Содержание
Драйвер шагового двигателя. Тестируем микросхему L9110 / Хабр
Откуда «ножки» растут
В настоящее время стали доступны и приобрели популярность различные станки с программным управлением. Это лазерные и фрезерные резчики и гравёры. А так же 3D принтеры. Все эти станки имеют один общий узел — шаговый двигатель.
И этому двигателю нужен драйвер.
Принцип работы двигателя не является предметом этой статьи. Мы рассмотрим только драйвер. Всё, что нам нужно знать в данном контексте — это какие управляющие сигналы нам нужно формировать для управления шаговым двигателем. Оказывается, это самые обычные прямоугольные импульсы.
Существует некоторое количество решений драйверов от различных компаний. В нашей статье мы рассмотрим самое доступное решение драйвера L9110 и его аналог HG7881 Это решение часто используется в Arduino
Теория и практика
Я решил применить микросхему L9110 в своём проекте.
Довольно легко нагуглил datasheet. Прочитал. Всё предельно понятно. Характеристики, распиновка, таблица истинности… По всем параметрам драйвер, вроде бы подходит. Напряжение коммутации — 12 вольт, выходной ток 800 ма. — всего хватает.
А что на деле?
Не откладывая в «долгий ящик» я сделал плату, написал и запустил тестовую программу…
Первое, на что я обратил внимание в своём устройстве — то, что микросхема драйвера сильно греется. Внимание! НА ХОЛОСТОМ ХОДУ. Без нагрузки. Это что за чудеса схемотехники?
Может у меня микросхема бракованная?
Пришла в голову идея рассмотреть сей девайс поподробнее. И не один, а кучу.
Сказано — сделано.
Хорошо, что у меня была припасена панелька SO-8 и плата для моделирования.
Ну, и контроллер на базе STM32.
Собран стенд и произведены измерения.
Да, кстати, кроме непосредственно, силового узла в микросхеме заложена логика исключающее ИЛИ. В даташите это описано.
В даташите это описано.
Поскольку я изучаю эффект нагрева микросхемы, лучше не ограничиваться логическими единицами и нулями, а снять реальные напряжения.
В результате измерений получилась табличка:
Рассмотрим строчки 2 и 3. Что мы здесь видим?
- Падение напряжения на выходных транзисторах, при наличии нагрузки, около полутора вольт, что при токе 0,33 ампера даёт 0,5 ватт на канал.
- На холостом ходу микросхема потребляет 0,05 А, что при напряжении 12 В даёт 0,6 ватт на канал.
Другими словами, независимо от нагрузки она потребляет около 0,5 Вт на канал. Теперь понятно, почему я об неё обжигал пальцы.
Сильный нагрев — это, конечно недостаток. Но может свою функцию микросхема выполняет хорошо? Тут пригодился недавно подаренный себе 4-х лучевой осциллограф приставка. Не ожидал, что мне так скоро потребуются все 4 луча. Для тестирования написал простенькую программку на stm32, который давно использую в различных проектах. Программа, просто, генерирует 2 прямоугольных сигналы с трёхкратной разницей частот.
Программа, просто, генерирует 2 прямоугольных сигналы с трёхкратной разницей частот.
Поскольку один раз увидеть лучше чем много раз прочитать — прикладываю развёртку сигналов управления.
Ничего особо сложного. Просто прямоугольные импульсы сдвинутые с разницей частоты в 3 раза.
Верхняя часть экрана — входные сигналы — нижняя — выходные.
Сразу бросается в глаза, что при различающихся значениях сигналов на входах, значения на выходах вполне чёткие Устанавливаются без задержек и с резкими фронтами.
Если же сигналы на входах совпадают — то фронт пологий. похож на разряд конденсатора.
Просмотрев документацию я не увидел ничего такого, что предвещало бы такое поведение.
Может я задал слишком высокую частоту входных сигналов? В даташите лимит не указан.
Уже зная, что у этого драйвера есть почти стопроцентный аналог HG7881 я обратился к его документации.
Она пролила больше света на эту загадочную ситуацию. Оказывается, логика работы драйвера немного шире. Две единицы на входе — это торможение ( то есть на выходе оба сигнала должно быть низкого уровня.) А два нуля на входе — это «висящие» контакты. Разрыв.
Две единицы на входе — это торможение ( то есть на выходе оба сигнала должно быть низкого уровня.) А два нуля на входе — это «висящие» контакты. Разрыв.
Значит два нуля на входе должны «подвешивать» выходы. Тогда, поведение разряжающегося конденсатора вполне предсказуемо. Однако две единицы на входах — должны быть надёжным нулём на выходе. А фактически это не так.
Я мог бы списать этот дефект на «китайского производителя». Однако, я тестировал микросхему по честному выпаянную из ардуиновской платы. При чём — не одну микросхему. Из нескольких плат. То есть, вероятность брака сильно снижена.
Вывод
Область применения микросхем L9110 уже, чем задекларирована, да и КПД низковат.
Рассеяние 0,5-0,6 ватта на одном ключе — это многовато. Не случайно это решение самое дешёвое.(10 центов за микросхему. на алиэкспрессе).
В следующих статьях будут рассмотрены альтернативные драйвера шаговых двигателей.
Как настроить драйверы шаговых двигателей: рассчитываем Vref
При замене драйверов необходимо выставлять правильное опорное напряжение, оно же Vref.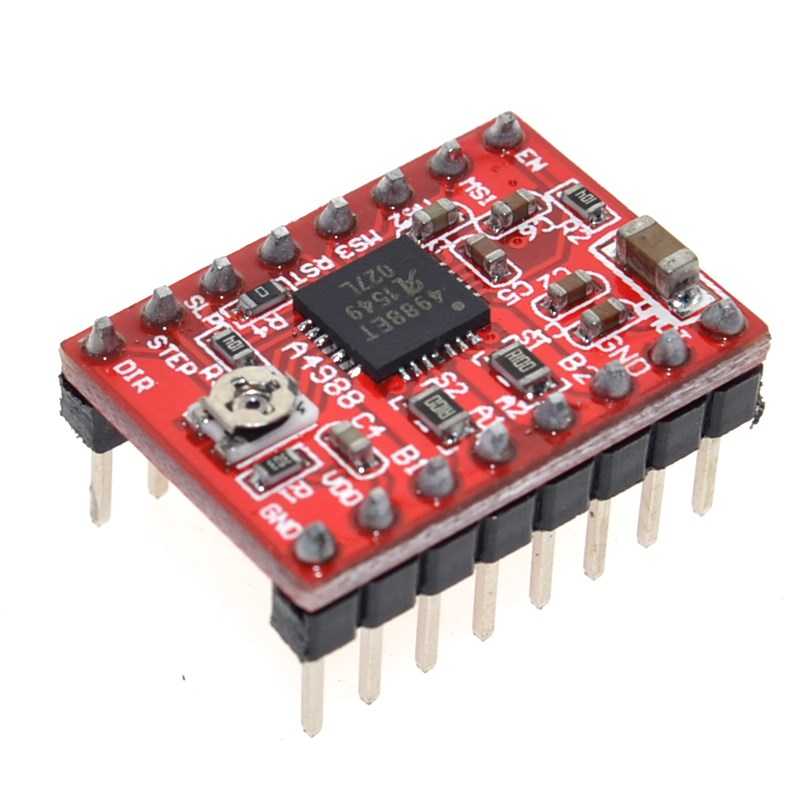 Драйверы шаговых двигателей — это небольшие чипы, отвечающие за управление приводами на 3D-принтерах, лазерных граверах и других станках с ЧПУ. По сути, они контролируют подачу тока на двигатели.
Драйверы шаговых двигателей — это небольшие чипы, отвечающие за управление приводами на 3D-принтерах, лазерных граверах и других станках с ЧПУ. По сути, они контролируют подачу тока на двигатели.
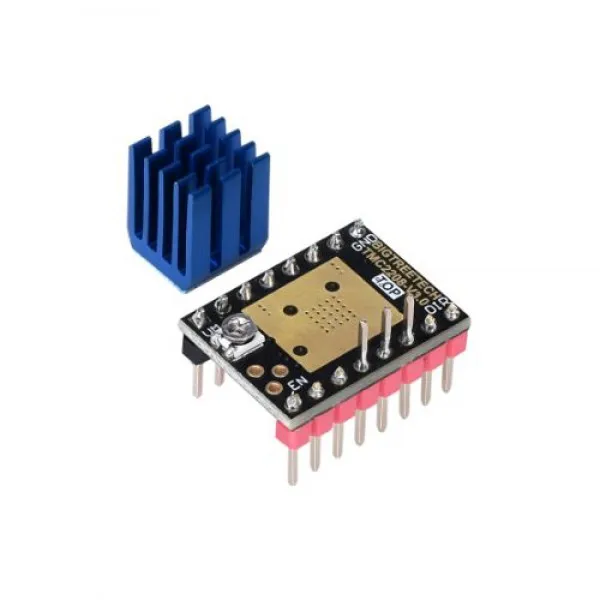
A4988, TMC2208 и TMC2209 — распространенные драйверы, устанавливаемые на сменные модули или распаянные непосредственно на платах управления. Сменные модули разнятся от производителя к производителю, но, как правило, имеют схожую форму и совместимую распиновку. Отдельно отметим, что ряд управляющих плат поддерживает программное управление током, для них эта статья неприменима.
