Содержание
Что такое синхронный двигатель и где он используется
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
- Определение и принцип действия
- Конструкция ротора
- Пуск синхронного двигателя
- Виды
- Сфера применения
- Преимущества и недостатки
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.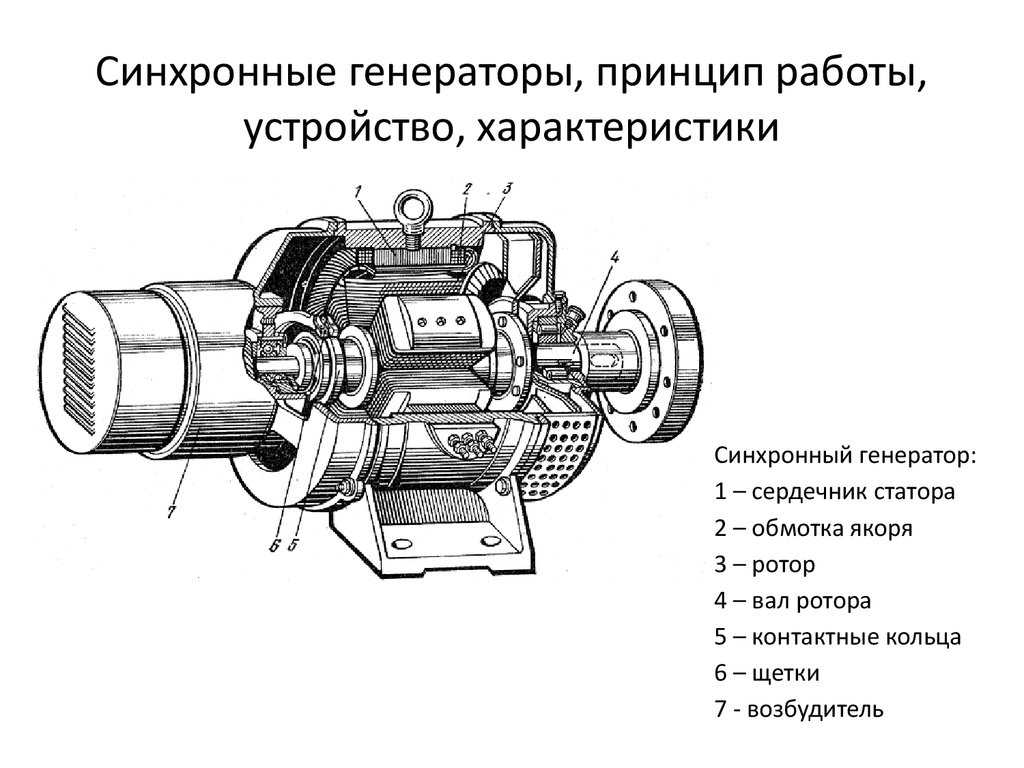
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.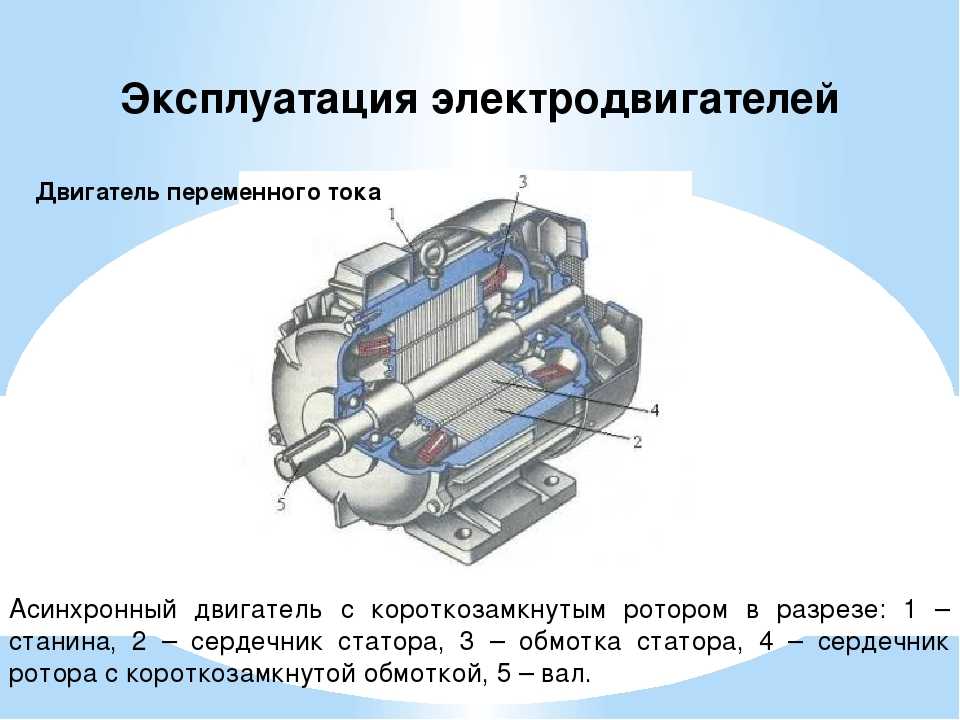
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор.
 В нём расположены обмотки. Его еще называют якорем.
В нём расположены обмотки. Его еще называют якорем. - Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
 В нём расположены обмотки. Его еще называют якорем.
В нём расположены обмотки. Его еще называют якорем.Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.
Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз.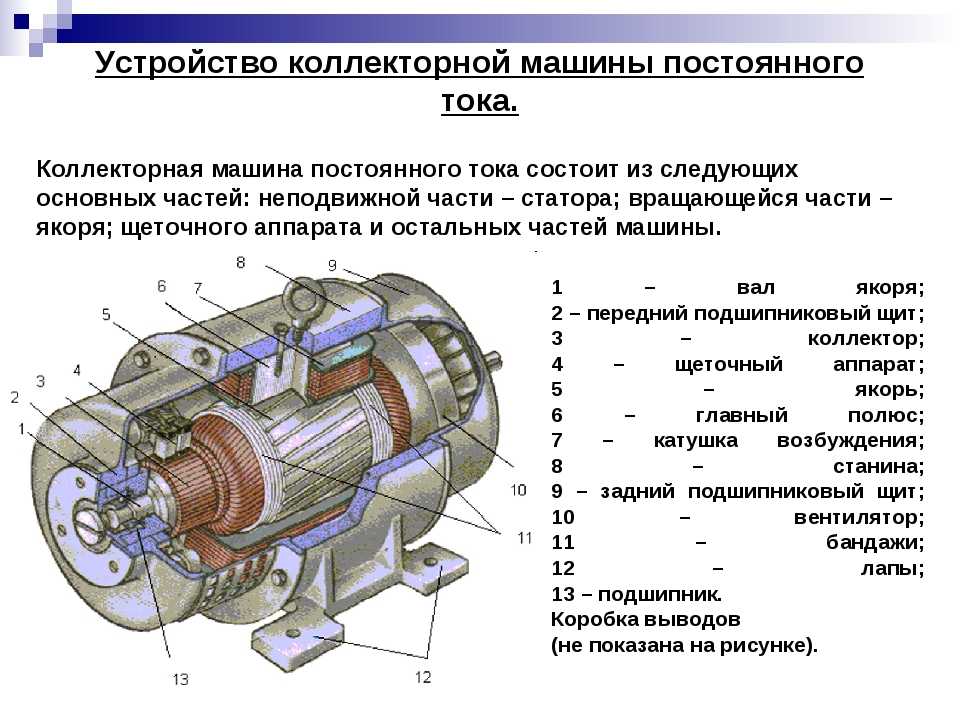 Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Виды
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
 Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.
При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
 Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
Материалы по теме:
- Что такое ротор и статор
- Как передается электроэнергия на расстояния без проводов
- Что такое частотный преобразователь
Опубликовано 30. 05.2019 Обновлено 31.05.2019 Пользователем Александр (администратор)
05.2019 Обновлено 31.05.2019 Пользователем Александр (администратор)
Как это работает: синхронный электродвигатель
Фото: концерн «Автоматика»
Синхронные электродвигатели впервые появились в середине XIX века и сегодня широко применяются в газо- и нефтедобывающей промышленности, станкостроении, автомобилестроении, ЖКХ и других отраслях. Они хорошо справляются с перегрузками и могут стабильно работать долгое время без остановки. Именно такие двигатели для самых разных задач выпускает Калужский электромеханический завод концерна «Автоматика».
О том, как устроен и как работает синхронный электродвигатель, читайте в нашем материале.
По законам магнетизма
Синхронные электродвигатели служат людям в самых разных отраслях промышленности. Благодаря своим характеристикам они могут приводить в движение мощные приводы, устойчивы к ударным нагрузкам, часто возникающим, например, в металлургии и машиностроении. Такие двигатели подходят для длительной постоянной работы в приводах насосов, вентиляторов, компрессоров, генераторов – устройств, которые используются практически на каждом промышленном производстве. Конструктивная сложность таких двигателей окупается их высоким КПД и экономичностью.
Такие двигатели подходят для длительной постоянной работы в приводах насосов, вентиляторов, компрессоров, генераторов – устройств, которые используются практически на каждом промышленном производстве. Конструктивная сложность таких двигателей окупается их высоким КПД и экономичностью.
Фото: концерн «Автоматика»
В основе работы синхронного электродвигателя лежит знакомый всем по урокам физики эффект отталкивания одноименных магнитных полюсов. Не погружаясь в терминологию, эту работу можно описать так: стационарная и движущаяся части устройства отталкиваются друг от друга, в результате чего получается полезный крутящий момент, то есть электрическая энергия превращается в механическую.
Принципиальная конструкция любого электродвигателя такова: неподвижная часть (статор), подвижная часть (ротор), ось ротора с подшипниками, корпус и провода. Нужно упомянуть, что электродвигатели бывают постоянного и переменного тока, последние в свою очередь делятся на асинхронные и синхронные.
Как работает синхронный двигатель
Чтобы получить полезное действие, практически в любой электротехнике, где движение вызывается благодаря электромагнитному полю, применяется закон Ампера. Именно Мари Ампер в 1820 году установил, что между двумя параллельными проводниками, подключенными к постоянному току, действует притяжение, если токи однонаправленные, или отталкивание, если токи противоположные. Сила Ампера приводит в движение электропоезда и трамваи, двери лифтов и электрические ворота, а также заставляет звучать виброзвонок в вашем смартфоне.
Если в качестве проводника тока мы возьмем рамку и разместим ее в магнитное поле между двумя магнитами, на нее начнет действовать сила Ампера, то есть линии магнитной индукции начнут толкать проводник. Закрепив эту рамку посредством подшипников на оси, мы получим вращение.
Фото: концерн «Автоматика»
В синхронном двигателе статор создает вращающееся магнитное поле, а ротор − постоянное магнитное поле. На статоре присутствует электрическая цепь в виде обмотки, на которую подается трехфазное напряжение, создающее магнитное поле, которое вращается с синхронной скоростью. Обмотка ротора возбуждается источником питания постоянного тока, поэтому он действует как постоянный магнит. Разноименные полюса ротора будут притягиваться к соответствующим полюсам вращающегося поля статора. При таком взаимодействии возникает крутящий момент, вращающий вал. Скорость вращения будет равна частоте вращающегося магнитного поля неподвижного статора.
На статоре присутствует электрическая цепь в виде обмотки, на которую подается трехфазное напряжение, создающее магнитное поле, которое вращается с синхронной скоростью. Обмотка ротора возбуждается источником питания постоянного тока, поэтому он действует как постоянный магнит. Разноименные полюса ротора будут притягиваться к соответствующим полюсам вращающегося поля статора. При таком взаимодействии возникает крутящий момент, вращающий вал. Скорость вращения будет равна частоте вращающегося магнитного поля неподвижного статора.
Если противополюсные магниты статора и ротора совпадают, они вращаются с синхронной скоростью. Если ротор не имеет первоначального вращения, то появится отталкивающая сила, и ротор не сможет начать вращение. Таким образом синхронные двигатели – это двигатели без самозапуска.
Для запуска ротора синхронного двигателя между краями полюсов устанавливается так называемое «беличье колесо». При запуске на катушки ротора не подается напряжение, при этом электрический ток индуцируется в прутьях «колеса», и ротор начинает вращаться как в асинхронном двигателе. Когда ротор достигает максимальной скорости, на катушки ротора подается напряжение. В результате полюс ротора и статора фиксируются, и начинается синхронное движение.
Когда ротор достигает максимальной скорости, на катушки ротора подается напряжение. В результате полюс ротора и статора фиксируются, и начинается синхронное движение.
Электродвигатели широкого профиля
Разработка и выпуск синхронных двигателей – одно из направлений работы Калужского электромеханического завода (КЭМЗ) в составе концерна «Автоматика» Госкорпорации Ростех.
