Содержание
Схема драйвера шагового двигателя TB6560
Автор Steel.ne. Материал с форума cnc-club.ru
Внимание! Микросхемы Toshiba TB6560 — устарели. В 2013 г. их выпуск будет прекращен, и вместо них будут выпускаться микросхемы THB6064 и TB6600.
Микросхема Toshiba TB6560
Это драйвер биполярных шаговых двигателей. На входе управление STEP-DIR, то есть одним пином задается направление вращения, второй пин отсчитывает шаги. Есть возможность использовать микрошаг и некоторые регулировки рабочего тока. Работает до напряжения 40В, выдать может ток до 3.5А. Все. Никакой отдельной регулировки тока удержания, минимум защит.
Регулировки
Все регулировки выполняются или внешними элементами (резисторами и конденсаторами) или установкой логических уровней на определенных ногах.
1. Установка номинального тока. Регулируется резисторами на ногах 14 и 11 соответственно для обмотки A и B. Включается в разрыв земли моста. С одной стороны — упрощается внутренняя схемотехника (измерение напряжения относительно земли несколько проще), с другой стороны — любой ток, текущий на землю мимо этого резистора не учитывается и приводит к вылетанию транзисторов. К этому вернемся в разделе «Надежность». Поскольку через этот резистор течет весь рабочий ток, то на нем может выделяться до двух ватт тепла. Не забыть про это!
Включается в разрыв земли моста. С одной стороны — упрощается внутренняя схемотехника (измерение напряжения относительно земли несколько проще), с другой стороны — любой ток, текущий на землю мимо этого резистора не учитывается и приводит к вылетанию транзисторов. К этому вернемся в разделе «Надежность». Поскольку через этот резистор течет весь рабочий ток, то на нем может выделяться до двух ватт тепла. Не забыть про это!
2. Установка рабочего тока. Имеется четыре комбинации, в зависимости от уровней на ножках TQ1 и TQ2 (2 и 1 соответственно). Часто на них ставят джамперы или микропереключатели. Возможны варианты 100%, 75%, 50%, 20% от номинального. Иногда эту группу пинов обзывают Torque control.
3. Частота работы ШИМ (PWM). На самом деле регулировка тока производится отсечкой по достижении установленного значения (chopper-type PWM). Но тем не менее включение и выключение ключей происходит с некоторой частотой, которая, собственно, и задается внешним конденсатором.
4. Режимы микрошага. Выставляются комбинацией уровне на ногах M1 и M2. Возможны варианты — шаг, полушаг, 1/8 шага и 1/16 шага за один импульс STEP. Диаграммы токов, что будут на обмотках, можно глянуть в даташите. Не забываем, что чем мельче шаг, тем меньше усилие на валу двигателя.
Режимы микрошага. Выставляются комбинацией уровне на ногах M1 и M2. Возможны варианты — шаг, полушаг, 1/8 шага и 1/16 шага за один импульс STEP. Диаграммы токов, что будут на обмотках, можно глянуть в даташите. Не забываем, что чем мельче шаг, тем меньше усилие на валу двигателя.
5. Decay mode – режим гашения тока. Выставляется, как и рабочий ток, уровнями на ножках Dcy1 и Dcy2 (25 и 24 соответственно). В чем его пафос? Когда ток в обмотке достиг нужного уровня, то ключи моста закрываются. При этом, поскольку обмотка двигателя обладает значительной индуктивностью, ток в обмотке никуда не девается и ищет выход. По умолчанию он рассасывается через паразитные диоды ключей и через внешние диоды, которые обычно ставят для защиты от индуктивных скачков напряжения. Когда мы работаем в режиме шага или полушага, проблем от этого обычно не возникает. Ну рассасывается и ладно. Все равно при следующем шаге подадим обратное напряжение, все нормализуется. А вот в режиме микрошага, нам надо точно соблюдать соотношение токов в обмотках. И может получиться, что ток в обмотках будет спадать не так быстро, как нам надо. Некоторые до 1-2 тысячи шагов в секунду двигатели гоняют. И тут нам на помощь приходит принудительное гашение тока.
И может получиться, что ток в обмотках будет спадать не так быстро, как нам надо. Некоторые до 1-2 тысячи шагов в секунду двигатели гоняют. И тут нам на помощь приходит принудительное гашение тока.
Посмотрим на режимы работы транзисторов в мосту:
Charge mode – рабочий режим. Мост открыт, ток в обмотке растет.
Slow mode – когда произошла отсечка по току, то открываются два нижних транзистора. Чтобы было куда деваться току из обмотки. Паразитные диоды в транзисторах обладают неважными характеристиками, поэтому чтобы их не перегружать, открывают транзисторы, которые уже более продуктивно пропускают через себя ток. Катушка получается фактически замкнута сама на себя.
Fast mode – в этом режиме на катушку подается обратное напряжение. В этом случае ток гасится максимально эффективно.
Все эти пляски происходят с частотой ШИМ, то есть Charge-Slow-Fast и опять по кругу. Так вот, настройки decoy mode и определяют, когда включится Fast режим. При установке Slow mode он не используется вообще, при увеличении процентов — включается все ранее.
При установке Slow mode он не используется вообще, при увеличении процентов — включается все ранее.
Смотрим на картинку:
Один период управления ШИМ происходит в течение четырех тактов управляющего генератора (частота которого, как мы помним, задается внешним конденсатором). Соответственно fast mode либо не используется, либо включается в последнем такте (25%), либо в двух последних (50%) или сразу (100%) по достижении установленного тока.
Никакого анализа, нужен шаг в этот момент или не нужен не происходит. И эти качели происходят всегда, даже когда двигатель стоит. При этом возникают пульсации тока в обмотке, что вызывает повышенный писк двигателей на частоте управления ШИМ.
Когда надо включать этот режим? Когда двигатели имеют большую индуктивность и требуется высокая скорость микрошага. В остальных случаях он бесполезен.
Надежность.
Эти драйверы не прощают ошибок. Если хотя бы один провод двигателя замкнется на землю — вылетают со спецэффектами. Это происходит как раз потому, что токоизмерительные резисторы включены в разрыв земли, и любой ток, не проходящий через этот резистор не учитывается, что приводит к моментальному выходу из строя верхних транзисторов.
Это происходит как раз потому, что токоизмерительные резисторы включены в разрыв земли, и любой ток, не проходящий через этот резистор не учитывается, что приводит к моментальному выходу из строя верхних транзисторов.
Также если перепутать провода при подключении, также недопустимы межфазные замыкания. При этом ток через транзистор обмотки А потечет через резистор обмотки В, что также приведет к выгоранию. Очень критичен порядок подачи питающих напряжений — сначала низкое (5 вольт на питание логики) и только потом — высокое (на питание двигателей). На последних платах с этим драйвером я даже заметил отдельные стабилизаторы 5вольт для каждого драйвера, что практически исключает отсутствие низкого напряжения при начале работы. Включать драйвера без подключения двигателя можно, проблем не будет. Крутить двигатели при отсутствии питания драйверов — запрещено. Двигатели вполне могут создать напряжение выше допустимых 40 вольт. При нормальной работе напряжение самоиндукции утилизируется источником питания или демпферными схемами.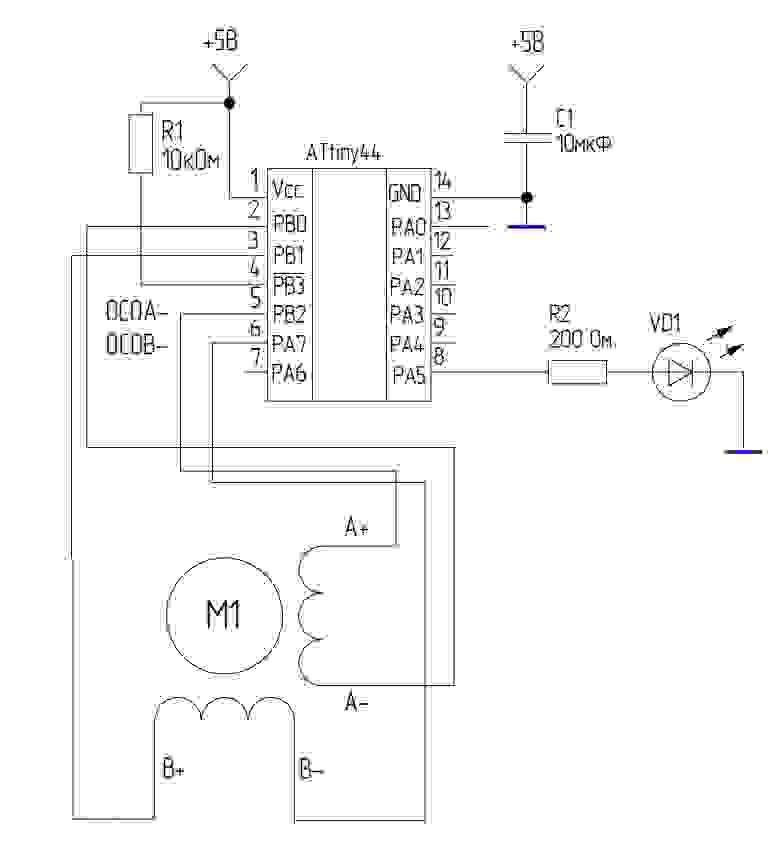 При отключенном источнике питания — только пробитыми транзисторами.
При отключенном источнике питания — только пробитыми транзисторами.
Шаговые двигатели 57 мм со встроенным драйвером SMD-2.8mini ver.2
Заказать
| Напряжение питания, В | 12 – 24 |
| Величина полного шага, град | 1,8 |
| Дробление шага | 1/1… 1/256 |
| Макс. осевое биение вала двигателя, мм | 0.08 |
| Мин. осевое биение вала двигателя, мм | 0.02 |
| Управление шаговым двигателем | Импульсное STEP/DIR, команды по RS-232 |
Скачать паспорт .pdf
Шаговый двигатель с интегрированным драйвером SMD-2.8mini ver.2 – это готовое решение шагового привода компактных размеров. Шаговый привод предназначен для контролируемого вращения полезной нагрузки в соответствии с сигналами, поступающими на управляющие входы драйвера. Шаговые двигатели с фланцем 56 мм (NEMA 23) широко распространены в небольших ЧПУ станках, оборудовании для упаковки, робототехнике. Компактные размеры привода позволяют размещать его в небольших системах, не выделяя отдельное место для размещения драйвера. Подобрать кронштейн для крепления здесь
Шаговый привод предназначен для контролируемого вращения полезной нагрузки в соответствии с сигналами, поступающими на управляющие входы драйвера. Шаговые двигатели с фланцем 56 мм (NEMA 23) широко распространены в небольших ЧПУ станках, оборудовании для упаковки, робототехнике. Компактные размеры привода позволяют размещать его в небольших системах, не выделяя отдельное место для размещения драйвера. Подобрать кронштейн для крепления здесь
Модели шаговых мини-двигателей
FL57STH76-2804А
с SMD-2.8mini ver.2
Фланец
57 x 57 мм
Момент
18.9 кгс*см
Напряжение
12 — 24 В
Шаг
1.8°
Инерция ротора
480 г*см2
Сопротивление
1,13 Ом
Индуктивность
3,6 мГн
Ток фаз
2,8 А
Заказать
ШД5776-3.
 0A
0A
с SMD-2.8mini ver.2
Фланец
57 x 57 мм
Момент
20 кгс*см
Напряжение
12 — 24 В
Шаг
1.8°
Инерция ротора
480 г*см2
Сопротивление
0.9 Ом
Индуктивность
3,5 мГн
Ток фаз
3,0 А
Заказать
Габаритные и присоединительные размеры
FL57STH76-2804А
с SMD-2.8mini ver.2ШД5776-3.0A
c SMD-2.8mini ver.2
Характеристики SMD‑2.8mini ver.2
Рабочее напряжение питания
12 – 48 В
Диапазон установки тока фазы
1,0 — 1,8 А
Дробление шага
1 — 1/256
Допустимый ток удержания
30%, 50%,
70%, 100%
Минимальная длина импульса «Шаг»
3 мкс
Входное напряжение управляющих
сигналов «высокого» уровня
5В/24В
Входное напряжение управляющих
сигналов «низкого» уровня
0…1В
Режимы управления
Импульсное управление
положением STEP/DIR,
Управление командами
по RS-232
Преимущества двигателей SMD–2.
 8mini ver.2
8mini ver.2
- Законченное изделие — двигатель + блок управления. Нет необходимости производить их взаимную коммутацию. Двигатель и блок подключены и настроены для оптимальной работы;
- Экономия места. Не нужно предусматривать дополнительное установочное место для блока управления;
- Отсутствие лишних проводов, которые могли бы понизить надежность конструкции, особенно в подвижных механизмах ЧПУ-станков.
Отличие драйвера от других исполнений
Принципиальное отличие этого драйвера от предыдущих исполнений — новая конструкция и улучшенная схемотехника, которые обеспечивают быстрый разгон и сохранение значительного крутящего момента на высоких скоростях. Разгон до скоростей 1000 об/мин и более может осуществляться за доли секунды. Рабочая скорость более 4000 об/мин с поддержанием крутящего момента, достаточного для выполнения полезной работы теперь доступна для большинства моделей шаговых двигателей.
Примеры подключения драйвера SMD–2.8mini ver.2
При управлении шаговым приводом импульсными логическими сигналами драйвер обрабатывает входные сигналы ШАГ (импульс), НАПРАВЛЕНИЕ (уровень) и РАЗРЕШЕНИЕ (уровень).Входы управления могут подключаться с общим катодом и общим анодом.
Для настройки параметров или управления шаговым приводом по RS-232 необходимо подключение по RS-232. Для большинства компьютеров без встроенного COMпорта необходимо использовать преобразователь интерфейса RS-232/USB.
Общая схема подключения
Схема подключения логических сигналов – общий катодСхема подключения логических сигналов – общий анод
Подключение преобразователя интерфейса к драйверу SMD–2.8mini ver.2
Соединение преобразователя интерфейса USB-UART c драйвером SMD–2.8mini ver.2 показано на схеме. Контакты RX и TX драйвера подключаются к контактам TXD и RXD преобразователя соответственно.
Программное обеспечение для параметризации и управления SMD–2.8miniver.2 по RS-232
Для настройки и управления шаговым приводом со встроенным драйвером SMD‑2.8miniver.2 по интерфейсу RS‑232 мы предоставляем две программы:CONFIG SMD‑2.8MINI/SMD‑2.8MINI (для настройки параметров привода) и SMD mini control (для настройки параметров и управления приводом)
Готовое программное обеспечение SMD mini control предназначено для быстрой параметризации блоков, а также для выполнения заданного перемещения, установки скорости и ускорения, запуска и остановки двигателя, включения/выключения фаз двигателя
Связаться с нами
Хотите узнать дополнительную информацию о продукции — задайте вопрос. Наш специалист свяжется с вами в ближайшее время.
