Содержание
Частотные преобразователи тока | INVT
(495) 663-663-5
многоканальный для Москвы и МО
Заказать звонок
(800) 600-49-09
бесплатный для всех регионов РФ
График работы: Пн — Пт с 9:00 до 18:00
Содержание:
- Классификация преобразователей частоты для асинхронного двигателя
- Как работает преобразователь частоты для асинхронного двигателя?
- Где применяются приборы?
- Схема подключения частотников
Мощные асинхронные двигатели активно используются во многих промышленных отраслях. Для обеспечения плавного запуска таких механизмов применяются частотные преобразователи тока. Эти приборы осуществляют контроль показателей пусковых токов и преобразуют входные сетевые параметры в выходные.
Классификация преобразователей частоты для асинхронного двигателя
Различают несколько разновидностей таких устройств.
- По типу напряжения частотники подразделяются на:
- однофазные;
- трехфазные;
- высоковольтные.
- В зависимости от области использования устройства делятся на:
- Механизмы, предназначенные для эксплуатации на промышленных предприятиях. Мощность частотников этого вида достигает 315 кВт.
- Устройства с векторным управлением. Их мощность может составлять до 500 кВт.
- Частотные преобразователи тока, предназначенные для управления приборами, которые имеют насосно-вентиляторный тип нагрузки.
- Устройства, используемые на подъемных кранах и прочих механизмах такого типа.
- Преобразователи частоты, эксплуатируемые в условиях взрывоопасности.
- Устройства, которые устанавливаются непосредственно на двигатель.
Как работает преобразователь частоты для асинхронного двигателя?
В основе устройства — инвертор с двойным преобразованием. Он функционирует следующим образом:
Он функционирует следующим образом:
- Вначале осуществляется прохождение входного переменного тока с 380 или 220 Вольт через диодный мост, после чего происходит его выпрямление.
- Затем производится его подача на группу конденсаторов. Там он сглаживается и фильтруется.
- После этого ток переходит на управляющие микросхемы и мостовые ключи. Там формируется трехфазная широтно-импульсная последовательность с определенными параметрами.
- На заключительном этапе под воздействием индуктивности обмоток осуществляется преобразование созданных импульсов прямоугольной формы в синусоидальное напряжение.
Схематично принцип работы устройства представлен на картинке:
Где применяются приборы?
Область использования частотных преобразователей весьма обширна. Они применяются в промышленных приборах, для корректной работы которых требуется менять скорость вращения однофазного и трехфазного двигателя, предпринимать меры по борьбе с амплитудными токами и т. д. Среди таких механизмов можно выделить насосы (снижается энергопотребление до 60%, уменьшаются теплопотери до 10%, минимизируется количество аварийных ситуаций на трубопроводах), вентиляторы (уменьшаются энерготраты), транспортеры (обеспечивается плавный запуск устройств, что увеличивать их эксплуатационный ресурс) и т. д. Использование частотников оправдано в работе лифтового оборудования и подъемной техники. В данном случае преобразователи позволяют снизить пусковые и остановочные перегрузки.
д. Среди таких механизмов можно выделить насосы (снижается энергопотребление до 60%, уменьшаются теплопотери до 10%, минимизируется количество аварийных ситуаций на трубопроводах), вентиляторы (уменьшаются энерготраты), транспортеры (обеспечивается плавный запуск устройств, что увеличивать их эксплуатационный ресурс) и т. д. Использование частотников оправдано в работе лифтового оборудования и подъемной техники. В данном случае преобразователи позволяют снизить пусковые и остановочные перегрузки.
Схема подключения частотников
Настройка прибора в данном случае означает подведение кабелей к видимым контактам электродвигателя. Соединение определяется характером напряжения, которое вырабатывается преобразователем частоты. Если сеть трехфазная, осуществляется параллельное подсоединение или схема «звезда». В однофазных сетях используется схема «треугольник».
Пульт управления устройством размещается в наиболее удобном пользователю месте. Перед выполнением подключения рычаг необходимо перевести в положение «выключено». Затем загорается лампочка-индикатор. Для запуска устройства необходимо нажать на пусковую кнопку. Чтобы обороты набирались плавно, нужно аккуратно повернуть рукоятку пульта.
Затем загорается лампочка-индикатор. Для запуска устройства необходимо нажать на пусковую кнопку. Чтобы обороты набирались плавно, нужно аккуратно повернуть рукоятку пульта.
Пример подключения устройства вы можете увидеть на этом видео:
В нашей компании вы можете купить преобразователь частоты для асинхронного двигателя по стоимости, не включающей наценок посредников. Мы открыты для сотрудничества с оптовыми покупателями и предоставляем крупным заказчикам индивидуальные скидки и бесплатную доставку.
Чтобы уточнить цену частотного преобразователя тока малой мощности для однофазного двигателя, обращайтесь по телефонам: +7 (495) 799-8200 (многоканальный для Москвы и МО), +7 (800) 600-4909 (бесплатный для всех регионов РФ).
| Ваш телефон: | |
Поля, отмеченные «*», обязательны для заполнения
| Ваш телефон: | |
Поля, отмеченные «*», обязательны для заполнения
Гарантийные обязательства:
1. Стандартный срок гарантии составляет 36 месяцев со дня выдачи Оборудования Покупателю.
Стандартный срок гарантии составляет 36 месяцев со дня выдачи Оборудования Покупателю.
2. В случае если в течение гарантийного срока вышеупомянутое Оборудование выйдет из строя не по вине Покупателя, поставщик обязуется произвести ремонт или замену дефектного Оборудования без дополнительной оплаты.
3. Гарантийный ремонт и обслуживание производятся в течение 5-ти рабочих дней после предъявления настоящего гарантийного талона, при наличии необходимых запчастей в сервисном центре Продавца Оборудования. Если Продавец не может произвести своевременный ремонт из-за отсутствия необходимых запчастей, то в течение 2-х рабочих дней после сдачи Оборудования Продавец обязан уведомить об этом Покупателя путем отправки ему электронного письма с указанием причины невозможности своевременного ремонта(замены) и указать сроки ремонта. Гарантийный срок продлевается на время проведения ремонта.
С более подробной информацией о гарантийных обязательствах Вы можете ознакомиться, пройдя по ссылке
Частотный преобразователь асинхронного двигателя в промышленности
Хотя еще рано сбрасывать со счетов электропривод постоянного тока, в промышленности и бытовой сфере в практически любых технических системах используется сочетание асинхронного двигателя и преобразователя частоты. Несмотря на очевидные преимущества асинхронного двигателя перед двигателем постоянного тока, его слабой стороной являлась сложность регулирования скорости вращения. В настоящее время данная проблема устранена благодаря современным частотным преобразователям.
Несмотря на очевидные преимущества асинхронного двигателя перед двигателем постоянного тока, его слабой стороной являлась сложность регулирования скорости вращения. В настоящее время данная проблема устранена благодаря современным частотным преобразователям.
ЧТО ТАКОЕ ЧАСТОТНЫЙ ПРЕОРАЗОВАТЕЛЬ
Говоря простым языком — частотный преобразователь – устройство для управления асинхронным двигателем. Возможно регулирование скорости вращения и другими методами — установкой вариатора, редуктора, муфты, но это не позволяет менять скорость в широком диапазоне, усложнят монтаж и не является энергосберегающим решением.
ЗАЧЕМ НУЖЕН ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Частотный преобразователь в случае асинхронных электродвигателей самых различных агрегатах как промышленного, так и потребительского назначения используется для оптимизации управления двигателем, приводящей в итоге к экономии электроэнергии, увеличению срока службы устройства. Использование частотных преобразователей позволяет произвести эффективную, простую и надёжную автоматизацию процесса управления оборудованием.
Основные задачи, которые решает преобразователь частоты, кроме увеличения/уменьшения скорости вращения это:
- Плавный пуск и плавный останов двигателя, что позволяет избежать высоких механических нагрузок на оборудование.
- Уменьшение затрат электроэнергии, что актуально не только для больших промышленных предприятий, но при бытовом использовании в составе насосной станции на даче, например.
- Защита от перегрузки двигателя, что продлевает срок его эксплуатации.
- Сохранение высокого крутящего момента на низких оборотах, что очень важно при тяжелом пуске (например, в составе оборудования дробилок для щебня)
И как говорилось выше, всё, что связано с управлением скоростью вращения – изменяемое или адаптивное вращение (пример: линии конвейера, где вращение может быть задано с непостоянной скоростью). Высокая точность вращения – что важно при использовании на различных обрабатывающих станках.
УСТРОЙСТВО ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
Как на заре появления транзисторных радиоприёмников в народе их стали называть просто “транзисторами”, по названию основного электронного компонента этих устройств, так и название “частотный преобразователь” нельзя считать совсем точным.
На самом деле мы рассматриваем устройство, состоящее из выпрямительного модуля, преобразующего переменный ток на входе в постоянный, и модуля преобразователя частоты, преобразующего полученный на выходе выпрямительного модуля постоянный ток в переменный заданной частоты и амплитуды, возможно ШИМ-модулированный.
Само же это устройство в целом является одним из компонентов электропривода.
ПРИНЦИП РАБОТЫ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
В зависимости от технических деталей принципа управления, частотные преобразователи условно подразделяются на “векторные” и “скалярные”. Первые отличаются в основном более стабильным поддержанием момента вращения двигателя в широком диапазоне частот (числа оборотов).
Скалярное управление наиболее распространено и максимально удовлетворяет требованиям таких механизмов, как насосы, вентиляторы, компрессоры, а также тех, для которых важно поддерживать скорость вращения. Метод довольно прост, но имеет небольшой диапазон регулирования скорости и требует установки дополнительных датчиков для реализации управления по скорости и моменту.
Разнообразие векторных вариантов управления впечатляет, но может быть условно разделено на две группы:
- Управление по вектору тока (довольно простой метод, присущий абсолютному большинству преобразователей)
- Управление по вектору напряжения. Основано на том, что напряжение пропорционально моменту, что позволяет без дополнительных пересчетов получить управление последней характеристикой.
Все остальные методы, по большому счету, являются их дополнением, каждый производитель совершенствует по своему усмотрению расчеты и измерения таких показателей, как индуктивность, намагниченность, вектор электромагнитного поля и т. д.
д.
Собственно детали методов управления являются весьма сложными, а сами методы постоянно совершенствуются. Важным моментом при выборе частотного преобразователя является знание потенциальным потребителем минимальных требований, которые налагает объект управления (вентилятор, насос, конвейер и т.д.). Это позволит с одной стороны не переплачивать за преобразователь с ненужными свойствами, а с другой – не оказаться в ситуации, когда привод, скомпонованный из частотника и асинхронного двигателя, не обеспечивает должное функционирование объекта управления.
ВИДЫ ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЕЛЕЙ
Помимо определения способа управления, который определяется техническими требованиями оборудования и стоимостью частотного преобразователя, необходимо знать мощность и тип подключения к двигателю, то есть количество фаз на входе и выходе.
На предприятиях используется напряжение 380В, соответственно частотник подбирается 3 фазы вход 380В, 3 фазы выход 380В. https://www.technowell.ru/catalog/innovert/trekhfaznye_INNOVERT/chastotnyy-preobrazovatel-innovert-5…
https://www.technowell.ru/catalog/innovert/trekhfaznye_INNOVERT/chastotnyy-preobrazovatel-innovert-5…
Для бытового использования, где напряжение 230В, подходит преобразователь частоты с 1 фазой вход 230, 3 фазы выход 230В. Максимально допустимая мощность таких частотников 3,7 кВт. https://www.technowell.ru/catalog/innovert/odnofaznye_INNOVERT/chastotnyy-preobrazovatel-innovert-2-…
Так же большинство производителей выпускает линейки подготовленные для специального использования, например с вентиляторами: https://www.technowell.ru/catalog/innovert/seriya-dlya-ventilyatsii/chastotnyy-preobrazovatel-innove…
Или насосами: https://www.technowell.ru/catalog/innovert/seriya-dlya-nasosov/trekhfaznye-INNOVERT-IHD/chastotnyy-p… где уже выставлены определенные настройки, характерные при использовании с данным оборудованием.
Преобразователи частоты для асинхронных двигателей
До появления частотных преобразователей на рынке современной энергетики, электромонтёрам приходилось применять для подключения асинхронного двигателя стартовый или фазосдвигающий конденсатор большой ёмкости.
Двигатель при этом работал, но существенно терял мощность. Также, применение конденсаторов сильно разогревало обмотки двигателя, что сильно снижало его ресурс работы, и двигатели часто приходилось «перематывать». Учитывая, что обмотки асинхронного двигателя делаются из медной проволоки, то такие ремонты приносили большой ущерб.
Так как асинхронный двигатель является составной частью почти каждого современного привода, то вопрос создания частотного регулирования вставал на особый уровень. И вот, частотники уже повсеместно применяются для подключения электрического двигателя к сети и его управление.
По сути, частотный инвертор, это прибор, изменяющий частоту поданного на обмотки напряжения с ШИМ-регулированием. Благодаря частотнику, получилось подключить асинхронный двигатель к сети без ущерба его ресурсу, без перегрева, и ещё дать массу возможностей по управлению скоростью вращения вала.
Также, применяя различные интерфейсы передачи данных и команд, применение частотников позволило объединить все приводы большого предприятия в одно диспетчерскую систему управления и контроля параметров.
В мир современной автоматизации технологических процессов, это весомый аргумент.
Устройство частотных преобразователей
Современный частотный инвертер состоит из двух принципиальных блоков. Первый блок полностью сглаживает напряжение и на выходе выдаёт постоянное. Постоянное напряжение подаётся на силовой блок генерации частоты. После преобразования, на выходе из второго блока частота напряжения уже будет такая, какая задана настройкой.
За возможность изменять частоту напряжения отвечает микропроцессор, который встроен в частотник. Используя заданную программу, процессор следит за выходной частотой напряжения, а также за параметрами работы электрического двигателя.
По сути, частотные преобразователи для асинхронных двигателей принцип работы которых заключён в простом вырабатывании нужной частоты переменного тока, это модуляторы нужной природы напряжения, которая необходима для того или иного оборудования. Именно это и снизило негативное влияние на работу электрического двигателя, которое имело место быть при использовании конденсатов.
Электрический двигатель получает именно такое напряжение, которое положено ему для нормальной и полноценной работы.
Считаем нужным отметить, что и при наличии линии трёхфазного напряжения, не всегда рационально подключать электрический двигатель к сети просто через выключатель. В таком случае, двигатель будет работать, но регулировать его работу не получится. Не получится и следить за состоянием обмоток.
В промышленном исполнении можно встретить два основных типа частотных преобразователей:
- Специальные.
- Универсальные.
Специальный частотный преобразователь для асинхронного двигателя, схема которого несколько отличается от универсального, изготавливается под конкретное оборудование по конкретным потребностям. Как правило, это очень урезанные версии, не способные на работу с любым оборудованием.
Универсальные частотные инвертера могут работать, как и в специальном оборудовании, так и во всех остальных вариантах применения. На то они и универсальные, что их можно настраивать и программировать под любые нужды.
Поэтому, выбор частотного преобразователя для асинхронного двигателя должен быть не столько продиктован конкретными необходимостями производства, но и возможностью модернизации оборудования.
Практически во всех частотниках сегодня реализована возможность установки и контроля режима работы электрического двигателя с пульта управления. Первый интерфейс управления встроен в сам корпус частотника. Там же есть и ручка регулирования скорости вращения двигателя.
Но можно и применять выносные пульты управления. Которые можно располагать как в диспетчерской, так и непосредственно на станке, который приводится в движение электрическим двигателем.
Такое чаще встречается в ситуациях, когда станок с двигателем находится в помещении, где не рекомендуется установка частотного инвертора. И его устанавливают вдали от оборудования.
Большая часть инвертеров частоты позволяют программировать работу оборудования. Но, задать программу просто с пульта управления не получится. Для этого используется интерфейс передачи данных и настройки, который, при помощи компьютера позволяет задать нужную программу работы.
Для этого используется интерфейс передачи данных и настройки, который, при помощи компьютера позволяет задать нужную программу работы.
Разница типов сигналов управления
При проектировании цеха очень важно учитывать, что общение частотных преобразователей с диспетчерским пультом будет происходить при помощи электрических импульсов по проводам связи. Пи этом, не стоит забывать, что разные стандарты связи по-разному влияют друг на друга. Посему, переда данных одним способом, может существенно снижать качество передачи данных другим способом.
Поэтому, расчет частотного преобразователя для асинхронного двигателя должен производиться не только по его электротехническим показателям, но и по показателям совместимости с сетью.
Выбор мощности частотного преобразователя
Вопрос мощности частотника, скорее всего, стоит на первом плане, при расчете привода для любого станка или агрегата. Дело в том, что большинство частотных инвертеров способны выдерживать большие перегрузки до 200 – 300 %. Но, это совсем не означает, что для питания электрического двигателя можно смело покупать частотник сегментом ниже, чем требуется по планированию.
Но, это совсем не означает, что для питания электрического двигателя можно смело покупать частотник сегментом ниже, чем требуется по планированию.
Выбор мощности частотного преобразователя осуществляется с обязательным запасом в 20 – 30%. Игнорирование этого правила может повлечь за собой выход из строя частотного преобразователя и простой оборудования.
Также важно учитывать пиковые нагрузки, которые может выдерживать частотник. Дело в том, что при старте электрического двигателя его пусковые токи могут сильно превышать номинальные. В некоторых случаях, пусковой ток превышает номинальный в шесть раз! Частотик должен быть рассчитан на такие изменения.
Каждый электрический двигатель оборудован вентилятором охлаждения. Это лопасти, которые установлены в задней части двигателя и по мере вращения вала прогоняют через корпус мотора воздух.
Если электрический двигатель работает на пониженных оборотах, то мощности потока воздуха может не хватить для охлаждения.
В этом случае, нужно выбирать частотник с датчиками температуры двигателя. Или организовать дополнительное охлаждение.
Электромагнитная совместимость преобразователей частоты
При расчёте и подключении частотника к сети и электрическому двигателю, следует помнить, что он очень подвержен помехам. Также, преобразователь частоты может и сам стать источником помех для другого оборудования. Именно поэтому, все подключения к частотнику и от него выполняются экранированными кабелями и выдерживанием дистанции в 10 см друг от друга.
По своей сути, применение частного преобразователя для питания асинхронного электрического двигателя позволило существенно продлить жизнь электрического двигателя, дало возможность регулировать работу двигателя и хорошо экономить на расходе электрической энергии.
Частотник, частотный преобразователь1ф 220 — 3ф220 для асинхронного электродвигателя
Смотрите это видео на YouTube
Преобразователь частоты для асинхронного двигателя
Назначение частотного преобразователя для асинхронных двигателей
Использование механических устройств для регулирования может привести к ударным пусковым нагрузкам, которые окажут отрицательное влияние на их эксплуатационный срок, а также приведут к существенным энергопотерям.