Двигатели из Калуги отличаются высокими коэффициентами мощности и полезного действия, повышенной надежностью и энергоэффективностью. Постоянная частота вращения в них поддерживается даже при большой механической нагрузке на вал. По сравнению с асинхронными двигателями устройства КЭМЗа имеют более широкий диапазон настроек частоты вращения, а также более выгодные массогабаритные характеристики.
Фото: Агентство регионального развития Калужской области
Именно компактные размеры и небольшой вес – до 3 кг – делают возможным в перспективе применение одной из последних разработок калужан в качестве двигателя для беспилотников вертолетного типа. Такой электродвигатель был представлен заводом Ростеха на форуме «Армия-2022». Двигатели КЭМЗа собраны полностью из российских комплектующих, что отвечает задачам импортозамещения.
Такой электродвигатель был представлен заводом Ростеха на форуме «Армия-2022». Двигатели КЭМЗа собраны полностью из российских комплектующих, что отвечает задачам импортозамещения.
Среди других направлений, в которых калужские синхронные двигатели уже зарекомендовали себя, − нефтегазовый сектор, промышленные системы вентиляции и кондиционирования, автотранспорт, ЖКХ. Для коммунальщиков инженеры КЭМЗа недавно представили новый синхронный электродвигатель для лифтов, выпускаемых Щербинским лифтостроительным заводом. Двигатель отличается тихим ходом и экономичным потреблением энергии.
О том, что калужские синхронные двигатели востребованы промышленностью, можно понять по цифрам производства. Так, в 2022 году КЭМЗ выпустил более 11 тысяч штук, нарастив объем с 2020 года примерно в два раза. В планах на текущий год – увеличить выпуск по некоторым моделям еще на 100%.
Электродвигатели Parker Hannifin
Электродвигатели Parker Hannifin представлены двигателями постоянного тока, коллекторныыми двигателями с постоянными магнитами, и двигателями переменного тока, синхронными и асинхронными с короткозамкнутым ротором.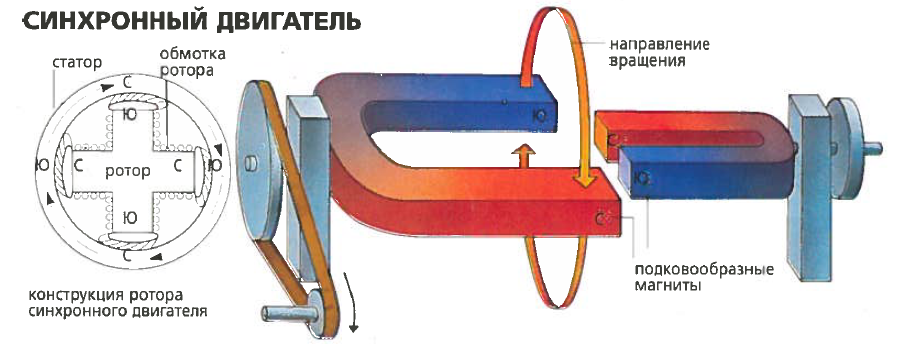
Синхронные двигатели.
Серия GVM.
Двигатели GVM являются синхронными серводвигателями переменного тока на постоянных магнитах. Достаточно большая величина крутящего момента, быстродействие и эффективность двигателей Parker Hannifin серии GVM обеспечивают требуемые условия для достижения впечатляющих рабочих характеристик во множестве платформ транспортных средств. Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Одним из знаковых применений двигателей серии GVM является использование в мотоциклах-прототипах фирмы Victory в гонке 2015 года на острове Мэн. Гонка на острове Мэн — самая длинная гонка для электромотоциклов в мире.
Двигатель Parker Hannifin серии GVM выдерживает очень высокие средние скорости порядка 200 км/ч
и обеспечивает длительную беспрерывную работу
в экстремальных температурных условиях.
Питание: 24 — 800 В DC.
Тип: синхронный, с редкоземельными магнитами.
Количество полюсов: 12.
Крутящий момент: до 376 Н·м.
Номинальная мощность: до 170 кВт.
Частота вращения: до 9800 Об/мин.
Обратная связь: резольвер, SinCos энкодер, бессенсорный.
Типоразмер: 142, 210.
Исполнение: IP67, IP6K9K (опц.).
Особенности: Отличное решения для мобильных приложений (электрокары, электромотоциклы и т.д.).
Серия NV.
Серия NV — синхронные двигатели с постоянными магнитами разработанные для высокоскоростных приложений. Высокая точность, низкий уровень вибрации и долгий срок службы обеспечивают работу при максимальной скорости вращения до 17000 об/мин. Уровень защиты корпуса: IP64, IP65, IP67 (по запросу).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 11,5 Нм.
Номинальная мощность: 0,7 — 11 кВт.
Частота вращения: 7000 — 17000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 60, 80, 110, 130.
Исполнение: IP64, IP65 (опц.).
Особенности: Подходят для высокоскоростных приложений.
Серия SMB/H/E, MB/H/E, NX.
Серии двигателей SMB/H/E, MB/H/E, NX представляют линейку синхронных двигателей с постоянными или редкоземельными магнитами.
Благодаря инновационной технологии «Salient Pole» (использование неодимового магнита — мощного постоянного магнита, состоящего из сплава редкоземельного элемента неодима, бора и железа) двигатели серии SMB/H/E, MB/H/E достигают высоких ускорений и выдерживают большие перегрузки без риска размагничивания или отрыва магнита. Совместимы со следующими сериями приводов: SLVD-N, TPD-M, HiDrive, ViX, TWIN-N/SPD-N.
Двигатели серии NX — компактные, с низкой пульсацией момента и плавным ходом, являются эффективной альтернативой традиционным индукционным двигателям. Бессенсорная версия двигателя была разработана в качестве альтернативного решения для минимизации затрат в сочетании с приводом Parker Hannifin AC650S.
Питание: 230, 400 — 480 В AC.
Тип: синхронный, с постоянными / редкоземельными магнитами.
Количество полюсов: 4 — 10.
Крутящий момент: 0,35 — 269 Нм.
Номинальная мощность: 0,2 — 67 кВт.
Частота вращения: 0 — 10000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), инк. энкодер.
Типоразмер: 40, 42, 56, 60, 70, 82, 92, 100, 105, 115, 120, 142, 145, 155,170, 205, 265.
Исполнение: IP44, IP64, IP65, IP67.
Особенности: Компактные с низкой пульсацией момента и плавным ходом.
Серия NK.
Серия NK — встраиваемые компактные бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений, обеспечивают работу при максимальной скорости вращения до 15000 об/мин.
Питание: 230, 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 90 Нм.
Номинальная мощность: 0,2 — 34 кВт.
Частота вращения: 1000 — 15000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 42, 56, 62, 80, 110, 143.
Исполнение: IP00.
Особенности: Встраиваемые, компактные, для высокоскоростных приложений.
Серия TM/TK.
Серии синхронных двигателей с постоянными магнитами TM/TK обладают высокой прочностью и обеспечивают работу в жестких условиях. Высокий крутящий момент на малых оборотах предоставляет пользователю решение для следующих приложений: прессы, миксеры, намоточные машины, экструдеры. Серия TM имеет бескорпусное исполнение.
Питание: 400 — 480 В AC.
Тип: синхронный, с постоянными магнитами / +бескорпусной.
Количество полюсов: 24 — 120.
Крутящий момент: 90 — 22100 Нм.
Номинальная мощность: 6,9 — 394 кВт.
Частота вращения: 29 — 2500 Об/мин.
Обратная связь: Endat энкодер, бессенсорный, резольвер (опц.).
Типоразмер, мм: 398, 600, 830 / 230, 385, 565, 795.
Исполнение: IP54 / IP00.
Особенности: Высокий крутящий момент на малых оборотах, для прессов, миксеров, намоточных машин, экструдеров.
Серия HKW/SKW.
Серия HKW/SKW — бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений мощностью до 230 кВт. Электродвигатели используются в приложениях, где высокий крутящий момент на низкой скорости и высокая скорость при постоянной мощности являются критичными характеристиками.
Питание: 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 4 — 16.
Крутящий момент: 3,5 — 1250 Нм.
Номинальная мощность: 2,0 — 230 кВт.
Частота вращения: 260 — 23200 Об/мин.
Обратная связь: бессенсорный, резольвер (опц.).
Типоразмер: 73, 82, 85, 91, 96, 108, 155.5, 195, 242, 310.
Исполнение: IP00.
Особенности: Встраиваемые, решения для высокоскоростных приложений.
Серия MGV.
Синхронный двигатель MGV на постоянных магнитах обеспечивает работу при максимальной скорости вращения до 45000 об/мин, используется во многих компонентах автомобильных или авиационных испытательных установок.
Питание: 400 — 480 В AC.
Тип: синхронный, на постоянных магнитах.
Количество полюсов: 4 — 16.
Крутящий момент: 6,8 — 1500 Нм.
Номинальная мощность: 15 — 500 кВт.
Частота вращения: 5000 — 45000 Об/мин.
Обратная связь: резольвер.
Типоразмер: 430, 635, 840, 860, 950, 966, A50, B40, B50.
Исполнение: IP40.
Особенности: Для высокоскоростных приложений тестовых стендов.
Серия EX/EY.
Синхронные электродвигатели EX/EY с постоянными магнитами обеспечивают работу в Зоне 2 при окружающей температуре от 40 ºC до 60 º. Оборудование соответствует стандартам ATEX, IECEx (Зона 1, 2).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 1,75 — 41 Нм.
Номинальная мощность: до 6,3 кВт.
Частота вращения: 0 — 7600 Об/мин.
Обратная связь: резольвер, энкодер (опц.) (EnDat, Hiperface), бессенсорный.
Типоразмер:, 70, 92, 120, 121, 155.
Исполнение: IP64, IP65.
Особенности: ATEX, IECEx (зона 1, 2).
Асинхронные двигатели. Серия MS/MR.
Асинхронные двигатели серии MR подходят для использования со всеми сериями приводов Parker Hannifin переменного тока. Благодаря прочной жесткой конструкции и своим рабочим характеристикам, двигатели серии MR используются в жестких условиях.
Серия MS асинхронных двигателей Parker Hannifin была специально разработана для высокодинамичных приложений и использования с приводами переменного тока Parker Hannifin, имеющими векторное управление по замкнутому контуру, а именно: AC890, AC690+. Двигатели позволяют выполнять операции на постоянной мощности при максимальной скорости вращения до 8000 об/мин. Размеры корпуса идентичны корпусу двигателя постоянного тока с аналогичной мощностью. Уровень защиты корпуса: IP23, IP54, IP55 (опционально).
Питание: 400-460 В AC.
Тип: асинхронный.
Количество полюсов: 2 — 6.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальная мощность: 0,09 — 524 кВт.
Частота вращения: 0 — 8000 Об/мин.
Обратная связь: энкодер, резольвер (опц.).
Типоразмер: MS100, MS133, MS166, MS180, MS225, MS280; 56 — 200, 180 — 355.
Исполнение: IP23, IP54, IP55.
Особенности: Решение для широкого ряда приложений.
Коллекторные двигатели. Серия RS, RX / AXEM.
Сервомоторы серии RS — малоинерционные двигатели с магнитом из редкоземельных металлов.
Серия RX представляет собой высокоинерционные двигатели с ферритовым магнитом, которые демонстрируют высокие характеристики при работе на холостом ходу. Двигатель RX является экономически эффективным решением для различных серво-приложений. Серия RX также обеспечивает работу маломощных систем в Чистых помещениях.
Сервомоторы RS/RX постоянного тока в сочетании с приводами серии RTS полностью подходят для применений, где требуется компактное решение или высокий динамический уровень.
Двигатели серии AXEM являются одними из самых распространенных серводвигателей во всем мире — парк установленного оборудования насчитывает более 2 000 000 единиц. Сервомотор обеспечивает высокую динамику и управление на низкой скорости, а также работу без шума и вибраций. Надежное и эффективное решение с низкими эксплуатационными расходами.
Питание: 14 — 178 В DC.
Тип: коллекторный с редкоземельными магнитами / с плоским ротором.
Количество полюсов: 4 / нет.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальный ток: 1,5 — 28 А.
Частота вращения: 2000 — 4800 Об/мин.
Обратная связь: тахогенератор, энкодер, резольвер.
Типоразмер: 39, 52, 58, 68, 83, 84, 97, 100, 110, 120, 140, 160, 211, 278.
Исполнение: IP20, IP40, IP54.
Особенности: Отличное управление на низкой скорости вращения, компактность, для медицинских приложений.
Видеоролик ВСП: Электромеханика Parker Hannifin.
