Содержание
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения.
 Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения. - — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
 Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
← Отопление по — новому, или как правильно выбрать котел для автономного отопления
|
Торцевые уплотнения, причины выхода со строя в насосах →
Регулирование частоты вращения асинхронного двигателя
Регулирование частоты вращения асинхронного двигателя определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых он используются. Оно характеризуется следующими основными показателями.
Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя nmах к его минимальной частоте вращения nmin:
D=nmax/nmin. (54)
(54)
Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую.
Направление возможного изменения частоты вращения двигателя (зона регулирования). При номинальных условиях работы (напряжении и частоте питающей сети) асинхронный двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной. Эти характеристики носят название искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить искусственные характеристики, располагающиеся только ниже естественной. Другие методы обеспечивают регулирование частоты вращения асинхронного двигателя выше и ниже естественной характеристики.
Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Регулирование частоты вращения асинхронного двигателя может производиться способом воздействия на него со стороны статора или со стороны ротора.
Чтобы рассмотреть возможные способы регулирования частоты вращения, сначала получим ее выражение. В соответствии с приведенными ранее формулами (3), (4) можно записать, что частота вращения ротора n, об/мин, равна:
В соответствии с приведенными ранее формулами (3), (4) можно записать, что частота вращения ротора n, об/мин, равна:
(55)
где f1 — частота питающей сети, Гц; р — число пар полюсов двигателя; s — скольжение, отн. ед.
Из формулы (55) следует, что существуют три основных способа регулирования частоты вращения:
- изменением частоты f1 питающего двигатель напряжения;
- изменением числа пар полюсов р;
- изменением скольжения s.
Воздействие на асинхронный двигатель может осуществляться как со стороны статора, так и со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Электрические асинхронные двигатели — синхронная скорость
Синхронная скорость электрического асинхронного двигателя определяется
- источником питания частотой и
- числом полюсов в обмотке двигателя.

Синхронная скорость может быть рассчитана как:
n = F (2 / P) 60 (1)
Где
N = Скорость ротации сблай об/мин)
F = частота электроснабжения (Гц, циклы/сек, 1/с)
P = Количество поляков
Примечание 9000- Anduduction Motor. никогда не достигнет своей синхронной скорости. Если бы это было так, то ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между полем статора и ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничивается скоростью ниже синхронной скорости, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Пример — Синхронная скорость электродвигателя с двумя полюсами
На двигатель с двумя полюсами подается питание с частотой 50 Гц (1/с) . Скорость вращения можно рассчитать как
Скорость вращения можно рассчитать как
n = (50 1/с) (2 / 2) (60 с/мин)
= 3000 об/мин (1/мин) 8 скорость вращения при разных частотах и числе полюсов Скорость вращения вала — n — (rev/min, rpm) Frequency
— f —
(Hz) Number of poles — p — 2 4 6 8 10 12 10 600 300 200 150 120 100 20 1200 600 400 300 240 200 30 1800 900 600 450 360 300 40 2400 1200 800 600 480 400 50 1) 3000 1500 1000 750 600 500 60 2) 3600 1800 1200 900 720 600 70 4200 2100 1400 1050 840 700 80 4800 2400 1600 1200 960 800 90 5400 2700 1800 1350 1080 900 100 6000 3000 2000 1500 1200 1000 
Что определяет скорость вращения двигателя?
- Дом
- Блог
- Что определяет скорость вращения двигателя?
Электродвигатели отличаются своим разнообразием и широким диапазоном типоразмеров. Существуют двигатели с дробной мощностью (л.с.) для небольших бытовых приборов и двигатели мощностью в тысячи л.с. для тяжелого промышленного использования. Другие характеристики, указанные на паспортных табличках двигателей, включают их входное напряжение, номинальный ток, энергоэффективность и скорость в об/мин.
Скорость вращения электродвигателя зависит от двух факторов: его физической конструкции и частоты (Гц) питающего напряжения. Инженеры-электрики выбирают скорость двигателя в зависимости от потребностей каждого приложения, подобно тому, как механическая нагрузка определяет требуемую мощность.
Убедитесь, что в вашем здании есть подходящий электродвигатель для каждого применения.

