхронный двигатель переменного тока работает как турбина, а направление выработки электроэнергии можно менять, переключая полярность каждой фазы. Двигатель с постоянными магнитами (PMM) — это тип электродвигателя, в котором используются постоянные магниты для создания вращающихся магнитных полей, необходимых для вращения ротора. Двигатели с постоянными магнитами очень. Синхронный синхронный двигатель переменного тока обычно используется в очень больших приложениях, таких как передача электроэнергии (например, как часть систем постоянного тока высокого напряжения (HVDC)), железнодорожная тяга Постоянные магниты не потеряют своего магнетизма, если их не нагреть до точки, при которой они размагничиваются. Поиск
Преимущества синхронных двигателей
В то время, когда сокращение энергопотребления является приоритетом для конечных пользователей и государственных учреждений, синхронные двигатели прочно закрепились на рынке насосов благодаря своей эффективности. Несмотря на множество преимуществ, не каждая технология синхронного двигателя является правильным выбором для любого применения в насосной технике.
В этой статье рассматриваются и сравниваются различные типы синхронных и асинхронных двигателей, а также описываются факторы, которые необходимо учитывать при выборе двигателя.Синхронные двигатели становятся все более популярными во всем мире. Аналитики ожидают, что эта категория вырастет с 4% до более чем 8% всех насосных двигателей в ближайшие пять лет. Это число может показаться небольшим, но это только начало растущей тенденции.
Популярность этого мотора связана с технологической революцией последних 10 лет, которая снизила стоимость процессорных чипов и, в свою очередь, стоимость системы мотор/привод. Тридцать лет назад, когда в насосной промышленности появились синхронные двигатели, процессоры для управления приводом были дорогими и не обладали многими функциями. Теперь процессоры составляют меньшую часть системы и являются более мощными.
ИЗОБРАЖЕНИЕ 1: Сравнение типов синхронных двигателей. 1, 2 и 3 являются относительными значениями, где 0 представляет базовый уровень.
1 лучше, 2 лучше и 3 лучше. Источник: Гидравлический институт (изображения предоставлены Nidec Motor Corporation)Использование редкоземельных магнитов также увеличивает стоимость, и цены на магниты сильно колеблются в зависимости от доступных поставок (большинство из них поступает из Китая). К счастью, многие производители в настоящее время предлагают синхронные двигатели без магнитов или с магнитами, полученными не из редкоземельных элементов, что делает двигатели более доступными.
Что такое синхронный двигатель?
В синхронном двигателе ротор вращается с той же скоростью (синхронно) с вращающимся магнитным полем статора. В отличие от асинхронного двигателя, который использует проскальзывание ротора для индукции тока в ротор для создания крутящего момента, в синхронных двигателях нет наведенного тока и последующих потерь ротора. Снижение потерь означает более высокую эффективность машин. Преимущества:
- высокая эффективность
- без потерь ротора
- более низкая температура подшипника
- менее частое обслуживание подшипников
- Производительность частотно-регулируемого привода (VFD) (особенно на низких скоростях)
Понятно, что при работе с приводом с регулируемой скоростью и регулировке рабочей скорости в соответствии с требованиями приложения есть преимущества в энергопотреблении.
Конструкции на синхронной основе получают наибольший выигрыш в эффективности при работе с частотно-регулируемым приводом. В асинхронном двигателе с частотно-регулируемым приводом потери ротора составляют более высокую долю общих потерь при работе с низкой нагрузкой по сравнению с работой при полной нагрузке и скорости. По мере снижения нагрузки пользователи видят сравнительно лучшую производительность синхронных двигателей в результате устранения этих потерь (Рисунок 2).
ИЗОБРАЖЕНИЕ 2: Синхронный и индукционный КПД
Более плоская кривая КПД означает, что реализованные преимущества превысят дифференциал повышения пиковой эффективности IE4 или IE5. Учитывая, что до 75 % рабочего времени обычно тратится на скорость ниже 90 % от полной скорости, влияние оказывается значительным. Например, в системах отопления, вентиляции и кондиционирования воздуха (HVAC) при полной нагрузке синхронный двигатель, интегрированный с ЧРП, обеспечивает увеличение эффективности на 3-6% по сравнению с асинхронным двигателем на полной скорости с ЧРП.
Тем не менее, при мощности 25 % пользователи по-прежнему достигают 44 % производительности насоса, но с повышением эффективности на 8–12 %. Таким образом, при работе с частичной нагрузкой синхронные двигатели обеспечивают более высокий КПД.Разновидности синхронных двигателей
В настоящее время доступно несколько типов синхронных двигателей, и кажется, что все они имеют собственные аббревиатуры. Вот наиболее распространенные термины, которые нужно знать.
Двигатель с электронной коммутацией (ECM)
При обсуждении насосных применений ECM относится к двигателю со встроенными приводами и органами управления. ECM обычно используются в системах HVAC.
Бесщеточные с постоянными магнитами (BPM)
Они могут называться постоянными магнитами переменного тока (PMAC) или бесщеточными постоянными магнитами (BLDC). Постоянные магниты монтируются на поверхности или внутри. В последнем используются только редкоземельные металлы, тогда как в первом могут использоваться магниты на основе феррита или редкоземельных элементов.