Брошюра: Электромеханика Parker Hannifin (PDF, RU) …>>
Информационный бюллетень: Электродвигатели Parker Hannifin (PDF, RU) ..>>
Информационный бюллетень: Электромеханика Parker Hannifin (PDF, RU) …>>
Информационный бюллетень: Серводвигатели серии SMB / SMH / SME Parker Hannifin (PDF, RU) …>>
Информационный бюллетень: Серводвигатели серии MB / MH / ME Parker Hannifin (PDF, RU) …>>
Каталог: Решения для управления движением (26 MB, PDF, EN) …>>
Синхронные электродвигатели Toshiba на постоянных магнитах.
Официальный сайт.
Toshiba с гордостью представляет новые продукты для двигателей низкого напряжения с постоянными магнитами. Учитывая постоянное увеличение законодательного регулирования энергоэффективности, Toshiba предлагает высокоэффективные электродвигатели с постоянными магнитами переменного тока, разработанные для соответствия уровням эффективности IE4 и «Super Premium».
В двигателе с постоянными магнитами переменного тока используются редкоземельные неодимовые элементы в конструкции ротора. Благодаря использованию постоянных магнитов, встроенных в конструкцию двигателя переменного тока, двигатель использует одинаковую выходную мощность и высокую плотность крутящего момента с уменьшенными размерами и весом.
Узнать цены или приобрести
Категория: Низковольтные электродвигатели Toshiba
Описание
Типоразмеры и чертежи электродвигателей Toshiba Tosh-ECO™
Листовка
Описание
Синхронные (вентильные) электродвигатели на постоянных магнитах Toshiba поставляются по цене значительно меньшей, чем такие мировые бренды как ABB, Siemens и SEW, при превосходном качестве для ответственных применений. Компания СПИК СЗМА является эксклюзивным партнером Toshiba на рынке России и СНГ.
Стандартные функции
- полностью закрытый вентилятор
- повышение средней эффективности на 5-8% по сравнению с асинхронными двигателями
- высокая механическая прочность и коррозионная стойкость
- высокий КПД, соответствующий стандарту энергоэффективности IE4 по ГОСТ IEC 60034-30-1-2016
- номинальная частота сети 50 Гц
- номинальное напряжение сети (50 Гц): 400 В
- номинальные скорости (50 Гц): 1800, 3600 и 4500 об./мин.
- трехфазные электродвигатели мощностью 0,37 … 315 кВт
- сервисный фактор (коэффициент перегрузки) 1.0
- конструкция формфакторов 71 — 315 по МЭК 60072-1
- изоляция класса F; Работа с частотными преобразователями, Превосходит требования МЭК 60034-25
- соответствует глобальным стандартным спецификациям, таким как IEC60034, МЭК 60072-1 , ГОСТ Р МЭК 60204-1— 2007
- степень защиты IP55
- отсутствие скольжения, синхронная частота вращения ротора и сети питания, точный контроль скорости и положения ротора
- отсутствие потерь I2R в роторе
- вращающаяся на 90˚ клеммная коробка в верхнем положении (F-3) с двумя точками заземления дополнена пластиковым кабельным вводом и заглушкой
- подходит для высокоскоростной работы до 20%. Допускается скорость выше номинальной при постоянной мощности (за пределами максимальной скорости NEMA)
- алюминиевый корпус для типоразмеров 71 … 132
- чугунный корпус для типоразмеров 160 … 315
- возможности монтажа в любом положении до типоразмеров меньше 160. Для всех типоразмеров — горизонтальное положение монтажа
- без NAFTA квалификации
Области применения электродвигателей с постоянными магнитами Tosh-ECO™
- насосы
- вентиляторы
- компрессоры
- конвейеры
Типоразмеры и чертежи электродвигателей Toshiba Tosh-ECO™
| Мощность, кВт | Скорость, об/мин. (50 Гц) | Напряжение, В | Типоразмер | Вес, кг | Номер модели Ссылка на чертеж | Ном. ток, А | КПД, % |
|---|---|---|---|---|---|---|---|
| 0.55 | 3600 | 400 | 71M | 5 | PM1 | 1.2 | 88.0 |
| 0. 55 | 1800 | 400 | 71M | 5 | PM2 | 1.2 | 87.1 |
| 0.75 | 4500 | 400 | 71M | 5 | PM3 | 1.6 | 88.2 |
| 0.75 | 3600 | 400 | 71M | 5 | PM4 | 1.6 | 88.6 |
| 0.75 | 1800 | 400 | 71M | 6 | PM5 | 1.6 | 88.6 |
| 1.1 | 4500 | 400 | 71M | 5 | PM6 | 2.3 | 89.5 |
| 1.1 | 3600 | 400 | 71M | 6 | PM7 | 2.3 | 90.0 |
| 1.1 | 1800 | 400 | 71M | 7 | PM8 | 2.3 | 89.7 |
| 1.5 | 4500 | 400 | 71M | 6 | PM9 | 3.2 | 90.4 |
| 1.5 | 3600 | 400 | 71M | 6 | PM10 | 3.2 | 90.9 |
| 1. 5 | 1800 | 400 | 71M | 7 | PM11 | 3.2 | 89.9 |
| 1.5 | 1800 | 400 | 90L | 11 | PM12 | 3.2 | 90.9 |
| 2.2 | 4500 | 400 | 71M | 7 | PM13 | 4.6 | 91.5 |
| 2.2 | 4500 | 400 | 90L | 11 | PM14 | 4.7 | 90.0 |
| 2.2 | 3600 | 400 | 71M | 7 | PM15 | 4.5 | 91.8 |
| 2.2 | 3600 | 400 | 90L | 11 | PM16 | 4.6 | 91.3 |
| 2.2 | 1800 | 400 | 90L | 13 | PM17 | 4.5 | 91.5 |
| 3 | 4500 | 400 | 90L | 11 | PM18 | 6.4 | 91.2 |
| 3 | 3600 | 400 | 90L | 13 | PM19 | 6.3 | 91. 6 |
| 3 | 1800 | 400 | 90L | 15 | PM20 | 6.2 | 91.5 |
| 4 | 4500 | 400 | 90L | 13 | PM21 | 8.3 | 92.0 |
| 4 | 3600 | 400 | 90L | 15 | PM22 | 8.3 | 91.7 |
| 4 | 1800 | 400 | 90L | 18 | PM23 | 8.1 | 92.1 |
| 4 | 1800 | 400 | 112M | 24 | PM24 | 8.1 | 92.2 |
| 5.5 | 4500 | 400 | 90L | 15 | PM25 | 11.5 | 92.6 |
| 5.5 | 3600 | 400 | 90L | 17 | PM26 | 11.2 | 93.0 |
| 5.5 | 3600 | 400 | 112M | 24 | PM27 | 11.3 | 92.2 |
| 5.5 | 1800 | 400 | 112M | 27 | PM28 | 11. 1 | 92.8 |
| 7.5 | 3600 | 400 | 112M | 27 | PM29 | 15 | 92.8 |
| 7.5 | 1800 | 400 | 112M | 32 | PM30 | 14.9 | 93.4 |
| 11 | 3600 | 400 | 112M | 32 | PM31 | 22 | 93.6 |
| 11 | 1800 | 400 | 113M | 35 | PM32 | 22 | 93.6 |
| 11 | 1800 | 400 | 132M | 54 | PM33 | 22 | 94.2 |
| 15 | 3600 | 400 | 112M | 35 | PM34 | 29 | 93.9 |
| 15 | 3600 | 400 | 132M | 54 | PM35 | 31 | 94.0 |
| 15 | 1800 | 400 | 132M | 61 | PM36 | 29 | 94.7 |
| 18.5 | 3600 | 400 | 132M | 61 | PM37 | 37 | 94. 3 |
| 18.5 | 1800 | 400 | 132M | 68 | PM38 | 36 | 94.8 |
| 22 | 3600 | 400 | 132M | 68 | PM39 | 44 | 94.4 |
| 30 | 3600 | 400 | 132M | 75 | PM40 | 58 | 94.7 |
Листовка
28.2. Управление скоростью двигателя переменного тока
12/12/2014
0 Комментарии
(* в предыдущем параграфе речь шла об управлении двигателями постоянного тока)
Работа двигателей переменного тока основана на явлении вращения магнитного поля, создаваемого набором стационарных обмоток (называемых обмотками статора), питаемых источником переменного тока с разными фазами. Этот эффект похож на поведение мигающих «бегущих огоньков» в гирлянде, которые создают впечатление «движения» в одном направлении. Если наборы обмоток запитать подобным образом (каждая обмотка достигает пика напряженности поля в разное время относительно соседних) то эффект будет похож на движение магнитного поля в одном направлении. Если эти обмотки расположены по кругу, то движущееся магнитное поле будет вращаться вокруг центра этого круга, как это проиллюстрировано следующими изображениями (читайте слева направо и сверху вниз, как будто вы читаете слова в предложении):
Любой намагниченный предмет, помещенный в центр круга, будет пытаться вращаться с той же угловой частотой, что и магнитное поле. Синхронный двигатель переменного тока использует этот принцип, когда его намагниченный ротор движется с точно той же скоростью, что и магнитное поле.
В любом электропроводящем предмете (проводнике), помещенном в центр круга, будет возникать индукция при изменении направления магнитного поля вокруг этого проводника. Поле будет индуцировать электрические токи внутри проводника, которые, в свою очередь, будут действовать против вращающегося магнитного поля таким образом, что предмет будет «гнаться» за полем, всегда чуть отставая. Индукционный двигатель переменного тока работает по этому принципу, когда его ненамагниченный (но электропроводящий) ротор вращается со скоростью немного меньшей, чем синхронная скорость* вращающегося магнитного поля.
*Разность этих скоростей называется скоростью скольжения, в русскоязычной литературе применяется термин скольжение, определяющий относительную разность.
Скорость вращения магнитного поля прямо пропорциональна частоте источника переменного тока и обратно пропорциональна числу полюсов в статоре:
S = 120f / n
S – синхронная скорость вращающегося магнитного поля в оборотах в минуту
f – частота в герцах
n – число полюсов статора на одно фазу (простейший возможный индукционный двигатель имеет два полюса)
Отношение между синхронной скоростью, частотой и числом полюсов можно понять по аналогии с «бегущими огоньками»: скорость каждого огонька в гирлянде – это функция частоты мигания и числа лампочек на единицу длины. Если число лампочек удвоить, расположив дополнительные лампочки между имеющимися (так чтобы длина гирлянды не изменилась), видимая скорость сократится вдвое: с сокращением расстояния между парами лампочек потребуется больше циклов («миганий») чтобы «пробежать» гирлянду первоначальной длины. Таким же образом, статор с бОльшим числом полюсов на его окружности требует бОльшего числа циклов от источника питания для совершения магнитным полем полного оборота.
Синхронный двигатель переменного тока вращается с точно такой же скоростью, что и магнитное поле: пример из практики – четырехполюсный синхронный двигатель, вращающийся с 1800 оборотами в минуту с приложенным питанием частотой 60 Гц. Индукционный двигатель будет вращаться немного медленней магнитного поля: например, индукционный двигатель вращающийся с 1720 об/мин при питающей частоте 60 Гц (т.е. 80 об/мин – скорость скольжения). Индукционные двигатели проще в производстве и обслуживании, что делает их наиболее популярными из двух типов двигателей, применяемых в промышленности.
В случае когда при производстве статора двигателя число обмоток фиксировано*, частоту источника питания мы можем изменять при помощи электронной схемы. Высокомощная схема, разработанная для изменения частоты питания двигателей переменного тока называется частотным преобразователем (ЧП), а вместе с самим двигателем — частотно-регулируемым приводом (ЧРП).
* существуют многоскоростные двигатели с выбираемым числом полюсов. Например, двигатель с дополнительным числом обмоток статора, который подключается по 4-полюсной схеме для высокой скорости, и по 8-полюсной для низкой. Если нормально нагруженный двигатель имеет на «высокой скорости» 1740 об/мин, то на «низкой» в два раза меньше – 870 об/мин. При фиксированной частоте питания этот двигатель будет иметь только две возможные скорости
Частотно-регулируемые приводы крайне полезны, они позволяют обычному двигателю с фиксированным числом полюсов обеспечивать необходимую мощность в широком диапазоне скоростей. К достоинствам ЧРП следует отнести уменьшение электропотребления (двигатель вращается так быстро как это требуется, а не на полную), уменьшение вибрации (меньше скорость=меньше вибрация, хотя существуют и резонансные явления), возможность плавного разгона и торможения для сокращения износа механических составляющих в результате ускоряющих сил.
Другой чертой, присущей большинству частотно-регулируемых приводов является возможность активного торможения нагрузки — это когда ЧРП заставляет двигатель прикладывать отрицательный момент к нагрузке для её замедления. Некоторые частотные преобразователи для энергосбережения позволяют рекуперировать кинетическую энергию в течение процесса торможения.