Схема драйвера для шагового двигателя своими руками
Блок управления шаговым двигателем Доброго здоровья всем.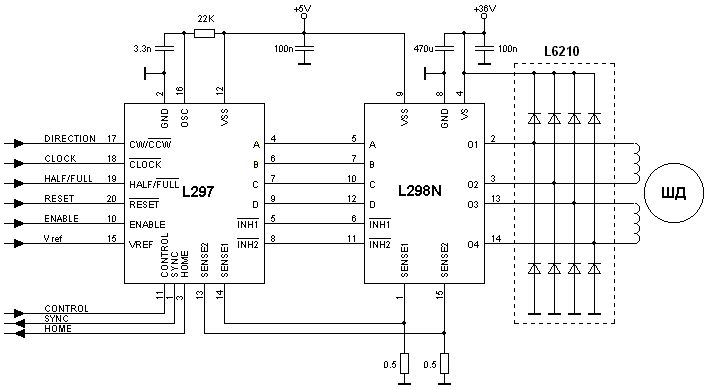 За последние годы у меня скопилась куча шаговых двигателей, да все руки до них не доходили, а ведь шаговик штука очень интересная и нужная. Да, еще в Интернете прочитал, что много нашего брата мучаются с запуском таких двигунов, вот и решил сделать контроллер для проверки наиболее часто встречающихся шаговых двигателей. Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов.
За последние годы у меня скопилась куча шаговых двигателей, да все руки до них не доходили, а ведь шаговик штука очень интересная и нужная. Да, еще в Интернете прочитал, что много нашего брата мучаются с запуском таких двигунов, вот и решил сделать контроллер для проверки наиболее часто встречающихся шаговых двигателей. Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов.
Поиск данных по Вашему запросу:
Схема драйвера для шагового двигателя своими руками
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Простой в изготовлении контроллер шагового двигателя из старых деталей
- простая схема управления шаговым двигателем
- Главное меню
- Как запустить шаговый двигатель без электроники
- Драйвер шагового двигателя своими руками
- Драйвер шагового двигателя своими руками
- Как работает шаговый электродвигатель?
- Драйвер шагового двигателя cw 5045
- Уважаемый Пользователь!
- Драйвер биполярных шаговых двигателей
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Самодельный драйвер для униполярного шагового двигателя
 youtube.com/embed/KAw2yoU90Is» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/KAw2yoU90Is» frameborder=»0″ allowfullscreen=»»/>
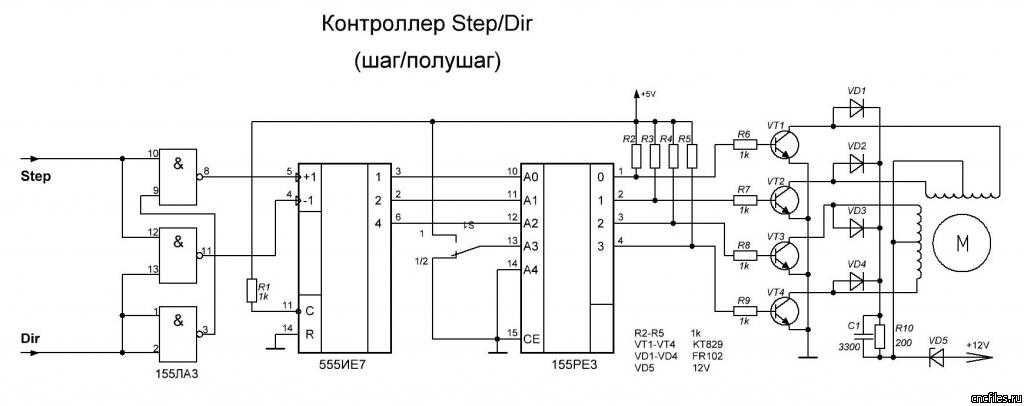
Простой в изготовлении контроллер шагового двигателя из старых деталей
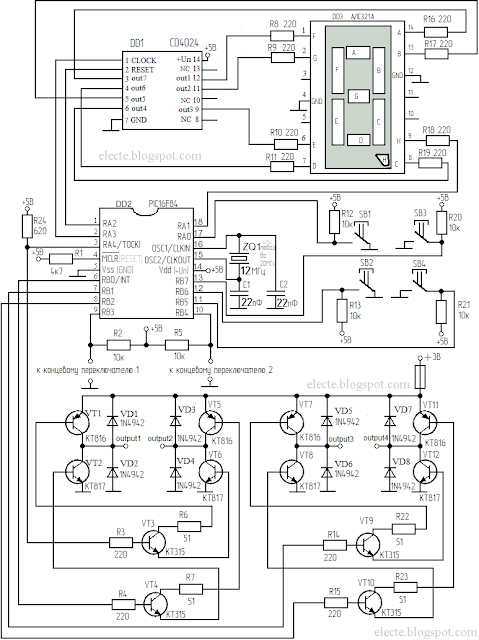
Схема управления шаговым двигателем приведена на рисунке 1. Схема реализована на микросхемах простой логики. В качестве мощных ключей для коммутирования обмоток шагового двигателя применены составные транзисторы КТА, способные выдерживать ток до семи ампер.
При нажатии на одну из кнопок двигатель начинает вращаться в ту или иную сторону. Кнопки использованы двойные, поэтому при их отпускании размыкается и цепь питания обмоток шагового двигателя, что исключает протекание сквозных токов при остановке двигателя.
Но есть ситуации, когда для удержания ротора двигателя в нужном положении, необходимо, чтобы через одну из обмоток протекал удерживающий ток. В этом случае контроллер должен автоматически понизить напряжение питания обмоток двигателя до необходимой величины.
В данной схеме этой опции нет, здесь напряжение питания снимается с обмоток двигателя полностью. На микросхеме DD1 собран генератор импульсов, изменение частоты этого генератора влечет за собой изменение частоты вращения шагового двигателя. Каждый импульс данного генератора поворачивает ротор на один шаг. Схема обеспечивает работу шагового двигателя в полушаговом режиме. Осциллограммы импульсных последователей полушагов показаны на скриншоте 1. Все обмотки двигателя зашунтированы демпфирующими диодами, устраняющими коммутационные выбросы напряжения.
Максимальное входное напряжение этой равно35В. Так что и максимальное напряжение питания двигателя будет равно 35В. Почти все элементы схемы смонтированы на печатной плате. На плате нет микросхемного стабилизатора напряжения, демпфирующих диодов, кнопок и конденсаторов фильтра. При необходимости их можно разместить на плате, изменив немного ее топологию. Скачать схему и рисунок печатной платы можно здесь.
Имя обязательно. Почта обязательно. Ответ: В условиях задачи цифры римские, а в ответе обычные — арабские. Подпишись на RSS и получай обновления блога! Поиск по сайту. Опубликовал admin Дата 10 января, Рубрика: Двигатели. Обсудить эту статью на — форуме «Радиоэлектроника, вопросы и ответы». Метки: Шаговые двигатели. Читайте также: Автоматическое отключение пусковых конденсаторов электродвигателей Коллекторный двигатель постоянного тока Д-5ТР Управление шаговым двигателем Регулятор оборотов микродрели на PIC-контроллере Контроллер для проверки шагового двигателя Реверсирование электродвигателей.
Ответ: В условиях задачи цифры римские, а в ответе обычные — арабские. Подпишись на RSS и получай обновления блога! Поиск по сайту. Опубликовал admin Дата 10 января, Рубрика: Двигатели. Обсудить эту статью на — форуме «Радиоэлектроника, вопросы и ответы». Метки: Шаговые двигатели. Читайте также: Автоматическое отключение пусковых конденсаторов электродвигателей Коллекторный двигатель постоянного тока Д-5ТР Управление шаговым двигателем Регулятор оборотов микродрели на PIC-контроллере Контроллер для проверки шагового двигателя Реверсирование электродвигателей.
Подпишись на RSS! Получать обновления по электронной почте:. Полное или частичное копирование материалов запрещено. При согласованном использовании материалов сайта активная ссылка обязательна.
простая схема управления шаговым двигателем
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Речь в этой статье идет о простых драйверах, достаточных для большинства приложений. Существуют драйверы с гораздо большими возможностями:. По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Драйвер униполярного шагового двигателя. Напомню принцип управления униполярным шаговым двигателем.
Существуют драйверы с гораздо большими возможностями:. По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Драйвер униполярного шагового двигателя. Напомню принцип управления униполярным шаговым двигателем.
Схема униполярного драйвера шагового двигателя на биполярных двигателя USB на микроконтроллере AVR своими руками — схема своими руками.
Главное меню
Ниже представлена принципиальная схема драйвера биполярных шаговых двигателей с двумя L усиленный 48В, 4А. Данный драйвер может использоваться для управления практически любых 2-фазных биполярных гибридных шаговиков с 4 выводами и может обеспечить ток работы до 4 ампер при максимальном напряжении 35В. Цепочкой R9 и C15 можно подбирать частоту ШИМ, при указанных номиналах она выше диапазона слышимых звуков, так что движок не жужжит. Потенциометром RV1 устанавливается рабочий ток двигателя. Если будете гонять на максимальной мощности , то нужно обязательно посадить его на хороший радиатор и поставить кулер, также не забудьте намазать термопастой.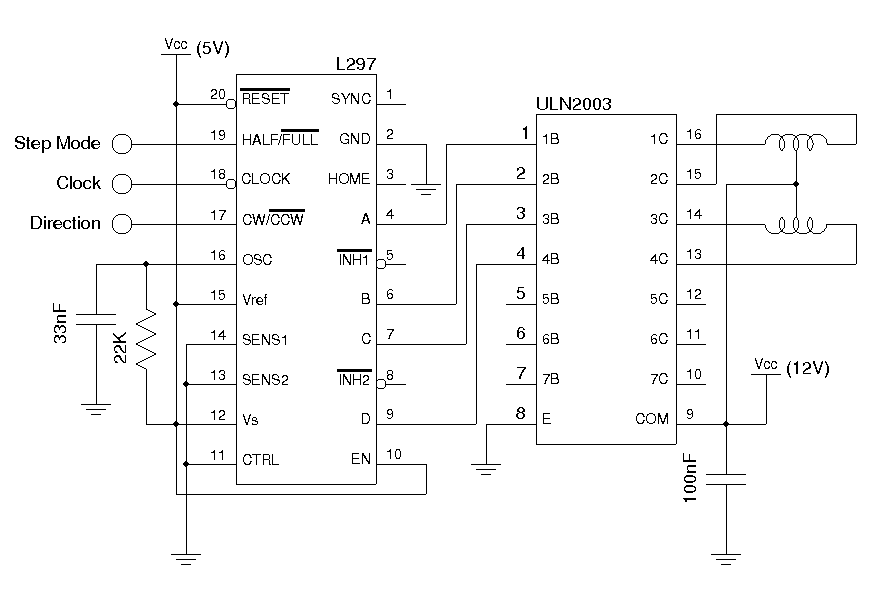 Скачать список элементов PDF. Средний балл статьи: 0 Проголосовало: 0 чел. Для добавления Вашей сборки необходима регистрация. Оставить комментарий. Обнаружен блокировщик рекламы.
Скачать список элементов PDF. Средний балл статьи: 0 Проголосовало: 0 чел. Для добавления Вашей сборки необходима регистрация. Оставить комментарий. Обнаружен блокировщик рекламы.
Как запустить шаговый двигатель без электроники
Пользователь интересуется товаром NR07 — Электронный конструктор «Источники питания» — серия Азбука электронщика арт. Пользователь интересуется товаром NR04 — Электронный конструктор «Классика схемотехники» — серия Азбука электронщика. Пользователь интересуется товаром MP — Универсальные часы реального времени RTC c управлением нагрузками по 4 каналам. Пользователь интересуется товаром NR05 — Электронный конструктор «Цифровая лаборатория» — серия Азбука электронщика.
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Драйвер шагового двигателя своими руками
С какого то принтера. Просто так этот двигатель не запустить нужен драйвер или контроллер кто может подсказать схему драйвера или контроллера, буду очень признателен заранее спасибо. Для сверления ПП нужны высокие обороты шпинделя. Для этого лучше подойдет коллекторный двигатель, а шаговый — нет! У шагового двигателя совершенно другое предназначение. Дело не столько в оборотах, сколько в материале.
Для сверления ПП нужны высокие обороты шпинделя. Для этого лучше подойдет коллекторный двигатель, а шаговый — нет! У шагового двигателя совершенно другое предназначение. Дело не столько в оборотах, сколько в материале.
Драйвер шагового двигателя своими руками
С его помощью можно проверить работу USB контроллера, зажигать его и гасить по команде из программы. Не считая того существует аппаратный шим, который автоматом врубается на линиях в микроконтроллере AVR через таймер счетчик. Управление движком подключается к контактам PB0, на другие вольные — контакты можно в будующем подключить еще движки и рабочие инструменты, PB1, PB2, но пока они пустуют, PB3. Мост — это особая схема соединения транзисторов, которая дозволяет подавать через их напряжение высочайшего уровня 24V в различных направлениях. Отдельное большое фото драйвера шагового двигателя: сходу подключать питание высочайшего уровня 24V к схеме и шаговый движок не рекомендую. Чтоб крутить шаговый движок, рекомендую сначало раздельно собрать и проверить работу лишь USB контроллера, 2 перед тем как собирать это сложное устройство, его я уже собрал вот тут — контроллер USB, надо: 1 собрать устройство — USB контроллер шагового мотора на микроконтроллере AVR и драйвер шагового мотора. Их перебор крутит движок.
Их перебор крутит движок.
Блок управления шаговым двигателем на таймере NE (КРВИ1). Безупречные? А теперь посмотри на реальные фото Управляется данный двигатель с помощью электронной схемы – драйвера.
Как работает шаговый электродвигатель?
Схема драйвера для шагового двигателя своими руками
Создавая станок с ЧПУ своими руками , большинство на начальном этапе останавливается на выборе покупного чаще всего — китайского контроллера для шаговых двигателей, потому как это экономит время. Но уже после того, как станок готов и запущен, начинает закрадываться ощущение, что что-то не то… Чего-то не хватает или что-то сделано не правильно, или не доделано… Появляется некоторое недовольство, вопросы, связанные с точностью станка с ЧПУ. И так действительно происходит!
Драйвер шагового двигателя cw 5045
ВИДЕО ПО ТЕМЕ: Шаговый Двигатель Без Драйвера — Stepper Motor Run Without Driver
 youtube.com/embed/PVylCDeHET4″ frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/PVylCDeHET4″ frameborder=»0″ allowfullscreen=»»/>
Для управления шаговыми двигателями используют специальные устройства — драйверы шаговых двигателей. Популярный драйвер шагового двигателя А работает от напряжения В и может обеспечить ток до 1 А на фазу без радиатора. Рисунок 4. Схема подключения для управления скоростью и направлением движения. База знаний.