В этой статье мы разберемся шаг за шагом с расчетом важной настройки в шаговых двигателях — опорного напряжения или Vref. Инструкции затронут широко распространенные драйверы A4988, а также более продвинутые TMC2208 и TMC2209.
Что такое Vref
Vref означает «опорное напряжение» и измеряется в вольтах. На практике Vref определяет максимальный ток двигателя, точная настройка этого параметра важна для обеспечения правильного функционирования и длительной эксплуатации как драйверов, так и моторов.
У каждого шагового двигателя есть оптимальный диапазон тока. Слишком низкое значение может привести к пропуску шагов и возникновению дефектов в виде сдвига слоёв или пропусков подачи (для экструдера). С другой стороны, слишком высокое может привести к перегреву драйверов, это тоже приводит к пропуску шагов; также превышение допустимого тока может вывести из строя двигатель.
Что понадобится
Чтобы рассчитать правильное значение Vref для конкретного драйвера, первым делом необходимо выяснить значение номинального тока двигателей. Эта информация обычно предоставляется производителем, хотя для некоторых двигателей ее может быть сложно найти.
Сообщество RepRap поддерживает детализированную базу данных по наиболее распространенным двигателям NEMA 17. Здесь можно найти необходимую информацию по маркировке на корпусе мотора. В качестве примера мы будем использовать NEMA 17 42SHDC3025-24B, согласно базе данных рассчитанный на ток силой 0,9 A.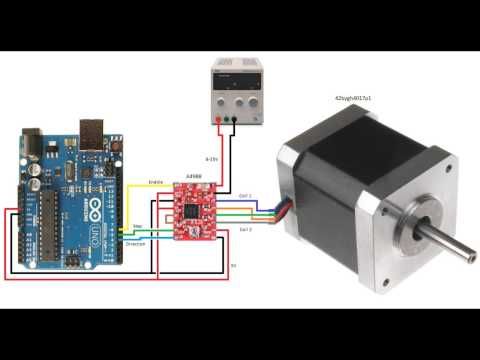
Для настройки значения Vref непосредственно на плате потребуются насколько инструментов:
• цифровой мультиметр;
• материнская плата 3D-принтера или ЧПУ-станка с источником питания;
• пластиковая или керамическая отвертка, обычно на 1,5 мм.
Драйверы A4988
A4988 — один из наиболее распространенных типов драйверов в настольном оборудовании, включая 3D-принтеры. Эти чипы разработаны компанией Allegro MicroSystems и пользуются популярностью ввиду дешевизны.
Как рассчитать Vref
Опорное напряжение рассчитывается по простой формуле:
Vref = I x 8 x Rsense
I — это номинальный ток мотора, а Rsense означает сопротивление токоизмерительного резистора. Rsense — постоянное значение, которое можно определить по маркировке на плате.
Сопротивление токоизмерительных резисторов варьируется от производителя к производителю, обычно в пределах 0,05-0.2 Ом. Найдите два резистора, как показано на иллюстрации выше. В нашем случае это резисторы R100 с сопротивлением 0,1 Ом.
В нашем случае это резисторы R100 с сопротивлением 0,1 Ом.
Хотя мы будем использовать шаговый двигатель с номинальным током 0,9 A, выставлять максимальное значение не следует. Желательно понизить силу тока хотя бы на 10%, что в нашем случае означает примерно 0,8 А.
Считаем:
Vref = 0,81 х 8 х 0,1 = 0,64 В
Как настроить Vref с помощью потенциометра
Значение Vref мы рассчитали, осталось выставить его на драйвере. Платы драйверов A4988 оснащаются потенциометрами специально для этой цели.
Как это делается:
1. Установите драйвер на плату контроллера, не подключая питание. Если вы имеете дело с Ramps 1.4, не забудьте заодно подсоединить Arduino Mega.
2. Подайте питание на плату через VDD и GND, но не USB.
3. Выставите на мультиметре напряжение постоянного тока и правильную шкалу — в районе 2 В.
4. Коснитесь черным щупом GND, как показано на иллюстрации выше.
5. Красным щупом осторожно коснитесь потенциометра драйвера, чтобы измерить Vref.
Будьте аккуратны при работе с красным щупом: касание не в том месте потенциально может закоротить драйвер или контроллер.
Настройка тока драйверов осуществляется при отключенных моторах.
Теперь мы знаем текущее значение Vref и можем подогнать его под рассчитанное ранее с помощью отвертки. Это операцию может потребоваться провести несколько раз, внося изменения и проверяя результаты, пока не будет получено необходимое значение.
Если вы используете отвертку с пластиковым или керамическим кончиком, можно подкручивать потенциометр при подключенном питании без риска повреждения платы. Если же кончик металлический, лучше не рисковать и отключать питание во время настройки, а затем снова подключать питание для замера нового значения.
Направление вращения потенциометра зависит от производителя, поэтому в первой попытке ограничьтесь лишь небольшой корректировкой в ту или иную сторону и проверьте результат, чтобы понять в какую сторону крутить до необходимого значения.
Повторите операцию, пока не получите значение, максимально близкое к расчетному. Имейте в виду, что выставить абсолютно точное значение может быть трудной задачей, но чем ближе, тем лучше.
Дальше остается только проделать то же самое с остальными драйверами.
Драйверы TMC2208 и 2209
Драйверы с обозначениями TMC разработаны компанией Trinamic Motion Control. TMC2208 и TMC2209 — очень тихие варианты, поддерживающие дробление шагов до 1:256. Будучи современными драйверами они могут функционировать как самостоятельно, так и в режиме UART.
В режиме UART ток двигателя можно настроить через прошивку, а в самостоятельном режиме изменения необходимо вносить вручную. Процесс довольно схож с настройкой драйверов A4988.
Как рассчитать Vref
Процедура расчета Vref одинакова для TMC2208 и TMC2209. Формула выглядит вот так:
Irms — среднее квадратичное значение тока, а Rsense — сопротивление токоизмерительного резистора.
Значение Rsense можно выяснить по маркировке, точно так же как с A4988, только на этот раз ищите резисторы на нижней стороне платы. Чтобы рассчитать Irms просто поделите ток шагового двигателя на 1.4 (квадратный корень из двух).
Для иллюстрации процесса давайте рассчитаем Vref драйвера TMC2209 от BigTreeTech в связке с шаговым двигателем на 0,9 А. Имейте в виду, что максимальное значение тока для TMC2208 не должно превышать 1,2 A.
Rsense для этого драйвера — 0,11 Ом, так как используются резисторы R110. В нашей формуле используются миллиомы, так что берем 110 мОм. Ради безопасности силу тока вновь снижаем примерно на 10% от максимальной и получаем 0,8 А.
Дальше считаем по формуле и получаем значение Vref равное 0,8 В.
Как настроить Vref с помощью потенциометра
Ручная настройка Vref для TMC2208 и TMC2209 выполняется таким же образом, как для A4988, с той лишь разницей, что красным щупом необходимо замерять в другом месте. Где щупать — показано на иллюстрации выше, на всякий случай все же сначала проверьте документацию от производителя.
Где щупать — показано на иллюстрации выше, на всякий случай все же сначала проверьте документацию от производителя.
Все остальные шаги и рекомендации по настройке Vref на TMC2208 и TMC2209 точно такие же, как для A4988.
Перевод статьи Vref Calculator: How to Tune Your Stepper Driver. Оригинал размещен на сайте All3DP по этой ссылке.
Определение частотных границ шагового двигателя с драйвером А4988
Авторы:
Аверченко Артем Павлович,
Молдагулова Анель Артуровна,
Нурмаганов Роман Сагадатович
Рубрика: Технические науки
Опубликовано
в
Молодой учёный
№47 (285) ноябрь 2019 г.
Дата публикации: 24.11.2019
2019-11-24
Статья просмотрена:
560 раз
Скачать электронную версию
Скачать Часть 2 (pdf)
Библиографическое описание:
Аверченко, А. П. Определение частотных границ шагового двигателя с драйвером А4988 / А. П. Аверченко, А. А. Молдагулова, Р. С. Нурмаганов. — Текст : непосредственный // Молодой ученый. — 2019. — № 47 (285). — С. 108-110. — URL: https://moluch.ru/archive/285/64326/ (дата обращения: 16.10.2022).
В современном мире все большую популярность приобретают устройства, в составе которых используется шаговый двигатель (ШД), это обусловлено достаточно простым управлением скоростью вращения, а также возможностью точного углового позиционирования положения вала. ШД используется в принтерах, сканерах, факсах, световом оборудовании, а также в разнообразном промышленном и специальном оборудовании, например в станках ЧПУ. Очень широкое применение ШД нашли в робототехнике, автомобилестроении.
ШД используется в принтерах, сканерах, факсах, световом оборудовании, а также в разнообразном промышленном и специальном оборудовании, например в станках ЧПУ. Очень широкое применение ШД нашли в робототехнике, автомобилестроении.
Задача состоит в экспериментальном определении оптимальных частот переключения микрошаговых режимов двигателей. Необходимо, определить граничные частоты, при которых происходит плавный, стабильный запуск и вращение ШД, а также частоты срыва, на которой двигатель перестает, вращается стабильно. Определение частот необходимо произвести при постоянном напряжении питания драйвера 4,5В, на сам ШД подаем 16,4В. При этом граничные частоты являются рекомендованными для создания устройств на базе данных ШД и драйвера.