Чтобы исключить перечисленные отрицательные влияния на промышленное оборудование, была создана возможность заменить механическое регулирование на электронное. Достичь этого удалось в результате серьезных исследовательских работ.
Так, появился преобразователь частот нового класса, предназначенный специально для асинхронных двигателей.
Это https://techtrends.ru/catalog/preobrazovateli-chastoty/» target=»_blank»>частотные преобразователи для асинхронных двигателей с широтно-импульсным управлением (ШИМ), которые снижают пусковой ток в 4-5 раз. А также позволяют осуществить плавный пуск асинхронного двигателя. При этом управление приводом осуществляется по формуле напряжение/частота.
Преобразователь частоты для асинхронного двигателя позволяет экономить электроэнергию на 50%. Также благодаря использованию частотника становится возможной обратная связь между смежными приводами, следовательно, оборудование самонастраивается на выполнение поставленных задач и изменяются условия работы всей системы.
Принцип работы
Преобразователь частоты для асинхронного двигателя с ШИМ, по сути, является инвентором с двойным преобразованием напряжения.
Входной диодный мост выпрямляет сетевое напряжение 220 или 380В, а затем сглаживает и фильтрует его посредством конденсатора.
Далее посредством входных мостовых ключей и микросхем из постоянного напряжения формируется последовательность электрических сигналов определенной частоты и скважности. Таким образом, на выходе из частотного преобразователя образуются пучки прямоугольных импульсов. Однако, благодаря индуктивности обмоток асинхронного двигателя, они превращаются в напряжение, схожее с синусоидным.
В устройстве также имеется микропроцессор, который дает возможность выполнять такие задачи, как:
- контроль выходных параметров;
- защита системы;
- диагностика состояния подаваемого тока.
Большинство преобразователей частоты для асинхронных двигателей построены на основе двойного преобразования. Среди них выделяют два основных класса:
Среди них выделяют два основных класса:
- с созданием промежуточного звена;
- с непосредственной связью.
Каждый из видов частотников предназначен для работы в определенных условиях, которые диктуют выбор и целесообразность использования в конкретной ситуации.
Выпрямители управляемого типа обеспечивают непосредственную связь, отпирая группы тиристоров, и обеспечивают подвод напряжения к обмотке электродвигателя.
Преобразование напряжения в данном случае осуществляется посредством вырезания синусоид из входного тока. При этом полученная частота находится в диапазоне от 0 до 30Гц. Для регулируемых приводов этот вариант использования не подходит.
Для использования незапираемых тиристоров необходимо создание более сложной системы управления, которая повышает стоимость создаваемой цепи.
В противном случае, синусоида при входе может привести:
- к появлению гармоник;
- к потерям в электродвигателе;
- к перегреву электродвигателя;
- к снижению показателя крутящего момента;
- к образованию сильных помех.


Помимо этого, компенсаторы повышают стоимость цепи, габаритов и веса, а потери снижают КПД.
К другому классу относятся цепи питания, где используются частотные преобразователи для асинхронных двигателей с промежуточным звеном. Они обеспечивают преобразование электрического тока в два этапа.
На первом этапе синусоидное напряжение с постоянной частотой и амплитудой преобразуется посредством выпрямления. При этом применяются специальные фильтры, сглаживающие показатели.
На втором этапе посредством инвертора на выходе происходит преобразование энергии с изменяемым показателем частоты и амплитуды.
Это приводит:
- к снижению КПД;
- к ухудшению показателей соотношения массы и габаритов устройства.
Частотные преобразователи для асинхронных двигателей, работающие как тиристор, имеют следующие преимущества:
- обеспечивают возможность работы в системах с большими показателями тока;
- такая система предназначена для использования там, где имеются большие показатели тока;
- они устойчивы к большим нагрузкам и импульсному воздействию;
- обеспечивают высокий КПД, достигающий 98 %.

Мы перечислили все особенности каждого типа преобразователей частоты для асинхронных двигателей, теперь, попробуем выяснить, на чем следует основываться при выборе частотника.
Критерии выбора
Преобразователи частоты для асинхронных двигателей следует использовать лишь с учетом их технических характеристик.
Важными характеристиками, на которые необходимо обратить внимание, являются следующие:
- Диапазон напряжения подаваемого тока. Сегодня существуют модели частотников, работающие при различном напряжении. Диапазон напряжения может составлять 100-120В или 200-240В. Исходя из этого показателя, следует выбирать преобразователь.
- Номинальная мощность электродвигателя, которая измеряется в кВт.
- Полная мощность электродвигателя.
- Номинальный выходной ток.
- Выходное напряжение, которое часто не превышает показатель напряжения источника питания, а иногда бывает и меньше.
- Диапазон выходной частоты.
- Допустимая сила тока на выходе.
- Частота тока при входе.
- Максимальный показатель отклонений, который допускается при определенных условиях.

Эти параметры указываются в документации к преобразователю, и их необходимо учитывать. В противном случае, например, если не учтен показатель напряжения подаваемого тока, то устройство выйдет из строя.
Способы подключения
Выбор варианта подключения преобразователя частоты для асинхронных двигателей зависит от цели его применения, например, необходимости обеспечения более легкого пуска или необходимости регулировки частоты вращения двигателя.
Наиболее простой схемой подключения является установка автомата отключения перед частотником. При этом автомат должен быть рассчитан на номинальную величину напряжения, потребляемого электродвигателем.
Поскольку большинство двигателей питаются от трехфазной сети, то можно выбрать трехфазный автомат, который обеспечивает отключение двух фаз в случае, когда происходит короткое замыкание в одной из фаз.
При использовании однофазного частотного преобразователя для асинхронных двигателей, следует установить автомат, рассчитанный на утроенный ток в одной фазе.
После установки автомата, следует осуществить подключение фазных проводов к клеммам двигателя, а также подключить в цепь тормозной ресивер. После частотного преобразователя в цепь устанавливается вольтметр, который измеряет напряжение на выходе.
Для того чтобы осуществить правильное подключение частотного преобразователя, следует изучить инструкцию, которая прилагается к моделям частотников. Точное соблюдение инструкции позволит легко осуществить подключение преобразователя частоты к электродвигателю.
Что такое преобразователь частоты и для чего он нужен?
Для регулирования работы асинхронного двигателя с целью не допустить снижения его КПД применяют специальные устройства – частотные преобразователи. Их работа заключается в том, что они плавно изменяют скорость вращения двигателя, с помощью смены частоты питающего напряжения.
В данной статье мы постараемся рассмотреть ряд незаметных, на первый взгляд, особенностей в работе асинхронного электродвигателя и проанализируем, насколько важно в ходе его эксплуатации использовать частотный преобразователь.
Преобразователь частоты Danfoss
Преобразователь частоты Ритм-Н
Преобразователь частоты Веспер
Что может привести к неисправности?
В асинхронном двигателе напряжение для работы чаще всего поступает через последовательно включенный автоматический выключатель. То сесть данный способ запуска двигателя по другому называется — плавный пуск. Таким образом это провоцирует высокий рост тока пусковой обмотки, что для оборудования закончится весьма плачевно.
Частотный преобразователь имеет к этому важное отношение – он контролирует ток электродвигателя. Формируя необходимое напряжение нужной амплитуды и частоты, частотник подает их на двигатель. Поясним – в процессе его запуска преобразователь отдает не полную частоту, скажем, в 50 Герц, а где-то 0,1Гц (или чуть больше). То же самое и с напряжением – не все 220 В или 380 В, а около 20-30 (смотря, какие выставлены настройки).
То же самое и с напряжением – не все 220 В или 380 В, а около 20-30 (смотря, какие выставлены настройки).
Принцип работы преобразователя частоты для электродвигателя
Все это позволяет пропускать через обмотку статора ток оптимального значения, не выше номинального показателя, чтобы создать магнитное поле, которое, в свою очередь, вместе с созданным в обмотке током создаст крутящий момент. Что касается принципов изменения характеристик напряжения, то подробно об этом, а также о критериях выбора частотника, вы можете прочесть здесь, в одной из других наших статей. Кстати, если говорить о критериях выбора, то отметим также, что выходные токи преобразователя частоты должны быть ниже тока полного режима нагрузки.
Выше мы описывали старт двигателя. Что касается разгона, то в ходе этого процесса преобразователь плавно повышает частоту и величину поступаемого напряжения, тем самым разгоняя двигатель. Главное – настроить частотник таким образом, чтобы времени на разгон уходило как можно меньше, а ток обмотки статора не был выше её номинального значения. Кроме того, важно поддерживать достаточный крутящий момент на валу.
Главное – настроить частотник таким образом, чтобы времени на разгон уходило как можно меньше, а ток обмотки статора не был выше её номинального значения. Кроме того, важно поддерживать достаточный крутящий момент на валу.
Почему без преобразователя не обойтись? Главные преимущества его использования
Итак, преобразователь частоты дает следующие преимущества при управлении асинхронным двигателем:
- Плавный пуск и остановка электропривода
- Управление производительностью оборудования
- Установка оптимальных режимов работы
- Взаимное согласование электроприводов в сложных системах
Самые важные – это 1 и 2 пункты. Почему именно они?
Плавный пуск позволяет наращивать скорость постепенно, что позволяет не допустить скачков тока. Неконтролируемые скачки опасны, так как при прямом пуске они превышают номинальные показатели в 5-7 раз, что может спровоцировать высокую нагрузку на электросеть, защитит оборудование от перегрузок и сэкономит деньги на затратах электроэнергии.
Что касается управления производительностью, то в этом случае преобразователь частоты контролирует скорость работы электродвигателя с учетом «реальных нужд» в системе в целом. Это также помогает напрасно не тратить энергию и гарантирует её экономию в 30-60%.
Помимо 4-х основных преимуществ описанных выше, использование преобразователя обеспечивает следующие преимущества:
Классификация частотных преобразователей
В первую очередь, данные устройства различаются по режимам работы:
По типу питания:
Также данные устройства бывают с промежуточным звеном (связью) и без него. О характере работы таких устройств читайте тут, в ещё одной нашей статье.
Настройка
Настройка преобразователей выполняется строго по инструкции производителя и с учетом особенностей задачи, которая решается посредством оборудования, в котором установлен двигатель.
Например, если применяется асинхронный двигатель скалярного типа, то амплитуду сигнала и выходную частоту устанавливают по определенной формуле. Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Можно ли отказаться от частотных преобразователей?
Можно. Но лучше этого не делать. Безусловно, скорость вращения можно также регулировать и при помощи гидравлической муфты или механического вариатора и других. Но данные приспособления неэкономичны (а в промышленности это крайне важно!), у них узкий диапазон регулирования, что доставляет серьезные неудобства в ходе эксплуатации, а также они гораздо быстрее выйдут из строя.
Итоги: почему нужно использовать преобразователи частоты?
Вот основной перечень преимуществ для работы оборудования, которые вы получаете, используя преобразователи:
Итак, это наиболее важная информация о частотных преобразователях, которую мы хотели до вас донести. В завершение скажем о том, от чего зависит стоимость и на что стоит обращать внимание при выборе. Это такие факторы, как марка производителя, модель и тип управления преобразователем. Также стоит обращать внимание при выборе на тип и уровень мощности двигателя, его диапазон и точность, а также степень точности поддержки крутящего момента.
Это такие факторы, как марка производителя, модель и тип управления преобразователем. Также стоит обращать внимание при выборе на тип и уровень мощности двигателя, его диапазон и точность, а также степень точности поддержки крутящего момента.
принцип работы, особенности и применение в асинхронных электродвигателях
Чаще всего преобразователи частоты используются для асинхронного двигателя, но встречаются они и в бытовой технике. Несмотря на распространённость, они обладают не только преимуществами, но и недостатками, устранять которые приходится, используя дополнительные приборы. Все преобразователи выполняют важную функцию, и представить хоть одно производство без частотника для асинхронных двигателей невозможно.
- Сферы применения устройства
- Принцип работы частотника
- Применение в асинхронных двигателях
- Основные составляющие прибора
Сферы применения устройства
Преобразователь частоты – это специальное устройства, которое устанавливается на мощные электродвигатели.![]() Их главное предназначение — изменение частоты поступающего тока. Как известно, ток, который поступает из розетки имеет частоту, она равна 50 Гц. Для того чтобы ускорить или наоборот замедлить двигатель, эту частоту можно изменять. Роль, которую играет частотник – изменение частоты тока.
Их главное предназначение — изменение частоты поступающего тока. Как известно, ток, который поступает из розетки имеет частоту, она равна 50 Гц. Для того чтобы ускорить или наоборот замедлить двигатель, эту частоту можно изменять. Роль, которую играет частотник – изменение частоты тока.
Самый яркий пример — это стиральные машины, они имеются у каждого в доме, для ускорения частоты вращения барабана частотник электродвигателя увеличивает частоту тока, чтобы уменьшить количество оборотов, производится обратное действие. Также их используют для плавного запуска мощных двигателей: современные частотники, могут изменять колебание тока от 1-800 Герц.
Принцип работы частотника
В основе работы частотника лежит инвертор с двойным преобразованием. Преобразователь работает по следующей схеме:
- Вначале переменный синусоидальный ток (220-380 В), поступающий в инвертор выпрямляется. Для выпрямления используется диодный мост.
- После ток поступает на группу конденсаторов, где он фильтруется и сглаживается.
- Далее, мостовые ключи из биполярных транзисторов (IGBT, БТИЗ) и управляющие микросхемы принимают отфильтрованный ток и формируют из него трёх или однофазную широтно-импульсную модуляцию с требуемыми параметрами.
- На выходе получается синусоидальный ток с уже изменёнными характеристиками, синусоидальность обеспечивается индуктивностью обмоток.

Более подробно весь процесс изображён на следующей схеме:
Применение в асинхронных двигателях
Асинхронные двигатели превосходят по мощности и производительности обычные электродвигатели, но при этом они обладают рядом недостатков. Основным из них является необходимость увеличения номинальной мощности при запуске в 5-7 раз, а также то, что для регулирования скорости вращения ротора необходимо использовать специальные устройства. Увеличение потребляемой мощности при запуске порождает скачки внутри сети и ударные импульсы, в свою очередь, это негативно влияет на срок службы любого асинхронного двигателя.
Увеличение потребляемой мощности при запуске порождает скачки внутри сети и ударные импульсы, в свою очередь, это негативно влияет на срок службы любого асинхронного двигателя.
Для решения всех проблем сразу был разработан асинхронный преобразователь частоты. Их использование удобно тем, что работа частотника происходит в автоматическом режиме, и поэтому контроль за токами происходит постоянно. Это устройство уменьшает пусковые токи, тем самым не создавая перегрузок в сети и не нанося вред двигателю, также он позволяет регулировать частоту вращения ротора. Отпадает необходимость в использовании магнитного пускателя. Главные плюсы частотника:
- экономия электроэнергии;
- увеличение долговечности двигателя;
- возможность регулирования работы двигателя;
- обеспечивает обратную связь смежных приводов.
В действительности, это настоящий генератор трехфазного напряжения, при помощи которого можно добиться нужной величины и частоты.
Основные составляющие прибора
В состав любого частотника входит четыре главных модуля:
- выпрямитель;
- блок фильтрации напряжения;
- инверторный узел;
- система управления на базе микропроцессора.
Все эти модули соединены блоком управления, он контролирует системы и отвечает за работу выходного каскада, выдаваемого инвертором. Современные устройства подобного типа также обладают определёнными защитными узлами, которые защищают его от превышения тока и коротких замыканий. Также они оборудованы датчиками слежения за температурой и прочими системами, позволяющими отслеживать отклонения от нормы при его работе.
Несмотря на то что частотник должен выпрямлять ток и держать постоянную его частоту, полностью сгладить пульсации он не может, это связано с переменной составляющей и непостоянством тока в самой сети. Для того чтобы полностью убрать эти колебания, используются катушки индуктивности и конденсаторы. Их подключение и настройка происходит, как правило, в системе частотного преобразователя. Катушка сглаживает ток, благодаря своему реактивному сопротивлению, в свою очередь, конденсатор, пропуская через себя ток, выдаёт не переменное, а постоянное напряжение.
Для того чтобы полностью убрать эти колебания, используются катушки индуктивности и конденсаторы. Их подключение и настройка происходит, как правило, в системе частотного преобразователя. Катушка сглаживает ток, благодаря своему реактивному сопротивлению, в свою очередь, конденсатор, пропуская через себя ток, выдаёт не переменное, а постоянное напряжение.
Встречаются частотные преобразователи как для однофазных сетей, так и для трехфазных. Также они могут отличаться по типу управления, существуют векторные и скалярные модели. Векторные применяются в тех случаях, когда необходимо жёстко регулировать частоту вращения ротора, второй тип частотников используется на объектах, где нет особой необходимости в жёстком регулировании подаваемой частоты, их можно встретить в вентиляционных системах. Скалярный тип управления используется для однофазных систем, в свою очередь, векторная для трехфазных.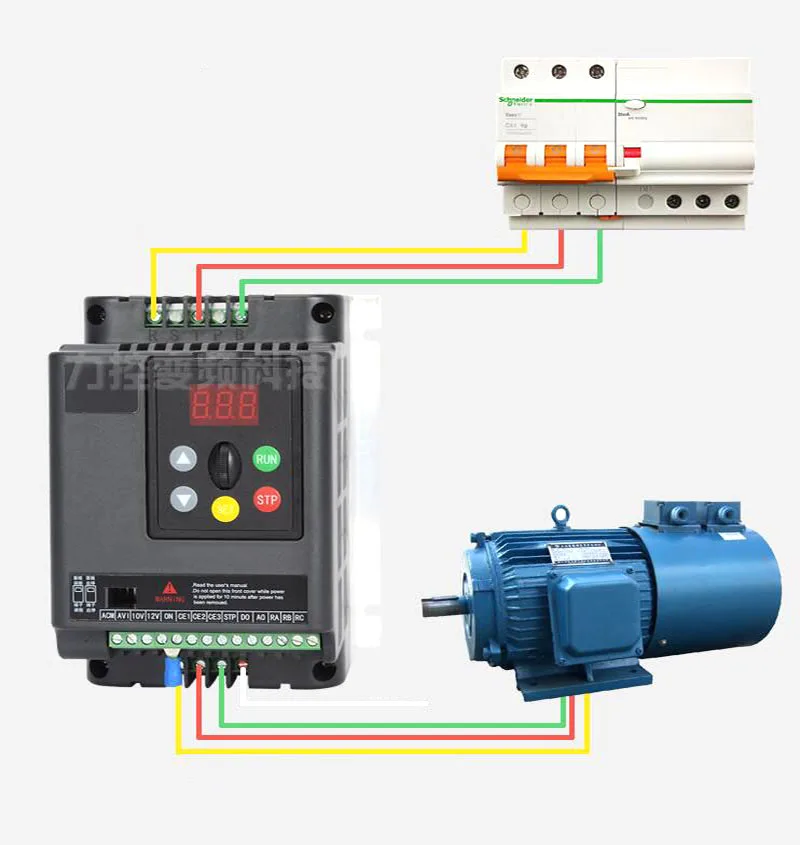 Принцип регулирования частоты в обоих случаях остаётся одинаковым.