У меня много различной оргтехники, которая вышла из строя.
Уважаемый Пользователь!
Началось мое станкостроение со случайной ссылки на немецкий станок за DM, который на мой взгляд выглядел по детски, однако мог выполнять довольно много занятных функций. В тот момент, меня заинтересовала возможность рисовать платы это было еще до появления в моей жизни ЛУТ. В результате протяженных поисков в сети было найдено несколько сайтов посвященных этой проблеме, однако русскоязычных среди них не было ни одного это было примерно 3 года назад. Все собрал, запустил. Что получил, а получил дико греющиеся микросхемы ключей, и с трудом вращающийся двигатель.
Драйвер биполярных шаговых двигателей
Драйвер шагового двигателя своими руками — хотя биполярные шаговые двигатели относительно дороги, для своих физических размеров они обеспечивают высокий вращающий момент. Однако для двух обмоток мотора требуется восемь управляющих транзисторов, соединенных в четыре Н-моста. Каждый транзистор должен выдерживать перегрузки и короткие замыкания и быстро восстанавливать работоспособность. А драйверу, соответственно, требуются сложные схемы защиты с большим количеством пассивных компонентов.
Драйвер шагового двигателя с микрошаговым режимом
В статье представлены схема и конструкция, описан принцип действия драйвера биполярного шагового двигателя на базе микроконтроллера ATmega48. Он способен работать со многими двигателями, не содержит специализированных микросхем для управления шаговыми двигателями. Универсальность обеспечена оригинальным методом поддержания заданного тока в обмотках двигателя. Эта конструкция может послужить основой для создания аналогичных устройств, содержащих дополнительные элементы безопасности — опторазвязку входных цепей, защиту от замыкания нагрузки и пр. В описываемом устройстве в связи с предполагаемыми «умеренными»условиями его эксплуатации и для ограничения стоимости такие узлы не предусмотрены.
Эта конструкция может послужить основой для создания аналогичных устройств, содержащих дополнительные элементы безопасности — опторазвязку входных цепей, защиту от замыкания нагрузки и пр. В описываемом устройстве в связи с предполагаемыми «умеренными»условиями его эксплуатации и для ограничения стоимости такие узлы не предусмотрены.
Целью разработки было создание простого и недорогого драйвера биполярного шагового двигателя универсального применения. Всё программное обеспечение написано на языке ассемблера AVRASM и оптимизировано по времени выполнения, что позволило решить задачу на имеющейся на момент разработки элементной базе.
Основные технические характеристики
Напряжение питания силовой части, В ……………….27
Напряжение питания логической части, В …………….12
Максимальная амплитуда тока фазы двигателя, А, не менее ………………….. 5
Минимальная амплитуда тока фазы двигателя, А, не более …………………..0,25
Предустанавливаемый коэффициент деления шага .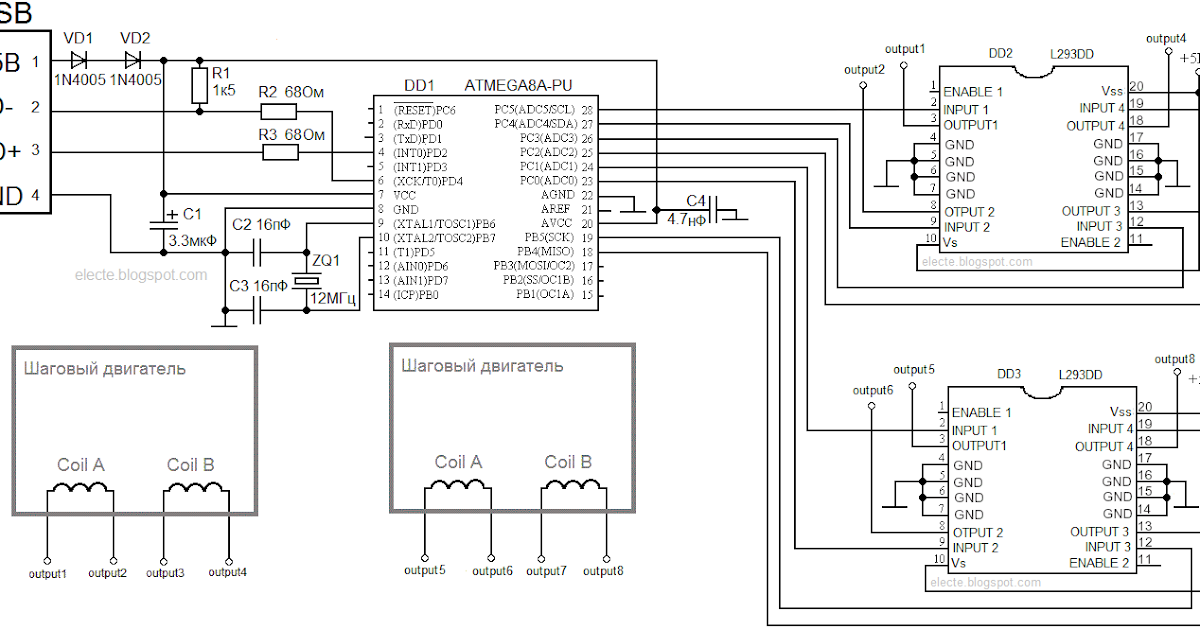 .. .1/8, 1/4, 1/2, 1/1
.. .1/8, 1/4, 1/2, 1/1
Автопонижение тока в режиме удержания, %……………65
Задержка автопонижения тока относительно последнего шага, с …………..3,4
Уровни управляющих сигналов ………………….ТТЛ,5 В
Максимальная частота шагов, кГц…………………..12
Габариты, мм ………….102x68x40
Принципиальная схема драйвера приведена на рис. 1 . В его основу положены мостовые формирователи тока фаз А и В на полевых транзисторах VT1-VT4, VT5-VT8 соответственно, управляемые специализированными микросхемами-драйверами верхних и нижних ключей полумоста DA5-DA8 IR2104S. Для повышения помехоустойчивости применено раздельное питание силовой части (27 В) и логической части с драйверами силовых ключей (12 В).
Рис. 1. Принципиальная схема драйвера
Далее рассмотрим часть схемы, относящуюся к одной из фаз (фазе А), поскольку часть, относящаяся к фазе В, действует аналогично.
Мгновенное значение тока фазы устройство определяет по падению напряжения на резисторе R45, которое через интегрирующую цепь R5C6 поступает на неинвертирующий вход усилителя DA1. 1 с регулируемым коэффициентом усиления, выполняющего также функцию ФНЧ первого порядка. С выхода усилителя сигнал приходит на инвертирующий вход компаратора DA3.1. Компаратор сравнивает сигнал, пропорциональный текущему через фазу двигателя току, с образцовым напряжением. Его формирует в виде ступенчатой синусоиды (для микрошагового режима работы) Таймер 1 микроконтроллера, работающий в режиме «Быстрая ШИМ» без предварительного деления. Сигнал с выхода таймера пропущен через многозвенный фильтр R1C1R3C4R7C8. Период следования широтно-модулированных импульсов — 12,7 мкс, что соответствует частоте 78,4 кГц. Резистор R23 в рабочем режиме в формировании образцового напряжения не участвует, так как выход PB3 микроконтроллера, к которому он подключён, находится в высокоимпедансном состоянии.
1 с регулируемым коэффициентом усиления, выполняющего также функцию ФНЧ первого порядка. С выхода усилителя сигнал приходит на инвертирующий вход компаратора DA3.1. Компаратор сравнивает сигнал, пропорциональный текущему через фазу двигателя току, с образцовым напряжением. Его формирует в виде ступенчатой синусоиды (для микрошагового режима работы) Таймер 1 микроконтроллера, работающий в режиме «Быстрая ШИМ» без предварительного деления. Сигнал с выхода таймера пропущен через многозвенный фильтр R1C1R3C4R7C8. Период следования широтно-модулированных импульсов — 12,7 мкс, что соответствует частоте 78,4 кГц. Резистор R23 в рабочем режиме в формировании образцового напряжения не участвует, так как выход PB3 микроконтроллера, к которому он подключён, находится в высокоимпедансном состоянии.
В режиме удержания (после отсутствия импульсов на входе «Шаг» в течение последних 3,4 с) программа устанавливает на выходе PB3 микроконтроллера низкий логический уровень, и амплитуда образцового сигнала понижается.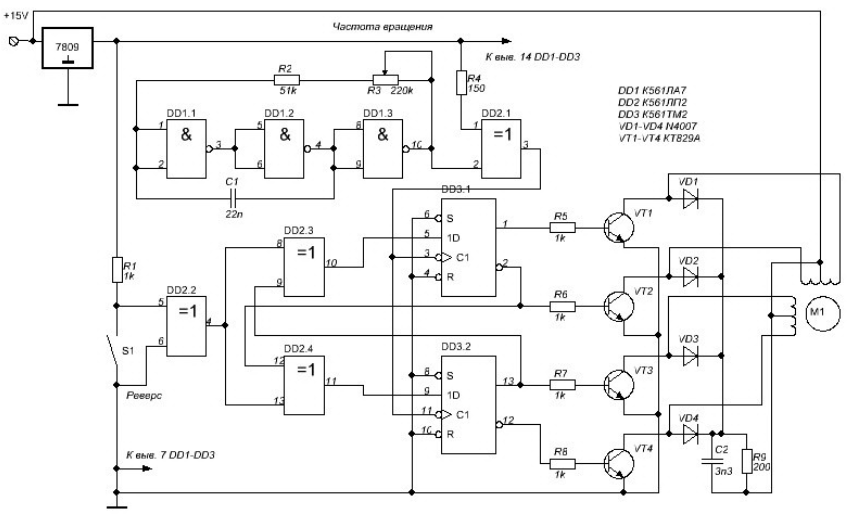 С выхода компаратора DA3.1 с открытым коллектором, нагруженного резистором R25, результат сравнения поступает на вход компаратора DA3.2. Выход компаратора DA3.1 связан также с общим проводом через конденсатор C22. Совместно R25 и C22 — времязадающая цепь узла стабилизации тока. При его падении ниже некоторого образцового уровня происходит зарядка конденсатора C22 через резистор R25. В интервале времени от начала зарядки до достижения напряжением на конденсаторе значения, заданного делителем напряжения R27R28, питание обмотки двигателя отключено, что препятствует быстрым флюктуациям тока около образцового значения.
С выхода компаратора DA3.1 с открытым коллектором, нагруженного резистором R25, результат сравнения поступает на вход компаратора DA3.2. Выход компаратора DA3.1 связан также с общим проводом через конденсатор C22. Совместно R25 и C22 — времязадающая цепь узла стабилизации тока. При его падении ниже некоторого образцового уровня происходит зарядка конденсатора C22 через резистор R25. В интервале времени от начала зарядки до достижения напряжением на конденсаторе значения, заданного делителем напряжения R27R28, питание обмотки двигателя отключено, что препятствует быстрым флюктуациям тока около образцового значения.
Этот алгоритм в классическом смысле не относится к алгоритмам стабилизации тока “Fixed-Frequency PWM” или “Fixed-Off-Time PWM”, однако на практике он показал хорошую работоспособность. При превышении током образцового значения на выходе компаратора DA3.2 установлен низкий логический уровень. Микроконтроллер реагирует на это отключением обмотки одновременным закрыванием транзисторов VT1-VT4 с помощью сигнала SD, подаваемого на драйверы DA5 и DA6. Этим достигается быстрый спад тока в обмотках двигателя. В случае спада тока ниже образцового происходит обратное, на драйверы DA5 и DA6 поступает сигнал SD высокого уровня, открывающий упомянутые транзисторы, что не препятствует нарастанию тока в обмотке.
Этим достигается быстрый спад тока в обмотках двигателя. В случае спада тока ниже образцового происходит обратное, на драйверы DA5 и DA6 поступает сигнал SD высокого уровня, открывающий упомянутые транзисторы, что не препятствует нарастанию тока в обмотке.
Смена ступеней образцового напряжения, а также смена комбинаций открытых и закрытых транзисторов моста происходит с приходом очередного импульса на вход «Шаг» по алгоритмам, зависящим от предустановленного коэффициента деления шага (наличия перемычек между контактами 1-2 и 3-4 разъёма XP1) и текущего направления вращения (логического уровня сигнала на входе «Напр.»). Вход «Разр.» был задуман для разрешения и запрета работы двигателя, но в прилагаемой к статье версии программы он не действует.
Драйвер выполнен на двухсторонней печатной плате, чертёж печатных проводников которой изображён на рис. 2, а расположение элементов — на рис. 3. Транзисторы VT1-VT8 расположены с одной стороны платы теплоотводящими поверхностями от неё. К этим поверхностям прижат через изоляционные прокладки теплоотвод — в простейшем случае алюминиевая пластина размерами 60х60 мм. Следует заметить, что при токе фаз более 4…5 А и длительном режиме работы теплоотвода в виде пластины может оказаться недостаточно и его поверхность следует увеличить, сделав теплоотвод ребристым или игольчатым.
К этим поверхностям прижат через изоляционные прокладки теплоотвод — в простейшем случае алюминиевая пластина размерами 60х60 мм. Следует заметить, что при токе фаз более 4…5 А и длительном режиме работы теплоотвода в виде пластины может оказаться недостаточно и его поверхность следует увеличить, сделав теплоотвод ребристым или игольчатым.
Рис. 2. Чертёж печатных проводников
Рис. 3. Расположение элементов на плате
Материал платы следует выбрать толщиной не менее 1 …1,5 мм, толщина фольги — не менее 35 мкм. Печатные проводники, по которым течёт большой ток, следует обильно залудить или бандажировать медной проволокой, припаяв её по всей длине проводника.
Большая часть компонентов конструкции применена в оформлении для поверхностного монтажа. Резисторы и конденсаторы — типоразмера 1206. Резисторы R45, R50 имеют проволочные выводы и мощность — не менее 2 Вт. оксидные конденсаторы в цепях питания — с малым ESR. Подстроечные резисторы R18 и R19 — многооборотные 3296W.
Амплитудные значения тока фаз двигателя регулируют подстроечными резисторами R18, R19. Проще всего это делать, переведя драйвер в режим микрошага 1/8 и контролируя цифровым вольтметром падение напряжения на резисторах-датчикахтока R45 и R50. Подавая на вход «Шаг» одиночные импульсы, добиваются максимальных значений тока поочерёдно в фазах А и В. Подстроечными резисторами устанавливают эти значения одинаковыми и соответствующими требуемой амплитуде тока. Уменьшение сопротивления под-строечных резисторов приводит к снижению тока, и наоборот. Для ориентировки можно воспользоваться табл. 1, в которой приведена зависимость амплитуды тока фазы Imф от введённого сопротивления подстроечного резистора.