В исследовательской работе использовали гибридный ШД, который сочетает в себе больший удерживающий и динамический крутящий момент, чем ШД с переменным или постоянным магнитом. Ротор имеет зубцы, расположенные в осевом направлении и он разделен на две части, внутри ротора расположен цилиндрический постоянный магнит. Зубцы верхней половины являются северным магнитным полюсом, а другая половина южным. Особенность ШД в том, что он может контролировать угловое положение ротора без замкнутого контура обратной связи. [1]
Зубцы верхней половины являются северным магнитным полюсом, а другая половина южным. Особенность ШД в том, что он может контролировать угловое положение ротора без замкнутого контура обратной связи. [1]
Чтобы упростить процесс управления ШД существуют соответствующие драйверы. Драйвер — представляет собой электрическую цепь или другой электронный компонент, предназначенный для преобразования электрических сигналов. Драйвер используется для управления биполярным шаговым двигателем с полным шагом, половинным и микрошагом, а также для регулирования тока, протекающего через цепь и направлением вращения двигателя. В данной работе использовался драйвер, созданный на базе микросхемы А4988.
Рабочее место: генератор сигналов произвольной формы HMF 2550, источник питания ATH-1333–2 шт, шаговый двигатель MT-1703HD200AW, драйвер А4988.
ШД имеет размер шага 1,8° (что соответствует 200 шагам на оборот). Драйвер А4988 позволяет работать с микрошагом. Выбор микрошага устанавливается при помощи входов драйвера MS1, MS2, MS3, при подаче соответствующих логических уровней можно организовать пять различных шаговых режимов представленных в таблице 1.
Таблица 1
Микрошаговые режимы А4988
Разрешение микрошагов | MS1 | MS2 | MS3 | Угол поворота на шаге |
Полный шаг | «0» | «0» | «0» | 1.8° |
Половина шага | «1» | «0» | «0» | 0.9° |
Четверть шага | «0» | «1» | «0» | 0.45° |
Одна восьмая шага | «1» | «1» | «0» | 0. |
Одна шестнадцатая шага | «1» | «1» | «1» | 0.1125° |
 225°
225°Рис. 1. Схема установки
Управление шаговым двигателем осуществляется через входы «ENABLE», «STEP» и «DIR». Каждый импульс, поступающий на вход «STEP» соответствует одному микрошагу ШД в направлении, выбранном с помощью «DIR».
Для разрешения работы драйвера, нужно установить уровень логического «0» на вход «ENABLE». Провода первой обмотки шагового двигателя подключаются к выводам драйвера 1А, 1В, второй обмотки к выводам 2А, 2В.
В таблице — 2, при напряжении питания драйвера 4,5В, разгоняем ШД плавно от стабильного запуска и до частоты срыва, для различных микрошагов. Определили предельное значение частоты, при которой ШД стабильно запускается.
Таблица 2
Частоты запуска исрыва ШД
Назначение микрошага | Оптимальная частота плавного перехода при 4. | Предельное значение запуска ШД | |
запуск | предел | ||
Полный шаг | 850 Гц / 255 об/мин | 9000 Гц / 2700 об/мин | 1000 Гц |
Половина шага | 1500 Гц / 450 об/мин | 2560 Гц / 768 об/мин | 2500 Гц |
Четверть шага | 3050 Гц / 915 об/мин | 31500 Гц / 9450 об/мин | 4500 Гц |
Одна восьмая шага | 6200 Гц / 1 860 об/мин | 91100 Гц / 27330 об/мин | 7900 Гц |
Одна шестнадцатая шага | 12500 Гц / 3750 об/мин | 192300 Гц / 57690 об/мин | 15300 Гц |
 5 В
5 В Чтобы момент на валу был больше, нужно использовать как можно меньший шаг, то есть микрошаги не оказывают никакого негативного влияния на крутящий момент.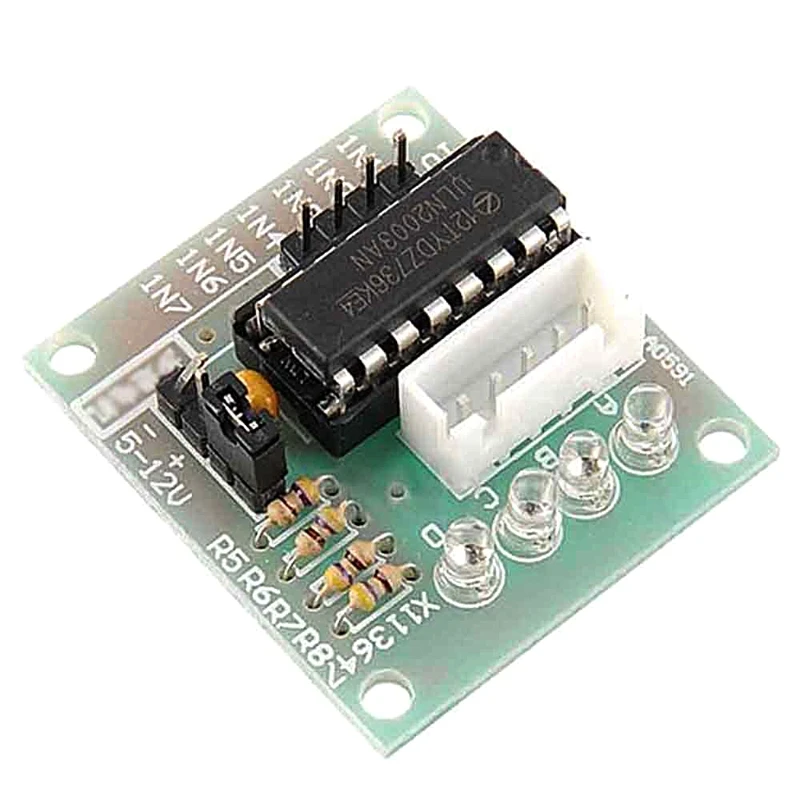
Для управления ШД была написана программа на языке программирования С++. С помощью драйвера А4988 формировали импульсы. Для установки шага использовали три сигнала MS1, MS2, MS3. [2]
Подберем шаги и значения для ШИМ для разных частот вращения. ШИМ по отношению к процессору внешняя система, которая формирует сигнал. Зная, на каких оборотах, работает ШД, можно рассчитать число для ШИМ модулятора.
Найдем по формуле число для ШИМ модулятора N
Где fтакт — частота кварцевого генератора 50 МГц;
x — обороты в минуту;
fconst=200 Гц,
tсек=60 секунд;
y — микрошаги;
Подставим значения:
Один выход у контроллера, который может менять его шаги. Управляя одним сигналом можно менять только одно число.
Разрешение микрошага | MS1 | MS2 | MS3 |
Полный шаг | «0» | «0» | «0» |
Четверть шага | «0» | «1» | «0» |
Возьмем в пример полный шаг и четверть шага.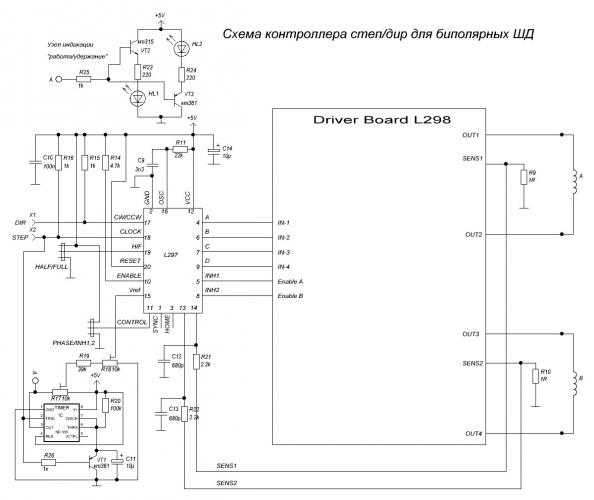 Меняется только вход MS2.
Меняется только вход MS2.
˃ 2700 об/мин — полный шаг
˂ 2700 об/мин — четверть шага
Изменяя MS2 с «0» на «1» плавно переходим с полного шага на четверть шага. В итоге, была выполнена задача плавного управления, разгоном и торможением ШД с использованием одного сигнала переключения шагов. Исходя из этого была выбрана частота перехода из полного шага в четверть шага — 2700 об/мин, что позволило добиться плавности работы ШД от 0 до 800 об/мин.
Литература:
1. Кенио Т. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ. — М.: Энергоатомиздат, 1987. — 200 с.
2. Вычужанин В. Управление шаговым электродвигателем с помощью ПЛИС: 3-е изд. Компоненты и технологии, 2004. — 96–98 с.
Основные термины (генерируются автоматически): полный шаг, четверть шага, мина, шаговый двигатель, шаг, HMF, напряжение питания драйвера, половина шага, стабильный запуск, частота срыва.
Похожие статьи
Одноканальное управление
шаговым двигателем
Эта ошибка не накапливается от шага к шагу. — Возможность быстрого старта/остановки/реверсирования.
— Возможность быстрого старта/остановки/реверсирования.
Микропроцессорное управление прецизионным токарным станком. Рис. 1. Схема драйвера управления шаговым двигателем ШД -5Д1МУ3.