Принцип регулирования частоты в обоих случаях остаётся одинаковым.
Частотное регулирование асинхронного двигателя. Преобразователь частоты для электродвигателя
По последним статистическим данным примерно 70% всей вырабатываемой электроэнергии в мире потребляет электропривод. И этот процент растет с каждым годом.
При правильно подобранном способе управления электродвигателем можно получить максимальный КПД, максимальный крутящий момент на валу электрической машины, при этом общая производительность механизма повысится. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную эффективность.
Для электродвигателей с питанием от преобразователя частоты КПД будет во многом зависеть от выбранного способа управления электрической машиной. Только понимая достоинства каждого метода, инженеры и проектировщики могут добиться наилучших результатов от каждого метода управления.
Содержание:
Методы управления
Многие люди, работающие в области автоматизации, но не занимающиеся непосредственно разработкой и внедрением систем электропривода, считают, что управление электродвигателем состоит из последовательности команд, вводимых с помощью интерфейса из системы управления панели или ПК. Да, с точки зрения общей иерархии управления автоматизированной системой это правильно, но есть еще способы управления самим электродвигателем. Именно эти методы окажут максимальное влияние на работоспособность всей системы.
Для асинхронных двигателей, подключенных к преобразователю частоты, существует четыре основных метода управления:
- U/f — вольт на герц;
- U/f с энкодером;
- Векторное управление без обратной связи;
- Векторное управление с обратной связью;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения ширины импульса для создания аналогового сигнала.
Широтно-импульсная модуляция применяется к преобразователю частоты с использованием фиксированного напряжения на шине постоянного тока. путем быстрого открытия и закрытия (вернее, переключения) генерируют выходные импульсы. Варьируя ширину этих импульсов, на выходе получается «синусоида» нужной частоты. Даже если форма выходного напряжения транзисторов импульсная, ток все равно получается в виде синусоиды, так как электродвигатель имеет индуктивность, влияющую на форму тока. Все методы управления основаны на ШИМ-модуляции. Разница между методами управления заключается только в способе расчета приложенного к двигателю напряжения.
В этом случае несущая частота (показана красным) представляет собой максимальную частоту переключения транзисторов. Несущая частота для инверторов обычно находится в диапазоне от 2 кГц до 15 кГц. Опорная частота (показана синим цветом) — это опорный сигнал выходной частоты. Для инверторов, применимых в обычных системах привода, как правило, лежит в диапазоне 0 Гц — 60 Гц. При наложении сигналов двух частот друг на друга будет выдаваться сигнал открытия транзистора (обозначен черным), который подает питание на электродвигатель.
При наложении сигналов двух частот друг на друга будет выдаваться сигнал открытия транзистора (обозначен черным), который подает питание на электродвигатель.
Метод управления V/F
Управление напряжением на герц, чаще всего называемое V/F, возможно, является самым простым способом регулирования. Он часто используется в простых системах электропривода из-за своей простоты и минимального количества параметров, необходимых для работы. Этот способ управления не требует обязательной установки энкодера и обязательных настроек частотно-регулируемого электропривода (но рекомендуется). Это приводит к снижению затрат на вспомогательное оборудование (датчики, провода обратной связи, реле и т. д.). Управление U/F довольно часто используется в высокочастотном оборудовании, например, его часто применяют в станках с ЧПУ для привода вращения шпинделя.
Модель с постоянным крутящим моментом имеет постоянный крутящий момент во всем диапазоне скоростей при одном и том же соотношении U/F. Модель с переменным отношением крутящего момента имеет более низкое напряжение питания на низких скоростях. Это необходимо для предотвращения насыщения электрической машины.
Модель с переменным отношением крутящего момента имеет более низкое напряжение питания на низких скоростях. Это необходимо для предотвращения насыщения электрической машины.
V/F — единственный способ управления скоростью асинхронного двигателя, который позволяет управлять несколькими приводами от одного преобразователя частоты. Соответственно, все машины запускаются и останавливаются одновременно и работают с одинаковой частотой.
Но у этого метода управления есть несколько ограничений. Например, при использовании метода управления V/F без энкодера нет абсолютной уверенности в том, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины на частоте 3 Гц ограничен 150 %. Да, ограниченного крутящего момента более чем достаточно для большинства существующего оборудования. Например, почти все вентиляторы и насосы используют метод управления V/F.
Этот метод относительно прост из-за более свободной спецификации. Регулировка скорости обычно находится в диапазоне 2–3 % от максимальной выходной частоты. Скоростная характеристика рассчитывается для частот выше 3 Гц. Быстродействие преобразователя частоты определяется скоростью его реакции на изменение опорной частоты. Чем выше скорость отклика, тем быстрее отклик привода на изменение задания скорости.
Диапазон регулирования скорости при использовании метода V/F составляет 1:40. Умножив это отношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, при которой может работать электрическая машина. Например, если максимальная частота составляет 60 Гц, а полоса обзора — 1:40, то минимальная частота составляет 1,5 Гц.
Характеристика U/F определяет соотношение частоты и напряжения во время работы преобразователя частоты. По его словам, кривая задания скорости вращения (частота электродвигателя) будет определять, помимо значения частоты, значение напряжения, подаваемого на клеммы электромашины.
Операторы и техники могут выбрать желаемую схему регулирования V/F с помощью одного параметра в современном преобразователе частоты. Предустановленные шаблоны уже оптимизированы для конкретных приложений. Также есть возможность создания собственных шаблонов, которые будут оптимизированы под конкретную систему частотно-регулируемого привода или электродвигателя.
У таких устройств, как вентиляторы или насосы, крутящий момент нагрузки зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) схемы V/F предотвращает ошибки настройки и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Машины с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование, используют метод управления постоянным крутящим моментом. При постоянной нагрузке требуется полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.
Метод управления U/F с энкодером
При необходимости повышения точности регулирования скорости в систему управления добавляется энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03 %. Выходное напряжение по-прежнему будет определяться установленной характеристикой V/F.
Этот метод управления не получил широкого распространения, так как его преимущества по сравнению со стандартными функциями V/F минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости идентичны стандартным V/F. Кроме того, при увеличении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Векторное управление с разомкнутым контуром
Векторное управление с разомкнутым контуром (VU) используется для более широкого и динамичного управления скоростью электрической машины. При пуске от преобразователя частоты двигатели могут развивать пусковой момент в 200 % от номинального момента при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может применяться асинхронный электропривод с векторным управлением. Этот метод также позволяет контролировать крутящий момент машины во всех четырех квадрантах.
Крутящий момент ограничен двигателем. Это необходимо для предотвращения повреждения оборудования, машин или изделий. Величина моментов делится на четыре разных квадранта в зависимости от направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель . Пределы можно задать для каждого квадранта отдельно, либо пользователь может установить общий крутящий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет обеспечиваться отставанием магнитного поля ротора от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то машина перейдет в режим рекуперативного торможения с возвратом энергии, иначе говоря, асинхронный двигатель перейдет в режим генератора.
Например, машина для укупорки бутылок может использовать ограничение крутящего момента в квадранте 1 (вперед с положительным крутящим моментом), чтобы предотвратить чрезмерное затягивание крышки бутылки. Механизм совершает движение вперед и использует положительный крутящий момент, чтобы завинтить крышку на бутылке. С другой стороны, такое устройство, как лифт с противовесом тяжелее пустой кабины, будет использовать квадрант 2 (обратное вращение и положительный крутящий момент). Если автомобиль поднимется на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и предотвращения свободного падения противовеса, так как он тяжелее кабины.
Обратная связь по току в этих инверторах позволяет устанавливать ограничения на крутящий момент и ток двигателя, поскольку с увеличением тока увеличивается и крутящий момент. Выходное напряжение инвертора может увеличиваться, если механизму требуется больший крутящий момент, или уменьшаться, если достигнут предел. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным, чем принцип U/F.
Также преобразователи частоты с разомкнутым векторным управлением имеют более высокую скорость отклика — 10 Гц, что позволяет использовать его в механизмах с ударными нагрузками. Например, в камнедробилках нагрузка постоянно меняется и зависит от объема и размеров перерабатываемой породы.
В отличие от модели управления V/F, векторное управление использует векторный алгоритм для определения максимального эффективного рабочего напряжения двигателя.
Векторное управление ВУ решает эту проблему за счет наличия обратной связи по току двигателя. Как правило, обратная связь по току создается внутренними трансформаторами тока самого преобразователя частоты. На основании полученного значения тока преобразователь частоты рассчитывает крутящий момент и поток электрической машины. Базовый вектор тока двигателя математически разделен на вектор тока намагничивания (I d) и вектор крутящего момента (I q).
Используя данные и параметры электрической машины, инвертор вычисляет векторы тока намагничивания (I d) и крутящего момента (I q). Для достижения максимальной производительности в преобразователе частоты I d и I q должны быть разделены на 90 0 . Это важно, поскольку sin 90 0 = 1, а значение 1 представляет максимальное значение крутящего момента.
Как правило, векторное управление асинхронным двигателем обеспечивает более жесткое управление. Регулировка скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет удерживать крутящий момент на малых скоростях.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и БУ без обратной связи. Основное отличие заключается в наличии энкодера, который позволяет частотно-регулируемому приводу развивать 200% пусковой момент при 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других грузоподъемных машин, чтобы предотвратить погружение груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машины, а моментом. В некоторых механизмах именно значение момента имеет большое значение. Например, намоточный станок, блокировочные механизмы и другие. В таких устройствах необходимо регулировать момент машины.
Управление частотным приводом позволяет с помощью специального преобразователя гибко изменять режимы работы электродвигателя: пуск, останов, ускорение, торможение, изменение скорости вращения.
Изменение частоты питающего напряжения приводит к изменению угловой скорости магнитного поля статора. Когда частота уменьшается, двигатель уменьшается, а скольжение увеличивается.
Принцип действия преобразователя частоты привода
Основным недостатком асинхронных двигателей является сложность регулирования скорости традиционными способами: изменением напряжения питания и введением в цепь обмотки дополнительных сопротивлений. Более совершенным является частотный привод электродвигателя. До недавнего времени преобразователи стоили дорого, но появление IGBT-транзисторов и микропроцессорных систем управления позволило зарубежным производителям создавать доступные устройства. Самые совершенные сейчас статики
Угловая скорость магнитного поля статора ω 0 изменяется пропорционально частоте ƒ 1 в соответствии с формулой:
ω 0 = 2π × ƒ 1 /p,
где p — число полюсов пары.
Способ обеспечивает плавное регулирование скорости. При этом скорость скольжения двигателя не увеличивается.
Для получения высоких энергетических показателей двигателя — КПД, коэффициента мощности и перегрузочной способности вместе с частотой напряжение питания изменяют по определенным зависимостям:
- постоянный момент нагрузки — U 1 / ƒ 1 = const;
- вентилятор характер момента нагрузки — U 1 / ƒ 1 2 = const;
- момент нагрузки обратно пропорционален скорости — U 1 /√ ƒ 1 = const.
Эти функции реализуются с помощью преобразователя, который одновременно изменяет частоту и напряжение на статоре двигателя. Экономия электроэнергии достигается за счет регулирования по необходимому технологическому параметру: напору насоса, производительности вентилятора, скорости подачи машины и т. д. При этом параметры изменяются плавно.
Методы частотного управления асинхронными и синхронными электродвигателями
В частотно-регулируемом приводе на базе асинхронных двигателей с короткозамкнутым ротором используются два метода управления — скалярный и векторный. В первом случае амплитуда и частота питающего напряжения изменяются одновременно.
Это необходимо для поддержания работоспособности двигателя, чаще всего постоянного отношения его максимального крутящего момента к моменту сопротивления на валу. В результате КПД и коэффициент мощности остаются неизменными во всем диапазоне вращения.
Векторное управление заключается в одновременном изменении амплитуды и фазы тока на статоре.
Частотный привод типа работает только при малых нагрузках, при увеличении которых сверх допустимых значений возможно нарушение синхронизма.
Преимущества частотного привода
Частотное регулирование имеет целый ряд преимуществ перед другими методами.
- Автоматизация двигателя и производственных процессов.
- Плавный пуск, исключающий типичные ошибки, возникающие при разгоне двигателя. Повышение надежности частотного привода и оборудования за счет снижения перегрузок.
- Повышение экономичности эксплуатации и производительности привода в целом.
- Создание постоянной частоты вращения электродвигателя независимо от характера нагрузки, что важно при переходных процессах. Использование обратной связи позволяет поддерживать постоянную скорость двигателя при различных возмущающих воздействиях, в частности, при переменных нагрузках.
- Преобразователи легко интегрируются в существующие технические системы без существенной переделки и остановки технологических процессов. Ассортимент мощностей большой, но с их увеличением значительно растут цены.
- Возможность отказаться от вариаторов, коробок передач, дросселей и другого управляющего оборудования или расширить область их применения. Это приводит к значительной экономии энергии.
- Устранение вредного воздействия на технологическое оборудование переходных процессов, таких как гидравлический удар или повышенное давление жидкости в трубопроводах при снижении ее расхода в ночное время.
Дефекты
Как и все инверторы, частотники являются источниками помех. Им нужны фильтры.
Ценность бренда высока. Она значительно увеличивается с увеличением мощности устройств.
Регулятор частоты для транспортировки жидкостей
На объектах, где перекачивают воду и другие жидкости, регулирование расхода в основном осуществляется с помощью задвижек и вентилей. В настоящее время перспективным направлением является использование частотного привода насоса или вентилятора, приводящего в движение их лопасти.
Использование преобразователя частоты в качестве альтернативы дроссельной заслонке дает эффект энергосбережения до 75%. Клапан, сдерживая поток жидкости, не выполняет полезной работы. При этом увеличиваются потери энергии и вещества на ее транспортировку.
Частотный привод позволяет поддерживать постоянное давление у потребителя при изменении расхода жидкости. С датчика давления поступает сигнал на привод, который изменяет обороты двигателя и тем самым регулирует его скорость, поддерживая заданный расход.
Насосные агрегаты управляются изменением их производительности. Потребляемая мощность насоса находится в кубической зависимости от производительности или скорости вращения колеса. Если скорость уменьшить в 2 раза, производительность насоса снизится в 8 раз. Наличие суточного графика потребления воды позволяет определить экономию электроэнергии за этот период, если управлять частотным приводом. За счет него можно автоматизировать насосную станцию и тем самым оптимизировать напор воды в сетях.
Эксплуатация систем вентиляции и кондиционирования воздуха
Максимальный расход воздуха в системах вентиляции не всегда необходим. Условия эксплуатации могут потребовать снижения производительности. Традиционно для этого используется троттлинг, когда скорость вращения колеса остается постоянной. Изменять расход воздуха удобнее за счет частотно-регулируемого привода при изменении сезонных и климатических условий, выделении тепла, влаги, паров и вредных газов.
Энергосбережение в системах вентиляции и кондиционирования воздуха достигается не ниже, чем в насосных станциях, так как потребляемая мощность вращения вала находится в кубической зависимости от оборотов.
Устройство преобразователя частоты
Современный привод частоты выполнен по схеме двойного преобразователя. Он состоит из выпрямителя и импульсного инвертора с системой управления.
После выпрямления сетевого напряжения сигнал сглаживается фильтром и подается на инвертор с шестью транзисторными ключами, где каждый из них подключен к обмоткам статора асинхронного электродвигателя. Блок преобразует выпрямленный сигнал в трехфазный сигнал необходимой частоты и амплитуды. Силовые IGBT в выходных каскадах имеют высокую частоту переключения и обеспечивают четкую прямоугольную волну без искажений. Благодаря фильтрующим свойствам обмоток двигателя форма кривой тока на их выходе остается синусоидальной.
Способы контроля амплитуды сигнала
Выходное напряжение регулируется двумя способами:
- Амплитуда — изменение величины напряжения.
- Широтно-импульсная модуляция — это метод преобразования импульсного сигнала, при котором изменяется его длительность, но частота остается неизменной. Здесь мощность зависит от ширины импульса.
Второй способ чаще всего используется в связи с развитием микропроцессорной техники. Современные инверторы выполнены на основе вентильных GTO-тиристоров или IGBT-транзисторов.
Возможности и применение преобразователей
Преобразователь частоты имеет много возможностей.
- Регулирование частоты трехфазного питающего напряжения от нуля до 400 Гц.
- Разгон или торможение электродвигателя с 0,01 сек. до 50 мин. по заданному закону времени (обычно линейному). При разгоне возможно не только снижение, но и увеличение до 150% динамических и пусковых моментов.
- Реверс двигателя с заданными режимами торможения и разгона до заданной скорости в другую сторону.
- В преобразователях используется настраиваемая электронная защита от коротких замыканий, перегрузок, утечки на землю и обрывов линий питания двигателя.
- На цифровые индикаторы преобразователей выводятся данные об их параметрах: частоте, напряжении питания, скорости, токе и т.д.
- В преобразователях настраиваются вольт-частотные характеристики в зависимости от того, какие нагрузки требуются на двигатели. Функции систем управления на их основе обеспечивают встроенные контроллеры.
- Для низких частот важно использовать векторное управление, которое позволяет работать с полным крутящим моментом двигателя, поддерживать постоянную скорость при изменении нагрузок и контролировать крутящий момент на валу. Преобразователь частоты хорошо работает при правильном вводе паспортных данных двигателя и после его успешного тестирования. Известна продукция компаний HYUNDAI, Sanyu и др.
Области применения преобразователей следующие:
- 9насосы 0018 в системах горячего и холодного водоснабжения и теплоснабжения;
- шламовые, песочные и шламовые насосы обогатительных фабрик;
- транспортные системы: конвейеры, рольганги и другие средства;
- смесители, мельницы, дробилки, экструдеры, дозаторы, питатели;
- центрифуги;
- лифты;
- металлургическое оборудование;
- буровое оборудование;
- электроприводы станков;
- Экскаваторное и крановое оборудование, механизмы манипулятора.
Производители преобразователей частоты, отзывы
Отечественный производитель уже начал выпускать продукцию, подходящую для пользователей по качеству и цене. Преимуществом является возможность быстрого получения нужного устройства, а также подробная консультация по его настройке.
Компания «Эффективные системы» производит серийную продукцию и опытные партии оборудования. Продукция используется для бытового использования, в малом бизнесе и в промышленности. Производитель Vesper выпускает семь серий преобразователей, среди которых есть многофункциональные, подходящие для большинства промышленных механизмов.
