Содержание
Что такое шаговый двигатель, и зачем он нужен?
Шаговый двигатель — это электромеханичское
устройство, которое преобразует электрические импульсы в дискретные
механические перемещения. Так, пожалуй, можно дать строгое определение.
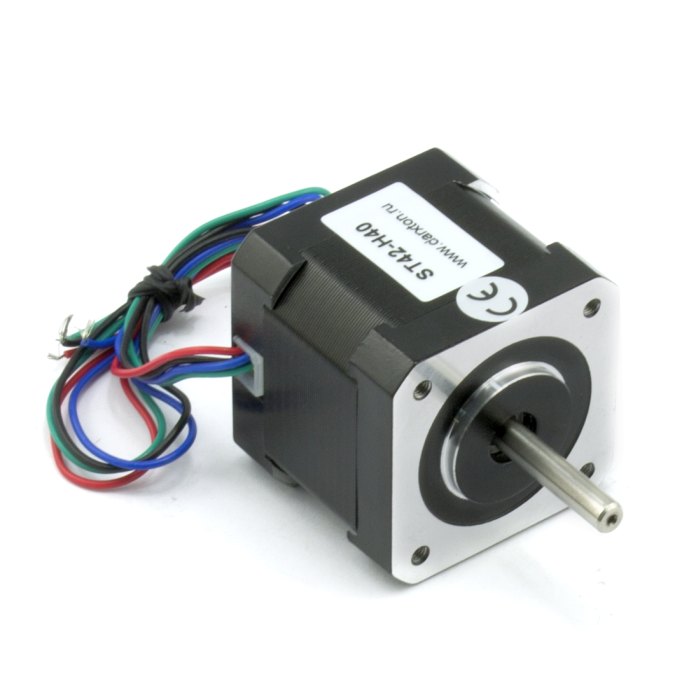
Наверное, каждый видел, как выглядит шаговый двигатель внешне: он
практически ничем не отличается от двигателей других типов. Чаще всего это
круглый корпус, вал, несколько выводов (рис. 1).
Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Однако шаговые двигатели обладают некоторыми уникальными
свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми.
Чем же хорош шаговый двигатель?
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- прецизионное позиционирование и повторяемость.
 Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не
Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не
накапливается от шага к шагу - возможность быстрого старта/остановки/реверсирования
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
Но не все так хорошо…
- шаговым двигателем присуще явление резонанса
- возможна потеря контроля положения ввиду работы без обратной связи
- потребление энергии не уменьшается даже без нагрузки
- затруднена работа на высоких скоростях
- невысокая удельная мощность
- относительно сложная схема управления
Что выбрать?
Шаговые двигатели относятся к классу бесколлекторных
двигателей постоянного тока. Как и любые бесколлекторные двигатели, они
Как и любые бесколлекторные двигатели, они
имеют высокую надежность и большой срок службы, что позволяет использовать
их в критичных, например, индустриальных применениях. По сравнению с
обычными двигателями постоянного тока, шаговые двигатели требуют
значительно более сложных схем управления, которые должны выполнять все
коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель
— дорогостоящее устройство, поэтому там, где точное позиционирование не
требуется, обычные коллекторные двигатели имеют заметное преимущество.
Справедливости ради следует отметить, что в последнее время для управления
коллекторными двигателями все чаще применяют контроллеры, которые по
сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является
возможность осуществлять точное позиционирование и регулировку скорости
без датчика обратной связи. Это очень важно, так как такие датчики могут
стоить намного больше самого двигателя.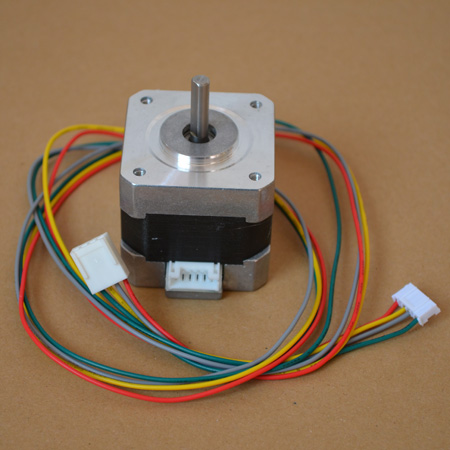 Однако это подходит только для
Однако это подходит только для
систем, которые работают при малом ускорении и с относительно постоянной
нагрузкой. В то же время системы с обратной связью способны работать с
большими ускорениями и даже при переменном характере нагрузки. Если
нагрузка шагового двигателя превысит его момент, то информация о положении
ротора теряется и система требует базирования с помощью, например,
концевого выключателя или другого датчика. Системы с обратной связью не
имеют подобного недостатка.
При проектировании конкретных систем приходится делать
выбор между сервомотором и шаговым двигателем. Когда требуется
прецизионное позиционирование и точное управление скоростью, а требуемый
момент и скорость не выходят за допустимые пределы, то шаговый двигатель
является наиболее экономичным решением. Как и для обычных двигателей, для
повышения момента может быть использован понижающий редуктор. Однако для
шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных
В отличие от коллекторных
двигателей, у котрых момент растет с увеличением скорости, шаговый
двигатель имеет больший момент на низких скоростях. К тому же, шаговые
двигатели имеют гораздо меньшую максимальную скорость по сравнению с
коллекторными двигателями, что ограничивает максимальное передаточное
число и, соответственно, увеличение момента с помощью редуктора. Готовые
шаговые двигатели с редукторами хотя и существуют, однако являются
экзотикой. Еще одним фактом, ограничивающим применение редуктора, является
присущий ему люфт.
Возможность получения низкой частоты вращения часто
является причиной того, что разработчики, будучи не в состоянии
спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В
то же время коллекторный двигатель имеет более высокую удельную мощность,
низкую стоимость, простую схему управления, и вместе с одноступенчатым
червячным редуктором он способен обеспечить тот же диапазон скоростей, что
и шаговый двигатель. К тому же, при этом обеспечивается значительно
К тому же, при этом обеспечивается значительно
больший момент. Приводы на основе коллекторных двигателей очень часто
применяются в технике военного назначения, а это косвенно говорит о
хороших параметрах и высокой надежности таких приводов. Да и в современной
бытовой технике, автомобилях, промышленном оборудовании коллекторные
двигатели распространены достаточно сильно. Тем не менее, для шаговых
двигателей имеется своя, хотя и довольно узкая, сфера применения, где они
незаменимы.
| Применение шаговых двигателей Биполярные и униполярные шаговые двигатели Шаговые двигатели с постоянными магнитами Гибридные шаговые двигатели |
Виды шаговых двигателей Управление фазами шаговых двигателей Двигатели с переменным магнитным сопротивлением |
Шаговый двигатель для ЧПУ — ООО «СЗЭМО Электродвигатель»
Шаговые электродвигатели (ШД) используются там, где нужно позиционирование повышенной точности.
Что такое шаговый двигатель? Это синхронный двигатель без щеток, имеющий несколько обмоток. Для фиксации ротора в определенной позиции ток подается в одну из обмоток статора. По поступлении тока в другую обмотку ротор меняет позицию. Это и есть «шаг».
Типы ШД и их устройство
- С переменным магнитным сопротивлением. На статичной части таких ШД есть несколько полюсов. Ротор – зубчатой формы из мягкого материала, ненамагниченный. Если, к примеру, статор 6-полюсный, а ротор из 4 зубцов, то независимых обмоток на двух противоположных статорных полюсах будет 3. Шаг мотора будет равен 30°.
- С постоянными магнитами в роторе. Прямолинейные полюсы параллельны оси двигателя. Поскольку магнитный поток мощнее, крутящий момент на порядок выше, чем в ШД первого типа. Шаг такого мотора – от 7,5 до 15°.Может быть от 24 до 48 шагов на оборот.
- Гибридные ШД (ГШД). Установка зубцов в направлении оси сокращает величину шага. Крутящий момент и скорость возрастают. Обычно бывает от 100 до 400 шагов за оборот при угле шага 0,9-3,6°. Наиболее распространен биполярный ШД nema. Только в гибридных ШД применяется режим микрошага. Управление обмотками независимое. Плавность вращения подвижной части повышена. Возможны 51200 шагов за оборот. Точность позиционирования оптимальна. Обеспечивается более низкая магнитная проводимость зазоров относительно удельной проводимости зубцов.
 Обычно бывает от 100 до 400 шагов за оборот при угле шага 0,9-3,6°. Наиболее распространен биполярный ШД nema. Только в гибридных ШД применяется режим микрошага. Управление обмотками независимое. Плавность вращения подвижной части повышена. Возможны 51200 шагов за оборот. Точность позиционирования оптимальна. Обеспечивается более низкая магнитная проводимость зазоров относительно удельной проводимости зубцов.
Обычно бывает от 100 до 400 шагов за оборот при угле шага 0,9-3,6°. Наиболее распространен биполярный ШД nema. Только в гибридных ШД применяется режим микрошага. Управление обмотками независимое. Плавность вращения подвижной части повышена. Возможны 51200 шагов за оборот. Точность позиционирования оптимальна. Обеспечивается более низкая магнитная проводимость зазоров относительно удельной проводимости зубцов.ШД по типу обмоток подразделяются на:
- Биполярные с одной обмоткой для каждой фазы. Переплюсовка драйвером изменяет направление магнитного поля.
- Униполярные. В каждой фазе одна обмотка, но из середины каждой обмотки имеется отвод. Направление поля меняется за счет переключения используемой половины обмотки. Драйвер имеет только 4 ключа.
Характеристики ШД
- Крутящий момент. Его измеряют в кг-сила-см. Чем выше показатель зависимости вращательного момента от частоты вращения, тем быстрее ШД набирает обороты после включения.
- Удерживающий момент или сила блокирования ротора статором при включенном, но не запущенном моторе. Его измеряют в унциях-на-дюйм.
- Тормозящий или стопорный момент, т.е. сила, которая удерживает ротор от вращения без подачи тока. В ГШД эта величина в 10 раз меньше величины силы удерживания ротора от вращения при полной подаче тока. Измеряется в унциях-на-дюйм.
- Номинальное напряжение, зависящее от индуктивности обмоток. Указывается в вольтах. По нему определяют оптимальное напряжение для подачи в мотор. Наилучшее напряжение превышает номинальное. Превышение силы подаваемого тока ведет к перегреву и поломке двигателя. При недостаточном напряжении он не запустится. Оптимальную силу тока определяют по формуле U = 32 x√ L. L – индуктивность обмотки, а U – искомое значение.
- Диэлектрические испытания. По максимальному напряжению, которое выдерживает обмотка в течение определенного времени, определяют сопротивление мотора перегрузкам.
- Момент инерции ротора – это скорость разгона ШД, которую измеряют в грамм-квадратных см.
- Число полных шагов за оборот. Чем оно больше, тем мощнее и быстрее мотор.
- Длина корпуса без учета вала и общая масса или вес изделия. По габаритам и массе определяют, когда нужен компактный двигатель, а когда – крупнее и мощнее.
 Его измеряют в унциях-на-дюйм.
Его измеряют в унциях-на-дюйм.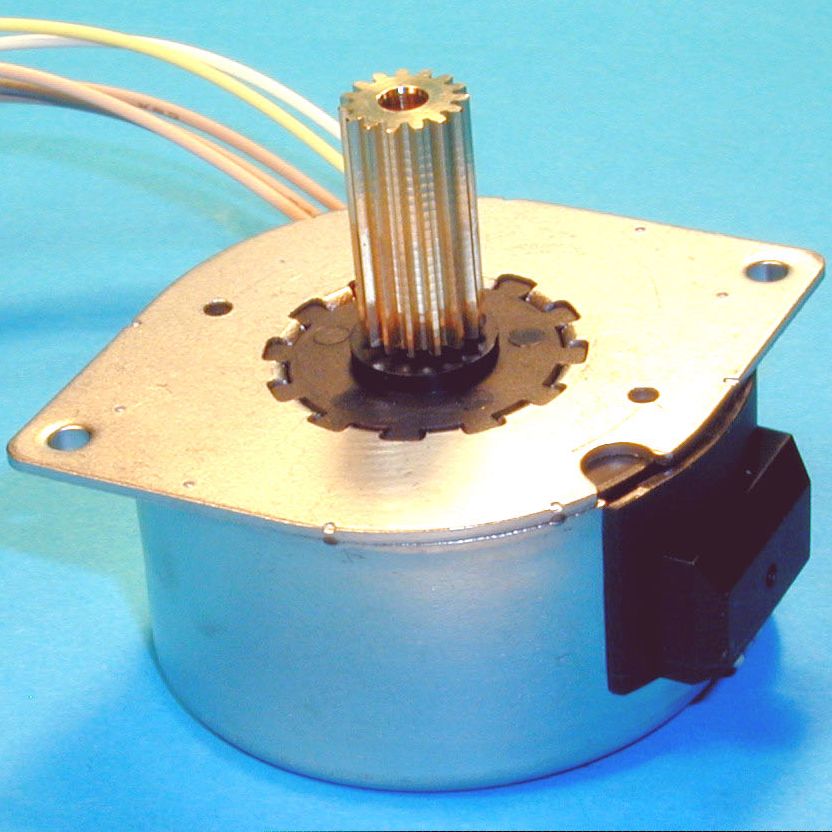 Чем оно больше, тем мощнее и быстрее мотор.