Управление
шаговым двигателем с использованием…
Ключевые слова: шаговый двигатель, управление, драйвер шагового двигателя, микроконтроллер, Atmel, AVR, ATmega 16, L297, L298N, LabVIEW. В современной технике, в качестве исполнительного устройства для различных систем управления часто используют ШД.
Микропроцессорное управление прецизионным токарным станком
Блок управления шаговыми двигателями предназначен для управления лазерными, координатно-сверлильными, фрезерными
Рис. 1. Схема драйвера управления шаговым двигателем ШД-5Д1МУ3.
1. Схема драйвера управления шаговым двигателем ШД-5Д1МУ3.
Напряжение питания – 5 – 12 В; Максимальный выходной ток – 3 А.
Управление
шаговым двигателем с помощью NI MyRIO
Управление вращением ШД осуществляется посредством двух логических сигналов STEP (ШАГ) и DIRECTION (НАПРАВЛЕНИЕ). Поворот ротора ШД на один микрошаг осуществляется по активному фронту импульса сигнала STEP в сторону, заданную сигналом DIRECTION.
Определение мощности СЭУ | Статья в журнале «Молодой ученый»
Винты регулируемого шага (ВРШ), целесообразно применять на судах с переменным
При этом достигается полное использование установленной мощности двигателя.
Также, данный двигатель имеет низкую частоту вращения вала, что положительно сказывается на.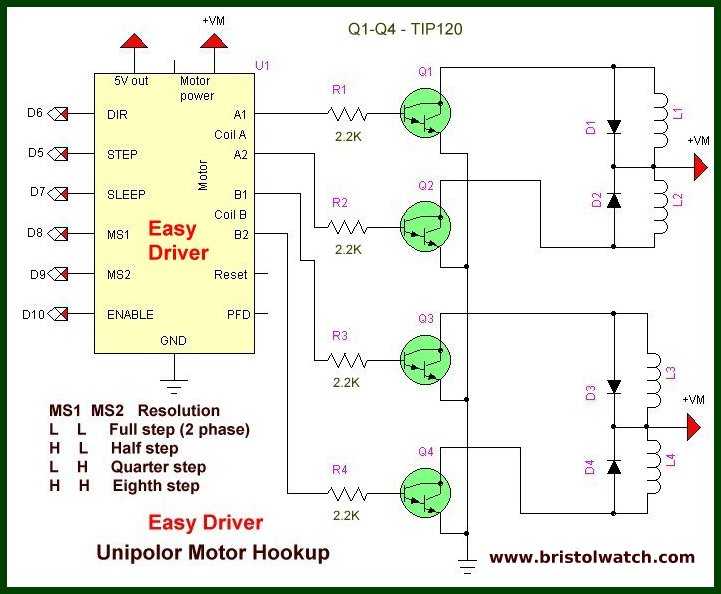 ..
..
Подбор параметров преобразователей
частоты при испытании…
Посредством преобразователей частоты производят плавный запуск электродвигателей, увеличивая частоту подводимого напряжения одновременно на обоих асинхронных двигателях с помощью преобразователей частоты до ее номинального значения.
Математическое моделирование электропривода на базе…
Шаговый двигатель управляется сигналами STEP и DIR, поступающими из блока Signal Builder (рис. 2). Сигнал STEP регулирует угловые перемещения шагового двигателя: при единичном сигнале происходит ступенчатый
Рис. 7. Напряжения на двух обмотках шагового двигателя.
Конструирование специальной оснастки для обработки винтовых.
 ..
..
Обработку винтовой канавки переменного прогрессирующего шага с сохранением
Затем напряжение преобразовывается в частоту при помощи управляемого генератора
Частота от делителя подается на электронный коммутатор, который управляет шаговым двигателем…
Моделирование прямого пуска асинхронного
двигателя с ШИМ…
Целью данной работы является овладение технологией сборки модели прямого пуска асинхронного двигателя с ШИМ в пакете SimPowerSystems для использования в лабораторных работах по дисциплинам «Математическое моделирование электромеханических систем» и…
Похожие статьи
Одноканальное управление
шаговым двигателем
Эта ошибка не накапливается от шага к шагу.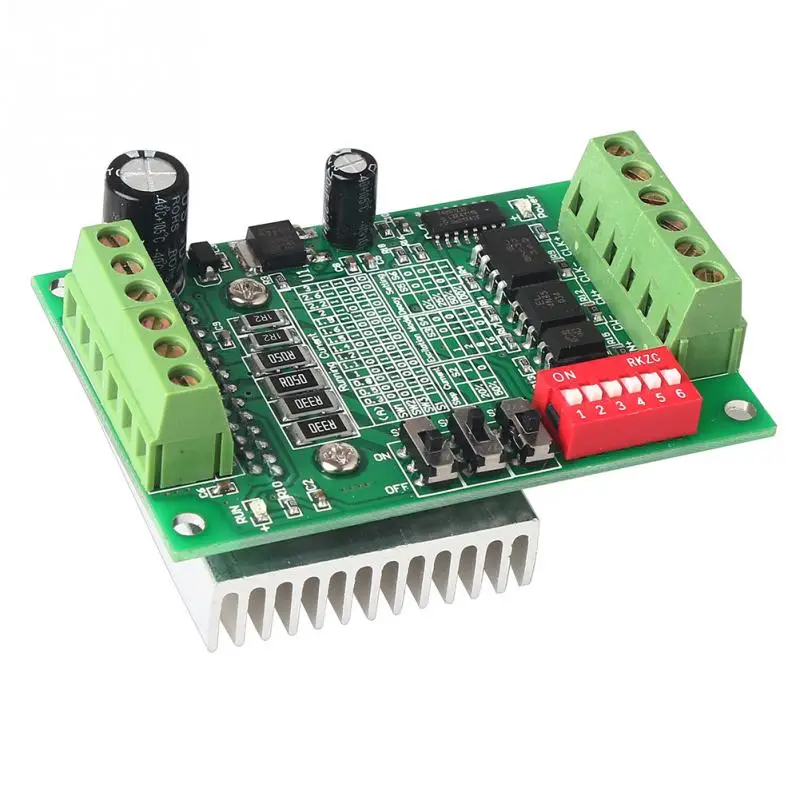 — Возможность быстрого старта/остановки/реверсирования.
— Возможность быстрого старта/остановки/реверсирования.
Микропроцессорное управление прецизионным токарным станком. Рис. 1. Схема драйвера управления шаговым двигателем ШД -5Д1МУ3.
Управление
шаговым двигателем с использованием…
Ключевые слова: шаговый двигатель, управление, драйвер шагового двигателя, микроконтроллер, Atmel, AVR, ATmega 16, L297, L298N, LabVIEW. В современной технике, в качестве исполнительного устройства для различных систем управления часто используют ШД.
Микропроцессорное управление прецизионным токарным станком
Блок управления шаговыми двигателями предназначен для управления лазерными, координатно-сверлильными, фрезерными
Рис. 1. Схема драйвера управления шаговым двигателем ШД-5Д1МУ3.
1. Схема драйвера управления шаговым двигателем ШД-5Д1МУ3.
Напряжение питания – 5 – 12 В; Максимальный выходной ток – 3 А.
Управление
шаговым двигателем с помощью NI MyRIO
Управление вращением ШД осуществляется посредством двух логических сигналов STEP (ШАГ) и DIRECTION (НАПРАВЛЕНИЕ). Поворот ротора ШД на один микрошаг осуществляется по активному фронту импульса сигнала STEP в сторону, заданную сигналом DIRECTION.
Определение мощности СЭУ | Статья в журнале «Молодой ученый»
Винты регулируемого шага (ВРШ), целесообразно применять на судах с переменным
При этом достигается полное использование установленной мощности двигателя.
Также, данный двигатель имеет низкую частоту вращения вала, что положительно сказывается на. ..
..
Подбор параметров преобразователей
частоты при испытании…
Посредством преобразователей частоты производят плавный запуск электродвигателей, увеличивая частоту подводимого напряжения одновременно на обоих асинхронных двигателях с помощью преобразователей частоты до ее номинального значения.
Математическое моделирование электропривода на базе…
Шаговый двигатель управляется сигналами STEP и DIR, поступающими из блока Signal Builder (рис. 2). Сигнал STEP регулирует угловые перемещения шагового двигателя: при единичном сигнале происходит ступенчатый
Рис. 7. Напряжения на двух обмотках шагового двигателя.
Конструирование специальной оснастки для обработки винтовых.
 ..
..
Обработку винтовой канавки переменного прогрессирующего шага с сохранением
Затем напряжение преобразовывается в частоту при помощи управляемого генератора
Частота от делителя подается на электронный коммутатор, который управляет шаговым двигателем…
Моделирование прямого пуска асинхронного
двигателя с ШИМ…
Целью данной работы является овладение технологией сборки модели прямого пуска асинхронного двигателя с ШИМ в пакете SimPowerSystems для использования в лабораторных работах по дисциплинам «Математическое моделирование электромеханических систем» и…
TB67S249FTG Компактный носитель драйвера шагового двигателя
Обзор
TB67S2x9FTG Компактный носитель драйвера шагового двигателя, вид снизу с размерами. |
|---|
Этот продукт является несущей платой или коммутационной платой для семейства драйверов шаговых двигателей Toshiba TB67S2x9FTG; поэтому перед использованием этого продукта мы рекомендуем внимательно прочитать соответствующий техпаспорт драйвера. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем и доступен в двух различных версиях: TB67S249FTG может непрерывно подавать около 1,6 А на фазу (4,5 А пиковое значение), а TB67S279FTG может непрерывно подавать около 1,1 А на фазу (2 А пиковое значение). (Дополнительную информацию см. в разделе «Соображения рассеиваемой мощности» ниже). ‘ Особенности.