Низкая механическая прочность и ограниченная скоростная способность являются недостатками ПМ поверхностного монтажа. Преимуществом является возможность легкого изменения скорости.Гибридный синхронный реактивный двигатель (HSM) с постоянными магнитами
HSM используют магниты меньшей силы, которые насыщают ротор и улучшают коэффициент мощности. Доля реактивного момента значительна по сравнению с PMAC.
Синхронный реактивный двигатель (SynRM)
SynRM работает на основе концепции «магнитного сопротивления», но не требует магнитов для создания магнитного поля. Ротор состоит из стальных пластин, вырезанных для использования в качестве магнитных полюсов. Прочная конструкция обычно требует большего тока для частотно-регулируемого привода и имеет более низкий коэффициент мощности по сравнению с конструкциями с постоянными магнитами.
Синхронный реактивный двигатель с алюминиевой клеткой (SynRA)
SynRA предлагает дополнительные преимущества работы на стандартном частотно-регулируемом приводе вольт/герц (Гц) и может быть простой заменой существующему асинхронному двигателю.
Реактивный реактивный двигатель (SRM)
SRM предшествует асинхронным двигателям как постоянного, так и переменного тока. Проблемы с управлением делают его непригодным для многих приложений. Он имеет простую конструкцию, но сложную электрическую схему. Для управления большинством приложений требуются специальные датчики положения и механизмы синхронизации.
Выбор синхронного двигателя также означает выбор частотно-регулируемого привода, а выбор частотно-регулируемого привода зависит от различных синхронных технологий. Таким образом, важно понимать от производителя различные ожидаемые результаты.
При выборе индукционной или синхронной технологии взгляните на общий вид. Это «системосознательное» решение требует общего взгляда на цели системы. Если скорость двигателя должна постоянно поддерживаться на уровне 100 %, хорошим выбором будет асинхронный двигатель.
Потенциальный недостаток синхронных двигателей по сравнению с асинхронными двигателями заключается в том, что в приложениях с нестабильными насосными нагрузками могут возникать дрожания, что в конечном итоге приводит к отключению двигателя.
Чтобы предотвратить эту проблему, синхронный двигатель и система привода должны включать в себя резистор для ЧРП.Что касается тепловых характеристик, синхронная машина будет иметь сравнительно более холодный ротор, чем асинхронная. Это связано с улучшенной плотностью мощности и возможностью создания данного номинала в меньшем корпусе с менее активным электрическим материалом, а также с более высокой эффективностью.
Пониженная температура ротора также повышает надежность и техническое обслуживание. Поскольку к подшипникам передается меньше тепла, а снижение температуры всего на 50 F (10 C) удваивает срок службы смазки, пользователи могут ожидать, что синхронная машина будет более надежной, чем индукционная.
Стандарты Министерства энергетики США
Министерство энергетики США (DOE) заинтересовано в технологии синхронных двигателей и рассматривает возможность установления для них стандартов испытаний. Текущий индекс энергии насоса (PEI) не показывает разницы в эффективности синхронных и асинхронных двигателей, но Министерство энергетики при участии Гидравлического института (HI) предложило создать коэффициенты, демонстрирующие разницу между синхронными и асинхронными машинами.
Это позволит конечным пользователям легко сравнивать то, что поставщики насосов говорят об эффективности их двигателей и приводов.Со стандартными асинхронными двигателями может быть трудно и непомерно дорого превысить IE3 (премиум NEMA) для достижения желаемого уровня эффективности IE4 или IE5, особенно для меньшей номинальной мощности менее 75 киловатт (кВт). Синхронные двигатели, с другой стороны, обеспечивают повышение энергоэффективности в отрасли, а новейшие и наиболее высокоэффективные двигатели и приводы с регулируемой скоростью легко доступны на рынке.
Применение насосов
Сегодня синхронная технология произвела фурор в насосах для бассейнов, заняв значительную долю отрасли. Законодательство побуждает производителей становиться более комплексными в своих энергоэффективных предложениях. В частности, для достижения уровня эффективности в Калифорнии теперь требуется использование синхронной технологии в насосах для бассейнов и спа, что заставляет производителей стандартизировать синхронную технологию по всем направлениям.
Для циркуляционных насосов (используемых в жилых и коммерческих системах отопления, вентиляции и кондиционирования) преобладают синхронные двигатели. В настоящее время Министерство энергетики работает над постановлением, которое может потребовать использования синхронных двигателей для достижения требуемого уровня эффективности и использования более низких потерь при частичной нагрузке.
Асинхронные двигатели с регулируемой скоростью широко используются в коммерческих насосных установках, но следующей эволюцией для повышения эффективности могут стать системы с синхронным приводом.
Синхронные двигатели все чаще используются в насосной промышленности, и эта тенденция может ускориться по мере того, как экономия энергии и нормативные требования будут оказывать давление на конечных пользователей. Доступно несколько технологий синхронных двигателей, каждая из которых имеет свои преимущества и недостатки. Крайне важно полностью оценить различные предложения и выбрать технологию, которая лучше всего подходит для приложения.