Чем оно больше, тем мощнее и быстрее мотор.К примеру, в ШД PL57h51 PL57 – ширина-высота (диаметр) по квадратному фланцу 57 мм, h51 – длина двигателя без вала, равная 41 мм. Диаметр двигателя влияет на все его моменты больше, чем длина.
Инкодеры, драйверы и подключение
Специальные драйверы подключают к компьютерному LTP-порту и посредством их управляют ШД. Драйвер – это практически блок управления ШД. В шаговых двигателях для ЧПУ к драйверу присоединяют 4 вывода ШД и управляющие провода с контроллера ЧПУ, и плюс и минус с блока питания. Поступая в драйвер, сигналы контроллера управляют переключением ключей силовой схемы питающего напряжения. Через эти ключи питающее напряжение идет на двигатель.
Максимальный выдаваемый на выводы для обмоток мотора ток нужного напряжения – основной критерий подбора драйвера. Идущий с драйвера ток не должен быть ниже тока, потребляемого мотором. Параметры выходного напряжения выставляются переключателями на драйвере.
Идущий с драйвера ток не должен быть ниже тока, потребляемого мотором. Параметры выходного напряжения выставляются переключателями на драйвере.
В двигателе может быть от 4 до 6 проводов, и от их количества зависит порядок подключения ШД. Биполярные механизмы сочетаются только с 4-проводными двигателями.
На каждые 2 обмотки приходится 2 провода. Самые мощные 6-проводные моторы могут подключаться и к биполярным, и к униполярным устройствам, и в них на каждую обмотку приходится средний провод или центр-кран и 2 провода. В униполярных моторах на каждую обмотку приходятся 3 провода. Два из них подсоединяют к транзисторам, а центр-кран – к источнику питания.
В 5-проводных ШД центральные провода вместе с остальными входят в общий кабель. Предпочтительно найти средний провод и соединить его с другими проводниками.
Датчики, подающие сигналы программному обеспечению, называют энкодерами и часто применяют с ШД. Энкодер нужен, когда налицо нелинейная зависимость от количества шагов.
Области использования, достоинства и недостатки
Шаговые двигатели для ЧПУ широко применяются в координатных столах и системах автоматизации. Панелям управления, программирования и станкам с ЧПУ не обойтись без ШД.
ШД – достойная альтернатива серводвигателю, поскольку, в отличие от него:
- Хорошо работает при весьма разнообразных нагрузках.
- Имеет постоянный угол поворота и стандартизированные габариты.
- Имеет низкую стоимость.
- Прост в монтаже и эксплуатации, долговечен и надежен.
- Пропуская шаги, не сгорает при крайне высоких оборотах.
Тем не менее, ШД уступает серводвигателю в том, что:
- У него мал КПД и велико энергопотребление.
- Увеличение частоты оборотов резко снижает крутящий момент.
- Мощность слишком мала для таких габаритов и веса.
- Велик нагрев двигателя при работе.
- Мотор слишком шумит на высокой и средней частотах.
какова разница и что выбрать? — MULTICUT
Обновлено: 31.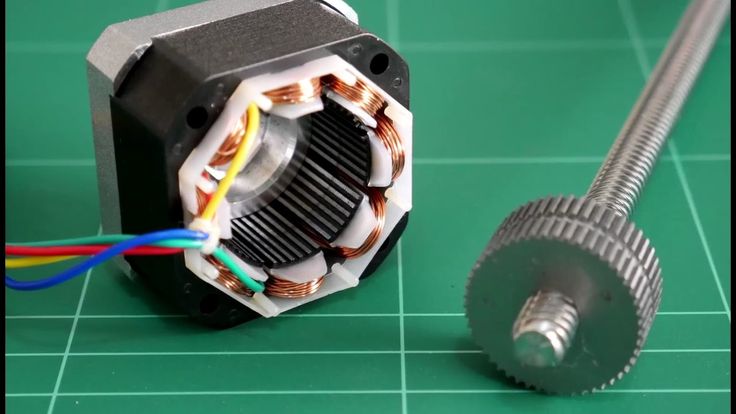 08.2022
08.2022
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.
Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.
Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Пройти тест
Чем отличается сервопривод от шагового двигателя?
|
Критерий сравнения |
Шаговые двигатели |
Сервоприводы |
|---|---|---|
|
Эксплуатационный ресурс |
Шаговые электромоторы не имеют коллекторного узла, подверженного износу.  Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене
|
Коллекторные серводвигатели необходимо регулярно обслуживать. Максимальный срок службы коллекторного узла — 5000 часов непрерывной работы. При этом бесщеточные сервомоторы не уступают в надежности шаговым двигателям |
|
Точность перемещений исполнительного органа |
|
|
|
Время разгона и скорость перемещения портала |
|
|
|
Реакция на принудительную остановку |
Шаговые двигатели хорошо переносят механические перегрузки и не выходят из строя при аварийных остановках |
Сервоприводы необходимо оснащать дополнительной защитой, отключающей электромотор при принудительной остановке портала. В противном случае обмотки электрической машины могут сгореть |
|
Стоимость |
За счет простоты конструкции шаговый двигатель имеет относительно невысокую цену |
За счет датчиков обратной связи (энкодеров) и более сложной схемы регулирования сервопривод считается дорогостоящим оборудованием |

Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
-
Производительность.
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель. -
Эксплуатационные расходы.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше. -
Точность.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
-
Цена.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант. -
Уровень шума.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.

 Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.
Читайте также
Обновлено: 18.08.2022
Фрезерные станки с ЧПУ для малого бизнеса
Для построения и развития успешного бизнеса, связанного с работой на фрезерном станке с ЧПУ, важно наличие значительных преимуществ перед конкурентами: например, высочайшего качества продукции и доступных цен. В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности…
В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности…
Подробнее
Обновлено: 18.08.2022
Технические характеристики и сфера применения фрезерных станков с ЧПУ
Станки с ЧПУ значительно повлияли на сферу металлообработки и на работу с другими материалами. Программируемые установки обеспечиваюют повышенную точность фрезеровки, что приводит к значительному увеличению производительности труда. Процесс обработки заготовок проходит беспрерывно и в строгом соответствии заданной программе, а результат работы отличается высокой точностью. В статье мы рассмотрим важнейшие технические характеристики фрезерных станков с ЧПУ и основные сферы их применения…
Подробнее
Обновлено: 18.08.2022
Фрезы для деревообрабатывающих станков с ЧПУ
Рабочий режущий инструмент станков с ЧПУ — это фреза. Конструктивно она является вращающейся деталью с заточенными зубьями. Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…
Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…
Подробнее
Обновлено: 06.09.2022
Характеристики шагового двигателя
Шаговое устройство — бесщеточный двигатель с несколькими обмотками, функционирующий по синхронному принципу. Принцип работы шагового двигателя заключается в поочередной активации обмоток, которые обеспечивают вращение / остановку ротора…
Подробнее
Обновлено: 06.09.2022
Специфика сверлильных станков с ЧПУ
Современные сверлильные станки с ЧПУ используются на производствах, на которых в больших объемах осуществляется обработка деталей всевозможного назначения, например, на мебельных фабриках. Сегодня производители предлагают покупателям модели сверлильных станков с ЧПУ во всем функциональном многообразии. ..
..
Подробнее
Возврат к списку
Поделиться:
Шаговый двигатель
Реализуйте модель шагового двигателя
Библиотека
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
Описание
Блок Stepper Motor (STM) реализует типовую модель, которая представляет два самых популярных семейства шаговых двигателей:
Модель Stepper Motor состоит из электрических и механических разделов. Электрический раздел представлен эквивалентной схемой, настройка которой зависит от моторного типа. Эквивалентные схемы принимают, что магнитная схема линейна (никакое насыщение), и взаимная индуктивность между фазами незначительна. Механический раздел представлен моделью в пространстве состояний на основе момента инерции и коэффициента вязкого трения.
Этот рисунок показывает эквивалентную схему для одной фазы в шаговом двигателе переменного нежелания.
В этой модели Ra и La (θ), соответственно, представляют сопротивление и индуктивность фазы обмотка. Извилистая индуктивность варьируется в зависимости от положения ротора:
La (θ) = L 0 + L 1cos (Nrθ),
где,
L 0 является средней индуктивностью.
L 1 является максимальным изменением индуктивности.
Nr является зубным номером ротора.
В ссылочном положении (θ = 0), зуб ротора полностью выравнивается с полюсом A-оси, чтобы достигнуть максимальной A-фазы извилистая индуктивность.
Общий электромагнитный крутящий момент, произведенный двигателем, является суммой крутящих моментов, произведенных моторными фазами:
Te=∑x=1m0. 5ix2dLxdθ,
5ix2dLxdθ,
где,
m является количеством фаз.
ix является обмоткой, текущей в фазе x.
Lx является функцией индуктивности обмотки фазы x.
Этот рисунок показывает эквивалентную схему для одной фазы в постоянном магните (PM), или гибридный шаговый двигатель.
В этой модели Ra и La, соответственно, представляют сопротивление и индуктивность обмотки A-фазы. Из-за большого значения воздушного зазора, введенного магнитами, извилистая индуктивность премьер-министра или гибридного шагового двигателя может считаться независимой от положения ротора. Исходный ea напряжения (θ) представляет моторную противоэлектродвижущую силу (EMF), который является синусоидальной функцией положения ротора:
ea(θ)=−pψmsin(pθ)dθdt,
где,
Обратите внимание на то, что в ссылочном положении (θ = 0), Северный полюс на роторе полностью выравнивается с полюсом A-оси, чтобы достигнуть нулевого значения коэффициента противо-ЭДС A-фазы.
Электромагнитный крутящий момент, произведенный двухфазным PM или гибридным шаговым двигателем, равен сумме крутящего момента, следующего из взаимодействия токов фазы и магнитных потоков, созданных магнитами и крутящим моментом стопора, который следует из выступа ротора:
Te = –pψmiasin(pθ) – sin pψmib (pθ – π/2) – T dmsin (m Nrθ).
где,
Параметры
Постоянный магнит / гибрид
- Motor type
Выберите
Permanent-magnet/Hybrid(значение по умолчанию), чтобы реализовать премьер-министра или гибридный шаговый двигатель.- Number of phases
Выберите
2(значение по умолчанию) или4фазы.- Winding inductance
Индуктивность, La, в H, каждой обмотки фазы. Значением по умолчанию является
10e-3.- Winding resistance
Сопротивление, Ra, в Омах, каждой обмотки фазы. Значением по умолчанию является
1.2.- Step angle
Угол шага, в градусах, перемещения ротора. Значением по умолчанию является
30.- Maximum flux linkage
Максимальное потокосцепление, ψm, в V.s, произведенном магнитами. Значением по умолчанию является
0.04.- Maximum detent torque
Максимальный крутящий момент стопора, Tdm, в N.m, следуя из выступа ротора. Значением по умолчанию является
0.02.- Total inertia
Общий импульс инерции, J, в kg.m2, из двигателя и загрузки. Значением по умолчанию является
1e-4/5.- Total viscous friction coefficient
Общий коэффициент вязкого трения, B, в N.
m.s, двигателя и загрузки. Значением по умолчанию является 1e-3.- Initial speed
Начальная скорость вращения, ω0, в rad/s. Значением по умолчанию является
0.- Initial position
Начальное положение ротора, Θ0, в градусах. Значением по умолчанию является
0.- Sample time (-1 for inherited)
Задайте шаг расчета шагового двигателя в s. Задайте
–1наследовать шаг расчета блока powergui в вашей модели. Значением по умолчанию является–1.

 m.s, двигателя и загрузки. Значением по умолчанию является
m.s, двигателя и загрузки. Значением по умолчанию является Переменное нежелание
- Motor type
Выберите
Variable reluctanceреализовывать шаговый двигатель переменного нежелания.- Number of phases
Выберите
3, 4, или5фазы.- Maximum winding inductance
Максимальная индуктивность, Lmax, в H, каждой обмотки фазы.
Значением по умолчанию является 10e-3.- Minimum winding inductance
Минимальная индуктивность, Lmin, в H, каждой обмотки фазы. Значением по умолчанию является
2e-3.- Winding resistance
Сопротивление, Ra, в Омах, каждой обмотки фазы. Значением по умолчанию является
1.2.- Step angle
Угол шага, в градусах, перемещения ротора. Значением по умолчанию является
30.- Total inertia
Общий импульс инерции, J, в kg.m2, из двигателя и загрузки. Значением по умолчанию является
1e-4/5.- Total friction
Общий коэффициент вязкого трения, B, в N.m.s, двигателя и загрузки. Значением по умолчанию является
1e-3.- Initial speed
Начальная скорость вращения, ω0, в rad/s.