Вот некоторые из основных особенностей платы:
- Простой интерфейс управления шагом и направлением
- Семь различных режимов шага: полный шаг, некруговой полушаг, круговой полушаг, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Advanced Dynamic Mixed Decay (ADMD) динамически переключается между режимами медленного и быстрого затухания, отслеживая состояние текущего затухания (не в соответствии с фиксированным временем)
- для автоматического снижения тока привода до 40 %, чтобы свести к минимуму энергопотребление и тепловыделение, когда максимальный крутящий момент не требуется.

- Напряжение питания двигателя: от 10 В до 47 В
- Максимальный длительный ток на фазу без дополнительного охлаждения:
- TB67S249FTG: 1,6 А (4,5 А пиковое значение)
- TB67S279FTG: 1,1 А (пиковое значение 2 А)
- Встроенный регулятор (не требуется внешний источник питания логики)
- Может напрямую взаимодействовать с системами 3,3 В и 5 В
- Блокировка при пониженном напряжении и защита от перегрузки по току/короткого замыкания и перегрева
- Обнаружение открытой нагрузки
- Выходы ошибки «активный-низкий» указывают на перегрузку по току, перегрев или разомкнутую нагрузку
- Компактный размер (0,6″ × 0,8″)
- 4-слойная медная печатная плата весом 2 унции для улучшенного рассеивания тепла
- Открытая площадка для пайки заземления под микросхемой драйвера в нижней части печатной платы
Можно включить конфигурируемую активную регулировку усиления (АРУ)

Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера TB67S2x9FTG, установленными, как показано на изображении продукта.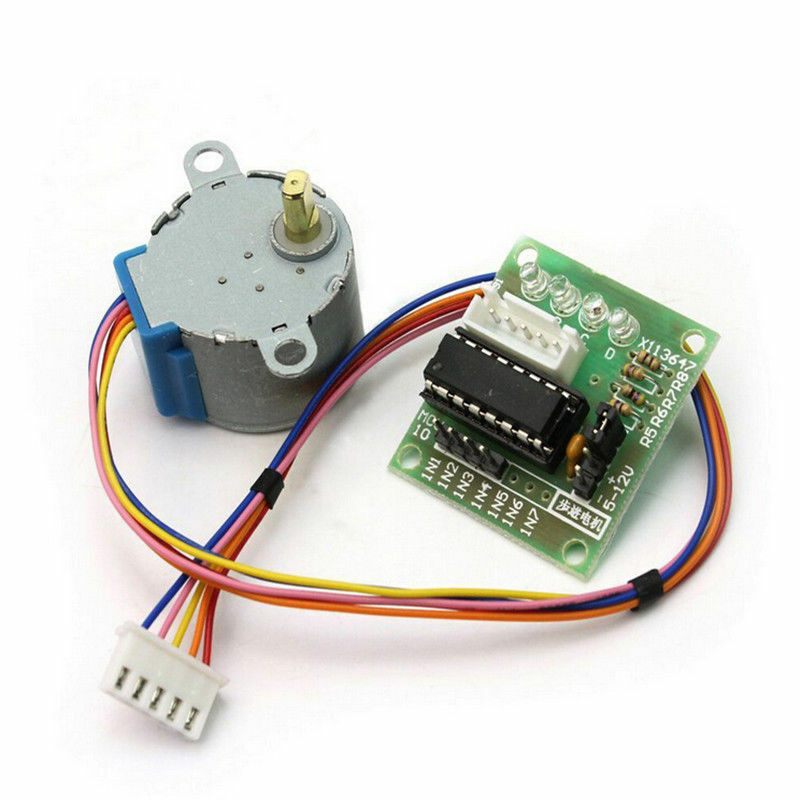
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями. Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Детали для позиции № 3096
В этой компактной версии используется TB67S249FTG и может выдавать примерно 1,6 А на фазу в непрерывном режиме без радиатора или принудительного воздушного потока (до 4,5 А пикового значения). Его можно отличить по маркировке «S249FTG» на микросхеме драйвера.
Для получения дополнительной информации об этом драйвере, пожалуйста, прочитайте техническое описание TB67S249FTG (533k pdf).
Штифты разъема включены, но не припаяны (см. артикул № 3097 для версии этого держателя с уже установленными контактами разъема).
Аппаратное обеспечение в комплекте
Компактный держатель драйвера шагового двигателя TB67S2x9FTG поставляется с одним 1×16-контактным отрывным разъемом 0,1″.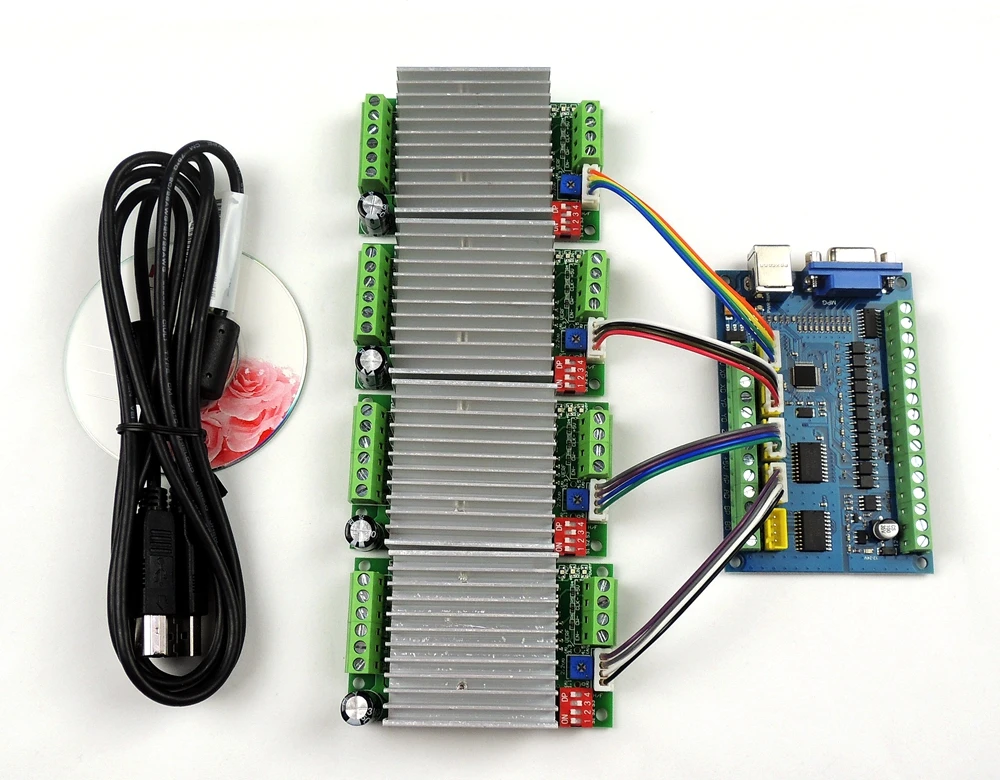 Заголовки могут быть припаяны для использования с макетными платами без пайки или 0,1-дюймовыми гнездовыми разъемами. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате.
Заголовки могут быть припаяны для использования с макетными платами без пайки или 0,1-дюймовыми гнездовыми разъемами. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате.
Использование драйвера
Минимальная схема подключения микроконтроллера к компактному носителю драйвера шагового двигателя TB67S2x9FTG. |
|---|
Соединения питания
Драйверу требуется напряжение питания двигателя от 10 В до 47 В для подключения к VIN и GND. Этот источник питания должен обеспечивать ожидаемый ток шагового двигателя.
Соединения двигателей
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться TB67S2x9FTG, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае переподключение чего-либо под напряжением вызывает проблемы.)