Таблица 1
Imф, A | 0,25 | 0,5 | 1,0 | 2,0 | 3,0 | 4,0 | 5,0 | 6,0 | 6.5 |
R18, R19, кОм | 0,31 | 0,62 | 1,27 | 2,62 | 4,07 | 5,62 | 7,29 | 9,09 | 10,04 |
Перед включением драйвера следует установить перемычки между контактами 1-2 и контактами 3-4 разъёма XP1, обеспечивающие нужный коэффициент деления шага двигателя в соответствии с табл.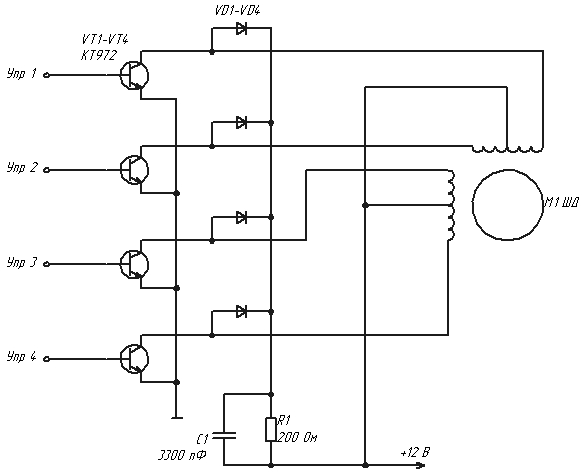 2. Программа анализирует состояние перемычек однократно в начале своей работы, дальнейшее изменение их состояния никакого влияния на работу драйвера не оказывает. Переключение коэффициента деления «на ходу» в предлагаемой версии программы не предусмотрено.
2. Программа анализирует состояние перемычек однократно в начале своей работы, дальнейшее изменение их состояния никакого влияния на работу драйвера не оказывает. Переключение коэффициента деления «на ходу» в предлагаемой версии программы не предусмотрено.
Таблица 2
Перемычки на ХР1 | Коэффициент деления шага | |
1-2 | 3-4 | |
Есть | Есть | 1/1 |
Нет | Есть | 1/2 |
Есть | Нет | 1/4 |
Нет | Нет | 1/8 |
Программу микроконтроллера и файл печатной платы в формате Sprint Layout 6.0 можно скачать здесь.
Автор: М. Резников, г. Волчанск, Украина
Драйвер шагового двигателя одноканальный Leadshine
Особенности драйвера:
- Технология самотестирования и автоматической настройки параметров обеспечивает оптимальную реакцию при работе с разными двигателями
- 16 ступеней деления шага, от 1:2 до 1:128, устанавливаемых с помощью DIP переключателей
- Возможность выбора тока удержания (половинный или полный) вала двигателя
- Оптоизолированные входа, высокая помехоустойчивость
- Защита от перенапряжения, низкого питающего напряжения и перегрузки по току
- Малый размер 118 * 85 * 34 мм
- Подходит для шаговых двигателей типа NEMA14-34
Настройка микрошага
|
PU/Rev
|
По умолчанию
|
400
|
800
|
1600
|
3200
|
6400
|
12800
|
25600
|
1000
|
2000
|
4000
|
5000
|
8000
|
10000
|
20000
|
25000
|
|
SW8
|
ON
|
ON
|
ON
|
ON
|
ON
|
ON
|
ON
|
ON
|
OFF
|
OFF
|
OFF
|
OFF
|
OFF
|
OFF
|
OFF
|
OFF
|
|
SW7
|
ON
|
ON
|
ON
|
ON
|
OFF
|
OFF
|
OFF
|
OFF
|
ON
|
ON
|
ON
|
ON
|
OFF
|
OFF
|
OFF
|
OFF
|
|
SW6
|
ON
|
ON
|
OFF
|
OFF
|
ON
|
ON
|
OFF
|
OFF
|
ON
|
ON
|
OFF
|
OFF
|
ON
|
ON
|
OFF
|
OFF
|
|
SW5
|
ON
|
OFF
|
ON
|
OFF
|
ON
|
OFF
|
ON
|
OFF
|
ON
|
OFF
|
ON
|
OFF
|
ON
|
OFF
|
ON
|
OFF
|
Настройка выходного тока
|
Рабочий (RMS), А
|
По умолчанию
|
1.
|
1.9
|
2.3
|
2.7
|
3.1
|
3.5
|
4.0
|
|
Пиковый, А
|
2.1
|
2.7
|
3.2
|
3.8
|
4.3
|
4.9
|
5.6
| |
|
SW3
|
OFF
|
OFF
|
OFF
|
OFF
|
ON
|
ON
|
ON
|
ON
|
|
SW2
|
OFF
|
OFF
|
ON
|
ON
|
OFF
|
OFF
|
ON
|
ON
|
|
SW1
|
OFF
|
ON
|
OFF
|
ON
|
OFF
|
ON
|
OFF
|
ON
|
 5
5SW4: OFF=Половинный ток
SW4: ON=Полный ток
Назначение контактов и индикации
|
Символ
|
Функция
|
Технические характеристики
|
|
PWR
|
Индикатор питания
|
При включении загорается зеленый индикатор.
|
|
ALARM
|
Индикатор неисправности
|
При перегрузке по току, повышенном напряжении и неисправности обмоток двигателя загорается красный индикатор.
|
|
DIR-
|
Сигнал направления, либо импульсный сигнал
|
В одноимпульсном (PUL/DIR) режиме предоставляет возможность выбрать направление вращения вала двигателя, в двухимпульсном (CW/CCW) (настраивается программно), при подаче на него управляющих сигналов, позволяет вращать вал двигателя против часовой стрелке (CCW).
Требуется: низкий уровень 0 ~ 0,5 В, высокий уровень 4 ~ 5 В, при использовании управляющего напряжения выше 5В, необходимо использовать токоограничивающие резисторы (так же касается сигналов PULSE и ENABLE
|
|
DIR+
| ||
|
PUL-
|
Импульсный сигнал
|
В одноимпульсном режиме (PUL/DIR) по переднему и заднему (настраивается программно) прямоугольного импульса управляющий драйвер переместит вал двигателя, в зависимости от выбранного микрошага, на одну дискрету в направлении, установленным сигналом DIR, в двухимпульсном (CW/CCW) вал будет вращаться только по часовой стрелке (CW).
Требуется: низкий уровень 0 ~ 0,5 В, высокий уровень 4 ~ 5 В.
Для надежного отклика ширина импульса должно быть больше 7.5 мкс
|
|
PUL+
| ||
|
ENA-
|
Сигнал разрешения работы
|
Сигнал используется для запрета и разрешения работы привода. При подаче сигнала выдается запрет на работу. При отсутствии сигнала работа привода разрешена.
|
|
ENA+
| ||
|
VDC
|
Электропитание
|
VDC 24~45 В
|
|
GND
| ||
|
+A, -A
|
Подключение обмоток двигателя
| |
|
+B, -B
| ||
Примечание:
- Источник питания не должно превышать VDС 45В
- Уровень входного управляющего сигнала составляет 5 В, если используется питание выше 5В, то необходимо использовать токоограничивающий резистор.

- При перегрузке по току, повышенном или пониженном напряжении индикатор ALARM мигает, проверьте правильность схемы подключения, поданных напряжений и перезапустите питание.
- Зеленый индикатор PWR загорается, когда привод включен.
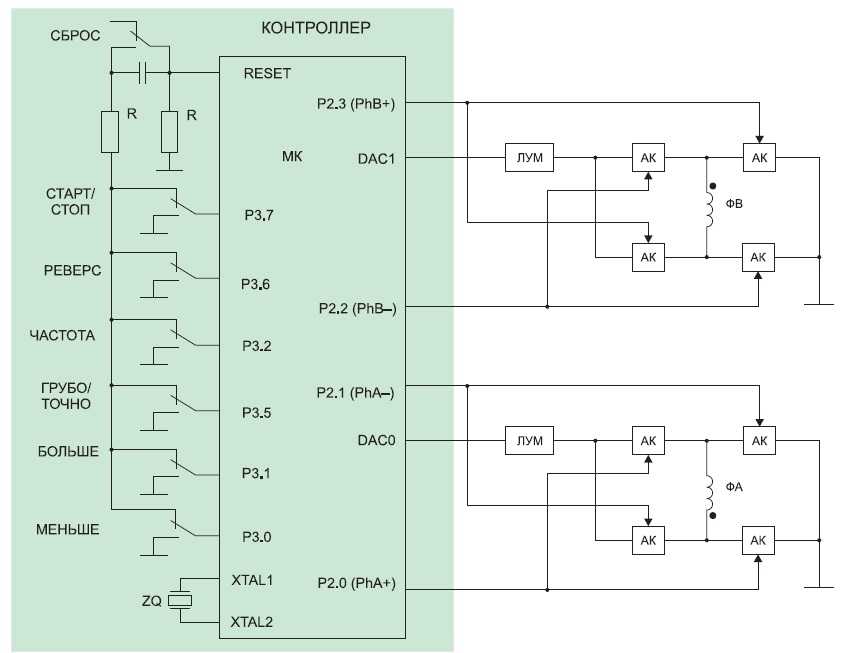
Контроллер шагового двигатателя для выставочного стенда
Контроллер шагового двигатателя — это то без чего не возможно заставить шаговый двигатель вращаться, в отличие от обычных щеточных двигателей постоянного тока управления ШД происходит немного по иному принципу.
Возьмем определение шагового двигателя из старой доброй Википедии:
Самые распространенные шаговые двигатели в своих исполнениях
Шаговый электродвигатель — синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора. Ключевое действие здесь — это именно последовательная активация обмоток. Осуществление перемещения вала осуществляется за счет пошагового переключения обмоток и полярности которая на них подается что можно рассмотреть из анимации ниже.
Осуществление перемещения вала осуществляется за счет пошагового переключения обмоток и полярности которая на них подается что можно рассмотреть из анимации ниже.
Наглядный пример переключения катушек ШД
В свою очередь шаговые двигателя делаться на два основных вида это биполярные и униполярные. Различие которых заключается в наличии средних отводов у катушек биполярных двигателей — что сразу автоматически делает их униполярными. Также униполярные ШД имеют большую вариацию по методам соединения катушек, провода катушек иногда могут быть соединены или разъедены в зависимости от топологии модели двигателя.
Основные различия между катушками ШД(униполярных и биполярных двигателей)
Для более глубокого понимая оставлю картинку с различными топологиями разнесения выводов катушек у униполярных и биполярных шаговых двигателей.
Топологии отведения проводов у униполярных и биполярных ШД
С шаговыми двигателями мы разобрались, теперь перейдет к методам их управления, контроллерам и драйверам.
Контроллер это собственно то — что задает скорость и направления движения шаговых двигателей, в то время как драйвер является уже непосредственным устройством которое преобразует слаботочные сигналы с контроллера в понятные для шагового двигателя силовые переключения обмоток. Как правило, тополгия драйверов выполнена на полевых транзисторах, на английском называемыми FET или MOSFET. Почему используют в основном полевые транзисторы? На это есть несколько причин, первая это их низкое удельное сопротивления перехода сток\исток — в отличие от довольно высокого у биполярных транзисторов коллектор\эммитер. Их низка цена при сравнительно схожих переходных параметрах по сравнению с биполярными транзисторами.
Полевыми транзисторами можно управлять как напрямую, так и через специализированные драйверы. Драйверы позволяют использовать транзисторы в наиболее эффективном режиме, фронты нарастания и спадания управления затвором\базой минимальны. Также часто драйверы имеют встроенные насос для генерации высокого напряжения, что позволяет использовать N-канальные мосфеты не только для переключения негативной нагрузки, но и позитивной.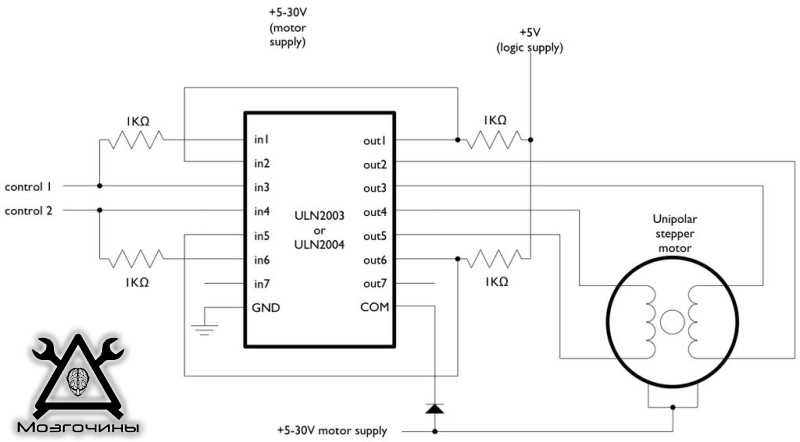
В моем ТЗ стояло, разработать контроллер, который бы просто гонял шаговый двигатель то в одну, то в обратную сторону на одинаковое количество шагов. Должна обязательно была присутствовать возможность регулировки скорости переключения обмоток(speed) а так же возможность задавать количество оборотов до того момента пока он не начнет движения в обратную сторону, назовем это travel distance.
Для управления был выбран привычный мне уже в работе ATMEGA48 который можно спустя годы до сих пор купить практически в любом магазине за сущие копейки. Кстати документации к данной модели МК в интернете просто уйма — что-то же является жирным плюсом.
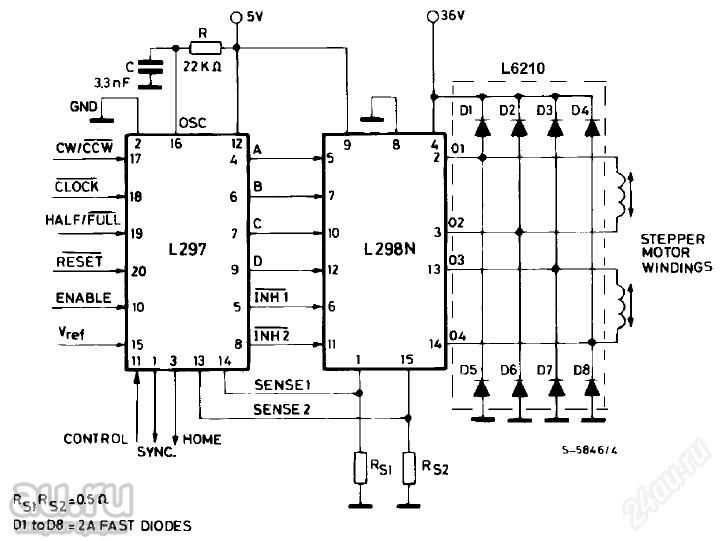
В качество драйвера было решено использоваться связку:
- драйвер ШД L297
- драйвера транзисторов IR2104S
- мосфеты IRFZ44
Контроллер шагового двигатателя для выставочного стенда — схема на базе atmega48, l297 и irfz44
Печатная плата в DipTrace контроллера управления ШД для выставочного стенда
После разработки контроллера, были сгенерированы файлы gerber и файл сверловки печатной платы — это, как правило, все что нужно что бы заказать печатную плату на одной из любых компаний которая занимается производством печатных плат. Ниже оставлю для вас исходные файлы как печатной платы так и исходного кода, которые доступны для загрузки — ищите их в конце статьи.