Значением по умолчанию является 0.- Initial position
Начальное положение ротора, Θ0, в градусах. Значением по умолчанию является
0.- Sample time (-1 for inherited)
Задайте шаг расчета шагового двигателя в s. Задайте
–1наследовать шаг расчета блока powergui в вашей модели. Значением по умолчанию является–1.
 Значением по умолчанию является
Значением по умолчанию является  Значением по умолчанию является
Значением по умолчанию является Вводы и выводы
TLМеханический крутящий момент нагрузки, в N.m.
TLположительно в моторной операции и отрицателен в работе генератора.mSimulink® выход блока является вектором, содержащим пять сигналов. Можно демультиплексировать эти сигналы при помощи блока Селектора Шины, обеспеченного в Библиотеке Simulink.
Сигнал
Определение
Модули
Символ
1
Напряжение фазы
V
Vph
2
Текущая фаза
A
Iph
3
Электромагнитный крутящий момент
N.
mTe
4
Скорость ротора
рад/с
w
5
Положение ротора
рад
Theta
 m
mКак получить параметры шагового двигателя
Параметры, используемые в модели степпера, обычно получаются из таблиц данных производителя. В случае, если параметры не доступны, можно определить их из экспериментальных измерений.
Параметры шагового двигателя переменного нежелания
Параметры, обеспеченные таблицами данных производителя, обычно: количество фаз, содержа крутящий момент, угол шага, напряжение на фазу, текущую на фазу, сопротивление обмотки, Ra, максимальную индуктивность, Lmax, среднюю индуктивность, L0, и инерцию ротора, J.
Параметры Шагового двигателя постоянного магнита/Гибрида
Параметры, обеспеченные таблицами данных производителя, обычно:
количество фаз
содержание крутящего момента
угол шага
напряжение на фазу
текущий на фазу
сопротивление обмотки, Ra
извилистая индуктивность, La
инерция ротора, J
Максимальный крутящий момент стопора, Tdm, не всегда задается. Этот параметр может быть принят, чтобы быть равным 1-10% максимального крутящего момента содержания.
Этот параметр может быть принят, чтобы быть равным 1-10% максимального крутящего момента содержания.
Максимальное потокосцепление, ψm, не всегда задается. Этот параметр может быть получен экспериментально путем управления двигателем к постоянной скорости, N, в об/мин, и путем измерения максимальной разомкнутой цепи извилистое напряжение, Em, в V.
Параметр ψm затем вычисляется следующим отношением:
ψm = (30/pπ) (Em/N),
где p является количеством пар полюса, данных p =360 / (2m · шаг. Здесь m = номер фазы, продвиньтесь = угол шага в градусах.
Примеры
power_steppermotor пример иллюстрирует работу диска шагового двигателя с помощью двухфазной гибридной модели шагового двигателя.
Ссылки
[1] Т. Кенджо, А. Сугоара, шаговые двигатели и их микропроцессорные управления, 2-й выпуск, издательство Оксфордского университета, Оксфорд, 2003.
[2] П. Акарнли, Шаговые двигатели — руководство по теории и практике, 4-му Выпуску, Учреждению Инженеров-электриков, Лондона, 2002.
Введенный в R2008a
Шаговый двигатель принцип работы
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.

К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Описание и принцип работы
Как и двигатель постоянного тока, описанный в предыдущей статье, шаговые двигатели также являются электромеханическими исполнительными механизмами, которые преобразуют импульсный цифровой входной сигнал в дискретный (инкрементальный) механический ход, широко используются в промышленных системах управления. Шаговый двигатель представляет собой тип синхронного бесщеточного двигателя, в котором он не имеет ротора с коммутатором и угольных щеток, но имеет ротор, состоящий из многих (некоторые типы имеют сотни) постоянных магнитных зубьев и статор с отдельными обмотками.
Как следует из названия, шаговый двигатель не вращается непрерывно, как обычный двигатель постоянного тока, а движется дискретными «шагами» или «приращениями», причем угол каждого вращательного движения или шага зависит от числа полюсов статора и ротора. зубья имеет шаговый мотор.
Из-за их дискретной шаговой операции шаговые двигатели могут легко вращаться за конечную долю оборота за раз, например, 1,8, 3,6, 7,5 градусов и т.д. Так, например, давайте предположим, что шаговый двигатель совершает один полный оборот 360° ровно за 100 шагов.
Тогда угол шага для двигателя задается как 360°/ 100 шагов = 3,6°за шаг. Это значение обычно известно как Шаг угла.
Существует три основных типа шагового двигателя: переменное сопротивление, постоянный магнит и гибрид (своего рода комбинация обоих). Шаговый двигатель особенно хорошо подходит для устройств, требующих точного позиционирования и повторяемость с быстрой реакцией на запуск, остановка, реверс и регулировка скорости и другой ключевой особенностью шагового двигателя является его способность удерживать заряд ровно после достижения требуемого положения.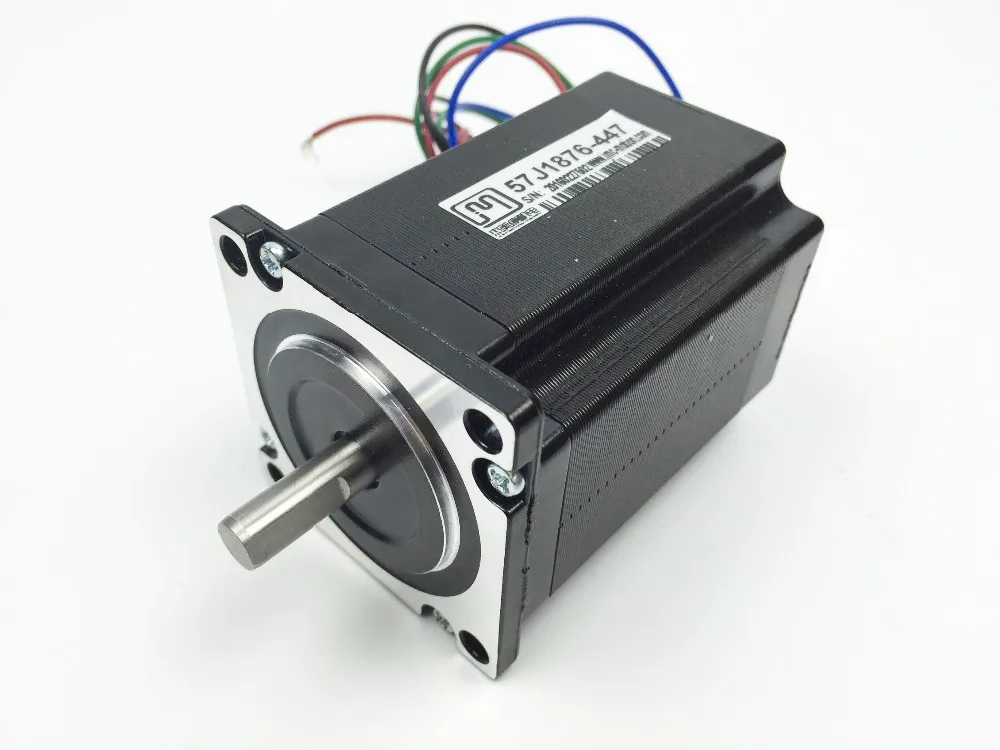
Как правило, шаговые двигатели имеют внутренний ротор с большим количеством «зубьев» постоянного магнита с рядом электромагнитных «зубьев», установленных на статоре. Электромагниты статоров поляризованы и деполяризованы последовательно, заставляя ротор вращаться по одному «шагу» за раз.
Современные многополюсные, многозубые шаговые двигатели имеют погрешность менее 0,9°на шаг (400 импульсов на оборот) и в основном используются для высокоточных систем позиционирования, подобных тем, которые используются для магнитных головок в дисководе гибких дисков / жестких дисках, принтеры / плоттеры или роботизированные устройства. Наиболее часто используемым шаговым двигателем является шаговый двигатель с шагом 200 на оборот. Он имеет 50 зубчатый ротор, 4-фазный статор и угол шага 1,8 градуса (360°/ (50 × 4)).
Конструкция и управление шаговым двигателем
В нашем простом примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например, « ADCB, ADCB, ADCB, A… » и т.д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45°.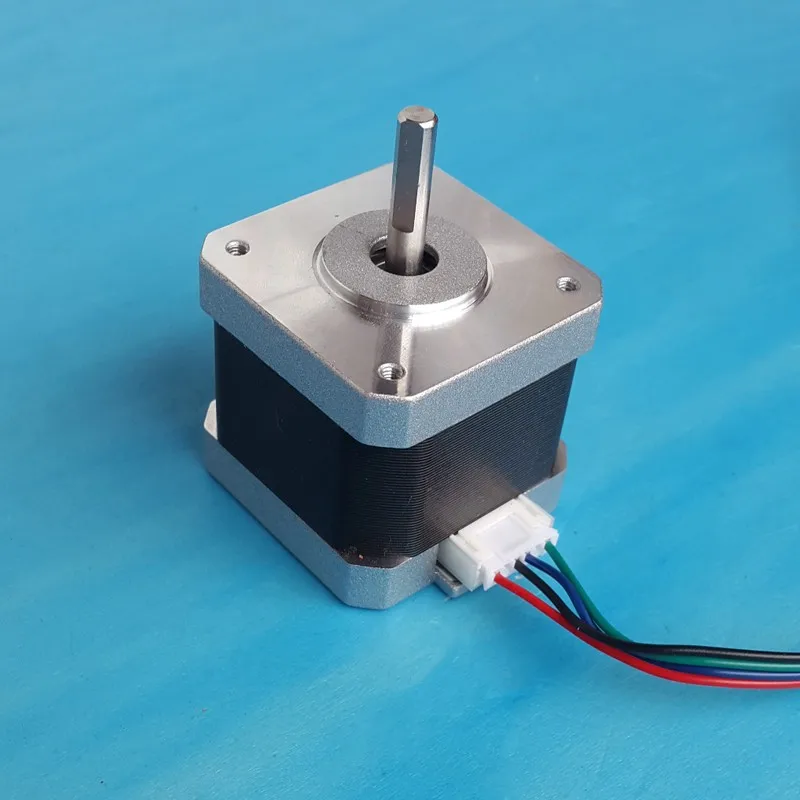 Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60°друг от друга.
Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60°друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 o / 24 = 15 o .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6°на шаг. Чтобы повернуть двигатель на угол, скажем, 216°, а затем снова остановиться в требуемом положении, потребуется всего: 216°/ (3,6°/ шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер. При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Смотрите также: Правила рациональных покупок: как не тратить лишних денег в супермаркете
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы.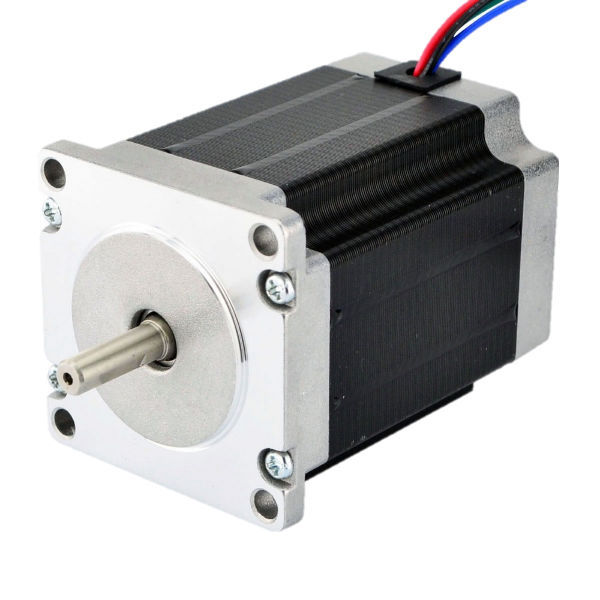 Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов.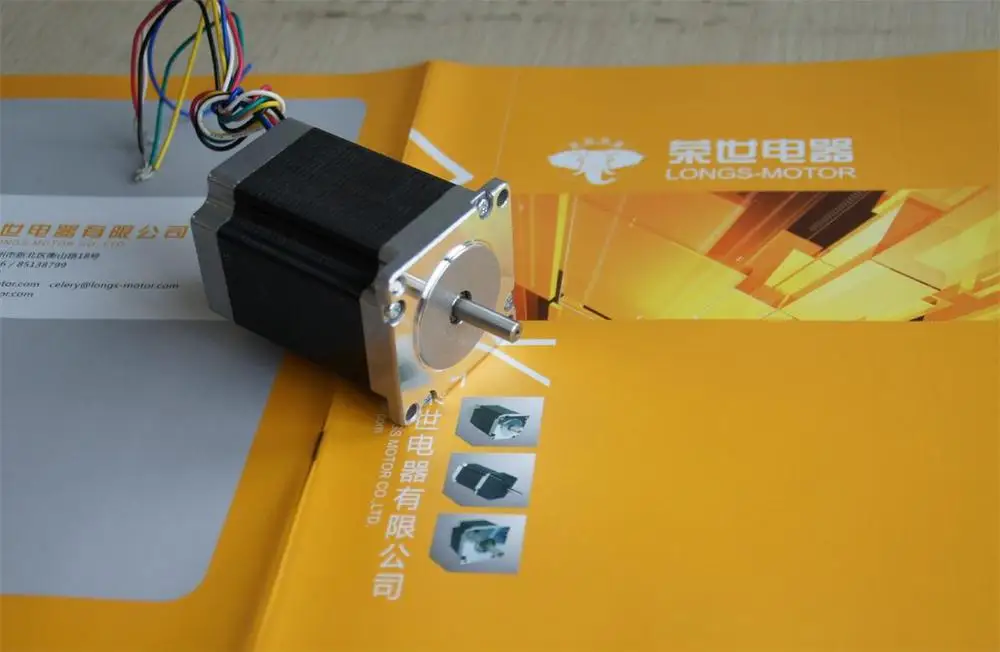 В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
Конструкция шаговых двигателей устроена таким образом, что на статоре устройства расположено определенное количество обмоток управления, на которые последовательно подаётся напряжение. Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.