Как частота напряжения связана со скоростью двигателя
В зависимости от страны источник питания будет иметь частоту 60 Гц или 50 Гц. Хотя трехфазный двигатель будет вращаться с обоими источниками питания, могут возникнуть проблемы с производительностью, если двигатель указан для одной частоты, а используется для другой.
Поскольку источник питания с частотой 60 Гц переключает полярность на 20 % быстрее, чем источник питания с частотой 50 Гц, двигатель, рассчитанный на 50 Гц, будет вращаться с частотой вращения на 20 % выше. Крутящий момент двигателя остается относительно постоянным, а более высокая скорость приводит к более высокой мощности на валу. Двигатель также выделяет больше тепла, но охлаждающий вентилятор также ускоряется вместе с валом, помогая отводить лишнее тепло. Двигатель также имеет тенденцию потреблять больше реактивного тока, что снижает его коэффициент мощности.
Подключение двигателя 60 Гц к источнику питания 50 Гц — более деликатный вопрос.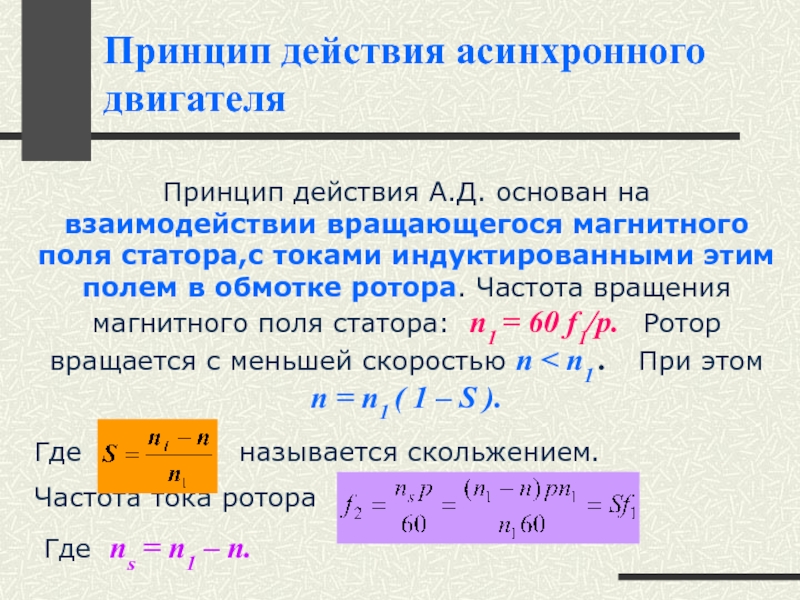 Снижение скорости при том же напряжении может привести к насыщению магнитопровода двигателя, увеличению тока и перегреву устройства. Самый простой способ предотвратить насыщение — снизить входное напряжение, и в идеале отношение В/Гц должно оставаться постоянным:
Снижение скорости при том же напряжении может привести к насыщению магнитопровода двигателя, увеличению тока и перегреву устройства. Самый простой способ предотвратить насыщение — снизить входное напряжение, и в идеале отношение В/Гц должно оставаться постоянным:
.
- Двигатель с частотой 60 Гц, работающий на частоте 50 Гц, имеет 83,3% своей номинальной частоты.
- Чтобы сохранить постоянное отношение В/Гц, входное напряжение также должно быть снижено до 83,3%.
- Если электродвигатель нормально работает при 240 В и 60 Гц, входное напряжение при 50 Гц должно быть 200 В, чтобы сохранить соотношение 4 В/Гц.
Электропроводка двигателя и количество полюсов
Постоянный магнит имеет два полюса, но двигатели могут быть подключены таким образом, чтобы их магнитное поле имело большее количество полюсов. Двухполюсный двигатель совершает полный оборот с одной сменой полярности, в то время как четырехполюсный двигатель поворачивается только на 180° с одним переключателем полярности. Чем больше полюсов, тем ниже скорость двигателя: если все остальные факторы равны, 4-полюсный двигатель будет вращаться с половиной скорости 2-полюсного двигателя.
Чем больше полюсов, тем ниже скорость двигателя: если все остальные факторы равны, 4-полюсный двигатель будет вращаться с половиной скорости 2-полюсного двигателя.
- Источник питания частотой 60 Гц меняет полярность 60 раз в секунду, а двухполюсный двигатель будет вращаться со скоростью 3600 об/мин при подключении к этому источнику. Четырехполюсный двигатель будет вращаться только со скоростью 1800 об/мин.
- Для двигателей 50 Гц скорость составляет 3000 об/мин с 2 полюсами и 1500 об/мин с 4 полюсами.
Концепцию можно обобщить следующим уравнением:
Используя это уравнение, 4-полюсный двигатель с частотой 60 Гц имеет скорость 1800 об/мин, а 6-полюсный двигатель с частотой 50 Гц имеет скорость 1000 об/мин. Однако на самом деле это скорость магнитного поля, называемая синхронной скоростью, которая не всегда равна скорости вращения вала.
- В синхронном двигателе , ротор использует постоянный магнит или электромагнит для вращения с расчетной скоростью.
- С другой стороны, асинхронный двигатель будет работать немного ниже расчетной скорости вращения. Так работает электромагнитная индукция, и это не следует рассматривать как неисправность.

Если электродвигатель имеет паспортную скорость 1800 об/мин, можно сделать вывод, что агрегат представляет собой 4-х полюсный синхронный двигатель, рассчитанный на 60 Гц. С другой стороны, если скорость, указанная на паспортной табличке, меньше, например 1760 об/мин, агрегат является асинхронным двигателем.
Преобразователь частоты может управлять скоростью двигателя, регулируя входную частоту, как следует из его названия. ЧРП также может модулировать напряжение, чтобы поддерживать соотношение В/Гц ниже точки насыщения магнитного сердечника. Благодаря этой функции частотно-регулируемый привод не повреждает двигатель, даже если скорость снижается ниже значения, указанного на паспортной табличке. Основным недостатком частотно-регулируемых приводов является возникновение гармонических искажений, поскольку они являются нелинейными нагрузками, но это можно компенсировать с помощью фильтров гармоник.