Ниже оставлю для вас исходные файлы как печатной платы так и исходного кода, которые доступны для загрузки — ищите их в конце статьи.
Платы приехали, и я приступил к запайке одной из них как требовалось изготовить всего один образец для будущей выставки. Помимо печатной платы были заказаны радиокомпоненты, корпус и трансформатор.
Контроллер управления ШД для выставочного стенда в сборе
После сборки начался этап написания ПО и обкатки. Данная процедура не заняла много времени так как ранее уже был приобретённый опыт в работе как с данным МК, его АЦП и таймерами, так и в работе с шаговыми двигателями.
Контроллер управления ШД для выставочного стенда — тестированиеПосле окончания работ, контроллер шагового двигатателя для выставочного стенда был отправлен заказчику, если мне не изменяет помять проблем с подключением и настройками вроде не возникало, через пару дней после начала выставки мне даже отправили видео работы которое вы тоже теперь можете посмотреть ниже.
Печатная плата в DipTrace и исходный код для прошивки:
step_motor_controller_pcb_diptraceСкачать
step_motor_controller_pcb_source_codeСкачать
Смотрите также другие наши работы в разделе — МАСТЕРСКАЯ, где можете найти возможно, что-то еще интересное для вас. Есть у нас небольшой и скромный канал YOUTUBE — будем также рады если вы его посетите и поддержите нас лайками и подписками.
Драйверы шаговых двигателей
: пошаговое руководство | Передовой промышленный стандарт
18 декабря 2018 г. | Блог | 1 комментарий
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — это схема драйвера, которая позволяет шаговому двигателю работать так, как он работает. Например, шаговые двигатели требуют достаточной и контролируемой энергии для фаз в точной последовательности. В связи с этим шаговые двигатели считаются более совершенными, чем типичный двигатель постоянного тока.
Например, шаговые двигатели требуют достаточной и контролируемой энергии для фаз в точной последовательности. В связи с этим шаговые двигатели считаются более совершенными, чем типичный двигатель постоянного тока.
Несмотря на то, что система может показаться сверхсложной, ее можно построить с помощью нескольких транзисторов. Организовав их функции включения и выключения надлежащим образом, система способна обеспечить достаточную мощность фаз, а двигатель может выполнять этот процесс поэтапно. Униполярный драйвер можно сделать в рамках приличного бюджета. Важно помнить, что этот драйвер сможет питать только униполярные двигатели. Если вы хотите подключить биполярный двигатель, вам понадобятся два полных моста. Это позволяет системе возвращать ток на ступени. Их изготовление может оказаться более сложным, но вы можете приобрести чипы H-bridge, чтобы упростить процесс.
Как работают драйверы шаговых двигателей?
Драйверы шаговых двигателей полагаются на входные данные из отдельного источника для функционирования и создания выходных данных.
Следующие четыре сигнала управляют двигателем:
- ЧАСЫ: Тактовый сигнал дает команду шага.
- СБРОС: Устанавливает сигналы конечного уровня в заданное начальное положение.
- НАПРАВЛЕНИЕ: Определяет направление вращения оси двигателя.
- ПОЛУШАГ/ПОЛНЫЙ: Определяет, работать ли в полном или полушаге.
Дешевый способ питания простого шагового двигателя — через микроконтроллер. Этого достаточно, поскольку этим драйверам для работы требуется всего пара сигналов. Первый сигнал шага, а второй сигнал направления. Последний, при высоком логическом уровне +5 В, сообщает двигателю направление работы. Когда сигнал низкий (GND), он движется в противоположном направлении.
Для полного шага обычно требуется два прямоугольных сигнала в квадратуре . В зависимости от ведущей фазы ось двигателя будет вращаться либо по часовой стрелке, либо против часовой стрелки. Вращение пропорционально тактовой частоте, которая управляет импульсом на линии. Это GND и +5V, о которых упоминалось ранее. Таким образом, в зависимости от DIP-переключателей настройки разрешения шага, двигатель будет переходить от одного положения шага к другому. Например, если он установлен в полношаговый режим, будет сделан полный шаг, и половина полного шага, если двигатель установлен в полушаговый режим, и четверть шага для четвертьшага и так далее.
Это GND и +5V, о которых упоминалось ранее. Таким образом, в зависимости от DIP-переключателей настройки разрешения шага, двигатель будет переходить от одного положения шага к другому. Например, если он установлен в полношаговый режим, будет сделан полный шаг, и половина полного шага, если двигатель установлен в полушаговый режим, и четверть шага для четвертьшага и так далее.
Из-за инерции вы должны увеличивать и уменьшать импульсы, чтобы синхронизироваться с магнитным полем. В противном случае двигатель может заглохнуть. Рампа также должна быть плавной и практически не двигаться, чтобы двигатель не заглох.
Как соединить драйверы с двигателями?
Крайне важно, чтобы драйвер соответствовал правильному двигателю . Если все сделано неправильно, производительность двигателя будет недостаточной, или он может даже повредить одну часть или обе.
При поиске подходящих двигателей и драйверов обязательно учитывайте ограничения по напряжению и максимальный ток, который может обеспечить драйвер. Обязательно учитывайте «непрерывный» номинальный ток, а не «пиковый» номинальный ток, поскольку они не применимы к шаговым двигателям. Что касается двигателя, убедитесь, что он может принимать ампер на фазу и сопротивление на фазу, которые обеспечивает драйвер. Кроме того, номинальный постоянный ток драйвера должен быть больше, чем номинальный ток двигателя.
Обязательно учитывайте «непрерывный» номинальный ток, а не «пиковый» номинальный ток, поскольку они не применимы к шаговым двигателям. Что касается двигателя, убедитесь, что он может принимать ампер на фазу и сопротивление на фазу, которые обеспечивает драйвер. Кроме того, номинальный постоянный ток драйвера должен быть больше, чем номинальный ток двигателя.
Часто указывается напряжение, но не всегда. Вы можете использовать закон Ома , чтобы рассчитать его и убедиться, что ваш процесс дает продуктивные результаты. Умножьте это на 20, чтобы получить максимальное рабочее напряжение драйвера двигателя. Если напряжение катушки не указано, квадратный корень из индуктивности двигателя (мГн) можно умножить на 32, чтобы получить напряжение питания.
Это показано ниже.
Например, если в технических характеристиках двигателя указано, что номинальное напряжение составляет 3 В (3 В * 20 = 60 В), можно безопасно управлять двигателем с драйвером с максимальным рабочим напряжением 60 В.
Пример 2, если в характеристиках двигателя указано, что фазный ток и сопротивление составляют 5 А и 0,6 Ом, (5 А * 0,6 Ом = 3 В * 20 = 60 В).
Пример 3, если в характеристиках двигателя указано, что индуктивность/фаза составляет 2,5 мГн ((√2,5) * 32 = 50,6 В), можно безопасно использовать двигатель с рабочим драйвером на 50 В. Внедрение значения индуктивности фаз дает консервативное номинальное напряжение, так как это очень точный расчет максимального напряжения питания .
Управление шаговым двигателем не должно быть сложным
Хотя процесс настройки шагового двигателя может показаться сложным, при наличии терпения и правильного руководства процесс может быть довольно простым. Использование микроконтроллера — эффективный способ управления двигателем, поскольку для работы драйверу требуется всего несколько сигналов. Сопряжение двигателей с драйверами также может быть простым. Установив номинальный постоянный ток, ампер на фазу и используя закон Ома для расчета напряжения, вы можете успешно соединить двигатель и драйвер.
Подключив драйвер к шаговому двигателю, вы сможете подавать ток на двигатель, чтобы убедиться, что он работает так, как вы хотите. Установив эту точность, вы теперь можете выполнять проекты, требующие строгого контроля скорости и точности.
Источники: https://learn.adafruit.com/all-about-stepper-motors/driving-a-stepper
|
|
Драйвер шагового двигателя
В настоящее время шаговые двигатели широко используются в электронике. 1. Двигатели биполярные. Они имеют две катушки и управляются путем изменения направления тока, протекающего через катушки в правильной последовательности. Эти двигатели имеют только четыре провода и не могут быть подключены к этому комплекту. См. наш комплект 1406 для комплекта драйвера биполярного шагового двигателя. 2. Униполярные двигатели. У них есть две катушки с центральным отводом, которые рассматриваются как четыре катушки. Эти двигатели могут иметь пять, шесть или восемь проводов. Пятипроводные двигатели имеют два центральных отвода, объединенных внутри и выведенных одним проводом (рис. 1). Шестипроводные двигатели выводят каждый центральный кран отдельно. Два центральных ответвления необходимо соединить снаружи (рис. 2). Восьмипроводные двигатели выводят оба конца каждой катушки. Четыре центральных ответвления соединены снаружи в один провод. В каждом случае центральный отвод (отводы) подключается к положительному источнику питания двигателя. Шаговый двигатель не имеет щеток и контактов. По сути, это синхронный двигатель с электронным переключением магнитного поля для вращения магнита якоря. Интернет — это место, где можно получить все разъяснения о степперах. Просто погуглите шаговый двигатель, и вы найдете десятки сайтов. В частности, поищите статью «Джонс о шаговых двигателях» (она стоит в начале списка, когда я только что это делал) и прочтите ее. Если вы посмотрите на другие референсы, вы обнаружите, что схема в этом наборе существует уже много лет в различных формах. Последняя публикация была в Silicon Chip, 5/2002, и я взял за основу эту схему. |
 Униполярные двигатели можно подключать как биполярные, не используя плюсовые провода.
Униполярные двигатели можно подключать как биполярные, не используя плюсовые провода.Драйвер шагового двигателя Описание
Этот контроллер работает как в автономном режиме, так и в режиме управления с ПК. IC3:C и D (элементы исключающего ИЛИ 4030 или 4070) инвертируют выходы, доступные на выходах Q и /Q каждого из триггеров (FF) IC4:A и IC4:B. Входящие ступенчатые импульсы тактируют FF, таким образом переключая выходы Q и /Q, и это последовательно включает и выключает полевые МОП-транзисторы. IRFZ44 имеют низкое сопротивление во включенном состоянии и могут выдавать до 6 А каждый без радиатора. Питание шагового двигателя подключается к клеммам V+ и GND, как показано на накладке. Для питания микросхем 78L05 предусмотрен отдельный источник питания KITV. 9V 12VDC будет достаточно. Резисторы R2/C2 образуют фильтр нижних частот для фильтрации быстро нарастающих переходных процессов переключения двигателя. Обратите внимание, что в некоторых текстах по шаговым двигателям говорится об использовании 4070 вместо 4030. Мы не выяснили, почему это так. Конечно, наше тестирование с 4030s не выявило никаких проблем. Я хотел бы услышать от любого, кто знает, почему этот совет иногда дается. В режиме компьютерного управления используйте три контакта с контактами DIR, STEP и GND. Переключите переключатель SPDT в положение EXTernal. Направление SPDT не влияет на внешний режим. |

Типы шаговых двигателей
(рис. (рис. 2). Восьмипроводные двигатели выводят оба конца каждой катушки. Четыре центральных ответвления соединены снаружи в один провод. В каждом случае центральный отвод (отводы) подключается к положительному источнику питания двигателя. В |
 1). Шестипроводные двигатели выводят каждый центральный кран отдельно. Два центральных отвода необходимо соединить снаружи
1). Шестипроводные двигатели выводят каждый центральный кран отдельно. Два центральных отвода необходимо соединить снаружиСборка
Обратите внимание, что после дальнейшего тестирования мы изменили значения потенциометра и резистора R1 по сравнению с показанными на наложении платы. |
Подключение шагового двигателя
Всегда интересно правильно подключить двигатель. Обычно у двигателя есть некоторая индикация того, какие провода какие. Если нет, то используйте мультиметр для измерения сопротивления между парами проводов и определения разводки. Подсоедините провода к клеммной колодке. |
 Подайте питание. Убедитесь, что переключатель SPDT установлен в положение INTernal. Посмотрите, крутится ли мотор. Если нет, то поменяйте местами только провода M1B и M2B и проверьте еще раз. Теперь он должен вращаться. VR1 будет изменять скорость шага.
Подайте питание. Убедитесь, что переключатель SPDT установлен в положение INTernal. Посмотрите, крутится ли мотор. Если нет, то поменяйте местами только провода M1B и M2B и проверьте еще раз. Теперь он должен вращаться. VR1 будет изменять скорость шага.Программное обеспечение контроллера шагового двигателя
| |||||
|
|
 Этот LC-метр позволяет измерять невероятно малые индуктивности, что делает его идеальным инструментом для изготовления всех типов ВЧ-катушек и катушек индуктивности. LC Meter может измерять индуктивность от 10 нГн до 1000 нГн, 1 мкГн — 1000 мкГн, 1 мГн — 100 мГн и емкости от 0,1 пФ до 900 нФ. Схема включает автоматический выбор диапазона, а также переключатель сброса и обеспечивает очень точные и стабильные показания.
Этот LC-метр позволяет измерять невероятно малые индуктивности, что делает его идеальным инструментом для изготовления всех типов ВЧ-катушек и катушек индуктивности. LC Meter может измерять индуктивность от 10 нГн до 1000 нГн, 1 мкГн — 1000 мкГн, 1 мГн — 100 мГн и емкости от 0,1 пФ до 900 нФ. Схема включает автоматический выбор диапазона, а также переключатель сброса и обеспечивает очень точные и стабильные показания.
|
|
 Это очень полезное стендовое испытательное оборудование для тестирования и определения частоты различных устройств с неизвестной частотой, таких как генераторы, радиоприемники, передатчики, функциональные генераторы, кристаллы и т. д.
Это очень полезное стендовое испытательное оборудование для тестирования и определения частоты различных устройств с неизвестной частотой, таких как генераторы, радиоприемники, передатчики, функциональные генераторы, кристаллы и т. д.
|
|
 Его можно подключить к любому источнику стереозвука, такому как iPod, компьютер, ноутбук, CD-плеер, Walkman, телевизор, спутниковый ресивер, кассетная дека или другая стереосистема для передачи стереозвука с превосходной четкостью по всему дому, офису, двору или лагерная площадка.
Его можно подключить к любому источнику стереозвука, такому как iPod, компьютер, ноутбук, CD-плеер, Walkman, телевизор, спутниковый ресивер, кассетная дека или другая стереосистема для передачи стереозвука с превосходной четкостью по всему дому, офису, двору или лагерная площадка.
|
|
 Он также анализирует характеристики транзистора, такие как напряжение и коэффициент усиления. Это незаменимый инструмент для устранения неполадок и ремонта электронного оборудования путем определения работоспособности и исправности электролитических конденсаторов. В отличие от других измерителей ESR, которые измеряют только значение ESR, этот измеряет значение ESR конденсатора, а также его емкость одновременно.