Разновидности приспособления
В зависимости от некоторых деталей различают несколько типов шаговых двигателей. Каждый из них имеет некоторые особенности функционирования.
Двигатель с постоянным магнитом считается наиболее популярным, отличается простотой настройки и эксплуатации. Устройство несет в себе магнит круглой формы, напоминающий диск и имеющий разные полюса. Обмотки статора при включении прибора притягивают и отталкивают магнит на роторе, что и обеспечивает кручение механизма.
При использовании такого типа двигателя величина шага измеряется, и показатель колеблется в пределах 45−90 градусов. Простота применения приспособления делает его востребованным, а длительный срок службы позволяет не думать о частой замене.
Прибор с переменными магнитами
Такие приспособления не имеют на роторе специального магнита. Эта деталь изготовлена из магнитного, мягкого металла, имеет форму зубчатого диска, напоминающего шестеренку. На статоре расположено более четырех разных обмоток. Запитываются они в противоположных парах и притягивают к себе ротор.
Стоит отметить, что величина крутящегося момента несколько снижается, поскольку в устройстве отсутствует постоянный магнит. Это считается недостатком, но есть и достоинство, поскольку при работе приспособления нет момента стопора.
Стопорящий момент заключается во вращении, создаваемом расположенными на роторе постоянными магнитами. Они притягиваются к статору, а именно к его арматуре при отсутствии в обмотках электрического тока. Зафиксировать этот момент просто — необходимо попытаться рукой повернуть двигатель в отключенном состоянии. При этом обычно слышны щелчки на каждом шаге. Диапазон шага в таком двигателе колеблется в пределах 5−15 градусов.
Зафиксировать этот момент просто — необходимо попытаться рукой повернуть двигатель в отключенном состоянии. При этом обычно слышны щелчки на каждом шаге. Диапазон шага в таком двигателе колеблется в пределах 5−15 градусов.
Гибридные модели
Название свое этот тип приспособлений получил из-за особенности работы, которая предполагает сочетание принципов шагового двигателя с постоянными и переменными магнитами. Обладает хорошими удерживающими и динамическими крутящими моментами. Достоинством прибора считается минимальная величина шага, которая не превышает показатель в 5°. Именно благодаря этому обеспечивается максимальная точность.
Механические части приспособления вращаются гораздо быстрее, чем в других моделях с подобным принципом работы. Часто используются в станках для производства. Главным недостатком такого двигателя считается его высокая стоимость.
Известно, что обычный мотор с 8 обмотками будет иметь по 50 положительных и отрицательных полюсов, но произвести такой магнит невозможно.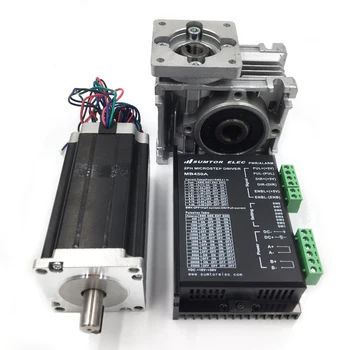 Именно поэтому устройство гибридного двигателя включает в себя 2 магнитных диска, каждый имеет 50 зубцов, а также постоянный магнит цилиндрической формы.
Именно поэтому устройство гибридного двигателя включает в себя 2 магнитных диска, каждый имеет 50 зубцов, а также постоянный магнит цилиндрической формы.
Диски в процессе изготовления прибора привариваются к разным полюсам этого цилиндрического магнита и получается, что один из них на каждом из своих зубьев имеет положительный полюс, а другой — отрицательный. Если смотреть на конструкцию сверху, она выглядит как один диск, имеющий 100 зубьев.
На один оборот такого двигателя приходится 75 шагов, каждый из которых имеет показатель не более, чем 1,5°.
Двухфазные моторы
Двухфазный шаговый двигатель очень прост в использовании, установить его и настроить может даже человек без опыта и соответствующих навыков. Приспособление имеет два типа обмотки для катушек:
- Униполярная заключается в установке одной обмотки, а также специального магнитного крана в центре, влияющего на любую фазу. Каждая секция включается для обеспечения необходимого направления магнитного поля. Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
- Биполярные типы моторов имеют только одну обмотку. Электрический ток в нее поступает особенным переломным методом посредством полюса, обеспеченного магнитом. На любую фазу приходится два разных провода. Устройство несколько сложнее, чем в униполярных моделях, но эффективность выше.
 Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
Другие типы устройств
Главная особенность реактивных приспособлений — маленький шаг, который достигает не более 1°, а также расположение зубцов, находящихся на полюсах статора. Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Для изготовления такого прибора понадобится специальный коммутатор, поэтому стоимость его высока. Самостоятельное создание также исключается по причине сложности конструкции.
Синхронные линейные шаговые моторы используются в случае, когда необходимо автоматизировать производственный процесс. Для этого следует обеспечить перемещение объектов в плоскости. С этой целью применяется специальный преобразователь, который изменяет вращательное движение на поступательное. Достичь этого можно путем использования кинематики.
Именно с этой целью и применяется линейный двигатель, преобразующий импульсы в перемещение по одной линии. Помимо автоматизации процесса, приспособление упростит кинематическую схему проводов. В таком приборе статор изготовлен из мягкого магнитного металла, а также имеется постоянный магнит. Стабильная работа двигателя осуществляется при условии постоянной подачи импульсов на обмотки.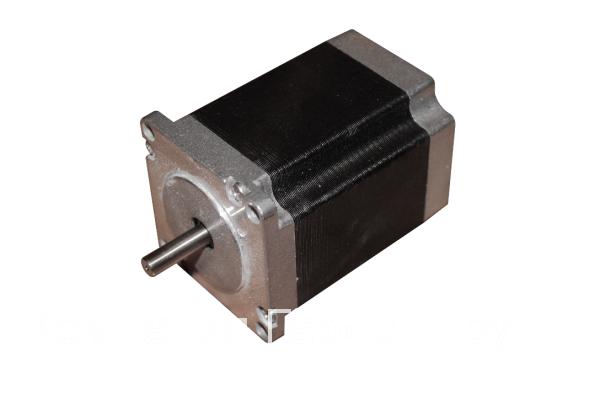
Шаговые моторы — универсальные приспособления, обеспечивающие бесперебойное функционирование множества электрических приборов и производственного оборудования.
Шаговая частота вращения и частота импульсов
Так как частота вращения у ШД фактически представляет собой количество шагов в единицу времени, вместо термина «частота вращения» в специализированной литературе нередко можно встретить определение «шаговая частота вращения». Перед тем как подключить электродвигатель, об этих нюансах нужно обязательно прочесть.
Так как у большинства шаговых двигателей эта частота равна количеству управляющих импульсов, не стоит удивляться необычному ее обозначению в технических справочниках. Точнее, для подобных моторов единицей измерения нередко является герц (Гц).
При этом важно понимать, что шаговая частота вращения реального числа оборотов ротора двигателя ни в коем случае не отражает. Специалисты считают, что нет никакой причины не использовать в описании шаговых двигателей все то же количество оборотов в минуту, которое применяется при описании технических характеристик обычных электродвигателей.
Соотношение между реальной частотой вращения и ее шаговым аналогом вычисляется по следующей формуле:
n = 60f/S, где n – частота вращения, выражается в оборотах в минуту; f – шаговая частота вращения; S – число шагов.
Понравилась статья? Расскажите друзьям:
Оцените статью, для нас это очень важно:
Проголосовавших: 1 чел.
Средний рейтинг: 5 из 5.
Шаговые двигатели для 3D принтеров
Что такое шаговый двигатель
Шаговый двигатель — это бесколлекторный электродвигатель постоянного тока, который преобразовывает электрические импульсы в поворот вала на определенный угол.
В отличие от обычного двигателя, ротор шагового двигателя вращается дискретно (шагами). И полный оборот ротора состоит из нескольких шагов.
Соответственно изменяя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно изменять скорость и направление вращения двигателя.
Типы шаговых двигателей
Существует много разновидностей шаговых двигателей.
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
Наиболее распространенные – гибридные шаговые двигатели.
В зависимости от конфигурации обмоток униполярными и биполярными.
- Униполярные шаговые двигатели. Особенность — наличие отпайки из средней точки, что позволяет с легкостью менять полюса. Минус состоит в применении части витков, поэтому уменьшается момент вращения. Для повышения мощности средний вывод подключать не рекомендуется.
Конструктивно униполярные устройства содержат пять и шесть выводов. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, или 6 выводов в случае если выводы о1 и о2 разъединены (как на схеме). Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.
Одним из самых распространенных примеров униполярного шагового двигателя с пятью выводами может быть шаговый двигатель RKP-28BYJ-48-5V.
Биполярные шаговые двигатели. К этой группе относится шаговый двигатель, подключаемый к контроллеру через четыре отпайки. Обмотки могут объединятся в параллель или последовательно. Для изменения направления тока применяются так называемые чипы, обеспечивающие ручное управление. Достижение такого эффекта доступно с помощью Н-моста. Если сравнивать с униполярным видом, биполярный тип гарантирует тот же момент, но при меньших размерах.
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т. д. шагов за 1 такт.
 д. шагов за 1 такт.
д. шагов за 1 такт.
Угловой шаг
Большинство моделей шаговых двигателей имеет 200 шагов на оборот, т.е. 1.8° на шаг. Кроме этого производятся двигатели с шагом в 0.9°(400 шагов на оборот). Использование микрошагового режима, позволяет делить шаг без потери точности на 8-16 микрошагов. Некоторые модели драйверов, могут делить шаг на 256 (драйвер TMC2209-UART) и даже 512 микрошагов (драйвер RKP-DM860H). Но практическое значение таких делений невелико — во-первых, для совершения каждого микрошага требуется подать отдельный импульс STEP, соответственно, требуется очень высокая частота импульсов, во-вторых, точность перестает расти уже после деления шага на 10-16 частей. Основным применением таких режимов остается повышение плавности хода двигателя.
В машиностроении наибольшее распространения на сегодняшний день получили гибридные шаговые двигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шагов на оборот).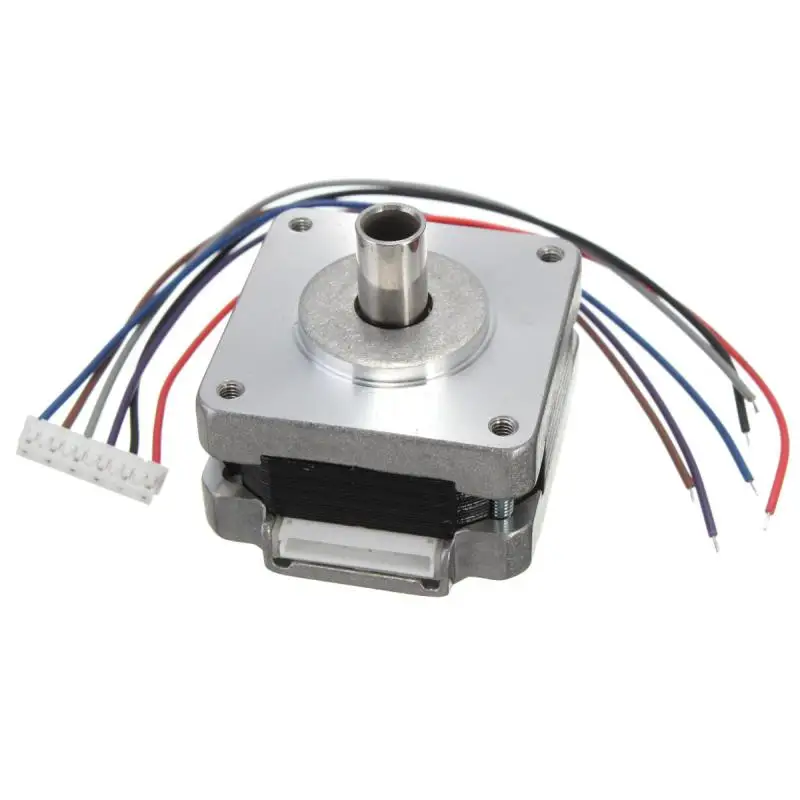
Классификация шаговых двигателей
Шаговые двигатели стандартизованы по посадочным размерам и размеру фланца: NEMA 14, NEMA 16, NEMA 17, NEMA 23, NEMA 34 и др.