Лидером по производству частотников является датская компания Danfoss. Ее продукция используется в системах вентиляции, кондиционирования, водоснабжения и отопления. Финская компания Vacon, входящая в состав датской компании, выпускает модульные конструкции, из которых можно собрать необходимые устройства без лишних деталей, что позволяет сэкономить на комплектующих. Также известны преобразователи международного концерна ABB, используемые в промышленности и быту.
Судя по отзывам, дешевые отечественные преобразователи можно использовать для решения простых типовых задач, а для сложных нужна марка с гораздо большим количеством настроек.
Заключение
Преобразователь частоты управляет электродвигателем путем изменения частоты и амплитуды питающего напряжения, защищая его от неисправностей: перегрузок, коротких замыканий, обрывов питающей сети. Они выполняют три основные функции, связанные с ускорением, торможением и частотой вращения двигателя. Это позволяет повысить эффективность оборудования во многих областях техники.
Преобразователи частоты предназначены для плавного регулирования скорости асинхронного двигателя путем создания на выходе преобразователя трехфазного напряжения переменной частоты. В простейших случаях регулирование частоты и напряжения происходит в соответствии с
задана V/f характеристика
, наиболее совершенные преобразователи реализуют так называемое
векторное управление
.
Принцип работы преобразователя частоты или, как его часто называют, инвертора: переменное напряжение промышленной сети выпрямляется блоком выпрямительных диодов и фильтруется большой конденсаторной батареей для минимизации пульсаций принимаемого напряжения . Это напряжение подается на мостовую схему, включающую шесть управляемых IGBT или MOSFET транзисторов с диодами, включенными встречно-параллельно для защиты транзисторов от пробоя напряжения обратной полярности, возникающего при работе с обмотками двигателя. Кроме того, в схему иногда включают схему «слива» энергии — транзистор с резистором рассеивания большой мощности. Эта схема используется в режиме торможения для гашения напряжения, генерируемого двигателем, и защиты конденсаторов от перезарядки и выхода из строя.
Блок-схема инвертора показана ниже.
Преобразователь частоты в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Это дорого и ненадежно. В процессе эксплуатации щетки искрят, а коллектор изнашивается под воздействием электроэрозии. Такой электродвигатель нельзя использовать в запыленных и взрывоопасных средах.
Асинхронные электродвигатели во многом превосходят двигатели постоянного тока: они просты по конструкции и надежны, так как не имеют подвижных контактов. По сравнению с двигателями постоянного тока они имеют меньшие габариты, вес и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации.
Основным недостатком асинхронных электродвигателей является сложность регулирования их скорости традиционными способами (изменением напряжения питания, введением в цепь обмотки дополнительных сопротивлений).
Управление асинхронным электродвигателем в частотном режиме до недавнего времени представляло большую проблему, хотя теория частотного регулирования была разработана еще в тридцатые годы. Развитие частотно-регулируемого электропривода сдерживала высокая стоимость преобразователей частоты. Появление силовых цепей на IGBT-транзисторах, разработка высокопроизводительных микропроцессорных систем управления позволили различным компаниям Европы, США и Японии создавать современные преобразователи частоты по доступной стоимости.
Скорость вращения приводов можно регулировать с помощью различных устройств: механических вариаторов, гидромуфт, резисторов, дополнительно вводимых в статор или ротор, электромеханических преобразователей частоты, статических преобразователей частоты.
Применение первых четырех устройств не обеспечивает качественного регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации. Статические преобразователи частоты в настоящее время являются наиболее совершенными устройствами управления асинхронными приводами.
Принцип частотного метода управления скоростью асинхронного двигателя заключается в том, что изменяя частоту f1 питающего напряжения, можно в соответствии с выражением
постоянное число пар полюсов p изменять угловую скорость магнитного поля статора.
Этот метод обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики отличаются высокой жесткостью.
В этом случае регулирование скорости не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики.
Для получения высоких энергетических характеристик асинхронного двигателя — коэффициентов мощности, КПД, перегрузочной способности — необходимо одновременно с частотой изменять входное напряжение.
Закон изменения напряжения зависит от характера момента нагрузки Ms. При постоянном моменте нагрузки Mс=const напряжение на статоре необходимо регулировать пропорционально частоте:
Для вентиляторного характера момента нагрузки, это состояние имеет вид:
Когда момент нагрузки обратно пропорционален скорости:
Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на обмотке статора асинхронного двигателя.
Преимущества использования регулируемого электропривода в технологических процессах
Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получить новые качества систем и объектов. Значительная экономия электроэнергии достигается за счет регулирования любого технологического параметра. Если это конвейер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор, вы можете поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или основное движение.
Особым экономическим эффектом от применения преобразователей частоты является применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор наиболее распространенным способом управления производительностью таких объектов является использование задвижек или регулирующих клапанов, но сегодня становится доступным частотное управление асинхронным двигателем, который приводит в движение, например, рабочее колесо насосного агрегата или вентилятора. . При использовании частотных регуляторов обеспечивается плавная регулировка скорости вращения, что в большинстве случаев позволяет отказаться от использования редукторов, вариаторов, дросселей и другой аппаратуры управления.
При подключении через преобразователь частоты двигатель запускается плавно, без пусковых токов и ударов, что снижает нагрузку на двигатель и механизмы, тем самым увеличивая срок их службы.
Перспектива частотного регулирования хорошо видна из рисунка
Таким образом, при дросселировании поток вещества, сдерживаемый вентилем или вентилем, не совершает полезной работы. Использование регулируемого электропривода насоса или вентилятора позволяет установить необходимое давление или расход, что позволит не только сэкономить электроэнергию, но и уменьшить потери транспортируемого вещества.
Структура преобразователя частоты
Большинство современных преобразователей частоты построены по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), инвертора силовых импульсов и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное сетевое напряжение преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка двигателя подключается через соответствующий ключ к плюсовой и минусовой клеммам выпрямителя. Инвертор преобразует выпрямленное напряжение в трехфазное переменное напряжение нужной частоты и амплитуды, которое подается на обмотки статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет формировать синусоидальный выходной сигнал с минимальными искажениями.
Как работает преобразователь частоты
Преобразователь частоты состоит из неуправляемого диодного силового выпрямителя B, независимого инвертора, системы ШИМ-управления, системы автоматического управления, катушки индуктивности Lb и фильтрующего конденсатора Cb. Регулирование выходной частоты fвых. а напряжение Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления.
Широтно-импульсное управление характеризуется периодом модуляции, в течение которого статорная обмотка электродвигателя подключается попеременно к положительному и отрицательному полюсам выпрямителя.
Длительность этих состояний в периоде ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ в обмотках двигателя протекают синусоидальные токи из-за их фильтрующих свойств.
Таким образом, форма кривой выходного напряжения представляет собой высокочастотную биполярную последовательность прямоугольных импульсов (рис. 3).
Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в период выходной частоты АВИ модулируется по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного двигателя) близка к синусоидальной.
Выходное напряжение инвертора можно регулировать двумя способами: амплитудным (AR) изменением входного напряжения Ub и широтно-импульсным (PWM) изменением программы переключения вентилей V1-V6 при Ub = const.
Второй способ получил широкое распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя близка к синусоидальной из-за фильтрующих свойств самих обмоток.
Такое управление позволяет получить высокий КПД преобразователя и эквивалентно аналоговому управлению по частоте и амплитуде напряжения.
Современные инверторы основаны на полностью управляемых силовых полупроводниковых приборах — вентильных GTO — тиристорах, или биполярных транзисторах IGBT с изолированным затвором. На рис. 2.45 показана 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах.
Состоит из входного емкостного фильтра Сф и шести IGBT-транзисторов V1-V6, включенных встречно-параллельно обратнотоковым диодам D1-D6.
За счет поочередного переключения вентилей V1-V6 по алгоритму, заданному системой управления, постоянное входное напряжение Uv преобразуется в переменное прямоугольно-импульсное выходное напряжение. Активная составляющая тока асинхронного электродвигателя протекает через управляемые ключи V1-V6, а реактивная составляющая тока — через диоды D1-D6.
I – трехфазный мостовой инвертор;
Б — трехфазный мостовой выпрямитель;
Cf — конденсатор фильтра;
Вариант схемы подключения преобразователя частоты Omron.
Подключение преобразователей частоты в соответствии с требованиями ЭМС
Монтаж и подключение в соответствии с требованиями ЭМС подробно описаны в соответствующих руководствах по устройствам.
Техническая информация Датчики
Содержимое:
В асинхронных электродвигателях необходимо регулировать скорость вращения ротора. Для этого используется частотно-регулируемый привод, основным элементом которого является преобразователь частоты. В его конструкцию входит мост постоянного тока, который также является выпрямителем, преобразующим промышленный переменный ток в постоянный. Еще одна важная деталь — инвертор, осуществляющий обратное преобразование постоянного тока в переменный с необходимой частотой и амплитудой.
Принцип работы частотно-регулируемого привода
Асинхронные двигатели широко применяются в промышленности и на транспорте, являясь главной движущей силой агрегатов, машин и механизмов. Они очень надежны и относительно легко ремонтируются.
Однако эти устройства могут вращаться только на одной частоте, которая питается переменным током. Для работы в разных диапазонах используются специальные устройства – преобразователи частоты, подстраивающие частоты под требуемые параметры.
Работа преобразователей тесно связана с принципом работы асинхронного двигателя. Его статор состоит из трех обмоток, в каждую из которых подается электрический ток, создающий переменное магнитное поле. Под действием этого поля в роторе индуцируется ток, что также приводит к возникновению магнитного поля. В результате взаимодействия полей статора и ротора начинается вращение ротора.
При запуске асинхронного двигателя происходит значительное потребление тока от сети. Из-за этого привод механизма испытывает значительные перегрузки. Возникает резкое стремление двигателя выйти на номинальные обороты. В результате сокращается срок службы не только самого агрегата, но и тех устройств, которые он приводит в движение.
Эта проблема успешно решается за счет использования частотно-регулируемого привода, позволяющего изменять частоту напряжения, питающего двигатель. Использование современных электронных компонентов делает эти устройства небольшими и высокоэффективными.
Принцип работы преобразователя частоты достаточно прост. Сначала сетевое напряжение подается на выпрямитель, где оно преобразуется в постоянный ток. Затем он сглаживается конденсаторами и подается на транзисторный преобразователь. Его транзисторы в открытом состоянии имеют чрезвычайно низкое сопротивление. Их открытие и закрытие происходит в определенное время с помощью электронного управления. Напряжение образуется, подобное трехфазному, при смещении фаз относительно друг друга. Импульсы прямоугольные, но на работу двигателя это никак не влияет.
Преобразователи частоты имеют большое значение при работе. При такой схеме подключения необходимо использовать фазосдвигающий конденсатор для создания крутящего момента. КПД блока заметно падает, однако преобразователь частоты повысит его производительность.
Таким образом, использование частотно-регулируемого привода делает управление трехфазными двигателями переменного тока более эффективным. В результате производственные процессы совершенствуются, а энергоресурсы используются более рационально.
Достоинства и недостатки устройств частотного регулирования
Эти устройства регулирования обладают несомненными достоинствами и обеспечивают высокий экономический эффект. Отличаются высокой точностью регулировок, обеспечивают пусковой момент, равный максимальному. При необходимости электродвигатель может работать с частичной нагрузкой, что позволяет значительно экономить электроэнергию. Регуляторы частоты значительно продлевают срок службы оборудования. При плавном пуске двигателя его износ становится намного меньше.
ЧРП можно диагностировать дистанционно через полевую шину. Это позволяет вести учет отработанного времени, распознавать выпадения фаз во входных и выходных цепях, а также выявлять другие дефекты и неисправности.
К регулирующему устройству можно подключить различные датчики, позволяющие регулировать любые величины, например, давление. При внезапном исчезновении сетевого напряжения срабатывает система управляемого торможения и автоматического повторного пуска. Скорость вращения стабилизируется при изменении нагрузки. Преобразователь частоты становится альтернативной заменой автоматического выключателя.
Основным недостатком является создание помех большинством моделей таких устройств. Для обеспечения нормальной работы необходимо установить фильтры радиопомех. Кроме того, повышенная мощность частотно-регулируемых приводов значительно удорожает их стоимость, поэтому минимальный срок окупаемости составляет 1-2 года.
Применение регулирующих устройств
Частоторегулирующие устройства применяются во многих областях — в промышленности и в быту. Ими комплектуются прокатные станы, конвейеры, режущие машины, вентиляторы, компрессоры, смесители, бытовые стиральные машины и кондиционеры. Приводы отлично зарекомендовали себя в городском троллейбусном транспорте. Применение частотно-регулируемых приводов в станках с числовым программным управлением позволяет синхронизировать движения в направлении сразу многих осей.
Максимальный экономический эффект данные системы дают при использовании в различном насосном оборудовании. Стандартом любого типа является регулировка дросселей, установленных в напорных магистралях, и определение количества рабочих агрегатов. За счет этого можно получить определенные технические параметры, такие как давление в трубопроводе и другие.
Насосы имеют постоянную скорость и не учитывают изменение расхода в результате переменного водопотребления. Даже в случае минимального расхода насосы будут поддерживать постоянную скорость вращения, что приведет к созданию избыточного давления в сети и возникновению аварийных ситуаций. Все это сопровождается значительным бесполезным потреблением электроэнергии. В основном это происходит ночью при резком падении потребления воды.
С появлением частотно-регулируемого привода появилась возможность поддерживать постоянное давление непосредственно у потребителей. Эти системы хорошо зарекомендовали себя в связке с асинхронными двигателями общего назначения. Частотное регулирование позволяет изменять скорость вращения вала, делая ее выше или ниже номинальной. Датчик давления, установленный у потребителя, передает информацию на частотно-регулируемый привод, который, в свою очередь, изменяет частоту, подаваемую на двигатель.
Современные устройства управления имеют компактные размеры. Они размещены в защищенном от пыли и влаги корпусе. Благодаря удобному интерфейсу устройства можно эксплуатировать даже в самых сложных условиях, с широким диапазоном мощностей — от 0,18 до 630 киловатт и напряжением 220/380 вольт.
Электропривод регулируемый предназначен для управления двигателем путем регулирования параметров. Скорость прямо пропорциональна частоте. Поэтому, варьируя частоту, можно поддерживать заданную по технологии скорость вращения вала двигателя. Пошаговое описание рабочего процесса для частотно-регулируемого привода (ЧРП) выглядит примерно так.
- Шаг первый. Диодный силовой выпрямитель преобразует однофазный или трехфазный входной ток в постоянный ток.
- Шаг второй. Преобразователь частоты для управления крутящим моментом и скоростью вращения вала двигателя.
- Шаг третий. Контроль выходного напряжения, поддержание постоянного соотношения U/f.
Устройство, выполняющее обратную функцию преобразования постоянного тока в переменный на выходе системы, называется инвертором. Избавление от пульсаций шины достигается добавлением дросселя и фильтрующего конденсатора.
Как выбрать преобразователь частоты
Преобладающее количество преобразователей частоты выпускается со встроенным фильтром электромагнитной совместимости (ЭМС).
Различают такие виды управления, как бездатчиковое, векторное и др. В соответствии с заданными приоритетами при принятии управленческих решений выбирают приводы по:
- типу нагрузки;
- напряжение и мощность двигателя;
- режим управления;
- регулировки;
- Электромагнитная совместимость и т. д.
Если ЧРП предназначен для асинхронного двигателя с длительным сроком службы, то рекомендуется выбирать преобразователь частоты с завышенным выходным током. С помощью современных преобразователей частоты возможно управление с пульта, через интерфейс или комбинированным способом.
Технические особенности применения частотного электропривода
- Для обеспечения высокой производительности можно свободно переключаться в любой режим в настройках.
- Почти все устройства имеют функции диагностики, что позволяет быстро устранить проблему. Однако рекомендуется в первую очередь проверить настройки, чтобы исключить возможность непроизвольных действий сотрудников.
- Регулируемый привод может синхронизировать конвейерные процессы или задавать определенное соотношение взаимозависимых величин. Сокращение оборудования приводит к оптимизации технологии.
- В состоянии автонастройки параметры двигателя автоматически сохраняются в памяти преобразователя частоты. За счет этого повышается точность расчета крутящего момента и улучшается компенсация скольжения.
Область применения
Производители предлагают широкий спектр приводов, используемых в областях, где задействованы электродвигатели. Идеальное решение для всех видов нагрузок и вентиляторов. Системы среднего класса используются на угольных электростанциях, в горнодобывающей промышленности, на мельницах, в коммунальном хозяйстве и т. д. Диапазон номинальных значений следующий: 3 кВ, 3,3 кВ, 4,16 кВ, 6 кВ, 6,6 кВ, 10 кВ и 11 кВ.
С появлением регулируемого электропривода контроль напора воды не вызывает проблем у конечного пользователя. Интерфейс с продуманной структурой скриптов отлично подходит для управления насосным оборудованием. Благодаря своей компактной конструкции привод может быть установлен в различных конструкциях шкафов. Продукция нового поколения обладает свойствами передовой технологии:
- высокая скорость и точность управления в векторном режиме;
- значительная экономия энергии;
- быстрые динамические характеристики;
- большой низкочастотный крутящий момент;
- двойное торможение и т. д.
Назначение и технические показатели
Комплектные ЧРП напряжением до и выше 1 кВ (предназначены для приема и преобразования энергии, защиты электрооборудования от токов короткого замыкания, перегрузок) позволяют:
- плавно запустить двигатель, а, следовательно , уменьшить его износ;
- стоп, поддерживайте обороты двигателя.
Комплектные частотно-регулируемые приводы шкафного типа до 1 кВ выполняют те же задачи по отношению к двигателям мощностью 0,55 — 800 кВт. Привод работает нормально, когда напряжение сети находится в диапазоне от -15 % до +10 %. При безостановочной работе происходит снижение мощности, если напряжение составляет 85%-65%. Суммарный коэффициент мощности cosj = 0,99. Выходное напряжение автоматически регулируется автоматическим вводом резерва (АВР).
Преимущества использования
С точки зрения оптимизации и потенциальных преимуществ предоставляется возможность:
- контролировать процесс с высокой точностью;
- удаленно диагностировать накопитель;
- учитывать моточасы;
- контроль неисправности и старения механизмов;
- увеличить ресурс машин;
- значительно снижают акустический шум электродвигателя.
Заключение
Что такое CHRP? Это контроллер двигателя, который управляет электродвигателем, регулируя частоту входной сети, и одновременно защищает агрегат от различных неисправностей (перегрузки по току, токов короткого замыкания).
Электроприводы (выполняющие три функции, связанные со скоростью, управлением и торможением) являются незаменимым устройством для работы электродвигателей и других вращающихся машин. Системы активно применяются во многих областях производства: в нефтегазовой промышленности, атомной энергетике, деревообработке и др.