Преобразователи частоты содержат электронные компоненты преобразующие входное переменное питание с постоянной частотой в выходное с переменной частотой (и напряжением). В преобразователе обычно имеется три различных блока. Выпрямитель использует диоды для преобразования переменного напряжения в постоянное. Фильтр сглаживает выпрямленное напряжение, т.к. оно имеет пульсации. И наконец, инвертор преобразует отфильтрованное постоянное напряжение обратно в переменное, только на этот раз с уровнями напряжения и частоты необходимыми для желаемой скорости вращения двигателя.
Упрощенная схема для частотного преобразователя показана ниже, выпрямитель слева (преобразует переменное напряжение в постоянное), фильтрующий конденсатор сглаживает выпрямленное напряжение, и транзисторный мост превращает постоянное напряжение в переменное с необходимой частотой*. Схема управления транзисторами опущена для упрощения:
*Обратите внимание на обратно-включенные диоды между стоком и истоком каждого из транзисторов. Эти диоды служат для защиты транзисторов от обратного напряжения, но они также позволяют двигателю «возвращать» энергию назад в шину постоянного тока (действуя как генератор) когда скорость вращения двигателя превышает скорость вращения магнитного поля, что может происходить когда привод дает двигателю команду на останов. При добавлении некоторых компонентов это приводит к некоторым интересным возможностям, таким как регенеративное торможение.
Как и в приводах двигателей постоянного тока, силовые транзисторы в частотных преобразователях быстро включаются и отключаются с меняющейся скважностью. Однако в отличии от приводов постоянного тока, переключения силовых транзисторов в преобразователях частоты должны быть очень быстрыми чтобы синтезировать синусоиду переменного тока из постоянного, получаемого с шины после выпрямителя. В электронных схемах приводов постоянного тока скважность ШИМ определяет текущую мощность двигателя, и поэтому она остаётся постоянной пока от двигателя требуется постоянная мощность. Но с частотными преобразователями дела обстоят иначе: коэффициент заполнения (величина, обратная к скважности) должен изменяться от нуля до максимума и обратно до нуля, генерируя таким образом ток синусоидальной формы для работы двигателя.
Соответствие между генерируемым быстроменяющимся ШИМ-сигналом и синусоидой показано на рисунке:
Эта концепция быстро переключающихся в соответствии с ШИМ транзисторов позволяет приводу «нарезать» любые произвольные формы сигналов из отфильтрованного постоянного напряжения, получаемого от выпрямителя. Фактически можно синтезировать любую частоту (сверху ограничена максимальной частотой импульсов ШИМ) и любое напряжение (максимум определяется напряжением шины постоянного тока), что даёт ЧРП работать в широком диапазоне скоростей.
Не смотря на то, что управление частотой – это ключ к управлению скоростью синхронного или индукционного двигателя, самого по себе его не достаточно. В то время как скорость двигателя переменного тока является прямой функцией частоты (она по сути определяет то, как быстро магнитное поле вращается по окружности статора), момент почти пропорционален току в обмотках статора. А поскольку обмотки статора по своей природе являются индуктивностями, то их реактивное сопротивление будет описываться формулой XL=2πfL. Поэтому при росте частоты реактивное сопротивление растет пропорционально. Этот рост реактивного сопротивления в свою очередь приводит к падению тока в статоре (при условии, что напряжение остается постоянным при увеличении частоты). Это может стать причиной чрезмерного падения момента на высоких скоростях или его превышения (а вследствие и перегрева статора!) на низких. По этой причине переменное напряжение приложенное ПЧ к двигателю обычно делают прямо пропорциональным частоте, в результате чего ток в статоре будет оставаться в необходимых рабочих пределах во всём диапазоне скоростей ЧРП. Это соотношение называют «V/F» -, «V/Hz» — отношением, или скалярной характеристикой.
Возьмём в качестве примера ЧРП, запрограммированный на постоянное отношение «V/F». Если на полной скорости (50 Гц) выходное напряжение на двигатель составляет 380 В, тогда выходное напряжение будет равно 190 В на половине скорости (25 Гц), и 95 В на четверти максимальной скорости (12,5 Гц).
ЧРП производятся для управления промышленными двигателями широкого диапазона типоразмеров и мощностей. Некоторые ЧП малы и могут уместиться в вашу руку, другие огромны и для их транспортировки требуются грузовые вагоны. На следующей фотографии показана пара частотников Allen-Bradley среднего размера (около 75 кВт каждый, 1,2 м в высоту), используемых для управления насосами для сточных вод фабрики:
Частотно-регулируемые приводы двигателей переменного тока не требуют обратной связи по скорости, которая необходима приводам для регулирования скорости двигателей постоянного тока. Причина этого очень проста: управляемой переменной в приводах переменного тока является частота питания двигателя, а вращаемые магнитным полем двигатели по своей природе являются частотно-управляемыми машинами.
Например, четырехполюсный индукционный двигатель, питаемый частотой 60 Гц, имеет номинальную скорость 1728 об/мин (при условии 4% скольжения). Если ЧРП выдает на двигатель переменный ток частотой 30 Гц, то скорость этого двигателя будет приблизительно равна половине номинального значения или 864 об/мин. Двигателю переменного тока действительно не требуется обратная связь от датчика скорости, потому что реальная скорость двигателя всегда будет ограничена выходной частотой привода. Управление частотой – это управление скоростью двигателя для синхронных и индукционных двигателей переменного тока, поэтому обратная связь от тахогенератора не является необходимой для того, чтобы приблизительно* «узнать» как быстро крутится двигатель. Отсутствие необходимости обратной связи по скорости для приводов переменного тока устраняет потенциальную угрозу безопасности, общую для всех приводов постоянного тока: вероятность «выбега» в случае потери приводом сигнала обратной связи от датчика скорости, при котором на двигатель подается полная мощность.
Как и с приводами постоянного тока, цепи ЧРП являются источниками мощного электрического шума. Прямоугольные импульсы, создаваемые быстрыми переключениями силовых полупроводниковых устройств, эквивалентны бесконечным рядам высокочастотных синусоидальных волн (эту эквивалентность, известную как ряды Фурье, математически доказал Жан Батист Жозеф Фурье (1768-1830)), некоторые из которых могут иметь достаточно высокую частоту для самостоятельного распространения в пространстве в виде электромагнитных волн. Эти электромагнитные помехи могут быть довольно интенсивными в случае высокомощных цепей промышленных приводов. По этой причине настоятельно не рекомендуется прокладывать любые силовые моторные кабели или кабели, питающие переменным током схемы приводов, рядом с сигнальными или управляющими проводами, т.к. создаваемый шум будет нарушать работу любых систем, использующих эти низкоуровневые сигналы.
Электромагнитный шум от силовых кабелей переменного тока может быть уменьшен пропусканием переменного тока через цепи низкочастотных фильтров, называемых сетевыми дросселями, расположенных вблизи привода. Эти сетевые дроссели, содержащие катушки индуктивности с ферромагнитными сердечниками, соединенные последовательно с приводом, блокируют высокочастотный шум, не давая ему вернуться назад к источнику переменного тока, где он может оказать влияние на другое электронное оборудование. Меньшее, что может быть сделано с электромагнитным шумом между приводом и двигателем — это экранирование кабелей хорошо заземленным кабелепроводом.
0 Комментарии
Электротехника
Электротехника
Оглавление
|
Синхронные двигатели, прямой привод, реверсивный синхронный двигатель
Показать только в наличии
Просмотр результатов:
Синхронные двигатели представляют собой распространенный вид электродвигателей, питающихся от переменного тока. У нас есть сотни вариантов на выбор здесь, в RS, и мы являемся главным авторизованным дистрибьютором компонентов в Северной Америке, поэтому вы можете быть уверены, что мы сможем поставить детали, подходящие для вашего проекта.
У нас есть синхронные двигатели от ряда ведущих производителей, включая Siemens, Schneider Electric и Crouzet, и вы можете быть уверены, что все детали соответствуют самым высоким отраслевым стандартам.
Читайте дальше, чтобы узнать больше о синхронных двигателях, их различных типах, для каких областей применения они наиболее подходят и почему вы можете положиться на компанию RS, которая предоставит вам необходимые компоненты.
Что такое синхронные двигатели и как они работают?
Как и все электродвигатели, синхронные двигатели преобразуют электрическую энергию в механическую. Для этого вал двигателя вращается со скоростью, синхронизированной с частотой подаваемого переменного тока. Создаваемое магнитное поле помогает генерировать крутящий момент, который обеспечивает движение приложения.
Синхронные двигатели отличаются от асинхронных тем, что они вращаются с той же скоростью, что и частота сети. Однако в асинхронных двигателях магнитное поле ротора вращается немного медленнее, чем поле статора.
Какие существуют типы синхронных двигателей?
Существует несколько различных типов синхронных двигателей, и в целом их можно разделить на реактивные, с постоянными магнитами и с гистерезисом.
- Реактивные двигатели имеют зубья на роторе, которые фиксируются и позволяют ему вращаться с той же скоростью, что и магнитное поле.
- Как следует из названия, синхронные двигатели с постоянными магнитами имеют магниты, встроенные в ротор, которые создают постоянно присутствующее магнитное поле. Двигатели с прямым приводом представляют собой разновидность синхронных двигателей с постоянными магнитами. В них меньше движущихся частей, что повышает эффективность и срок службы компонента.
- Гистерезисные двигатели имеют гладкий ротор из высокоуглеродистой стали, который можно намагничивать и размагничивать. Синхронные двигатели с гистерезисом, как правило, используются в приложениях с низкой номинальной мощностью.
Где используются синхронные двигатели?
Двигатели с прямым приводом и другие синхронные двигатели чаще всего используются в приложениях, где важны точность и точность синхронизации. Некоторые повседневные примеры из них включают аналоговые часы, магнитофоны и таймеры.
Почему именно RS для ваших синхронных двигателей?
Обращаетесь ли вы в RS за синхронными двигателями или любыми другими компонентами, будьте уверены, что у нас есть только продукция самого высокого качества, отвечающая отраслевым стандартам. У нас есть синхронные двигатели от таких компаний, как Siemens, Nidec Motors и Schneider Electric, и, как ведущий авторизованный дистрибьютор в Северной Америке, вы можете рассчитывать на то, что мы доставим то, что вам нужно, и когда вам это нужно.
Для двигателей с прямым приводом и других сопутствующих товаров не ищите ничего, кроме RS. Если у вас есть какие-либо вопросы, пожалуйста, свяжитесь с нами, и мы сделаем все возможное, чтобы указать вам правильное направление. Кроме того, вы также можете найти множество полезных советов и советов в нашем экспертном центре.
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В перем. тока при 60 Гц, 7 Вт, 4 об/мин, 218 унций на дюйм при 175 л.с./с, 0,68, T
Производитель Номер по каталогу: 2602-012
Номер по каталогу RS: 70030121
В наличии:
121
+1
$168,52
/ шт.
+3
$154,49
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, A, 300 об/мин, 115 В переменного тока, 3 Вт, крутящий момент 2 унции дюйма
Производитель Деталь №: 3001-001
Номер по каталогу RS: 70259512
В наличии:
11
+1
$53,94
/ шт.
+3
52,26 доллара США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В перем. тока при 60 Гц, 7 Вт, 10 об/мин, 180 унций на дюйм при 175 имп/с, 0,68, T
Производитель Деталь №: 2602-006
Номер по каталогу RS: 70030123
В наличии:
117
+1
$161,13
/ шт.
+3
152,34 доллара США
/ шт.
+5
139,64 доллара США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В переменного тока при 60 Гц, 10 Вт, 60 об/мин, 41 унция/дюйм при 175 имп/с, 0,82, 10
Производитель Номер по каталогу: 3204-024
Номер по каталогу RS: 70030129
В наличии:
209
+1
$118,08
/ шт.
+3
$111,63
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В перем. тока при 60 Гц, 7 Вт, 6 об/мин, 210 унций на дюйм при 175 п/с, 0,68, T
Производитель Артикул №: 2602-013
Номер артикула RS: 70030122
В наличии:
25
+1
227,89 долларов США
/ шт.
+3
$ 217,07
/ шт.
+5
199,70 долларов США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, PA, 59 мм, 300 об/мин, 115 В переменного тока, крутящий момент 8,5 унций дюйма
Производитель Деталь №: 3201-001
Номер артикула RS: 70249982
В наличии:
2
+1
$135,43
/ шт.
+3
129,19 долларов США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронизация, прямой привод, Mod T, 60 мм, 300 об/мин, 115 В переменного тока, 7 Вт, крутящий момент 8,5 (унция-дюйм)
Производитель Номер по каталогу: 2601-001
Номер по каталогу RS: 70274604
В наличии:
60
+1
$244,03
/ шт.