Например, NEMA23 имеют размер корпуса 2,3 дюйма (57 мм) и могут создавать крутящий момент до 30 кгс⋅см.
При этом длина корпуса может изменяться от двигателя к двигателю в рамках одного размера. С увеличение длины корпуса увеличивается и крутящий момент двигателя.
NEMA14 (Например: Nema14-14HY0007-20)
- Габаритные размеры: 35х35 мм
- Диапазон длин: 26 — 36 мм
NEMA16 (Например: Nema16-FL39ST38-0504A)
- Габаритные размеры: 39х39 мм
- Диапазон длин: 20 — 30 мм
NEMA17 (Например: Nema17-17HS1011-20B, Nema17-60mm-6kg, Nema17-40mm-DS, Nema17-60mm-DS)
- Габаритные размеры: 42х42 мм
- Диапазон длин: 25 — 60 мм
NEMA23 (Например: Nema23-56mm-12kg-6, Nema23-50mm-DS-8)
- Габаритные размеры: 56х56 мм
- Диапазон длин: 41 — 76 мм
NEMA34 (Например: Nema34-150mm-130kg)
- Габаритные размеры: 86х86 мм
- Диапазон длин: 65 — 156 мм
Драйвер шагового двигателя
Сложная схема управления шаговым двигателем требует специального электронного устройства – драйвера шагового двигателя.
Драйвер — это элемент схемы, предназначенный для управления обмотками мотора путем подачи цифровых сигналов.
Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Тип двигателя является самым важным фактором при выборе драйвера.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.

Задача драйвера – изменять ток в обмотках как можно более эффективно.
По способу закачки тока в обмотки на сегодняшний момент наиболее популярны ШИМ-драйверы шаговых двигателей.
Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода.
ШИМ-драйверы могут сильно отличаются друг от друга по электрическим характеристикам, параметрам управления, размерам и техническим характеристикам.
Электрические характеристики включают в себя максимальное напряжение на входе, номинальную мощность, силу тока на выходе, максимальная сила тока на выходе, питание переменным и постоянным током.
Помимо этого у драйверов отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц.
Если производитель шагового двигателя указал напряжение для обмотки (как правило, оно весьма мало, порядка 1-5 В), то максимальное напряжение для драйвера рассчитывается Umax = U*25. То есть превышение номинального напряжения более чем в 23-25 раз может привести к перегреву двигателя и выходу его из строя!
Если номинальное напряжение питания обмоток не известно. Максимальное питающее напряжение двигателя можно определить исходя из индуктивности.
Umax = 32 * √L , где L — индуктивность обмотки в мГн.
Мощность, потребляемую двигателем, можно оценить, перемножив полученное в расчетах максимальное напряжение питания на 2/3 от номинального тока двигателя. Например, 32*sqrt(2.4 мГн) * 2/3 * 3 А = примерно 100 Ватт.
Формула дает приблизительную оценку. В реальности потребление много ниже, и составляет примерно: двигатели серии 57 мм — 40-70 ватт, двигатели 86 серии — 65-120 ватт на двигатель, в зависимости от нагрузки, выставленного тока на драйверах и т. п.
п.
Так же желательно, что бы драйвер имеет защиту от обратной индуцированной шаговыми двигателями ЭДС.
Подбор драйвера
Для того, что бы узнать подходит ли драйвер для шагового двигателя необходимо:
- Проверить, может ли драйвер выдавать ток фазы, равный (или примерно равный) току, указанному производителем двигателя. Если ток драйвера заметно меньше тока фазы двигателя — драйвер не подходит.
- Проверить максимальное напряжение питания двигателя. Желательно, чтобы максимально допустимое напряжение питания драйвера было примерно равно этому значению, или было немного больше. Если это условие не выполняется, то скорее всего двигатель вращаться будет, но больших скоростей достичь не удастся.
Шаговые двигатели, драйверы шаговых двигателей, контроллеры шаговых двигателей и шаговые двигатели с регулированием скорости
Информация о продукте
Решения
Техническая информация
Размер двигателя
Загрузки
Виртуальный выставочный зал
Свяжитесь с нами
αSTEP
Шаговые двигатели
Бесщеточные двигатели постоянного тока
Серводвигатели
Редукторные двигатели переменного тока
Линейные приводы
Поворотные приводы
Сетевые продукты
Вентиляторы охлаждения
Бесплатная доставка для онлайн-заказов. Принять условия.
Принять условия.
Шаговые двигатели
Шаговые двигатели позволяют с легкостью выполнять точное позиционирование. Они используются в различных типах оборудования для точного регулирования угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели с компактным корпусом генерируют высокий крутящий момент и идеально подходят для быстрого ускорения и отклика. Шаговые двигатели также удерживают свое положение при остановке благодаря своей механической конструкции. Решения для шаговых двигателей состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Компания Oriental Motor предлагает множество решений для самых разных областей применения:
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции с редуктором, энкодером и электромагнитным тормозом
- Драйверы шаговых двигателей с входом переменного или постоянного тока
- Размеры корпуса от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм)
Подробнее. ..
..
- Шаговые двигатели (только двигатель)
- Драйверы шаговых двигателей
- Шаговые двигатели с регулированием скорости
- Контроллеры
Шаговые двигатели (только двигатель)
Компания Oriental Motor предлагает широкий ассортимент шаговых двигателей, в том числе; Шаговые двигатели AlphaStep с обратной связью, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны с размерами корпуса от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять шаговых двигателей с редуктором, варианты энкодера и тормоза, а также различные обмотки двигателя.
- Шаговые двигатели 0,79–3,54 дюйма (20–90 мм) NEMA 8–NEMA 34 типоразмера корпуса
- Доступны беззазорные, малозазорные и прямозубые шестерни
- Шаговые двигатели с замкнутым контуром AlphaStep, двухфазные шаговые двигатели и пятифазные шаговые двигатели
- Опции энкодера и электромагнитного тормоза
- αSTEP Шаговые двигатели с замкнутым контуром
- 2-фазные шаговые двигатели
- 5-фазные шаговые двигатели
Драйверы шаговых двигателей
Драйверы шаговых двигателей преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.
- Вход переменного или постоянного тока
- Шаговые двигатели с замкнутым контуром AlphaStep, драйверы 2-фазных или 5-фазных шаговых двигателей
- Импульсный вход, встроенный контроллер или EtherNet/IP™, EtherCAT, PROFINET Совместимые версии
- Плата или коробка Тип
- αSTEP Драйверы с обратной связью
- 2-фазные драйверы
- 5-фазные драйверы
EtherNet/IP™ является товарным знаком ODVA
Шаговые двигатели и драйверы для управления скоростью
Система управления скоростью серии SC предлагает простую конфигурацию, состоящую из шагового двигателя, драйвера и программируемого контроллера. Рабочая скорость, время разгона и торможения, рабочий ток могут быть установлены с помощью переключателей драйвера, а простое переключение входа FWD (RVS) в положение ON или OFF обеспечивает простоту управления.
- Генератор импульсов не требуется
- Возможны 2 настройки скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры/сетевые шлюзы
Контроллеры и сетевые шлюзы для использования с системами управления движением.
- Контроллеры для использования с драйверами импульсного входа
- Сетевые преобразователи/шлюзы (связь RS-485)
- EtherCat
- CC-Link
- МЕХАТРОЛИНК
- Контроллеры
- Сетевые шлюзы
Шаговые двигатели и драйверы
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления. Двигатель работает за счет точной синхронизации с импульсным сигналом, поступающим от контроллера к драйверу. Шаговые двигатели с их способностью создавать высокий крутящий момент на низкой скорости при минимальных вибрациях идеально подходят для приложений, требующих быстрого позиционирования на небольшом расстоянии.
Точное позиционирование с точным шагом
Шаговый двигатель вращается с фиксированным углом шага, как секундная стрелка часов. Этот угол называется «базовым углом шага». Oriental Motor предлагает шаговые двигатели с базовым углом шага 0,36°, 0,72°, 0,9° и 1,8°. 5-фазные шаговые двигатели имеют угол шага 0,36° и 0,72°, а 2-фазные шаговые двигатели имеют угол шага 0,9° и 1,8°.
Использование технологии гибридных шаговых двигателей
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничивается в осевом направлении, как шаговый двигатель с постоянными магнитами, а статор питается электромагнитным полем, как шаговый двигатель с переменным сопротивлением. И статор, и ротор многозубчатые.
Гибридный шаговый двигатель имеет аксиально намагниченный ротор, что означает, что один конец намагничен как северный полюс, а другой конец как южный полюс. Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Зубчатые чашки ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Простое управление с помощью импульсных сигналов
Ниже показана конфигурация системы для высокоточного позиционирования. Угол поворота и скорость шагового двигателя можно точно контролировать с помощью импульсных сигналов от контроллера.
Что такое импульсный сигнал?
Импульсный сигнал — это электрический сигнал, уровень напряжения которого постоянно меняется между ON и OFF. Каждый цикл ВКЛ/ВЫКЛ считается как один импульс. Команда с одним импульсом заставляет выходной вал двигателя провернуться на один шаг. Уровни сигналов, соответствующие состояниям ВКЛ и ВЫКЛ напряжения, обозначены как «H» и «L» соответственно.
Количество оборотов пропорционально количеству импульсов
Количество оборотов шагового двигателя пропорционально количеству импульсных сигналов (число импульсов), подаваемых драйверу. Соотношение вращения шагового двигателя (угол поворота выходного вала двигателя) и числа импульсов выражается следующим образом:
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоте импульсов), подаваемых на драйвер. Соотношение частоты импульсов [Гц] и скорости двигателя [об/мин] выражается следующим образом:
Соотношение частоты импульсов [Гц] и скорости двигателя [об/мин] выражается следующим образом:
Создание высокого крутящего момента в компактном корпусе
Шаговые двигатели генерируют высокий крутящий момент в компактном корпусе. Эти особенности обеспечивают превосходное ускорение и реакцию, что, в свою очередь, делает эти двигатели подходящими для приложений с высокими требованиями к крутящему моменту, когда двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в большем крутящем моменте на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Двигатель удерживает себя в остановленном положении
Шаговые двигатели продолжают генерировать удерживающий момент даже в состоянии покоя. Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
После отключения питания крутящий момент самоудержания двигателя теряется, и двигатель больше не может удерживаться в остановленном положении при вертикальных операциях или при приложении внешней силы. В лифтах и подобных устройствах используйте тормоз электромагнитного типа.
В лифтах и подобных устройствах используйте тормоз электромагнитного типа.
Шаговые двигатели и драйверы с замкнутым контуром — AlphaStep
AlphaStep состоит из шагового двигателя и драйверов, разработанных для максимального использования возможностей шагового двигателя. Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выдавать сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Узнайте больше о наших продуктах AlphaStep
Типы операционных систем
Каждый шаговый двигатель и драйвер сочетают в себе шаговый двигатель различных типов со специальным драйвером. Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.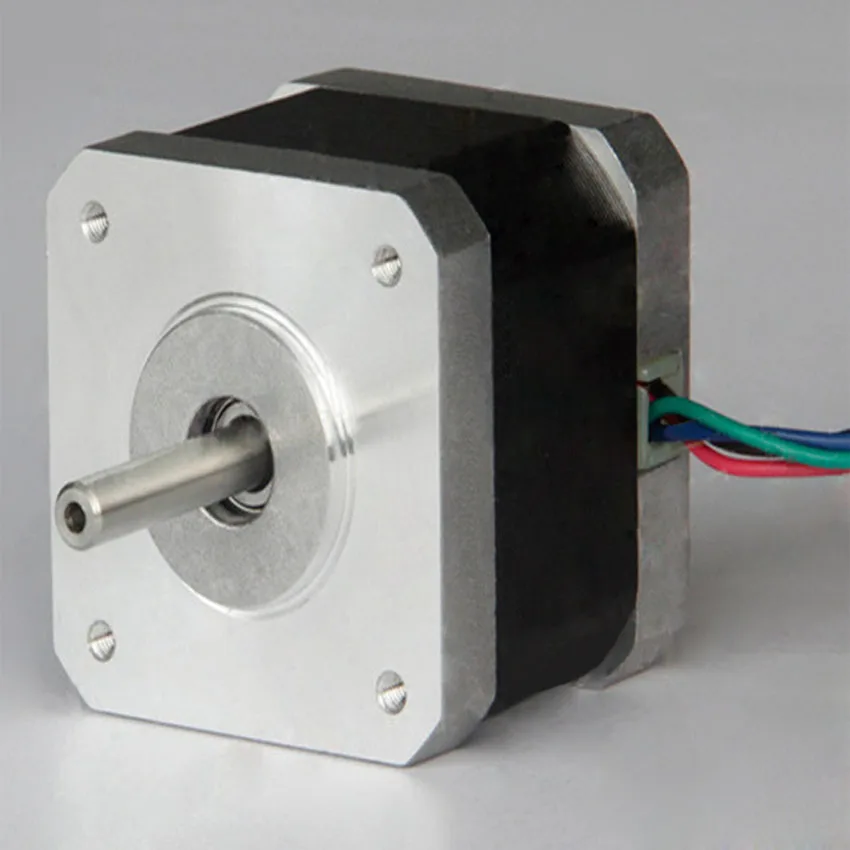
Драйвер импульсного входа
Двигатель может управляться с помощью генератора импульсов, предоставленного пользователем. Рабочие данные вводятся в генератор импульсов заранее. Затем пользователь выбирает рабочие данные на главном программируемом контроллере, затем вводит рабочую команду.