Устройство, принцип действия, назначение
Поскольку электропривод является одним из основных способов механизации производства и бытовых задач, в некоторых случаях возникает необходимость регулировки скорости электродвигателей. В зависимости от их типа и принципа действия применяются различные технические решения. Одним из них является преобразователь частоты. Что это такое и где применяется частотник, мы расскажем в этой статье.
- Определение
- Устройство
- Типы частотников и область применения
- Методы управления
- Количество фаз
- Схема подключения
Определение
По определению преобразователь частоты представляет собой электронный преобразователь мощности для изменения частоты переменного тока. Но в зависимости от исполнения меняется как уровень напряжения, так и количество фаз. Вам может быть не совсем понятно, зачем нужно такое устройство, но мы постараемся рассказать вам об этом простыми словами.
Частота вращения вала синхронных и асинхронных двигателей (АД) зависит от частоты вращения магнитного потока статора и определяется по формуле:
n = (60*F/p)*(1-S),
где n — число оборотов вала АД, p — число пар полюсов, s — скольжение, f — частота переменного тока.
Проще говоря, скорость вращения ротора зависит от частоты и количества пар полюсов. Число пар полюсов определяется конструкцией катушек статора, а частота тока в сети постоянна. Следовательно, чтобы регулировать скорость, мы можем управлять частотой только с помощью преобразователей.
Устройство
Ввиду вышеизложенного переформулируем ответ на вопрос, что это такое:
Преобразователь частоты – это электронное устройство для изменения частоты переменного тока, а значит, и скорости вращения ротор асинхронной (и синхронной) электрической машины.
Графическое обозначение по ГОСТ 2.737-68 вы можете увидеть ниже:
Называется электронным, так как основан на схеме полупроводникового переключателя. В зависимости от функциональных особенностей и типа управления будет видоизменяться как принципиальная схема, так и алгоритм работы.
На схеме ниже показано, как устроен преобразователь частоты:
Принцип работы преобразователя частоты следующий:
- Сетевое напряжение поступает на выпрямитель 1 и становится выпрямленным пульсирующим.
- В блоке 2 сглаживаются пульсации и частично компенсируется реактивная составляющая.
- Блок 3 представляет собой группу силовых ключей, управляемых системой управления (4) с использованием широтно-импульсной модуляции (ШИМ). Такая конструкция позволяет получить на выходе двухуровневое регулируемое ШИМ напряжение, которое после сглаживания приближается к синусоидальной форме. В дорогих моделях применена трехуровневая схема, где используется большее количество клавиш. Это позволяет добиться более близкой к синусоидальной формы волны. В качестве полупроводниковых ключей могут быть использованы тиристоры, полевые или IGBT-транзисторы. В последнее время наиболее востребованы и популярны последние два типа из-за эффективности, малых убытков и простоты управления.
- С помощью ШИМ формируется необходимый уровень напряжения, простыми словами — так модулируется синусоида, поочередно включая пары ключей, формируя линейное напряжение.
Вот мы вкратце описали, как работает преобразователь частоты для электродвигателя и из чего он состоит. Он используется в качестве вторичного источника питания и не только управляет формой тока питающей сети, но и преобразует его значение и частоту в соответствии с заданными параметрами.
Типы частотников и область применения
Способы управления
Регулировка скорости может осуществляться разными способами, как по способу установки требуемой частоты, так и по способу регулирования. Частотники по способу управления делятся на два типа:
- Со скалярным управлением.
- С векторным управлением.
Устройства первого типа регулируют частоту по заданной функции U/F, то есть напряжение изменяется вместе с частотой. Пример такой зависимости напряжения от частоты можно наблюдать ниже.
Может быть разным и запрограммирован под конкретную нагрузку, например, на вентиляторах он не линейный, а напоминает ветвь параболы. Этот принцип работы удерживает магнитный поток в зазоре между ротором и статором практически постоянным.
Особенностью скалярного управления является его распространенность и относительная простота реализации. Чаще всего используется для насосов, вентиляторов и компрессоров. Такие частотники часто используют, если необходимо поддерживать стабильное давление (или другой параметр), это могут быть и погружные насосы для скважин, если рассматривать бытовое применение.
В производстве область применения широкая, например, регулирование давления в тех же трубопроводах и выполнение автоматических систем вентиляции. Диапазон регулирования обычно 1:10, проще говоря максимальная скорость от минимальной может отличаться в 10 раз. Из-за особенностей реализации алгоритмов и схемотехники такие устройства обычно дешевле, что является их основным преимуществом.
Недостатки:
- Не слишком точная поддержка оборотов.
- Замедленная реакция на смену режима.
- Чаще всего нет возможности контролировать момент на валу.
- При увеличении скорости выше номинальной момент на валу двигателя падает (то есть когда поднимаем частоту выше номинальной 50Гц).
Последнее связано с тем, что напряжение на выходе зависит от частоты, при номинальной частоте напряжение равно сетевому, и частотник не умеет его поднимать выше, на графике можно было увидеть четную часть графика после 50 Гц. Следует отметить, что зависимость момента от частоты, она падает по закону 1/f, на графике ниже показана красным цветом, а зависимость мощности от частоты — синим цветом.
Преобразователи частоты с векторным управлением имеют другой принцип работы, здесь не только напряжение соответствует кривой U/f. Характеристики выходного напряжения изменяются в соответствии с сигналами датчиков, благодаря чему на валу поддерживается определенный момент. Но зачем нужен такой метод управления? Отличительными чертами преобразователя частоты с векторным управлением являются более точная и быстрая регулировка. Это важно в таких механизмах, где принцип действия связан с резким изменением нагрузки и крутящего момента на исполнительном органе.
Такая нагрузка характерна для токарных и других видов станков, в том числе с ЧПУ. Точность регулирования до 1,5%, диапазон регулировки 1:100, для большей точности с датчиками скорости и т.п. — 0,2% и 1:10000 соответственно.
На форумах бытует мнение, что на сегодняшний день разница в цене между векторными и скалярными частотниками меньше, чем была раньше (15-35% в зависимости от производителя), и основное отличие больше в прошивке, чем в схемотехнике. Также обратите внимание, что большинство векторных моделей также поддерживают скалярное управление.
Преимущества:
- большая стабильность и точность;
- более быстрая реакция на изменение нагрузки и высокий крутящий момент на низкой скорости;
- более широкий диапазон регулирования.
Главный недостаток — дороже скалярных.
В обоих случаях частоту можно задать вручную или с помощью датчиков, например, датчика давления или расходомера (если речь идет о насосах), потенциометра или энкодера.
Все или почти все преобразователи частоты имеют функцию плавного пуска, которая облегчает запуск двигателей от аварийных генераторов практически без риска его перегрузки.
Количество фаз
Кроме способов срабатывания частотники различаются количеством фаз на входе и выходе. Так различают преобразователи частоты с однофазным и трехфазным вводом.
При этом большинство трехфазных моделей могут питаться от одной фазы, но при таком применении их мощность снижается до 30-50%. Это связано с допустимой токовой нагрузкой на диоды и другие элементы силовой цепи. Однофазные модели доступны в диапазоне мощностей до 3 кВт.
Важно! Обратите внимание, что при однофазном подключении с напряжением 220В на входе будет на выходе 3 фазы 220В, а не 380В. То есть на линейном выходе будет ровно 220В, короче. В связи с этим обычные двигатели с обмотками, рассчитанными на напряжение 380/220В, необходимо соединить треугольником, а на 127/220В — звездой.
В сети можно найти много предложений типа «преобразователь частоты 220 на 380» — это в большинстве случаев маркетинг, продавцы называют любые три фазы «380В».
Чтобы получить реальные 380В от одной фазы, необходимо либо использовать однофазный трансформатор 220/380 (если вход преобразователя частоты рассчитан на такое напряжение), либо использовать специализированный преобразователь частоты с однофазным вводом и трехфазный выход 380 В.
Отдельным и более редким типом преобразователей частоты являются однофазные инверторы с однофазным выходом 220. Они предназначены для регулирования однофазных двигателей с конденсаторным пуском. Примером таких устройств являются:
- ЭРМАН ER-G-220-01
- ИННОВЕРТ IDD
Схема подключения
На самом деле, чтобы получить 3-фазный выход от преобразователя частоты 380 В, необходимо подключить 3-фазный вход 380 В:
Подключение частотника к одной фазе аналогично, кроме подключения питающих проводов:
Однофазный преобразователь частоты для двигателя с конденсатором (насос или маломощный вентилятор) подключается следующим образом:
Как видно на схемах, кроме питающих проводов и проводов к двигателю, преобразователь частоты имеет другие клеммы, датчики, кнопки пульта дистанционного управления, шины для подключения к компьютеру (обычно стандарта RS-485) , и так далее связаны с ними. Это дает возможность управлять двигателем по тонким сигнальным проводам, что позволяет убрать преобразователь частоты в электрощит.
Частотники — универсальные устройства, назначение которых не только регулировка скорости, но и защита электродвигателя от неправильных режимов работы и питания, а также от перегрузок. Помимо основной функции устройства реализуют плавный пуск приводов, что снижает износ оборудования и силовые нагрузки. Принцип работы и глубина настройки параметров большинства преобразователей частоты позволяет экономить электроэнергию при управлении насосами (ранее управление осуществлялось не за счет производительности насоса, а с помощью клапанов) и другим оборудованием.
На этом мы заканчиваем рассмотрение вопроса. Надеемся, что после прочтения статьи вы поймете, что такое преобразователь частоты и зачем он нужен. Напоследок рекомендуем посмотреть полезное видео по теме:
Наверняка вы не знаете:
- Как измерить частоту переменного тока
- Как работает магнитный пускатель
- Как выбрать частотник по мощности и току
Преобразователи частоты для асинхронных двигателей: принцип действия и принцип работы
Сегодня в промышленности часто используются преобразователи частоты для асинхронных двигателей. Стоит отметить, что такие двигатели имеют в своей конструкции три обмотки, которые соединяются по схеме «звезда» или «треугольник». Но у них есть один недостаток – очень сложно регулировать скорость вращения ротора. Но это было раньше. Теперь, когда на помощь приходит микро- и силовая электроника, эта задача упрощается. Поворотом переменного резистора можно изменять скорость вращения в широких пределах.
Для чего нужен преобразователь частоты?
Функций у этого устройства много, но чаще всего используется небольшое количество. По сути, для управления асинхронным двигателем нужно уметь регулировать не только скорость вращения, но и время разгона и торможения. Кроме того, любая система требует защиты. Необходимо, чтобы преобразователь частоты учитывал ток, потребляемый асинхронным двигателем.
Частое использование частоты в системах вентиляции. Несмотря на кажущуюся легкость крыльчатки вентилятора, нагрузки на ротор очень велики. И мгновенное ускорение невозможно. Бывают также ситуации, в которых необходимо увеличить скорость вращения, чтобы поток воздуха стал больше или меньше. Но это только пример, преобразователь частоты часто используется в других системах. С помощью частотника можно синхронизировать скорость конвейера, состоящего из нескольких лент.
Принцип работы инвертора
В основе лежит микропроцессорное управление и несколько схем преобразования переменного и постоянного напряжения. Несколько процессов происходят с напряжением, которое подается на вход питания устройства. Работа преобразователя частоты не сложная, достаточно рассмотреть три шага. Сначала происходит выпрямление. Во-вторых, фильтрация. В-третьих, инвертирование — это преобразование постоянного тока в переменный.
Только на последнем этапе возможно изменение свойств и параметров тока. Варьируя токовые характеристики, можно регулировать скорость вращения ротора асинхронного двигателя. В инверторном каскаде используются мощные сборки транзисторов. Эти элементы имеют три вывода – два силовых и один управляющий. Величина подаваемого на последний сигнала зависит от ВАХ на выходе частотника.
Как заменить инвертор?
Преобразователи частоты для асинхронных двигателей стали применяться относительно недавно. Но наука к ним шла постепенно, сначала меняли скорость вращения ротора с помощью шестерен или вариатора. Правда, это управление было очень громоздким, а мощность привода тратилась впустую из-за ненужных механизмов. Ременная передача помогла увеличить скорость вращения, но здесь указать окончательный параметр было очень сложно. По этим причинам использование преобразователя частоты намного выгоднее, поскольку позволяет избежать потерь мощности. Но самое главное — дает возможность изменять параметры привода без внесения каких-либо изменений в механику.
Какой диск выбрать для домашнего использования?
Стоит отметить, что подключение возможно к сети одно- и трехфазного тока. Все зависит от конкретной модели ПЧ, а точнее от того, какой тип инверторной схемы инвертора использовался в производстве. Чтобы понять принцип работы, достаточно взглянуть на устройство устройства. Самый первый узел – это выпрямитель, который собран на полупроводниковых диодах. Это мостовая схема для преобразования однофазного или трехфазного переменного тока в постоянный. Для использования в доме нужно выбирать те модели частотников, ввод которых подключен к однофазной сети переменного тока. Выбор связан с тем, что в частные дома провести трехфазную сеть проблематично, да и невыгодно, так как необходимо использовать более совершенные электросчетчики.
Основные узлы ПЧ
Мало что было сказано о том, что представляет собой схема преобразователя частоты. Но для детального изучения необходимо рассмотреть его подробнее. На первом этапе осуществляется преобразование – выпрямление переменного тока. Вне зависимости от того, сколько фаз подано на ввод (три или одна), на выходе выпрямителя вы получите постоянное однополярное (один плюс и один минус) напряжение 220 вольт. Это так много между фазой и нулем.
Далее идет блок фильтров, который помогает избавиться от всех переменных выпрямленного тока. И на самом последнем этапе происходит инвертирование — из постоянного тока делается переменный с помощью силовых транзисторов, управляемых микроконтроллером. Как правило, преобразователи частоты для асинхронных двигателей имеют монохромный ЖК-дисплей, на котором отображаются необходимые параметры.
Можно ли самому сделать устройство?
Изготовление этого устройства связано со многими трудностями. Вам необходимо изучить основы программирования микроконтроллеров, чтобы расширить возможности устройства. Важно учитывать все основные требования. Например, возможность автоматического аварийного отключения при превышении максимально допустимого тока, потребляемого двигателем. Для этого на выходе необходимо установить трансформаторы тока, которые будут осуществлять постоянный контроль. Также должно быть обеспечено активное и пассивное охлаждение всех силовых элементов системы — диодов и транзисторов, а также отключение устройства при чрезмерном нагреве. Только в этом случае можно безопасно эксплуатировать преобразователи частоты для асинхронных двигателей.
Ширина импульса цепи регулятора скорости двигателя. Типы и расположение регуляторов скорости для коллекторных двигателей
Электродвигатель необходим для плавного разгона и торможения. Широкое применение получили такие устройства в промышленности. С их помощью меняйте скорость конвейерных лент, вращение вентиляторов. Двигатели 12 Вольт используются в системах управления и автомобилях. Все видели переключатели, меняющие скорость вращения вентилятора печки в автомобилях. Это один из типов регуляторов. Только он не предназначен для плавной работы. Изменение скорости вращения происходит ступенчато.
Применение преобразователей частоты
Преобразователи частоты используются в качестве регуляторов скорости и 380В. Это высокотехнологичные электронные устройства, позволяющие кардинально менять характеристики тока (форму волны и частоту). В их основе мощные полупроводниковые транзисторы и широтно-импульсный модулятор. Вся работа устройства управляется блоком на микроконтроллере. Изменение скорости вращения ротора двигателя происходит плавно.
Поэтому используются в нагруженных механизмах. Чем медленнее ускорение, тем меньшую нагрузку будет испытывать конвейер или редуктор. Все частотники имеют несколько степеней защиты — по току, нагрузке, напряжению и другие. Некоторые модели преобразователей частоты питаются от однофазного напряжения (220 Вольт), делают его трехфазным. Это позволяет подключать асинхронные двигатели в домашних условиях без использования сложных схем. Да и мощность при работе с таким устройством не пропадет.
Для чего используются регуляторы?
В случае асинхронных двигателей регуляторы скорости необходимы для:
- Значительной экономии энергии . Ведь не каждый механизм требует высокой скорости вращения двигателя — иногда ее можно уменьшить на 20-30%, а это вдвое сократит энергозатраты.
- Защита механизмов и электронных схем . С помощью преобразователей частоты можно регулировать температуру, давление и многие другие параметры. Если двигатель работает как привод насоса, то в баке, в который он нагнетает воздух или жидкость, должен быть установлен датчик давления. А при достижении максимального значения мотор просто отключится.
- Достижения плавный пуск
. Нет необходимости использовать дополнительные электронные устройства – все можно сделать, изменив настройки преобразователя частоты. - Снижение затрат на техническое обслуживание . С помощью таких регуляторов скорости для электродвигателей 220В снижается риск выхода из строя привода и отдельных механизмов.
Схема, по которой построены преобразователи частоты, широко распространена во многих бытовых приборах. Нечто подобное можно найти в источниках бесперебойного питания, сварочных аппаратах, стабилизаторах напряжения, блоках питания компьютеров, ноутбуков, зарядных устройствах для телефонов, блоках розжига ламп подсветки современных ЖК-телевизоров и мониторов.
Как работают регуляторы вращения
Можно сделать регулятор скорости двигателя своими руками, но для этого потребуется изучить все технические моменты. Конструктивно выделяют несколько основных узлов, а именно:
- Электродвигатель.
- Микроконтроллерная система управления и преобразователь.
- Привод и механизмы, связанные с ним.
В самом начале работы после подачи напряжения на обмотки ротор двигателя вращается с максимальной мощностью. Именно эта особенность отличает асинхронные машины от других. К этому добавляется нагрузка от механизма, который приводится в движение. В результате на начальном этапе потребляемая мощность и ток увеличиваются до максимума.
Выделяется много тепла. И обмотки, и провода перегреваются. Избавиться от этого поможет использование преобразователя частоты. Если установить плавный пуск, то до максимальных оборотов (которые тоже регулируются прибором и могут быть не 1500 об/мин, а только 1000) двигатель будет разгоняться не сразу, а в течение 10 секунд (каждую секунду прибавлять по 100-150 оборотов). При этом значительно снизится нагрузка на все механизмы и провода.
Самодельный регулятор
Можно самостоятельно сделать регулятор скорости электродвигателя 12В. Для этого потребуется многопозиционный переключатель и проволочные резисторы. С помощью последнего изменяется напряжение питания (а вместе с ним и скорость вращения). Аналогичные системы можно использовать и для асинхронных двигателей, но они менее эффективны. Много лет назад широко применялись механические регуляторы – на основе зубчатых передач или вариаторов. Но они были не очень надежными. Электронные средства показывают себя гораздо лучше. Ведь они не такие громоздкие и позволяют более тонко настроить привод.
Для изготовления регулятора вращения двигателя вам потребуются несколько электронных устройств, которые можно либо приобрести в магазине, либо снять со старых инверторных устройств. Хорошие результаты показывает симистор ВТ138-600 в схемах подобных электронных устройств. Чтобы произвести регулировку, нужно включить в схему переменный резистор. С его помощью изменяется амплитуда сигнала, поступающего на симистор.