+3
231,81 долл. США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, 59 мм, 600 об/мин, 115 В переменного тока при 60 Гц, крутящий момент 5,5 унций на дюйм
Производитель Артикул №: 3203-001
Номер артикула RS: 70228537
В наличии:
2
+1
$134,71
/ шт.
+3
128,75 долларов США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, 35 мм, 300 об/мин, 115 В переменного тока при 60 Гц, крутящий момент 1,5 унции дюйма
Производитель Деталь №: LYD35115D
RS Stk №: 70030208
В наличии:
1
+1
24,96 доллара США
/ шт.
+3
23,85 доллара США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, прямой привод, 49 мм, синхронизация, 600 об/мин, 115 В переменного тока, 5 Вт, крутящий момент 2,3, AB
Производитель Деталь №: 3005-001
Номер по каталогу RS: 70238557
В наличии:
16
+1
$89,81
/ шт.
+3
$85,67
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, 42 мм, 300 об/мин, 24 В переменного тока при 60 Гц, крутящий момент 4 унции дюйма, 4 Вт
Производитель Деталь №: LYD42024D
Номер по каталогу RS: 70030209
В наличии:
9
+1
20,63 доллара США
/ шт.
+3
19,61 доллара США
/ шт.
+5
$18,63
/ шт.
+25
17,70 долларов США
/ шт.
больше
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, 55 мм, 24 В переменного тока, 300 об/мин, 5 Вт, крутящий момент 6,5 унций дюйма
Производитель Деталь №: LYD55T024DL
RS Stk №: 70245259
В наличии:
95
1
$36,33
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Сименс
МОТОР
Производитель Деталь №: 1FK70422AF711RA2
Номер по каталогу RS: 72193200
В наличии:
1
+1
4 177,55 долларов США
/ шт.
+5
3960,64 долларов США
/ шт.
+10
3765,15 долларов США
/ шт.
+25
3588,04 долларов США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Сименс
МОТОР
Производитель Деталь №: 1FK70632AF711RG2
Номер по каталогу RS: 72193201
В наличии:
1
+1
4933,08 долларов США
/ шт.
+5
4676,95 долларов США
/ шт.
+10
4446,09 долларов США
/ шт.
+25
4 236,97 долларов США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, 42 мм, 300 об/мин, 115 В переменного тока при 60 Гц, крутящий момент 4 унции дюйма, 4 Вт
Производитель Деталь №: LYD42115D
RS Stk №: 70030186
В наличии:
23
+1
29,54 доллара США
/ шт.
+3
28,23 доллара США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Крузе
Синхронный реверсивный двигатель переменного тока, 1 об/мин, 240 В
Производитель Номер по каталогу: 80547020
Номер по каталогу RS: 70520293
В наличии:
1
1
$364,78
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, модель серии LYG35
Производитель Деталь №: LYG35115F70P
RS Stk №: 70672866
В наличии:
0
+1
$111,86
/ шт.
+3
$106,92
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В переменного тока, 60 Гц, 5 Вт, 10 об/мин, 88 унций на дюйм, 175 л.с./с, 0,5
Производитель Артикул №: 3006-004
Номер артикула RS: 70030190
В наличии:
0
+1
$155,27
/ шт.
+3
148,42 доллара США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, прямой привод, AB, 49 мм, 600 об/мин, 24 В переменного тока, крутящий момент 2,3 унции дюйма
Производитель Артикул №: 3005-003
Номер артикула RS: 70279163
В наличии:
0
+1
$78,81
/ шт.
+3
$75,33
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Вы можете сравнить не более 5 предметов.
Херст (Nidec Motors)
Двигатель, синхронный, 115 В перем. тока при 60 Гц, 5 Вт, 20 об/мин, 44 унции/дюйм при 175 имп/с, 0,5, 30
Производитель Артикул №: 3006-007
Номер артикула RS: 70030117
В наличии:
0
1
165,29 долларов США
/ шт.
0 сейчас в корзине
Ошибка при обновлении корзины
Показано 20
из 5331 результатов
404 — СТРАНИЦА НЕ НАЙДЕНА
Почему я вижу эту страницу?
404 означает, что файл не найден. Если вы уже загрузили файл, имя может быть написано с ошибкой или файл находится в другой папке.
Другие возможные причины
Вы можете получить ошибку 404 для изображений, поскольку у вас включена защита от горячих ссылок, а домен отсутствует в списке авторизованных доменов.
Если вы перейдете по временному URL-адресу (http://ip/~username/) и получите эту ошибку, возможно, проблема связана с набором правил, хранящимся в файле .htaccess. Вы можете попробовать переименовать этот файл в .htaccess-backup и обновить сайт, чтобы посмотреть, решит ли это проблему.
Также возможно, что вы непреднамеренно удалили корневую папку документа или вам может потребоваться повторное создание вашей учетной записи. В любом случае, пожалуйста, немедленно свяжитесь с вашим веб-хостингом.
Вы используете WordPress? См. Раздел об ошибках 404 после перехода по ссылке в WordPress.
Как найти правильное написание и папку
Отсутствующие или поврежденные файлы
Когда вы получаете ошибку 404, обязательно проверьте URL-адрес, который вы пытаетесь использовать в своем браузере. Это сообщает серверу, какой ресурс он должен использовать попытка запроса.
http://example.com/example/Example/help.html
В этом примере файл должен находиться в папке public_html/example/Example/
Обратите внимание, что CaSe важен в этом примере. На платформах с учетом регистра 9Пример 0005 e и пример E не совпадают.
Для дополнительных доменов файл должен находиться в папке public_html/addondomain.com/example/Example/, а имена чувствительны к регистру.
Неработающее изображение
Если на вашем сайте отсутствует изображение, вы можете увидеть на своей странице поле с красным размером X , где отсутствует изображение. Щелкните правой кнопкой мыши X и выберите «Свойства». Свойства сообщат вам путь и имя файла, который не может быть найден.
Это зависит от браузера. Если вы не видите на своей странице поле с красным X , попробуйте щелкнуть правой кнопкой мыши на странице, затем выберите «Просмотреть информацию о странице» и перейдите на вкладку «Мультимедиа».
http://example.com/cgi-sys/images/banner.PNG
В этом примере файл изображения должен находиться в папке public_html/cgi-sys/images/ пример. На платформах с учетом регистра символов PNG и png не совпадают.
Ошибки 404 после перехода по ссылкам WordPress
При работе с WordPress ошибки 404 Page Not Found часто могут возникать, когда была активирована новая тема или когда были изменены правила перезаписи в файле .htaccess.
Когда вы сталкиваетесь с ошибкой 404 в WordPress, у вас есть два варианта ее исправления.
Вариант 1. Исправьте постоянные ссылки
- Войдите в WordPress.
- В меню навигации слева в WordPress нажмите Настройки > Постоянные ссылки (Обратите внимание на текущую настройку. Если вы используете пользовательскую структуру, скопируйте или сохраните ее где-нибудь.)
- Выберите По умолчанию .
- Нажмите Сохранить настройки .
- Верните настройки к предыдущей конфигурации (до того, как вы выбрали «По умолчанию»). Верните пользовательскую структуру, если она у вас была.
- Нажмите Сохранить настройки .
- Отредактируйте файл на своем компьютере и загрузите его на сервер через FTP
- Использовать режим редактирования программы FTP
- Использовать SSH и текстовый редактор
- Используйте файловый менеджер в cPanel
- Войдите в cPanel.
- В разделе «Файлы» щелкните значок File Manager .
- Установите флажок для Корень документа для и выберите доменное имя, к которому вы хотите получить доступ, из раскрывающегося меню.
- Убедитесь, что установлен флажок Показать скрытые файлы (dotfiles) «.
- Нажмите Перейти . Файловый менеджер откроется в новой вкладке или окне.
- Найдите файл .htaccess в списке файлов. Возможно, вам придется прокрутить, чтобы найти его.
- Щелкните правой кнопкой мыши файл .htaccess и выберите Редактировать код в меню. Кроме того, вы можете щелкнуть значок файла .htaccess, а затем Редактор кода Значок вверху страницы.
- Может появиться диалоговое окно с вопросом о кодировании. Просто нажмите Изменить , чтобы продолжить. Редактор откроется в новом окне.
- При необходимости отредактируйте файл.
- Когда закончите, нажмите Сохранить изменения в правом верхнем углу. Изменения будут сохранены.
- Протестируйте свой веб-сайт, чтобы убедиться, что ваши изменения были успешно сохранены. Если нет, исправьте ошибку или вернитесь к предыдущей версии, пока ваш сайт снова не заработает.
- После завершения нажмите Закрыть , чтобы закрыть окно диспетчера файлов.
- n с: синхронная скорость в об/мин
- f: частота сетевого напряжения в Гц
- p: количество полюсов
- с = скольжение
- n с = синхронная скорость
- n a = фактическая скорость
- Обеспечивают высокоэффективное преобразование энергии переменного тока в механическую энергию
- Работа с опережающим или единичным коэффициентом мощности, что обеспечивает коррекцию коэффициента мощности
- Обеспечивает полную защиту электродвигателя при пуске
- Применяет возбуждение постоянного поля в нужное время
- Удаляет возбуждение поля при вытягивании ротора (максимальный крутящий момент)
- Защищает короткозамкнутую обмотку электродвигателя от теплового повреждения при асинхронном режиме
- Двигатель переменного тока общего назначения с нормальными пусковыми моментами и токами, а также малым скольжением
- Двигатели переменного тока фракционного многофазного тока, как правило, конструкции B
- Поскольку конструкция B имеет падающие характеристики, многофазный двигатель переменного тока с таким же аварийным или максимальным крутящим моментом, как у однофазного двигателя переменного тока, не может достичь той же точки скорости-момента для скорости с полной нагрузкой, что и однофазный пользовательский двигатель переменного тока. конструкции двигателя
- Опрокидывающий крутящий момент должен быть выше для сопоставимых скоростей при полной нагрузке (минимум 140 % опрокидывающего крутящего момента однофазных двигателей переменного тока общего назначения)
- Высокий пусковой момент при нормальном пусковом токе и малом скольжении
- Используется при высоких пусковых нагрузках при пуске, но обычно работает при номинальной полной нагрузке
- Не требует высоких перегрузок после достижения рабочей скорости
- Высокое скольжение, позволяющее снижать скорость при колебаниях нагрузки
- Низкий пусковой ток
- Низкая скорость полной нагрузки
- Эту конструкцию можно разделить на несколько подгрупп, которые различаются по проскальзыванию или форме кривой скорость-момент
- Низкий пусковой момент
- Низкий пусковой ток
- Низкое скольжение
- Изготовители двигателей на заказ изготавливают двигатели переменного тока для получения низкого тока при заторможенном роторе
- Заблокированный ротор и низкий крутящий момент
- Двигатели обычно используются при низком пусковом моменте и отсутствии высоких перегрузок после достижения рабочей скорости
- 3600/1800 об/мин (2/4 полюса)
- 1800/900 об/мин (4/8 полюсов)
- 1200/600 об/мин (6/12 полюсов)
- Переменная крутящий момент : Эти двигатели переменного тока имеют характеристики скорость-момент, которые зависят от квадрата скорости. Например, электродвигатель с частотой вращения 1800/900 об/мин, развивающий мощность 10 л.с. при 1800 об/мин, производит 2,5 л.с. при 900 об/мин. Поскольку двигатели переменного тока сталкиваются с нагрузками, такими как центробежные насосы, вентиляторы и воздуходувки, их требуемый крутящий момент зависит от квадрата или куба скорости. Эта характеристика двигателя в целом достаточна.
- Постоянная крутящий момент : Эти двигатели переменного тока могут развивать одинаковый крутящий момент на каждой скорости. В результате выходная мощность напрямую зависит от скорости. Например, двигатель переменного тока мощностью 10 л.с. при 1800 об/мин производит 5 л.с. при 900 об/мин. Вы найдете эти двигатели в приложениях с требованиями постоянного крутящего момента, таких как смесители, конвейеры и компрессоры.
- Константа лошадиных сил : Эти двигатели переменного тока развивают одинаковую мощность на каждой скорости. Крутящий момент обратно пропорционален скорости. Применение таких двигателей переменного тока включает станки, в том числе дрели, фрезерные станки и токарные станки.
- Двухфазные
- Интеллектуальный конденсатор
- Постоянный разъемный конденсатор
- Заштрихованная стойка
- Эффективность от 50 до 70 процентов
- Пусковой крутящий момент в 10 раз превышает рабочий крутящий момент
- Относительно простое регулирование скорости
9index.php$ — [L]
RewriteCond %{REQUEST_FILENAME} !-f
RewriteCond %{REQUEST_FILENAME} !-d
RewriteRule . /index.php [L]
# Конец WordPress
Если ваш блог показывает неправильное доменное имя в ссылках, перенаправляет на другой сайт или отсутствуют изображения и стиль, все это обычно связано с одной и той же проблемой: в вашем блоге WordPress настроено неправильное доменное имя.