Он также анализирует характеристики транзистора, такие как напряжение и коэффициент усиления. Это незаменимый инструмент для устранения неполадок и ремонта электронного оборудования путем определения работоспособности и исправности электролитических конденсаторов. В отличие от других измерителей ESR, которые измеряют только значение ESR, этот измеряет значение ESR конденсатора, а также его емкость одновременно. Д. Усилитель для наушников достаточно мал, чтобы поместиться в жестяную коробку Altoids, и благодаря низкому энергопотреблению может питаться от одного 9батарея В.
Д. Усилитель для наушников достаточно мал, чтобы поместиться в жестяную коробку Altoids, и благодаря низкому энергопотреблению может питаться от одного 9батарея В.
|
|
 Плата оснащена 28-контактным разъемом DIP IC, заменяемым пользователем микроконтроллером ATmega328, прошитым загрузчиком Arduino, кварцевым резонатором 16 МГц и переключателем сброса. Он имеет 14 цифровых входов/выходов (0-13), 6 из которых могут использоваться как выходы ШИМ и 6 аналоговых входов (A0-A5). Скетчи Arduino загружаются через любой адаптер USB-Serial, подключенный к разъему 6-PIN ICSP female. Плата питается напряжением 2-5 В и может питаться от батареи, такой как литий-ионный элемент, два элемента AA, внешний источник питания или адаптер питания USB.
Плата оснащена 28-контактным разъемом DIP IC, заменяемым пользователем микроконтроллером ATmega328, прошитым загрузчиком Arduino, кварцевым резонатором 16 МГц и переключателем сброса. Он имеет 14 цифровых входов/выходов (0-13), 6 из которых могут использоваться как выходы ШИМ и 6 аналоговых входов (A0-A5). Скетчи Arduino загружаются через любой адаптер USB-Serial, подключенный к разъему 6-PIN ICSP female. Плата питается напряжением 2-5 В и может питаться от батареи, такой как литий-ионный элемент, два элемента AA, внешний источник питания или адаптер питания USB. Вы можете управлять освещением, вентиляторами, системой кондиционирования, компьютером, принтером, усилителем, роботами, гаражными воротами, системами безопасности, моторизованными шторами, моторизованными оконными жалюзи, дверными замками, разбрызгивателями, моторизованными проекционными экранами и всем остальным, о чем вы только можете подумать.
Вы можете управлять освещением, вентиляторами, системой кондиционирования, компьютером, принтером, усилителем, роботами, гаражными воротами, системами безопасности, моторизованными шторами, моторизованными оконными жалюзи, дверными замками, разбрызгивателями, моторизованными проекционными экранами и всем остальным, о чем вы только можете подумать.Активная регулировка усиления l Качественный шаговый двигатель l Драйвер шагового двигателя Toshiba | Toshiba Electronic Devices & Storage Corporation
Toshiba предлагает обширную линейку драйверов шаговых двигателей, изготовленных с использованием процесса BiCD, который обеспечивает высокую точность и возможность работы с большими токами. Драйверы шаговых двигателей Toshiba доступны в биполярной и униполярной конфигурациях.
*1 TB67S105 и TB67S145 не поддерживают микрошаг.
Драйверы шаговых двигателей Линейка продуктов
Поиск перекрестных ссылок
Поиск по перекрестным ссылкам
ContainsBegins WithExact
требуется 3 символа или более.
Информация, представленная в этом перекрестном справочнике
Информация, представленная в этом перекрестном справочнике, основана на критериях выбора TOSHIBA и должна рассматриваться только как рекомендация. Внимательно ознакомьтесь с последними версиями всей соответствующей информации о продуктах TOSHIBA, включая, помимо прочего, технические описания, и проверьте все рабочие параметры продуктов TOSHIBA, чтобы убедиться, что предлагаемые продукты TOSHIBA действительно совместимы с вашей конструкцией и приложением.
Обратите внимание, что эта перекрестная ссылка основана на оценке TOSHIBA совместимости с продуктами других производителей на основе опубликованных данных других производителей на момент сбора данных.
TOSHIBA не несет ответственности за неверную или неполную информацию. Информация может быть изменена в любое время без предварительного уведомления.
Видео о технологии
Видео о продукте
Оригинальные технологии Toshiba
Особенности драйверов шаговых двигателей Toshiba
Технология обнаружения аномалий
Он имеет встроенные схемы для обнаружения аномалий, таких как низкое напряжение (UVLO), перегрузка по току (ISD) и перегрев (TSD).
Это позволяет построить высоконадежную систему. (Примечание: встроенная функция обнаружения ошибок различается в зависимости от продукта.)。
Toshiba предлагает различные драйверы шаговых двигателей, обеспечивающие существенные преимущества AGC. Доступны драйверы шаговых двигателей как с тактовым входом, так и с фазовым входом. Если вы хотите оценить свой план или конструкцию продукта с использованием шагового двигателя с технологией AGC, эталонные конструкции доступны для загрузки.
ИС драйвера постоянного тока и шагового двигателя
Этот базовый проект содержит принципиальную схему, спецификацию и данные печатной платы (данные Gerber) и т. д. оценочной платы для ИС драйвера постоянного тока и шагового двигателя.
Драйвер коллекторного двигателя постоянного тока/управление шаговым двигателем
Подробности
Синхронное управление/драйвер шагового двигателя 2-фазного биполярного типа
Этот базовый проект содержит принципиальную схему, данные спецификации и печатной платы (данные Gerber) и т.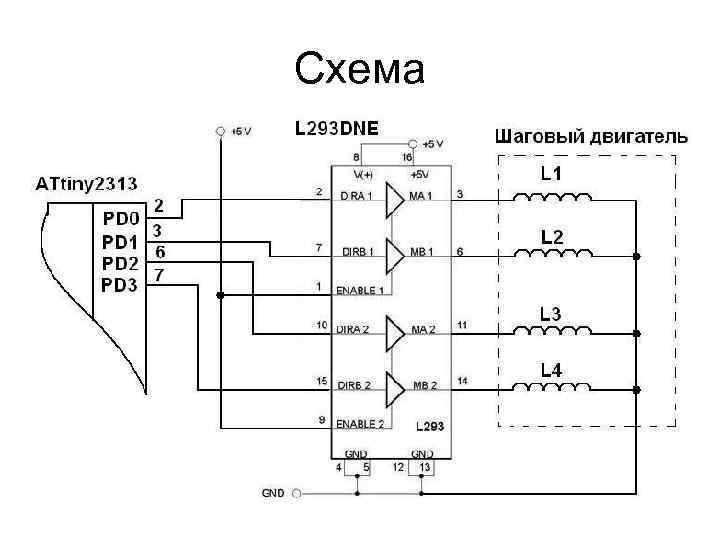 д. оценочной платы для синхронного управления/2-фазного биполярного шагового двигателя ИС драйвера.
д. оценочной платы для синхронного управления/2-фазного биполярного шагового двигателя ИС драйвера.
Управление шаговым двигателем
Подробности
ИС драйвера многоканального шагового двигателя
Этот базовый проект содержит принципиальную схему, данные спецификации и печатной платы (данные Gerber) и т. д. оценочной платы для ИС драйвера многоканального шагового двигателя.
Управление шаговым двигателем
Подробности
ИС драйвера 2-фазного униполярного шагового двигателя
Этот базовый проект содержит принципиальную схему, данные спецификации и печатной платы (данные Gerber) и т. д. оценочной платы для ИС драйвера 2-фазного униполярного шагового двигателя.
Управление шаговым двигателем
Подробности
ИС драйвера двухфазного биполярного шагового двигателя
Этот базовый проект содержит принципиальную схему, данные спецификации и печатной платы (данные Gerber) и т. д. оценочной платы для ИС драйвера двухфазного биполярного шагового двигателя.
д. оценочной платы для ИС драйвера двухфазного биполярного шагового двигателя.
Управление шаговым двигателем
Подробности
Фазные/последовательные входы Драйвер двухфазного шагового двигателя IC
Этот базовый проект содержит принципиальную схему, данные спецификации и печатной платы (данные Gerber) и т. д. оценочной платы для фазных/последовательных входов ИС драйвера двухфазного шагового двигателя.
Управление шаговым двигателем
Подробности
Загрузка моделей PSpice
®
Вопросы о покупке, отборе проб и надежности ИС
СодержитBegins WithExact
требуется 3 или более символов.
ключевое слово:
Щелкните по этой ссылке, чтобы просмотреть список запасных частей TOSHIBA, доступных у тех дистрибьюторов Toshiba America Electronic Components, Inc. («TAEC»), которые участвуют в базе данных поставщиков электронных компонентов netCOMPONENTS. Обратите внимание, что TAEC предоставляет эту ссылку исключительно для удобства. Все количества, указанные в инвентаре, могут быть изменены, и информация, представленная на этой странице, не гарантирует наличие продукта (ов), пожалуйста, уточните у дистрибьютора, прежде чем полагаться на указанные количества. Чтобы гарантировать доступность, вы должны разместить заказ у одного из дистрибьюторов Toshiba.
ИС драйвера шагового двигателя Toshiba, используемые для преобразования сигналов ввода-вывода от контроллера в движение двигателя для достижения точности позиционирования. Точное управление положением, достигаемое шаговыми двигателями, используется во многих приложениях.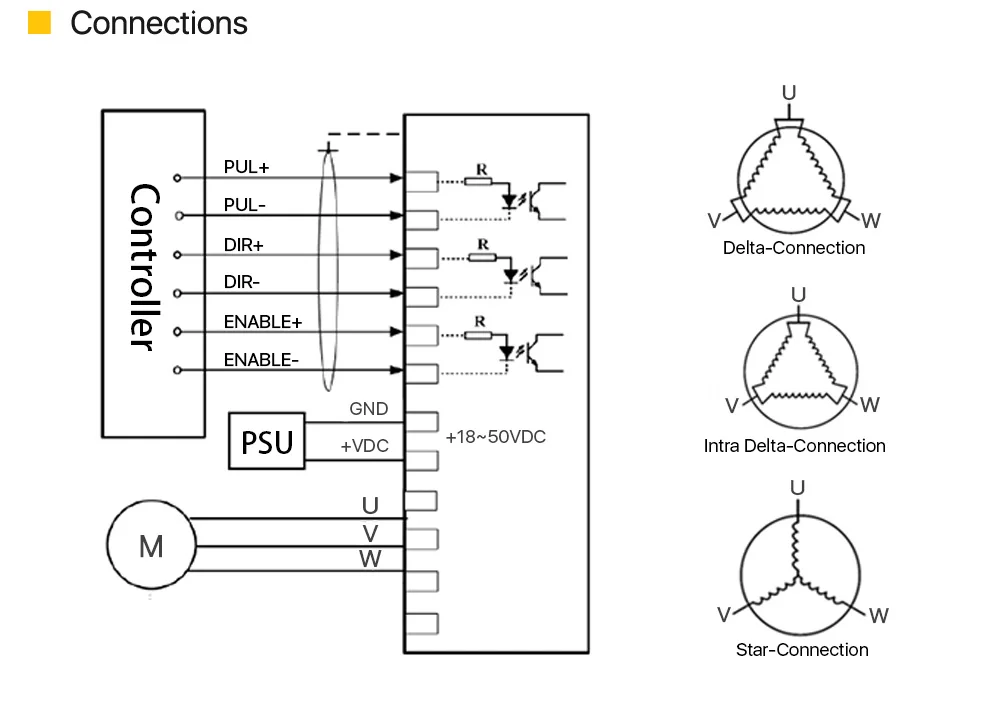 Но для того, чтобы двигатель не заглох, шаговые двигатели, как правило, требуют дополнительного тока. Поэтому многие инженеры и пользователи ищут оптимизированное управление шаговым двигателем. Toshiba разработала уникальную архитектуру под названием «Активная регулировка усиления», чтобы преодолеть эти требования, и внедрила ее в некоторые из последних продуктов. Схемы драйверов шаговых двигателей Toshiba изготавливаются с использованием процесса BiCD, чтобы обеспечить высокую точность и возможность использования больших токов. Доступен в биполярной и монополярной конфигурациях.
Но для того, чтобы двигатель не заглох, шаговые двигатели, как правило, требуют дополнительного тока. Поэтому многие инженеры и пользователи ищут оптимизированное управление шаговым двигателем. Toshiba разработала уникальную архитектуру под названием «Активная регулировка усиления», чтобы преодолеть эти требования, и внедрила ее в некоторые из последних продуктов. Схемы драйверов шаговых двигателей Toshiba изготавливаются с использованием процесса BiCD, чтобы обеспечить высокую точность и возможность использования больших токов. Доступен в биполярной и монополярной конфигурациях.
Pololu Высокопроизводительный двигатель шагового двигателя 36V4
Обзор
High-Power STEPPER. |
|---|
Мощный драйвер шагового двигателя Pololu 36v4, вид сверху. |
|---|
Высокомощный драйвер шагового двигателя Pololu 36v4 сочетает в себе микросхему драйвера шагового двигателя DRV8711 от Texas Instruments с внешними МОП-транзисторами, что позволяет управлять большими биполярными шаговыми двигателями при рабочем напряжении от 8 В до 50 В. DRV8711 имеет множество конфигурируемых настройки, поэтому см. техническое описание DRV8711 для подробного объяснения его функций и способов их использования (у нас также есть библиотека Arduino, которая упрощает начало работы, предоставляя основные функции для настройки и работы с драйвером).
DRV8711 имеет множество конфигурируемых настройки, поэтому см. техническое описание DRV8711 для подробного объяснения его функций и способов их использования (у нас также есть библиотека Arduino, которая упрощает начало работы, предоставляя основные функции для настройки и работы с драйвером).
Мощность драйвера зависит от внешних двойных Н-мостов, которые позволяют драйверу подавать непрерывный ток до 4 А на фазу без какого-либо дополнительного охлаждения, такого как радиаторы или принудительный поток воздуха. (При достаточном дополнительном охлаждении драйвер может поддерживать ток примерно до 6 А на фазу; дополнительные сведения, включая важную информацию о безопасном использовании этого продукта, см. в разделе «Рассеиваемая мощность » ниже.)