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет управлять двигателем с помощью непосредственно подключенного персонального компьютера или программируемого контроллера. Так как не требуется отдельного генератора импульсов, драйверы этого типа экономят место и упрощают проводку.
Разница между входными характеристиками переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и приводных системах на 100–115 В переменного тока вход выпрямляется до постоянного тока, а затем на двигатель подается примерно 140 В постоянного тока (некоторые продукты являются исключением из этого правила).
Эта разница в напряжении, подаваемом на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает подачу номинального тока на более высоких скоростях. Таким образом, двигатель переменного тока и система драйвера имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких скоростей, предлагая большое передаточное число.
Рекомендуется, чтобы для вашего приложения рассматривались системы двигателя и драйвера с входом переменного тока, которые совместимы в более широком диапазоне условий эксплуатации, чем системы с входом постоянного тока.
- Поиск по артикулу
- Слайд с содержанием
- Слайд с содержанием
Как работает шаговый двигатель? – Интеллектуальные решения для дома
Шаговый двигатель — это бесщеточный двигатель постоянного тока , который преобразует электрические импульсы в механическое движение. Каждый импульс представляет собой поворот РОТОРА (подвижной части двигателя) на небольшой угол ( шаг ). Например, если степпер имеет 200 шагов на оборот, то после подачи 50 импульсов он сделает четверть оборота. Частота и последовательность влияют на направление вращения и его скорость.
Каждый импульс представляет собой поворот РОТОРА (подвижной части двигателя) на небольшой угол ( шаг ). Например, если степпер имеет 200 шагов на оборот, то после подачи 50 импульсов он сделает четверть оборота. Частота и последовательность влияют на направление вращения и его скорость.
Введение
Шаговые двигатели часто используются в устройствах, требующих высокой точности. Вы можете найти их в фрезерных станках с ЧПУ, 3D-принтерах, роботах на фабриках, сканерах или CD/DVD-приводах (если вы достаточно взрослый, чтобы помнить это 🙂). Степперы — это действительно благодарные и приятные устройства, которые обязательно найдут место во многих ваших проектах. Их также очень легко контролировать, как я постараюсь показать вам в этой статье.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой бесщеточный двигатель постоянного тока. Как я упоминал ранее, он питается от электрических импульсов, которые преобразуются во вращательное движение. Вращение не плавное, как у классических двигателей постоянного тока. Полный поворот на 360 градусов состоит из определенного (в зависимости от конструкции) количества шагов. Это позволяет валу вращаться точно без какой-либо обратной связи. Так что энкодер не нужен.
Вращение не плавное, как у классических двигателей постоянного тока. Полный поворот на 360 градусов состоит из определенного (в зависимости от конструкции) количества шагов. Это позволяет валу вращаться точно без какой-либо обратной связи. Так что энкодер не нужен.
В мире хобби наиболее популярны шаговые двигатели с 200 шагами на 360°. Это означает, что вал (ротор) будет поворачиваться на 1,8° каждый раз, когда мы подаем импульс (360° / 200 = 1,8°).
Направление вращения и его скорость в зависимости от последовательности и частоты импульсов.
Как устроен шаговый двигатель?
Шаговый двигатель, как и классический двигатель постоянного тока, состоит из РОТОРА и СТАТОРА . Статор является неподвижной частью, а ротор, установленный на двух подшипниках, вращается с помощью магнитного поля. Статор – из стали или другого металла, представляет собой каркас для набора электромагнитов, которые представляют собой катушки, установленные в определенных местах вокруг ротора. Когда ток течет по катушкам, вокруг них создается магнитное поле. Отдельные магнитные поля имеют направление и интенсивность в зависимости от интенсивности и направления тока, протекающего через данную катушку.
Когда ток течет по катушкам, вокруг них создается магнитное поле. Отдельные магнитные поля имеют направление и интенсивность в зависимости от интенсивности и направления тока, протекающего через данную катушку.
Типы шаговых двигателей
Шаговые двигатели можно разделить по конструкции статора и ротора, которая влияет на преобразование импульсов в движение. И из-за способа соединения катушек.
Я опишу эти два фактора отдельно, так как они совершенно не зависят друг от друга. Любой тип соединения может использоваться с любым типом двигателя.
В зависимости от конструкции различают:
- Шаговый двигатель с переменным сопротивлением
- Шаговый двигатель с постоянными магнитами
- Гибридный шаговый двигатель
По способу намотки различают:
- Униполярный шаговый двигатель
- Биполярный шаговый двигатель
Как работает шаговый двигатель?
Каждый тип работает немного по-разному, поэтому я опишу их отдельно.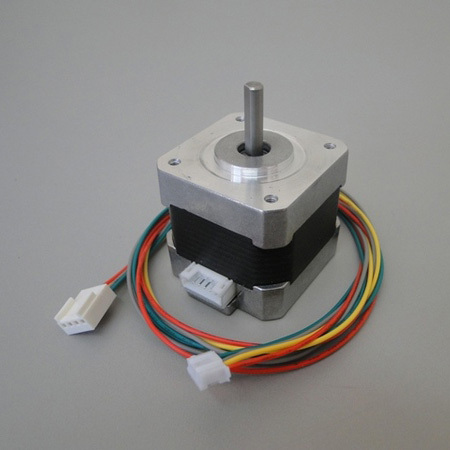 Пуск с двигателем с переменным сопротивлением.
Пуск с двигателем с переменным сопротивлением.
Шаговый двигатель с переменным сопротивлением
Двигатели этого типа не имеют хороших параметров и были вытеснены из отрасли другими типами шаговых двигателей. Расскажу о них в ознакомительных целях. И чтобы помочь вам понять общий принцип работы.
ПОЛНЫЙ ШАГ
Сопротивление также известно как магнитное сопротивление. Если мы поместим проводник в магнитное поле электромагнита, он будет притягиваться. Чем ближе он подходит, тем меньше будет сопротивление.
На анимации показан пример шагового двигателя с переменным сопротивлением и четырьмя катушками. Они намотаны попарно и на противоположных сторонах статора. Это дает нам восемь полюсов. Ротор сделан из некоторого проводника, и количество плеч отличается от количества катушек. Поскольку направление полюса в данном случае не имеет значения, я решил его не отмечать.
Как видите, при подаче питания на соответствующую пару катушек ближайшие плечи ротора притягиваются больше всего. Таким образом, будет сделан один шаг. In the case of this stepper, it will be:
Таким образом, будет сделан один шаг. In the case of this stepper, it will be:
6 arms * 4 coils = 24 steps
360 ° / 24 steps = 15°
15° is ПОЛНЫЙ ШАГ для данного шагового двигателя. Звучит не очень впечатляюще, я знаю.
ПОЛУШАГ
К счастью, увеличить разрешение можно очень легко. Чтобы удвоить количество шагов, мы будем использовать ПОЛУШАГ вместо ПОЛНЫЙ ШАГ . Звучит интуитивно, не так ли? 🙂
Для этого нужно изменить последовательность включения катушек. В предыдущем случае мы использовали только одну пару за раз. На этот раз мы будем использовать две соседние пары, чтобы сделать промежуточный шаг. Теперь у нас есть 8 комбинаций (а не 4) активных катушек. Это означает, что мы удвоили разрешение до 9.0253 48 шагов и 7,5° для одного шага.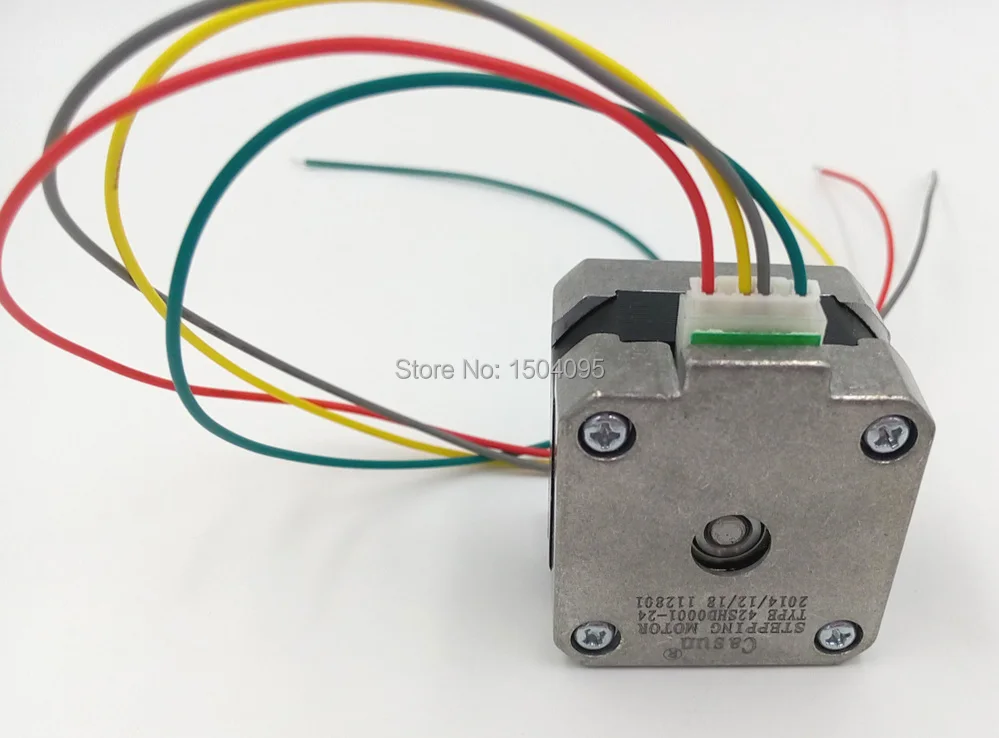
Якобы картинка говорит больше, чем миллион слов, поэтому я думаю, что простая анимация объяснит это еще лучше.
МИКРОШАГ
Но это еще не конец! Мы можем увеличить разрешение еще больше. Для этого нам нужно иметь возможность регулировать ток, протекающий через катушки. Чтобы его можно было запитать, например, вдвое меньшим током. Благодаря этому мы удваиваем количество возможных состояний по сравнению с ПОЛУШАГ метод. Снова анимация 🙂
Теперь у нас есть 96 шагов и 3.25° на один шаг.
Таким образом, мы можем увеличивать разрешение все больше и больше. К сожалению, кроме очевидных достоинств, у него есть и большие недостатки. Чем больше количество микрошагов, тем чаще происходит переключение катушек, следовательно, меньше крутящий момент.
Описанные выше методы управления (ПОЛНЫЙ, ПОЛОВИННЫЙ и МИКРОШАГ) основаны на шаговом двигателе с переменным сопротивлением, поскольку он самый простой. Тем не менее, он будет работать таким же образом для любого последующего типа. Следовательно, для с постоянным магнитом и гибридным шаговым двигателем , я опишу только метод FULL STEP .
Тем не менее, он будет работать таким же образом для любого последующего типа. Следовательно, для с постоянным магнитом и гибридным шаговым двигателем , я опишу только метод FULL STEP .
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами работает за счет взаимодействия полюсов магнитов. Не так, как в предыдущем случае – столб и проводник. Каждый из магнитов имеет два полюса:
С – Север
Ю – Юг
Разные полюса (Ю – С) притягиваются, а одинаковые (С – Ю и Н – Н) отталкиваются друг друга. В результате степперы этого типа имеют гораздо больший крутящий момент.