Внедрение системы менеджмента
Для улучшения параметров даже самого простого устройства потребуется включить микроконтроллер управления в схему регулятора скорости двигателя. Для этого нужно подобрать процессор с подходящим количеством входов и выходов — для подключения датчиков, кнопок, электронных ключей. Для экспериментов можно использовать микроконтроллер AtMega128 — самый популярный и простой в использовании. В открытом доступе можно найти много схем с использованием этого контроллера. Найти их самостоятельно и применить на практике несложно. Чтобы он работал корректно, вам нужно будет прописать в него алгоритм — ответы на определенные действия. Например, при достижении температуры 60 градусов (замер происходит на радиаторе прибора) питание должно отключиться.
Наконец
Если вы решили не делать устройство самостоятельно, а приобрести уже готовое, то обратите внимание на основные параметры, такие как мощность, тип системы управления, рабочее напряжение, частоты. Желательно рассчитать характеристики механизма, в котором планируется использовать регулятор напряжения двигателя. И не забудьте сравнить с параметрами преобразователя частоты.
Можно регулировать скорость вращения вала коллекторного электродвигателя малой мощности, последовательно включив его в свою силовую цепь. Но такой вариант создает очень низкий КПД, к тому же нет возможности плавно менять скорость вращения.
Главное, этот способ иногда приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор скорости электродвигателя
Цепи постоянного тока, описанные в этой статье, лишены этих недостатков. Эти схемы можно с успехом использовать и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4-х схем регуляторов скорости двигателя
Первая схема
Изменение скорости вращения переменным резистором R5, изменяющим длительность импульсов. Поскольку амплитуда импульсов ШИМ постоянна и равна напряжению питания электродвигателя, он никогда не останавливается даже при очень низкой скорости вращения.
Вторая схема
Аналогична предыдущей, но в качестве задающего генератора используется операционный усилитель DA1 (К140УД7).
Этот операционный усилитель работает как генератор напряжения, генерирующий треугольные импульсы с частотой 500 Гц. Переменным резистором R7 задают скорость вращения двигателя.
Третья схема
Она своеобразная, построена на ней. Задающий генератор работает на частоте 500 Гц. Ширина импульса и, соответственно, частота вращения двигателя могут изменяться от 2% до 9%.8%.
Слабое место всех вышеперечисленных схем в том, что они не имеют элемента стабилизации скорости при увеличении или уменьшении нагрузки на вал двигателя постоянного тока. Решить эту задачу можно следующей схемой:
Как и у большинства подобных регуляторов, в схеме данного регулятора имеется задающий генератор напряжения, формирующий импульсы треугольной формы с частотой 2 кГц. Вся специфика схемы заключается в наличии положительной обратной связи (ПОС) через элементы R12, R11, VD1, C2, DA1. 4, которая стабилизирует скорость вращения вала двигателя при увеличении или уменьшении нагрузки.
При налаживании цепи с определенным двигателем сопротивлением R12 выбирается такая глубина ПОС, при которой еще не возникают автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов оборотов двигателей
В данных схемах возможно применение следующих замен радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А можно заменить КТ117Б-Г или 2Н2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТЛ071, ТЛ081; таймер НЕ555 — С555, КР1006ВИ1; микросхема TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки ключевой транзистор КТ817 можно заменить на мощный полевой транзистор, например, IRF3905 или подобный.
Всем привет, наверное у многих радиолюбителей, как и у меня не одно хобби, а несколько. Помимо проектирования электронных устройств, я занимаюсь фотографией, съёмкой видео на DSLR камеру, монтажом видео. Мне, как видеооператору, нужен был слайдер для видеосъемки, и сначала я вкратце объясню, что это такое. На фото ниже показан заводской слайдер.
Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Они аналогичны рельсовой системе, используемой в широкоэкранном кино. С его помощью создается плавное движение камеры вокруг снимаемого объекта. Еще один очень мощный эффект, который можно использовать при работе с ползунком, — это возможность приблизиться или отдалиться от объекта. На следующем фото показан двигатель, который я выбрал для изготовления слайдера.
Ползунок приводится в действие двигателем постоянного тока 12 В. В интернете была найдена схема регулятора двигателя, который двигает каретку ползуна. На следующем фото индикатор питания на светодиоде, тумблер управляющий реверсом и выключатель питания.
При эксплуатации такого устройства важно, чтобы была плавная регулировка оборотов, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае использования нашего регулятора, плавно регулируется поворотом ручки переменного резистора на 5 кОм. Возможно не только я, один из пользователей этого сайта, увлекаюсь фотографией, а кто-то еще хочет повторить это устройство, желающие могут скачать архив со схемой и печатной платой регулятора в конце статья. На следующем рисунке показана принципиальная схема контроллера двигателя:
Схема регулятора
Схема очень проста и легко может быть собрана даже начинающим радиолюбителем. Из плюсов сборки данного устройства могу назвать его невысокую стоимость и возможность настройки под свои нужды. На рисунке показана печатная плата регулятора:
Но одними ползунками область применения данного регулятора не ограничивается, его легко можно использовать как регулятор скорости, например, дрель-машину, самодельный дремель, питание от 12 вольт, или компьютерный кулер, например, размерами 80 х 80 или 120 х 120 мм. Также я разработал схему реверсирования двигателя, или другими словами, быстрого изменения вращения вала в другую сторону. Для этого я использовал шестиконтактный тумблер с 2 положениями. На следующем рисунке показана схема его подключения:
Средние контакты тумблера, обозначенные (+) и (-), подключаются к контактам на плате, обозначенным М1.1 и М1.2, полярность значения не имеет. Всем известно, что компьютерные кулеры при таком напряжении питания и, соответственно, скорости вращения издают гораздо меньше шума при работе. На следующем фото транзистор КТ805АМ на радиаторе:
В схеме можно использовать практически любой средний и крупный транзистор. мощности n-p-n структур. Диод также можно заменить на подходящие по току аналоги, например, 1N4001, 1N4007 и другие. Выходы двигателя зашунтированы обратным диодом, это сделано для защиты транзистора в моменты включения и отключения схемы, так как двигатель является индуктивной нагрузкой. Также в схеме предусмотрена индикация включения ползунка на светодиоде, включенном последовательно с резистором.
При использовании двигателя большей мощности, чем показано на фото, транзистор необходимо прикрепить к радиатору для улучшения охлаждения. Фото получившейся платы показано ниже:
Обсудить статью РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С ЗАДНИМ
При использовании электродвигателя в инструментах одной из основных проблем является регулировка скорости их вращения. Если скорость недостаточно быстрая, то действие инструмента недостаточно эффективно.
Если он чрезмерно высок, то это приводит не только к значительному перерасходу электроэнергии, но и к возможному перегоранию прибора. При слишком высокой скорости вращения работа инструмента также может стать менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости.
Двигатель для электроинструментов и бытовых приборов обычно относится к одному из 2-х основных типов:
- коллекторные двигатели.
- Асинхронные двигатели.
В прошлом наиболее распространенной была вторая из этих категорий. Сейчас примерно 85% двигателей, которые используются в электроинструментах, бытовой или кухонной технике, относятся к коллекторному типу. Это объясняется тем, что они имеют большую степень компактности, они мощнее и процесс управления ими проще.
Работа любого электродвигателя построена по очень простому принципу: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси и пустить по ней постоянный ток, то рамка будет вращаться. Направление вращения определяется по «правилу правой руки».
Этот шаблон можно использовать для работы коллекторного двигателя.
Здесь важно подключить ток к этому кадру. Так как он вращается, то для этого используются специальные скользящие контакты. После того, как рамка повернется на 180 градусов, ток через эти контакты потечет в обратном направлении. Таким образом, направление вращения останется прежним. В этом случае плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков кадров.
Устройство
Коллекторный двигатель обычно состоит из ротора (якоря), статора, щеток и тахогенератора:
- Ротор — вращающаяся часть, статор — внешний магнит.
- Щетки графитовые — это основная часть скользящих контактов, через которые подается напряжение на вращающийся якорь.
- Тахогенератор — устройство, отслеживающее характеристики вращения. В случае нарушения равномерности движения корректирует напряжение, подаваемое на двигатель, тем самым делая его более плавным.
- статор может содержать не один магнит, а, например, 2 (2 пары полюсов). Также вместо статических магнитов здесь можно использовать катушки электромагнитов. Такой двигатель может работать как от постоянного, так и от переменного тока.
Удобство регулировки скорости вращения коллекторного двигателя определяется тем, что скорость вращения напрямую зависит от величины приложенного напряжения.
Кроме того, важной особенностью является то, что ось вращения может быть непосредственно присоединена к вращающемуся инструменту без использования промежуточных механизмов.
Если говорить об их классификации, то можно говорить о:
- коллекторные двигатели постоянного тока.
- коллекторные двигатели переменного тока.
В данном случае речь идет о том, каким именно током питаются электродвигатели.
Классификация также может производиться по принципу возбуждения двигателя. В коллекторном моторном устройстве электроэнергия подается как на ротор, так и на статор мотора (если в нем используются электромагниты).
Разница в том, как эти соединения организованы.
Здесь принято различать:
- параллельное волнение.
- Постоянное возбуждение.
- Параллельно-последовательное возбуждение.
Регулировка
Теперь поговорим о том, как можно отрегулировать скорость коллекторных двигателей. В связи с тем, что скорость вращения двигателя просто зависит от величины подаваемого напряжения, то для этого вполне подходят любые средства регулировки, способные выполнять эту функцию.
Вот несколько примеров таких вариантов:
- Лабораторный автотрансформатор (ЛАТР).
- Заводские регулировочные доски , используемые в бытовых приборах (вы можете использовать, в частности, те, которые используются в миксерах или пылесосах).
- Кнопки используются в конструкции электроинструмента.
- Бытовые регуляторы освещения с плавным ходом.
Однако у всех вышеперечисленных способов есть очень важный недостаток. Вместе с уменьшением скорости снижается и мощность двигателя. В некоторых случаях его можно остановить даже рукой. В некоторых случаях это может быть приемлемо, но в большинстве случаев это серьезное препятствие.
Хорошим вариантом является регулирование скорости с помощью тахогенератора. Обычно устанавливается на заводе. В случае отклонений скорости двигателя на двигатель подается уже скорректированное питание, соответствующее заданной скорости. Если в эту схему встроено управление вращением двигателя, то потери мощности здесь не будет.
Как он выглядит конструктивно? Наиболее распространена реостатная регулировка вращения, выполненная на основе использования полупроводников.
В первом случае речь идет о переменном сопротивлении с механической регулировкой. Он подключается последовательно к коллекторному двигателю. Недостатком является дополнительное выделение тепла и дополнительная трата времени автономной работы. При таком способе регулировки происходит потеря мощности вращения двигателя. Является дешевым решением. Неприменимо для достаточно мощных двигателей по указанным причинам.
Во втором случае при использовании полупроводников управление двигателем осуществляется подачей определенных импульсов. Схема может изменять длительность таких импульсов, что в свою очередь изменяет скорость вращения без потери мощности.
Как сделать своими руками?
Существуют различные варианты схем регулирования. Рассмотрим один из них подробнее.
Вот схема его работы:
Изначально это устройство разрабатывалось для регулировки коллекторного двигателя на электромобилях. Речь шла об одном, где напряжение питания 24 В, но такая конструкция применима и к другим двигателям.
Слабое место схемы, которое было выявлено при проверке ее работоспособности, — плохая пригодность при очень больших токах. Это связано с некоторым замедлением работы транзисторных элементов схемы.
Рекомендуется, чтобы ток был не более 70 А. В этой цепи нет защиты по току и температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации будет 5 кГц, она определяется конденсатором С2 емкостью 20 нФ.
При изменении силы тока эта частота может изменяться в пределах от 3 кГц до 5 кГц. Переменный резистор R2 используется для регулирования тока. При использовании электродвигателя в бытовых условиях рекомендуется использовать регулятор стандартного типа.
При этом рекомендуется подобрать значение R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее поступает на транзисторы.
Печатная плата имеет размер 50 на 50 мм и выполнена из одностороннего стеклотекстолита:
На этой схеме дополнительно указаны 2 резистора по 45 Ом. Это сделано для того, чтобы по возможности подключить обычный компьютерный вентилятор для охлаждения устройства. При использовании электродвигателя в качестве нагрузки необходимо блокировать цепь блокировочным (снабберным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению напряжения питания.
Работа устройства при отсутствии такого диода может привести к его повреждению из-за возможного перегрева. В этом случае диод нужно будет разместить на радиаторе. Для этого можно использовать металлическую пластину, площадь которой составляет 30 см2.
Регулирующие ключи работают так, что потери мощности на них очень малы. В оригинальной схеме AT использовался стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Устройство в собранном виде выглядит так:
При изготовлении блока питания (на нижнем рисунке) провода должны быть соединены таким образом, чтобы в этих проводниках было минимум изгибов через которые проходят большие токи. Мы видим, что изготовление такого устройства требует определенных профессиональных знаний и навыков. Возможно, в некоторых случаях есть смысл использовать покупное устройство.
Критерии выбора и стоимость
Чтобы правильно выбрать наиболее подходящий тип регулятора, необходимо хорошо представлять, какие разновидности таких устройств бывают:
- Различные виды управления. Может быть векторной или скалярной системой управления. Первые используются чаще, а вторые считаются более надежными.
- Мощность регулятора должна соответствовать максимально возможной мощности двигателя.
- По напряжению удобно выбрать прибор, обладающий наиболее универсальными свойствами.
- Частотные характеристики. Подходящий вам регулятор должен соответствовать самой высокой частоте, которую использует двигатель.
- Прочие характеристики. Здесь речь идет о размере гарантийного срока, габаритах и других характеристиках.
В зависимости от назначения и потребительских свойств цены на регуляторы могут существенно различаться.
В большинстве своем они находятся в диапазоне примерно от 3,5 тыс. руб. до 9тыс.:
- Регулятор скорости КА-18 ESC предназначен для моделей масштаба 1:10. Стоит 6890 рублей.
- Регулятор скорости MEGA коллектор (водонепроницаемый). Стоит 3605 руб.
- Регулятор скорости для моделей LaTrax 1:18. Его цена 5690 руб.
На простые механизмы удобно устанавливать аналоговые регуляторы тока. Например, они могут изменять скорость вращения вала двигателя. С технической стороны сделать такой регулятор несложно (потребуется установить один транзистор). Применяется для независимой регулировки скорости двигателей в робототехнике и источниках питания. Двумя наиболее распространенными типами регуляторов являются одноканальные и двухканальные.
Видео №1. Одноканальный контроллер в действии. Изменяет скорость вращения вала двигателя поворотом ручки переменного резистора.
Видео №2. Увеличение скорости вращения вала двигателя при работе одноканального регулятора. Увеличение числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3. Двухканальный контроллер в действии. Независимая установка скорости вращения валов двигателя на основе подстроечных резисторов.
Видео №4. Напряжение на выходе регулятора измеряется цифровым мультиметром. Полученное значение равно напряжению батареи, из которого вычтено 0,6 вольта (разница возникает из-за падения напряжения на переходе транзистора). При использовании батареи на 9,55 вольт фиксируется изменение от 0 до 8,9 вольт.
Функции и основные характеристики
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для увеличения нагрузочной способности транзистор КТ815А заменен с КТ9Транзистор 72А. Нумерация выводов у этих транзисторов одинаковая (e-k-b). А вот модель КТ972А работоспособна с токами до 4А.
Одноканальный контроллер двигателя
Устройство управляет одним двигателем, питаемым от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: двух резисторов переменного сопротивления сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистора модели КТ815А (№3), пары двухсекционных винтовых клеммные колодки для выхода для подключения двигателя (№4) и входа для подключения аккумулятора (№5).
Примечание 1.
Винтовые клеммы не требуются. С помощью тонкого установочного многожильного провода можно напрямую подключить двигатель и блок питания.
Принцип работы
Порядок работы контроллера мотора описан на электрической схеме (рис. 1). С учетом полярности на разъем XT1 подается постоянное давление. К разъему XT2 подключается лампочка или двигатель. На вход включен переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в отличие от минуса батареи. Через ограничитель тока R2 средний вывод соединен с базовым выводом транзистора VT1. В этом случае транзистор включен по схеме постоянного тока. Положительный потенциал на базовом выводе увеличивают перемещением вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, что связано с уменьшением сопротивления перехода коллектор-эмиттер в транзисторе VT1. Потенциал уменьшится, если ситуация изменится на противоположную.
Принципиальная схема
Материалы и детали
Потребуется печатная плата размером 20х30 мм, изготовленная из ламинированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 перечислены радиодетали.
Примечание 2.
Необходимый для устройства переменный резистор может быть любого производства, важно соблюдать для него значения сопротивления тока, указанные в таблице 1.
Примечание 3 .
Для регулировки токов выше 1,5А транзистор КТ815Г заменен на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не нужно, так как разводка выводов у обоих транзисторов идентична.
Процесс сборки
Для дальнейшей работы необходимо скачать архивный файл, расположенный в конце статьи, разархивировать и распечатать. Чертеж регулятора печатается на глянцевой бумаге (файл), а монтажный чертеж (файл) — на белом офисном листе (формат А4).
Далее чертеж печатной платы (№1 на фото. 4) приклеивается к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). На установочном чертеже в посадочных местах необходимо сделать отверстия (№3 на фото. 14). Сборочный чертеж крепится к печатной плате на сухой клей, при этом отверстия должны совпадать. На фото.5 представлена цоколевка транзистора КТ815.
Входы и выходы клеммников-розеток отмечены белым цветом. Источник напряжения подключается к клеммной колодке через зажим. На фото показан полностью собранный одноканальный регулятор. Блок питания (9вольтовая батарея) подключается на завершающем этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо распечатать чертеж диска из архива. Далее нужно наклеить этот рисунок (№1) на плотную и тонкую картонную бумагу (№2). Затем с помощью ножниц вырезается диск (№3).
Полученную заготовку переворачивают (№1) и прикрепляют к центру квадрат черной изоленты (№2) для лучшего сцепления поверхности вала двигателя с диском. Вам нужно сделать отверстие (№3), как показано на изображении. Затем диск устанавливается на вал двигателя и можно приступать к испытаниям. Одноканальный контроллер мотора готов!
Двухканальный контроллер двигателя
Используется для одновременного независимого управления парой двигателей. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на канал.
- Конструкция устройства
Основные узлы конструкции показаны на фото.10 и включают в себя: два триммера для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для вывода на 2-й мотор (№3), для выхода на 1-й мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клемм не является обязательной. С помощью тонкого установочного многожильного провода можно напрямую подключить двигатель и блок питания.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис. 2). Основное отличие: резистор переменного сопротивления заменен на подстроечный. Скорость вращения валов задается заранее.