Основные характеристики
- Широкий диапазон рабочего напряжения от 8 В до 50 В
- Высокая мощность: может обеспечивать непрерывный ток до 4 А на фазу без дополнительного охлаждения (макс. 6 А при достаточном дополнительном охлаждении)
- Широкие возможности настройки через интерфейс SPI
- Дополнительные контакты управления STEP/DIR (степпингом также можно управлять только через интерфейс SPI)
- Девять различных шагов разрешения вплоть до 256 микрошагов: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага, 1/32 шага, 1/64 шага, 1/ 128 шагов и 1/256 шагов
- Регулируемое управление током позволяет установить максимальный выходной ток, что позволяет использовать напряжения выше номинального напряжения вашего шагового двигателя для достижения более высокой частоты шагов
- Адаптивное время гашения, регулируемое время затухания и различные режимы затухания тока позволяют создавать сверхплавные профили движения через интерфейс SPI
- Дополнительный выход STALL включает обнаружение остановки при микрошаге
- Дополнительный выход BEMF позволяет использовать более продвинутые алгоритмы управления и обнаружения останова на основе обратной ЭДС шагового двигателя
- Драйвер поддерживает альтернативный режим работы для управления двумя коллекторными двигателями постоянного тока с ШИМ-входами вместо одного биполярного шагового двигателя с входами STEP/DIR
- Входы, совместимые с логикой 1,8 В, 3,3 В и 5 В
- Все цифровые выходы имеют открытый сток с подтяжкой к внешнему напряжению IOREF для использования с системами, отличными от 5 В (IOREF можно подключить к соседнему контакту 5V OUT для использования с системами 5 В)
- Блокировка при пониженном напряжении, защита от перегрузки по току, защита от короткого замыкания и защита от обратного напряжения (до 40 В)
- Arduino и примеры эскизов, которые предоставляют основные функции для настройки и работы с драйвером
Доступны библиотека
.
В качестве альтернативы этому драйверу шагового двигателя, наш многоинтерфейсный USB-контроллер шагового двигателя Tic 36v4 высокой мощности имеет аналогичные характеристики мощности и предлагает высокоуровневые интерфейсы (USB, последовательный TTL, I²C, аналоговое напряжение, квадратурный энкодер и RC). сервоимпульсы для хобби), которые облегчают использование в некоторых приложениях. Программное обеспечение для настройки Tic позволяет изменять многие параметры драйвера через USB, устраняя необходимость прямого использования SPI для настройки DRV8711.
Обновление от 19 сентября 2019 г.: Сейчас мы поставляем небольшую версию (md38b) с улучшенной устойчивостью к шумам и отказам при высоких входных напряжениях и высоких ограничениях по току.
Включенное оборудование
Этот продукт поставляется со всеми установленными компонентами для поверхностного монтажа, как показано на рисунке продукта. Однако для сборки входящих в комплект деталей со сквозными отверстиями требуется пайка. В комплект входят следующие детали со сквозными отверстиями:
В комплект входят следующие детали со сквозными отверстиями:
- Два 1×12-контактных отрывных разъема 0,1″ вилки
- Три 2-контактных клеммных блока 3,5 мм (для питания платы и выходов двигателя)
- Одна перемычка 0,1″ (для дополнительного подключения IOREF к соседнему контакту V5 при использовании этого драйвера в 5-вольтовых системах)
Вилки диаметром 0,1″ можно сломать или разрезать на более мелкие части по желанию и впаять в меньшие сквозные отверстия. Эти разъемы совместимы с макетными платами без пайки, 0,1-дюймовыми розетками и нашими премиальными и предварительно обжатыми перемычками. Клеммные колодки могут быть впаяны в большие отверстия для удобного временного подключения неизолированных силовых проводов и проводов двигателя (см. наше короткое видео об установке клеммной колодки). Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате для наиболее компактной установки.
Использование драйвера
Распиновка
| PIN-код | Описание |
|---|---|
| ВИН | Подключение питания платы от 8 В до 50 В (защита от переполюсовки до 40 В). |
| ВМ | Этот контакт обеспечивает доступ к источнику питания двигателя после защиты от обратного напряжения MOSFET (см. схему платы внизу этой страницы). Его можно использовать для подачи защищенного от обратного тока питания на другие компоненты системы. Этот контакт также можно использовать с соседним контактом GND для добавления внешнего электролитического конденсатора в системах, где была бы полезна дополнительная шунтирующая емкость. |
| Земля | Точки заземления для источника питания двигателя и заземления управления. Источник управления и драйвер двигателя должны иметь общую землю. |
| ВЫХ1 | Выход двигателя: «положительный» конец катушки фазы А. |
| ВЫХОД2 | Выход двигателя: «отрицательный» конец катушки фазы А. |
| БУТ1 | Выход двигателя: «положительный» конец обмотки фазы B. |
| БУТ2 | Выход двигателя: «отрицательный» конец обмотки фазы B. |
| V5 (ВЫХОД) | Регулируемый выход 5 В: этот контакт обеспечивает доступ к напряжению от внутреннего регулятора DRV8711. Регулятор может обеспечить только до 10 мА, поэтому он в первую очередь полезен только для жесткого подключения входов платы к высокому уровню и подачи питания на выходы платы с открытым стоком. Он вообще не предназначен для питания внешних устройств. Примечание: этот выход 5 В отключен, когда устройство находится в спящем режиме. |
| ИОРЕФ | Все сигнальные выходы платы (кроме BEMF) являются выходами с открытым стоком, которые подтягиваются к IOREF, поэтому на этот вывод следует подавать логическое напряжение системы управления (например, 3,3 В для использования в 3,3 В системах). Для удобства его можно подключить к соседнему контакту V5 (OUT), когда он используется в системе 5 В. |
| ШАГ/АИН1 | Изменения на этом входе перемещают ток двигателя на один шаг вверх или вниз в таблице преобразования (даже если двигатель отключен). Степпингом также можно управлять через интерфейс SPI, поэтому этот вывод является необязательным. В режиме внешнего ШИМ этот вывод работает как AIN1, а не как STEP, и напрямую управляет состоянием выхода AOUT1. Степпингом также можно управлять через интерфейс SPI, поэтому этот вывод является необязательным. В режиме внешнего ШИМ этот вывод работает как AIN1, а не как STEP, и напрямую управляет состоянием выхода AOUT1. |
| ДИР/АИН2 | Вход, определяющий направление вращения шагового двигателя. Направление также можно контролировать через интерфейс SPI, поэтому этот вывод не является обязательным. В режиме внешнего ШИМ этот контакт работает как AIN2, а не как DIR, и напрямую управляет состоянием выхода AOUT2. |
| СДАТО | Вывод данных SPI. (Этот вывод также часто называют «MISO».) Этот вывод является выходом с открытым стоком и подтягивается к IOREF на плате. |
| СДАТИ | Ввод данных SPI. (Этот контакт также часто называют «MOSI».) |
| СКЛК | Вход синхронизации SPI. |
| СКС | Вход выбора чипа SPI. Логические переходы на этом выводе необходимы для связи SPI, даже если это единственное устройство на шине SPI. |
| СОН | По умолчанию драйвер устанавливает на этом контакте низкий уровень, что переводит его в спящий режим с низким энергопотреблением, когда схема драйвера двигателя и внутренний регулятор 5 В отключены, а все аналоговые схемы переводятся в состояние низкого энергопотребления. Цифровая схема по-прежнему работает в спящем режиме, поэтому к регистрам устройства можно получить доступ через последовательный интерфейс, пока IOREF подается извне. На этот контакт должен быть подан высокий уровень, чтобы включить устройство. |
| СБРОС | Вход сброса микросхемы. Высокий логический уровень на этом входе сбрасывает всю внутреннюю логику, включая индексатор и регистры устройства, и отключает выходы драйвера. Примечание: вывод RESET не работает, пока устройство находится в спящем режиме. |
| НЕИСПРАВНОСТЬ | Выход с открытым стоком, который переходит в низкий уровень при возникновении ошибки перегрузки по току, предварительного драйвера, перегрева или пониженного напряжения.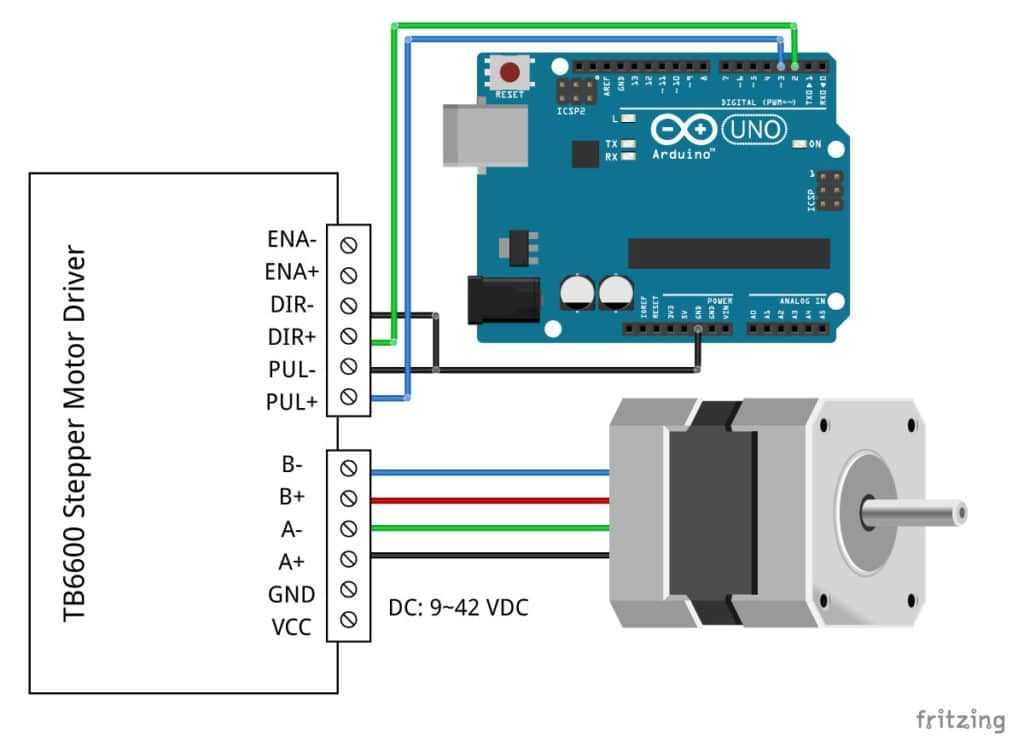 Этот вывод подтягивается к IOREF, что по умолчанию делает его высоким. Этот вывод подтягивается к IOREF, что по умолчанию делает его высоким. |
| БИН1 | В режиме внешнего ШИМ BIN1 напрямую управляет состоянием выхода BOUT1. Этот вывод не используется в режиме индексатора (т.е. при использовании этого устройства в качестве драйвера шагового двигателя). |
| БИН2 | В режиме внешнего ШИМ BIN2 напрямую управляет состоянием выхода BOUT2. Этот вывод не используется в режиме индексатора (т.е. при использовании этого устройства в качестве драйвера шагового двигателя). |
| СТОЛ/БЭМФВ | Выход с открытым стоком, подтянутый к IOREF на плате. В режиме внутреннего обнаружения опрокидывания выход становится низким при обнаружении опрокидывания. В режиме обнаружения внешнего опрокидывания выход становится низким, когда доступно достоверное измерение противо-ЭДС. |
| БЭМФ | Аналоговый выход, представляющий противо-ЭДС двигателя. Сигнал на этом выводе может быть дополнительно обработан микроконтроллером для реализации более продвинутых алгоритмов управления и обнаружения останова.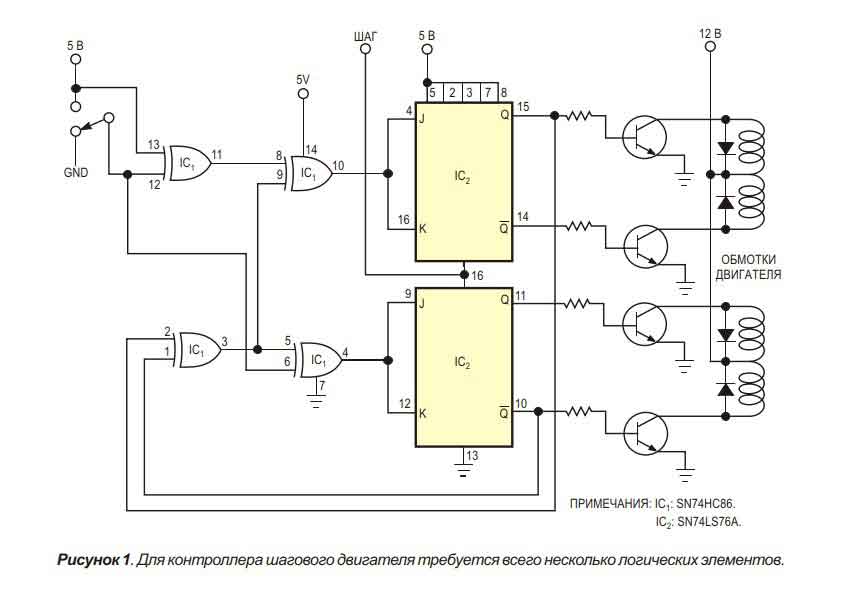 |
Для получения дополнительной информации об этих выводах см. техническое описание DRV8711.
При высоких входных напряжениях (особенно выше 30 В) и высоких ограничениях по току интерфейс SPI драйвера с большей вероятностью будет подвержен влиянию электрических помех от драйвера и шагового двигателя, что может привести к ошибкам связи. Вы можете уменьшить эти помехи с помощью тщательной проводки и экранирования, а также снизить риск неожиданного поведения, приняв соответствующие меры предосторожности при обмене данными по SPI (например, прочитайте и проверьте настройки конфигурации после их записи и избегайте настройки драйвера, когда выходы двигателя отключены). включено).
В качестве альтернативы рассмотрите возможность использования нашего многоинтерфейсного USB-контроллера мощного шагового двигателя Tic 36v4, который обеспечивает интерфейсы высокого уровня для настройки и управления (что делает ненужной прямую связь SPI).
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя.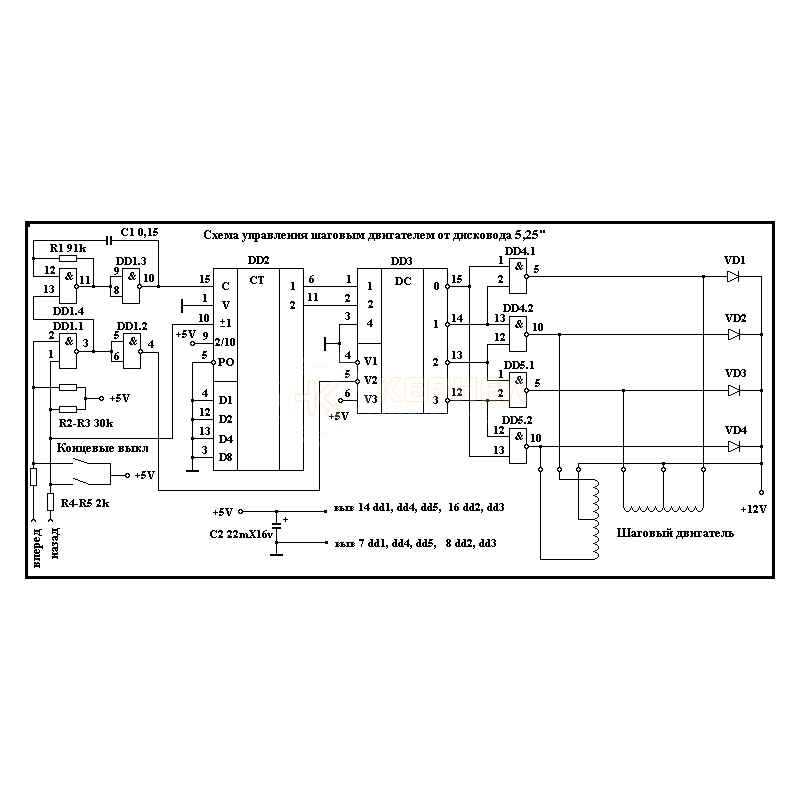 (В более общем случае переподключение чего-либо, когда оно находится под напряжением, вызывает проблемы.)