В отличие от шагового двигателя с переменным сопротивлением, ротор с постоянным магнитом не имеет зубцов. Он построен как бы из нескольких магнитов, попеременно и радиально намагниченных. От их количества зависит разрешение мотора. Однако чем больше этих магнитов, тем они меньше, поэтому меньше взаимодействуют с электромагнитами в статоре. В результате двигатель имеет меньший крутящий момент.
В результате двигатель имеет меньший крутящий момент.
В следующем простом примере используется ротор с шестью магнитными полюсами. С двумя полюсами электромагнитов это дает 12 ПОЛНЫХ ШАГОВ за оборот. В реальном мире двигатели этого типа имеют 24 или даже 48 ступеней.
Гибридный шаговый двигатель
Гибридные шаговые двигатели в настоящее время являются наиболее популярным типом, особенно в промышленности. Они сочетают в себе преимущества двигателей с постоянными магнитами и двигателей с переменным сопротивлением. Благодаря этому у них лучшие параметры, такие как крутящий момент и разрешение. Разрешение типичного гибридного степпера составляет от 0,9° до 3,6°, что дает 100-400 ПОЛНЫХ ШАГОВ за оборот (и давайте не будем забывать, что мы также можем применить МИКРОШАГИ тоже).
Ротор изготовлен из постоянных магнитов, однако, в отличие от описанного выше двигателя, магниты размещены аксиально, а не радиально. Кроме того, как вы можете видеть на картинке, ротор разделен на два (иногда четыре) кольца. У каждого из них есть маленькие зубы. Чем их больше, тем больше разрешение.
Кроме того, как вы можете видеть на картинке, ротор разделен на два (иногда четыре) кольца. У каждого из них есть маленькие зубы. Чем их больше, тем больше разрешение.
Зубья на обоих концах (кольцах) ротора сдвинуты на ползуба. У статора тоже есть зубья, но они на одной линии. Благодаря этому, когда зубья одного кольца имеют разные полюса и притягиваются друг к другу, то зубья второго кольца (имеющего тот же полюс, что и катушка) будут точно между ними. Это улучшает характеристики двигателя и увеличивает его крутящий момент.
РОТОРСТАТОР
Статор такого двигателя обычно имеет две катушки и восемь полюсов. После подачи питания на одну катушку два противоположных полюса будут СЕВЕР , а два — ЮГ . Затем ротор будет вращаться, чтобы выровнять его намагниченные зубья с разными ( S и N ) полюсами статора.
Поскольку ротор имеет два кольца с разными полюсами, на каждом шаге его «удерживают» четыре катушки, что увеличивает его крутящий момент.
Ротор этого шагового двигателя имеет 50 зубьев, и для поворота на одно деление требуется ровно 4 шага. Таким образом, легко подсчитать, что ротору нужно сделать 200 шагов, чтобы совершить оборот. Что составляет 1,8° на шаг ( ПОЛНЫЙ ШАГ ).
Униполярные и биполярные шаговые двигатели
Термины униполярный или биполярный шаговый двигатель не совсем точны. Это относится не ко всему двигателю, а только к обмотке его катушек. Хотя на практике очень часто можно четко определить, является ли данный степпер однополярным или двухполярным . Но вы также можете встретить шаговый двигатель, который может быть как: «bi» , так и «uni» . Вам решать, как вы хотите относиться к нему.
Поэтому для дальнейших рассуждений предположим, что речь идет о шаговом методе управления, а не о его типе.
Биполярный шаговый двигатель
Биполярный шаговый двигатель имеет четыре провода. Они работают с двумя обмотками, полностью изолированными друг от друга.
Они работают с двумя обмотками, полностью изолированными друг от друга.
Этими шаговыми двигателями довольно сложно управлять. Потому что, чтобы изменить магнитный полюс, мы должны изменить направление тока, протекающего в обмотке. И делается это двумя Н-мостами (восемь транзисторов).
Но на этом недостатки заканчиваются, а дальше одни достоинства 🙂
Мы можем использовать всю длину катушки в каждой фазе, что дает высокий крутящий момент. Кроме того, их конструкция достаточно проста.
Униполярный шаговый двигатель
Униполярный шаговый двигатель имеет пять проводов. Они работают с одной обмоткой с центральным отводом на фазу. Общий провод ( COM ) постоянно соединен с землей (чаще всего). Мы можем обратить магнитное поле, поставив разъемы A или A’ ( B или B’ ).
Благодаря такой конструкции для управления этим двигателем достаточно четырех транзисторов (а не восьми, как в биполярных шаговых двигателях).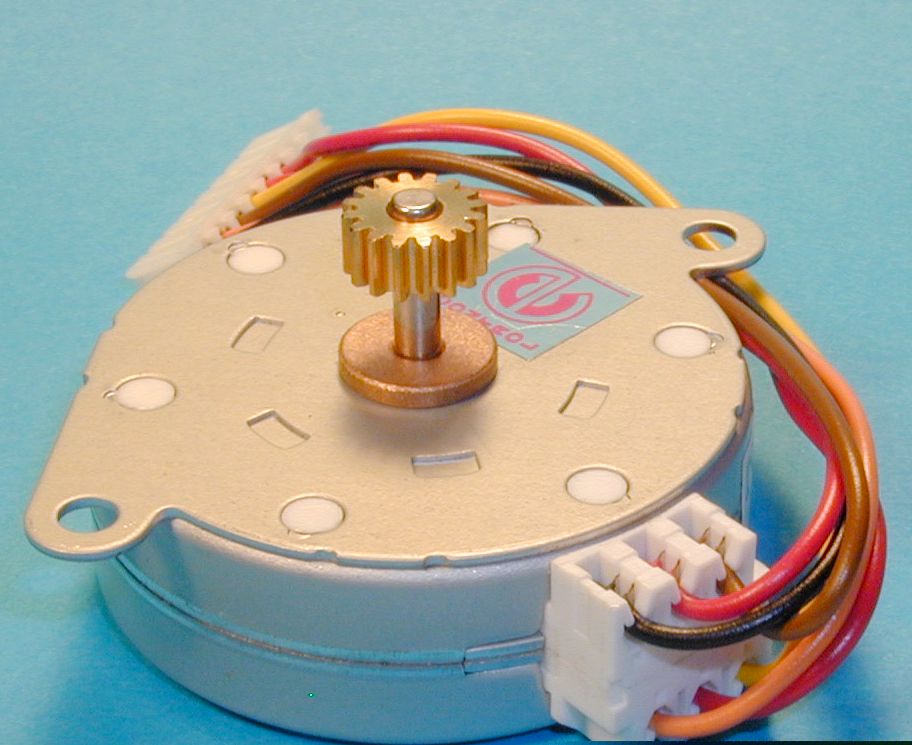
Но поскольку мы можем использовать только половину катушки в каждой фазе, эти шаговые двигатели имеют относительно низкий крутящий момент.
Биполярный или униполярный шаговый двигатель
Этот тип шагового двигателя имеет шесть проводов. Как вы можете видеть на картинке, это комбинация униполярных и биполярных двигателей. Он имеет две обмотки, отделенные друг от друга, но они разделены пополам и выведены в виде двух дополнительных проводов. Это решение позволяет управлять обоими способами. Вам решать, предпочитаете ли вы больший крутящий момент или более простое управление.
Что нужно учитывать при выборе шагового двигателя?
Недостатки
- скорость шаговых двигателей не очень впечатляет – от нескольких до десятка оборотов в секунду
- с увеличением скорости его удерживающий момент (Нм) уменьшается
- относительно высокое энергопотребление
- высокий нагрев эмиссия
- при слишком высокой нагрузке возможны пропуски шагов
Преимущества
- высокая точность позиционирования, без обратной связи
- простота управления – количество импульсов определяет положение вала, а частота определяет скорость
- возможность работы на низких скоростях (не нужны передачи)
- срок службы шаговых двигателей достаточно долгий, благодаря отсутствие фрикционных элементов
Резюме
В этой статье я не рассмотрел все типы шаговых двигателей.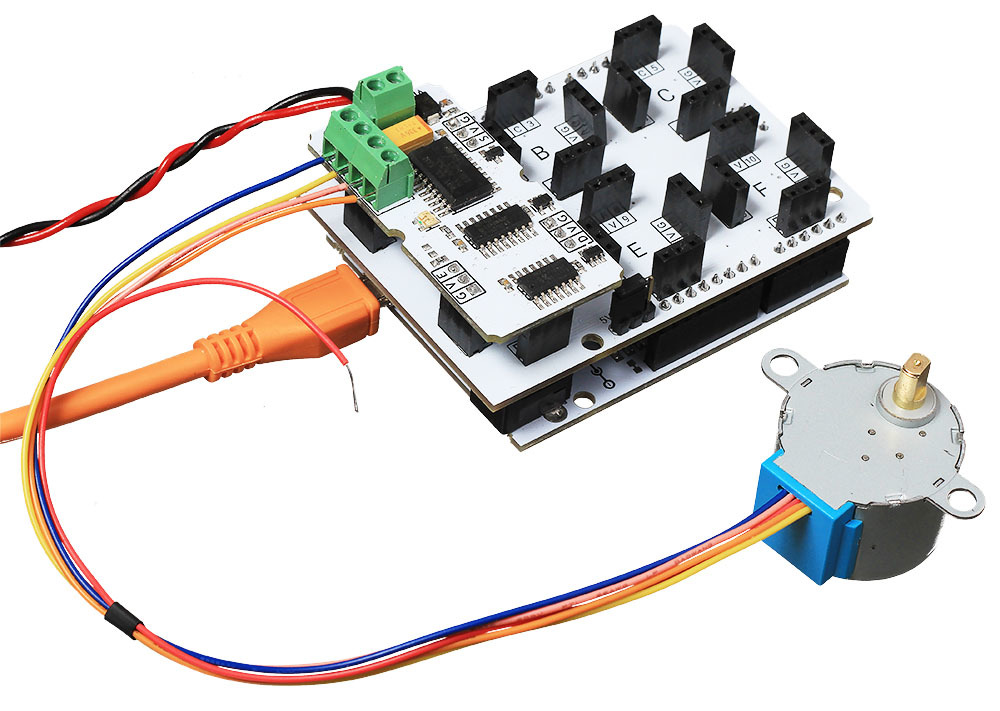 Но их так много, что я мог бы написать книгу. И я предполагаю, что вы здесь, потому что просто хотели узнать, как работают эти двигатели. Поэтому я сосредоточился только на самых популярных типах, которые вы можете встретить ежедневно.
Но их так много, что я мог бы написать книгу. И я предполагаю, что вы здесь, потому что просто хотели узнать, как работают эти двигатели. Поэтому я сосредоточился только на самых популярных типах, которые вы можете встретить ежедневно.
Надеюсь, эти знания пригодятся вам при выборе шагового двигателя для вашего следующего проекта 🙂
Статьи по теме
Как работает ССР? — Полное иллюстрированное руководство
ТТР (твердотельное реле) — это полупроводниковый переключатель. Используя …
Как управлять переменным напряжением с помощью микроконтроллера?
Для контроля напряжения переменного тока (обычно сети переменного тока) с помощью микроконтроллера, …
Как работает триак? — Полное иллюстрированное руководство
Симистор — это полупроводниковый компонент, который можно рассматривать как …
Шаговые двигатели | Прикладное движение
Что такое шаговый двигатель?
Шаговый двигатель определяется как устройство, нормальное движение вала которого состоит из дискретных угловых перемещений практически одинаковой величины при работе от последовательно переключаемого источника питания постоянного тока.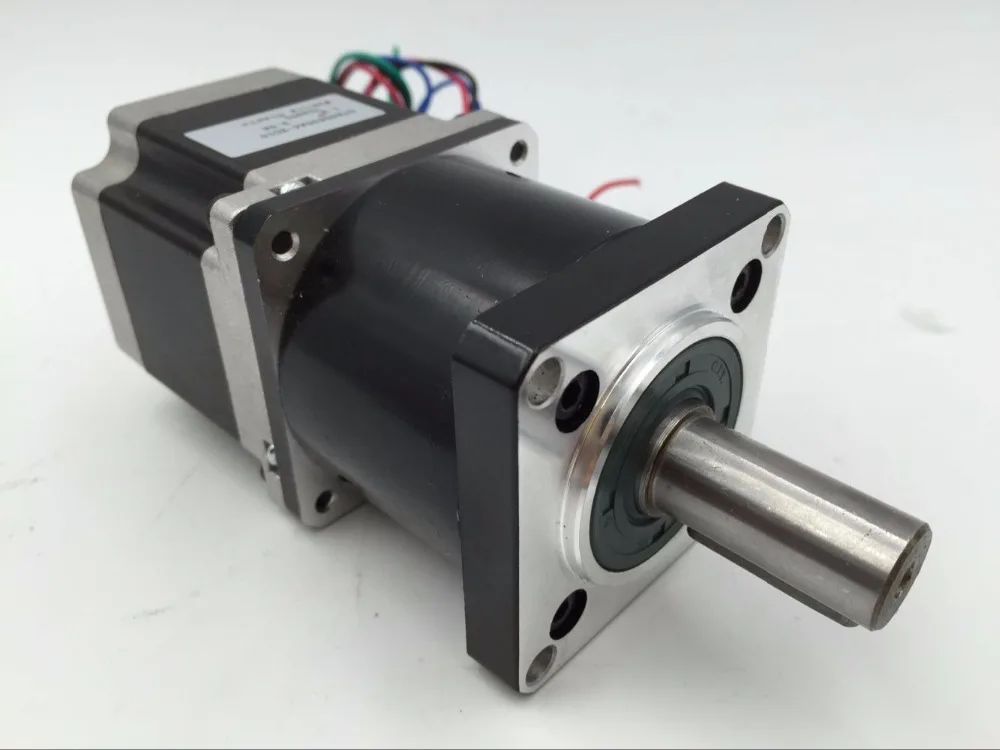
Шаговый двигатель представляет собой цифровое устройство ввода-вывода. Он особенно хорошо подходит для приложений, в которых управляющие сигналы представлены в виде цифровых импульсов, а не аналоговых напряжений. Один цифровой импульс на привод шагового двигателя или транслятор заставляет двигатель увеличивать угол движения на один точный угол. По мере увеличения частоты цифровых импульсов шаговое движение превращается в непрерывное вращение.