Примечание.2. Для быстрой регулировки скорости вращения двигателей подстроечные резисторы заменяют монтажным проводом с резисторами переменного сопротивления с указанными на схеме значениями сопротивлений.
Материалы и детали
Вам потребуется печатная плата размером 30х30 мм, изготовленная из листа стеклотекстолита толщиной 1-1,5 мм, фольгированного с одной стороны. В таблице 2 перечислены радиодетали.
Процесс сборки
После скачивания архивного файла, расположенного в конце статьи, его необходимо разархивировать и распечатать. Чертеж регулятора для термопереноса (файл термо2) распечатывается на глянцевой бумаге, а монтажный чертеж (файл montag2) — на белом офисном листе (формат А4).
Чертеж печатной платы приклеивается к токоведущим дорожкам на противоположной стороне печатной платы. По установочному чертежу в посадочных местах формируются отверстия. Сборочный чертеж крепится к печатной плате на сухой клей, при этом отверстия должны совпадать. Делается цоколевка транзистора КТ815. Для проверки временно соедините входы 1 и 2 монтажным проводом.
Любой из вводов подключен к полюсу питания (в примере показано 9вольтовая батарея). Минус источника питания крепится к центру клеммной колодки. Важно помнить: черный провод – это «-», а красный – «+».
Двигатели должны быть подключены к двум клеммным колодкам, также необходимо установить желаемую скорость. После успешных испытаний нужно снять временное подключение входов и установить устройство на модель робота. Двухканальный контроллер мотора готов!
В представлены необходимые схемы и чертежи для работы. Эмиттеры транзисторов отмечены красными стрелками.
Регулировка скорости вращения асинхронного электродвигателя 220в. Регулировка оборотов асинхронного двигателя
регулировка скорости электродвигателя часто необходима как в промышленных, так и в бытовых целях. В первом случае используются промышленные регуляторы напряжения – для уменьшения или увеличения скорости. А с вопросом, как регулировать скорость электродвигателя в домашних условиях, попробуем разобраться подробнее.
Сразу нужно сказать, что для разных типов однофазных и трехфазных электромобилей необходимо использовать разные регуляторы мощности. Те. для асинхронных машин неприемлемо применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей.
Лучший способ снизить скорость вашего устройства — не регулировать обороты самого двигателя, а через редуктор или ременную передачу. Это позволит сэкономить самое главное — мощность устройства.
Немного теории о конструкции и области применения коллекторных двигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением (для переменного тока используются только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходя через обмотки статора и ротора, соединенные определенным образом, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается с помощью щеток из мягкого токопроводящего материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, то вал начнет вращаться в противоположном направлении, и это всегда делается с выводами ротора, чтобы не произошло перемагничивания сердечников.
При одновременно Изменение соединения ротора и статора не реверсирует. Есть еще трехфазные коллекторные двигатели, но это совсем другая история.
Двигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статор) в двигателе с параллельным возбуждением состоит из большого числа витков тонкого провода и соединена параллельно с ротором, сопротивление обмотки которого значительно меньше. Поэтому для уменьшения тока при пуске электродвигателей мощностью более 1 кВт в цепь ротора включают пусковой реостат. Регулирование скорости двигателя при такой схеме включения производится изменением тока только в цепи статора, т.к. способ понижения напряжения на зажимах не очень экономичен и требует применения регулятора большой мощности.
Если нагрузка небольшая, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти «вразнос»
Двигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет малое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаковым. Электродвигатели этого типа более выносливы при перегрузках и поэтому чаще всего встречаются в бытовой технике.
Регулирование скорости двигателя постоянного тока с последовательно соединенной обмоткой статора можно осуществить двумя способами:
- Подключив параллельно статору регулирующее устройство, изменяющее магнитный поток. Однако этот метод достаточно сложен в реализации и не используется в бытовых устройствах.
- Регулирование (снижение) оборотов путем снижения напряжения. Этот метод используется практически во всех электротехнических устройствах — бытовых приборах, инструментах и т. д.
Коллекторные двигатели переменного тока
Эти однофазные двигатели имеют меньший КПД, чем двигатели постоянного тока, но из-за простоты изготовления и схемы управления они получили наибольшее распространение в бытовой технике и электроинструменте. Их можно назвать «универсальными», поскольку они способны работать как с переменным, так и с постоянным током. Это связано с тем, что при включении в сеть переменного напряжения направление магнитного поля и тока будут изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных двигателях переменного тока используются дополнительные полюса и компенсационные обмотки. В двигателях бытовой техники таких устройств нет.
Регуляторы скорости двигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев строятся на тиристорных регуляторах, ввиду их простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивает и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, которая, в свою очередь, зависит от положения двигателя с переменным сопротивлением. Эта схема не снабжена обратной связью, т.е. при изменении нагрузки будут изменяться и обороты и их придется регулировать. По такой же схеме контролируется оборот импортных бытовых пылесосов.
При постоянном росте автоматизации в бытовой сфере возникает потребность в современных системах и устройствах для управления электродвигателями.
Управление и преобразование частоты в однофазных асинхронных двигателях малой мощности, запуск которых осуществляется с помощью конденсаторов, экономит электроэнергию и активирует энергосберегающий режим на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, индуцируемых им в роторе двигателя. При разнице частот вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя.
Обмотка стартера занимает в конструкции статора 1/3 паза, на основную обмотку приходится 23 паза статора.
Ротор однофазного двигателя с коротким замыканием, помещенный в фиксированное магнитное поле статора, начинает вращаться.
Рис.№1 Принципиальная схема двигателя, демонстрирующая принцип работы однофазного асинхронного двигателя.
Основные типы однофазных электроприводов
Кондиционеры, холодильные компрессоры, электровентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, стиральные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное напряжение в постоянное давление. Они используются для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращением асинхронных двигателей.
Регулятор скорости однофазного двигателя
Существует несколько способов управления скоростью вращения однофазного двигателя.
- Контроль скольжения двигателя или изменения напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели большой мощности. Недостатком этого метода является нагрев обмоток двигателя.
- Ступенчатая регулировка оборотов двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы — выходное напряжение имеет чистую синусоиду. Перегрузочная способность трансформатора имеет большой запас мощности.
Недостатки — автотрансформатор имеет большие габаритные размеры.
Использование тиристора. Используются тиристорные ключи, включенные встречно-параллельно.
Рис. №3. Схема тиристорного регулирования однофазного асинхронного двигателя.
При использовании для управления скоростью вращения однофазных асинхронных двигателей во избежание негативного влияния индукционной нагрузки выполняется модификация схемы. Для защиты силовых ключей добавлены цепи LRC, для коррекции волны напряжения используется конденсатор, минимальная мощность двигателя ограничена, поэтому запуск двигателя гарантирован. Тиристор должен иметь ток выше, чем ток электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с использованием выходного каскада, построенного на применении полевых или биполярных IGBT-транзисторов.
Рис. № 4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным методом регулирования мощности, КПД, быстродействия и показателей энергосбережения.
Рис. №5. Схема управления двигателем без исключения в конструкции конденсатора.
Преобразователь частоты: виды, принцип действия, электрические схемы
Позволяет своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты: выпрямитель, конденсатор, IGBT транзисторы в выходном каскаде.
Благодаря возможности управления параметрами выходной частоты и напряжения достигается хороший эффект энергосбережения. Энергосбережение выражается в следующем:
- Двигатель поддерживает постоянный текущий момент расширения вала. Это связано с взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и, соответственно, зависимостью напряжения и момента на валу двигателя. Это означает, что преобразователь позволяет автоматически регулировать выходное напряжение при обнаружении превышения нормального значения напряжения с определенной рабочей частотой, необходимой для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного крутящего момента на валу.
- Преобразователь частоты служит для регулирования работы насосных агрегатов (). При получении сигнала от датчика давления преобразователь частоты снижает производительность насосного агрегата. При уменьшении оборотов двигателя выходное напряжение уменьшается. Итак, для стандартного водопотребления насоса требуется промышленная частота 50Гц и напряжение 400В. На основании формулы мощности можно рассчитать коэффициент потребляемой мощности.
При снижении частоты до 40Гц напряжение уменьшается до 250В, а значит уменьшается число оборотов вращения насоса и снижается потребление энергии в 2,56 раза.
Рис. № 6. Использование преобразователя частоты Speedrive для управления насосными агрегатами по системе CKEA MULTI 35.
Для повышения энергоэффективности использования необходимо сделать следующее:
- Преобразователь частоты должен соответствовать параметрам электродвигателя.
- Частотный канал выбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Итак, частотник для насосов работает в соответствии с параметрами, заложенными в программе управления работой насоса.
- Точные настройки управления в ручном и автоматическом режиме.
- Преобразователь частоты позволяет использовать режим энергосбережения.
- Режим векторного управления позволяет выполнять автоматическую настройку управления двигателем.
Однофазный преобразователь частоты
Компактное устройство преобразования частоты для управления однофазными двигателями для бытовой техники. Большинство преобразователей частоты имеют следующие конструктивные особенности:
- В конструкции большинства моделей используется новейшая технология векторного управления.
- Они обеспечивают улучшенный крутящий момент однофазного двигателя.
- Энергосбережение установлено на автоматический режим.
- В некоторых моделях преобразователей частоты используется съемная панель управления.
- Встроенный контроллер ПЛК (незаменим при создании устройств сбора и передачи данных, для создания систем телеметрии, объединяет в общую сеть устройства с различными протоколами и интерфейсами связи).
- Встроенный ПИД-регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Выходное напряжение регулируется автоматически.
Рис. № 7. Современный инвертор Optidrive с основными функциями.
Важно: Однофазный преобразователь частоты, питающийся от однофазной сети 220В, выдает три линейных напряжения, каждая из которых имеет напряжение 220В. То есть линейное напряжение между двумя фазами напрямую зависит от величины выходного напряжения самого преобразователя частоты.
Преобразователь частоты не служит для двойного преобразования напряжения, из-за наличия в конструкции ШИМ-регулятора он может поднять значение напряжения не более чем на 10%.
Основной задачей однофазного преобразователя частоты является обеспечение питанием как однофазного, так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети и останется постоянным
Регулирование частоты однофазных асинхронных двигателей
Первое, на что мы обращаем внимание при выборе частотника для вашего оборудования, это соответствие напряжения сети и номинального значения тока нагрузки, на которую рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главное в схеме подключения наличие фазосдвигающего конденсатора, он служит для смещения напряжения подаваемого на пусковую обмотку. Служит для запуска двигателя, иногда после запуска двигателя пусковая обмотка вместе с конденсатором выключается, иногда остается включенной.
Схема подключения однофазного двигателя с использованием однофазного преобразователя частоты без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению преобразователя частоты, то есть будет три линейных напряжения, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема подключения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах частоты инвертора. Частота обеспечит равномерный фазовый сдвиг. Для того чтобы исключить конденсатор из схемы нужно:
- Пусковой конденсатор С1 удален.
- Выход обмотки двигателя подключен к точке выхода напряжения преобразователя частоты (используется прямая проводка).
- Точка A присоединяется к CA; B соединяется с NE; W подключен к SS, поэтому электродвигатель будет подключаться напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо подключить Б к УЦ; И прикрепить к СВ; W соединиться с СС.
Рис. № 9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Преобразователь частоты. в однофазной сети 220В
9Регулятор частоты вращения двигателя 0312 220в позволяет изменять частоту любого электродвигателя, предназначенного для работы от сети 220 вольт.
Довольно популярный регулятор скорости электродвигателей переменного тока 220 вольт — тиристорная схема. Типичная схема заключается в подключении электродвигателя или вентилятора для разрыва цепи анода тиристора.
Немаловажным условием при использовании таких регуляторов является надежный контакт во всей цепи. Чего нельзя сказать о коллекторных двигателях, ведь они имеют щеточный механизм, создающий кратковременные разрывы в электрической цепи. Это существенно влияет на качество регулятора.
Описание схемы регулятора скорости
Приведенная ниже схема тиристор регулятор скорости , так же предназначен для изменения коллектора скорости электродвигателей (электродрель, фреза, вентилятор ) Первое, на что следует обратить внимание, это то, что двигатель вместе с силовым тиристором VS2 , к одной из диагоналей подключен диодный мост VD3, на другую подается напряжение сети 220 вольт .
Кроме того, этот тиристор управляется достаточно широкими импульсами, благодаря чему кратковременные отключения активной нагрузки, характеризующие работу коллекторного двигателя, не влияют на устойчивую работу этой схемы.
Для управления тиристором VS1 на транзисторе VT1 собран генератор импульсов. Этот генератор питается трапециевидным напряжением, возникающим за счет ограничения положительных полуволн стабилитроном VD1, имеющим частоту 100 Гц. Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистор R1 — скорость разряда этого конденсатора.
Когда напряжение на конденсаторе достаточно для открытия транзистора VT1, на управляющий вывод VS1 подается положительный импульс. Тиристор открывается и теперь на управляющем выводе VS2 появляется длинный управляющий импульс. И уже с этого тиристора на двигатель подается напряжение, которое собственно и влияет на скорость.
Скорость вращения электродвигателя регулируется резистором R1. Поскольку индуктивная нагрузка подключена к цепи VS2, возможно самопроизвольное отпирание тиристора даже при отсутствии управляющего сигнала. Поэтому для предотвращения этого нежелательного эффекта в схему добавлен диод VD2, включенный параллельно обмотке возбуждения L1 электродвигателя.
Детали регулятора скорости вращения вентилятора и электродвигателя
Стабилитрон — можно заменить на другой с напряжением стабилизации в районе 27 — 36В. Тиристоры ВС1 — любые маломощные на постоянное напряжение более 100 вольт, ВС2 — можно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 — с обратным напряжением не менее 400 вольт и прямым током более 0,3А. Конденсатор С1 — КМ-6.
Настройка регулятора скорости
При настройке схемы регулятора целесообразно использовать стробоскоп, допускающий либо стрелочный вольтметр переменного тока, который включается параллельно двигателю.
Вращая ручку резистора R1, определяют диапазон напряжения. Подбором сопротивления R3 этот диапазон устанавливается в районе от 90 до 220 вольт. В том случае, если двигатель вентилятора работает нестабильно на минимальных оборотах, необходимо немного уменьшить сопротивление R2.
Для плавного увеличения и уменьшения скорости вращения вала предусмотрено специальное устройство — регулятор скорости вращения электродвигателя 220в. Стабильная работа, отсутствие перебоев с электричеством, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольта.
- Область применения
- Выберите устройство
- Устройство ПЧ
- Типы устройств
- Симистор устройства
Зачем нужен преобразователь частоты
Функция регулятора инвертировать напряжение 12, 24 вольта, обеспечивая плавный пуск и остановку с помощью широтно-импульсной модуляции.
Регуляторы скорости входят в состав многих устройств, так как обеспечивают точность электрического регулирования. Это позволяет регулировать скорость до нужного значения.
Область применения
Регулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводов оборудования;
- ;
- печи электрические;
- пылесосы;
- швейные машины;
- стиральные машины.
сварочный аппарат
Выберите устройство
Чтобы выбрать эффективный регулятор, необходимо учитывать характеристики устройства, особенности назначения.
- Для коллекторных двигателей распространены векторные контроллеры, но скалярные более надежны.
- Важным критерием выбора является мощность. Оно должно соответствовать допустимому на используемом агрегате. А лучше превысить для безопасной работы системы.
- Напряжение должно находиться в допустимых широких пределах.
- Основным назначением регулятора является преобразование частоты, поэтому этот аспект необходимо выбирать в соответствии с техническими требованиями.
- Также необходимо обратить внимание на срок службы, размер, количество вводов.
ПЧ-устройство
- Регулятор электродвигателя переменного тока;
- ;
- дополнительных предметов.
привод
Схема регулятора оборотов двигателя 12 в показана на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор можно приобрести в специализированных точках продаж, а можно сделать своими руками.
При пуске трехфазного двигателя на полную мощность передается ток, действие повторяется около 7 раз. Сила тока изгибает обмотки двигателя, со временем выделяется тепло. Преобразователь представляет собой инвертор, обеспечивающий преобразование энергии. Напряжение поступает на регулятор, где 220 вольт выпрямляются с помощью диода, расположенного на входе. Затем ток фильтруется 2-мя конденсаторами. формируется ШИМ. Далее импульсный сигнал передается с обмоток двигателя на определенную синусоиду.
Есть универсальное устройство 12В для бесколлекторных двигателей.
Схема состоит из двух частей: логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными типами двигателей. Питание цепей отдельное, для драйверов ключей требуется питание 12В.
Типы устройств
Приборный симистор
Симисторное устройство (триак) используется для управления освещением, мощностью нагревательных элементов и скоростью вращения.
Схема регулятора на симисторе содержит минимум деталей, показанных на рисунке, где С1 — конденсатор, R1 — первый резистор, R2 — второй резистор.
С помощью преобразователя мощность регулируется изменением времени открытого симистора. Если он замкнут, конденсатор заряжается с помощью нагрузки и резисторов. Один резистор регулирует величину тока, а второй регулирует скорость заряда.
При достижении конденсатором порога напряжения 12В или 24В происходит срабатывание ключа. Symistra переходит в открытое состояние. При переходе сетевого напряжения через ноль симистор закрывается, тогда конденсатор дает отрицательный заряд.
Преобразователи электронных ключей
Общий тиристорный регулятор с простой схемой.
Тиристор, работает в сети переменного тока.
Отдельный вид — стабилизатор переменного напряжения. Стабилизатор содержит трансформатор с многочисленными обмотками.
К источнику напряжения 24 вольта. Принцип работы — заряд конденсатора и запертый тиристор, а когда конденсатор достигает напряжения, тиристор подает ток в нагрузку.
Процесс пропорционального сигнала
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085, изображенная выше, обеспечивает управление двигателем 12в, обратная связь 24в без потери мощности. Обязательным является обслуживание тахометра, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал спидометра поступает на микросхему, которая передает силовым элементам задачу — добавить напряжение на мотор. Когда вал загружен, плата добавляет напряжение, и мощность увеличивается. При отпускании вала напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота регулируется в широком диапазоне. Такой мотор на 12, 24 вольта устанавливают в стиральные машины.
Своими руками можно сделать устройство для измельчителя, токарный станок по дереву, измельчитель, бетономешалка, измельчитель соломы, газонокосилка, дровокол и многое другое.
Промышленные регуляторы, состоящие из регуляторов на 12, 24 вольта, залиты смолой, поэтому ремонту не подлежат. Поэтому устройство на 12в часто изготавливают самостоятельно. Простой вариант с использованием микросхемы U2008B. Контроллер использует обратную связь по току или плавный пуск. В случае использования последнего необходимы элементы С1, R4, перемычка Х1 не нужна, с обратной связью наоборот.