Как изменить файл .htaccess
Файл .htaccess содержит директивы (инструкции), которые сообщают серверу, как вести себя в определенных сценариях, и непосредственно влияют на работу вашего веб-сайта.
Перенаправление и перезапись URL-адресов — это две очень распространенные директивы, которые можно найти в файле . htaccess, и многие скрипты, такие как WordPress, Drupal, Joomla и Magento, добавляют директивы в .htaccess, чтобы эти скрипты могли работать.
Возможно, вам потребуется отредактировать файл .htaccess в какой-то момент по разным причинам. В этом разделе рассматривается, как редактировать файл в cPanel, но не то, что может потребоваться изменить. статьи и ресурсы для этой информации.)
Существует множество способов редактирования файла .htaccess
Самый простой способ отредактировать файл .htaccess для большинства людей — через диспетчер файлов в cPanel.
Как редактировать файлы .htaccess в файловом менеджере cPanel
Прежде чем что-либо делать, рекомендуется сделать резервную копию вашего веб-сайта, чтобы вы могли вернуться к предыдущей версии, если что-то пойдет не так.
Откройте файловый менеджер
Для редактирования файла .htaccess
Синхронные и асинхронные двигатели переменного тока, изготовленные по индивидуальному заказу
Если вы ищете исчерпывающую информацию о двигателях переменного тока, вы попали в нужное место. Заказные двигатели переменного тока делятся на две основные категории: синхронные и асинхронные. Наиболее распространенным типом асинхронного двигателя является асинхронный двигатель переменного тока, который производители двигателей изготавливают на заказ с использованием трансформатора переменного тока с вращающейся вторичной обмоткой. В этом типе двигателя первичная обмотка, или статор, подключается к источнику питания, в то время как короткозамкнутый вторичный элемент, или ротор, несет индуцированный вторичный ток. Воздействие токов ротора на поток в воздушном зазоре создает крутящий момент. С другой стороны, асинхронный двигатель относится к отдельному классу двигателей переменного тока из-за различий в конструкции и рабочих характеристиках. Sinotech предлагает надежный каталог двигателей, изготовленных нашими производителями двигателей переменного тока, которые могут быть адаптированы к вашим точным спецификациям.
Узнайте последние новости о двигателях переменного тока в нашем блоге.
Асинхронные и синхронные двигатели переменного тока
Обзор асинхронных двигателей переменного тока
Асинхронные двигатели переменного тока
Все асинхронные двигатели являются асинхронными двигателями. Как одни из самых простых и надежных электродвигателей, асинхронные двигатели переменного тока имеют две основные электрические сборки: статор с обмоткой и узел ротора. Двигатель получил свое название от токов, втекающих в ротор, которые индуцируют переменные токи, протекающие в первичном элементе или статоре. Комбинированные магнитные эффекты токов статора и ротора создают силу, необходимую для создания вращения.
Электродвигатели переменного тока, в том числе асинхронные двигатели переменного тока, имеют роторы с пластинчатыми цилиндрическими железными сердечниками с прорезями для приема проводников. Наиболее распространенный тип ротора, производимого производителями двигателей переменного тока, иногда называют «беличьей клеткой», который имеет литые алюминиевые проводники и короткозамыкающие торцевые кольца. Беличья клетка вращается, когда движущееся магнитное поле создает ток в укороченных проводниках.
В двигателе переменного тока скорость, с которой вращается магнитное поле, называется синхронной скоростью (n с ). Эта скорость определяется количеством полюсов статора и частотой источника питания. Формула для расчета синхронной скорости двигателя переменного тока: n с = 120f/p.
Синхронная скорость — это абсолютный верхний предел скорости двигателя переменного тока. Если ротор вращается с той же скоростью, что и вращающееся магнитное поле, проводники ротора не пересекают силовые линии и не создают крутящего момента.
При работе двигателя переменного тока ротор всегда вращается медленнее, чем магнитное поле. Скорость ротора достаточно мала, чтобы вызвать надлежащую величину тока ротора, чтобы результирующий крутящий момент был достаточным для управления нагрузкой и преодоления потерь на аэродинамическое сопротивление и трение.
Разница скоростей между ротором двигателя переменного тока и магнитным полем называется «скольжением». Скольжение — это процент от синхронной скорости. Формула для расчета скольжения: s = 100 (n s – n а )/n с .
Синхронные двигатели Обзор
Синхронные двигатели имеют особую конструкцию ротора, которая позволяет им вращаться с той же скоростью, что и поле статора. Другими словами, они работают в абсолютной синхронизации с частотой сети. К основным типам синхронных двигателей относятся двигатели без возбуждения и двигатели с возбуждением от постоянного тока. Подобно асинхронным двигателям переменного тока, скорость синхронных двигателей определяется количеством пар полюсов. Он рассчитывается по соотношению частоты линии.
Производители электродвигателей на заказ проектируют синхронные электродвигатели различных типоразмеров, от субдробных двигателей с автовозбуждением до мощных двигателей переменного тока с возбуждением постоянного тока для промышленных приводов. В диапазоне долей мощности синхронные двигатели обеспечивают точную постоянную скорость.
При применении к промышленным нагрузкам синхронные двигатели с большой мощностью выполняют две важные функции:
Синхронные электродвигатели без возбуждения
Производители двигателей переменного тока создают электродвигатели без возбуждения, используя конструкции с реактивным сопротивлением и гистерезисом. Они используют схему самозапуска и не требуют внешнего источника возбуждения.
Синхронные электродвигатели с возбуждением от постоянного тока
Электродвигатели с возбуждением от постоянного тока доступны в размерах более 1 л.с. Для работы им требуется постоянный ток, подаваемый через контактные кольца для возбуждения. Двигатель получает постоянный ток от отдельного источника или генератора постоянного тока, подключенного к валу двигателя переменного тока.
Однофазные и многофазные синхронные двигатели должны приводиться в движение или их ротор должен быть подключен в виде цепи самозапуска для запуска. Поскольку поле электродвигателя вращается с синхронной скоростью, электродвигатель должен быть ускорен, прежде чем он сможет войти в синхронизм. Разгон с нулевой скорости требует проскальзывания до достижения синхронизма. Следовательно, важно использовать отдельные средства для начала.
В самозапускающихся электродвигателях переменного тока, изготовленных по индивидуальному заказу, типоразмера fhp используются методы пуска, общие для асинхронных электродвигателей, такие как расщепленная фаза, пуск с конденсатором, пуск с отталкиванием и пуск с экранированным полюсом. Двигатели автоматически переключаются в синхронный режим из-за электрических характеристик.
В двигателях с возбуждением от постоянного тока для запуска используется короткозамкнутая обмотка, называемая амортизирующей или демпферной обмоткой. Между прочим, низкий пусковой момент двигателя и потребность в источнике питания постоянного тока требуют пусковой системы, которая:
Крутящий момент в электродвигателях с возбуждением постоянным током
Тяговый момент
Тяговый момент электродвигателя определяется как минимальный крутящий момент, создаваемый от состояния покоя до точки втягивания. Этот крутящий момент должен превышать крутящий момент нагрузки настолько, чтобы поддерживать удовлетворительную скорость ускорения при нормальных условиях напряжения.
Момент реактивного сопротивления
Момент реактивного сопротивления двигателя является результатом заметности полюсных наконечников ротора, что является предпочтительным направлением намагничивания. Он пульсирует на скоростях ниже синхронных.
Момент сопротивления влияет на моменты втягивания и вытягивания двигателя, поскольку невозбужденный явнополюсный ротор стремится выровняться с магнитным полем статора электродвигателя для поддержания минимального магнитного сопротивления. Сопротивления электродвигателя может быть достаточно, чтобы привести малонагруженную систему с низкой инерцией в синхронизм и развить крутящий момент около 30 процентов.
Синхронный крутящий момент
Синхронный крутящий момент электродвигателя — это крутящий момент, создаваемый после приложения возбуждения. Он представляет собой общий стационарный крутящий момент, доступный для управления нагрузкой. Крутящий момент достигает максимума при отставании ротора примерно на 70° от вращающегося магнитного поля статора. Однако максимальным значением является момент отрыва.
Момент отрыва
Момент отрыва — это максимальный устойчивый момент, который электродвигатель развивает на синхронной скорости в течение одной минуты при номинальной частоте и нормальном возбуждении. Нормальный момент отрыва обычно составляет 150 процентов от момента полной нагрузки для электродвигателей с единичным коэффициентом мощности. Это от 175 до 200 процентов для электродвигателей с ведущим коэффициентом мощности 0,8.
Втягивающий момент
Втягивающий момент синхронного двигателя — это крутящий момент, развиваемый при втягивании подключенной инерционной нагрузки в синхронизм при приложении возбуждения. Он развивается при переходе от скорости проскальзывания к синхронной скорости, когда электродвигатели переходят с асинхронного режима работы на синхронный. Это, как правило, самый критический период при запуске синхронного двигателя. При синхронной скорости момент, развиваемый амортизирующей и обмотками возбуждения, становится равным нулю. В результате в точке втягивания действуют только сопротивление и синхронизирующий момент, обеспечиваемые возбуждением обмотки возбуждения.
Дополнительные типы двигателей переменного тока по заказу
Многофазные двигатели переменного тока
Многофазные двигатели переменного тока с короткозамкнутым ротором, такие как трехфазные двигатели, представляют собой машины с постоянной скоростью. Они имеют некоторую степень гибкости в рабочих характеристиках при изменении конструкции паза ротора. Изменения в двигателях переменного тока вызывают изменения тока, крутящего момента и скорости полной нагрузки. Стандартизация и инновации позволили создать четыре основных типа двигателей переменного тока:
Исполнения A и B Характеристики
Конструкция C Характеристики
Конструкция D Характеристики
Исполнение F Характеристики
Асинхронные двигатели с фазным ротором
Асинхронные двигатели с короткозамкнутым ротором относительно негибкие в отношении характеристик скорости и крутящего момента. Однако специальный двигатель переменного тока с фазным ротором имеет регулируемую скорость и крутящий момент. Применение двигателей переменного тока с фазным ротором заметно отличается от двигателей переменного тока с короткозамкнутым ротором из-за доступности цепи ротора. Получение рабочих характеристик двигателя переменного тока заключается в введении различных значений сопротивления в цепь ротора.
Вторичное сопротивление в цепи ротора обычно запускает двигатели переменного тока с фазным ротором. Затем сопротивление двигателя переменного тока последовательно уменьшается, чтобы позволить двигателю набрать скорость. В результате двигатели переменного тока могут развивать значительный крутящий момент при ограничении тока заторможенного ротора. Производители двигателей переменного тока могут проектировать это вторичное сопротивление двигателя для непрерывной работы, чтобы рассеивать тепло, выделяемое при непрерывной работе на пониженных скоростях, частом ускорении или ускорении с большими инерционными нагрузками.
Внешнее сопротивление придает двигателям переменного тока характеристику, приводящую к большим падениям скорости вращения при небольшом изменении нагрузки. Обеспечивается пониженная скорость двигателя переменного тока примерно до 50 процентов от номинальной скорости, но эффективность остается низкой.
Многоскоростные двигатели переменного тока
Производители двигателей на заказ конструируют двигатели переменного тока с последовательной последовательностью полюсов для работы на одной скорости. Физически переподключив провода, можно добиться соотношения скоростей 2:1. Типичные скорости для двигателей переменного тока 60 Гц:
Двигатели переменного тока с двумя обмотками имеют две отдельные обмотки, которые производители могут наматывать для любого числа полюсов, чтобы облегчить получение других соотношений скоростей. Однако соотношение больше 1:4 нецелесообразно из-за размера и веса двигателя переменного тока. Однофазные двигатели переменного тока обычно имеют конструкцию с переменным крутящим моментом. Однако также доступны двигатели переменного тока с постоянным крутящим моментом и постоянной мощностью в лошадиных силах.
Выходная мощность двигателей переменного тока может быть пропорциональна каждой скорости. Такие нестандартные конструкции двигателей переменного тока имеют выходную мощность в лошадиных силах в соответствии с одной из следующих характеристик нагрузки:
Однофазные двигатели переменного тока
Однофазные асинхронные электродвигатели переменного тока обычно имеют дробную мощность. Однако однофазная интегральная мощность доступна в более низком диапазоне мощности. Наиболее распространенными однофазными двигателями переменного тока с дробной мощностью являются:
Этот нестандартный двигатель переменного тока доступен в многоскоростном исполнении, но существуют практические ограничения на количество получаемых скоростей. Доступны модели с двух-, трех- и четырехскоростными двигателями. Методы последовательного полюса или двухобмоточные методы могут сопровождать выбор скорости.