Типы шаговых двигателей
Существует три основных типа шаговых двигателей, хотя в промышленной автоматизации наиболее распространенным типом является гибридный тип:
- Активный ротор: постоянный магнит (PM)
- Реактивный ротор: переменное сопротивление (VR)
- Комбинация PM и VR: гибрид (HY)
Applied Motion Products в основном предлагает шаговые двигатели гибридного типа с углом шага 1,8°.
Тип с постоянным магнитом
Этот тип шагового двигателя имеет ротор с постоянным магнитом. Статор может быть аналогичен статору обычного 2- или 3-фазного асинхронного двигателя или иметь конструкцию, аналогичную штампованному двигателю. Последний тип является наиболее популярным.
Статор может быть аналогичен статору обычного 2- или 3-фазного асинхронного двигателя или иметь конструкцию, аналогичную штампованному двигателю. Последний тип является наиболее популярным.
A) Обычный тип с постоянными магнитами. На рис. 1 показана схема обычного шагового двигателя с ротором на постоянных магнитах. Показана двухфазная обмотка. На рис. 1а показана фаза А, на которую подается напряжение с положительной клеммой «А». Поле находится под углом 0°. Когда катушка намотана, как показано, северный полюс ротора также находится под углом 0°. Ступени двигателя указаны в Таблице I.
ТАБЛИЦА I
| Ступень | Положение Ротор и Вал | (Mechanical Degrees) Electromagnetic Field | Energization | Figure | |||
| phase | phase | ||||||
| A | A’ | B | B’ | ||||
| 0 | 0 | 0 | + | — | off | off | 1a |
| 1 | 90 | 90 | off | off | + | — | 1b |
| 2 | 180 | 180 | — | + | off | off | 1c |
| 3 | 270 | 270 | off | off | — | + | 1d |
Вал совершает один оборот на каждый полный оборот электромагнитного поля в этом двигателе.
На рис. 2 показан тот же двигатель с обеими обмотками под напряжением. Важным отличием здесь является то, что результирующее электромагнитное поле находится между двумя полюсами. На рис. 2 поле сместилось на 45° относительно поля на рис. 1. В таблице II показана последовательность включения питания и положения ротора.
TABLE II
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Energization | Figure | |||
| phase | phase | ||||||
| A | A | Б | Б’ | ||||
| 0 | 45 | 45 | + | — 9 5 570 | + | + | 1 2a |
| 1 | 135 | 135 | — | + | + | — | 2b |
| 2 | 225 | 225 | — | + | — | + | 2c |
| 3 | 315 | 315 | + | — | — | + | 2d |
As in the one-phase-on energizing scheme, the shaft completes one оборот за каждый полный оборот электромагнитного поля.
Должно быть очевидно, что этот двигатель может работать на полшага; т. е. шаг с небольшим шагом. Это возможно путем объединения подачи питания, показанной на рис. 1, с показанной на рис. 2. На рис. 3 показаны схемы двигателя с полушаговым движением ротора. Последовательность включения и положение ротора показаны в таблице III.
ТАБЛИЦА III
| Шаг | Положение Ротор и Вал | (Механические градусы) Электромагнитный Field | Energization | Figure | |||
| phase | phase | ||||||
| A | A’ | B | B’ | ||||
| 0 | 0 | 0 | + | — | off | off | 3a |
| 1 | 45 | 45 | + | — | + | — | 3b |
| 2 | 90 | 90 | off | off | + | — | 3c |
| 3 | 135 | 135 | — | + | + | — | 3d |
Как и на предыдущих диаграммах, ротор и вал перемещаются под тем же углом, что и поле. Обратите внимание, что каждый шаг приводил к повороту на 45° вместо 90° на предыдущей диаграмме.
Шаговый двигатель с постоянными магнитами может иметь бифилярную обмотку, чтобы избежать необходимости менять полярность обмотки. На рисунке 4 показана бифилярная обмотка, а в таблице IV показана последовательность подачи питания.
TABLE IV
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Energization | Figure | |||
| phase | phase | ||||||
| A | B | C | D | ||||
| 0 | 0 | 0 | on | off | off | off | 4a |
| 1 | 90 | 90 | off | off | on | off | 4b |
| 2 | 180 | 180 | off | on | off | off | 4c |
| 3 | 270 | 270 | off | off | off | on | 4d |
Bifilar windings are easier to switch using a transistor controller. Требуется меньше переключающих транзисторов.
B) Штамп или шаговый двигатель с постоянными магнитами. Наиболее популярным типом шагового двигателя с постоянными магнитами является так называемый штампованный тип, зубчатый венец, листовой металл, жестяная банка или просто недорогой шаговый двигатель. Этот двигатель трудно четко проиллюстрировать из-за того, как он сконструирован. Вырез на рис. 5 — это попытка показать, как выглядит этот тип шагового двигателя с постоянными магнитами. Двигатель показан с обеими фазами под напряжением. Ротор показан с 12 полюсами, что дает 24 шага на оборот с углом шага 15°. Схематическая диаграмма шагового двигателя с постоянными магнитами того типа, который показан на рисунке 5, показана на рисунке 6. Этот двигатель имеет пару катушек, окружающих ротор с постоянными магнитами. Катушки заключены в корпус из мягкого железа с зубьями внутри, взаимодействующими с ротором. Каждый корпус катушки имеет такое же количество зубцов, как и количество полюсов ротора. Корпуса смещены друг относительно друга в радиальном направлении на половину шага зубьев.
PM step motors are available with the following step angles:
| Step Angle Degrees | Steps Per Revolution |
| 1.8 | 200 |
| 3.6 | 100 |
| 3.75 | 96 |
| 7,5 | 48 |
| 40 | |
| 10 | |
| .0591 32 | |
| 15 | 24 |
| 18 | 20 |
| 22.5 | 16 |
| 30 | 12 |
| 45 | 8 |
| 90 | 4 |
Тип с переменным сопротивлением
Этот тип шагового двигателя имеет электромагнитный статор с ротором из магнитомягкого железа, имеющим зубья и пазы, подобные ротору индукторного генератора переменного тока. В то время как двигатели с постоянными магнитами в основном являются 2-фазными машинами, для двигателей VR требуется как минимум 3 фазы. Большинство шаговых двигателей VR имеют 3 или 4 фазы, хотя доступны и 5-фазные двигатели VR.
Схема трехфазного двигателя VR показана на рис. 7. Показанный двигатель имеет 12 зубьев статора, 8 зубцов ротора и угол шага 15°. The energization sequence is shown in Table V.
TABLE V
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Energization Phase | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| A | B | С | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 0 | 15 | 60 | on | off | off | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 1 | 30 | 120 | off | on | off | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2 | 45 | 180 | off | OFF | ON | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 3 | 60 | 240 | на | OFF | OFF | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Step | Position Rotor & Shaft | (Mechanical Degrees) Electromagnetic Field | Phases | |||
| A | B | C | D | |||
| 0 | 15 | -45 | on | off | off | off |
| 1 | 30 | -90 | off | on | off | off |
| 2 | 45 | -135 | off | off | on | off |
| 3 | 60 | 135 | off | off | off | on |
Обратите внимание на вращение электромагнитного поля. Поле совершает большой скачок во вращении между шагами 2 и 3. Это характерно для двигателя, подключенного таким образом. На рис. 9 показан этот двигатель с двумя фазами, включенными одновременно. Вращение поля остается прежним. Способ исправить это показан на схеме на рисунке 10. Схемы на рисунках 8 и 9 иллюстрируют обмотки, соединенные 4N и 4S. Это указывает на магнитные полюса, когда они находятся под напряжением. Соединение катушки, показанное на рисунке 10, представляет собой симметричное соединение, называемое N-S-N-S из-за полярности катушки. Обратите внимание, что катушка фазы А имеет два южных полюса и не имеет северных полюсов для пути возврата потока. Вы можете быть уверены, что он будет. Поток будет возвращаться по пути наименьшего сопротивления, а именно через пары полюсов, ближайшие к двум зубьям ротора. Это зависит от положения ротора. Поток индуцирует напряжение в катушках, намотанных на полюс. Это индуцирует ток в обмотке, замедляющий ротор. Величина тока определяется напряжением на катушке. Катушка с диодной фиксацией будет иметь больший ток, чем обмотка с резисторным диодом или стабилитроном. На рисунке 11 показана схема 4-фазного шагового двигателя VR с подключением N-S-N-S и двумя фазами, находящимися под напряжением. Обратите внимание на короткий путь потока между полюсами.
Часто необходимо уменьшить угол шага без использования зубчатого зацепления. Один из методов заключается в удвоении количества зубьев ротора и статора. Если бы двигатель был сконструирован так, как показано на рис. 7, зубья были бы тонкими и их было бы трудно заводить. Лучший способ сделать это показан на рисунке 12. Количество полюсов ротора и статора уменьшено.
На рис. 13 показана схема шагового двигателя с переменным сопротивлением с шагом 5°. Диаграмма двигателя VR с шагом 1,8° показана на рис. 14.
Variable reluctance step motors are available with the following step angles:
| Step Angle Degrees | Steps Per Revolution |
| 1. 8 | 200 |
| 5 | 72 |
| 7,5 | 48 |
| 15 | 24 |
Гибридный тип
Этот тип двигателя часто называют двигателем с постоянными магнитами. Он использует комбинацию постоянного магнита и структуры с переменным магнитным сопротивлением. Его конструкция аналогична асинхронному двигателю. На рис. 15 показан упрощенный тип гибридного двигателя, иллюстрирующий его конструкцию. Ротор имеет две концевые детали (хомуты) с выступающими полюсами, расположенными на равном расстоянии друг от друга, но радиально смещенными друг от друга на половину шага зубьев. Их разделяет круглый постоянный магнит. Ярма имеют практически равномерный поток противоположной полярности. Статор изготовлен из многослойной стали. Двигатель, показанный на рисунке 15, имеет 4 катушки, расположенные в две группы по 2 катушки последовательно. Одна пара катушек называется фазой A, а другая — фазой B. Для показанного двигателя каждый полюс имеет один зубец.
Количество полных шагов на революцию может быть определена из следующей формулы:
| SPR = N R X Ø | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| , где: | SPR = № | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| , где: | SPR = № | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| , где: | SPR = number of Step of Step of Step of Step Per Speve Per Speve Per Speve PERELES | N R = общее количество зубьев ротора (всего для обоих хомутов) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Ø = количество фаз двигателя | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| или: N R = SPR/Ø | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| SA = 360/SPR | |
| Где: | |
| Шаг = угол шага 9 дюймов | |
| SPR = шагов на оборот | |
Пример: Вычислите угол шага для приведенного выше двигателя.
SA = 360/20 = 18°
Угол шага можно рассчитать напрямую, не зная количества фаз, если известно количество зубьев статора и зубцов на полюс. На рис. 15 показано по одному зубу на полюс и всего 4 зубца на статоре.
| Formula: | SA = (1/N ST — 1/N RP ) x 360 x N STP | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Where: | SA = step angle in degrees | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| N ST = Количество зубов статора | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| N RP = Количество зубов ротора на полюс или яг | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| N STP = номер Статор. часто изготавливаются с одним или двумя зубьями между каждым полюсом, чтобы облегчить намотку двигателя и уменьшить утечку потока между полюсами. Эта формула требует использования теоретического числа зубьев. Обратите внимание, что и здесь необходимо использовать теоретическое число зубьев. Обычно легко визуально определить, остался ли один или два зуба между полюсами. Пример. Двигатель на Рисунке 15 имеет 5 зубьев на каждой вилке ротора и по одному зубцу на полюс, всего 4 зубца.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||