(В более общем случае переподключение чего-либо под напряжением вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая относится к полным шагам. . Микрошаговый драйвер, такой как TB67S2x9FTG обеспечивает более высокое разрешение, позволяя размещать промежуточные ступени, которые достигаются за счет подачи питания на катушки с промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (размера шага) (DMODE0, DMODE1 и DMODE2) позволяют выбрать одно из семи ступенчатых разрешений в соответствии с таблицей ниже. Эти три контакта имеют внутренние подтягивающие резисторы на 100 кОм, поэтому драйвер по умолчанию переходит в режим ожидания, когда эти входы остаются отключенными; по крайней мере один вывод DMODE должен быть переведен в высокий уровень, чтобы выбрать разрешение шага и позволить драйверу работать.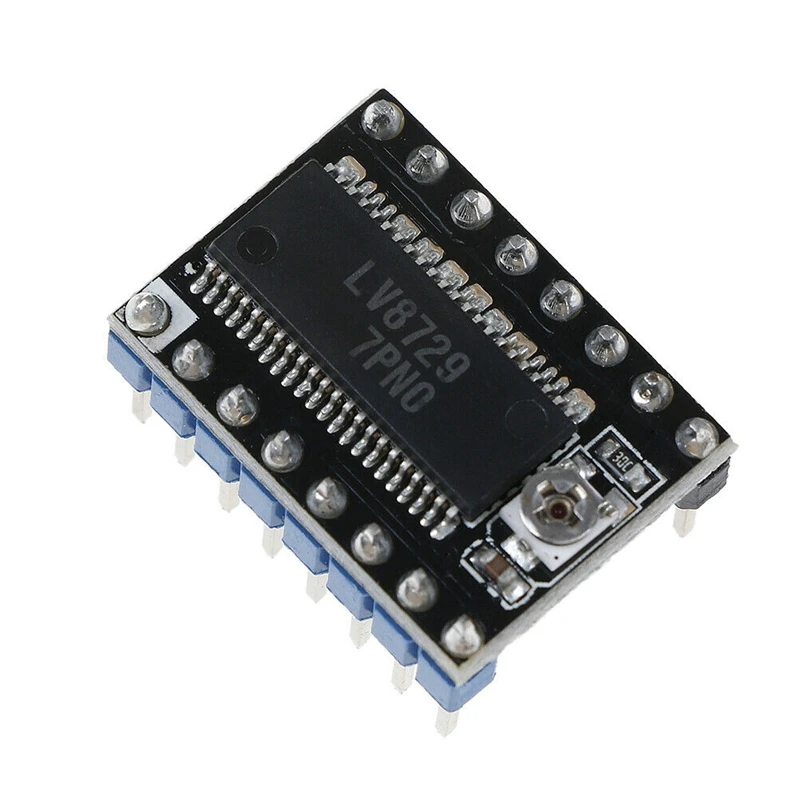 Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
| DMODE0 | DMODE1 | DMODE2 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Режим ожидания (выходы отключены) |
| Низкий | Низкий | Высокий | Полный шаг |
| Низкий | Высокий | Низкий | Некруглый полушаг («а») |
| Низкий | Высокий | Высокий | 1/4 ступень |
| Высокий | Низкий | Низкий | Круговой полушаг («b») |
| Высокий | Низкий | Высокий | шаг 1/8 |
| Высокий | Высокий | Низкий | Шаг 1/16 |
| Высокий | Высокий | Высокий | Шаг 1/32 |
Входы управления и выходы состояния
Нарастающий фронт каждого импульса на вход STEP (CLK) соответствует одному микрошагу шагового двигателя в направлении, выбранном контактом DIR (CW/CCW). Эти входы по умолчанию имеют низкий уровень через внутренние понижающие резисторы 100 кОм. Если вы просто хотите вращение в одном направлении, вы можете оставить CW/CCW отключенным.
Эти входы по умолчанию имеют низкий уровень через внутренние понижающие резисторы 100 кОм. Если вы просто хотите вращение в одном направлении, вы можете оставить CW/CCW отключенным.
Наша компактная коммутационная плата инвертирует входы для ENABLE и RESET, чтобы соответствовать распиновке наших популярных плат A4988, что делает ее подходящей заменой. По умолчанию для ENABLE устанавливается низкий уровень с помощью резистора 100 кОм, а для RESET — высокий уровень с помощью резистора 100 кОм. Вы можете отключить плату, установив высокий уровень ENABLE (она может быть подключена напрямую к логическому высокому напряжению между 2 В и 5,5 В, например, к собственному выходу VCC драйвера, или может динамически управляться через подключения к цифровым выходам MCU) .
Когда на вывод RESET подается низкий уровень, драйвер сбрасывает свой внутренний электрический угол (состояние в таблице транслятора, которое он выводит) до начального значения 45°. Это соответствует +100% ограничения тока на обеих катушках в полношаговом и некруглом полушаговом режимах и +71% на обеих катушках в других микрошаговых режимах. Обратите внимание, что, в отличие от вывода сброса на многих других шаговых драйверах, вывод RESET на компактном шасси TB67S2x9FTG не отключает выходы двигателя, когда он установлен: когда RESET низкий, драйвер будет продолжать подавать ток на двигатель, но он будет не реагировать на пошаговые входы на выводе CLK.
Обратите внимание, что, в отличие от вывода сброса на многих других шаговых драйверах, вывод RESET на компактном шасси TB67S2x9FTG не отключает выходы двигателя, когда он установлен: когда RESET низкий, драйвер будет продолжать подавать ток на двигатель, но он будет не реагировать на пошаговые входы на выводе CLK.
TB67S2x9FTG может обнаруживать несколько состояний неисправности (ошибки), о которых он сообщает, переводя один или оба контакта LO драйвера в низкий уровень (в техническом описании описано, что означает каждая комбинация LO1 и LO2). Эта коммутационная плата связывает вместе LO1 и LO2 и выводит их на вывод FAULT, а вывод FAULT подключается к VCC с помощью резистора 100 кОм на плате. Ошибки фиксируются, поэтому выходы остаются отключенными, а флаг(и) ошибки остается установленным до тех пор, пока ошибка не будет устранена путем переключения режима ожидания с помощью контактов DMODE или отключения питания драйвера. Обратите внимание, что носитель включает в себя защитный резистор 1,5 кОм последовательно с выводом FAULT, что делает безопасным подключение этого вывода непосредственно к источнику логического напряжения, что может произойти, если вы используете эту плату в системе, предназначенной для совместимого по выводам A49.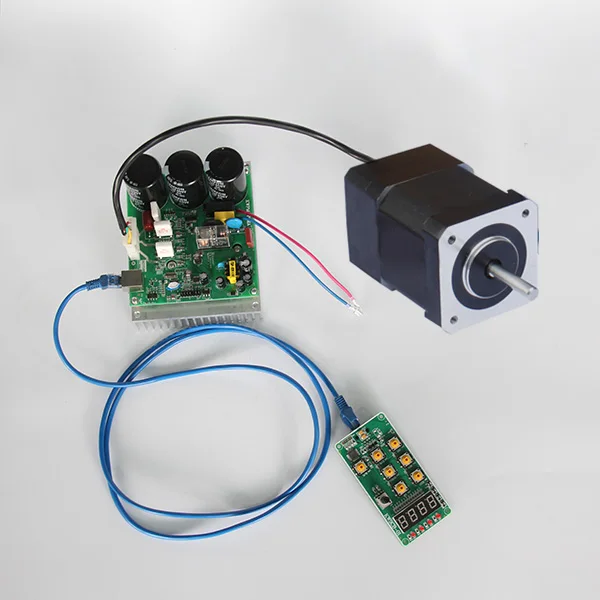 88 перевозчик.
88 перевозчик.
Ограничение тока
Для достижения высокой скорости шага питание двигателя обычно выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А при сопротивлении катушки 5 Ом, что указывает на максимальное напряжение питания двигателя 5 В. Использование такого двигателя с напряжением 10 В позволит увеличить скорость шагов, но ток должен быть активно ограничен до значения менее 1 А, чтобы предотвратить повреждение двигателя.
TB67S2x9FTG поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока:
Обычно вам нужно установить ограничение тока драйвера на уровне или ниже номинального тока вашего шагового двигателя. . Один из способов установить ограничение тока — перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без тактирования входа STEP.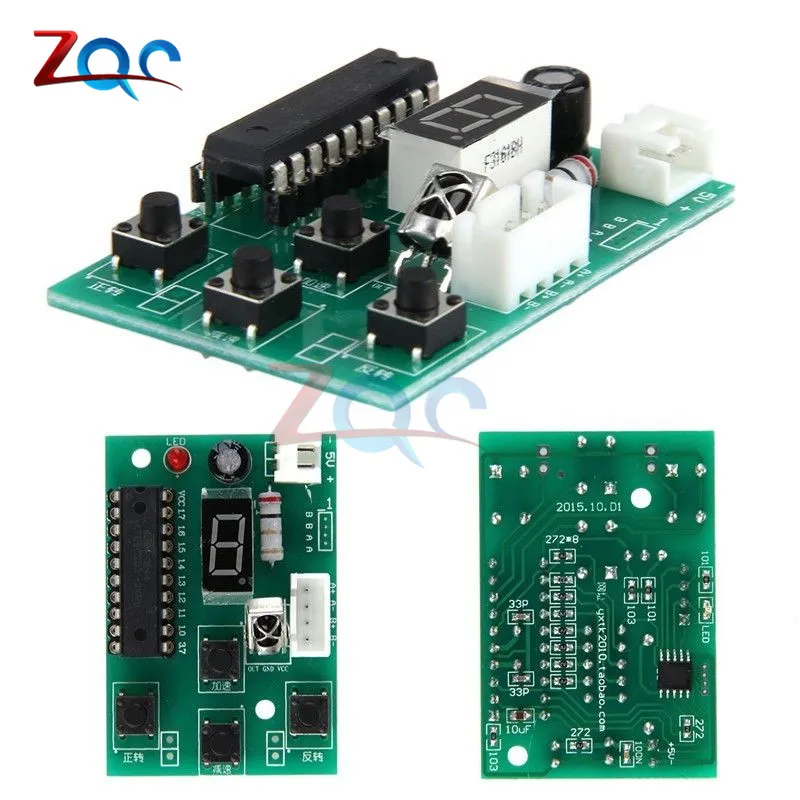 Измеренный ток будет равен пределу тока (поскольку обе катушки всегда включены и ограничены до 100% от установленного предела тока в полношаговом режиме).