Универсальные двигатели
Универсальные двигатели
Универсальные двигатели работают практически с одинаковыми характеристиками при постоянном или переменном токе частотой до 60 Гц. Двигатели переменного тока отличаются от двигателей постоянного тока соотношением обмоток и более тонкими металлическими пластинами. Двигатели постоянного тока могут работать от переменного тока, но с низким КПД. Универсальные двигатели могут работать от постоянного тока с практически эквивалентными характеристиками двигателей переменного тока. Однако у них хуже коммутация и срок службы щеток по сравнению с эквивалентным двигателем постоянного тока. Важной характеристикой универсальных двигателей переменного тока является то, что они имеют самое высокое отношение мощности к фунту среди всех двигателей переменного тока, поскольку они работают на скоростях, во много раз превышающих скорость любого электродвигателя с частотой 60 Гц.
При работе без нагрузки универсальные двигатели склонны к разгону. Скорость ограничена только парусностью, трением и коммутацией. Поэтому большие универсальные двигатели почти всегда подключаются напрямую к нагрузке для ограничения скорости. На портативных инструментах, таких как электрические пилы, нагрузка, создаваемая шестернями, подшипниками и охлаждающим вентилятором, достаточна для удержания скорости холостого хода на безопасном уровне.
С универсальным двигателем управление скоростью осуществляется просто, поскольку скорость электродвигателя чувствительна к изменениям напряжения и потока. Реостат или регулируемый автотрансформатор позволяют легко изменять скорость двигателя переменного тока от максимальной скорости до нуля.
Электродвигатели с синхронизацией
Электродвигатели с синхронизацией имеют номинальную мощность менее 1/10 л.с. и используются в качестве первичных двигателей для устройств синхронизации. Поскольку двигатель используется в качестве таймера, он должен работать с постоянной скоростью.
Электродвигатели переменного и постоянного тока могут использоваться в качестве синхронизирующих двигателей. Электрические синхронизирующие двигатели постоянного тока используются в портативных устройствах или когда требуется высокое ускорение и низкие изменения скорости. Хотя требуется какая-то форма механического или электрического регулятора скорости, такие электродвигатели обладают рядом преимуществ, в том числе:
Серводвигатели переменного тока
Серводвигатели используются в сервомеханизмах переменного тока и компьютерах, требующих быстрого и точного отклика. Для получения этих характеристик серводвигатели имеют роторы малого диаметра с высоким сопротивлением. Меньший диаметр обеспечивает низкую инерцию для быстрых пусков, остановок и реверсов. Высокое сопротивление обеспечивает почти линейное соотношение скорости и крутящего момента для точного управления.
Серводвигатели ветра, изготовленные по индивидуальному заказу, с двумя фазами, физически расположенными под прямым углом или квадратурой в пространстве. Двигатели имеют фиксированную или эталонную обмотку, которая возбуждается от источника постоянного напряжения. Обмотка управления возбуждается регулируемым или переменным управляющим напряжением, обычно от сервоусилителя. Инженеры проектируют обмотки серводвигателя с одинаковым отношением напряжения к витку, чтобы входная мощность при максимальном возбуждении с фиксированной фазой и максимальном сигнале фазы управления были сбалансированы.
В идеальном серводвигателе крутящий момент на любой скорости прямо пропорционален напряжению обмотки управления двигателя. Однако эта взаимосвязь существует только при нулевой скорости из-за присущей асинхронному серводвигателю неспособности реагировать на изменения входного напряжения в условиях легкой нагрузки.
Свойственное серводвигателям демпфирование уменьшается по мере увеличения номинальных характеристик, и двигатели имеют разумную эффективность в ущерб линейности скорости-крутящего момента. Многие более крупные серводвигатели имеют встроенные вспомогательные вентиляторы для поддержания температуры в безопасных рабочих диапазонах. Доступны серводвигатели переменного тока мощностью от менее 1 до 750 Вт и размером от 0,5 до 0,7 дюйма. Большинство серводвигателей переменного тока имеют модульные или встроенные редукторы.
Заинтересованы в линейных двигателях переменного тока? Об их истории, характеристиках и применении читайте здесь.
Sinotech разрабатывает двигатели переменного тока на заказ в США и производит их в нескольких местах по всему Тихоокеанскому региону, чтобы снизить ваши расходы и риски. Свяжитесь с нами сегодня и дайте нам знать, как наши услуги по изготовлению двигателей переменного тока на заказ могут помочь вам запустить и запустить ваше приложение уже сегодня.
Синхронный асинхронный двигатель | Вопросы для собеседования по электротехнике
В приложениях, где требуется высокий пусковой момент и постоянная скорость, можно использовать синхронные асинхронные двигатели. Он имеет преимущества как синхронных, так и асинхронных двигателей. Синхронный двигатель обеспечивает постоянную скорость, тогда как асинхронные двигатели могут запускаться при полной нагрузке.
Рассмотрим обычный асинхронный двигатель с контактными кольцами, имеющий трехфазную обмотку на роторе, как показано на рис. 1.
Первоначально он работает как асинхронный двигатель с контактными кольцами с помощью пусковых сопротивлений. Когда сопротивление отключено, двигатель работает с проскальзыванием. Теперь соединения меняются, и возбудитель подключается последовательно с обмотками ротора, которые остаются в цепи постоянно. Двигатель подключается к возбудителю, который дает постоянный ток. подача к двигателю через токосъемные кольца. Одна фаза несет полный постоянный ток. ток, в то время как два других несут половину полного постоянного тока. тока, так как они включены параллельно. В связи с этим d.c. возбуждения, на роторе образуются постоянные полюса (N и S).
Поскольку двигатель работает как асинхронный двигатель, первоначально может быть создан высокий пусковой момент (до двойного значения полной нагрузки). Когда постоянный ток возбуждение при условии, что он приводится в синхронизм и начинает работать с постоянной скоростью. Синхронный асинхронный двигатель обеспечивает постоянную скорость, большой пусковой момент, низкий пусковой ток и коррекцию коэффициента мощности.
Возможно, что переменный ток обмотка надевается на ротор, а d.c. возбуждение осуществляется на статоре. Это упрощает управление механизмом. Это также дает лучшие возможности для изоляции, что позволяет использовать более высокие напряжения и более низкий постоянный ток. возбуждения.
Постоянный ток обмотка должна быть рассчитана таким образом, чтобы давать высокие м.д.с. с умеренным постоянным током мощность возбуждения. Потери возбуждения должны быть равномерно распределены по обмотке. Распределение mmf должно быть почти синусоидальным. Он также должен обеспечивать демпфирование вибраций и должен удовлетворительно запускаться как асинхронный двигатель.
Когда машина работает как асинхронный двигатель, в роторе индуцируются переменные токи, и скорость вращения ниже синхронной. Когда ротор несет постоянный ток. токи в роторе, и он работает ниже синхронной скорости. Когда ротор несет постоянный ток. токи поля ротора и, следовательно, ротор должен работать на синхронной скорости. Это означает, что скольжение должно быть сведено к нулю. Но если есть какое-либо отклонение от этой скорости при нормальной работе, то в роторе снова возникают наведенные токи. Ротор имеет низкое сопротивление, поэтому его обмотки действуют как демпфирующие обмотки. Следовательно, не требуются отдельные демпфирующие обмотки.
При возбуждении постоянным током быстро устанавливается синхронизирующий момент. Величина этого крутящего момента составляет T м sinθ, где θ — угол между полем статора и ротора. В дополнение к этому также присутствует крутящий момент асинхронного двигателя, который пропорционален скольжению (dθ/dt), если скольжение мало. Также может быть постоянный крутящий момент нагрузки, если он запускается под нагрузкой, и, наконец, для ускорения ротора требуется крутящий момент J(d 2 θ/d 2 t).
Можно видеть, что θ<π, пока синхронизирующий момент действует в направлении, противоположном направлению момента нагрузки, что имеет тенденцию уменьшать угловую скорость dθ/dt движения скольжения. когда π<θ<2π, тогда синхронизирующий крутящий момент действует в сочетании с крутящим моментом нагрузки, увеличивая скольжение, то есть ничего, кроме угловой скорости dθ/dt, и двигатель не синхронизируется.
Поскольку движение скольжения неравномерно, двигатель подвергается механическим нагрузкам. Также могут быть колебания тока и коэффициента мощности. Следовательно, желательно, чтобы двигатель синхронизировался как можно быстрее после переключения постоянного тока. возбуждение. Это требует, чтобы синхронизирующий момент был значительно больше, чем момент нагрузки, и он должен быть противоположен моменту нагрузки. Угол, полученный в момент переключения d.c. возбуждение также влияет на втягивание в шаг. На следующих рисунках представлены осциллограммы тока ротора при приложении возбуждения для различных значений θ. Когда возбуждение задерживается более чем на 60 o видно, что ротор не синхронизируется, так как крутящий момент асинхронного двигателя и синхронизирующий крутящий момент работают совместно, и крутящий момент будет иметь пульсирующее значение.
Таким образом, двигатель может быть переведен в синхронизм, если возбуждение применяется в положении, которое занимает ротор, когда поля статора и ротора синхронизированы.
| Рис. 2 |
1.1 Рабочие характеристики синхронных асинхронных двигателей
При изучении рабочих характеристик синхронного асинхронного двигателя необходимо учитывать три различных типа крутящих моментов. К ним относятся пусковой момент, который указывает способность двигателя запускаться против нагрузки, пусковой момент, который указывает на способность двигателя поддерживать работу во время переключения с асинхронного двигателя на синхронный двигатель, пусковой момент, который представляет синхронную работу двигателя при Пиковая нагрузка. Первые два крутящих момента тесно связаны друг с другом и являются характеристиками машины, работающей как асинхронный двигатель. Вытягивающий момент является характеристикой, когда он работает синхронно. Кривые характеристик синхронного асинхронного двигателя, работающего при полной нагрузке, единица p. f. и при 0,8 п.ф. ведущий показан на рис. 3.
Когда нагрузка превышает синхронный тяговый момент, машина теряет синхронность и работает как асинхронный двигатель с колебаниями крутящего момента и проскальзыванием из-за постоянного тока. возбуждение. При уменьшении момента нагрузки двигатель автоматически ресинхронизируется.
1.2 Преимущества синхронного асинхронного двигателя
Ниже приведены преимущества синхронного асинхронного двигателя по сравнению с явнополюсным синхронным двигателем.
i) Синхронный асинхронный двигатель может запускаться и синхронизироваться при крутящем моменте, превышающем полную нагрузку, что невозможно для явнополюсного синхронного двигателя, который должен запускаться при небольшой нагрузке.
ii) Возбудитель, необходимый для синхронного асинхронного двигателя, имеет меньшую мощность, поскольку зазор невелик по сравнению с обычным явнополюсным двигателем.
iii) Обмотка ротора синхронного асинхронного двигателя может обеспечивать возбуждение и необходимое демпфирование. Таким образом, не требуется отдельной демпферной обмотки.
iv) Отдельного пускового и управляющего оборудования не требуется.
1.3 Недостатки синхронного асинхронного двигателя
i) Поскольку зазор мал по сравнению с обычным явнополюсным синхронным двигателем, он не обеспечивает большой перегрузочной способности.
ii) Изменение коэффициента мощности велико по сравнению с обычным синхронным двигателем.
iii) Изменение скорости невозможно для синхронного асинхронного двигателя, так как он работает при постоянном двигателе.
1.4 Применение синхронного асинхронного двигателя
В приложениях, в которых необходимо приводить в действие механическую нагрузку вместе с опережающими фазами синхронных двигателей, следует использовать синхронные асинхронные двигатели. Кроме того, этот двигатель можно использовать в тех случаях, когда крутящий момент под нагрузкой остается почти постоянным.0003
Синхронные двигатели переменного тока и шаговые двигатели постоянного тока
Синхронные двигатели переменного тока
и шаговые двигатели постоянного тока
для любых нужд!
Узнать о предложении
Узнать о предложении
Синхронные
Асинхронные двигатели
просмотреть полное предложение
Шаговый двигатель
Двигатели постоянного тока
посмотреть полное предложение
Коробки передач
посмотреть полное предложение
ПРОЧНЫЕ, НАДЕЖНЫЕ И ПРОЧНЫЕ МИКРОМОТОРЫ
Crouzet предлагает солидную базу стандартных синхронных и шаговых двигателей, включая большое количество комбинаций с редукторами.