При сборке регулятора правильно подобрать резистор. Так как при большом резисторе могут быть рывки при старте, а при маленьком резисторе компенсация будет недостаточной.
Важно! При настройке регулятора мощности нужно помнить, что все части устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Однофазные и регуляторы скорости Трехфазные двигатели 24, 12 вольт являются функциональным и ценным устройством, как в быту, так и в промышленности.
Схема регулятора, с помощью которого осуществляется частота вращения двигателя или вентилятора, рассчитана на работу от сети переменного тока 220 вольт.
Двигатель вместе с силовым тиристором VS2 подключается к диагонали диодного моста VD3, а другой получает переменное напряжение 220 вольт. Кроме того, этот тиристор отслеживает достаточно широкие импульсы, благодаря чему обрывы короткого замыкания, с которыми работают все коллекторные двигатели, не влияют на устойчивую работу схемы.
Первый тиристор управляется транзистором VT1, включенным по схеме генератора импульсов. Как только напряжение на конденсаторе станет достаточным для открытия первого транзистора, на управляющий вывод тиристора поступит положительный импульс. Тиристор откроется и теперь на втором тиристоре появится длинный управляющий импульс. А уже от него на двигатель подается напряжение, которое собственно и влияет на скорость.
Скорость вращения двигателя регулируется переменным сопротивлением R1. Поскольку индуктивная нагрузка подключена к цепи второго тиристора, возможно самопроизвольное открытие тиристора даже при отсутствии управляющего сигнала. Поэтому для блокировки этого в схему включен диод VD2, который включен параллельно обмотке двигателя L1.
При настройке схемы регулятора оборотов двигателя целесообразно использовать способный измерять частоту вращения электродвигателя или обычный стрелочный вольтметр переменного тока, который включается параллельно двигателю.
С помощью подбора сопротивления R3 устанавливается диапазон напряжения от 90 до 220 вольт. Если двигатель не работает на минимальных оборотах, то номинал резистора R2 необходимо уменьшить.
Эта схема хорошо подходит для регулировки скорости вращения вентилятора в зависимости от температуры.
В роли чувствительного элемента используется. В результате его нагрева его сопротивление уменьшается, а потому на выходе операционного усилителя, наоборот, увеличивается напряжение и через полевой транзистор управляет скоростью вращения вентилятора.
Переменное сопротивление P1 — можно установить самую низкую скорость вращения вентилятора при самой низкой температуре, а переменное сопротивление P2 управлять самой высокой скоростью вращения при максимальной температуре.
В нормальных условиях выставляем резистор Р1 на минимальные обороты двигателя. Затем датчик нагревается и сопротивление P2 задает нужную скорость вращения вентилятора.
Схема управляет скоростью вращения вентилятора в зависимости от показаний температуры, используя обычный с отрицательным температурным коэффициентом.
Схема настолько проста, что в ней всего три радиодетали: регулируемый стабилизатор напряжения LM317T и два сопротивления, образующие делитель напряжения. Одно из сопротивлений — терморезистор с отрицательным ТКС, а другое — обычный резистор. Для упрощения сборки ниже привожу печатную плату.
В целях экономии можно оборудовать стандартную кофемолку регулятором скорости. Такой регулятор для шлифовки корпусов различной электронной аппаратуры незаменимый помощник в арсенале радиолюбителя
Все современные дрели выпускаются со встроенными регуляторами оборотов двигателя, но наверняка у каждого радиолюбителя в арсенале есть старая советская дрель, изменение оборотов которой было не придумано, что резко снижает производительность.
Можно регулировать скорость вращения асинхронного бесколлекторного двигателя, регулируя частоту питающего переменного напряжения. Эта схема позволяет регулировать скорость вращения в достаточно широком диапазоне – от 1000 до 4000 оборотов в минуту.
Цифровой ШИМ-регулятор оборотов коллекторного двигателя. Регулятор вращения двигателя
При использовании электродвигателя в инструментах одной из серьезных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то инструмент недостаточно эффективен.
Если она завышена, то это приводит не только к значительной трате электроэнергии, но и к возможному перегоранию прибора. Если скорость слишком высока, производительность инструмента также может стать менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости.
Двигатель для электроинструмента и бытовой техники обычно относится к одному из 2-х основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом наибольшее распространение имела вторая из этих категорий… Сейчас около 85% двигателей, которые используются в электроинструментах, бытовой или кухонной технике, относятся к коллекторному типу. Это объясняется тем, что они имеют большую степень компактности, они мощнее и процесс управления ими проще.
Работа любого электродвигателя основана на очень простом принципе: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси, и пропустить через нее постоянный ток, то рама получится. Направление вращения определяется по «правилу правой руки».
Эта схема может использоваться для работы с коллекторным двигателем.
Важным моментом здесь является подключение тока к этой рамке. Так как он вращается, то для этого используются специальные скользящие контакты. После поворота рамки на 180 градусов ток через эти контакты протекает в обратном направлении. Таким образом, направление вращения остается прежним. При этом плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков кадров.
Устройство
Коллекторный двигатель обычно состоит из ротора (якоря), статора, щеток и тахогенератора:
- Ротор — вращающаяся часть, статор — внешний магнит.
- Щетки из графита — это основная часть скользящих контактов, через которые подается напряжение на вращающийся якорь.
- Тахогенератор Устройство, отслеживающее характеристики вращения. При нарушении равномерности движения корректирует поступающее на двигатель напряжение, тем самым делая его более плавным.
- Статор может содержать не один магнит, а, например, 2 (2 пары полюсов). Также вместо статических магнитов здесь можно использовать катушки электромагнита. Такой двигатель может работать как от постоянного, так и от переменного тока.
Удобство регулировки скорости вращения коллекторного двигателя определяется тем, что скорость вращения напрямую зависит от величины приложенного напряжения.
Кроме того, важной особенностью является то, что ось вращения может быть непосредственно присоединена к вращающимся инструментам без использования промежуточных механизмов.
Если говорить об их классификации, то можно говорить о:
- Щёточные двигатели постоянного тока.
- Щеточные двигатели переменного тока.
В данном случае речь идет о том, каким током питаются электродвигатели.
Классификация также может производиться по принципу двигательного возбуждения. В устройстве коллекторного двигателя питание подается как на ротор, так и на статор двигателя (если в нем используются электромагниты).
Разница в том, как эти соединения организованы.
Принято различать:
- Параллельное возбуждение.
- Постоянное возбуждение.
- Параллельно-последовательное возбуждение.
Регулировка
Теперь поговорим о том, как можно регулировать скорость коллекторных двигателей. В связи с тем, что скорость вращения двигателя просто зависит от величины подаваемого напряжения, то для этого вполне подходят любые средства регулировки, способные выполнять эту функцию.
Перечислим для примера несколько таких вариантов:
- Лабораторный автотрансформатор (ЛАТР).
- Заводские регулировочные доски , используемые в бытовых приборах (вы можете использовать, в частности, те, которые используются в миксерах или пылесосах).
- Кнопки , используемые в конструкции электроинструмента.
- Бытовые регуляторы освещения с плавным ходом.
Однако у всех вышеперечисленных способов есть очень важный недостаток. Вместе со снижением скорости снижается и мощность мотора. В некоторых случаях его можно остановить даже одной рукой. В некоторых случаях это может быть приемлемо, но в большинстве случаев является серьезным препятствием.
Хорошим вариантом является регулирование скорости с помощью тахогенератора. Обычно устанавливается на заводе. При отклонениях скорости вращения двигателя на двигатель передается уже скорректированное питание, соответствующее требуемой скорости. Если в эту схему встроено управление вращением двигателя, то потери мощности не будет.
Как это выглядит конструктивно? Наиболее распространено реостатное регулирование вращения, выполненное на основе использования полупроводников.
В первом случае речь идет о переменном сопротивлении с механической регулировкой. Он подключается последовательно к коллекторному двигателю. Недостатком является дополнительное выделение тепла и дополнительная трата времени автономной работы. При таком способе регулировки происходит потеря мощности вращения двигателя. Это дешевое решение. Неприменимо для достаточно мощных двигателей по указанным причинам.
Во втором случае при использовании полупроводников управление двигателем осуществляется подачей определенных импульсов. Схема может изменять длительность таких импульсов, что в свою очередь изменяет скорость вращения без потери мощности.
Как сделать самому?
Существуют различные варианты схем регулировки. Приведем один из них более подробно.
Вот как это работает:
Изначально это устройство предназначалось для регулировки коллекторного двигателя в электромобилях. Речь шла об одном, где напряжение питания 24 В, но такая конструкция применима и к другим двигателям.
Слабое место схемы, которое было выявлено при испытаниях ее работы, это плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы элементов транзисторной схемы.
Рекомендуется ток не более 70 А. В этой цепи нет токовой и температурной защиты, поэтому рекомендуется встроить амперметр и контролировать ток визуально. Частота коммутации составит 5 кГц, она определяется конденсатором С2 емкостью 20 нФ.
При изменении силы тока эта частота может изменяться в пределах от 3 кГц до 5 кГц. Переменный резистор R2 служит для регулировки тока. При использовании электродвигателя в бытовых условиях рекомендуется использовать регулятор стандартного типа.
При этом рекомендуется подобрать значение R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее на транзисторы.
Печатная плата имеет размер 50 на 50 мм и выполнена из одностороннего стеклотекстолита:
На этой схеме дополнительно показаны 2 резистора 45 Ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения устройства. При использовании электродвигателя в качестве нагрузки необходимо блокировать цепь блокировочным (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению напряжения питания.
Работа устройства при отсутствии такого диода может привести к его повреждению из-за возможного перегрева. В этом случае диод нужно будет разместить на радиаторе. Для этого можно использовать металлическую пластину площадью 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. V В исходной схеме использовался стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Устройство в собранном виде выглядит так:
При изготовлении блока питания (на нижнем рисунке) провода должны быть соединены таким образом, чтобы в этих проводниках было минимум изгибов через которые проходят большие токи. Мы видим, что изготовление такого устройства требует определенных профессиональных знаний и навыков. Возможно, в некоторых случаях есть смысл использовать покупное устройство.
Критерии выбора и стоимость
Чтобы правильно подобрать наиболее подходящий тип регулятора, необходимо хорошо представлять виды таких устройств:
- Различные виды управления. Может быть векторная или скалярная система управления. Первые используются чаще, а вторые считаются более надежными.
- Мощность регулятора должна соответствовать максимально возможной мощности двигателя.
- По напряжению удобно выбрать прибор, обладающий наиболее универсальными свойствами.
- Частотные характеристики. Подходящий вам регулятор должен соответствовать самой высокой частоте, которую использует двигатель.
- Прочие характеристики. Здесь речь идет о размере, гарантийном сроке, размерах и других характеристиках.
В зависимости от назначения и потребительских свойств цены на регуляторы могут существенно различаться.
В большинстве своем они находятся в пределах примерно от 3,5 тыс. руб. до 9 тыс.:
- Регулятор скорости КА-18 ESC предназначен для моделей масштаба 1:10. Стоит 6890 рублей.
- Регулятор скорости MEGA коллектор (водонепроницаемый). Стоит 3605 руб.
- Регулятор скорости для моделей LaTrax 1:18. Его цена 5690 руб.
Электродвигатель необходим для плавного разгона и торможения. Широкое применение получили такие устройства в промышленности. С их помощью изменяют скорость движения конвейерных лент и вращение вентиляторов. Двигатели 12 Вольт используются в системах управления и автомобилях. Все видели переключатели, изменяющие скорость вращения вентилятора печки в автомобилях. Это один из видов регуляторов. Только он не рассчитан на плавный старт. Скорость вращения изменяется ступенчато.
Применение преобразователей частоты
Преобразователи частоты используются в качестве регуляторов скорости и 380В. Это высокотехнологичные электронные устройства, позволяющие кардинально менять характеристики тока (форму волны и частоту). В их основе мощные полупроводниковые транзисторы и широтно-импульсный модулятор. Вся работа устройства управляется блоком на микроконтроллере. Изменение скорости вращения ротора двигателя плавное.
Поэтому используются в нагруженных механизмах. Чем медленнее ускорение, тем меньшую нагрузку будет испытывать конвейер или редуктор. Все частотники оснащены несколькими степенями защиты — по току, по нагрузке, по напряжению и другими. Некоторые модели преобразователей частоты питаются от однофазного напряжения (220 Вольт), из него же делают трехфазные. Это позволяет подключать асинхронные двигатели в домашних условиях без использования сложных схем. Да и мощность при работе с таким устройством не пропадет.
Для каких целей используются регуляторы
В случае с асинхронными двигателями регуляторы скорости необходимы для:
- Значительной экономии энергии . .. Ведь не каждый механизм требует высокой скорости вращения двигателя — иногда ее можно уменьшить на 20-30%, а это уменьшит энергозатраты вдвое.
- Защита механизмов и электронных схем … С преобразователями частоты можно контролировать температуру, давление и многие другие параметры. Если двигатель работает как привод насоса, то в баке, в который он нагнетает воздух или жидкость, должен быть установлен датчик давления. А при достижении максимального значения мотор просто отключится.
- Осуществление плавного пуска . Нет необходимости использовать дополнительные электронные устройства — все можно сделать, изменив настройки преобразователя частоты.
- Снижение затрат на техническое обслуживание
… С помощью таких регуляторов скорости электродвигателей 220В снижается риск выхода из строя привода и отдельных механизмов.
Схема, по которой построены преобразователи частоты, широко распространена во многих бытовых приборах. Нечто подобное можно найти в источниках бесперебойного питания, сварочных аппаратах, стабилизаторах напряжения, блоках питания компьютеров, ноутбуков, зарядных устройствах для телефонов, блоках розжига ламп подсветки современных ЖК-телевизоров и мониторов.
Как работают регуляторы оборотов
Можно сделать регулятор скорости электродвигателя своими руками, но для этого потребуется изучить все технические моменты. Конструктивно можно выделить несколько основных узлов, а именно:
- Электродвигатель .
- Микроконтроллерная система управления и преобразователь.
- Привод и механизмы, связанные с ним.
В самом начале работы, после подачи напряжения на обмотки, ротор двигателя вращается с максимальной мощностью. Именно эта особенность отличает асинхронные машины от других. К этому добавляется нагрузка от механизма, который приводится в движение. В результате на начальном этапе потребляемая мощность и ток увеличиваются до максимума.
Вырабатывается много тепла. И обмотки, и провода перегреваются. Избавиться от этого поможет использование преобразователя частоты. Если поставить плавный пуск, то до максимальных оборотов (которые тоже регулируются прибором и могут быть не 1500 об/мин, а только 1000) двигатель будет разгоняться не сразу, а в течение 10 секунд (прибавить 100-150 об/мин каждую секунду). При этом значительно снизится нагрузка на все механизмы и провода.
Самодельный регулятор
Можно самостоятельно сделать регулятор скорости двигателя 12В. Для этого требуется многопозиционный переключатель и проволочные резисторы. С помощью последнего изменяется напряжение питания (а вместе с ним и скорость). Аналогичные системы можно использовать и для асинхронных двигателей, но они менее эффективны. Много лет назад широко применялись механические регуляторы на основе зубчатых передач или вариаторов. Но они были не очень надежными. Электронные средства показывают себя гораздо лучше. Ведь они не такие громоздкие и позволяют более тонко настроить привод.
Для изготовления регулятора вращения электродвигателя необходимо несколько электронных устройств, которые можно либо приобрести в магазине, либо снять со старых инверторных приборов. Хорошие результаты показывает симистор ВТ138-600 в схемах подобных электронных устройств. Чтобы произвести регулировку, потребуется включить в цепь переменный резистор. С его помощью изменяется амплитуда сигнала, поступающего на симистор.
Внедрение системы менеджмента
Для улучшения параметров даже самого простого устройства потребуется включить микроконтроллер управления в схему регулятора скорости двигателя. Для этого нужно подобрать процессор с подходящим количеством входов и выходов — для подключения датчиков, кнопок, электронных ключей. Для экспериментов можно использовать микроконтроллер AtMega128 — самый популярный и простой в использовании. В открытом доступе можно найти много схем с использованием этого контроллера. Найти их самостоятельно и применить на практике не составит труда. Чтобы он работал корректно, в него нужно прописать алгоритм — ответы на те или иные действия. Например, при достижении температуры 60 градусов (замер происходит на радиаторе прибора) должно произойти отключение электричества.
Наконец
Если вы решили не делать устройство самостоятельно, а приобрести уже готовое, то обратите внимание на основные параметры, такие как мощность, тип системы управления, рабочее напряжение, частота. Целесообразно рассчитать характеристики механизма, в котором планируется использовать регулятор напряжения электродвигателя. И не забудьте согласовать с параметрами преобразователя частоты.
Всем привет, наверное у многих радиолюбителей, как и у меня не одно хобби, а несколько. Помимо проектирования электронных устройств, я занимаюсь фотографией, видеосъемкой на зеркальную камеру и монтажом видео. Мне, как видеооператору, нужен был слайдер для видеосъемки, и сначала вкратце объясню, что это такое. На фото ниже показан заводской слайдер.
Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Они аналогичны рельсовой системе, используемой в широкоэкранном кино. С его помощью создается плавное движение камеры вокруг снимаемого объекта. Еще один очень мощный эффект, который можно использовать при работе с ползунком, — это возможность приблизиться или отдалиться от объекта. На следующем фото показан двигатель, который я выбрал для слайдера.
Ползунок приводится в движение двигателем постоянного тока на 12 В. В интернете была найдена схема регулятора двигателя, который перемещает каретку ползуна. На следующем фото индикатор питания на светодиоде, тумблер управляющий реверсом и выключатель питания.
При эксплуатации такого устройства важно, чтобы была плавная регулировка оборотов, плюс небольшое включение реверса двигателя. Скорость вращения вала двигателя, в случае использования нашего регулятора, плавно регулируется поворотом ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта, увлекающийся фотографией, и кто-то еще захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора . На следующем рисунке показана принципиальная схема регулятора для двигателя:
Схема регулятора
Схема очень проста и легко может быть собрана даже начинающим радиолюбителем. Из плюсов сборки данного устройства могу назвать его невысокую стоимость и возможность настройки под свои нужды. На рисунке показана печатная плата регулятора:
Но одними ползунками область применения этого регулятора не ограничивается, его легко можно использовать как регулятор скорости, например, расточной станок, самодельный дремель с питанием на 12 вольт, или компьютерный кулер, например, размерами 80 х 80 или 120 х 120 мм. Также я разработал схему реверса двигателя, или другими словами, быстрого изменения вращения вала в другую сторону. Для этого я использовал шестиконтактный тумблер на 2 положения. На следующем рисунке показана схема его подключения:
Средние контакты тумблера, обозначенные (+) и (-), подключаются к контактам на плате, обозначенным М1.