Измеренный ток будет равен пределу тока (поскольку обе катушки всегда включены и ограничены до 100% от установленного предела тока в полношаговом режиме).
Другим способом установки ограничения тока является измерение напряжения VREF и вычисление результирующего ограничения тока. Напряжение на контакте VREF доступно через маленькое отверстие, обведенное кружком на нижней части печатной платы. Ограничение тока в амперах связано с эталонным напряжением в вольтах следующим образом:
| TB67S249FTG | «текст (текущий предел) = текст (VREF) * 1,25« |
|---|---|
| ТБ67С279ФТГ | «текст (текущий предел) = текст (VREF) * 0,556« |
или, перегруппированные для решения для VREF:
| TB67S249FTG | «текст(VREF) = текст(текущий предел) / 1,25« |
|---|---|
| ТБ67С279ФТГ | «текст (VREF) = текст (текущий предел) / 0,556« |
Таким образом, ограничение тока в амперах (А) равно напряжению VREF в вольтах (В), умноженному на соответствующий множитель, и если у вас есть TB67S279FTG и шаговый двигатель, рассчитанный, например, на 1 А, вы можете установить ограничить ток примерно до 1 А, установив опорное напряжение примерно на 1,8 В.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя. Если драйвер находится в полношаговом режиме, обе катушки всегда будут включены и ограничены 100% от установленного ограничения тока (в отличие от некоторых других драйверов, которые ограничивают его до 70% в полношаговом режиме). Если ваш драйвер находится в одном из режимов микрошага, ток через катушки будет меняться с каждым шагом в пределах от 0% до 100% установленного предела. Если активна активная регулировка усиления, она также дополнительно снизит фактический ток двигателя. Дополнительную информацию см. в паспорте драйвера.
Активная регулировка усиления
TB67S2x9FTG имеет функцию, называемую активной регулировкой усиления, или АРУ, которая автоматически оптимизирует ток двигателя, определяя крутящий момент нагрузки, приложенный к двигателю, и динамически уменьшая ток ниже полной величины. Это позволяет свести к минимуму энергопотребление и выделение тепла при небольшой нагрузке двигателя, но если драйвер почувствует повышенную нагрузку, он быстро увеличит ток до полного значения, чтобы попытаться предотвратить остановку двигателя.
Это позволяет свести к минимуму энергопотребление и выделение тепла при небольшой нагрузке двигателя, но если драйвер почувствует повышенную нагрузку, он быстро увеличит ток до полного значения, чтобы попытаться предотвратить остановку двигателя.
На нашем компактном носителе вывод AGC можно подтянуть к высокому уровню, чтобы активировать активную регулировку усиления с нижним ограничением тока, установленным на 60%. Если настройка 60% слишком агрессивна, вы можете поднять нижний предел тока до 80%, замкнув две контактные площадки перемычки CL0 на задней стороне платы, как показано на рисунке ниже.
Для большего контроля над настройками Active Gain Control рассмотрите наши полные коммутационные версии TB67S249FTG и TB67S279.Держатели шаговых драйверов FTG, так как они выводят все контакты конфигурации AGC (AGC0, AGC1, CLIM0, CLIM1, FLIM, BOOST и LTH).
Соображения по рассеиваемой мощности
ИС драйверов имеют максимальный номинальный ток выше, чем непрерывные токи, которые мы указываем для этих несущих плат, но фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи большего, чем указано, постоянного тока на катушку требуется радиатор или другой метод охлаждения.
Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи большего, чем указано, постоянного тока на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреть до такой степени, что обожжет вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами. Кроме того, обратите внимание, что ток катушки зависит от установленного предела тока, но не обязательно.0017 равно настройка ограничения тока, поскольку фактический ток через каждую катушку изменяется с каждым микрошагом и может быть дополнительно уменьшен, если активна активная регулировка усиления.
Кроме того, обратите внимание, что ток катушки зависит от установленного предела тока, но не обязательно.0017 равно настройка ограничения тока, поскольку фактический ток через каждую катушку изменяется с каждым микрошагом и может быть дополнительно уменьшен, если активна активная регулировка усиления.
Схематическая диаграмма
Схематическая диаграмма компактного носителя драйвера шагового двигателя TB67S249FTG/TB67S279FTG. |
|---|
Эта схема также доступна для скачивания в формате pdf (141k pdf).
Этот товар часто покупают вместе с:
| DRV8825 Держатель драйвера шагового двигателя, сильноточный |
Драйверы шаговых двигателей
Встроенные драйверы и контроллеры шаговых двигателей.
Параметрический поиск
Войдите в свою учетную запись onsemi, чтобы просмотреть избранные Сохраненные фильтры .
Зарегистрируйтесь сейчас
Сертифицировано AEC
Без галогенидов
PB Бесплатный
PPAP способен
Значение инвертирования
~ NA ~
—
1/1024
1/128
1/16
1/2
1/32
1/64
~ NA ~
.
Parallel
SPI
Serial
External
External Resistor
Fully Integrated
~NA~
Open Coil
Over-Current
Thermal
UVLO
~NA~
Invert range value
NQFP-32
QFN-32
QFN-44
QFN-48
QFNW-24
QFNW-32
SIP-19
SOIC-20W
SOIC-24
SOIC-8 NB
TQFP-64
WLCSP-10
WLCSP-40
WLCSP-8
Loading…
Last Shipments
External Resistor
QFN-44
More Details
Last Shipments
External Resistor
Thermal
QFN-48
Подробнее
Последние поставки
Полностью интегрированные
Over-Current
SOIC-24
больше информации
Последние отгрузки
0011 Fully Integrated
Thermal
NQFP-32
More Details
Last Shipments
Fully Integrated
Thermal
NQFP-32
More Details
Last Shipments
Fully Integrated
Over-Current
NQFP-32
Подробнее
Последние поставки
Полностью интегрированный
Термальный
QFN-32
Подробнее
Последние поставки
Consult Sales Office
Obsolete
Fully Integrated
Over-Current,
Open Coil,
UVLO
SOIC-8 NB,
NQFP-32
More Details
Last Shipments
Obsolete
Полностью интегрированный
UVLO,
Open Coil
SOIC-20W,
NQFP-32
Подробнее
Устаревший
Устаревший
Последние поставки
0011 NQFP-32,
SOIC-8 NB
Подробнее
Последние поставки
Полностью интегрированный
UVLO,
Over-Current,
Thermal
SOIC-20001111111111111111111111111111111111111111111111111111111111111111111111Р1П Details
Active
Serial
WLCSP-40
More Details
Lifetime
0. 2/0.3
2/0.3
0.3/0.45
1/1024
External Resistor
Thermal
TQFP-64
More Details
Active
Serial
WLCSP-10
More Details
Active
Serial
WLCSP-10
More Details
Active
Serial
WLCSP-8
Подробнее
Активный
6.0,
29.0
Полностью интегрированный
Открытая катушка
QFNW-32 10
Подробнее 219112
Подробнее0012
Fully Integrated
Open Coil
QFNW-24
More Details
Active
Fully Integrated
Open Coil
QFNW-32
More Details
Active
Fully Integrated
QFNW-32
Подробнее
Последние поставки
Полностью интегрированный
Термический
SIP-19
Подробнее
Последние поставки
Полностью интегрированный
Thermal
SIP-19
Подробнее
Последние поставки
Полностью интегрированный
Over-Current
SIP-19
Более подробная информация
Последняя партия
Полностью интегрирован
SIA
Подробнее
Последние поставки
Полностью интегрированный
Сверхтоковый
SIP-19
Подробнее
Последние поставки
Полностью интегрированный
Thermal
SIP-19
Подробнее
Последние поставки
Полностью интегрированные
Thermal
SIP-19
Подробнее
Последние отгрузки
полностью
.
Подробнее
Последние поставки
Полностью интегрированный
Сверхтоковый
SIP-19
Подробнее
Последние поставки
Полностью интегрированный
Открытая катушка
SIP-19
Подробнее
Последние поставки
Полностью интегрированные
Thermal
SIP-19
Подробнее
Последние отгрузки
111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111Р1Р11. -19
Подробнее
Последние поставки
Параллельные
Полностью интегрированные
SIP-19
Подробнее
Последние поставки
External
SIP-19
More Details
Loading…
Printer Friendly Version
PDF Format
Excel Format
CSV Format
Close Search
Products:
116
 «/>
«/>
Loading. ..
Привет, я пришел с миром!
Я ваш дружелюбный помощник по веб-сайту, и я был создан, чтобы помочь вам ориентироваться на нашем веб-сайте и показать вам наши полезные функции. Я постараюсь найти то, что вам нужно!
Приятного посещения.
Фильтры
Если вы хотите удалить какой-либо фильтр, нажмите X рядом с ним. Фильтр будет удален после сохранения изменений. Вы сделали ошибку? Нажмите серую кнопку с удаленным фильтром еще раз, и он вернется.
Проверка состояния запасов
Запасы не найдены
Обратитесь в отдел продаж
Powered by
Шаговые приводы | Applied Motion
Вы находитесь здесь
Главная » Обзор продуктов » Шаговые приводы
Просмотрите, отфильтруйте и сравните все доступные шаговые приводы
Шаговые приводы от Applied Motion Products предлагают непревзойденную производительность для современных производителей машин. С самого начала эти приводы обеспечивают лучшее в своем классе управление током для оптимальной плавности хода и крутящего момента, надежные и гибкие встроенные опции управления и связь по промышленным сетям.