Мы специализируемся на разработке индивидуальных решений по перемещению для самых специфических задач. Наше 100-летнее инженерное ноу-хау позволяет нам предоставлять индивидуальные механические характеристики, индивидуальные параметры обмотки и широкий спектр международных стандартов и сертификатов.
Почему стоит выбрать Crouzet для своих проектов?
Более 100 миллионов двигателей, поставленных с 1955 года
Крупносерийное производство: 2 млн двигателей в год
90% двигателей разработаны совместно с заказчиками
65 лет на рынке
Присутствие по всему миру
Ознакомьтесь с полным предложением
Синхронный переменный ток
Синхронные двигатели переменного тока являются лучшим решением для приложений, требующих постоянного движения и низкого крутящего момента, например, в медицинском оборудовании, клапанах, насосах и водоподготовке. Скорость их вращения прямо пропорциональна частоте сети, то есть всегда постоянна и не зависит от нагрузки.
Crouzet предлагает широкий ассортимент стандартных микромоторов мощностью от 0,2 Вт до 3 Вт и неограниченные возможности индивидуальной настройки для самых требовательных требований.
Расскажите нам о потребностях вашего проекта
Однонаправленный Эти двигатели могут вращаться только в одном направлении, по часовой или против часовой стрелки. | Реверсивный Эти двигатели могут вращаться как по часовой, так и против часовой стрелки. | |
|---|---|---|
| Диапазон номинальной мощности | 0,2 Вт / 0,4 Вт | 0,3 Вт → 3 Вт |
| Диапазон номинального напряжения | 24 В → 240 В | 50 Гц → 60 Гц | 24 В → 240 В | 50 Гц → 60 Гц |
| Диапазон номинальной скорости | 600 об/мин → 720 об/мин | 250 об/мин → 600 об/мин |
| Диапазон номинальных крутящих моментов | 2,5 мНм / 8 мНм | 10 мН·м → 110 мН·м |
| Диаметр | 47 мм | 35/51/57/65 мм |
| Уровень шума | 45 ДБА | 30 ДБА |
| Срок службы | 10 млн циклов включения/выключения | 20 000 часов |
| Стандартные сертификаты | UL/CE/ROHS | УЛ/СЕ/РОХС |
| Подробнее | Подробнее |
Шаговые двигатели постоянного тока
9Шаговые двигатели постоянного тока 0005 — отличный выбор для простых приложений, требующих длительного срока службы и легкой интеграции, таких как небольшие системы отопления, вентиляции и кондиционирования воздуха, копировальные машины, плоттеры, медицинские насосы и капельные дозаторы, а также торговые и игровые автоматы.
Расскажите нам о потребностях вашего проекта
Шаговый двигатель постоянного тока Эти двигатели работают в разомкнутом контуре, что означает: n импульсов = n шагов. | |
|---|---|
| Диапазон номинальной мощности | 0,5 Вт → 5 Вт |
| Диапазон номинального напряжения | 3 В → 64 В |
| Номинальный диапазон скоростей | 0 об/мин→ 1500 об/мин |
| Диапазон номинального крутящего момента | 15 мН·м → 300 мН·м |
| Диаметр | 35/51/57/65 мм |
| Уровень шума | 35 дБА |
| Срок службы | 20 000 часов |
| Стандартные сертификаты | УЛ/СЕ/РОХС |
| Подробнее |
Редукторы
Чтобы соответствовать идеальным уровням скорости и крутящего момента для подавляющего большинства применений, мы предлагаем полный ассортимент редукторов с широким диапазоном передаточных чисел для регулировки наших двигателей.
Каждый редуктор был разработан для определенной рабочей нагрузки и оптимизирован для длительного механического срока службы, с большой способностью воспринимать максимальный крутящий момент при непрерывном движении.
Расскажите нам о потребностях вашего проекта
Овойде
| Двойной яйцевидный
| ПАРАЛЛЕЛЬНЫЙ ВАЛ (RC65) | |
|---|---|---|---|
| AC СИНХРОННЫЙ — ОДИН НАПРАВЛ. | |||
| AC СИНХРОННЫЙ — РЕВЕРСИВНЫЙ | |||
| ДАТЧИК ПОСТОЯННОГО ТОКА |
Полное руководство по выбору продукта
Если вы хотите выбрать продукт, соответствующий вашим конкретным потребностям, ознакомьтесь с нашими решениями
Загрузите здесь
Тестирование синхронного двигателя
с использованием технологии MCA, часть 1
ИЗОБРАЖЕНИЕ 1 (вверху слева): синхронный двигатель с постоянными магнитами (изображения предоставлены All-Test Pro). ИЗОБРАЖЕНИЕ 2 (вверху справа): Синхронный двигатель с независимым возбуждением
В июньском номере журнала Pumps & Systems за 2022 г. была опубликована статья под названием «Преимущества синхронных двигателей», в которой обсуждается ожидаемый рост использования синхронных двигателей на рынке насосов. Эта статья является первой в серии из двух частей и содержит краткий обзор конструкции и работы синхронных двигателей, распространенных неисправностей и способов использования синхронных двигателей для регулирования коэффициента мощности электрических систем предприятия.
Во второй части будет обсуждаться, как можно использовать анализ цепи двигателя для оценки текущего состояния этих двигателей, а также легко и быстро выявлять любые возникающие проблемы, прежде чем они станут проблематичными.
Преимущества синхронных двигателей в насосных установках
Синхронные двигатели обычно используются, когда требуется работа с постоянной скоростью; однако для насосных применений они в основном используются по финансовым соображениям, например:
1 — Операции с более высокой эффективностью, чем обычно выполняются асинхронными двигателями, что приводит к снижению затрат на электроэнергию.
2 — Способность улучшать коэффициенты мощности системы, чтобы помочь уменьшить любые надбавки за коэффициент мощности (PF), налагаемые поставщиком энергии. Это позволяет одному двигателю обеспечить требуемый расход от насоса, а также улучшить коэффициент мощности установки.
Коррекция коэффициента мощности
Коэффициент мощности определяется как отношение фактической мощности (Вт) к полной мощности (вольт-ампер). Основная проблема заключается в том, что станции, которые обычно платят за реальную мощность, используют киловатт-часы (кВт-ч). Разница между реальной мощностью и полной мощностью составляет реактивную мощность. Чтобы быстро просмотреть:
Истинная мощность (Ватт) — это мощность, производящая полезную работу, передаваемая в нагрузку и измеряемая в ваттах.
Реактивная мощность (ВАр) — это мощность, необходимая для создания магнитных полей в двигателях, трансформаторах или любой катушке в электрической системе. Эта мощность хранится в виде энергии магнитного поля и заставляет ток отставать от напряжения. Любая емкость в цепи также будет накапливать энергию и заставлять напряжение отставать от тока. Если в системе больше индуктивной нагрузки, то коэффициент мощности отстает. Если в системе больше емкостная нагрузка, то PF будет ведущим. Единицами измерения реактивной нагрузки являются реактивные вольт-амперы.
Полная мощность (ВА) — это общая мощность, подаваемая в систему от источника. Это подаваемое напряжение, умноженное на весь ток в системе.
Коэффициент мощности (PF) представляет собой отношение фактической мощности, используемой в системе, к полной мощности, подаваемой источником, и измеряется в процентах. PF = (истинная мощность/полная мощность) 100
Коммунальное предприятие должно снабжать электростанцию полной мощностью, но взимать плату только за фактическую используемую мощность. В идеале коммунальное предприятие хотело бы взимать с пользователя плату за всю поставляемую мощность, но станции с низкими коэффициентами требуют от поставщика поддерживать достаточную мощность для обеспечения требуемой полной мощности, но могут взимать плату только за фактическую мощность. Таким образом, когда установка работает с коэффициентом мощности, близким к единице (истинная мощность = кажущаяся мощность), поставщик взимает плату за общую поставляемую мощность. На станциях, работающих с низким коэффициентом мощности, поставщик не взимает плату за необходимую дополнительную мощность, поэтому он добавляет надбавку за коэффициент мощности.
Большинство промышленных предприятий имеют большое количество индуктивных нагрузок, что означает, что они будут иметь запаздывающий коэффициент мощности. Синхронные двигатели могут использоваться для перемещения PF от отстающего PF путем перевозбуждения катушек возбуждения ротора.
Основные типы и конструкция синхронных двигателей
Поскольку синхронные двигатели вращаются с той же скоростью, что и вращающееся магнитное поле, необходимо наличие магнитного поля на роторе. Типы синхронных двигателей:
1 — Синхронный двигатель без возбуждения : наиболее распространенными из них являются синхронные двигатели с постоянными магнитами, в которых на роторе установлены постоянные магниты для создания вращающегося магнитного поля.
2 — Синхронный двигатель с независимым возбуждением : они имеют ряд катушек возбуждения, намотанных вокруг полюсов возбуждения ротора, и требуют напряжения постоянного тока (DC) для создания магнитного поля на роторе. Эти двигатели можно дополнительно разделить на щеточные и бесщеточные возбудители.
Базовая конструкция синхронных двигателей
Базовая конструкция статора такая же, как у любого трехфазного двигателя переменного тока. Есть три набора фазных обмоток, как у стандартного трехфазного асинхронного двигателя. Эти катушки точно размещаются в пазах статора для создания трехфазных обмоток, каждая фаза имеет четное число полюсов (P).
Подача трехфазного переменного тока непосредственно на фазные обмотки создает магнитное поле, которое вращается с постоянной скоростью вокруг сердечника статора. Это называется синхронной скоростью (СС). SS зависит от количества полюсов и применяемой частоты.
Основным отличием асинхронного двигателя от синхронного является ротор. Ротор размещен внутри сердечника статора и установлен на подшипниках для позиционирования ротора в геометрическом центре сердечника статора, что позволяет ротору свободно вращаться.
Постоянные магниты или полюса поля создают вращающееся магнитное поле, которое взаимодействует с магнитным полем, вращающимся вокруг статора. Взаимодействие между двумя магнитными полями преобразует электрическую энергию в механический крутящий момент.
Роторы с независимым возбуждением можно разделить на бесщеточные или щеточные синхронные двигатели. Бесщеточные типы обычно имеют вращающийся генератор переменного тока, установленный на валу двигателя. Эти генераторы переменного тока имеют катушки якоря, установленные на валу, поле которого питается от катушек на статоре. Генерируемая выходная мощность переменного тока затем выпрямляется для обеспечения необходимого возбуждения поля постоянным током (DC) для катушек возбуждения двигателей.
Синхронный двигатель щеточного типа подает напряжение постоянного тока через щетки, установленные на токосъемных кольцах, на катушки возбуждения, установленные на полюсах возбуждения, для создания магнитных полей ротора. Катушки возбуждения, которые создают магнитные поля на полюсах ротора, соединены последовательно, причем соседние полюса имеют противоположную полярность, как показано на Рисунке 2.
Недостатком синхронных двигателей является недостаточный крутящий момент во время пуска для вращения ротора с приложенной нагрузкой. Во время запуска переменного тока синхронный двигатель реагирует так же, как асинхронный двигатель переменного тока. Он основан на специальной схеме, созданной амортизирующими обмотками для создания магнитного поля на роторе.
ИЗОБРАЖЕНИЕ 3: Обмотки трехфазного статора
Амортизирующие обмотки представляют собой проводники, встроенные в полюса возбуждения, которые действуют как проводники во время пускового цикла. Амортизирующие обмотки соединены на каждом конце, чтобы создать электрическую цепь, подобную той, которая используется в асинхронных двигателях с короткозамкнутым ротором.
Пусковой ток основан на законе взаимной индуктивности Фарадея для создания такого же высокого пускового тока, как и в асинхронных двигателях. Это позволяет скорости вращения вала догнать вращающееся магнитное поле. Когда ротор приближается к синхронной скорости, поле постоянного тока подается на катушки возбуждения ротора, позволяя полюсам ротора замыкаться на вращающемся магнитном поле.
Неисправности синхронных двигателей
Как и в большинстве двигателей, подшипники обычно являются основной причиной отказа синхронного двигателя, за которым следуют короткие замыкания обмотки ротора и статора. Кроме того, амортизирующие обмотки могут треснуть так же, как при выходе из строя стержней ротора в асинхронных двигателях.
Идентификация этих неисправностей с помощью традиционных электрических испытательных устройств и инструментов, обычно используемых в промышленности, имеет ограничения и недостатки, присущие асинхронным двигателям с короткозамкнутым ротором. Однако в связи с их конструкцией и работой требуются дополнительные приемы и методы испытаний.
Методы анализа вибрации машин улучшили обнаружение и выявление неисправностей подшипников качения, и тот же анализ цепей двигателя (MCA), который аналогичным образом усовершенствовал обнаружение и анализ асинхронных двигателей, может быть применен к синхронным двигателям
MCA эффективен при поиске и идентификации неисправностей асинхронных двигателей.