(В более общем случае переподключение чего-либо, когда оно находится под напряжением, вызывает проблемы.)
Общая типовая схема подключения
Типовая схема подключения микроконтроллера к драйверу шагового двигателя Pololu High-Power 36v4. |
|---|
В то время как High-Power Stepper Motor Driver 36v4 позволяет управлять шаговым двигателем через простой интерфейс шага и направления, его необходимо сначала включить и настроить через интерфейс SPI после каждого включения питания. Это означает, что управляющий микроконтроллер должен быть способен действовать как мастер SPI (либо с периферийным SPI, либо с программным SPI), и он должен быть подключен к контактам SDATI, SCLK и SCS. Хотя выводы SDATO и FAULT не требуются для использования этого драйвера, обычно рекомендуется использовать их для отслеживания ошибок.
Типовая схема подключения (только для систем 5 В)
Типовая схема подключения микроконтроллера с логическим напряжением 5 В к драйверу шагового двигателя Pololu High-Power 36v4. |
|---|

Высокомощный драйвер шагового двигателя 36v4 имеет внутренний регулятор 5 В, который можно использовать для питания IOREF в тех случаях, когда плата используется в системах 5 В. Мы предоставляем закорачивающий блок для подключения V5 к IOREF, или для более компактного соединения вы можете соединить перемычкой для поверхностного монтажа, расположенной рядом с этими контактами (выделено на рисунке ниже).
Обратите внимание, что подача IOREF от V5 не позволяет получить доступ к регистрам устройства через SPI, когда устройство находится в спящем режиме, поскольку выход регулятора V5 отключен, когда SLEEP находится на низком уровне.
Перемычка для поверхностного монтажа для контактов V5 и IOREF драйвера шагового двигателя высокой мощности Pololu 36v4. |
|---|
Библиотека Arduino и код примера
Мы написали библиотеку драйверов мощных шаговых двигателей для Arduino, которая предоставляет базовые функции для настройки и работы драйвера с помощью контроллера, совместимого с Arduino или Arduino. Библиотека включает в себя несколько примеров эскизов.
Библиотека включает в себя несколько примеров эскизов.
Соображения по рассеиваемой мощности
Высокомощный драйвер шагового двигателя 36v4 может обеспечить непрерывный ток до 4 А на фазу в типичных условиях, но фактический ток, который он может обеспечить, будет зависеть от того, насколько хорошо вы сможете охлаждать модуль. Печатная плата драйвера предназначена для отвода тепла от МОП-транзисторов, но производительность можно улучшить, добавив радиатор или принудительный поток воздуха. (Наоборот, производительность будет снижена в приложениях, которые ограничивают рассеивание тепла, таких как высокие температуры окружающей среды или работа в корпусах.) При достаточном дополнительном охлаждении драйвер может подавать до 6 А на фазу, прежде чем превысит номинальную мощность 1 Вт 30 Токоизмерительные резисторы мОм.
Ограничение тока драйвера устанавливается через его интерфейс SPI. Вы можете подтвердить правильность настройки, используя мультиметр для измерения фактического тока через одну из катушек, когда шаговый двигатель находится в полношаговом режиме, а не в шаговом. Ток, который вы измеряете таким образом, будет составлять примерно 70% от установленного предела. Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Ток, который вы измеряете таким образом, будет составлять примерно 70% от установленного предела. Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Предупреждение: Этот драйвер двигателя не имеет функции отключения при перегреве (в то время как микросхема DRV8711 имеет защиту от перегрева, первыми перегреваются внешние МОП-транзисторы). Перегрев может привести к необратимому повреждению привода двигателя. Мы настоятельно рекомендуем вам не увеличивать настройку ограничения тока выше 4 А (или ниже в приложениях с пониженным тепловыделением), если только вы не убедитесь, что температура полевых МОП-транзисторов останется ниже 140 °C.
Мы настоятельно рекомендуем вам не увеличивать настройку ограничения тока выше 4 А (или ниже в приложениях с пониженным тепловыделением), если только вы не убедитесь, что температура полевых МОП-транзисторов останется ниже 140 °C.
Примечание. При включении драйвера значение ограничения тока по умолчанию устанавливается на максимальное значение (~18 А). Убедитесь, что вы установили что-то подходящее как для вашего шагового двигателя, так и для драйвера, прежде чем активировать выходы!
Этот продукт может нагреть до такой степени, что обожжет вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Принципиальная схема
Принципиальная схема драйвера шагового двигателя высокой мощности Pololu 36v4. |
|---|
Эта диаграмма также доступна в формате для загрузки в формате pdf (117k pdf).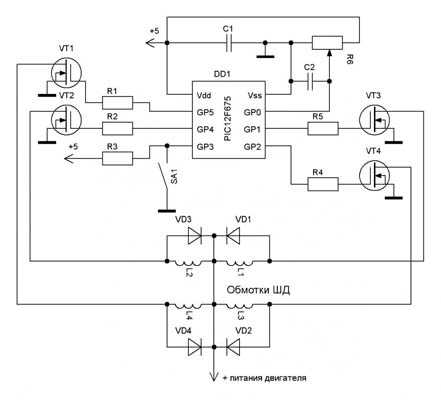
Коллекция цепей BEAM — это | Шаговый двигатель Wilf на базе Nu Уилф Ригтер придумал изящную (одну ИС!) схему для Я воспроизвел собственное описание этой схемы, данное Уилфом.
Обратите внимание, что публикация NuCore, на которую ссылается Уилф, Я буду обновлять эту страницу по мере того, как (успею…) Предупреждение Вот другая схема схемы NuStepper. Четыре поля в правом нижнем углу (Yl/Bk/Or/
Вот как разместить компоненты на печатной плате NuStepper Список деталей
Значения C и R2 определяют возбуждение нейрона Когда я собираю эту карту, микросхема 74*86 «сокетная», | |||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||
 Н-мост
Н-мост
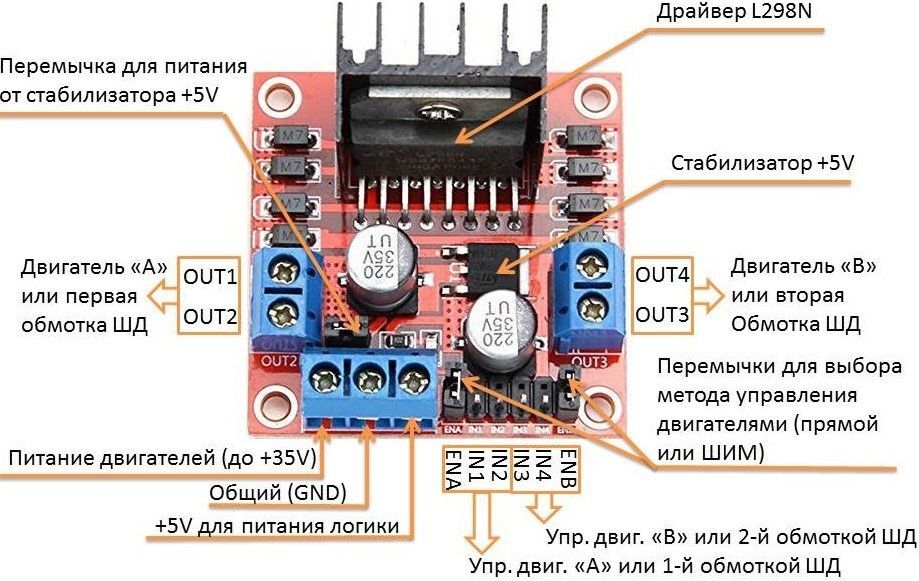
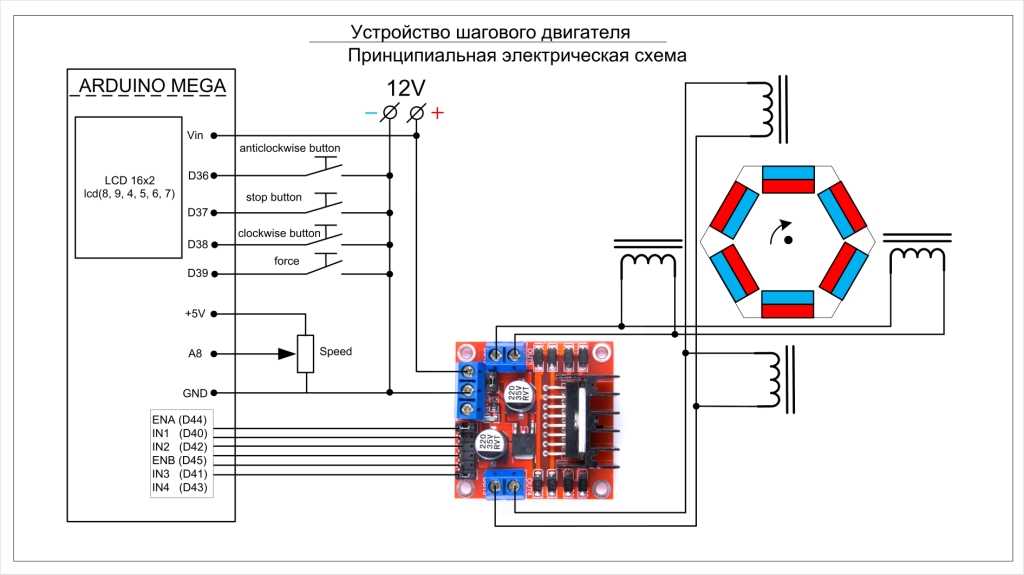 Процесс
Процесс В
ВЦепи привода шагового двигателя
A Цепи привода шагового двигателя обычно питаются от источника постоянного тока низкого напряжения. Когда фаза должна быть под напряжением, источник постоянного тока подключается к фазе с помощью полупроводникового переключателя S (рис. 8.9).).
Фазный ток нарастает со скоростью, определяемой электрической постоянной времени фазной обмотки. Когда фаза должна быть обесточена, переключатель выключается, который передает ток на обратный диод D F . Ток падает до нуля, опять же со скоростью, определяемой постоянной времени фазной обмотки. Крутящий момент двигателя, который является функцией i ph , нарастает и спадает таким же образом. Чтобы максимизировать крутящий момент шагового двигателя, схемы привода шагового двигателя должны быть такими, чтобы ток нарастал и спадал как можно быстрее, в идеале, как показано пунктирными линиями на рис. 8.9.(б). Это особенно важно, когда требуются высокие скорости шага, как показано на рис. 8.9(c). Схемы привода шагового двигателя разработаны с учетом этого требования.
Униполярный привод для двигателей с переменным сопротивлением:
В случае двигателей с переменным сопротивлением необходимо только включить или выключить фазные токи, полярность тока не имеет значения. Достаточно униполярного привода, способного подавать ток только в одном направлении. Простая униполярная схема привода, подходящая для маломощного двухфазного двигателя с переменным сопротивлением, показана на рис. 8.10.
Когда переключатель S 1 замкнут, обмотка фазы А подключается к источнику постоянного тока V d и фазный ток нарастает, а при размыкании фазный ток спадает в цепи свободного хода, состоящей из фазы А, D F и R F . Внешний резистор R E уменьшает электрическую постоянную времени, тем самым ускоряя нарастание тока. Номинал внешнего резистора R E выбирается таким образом, чтобы зафиксировать значение электрической постоянной времени, а затем напряжение источника V д выбирают для получения номинального тока I R в фазной обмотке. Таким образом
где R P сопротивление фазной обмотки.
В течение периода включения фазный ток также протекает через внешний резистор R E , в результате чего большая часть энергии, потребляемой от источника, рассеивается на R E . Кроме того, энергия, накопленная в индуктивности фазной обмотки в течение периода включения переключателя, полностью рассеивается в сопротивлениях цепи свободного хода, когда переключатель выключен. Из-за этих потерь энергии униполярная схема на рис. 8.10 очень неэффективна и, следовательно, подходит только для маломощных цепей привода шагового двигателя.
На рис. 8.11 показана эффективная униполярная схема возбуждения, способная обеспечить быстрое нарастание и затухание тока. Он использует принцип чоппера. Показанная цепь предназначена только для одной фазы. Каждая другая фаза будет использовать аналогичную схему. Напряжение источника постоянного тока теперь может быть намного больше, чем в схемах привода шагового двигателя на рис. 8.10.
На рисунках 8.11(a), (b) и (c) показаны схема возбуждения, фазное напряжение и кривые тока соответственно. Для подачи питания на фазу используются полупроводниковые переключатели S 1 и S 2 закрываются в t = t o . Это подключает фазную обмотку к источнику постоянного напряжения V d , и фазный ток i ph быстро нарастает. Когда он пересекает номинальный ток I R на заданную величину, S 1 отключается. Фазный ток проходит через S 2 и D 2 и уменьшается ниже I R . Через фиксированный интервал включается S 1 . Ток фазы i ph увеличивается. При превышении номинального тока I R на положенную сумму, снова S 1 отключается. Таким образом, попеременно выключая переключатель S 1 , значение фазного тока поддерживается равным примерно I R . При t = t 0 + T фаза обесточивается путем отключения обоих S 1 и S 2 . Теперь фазный ток протекает по пути, состоящему из D 1 , источника V d и D 2 , и большая часть энергии, запасенной в индуктивности фазной обмотки, возвращается обратно к источнику V д . Поскольку фазный ток должен протекать против большого напряжения V d , он быстро спадает до нуля.
Биполярный привод для двигателей с постоянными магнитами и гибридных двигателей:
Простая биполярная схема привода для одной фазы показана на рис. 8.12. Каждая другая фаза будет использовать аналогичную схему. Фазная обмотка пропускает положительный ток, когда полупроводниковые переключатели S 1 и S 2 проводят ток, и отрицательный ток, когда S 3 и S 4 провод.
На фазную обмотку подается положительный ток при включении S 1 и S 2 . Внешнее сопротивление R E снижает электрическую постоянную времени, позволяя быстро нарастать фазному току. V d и R E выбраны так, чтобы удовлетворять уравнению (8.1). Фаза обесточивается выключением S 1 и S 2 . Ток обмотки теперь протекает по пути, состоящему из D 3 , источник В д и Д 4 .