Для приводов с интерфейсом EtherCAT щелкните здесь.
Просмотр, фильтрация и сравнение
Нужна помощь? Посмотрите наши часто задаваемые вопросы
Серия
Шаговые приводы STR
Шаговые приводы STF
Шаговые приводы ST
Шаговые приводы STAC5
Шаговые приводы STAC6
Одобрено UL
Напряжение питания
12 В пост. тока
24 В пост. тока
48 В пост. тока
60 В пост. тока
80 В пост. тока
120 В перем.
Режимы управления
Шаг и направление
Velocity (Oscillator)
Streaming Commands
Analog Positioning
Encoder Following
Si Programming
Q Programming
CANopen
EtherNet/IP
SiNet Hub Compatible
Modbus RTU
Modbus TCP
Выходной ток (А/фаза)
менее 2,0
2,0–3,9
4,0–5,9
более 6,0
Коммуникационные порты
RS-232
RS-485
CANopen
Ethernet
EtherNet/IP
Датчик обратной связи
Заархивированные продукты
Не заархивированные
Заархивированные продукты не рекомендуются и не доступны для новых приложений.
(выделено красным)
Цена закрытия
Нет Цена закрытия
Цена закрытия действительна только для количеств, имеющихся в настоящее время на складе.
(выделено зеленым цветом)
Пожалуйста, подождите…
| Номер модели | Напряжение питания | Режимы управления | Выходной ток, непрерывный (А/фаза) | Коммуникационные порты | Обратная связь энкодера | 1шт. | Сравнивать |
|---|---|---|---|---|---|---|---|
ST10-Плюс | 24-80 В постоянного тока |
| 0,1-10,0 А/фаза | РС-232 | № | 294,00 $ | |
ST10-Q-RE | 24-80 В постоянного тока |
| 0,1-10,0 А/фаза | РС-232, РС-485 | Да | $666,00 | |
ST10-Si-NE | 24-80 В постоянного тока |
| 0,1-10,0 А/фаза | РС-232 | Да | $1030. 00 00 | |
| 24-48 В постоянного тока |
| 1,12-4,5 А/фаза | нет данных | № | $128,00 | ||
| 24-75 В постоянного тока |
| 2,35-8,0 А/фаза | нет данных | № | $128,00 | ||
STAC6-Q | 94-135 В переменного тока |
| 0,5-6,0 А/фаза | РС-232, РС-485 | Да | $1169,00 | |
STAC6-QE | 94-135 В переменного тока |
| 0,5-6,0 А/фаза | РС-232, РС-485 | Да | $1390. 00 00 | |
STAC6-Si | 94-135 В переменного тока |
| 0,5-6,0 А/фаза | РС-232, РС-485 | Да | $1866,00 | |
STAC6-Q-220 | 94–265 В переменного тока |
| 0,5-3,2 А/фаза | РС-232, РС-485 | Да | $1388.00 | |
STAC6-Si-220 | 94–264 В переменного тока |
| 0,5-3,2 А/фаза | РС-232, РС-485 | Да | $2048.00 | |
ST10-IP-EE | 24-80 В постоянного тока |
| 0,1-10,0 А/фаза | Ethernet, EtherNet/IP | Да | $805,00 | |
STAC5-IP-E120 | 94-135 В переменного тока |
| 0,5-5,0 А/фаза | Ethernet, EtherNet/IP | Да | $578,00 | |
STAC5-IP-E220 | 94–265 В переменного тока |
| 0,5-2,55 А/фаза | Ethernet, EtherNet/IP | Да | $578,00 | |
| 12-48 В постоянного тока |
| 0,3-2,2 А/фаза | нет данных | № | $117,00 | ||
STAC6-QE-220 | 94–265 В переменного тока |
| 0,5-3,2 А/фаза | РС-232, РС-485 | Да | $1609,00 | |
| 12-48 В постоянного тока |
| 0,3-3,0 А/фаза | нет данных | № | $108,00 | ||
СТРАК2 | 90-240 В переменного тока |
| 0,5-2,5 А/фаза | нет данных | № | $464,00 | |
СТРАК8 | 90-240 В переменного тока |
| 0,5-8,0 А/фаза | нет данных | № | $549.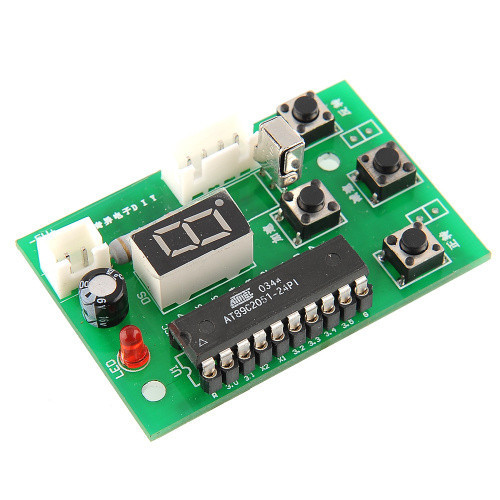 00 00 | |
| 12-48 В постоянного тока |
| 0,1-6,0 А/фаза | RS-485, CANopen, Ethernet, EtherNet/IP, EtherCAT, Ethernet, двухпортовый | № | $184,00 | ||
| 24-70 В постоянного тока |
| 0,1-10,0 А/фаза | RS-485, CANopen, Ethernet, EtherNet/IP, EtherCAT, Ethernet, двухпортовый | № | $210.00 |
Часто задаваемые вопросы
Как выбрать правильный диск для моего приложения?
Существует множество факторов, которые следует учитывать при выборе наилучшего диска для вашего приложения, поэтому мы предлагаем начать с фильтров на этой странице, чтобы ограничить количество отображаемых результатов.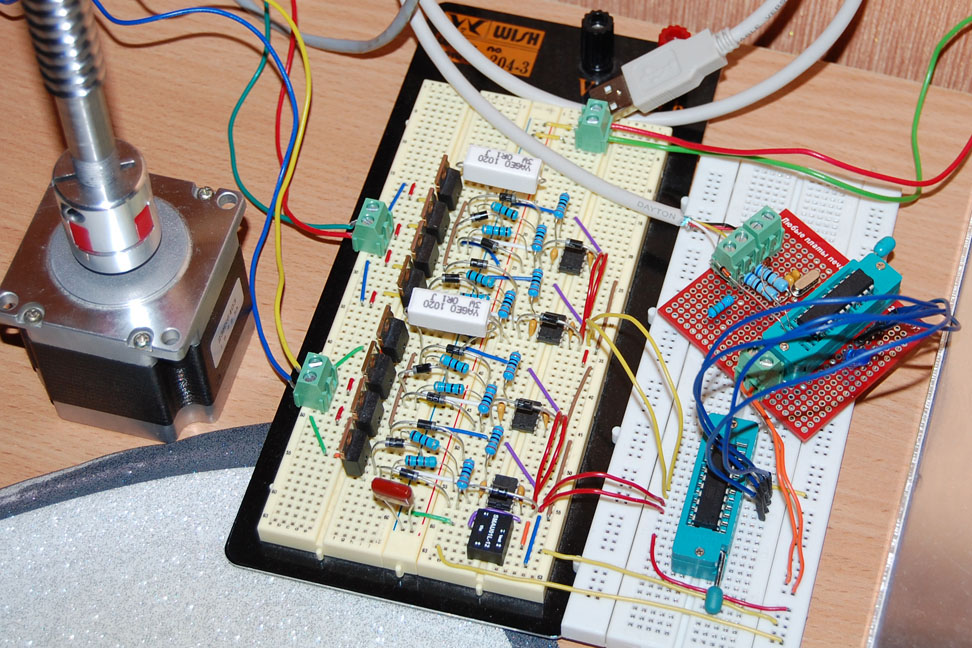 Например, если вы знаете, что вам нужен привод, который может работать от источника питания постоянного тока 24 В, выберите его в фильтре «Напряжение питания». Оттуда посмотрите на режимы управления и другие фильтры, чтобы еще больше сократить список дисков.
Например, если вы знаете, что вам нужен привод, который может работать от источника питания постоянного тока 24 В, выберите его в фильтре «Напряжение питания». Оттуда посмотрите на режимы управления и другие фильтры, чтобы еще больше сократить список дисков.
Что такое режимы управления?
Режимы управления — это основные функции управления, которые вам потребуются от вашего привода.
Какими шаговыми приводами Applied Motion можно управлять с помощью LabVIEW?
Все шаговые приводы с коммуникационным портом RS-232, RS-485 или Ethernet можно настроить для взаимодействия и получения команд непосредственно из LabVIEW. Пока накопитель настроен на режим включения SCL (настройка команды PM2), он способен получать и отвечать на сообщения, отправленные из LabVIEW через последовательное или Ethernet-соединение. Для получения дополнительной информации см. нашу страницу заметок по применению.
Почему мой шаговый привод не отображается в ST Configurator?
Программное обеспечение ST Configurator поддерживает все шаговые приводы текущего поколения (включая модели ST5, ST10, STAC5 и STAC6) и встроенные шаговые двигатели (модели STM и SWM).